
麺外観検査方法
【目的】 絡み合って塊状に集合した麺に付着した異物の有無を検出する麺外観検査方法を提供する。
【構成】 麺が絡み合って塊状に集合したものの外観を撮像により検査する方法であって、前記麺に撮像側に向けて透過照明を且つ撮像側から反射照明をして麺と麺との間の部分および麺表面部を明るい映像として捉える第1ステップ(5)と、前記第1ステップで得られた映像の明るさ信号を定められた閾値と比較して、前記閾値以上の明るさ信号は前記閾値の明るさ信号とする第2ステップ(11)と、前記第2ステップで得られた明るさ信号を微分する第3ステップ(12)と、前記第3ステップで得られた信号の近接する二点間の差分が定められた値以上のときは、不良と判定する第4ステップ(13)とからなる。
【構成】 麺が絡み合って塊状に集合したものの外観を撮像により検査する方法であって、前記麺に撮像側に向けて透過照明を且つ撮像側から反射照明をして麺と麺との間の部分および麺表面部を明るい映像として捉える第1ステップ(5)と、前記第1ステップで得られた映像の明るさ信号を定められた閾値と比較して、前記閾値以上の明るさ信号は前記閾値の明るさ信号とする第2ステップ(11)と、前記第2ステップで得られた明るさ信号を微分する第3ステップ(12)と、前記第3ステップで得られた信号の近接する二点間の差分が定められた値以上のときは、不良と判定する第4ステップ(13)とからなる。
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明は、例えばインスタントラーメンのような絡み合って塊状に集合した麺の自動外観検査方法に関する。
【0002】
【従来の技術】例えばインスタントラーメンの製造工程で黒色異物等が付着することがあり、異物等が付着した製品を検査によりラインから取除く必要がある。前述の検査は従来は目視により行われているが、多くの人手を要すること、又、みのがしが多いことから検査の自動化が要望され、撮像による方法が試みられている。
【0003】
【発明が解決しようとする課題】しかしながら、麺が塊状に集合したものには隙間があり、又、麺の絡み合いによる凹凸が多いので撮像による映像信号の明るさ比較のみでは、画像から異物のみを識別することが困難であるという問題がある。
【0004】本発明は、照明方法および撮像による明るさ信号の処理方法を工夫することにより、前述の問題を解消する検査方法を提供することを目的とする。
【0005】
【課題を解決するための手段】本発明の麺外観検査方法は、麺が絡み合って塊状に集合したものの外観を撮像により検査する方法であって、前記麺に撮像側に向けて透過照明を且つ撮像側から反射照明をして麺と麺との間の部分および麺表面部を明るい映像として捉える第1ステップと、前記第1ステップで得られた映像の明るさ信号を定められた閾値と比較して、前記閾値以上の明るさ信号は前記閾値の明るさ信号とする第2ステップと、前記第2ステップで得られた明るさ信号を微分する第3ステップと、前記第3ステップで得られた信号の近接する二点間の差分が定められた値以上のときは、不良と判定する第4ステップと、からなることを特徴とする。
【0006】
【作用】塊状の麺を透過照明だけで撮像すると、麺と麺との間の隙間の部分は極めて明るく麺の表面は極めて暗く映るので、麺表面に付着した異物は識別できない。また反射照明だけで撮像すると、麺の表面は明るく映るが前述の麺と麺との間の隙間の部分は照明光を反射しないので暗く映るため、異物等による暗い点と識別できない。
【0007】そこで透過照明および反射照明により撮像すると、前述の麺と麺との間の隙間の部分は極めて明るく、麺表面は明るく、麺表面の異物ならびに麺の絡み合いによる凹凸は暗く映ることになる。以上が第1ステップである。
【0008】次に、撮像により得られた明るさ信号の処理を行う。第2ステップにおいて、麺表面の明るさよりも極めて明るい部分である麺と麺との間の隙間の部分の明るさを麺表面の明るさとする。これにより極めて明るい部分と明るい部分との差により異物が存在したとみなすことがなくなる。即ち、明るい部分と暗い部分との差をみるのみとなる。
【0009】第3ステップにおいて、前述の第2ステップで得られた明るさ信号を微分する。塊状の麺には麺の絡み合いによる凹凸があるため、異物として急に暗く映る点の他に、凹凸によりゆるやかに暗く映る部分がある。急に暗く映る異物は微分することにより変化の大きな信号として捉えられ、ゆるやかに暗く映る凹凸は変化の小さい信号として捉えられることになる。
【0010】第4ステップにおいて、前述の第3ステップて得られた信号の近接する二点間の差分が定められた大きさ以上のときは、異物と判定できることになる。
【0011】
【実施例】以下、本発明の一実施例について添付図面を参照しながら説明する。
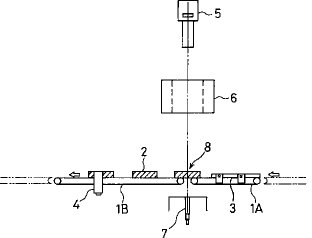
【0012】図1は、本発明の一実施例の麺外観検査装置の断面構成を示す。ベルトコンベア1A,1Bによって検査対象のインスタントラーメン等の麺2が撮像装置5の直下の所定の検査位置8に搬送される。コンベア1Aには幅寄せガイド3を備え、搬送される麺2の位置を調整する。コンベア1Aと1B間の隙間において、CCDカメラ等の撮像装置5は麺2を撮像する。麺2は撮像側に向けてライン照明装置7から透過照明が為される。また、麺2の上面には、リング照明装置6により撮像側から反射照明が為される。撮像装置5の映像信号は図示しない画像処理装置に送られ、画素毎の明るさの変化から異物の有無が演算処理により判定される。撮像位置8を通過した麺2は、コンベア1Bにより更に搬送され、図示しない画像処理装置により異物有りと判定された麺は不良としてエア排出ノズル4によりコンベア1Bから排除される。異物無しと判定された麺2はそのままコンベア1Bより次工程に送られる。
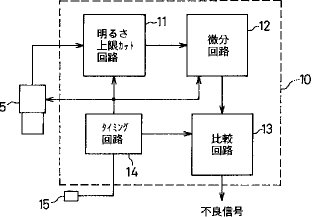
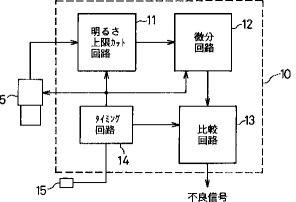
【0013】図2は、本発明の一実施例の画像処理の手順を示すブロック図である。撮像装置5により捉えられた麺2の上面の映像は一走査ライン毎に画像処理装置10の明るさ上限カット回路11に送られる。明るさ上限カット回路11では、映像の明るさ信号を定められた閾値と比較して、ある閾値以上の明るさ信号はその閾値の明るさ信号とする。
【0014】次に、明るさ上限カットされた映像信号は微分回路12に送られる。微分回路12では送られた映像信号を微分処理する。即ち、明るさがゆるやかに変化する場合には、小さな値の映像信号が出力される。逆に、明るさの変化が大きい場合には、大きな値の映像信号が出力される。
【0015】次に、微分処理された映像信号は比較回路13に送られる。比較回路13では、映像信号の近接する2点間の差分を求める。2点間の差分がある定められた値以上の時は異物有りとして不良信号を発生する。不良信号は図1に示すエア排出ノズル4により麺2を不良品としてコンベアから排除する。タイミング回路14は、撮像位置に達した麺をセンサ15で検出し、画像処理の一連のタイミングを制御する。
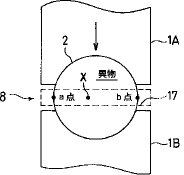
【0016】次に図3乃至図4を参照しながらこの麺外観検査装置の動作について説明する。図3は、撮像位置8における撮像装置側からみた上面図である。図中点線で示す範囲17が撮像装置により取り込まれる検査範囲である。点a及び点bはそれぞれ麺2の外縁である。麺2の点Xに黒い異物が付着していたとする。
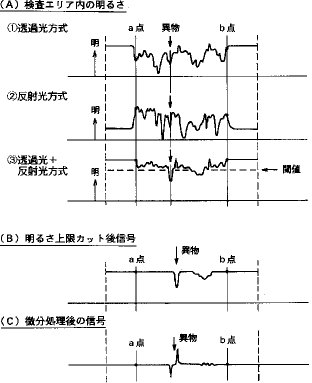
【0017】図4は、各種映像信号の説明図である。尚、画像処理装置10内の映像信号はデジタル信号に変換されデジタルで演算処理されるが、説明の便宜上本図においてはアナログで表示する。(A)は、検査エリア内の明るさを照明方式により比較したものである。■透過光方式は、麺に撮像側に向けてライン照明装置7により透過照明のみを行った場合である。麺が絡み合って塊状に集合した、上面を撮像装置5により撮像すると、点a及び点bの外側は、透過照明を受けて極めて明るくなる。又絡み合った麺と麺との間の隙間部分も透過照明を受けて極めて明るくなる。これに対して、麺と麺とが重なりあって全く光を透過させない部分は極めて暗くなる。黒い異物が付着していると、その部分は大きな明るさの変化の中に埋もれてしまい、麺表面に付着した異物は識別できない。又、■反射光方式では麺の表面は明るく映るが、麺と麺との間の隙間部分にはリング照明装置6の照明光が入らないため、暗く映る。従って、この方式でも明暗差が大きいため、黒い異物を識別することができない。本実施例の■透過光と反射光を重ねた方式によれば、麺と麺との間の部分及び麺表面部を明るい映像として捉えることができる。
【0018】しかしながら、この状態では映像信号における明暗差が大きいため、どの部分が異物の信号であるかを判定することができない。そこで、明るさ上限カット回路11を通すことにより図中の閾値以上の信号を閾値の信号に変換する。すると、麺と麺との間の隙間部分等の透過光が直接撮像された部分等の極めて明るい信号が除去される。この状態を図4(B)に明るさ上限カット後の信号として示す。しかしながら、この状態においても、麺と麺との間の隙間が深くかつ透過照明が透過しない部分は暗い部分として残る。この部分を異物と区別するために、微分回路12を通す。微分処理を行うことにより、麺と麺との間の暗い部分は信号の変化がゆるやかであるので、微分処理を行うことにより、明暗差を小さくすることができる。これに対して、異物が付着している場合は、麺と異物との境界は、ステップ状であるので、急な変化の信号として捉えられる。このため、異物の部分は微分処理により大きな信号として出力される。この状態が図4(C)に微分処理後の信号として示される。
【0019】従って、図4(C)に示す映像信号は、異物による信号のみが残っていることになる。この信号を近接する2点間の差分が定められた値以上であるかどうかの比較回路13を通すことにより異物ありと判定することができる。
【0020】尚、以上の実施例は麺が絡み合って塊状に集合したものとしてインスタントラーメンの例について説明したが、そば、うどん、中華そば、スパゲッテイ等の生麺あるいは乾麺等にも適用できることはもちろんのことである。このように、本発明の趣旨を逸脱することなく各種の変形実施例が可能である。尚、各図中同一符号は同一あるいは相当部分を示す。
【0021】
【発明の効果】以上に説明したように、本発明によればインスタントラーメン等の塊状の麺に付着した異物を検出する実用的な自動検査装置を実現できる。
【図面の簡単な説明】
【図1】本発明の一実施例の麺外観検査装置の説明図。
【図2】本発明の一実施例の麺外観検査装置における映像信号処理のブロック図。
【図3】撮像位置における麺の上面図。
【図4】各種映像信号の説明図。
【符号の説明】
1A,1B ベルトコンベア
2 麺
5 撮像装置
6 リング照明装置
7 ライン照明装置
8 撮像位置
10 画像処理装置
11 明るさ上限カット回路
12 微分回路
13 比較回路
【0001】
【産業上の利用分野】本発明は、例えばインスタントラーメンのような絡み合って塊状に集合した麺の自動外観検査方法に関する。
【0002】
【従来の技術】例えばインスタントラーメンの製造工程で黒色異物等が付着することがあり、異物等が付着した製品を検査によりラインから取除く必要がある。前述の検査は従来は目視により行われているが、多くの人手を要すること、又、みのがしが多いことから検査の自動化が要望され、撮像による方法が試みられている。
【0003】
【発明が解決しようとする課題】しかしながら、麺が塊状に集合したものには隙間があり、又、麺の絡み合いによる凹凸が多いので撮像による映像信号の明るさ比較のみでは、画像から異物のみを識別することが困難であるという問題がある。
【0004】本発明は、照明方法および撮像による明るさ信号の処理方法を工夫することにより、前述の問題を解消する検査方法を提供することを目的とする。
【0005】
【課題を解決するための手段】本発明の麺外観検査方法は、麺が絡み合って塊状に集合したものの外観を撮像により検査する方法であって、前記麺に撮像側に向けて透過照明を且つ撮像側から反射照明をして麺と麺との間の部分および麺表面部を明るい映像として捉える第1ステップと、前記第1ステップで得られた映像の明るさ信号を定められた閾値と比較して、前記閾値以上の明るさ信号は前記閾値の明るさ信号とする第2ステップと、前記第2ステップで得られた明るさ信号を微分する第3ステップと、前記第3ステップで得られた信号の近接する二点間の差分が定められた値以上のときは、不良と判定する第4ステップと、からなることを特徴とする。
【0006】
【作用】塊状の麺を透過照明だけで撮像すると、麺と麺との間の隙間の部分は極めて明るく麺の表面は極めて暗く映るので、麺表面に付着した異物は識別できない。また反射照明だけで撮像すると、麺の表面は明るく映るが前述の麺と麺との間の隙間の部分は照明光を反射しないので暗く映るため、異物等による暗い点と識別できない。
【0007】そこで透過照明および反射照明により撮像すると、前述の麺と麺との間の隙間の部分は極めて明るく、麺表面は明るく、麺表面の異物ならびに麺の絡み合いによる凹凸は暗く映ることになる。以上が第1ステップである。
【0008】次に、撮像により得られた明るさ信号の処理を行う。第2ステップにおいて、麺表面の明るさよりも極めて明るい部分である麺と麺との間の隙間の部分の明るさを麺表面の明るさとする。これにより極めて明るい部分と明るい部分との差により異物が存在したとみなすことがなくなる。即ち、明るい部分と暗い部分との差をみるのみとなる。
【0009】第3ステップにおいて、前述の第2ステップで得られた明るさ信号を微分する。塊状の麺には麺の絡み合いによる凹凸があるため、異物として急に暗く映る点の他に、凹凸によりゆるやかに暗く映る部分がある。急に暗く映る異物は微分することにより変化の大きな信号として捉えられ、ゆるやかに暗く映る凹凸は変化の小さい信号として捉えられることになる。
【0010】第4ステップにおいて、前述の第3ステップて得られた信号の近接する二点間の差分が定められた大きさ以上のときは、異物と判定できることになる。
【0011】
【実施例】以下、本発明の一実施例について添付図面を参照しながら説明する。
【0012】図1は、本発明の一実施例の麺外観検査装置の断面構成を示す。ベルトコンベア1A,1Bによって検査対象のインスタントラーメン等の麺2が撮像装置5の直下の所定の検査位置8に搬送される。コンベア1Aには幅寄せガイド3を備え、搬送される麺2の位置を調整する。コンベア1Aと1B間の隙間において、CCDカメラ等の撮像装置5は麺2を撮像する。麺2は撮像側に向けてライン照明装置7から透過照明が為される。また、麺2の上面には、リング照明装置6により撮像側から反射照明が為される。撮像装置5の映像信号は図示しない画像処理装置に送られ、画素毎の明るさの変化から異物の有無が演算処理により判定される。撮像位置8を通過した麺2は、コンベア1Bにより更に搬送され、図示しない画像処理装置により異物有りと判定された麺は不良としてエア排出ノズル4によりコンベア1Bから排除される。異物無しと判定された麺2はそのままコンベア1Bより次工程に送られる。
【0013】図2は、本発明の一実施例の画像処理の手順を示すブロック図である。撮像装置5により捉えられた麺2の上面の映像は一走査ライン毎に画像処理装置10の明るさ上限カット回路11に送られる。明るさ上限カット回路11では、映像の明るさ信号を定められた閾値と比較して、ある閾値以上の明るさ信号はその閾値の明るさ信号とする。
【0014】次に、明るさ上限カットされた映像信号は微分回路12に送られる。微分回路12では送られた映像信号を微分処理する。即ち、明るさがゆるやかに変化する場合には、小さな値の映像信号が出力される。逆に、明るさの変化が大きい場合には、大きな値の映像信号が出力される。
【0015】次に、微分処理された映像信号は比較回路13に送られる。比較回路13では、映像信号の近接する2点間の差分を求める。2点間の差分がある定められた値以上の時は異物有りとして不良信号を発生する。不良信号は図1に示すエア排出ノズル4により麺2を不良品としてコンベアから排除する。タイミング回路14は、撮像位置に達した麺をセンサ15で検出し、画像処理の一連のタイミングを制御する。
【0016】次に図3乃至図4を参照しながらこの麺外観検査装置の動作について説明する。図3は、撮像位置8における撮像装置側からみた上面図である。図中点線で示す範囲17が撮像装置により取り込まれる検査範囲である。点a及び点bはそれぞれ麺2の外縁である。麺2の点Xに黒い異物が付着していたとする。
【0017】図4は、各種映像信号の説明図である。尚、画像処理装置10内の映像信号はデジタル信号に変換されデジタルで演算処理されるが、説明の便宜上本図においてはアナログで表示する。(A)は、検査エリア内の明るさを照明方式により比較したものである。
【0018】しかしながら、この状態では映像信号における明暗差が大きいため、どの部分が異物の信号であるかを判定することができない。そこで、明るさ上限カット回路11を通すことにより図中の閾値以上の信号を閾値の信号に変換する。すると、麺と麺との間の隙間部分等の透過光が直接撮像された部分等の極めて明るい信号が除去される。この状態を図4(B)に明るさ上限カット後の信号として示す。しかしながら、この状態においても、麺と麺との間の隙間が深くかつ透過照明が透過しない部分は暗い部分として残る。この部分を異物と区別するために、微分回路12を通す。微分処理を行うことにより、麺と麺との間の暗い部分は信号の変化がゆるやかであるので、微分処理を行うことにより、明暗差を小さくすることができる。これに対して、異物が付着している場合は、麺と異物との境界は、ステップ状であるので、急な変化の信号として捉えられる。このため、異物の部分は微分処理により大きな信号として出力される。この状態が図4(C)に微分処理後の信号として示される。
【0019】従って、図4(C)に示す映像信号は、異物による信号のみが残っていることになる。この信号を近接する2点間の差分が定められた値以上であるかどうかの比較回路13を通すことにより異物ありと判定することができる。
【0020】尚、以上の実施例は麺が絡み合って塊状に集合したものとしてインスタントラーメンの例について説明したが、そば、うどん、中華そば、スパゲッテイ等の生麺あるいは乾麺等にも適用できることはもちろんのことである。このように、本発明の趣旨を逸脱することなく各種の変形実施例が可能である。尚、各図中同一符号は同一あるいは相当部分を示す。
【0021】
【発明の効果】以上に説明したように、本発明によればインスタントラーメン等の塊状の麺に付着した異物を検出する実用的な自動検査装置を実現できる。
【図面の簡単な説明】
【図1】本発明の一実施例の麺外観検査装置の説明図。
【図2】本発明の一実施例の麺外観検査装置における映像信号処理のブロック図。
【図3】撮像位置における麺の上面図。
【図4】各種映像信号の説明図。
【符号の説明】
1A,1B ベルトコンベア
2 麺
5 撮像装置
6 リング照明装置
7 ライン照明装置
8 撮像位置
10 画像処理装置
11 明るさ上限カット回路
12 微分回路
13 比較回路
【特許請求の範囲】
【請求項1】 麺が絡み合って塊状に集合したものの外観を撮像により検査する方法であって、前記麺に撮像側に向けて透過照明を且つ撮像側から反射照明をして麺と麺との間の部分および麺表面部を明るい映像として捉える第1ステップと、前記第1ステップで得られた映像の明るさ信号を定められた閾値と比較して、前記閾値以上の明るさ信号は前記閾値の明るさ信号とする第2ステップと、前記第2ステップで得られた明るさ信号を微分する第3ステップと、前記第3ステップで得られた信号の近接する二点間の差分が定められた値以上のときは、不良と判定する第4ステップと、からなることを特徴とする麺外観検査方法。
【請求項1】 麺が絡み合って塊状に集合したものの外観を撮像により検査する方法であって、前記麺に撮像側に向けて透過照明を且つ撮像側から反射照明をして麺と麺との間の部分および麺表面部を明るい映像として捉える第1ステップと、前記第1ステップで得られた映像の明るさ信号を定められた閾値と比較して、前記閾値以上の明るさ信号は前記閾値の明るさ信号とする第2ステップと、前記第2ステップで得られた明るさ信号を微分する第3ステップと、前記第3ステップで得られた信号の近接する二点間の差分が定められた値以上のときは、不良と判定する第4ステップと、からなることを特徴とする麺外観検査方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開平7−146252
【公開日】平成7年(1995)6月6日
【国際特許分類】
【出願番号】特願平5−317357
【出願日】平成5年(1993)11月24日
【出願人】(390014661)株式会社キリンテクノシステム (126)
【公開日】平成7年(1995)6月6日
【国際特許分類】
【出願日】平成5年(1993)11月24日
【出願人】(390014661)株式会社キリンテクノシステム (126)
[ Back to top ]