
鳥獣追跡システム
【課題】電力消費を最小限に抑えつつ、鳥獣の生息環境の即時的な把握が可能な鳥獣追跡システムを提供する。
【解決手段】鳥獣追跡システムは、鳥獣2に装着可能な鳥獣タグ3と、複数の基地局1a,1bと、データセンタ6とを備える。鳥獣タグと基地局とは、夫々の時刻取得装置に基づきビーコンの周期的な送受信の同期を取る。鳥獣タグは、いずれの基地局とも通信圏外にあるときは無線機によるビーコン受信を停止し、動き感知センサが鳥獣の静止状態を検知したときは、GPSセンサによるデータ取得周期を延長させる。また、データ取得時のみ、最小時間、GPSセンサを起動させる。なお、鳥獣タグが通信圏外にあり、かつ、鳥獣タグメモリが満杯であるときは、保存された位置データを時間均等に間引くとともに、GPSセンサによるデータ取得周期も間引間隔に併せて延長させることが好ましい。
【解決手段】鳥獣追跡システムは、鳥獣2に装着可能な鳥獣タグ3と、複数の基地局1a,1bと、データセンタ6とを備える。鳥獣タグと基地局とは、夫々の時刻取得装置に基づきビーコンの周期的な送受信の同期を取る。鳥獣タグは、いずれの基地局とも通信圏外にあるときは無線機によるビーコン受信を停止し、動き感知センサが鳥獣の静止状態を検知したときは、GPSセンサによるデータ取得周期を延長させる。また、データ取得時のみ、最小時間、GPSセンサを起動させる。なお、鳥獣タグが通信圏外にあり、かつ、鳥獣タグメモリが満杯であるときは、保存された位置データを時間均等に間引くとともに、GPSセンサによるデータ取得周期も間引間隔に併せて延長させることが好ましい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は鳥獣追跡システムに関し、特に、GPSセンサ等の時刻取得装置を搭載した複数の基地局と省電力技術とを利用して鳥獣の生息環境を即時把握する鳥獣追跡システムに関するものである。
【背景技術】
【0002】
従来、野生鳥獣や希少動物の行動把握や生息環境調査のために、鳥獣に装着する小型電波発信機を用いた行動追跡が行われている。しかしながら、これらの追跡調査は生物学者など特定の人々による観察対象、目的、範囲、時期等の追跡条件が限定されたものであり、自然環境をボランティアなどの一般人の参画も含め、国土レベルの広範なエリアを対象に持続的にモニタリングするような取り組みやそれをサポートするシステムは見られない。
【0003】
ところで、生物多様性保全、自然再生に関する我が国の代表的な取り組みのひとつに、新潟県佐渡島における朱鷺(トキ)放鳥がある。トキの行動追跡のために、現状、非特許文献1に示すようなGPS(全地球測位システム)と衛星回線とを用いたテレメトリングが利用されているが、以下に示すように即時的な位置把握が困難であり、トキの追跡に多大の人手を要しているのが現状である。
【0004】
この現状のトキ追跡システムでは、位置情報データの中継に高度850kmにある気象観測衛星を利用するため、発信機と衛星との通信距離や発信機における所要送信電力が大きくなり、バッテリ節約のため位置情報の送信頻度を3〜10日に1回程度に制限する必要がある。また、鳥獣の位置によっては、衛星経由の通信品質に支障が生じてしまう場合もある。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】“アルゴス(ARGOS)”、[online]、株式会社 キュービック・アイ、[平成22年2月16日検索]、インターネット<URL:http://www.cubic-i.co.jp/index.html>
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、このような従来の実情に鑑みて提案されたものであり、野生鳥獣に装着させる無線タグ(以下、「鳥獣タグ」と呼ぶ。)の電力消費を最小限に抑えつつ、野生鳥獣の行動や生息環境の即時的な把握が可能な鳥獣追跡システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明者は、従来の人工衛星依存の追跡システムから脱却すること、具体的には、地上にGPSセンサ等の時刻取得装置を搭載した複数のデータ受信基地局を配備し、これらの基地局と鳥獣タグとの間での通信を効率的に行わせることで、電力消費を大幅に抑制可能になるとともに、鳥獣行動の即時的な把握が可能になることを見出し、本発明を完成するに至った。
【0008】
すなわち、本発明は、鳥獣に装着可能な鳥獣タグと、複数の基地局と、データセンタと、を備えた鳥獣追跡システムであって、
前記基地局は、前記鳥獣タグに向けてビーコンを周期的に送信する無線機と、前記基地局に関する時刻を少なくとも取得する時刻取得装置と、前記鳥獣タグ、前記時刻取得装置、及び前記データセンタから送信された情報を一時的に保存する基地局メモリと、前記データセンタとインターネットを介して通信を行うネットワーク接続装置と、前記無線機、前記時刻取得装置、前記基地局メモリ、及び前記ネットワーク接続装置の動作を制御する処理装置と、を備え、
前記鳥獣タグは、人工衛星から前記鳥獣タグの位置及び時刻を含んだGPSデータを取得するGPSセンサと、前記GPSデータを一時的に保存する鳥獣タグメモリと、前記ビーコンや前記GPSデータを前記基地局の各々と通信可能な無線機と、前記鳥獣の加速度を検知する動き感知センサと、前記GPSセンサ、前記無線機、及び前記鳥獣タグメモリの動作を制御しかつ周期的に起動する処理装置と、を備え、
前記鳥獣タグと前記基地局とは、前記GPSセンサと前記時刻取得手段とに基づき前記ビーコンの周期的な送受信の同期を取り、
前記鳥獣タグの前記GPSセンサは、前記処理装置の起動時のみ起動して前記GPSデータを周期的に取得し、
前記鳥獣タグの前記ビーコン受信周期と前記GPSセンサの前記GPSデータ取得周期との同期が取れていることを特徴とするものである。
【発明の効果】
【0009】
本発明の鳥獣追跡システムは、人工衛星に依存した従来の鳥獣追跡方式から脱却し、地上に複数のデータ受信基地局及びこれらの基地局とデータセンタとを接続するアクセスネットワークを配備し、かつ、省電力化技術をふんだんに採用しているために、即時的な鳥獣位置の把握が可能となる。具体的には、上空約850kmにある人工衛星を経由し、消費電力(空中線)が約1Wを要して情報送信する従来システムでは3〜10日分に一度の頻度での測定に甘んじているが、本発明のシステムでは、モニタリングの為の主要な通信を鳥獣に付された鳥獣タグと基地局との間の通信距離内(10km以下)で行い、消費電力が0.01W以下に抑制できるため、数分毎に鳥獣位置を把握することが可能になる。
【0010】
また、本発明のシステムでは、データセンタにおいて、電波環境等によって左右し得る各基地局の通信圏に関する情報を常に解析・更新し、全ての基地局の通信圏情報を各基地局に送信するため、鳥獣タグは、最新の通信圏情報を基にデータを送受信し、通信圏外でのメモリの保存・省電力化を実現することができる。
【0011】
また、本発明のシステムでは、鳥獣が基地局の通信圏外に出ても、その後いずれかの基地局の通信圏内に進入する際に、通信圏外のおける鳥獣の行動を把握可能である。また、通信圏内であっても電波の届きにくい場所に鳥獣が移動したとしても、鳥獣が当該場所への入る直前の情報を把握することにより、通信圏外における鳥獣の行動を高い精度で捕捉することが可能である。
【図面の簡単な説明】
【0012】
【図1】本発明に係る鳥獣追跡システムの構成の概略を示した図である。
【図2】本発明に係る鳥獣タグのハードウェア構成を示すブロック図である。
【図3】鳥獣タグにおける処理装置及びGPSセンサの起動制御方法を示した図である。
【図4】本発明に係る基地局及びデータセンタのハードウェア構成を示すブロック図である。
【図5】本発明の鳥獣追跡システムの動作の一部を示すシーケンス図である。
【図6】鳥獣タグにおけるGPSデータ取得周期とビーコン周期との関係を示した図である。
【図7】間引きモード処理の各ステップを示したフローチャートである。
【図8】データ保存領域での間引きモード処理時のデータ処理方法を示した図である。
【発明を実施するための形態】
【0013】
以下、本発明に係る野生鳥獣行動追跡システムを図面に示す実施の形態に基づき説明するが、本発明は、下記の具体的な実施形態に何等限定されるものではない。
【0014】
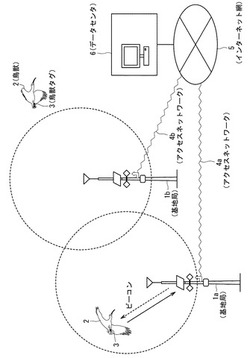
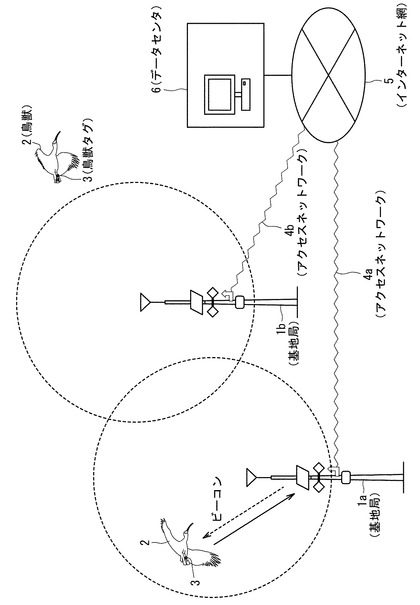
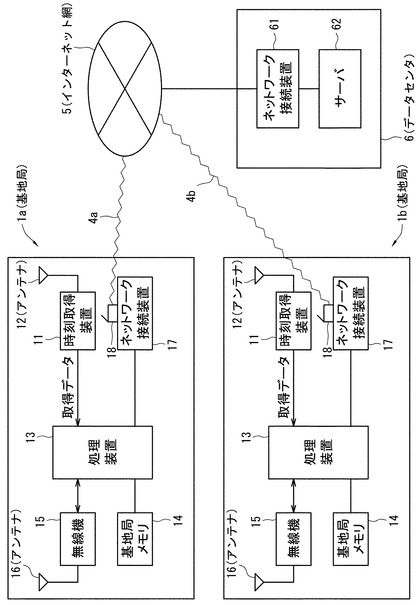
図1は、本発明に係る鳥獣追跡システムの構成の概略を示した図である。本発明の鳥獣追跡システムは、図1に示すように、鳥獣2に装着する鳥獣タグ3と、この鳥獣タグ3から発信されるGPSデータを受信する複数の基地局1a,1bと、これらの基地局1a,1bとインターネット網5とを接続するアクセスネットワーク4a,4bと、アクセスネットワーク4a,4b及びインターネット網5を介して複数の基地局1a,1bからの情報を収集・蓄積・解析するデータセンタ6とから構成される。
【0015】
従来の行動追跡方式にも複数の基地局を利用するものはあるが、本発明では各基地局1a,1bが現在時刻を取得する時刻取得装置11を備え、他の基地局及びデータセンタ6と連携して鳥獣タグ3との通信の省電力化及び高精度化を実現するよう高度な制御方式を実現する点に本発明の特徴がある。さらに、移動中(例えば飛翔中)の鳥獣2(例えば、トキ)の常時捕捉ができる点も独特である。また、鳥獣2が森の中など電波が届きにくい場所に着地したとしても、着地直前と飛翔直後とに測定したデータから着地時を捕捉するため、高精度な位置把握が可能である。
【0016】
なお、基地局1a,1bの時刻取得装置11は、現在時刻を取得できる装置があれば特に限定されないが、例えば、鳥獣タグ3に用いられるようなGPSセンサを適用してもよい。ここで、GPSセンサは、現在日時や、鳥獣タグの緯度、経度、高度等の位置データ(以下、GPSデータと呼ぶ。)を測定でき、かつ、上記各種のデータ取得タイミングが鳥獣タグ外部から設定できるものが好ましい。
【0017】
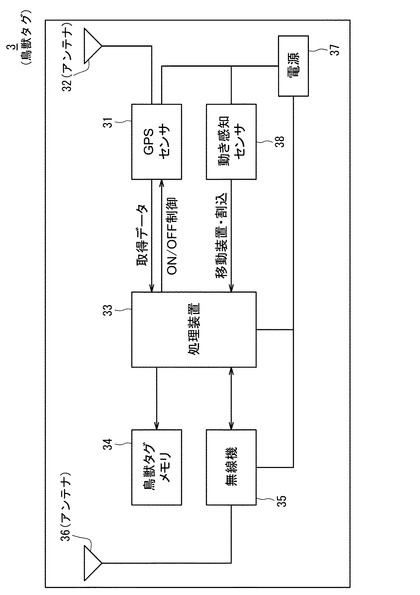
図2は、鳥獣タグ3のハードウェア構成を示すブロック図である。図2において、GPSセンサ31は、アンテナ32を介して図示しない人工衛星からの電波を受信し、鳥獣タグ3(つまり鳥獣タグ3が搭載された鳥獣2)の位置等のデータを取得し、この取得データをCPU等の処理装置33に送る。処理装置33に送られた取得データは逐次、メモリ34(以下、鳥獣タグメモリと呼ぶ)に蓄積される。鳥獣2が基地局1a,1bのいずれかの通信圏内にいれば(又は入れば)、無線機35が作動し、鳥獣タグメモリ34に蓄積されていたデータを処理装置33、無線機34を介してアンテナ36から基地局1a,1bに送信する。また、鳥獣タグ3内の各要素に電力を供給する電源37は小型化・軽量化された電源を利用することが好ましい。具体的には、鳥獣タグ3の重さは、これが装着される鳥獣2の動きに支障がないよう50グラム以下が好ましく、30グラム以下がさらに好ましい。このように小型化・軽量化された電源37であっても、以下詳述する省電力化技術の採用により鳥獣2行動の即時把握を充分に実現可能である。また、各基地局1a,1bと鳥獣タグ3との間の通信は、例えば、429MHz帯の特定小電力無線設備を利用して実現してもよい。
【0018】
鳥獣タグ3は、さらに動き感知センサ38を備える。動き感知センサ38の一例として、加速度センサ(好ましくは、鳥獣タグ3のX軸、Y軸、及びZ軸の加速度を検知できる加速度センサ)が挙げられる。また、鳥獣タグ3は、鳥獣タグ3付近の気圧を検知する気圧センサ(図示せず)を備えていてもよい。
【0019】
動き感知センサ38は、鳥獣3の移動又は静止(例えば、飛翔中又は静止)を検知し、処理装置33に割込動作を行う。鳥獣2が移動中であると動き感知センサ38が検知した際には、処理装置33は、割込起動されて短周期測定状態に入った状態になり、GPSセンサ31も短周期測定状態になるよう制御する。一方、鳥獣2が静止中であると動き感知センサ38が検知した際には、処理装置33は、割込起動されて長周期測定状態つまり電力消費抑制状態になり、GPSセンサ31も長周期測定状態になるよう制御する。処理装置33はGPS測位を行う時間のみ処理装置33、GPSセンサ31を起動状態(ON状態)とし、その他の時間は処理装置33、GPSセンサ31をスリープ状態(OFF状態)とする。これにより鳥獣タグ3の電力消費を抑制することが可能となる。
【0020】
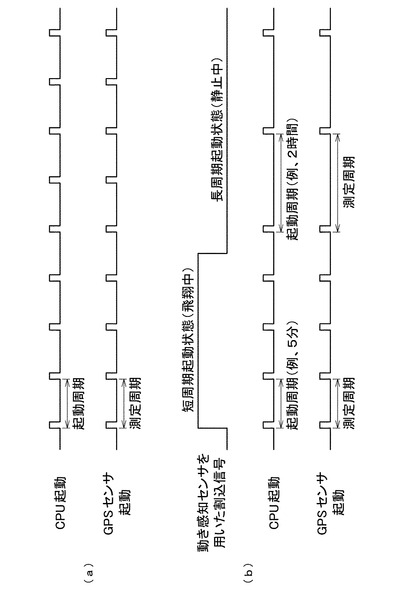
次に、鳥獣タグ3における処理装置33及びGPSセンサ31の起動制御について説明する。本発明では、「周期起動」と「動き感知センサ起動」との大きく二つの方法を利用する。まず、周期起動制御は、図3(a)に示すように、処理装置33やGPSセンサ31を常時起動させておくのではなく、ある時間だけ周期的に起動・測定状態におく方法である。これにより、鳥獣2の移動状態に応じて、鳥獣タグ3の電力消費を抑制することができる。
【0021】
動き感知センサ起動制御は、図3(b)に示すように、動き感知センサ38の起動信号(割込信号)がONになっている間(つまり鳥獣2が飛翔中の期間)、処理装置33及びGPSセンサ31の起動周期を比較的小さな値(例えば、5分間)に設定する一方、動き感知センサ38の起動信号がOFFになっている間(つまり鳥獣2が静止中の期間)、上記起動周期を比較的大きな値(例えば、2時間)に設定するものである。これにより、鳥獣2の飛翔中は、GPSセンサ31でのデータ取得を比較的頻繁に行う短周期起動状態におき、鳥獣2の静止中は、GPSセンサ31のデータ取得(すなわち電力消費)を抑制する長周期起動状態に設定することができる。
【0022】
図4は、基地局1a,1b及びデータセンタ6のハードウェアの構成を示したブロック図である。各基地局1a,1bは、処理装置13と、時刻取得装置11と,基地局メモリ14と、無線機15と、アンテナ12,16と、ネットワーク接続装置17とを備える。無線機15は、アンテナ16を介して、通信圏内に生息する鳥獣タグ3にビーコンを送出するとともに、鳥獣タグ3からの電波を受信し、この受信した情報を基地局メモリ14に保存する。また、時刻取得装置11は、ある時刻における基地局1a,1bの位置情報を得たり、鳥獣タグ3から受信したデータに受信時刻を付与したり、ビーコン信号の周期的送信に必要な現在時刻を取得するために基地局1a,1bに搭載されている。具体的には、時刻取得装置11は、アンテナ12を介して人工衛星から電波を受信した基地局1a,1bの位置データを基地局メモリ14に蓄積するよう処理装置13に送信したり、アンテナ16及び無線機15を介して受信された鳥獣タグ3のデータに受信時刻を付与したりする。この処理装置13と無線機15との間の通信は、例えば、RS−232Cを利用してもよい。
【0023】
本発明の鳥獣追跡システムでは、全ての基地局1a,1bが同一のタイミングでビーコンの送信(送出)を行うことを前提としている。このため、隣接する基地局(例えば、1a,1b)の通信圏が重なる領域(図1において、二つの円(破線)の重複領域)に鳥獣2が移動した場合には、これらの基地局1a,1bから送出されたビーコンが鳥獣タグ3において衝突する恐れがある。このような問題を改善する方法の一つとして、各基地局1a,1bでのビーコン送出を毎回周期的に行うのではなく、確率的な方法を利用して周期的かつ確率的に行うこと(以下、「確率周期送信」と呼ぶ)が挙げられる。例えば、二つの基地局1a,1bだけが隣接しているような場合、各基地局1a,1bが、ビーコン送信周期毎に通常行われるビーコン送信のうち50%程度の頻度だけランダムに送信が行われるように設定する(つまり、ビーコン送出の確率を0.5に設定)。このような確率周期送信制御を用いれば、上述の衝突の問題は大幅に改善される。
【0024】
上記のようなビーコンの確率周期送信制御を基地局1a,1bが採用した場合、鳥獣タグ3は、ビーコンの受信が途絶えた際、鳥獣2が基地局1a,1bの通信圏の外へ移動したためか、確率周期送信制御のためにビーコン自体が基地局1a,1bから送信されなかったのか、のいずれの状況であるのか判定できないことも予測される。そこで、鳥獣タグ3には基地局1a,1bからのビーコン送信周期の基本情報を予め記憶させておき、ビーコンの受信履歴に基づいて通信圏の内外を判定させることが好ましい。
【0025】
なお、上述の確率を1未満に設定すれば、ビーコン送出は確率周期送信制御になり、確率を1に設定すれば、上述した通常の周期的送信制御になる。以下に示す本発明の実施形態(例えば、図5に示す本発明の鳥獣追跡システムの動作)については、通常の周期的送信制御に基づいて説明を行っている。
【0026】
また、ネットワーク接続装置17には高速データ通信カード18が設けられており、インターネット網5を介して基地局1a,1bとデータセンタ6とを接続するアクセスネットワーク4a,4bの構築に寄与する。このアクセスネットワーク4a,4bには電気通信事業者が提供する携帯電話サービス(例えば、FOMA網によるパケット通信)を利用することができる。各基地局1a,1bのネットワーク接続装置17は、処理装置13に接続されており、基地局メモリ14に蓄積された鳥獣タグ3や基地局1a,1bに関するデータをデータセンタ6に送信するとともに、データセンタ6において解析・推定された全ての基地局1a,1bの通信圏情報とバージョン値を受信し、基地局メモリ14に蓄積させる。
【0027】
データセンタ6は、インターネット網5に接続するネットワーク接続装置61とサーバ62とを備え、各基地局1a,1bの各ネットワーク接続装置17からの情報をサーバ62に蓄積し、図示しない解析・演算部において各鳥獣2の移動履歴と各基地局1a,1bの通信圏情報を更新し、図示しない表示部において各鳥獣2の移動位置や移動履歴等を表示する。基地局1a,1bは、鳥獣タグ3からGPSデータを受信する際にその受信時刻を記録し、その後、GPSデータと基地局受信時刻とをデータセンタ6に送る。データセンタ6では、各鳥獣タグ3によって収集したGPSデータ及びGPS取得時刻と、基地局1a,1bで受信した時刻とを基に、各基地局1a,1bと通信可能な地点及び通信不可能な地点を表示部の3次元マップ上に記録する。データセンタ6は全ての基地局1a,1bの通信圏情報とバージョン値とを定期的(例えば1週間に1回)各基地局1a,1bへ送る。
【0028】
通信圏情報とバージョン値の定義及びこれらの具体的な作成方法については、以下に述べる通りである。鳥獣タグ3のGPSデータに含まれる時刻データと基地局1a,1bにてそのGPSデータを受信したときの時刻を比較すると、GPSデータの取得地点が基地局1a,1bと通信可能か否かの情報を得ることができる。すなわち取得したGPSデータが一定時間内で受信されれば、その地点が基地局1a,1bと通信可能であることがわかる。遅延が一定時間以上であれば、通信ができず鳥獣タグメモリ34に一定時間保存された後に、受信されたデータであることがわかる。基地局1a,1bに受信される個々のGPSデータ取得地点と基地局1a,1bとの通信可否とを、基地局1a,1bを中心とするマップ上に高度別に表示する。基地局1a,1bを中心に通信可能な領域と通信不可能な領域の境目を閉曲線で結ぶ。この閉曲線を「通信圏」と呼ぶことにする。電波の状況などにより通信可能な領域と通信不可能な領域の境目が明確でない場合もあるが、統計処理的な方法(例えば通信可能性が50%程度以上であれば通信圏内とする)により境目を特定する。通信可能距離は鳥獣タグが上空になり、基地局1a,1bとの見通しが確保できると通信圏が大きくなるので、通信圏を高度別に求め、最大通信圏を求める。これを「通信圏情報」と呼ぶ。各基地局1a,1bの通信圏情報の推定処理はデータセンタで行う。通信圏の情報は鳥獣タグ3の位置推定や省電力化に有用である。
【0029】
通信圏情報は鳥獣タグ3からのGPSデータ数が増えると通信圏情報の推定精度が向上する。また、基地局1a,1bを増やした場合は新たな通信圏情報が必要になる。そこで、データセンタ6では一定期間ごとに各基地局1a,1bの通信圏情報を更新するものとする。また、更新された通信圏情報は各基地局1a,1bへダウンロードされ、基地局1a,1bから鳥獣タグ3へダウンロードされる。鳥獣タグ3はアクセスした任意の基地局1a,1bから全ての基地局1a,1bの通信圏情報をまとめてダウンロードできる。これを実現するため、データセンタでは通信圏情報を更新する度毎にそのバージョン値(「通信圏情報バージョン値」と呼ぶ)を増やし、通信圏情報に含めて各基地局1a,1bへ送る。各基地局1a,1bは通信圏情報バージョン値をビーコンに含めて送る。これを受信した鳥獣タグ3は自身が保持する通信圏情報のバージョン値と比較し、バージョンが古い場合は最新の通信圏情報を基地局1a,1bへ要求する。
【0030】
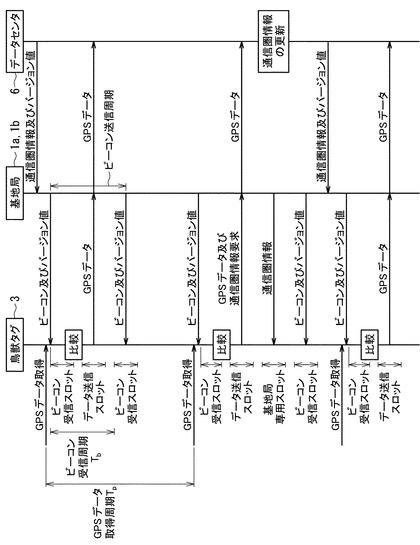
図5は、本発明の鳥獣追跡システムの動作の一部を示すシーケンス図である。データセンタ6は、基地局1a,1bの各々へ向けて、全ての基地局1a,1bの通信圏情報及びこの情報に対応した通信圏バージョン値を送信する。各基地局1a,1bはこれらの情報を基地局メモリ14に蓄積する。各基地局1a,1bにおいては、処理装置13が周期的に無線機15を起動させ、基地局1a,1bから鳥獣タグ3に向けて周期的(例えば、5分毎)にビーコンを送信する。鳥獣タグ3は、GPSデータ取得直後に、いずれかの基地局1a,1bの通信圏内にあればビーコンを受信するが、無線機35をビーコン受信のために絶えず待機させないように省電力設計されている。具体的には、基地局1a,1bからのビーコン送信周期に同期するように鳥獣タグ3のビーコン受信タイミング(以下、ビーコンスロットとも呼ぶ)が設定されている。例えば、鳥獣タグ3のビーコン受信周期が上記ビーコン送信周期と一致し、受信期間が例えばビーコン送信時から微小時間(例えば、0.2秒間)に設定されている。基地局1a,1bと鳥獣タグ3とは双方ともに、位置データとともに現在時刻を取得できる時刻取得装置11、GPSセンサ,31を備えているため、上記ビーコン送受信の同期は容易に実現可能である。
【0031】
鳥獣タグ3は、ビーコンの受信に成功したら、ランダムバックオフの後、既に蓄積していたGPSデータを基地局1a,1bに向けて送信する。言い換えれば、上記ビーコン周期の間には、ビーコン受信スロットとは別にGPSデータ送信を行なうデータ送信スロットが存在するのである。基地局1a,1bに送信された各鳥獣タグ3のGPSデータは一旦、基地局メモリ14に蓄積された後、ネットワーク接続装置17を介してデータセンタ6に送信される。なお、上記ランダムバックオフとは、複数の信号が媒体上で衝突するのを防止するため、乱数で決まる一定時間だけ待った後、媒体上の信号の検知を行い、媒体が空いていればデータを送信する処理のことであり、媒体が空いていなければ再度バックオフを行う。データ送信を同時に行う鳥獣タグ3が複数ある場合にこれらの鳥獣タグ3から基地局1a,1bへのデータ送信の衝突を回避できる。たまたま複数の鳥獣タグ3のランダムバックオフが同じ値となった場合にはデータの衝突が起こるが、その場合にはデータの再送を行う。この際、バックオフの選択範囲を2倍などに設定し、さらなら衝突の可能性を低減することが望ましい。
【0032】
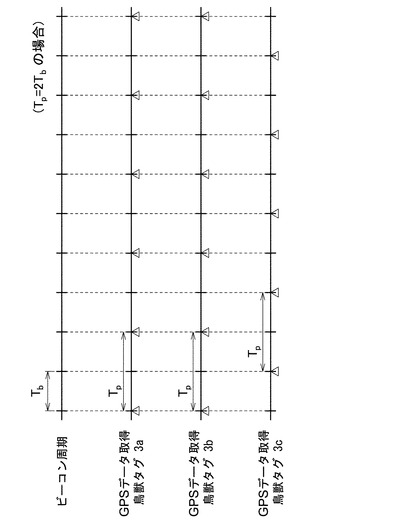
また、鳥獣タグ3に搭載されたGPSセンサ31のデータ取得も周期的であり、基地局1a,1bのビーコン送信周期をTb、GPSデータ取得周期をTpとすると、Tp=nTb(nは整数)の関係となるようにGPSデータ取得周期Tpが設定されていることが好ましい(図6を参照)。図6はn=2の場合を示す。これにより、幾つかの鳥獣タグ3(例えば、図6では鳥獣タグ3c)におけるGPSデータ取得・受信時期を他の鳥獣タグ3a,3bの対応時期からずらすことが可能となり、上記ランダムバックオフに加え、データ送信の競合が低減される。なお、追跡すべき鳥獣2が多数いる場合には、整数nの値を大きくすることが好ましい。この際、鳥獣タグ3におけるビーコン受信タイミングもビーコン送信周期のn倍に設定することが好ましい。
【0033】
(基地局アクセスの割り当て)
図6に示すように、本発明の鳥獣追跡システムでは、基地局1a,1bにアクセスするGPSデータ取得・基地局送信のタイミングTpは、鳥獣タグ3a,3b,3c毎に決定される。しかしながら、ある鳥獣タグ(例えば、3a)が大量のGPSデータを保存している場合があり、その鳥獣タグ3aに割り当てられたGPSデータ取得周期Tp内のビーコンスロットTbのみでは基地局1a,1bへGPSデータを全て送り終えない恐れがある。こうなってしまうと、このビーコンスロットTb終了後は、他の鳥獣タグ3b,3cのアクセスのためにビーコンスロットTbが割り当てられるため、未送信のGPSデータは、通常、その鳥獣タグ3aに割り当てられる次のGPSデータ取得周期TpのビーコンスロットTbが到来するまで、基地局1a,1bに送信されないことになる。
【0034】
上述の不具合の解決案として、他の鳥獣タグ3b,3cにおけるGPSデータの送信量が少なく、他の鳥獣タグ3b,3cに対応するビーコンスロットに空いた時間がある場合には、上記未送信GPSデータを有する鳥獣タグ3aがその空いた時間を利用できるようにすること(キャリーオーバー処理)が考えられる。但し、他の鳥獣タグ3b,3cに対応するビーコンスロットでは、本来行うべき鳥獣タグ3b,3cのデータ送信を優先すること(アクセス優先制御)が好ましい。
【0035】
(ビーコンスロットのアクセス優先制御)
上述の解決案を実現することに加えて、各鳥獣タグ3a,3b,3cに、蓄積されたGPSデータに量に応じて、優先度(例えば、表1に示すアクセスカテゴリAC)を決定し、この優先度に基づいて、ビーコンスロットのある時間帯(例えば、ランダムバックオフのためのスロットであるコンテンションウィンドウCW)での鳥獣タグ3a,3b,3cと基地局1a,1bとのアクセスを制御することが考えられる。
【0036】
【表1】

【0037】
表1の第1列のアクセスカテゴリACは、コンテンションウィンドウCWでのアクセスの優先度を示し、値が小さいカテゴリ程、優先度が高いことを示す。表1の第2列の蓄積データ量は、鳥獣タグ3a,3b,3cが蓄積しているGPSデータ量の分類を示し、満杯(フル)、空き容量有り、1個、及びキャリーオーバーに分類される。ここで、上記事例の場合、他の鳥獣タグ3b,3cは、基地局1aとのアクセスを行うために本来割り当てられたビーコンスロットでは、通常、満杯(フル、つまり鳥獣タグメモリ34に空き容量が無い状態)、空き容量有り、又は1個のGPSデータの蓄積量を有する。そして、先に基地局1aとのアクセスを行ったがデータ送信を完了しなかった鳥獣タグ3aは、未送信データを有しているので、これをキャリーオーバーに分類する。また、表1の第3列及び第4列のCWminとCWmaxとは、各アクセスカテゴリACに分類された鳥獣タグ3a,3b,3cが利用するコンテンションウィンドウの開始タイミングと終了タイミングとを示している。
【0038】
(キャリーオーバー処理)
それぞれの鳥獣タグ3a,3b,3cのGPSデータ蓄積量の分類と、CWの利用時間と、を表1のように設定することで、ある鳥獣タグ3aがあるGPS取得・送信周期Tpで割り当てられたビーコンスロットTbでそのデータを送り終えないような場合でも、次のGPS取得・送信周期TpでのビーコンスロットTbの到来を待たずに、先のGPS取得・送信周期Tp内の他の鳥獣タグ3b,3cに割り当てられたビーコンスロットTbにおいて未送信のデータの送信することが可能となる。なお、アクセスカテゴリACの優先度を表1にように設定することで、そのビーコンスロットTbに本来割り当てられた鳥獣タグ3b、3cのアクセスが、キャリーオーバーである未送信データを有する鳥獣タグ3aのアクセスより優先させることができる。
【0039】
また、ビーコンとともに基地局メモリ14に蓄積された最新の通信圏バージョン値が基地局1a,1bから鳥獣タグ3へ送信されることに留意されたい。上記バージョン値が送信された鳥獣タグ3は、処理装置33において、上記バージョン値と上記送信前までに鳥獣タグ3の鳥獣タグメモリ34に既に蓄積されている最新のバージョン値とを比較する。比較の結果、これらの値が同一であれば、鳥獣タグ3の鳥獣タグメモリ34に保存されている通信圏情報はそのまま維持される。
【0040】
一方、比較の結果、これらの値が異なっていれば(つまり、鳥獣タグメモリ34に蓄積されている通信圏バージョン値が最新でなければ)、GPSデータ送信スロットにおいて、GPSデータに加えて、この鳥獣タグ3の通信圏にある基地局1a,1bに最新の通信圏情報を要求するメッセージも送信する。この要求メッセージを受信した基地局1a,1bは、ビーコン一周期の期間のうちビーコン受信スロット及びGPSデータ送信スロット以外の別の時間帯を利用して、鳥獣タグ3に最新の通信圏情報を送信する。なお、上記時間帯を、基地局専用のスロットとして特定の時間帯(例えば、ビーコン周期の最後の時間スロット)に設定してもよい。
【0041】
なお、鳥獣タグ3は、GPSセンサ31による現在位置データと各基地局1a,1bの通信圏情報とを有するため、鳥獣2がいずれの基地局1a,1bの通信圏外に出てしまった場合には、即座に通信圏外であると判断し、ビーコン受信スロットでの受信機能をオフにし、省電力を図ることができる。
【0042】
本発明の鳥獣タグ3は、上述のように、いずれの基地局1a,1bの通信圏外にあるとき、又は、ビーコン受信が不可能である場合には、鳥獣タグ3がいずれかの基地局1a,1bと通信可能になるまでGPSセンサ31で逐次取得した位置情報を鳥獣タグメモリ34に蓄積する。従って、鳥獣タグメモリ34が満杯なった場合に対応した演算処理(間引きモード処理)を施す必要がある。具体的には、鳥獣タグメモリ34が満杯であると判断した際は、蓄積されているGPSデータを時間均等に間引くと共に、新たなGPSデータ取得の周期も間引き間隔に合せて延長する。
【0043】
このとき(1)飛翔区間終了時点(つまり、長周期起動状態に入る直前の時点)と(2)飛翔区間開始時点(つまり、短周期起動状態に入った最初の時点)とに取得したGPSデータ、及び(3)基地局1a,1bへの送信に成功しなかった最初のGPSデータは、優先的に保存する優先保存データであるので、間引く対象としない。
【0044】
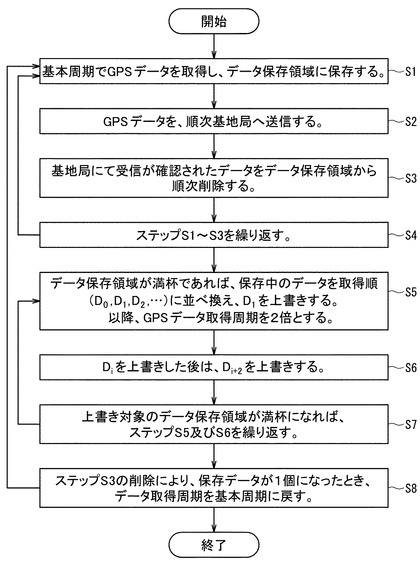
図7は間引きモード処理の各ステップを示したフローチャートである。まず、鳥獣タグ3では、GPSセンサ31によって基本周期でGPSデータが取得され、データ取得時刻順に上記データ保存領域に保存される(ステップS1)。このステップS1と同時に、GPSデータは順次、鳥獣タグ3と通信圏内にある基地局1a,1bへ送信される(ステップS2)。基地局1a,1bでの受信が確認されたGPSデータは鳥獣タグメモリ34のデータ保存領域から順次削除される(ステップS3)。上記ステップS1〜3が繰り返される(ステップS4)。しかしながら、様々な事情により鳥獣タグメモリ34のデータ保存領域が満杯である場合には、GPSデータを取得順に並べ替え、これらをD0、D1、D2、…とすると、D1に該当するデータを上書きし、以降のGPSデータ取得周期を2倍にする(ステップS5)。Di(D1を含む)の上書きの後は、Di+2に上書きを行う(ステップS6)。なお、ステップS6で上書きを行おうとするGPSデータが上記優先保存データであるときは、その次のデータ(Di+2の次のDi+3)に上書きする。また、データ保存領域に空き領域が出来れば、上書きはせず当該空き領域にGPSデータを保存する。そして、ステップS6のように上書きを続け、上書き対象のGPSデータが無くなれば、メモリのデータ保存領域は満杯であると判断して、上記ステップS5に戻り、ステップS5及びS6を繰り返す(ステップS7)。鳥獣タグメモリ34内の保存データが基地局受信確認によって削除され(ステップS3参照)、1個のみとなった場合には、GPSデータ取得周期を基本周期に戻す(ステップS8)。
【0045】
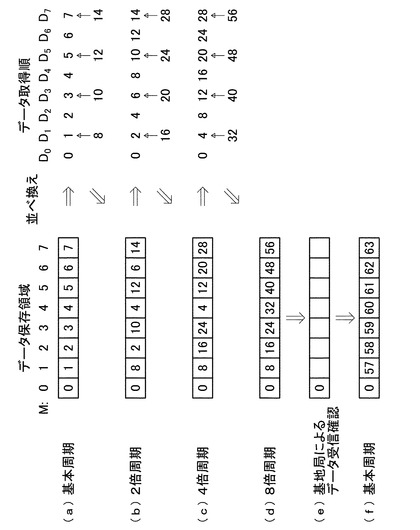
図8は、データ保存領域での上記間引きモード処理時のデータ処理方法の一例を図示したものである。なお、図8の例は、上述の優先保存データは存在せず、かつ、鳥獣タグメモリ34の有するデータ保存領域が8個ある(領域番号M=0〜7)と仮定する。
【0046】
まず、図8(a)は、ステップS1に対応して、データ保存領域が、基本周期を1単位とした時刻に取得されたGPSデータが当該データ保存領域の枠内に左から右へ順次割り当てられることを示す。例えば、基本周期によるデータ保存がデータ7まで蓄積して満杯になった場合(ステップS5)には、データ取得順に並べ換え、データ取得時刻8におけるデータ8がD1に相当するデータ1を上書きする。その後、基本周期は2倍周期に変更され、時刻10、12、14におけるデータ10、12、14がD3、D5、D7に相当するデータ3、5、7を上書きする(図8(b)参照)。そうすると、上書き対象データが無くなるので、鳥獣タグメモリ34が満杯であると判断し、現在までの保存されたGPSデータをデータ取得順に並べ換え、時刻16におけるデータは現在のD1に相当するデータ2を上書きする。その後、データ取得周期は4倍周期に設定され、時刻20、24、28におけるデータ20、24、28は、現在のD3、D5、D7に相当するデータ6、10、14を上書きする(図8(c)参照)。ここまでくると、再度、上書き対象データが無くなるので、鳥獣タグメモリ34が満杯であると判断し、現在までの保存されたGPSデータをデータ取得順に並べ換え、時刻32におけるデータは現在のD1に相当するデータ4を上書きする。その後、データ取得周期は8倍周期に設定され、時刻40、48、56におけるデータ40、48、56は、現在のD3、D5、D7に相当するデータ12、20、28を上書きする(図8(d)参照)。このデータ56が保存された直後に基地局1a,1bによってデータの受信が確認されると、現在までに保存されたデータは削除されていき、最後の1個であるデータ0のみになる(図8(e)参照)。その後、GPSデータ取得周期は基本周期に戻り、時刻57からGPSデータが順次、データ保存領域に保存されていくことになる(図8(f)参照)。
【0047】
鳥獣タグ3がGPSデータ保存中に、再度通信圏内に入った場合、蓄積されていたGPSデータを基地局1a,1bへ送信開始する。このとき、1回に最大m個のデータしか送れない場合がある。mの最大値は、例えば、鳥獣タグ3から基地局1a,1bへ連続的にデータを送信できる最大送信時間から決定される。
【0048】
なお、鳥獣タグ3が最初の1番目のGPSデータ(基本データ)について完全な状態で送信成功した場合、その後に送るデータについては基本データとの差分情報のみを送る。また、後者のGPSデータを保存する場合も差分情報のみが保存されることが好ましい。これにより、保存データサイズが大幅に圧縮され、これに伴いデータ送信時間も短縮され、鳥獣タグ3の省電力化が図られる。
【産業上の利用可能性】
【0049】
本発明のシステムは、佐渡島に生息するトキに代表される希少動物の行動の即時的モニタリングに適用可能であり、高精度測定や、人件費等のコストの抑制可能な完全自動化が可能であるため、非常に有望な技術である。また、中型以上の大きさの動物であれば、希少動物に限らず、田畑を荒らし人間に危害を加える熊、イノシシ、タヌキ、鹿等の野生動物やアライグマ、ジャワマングース等の日本に定着した侵略的外来動物の行動や生息環境の調査にも適用可能である。また、基地局に搭載する各種センサ機能を利用して、山火事・山崩れ等の自然災害の予測、公共事業の環境アセスメント、農林畜産業支援にも有効な技術である。
【符号の説明】
【0050】
1a,1b 基地局
2 鳥獣
3 鳥獣タグ
4a,4b アクセスネットワーク
5 インターネット網
6 データセンタ
11 時刻取得装置
12 アンテナ
13 処理装置
14 基地局メモリ
15 無線機
16 アンテナ
17 ネットワーク接続装置
18 高速データ通信カード
31 GPSセンサ
32 アンテナ
33 処理装置
34 鳥獣タグメモリ
35 無線機
36 アンテナ
37 電源
38 動き感知センサ
61 ネットワーク接続装置
62 サーバ
【技術分野】
【0001】
本発明は鳥獣追跡システムに関し、特に、GPSセンサ等の時刻取得装置を搭載した複数の基地局と省電力技術とを利用して鳥獣の生息環境を即時把握する鳥獣追跡システムに関するものである。
【背景技術】
【0002】
従来、野生鳥獣や希少動物の行動把握や生息環境調査のために、鳥獣に装着する小型電波発信機を用いた行動追跡が行われている。しかしながら、これらの追跡調査は生物学者など特定の人々による観察対象、目的、範囲、時期等の追跡条件が限定されたものであり、自然環境をボランティアなどの一般人の参画も含め、国土レベルの広範なエリアを対象に持続的にモニタリングするような取り組みやそれをサポートするシステムは見られない。
【0003】
ところで、生物多様性保全、自然再生に関する我が国の代表的な取り組みのひとつに、新潟県佐渡島における朱鷺(トキ)放鳥がある。トキの行動追跡のために、現状、非特許文献1に示すようなGPS(全地球測位システム)と衛星回線とを用いたテレメトリングが利用されているが、以下に示すように即時的な位置把握が困難であり、トキの追跡に多大の人手を要しているのが現状である。
【0004】
この現状のトキ追跡システムでは、位置情報データの中継に高度850kmにある気象観測衛星を利用するため、発信機と衛星との通信距離や発信機における所要送信電力が大きくなり、バッテリ節約のため位置情報の送信頻度を3〜10日に1回程度に制限する必要がある。また、鳥獣の位置によっては、衛星経由の通信品質に支障が生じてしまう場合もある。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】“アルゴス(ARGOS)”、[online]、株式会社 キュービック・アイ、[平成22年2月16日検索]、インターネット<URL:http://www.cubic-i.co.jp/index.html>
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、このような従来の実情に鑑みて提案されたものであり、野生鳥獣に装着させる無線タグ(以下、「鳥獣タグ」と呼ぶ。)の電力消費を最小限に抑えつつ、野生鳥獣の行動や生息環境の即時的な把握が可能な鳥獣追跡システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明者は、従来の人工衛星依存の追跡システムから脱却すること、具体的には、地上にGPSセンサ等の時刻取得装置を搭載した複数のデータ受信基地局を配備し、これらの基地局と鳥獣タグとの間での通信を効率的に行わせることで、電力消費を大幅に抑制可能になるとともに、鳥獣行動の即時的な把握が可能になることを見出し、本発明を完成するに至った。
【0008】
すなわち、本発明は、鳥獣に装着可能な鳥獣タグと、複数の基地局と、データセンタと、を備えた鳥獣追跡システムであって、
前記基地局は、前記鳥獣タグに向けてビーコンを周期的に送信する無線機と、前記基地局に関する時刻を少なくとも取得する時刻取得装置と、前記鳥獣タグ、前記時刻取得装置、及び前記データセンタから送信された情報を一時的に保存する基地局メモリと、前記データセンタとインターネットを介して通信を行うネットワーク接続装置と、前記無線機、前記時刻取得装置、前記基地局メモリ、及び前記ネットワーク接続装置の動作を制御する処理装置と、を備え、
前記鳥獣タグは、人工衛星から前記鳥獣タグの位置及び時刻を含んだGPSデータを取得するGPSセンサと、前記GPSデータを一時的に保存する鳥獣タグメモリと、前記ビーコンや前記GPSデータを前記基地局の各々と通信可能な無線機と、前記鳥獣の加速度を検知する動き感知センサと、前記GPSセンサ、前記無線機、及び前記鳥獣タグメモリの動作を制御しかつ周期的に起動する処理装置と、を備え、
前記鳥獣タグと前記基地局とは、前記GPSセンサと前記時刻取得手段とに基づき前記ビーコンの周期的な送受信の同期を取り、
前記鳥獣タグの前記GPSセンサは、前記処理装置の起動時のみ起動して前記GPSデータを周期的に取得し、
前記鳥獣タグの前記ビーコン受信周期と前記GPSセンサの前記GPSデータ取得周期との同期が取れていることを特徴とするものである。
【発明の効果】
【0009】
本発明の鳥獣追跡システムは、人工衛星に依存した従来の鳥獣追跡方式から脱却し、地上に複数のデータ受信基地局及びこれらの基地局とデータセンタとを接続するアクセスネットワークを配備し、かつ、省電力化技術をふんだんに採用しているために、即時的な鳥獣位置の把握が可能となる。具体的には、上空約850kmにある人工衛星を経由し、消費電力(空中線)が約1Wを要して情報送信する従来システムでは3〜10日分に一度の頻度での測定に甘んじているが、本発明のシステムでは、モニタリングの為の主要な通信を鳥獣に付された鳥獣タグと基地局との間の通信距離内(10km以下)で行い、消費電力が0.01W以下に抑制できるため、数分毎に鳥獣位置を把握することが可能になる。
【0010】
また、本発明のシステムでは、データセンタにおいて、電波環境等によって左右し得る各基地局の通信圏に関する情報を常に解析・更新し、全ての基地局の通信圏情報を各基地局に送信するため、鳥獣タグは、最新の通信圏情報を基にデータを送受信し、通信圏外でのメモリの保存・省電力化を実現することができる。
【0011】
また、本発明のシステムでは、鳥獣が基地局の通信圏外に出ても、その後いずれかの基地局の通信圏内に進入する際に、通信圏外のおける鳥獣の行動を把握可能である。また、通信圏内であっても電波の届きにくい場所に鳥獣が移動したとしても、鳥獣が当該場所への入る直前の情報を把握することにより、通信圏外における鳥獣の行動を高い精度で捕捉することが可能である。
【図面の簡単な説明】
【0012】
【図1】本発明に係る鳥獣追跡システムの構成の概略を示した図である。
【図2】本発明に係る鳥獣タグのハードウェア構成を示すブロック図である。
【図3】鳥獣タグにおける処理装置及びGPSセンサの起動制御方法を示した図である。
【図4】本発明に係る基地局及びデータセンタのハードウェア構成を示すブロック図である。
【図5】本発明の鳥獣追跡システムの動作の一部を示すシーケンス図である。
【図6】鳥獣タグにおけるGPSデータ取得周期とビーコン周期との関係を示した図である。
【図7】間引きモード処理の各ステップを示したフローチャートである。
【図8】データ保存領域での間引きモード処理時のデータ処理方法を示した図である。
【発明を実施するための形態】
【0013】
以下、本発明に係る野生鳥獣行動追跡システムを図面に示す実施の形態に基づき説明するが、本発明は、下記の具体的な実施形態に何等限定されるものではない。
【0014】
図1は、本発明に係る鳥獣追跡システムの構成の概略を示した図である。本発明の鳥獣追跡システムは、図1に示すように、鳥獣2に装着する鳥獣タグ3と、この鳥獣タグ3から発信されるGPSデータを受信する複数の基地局1a,1bと、これらの基地局1a,1bとインターネット網5とを接続するアクセスネットワーク4a,4bと、アクセスネットワーク4a,4b及びインターネット網5を介して複数の基地局1a,1bからの情報を収集・蓄積・解析するデータセンタ6とから構成される。
【0015】
従来の行動追跡方式にも複数の基地局を利用するものはあるが、本発明では各基地局1a,1bが現在時刻を取得する時刻取得装置11を備え、他の基地局及びデータセンタ6と連携して鳥獣タグ3との通信の省電力化及び高精度化を実現するよう高度な制御方式を実現する点に本発明の特徴がある。さらに、移動中(例えば飛翔中)の鳥獣2(例えば、トキ)の常時捕捉ができる点も独特である。また、鳥獣2が森の中など電波が届きにくい場所に着地したとしても、着地直前と飛翔直後とに測定したデータから着地時を捕捉するため、高精度な位置把握が可能である。
【0016】
なお、基地局1a,1bの時刻取得装置11は、現在時刻を取得できる装置があれば特に限定されないが、例えば、鳥獣タグ3に用いられるようなGPSセンサを適用してもよい。ここで、GPSセンサは、現在日時や、鳥獣タグの緯度、経度、高度等の位置データ(以下、GPSデータと呼ぶ。)を測定でき、かつ、上記各種のデータ取得タイミングが鳥獣タグ外部から設定できるものが好ましい。
【0017】
図2は、鳥獣タグ3のハードウェア構成を示すブロック図である。図2において、GPSセンサ31は、アンテナ32を介して図示しない人工衛星からの電波を受信し、鳥獣タグ3(つまり鳥獣タグ3が搭載された鳥獣2)の位置等のデータを取得し、この取得データをCPU等の処理装置33に送る。処理装置33に送られた取得データは逐次、メモリ34(以下、鳥獣タグメモリと呼ぶ)に蓄積される。鳥獣2が基地局1a,1bのいずれかの通信圏内にいれば(又は入れば)、無線機35が作動し、鳥獣タグメモリ34に蓄積されていたデータを処理装置33、無線機34を介してアンテナ36から基地局1a,1bに送信する。また、鳥獣タグ3内の各要素に電力を供給する電源37は小型化・軽量化された電源を利用することが好ましい。具体的には、鳥獣タグ3の重さは、これが装着される鳥獣2の動きに支障がないよう50グラム以下が好ましく、30グラム以下がさらに好ましい。このように小型化・軽量化された電源37であっても、以下詳述する省電力化技術の採用により鳥獣2行動の即時把握を充分に実現可能である。また、各基地局1a,1bと鳥獣タグ3との間の通信は、例えば、429MHz帯の特定小電力無線設備を利用して実現してもよい。
【0018】
鳥獣タグ3は、さらに動き感知センサ38を備える。動き感知センサ38の一例として、加速度センサ(好ましくは、鳥獣タグ3のX軸、Y軸、及びZ軸の加速度を検知できる加速度センサ)が挙げられる。また、鳥獣タグ3は、鳥獣タグ3付近の気圧を検知する気圧センサ(図示せず)を備えていてもよい。
【0019】
動き感知センサ38は、鳥獣3の移動又は静止(例えば、飛翔中又は静止)を検知し、処理装置33に割込動作を行う。鳥獣2が移動中であると動き感知センサ38が検知した際には、処理装置33は、割込起動されて短周期測定状態に入った状態になり、GPSセンサ31も短周期測定状態になるよう制御する。一方、鳥獣2が静止中であると動き感知センサ38が検知した際には、処理装置33は、割込起動されて長周期測定状態つまり電力消費抑制状態になり、GPSセンサ31も長周期測定状態になるよう制御する。処理装置33はGPS測位を行う時間のみ処理装置33、GPSセンサ31を起動状態(ON状態)とし、その他の時間は処理装置33、GPSセンサ31をスリープ状態(OFF状態)とする。これにより鳥獣タグ3の電力消費を抑制することが可能となる。
【0020】
次に、鳥獣タグ3における処理装置33及びGPSセンサ31の起動制御について説明する。本発明では、「周期起動」と「動き感知センサ起動」との大きく二つの方法を利用する。まず、周期起動制御は、図3(a)に示すように、処理装置33やGPSセンサ31を常時起動させておくのではなく、ある時間だけ周期的に起動・測定状態におく方法である。これにより、鳥獣2の移動状態に応じて、鳥獣タグ3の電力消費を抑制することができる。
【0021】
動き感知センサ起動制御は、図3(b)に示すように、動き感知センサ38の起動信号(割込信号)がONになっている間(つまり鳥獣2が飛翔中の期間)、処理装置33及びGPSセンサ31の起動周期を比較的小さな値(例えば、5分間)に設定する一方、動き感知センサ38の起動信号がOFFになっている間(つまり鳥獣2が静止中の期間)、上記起動周期を比較的大きな値(例えば、2時間)に設定するものである。これにより、鳥獣2の飛翔中は、GPSセンサ31でのデータ取得を比較的頻繁に行う短周期起動状態におき、鳥獣2の静止中は、GPSセンサ31のデータ取得(すなわち電力消費)を抑制する長周期起動状態に設定することができる。
【0022】
図4は、基地局1a,1b及びデータセンタ6のハードウェアの構成を示したブロック図である。各基地局1a,1bは、処理装置13と、時刻取得装置11と,基地局メモリ14と、無線機15と、アンテナ12,16と、ネットワーク接続装置17とを備える。無線機15は、アンテナ16を介して、通信圏内に生息する鳥獣タグ3にビーコンを送出するとともに、鳥獣タグ3からの電波を受信し、この受信した情報を基地局メモリ14に保存する。また、時刻取得装置11は、ある時刻における基地局1a,1bの位置情報を得たり、鳥獣タグ3から受信したデータに受信時刻を付与したり、ビーコン信号の周期的送信に必要な現在時刻を取得するために基地局1a,1bに搭載されている。具体的には、時刻取得装置11は、アンテナ12を介して人工衛星から電波を受信した基地局1a,1bの位置データを基地局メモリ14に蓄積するよう処理装置13に送信したり、アンテナ16及び無線機15を介して受信された鳥獣タグ3のデータに受信時刻を付与したりする。この処理装置13と無線機15との間の通信は、例えば、RS−232Cを利用してもよい。
【0023】
本発明の鳥獣追跡システムでは、全ての基地局1a,1bが同一のタイミングでビーコンの送信(送出)を行うことを前提としている。このため、隣接する基地局(例えば、1a,1b)の通信圏が重なる領域(図1において、二つの円(破線)の重複領域)に鳥獣2が移動した場合には、これらの基地局1a,1bから送出されたビーコンが鳥獣タグ3において衝突する恐れがある。このような問題を改善する方法の一つとして、各基地局1a,1bでのビーコン送出を毎回周期的に行うのではなく、確率的な方法を利用して周期的かつ確率的に行うこと(以下、「確率周期送信」と呼ぶ)が挙げられる。例えば、二つの基地局1a,1bだけが隣接しているような場合、各基地局1a,1bが、ビーコン送信周期毎に通常行われるビーコン送信のうち50%程度の頻度だけランダムに送信が行われるように設定する(つまり、ビーコン送出の確率を0.5に設定)。このような確率周期送信制御を用いれば、上述の衝突の問題は大幅に改善される。
【0024】
上記のようなビーコンの確率周期送信制御を基地局1a,1bが採用した場合、鳥獣タグ3は、ビーコンの受信が途絶えた際、鳥獣2が基地局1a,1bの通信圏の外へ移動したためか、確率周期送信制御のためにビーコン自体が基地局1a,1bから送信されなかったのか、のいずれの状況であるのか判定できないことも予測される。そこで、鳥獣タグ3には基地局1a,1bからのビーコン送信周期の基本情報を予め記憶させておき、ビーコンの受信履歴に基づいて通信圏の内外を判定させることが好ましい。
【0025】
なお、上述の確率を1未満に設定すれば、ビーコン送出は確率周期送信制御になり、確率を1に設定すれば、上述した通常の周期的送信制御になる。以下に示す本発明の実施形態(例えば、図5に示す本発明の鳥獣追跡システムの動作)については、通常の周期的送信制御に基づいて説明を行っている。
【0026】
また、ネットワーク接続装置17には高速データ通信カード18が設けられており、インターネット網5を介して基地局1a,1bとデータセンタ6とを接続するアクセスネットワーク4a,4bの構築に寄与する。このアクセスネットワーク4a,4bには電気通信事業者が提供する携帯電話サービス(例えば、FOMA網によるパケット通信)を利用することができる。各基地局1a,1bのネットワーク接続装置17は、処理装置13に接続されており、基地局メモリ14に蓄積された鳥獣タグ3や基地局1a,1bに関するデータをデータセンタ6に送信するとともに、データセンタ6において解析・推定された全ての基地局1a,1bの通信圏情報とバージョン値を受信し、基地局メモリ14に蓄積させる。
【0027】
データセンタ6は、インターネット網5に接続するネットワーク接続装置61とサーバ62とを備え、各基地局1a,1bの各ネットワーク接続装置17からの情報をサーバ62に蓄積し、図示しない解析・演算部において各鳥獣2の移動履歴と各基地局1a,1bの通信圏情報を更新し、図示しない表示部において各鳥獣2の移動位置や移動履歴等を表示する。基地局1a,1bは、鳥獣タグ3からGPSデータを受信する際にその受信時刻を記録し、その後、GPSデータと基地局受信時刻とをデータセンタ6に送る。データセンタ6では、各鳥獣タグ3によって収集したGPSデータ及びGPS取得時刻と、基地局1a,1bで受信した時刻とを基に、各基地局1a,1bと通信可能な地点及び通信不可能な地点を表示部の3次元マップ上に記録する。データセンタ6は全ての基地局1a,1bの通信圏情報とバージョン値とを定期的(例えば1週間に1回)各基地局1a,1bへ送る。
【0028】
通信圏情報とバージョン値の定義及びこれらの具体的な作成方法については、以下に述べる通りである。鳥獣タグ3のGPSデータに含まれる時刻データと基地局1a,1bにてそのGPSデータを受信したときの時刻を比較すると、GPSデータの取得地点が基地局1a,1bと通信可能か否かの情報を得ることができる。すなわち取得したGPSデータが一定時間内で受信されれば、その地点が基地局1a,1bと通信可能であることがわかる。遅延が一定時間以上であれば、通信ができず鳥獣タグメモリ34に一定時間保存された後に、受信されたデータであることがわかる。基地局1a,1bに受信される個々のGPSデータ取得地点と基地局1a,1bとの通信可否とを、基地局1a,1bを中心とするマップ上に高度別に表示する。基地局1a,1bを中心に通信可能な領域と通信不可能な領域の境目を閉曲線で結ぶ。この閉曲線を「通信圏」と呼ぶことにする。電波の状況などにより通信可能な領域と通信不可能な領域の境目が明確でない場合もあるが、統計処理的な方法(例えば通信可能性が50%程度以上であれば通信圏内とする)により境目を特定する。通信可能距離は鳥獣タグが上空になり、基地局1a,1bとの見通しが確保できると通信圏が大きくなるので、通信圏を高度別に求め、最大通信圏を求める。これを「通信圏情報」と呼ぶ。各基地局1a,1bの通信圏情報の推定処理はデータセンタで行う。通信圏の情報は鳥獣タグ3の位置推定や省電力化に有用である。
【0029】
通信圏情報は鳥獣タグ3からのGPSデータ数が増えると通信圏情報の推定精度が向上する。また、基地局1a,1bを増やした場合は新たな通信圏情報が必要になる。そこで、データセンタ6では一定期間ごとに各基地局1a,1bの通信圏情報を更新するものとする。また、更新された通信圏情報は各基地局1a,1bへダウンロードされ、基地局1a,1bから鳥獣タグ3へダウンロードされる。鳥獣タグ3はアクセスした任意の基地局1a,1bから全ての基地局1a,1bの通信圏情報をまとめてダウンロードできる。これを実現するため、データセンタでは通信圏情報を更新する度毎にそのバージョン値(「通信圏情報バージョン値」と呼ぶ)を増やし、通信圏情報に含めて各基地局1a,1bへ送る。各基地局1a,1bは通信圏情報バージョン値をビーコンに含めて送る。これを受信した鳥獣タグ3は自身が保持する通信圏情報のバージョン値と比較し、バージョンが古い場合は最新の通信圏情報を基地局1a,1bへ要求する。
【0030】
図5は、本発明の鳥獣追跡システムの動作の一部を示すシーケンス図である。データセンタ6は、基地局1a,1bの各々へ向けて、全ての基地局1a,1bの通信圏情報及びこの情報に対応した通信圏バージョン値を送信する。各基地局1a,1bはこれらの情報を基地局メモリ14に蓄積する。各基地局1a,1bにおいては、処理装置13が周期的に無線機15を起動させ、基地局1a,1bから鳥獣タグ3に向けて周期的(例えば、5分毎)にビーコンを送信する。鳥獣タグ3は、GPSデータ取得直後に、いずれかの基地局1a,1bの通信圏内にあればビーコンを受信するが、無線機35をビーコン受信のために絶えず待機させないように省電力設計されている。具体的には、基地局1a,1bからのビーコン送信周期に同期するように鳥獣タグ3のビーコン受信タイミング(以下、ビーコンスロットとも呼ぶ)が設定されている。例えば、鳥獣タグ3のビーコン受信周期が上記ビーコン送信周期と一致し、受信期間が例えばビーコン送信時から微小時間(例えば、0.2秒間)に設定されている。基地局1a,1bと鳥獣タグ3とは双方ともに、位置データとともに現在時刻を取得できる時刻取得装置11、GPSセンサ,31を備えているため、上記ビーコン送受信の同期は容易に実現可能である。
【0031】
鳥獣タグ3は、ビーコンの受信に成功したら、ランダムバックオフの後、既に蓄積していたGPSデータを基地局1a,1bに向けて送信する。言い換えれば、上記ビーコン周期の間には、ビーコン受信スロットとは別にGPSデータ送信を行なうデータ送信スロットが存在するのである。基地局1a,1bに送信された各鳥獣タグ3のGPSデータは一旦、基地局メモリ14に蓄積された後、ネットワーク接続装置17を介してデータセンタ6に送信される。なお、上記ランダムバックオフとは、複数の信号が媒体上で衝突するのを防止するため、乱数で決まる一定時間だけ待った後、媒体上の信号の検知を行い、媒体が空いていればデータを送信する処理のことであり、媒体が空いていなければ再度バックオフを行う。データ送信を同時に行う鳥獣タグ3が複数ある場合にこれらの鳥獣タグ3から基地局1a,1bへのデータ送信の衝突を回避できる。たまたま複数の鳥獣タグ3のランダムバックオフが同じ値となった場合にはデータの衝突が起こるが、その場合にはデータの再送を行う。この際、バックオフの選択範囲を2倍などに設定し、さらなら衝突の可能性を低減することが望ましい。
【0032】
また、鳥獣タグ3に搭載されたGPSセンサ31のデータ取得も周期的であり、基地局1a,1bのビーコン送信周期をTb、GPSデータ取得周期をTpとすると、Tp=nTb(nは整数)の関係となるようにGPSデータ取得周期Tpが設定されていることが好ましい(図6を参照)。図6はn=2の場合を示す。これにより、幾つかの鳥獣タグ3(例えば、図6では鳥獣タグ3c)におけるGPSデータ取得・受信時期を他の鳥獣タグ3a,3bの対応時期からずらすことが可能となり、上記ランダムバックオフに加え、データ送信の競合が低減される。なお、追跡すべき鳥獣2が多数いる場合には、整数nの値を大きくすることが好ましい。この際、鳥獣タグ3におけるビーコン受信タイミングもビーコン送信周期のn倍に設定することが好ましい。
【0033】
(基地局アクセスの割り当て)
図6に示すように、本発明の鳥獣追跡システムでは、基地局1a,1bにアクセスするGPSデータ取得・基地局送信のタイミングTpは、鳥獣タグ3a,3b,3c毎に決定される。しかしながら、ある鳥獣タグ(例えば、3a)が大量のGPSデータを保存している場合があり、その鳥獣タグ3aに割り当てられたGPSデータ取得周期Tp内のビーコンスロットTbのみでは基地局1a,1bへGPSデータを全て送り終えない恐れがある。こうなってしまうと、このビーコンスロットTb終了後は、他の鳥獣タグ3b,3cのアクセスのためにビーコンスロットTbが割り当てられるため、未送信のGPSデータは、通常、その鳥獣タグ3aに割り当てられる次のGPSデータ取得周期TpのビーコンスロットTbが到来するまで、基地局1a,1bに送信されないことになる。
【0034】
上述の不具合の解決案として、他の鳥獣タグ3b,3cにおけるGPSデータの送信量が少なく、他の鳥獣タグ3b,3cに対応するビーコンスロットに空いた時間がある場合には、上記未送信GPSデータを有する鳥獣タグ3aがその空いた時間を利用できるようにすること(キャリーオーバー処理)が考えられる。但し、他の鳥獣タグ3b,3cに対応するビーコンスロットでは、本来行うべき鳥獣タグ3b,3cのデータ送信を優先すること(アクセス優先制御)が好ましい。
【0035】
(ビーコンスロットのアクセス優先制御)
上述の解決案を実現することに加えて、各鳥獣タグ3a,3b,3cに、蓄積されたGPSデータに量に応じて、優先度(例えば、表1に示すアクセスカテゴリAC)を決定し、この優先度に基づいて、ビーコンスロットのある時間帯(例えば、ランダムバックオフのためのスロットであるコンテンションウィンドウCW)での鳥獣タグ3a,3b,3cと基地局1a,1bとのアクセスを制御することが考えられる。
【0036】
【表1】
【0037】
表1の第1列のアクセスカテゴリACは、コンテンションウィンドウCWでのアクセスの優先度を示し、値が小さいカテゴリ程、優先度が高いことを示す。表1の第2列の蓄積データ量は、鳥獣タグ3a,3b,3cが蓄積しているGPSデータ量の分類を示し、満杯(フル)、空き容量有り、1個、及びキャリーオーバーに分類される。ここで、上記事例の場合、他の鳥獣タグ3b,3cは、基地局1aとのアクセスを行うために本来割り当てられたビーコンスロットでは、通常、満杯(フル、つまり鳥獣タグメモリ34に空き容量が無い状態)、空き容量有り、又は1個のGPSデータの蓄積量を有する。そして、先に基地局1aとのアクセスを行ったがデータ送信を完了しなかった鳥獣タグ3aは、未送信データを有しているので、これをキャリーオーバーに分類する。また、表1の第3列及び第4列のCWminとCWmaxとは、各アクセスカテゴリACに分類された鳥獣タグ3a,3b,3cが利用するコンテンションウィンドウの開始タイミングと終了タイミングとを示している。
【0038】
(キャリーオーバー処理)
それぞれの鳥獣タグ3a,3b,3cのGPSデータ蓄積量の分類と、CWの利用時間と、を表1のように設定することで、ある鳥獣タグ3aがあるGPS取得・送信周期Tpで割り当てられたビーコンスロットTbでそのデータを送り終えないような場合でも、次のGPS取得・送信周期TpでのビーコンスロットTbの到来を待たずに、先のGPS取得・送信周期Tp内の他の鳥獣タグ3b,3cに割り当てられたビーコンスロットTbにおいて未送信のデータの送信することが可能となる。なお、アクセスカテゴリACの優先度を表1にように設定することで、そのビーコンスロットTbに本来割り当てられた鳥獣タグ3b、3cのアクセスが、キャリーオーバーである未送信データを有する鳥獣タグ3aのアクセスより優先させることができる。
【0039】
また、ビーコンとともに基地局メモリ14に蓄積された最新の通信圏バージョン値が基地局1a,1bから鳥獣タグ3へ送信されることに留意されたい。上記バージョン値が送信された鳥獣タグ3は、処理装置33において、上記バージョン値と上記送信前までに鳥獣タグ3の鳥獣タグメモリ34に既に蓄積されている最新のバージョン値とを比較する。比較の結果、これらの値が同一であれば、鳥獣タグ3の鳥獣タグメモリ34に保存されている通信圏情報はそのまま維持される。
【0040】
一方、比較の結果、これらの値が異なっていれば(つまり、鳥獣タグメモリ34に蓄積されている通信圏バージョン値が最新でなければ)、GPSデータ送信スロットにおいて、GPSデータに加えて、この鳥獣タグ3の通信圏にある基地局1a,1bに最新の通信圏情報を要求するメッセージも送信する。この要求メッセージを受信した基地局1a,1bは、ビーコン一周期の期間のうちビーコン受信スロット及びGPSデータ送信スロット以外の別の時間帯を利用して、鳥獣タグ3に最新の通信圏情報を送信する。なお、上記時間帯を、基地局専用のスロットとして特定の時間帯(例えば、ビーコン周期の最後の時間スロット)に設定してもよい。
【0041】
なお、鳥獣タグ3は、GPSセンサ31による現在位置データと各基地局1a,1bの通信圏情報とを有するため、鳥獣2がいずれの基地局1a,1bの通信圏外に出てしまった場合には、即座に通信圏外であると判断し、ビーコン受信スロットでの受信機能をオフにし、省電力を図ることができる。
【0042】
本発明の鳥獣タグ3は、上述のように、いずれの基地局1a,1bの通信圏外にあるとき、又は、ビーコン受信が不可能である場合には、鳥獣タグ3がいずれかの基地局1a,1bと通信可能になるまでGPSセンサ31で逐次取得した位置情報を鳥獣タグメモリ34に蓄積する。従って、鳥獣タグメモリ34が満杯なった場合に対応した演算処理(間引きモード処理)を施す必要がある。具体的には、鳥獣タグメモリ34が満杯であると判断した際は、蓄積されているGPSデータを時間均等に間引くと共に、新たなGPSデータ取得の周期も間引き間隔に合せて延長する。
【0043】
このとき(1)飛翔区間終了時点(つまり、長周期起動状態に入る直前の時点)と(2)飛翔区間開始時点(つまり、短周期起動状態に入った最初の時点)とに取得したGPSデータ、及び(3)基地局1a,1bへの送信に成功しなかった最初のGPSデータは、優先的に保存する優先保存データであるので、間引く対象としない。
【0044】
図7は間引きモード処理の各ステップを示したフローチャートである。まず、鳥獣タグ3では、GPSセンサ31によって基本周期でGPSデータが取得され、データ取得時刻順に上記データ保存領域に保存される(ステップS1)。このステップS1と同時に、GPSデータは順次、鳥獣タグ3と通信圏内にある基地局1a,1bへ送信される(ステップS2)。基地局1a,1bでの受信が確認されたGPSデータは鳥獣タグメモリ34のデータ保存領域から順次削除される(ステップS3)。上記ステップS1〜3が繰り返される(ステップS4)。しかしながら、様々な事情により鳥獣タグメモリ34のデータ保存領域が満杯である場合には、GPSデータを取得順に並べ替え、これらをD0、D1、D2、…とすると、D1に該当するデータを上書きし、以降のGPSデータ取得周期を2倍にする(ステップS5)。Di(D1を含む)の上書きの後は、Di+2に上書きを行う(ステップS6)。なお、ステップS6で上書きを行おうとするGPSデータが上記優先保存データであるときは、その次のデータ(Di+2の次のDi+3)に上書きする。また、データ保存領域に空き領域が出来れば、上書きはせず当該空き領域にGPSデータを保存する。そして、ステップS6のように上書きを続け、上書き対象のGPSデータが無くなれば、メモリのデータ保存領域は満杯であると判断して、上記ステップS5に戻り、ステップS5及びS6を繰り返す(ステップS7)。鳥獣タグメモリ34内の保存データが基地局受信確認によって削除され(ステップS3参照)、1個のみとなった場合には、GPSデータ取得周期を基本周期に戻す(ステップS8)。
【0045】
図8は、データ保存領域での上記間引きモード処理時のデータ処理方法の一例を図示したものである。なお、図8の例は、上述の優先保存データは存在せず、かつ、鳥獣タグメモリ34の有するデータ保存領域が8個ある(領域番号M=0〜7)と仮定する。
【0046】
まず、図8(a)は、ステップS1に対応して、データ保存領域が、基本周期を1単位とした時刻に取得されたGPSデータが当該データ保存領域の枠内に左から右へ順次割り当てられることを示す。例えば、基本周期によるデータ保存がデータ7まで蓄積して満杯になった場合(ステップS5)には、データ取得順に並べ換え、データ取得時刻8におけるデータ8がD1に相当するデータ1を上書きする。その後、基本周期は2倍周期に変更され、時刻10、12、14におけるデータ10、12、14がD3、D5、D7に相当するデータ3、5、7を上書きする(図8(b)参照)。そうすると、上書き対象データが無くなるので、鳥獣タグメモリ34が満杯であると判断し、現在までの保存されたGPSデータをデータ取得順に並べ換え、時刻16におけるデータは現在のD1に相当するデータ2を上書きする。その後、データ取得周期は4倍周期に設定され、時刻20、24、28におけるデータ20、24、28は、現在のD3、D5、D7に相当するデータ6、10、14を上書きする(図8(c)参照)。ここまでくると、再度、上書き対象データが無くなるので、鳥獣タグメモリ34が満杯であると判断し、現在までの保存されたGPSデータをデータ取得順に並べ換え、時刻32におけるデータは現在のD1に相当するデータ4を上書きする。その後、データ取得周期は8倍周期に設定され、時刻40、48、56におけるデータ40、48、56は、現在のD3、D5、D7に相当するデータ12、20、28を上書きする(図8(d)参照)。このデータ56が保存された直後に基地局1a,1bによってデータの受信が確認されると、現在までに保存されたデータは削除されていき、最後の1個であるデータ0のみになる(図8(e)参照)。その後、GPSデータ取得周期は基本周期に戻り、時刻57からGPSデータが順次、データ保存領域に保存されていくことになる(図8(f)参照)。
【0047】
鳥獣タグ3がGPSデータ保存中に、再度通信圏内に入った場合、蓄積されていたGPSデータを基地局1a,1bへ送信開始する。このとき、1回に最大m個のデータしか送れない場合がある。mの最大値は、例えば、鳥獣タグ3から基地局1a,1bへ連続的にデータを送信できる最大送信時間から決定される。
【0048】
なお、鳥獣タグ3が最初の1番目のGPSデータ(基本データ)について完全な状態で送信成功した場合、その後に送るデータについては基本データとの差分情報のみを送る。また、後者のGPSデータを保存する場合も差分情報のみが保存されることが好ましい。これにより、保存データサイズが大幅に圧縮され、これに伴いデータ送信時間も短縮され、鳥獣タグ3の省電力化が図られる。
【産業上の利用可能性】
【0049】
本発明のシステムは、佐渡島に生息するトキに代表される希少動物の行動の即時的モニタリングに適用可能であり、高精度測定や、人件費等のコストの抑制可能な完全自動化が可能であるため、非常に有望な技術である。また、中型以上の大きさの動物であれば、希少動物に限らず、田畑を荒らし人間に危害を加える熊、イノシシ、タヌキ、鹿等の野生動物やアライグマ、ジャワマングース等の日本に定着した侵略的外来動物の行動や生息環境の調査にも適用可能である。また、基地局に搭載する各種センサ機能を利用して、山火事・山崩れ等の自然災害の予測、公共事業の環境アセスメント、農林畜産業支援にも有効な技術である。
【符号の説明】
【0050】
1a,1b 基地局
2 鳥獣
3 鳥獣タグ
4a,4b アクセスネットワーク
5 インターネット網
6 データセンタ
11 時刻取得装置
12 アンテナ
13 処理装置
14 基地局メモリ
15 無線機
16 アンテナ
17 ネットワーク接続装置
18 高速データ通信カード
31 GPSセンサ
32 アンテナ
33 処理装置
34 鳥獣タグメモリ
35 無線機
36 アンテナ
37 電源
38 動き感知センサ
61 ネットワーク接続装置
62 サーバ
【特許請求の範囲】
【請求項1】
鳥獣に装着可能な鳥獣タグと、複数の基地局と、データセンタと、を備えた鳥獣追跡システムであって、
前記基地局は、前記鳥獣タグに向けてビーコンを周期的に送信する無線機と、前記基地局に関する時刻を少なくとも取得する時刻取得装置と、前記鳥獣タグ、前記時刻取得装置、及び前記データセンタから送信された情報を一時的に保存する基地局メモリと、前記データセンタとインターネットを介して通信を行うネットワーク接続装置と、前記無線機、前記時刻取得装置、前記基地局メモリ、及び前記ネットワーク接続装置の動作を制御する処理装置と、を備え、
前記鳥獣タグは、人工衛星から前記鳥獣タグの位置及び時刻を含んだGPSデータを取得するGPSセンサと、前記GPSデータを一時的に保存する鳥獣タグメモリと、前記ビーコンや前記GPSデータを前記基地局の各々と通信可能な無線機と、前記鳥獣の加速度を検知する動き感知センサと、前記GPSセンサ、前記無線機、及び前記鳥獣タグメモリの動作を制御しかつ周期的に起動する処理装置と、を備え、
前記鳥獣タグと前記基地局とは、前記GPSセンサと前記時刻取得手段とに基づき前記ビーコンの周期的な送受信の同期を取り、
前記鳥獣タグの前記GPSセンサは、前記処理装置の起動時のみ起動して前記GPSデータを周期的に取得し、
前記鳥獣タグの前記ビーコン受信周期と前記GPSセンサの前記GPSデータ取得周期との同期が取れていることを特徴とする鳥獣追跡システム。
【請求項2】
前記GPSセンサの前記GPSデータ取得周期が前記基地局の前記ビーコン送信周期の整数倍であり、かつ、前記整数が2以上であることを特徴とする請求項1に記載の鳥獣追跡システム。
【請求項3】
前記基地局は、前記鳥獣タグへ前記ビーコンを周期的かつ確率的に送信することを特徴とする請求項1又は2に記載の鳥獣追跡システム。
【請求項4】
前記基地局が前記鳥獣タグへ前記ビーコンを周期的かつ確率的に送信する場合には、前記鳥獣タグは、前記鳥獣タグメモリに予め記憶された前記ビーコン送信周期の基本情報と、前記ビーコンの受信履歴と、に基づいて前記基地局の通信圏の内外を判定することを特徴とする請求項3に記載の鳥獣追跡システム。
【請求項5】
前記鳥獣タグは、いずれの前記基地局とも通信圏外にあるときは、前記無線機によるビーコン受信を停止することを特徴とする請求項1〜4のいずれか1項に記載の鳥獣追跡システム。
【請求項6】
前記動き感知センサが、前記鳥獣の静止状態を検知したときは、前記鳥獣タグの前記GPSセンサによる前記GPSデータ取得周期を延長させることを特徴とする請求項1〜5のいずれか1項に記載の鳥獣追跡システム。
【請求項7】
前記鳥獣タグメモリは、前記GPSデータの一つを基本データとして完全な状態で保存・送信し、その他を前記基本データとの差分情報として保存・送信することを特徴とする請求項1〜6のいずれか1項に記載の鳥獣追跡システム。
【請求項8】
前記鳥獣タグが前記鳥獣タグに割り当てられた前記ビーコン受信周期において前記GPSデータの全てを前記基地局へ送り終えないときは、前記鳥獣タグ以外の他の鳥獣タグのビーコン受信周期の時間帯において未送信の前記GPSデータを前記基地局へ送信するよう制御されていることを特徴とする請求項1〜7のいずれか1項に記載の鳥獣追跡システム。
【請求項9】
前記他の鳥獣タグの前記ビーコン受信周期の前記時間帯では、前記他の鳥獣タグに蓄積された前記GPSデータを前記未送信GPSデータより優先して前記基地局へ送信するよう制御されていることを特徴とする請求項8に記載の鳥獣追跡システム。
【請求項10】
前記他の鳥獣タグの前記ビーコン受信周期の前記時間帯では、前記GPSデータの保存領域に空きの無い前記鳥獣タグメモリを有する前記他の鳥獣タグが、前記GPSデータの保存領域に空きの有る前記鳥獣タグメモリを有する前記他の鳥獣タグよりも優先して前記GPSデータを前記基地局へ送信するよう制御されていることを特徴とする請求項8又は9に記載の鳥獣追跡システム。
【請求項11】
前記データセンタは、前記基地局を介して前記鳥獣タグから前記基本データと前記差分情報とを受信し、
前記鳥獣タグメモリは、前記データセンタにて受信が確認された前記差分情報を順次削除することを特徴とする請求項7〜10のいずれか1項に記載の鳥獣追跡システム。
【請求項12】
前記鳥獣タグがいずれの前記基地局とも通信圏外にあり、かつ、前記鳥獣タグメモリが満杯であるときは、保存された前記GPSデータを時間均等に間引くとともに、前記GPSセンサによる前記GPSデータ取得周期も前記間引間隔に併せて延長させることを特徴とする請求項1〜11のいずれか1項に記載の鳥獣追跡システム。
【請求項13】
前記GPSデータの一部を前記間引き処理の対象とせず、前記鳥獣タグメモリに優先的に保存することを特徴とする請求項12に記載の鳥獣追跡システム。
【請求項14】
前記データセンタは、前記鳥獣タグ及び前記基地局から受信した前記情報から前記基地局毎に通信圏情報と前記通信圏情報のバージョン値と作成及び更新し、全ての前記基地局の前記通信圏情報と前記バージョン値とを前記基地局の各々に送信し、
前記基地局は、前記基地局メモリにおいて前記データセンタから受信した前記通信圏情報と前記通信圏情報の前記バージョン値を保存し、前記ビーコンとともに最新の前記通信圏情報と最新の前記バージョン値とを前記鳥獣タグに送信することを特徴とする請求項1〜13のいずれかに記載の鳥獣追跡システム。
【請求項15】
前記データセンタは、前記鳥獣タグ及び前記基地局から受信した前記情報から前記基地局毎に通信圏情報と前記通信圏情報のバージョン値と作成及び更新し、全ての前記基地局の前記通信圏情報と前記バージョン値を前記基地局の各々に送信し、
前記基地局は、前記基地局メモリにおいて前記データセンタから受信した前記通信圏情報と前記通信圏情報の前記バージョン値を保存し、前記ビーコンとともに最新の前記バージョン値を前記鳥獣タグに送信し、
前記鳥獣タグは、前記最新のバージョン値を受信し、前記鳥獣タグメモリにおいて既に保存している前記バージョン値と比較し、双方の値が異なる場合には、前記基地局へ前記通信圏情報を要求し、
前記基地局は、前記要求を受信した場合には、前記ビーコン送受信以外の時間帯で前記最新の前記通信圏情報を前記鳥獣タグへ送信することを特徴とする請求項1〜13のいずれかに記載の鳥獣追跡システム。
【請求項1】
鳥獣に装着可能な鳥獣タグと、複数の基地局と、データセンタと、を備えた鳥獣追跡システムであって、
前記基地局は、前記鳥獣タグに向けてビーコンを周期的に送信する無線機と、前記基地局に関する時刻を少なくとも取得する時刻取得装置と、前記鳥獣タグ、前記時刻取得装置、及び前記データセンタから送信された情報を一時的に保存する基地局メモリと、前記データセンタとインターネットを介して通信を行うネットワーク接続装置と、前記無線機、前記時刻取得装置、前記基地局メモリ、及び前記ネットワーク接続装置の動作を制御する処理装置と、を備え、
前記鳥獣タグは、人工衛星から前記鳥獣タグの位置及び時刻を含んだGPSデータを取得するGPSセンサと、前記GPSデータを一時的に保存する鳥獣タグメモリと、前記ビーコンや前記GPSデータを前記基地局の各々と通信可能な無線機と、前記鳥獣の加速度を検知する動き感知センサと、前記GPSセンサ、前記無線機、及び前記鳥獣タグメモリの動作を制御しかつ周期的に起動する処理装置と、を備え、
前記鳥獣タグと前記基地局とは、前記GPSセンサと前記時刻取得手段とに基づき前記ビーコンの周期的な送受信の同期を取り、
前記鳥獣タグの前記GPSセンサは、前記処理装置の起動時のみ起動して前記GPSデータを周期的に取得し、
前記鳥獣タグの前記ビーコン受信周期と前記GPSセンサの前記GPSデータ取得周期との同期が取れていることを特徴とする鳥獣追跡システム。
【請求項2】
前記GPSセンサの前記GPSデータ取得周期が前記基地局の前記ビーコン送信周期の整数倍であり、かつ、前記整数が2以上であることを特徴とする請求項1に記載の鳥獣追跡システム。
【請求項3】
前記基地局は、前記鳥獣タグへ前記ビーコンを周期的かつ確率的に送信することを特徴とする請求項1又は2に記載の鳥獣追跡システム。
【請求項4】
前記基地局が前記鳥獣タグへ前記ビーコンを周期的かつ確率的に送信する場合には、前記鳥獣タグは、前記鳥獣タグメモリに予め記憶された前記ビーコン送信周期の基本情報と、前記ビーコンの受信履歴と、に基づいて前記基地局の通信圏の内外を判定することを特徴とする請求項3に記載の鳥獣追跡システム。
【請求項5】
前記鳥獣タグは、いずれの前記基地局とも通信圏外にあるときは、前記無線機によるビーコン受信を停止することを特徴とする請求項1〜4のいずれか1項に記載の鳥獣追跡システム。
【請求項6】
前記動き感知センサが、前記鳥獣の静止状態を検知したときは、前記鳥獣タグの前記GPSセンサによる前記GPSデータ取得周期を延長させることを特徴とする請求項1〜5のいずれか1項に記載の鳥獣追跡システム。
【請求項7】
前記鳥獣タグメモリは、前記GPSデータの一つを基本データとして完全な状態で保存・送信し、その他を前記基本データとの差分情報として保存・送信することを特徴とする請求項1〜6のいずれか1項に記載の鳥獣追跡システム。
【請求項8】
前記鳥獣タグが前記鳥獣タグに割り当てられた前記ビーコン受信周期において前記GPSデータの全てを前記基地局へ送り終えないときは、前記鳥獣タグ以外の他の鳥獣タグのビーコン受信周期の時間帯において未送信の前記GPSデータを前記基地局へ送信するよう制御されていることを特徴とする請求項1〜7のいずれか1項に記載の鳥獣追跡システム。
【請求項9】
前記他の鳥獣タグの前記ビーコン受信周期の前記時間帯では、前記他の鳥獣タグに蓄積された前記GPSデータを前記未送信GPSデータより優先して前記基地局へ送信するよう制御されていることを特徴とする請求項8に記載の鳥獣追跡システム。
【請求項10】
前記他の鳥獣タグの前記ビーコン受信周期の前記時間帯では、前記GPSデータの保存領域に空きの無い前記鳥獣タグメモリを有する前記他の鳥獣タグが、前記GPSデータの保存領域に空きの有る前記鳥獣タグメモリを有する前記他の鳥獣タグよりも優先して前記GPSデータを前記基地局へ送信するよう制御されていることを特徴とする請求項8又は9に記載の鳥獣追跡システム。
【請求項11】
前記データセンタは、前記基地局を介して前記鳥獣タグから前記基本データと前記差分情報とを受信し、
前記鳥獣タグメモリは、前記データセンタにて受信が確認された前記差分情報を順次削除することを特徴とする請求項7〜10のいずれか1項に記載の鳥獣追跡システム。
【請求項12】
前記鳥獣タグがいずれの前記基地局とも通信圏外にあり、かつ、前記鳥獣タグメモリが満杯であるときは、保存された前記GPSデータを時間均等に間引くとともに、前記GPSセンサによる前記GPSデータ取得周期も前記間引間隔に併せて延長させることを特徴とする請求項1〜11のいずれか1項に記載の鳥獣追跡システム。
【請求項13】
前記GPSデータの一部を前記間引き処理の対象とせず、前記鳥獣タグメモリに優先的に保存することを特徴とする請求項12に記載の鳥獣追跡システム。
【請求項14】
前記データセンタは、前記鳥獣タグ及び前記基地局から受信した前記情報から前記基地局毎に通信圏情報と前記通信圏情報のバージョン値と作成及び更新し、全ての前記基地局の前記通信圏情報と前記バージョン値とを前記基地局の各々に送信し、
前記基地局は、前記基地局メモリにおいて前記データセンタから受信した前記通信圏情報と前記通信圏情報の前記バージョン値を保存し、前記ビーコンとともに最新の前記通信圏情報と最新の前記バージョン値とを前記鳥獣タグに送信することを特徴とする請求項1〜13のいずれかに記載の鳥獣追跡システム。
【請求項15】
前記データセンタは、前記鳥獣タグ及び前記基地局から受信した前記情報から前記基地局毎に通信圏情報と前記通信圏情報のバージョン値と作成及び更新し、全ての前記基地局の前記通信圏情報と前記バージョン値を前記基地局の各々に送信し、
前記基地局は、前記基地局メモリにおいて前記データセンタから受信した前記通信圏情報と前記通信圏情報の前記バージョン値を保存し、前記ビーコンとともに最新の前記バージョン値を前記鳥獣タグに送信し、
前記鳥獣タグは、前記最新のバージョン値を受信し、前記鳥獣タグメモリにおいて既に保存している前記バージョン値と比較し、双方の値が異なる場合には、前記基地局へ前記通信圏情報を要求し、
前記基地局は、前記要求を受信した場合には、前記ビーコン送受信以外の時間帯で前記最新の前記通信圏情報を前記鳥獣タグへ送信することを特徴とする請求項1〜13のいずれかに記載の鳥獣追跡システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−185686(P2011−185686A)
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願番号】特願2010−50022(P2010−50022)
【出願日】平成22年3月8日(2010.3.8)
【出願人】(304027279)国立大学法人 新潟大学 (310)
【Fターム(参考)】
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願日】平成22年3月8日(2010.3.8)
【出願人】(304027279)国立大学法人 新潟大学 (310)
【Fターム(参考)】
[ Back to top ]