
鳥または飛行物体の検知方法
本発明は、少なくとも1つのレーダ(5)の形式の、少なくとも1羽の鳥または別の飛行物体の電波を検出する手段を使用し、各レーダ(5)からのアナログ画像をデジタル画像に変換し、外側安全領域(7)と内側安全領域(8)を前記画像に適用してレーダ(5)毎に安全空間を生成し、次に、安全領域(7、8)内で検出があった場合に措置をとることにより、単一の風力タービン(1)に対する鳥または物体の飛行レベルを検出する方法に関する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、工業敷地の近傍における鳥類種または他の飛翔動物の保護との関連で、鳥類学的分野に関する。
【背景技術】
【0002】
本発明は、エネルギー生産用の風力発電所内の鳥の検出、および発電用工業風力タービンの動翼(moving blade)と鳥が衝突するのを防止することに特定用途を見出す。
【0003】
工業風力タービンは、翼板(blade)と鳥の衝突(より正確には翼板の自由端における衝突)によってかなりの数の鳥が死亡する原因となっている。The Ligue pour la Protection des Oiseaux(LPO)(鳥類保護連盟)はこの点において、すべての種に関し、鳥の死亡が風力発電所当たり年間0.01〜36羽に達すると考えている。
【0004】
風力タービンの翼板と衝突する可能性のある大多数の小さな鳥の種(例えば、スズメ科またはアマツバメ等の無足鳥の科(the family of apodal birds))に関しては、それらの母集団の大きさが、他の死因(道路交通、電線と高架線、捕食動物(特に家畜(猫、犬等))と比較しこの衝突死亡率をごく低いものにしている。
【0005】
しかしながら、この状況は、猛禽類(鷲、ハゲタカ、トビまたは同類の鳥)または他の長距離飛行鳥種(コウノトリまたは他の鳥)等の大型種に関しては異なる。具体的には、これらの種は低生殖率の低母集団を有する。その結果、風力タービンに関連する追加の死亡はこれらの種にとって重要であり、その低減は現実の課題である。これらの種は希少で絶滅寸前であって国内および国際保護取り組みの対象であるのでなおさらそうである。
【0006】
風力タービンとの衝突による自然保護鳥種の死亡のケースについて行なわれた研究の解析によると、第一に、死亡のケースの地理的分布が多くの地球上の場所:北欧(オジロワシ)、ドイツ(アカトビ)、スコットランド(イヌワシ)、スペイン(グリフィンハゲタカ、エジプトハゲワシ、コウノトリ、ナベコウ)、アメリカ合衆国(イヌワシ)、オーストラリア(オオイヌワシ)、フランス(コウノトリ)および日本(ミサゴ)をカバーすることを示している。
【0007】
また、これらの種は回転風力タービンに直面しても絶大なる自信を示す(ハゲタカとトビ)。これらの種は、スコットランドで鷲がそうするように、好天候条件および低視界の両方において、翼板により掃引される空間内に飛び込む可能性がある。ある種(アカトビ、イヌワシ、オジロワシ)は、翼板と衝突した他の鳥類の死骸を取って食べるために風力発電所にさらに積極的に頻繁に集まる。
【0008】
また、衝突の危険は、特定の地理的特徴(起伏、露出、風条件)を通常呈する移動の主軸上でより高い。これらの特定の特徴は、熱上昇または地形性上昇の区域を形成する場所を鳥があちこちに移動し易くするので鳥類により求められる。衝突の危険はまた、鳥が多く集まるえさ場または生殖地近くで著しく増加する。
【0009】
衝突は翼板の先端部と鳥の体の先端部(頭、尾、羽根の端)との間で最も頻繁に発生することに留意されたい。結局のところ、風力タービンに近づけば近づくほど鳥はその端が最高200km/hの速度に達し得る翼板の回転速度を少なく予想するものと仮定される。
【0010】
自然保護種と考えられる種に関するこれらの死亡率の大きさは風力発電所の開発と利用に対するかなりの障害となり、既に米国(Altamont Pass、カリフォルニア州)とスペインにおける機械の一時的または決定的停止、鳥類学者による風力発電所の恒久的な監視(オーストラリア)、および設置プロジェクトの取り消し(ドイツ)の原因となっている。これらの停止とこれらに伴う論争が、風力発電所の開発と利用との両方の観点から、再生可能風エネルギーの開発に関連する財政投資を脅かしている。
【0011】
風力タービンの設計の適合化と希少種の生殖地である場所にそれらを設置することとの解決策は今なお余り実りあるものではない。これは一方では鳥の移動の決定と運営に関し躊躇しがちな理論的基礎のためであり、他方では時間と空間にわたるこれらの移動が種と個体に固有の動態に関連するかなりの偶然性を有するためである。
【0012】
風エネルギーの開発と生物多様性保存とを調和させるために、自然保護種との衝突の危険性が迫ると風力タービンを停止させることができる検出方法と装置が開発されている。
【0013】
最も効果的なシステムは、風力発電所を監視するために電波(すなわちレーダ:RAdio Detection And Ranging)による距離の検知および推定手段を含む。また、レーダ検出は鳥の移動(特には、鳥の渡り時の)を研究するために鳥類学者により既に広く使用されてきた。
【0014】
レーダは通常、マイクロ電磁波を送受信することにより空間内の物体の距離を検出し測定するために使用されることに留意されたい。実行形態と実際の用途は現在極めて多様であるが、最も広く用いられかつ最も経済的に手頃な装置は現在「海洋」タイプのレーダである。後者は通常、Xバンド、SバンドまたはLバンドのパルスを有するほぼ20°のビーム角度高さの回転式レーダである。これらは通常、水平面で使用される(すなわち、送信ビームの垂直角の中線は地平線と平行である)。
【0015】
実際には、レーダ電波の送信ビーム内で検知された物体は送信ビームの垂直角の中線上に投影される。検出された物体は次に二次元面内の1つまたは複数のエコーの形式で表される。
【0016】
この検出方法の大きな欠点は、物体がレーダ電波送信源から離れれば離れるほどその検出が信頼できなくなることにある。具体的には物体と送信源との距離が長くなればなるほどその結果のエコーは大きさと位置の点で不正確となる。
【0017】
上に説明したように、このようなレーダは飛行中の鳥の検出に既に使用されている。3つの検出方法が主として単一レーダによる鳥類学関連で使用されている。
【0018】
第1の方法は、地平線と平行な平面上にレーダビームの垂直角の中線を配置する。レーダの「追尾:trail」機能を使用することにより二次元の水平面上に鳥の軌道をマッピングすることが可能である。しかしながらこの技術は飛行中の鳥の高度を確認することができない。
【0019】
第2の方法は、地平線に垂直な面上にレーダビームの垂直角の中線を配置する。このとき地面に対する鳥の高度を決定することが可能であるがその軌道を確認することができない。
【0020】
最後に、最後の方法は、レーダビームの垂直角の中線を可変角度(通常は地平線に対し45°)で傾斜して配置する。理論的にはこの配置により鳥の高度と移動方向を示すことができる。しかしながら実際には、高度を決定するためにデータの数学的処理を必要とするのでこれはほとんど使用されない。また、検出空間は他の2つの検出方法のものよりも制限される。
【0021】
他のシステムは2つのレーダを組み合わせて一つは垂直位に他の一つは水平位にする。航空機と衝突する鳥の危険性を防止するのに空港で使用されるこれらのシステムは所与の空間における鳥の高度と軌道を確認することができる。しかしながら、これらは記録された軌道のそれぞれの高度を具体的に決定できず、逆もまた同様である。
【0022】
そうであるので、レーダを使用する鳥類学的研究の主目的はできるだけ遠くのできるだけ小さな種を検知することである。これを行うために、使用されるレーダは今では、主として高電力(長さが1メートルを越えたアンテナで数百キロワット)のものである。このようなレーダは複雑であり、事実上恒久的な技術者の存在を必要とし、高価である。したがってこれらは、定期的に位置を変えるために移動式であるように設計されることが多い。
【0023】
他の検出システムは、例えばドップラーレーダまたは追跡レーダ(追跡レーダシステム:Tracking Radar Systems)などのようにさらに高度である。これらは鳥の検出に使用可能であるが、そのコスト、その高度技術性、その使用限界のために、この分野での実際の用途をこれまで見出すことができていない。具体的には、追跡レーダシステムは何も無い空間を移動する飛行物体を追跡することができるが、物体が風力タービンに近い場合は動翼により撹乱される。
【0024】
上記技術と装置は、陸上または海における1つまたは複数の風力タービンの近くでの検出に使用される。しかしながら、それらの設置が最も普及したのは後者の海上関連においてである。具体的には、陸上では、水平面内の数百メートルから数キロメートルの長い範囲を有する海上レーダの検出能力は固体障害物(地面、起伏、樹木または建物)により生成される影区域(shadow zone)により著しく制限される。
【0025】
この欠点は、不透明かつ固定の視覚的障壁を通過する物体の検出を提案する米国特許出願公開第2002/0140597号によりその解決策を見出す。これを行うために、いくつかの非回転式モノスタティックレーダアンテナのネットワークが設置され、こうして測定された検出データがコンピュータ上で処理される。
【0026】
しかしながら、このようなシステムは風力タービン近くの検出に適さない。これは、一方では、風力タービンの翼板は、水平および垂直面内で同時に移動することができるが空間内の静止障壁とはみなせない物体であるからである。したがってこのようなシステムは翼板の検出を避けることができず、翼板と移動し得る他の物体とを区別することができない。また、検出角度は工業風力タービンの翼板により掃引される全領域をカバーしない。
【0027】
したがって、翼板との衝突の十分な危険の妥当性を示すために風力タービン近くの鳥または飛行物体の位置を十分な精度で検出するという課題が発生し、したがって検出は、翼板の運動の制動および/または停止とを自動的に引き起こす必要がある。したがってこの検出は、風向きおよびしたがって翼板の回転の位置に関係なく、翼板により掃引される球から最大で数メートルの三次元空間内で実行されなければならない。
【0028】
上述のようにレーダにより鳥を検出するシステムは鳥または他の任意の飛行物体の運動の研究に広く使用されているが、これらは手頃でかつ耐えられるコストでこの目的を満たすために必要かつ十分な特徴を有しない。これは、このようなシステムは一方では風力タービン等の別の移動物体近くの三次元内に同一の物体を忠実に配置する能力の欠如に悩まされ、他方ではその検出精度が距離とともに低下するレーダ電波の物理的偶発性にさらには環境偶発性(物理的障害物と起伏)に悩まされるためである。
【0029】
しかしながら、飛行物体が十分に近い(すなわち、翼板から最大で数十メートルの)場合に物体の衝突を防止するために風力タービンの減速または全停止を制御するために、風力タービン(その翼板は動いている)近くの飛行物体を検出するための解決策が考案されている。このような解決策は、風力タービンのタービン上の、マスト上の、あるいは翼板の回転中心から定められた距離の翼板上のナセル(nacelle)に取り付けられた超音波検出器を使用することによる飛翔物(特にはコウモリ)の検出を提案するDE 10 2005 046860号に記載されている。
【0030】
しかしながら鳥は超音波をほとんど放射しないまたは全く放射しないので、鳥を検出することは大いに制限される。この特許文書は超音波検出器の代わりにレーダを使用することを想定するが、それらがどのように働くかそしてこのような検出システムの特徴について全く規定してない。
【0031】
風力タービン近くで飛行中の物体を検出するための他の技術は、赤外線検出器またはサーマルカメラを利用する。しかしながら従来技術では、これらのシステムは、風力タービン近くの鳥の移動を記録することができるだけであり翼板と鳥の衝突を予想することができない。また、これらのシステムはまた、同一の風力タービンの翼板により掃引される空間の全体より小さな検出領域を有する。したがって風力タービンを停止するためのシステムと組み合わせても、これらは衝突を効果的に防止することができない。
【0032】
最後に、風力タービンに飛び込む物体を検出するための衝突音検出システムがある。しかしながら本来、これらのシステムは衝突を記録するがそれらを防止することができない。
【0033】
同様に、鳥または飛行物体が風力タービンから十分に遠くに移動した後の風力タービンの再起動を制御できるシステムは存在しない。この情況でのレーダの適用の難しさは、ある風力発電所(特には、オーストラリアの)において鳥類学者が、風力タービンの開始と停止を手動で制御することにより衝突による死亡を防止するために、希少で絶滅の危機に瀕したある種の運動を視覚的に連続的に監視するようなものである。
【発明の概要】
【発明が解決しようとする課題】
【0034】
したがって公知の検知装置は十分な満足を与えない。本発明の目的は、工業風力タービンの利用の関連ではその実施コストが依然として手頃でかつ耐えられるものである適切で標準化され自動化された検出制御装置を提案することにより従来技術の欠点を緩和することである。本発明はまた、天候に関係なく、日中および夜間の両方で、変わり得る大きさと形態の鳥類を検出するという利点を提供する。
【課題を解決するための手段】
【0035】
現在使用されている方法とは違って、本発明の目的は、単一の風力タービンの直周囲、および風力タービンの翼板により掃引される容積(すなわち、タービンを中心とする球の容積)により形成される危険区域だけを監視することである。この球は風力タービンの翼板の遠端部の回転円を表し、タービンの垂直回転軸を中心に回転するように設定される。
【0036】
これを行うために、本発明は、第一に、物体が存在しない場合に環境の基準コンピュータ画像を生成することにより、そして物体が監視空間に入った後この基準画像の状態変化を解析することにより、単一の風力タービンの極近傍に入る物体の移動を検出することを提案する。
【0037】
本発明は、回転翼により掃引される球に対応する危険区域に同じ手法を適用することを提案する。したがって、「周囲」と「危険区域」はレーダの全検出領域のうちの2つの区域:特定区域と補間的区域、であると理解される。
【0038】
また、本発明の意味するところの検出は3次元結果を有する二次元安全域を想定する。具体的には、二次元レーダ像上の安全域の生成はレーダの従来の機能である。次に、物体または安全域内の運動の検出はある措置を引き起こす(通常は警報)。上記システムは、二次元画像内の安全域を検出するための検出特性だけを使用する。換言すれば、逆の能力を明示的かつ具体的に使用するシステムは存在しない、すなわち、二次元で生成された安全域は、レーダにより送信された波ビームの水平角と垂直角が知られている場合に三次元容積を理論的に定義できるようにする。このときこの容積の境界線はレーダにより送信される波ビームの垂直角の中線に垂直な投射であってこの同じ中線上に定義される二次元境界線の同じビームの三次元の外側境界線上への投射である。
【0039】
したがって、本発明の目的は、広く利用される「海洋」タイプのレーダの技術に基づき標準化され自動化された技術の装置を定義することである。本装置は地上ベースの工業風力タービンの利用の関連では手頃でかつ耐えられるコストを有する一方で、風力タービンの大きさおよび空間内の翼板の位置に関係なく、工業風力タービンの動翼に十分に近い(すなわち、動翼から数メートルの)空中を飛行中の少なくとも1羽の鳥あるいは移動する他の任意の飛行物体を、その空間内の位置に関係なく、必要かつ十分な精度で検知できるようにする。また、本発明の目的は、この鳥または飛行物体の近傍が翼板と鳥または飛行物体との衝突の危険をなすように検出を判断することであり、したがって鳥または飛行物体が通り過ぎるおよび/または立ち去るまで翼板の運動の制動または停止を制御する必要がある。
【0040】
小さな鳥を検出することができるが、本発明は、その死が自然保護種の保護に関連する環境影響を与える自然保護種(大きなサイズであることが多い)の検出にその主用途を見出すであろう。また、技術的には、本発明により使用される手段は、ある大きさを越えるターゲットの検出との関連では最大許容干渉エコーを発見する。
【0041】
本発明はまた、風エネルギーの生成のための工業敷地の利用において商業的利点を提供する。
【0042】
具体的には、本発明による検出は、低コストであり、設置される場所に固定されしたがって専用化され、設置および維持するのが容易であるという利点がある。
【0043】
この目的のため、本発明は、電波手段が少なくとも1羽の鳥または他の飛行物体を検出するために使用される、少なくとも1つのレーダ形式である、単一の風力タービンに対する鳥レベルを検出する方法に関する。本方法は、
−各レーダにより風力タービンの軸方向に送信される波ビームの上下高が風力タービンの回転翼の理論掃引容積により形成される球のすべてまたは一部をカバーするように、各レーダをその水平軸上で傾斜させる工程と、
−各レーダの結果としての二次元アナログ画像をレーダ毎の独立したデジタル画像に変換する工程と、
−各レーダの各デジタル画像に、一方ではその中心が球の中心に位置しその寸法が球のものより大きい外側二次元安全域を適用し他方では球の寸法以下の寸法を有する内側安全域を適用してレーダ毎の安全容積を生成する工程と、
−各レーダの安全域が、各レーダのそれぞれの安全域の和により形成される全安全域に従って互いに補完するように、各レーダを風力タービンから一定の距離で独立に配置する工程と、
−安全域の一方または他方内で検出があった場合に、措置を取る工程と、を含む。
【0044】
本発明の他の特徴と利点は、添付図面を参照し、本発明の非限定的実施形態の以下の詳細説明から明らかになるであろう。
【図面の簡単な説明】
【0045】
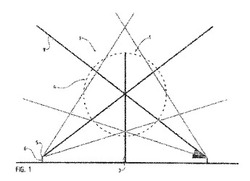
【図1】本発明による検知装置の縦断面の概略図を表す。
【図2】本発明による検出方法を使用した連続的工程の概略図を表す。
【図3】本発明による検出方法を使用した連続的工程の概略図を表す。
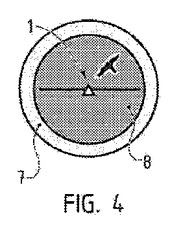
【図4】本発明による検出方法を使用した連続的工程の概略図を表す。
【発明を実施するための形態】
【0046】
本発明は風力タービン1に対する鳥レベルを検出するためのシステムに関し、具体的には、単一の風力タービン1に対する鳥または飛行物体レベルを検出する方法に関する。
【0047】
特に、この検出は、風力タービン1の回転翼の理論掃引容積により形成される球4を含む監視空間内の鳥のいかなる侵入も検出し、このような球4への接近を検出し、次に侵入の場合には措置(特には、風力タービン1の動作への自動的介入)を想定することを提案する。
【0048】
介入は風力タービン1の翼板の回転の減速と次に必要に応じ翼板の回転の全停止とを含み得ることに留意されたい。
【0049】
これを行うために、本発明は、少なくとも1つのレーダ5(特には、2つのレーダ5)形式の電波により少なくとも1羽の鳥または他の飛行物体を検出する手段を使用することを提案する。
【0050】
具体的には、レーダ5は「海洋」タイプであってよい、すなわちそれらはXバンド、Sバンド、またはLバンド回転式レーダである。また、各レーダ5は有利には、少なくとも10度(特には20度)の垂直波ビーム高さ、10キロワット未満の電力、および長さ1メートル未満のアンテナを有することができる。
【0051】
また本発明は、各レーダ5により風力タービン1の軸方向に送信される波ビームの上下高が球4のすべてまたは一部をカバーするように、各レーダ5をその水平軸上で傾斜させることを提案する。
【0052】
好ましい(但し、限定しない)実施形態によると、各レーダ5は、陸上車両等の、地上で移動する物体であって風力タービン1の翼板との衝突の危険性を有しない物体により生成される影を回避するために、パイロン6上のある高さに配置されてよい。この高度はまた、地面、レベルの不均一性、または検出に混乱を生じさせる他の障害物無しに、各レーダ5のビームのカバー範囲が得られるようにする。
【0053】
レーダ5の高度はすぐ近くに位置する別の風力タービン上への設置を含んでもよいということに留意されたい。
【0054】
最後に、各レーダ5は、風力タービン1の前におよびその向こうに、そしてその翼板の回転の球4の前におよびその向こうに位置するターゲットを検出するために、そのビームの高さおよび波列のパルス幅に依存して、地面上の適切な距離に置かれてよい。
【0055】
図1に見られる例示的実施形態では、マスト3近くの底部に位置する球4の一部分がレーダ5によりカバーされないということに留意されたい。しかしながら、鳥または他の任意の飛行物体は、レーダ5のビームの残り部分を通過しなければこの位置へ接近できない。
【0056】
別の特徴によると、レーダ5の調整は、繰り返し周波数を増加させることおよび/またはパルス幅を縮小することを含む。特に、繰り返し周波数は、短期間にわたる検出を行うために最大値に調整される。
【0057】
レーダ5の感度はまた、重要なターゲット(すなわち、鷲、ハゲタカ、トビ、コウノトリ等の大型鳥などの所定の大きさを有するターゲット)だけを検出するように較正されてよい。この較正により、雨、霧、雪、昆虫または小型鳥等の干渉エコーも防止される。
【0058】
各レーダ5は、各風力タービン1の設置の構成に適するように独立に調整されてもよい。
【0059】
非限定的な例として、75メートルのタービン高さと、120メートルの翼板2の先端での全高と、を有する風力タービン1の場合、レーダ5は、20度の垂直ビーム高さを有し、マスト3の基部から90メートルの距離に配置される。また、レーダ5は高さ5メートルに持ち上げられて設置されてもよい。次に、ビームの上下高の中線9は水平とほぼ19°の角度をなす。
【0060】
この全検出区域が決定されると、本発明は各レーダ5により記録されるアナログ画像の処理を提案する。
【0061】
有利には、本発明は、各レーダ5の結果としての二次元アナログ画像をレーダ5毎に独立したデジタル画像に変換することを提案する。
【0062】
次に、各レーダ5の各デジタル画像に、一方では外側安全域7を適用し他方では内側安全域8を適用してレーダ5毎の安全容積を作成する。
【0063】
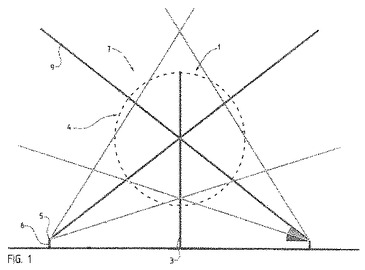
第一に、外側安全域7は二次元で現われ(特には、トロイダル形状で)、その中心は球4の中心上に配置される。その寸法は球4より大きい。
【0064】
その部分に関し、内側安全域8は同様に中心に置かれるが球4以下の寸法を有する。
【0065】
これらの安全域7と8が補間的となり外側区域7の内周が内側区域8の外周と一致するように設計されると有利である。換言すれば、各レーダ5は、各レーダ5の安全域が各レーダ5のそれぞれの安全域の和により形成される全安全域に従って互いに補完するように風力タービン1から一定の距離を置いて独立に配置される。
【0066】
この全安全域はレーダ5により掃引される全空間と一致するかあるいはそれより小さい大きさであってよいということに留意されたい。
【0067】
したがって、各レーダ5は、半パルス幅がレーダ5とこの同じレーダ5に対して定義される外側安全域7に最も近い外周との間の最短距離以下となるように較正される。
【0068】
次に、本発明はある措置をとる、特には、安全域7と8の一方の安全域でそして次に他方の安全域内で検出される動きに依存して風力タービン1の動作に関する命令を実行する。
【0069】
前に規定したように、風力タービン1の動作への介入は、タービンを完全に停止すること、次にそれを再起動すること、そして鳥が翼板2を回避できる安全速度までその翼板2の回転を減速する(特には制動により)ことを含んでよい。また、減速または停止の継続時間は区域7、8の一方または他方における鳥の検出に従ってよく、特に、減速または停止は移動が区域内で検出される限り維持される。要するに、全安全域内にいかなる物体も検出されなくなると風力タービン1の再起動が制御される。
【0070】
本発明は検出されるターゲットが実際に移動中の鳥であることを保証することができることに留意されたい。これを行うために、レーダ5は、追跡機能(「追尾」)の起動(すなわちレーダ5により感知されるエコーの足跡の検出)を含んでよい。この足跡は単純な点より、動き検出ソフトウェアにより感知される可能性が高い。
【0071】
また、追加の動作モードによると、本発明による検出方法は、風力タービン1のマスト3の脚部を通る水平対称軸上に2つのレーダ5を対向したやり方で配置することを含む。
【0072】
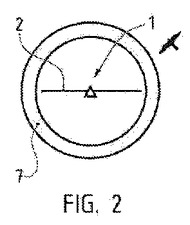
好ましくは、図2〜4に見られるように、本方法は、物体が存在しない場合(図2)の外側安全域7の基準画像を作成することと、基準画像の状態変化によって物体が外側安全域7内に検出されると(図3)風力タービン1の翼板2の動きの減速または停止を始動することと、を含む。次に、風力タービンの所望の安全速度または停止が実現されると、内側安全域の基準画像を作成し、そして新しい物体が内側安全域8(図3)内で検出される限りあるいは物体が外側安全域7内で検出される限り、風力タービン1の減速または停止は、対応する基準画像の状態変化により動きを検出するソフトウェアのおかげで両方の場合に維持される。
【0073】
上述のように、検出された動きに依存してあるいは所定の期間の最後に、内側安全域8と外側安全域7の一方および/または他方における動きの検出が無い状態で、再起動信号が風力タービン1に送信される。次に、図2にしたがって、検出システムは外側安全域7内の初期検知状態に戻る。
【0074】
他の追加の特徴によると、本発明による検出に対し、特には補間的な手段により、あるいはレーダ5の送信アンテナと受信アンテナの特徴の修正により、あるいはそうでなければ安全域7と8のリアルタイムコンピュータ処理において、加算が行われてもよい。
【0075】
特に、補間手段は、様々なパラメータ(日中/夜間、時間、季節、天候、鳥の存在の確率)に従って検出システムをプログラムすることを含んでよい。
【0076】
特定の実施形態によると、鳥が検出されるとカメラ等の写真およびビデオ記録手段をトリガするように制御してもよく、さらにその後の検査のために危険区域を通過する鳥を記録または識別することができるように制御してもよい。
【0077】
また、アンテナの特徴に対する修正は、各レーダ5のビームの上下高を増加してレーダ5を風力タービン1に近づけることを含んでもよい。この接近は検出精度を低下させる欠点を有するが、特に配線に関連する設置の期間とコストを低減する。
【0078】
上述のように、エコーの精度を上げるためにこの態様と繰り返し周波数の増加とを組み合わせてもよい。
【0079】
また、レーダ5の送信回転式アンテナのすべてまたはいくつかは一対の固定アンテナで置換されてもよく、その水平および垂直角の追加により全安全域をカバーできるようにし、送信アンテナ毎に得られる画像のマージの有無に関らず、回転手段の機械的摩耗に関連する保守管理を制限する。
【0080】
反射干渉エコーを防止するために、レーダ5により送信されるパルスを相殺的方法で同期させることも可能である。
【0081】
最後に、偏波を送信し(各レーダ5には一分極が専用に割り当てられている)、受信信号の品質を微調整し、干渉エコーとレーダ5間干渉とを低減することもまた想定される。
【0082】
別の変形は、風力タービン1の回転子の位置に依存して、安全域(特には、内側安全域8)形状および配置を自動的に変更することであってもよい。これを行うために、動作条件(特には、風の方向と強さ)に依存して回転子の位置を確認することが可能である。このとき翼板により掃引される空間はもはや球4ではなく回転楕円体となる。
【0083】
本発明による検出は、いかなるタイプの風力タービン1にも適応可能であり、その配置によりレーダ5と風力タービン1間の距離を調整することができる場合はそれらの設置状態(特に起伏)およびそれらの設置高さに基づいてよい。
【0084】
本発明はまた、時間および気候条件としたがって種の存在の確率とに依存して、巣を作る鳥または移動する鳥の存在期間におよびシステムの活動のプログラミングに影響を与える危険条件に依存して、すべての種を検出できるようにする。本システムの精密かつ調整可能な感度はまた、それらの大きさに従って種を選択できるようにする。
【0085】
また、本発明は、保護される種の存在の確率に依存して、固定的であっても、恒久的であっても、プログラム可能であってもよい。
【0086】
当然、本発明は、本発明の情況から逸脱することなく変形および修正可能な図示され説明された実施例に制限されない。
【技術分野】
【0001】
本発明は、工業敷地の近傍における鳥類種または他の飛翔動物の保護との関連で、鳥類学的分野に関する。
【背景技術】
【0002】
本発明は、エネルギー生産用の風力発電所内の鳥の検出、および発電用工業風力タービンの動翼(moving blade)と鳥が衝突するのを防止することに特定用途を見出す。
【0003】
工業風力タービンは、翼板(blade)と鳥の衝突(より正確には翼板の自由端における衝突)によってかなりの数の鳥が死亡する原因となっている。The Ligue pour la Protection des Oiseaux(LPO)(鳥類保護連盟)はこの点において、すべての種に関し、鳥の死亡が風力発電所当たり年間0.01〜36羽に達すると考えている。
【0004】
風力タービンの翼板と衝突する可能性のある大多数の小さな鳥の種(例えば、スズメ科またはアマツバメ等の無足鳥の科(the family of apodal birds))に関しては、それらの母集団の大きさが、他の死因(道路交通、電線と高架線、捕食動物(特に家畜(猫、犬等))と比較しこの衝突死亡率をごく低いものにしている。
【0005】
しかしながら、この状況は、猛禽類(鷲、ハゲタカ、トビまたは同類の鳥)または他の長距離飛行鳥種(コウノトリまたは他の鳥)等の大型種に関しては異なる。具体的には、これらの種は低生殖率の低母集団を有する。その結果、風力タービンに関連する追加の死亡はこれらの種にとって重要であり、その低減は現実の課題である。これらの種は希少で絶滅寸前であって国内および国際保護取り組みの対象であるのでなおさらそうである。
【0006】
風力タービンとの衝突による自然保護鳥種の死亡のケースについて行なわれた研究の解析によると、第一に、死亡のケースの地理的分布が多くの地球上の場所:北欧(オジロワシ)、ドイツ(アカトビ)、スコットランド(イヌワシ)、スペイン(グリフィンハゲタカ、エジプトハゲワシ、コウノトリ、ナベコウ)、アメリカ合衆国(イヌワシ)、オーストラリア(オオイヌワシ)、フランス(コウノトリ)および日本(ミサゴ)をカバーすることを示している。
【0007】
また、これらの種は回転風力タービンに直面しても絶大なる自信を示す(ハゲタカとトビ)。これらの種は、スコットランドで鷲がそうするように、好天候条件および低視界の両方において、翼板により掃引される空間内に飛び込む可能性がある。ある種(アカトビ、イヌワシ、オジロワシ)は、翼板と衝突した他の鳥類の死骸を取って食べるために風力発電所にさらに積極的に頻繁に集まる。
【0008】
また、衝突の危険は、特定の地理的特徴(起伏、露出、風条件)を通常呈する移動の主軸上でより高い。これらの特定の特徴は、熱上昇または地形性上昇の区域を形成する場所を鳥があちこちに移動し易くするので鳥類により求められる。衝突の危険はまた、鳥が多く集まるえさ場または生殖地近くで著しく増加する。
【0009】
衝突は翼板の先端部と鳥の体の先端部(頭、尾、羽根の端)との間で最も頻繁に発生することに留意されたい。結局のところ、風力タービンに近づけば近づくほど鳥はその端が最高200km/hの速度に達し得る翼板の回転速度を少なく予想するものと仮定される。
【0010】
自然保護種と考えられる種に関するこれらの死亡率の大きさは風力発電所の開発と利用に対するかなりの障害となり、既に米国(Altamont Pass、カリフォルニア州)とスペインにおける機械の一時的または決定的停止、鳥類学者による風力発電所の恒久的な監視(オーストラリア)、および設置プロジェクトの取り消し(ドイツ)の原因となっている。これらの停止とこれらに伴う論争が、風力発電所の開発と利用との両方の観点から、再生可能風エネルギーの開発に関連する財政投資を脅かしている。
【0011】
風力タービンの設計の適合化と希少種の生殖地である場所にそれらを設置することとの解決策は今なお余り実りあるものではない。これは一方では鳥の移動の決定と運営に関し躊躇しがちな理論的基礎のためであり、他方では時間と空間にわたるこれらの移動が種と個体に固有の動態に関連するかなりの偶然性を有するためである。
【0012】
風エネルギーの開発と生物多様性保存とを調和させるために、自然保護種との衝突の危険性が迫ると風力タービンを停止させることができる検出方法と装置が開発されている。
【0013】
最も効果的なシステムは、風力発電所を監視するために電波(すなわちレーダ:RAdio Detection And Ranging)による距離の検知および推定手段を含む。また、レーダ検出は鳥の移動(特には、鳥の渡り時の)を研究するために鳥類学者により既に広く使用されてきた。
【0014】
レーダは通常、マイクロ電磁波を送受信することにより空間内の物体の距離を検出し測定するために使用されることに留意されたい。実行形態と実際の用途は現在極めて多様であるが、最も広く用いられかつ最も経済的に手頃な装置は現在「海洋」タイプのレーダである。後者は通常、Xバンド、SバンドまたはLバンドのパルスを有するほぼ20°のビーム角度高さの回転式レーダである。これらは通常、水平面で使用される(すなわち、送信ビームの垂直角の中線は地平線と平行である)。
【0015】
実際には、レーダ電波の送信ビーム内で検知された物体は送信ビームの垂直角の中線上に投影される。検出された物体は次に二次元面内の1つまたは複数のエコーの形式で表される。
【0016】
この検出方法の大きな欠点は、物体がレーダ電波送信源から離れれば離れるほどその検出が信頼できなくなることにある。具体的には物体と送信源との距離が長くなればなるほどその結果のエコーは大きさと位置の点で不正確となる。
【0017】
上に説明したように、このようなレーダは飛行中の鳥の検出に既に使用されている。3つの検出方法が主として単一レーダによる鳥類学関連で使用されている。
【0018】
第1の方法は、地平線と平行な平面上にレーダビームの垂直角の中線を配置する。レーダの「追尾:trail」機能を使用することにより二次元の水平面上に鳥の軌道をマッピングすることが可能である。しかしながらこの技術は飛行中の鳥の高度を確認することができない。
【0019】
第2の方法は、地平線に垂直な面上にレーダビームの垂直角の中線を配置する。このとき地面に対する鳥の高度を決定することが可能であるがその軌道を確認することができない。
【0020】
最後に、最後の方法は、レーダビームの垂直角の中線を可変角度(通常は地平線に対し45°)で傾斜して配置する。理論的にはこの配置により鳥の高度と移動方向を示すことができる。しかしながら実際には、高度を決定するためにデータの数学的処理を必要とするのでこれはほとんど使用されない。また、検出空間は他の2つの検出方法のものよりも制限される。
【0021】
他のシステムは2つのレーダを組み合わせて一つは垂直位に他の一つは水平位にする。航空機と衝突する鳥の危険性を防止するのに空港で使用されるこれらのシステムは所与の空間における鳥の高度と軌道を確認することができる。しかしながら、これらは記録された軌道のそれぞれの高度を具体的に決定できず、逆もまた同様である。
【0022】
そうであるので、レーダを使用する鳥類学的研究の主目的はできるだけ遠くのできるだけ小さな種を検知することである。これを行うために、使用されるレーダは今では、主として高電力(長さが1メートルを越えたアンテナで数百キロワット)のものである。このようなレーダは複雑であり、事実上恒久的な技術者の存在を必要とし、高価である。したがってこれらは、定期的に位置を変えるために移動式であるように設計されることが多い。
【0023】
他の検出システムは、例えばドップラーレーダまたは追跡レーダ(追跡レーダシステム:Tracking Radar Systems)などのようにさらに高度である。これらは鳥の検出に使用可能であるが、そのコスト、その高度技術性、その使用限界のために、この分野での実際の用途をこれまで見出すことができていない。具体的には、追跡レーダシステムは何も無い空間を移動する飛行物体を追跡することができるが、物体が風力タービンに近い場合は動翼により撹乱される。
【0024】
上記技術と装置は、陸上または海における1つまたは複数の風力タービンの近くでの検出に使用される。しかしながら、それらの設置が最も普及したのは後者の海上関連においてである。具体的には、陸上では、水平面内の数百メートルから数キロメートルの長い範囲を有する海上レーダの検出能力は固体障害物(地面、起伏、樹木または建物)により生成される影区域(shadow zone)により著しく制限される。
【0025】
この欠点は、不透明かつ固定の視覚的障壁を通過する物体の検出を提案する米国特許出願公開第2002/0140597号によりその解決策を見出す。これを行うために、いくつかの非回転式モノスタティックレーダアンテナのネットワークが設置され、こうして測定された検出データがコンピュータ上で処理される。
【0026】
しかしながら、このようなシステムは風力タービン近くの検出に適さない。これは、一方では、風力タービンの翼板は、水平および垂直面内で同時に移動することができるが空間内の静止障壁とはみなせない物体であるからである。したがってこのようなシステムは翼板の検出を避けることができず、翼板と移動し得る他の物体とを区別することができない。また、検出角度は工業風力タービンの翼板により掃引される全領域をカバーしない。
【0027】
したがって、翼板との衝突の十分な危険の妥当性を示すために風力タービン近くの鳥または飛行物体の位置を十分な精度で検出するという課題が発生し、したがって検出は、翼板の運動の制動および/または停止とを自動的に引き起こす必要がある。したがってこの検出は、風向きおよびしたがって翼板の回転の位置に関係なく、翼板により掃引される球から最大で数メートルの三次元空間内で実行されなければならない。
【0028】
上述のようにレーダにより鳥を検出するシステムは鳥または他の任意の飛行物体の運動の研究に広く使用されているが、これらは手頃でかつ耐えられるコストでこの目的を満たすために必要かつ十分な特徴を有しない。これは、このようなシステムは一方では風力タービン等の別の移動物体近くの三次元内に同一の物体を忠実に配置する能力の欠如に悩まされ、他方ではその検出精度が距離とともに低下するレーダ電波の物理的偶発性にさらには環境偶発性(物理的障害物と起伏)に悩まされるためである。
【0029】
しかしながら、飛行物体が十分に近い(すなわち、翼板から最大で数十メートルの)場合に物体の衝突を防止するために風力タービンの減速または全停止を制御するために、風力タービン(その翼板は動いている)近くの飛行物体を検出するための解決策が考案されている。このような解決策は、風力タービンのタービン上の、マスト上の、あるいは翼板の回転中心から定められた距離の翼板上のナセル(nacelle)に取り付けられた超音波検出器を使用することによる飛翔物(特にはコウモリ)の検出を提案するDE 10 2005 046860号に記載されている。
【0030】
しかしながら鳥は超音波をほとんど放射しないまたは全く放射しないので、鳥を検出することは大いに制限される。この特許文書は超音波検出器の代わりにレーダを使用することを想定するが、それらがどのように働くかそしてこのような検出システムの特徴について全く規定してない。
【0031】
風力タービン近くで飛行中の物体を検出するための他の技術は、赤外線検出器またはサーマルカメラを利用する。しかしながら従来技術では、これらのシステムは、風力タービン近くの鳥の移動を記録することができるだけであり翼板と鳥の衝突を予想することができない。また、これらのシステムはまた、同一の風力タービンの翼板により掃引される空間の全体より小さな検出領域を有する。したがって風力タービンを停止するためのシステムと組み合わせても、これらは衝突を効果的に防止することができない。
【0032】
最後に、風力タービンに飛び込む物体を検出するための衝突音検出システムがある。しかしながら本来、これらのシステムは衝突を記録するがそれらを防止することができない。
【0033】
同様に、鳥または飛行物体が風力タービンから十分に遠くに移動した後の風力タービンの再起動を制御できるシステムは存在しない。この情況でのレーダの適用の難しさは、ある風力発電所(特には、オーストラリアの)において鳥類学者が、風力タービンの開始と停止を手動で制御することにより衝突による死亡を防止するために、希少で絶滅の危機に瀕したある種の運動を視覚的に連続的に監視するようなものである。
【発明の概要】
【発明が解決しようとする課題】
【0034】
したがって公知の検知装置は十分な満足を与えない。本発明の目的は、工業風力タービンの利用の関連ではその実施コストが依然として手頃でかつ耐えられるものである適切で標準化され自動化された検出制御装置を提案することにより従来技術の欠点を緩和することである。本発明はまた、天候に関係なく、日中および夜間の両方で、変わり得る大きさと形態の鳥類を検出するという利点を提供する。
【課題を解決するための手段】
【0035】
現在使用されている方法とは違って、本発明の目的は、単一の風力タービンの直周囲、および風力タービンの翼板により掃引される容積(すなわち、タービンを中心とする球の容積)により形成される危険区域だけを監視することである。この球は風力タービンの翼板の遠端部の回転円を表し、タービンの垂直回転軸を中心に回転するように設定される。
【0036】
これを行うために、本発明は、第一に、物体が存在しない場合に環境の基準コンピュータ画像を生成することにより、そして物体が監視空間に入った後この基準画像の状態変化を解析することにより、単一の風力タービンの極近傍に入る物体の移動を検出することを提案する。
【0037】
本発明は、回転翼により掃引される球に対応する危険区域に同じ手法を適用することを提案する。したがって、「周囲」と「危険区域」はレーダの全検出領域のうちの2つの区域:特定区域と補間的区域、であると理解される。
【0038】
また、本発明の意味するところの検出は3次元結果を有する二次元安全域を想定する。具体的には、二次元レーダ像上の安全域の生成はレーダの従来の機能である。次に、物体または安全域内の運動の検出はある措置を引き起こす(通常は警報)。上記システムは、二次元画像内の安全域を検出するための検出特性だけを使用する。換言すれば、逆の能力を明示的かつ具体的に使用するシステムは存在しない、すなわち、二次元で生成された安全域は、レーダにより送信された波ビームの水平角と垂直角が知られている場合に三次元容積を理論的に定義できるようにする。このときこの容積の境界線はレーダにより送信される波ビームの垂直角の中線に垂直な投射であってこの同じ中線上に定義される二次元境界線の同じビームの三次元の外側境界線上への投射である。
【0039】
したがって、本発明の目的は、広く利用される「海洋」タイプのレーダの技術に基づき標準化され自動化された技術の装置を定義することである。本装置は地上ベースの工業風力タービンの利用の関連では手頃でかつ耐えられるコストを有する一方で、風力タービンの大きさおよび空間内の翼板の位置に関係なく、工業風力タービンの動翼に十分に近い(すなわち、動翼から数メートルの)空中を飛行中の少なくとも1羽の鳥あるいは移動する他の任意の飛行物体を、その空間内の位置に関係なく、必要かつ十分な精度で検知できるようにする。また、本発明の目的は、この鳥または飛行物体の近傍が翼板と鳥または飛行物体との衝突の危険をなすように検出を判断することであり、したがって鳥または飛行物体が通り過ぎるおよび/または立ち去るまで翼板の運動の制動または停止を制御する必要がある。
【0040】
小さな鳥を検出することができるが、本発明は、その死が自然保護種の保護に関連する環境影響を与える自然保護種(大きなサイズであることが多い)の検出にその主用途を見出すであろう。また、技術的には、本発明により使用される手段は、ある大きさを越えるターゲットの検出との関連では最大許容干渉エコーを発見する。
【0041】
本発明はまた、風エネルギーの生成のための工業敷地の利用において商業的利点を提供する。
【0042】
具体的には、本発明による検出は、低コストであり、設置される場所に固定されしたがって専用化され、設置および維持するのが容易であるという利点がある。
【0043】
この目的のため、本発明は、電波手段が少なくとも1羽の鳥または他の飛行物体を検出するために使用される、少なくとも1つのレーダ形式である、単一の風力タービンに対する鳥レベルを検出する方法に関する。本方法は、
−各レーダにより風力タービンの軸方向に送信される波ビームの上下高が風力タービンの回転翼の理論掃引容積により形成される球のすべてまたは一部をカバーするように、各レーダをその水平軸上で傾斜させる工程と、
−各レーダの結果としての二次元アナログ画像をレーダ毎の独立したデジタル画像に変換する工程と、
−各レーダの各デジタル画像に、一方ではその中心が球の中心に位置しその寸法が球のものより大きい外側二次元安全域を適用し他方では球の寸法以下の寸法を有する内側安全域を適用してレーダ毎の安全容積を生成する工程と、
−各レーダの安全域が、各レーダのそれぞれの安全域の和により形成される全安全域に従って互いに補完するように、各レーダを風力タービンから一定の距離で独立に配置する工程と、
−安全域の一方または他方内で検出があった場合に、措置を取る工程と、を含む。
【0044】
本発明の他の特徴と利点は、添付図面を参照し、本発明の非限定的実施形態の以下の詳細説明から明らかになるであろう。
【図面の簡単な説明】
【0045】
【図1】本発明による検知装置の縦断面の概略図を表す。
【図2】本発明による検出方法を使用した連続的工程の概略図を表す。
【図3】本発明による検出方法を使用した連続的工程の概略図を表す。
【図4】本発明による検出方法を使用した連続的工程の概略図を表す。
【発明を実施するための形態】
【0046】
本発明は風力タービン1に対する鳥レベルを検出するためのシステムに関し、具体的には、単一の風力タービン1に対する鳥または飛行物体レベルを検出する方法に関する。
【0047】
特に、この検出は、風力タービン1の回転翼の理論掃引容積により形成される球4を含む監視空間内の鳥のいかなる侵入も検出し、このような球4への接近を検出し、次に侵入の場合には措置(特には、風力タービン1の動作への自動的介入)を想定することを提案する。
【0048】
介入は風力タービン1の翼板の回転の減速と次に必要に応じ翼板の回転の全停止とを含み得ることに留意されたい。
【0049】
これを行うために、本発明は、少なくとも1つのレーダ5(特には、2つのレーダ5)形式の電波により少なくとも1羽の鳥または他の飛行物体を検出する手段を使用することを提案する。
【0050】
具体的には、レーダ5は「海洋」タイプであってよい、すなわちそれらはXバンド、Sバンド、またはLバンド回転式レーダである。また、各レーダ5は有利には、少なくとも10度(特には20度)の垂直波ビーム高さ、10キロワット未満の電力、および長さ1メートル未満のアンテナを有することができる。
【0051】
また本発明は、各レーダ5により風力タービン1の軸方向に送信される波ビームの上下高が球4のすべてまたは一部をカバーするように、各レーダ5をその水平軸上で傾斜させることを提案する。
【0052】
好ましい(但し、限定しない)実施形態によると、各レーダ5は、陸上車両等の、地上で移動する物体であって風力タービン1の翼板との衝突の危険性を有しない物体により生成される影を回避するために、パイロン6上のある高さに配置されてよい。この高度はまた、地面、レベルの不均一性、または検出に混乱を生じさせる他の障害物無しに、各レーダ5のビームのカバー範囲が得られるようにする。
【0053】
レーダ5の高度はすぐ近くに位置する別の風力タービン上への設置を含んでもよいということに留意されたい。
【0054】
最後に、各レーダ5は、風力タービン1の前におよびその向こうに、そしてその翼板の回転の球4の前におよびその向こうに位置するターゲットを検出するために、そのビームの高さおよび波列のパルス幅に依存して、地面上の適切な距離に置かれてよい。
【0055】
図1に見られる例示的実施形態では、マスト3近くの底部に位置する球4の一部分がレーダ5によりカバーされないということに留意されたい。しかしながら、鳥または他の任意の飛行物体は、レーダ5のビームの残り部分を通過しなければこの位置へ接近できない。
【0056】
別の特徴によると、レーダ5の調整は、繰り返し周波数を増加させることおよび/またはパルス幅を縮小することを含む。特に、繰り返し周波数は、短期間にわたる検出を行うために最大値に調整される。
【0057】
レーダ5の感度はまた、重要なターゲット(すなわち、鷲、ハゲタカ、トビ、コウノトリ等の大型鳥などの所定の大きさを有するターゲット)だけを検出するように較正されてよい。この較正により、雨、霧、雪、昆虫または小型鳥等の干渉エコーも防止される。
【0058】
各レーダ5は、各風力タービン1の設置の構成に適するように独立に調整されてもよい。
【0059】
非限定的な例として、75メートルのタービン高さと、120メートルの翼板2の先端での全高と、を有する風力タービン1の場合、レーダ5は、20度の垂直ビーム高さを有し、マスト3の基部から90メートルの距離に配置される。また、レーダ5は高さ5メートルに持ち上げられて設置されてもよい。次に、ビームの上下高の中線9は水平とほぼ19°の角度をなす。
【0060】
この全検出区域が決定されると、本発明は各レーダ5により記録されるアナログ画像の処理を提案する。
【0061】
有利には、本発明は、各レーダ5の結果としての二次元アナログ画像をレーダ5毎に独立したデジタル画像に変換することを提案する。
【0062】
次に、各レーダ5の各デジタル画像に、一方では外側安全域7を適用し他方では内側安全域8を適用してレーダ5毎の安全容積を作成する。
【0063】
第一に、外側安全域7は二次元で現われ(特には、トロイダル形状で)、その中心は球4の中心上に配置される。その寸法は球4より大きい。
【0064】
その部分に関し、内側安全域8は同様に中心に置かれるが球4以下の寸法を有する。
【0065】
これらの安全域7と8が補間的となり外側区域7の内周が内側区域8の外周と一致するように設計されると有利である。換言すれば、各レーダ5は、各レーダ5の安全域が各レーダ5のそれぞれの安全域の和により形成される全安全域に従って互いに補完するように風力タービン1から一定の距離を置いて独立に配置される。
【0066】
この全安全域はレーダ5により掃引される全空間と一致するかあるいはそれより小さい大きさであってよいということに留意されたい。
【0067】
したがって、各レーダ5は、半パルス幅がレーダ5とこの同じレーダ5に対して定義される外側安全域7に最も近い外周との間の最短距離以下となるように較正される。
【0068】
次に、本発明はある措置をとる、特には、安全域7と8の一方の安全域でそして次に他方の安全域内で検出される動きに依存して風力タービン1の動作に関する命令を実行する。
【0069】
前に規定したように、風力タービン1の動作への介入は、タービンを完全に停止すること、次にそれを再起動すること、そして鳥が翼板2を回避できる安全速度までその翼板2の回転を減速する(特には制動により)ことを含んでよい。また、減速または停止の継続時間は区域7、8の一方または他方における鳥の検出に従ってよく、特に、減速または停止は移動が区域内で検出される限り維持される。要するに、全安全域内にいかなる物体も検出されなくなると風力タービン1の再起動が制御される。
【0070】
本発明は検出されるターゲットが実際に移動中の鳥であることを保証することができることに留意されたい。これを行うために、レーダ5は、追跡機能(「追尾」)の起動(すなわちレーダ5により感知されるエコーの足跡の検出)を含んでよい。この足跡は単純な点より、動き検出ソフトウェアにより感知される可能性が高い。
【0071】
また、追加の動作モードによると、本発明による検出方法は、風力タービン1のマスト3の脚部を通る水平対称軸上に2つのレーダ5を対向したやり方で配置することを含む。
【0072】
好ましくは、図2〜4に見られるように、本方法は、物体が存在しない場合(図2)の外側安全域7の基準画像を作成することと、基準画像の状態変化によって物体が外側安全域7内に検出されると(図3)風力タービン1の翼板2の動きの減速または停止を始動することと、を含む。次に、風力タービンの所望の安全速度または停止が実現されると、内側安全域の基準画像を作成し、そして新しい物体が内側安全域8(図3)内で検出される限りあるいは物体が外側安全域7内で検出される限り、風力タービン1の減速または停止は、対応する基準画像の状態変化により動きを検出するソフトウェアのおかげで両方の場合に維持される。
【0073】
上述のように、検出された動きに依存してあるいは所定の期間の最後に、内側安全域8と外側安全域7の一方および/または他方における動きの検出が無い状態で、再起動信号が風力タービン1に送信される。次に、図2にしたがって、検出システムは外側安全域7内の初期検知状態に戻る。
【0074】
他の追加の特徴によると、本発明による検出に対し、特には補間的な手段により、あるいはレーダ5の送信アンテナと受信アンテナの特徴の修正により、あるいはそうでなければ安全域7と8のリアルタイムコンピュータ処理において、加算が行われてもよい。
【0075】
特に、補間手段は、様々なパラメータ(日中/夜間、時間、季節、天候、鳥の存在の確率)に従って検出システムをプログラムすることを含んでよい。
【0076】
特定の実施形態によると、鳥が検出されるとカメラ等の写真およびビデオ記録手段をトリガするように制御してもよく、さらにその後の検査のために危険区域を通過する鳥を記録または識別することができるように制御してもよい。
【0077】
また、アンテナの特徴に対する修正は、各レーダ5のビームの上下高を増加してレーダ5を風力タービン1に近づけることを含んでもよい。この接近は検出精度を低下させる欠点を有するが、特に配線に関連する設置の期間とコストを低減する。
【0078】
上述のように、エコーの精度を上げるためにこの態様と繰り返し周波数の増加とを組み合わせてもよい。
【0079】
また、レーダ5の送信回転式アンテナのすべてまたはいくつかは一対の固定アンテナで置換されてもよく、その水平および垂直角の追加により全安全域をカバーできるようにし、送信アンテナ毎に得られる画像のマージの有無に関らず、回転手段の機械的摩耗に関連する保守管理を制限する。
【0080】
反射干渉エコーを防止するために、レーダ5により送信されるパルスを相殺的方法で同期させることも可能である。
【0081】
最後に、偏波を送信し(各レーダ5には一分極が専用に割り当てられている)、受信信号の品質を微調整し、干渉エコーとレーダ5間干渉とを低減することもまた想定される。
【0082】
別の変形は、風力タービン1の回転子の位置に依存して、安全域(特には、内側安全域8)形状および配置を自動的に変更することであってもよい。これを行うために、動作条件(特には、風の方向と強さ)に依存して回転子の位置を確認することが可能である。このとき翼板により掃引される空間はもはや球4ではなく回転楕円体となる。
【0083】
本発明による検出は、いかなるタイプの風力タービン1にも適応可能であり、その配置によりレーダ5と風力タービン1間の距離を調整することができる場合はそれらの設置状態(特に起伏)およびそれらの設置高さに基づいてよい。
【0084】
本発明はまた、時間および気候条件としたがって種の存在の確率とに依存して、巣を作る鳥または移動する鳥の存在期間におよびシステムの活動のプログラミングに影響を与える危険条件に依存して、すべての種を検出できるようにする。本システムの精密かつ調整可能な感度はまた、それらの大きさに従って種を選択できるようにする。
【0085】
また、本発明は、保護される種の存在の確率に依存して、固定的であっても、恒久的であっても、プログラム可能であってもよい。
【0086】
当然、本発明は、本発明の情況から逸脱することなく変形および修正可能な図示され説明された実施例に制限されない。
【特許請求の範囲】
【請求項1】
電波手段が少なくとも1羽の鳥または他の飛行物体を検出するために使用される、少なくとも1つのレーダ(5)形式の、単一の風力タービン(1)に対する前記鳥または飛行物体レベルを検出する方法であって、
−前記各レーダ(5)により前記風力タービン(1)の軸方向に送信される波ビーム(9)の上下高が前記風力タービン(1)の回転翼(2)の理論掃引容積により形成される球(4)のすべてまたは一部をカバーするように、前記各レーダ(5)をその水平軸上で傾斜させる工程と、
−前記各レーダ(5)の結果としての二次元アナログ画像を前記レーダ(5)毎の独立したデジタル画像に変換する工程と、
−前記各レーダ(5)の各デジタル画像に、一方ではその中心が前記球(4)の中心に位置しその寸法が前記球(4)より大きい外側二次元安全域(7)を適用し、他方では前記球(4)の寸法以下の寸法を有する内側安全域(8)を適用して前記各レーダ(5)の安全容積を生成する工程と、
−前記各レーダ(5)の前記安全域(7,8)が前記レーダ(5)の前記それぞれの安全域(7,8)の和により形成される全安全域に従って互いに補完するように、前記各レーダ(5)を前記風力タービン(1)から一定の距離に独立に配置する工程と、
−前記安全域(7,8)の一方または他方内で検出があった場合に措置を取る工程と、を含む、方法。
【請求項2】
前記風力タービン(1)のマスト(3)の脚部を通る水平対称軸上に2つのレーダ(5)を対向したやり方で配置する工程を含むことを特徴とする請求項1に記載の検出方法。
【請求項3】
パイロン(6)上のある高さに前記各レーダ(5)を配置する工程を含むことを特徴とする請求項1または2に記載の検出方法。
【請求項4】
前記措置は、
−物体が前記安全域(7、8)において検出されたときに前記安全域(7、8)の一方および/または他方内で検出される動きに依存して、前記風力タービン(1)の前記動作を制御する、特には制動または停止する、ことと、次に、
−前記安全域内でいかなる物体も検出されないときに前記風力タービン(1)の再起動を制御することと、を含むことを特徴とする請求項1〜3のいずれか一項に記載の検出方法。
【請求項5】
−物体が存在しない場合に前記外側安全域(7)の基準画像を作成する工程と、
−物体が検出されると前記風力タービン(1)の減速または停止を始動する工程と、
−前記風力タービン翼板の動きの安全速度または停止が実現されると、前記内側安全域(8)の基準画像を作成する工程と、
−新しい物体が前記内側安全域(8)において検出される限り前記風力タービン(1)の前記停止を維持する工程と、
−物体が前記外側安全域(7)において検出される限り前記風力タービン(1)を停止したままにする工程と、を含むことを特徴とする請求項1〜4のいずれか一項に記載の検出方法。
【請求項6】
前記レーダ(5)には「海洋」タイプのレーダ、Xバンド、SバンドまたはLバンドの回転式レーダタイプのレーダあるいはそうでなければ一対の固定アンテナのレーダを使用する工程を含むことを特徴とする請求項1〜5のいずれか一項に記載の検出方法。
【請求項7】
前記レーダ(5)の前記調整は前記各レーダ(5)の半パルス長が前記レーダ(5)と前記レーダ(5)の前記外側安全域(7)の外周との間の最短距離以下となるようにパルス長を低減することを含む、ことを特徴とする請求項1〜6のいずれか一項に記載の検出方法。
【請求項8】
様々なパラメータ:日中/夜間、時間、季節、天候、または鳥の存在の確率、に基づいて検出システムのプログラミングの形式で追加の測定を行う工程を含むことを特徴とする請求項1〜7のいずれか一項に記載の検出方法。
【請求項9】
前記風力タービン(1)の回転子の位置に依存して自動的に前記安全域(7、8)の形状と配置を変える工程を含むことを特徴とする請求項1〜8のいずれか一項に記載の検出方法。
【請求項10】
偏波を送信する工程を含むことを特徴とする請求項1〜9のいずれか一項に記載の検出方法。
【請求項1】
電波手段が少なくとも1羽の鳥または他の飛行物体を検出するために使用される、少なくとも1つのレーダ(5)形式の、単一の風力タービン(1)に対する前記鳥または飛行物体レベルを検出する方法であって、
−前記各レーダ(5)により前記風力タービン(1)の軸方向に送信される波ビーム(9)の上下高が前記風力タービン(1)の回転翼(2)の理論掃引容積により形成される球(4)のすべてまたは一部をカバーするように、前記各レーダ(5)をその水平軸上で傾斜させる工程と、
−前記各レーダ(5)の結果としての二次元アナログ画像を前記レーダ(5)毎の独立したデジタル画像に変換する工程と、
−前記各レーダ(5)の各デジタル画像に、一方ではその中心が前記球(4)の中心に位置しその寸法が前記球(4)より大きい外側二次元安全域(7)を適用し、他方では前記球(4)の寸法以下の寸法を有する内側安全域(8)を適用して前記各レーダ(5)の安全容積を生成する工程と、
−前記各レーダ(5)の前記安全域(7,8)が前記レーダ(5)の前記それぞれの安全域(7,8)の和により形成される全安全域に従って互いに補完するように、前記各レーダ(5)を前記風力タービン(1)から一定の距離に独立に配置する工程と、
−前記安全域(7,8)の一方または他方内で検出があった場合に措置を取る工程と、を含む、方法。
【請求項2】
前記風力タービン(1)のマスト(3)の脚部を通る水平対称軸上に2つのレーダ(5)を対向したやり方で配置する工程を含むことを特徴とする請求項1に記載の検出方法。
【請求項3】
パイロン(6)上のある高さに前記各レーダ(5)を配置する工程を含むことを特徴とする請求項1または2に記載の検出方法。
【請求項4】
前記措置は、
−物体が前記安全域(7、8)において検出されたときに前記安全域(7、8)の一方および/または他方内で検出される動きに依存して、前記風力タービン(1)の前記動作を制御する、特には制動または停止する、ことと、次に、
−前記安全域内でいかなる物体も検出されないときに前記風力タービン(1)の再起動を制御することと、を含むことを特徴とする請求項1〜3のいずれか一項に記載の検出方法。
【請求項5】
−物体が存在しない場合に前記外側安全域(7)の基準画像を作成する工程と、
−物体が検出されると前記風力タービン(1)の減速または停止を始動する工程と、
−前記風力タービン翼板の動きの安全速度または停止が実現されると、前記内側安全域(8)の基準画像を作成する工程と、
−新しい物体が前記内側安全域(8)において検出される限り前記風力タービン(1)の前記停止を維持する工程と、
−物体が前記外側安全域(7)において検出される限り前記風力タービン(1)を停止したままにする工程と、を含むことを特徴とする請求項1〜4のいずれか一項に記載の検出方法。
【請求項6】
前記レーダ(5)には「海洋」タイプのレーダ、Xバンド、SバンドまたはLバンドの回転式レーダタイプのレーダあるいはそうでなければ一対の固定アンテナのレーダを使用する工程を含むことを特徴とする請求項1〜5のいずれか一項に記載の検出方法。
【請求項7】
前記レーダ(5)の前記調整は前記各レーダ(5)の半パルス長が前記レーダ(5)と前記レーダ(5)の前記外側安全域(7)の外周との間の最短距離以下となるようにパルス長を低減することを含む、ことを特徴とする請求項1〜6のいずれか一項に記載の検出方法。
【請求項8】
様々なパラメータ:日中/夜間、時間、季節、天候、または鳥の存在の確率、に基づいて検出システムのプログラミングの形式で追加の測定を行う工程を含むことを特徴とする請求項1〜7のいずれか一項に記載の検出方法。
【請求項9】
前記風力タービン(1)の回転子の位置に依存して自動的に前記安全域(7、8)の形状と配置を変える工程を含むことを特徴とする請求項1〜8のいずれか一項に記載の検出方法。
【請求項10】
偏波を送信する工程を含むことを特徴とする請求項1〜9のいずれか一項に記載の検出方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2012−512352(P2012−512352A)
【公表日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2011−540185(P2011−540185)
【出願日】平成21年12月16日(2009.12.16)
【国際出願番号】PCT/FR2009/052566
【国際公開番号】WO2010/076500
【国際公開日】平成22年7月8日(2010.7.8)
【出願人】(511143368)
【Fターム(参考)】
【公表日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成21年12月16日(2009.12.16)
【国際出願番号】PCT/FR2009/052566
【国際公開番号】WO2010/076500
【国際公開日】平成22年7月8日(2010.7.8)
【出願人】(511143368)
【Fターム(参考)】
[ Back to top ]