
高速三次元計測装置及び高速三次元計測方法
【課題】被測定物の見かけの形状をできるだけ歪ませることなく形状計測できると共に、長い物や連続的に移動する物であっても形状計測できる高速三次元計測装置を提供する。
【解決手段】高速三次元計測装置は、被測定物の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するパターン光源と、前記被測定物からの前記縞状パターン光の反射光を前記一つの方向に沿ったラインについて一組の光信号として取り込むラインカメラと、取り込んだ一組の前記光信号について、前記縞状パターン光との関係に基づいて前記被測定物の高さを算出する計測部と、を備える。
【解決手段】高速三次元計測装置は、被測定物の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するパターン光源と、前記被測定物からの前記縞状パターン光の反射光を前記一つの方向に沿ったラインについて一組の光信号として取り込むラインカメラと、取り込んだ一組の前記光信号について、前記縞状パターン光との関係に基づいて前記被測定物の高さを算出する計測部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体の形状を非接触で計測する高速三次元計測装置及び高速三次元計測方法に関する。
【背景技術】
【0002】
従来、位相シフト法による3次元計測では、被測定物を固定(静止)した状態に保ち、その被測定物の全体にわたって、位相シフトさせながら縞状パターンを投影して、エリアセンサカメラで被測定物全体による格子画像を撮影していた。これによって、被測定物全体の各箇所における、投影した縞状パターンと、撮影した格子画像との間の位相差を算出し、各箇所での位相差を高低差に変換して3次元計測していた。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】研究成果報告書「高精度高速形状変形計測法」和歌山大学システム工学部 光メカトロニクス学科 光波画像計測研究グループ、教授 森本吉春 他、2001年4月
【非特許文献2】研究成果報告書「位相信頼性評価値とDMDカメラを用いた三次元形状計測」和歌山大学システム工学部 李 志遠、2007年2月
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、従来の3次元計測装置では、一方向から測定物の全体を観測した場合には被測定物は、遠近による歪みが現れるため台形形状の画像となるという問題がある。また、その遠近による歪みは形状測定の精度にも影響を生じるという問題がある。
【0005】
さらに、被測定物の全体を同時に観測するため、被測定物を静止させて観測する必要があった。このため、長い物や連続的に移動する物は測定できなかった。
【0006】
そこで、本発明の目的は、被測定物の見かけの形状をできるだけ歪ませることなく形状計測できると共に、長い物や連続的に移動する物であっても形状計測できる高速三次元計測装置を提供することである。
【課題を解決するための手段】
【0007】
本発明に係る高速三次元計測装置は、被測定物の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するパターン光源と、
前記被測定物からの前記縞状パターン光の反射光を前記一つの方向に沿ったラインについて一組の光信号として取り込むラインカメラと、
取り込んだ一組の前記光信号について、前記縞状パターン光との関係に基づいて前記被測定物の高さを算出する計測部と、
を備えたことを特徴とする。
【0008】
また、前記パターン光源は、第1及び第2のパターン光源を有してもよい。
【0009】
さらに、前記第1のパターン光源は、第1の周期で光強度が変化する第1の縞状パターン光を照射し、前記第2のパターン光源は、第2の周期で光強度が変化する第2の縞状パターン光を照射してもよい。
この場合、前記計測部は、前記第1の縞状パターン光と、その反射光との間の第1の位相差と、前記第2の縞状パターン光と、その反射光との間の第2の位相差と、を用いて前記被測定物の連続的な高さの変化を算出することができる。
【0010】
またさらに、前記第1及び第2のパターン光源を交互に照射してもよい。
【0011】
また、前記第1のパターン光源は、第1の色で前記第1の縞状パターン光を照射し、前記第2のパターン光源は、第2の色で前記第2の縞状パターン光を照射すると共に、前記第1及び第2のパターン光源を同時に照射してもよい。
【0012】
さらに、前記パターン光源は、光源から、レンズと、光透過量が周期的に変化するパターンを設けたレチクルと、を介して光を照射して、前記被測定物の上に一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射してもよい。
【0013】
また、前記パターン光源は、前記レチクルの光軸を前記レンズの光軸から外して、前記レンズの光軸に垂直な面と、前記レチクルの面を含む平面と、前記被測定物の面と、が一つの線で交差するように配置してもよい。
【0014】
また、前記レチクルは、一つの方向に沿って光透過量が変化する周期が等間隔のパターンが設けられていてもよい。
【0015】
さらに、前記パターン光源の前記レチクルは、前記パターン光源の光軸に垂直な面と前記被測定物の面とのなす角度(θ)と、前記パターン光源の光源から光軸に沿った前記被測定物までの距離(D)と、前記パターン光源の光源と前記レチクルとの距離(d)とを定数とし、前記被測定物上の前記光源からの光軸との交点からの距離(L)をパラメータとして表される下記の関係式、
T=d・L・cosθ/(D−L・sinθ)
で規定される、前記レチクル上の前記光源からの光軸との交点からの距離(T)で、一つの方向に沿って光透過量が変化するパターンが設けられていてもよい。これによって、前記パターン光源から前記レチクルを介して光強度が一定周期で変化する縞状パターン光を前記被測定物の上に照射することができる。
【0016】
またさらに、前記パターン光源の前記レチクルは、前記パターン光源の光軸に垂直な面と前記被測定物の面とのなす角度(θ)と、前記パターン光源の光軸に垂直な面と前記レチクルの面とのなす角度(φ)と、前記パターン光源の光源から光軸に沿った前記被測定物までの距離(D)と、前記パターン光源の光源と前記レチクルとの距離(d)とを定数とし、前記被測定物上の前記光源からの光軸との交点からの距離(L)をパラメータとして表される下記の関係式、
U=d・L・cosθ/(D・cosφ+L・sin(φ−θ))
で規定される、前記レチクル上の前記光源からの光軸との交点からの距離(U)で、一つの方向に沿って光透過量が変化するパターンが設けられていてもよい。これによって、前記パターン光源は、前記レチクルを介して光強度が一定周期で変化する縞状パターン光を前記被測定物の上に照射することができる。
【0017】
また、前記パターン光源は、前記光源としてラインレーザを用いてもよい。
【0018】
またさらに、前記ラインカメラは、外部からの光を取り込むレンズの光軸を前記ラインセンサの光軸から外して、前記ラインセンサの光軸に垂直な面と、前記レンズの面を含む平面と、前記被測定物の面と、が一つの線で交差するように配置してもよい。
【0019】
また、前記計測部は、取り込んだ一組の前記光信号について、前記縞状パターン光の周期を用いた位相シフトモアレ法によって、一組の前記信号列から複数組の疑似信号列を生成し、得られた複数組の前記疑似信号列を用いて、前記被測定物の高さを算出してもよい。
【0020】
さらに、前記計測部は、取り込んだ一組の前記光信号について、フーリエ変換格子法を用いて、前記縞状パターン光の光強度と前記被測定物からの反射光の光強度との位相差を求め、高さを算出してもよい。
【0021】
また、本発明に係る高速三次元計測方法は、被測定物の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するステップと、
前記被測定物からの前記縞状パターン光の反射光を前記一つの方向に沿ったラインについて一組の光信号として取り込むステップと、
取り込んだ一組の前記光信号について、前記縞状パターン光との関係に基づいて前記被測定物の高さを算出するステップと、
を含むことを特徴とする。
【0022】
さらに、前記被測定物の高さを算出するステップでは、取り込んだ一組の前記光信号について、前記縞状パターン光の周期を用いた位相シフトモアレ法によって、一組の前記信号列から複数組の疑似信号列を生成し、得られた複数組の前記疑似信号列を用いて、前記被測定物の高さを算出してもよい。
【0023】
前記被測定物の高さを算出するステップでは、取り込んだ一組の前記光信号について、フーリエ変換格子法を用いて、前記縞状パターン光の光強度と前記被測定物からの反射光の光強度との位相差を求め、高さを算出してもよい。
【発明の効果】
【0024】
本発明の高速三次元計測装置及び高速三次元計測方法によれば、非測定物を連続搬送状態で形状計測することが可能である。また、シート状の実質的にエンドレスに延在する被測定物の検査も可能である。
【図面の簡単な説明】
【0025】
【図1】本発明の実施の形態1に係る高速三次元計測装置の構成を示すブロック図である。
【図2】パターン光源の内部構成を示す概略図である。
【図3】ラインカメラの内部構成を示す概略図である。
【図4】パターン光源を斜め上方に配置し、ラインカメラを真上に配置する構成を示す概略図である。
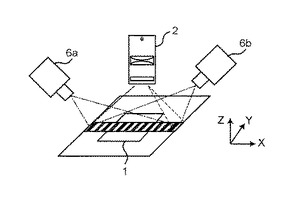
【図5】パターン光源を真上に配置して、ラインカメラを斜め上方に配置する構成を示す概略図である。
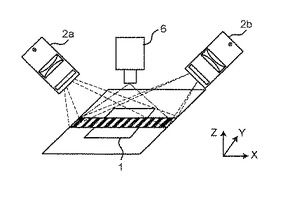
【図6】パターン光源及びラインカメラを互いに相対する斜め上方に配置する構成を示す概略図である。
【図7】実施の形態1に係る高速三次元計測方法のフローチャートである。
【図8】(a)〜(k)は、位相シフトモアレ法を説明する概略図である。
【図9】(a)〜(e)はフーリエ変換格子法による位相差の算出を説明する概略図である。
【図10】実施の形態2に係る高速三次元計測装置におけるパターン光源と被測定物との配置関係を示す概略図である。
【図11】実施の形態3に係る高速三次元計測装置におけるラインカメラと被測定物との配置関係を示す概略図である。
【図12】実施の形態4に係る高速三次元計測装置の構成を示す概略図である。
【図13】実施の形態5に係る高速三次元計測装置の構成を示す概略図である。
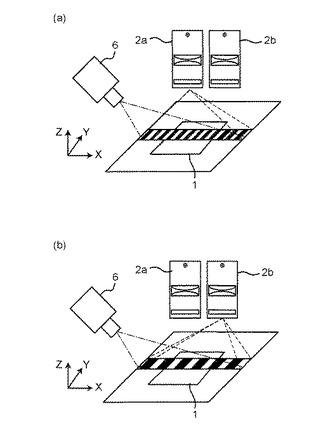
【図14】(a)及び(b)は、実施の形態6に係る高速三次元計測装置の構成を示す概略図である。
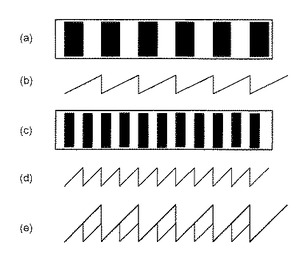
【図15】(a)は、実施の形態6に係る高速三次元計測装置におけるパターン光源2bによる周期の長い縞状パターン光を示す概略図であり、(b)は、(a)の縞状パターン光とその反射光との位相差の変化を示す概略図であり、(c)は、パターン光源2aによる周期の短い縞状パターン光を示す概略図であり、(d)は、(c)の縞状パターン光とその反射光との位相差の変化を示す概略図であり、(e)は、(b)の結果に基づいて(d)の位相差の変化について部分的に位相接続を行った概略図である。
【図16】実施の形態7に係る高速三次元計測装置におけるパターン光源と被測定物との配置関係を示す概略図である。
【図17】実施の形態7に係る高速三次元計測装置におけるパターン光源のレチクル上のパターンと被測定物上の縞状パターンとの関係を示す概略図である。
【図18】実施の形態8に係る高速三次元計測装置におけるパターン光源のレチクル上のパターンと被測定物上の縞状パターンとの関係を示す概略図である。
【発明を実施するための形態】
【0026】
本発明の実施の形態に係る高速三次元計測装置及び高速三次元計測方法について添付図面を用いて説明する。なお、図面において実質的に同一の部材には同一の符号を付している。
【0027】
(実施の形態1)
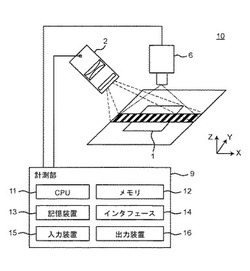
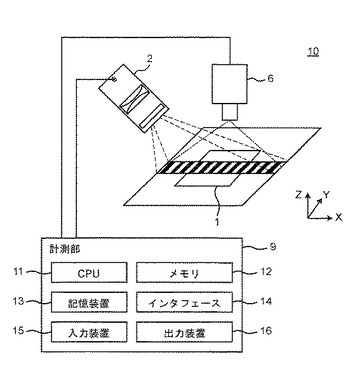
図1は、本発明の実施の形態1に係る高速三次元計測装置の構成を示すブロック図である。この高速三次元計測装置10は、パターン光源2と、ラインカメラ6と、計測部9と、を備える。図1では、パターン光源2は被測定物1の斜め上方に配置され、ラインカメラ4は被測定物1の真上に配置されている。パターン光源2は、斜め上方から、被測定物1の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射する。ラインカメラ6は、被測定物1からの縞状パターン光の反射光を上記一つの方向に沿ったラインについて一組の光信号として取り込む。計測部9は、取り込んだ一組の光信号について、縞状パターン光との関係に基づいて被測定物1の高さ(形状)を算出する。
【0028】
<パターン光源>
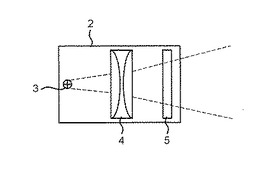
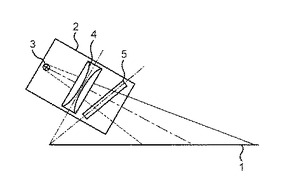
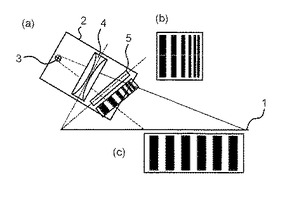
図2は、パターン光源2の内部構成を示す概略図である。パターン光源2は、光源3と、レンズ4と、光透過量が周期的に変化するレチクル5とを備える。このパターン光源2によって、光源3から、レンズ4とレチクル5とを介して光を照射する。これによって、被測定物1の上に一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射することができる。
【0029】
<ラインカメラ>
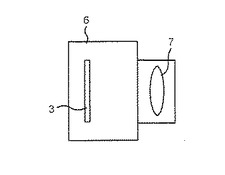
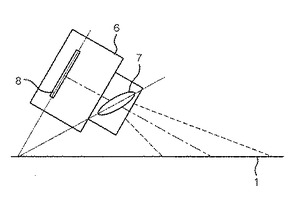
図3は、ラインカメラ6の内部構成を示す概略図である。ラインカメラ6は、被測定物1からの反射光を、レンズ7を介して一つの方向に沿ったラインについて、ラインセンサ8で一組の光信号として取り込む。
【0030】
<パターン光源とラインカメラとの位置関係>
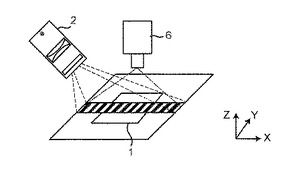
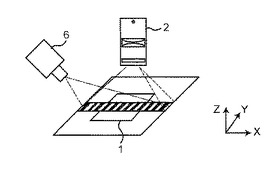
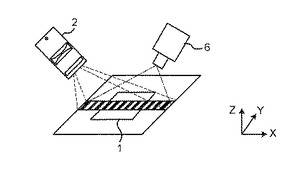
パターン光源2とラインカメラ6とは、それぞれ被測定物1に対して真上、又は、斜め上方のいずれかの配置とすることができる。そのためパターン光源2とラインカメラ6との位置関係としては、様々な配置をとりうる。例えば、図4から図6のいずれの配置であってもよい。図4では、図1と同様にパターン光源2を斜め上方に配置して、被測定物1の上に縞状パターン光を照射している。また、ラインカメラ6を真上に配置している。図5では、図4とは逆に、パターン光源2を真上に配置して、被測定物1の上に縞状パターン光を照射し、ラインカメラ6を斜め上方に配置している。図6では、パターン光源2及びラインカメラ6を互いに相対する斜め上方に配置している。なお、パターン光源2とラインカメラ6との配置は、図4から図6の場合に限られない。
【0031】
<計測部>
計測部9は、取り込んだ一組の光信号について、縞状パターン光と反射光との位相差に基づいて被測定物1の高さ(形状)を算出する。計測部9としては、例えば、コンピュータで構成されていてもよい。計測部がコンピュータで構成される場合には、CPU11、メモリ12、記憶装置13、インタフェース14、入力装置15、出力装置16等を備える。
【0032】
<高速三次元計測方法>
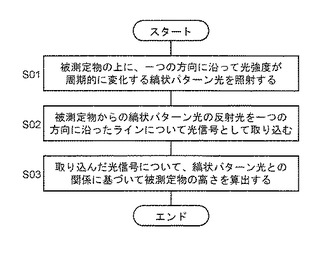
図7は、実施の形態1に係る高速三次元計測方法のフローチャートである。
a)被測定物1の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するステップ(S01)と、
b)被測定物1からの縞状パターン光の反射光を一つの方向に沿ったラインについて一組の光信号として取り込むステップ(S02)と、
c)取り込んだ一組の光信号について、縞状パターン光との関係に基づいて被測定物1の高さを算出するステップ(S03)と、
を含む。
【0033】
上記の被測定物1の高さを算出するステップ(S03)では、例えば、
(1)位相シフトモアレ法
(2)フーリエ変換格子法
のいずれかについても用いることができる。なお、被測定物1の高さを算出するステップは、上記の2つの方法に限られない。
以下に、それぞれの方法について説明する。
【0034】
(1)位相シフトモアレ法
取り込んだ一組の光信号について、縞状パターン光の周期を用いた位相シフトモアレ法によって、一組の信号列から複数組の疑似信号列を生成する。次いで、得られた複数組の疑似信号列を用いて、照射した縞状パターン光と被測定物1からの反射光との位相差を求め、位相差に基づいて被測定物1の高さを算出する。
【0035】
位相シフトモアレ法では、取り込んだ一組の光信号について、作成する疑似信号列の組数に対応する画素数ごとにサンプリングして、とびとびの画素値を有する疑似信号列を作成し、サンプリングする画素をずらせて同様のサンプリングを行って、1組の信号列から複数組の疑似信号列を生成する。
【0036】
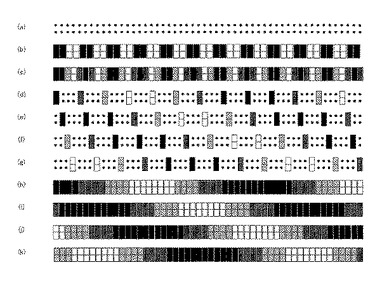
図8(a)〜(k)は、位相シフトモアレ法を説明する概略図である。図8(a)の黒点は、ラインセンサのサンプリング点(画素)を示すものである。図8(b)は、パターン光源2から照射される明暗の帯が1ラインにわたって交互に繰り返された縞状パターン光のイメージを示すものである。図8(c)は、図8(b)の縞状パターン光の反射光の1ラインを取り込んだ光信号を示すものである。図8(d)は、図8(c)の信号列で、端から一つめの画素から4画素おきに間引いた疑似信号列を示すものである。この場合、4画素おきにしかデータがない。図8(e)は、図8(c)の信号列で、端から二つめの画素から4画素おきに間引いた疑似信号列を示すものである。図8(f)は、図8(c)の信号列で、端から三つめの画素から4画素おきに間引いた疑似信号列を示すものである。図8(g)は、図8(c)の信号列で、端から四つめの画素から4画素おきに間引いた疑似信号列を示すものである。図8(h)は、図8(d)の疑似信号列について、データが存在する画素に基づいて、その間のデータが存在しない画素に対して補間演算を行ってデータを生成した疑似信号列を示すものである。ただし、図8(h)では間のデータは左信号と同一となっているが、補間演算によって信号の強弱は変化する。図8(i)は、図8(e)の疑似信号列について、データが存在する画素に基づいて、その間のデータが存在しない画素に対して補間演算を行ってデータを生成した疑似信号列を示すものである。ただし、図8(i)では間のデータは左信号と同一となっているが、補間演算によって信号の強弱は変化する。図8(j)は、図8(f)の疑似信号列について、データが存在する画素に基づいて、その間のデータが存在しない画素に対して補間演算を行ってデータを生成した疑似信号列を示すものである。ただし、図8(j)では間のデータは左信号と同一となっているが、補間演算によって信号の強弱は変化する。図8(k)は、図8(g)の疑似信号列について、データが存在する画素に基づいて、その間のデータが存在しない画素に対して補間演算を行ってデータを生成した疑似信号列を示すものである。ただし、図8(j)では間のデータは左信号と同一となっているが、補間演算によって信号の強弱は変化する。
【0037】
以下に位相シフトモアレ法の手順を説明する。
(ア)パターン光源2から照射される明暗の帯が1ラインにわたって交互に繰り返された縞状パターン光(図8(b))の反射光の1ラインを取り込んで、図8(c)で示される一組の光信号列を得る。
(イ)図8(c)の光信号列について、作成しようとする疑似信号列が4組の場合には、照射する縞状パターン光(図8(b))の周期に合わせて4画素おきに間引いてサンプリングする。この場合、図8(c)のラインに沿って4画素ごとにサンプリングを行って、図8(d)〜(g)の4画素ごとにとびとびのデータを有する4組の疑似信号列を得る。
(ウ)各組の疑似信号列について、データが存在する画素に基づいて、その間のデータが存在しない画素に対して補間演算を行ってデータを生成した4組の疑似信号列(図8(h)〜図8(k))を得る。
【0038】
上記位相シフトモアレ法で得られた複数組の疑似信号列を用いて、照射した縞状パターン光と被測定物1からの反射光との位相差を求め、位相差に基づいて被測定物1の高さを算出する。例えば、上記の例では4組の疑似信号列は、照射する縞状パターン光の周期が4画素であるのに対して、1画素ずつずらしてサンプリングしており、π/2ごと位相シフトさせた場合に対応する。そこで、このπ/2ごと位相シフトさせた4組の疑似信号列に基づいて、各画素ごとの位相差を求め、この位相差に基づいて高さを算出することができる。これにより、被測定物1を形状計測することができる。具体的には、上記4組の疑似信号列について、各画素ごとについて、0、π/2、π、3π/2の各位相での画素値をプロットして得られる画素値の余弦曲線から各画素での位相差を得ることができる。
今回は、4画素おきに間引いてサンプリングを行い、位相差を求めたが、3画素おき以上で間引いたサンプリングであれば、位相差を計算することができる。
なお、位相シフトモアレ法の詳細については、例えば、非特許文献1や非特許文献2などの文献に示されている。
【0039】
(2)フーリエ変換格子法
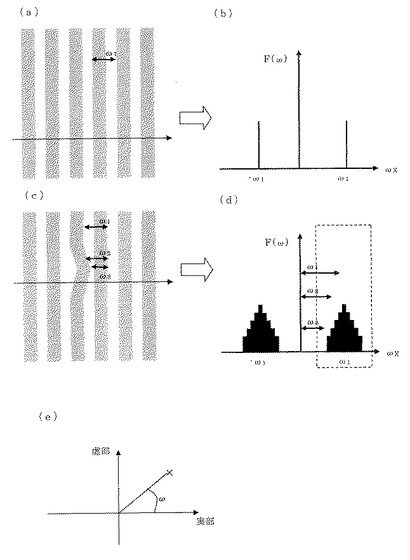
フーリエ変換格子法では、取り込んだ一組の光信号について、反射光についてフーリエ変換を行った後、その1次高調波のみを逆フーリエ変換して、位相差を求め、位相差に基づいて高さを算出する。図9(a)〜(e)はフーリエ変換格子法による位相差の算出を説明する概略図である。
(ア)平面に縞状パターン光を投影した場合、図9(a)のようになり、この反射光をフーリエ変換すると、図9(b)のように縞状パターン光の周期に対応する箇所(ω1、−ω1)の2箇所に鋭いピークを生じる。
(イ)一方、凹凸面に縞状パターン光を投影した場合、凹凸部分で縞の位置が位相ω1からずれて、図9(c)のようになる。この反射光をフーリエ変換すると、図9(d)に示すように、縞のずれの位相ω2、ω3の対応する成分を示す。
(ウ)(イ)について、フーリエ変換後の1次調和波の付近について逆フーリエ変換を行って、縞のずれの位相ω2、ω3等の成分を求めることができる。ここで、2次高調波以上の高調波はノイズによるものであるので逆フーリエを行う必要はない。また、位相ωの正負の成分は波の進行方向を表している(図9(e))。上記の場合には静止画なので、方向性がないため、正の成分(ω)のみを逆フーリエ変換すればよい。
なお、逆フーリエ変換は、
I(x、y)=C1exp(jω(x、y))
と表すことができる。この式から複素解析的に位相ωを求める事ができる。各画素ごとに得られたω(x、y)は1ラインについての位相画像となる。
得られた位相差に基づいて各画素の位置の高さを求めることができる。
なお、フーリエ変換格子法の詳細については、例えば、非特許文献1などの文献に示されている。
【0040】
(実施の形態2)
図10は、実施の形態2に係る高速三次元計測装置におけるパターン光源2と被測定物との配置関係を示す概略図である。この高速三次元計測装置では、実施の形態1に係る高速三次元計測装置と比較すると、光源3の光軸に対して、レチクル5の光軸を傾けて配置していることを特徴とする。さらに具体的には、レンズ4の光軸に垂直な面と、レチクル5の面と、被測定物1の面とが一つの線で交差するようにレチクル5の光軸を傾けて配置する。上記の配置の条件は「シャインプルーフの原理」と呼ばれるものであり、この条件を満たす場合には、レチクル5のパターンに対応して、被測定物1の上に照射される縞状パターンの手前と奥とで同時に焦点を合わせることができる。
【0041】
(実施の形態3)
図11は、実施の形態3に係る高速三次元計測装置におけるラインカメラ6と被測定物1との配置関係を示す概略図である。この高速三次元計測装置では、実施の形態1に係る高速三次元計測装置と比較すると、ラインカメラ6自体の光軸に対して、レンズ7の光軸を傾けて配置していることを特徴とする。さらに具体的には、図11に示されるように、ラインセンサ8の光軸に垂直な面と、レンズ7の面を含む平面と、被測定物1の面と、が一つの線で交差するように配置される。これはパターン光源2のレチクル5の配置と同様に「シャインプルーフの原理」と呼ばれるものであり、上記条件を満たす場合には、ラインセンサ8への光信号の取り込みにおいて被測定物の手前と奥との両方について焦点を合わせることができる。
なお、実施の形態3において、実施の形態1の構成に加えて、実施の形態2のパターン光源の構成を同時に用いてもよい。
【0042】
(実施の形態4)
図12は、実施の形態4に係る高速三次元計測装置の構成を示す概略図である。この高速三次元計測装置では、複数のパターン光源2a、2bを用いて、それぞれ互いに異なる方向から光を照射することを特徴とする。これによって、一方のパターン光源からだけでは影となって高さを計測できない死角となる部分に対して、もう一つのパターン光源から光を照射できるので被測定物上での死角部分を減らすことができる。この実施の形態では、2つの光源を用いたが、より多くの光源を用いて計測することもできる。
なお、この実施の形態4においても、実施の形態1の構成に加えて、実施の形態2のラインカメラ、及び/又は、実施の形態3のパターン光源の構成を同時に用いてもよい。
【0043】
(実施の形態5)
図13は、実施の形態5に係る高速三次元計測装置の構成を示す概略図である。この高速三次元計測装置では、複数のラインカメラを使用している。従来、一つのラインカメラを用いた場合には、カメラ位置と被測定物の形状との関係で一つのラインカメラでは観測できない部分、つまり死角部分が生じる場合があった。この高速三次元計測装置では、2台のラインカメラを用いて観測できるので、一方のラインカメラの死角部分を他方のラインカメラでカバーできるので、全体として死角部分を減らすことができる。この実施の形態では、2つのラインカメラを用いたが、より多くのラインカメラを用いて計測することもできる。
なお、この実施の形態5においても、実施の形態1の構成に加えて、実施の形態2から4の少なくとも一つの構成を同時に用いてもよい。
【0044】
(実施の形態6)
図14(a)及び(b)は、実施の形態6に係る高速三次元計測装置の構成を示す概略図である。この高速三次元計測装置では、実施の形態4と比較すると、複数のパターン光源を用いる点で同様であるが、さらにそれぞれのパターン光源2a、2bから照射する縞状パターン光の周期を互いに異なるものとする点で相違する。2つのパターン光源2a、2bから照射する縞状パターン光の周期を互いに異なるものとすることによって、それぞれのパターン光源からの光の反射光から算出される位相差に対応する周期(長さ方向での周期)が異なる。例えば、図15(a)では、図15(c)の場合に対して、長さ方向で2倍の周期で位相が変化する。そのため、位相差πから−πへの不連続変化となる箇所がそれぞれの反射光で異なるので、それぞれの反射光による位相差の変化を参照することによって、周囲の画素値を考慮することなく位相接続を確実に行うことができる。
尚、この実施の形態では、2つのパターン光源を用いたが、より多くのパターン光源を用いて実施することもできる。また、この実施の形態6ではパターン光源が被測定物1の真上にあるが、斜めからの照射でもかまわない。この際、実施の形態2で説明されたパターン光源を用いることができる。
なお、この実施の形態6においても、実施の形態1の構成に加えて、実施の形態2から5の少なくとも一つの構成を同時に用いてもよい。
【0045】
図15(a)は、パターン光源2bによる周期の長い縞状パターン光を示す概略図であり、図15(b)は、図15(a)の縞状パターン光とその反射光との位相差の変化を示す概略図であり、図15(c)は、パターン光源2aによる周期の短い縞状パターン光を示す概略図であり、図15(d)は、図15(c)の縞状パターン光とその反射光との位相差の変化を示す概略図であり、図15(e)は、図15(b)の結果に基づいて図15(d)の位相差の変化について部分的に位相接続を行った概略図である。
【0046】
一般に、一つのパターン光源からの1種類の周期の縞状パターン光の場合には、位相差の変化がπから−πへと不連続となる箇所では、実際の高さの変化が連続であると仮定して位相接続を行っている。換言すれば、実際の高さの変化が連続である場合にしか確実な位相接続を行うことができない。
これに対して、本実施の形態5に係る高速三次元計測装置では、2つのパターン光源2a、2bから、2種類の異なる周期の縞状パターン光をそれぞれ照射するので、一方の縞状パターン光の反射光についての位相差の変化がπから−πへと不連続に変化する箇所について、もう一方の縞状パターン光の反射光の位相差変化を参照することで、位相接続を確実に行うことができる。
なお、位相接続の詳細については、例えば、非特許文献1などの文献に示されている。
【0047】
(変形例)
なお、実施の形態6の変形例として、第1のパターン光源2aから照射する光の色と、第2のパターン光源2bから照射する光の色をそれぞれ異なる色としてもよい。このようにそれぞれのパターン光源2a、2bから照射する光の色を異なる色に設定することで、2つのパターン光源2a、2bから同時に照射しても、被測定物からのそれぞれの反射光を色ごとに分離することで別々に観測できる。このため、2つのパターン光源2a、2bを順に照射する場合に比べて観測時間を減らすことができ、効率的に観測できる。
【0048】
(実施の形態7)
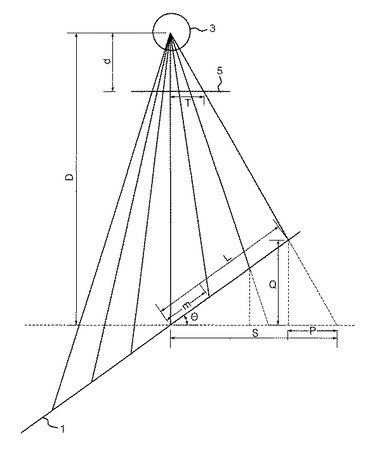
図16は、実施の形態7に係る高速三次元計測装置におけるパターン光源2と被測定物1との配置関係を示す概略図である。この高速三次元計測装置では、パターン光源2のレチクル5上に設けられた光透過量が周期的に変化するパターンの明暗の間隔を非等間隔とすることを特徴とする。具体的には、レチクル5上には、被測定物1上の光源3からの光軸と被測定物1上との交点からの距離(L)をパラメータとして表される下記の関係式、
T=d・L・cosθ/(D−L・sinθ) ・・・(1)
で規定される、レチクル5上の光軸との交点からの距離(T)で、一つの方向に沿って光透過量が変化するパターンが設けられている。ここで、θは、パターン光源2の光軸3に垂直な面と被測定物1の面とのなす角度である。また、Dは、パターン光源2の光源3から被測定物1までの距離である。さらに、dは、パターン光源2の光源3とレチクル5との距離である。これらの角度θ、距離D、距離dは定数である。このレチクル5上のパターンを介して被測定物1の上に光を照射することによって、被測定物1の上に照射された縞状パターン光の明暗の間隔を等間隔とすることができる。
【0049】
図17は、実施の形態7に係る高速三次元計測装置におけるパターン光源2のレチクル5上のパターンと被測定物1上の縞状パターンとの関係を示す概略図である。
なお、レチクル5上の帯の位置Tは、被測定物1上で等間隔となる場合、つまり、長さLを間隔mでn等分する場合(n・m=L)、レチクル5上でパターンを構成する明又は暗の位置は、光軸との交点に近い順に、(1)式により
d・m・cosθ/(D−m・sinθ)
2d・m・cosθ/(D−2m・sinθ)
3d・m・cosθ/(D−3m・sinθ)
4d・m・cosθ/(D−4m・sinθ)
・・・
となる。つまり、レチクル5上のパターンを構成する明暗は非等間隔で配置される。
【0050】
上記関係式の導出について説明する。
図17から相似関係に基づいて、以下の関係が順に導かれる。
まず、以下の相似関係から
D:Q=S:P ・・・(2)
が導かれる。一方、
P=S−L・cosθ ・・・(3)
Q=L・sinθ ・・・(4)
が導かれる。(3)式と(4)式を(2)式に代入すると
D:L・sinθ=S:(S−L・cosθ)
上式を変形すると以下のようになる。
S・L・sinθ=D(S−L・cosθ)
D・L・cosθ=D・S−S・L・sinθ
D・L・cosθ=S(D−L・sinθ)
S=D・L・cosθ/(D−L・sinθ)
が導かれる。
次に、S:D=T:d の相似関係から、
T=d・S/D=d・L・cosθ/(D−L・sinθ)
が導かれる。
なお、この実施の形態7において、実施の形態1の構成に加えて、実施の形態2から6の少なくとも一つの構成を同時に用いてもよい。
【0051】
(実施の形態8)
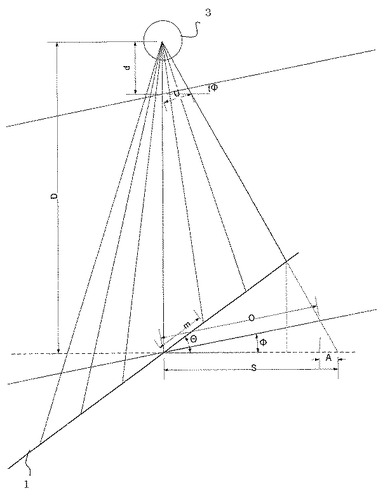
図18は、実施の形態8に係る高速三次元計測装置におけるパターン光源2のレチクル5上のパターンと被測定物1上の縞状パターンとの関係を示す概略図である。この高速三次元計測装置では、実施の形態7に係る高速三次元計測装置と比較すると、レチクル5の面が光源3の光軸に垂直な面から傾斜させている点で相違する。また、この高速三次元計測装置では、実施の形態2に係る高速三次元計測装置と同様に、レンズ4の光軸に垂直な面と、レチクル5の面と、被測定物1の面とが一つの線で交差するようにレチクル5の光軸を傾けて配置する。上記の配置の条件は「シャインプルーフの原理」と呼ばれるものであり、この条件を満たす場合には、レチクル5のパターンに対応して、被測定物1の上に照射される縞状パターンの手前と奥とで同時に焦点を合わせることができる。これによって、被測定物1の上に等間隔に縞状パターン光を照射すると共に、手前と奥とで同時に焦点を合わせることができる。
【0052】
この場合、レチクル5上のパターンを構成する明又は暗の位置Uは、実施の形態7とは異なる関係式で規定される。具体的には、光源3からの光軸と被測定物1上の交点から被測定物1上での距離(L)をパラメータとして表される下記の関係式、
U=d・L・cosθ/(D・cosφ+L・sin(φ−θ))・・・(5)
で規定される、レチクル5上の光軸との交点からの距離(U)で、一つの方向に沿って光透過量が変化するパターンが設けられている。ここで、θは、パターン光源2の光源3の光軸に垂直な面と被測定物1の面とのなす角度である。φは、パターン光源2の光源3の光軸に垂直な面とレチクル5の面とのなす角度である。また、Dは、パターン光源の光源3から被測定物1までの距離である。さらに、dは、パターン光源2の光源3とレチクル5との距離である。これらの角度θ、距離D、距離dは定数である。このレチクル5上のパターンを介して被測定物1の上に光を照射することによって、被測定物1の上に照射される縞状パターン光の明暗の間隔を等間隔とすることができる。
【0053】
上記関係式の導出について説明する。
図18から相似関係に基づいて、以下の関係が順に導かれる。
まず、
S=O・cosφ+A ・・・(6)
の関係と、
O・sinφ:D=A:S ・・・(7)
の相似関係に基づいて、
O・sinφ:D=(S−O・cosφ):S
S・O・sinφ=D(S−O・cosφ)
S・O・sinφ=D・S−D・O・cosφ
O(S・sinφ+D・cosφ)=D・S
O=D・S/(S・sinφ+D・cosφ)
が導かれる。
次いで、d:D=U:Oの関係から、
D・U=d・O
D・U=d・D・S/(Ssinφ+D・cosφ)
U=d・S/(S・sinφ+D・cosφ)
また、実施の形態7から、
S=D・L・cosθ/(D−L・sinθ)
であるので、
U=d(D・L・cosθ/(D−L・sinθ))/((D・L・cosθ/(D−L・sinθ))・sinφ+Dcosφ)
U=d・D・L・cosθ/(D・L・cosθ・sinφ+D・cosφ・(D−L・sinθ))
U=d・L・cosθ/(D・cosφ+L・(sinφcosθ−cosφsinθ))
U=d・L・cosθ/(D・cosφ+L・sin(φ−θ))
が導かれる。
なお、φ=0の場合には、実施の形態7の関係式と同じとなる。
なお、この実施の形態8において、実施の形態1の構成に加えて、実施の形態2から6の少なくとも一つの構成を同時に用いてもよい。
【産業上の利用可能性】
【0054】
本発明に係る高速三次元計測装置は、被測定物を連続搬送している状態での形状計測に利用できる。また、シート状の実質的にエンドレスに延在する被測定物の検査に用いることもできる。たとえば、フィルムの表面状態を計測したり、電子基板上に半田印刷されたクリーム半田の高さを計測することができる。
【符号の説明】
【0055】
10 高速三次元計測装置
1 被測定物
2、2a、2b パターン光源
3 光源
4 レンズ
5 レチクル
6、6a、6b ラインカメラ
7 レンズ
8 ラインセンサ
9 計測部
11 CPU
12 メモリ
13 記憶装置
14 インタフェース
15 入力部
16 出力部
【技術分野】
【0001】
本発明は、物体の形状を非接触で計測する高速三次元計測装置及び高速三次元計測方法に関する。
【背景技術】
【0002】
従来、位相シフト法による3次元計測では、被測定物を固定(静止)した状態に保ち、その被測定物の全体にわたって、位相シフトさせながら縞状パターンを投影して、エリアセンサカメラで被測定物全体による格子画像を撮影していた。これによって、被測定物全体の各箇所における、投影した縞状パターンと、撮影した格子画像との間の位相差を算出し、各箇所での位相差を高低差に変換して3次元計測していた。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】研究成果報告書「高精度高速形状変形計測法」和歌山大学システム工学部 光メカトロニクス学科 光波画像計測研究グループ、教授 森本吉春 他、2001年4月
【非特許文献2】研究成果報告書「位相信頼性評価値とDMDカメラを用いた三次元形状計測」和歌山大学システム工学部 李 志遠、2007年2月
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、従来の3次元計測装置では、一方向から測定物の全体を観測した場合には被測定物は、遠近による歪みが現れるため台形形状の画像となるという問題がある。また、その遠近による歪みは形状測定の精度にも影響を生じるという問題がある。
【0005】
さらに、被測定物の全体を同時に観測するため、被測定物を静止させて観測する必要があった。このため、長い物や連続的に移動する物は測定できなかった。
【0006】
そこで、本発明の目的は、被測定物の見かけの形状をできるだけ歪ませることなく形状計測できると共に、長い物や連続的に移動する物であっても形状計測できる高速三次元計測装置を提供することである。
【課題を解決するための手段】
【0007】
本発明に係る高速三次元計測装置は、被測定物の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するパターン光源と、
前記被測定物からの前記縞状パターン光の反射光を前記一つの方向に沿ったラインについて一組の光信号として取り込むラインカメラと、
取り込んだ一組の前記光信号について、前記縞状パターン光との関係に基づいて前記被測定物の高さを算出する計測部と、
を備えたことを特徴とする。
【0008】
また、前記パターン光源は、第1及び第2のパターン光源を有してもよい。
【0009】
さらに、前記第1のパターン光源は、第1の周期で光強度が変化する第1の縞状パターン光を照射し、前記第2のパターン光源は、第2の周期で光強度が変化する第2の縞状パターン光を照射してもよい。
この場合、前記計測部は、前記第1の縞状パターン光と、その反射光との間の第1の位相差と、前記第2の縞状パターン光と、その反射光との間の第2の位相差と、を用いて前記被測定物の連続的な高さの変化を算出することができる。
【0010】
またさらに、前記第1及び第2のパターン光源を交互に照射してもよい。
【0011】
また、前記第1のパターン光源は、第1の色で前記第1の縞状パターン光を照射し、前記第2のパターン光源は、第2の色で前記第2の縞状パターン光を照射すると共に、前記第1及び第2のパターン光源を同時に照射してもよい。
【0012】
さらに、前記パターン光源は、光源から、レンズと、光透過量が周期的に変化するパターンを設けたレチクルと、を介して光を照射して、前記被測定物の上に一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射してもよい。
【0013】
また、前記パターン光源は、前記レチクルの光軸を前記レンズの光軸から外して、前記レンズの光軸に垂直な面と、前記レチクルの面を含む平面と、前記被測定物の面と、が一つの線で交差するように配置してもよい。
【0014】
また、前記レチクルは、一つの方向に沿って光透過量が変化する周期が等間隔のパターンが設けられていてもよい。
【0015】
さらに、前記パターン光源の前記レチクルは、前記パターン光源の光軸に垂直な面と前記被測定物の面とのなす角度(θ)と、前記パターン光源の光源から光軸に沿った前記被測定物までの距離(D)と、前記パターン光源の光源と前記レチクルとの距離(d)とを定数とし、前記被測定物上の前記光源からの光軸との交点からの距離(L)をパラメータとして表される下記の関係式、
T=d・L・cosθ/(D−L・sinθ)
で規定される、前記レチクル上の前記光源からの光軸との交点からの距離(T)で、一つの方向に沿って光透過量が変化するパターンが設けられていてもよい。これによって、前記パターン光源から前記レチクルを介して光強度が一定周期で変化する縞状パターン光を前記被測定物の上に照射することができる。
【0016】
またさらに、前記パターン光源の前記レチクルは、前記パターン光源の光軸に垂直な面と前記被測定物の面とのなす角度(θ)と、前記パターン光源の光軸に垂直な面と前記レチクルの面とのなす角度(φ)と、前記パターン光源の光源から光軸に沿った前記被測定物までの距離(D)と、前記パターン光源の光源と前記レチクルとの距離(d)とを定数とし、前記被測定物上の前記光源からの光軸との交点からの距離(L)をパラメータとして表される下記の関係式、
U=d・L・cosθ/(D・cosφ+L・sin(φ−θ))
で規定される、前記レチクル上の前記光源からの光軸との交点からの距離(U)で、一つの方向に沿って光透過量が変化するパターンが設けられていてもよい。これによって、前記パターン光源は、前記レチクルを介して光強度が一定周期で変化する縞状パターン光を前記被測定物の上に照射することができる。
【0017】
また、前記パターン光源は、前記光源としてラインレーザを用いてもよい。
【0018】
またさらに、前記ラインカメラは、外部からの光を取り込むレンズの光軸を前記ラインセンサの光軸から外して、前記ラインセンサの光軸に垂直な面と、前記レンズの面を含む平面と、前記被測定物の面と、が一つの線で交差するように配置してもよい。
【0019】
また、前記計測部は、取り込んだ一組の前記光信号について、前記縞状パターン光の周期を用いた位相シフトモアレ法によって、一組の前記信号列から複数組の疑似信号列を生成し、得られた複数組の前記疑似信号列を用いて、前記被測定物の高さを算出してもよい。
【0020】
さらに、前記計測部は、取り込んだ一組の前記光信号について、フーリエ変換格子法を用いて、前記縞状パターン光の光強度と前記被測定物からの反射光の光強度との位相差を求め、高さを算出してもよい。
【0021】
また、本発明に係る高速三次元計測方法は、被測定物の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するステップと、
前記被測定物からの前記縞状パターン光の反射光を前記一つの方向に沿ったラインについて一組の光信号として取り込むステップと、
取り込んだ一組の前記光信号について、前記縞状パターン光との関係に基づいて前記被測定物の高さを算出するステップと、
を含むことを特徴とする。
【0022】
さらに、前記被測定物の高さを算出するステップでは、取り込んだ一組の前記光信号について、前記縞状パターン光の周期を用いた位相シフトモアレ法によって、一組の前記信号列から複数組の疑似信号列を生成し、得られた複数組の前記疑似信号列を用いて、前記被測定物の高さを算出してもよい。
【0023】
前記被測定物の高さを算出するステップでは、取り込んだ一組の前記光信号について、フーリエ変換格子法を用いて、前記縞状パターン光の光強度と前記被測定物からの反射光の光強度との位相差を求め、高さを算出してもよい。
【発明の効果】
【0024】
本発明の高速三次元計測装置及び高速三次元計測方法によれば、非測定物を連続搬送状態で形状計測することが可能である。また、シート状の実質的にエンドレスに延在する被測定物の検査も可能である。
【図面の簡単な説明】
【0025】
【図1】本発明の実施の形態1に係る高速三次元計測装置の構成を示すブロック図である。
【図2】パターン光源の内部構成を示す概略図である。
【図3】ラインカメラの内部構成を示す概略図である。
【図4】パターン光源を斜め上方に配置し、ラインカメラを真上に配置する構成を示す概略図である。
【図5】パターン光源を真上に配置して、ラインカメラを斜め上方に配置する構成を示す概略図である。
【図6】パターン光源及びラインカメラを互いに相対する斜め上方に配置する構成を示す概略図である。
【図7】実施の形態1に係る高速三次元計測方法のフローチャートである。
【図8】(a)〜(k)は、位相シフトモアレ法を説明する概略図である。
【図9】(a)〜(e)はフーリエ変換格子法による位相差の算出を説明する概略図である。
【図10】実施の形態2に係る高速三次元計測装置におけるパターン光源と被測定物との配置関係を示す概略図である。
【図11】実施の形態3に係る高速三次元計測装置におけるラインカメラと被測定物との配置関係を示す概略図である。
【図12】実施の形態4に係る高速三次元計測装置の構成を示す概略図である。
【図13】実施の形態5に係る高速三次元計測装置の構成を示す概略図である。
【図14】(a)及び(b)は、実施の形態6に係る高速三次元計測装置の構成を示す概略図である。
【図15】(a)は、実施の形態6に係る高速三次元計測装置におけるパターン光源2bによる周期の長い縞状パターン光を示す概略図であり、(b)は、(a)の縞状パターン光とその反射光との位相差の変化を示す概略図であり、(c)は、パターン光源2aによる周期の短い縞状パターン光を示す概略図であり、(d)は、(c)の縞状パターン光とその反射光との位相差の変化を示す概略図であり、(e)は、(b)の結果に基づいて(d)の位相差の変化について部分的に位相接続を行った概略図である。
【図16】実施の形態7に係る高速三次元計測装置におけるパターン光源と被測定物との配置関係を示す概略図である。
【図17】実施の形態7に係る高速三次元計測装置におけるパターン光源のレチクル上のパターンと被測定物上の縞状パターンとの関係を示す概略図である。
【図18】実施の形態8に係る高速三次元計測装置におけるパターン光源のレチクル上のパターンと被測定物上の縞状パターンとの関係を示す概略図である。
【発明を実施するための形態】
【0026】
本発明の実施の形態に係る高速三次元計測装置及び高速三次元計測方法について添付図面を用いて説明する。なお、図面において実質的に同一の部材には同一の符号を付している。
【0027】
(実施の形態1)
図1は、本発明の実施の形態1に係る高速三次元計測装置の構成を示すブロック図である。この高速三次元計測装置10は、パターン光源2と、ラインカメラ6と、計測部9と、を備える。図1では、パターン光源2は被測定物1の斜め上方に配置され、ラインカメラ4は被測定物1の真上に配置されている。パターン光源2は、斜め上方から、被測定物1の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射する。ラインカメラ6は、被測定物1からの縞状パターン光の反射光を上記一つの方向に沿ったラインについて一組の光信号として取り込む。計測部9は、取り込んだ一組の光信号について、縞状パターン光との関係に基づいて被測定物1の高さ(形状)を算出する。
【0028】
<パターン光源>
図2は、パターン光源2の内部構成を示す概略図である。パターン光源2は、光源3と、レンズ4と、光透過量が周期的に変化するレチクル5とを備える。このパターン光源2によって、光源3から、レンズ4とレチクル5とを介して光を照射する。これによって、被測定物1の上に一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射することができる。
【0029】
<ラインカメラ>
図3は、ラインカメラ6の内部構成を示す概略図である。ラインカメラ6は、被測定物1からの反射光を、レンズ7を介して一つの方向に沿ったラインについて、ラインセンサ8で一組の光信号として取り込む。
【0030】
<パターン光源とラインカメラとの位置関係>
パターン光源2とラインカメラ6とは、それぞれ被測定物1に対して真上、又は、斜め上方のいずれかの配置とすることができる。そのためパターン光源2とラインカメラ6との位置関係としては、様々な配置をとりうる。例えば、図4から図6のいずれの配置であってもよい。図4では、図1と同様にパターン光源2を斜め上方に配置して、被測定物1の上に縞状パターン光を照射している。また、ラインカメラ6を真上に配置している。図5では、図4とは逆に、パターン光源2を真上に配置して、被測定物1の上に縞状パターン光を照射し、ラインカメラ6を斜め上方に配置している。図6では、パターン光源2及びラインカメラ6を互いに相対する斜め上方に配置している。なお、パターン光源2とラインカメラ6との配置は、図4から図6の場合に限られない。
【0031】
<計測部>
計測部9は、取り込んだ一組の光信号について、縞状パターン光と反射光との位相差に基づいて被測定物1の高さ(形状)を算出する。計測部9としては、例えば、コンピュータで構成されていてもよい。計測部がコンピュータで構成される場合には、CPU11、メモリ12、記憶装置13、インタフェース14、入力装置15、出力装置16等を備える。
【0032】
<高速三次元計測方法>
図7は、実施の形態1に係る高速三次元計測方法のフローチャートである。
a)被測定物1の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するステップ(S01)と、
b)被測定物1からの縞状パターン光の反射光を一つの方向に沿ったラインについて一組の光信号として取り込むステップ(S02)と、
c)取り込んだ一組の光信号について、縞状パターン光との関係に基づいて被測定物1の高さを算出するステップ(S03)と、
を含む。
【0033】
上記の被測定物1の高さを算出するステップ(S03)では、例えば、
(1)位相シフトモアレ法
(2)フーリエ変換格子法
のいずれかについても用いることができる。なお、被測定物1の高さを算出するステップは、上記の2つの方法に限られない。
以下に、それぞれの方法について説明する。
【0034】
(1)位相シフトモアレ法
取り込んだ一組の光信号について、縞状パターン光の周期を用いた位相シフトモアレ法によって、一組の信号列から複数組の疑似信号列を生成する。次いで、得られた複数組の疑似信号列を用いて、照射した縞状パターン光と被測定物1からの反射光との位相差を求め、位相差に基づいて被測定物1の高さを算出する。
【0035】
位相シフトモアレ法では、取り込んだ一組の光信号について、作成する疑似信号列の組数に対応する画素数ごとにサンプリングして、とびとびの画素値を有する疑似信号列を作成し、サンプリングする画素をずらせて同様のサンプリングを行って、1組の信号列から複数組の疑似信号列を生成する。
【0036】
図8(a)〜(k)は、位相シフトモアレ法を説明する概略図である。図8(a)の黒点は、ラインセンサのサンプリング点(画素)を示すものである。図8(b)は、パターン光源2から照射される明暗の帯が1ラインにわたって交互に繰り返された縞状パターン光のイメージを示すものである。図8(c)は、図8(b)の縞状パターン光の反射光の1ラインを取り込んだ光信号を示すものである。図8(d)は、図8(c)の信号列で、端から一つめの画素から4画素おきに間引いた疑似信号列を示すものである。この場合、4画素おきにしかデータがない。図8(e)は、図8(c)の信号列で、端から二つめの画素から4画素おきに間引いた疑似信号列を示すものである。図8(f)は、図8(c)の信号列で、端から三つめの画素から4画素おきに間引いた疑似信号列を示すものである。図8(g)は、図8(c)の信号列で、端から四つめの画素から4画素おきに間引いた疑似信号列を示すものである。図8(h)は、図8(d)の疑似信号列について、データが存在する画素に基づいて、その間のデータが存在しない画素に対して補間演算を行ってデータを生成した疑似信号列を示すものである。ただし、図8(h)では間のデータは左信号と同一となっているが、補間演算によって信号の強弱は変化する。図8(i)は、図8(e)の疑似信号列について、データが存在する画素に基づいて、その間のデータが存在しない画素に対して補間演算を行ってデータを生成した疑似信号列を示すものである。ただし、図8(i)では間のデータは左信号と同一となっているが、補間演算によって信号の強弱は変化する。図8(j)は、図8(f)の疑似信号列について、データが存在する画素に基づいて、その間のデータが存在しない画素に対して補間演算を行ってデータを生成した疑似信号列を示すものである。ただし、図8(j)では間のデータは左信号と同一となっているが、補間演算によって信号の強弱は変化する。図8(k)は、図8(g)の疑似信号列について、データが存在する画素に基づいて、その間のデータが存在しない画素に対して補間演算を行ってデータを生成した疑似信号列を示すものである。ただし、図8(j)では間のデータは左信号と同一となっているが、補間演算によって信号の強弱は変化する。
【0037】
以下に位相シフトモアレ法の手順を説明する。
(ア)パターン光源2から照射される明暗の帯が1ラインにわたって交互に繰り返された縞状パターン光(図8(b))の反射光の1ラインを取り込んで、図8(c)で示される一組の光信号列を得る。
(イ)図8(c)の光信号列について、作成しようとする疑似信号列が4組の場合には、照射する縞状パターン光(図8(b))の周期に合わせて4画素おきに間引いてサンプリングする。この場合、図8(c)のラインに沿って4画素ごとにサンプリングを行って、図8(d)〜(g)の4画素ごとにとびとびのデータを有する4組の疑似信号列を得る。
(ウ)各組の疑似信号列について、データが存在する画素に基づいて、その間のデータが存在しない画素に対して補間演算を行ってデータを生成した4組の疑似信号列(図8(h)〜図8(k))を得る。
【0038】
上記位相シフトモアレ法で得られた複数組の疑似信号列を用いて、照射した縞状パターン光と被測定物1からの反射光との位相差を求め、位相差に基づいて被測定物1の高さを算出する。例えば、上記の例では4組の疑似信号列は、照射する縞状パターン光の周期が4画素であるのに対して、1画素ずつずらしてサンプリングしており、π/2ごと位相シフトさせた場合に対応する。そこで、このπ/2ごと位相シフトさせた4組の疑似信号列に基づいて、各画素ごとの位相差を求め、この位相差に基づいて高さを算出することができる。これにより、被測定物1を形状計測することができる。具体的には、上記4組の疑似信号列について、各画素ごとについて、0、π/2、π、3π/2の各位相での画素値をプロットして得られる画素値の余弦曲線から各画素での位相差を得ることができる。
今回は、4画素おきに間引いてサンプリングを行い、位相差を求めたが、3画素おき以上で間引いたサンプリングであれば、位相差を計算することができる。
なお、位相シフトモアレ法の詳細については、例えば、非特許文献1や非特許文献2などの文献に示されている。
【0039】
(2)フーリエ変換格子法
フーリエ変換格子法では、取り込んだ一組の光信号について、反射光についてフーリエ変換を行った後、その1次高調波のみを逆フーリエ変換して、位相差を求め、位相差に基づいて高さを算出する。図9(a)〜(e)はフーリエ変換格子法による位相差の算出を説明する概略図である。
(ア)平面に縞状パターン光を投影した場合、図9(a)のようになり、この反射光をフーリエ変換すると、図9(b)のように縞状パターン光の周期に対応する箇所(ω1、−ω1)の2箇所に鋭いピークを生じる。
(イ)一方、凹凸面に縞状パターン光を投影した場合、凹凸部分で縞の位置が位相ω1からずれて、図9(c)のようになる。この反射光をフーリエ変換すると、図9(d)に示すように、縞のずれの位相ω2、ω3の対応する成分を示す。
(ウ)(イ)について、フーリエ変換後の1次調和波の付近について逆フーリエ変換を行って、縞のずれの位相ω2、ω3等の成分を求めることができる。ここで、2次高調波以上の高調波はノイズによるものであるので逆フーリエを行う必要はない。また、位相ωの正負の成分は波の進行方向を表している(図9(e))。上記の場合には静止画なので、方向性がないため、正の成分(ω)のみを逆フーリエ変換すればよい。
なお、逆フーリエ変換は、
I(x、y)=C1exp(jω(x、y))
と表すことができる。この式から複素解析的に位相ωを求める事ができる。各画素ごとに得られたω(x、y)は1ラインについての位相画像となる。
得られた位相差に基づいて各画素の位置の高さを求めることができる。
なお、フーリエ変換格子法の詳細については、例えば、非特許文献1などの文献に示されている。
【0040】
(実施の形態2)
図10は、実施の形態2に係る高速三次元計測装置におけるパターン光源2と被測定物との配置関係を示す概略図である。この高速三次元計測装置では、実施の形態1に係る高速三次元計測装置と比較すると、光源3の光軸に対して、レチクル5の光軸を傾けて配置していることを特徴とする。さらに具体的には、レンズ4の光軸に垂直な面と、レチクル5の面と、被測定物1の面とが一つの線で交差するようにレチクル5の光軸を傾けて配置する。上記の配置の条件は「シャインプルーフの原理」と呼ばれるものであり、この条件を満たす場合には、レチクル5のパターンに対応して、被測定物1の上に照射される縞状パターンの手前と奥とで同時に焦点を合わせることができる。
【0041】
(実施の形態3)
図11は、実施の形態3に係る高速三次元計測装置におけるラインカメラ6と被測定物1との配置関係を示す概略図である。この高速三次元計測装置では、実施の形態1に係る高速三次元計測装置と比較すると、ラインカメラ6自体の光軸に対して、レンズ7の光軸を傾けて配置していることを特徴とする。さらに具体的には、図11に示されるように、ラインセンサ8の光軸に垂直な面と、レンズ7の面を含む平面と、被測定物1の面と、が一つの線で交差するように配置される。これはパターン光源2のレチクル5の配置と同様に「シャインプルーフの原理」と呼ばれるものであり、上記条件を満たす場合には、ラインセンサ8への光信号の取り込みにおいて被測定物の手前と奥との両方について焦点を合わせることができる。
なお、実施の形態3において、実施の形態1の構成に加えて、実施の形態2のパターン光源の構成を同時に用いてもよい。
【0042】
(実施の形態4)
図12は、実施の形態4に係る高速三次元計測装置の構成を示す概略図である。この高速三次元計測装置では、複数のパターン光源2a、2bを用いて、それぞれ互いに異なる方向から光を照射することを特徴とする。これによって、一方のパターン光源からだけでは影となって高さを計測できない死角となる部分に対して、もう一つのパターン光源から光を照射できるので被測定物上での死角部分を減らすことができる。この実施の形態では、2つの光源を用いたが、より多くの光源を用いて計測することもできる。
なお、この実施の形態4においても、実施の形態1の構成に加えて、実施の形態2のラインカメラ、及び/又は、実施の形態3のパターン光源の構成を同時に用いてもよい。
【0043】
(実施の形態5)
図13は、実施の形態5に係る高速三次元計測装置の構成を示す概略図である。この高速三次元計測装置では、複数のラインカメラを使用している。従来、一つのラインカメラを用いた場合には、カメラ位置と被測定物の形状との関係で一つのラインカメラでは観測できない部分、つまり死角部分が生じる場合があった。この高速三次元計測装置では、2台のラインカメラを用いて観測できるので、一方のラインカメラの死角部分を他方のラインカメラでカバーできるので、全体として死角部分を減らすことができる。この実施の形態では、2つのラインカメラを用いたが、より多くのラインカメラを用いて計測することもできる。
なお、この実施の形態5においても、実施の形態1の構成に加えて、実施の形態2から4の少なくとも一つの構成を同時に用いてもよい。
【0044】
(実施の形態6)
図14(a)及び(b)は、実施の形態6に係る高速三次元計測装置の構成を示す概略図である。この高速三次元計測装置では、実施の形態4と比較すると、複数のパターン光源を用いる点で同様であるが、さらにそれぞれのパターン光源2a、2bから照射する縞状パターン光の周期を互いに異なるものとする点で相違する。2つのパターン光源2a、2bから照射する縞状パターン光の周期を互いに異なるものとすることによって、それぞれのパターン光源からの光の反射光から算出される位相差に対応する周期(長さ方向での周期)が異なる。例えば、図15(a)では、図15(c)の場合に対して、長さ方向で2倍の周期で位相が変化する。そのため、位相差πから−πへの不連続変化となる箇所がそれぞれの反射光で異なるので、それぞれの反射光による位相差の変化を参照することによって、周囲の画素値を考慮することなく位相接続を確実に行うことができる。
尚、この実施の形態では、2つのパターン光源を用いたが、より多くのパターン光源を用いて実施することもできる。また、この実施の形態6ではパターン光源が被測定物1の真上にあるが、斜めからの照射でもかまわない。この際、実施の形態2で説明されたパターン光源を用いることができる。
なお、この実施の形態6においても、実施の形態1の構成に加えて、実施の形態2から5の少なくとも一つの構成を同時に用いてもよい。
【0045】
図15(a)は、パターン光源2bによる周期の長い縞状パターン光を示す概略図であり、図15(b)は、図15(a)の縞状パターン光とその反射光との位相差の変化を示す概略図であり、図15(c)は、パターン光源2aによる周期の短い縞状パターン光を示す概略図であり、図15(d)は、図15(c)の縞状パターン光とその反射光との位相差の変化を示す概略図であり、図15(e)は、図15(b)の結果に基づいて図15(d)の位相差の変化について部分的に位相接続を行った概略図である。
【0046】
一般に、一つのパターン光源からの1種類の周期の縞状パターン光の場合には、位相差の変化がπから−πへと不連続となる箇所では、実際の高さの変化が連続であると仮定して位相接続を行っている。換言すれば、実際の高さの変化が連続である場合にしか確実な位相接続を行うことができない。
これに対して、本実施の形態5に係る高速三次元計測装置では、2つのパターン光源2a、2bから、2種類の異なる周期の縞状パターン光をそれぞれ照射するので、一方の縞状パターン光の反射光についての位相差の変化がπから−πへと不連続に変化する箇所について、もう一方の縞状パターン光の反射光の位相差変化を参照することで、位相接続を確実に行うことができる。
なお、位相接続の詳細については、例えば、非特許文献1などの文献に示されている。
【0047】
(変形例)
なお、実施の形態6の変形例として、第1のパターン光源2aから照射する光の色と、第2のパターン光源2bから照射する光の色をそれぞれ異なる色としてもよい。このようにそれぞれのパターン光源2a、2bから照射する光の色を異なる色に設定することで、2つのパターン光源2a、2bから同時に照射しても、被測定物からのそれぞれの反射光を色ごとに分離することで別々に観測できる。このため、2つのパターン光源2a、2bを順に照射する場合に比べて観測時間を減らすことができ、効率的に観測できる。
【0048】
(実施の形態7)
図16は、実施の形態7に係る高速三次元計測装置におけるパターン光源2と被測定物1との配置関係を示す概略図である。この高速三次元計測装置では、パターン光源2のレチクル5上に設けられた光透過量が周期的に変化するパターンの明暗の間隔を非等間隔とすることを特徴とする。具体的には、レチクル5上には、被測定物1上の光源3からの光軸と被測定物1上との交点からの距離(L)をパラメータとして表される下記の関係式、
T=d・L・cosθ/(D−L・sinθ) ・・・(1)
で規定される、レチクル5上の光軸との交点からの距離(T)で、一つの方向に沿って光透過量が変化するパターンが設けられている。ここで、θは、パターン光源2の光軸3に垂直な面と被測定物1の面とのなす角度である。また、Dは、パターン光源2の光源3から被測定物1までの距離である。さらに、dは、パターン光源2の光源3とレチクル5との距離である。これらの角度θ、距離D、距離dは定数である。このレチクル5上のパターンを介して被測定物1の上に光を照射することによって、被測定物1の上に照射された縞状パターン光の明暗の間隔を等間隔とすることができる。
【0049】
図17は、実施の形態7に係る高速三次元計測装置におけるパターン光源2のレチクル5上のパターンと被測定物1上の縞状パターンとの関係を示す概略図である。
なお、レチクル5上の帯の位置Tは、被測定物1上で等間隔となる場合、つまり、長さLを間隔mでn等分する場合(n・m=L)、レチクル5上でパターンを構成する明又は暗の位置は、光軸との交点に近い順に、(1)式により
d・m・cosθ/(D−m・sinθ)
2d・m・cosθ/(D−2m・sinθ)
3d・m・cosθ/(D−3m・sinθ)
4d・m・cosθ/(D−4m・sinθ)
・・・
となる。つまり、レチクル5上のパターンを構成する明暗は非等間隔で配置される。
【0050】
上記関係式の導出について説明する。
図17から相似関係に基づいて、以下の関係が順に導かれる。
まず、以下の相似関係から
D:Q=S:P ・・・(2)
が導かれる。一方、
P=S−L・cosθ ・・・(3)
Q=L・sinθ ・・・(4)
が導かれる。(3)式と(4)式を(2)式に代入すると
D:L・sinθ=S:(S−L・cosθ)
上式を変形すると以下のようになる。
S・L・sinθ=D(S−L・cosθ)
D・L・cosθ=D・S−S・L・sinθ
D・L・cosθ=S(D−L・sinθ)
S=D・L・cosθ/(D−L・sinθ)
が導かれる。
次に、S:D=T:d の相似関係から、
T=d・S/D=d・L・cosθ/(D−L・sinθ)
が導かれる。
なお、この実施の形態7において、実施の形態1の構成に加えて、実施の形態2から6の少なくとも一つの構成を同時に用いてもよい。
【0051】
(実施の形態8)
図18は、実施の形態8に係る高速三次元計測装置におけるパターン光源2のレチクル5上のパターンと被測定物1上の縞状パターンとの関係を示す概略図である。この高速三次元計測装置では、実施の形態7に係る高速三次元計測装置と比較すると、レチクル5の面が光源3の光軸に垂直な面から傾斜させている点で相違する。また、この高速三次元計測装置では、実施の形態2に係る高速三次元計測装置と同様に、レンズ4の光軸に垂直な面と、レチクル5の面と、被測定物1の面とが一つの線で交差するようにレチクル5の光軸を傾けて配置する。上記の配置の条件は「シャインプルーフの原理」と呼ばれるものであり、この条件を満たす場合には、レチクル5のパターンに対応して、被測定物1の上に照射される縞状パターンの手前と奥とで同時に焦点を合わせることができる。これによって、被測定物1の上に等間隔に縞状パターン光を照射すると共に、手前と奥とで同時に焦点を合わせることができる。
【0052】
この場合、レチクル5上のパターンを構成する明又は暗の位置Uは、実施の形態7とは異なる関係式で規定される。具体的には、光源3からの光軸と被測定物1上の交点から被測定物1上での距離(L)をパラメータとして表される下記の関係式、
U=d・L・cosθ/(D・cosφ+L・sin(φ−θ))・・・(5)
で規定される、レチクル5上の光軸との交点からの距離(U)で、一つの方向に沿って光透過量が変化するパターンが設けられている。ここで、θは、パターン光源2の光源3の光軸に垂直な面と被測定物1の面とのなす角度である。φは、パターン光源2の光源3の光軸に垂直な面とレチクル5の面とのなす角度である。また、Dは、パターン光源の光源3から被測定物1までの距離である。さらに、dは、パターン光源2の光源3とレチクル5との距離である。これらの角度θ、距離D、距離dは定数である。このレチクル5上のパターンを介して被測定物1の上に光を照射することによって、被測定物1の上に照射される縞状パターン光の明暗の間隔を等間隔とすることができる。
【0053】
上記関係式の導出について説明する。
図18から相似関係に基づいて、以下の関係が順に導かれる。
まず、
S=O・cosφ+A ・・・(6)
の関係と、
O・sinφ:D=A:S ・・・(7)
の相似関係に基づいて、
O・sinφ:D=(S−O・cosφ):S
S・O・sinφ=D(S−O・cosφ)
S・O・sinφ=D・S−D・O・cosφ
O(S・sinφ+D・cosφ)=D・S
O=D・S/(S・sinφ+D・cosφ)
が導かれる。
次いで、d:D=U:Oの関係から、
D・U=d・O
D・U=d・D・S/(Ssinφ+D・cosφ)
U=d・S/(S・sinφ+D・cosφ)
また、実施の形態7から、
S=D・L・cosθ/(D−L・sinθ)
であるので、
U=d(D・L・cosθ/(D−L・sinθ))/((D・L・cosθ/(D−L・sinθ))・sinφ+Dcosφ)
U=d・D・L・cosθ/(D・L・cosθ・sinφ+D・cosφ・(D−L・sinθ))
U=d・L・cosθ/(D・cosφ+L・(sinφcosθ−cosφsinθ))
U=d・L・cosθ/(D・cosφ+L・sin(φ−θ))
が導かれる。
なお、φ=0の場合には、実施の形態7の関係式と同じとなる。
なお、この実施の形態8において、実施の形態1の構成に加えて、実施の形態2から6の少なくとも一つの構成を同時に用いてもよい。
【産業上の利用可能性】
【0054】
本発明に係る高速三次元計測装置は、被測定物を連続搬送している状態での形状計測に利用できる。また、シート状の実質的にエンドレスに延在する被測定物の検査に用いることもできる。たとえば、フィルムの表面状態を計測したり、電子基板上に半田印刷されたクリーム半田の高さを計測することができる。
【符号の説明】
【0055】
10 高速三次元計測装置
1 被測定物
2、2a、2b パターン光源
3 光源
4 レンズ
5 レチクル
6、6a、6b ラインカメラ
7 レンズ
8 ラインセンサ
9 計測部
11 CPU
12 メモリ
13 記憶装置
14 インタフェース
15 入力部
16 出力部
【特許請求の範囲】
【請求項1】
被測定物の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するパターン光源と、
前記被測定物からの前記縞状パターン光の反射光を前記一つの方向に沿ったラインについて一組の光信号として取り込むラインカメラと、
取り込んだ一組の前記光信号について、前記縞状パターン光との関係に基づいて前記被測定物の高さを算出する計測部と、
を備えた高速三次元計測装置。
【請求項2】
前記パターン光源は、第1及び第2のパターン光源を有する、請求項1に
記載の高速三次元計測装置。
【請求項3】
前記第1のパターン光源は、第1の周期で光強度が変化する第1の縞状パターン光を照射し、前記第2のパターン光源は、第2の周期で光強度が変化する第2の縞状パターン光を照射し、
前記計測部は、前記第1の縞状パターン光と、その反射光との間の第1の位相差と、前記第2の縞状パターン光と、その反射光との間の第2の位相差と、を用いて前記被測定物の連続的な高さを算出する、請求項2に記載の高速三次元計測装置。
【請求項4】
前記第1及び第2のパターン光源を交互に照射する、請求項2又は3に記載の高速三次元計測装置。
【請求項5】
前記第1のパターン光源は、第1の色で前記第1の縞状パターン光を照射し、前記第2のパターン光源は、第2の色で前記第2の縞状パターン光を照射し、
前記第1及び第2のパターン光源を同時に照射する、請求項2又は3に記載の高速三次元計測装置。
【請求項6】
前記パターン光源は、光源から、レンズと、光透過量が周期的に変化するパターンを設けたレチクルと、を介して光を照射して、前記被測定物の上に一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射する、請求項1から5のいずれか一項に記載の高速三次元計測装置。
【請求項7】
前記パターン光源は、前記レチクルの光軸を前記レンズの光軸から外して、前記レンズの光軸に垂直な面と、前記レチクルの面を含む平面と、前記被測定物の面と、が一つの線で交差するように配置される、請求項6に記載の高速三次元計測装置。
【請求項8】
前記レチクルは、一つの方向に沿って光透過量が変化する周期が等間隔のパターンが設けられている、請求項6又は7に記載の高速三次元計測装置。
【請求項9】
前記レチクルは、前記パターン光源の光軸に垂直な面と前記被測定物の面とのなす角度(θ)と、前記パターン光源の光源から光軸に沿った前記被測定物までの距離(D)と、前記パターン光源の光源と前記レチクルとの距離(d)とを定数とし、前記被測定物上の前記光源からの光軸との交点からの距離(L)をパラメータとして表される下記の関係式、
T=d・L・cosθ/(D−L・sinθ)
で規定される、前記レチクル上の前記光源からの光軸との交点からの距離(T)で、一つの方向に沿って光透過量が変化するパターンが設けられており、
前記パターン光源は、前記レチクルを介して光強度が一定周期で変化する縞状パターン光を前記被測定物の上に照射する、請求項6又は7に記載の高速三次元計測装置。
【請求項10】
前記レチクルは、前記パターン光源の光軸に垂直な面と前記被測定物の面とのなす角度(θ)と、前記パターン光源の光軸に垂直な面と前記レチクルの面とのなす角度(φ)と、前記パターン光源の光源から光軸に沿った前記被測定物までの距離(D)と、前記パターン光源の光源と前記レチクルとの距離(d)とを定数とし、前記被測定物上の前記光源からの光軸との交点からの距離(L)をパラメータとして表される下記の関係式、
U=d・L・cosθ/(D・cosφ+L・sin(φ−θ))
で規定される、前記レチクル上の前記光源からの光軸との交点からの距離(U)で、一つの方向に沿って光透過量が変化するパターンが設けられており、
前記パターン光源は、前記レチクルを介して光強度が一定周期で変化する縞状パターン光を前記被測定物の上に照射する、請求項7に記載の高速三次元計測装置。
【請求項11】
前記パターン光源は、前記光源としてラインレーザを用いる、請求項6から10のいずれか一項に記載の高速三次元計測装置。
【請求項12】
前記ラインカメラは、外部からの光を取り込むレンズの光軸を前記ラインセンサの光軸から外して、前記ラインセンサの光軸に垂直な面と、前記レンズの面を含む平面と、前記被測定物の面と、が一つの線で交差するように配置される、請求項1から11のいずれか一項に記載の高速三次元計測装置。
【請求項13】
前記計測部は、取り込んだ一組の前記光信号について、前記縞状パターン光の周期を用いた位相シフトモアレ法によって、一組の前記信号列から複数組の疑似信号列を生成し、得られた複数組の前記疑似信号列を用いて、前記被測定物の高さを算出する、請求項1から12のいずれか一項に記載の高速三次元計測装置。
【請求項14】
前記計測部は、取り込んだ一組の前記光信号について、フーリエ変換格子法を用いて、前記縞状パターン光の光強度と前記被測定物からの反射光の光強度との位相差を求め、高さを算出する、請求項1から12のいずれか一項に記載の高速三次元計測装置。
【請求項15】
被測定物の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するステップと、
前記被測定物からの前記縞状パターン光の反射光を前記一つの方向に沿ったラインについて一組の光信号として取り込むステップと、
取り込んだ一組の前記光信号について、前記縞状パターン光との関係に基づいて前記被測定物の高さを算出するステップと、
を含む高速三次元計測方法。
【請求項16】
前記被測定物の高さを算出するステップでは、取り込んだ一組の前記光信号について、前記縞状パターン光の周期を用いた位相シフトモアレ法によって、一組の前記信号列から複数組の疑似信号列を生成し、得られた複数組の前記疑似信号列を用いて、前記被測定物の高さを算出する、請求項15に記載の高速三次元計測方法。
【請求項17】
前記被測定物の高さを算出するステップでは、取り込んだ一組の前記光信号について、フーリエ変換格子法を用いて、前記縞状パターン光の光強度と前記被測定物からの反射光の光強度との位相差を求め、高さを算出する、請求項15に記載の高速三次元計測方法。
【請求項1】
被測定物の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するパターン光源と、
前記被測定物からの前記縞状パターン光の反射光を前記一つの方向に沿ったラインについて一組の光信号として取り込むラインカメラと、
取り込んだ一組の前記光信号について、前記縞状パターン光との関係に基づいて前記被測定物の高さを算出する計測部と、
を備えた高速三次元計測装置。
【請求項2】
前記パターン光源は、第1及び第2のパターン光源を有する、請求項1に
記載の高速三次元計測装置。
【請求項3】
前記第1のパターン光源は、第1の周期で光強度が変化する第1の縞状パターン光を照射し、前記第2のパターン光源は、第2の周期で光強度が変化する第2の縞状パターン光を照射し、
前記計測部は、前記第1の縞状パターン光と、その反射光との間の第1の位相差と、前記第2の縞状パターン光と、その反射光との間の第2の位相差と、を用いて前記被測定物の連続的な高さを算出する、請求項2に記載の高速三次元計測装置。
【請求項4】
前記第1及び第2のパターン光源を交互に照射する、請求項2又は3に記載の高速三次元計測装置。
【請求項5】
前記第1のパターン光源は、第1の色で前記第1の縞状パターン光を照射し、前記第2のパターン光源は、第2の色で前記第2の縞状パターン光を照射し、
前記第1及び第2のパターン光源を同時に照射する、請求項2又は3に記載の高速三次元計測装置。
【請求項6】
前記パターン光源は、光源から、レンズと、光透過量が周期的に変化するパターンを設けたレチクルと、を介して光を照射して、前記被測定物の上に一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射する、請求項1から5のいずれか一項に記載の高速三次元計測装置。
【請求項7】
前記パターン光源は、前記レチクルの光軸を前記レンズの光軸から外して、前記レンズの光軸に垂直な面と、前記レチクルの面を含む平面と、前記被測定物の面と、が一つの線で交差するように配置される、請求項6に記載の高速三次元計測装置。
【請求項8】
前記レチクルは、一つの方向に沿って光透過量が変化する周期が等間隔のパターンが設けられている、請求項6又は7に記載の高速三次元計測装置。
【請求項9】
前記レチクルは、前記パターン光源の光軸に垂直な面と前記被測定物の面とのなす角度(θ)と、前記パターン光源の光源から光軸に沿った前記被測定物までの距離(D)と、前記パターン光源の光源と前記レチクルとの距離(d)とを定数とし、前記被測定物上の前記光源からの光軸との交点からの距離(L)をパラメータとして表される下記の関係式、
T=d・L・cosθ/(D−L・sinθ)
で規定される、前記レチクル上の前記光源からの光軸との交点からの距離(T)で、一つの方向に沿って光透過量が変化するパターンが設けられており、
前記パターン光源は、前記レチクルを介して光強度が一定周期で変化する縞状パターン光を前記被測定物の上に照射する、請求項6又は7に記載の高速三次元計測装置。
【請求項10】
前記レチクルは、前記パターン光源の光軸に垂直な面と前記被測定物の面とのなす角度(θ)と、前記パターン光源の光軸に垂直な面と前記レチクルの面とのなす角度(φ)と、前記パターン光源の光源から光軸に沿った前記被測定物までの距離(D)と、前記パターン光源の光源と前記レチクルとの距離(d)とを定数とし、前記被測定物上の前記光源からの光軸との交点からの距離(L)をパラメータとして表される下記の関係式、
U=d・L・cosθ/(D・cosφ+L・sin(φ−θ))
で規定される、前記レチクル上の前記光源からの光軸との交点からの距離(U)で、一つの方向に沿って光透過量が変化するパターンが設けられており、
前記パターン光源は、前記レチクルを介して光強度が一定周期で変化する縞状パターン光を前記被測定物の上に照射する、請求項7に記載の高速三次元計測装置。
【請求項11】
前記パターン光源は、前記光源としてラインレーザを用いる、請求項6から10のいずれか一項に記載の高速三次元計測装置。
【請求項12】
前記ラインカメラは、外部からの光を取り込むレンズの光軸を前記ラインセンサの光軸から外して、前記ラインセンサの光軸に垂直な面と、前記レンズの面を含む平面と、前記被測定物の面と、が一つの線で交差するように配置される、請求項1から11のいずれか一項に記載の高速三次元計測装置。
【請求項13】
前記計測部は、取り込んだ一組の前記光信号について、前記縞状パターン光の周期を用いた位相シフトモアレ法によって、一組の前記信号列から複数組の疑似信号列を生成し、得られた複数組の前記疑似信号列を用いて、前記被測定物の高さを算出する、請求項1から12のいずれか一項に記載の高速三次元計測装置。
【請求項14】
前記計測部は、取り込んだ一組の前記光信号について、フーリエ変換格子法を用いて、前記縞状パターン光の光強度と前記被測定物からの反射光の光強度との位相差を求め、高さを算出する、請求項1から12のいずれか一項に記載の高速三次元計測装置。
【請求項15】
被測定物の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するステップと、
前記被測定物からの前記縞状パターン光の反射光を前記一つの方向に沿ったラインについて一組の光信号として取り込むステップと、
取り込んだ一組の前記光信号について、前記縞状パターン光との関係に基づいて前記被測定物の高さを算出するステップと、
を含む高速三次元計測方法。
【請求項16】
前記被測定物の高さを算出するステップでは、取り込んだ一組の前記光信号について、前記縞状パターン光の周期を用いた位相シフトモアレ法によって、一組の前記信号列から複数組の疑似信号列を生成し、得られた複数組の前記疑似信号列を用いて、前記被測定物の高さを算出する、請求項15に記載の高速三次元計測方法。
【請求項17】
前記被測定物の高さを算出するステップでは、取り込んだ一組の前記光信号について、フーリエ変換格子法を用いて、前記縞状パターン光の光強度と前記被測定物からの反射光の光強度との位相差を求め、高さを算出する、請求項15に記載の高速三次元計測方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2011−64482(P2011−64482A)
【公開日】平成23年3月31日(2011.3.31)
【国際特許分類】
【出願番号】特願2009−213090(P2009−213090)
【出願日】平成21年9月15日(2009.9.15)
【出願人】(000001096)倉敷紡績株式会社 (296)
【Fターム(参考)】
【公開日】平成23年3月31日(2011.3.31)
【国際特許分類】
【出願日】平成21年9月15日(2009.9.15)
【出願人】(000001096)倉敷紡績株式会社 (296)
【Fターム(参考)】
[ Back to top ]