
魚探映像表示装置、魚群探知装置、目的地指定プログラム、及び目的地指定方法
【課題】魚探映像を表示するとともに、過去に取得した魚探映像が示す位置を目的地とする自動操舵を簡単な操作で行わせることができる魚探映像表示装置を提供する。
【解決手段】タッチパネル装置(魚探映像表示装置)11は、記憶部23と、表示部21と、制御部25と、を備える。記憶部23は、魚群探知機14が水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。表示部21は、探知データで構成される魚探映像を表示する。制御部25は、表示部が表示する映像に対する指定操作が行われた場合に、指定された部分を構成する探知データに対応する位置を求め、当該位置を目的地とする自動操舵を自動操舵装置16に行わせる。
【解決手段】タッチパネル装置(魚探映像表示装置)11は、記憶部23と、表示部21と、制御部25と、を備える。記憶部23は、魚群探知機14が水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。表示部21は、探知データで構成される魚探映像を表示する。制御部25は、表示部が表示する映像に対する指定操作が行われた場合に、指定された部分を構成する探知データに対応する位置を求め、当該位置を目的地とする自動操舵を自動操舵装置16に行わせる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主要には、水中を探知することで得られる探知データを表示する魚探映像表示装置に関する。
【背景技術】
【0002】
従来から、海中の探知を行う魚群探知機が知られている。魚群探知機は、海中(通常は真下方向)に向けて超音波を発射するとともに、当該超音波の反射波を受信する。そして、魚群探知機は、この反射波を分析することで、魚群の有無、水深、及び海底の状態等を示すデータを作成する。魚群探知機又は外部の表示装置が備える表示部は、魚群探知機が作成したデータに基づいて映像(魚探映像)を作成して表示する。魚探映像は、通常、深さを縦軸とし、時間を横軸としている。
【0003】
また、従来から、設定された目的地に向かうように自動で舵取りを行う自動操舵装置が知られている。この自動操舵装置は、例えば、自船から見た目的地の向きと船首方位との差を検出し、この差を補正するように舵を制御する。また、自動操舵装置としては、特許文献1に示すように、所望の位置を中心に旋回し続けることが可能な構成についても知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第4261330号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、ユーザは、魚探映像を参照して、過去に魚群を検出した位置へ自船を向かわせる場合、以下の操作を行う必要がある。即ち、ユーザは、魚探映像が表示された画面の横軸(時間軸)を参照することで、魚群を検出したときの時刻を調べる。次に、ユーザは、自船の航跡を表示部に表示して、自船の航跡と、魚群を検出した時間と、に基づいて、魚群を検出した位置を推測する。最後に、ユーザは、この位置を目的地とする指示を自動操舵装置に対して行う。以上により、過去に魚群を検出した位置へ自船を向かわせることができる。
【0006】
しかし、この方法は、複数回の操作が必要になるのでユーザにとって手間であった。また、この方法は、魚群を検出した時刻と航跡とに基づいて魚群を検出した位置を推測するため、正確な位置が指定できず、改善が望まれていた。
【0007】
本発明は以上の事情に鑑みてされたものであり、その目的は、魚探映像を表示するとともに、過去に取得した魚探映像が示す位置を目的地とする自動操舵を簡単な操作で行わせることができる魚探映像表示装置を提供することにある。
【課題を解決するための手段及び効果】
【0008】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0009】
本発明の第1の観点によれば、以下の構成の魚探映像表示装置が提供される。即ち、この魚探映像表示装置は、記憶部と、表示部と、制御部と、を備える。前記記憶部は、魚群探知機が1回の送受信で水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。前記表示部は、時系列に連続する複数の前記探知データで構成される魚探映像を表示する。前記制御部は、前記表示部が表示する魚探映像のうち指定された部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を自動操舵装置に出力する。
【0010】
これにより、ユーザは、過去の魚探映像を参照して行きたい箇所を発見したときに、単純な操作(表示画面へのタッチ操作やクリック操作)を行うだけで、該当する位置へ自船を向かわせることができる。
【0011】
前記の魚探映像表示装置においては、以下の構成とすることが好ましい。即ち、前記制御部は、前記表示部が表示する魚探映像のうち魚群を示す部分が指定された場合に、当該部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を前記自動操舵装置に出力する。
【0012】
これにより、ユーザは、単純な操作を行うだけで、過去に魚群を検出した位置へ自船を向かわせることができる。
【0013】
前記の魚探映像表示装置においては、前記制御部は、前記表示部が表示する前記魚探映像のうち魚群を示す部分が指定された場合に、当該部分の中心部を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を前記自動操舵装置に出力することが好ましい。
【0014】
これにより、魚群を示す部分のどこをユーザが指定した場合であっても、魚群を示す部分の中心部に対応する位置に自船を向かわせることができる。従って、ユーザの操作性を向上させることができる。
【0015】
前記の魚探映像表示装置においては、前記制御部は、前記表示部が表示する前記魚探映像のうち地形を示す部分が指定された場合に、当該部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を前記自動操舵装置に出力することが好ましい。
【0016】
これにより、ユーザは、単純な操作を行うだけで、地形を示す部分に対応する位置へ自船を向かわせることができる。
【0017】
前記の魚探映像表示装置においては、以下の構成とすることが好ましい。即ち、前記表示部は、海図を表示可能である。前記制御部は、指定された部分を構成する前記探知データに対応する位置を目的地とする航海ルートを作成し、当該航海ルートを海図とともに前記表示部に表示する。
【0018】
これにより、ユーザは、目的地へ向かうときの航海ルートを把握することができる。
【0019】
前記の魚探映像表示装置においては、前記制御部は、前記記憶部が記憶する前記探知データ及び当該探知データに対応する位置に基づいて、航海ルートの経由地を設定することが好ましい。
【0020】
これにより、例えば、魚群が検出された位置を目的地としたときに、その近傍に魚群が検出された箇所があれば、当該箇所を通りつつ、目的地へ自船を向かわせることができる。
【0021】
前記の魚探映像表示装置においては、前記制御部は、海図情報にアクセス可能であり、当該海図情報に基づいて航海ルートの経由地を設定することが好ましい。
【0022】
これにより、水深や漁礁の位置等に基づいて魚がいそうな位置を経由して、自船を目的地へ向かわせることができる。
【0023】
前記の魚探映像表示装置においては、前記制御部は、設定した経由地を前記表示部に表示することが好ましい。
【0024】
これにより、ユーザは、どのような経由地を通るか把握することができる。そのため、例えば不要な経由地が設定されていた場合は、航海ルートを補正することができる。
【0025】
前記の魚探映像表示装置においては、前記制御部は、作成した航海ルートに基づいた情報を前記自動操舵装置に出力することが好ましい。
【0026】
これにより、制御部が作成した航海ルートに沿って、自船を目的地まで航行させることができる。
【0027】
前記の魚探映像表示装置においては、前記制御部は、複数の航海ルートを作成して前記表示部に表示し、当該複数の航海ルートのうち指定された航海ルートに基づいた情報を前記自動操舵装置に出力することが好ましい。
【0028】
これにより、ユーザは、自ら航海ルートを作成することなく、自身の希望に合った航海ルート(目的地まで最短で向かう航海ルート、魚が釣れそうな他の経由地を多数経由する航海ルート等)で目的地まで航行することができる。
【0029】
前記の魚探映像表示装置においては、以下の構成とすることが好ましい。即ち、この魚探映像表示装置は、前記表示部の表示画面へのタッチ操作を検出可能な検出部を備える。前記制御部は、タッチ操作によって行われた前記魚探映像に対する指定を受け付ける。
【0030】
これにより、ユーザは、直感的かつ簡単な操作で、魚探映像に対する指定を行うことができる。
【0031】
本発明の第2の観点によれば、前記の魚探映像表示装置と、水中への音波の送信及び反射波の受信を行う振動子と、を備える魚群探知装置が提供される。
【0032】
これにより、本発明の効果を魚群探知装置において発揮させることができる。
【0033】
本発明の第3の観点によれば、以下の構成の目的地指定プログラムが提供される。即ち、この目的地指定プログラムは、記憶手順と、表示手順と、制御手順と、をコンピュータに実行させる。前記記憶手順では、魚群探知機が1回の送受信で水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。前記表示手順では、時系列に連続する複数の前記探知データで構成される魚探映像を表示する。前記制御手順では、前記表示手順で表示する魚探映像のうち指定された部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を自動操舵装置に出力する。
【0034】
これにより、ユーザは、過去の探知データを参照して行きたい箇所を発見したときに、単純な操作(表示画面へのタッチ操作やクリック操作)を行うだけで、該当する箇所へ自船を向かわせることができる。
【0035】
本発明の第4の観点によれば、以下の目的地指定方法が提供される。即ち、この目的地指定方法は、記憶工程と、表示工程と、制御工程と、を含む。前記記憶工程では、魚群探知機が1回の送受信で水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。前記表示工程では、時系列に連続する複数の前記探知データで構成される魚探映像を表示する。前記制御工程では、前記表示工程で表示する魚探映像のうち指定された部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を自動操舵装置に出力する。
【0036】
これにより、ユーザは、過去の探知データを参照して行きたい箇所を発見したときに、単純な操作(表示画面へのタッチ操作やクリック操作)を行うだけで、該当する箇所へ自船を向かわせることができる。
【図面の簡単な説明】
【0037】
【図1】舶用機器ネットワークシステムの全体的な構成を示すブロック図。
【図2】タッチパネル装置の正面図。
【図3】魚群を示すシンボル等が指定されたときに制御部が行う処理を示すフローチャート。
【図4】第1センサ映像及び第3センサ映像が表示された表示画面を示す図。
【図5】シンボルが指定されたときの表示画面を示す図。
【図6】航海ルートが表示されたときの表示画面を示す図。
【図7】複数の航海ルートが表示されたときの表示画面を示す図。
【発明を実施するための形態】
【0038】
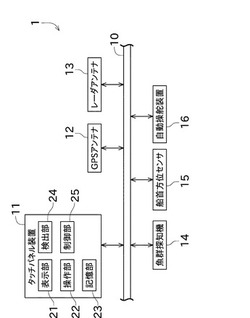
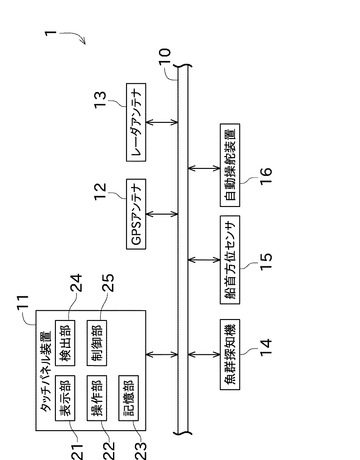
次に、図面を参照して本発明の実施の形態を説明する。図1は、舶用機器ネットワークシステム1の全体的な構成を示すブロック図である。図2は、タッチパネル装置11の正面図である。
【0039】
本実施形態の舶用機器ネットワークシステム1は、舶用ネットワーク10に接続された複数の舶用機器等から構成される。舶用機器同士は、検出した情報等を、舶用ネットワーク10を介してやり取りすることができる。舶用ネットワーク10の規格としては、例えばLAN(Local Area Network)やCAN(Controller Area Network)を採用することができる。
【0040】
図1に示すように、本実施形態の舶用機器ネットワークシステム1は、タッチパネル装置(魚探映像表示装置)11と、GPSアンテナ(GNSSセンサ)12と、レーダアンテナ13と、魚群探知機(音響センサ)14と、船首方位センサ15と、自動操舵装置16と、を備えている。
【0041】
タッチパネル装置11は、他の舶用機器(センサ)が検出した情報に基づいて映像(センサ映像)を作成して表示するとともに、表示画面へのタッチ操作を検出して検出結果に応じた処理を行う構成である。具体的には、タッチパネル装置11は、表示部21と、操作部22と、記憶部23と、検出部24と、制御部25と、を備えている。
【0042】
表示部21は、液晶ディスプレイ等で構成されており、前述のように、センサ映像や、各種設定画面等を表示画面に表示することができる。
【0043】
操作部22は、例えば、時計回り又は反時計回りに回転させる操作が可能な回転キー、及び、メニュー画面を呼び出すためのメニューキー等で構成されている。なお、タッチパネル装置11は、画面へのタッチ操作により入力及び指示を行うことができるので、操作部22のキーの数を低減することができる。
【0044】
記憶部23は、制御部25が実行するプログラムの内容、海図情報、及びユーザに設定された航海ルート等を記憶している。
【0045】
検出部24は、ユーザによる画面へのタッチ操作を検出する。本実施形態では、タッチ操作を検出する方式として、投影型の静電容量方式を用いている。この方式は、ディスプレイパネル上に、透過性の高い複数の電極を配置しておき、指先がパネルに接近した際に発生する各電極の静電容量の変化に基づいて、タッチ位置を検出する構成である。この構成では、タッチされた位置だけでなく、タッチした状態での指の動き(タッチ位置の変化)も検出することができる。また、検出部24は、同時に2点以上タッチされている場合のそれぞれのタッチ位置及びタッチ位置の変化についても検出することができる。検出部24が検出したタッチ位置及びタッチ位置の変化は、制御部25へ出力される。なお、タッチ操作を検出する方式は投影型の静電容量方式に限られず、適宜の方式を用いることができる。また、指によるタッチ操作以外にも、例えば先細状の棒状の部材によるタッチ操作を検出する構成であっても良い。
【0046】
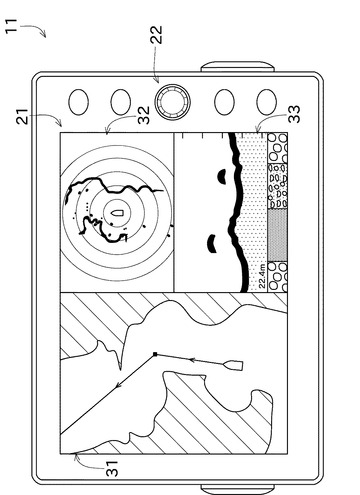
制御部25は、記憶部23の記憶内容及び他の舶用機器から受信した情報に基づいて前記センサ映像(レーダ映像や自船周囲の海図等)を作成し、表示部21に表示する。制御部25は、複数の舶用機器から情報を受信しており、複数のセンサ映像を作成する。制御部25は、この複数のセンサ映像のうち1つのみを表示画面に表示するモード(全画面モード)と、表示画面を分割して複数のセンサ映像を表示するモード(分割画面モード、図2を参照)と、を切替可能である。
【0047】
また、制御部25は、予め設定されたタッチ操作の内容(タッチジェスチャ)と、検出部24が検出したタッチ位置の変化と、のマッチングを行うことにより、ユーザがどのタッチジェスチャを行ったかを特定する。そして、制御部25は、特定したタッチジェスチャに対応付けられた処理を行う。
【0048】
タッチジェスチャの具体例としては、「ドラッグ操作」を挙げることができる。ドラッグ操作とは、タッチした指(通常は1本)を画面から離さずに所定の方向へ移動させるタッチジェスチャである。このドラッグ操作には、通常は、画像のスクロールが対応付けられている。なお、このドラッグ操作には、画面にタッチしたまま指を素早く動かす操作(フリック操作)等も含まれるものとする。また、タッチジェスチャの他の例としては、「ピンチ操作」を挙げることができる。ピンチ操作とは、タッチした2本の指を画面から離さずに、指同士を近づける(ピンチイン)又は離す(ピンチアウト)操作である。このピンチ操作には、通常は、画像の縮尺を変更する処理が対応付けられている。なお、制御部25は、上記で示した例以外にも様々なタッチジェスチャを特定することができる。
【0049】
GPSアンテナ12は、GPS衛星(GNSS衛星)からの測位信号を受信して、舶用ネットワーク10を介して、タッチパネル装置11等へ出力している。タッチパネル装置11の制御部25は、この測位信号に基づいて自船の位置(詳細には、GPSアンテナの位置、地球基準の絶対位置)を求めている。なお、測位信号から位置を求める演算をGPSアンテナ12側で行い、自船の位置をタッチパネル装置11へ出力する構成であっても良い。
【0050】
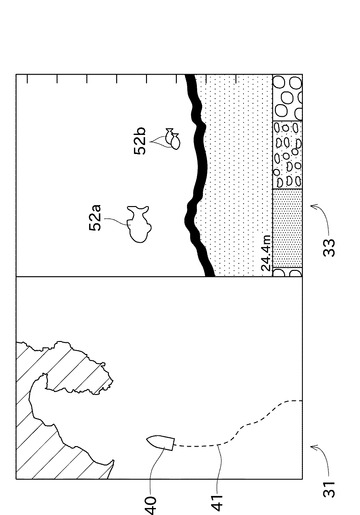
タッチパネル装置11は、求めた自船の位置と、記憶部23に記憶された海図情報と、に基づいて、航法装置としての機能を発揮することができる。具体的には、制御部25は、取得した自船の位置と、記憶部23に記憶した海図情報と、に基づいて、海図上に自船の位置を重畳して表示部21に表示することができる。また、制御部25は、時刻に応じて変化する自船の位置を利用して、対地船速を求めたり、自船の航跡を求めたりして表示部21に表示することができる。更に、制御部25は、ユーザのタッチ操作によって目的地及びウェイポイント(経由地)が選択されることにより、航海ルートを作成して表示部21に表示することができる(図2に示す第1センサ映像31を参照)。
【0051】
レーダアンテナ13は、マイクロ波の送信を行うとともに、物標からの反射波を受信する。この反射波は、適宜の信号処理が行われた後に、タッチパネル装置11へ出力される。タッチパネル装置11は、この反射波に基づいてレーダ映像を作成する。具体的には、タッチパネル装置11の制御部25は、マイクロ波を送信してから反射波を受信するまでの時間から、物標の距離を求める。また、制御部25は、マイクロ波を送信した方向に基づいて、物標が存在する方向を求める。制御部25は、このようにしてレーダ映像を作成して、表示部21に表示する(図2に示す第2センサ映像32を参照)。
【0052】
魚群探知機14は、振動子と、分析部と、から構成される。振動子は、船底等に設置され、所定のタイミング(例えば所定の時間毎)で海中の真下方向に向けて超音波を発射するとともに、海底又は魚群からの反射波を受信する。以下では、魚群探知機14が超音波の1回の送受信で水中を探知して得られるデータを探知データと称する。分析部は、この探知データを分析して、魚群や海底の状態を示すデータを作成する。また、本実施形態の魚群探知機14は、取得した探知データに基づいて、海底の状態(底質)を判定する機能を有している。具体的には、分析部は、受信した探知データを分析することで、海底が岩、礫(石)、砂、及び泥の何れの可能性が高いかを判定することができる。分析部が作成した魚群や海底の状態を示すデータは、タッチパネル装置11へ出力される。そして、タッチパネル装置11の制御部25は、受信したデータに基づいて第3センサ映像(魚探映像)33を作成し(図2を参照)、表示部21に表示する。第3センサ映像33において、縦軸は水深を示しており、当該水深に応じた魚群等のデータが表示される。一方、横軸は、時間を示しており、画面の左側に行くほど古いデータが表示される。
【0053】
船首方位センサ15は、自船の船首方向(船首が向いている方向)を、地球基準の絶対的な方位で検出するように構成されている。一般的に船舶は、船首方向へ向かって前進する。従って、船首方位センサ15は、船体の前進方向の方位を検出していると言うこともできる。船首方位センサ15は、例えば磁気方位センサや、GPSコンパス等を利用することができる。
【0054】
自動操舵装置16は、設定された航海ルートに沿って自船が移動するように舵の操作を自動的に行う装置である。具体的には、自動操舵装置16は、船首方位センサ15から取得した船首方位と、タッチパネル装置11から取得した航海ルートと、に基づいて、自船の船首をどれだけ変化させれば良いかを求める。そして、自動操舵装置16は、求めた値に応じて舵角を変化させることにより、自船の針路を航海ルートに一致させる。
【0055】
本実施形態の舶用機器ネットワークシステム1は、以上のように構成される。なお、舶用機器ネットワークシステム1を構成する舶用機器は任意であり、上記で説明した以外の舶用機器が接続される構成であっても良いし、同種の舶用機器が複数接続される構成であっても良い。また、舶用機器が取得したデータの処理は、当該舶用機器で行う構成であっても良いし、タッチパネル装置11の制御部25で行う構成であっても良い。
【0056】
次に、第3センサ映像(魚探映像)33を参照して魚釣りや漁を行う際に、ユーザが行う操作及び制御部25が行う制御について説明する。本実施形態では、第3センサ映像33の魚群を示す部分(エコーや後述のシンボル等)をユーザが指定することにより、指定された魚群の位置を目的地とする自動操舵を自動操舵装置16に行わせることができる。
【0057】
初めに、この機能を実現するために、魚群探知機14及び制御部25が第3センサ映像33の作成時に行う処理について説明する。魚群探知機14は、例えばGPSアンテナ12から測位信号を受信することで、自船の位置を把握することができる。また、魚群探知機14は、内蔵された時計等により、時刻を把握している。そのため、魚群探知機14は、探知データに、当該探知データを取得したときの時刻及び自船の位置を対応付けることができる。魚群探知機14は、探知データと、対応付けた時刻及び自船の位置と、を制御部25へ送信する。
【0058】
制御部25は、探知データ、及び対応付けられた時刻及び自船の位置を魚群探知機14から受信すると、これらの情報を記憶部23に記憶する。そして、探知データ及び時刻に基づいて第3センサ映像33を作成して、表示部21に表示する。
【0059】
なお、探知データと、時刻及び位置と、を対応付ける処理は、魚群探知機14ではなくタッチパネル装置11で行う構成であっても良い。
【0060】
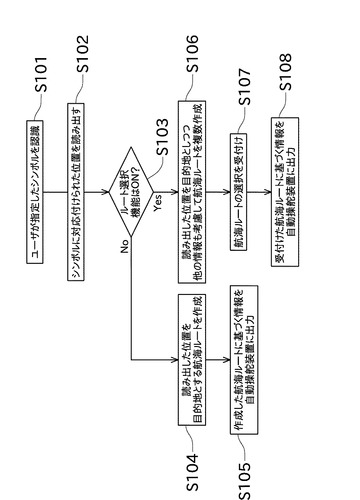
次に、ユーザが魚群を示すシンボル等を指定したときに、制御部25が行う処理について、図3から図7までを参照して説明する。図3は、魚群を示すシンボル等が指定されたときに制御部25が行う処理を示すフローチャートである。図4から図7までは、表示部21の表示画面を示す図である。
【0061】
ユーザは、第3センサ映像33を参照することで、例えば、検出された魚群の内容と、当該魚群が検出された時刻と、を知ることができる。魚群の内容としては、例えば群れの規模、魚体長、及び魚体長等から求められる魚種等がある。タッチパネル装置11は、検出された魚群の表示方法として、受信したエコー信号をそのまま表示したり(図2の第3センサ映像33を参照)、当該エコーから魚体長等を求め、魚体長(又は魚種等)に応じたシンボルを用いて表示したり(図4のシンボル52a,52bを参照)することができる。なお、シンボルは時間的に連続した複数の探知データに基づいて作成されている。そして、記憶部23には、シンボルと、当該シンボルの中心部を構成する探知データに対応する位置と、を関連付けて記憶する。
【0062】
ユーザは、第3センサ映像33を参照して所望の魚群が表示されている箇所を発見したときは、当該シンボル等を指定する操作(指定操作)を行う。この指定操作としては、例えば表示画面上のシンボル等を長押しする方法や、一瞬だけシンボル等に触れるタップ、連続した2度のタップを行うダブルタップ等が考えられる。また、所定の指定モードに移行させた後に、上記のタッチ操作を行う構成であっても良い。
【0063】
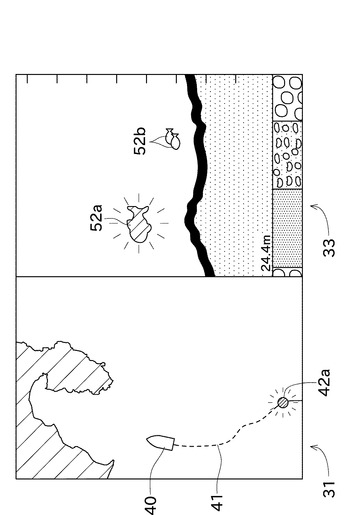
また、ユーザが指定を行う対象としては、魚群を示すシンボル及びエコーだけででなく、例えば、第3センサ映像33の下部に配置された底質を示す表示、魚群以外のエコー(例えば海底を示すエコー)等、任意の箇所に対して指定を行うことができる。なお、本実施形態では、ユーザは、シンボル52aを指定したものとする。
【0064】
検出部24は、ユーザの指定操作を検出すると、検出結果を制御部25へ出力する。制御部25は、入力された検出結果に基づいて、ユーザがどのシンボルを指定したか等を認識することができる(S101)。制御部25は、シンボルが指定されたことを認識すると、記憶部23の記憶内容を参照して、当該シンボルに関連付けられた位置を読み出す(S102)。
【0065】
そして、制御部25は、図5に示すように、指定されたシンボル52aをハイライト表示する。また、制御部25は、第1センサ映像31上に、シンボル52aに対応付けられた位置を示す検出マーク42aを表示する。なお、第1センサ映像31には、検出マーク42aの他にも、現在の自船の位置を示す自船マーク40と、自船が通った軌跡を示す航跡41と、が表示されている。
【0066】
次に、制御部25は、シンボル52aに対応付けられた位置を目的地とする航海ルートを作成する。また、本実施形態のタッチパネル装置11は、複数の航海ルートを制御部25に作成させて、選択した航海ルートに沿って目的地へ向かう機能(ルート選択機能)を有している。
【0067】
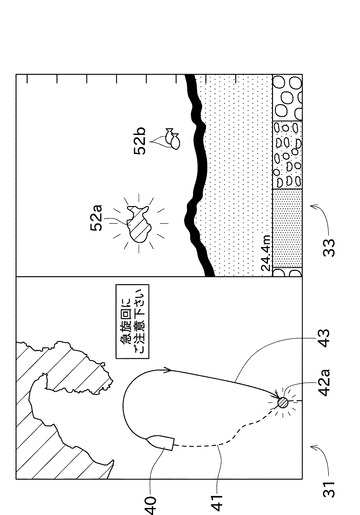
制御部25は、このルート選択機能がONであるかOFFであるかを判断し(S103)、OFFである場合は、シンボル52aに対応付けられた位置を目的地とした航海ルート(例えば他の箇所を経由せずに素早く目的地へ向かう航海ルート)を1つ作成して第1センサ映像31に表示する(S104、図6の航海ルート43)。なお、航海ルート43が急旋回を伴う場合、メッセージの表示(図6を参照)や、光又は音等によって、その旨をユーザに通知する構成であっても良い。
【0068】
その後、制御部25は、作成した航海ルートに基づいた情報(航海ルートを特定する適宜の形式の情報)を自動操舵装置16に出力する(S105)。自動操舵装置16は、受信した情報に基づいて、シンボル52aに対応付けられた位置を目的地とする自動操舵を行う。以上により、ユーザは、単純な操作を行うだけで、第3センサ映像33から指定した位置へ自船を向かわせることができる。
【0069】
なお、航海ルートの作成は必須ではなく、制御部25は、目的地を特定する適宜の形式の情報(緯度及び経度等)を自動操舵装置16に出力する構成であっても良い。この場合、自動操舵装置16は、自船から見た目的地の向きと船首方位との差を検出し、この差を補正するように舵を制御する。なお、本明細書において、目的地に基づいた情報とは、目的地を特定する適宜の形式の情報だけでなく、前述の航海ルートに基づいた情報も含む概念とする。
【0070】
次に、ルート選択機能がONである場合について説明する。なお、この場合においてもシンボル52aがユーザに指定されたとする。制御部25は、シンボルに対応付けられた位置を読み出した後に(S102)、読み出した位置及び他の情報を考慮して航海ルートを複数作成する(S106)。
【0071】
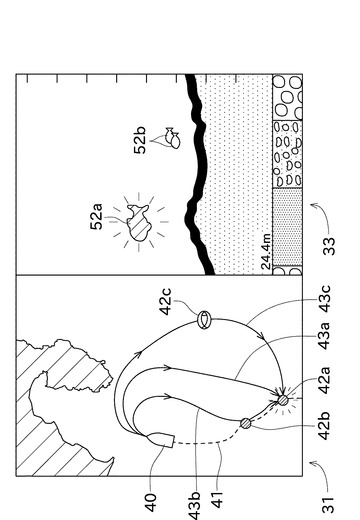
以下、図7を参照して、S106において制御部25が作成する航海ルートについて、具体例を3つ(航海ルート43a〜43c)挙げて説明する。1つ目の航海ルート43aは、ルート選択機能がOFFである場合に作成した航海ルートと同じであって、素早く目的地に到着できることを目的として作られる。
【0072】
2つ目の航海ルート43bは、過去に取得した探知データに基づいて作成される。第3センサ映像33に示すように、魚群探知機14は、ユーザが指定したシンボル52aより少し後にもシンボル52bで示される魚群を検出している。これを考慮して、制御部25は、シンボル52bを検出した位置を通りつつ、シンボル52aに対応付けられた位置へ自船を向かわせるように航海ルート43bを作成する。なお、制御部25は、この経由地として設定した位置(シンボル52bが検出された位置)を、第1センサ映像31上に表示する(図7の検出マーク42bを参照)。
【0073】
3つ目の航海ルート43cは、記憶部23が記憶する海図情報に基づいて作成される。海図情報には漁礁の位置や水深等が記載されているので、制御部25は、目的地の近傍にあって、かつ魚がいそうな位置を把握することができる。制御部25は、この魚がいそうな位置(図7では漁礁)を経由しつつ、シンボル52aに対応付けられた位置へ自船を向かわせるように航海ルート43cを作成する。また、制御部25は、この経由地として設定した箇所(漁礁が存在する箇所)を、第1センサ映像31上に表示する(図7の漁礁マーク42cを参照)。
【0074】
ユーザは、上記のようにして作成された航海ルートから採用する航海ルートを選択する。制御部25は、このユーザの選択を受け付けると(S107)、受け付けた航海ルートに基づく情報を自動操舵装置16へ出力する(S108)。自動操舵装置16は、受信した情報に基づいて、ユーザが選択した航海ルートに沿って自動操舵を行う。以上により、ユーザは、自ら航海ルートを作成することなく、自身の希望に合った航海ルートで目的地まで航行することができる。
【0075】
以上に示したように、タッチパネル装置(魚探映像表示装置)11は、記憶部23と、表示部21と、制御部25と、を備える。記憶部23は、魚群探知機14が1回の送受信で水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。表示部21は、時系列に連続する複数の前記探知データで構成される魚探映像を表示する。制御部25は、表示部21が表示する魚探映像のうち指定された部分(タッチされた部分)を構成する探知データに対応する位置を目的地とし、当該目的地に基づいた情報を自動操舵装置16に出力する。
【0076】
これにより、ユーザは、過去の探知データを参照して行きたい箇所を発見したときに、表示画面へのタッチ操作を行うだけで、該当する箇所へ自船を向かわせることができる。
【0077】
以上に本発明の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
【0078】
上記実施形態では、タッチ操作によってシンボル等を指定する構成であるが、タッチパネル式以外の表示装置にも本発明を適用できる。例えば、マウスやトラックボールが接続される表示装置においては、表示画面上のポインタを用いてシンボル等を指定する構成を採用することができる。
【0079】
上記実施形態は、シンボルがタッチされたときに、当該シンボルの中央に対応する位置を目的地とする構成である。これに代えて、シンボルがタッチされた場合であっても、当該タッチ位置を構成する探知データに対応する位置を目的地とする構成であっても良い。また、シンボルではなく魚群を示すエコー(図2の第3センサ映像33を参照)がタッチされた場合においても、当該エコーの中央に対応する位置を目的地とする構成であっても良いし、タッチ位置を構成する探知データに対応する位置を目的地とする構成であっても良い。
【0080】
過去の探知データや海図情報に基づいて経由地を設定する際に、複数の経由地が設定される構成であっても良い。
【0081】
過去の探知データに基づいて経由地を設定する際に、指定されたシンボルと同じ種類の魚を検出した箇所を優先的に経由地に設定する構成であっても良い。また、直近に取得した探知データだけでなく、例えば数日前に取得した探知データに基づいて、経由地を設定する構成としても良い。
【0082】
上記実施形態は、表示画面を分割することで第1センサ映像31と第3センサ映像33とを同時に表示可能な構成であるが、航海ルートを表示する際に第3センサ映像33から第1センサ映像31に切り替わる構成であっても良い。
【0083】
本実施形態のタッチパネル装置11は、多数のセンサから情報を受信して表示する汎用型の表示装置であるが、魚群探知機14と、探知データを表示可能な表示部とで構成される魚群探知装置にも本発明を適用することができる。
【符号の説明】
【0084】
1 舶用機器ネットワークシステム
10 舶用ネットワーク
11 タッチパネル装置(魚探映像表示装置)
12 GPSアンテナ
13 レーダアンテナ
14 魚群探知機
15 船首方位センサ
16 自動操舵装置
21 表示部
22 操作部
23 記憶部
24 検出部
25 制御部
【技術分野】
【0001】
本発明は、主要には、水中を探知することで得られる探知データを表示する魚探映像表示装置に関する。
【背景技術】
【0002】
従来から、海中の探知を行う魚群探知機が知られている。魚群探知機は、海中(通常は真下方向)に向けて超音波を発射するとともに、当該超音波の反射波を受信する。そして、魚群探知機は、この反射波を分析することで、魚群の有無、水深、及び海底の状態等を示すデータを作成する。魚群探知機又は外部の表示装置が備える表示部は、魚群探知機が作成したデータに基づいて映像(魚探映像)を作成して表示する。魚探映像は、通常、深さを縦軸とし、時間を横軸としている。
【0003】
また、従来から、設定された目的地に向かうように自動で舵取りを行う自動操舵装置が知られている。この自動操舵装置は、例えば、自船から見た目的地の向きと船首方位との差を検出し、この差を補正するように舵を制御する。また、自動操舵装置としては、特許文献1に示すように、所望の位置を中心に旋回し続けることが可能な構成についても知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第4261330号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、ユーザは、魚探映像を参照して、過去に魚群を検出した位置へ自船を向かわせる場合、以下の操作を行う必要がある。即ち、ユーザは、魚探映像が表示された画面の横軸(時間軸)を参照することで、魚群を検出したときの時刻を調べる。次に、ユーザは、自船の航跡を表示部に表示して、自船の航跡と、魚群を検出した時間と、に基づいて、魚群を検出した位置を推測する。最後に、ユーザは、この位置を目的地とする指示を自動操舵装置に対して行う。以上により、過去に魚群を検出した位置へ自船を向かわせることができる。
【0006】
しかし、この方法は、複数回の操作が必要になるのでユーザにとって手間であった。また、この方法は、魚群を検出した時刻と航跡とに基づいて魚群を検出した位置を推測するため、正確な位置が指定できず、改善が望まれていた。
【0007】
本発明は以上の事情に鑑みてされたものであり、その目的は、魚探映像を表示するとともに、過去に取得した魚探映像が示す位置を目的地とする自動操舵を簡単な操作で行わせることができる魚探映像表示装置を提供することにある。
【課題を解決するための手段及び効果】
【0008】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0009】
本発明の第1の観点によれば、以下の構成の魚探映像表示装置が提供される。即ち、この魚探映像表示装置は、記憶部と、表示部と、制御部と、を備える。前記記憶部は、魚群探知機が1回の送受信で水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。前記表示部は、時系列に連続する複数の前記探知データで構成される魚探映像を表示する。前記制御部は、前記表示部が表示する魚探映像のうち指定された部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を自動操舵装置に出力する。
【0010】
これにより、ユーザは、過去の魚探映像を参照して行きたい箇所を発見したときに、単純な操作(表示画面へのタッチ操作やクリック操作)を行うだけで、該当する位置へ自船を向かわせることができる。
【0011】
前記の魚探映像表示装置においては、以下の構成とすることが好ましい。即ち、前記制御部は、前記表示部が表示する魚探映像のうち魚群を示す部分が指定された場合に、当該部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を前記自動操舵装置に出力する。
【0012】
これにより、ユーザは、単純な操作を行うだけで、過去に魚群を検出した位置へ自船を向かわせることができる。
【0013】
前記の魚探映像表示装置においては、前記制御部は、前記表示部が表示する前記魚探映像のうち魚群を示す部分が指定された場合に、当該部分の中心部を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を前記自動操舵装置に出力することが好ましい。
【0014】
これにより、魚群を示す部分のどこをユーザが指定した場合であっても、魚群を示す部分の中心部に対応する位置に自船を向かわせることができる。従って、ユーザの操作性を向上させることができる。
【0015】
前記の魚探映像表示装置においては、前記制御部は、前記表示部が表示する前記魚探映像のうち地形を示す部分が指定された場合に、当該部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を前記自動操舵装置に出力することが好ましい。
【0016】
これにより、ユーザは、単純な操作を行うだけで、地形を示す部分に対応する位置へ自船を向かわせることができる。
【0017】
前記の魚探映像表示装置においては、以下の構成とすることが好ましい。即ち、前記表示部は、海図を表示可能である。前記制御部は、指定された部分を構成する前記探知データに対応する位置を目的地とする航海ルートを作成し、当該航海ルートを海図とともに前記表示部に表示する。
【0018】
これにより、ユーザは、目的地へ向かうときの航海ルートを把握することができる。
【0019】
前記の魚探映像表示装置においては、前記制御部は、前記記憶部が記憶する前記探知データ及び当該探知データに対応する位置に基づいて、航海ルートの経由地を設定することが好ましい。
【0020】
これにより、例えば、魚群が検出された位置を目的地としたときに、その近傍に魚群が検出された箇所があれば、当該箇所を通りつつ、目的地へ自船を向かわせることができる。
【0021】
前記の魚探映像表示装置においては、前記制御部は、海図情報にアクセス可能であり、当該海図情報に基づいて航海ルートの経由地を設定することが好ましい。
【0022】
これにより、水深や漁礁の位置等に基づいて魚がいそうな位置を経由して、自船を目的地へ向かわせることができる。
【0023】
前記の魚探映像表示装置においては、前記制御部は、設定した経由地を前記表示部に表示することが好ましい。
【0024】
これにより、ユーザは、どのような経由地を通るか把握することができる。そのため、例えば不要な経由地が設定されていた場合は、航海ルートを補正することができる。
【0025】
前記の魚探映像表示装置においては、前記制御部は、作成した航海ルートに基づいた情報を前記自動操舵装置に出力することが好ましい。
【0026】
これにより、制御部が作成した航海ルートに沿って、自船を目的地まで航行させることができる。
【0027】
前記の魚探映像表示装置においては、前記制御部は、複数の航海ルートを作成して前記表示部に表示し、当該複数の航海ルートのうち指定された航海ルートに基づいた情報を前記自動操舵装置に出力することが好ましい。
【0028】
これにより、ユーザは、自ら航海ルートを作成することなく、自身の希望に合った航海ルート(目的地まで最短で向かう航海ルート、魚が釣れそうな他の経由地を多数経由する航海ルート等)で目的地まで航行することができる。
【0029】
前記の魚探映像表示装置においては、以下の構成とすることが好ましい。即ち、この魚探映像表示装置は、前記表示部の表示画面へのタッチ操作を検出可能な検出部を備える。前記制御部は、タッチ操作によって行われた前記魚探映像に対する指定を受け付ける。
【0030】
これにより、ユーザは、直感的かつ簡単な操作で、魚探映像に対する指定を行うことができる。
【0031】
本発明の第2の観点によれば、前記の魚探映像表示装置と、水中への音波の送信及び反射波の受信を行う振動子と、を備える魚群探知装置が提供される。
【0032】
これにより、本発明の効果を魚群探知装置において発揮させることができる。
【0033】
本発明の第3の観点によれば、以下の構成の目的地指定プログラムが提供される。即ち、この目的地指定プログラムは、記憶手順と、表示手順と、制御手順と、をコンピュータに実行させる。前記記憶手順では、魚群探知機が1回の送受信で水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。前記表示手順では、時系列に連続する複数の前記探知データで構成される魚探映像を表示する。前記制御手順では、前記表示手順で表示する魚探映像のうち指定された部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を自動操舵装置に出力する。
【0034】
これにより、ユーザは、過去の探知データを参照して行きたい箇所を発見したときに、単純な操作(表示画面へのタッチ操作やクリック操作)を行うだけで、該当する箇所へ自船を向かわせることができる。
【0035】
本発明の第4の観点によれば、以下の目的地指定方法が提供される。即ち、この目的地指定方法は、記憶工程と、表示工程と、制御工程と、を含む。前記記憶工程では、魚群探知機が1回の送受信で水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。前記表示工程では、時系列に連続する複数の前記探知データで構成される魚探映像を表示する。前記制御工程では、前記表示工程で表示する魚探映像のうち指定された部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を自動操舵装置に出力する。
【0036】
これにより、ユーザは、過去の探知データを参照して行きたい箇所を発見したときに、単純な操作(表示画面へのタッチ操作やクリック操作)を行うだけで、該当する箇所へ自船を向かわせることができる。
【図面の簡単な説明】
【0037】
【図1】舶用機器ネットワークシステムの全体的な構成を示すブロック図。
【図2】タッチパネル装置の正面図。
【図3】魚群を示すシンボル等が指定されたときに制御部が行う処理を示すフローチャート。
【図4】第1センサ映像及び第3センサ映像が表示された表示画面を示す図。
【図5】シンボルが指定されたときの表示画面を示す図。
【図6】航海ルートが表示されたときの表示画面を示す図。
【図7】複数の航海ルートが表示されたときの表示画面を示す図。
【発明を実施するための形態】
【0038】
次に、図面を参照して本発明の実施の形態を説明する。図1は、舶用機器ネットワークシステム1の全体的な構成を示すブロック図である。図2は、タッチパネル装置11の正面図である。
【0039】
本実施形態の舶用機器ネットワークシステム1は、舶用ネットワーク10に接続された複数の舶用機器等から構成される。舶用機器同士は、検出した情報等を、舶用ネットワーク10を介してやり取りすることができる。舶用ネットワーク10の規格としては、例えばLAN(Local Area Network)やCAN(Controller Area Network)を採用することができる。
【0040】
図1に示すように、本実施形態の舶用機器ネットワークシステム1は、タッチパネル装置(魚探映像表示装置)11と、GPSアンテナ(GNSSセンサ)12と、レーダアンテナ13と、魚群探知機(音響センサ)14と、船首方位センサ15と、自動操舵装置16と、を備えている。
【0041】
タッチパネル装置11は、他の舶用機器(センサ)が検出した情報に基づいて映像(センサ映像)を作成して表示するとともに、表示画面へのタッチ操作を検出して検出結果に応じた処理を行う構成である。具体的には、タッチパネル装置11は、表示部21と、操作部22と、記憶部23と、検出部24と、制御部25と、を備えている。
【0042】
表示部21は、液晶ディスプレイ等で構成されており、前述のように、センサ映像や、各種設定画面等を表示画面に表示することができる。
【0043】
操作部22は、例えば、時計回り又は反時計回りに回転させる操作が可能な回転キー、及び、メニュー画面を呼び出すためのメニューキー等で構成されている。なお、タッチパネル装置11は、画面へのタッチ操作により入力及び指示を行うことができるので、操作部22のキーの数を低減することができる。
【0044】
記憶部23は、制御部25が実行するプログラムの内容、海図情報、及びユーザに設定された航海ルート等を記憶している。
【0045】
検出部24は、ユーザによる画面へのタッチ操作を検出する。本実施形態では、タッチ操作を検出する方式として、投影型の静電容量方式を用いている。この方式は、ディスプレイパネル上に、透過性の高い複数の電極を配置しておき、指先がパネルに接近した際に発生する各電極の静電容量の変化に基づいて、タッチ位置を検出する構成である。この構成では、タッチされた位置だけでなく、タッチした状態での指の動き(タッチ位置の変化)も検出することができる。また、検出部24は、同時に2点以上タッチされている場合のそれぞれのタッチ位置及びタッチ位置の変化についても検出することができる。検出部24が検出したタッチ位置及びタッチ位置の変化は、制御部25へ出力される。なお、タッチ操作を検出する方式は投影型の静電容量方式に限られず、適宜の方式を用いることができる。また、指によるタッチ操作以外にも、例えば先細状の棒状の部材によるタッチ操作を検出する構成であっても良い。
【0046】
制御部25は、記憶部23の記憶内容及び他の舶用機器から受信した情報に基づいて前記センサ映像(レーダ映像や自船周囲の海図等)を作成し、表示部21に表示する。制御部25は、複数の舶用機器から情報を受信しており、複数のセンサ映像を作成する。制御部25は、この複数のセンサ映像のうち1つのみを表示画面に表示するモード(全画面モード)と、表示画面を分割して複数のセンサ映像を表示するモード(分割画面モード、図2を参照)と、を切替可能である。
【0047】
また、制御部25は、予め設定されたタッチ操作の内容(タッチジェスチャ)と、検出部24が検出したタッチ位置の変化と、のマッチングを行うことにより、ユーザがどのタッチジェスチャを行ったかを特定する。そして、制御部25は、特定したタッチジェスチャに対応付けられた処理を行う。
【0048】
タッチジェスチャの具体例としては、「ドラッグ操作」を挙げることができる。ドラッグ操作とは、タッチした指(通常は1本)を画面から離さずに所定の方向へ移動させるタッチジェスチャである。このドラッグ操作には、通常は、画像のスクロールが対応付けられている。なお、このドラッグ操作には、画面にタッチしたまま指を素早く動かす操作(フリック操作)等も含まれるものとする。また、タッチジェスチャの他の例としては、「ピンチ操作」を挙げることができる。ピンチ操作とは、タッチした2本の指を画面から離さずに、指同士を近づける(ピンチイン)又は離す(ピンチアウト)操作である。このピンチ操作には、通常は、画像の縮尺を変更する処理が対応付けられている。なお、制御部25は、上記で示した例以外にも様々なタッチジェスチャを特定することができる。
【0049】
GPSアンテナ12は、GPS衛星(GNSS衛星)からの測位信号を受信して、舶用ネットワーク10を介して、タッチパネル装置11等へ出力している。タッチパネル装置11の制御部25は、この測位信号に基づいて自船の位置(詳細には、GPSアンテナの位置、地球基準の絶対位置)を求めている。なお、測位信号から位置を求める演算をGPSアンテナ12側で行い、自船の位置をタッチパネル装置11へ出力する構成であっても良い。
【0050】
タッチパネル装置11は、求めた自船の位置と、記憶部23に記憶された海図情報と、に基づいて、航法装置としての機能を発揮することができる。具体的には、制御部25は、取得した自船の位置と、記憶部23に記憶した海図情報と、に基づいて、海図上に自船の位置を重畳して表示部21に表示することができる。また、制御部25は、時刻に応じて変化する自船の位置を利用して、対地船速を求めたり、自船の航跡を求めたりして表示部21に表示することができる。更に、制御部25は、ユーザのタッチ操作によって目的地及びウェイポイント(経由地)が選択されることにより、航海ルートを作成して表示部21に表示することができる(図2に示す第1センサ映像31を参照)。
【0051】
レーダアンテナ13は、マイクロ波の送信を行うとともに、物標からの反射波を受信する。この反射波は、適宜の信号処理が行われた後に、タッチパネル装置11へ出力される。タッチパネル装置11は、この反射波に基づいてレーダ映像を作成する。具体的には、タッチパネル装置11の制御部25は、マイクロ波を送信してから反射波を受信するまでの時間から、物標の距離を求める。また、制御部25は、マイクロ波を送信した方向に基づいて、物標が存在する方向を求める。制御部25は、このようにしてレーダ映像を作成して、表示部21に表示する(図2に示す第2センサ映像32を参照)。
【0052】
魚群探知機14は、振動子と、分析部と、から構成される。振動子は、船底等に設置され、所定のタイミング(例えば所定の時間毎)で海中の真下方向に向けて超音波を発射するとともに、海底又は魚群からの反射波を受信する。以下では、魚群探知機14が超音波の1回の送受信で水中を探知して得られるデータを探知データと称する。分析部は、この探知データを分析して、魚群や海底の状態を示すデータを作成する。また、本実施形態の魚群探知機14は、取得した探知データに基づいて、海底の状態(底質)を判定する機能を有している。具体的には、分析部は、受信した探知データを分析することで、海底が岩、礫(石)、砂、及び泥の何れの可能性が高いかを判定することができる。分析部が作成した魚群や海底の状態を示すデータは、タッチパネル装置11へ出力される。そして、タッチパネル装置11の制御部25は、受信したデータに基づいて第3センサ映像(魚探映像)33を作成し(図2を参照)、表示部21に表示する。第3センサ映像33において、縦軸は水深を示しており、当該水深に応じた魚群等のデータが表示される。一方、横軸は、時間を示しており、画面の左側に行くほど古いデータが表示される。
【0053】
船首方位センサ15は、自船の船首方向(船首が向いている方向)を、地球基準の絶対的な方位で検出するように構成されている。一般的に船舶は、船首方向へ向かって前進する。従って、船首方位センサ15は、船体の前進方向の方位を検出していると言うこともできる。船首方位センサ15は、例えば磁気方位センサや、GPSコンパス等を利用することができる。
【0054】
自動操舵装置16は、設定された航海ルートに沿って自船が移動するように舵の操作を自動的に行う装置である。具体的には、自動操舵装置16は、船首方位センサ15から取得した船首方位と、タッチパネル装置11から取得した航海ルートと、に基づいて、自船の船首をどれだけ変化させれば良いかを求める。そして、自動操舵装置16は、求めた値に応じて舵角を変化させることにより、自船の針路を航海ルートに一致させる。
【0055】
本実施形態の舶用機器ネットワークシステム1は、以上のように構成される。なお、舶用機器ネットワークシステム1を構成する舶用機器は任意であり、上記で説明した以外の舶用機器が接続される構成であっても良いし、同種の舶用機器が複数接続される構成であっても良い。また、舶用機器が取得したデータの処理は、当該舶用機器で行う構成であっても良いし、タッチパネル装置11の制御部25で行う構成であっても良い。
【0056】
次に、第3センサ映像(魚探映像)33を参照して魚釣りや漁を行う際に、ユーザが行う操作及び制御部25が行う制御について説明する。本実施形態では、第3センサ映像33の魚群を示す部分(エコーや後述のシンボル等)をユーザが指定することにより、指定された魚群の位置を目的地とする自動操舵を自動操舵装置16に行わせることができる。
【0057】
初めに、この機能を実現するために、魚群探知機14及び制御部25が第3センサ映像33の作成時に行う処理について説明する。魚群探知機14は、例えばGPSアンテナ12から測位信号を受信することで、自船の位置を把握することができる。また、魚群探知機14は、内蔵された時計等により、時刻を把握している。そのため、魚群探知機14は、探知データに、当該探知データを取得したときの時刻及び自船の位置を対応付けることができる。魚群探知機14は、探知データと、対応付けた時刻及び自船の位置と、を制御部25へ送信する。
【0058】
制御部25は、探知データ、及び対応付けられた時刻及び自船の位置を魚群探知機14から受信すると、これらの情報を記憶部23に記憶する。そして、探知データ及び時刻に基づいて第3センサ映像33を作成して、表示部21に表示する。
【0059】
なお、探知データと、時刻及び位置と、を対応付ける処理は、魚群探知機14ではなくタッチパネル装置11で行う構成であっても良い。
【0060】
次に、ユーザが魚群を示すシンボル等を指定したときに、制御部25が行う処理について、図3から図7までを参照して説明する。図3は、魚群を示すシンボル等が指定されたときに制御部25が行う処理を示すフローチャートである。図4から図7までは、表示部21の表示画面を示す図である。
【0061】
ユーザは、第3センサ映像33を参照することで、例えば、検出された魚群の内容と、当該魚群が検出された時刻と、を知ることができる。魚群の内容としては、例えば群れの規模、魚体長、及び魚体長等から求められる魚種等がある。タッチパネル装置11は、検出された魚群の表示方法として、受信したエコー信号をそのまま表示したり(図2の第3センサ映像33を参照)、当該エコーから魚体長等を求め、魚体長(又は魚種等)に応じたシンボルを用いて表示したり(図4のシンボル52a,52bを参照)することができる。なお、シンボルは時間的に連続した複数の探知データに基づいて作成されている。そして、記憶部23には、シンボルと、当該シンボルの中心部を構成する探知データに対応する位置と、を関連付けて記憶する。
【0062】
ユーザは、第3センサ映像33を参照して所望の魚群が表示されている箇所を発見したときは、当該シンボル等を指定する操作(指定操作)を行う。この指定操作としては、例えば表示画面上のシンボル等を長押しする方法や、一瞬だけシンボル等に触れるタップ、連続した2度のタップを行うダブルタップ等が考えられる。また、所定の指定モードに移行させた後に、上記のタッチ操作を行う構成であっても良い。
【0063】
また、ユーザが指定を行う対象としては、魚群を示すシンボル及びエコーだけででなく、例えば、第3センサ映像33の下部に配置された底質を示す表示、魚群以外のエコー(例えば海底を示すエコー)等、任意の箇所に対して指定を行うことができる。なお、本実施形態では、ユーザは、シンボル52aを指定したものとする。
【0064】
検出部24は、ユーザの指定操作を検出すると、検出結果を制御部25へ出力する。制御部25は、入力された検出結果に基づいて、ユーザがどのシンボルを指定したか等を認識することができる(S101)。制御部25は、シンボルが指定されたことを認識すると、記憶部23の記憶内容を参照して、当該シンボルに関連付けられた位置を読み出す(S102)。
【0065】
そして、制御部25は、図5に示すように、指定されたシンボル52aをハイライト表示する。また、制御部25は、第1センサ映像31上に、シンボル52aに対応付けられた位置を示す検出マーク42aを表示する。なお、第1センサ映像31には、検出マーク42aの他にも、現在の自船の位置を示す自船マーク40と、自船が通った軌跡を示す航跡41と、が表示されている。
【0066】
次に、制御部25は、シンボル52aに対応付けられた位置を目的地とする航海ルートを作成する。また、本実施形態のタッチパネル装置11は、複数の航海ルートを制御部25に作成させて、選択した航海ルートに沿って目的地へ向かう機能(ルート選択機能)を有している。
【0067】
制御部25は、このルート選択機能がONであるかOFFであるかを判断し(S103)、OFFである場合は、シンボル52aに対応付けられた位置を目的地とした航海ルート(例えば他の箇所を経由せずに素早く目的地へ向かう航海ルート)を1つ作成して第1センサ映像31に表示する(S104、図6の航海ルート43)。なお、航海ルート43が急旋回を伴う場合、メッセージの表示(図6を参照)や、光又は音等によって、その旨をユーザに通知する構成であっても良い。
【0068】
その後、制御部25は、作成した航海ルートに基づいた情報(航海ルートを特定する適宜の形式の情報)を自動操舵装置16に出力する(S105)。自動操舵装置16は、受信した情報に基づいて、シンボル52aに対応付けられた位置を目的地とする自動操舵を行う。以上により、ユーザは、単純な操作を行うだけで、第3センサ映像33から指定した位置へ自船を向かわせることができる。
【0069】
なお、航海ルートの作成は必須ではなく、制御部25は、目的地を特定する適宜の形式の情報(緯度及び経度等)を自動操舵装置16に出力する構成であっても良い。この場合、自動操舵装置16は、自船から見た目的地の向きと船首方位との差を検出し、この差を補正するように舵を制御する。なお、本明細書において、目的地に基づいた情報とは、目的地を特定する適宜の形式の情報だけでなく、前述の航海ルートに基づいた情報も含む概念とする。
【0070】
次に、ルート選択機能がONである場合について説明する。なお、この場合においてもシンボル52aがユーザに指定されたとする。制御部25は、シンボルに対応付けられた位置を読み出した後に(S102)、読み出した位置及び他の情報を考慮して航海ルートを複数作成する(S106)。
【0071】
以下、図7を参照して、S106において制御部25が作成する航海ルートについて、具体例を3つ(航海ルート43a〜43c)挙げて説明する。1つ目の航海ルート43aは、ルート選択機能がOFFである場合に作成した航海ルートと同じであって、素早く目的地に到着できることを目的として作られる。
【0072】
2つ目の航海ルート43bは、過去に取得した探知データに基づいて作成される。第3センサ映像33に示すように、魚群探知機14は、ユーザが指定したシンボル52aより少し後にもシンボル52bで示される魚群を検出している。これを考慮して、制御部25は、シンボル52bを検出した位置を通りつつ、シンボル52aに対応付けられた位置へ自船を向かわせるように航海ルート43bを作成する。なお、制御部25は、この経由地として設定した位置(シンボル52bが検出された位置)を、第1センサ映像31上に表示する(図7の検出マーク42bを参照)。
【0073】
3つ目の航海ルート43cは、記憶部23が記憶する海図情報に基づいて作成される。海図情報には漁礁の位置や水深等が記載されているので、制御部25は、目的地の近傍にあって、かつ魚がいそうな位置を把握することができる。制御部25は、この魚がいそうな位置(図7では漁礁)を経由しつつ、シンボル52aに対応付けられた位置へ自船を向かわせるように航海ルート43cを作成する。また、制御部25は、この経由地として設定した箇所(漁礁が存在する箇所)を、第1センサ映像31上に表示する(図7の漁礁マーク42cを参照)。
【0074】
ユーザは、上記のようにして作成された航海ルートから採用する航海ルートを選択する。制御部25は、このユーザの選択を受け付けると(S107)、受け付けた航海ルートに基づく情報を自動操舵装置16へ出力する(S108)。自動操舵装置16は、受信した情報に基づいて、ユーザが選択した航海ルートに沿って自動操舵を行う。以上により、ユーザは、自ら航海ルートを作成することなく、自身の希望に合った航海ルートで目的地まで航行することができる。
【0075】
以上に示したように、タッチパネル装置(魚探映像表示装置)11は、記憶部23と、表示部21と、制御部25と、を備える。記憶部23は、魚群探知機14が1回の送受信で水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。表示部21は、時系列に連続する複数の前記探知データで構成される魚探映像を表示する。制御部25は、表示部21が表示する魚探映像のうち指定された部分(タッチされた部分)を構成する探知データに対応する位置を目的地とし、当該目的地に基づいた情報を自動操舵装置16に出力する。
【0076】
これにより、ユーザは、過去の探知データを参照して行きたい箇所を発見したときに、表示画面へのタッチ操作を行うだけで、該当する箇所へ自船を向かわせることができる。
【0077】
以上に本発明の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
【0078】
上記実施形態では、タッチ操作によってシンボル等を指定する構成であるが、タッチパネル式以外の表示装置にも本発明を適用できる。例えば、マウスやトラックボールが接続される表示装置においては、表示画面上のポインタを用いてシンボル等を指定する構成を採用することができる。
【0079】
上記実施形態は、シンボルがタッチされたときに、当該シンボルの中央に対応する位置を目的地とする構成である。これに代えて、シンボルがタッチされた場合であっても、当該タッチ位置を構成する探知データに対応する位置を目的地とする構成であっても良い。また、シンボルではなく魚群を示すエコー(図2の第3センサ映像33を参照)がタッチされた場合においても、当該エコーの中央に対応する位置を目的地とする構成であっても良いし、タッチ位置を構成する探知データに対応する位置を目的地とする構成であっても良い。
【0080】
過去の探知データや海図情報に基づいて経由地を設定する際に、複数の経由地が設定される構成であっても良い。
【0081】
過去の探知データに基づいて経由地を設定する際に、指定されたシンボルと同じ種類の魚を検出した箇所を優先的に経由地に設定する構成であっても良い。また、直近に取得した探知データだけでなく、例えば数日前に取得した探知データに基づいて、経由地を設定する構成としても良い。
【0082】
上記実施形態は、表示画面を分割することで第1センサ映像31と第3センサ映像33とを同時に表示可能な構成であるが、航海ルートを表示する際に第3センサ映像33から第1センサ映像31に切り替わる構成であっても良い。
【0083】
本実施形態のタッチパネル装置11は、多数のセンサから情報を受信して表示する汎用型の表示装置であるが、魚群探知機14と、探知データを表示可能な表示部とで構成される魚群探知装置にも本発明を適用することができる。
【符号の説明】
【0084】
1 舶用機器ネットワークシステム
10 舶用ネットワーク
11 タッチパネル装置(魚探映像表示装置)
12 GPSアンテナ
13 レーダアンテナ
14 魚群探知機
15 船首方位センサ
16 自動操舵装置
21 表示部
22 操作部
23 記憶部
24 検出部
25 制御部
【特許請求の範囲】
【請求項1】
魚群探知機が1回の送受信で水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する記憶部と、
時系列に連続する複数の前記探知データで構成される魚探映像を表示する表示部と、
前記表示部が表示する魚探映像のうち指定された部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を自動操舵装置に出力する制御部と、
を備えることを特徴とする魚探映像表示装置。
【請求項2】
請求項1に記載の魚探映像表示装置であって、
前記制御部は、前記表示部が表示する魚探映像のうち魚群を示す部分が指定された場合に、
当該部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を前記自動操舵装置に出力することを特徴とする魚探映像表示装置。
【請求項3】
請求項1に記載の魚探映像表示装置であって、
前記制御部は、前記表示部が表示する前記魚探映像のうち魚群を示す部分が指定された場合に、当該部分の中心部を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を前記自動操舵装置に出力することを特徴とする魚探映像表示装置。
【請求項4】
請求項1から3までの何れか一項に記載の魚探映像表示装置であって、
前記制御部は、前記表示部が表示する前記魚探映像のうち地形を示す部分が指定された場合に、当該部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を前記自動操舵装置に出力することを特徴とする魚探映像表示装置。
【請求項5】
請求項1から4までの何れか一項に記載の魚探映像表示装置であって、
前記表示部は、海図を表示可能であり、
前記制御部は、指定された部分を構成する前記探知データに対応する位置を目的地とする航海ルートを作成し、当該航海ルートを海図とともに前記表示部に表示することを特徴とする魚探映像表示装置。
【請求項6】
請求項5に記載の魚探映像表示装置であって、
前記制御部は、前記記憶部が記憶する前記探知データ及び当該探知データに対応する位置に基づいて、航海ルートの経由地を設定することを特徴とする魚探映像表示装置。
【請求項7】
請求項5又は6に記載の魚探映像表示装置であって、
前記制御部は、海図情報にアクセス可能であり、当該海図情報に基づいて航海ルートの経由地を設定することを特徴とする魚探映像表示装置。
【請求項8】
請求項6又は7に記載の魚探映像表示装置であって、
前記制御部は、設定した経由地を前記表示部に表示することを特徴とする魚探映像表示装置。
【請求項9】
請求項5から8までの何れか一項に記載の魚探映像表示装置であって、
前記制御部は、作成した航海ルートに基づいた情報を前記自動操舵装置に出力することを特徴とする魚探映像表示装置。
【請求項10】
請求項5から9までの何れか一項に記載の魚探映像表示装置であって、
前記制御部は、複数の航海ルートを作成して前記表示部に表示し、当該複数の航海ルートのうち指定された航海ルートに基づいた情報を前記自動操舵装置に出力することを特徴とする魚探映像表示装置。
【請求項11】
請求項1から10までの何れか一項に記載の魚探映像表示装置であって、
前記表示部の表示画面へのタッチ操作を検出可能な検出部を備え、
前記制御部は、タッチ操作によって行われた前記魚探映像に対する指定を受け付けることを特徴とする魚探映像表示装置。
【請求項12】
請求項1から11までの何れか一項に記載の魚探映像表示装置と、
水中への音波の送信及び反射波の受信を行う振動子と、
を備えることを特徴とする魚群探知装置。
【請求項13】
コンピュータに、
魚群探知機が1回の送受信で水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する記憶手順と、
時系列に連続する複数の前記探知データで構成される魚探映像を表示する表示手順と、
前記表示手順で表示する魚探映像のうち指定された部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を自動操舵装置に出力する制御手順と、
を実行させる目的地指定プログラム。
【請求項14】
魚群探知機が1回の送受信で水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する記憶工程と、
時系列に連続する複数の前記探知データで構成される魚探映像を表示する表示工程と、
前記表示工程で表示する魚探映像のうち指定された部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を自動操舵装置に出力する制御工程と、
を含むことを特徴とする目的地指定方法。
【請求項1】
魚群探知機が1回の送受信で水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する記憶部と、
時系列に連続する複数の前記探知データで構成される魚探映像を表示する表示部と、
前記表示部が表示する魚探映像のうち指定された部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を自動操舵装置に出力する制御部と、
を備えることを特徴とする魚探映像表示装置。
【請求項2】
請求項1に記載の魚探映像表示装置であって、
前記制御部は、前記表示部が表示する魚探映像のうち魚群を示す部分が指定された場合に、
当該部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を前記自動操舵装置に出力することを特徴とする魚探映像表示装置。
【請求項3】
請求項1に記載の魚探映像表示装置であって、
前記制御部は、前記表示部が表示する前記魚探映像のうち魚群を示す部分が指定された場合に、当該部分の中心部を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を前記自動操舵装置に出力することを特徴とする魚探映像表示装置。
【請求項4】
請求項1から3までの何れか一項に記載の魚探映像表示装置であって、
前記制御部は、前記表示部が表示する前記魚探映像のうち地形を示す部分が指定された場合に、当該部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を前記自動操舵装置に出力することを特徴とする魚探映像表示装置。
【請求項5】
請求項1から4までの何れか一項に記載の魚探映像表示装置であって、
前記表示部は、海図を表示可能であり、
前記制御部は、指定された部分を構成する前記探知データに対応する位置を目的地とする航海ルートを作成し、当該航海ルートを海図とともに前記表示部に表示することを特徴とする魚探映像表示装置。
【請求項6】
請求項5に記載の魚探映像表示装置であって、
前記制御部は、前記記憶部が記憶する前記探知データ及び当該探知データに対応する位置に基づいて、航海ルートの経由地を設定することを特徴とする魚探映像表示装置。
【請求項7】
請求項5又は6に記載の魚探映像表示装置であって、
前記制御部は、海図情報にアクセス可能であり、当該海図情報に基づいて航海ルートの経由地を設定することを特徴とする魚探映像表示装置。
【請求項8】
請求項6又は7に記載の魚探映像表示装置であって、
前記制御部は、設定した経由地を前記表示部に表示することを特徴とする魚探映像表示装置。
【請求項9】
請求項5から8までの何れか一項に記載の魚探映像表示装置であって、
前記制御部は、作成した航海ルートに基づいた情報を前記自動操舵装置に出力することを特徴とする魚探映像表示装置。
【請求項10】
請求項5から9までの何れか一項に記載の魚探映像表示装置であって、
前記制御部は、複数の航海ルートを作成して前記表示部に表示し、当該複数の航海ルートのうち指定された航海ルートに基づいた情報を前記自動操舵装置に出力することを特徴とする魚探映像表示装置。
【請求項11】
請求項1から10までの何れか一項に記載の魚探映像表示装置であって、
前記表示部の表示画面へのタッチ操作を検出可能な検出部を備え、
前記制御部は、タッチ操作によって行われた前記魚探映像に対する指定を受け付けることを特徴とする魚探映像表示装置。
【請求項12】
請求項1から11までの何れか一項に記載の魚探映像表示装置と、
水中への音波の送信及び反射波の受信を行う振動子と、
を備えることを特徴とする魚群探知装置。
【請求項13】
コンピュータに、
魚群探知機が1回の送受信で水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する記憶手順と、
時系列に連続する複数の前記探知データで構成される魚探映像を表示する表示手順と、
前記表示手順で表示する魚探映像のうち指定された部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を自動操舵装置に出力する制御手順と、
を実行させる目的地指定プログラム。
【請求項14】
魚群探知機が1回の送受信で水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する記憶工程と、
時系列に連続する複数の前記探知データで構成される魚探映像を表示する表示工程と、
前記表示工程で表示する魚探映像のうち指定された部分を構成する前記探知データに対応する位置を目的地とし、当該目的地に基づいた情報を自動操舵装置に出力する制御工程と、
を含むことを特徴とする目的地指定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−79813(P2013−79813A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−218617(P2011−218617)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
[ Back to top ]