
1軸1舵船の定点位置保持方法とその装置
【課題】 1軸1舵船において、船舶を安定して定点保持できる定点位置保持方法を提供すること。
【解決手段】 船体6の目標位置側を目標位置TPに向けるように船首5の方位を制御するとともに、この目標位置TPに対する現船位SPの相対位置が前後方向にずれている場合は前後進制御によって船位SPを目標位置TPに留めるように制御し、この目標位置TPに対する現船位SPの相対位置が左右方向にずれている場合は左右進制御によって船位SPを目標位置TPに留めるように制御して、前後左右の制御の切り換えにより船位SPを目標位置TPに留める。
【解決手段】 船体6の目標位置側を目標位置TPに向けるように船首5の方位を制御するとともに、この目標位置TPに対する現船位SPの相対位置が前後方向にずれている場合は前後進制御によって船位SPを目標位置TPに留めるように制御し、この目標位置TPに対する現船位SPの相対位置が左右方向にずれている場合は左右進制御によって船位SPを目標位置TPに留めるように制御して、前後左右の制御の切り換えにより船位SPを目標位置TPに留める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶を定点位置に保持するための方法とその装置に関し、詳しくは、1軸1舵の推進機数が少ない船舶における定点位置保持方法とその装置に関するものである。
【背景技術】
【0002】
従来より、観測船や海洋調査船等の母船のように、特定の位置で定点保持させておく必要がある船舶においては、一般的に、船体位置観測をGPS(global positioning system) 、船首方位観測をジャイロコンパスで行い、船体位置と船首方位の自動制御を行う自動定点保持システム(以下、「DPS(Dynamic Postioning System)」という)を搭載している。
【0003】
一方、このような船舶において、1軸1舵船のように推進機の数が少ない場合、操船操作量の自由度が低く定点保持が難しい。そのため、1軸1舵船のような場合、船首側にサイドスラスタ(以下、「バウスラスタ」という。)を設けて操作量の数を増やそうとしたものがある。
【0004】
また、このような船舶の場合、船尾側に設けるプロペラに可変ピッチプロペラを採用し、ピッチ角変更によって前進推力と後進推力とが出せるようにする場合がある。さらに、制御性能を向上させるために高揚力舵を設ける場合もある。高揚力舵は、通常の舵に比べて舵角が大きく、例えば、右舷、左舷ともに70度の舵角が可能で、舵角を70度にした場合、横方向の推力を発生させることができる。したがって、高揚力舵を搭載した船舶では、大舵角をとることにより船尾において真横力を出すことができるため、バウスラスタと組み合わせることにより船舶を真横方向に移動させることができる。
【0005】
この種の従来技術として、例えば、図5の船舶の位置制御を模式的に示す平面図のように、常に目標位置TPに船首方位を向け、前進制御を行うことにより船位SP(以下の図面では、船体の中心部に「+」で示す。)を目標位置TPに留めようとするものがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第2926533号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、前記1軸1舵の構成の場合、横方向の推力と同時に前後方向の推力とを出すことができないため、船位を定点保持するために前後、左右方向の2つを同時に制御することができず、定点位置に船位を常に留めることは難しい。
【0008】
また、前記特許文献1の場合、目標位置と現船位の相対位置関係が、所望の方位から大きく回頭してしまう場合がある。この場合、船位は保持できるものの目標方位を保持できない。また、目標位置からのずれの方向によっては船首方位を大きく変更させる必要があり、船体の姿勢制御に多くの時間とエネルギを要する場合がある。
【0009】
さらに、船舶が前記海洋調査船の母船のような場合、その母船で曳航している曳航体に繋がれたロープが船体の回頭によってねじれる場合がある。このロープのねじれは、配線等にもねじれを生じさせて調査に支障を来す場合がある。
【0010】
そこで、本発明は、1軸1舵船において、船首方位を所定の方向に向けながら安定して定点保持できる定点位置保持方法とその装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
前記目的を達成するために、本発明における1軸1舵船の定点位置保持方法は、船首方位を常に制御でき、かつ前後方向と左右方向とを同時に制御できない船舶において、船体の目標位置側を目標位置に向けるように船首方位を制御するとともに、該目標位置に対する現船位の相対位置が前後方向にずれている場合は前後進制御によって船位を目標位置に留めるように制御し、該目標位置に対する現船位の相対位置が左右方向にずれている場合は左右進制御によって船位を目標位置に留めるように制御し、前後進制御と左右進制御とを切り換えて船位を目標位置に留めるようにしている。これにより、船首方位を常に制御でき、かつ前後方向と左右方向とを同時に制御できない船舶であっても、現船位に対して目標位置が船首又は船尾方向にずれている場合は船体の前後進制御と方位制御とを行い、左舷又は右舷方向にずれている場合は、船体の左右進制御と方位制御とを行うようにし、目標位置と現船位との相対位置関係により前後進制御と左右進制御とを切り換えて船位を目標位置に留める動作を繰り返し、船首方位を目標方位から大きく外すことなく、船位を目標位置に留めることができる。
【0012】
また、前記目標位置を中心とする目標範囲と、該目標範囲を含む制御範囲とを設定し、船位が前記目標範囲の内に入ったら船首方位を目標方位に制御する船首優先制御を行い、船位が前記制御範囲の外に出たら前後方向又は左右方向の制御と方位制御とをする位置回復制御を行うようにしてもよい。これにより、目標位置に近い目標範囲内では方位の制御のみを行う船首優先制御とし、目標位置から外れた制御範囲では前後進方向又は左右進方向の制御と方位制御とを行う位置回復制御として、目標位置に対する船体位置の距離に応じて制御を効率的に行うことができる。なお、船首方位優先制御において前後制御または左右制御を行ってもよい。
【0013】
さらに、前記船舶が、測位センサと船首方位角センサとを有し、船首側にサイドスラスタを備え、船尾側に可変ピッチプロペラと高揚力舵とを備えた船舶であれば、設備費用を抑えて、船首方位を常に制御でき、かつ前後進方向又は左右進方向を切り換えて定点保持が制御できる船舶を構成することができる。
【0014】
一方、本発明における1軸1舵船の定点位置保持装置は、船首方位を常に制御でき、かつ前後方向と左右方向とを同時に制御できない船舶に、船体の目標位置側を目標位置に向けるように船首方位を制御する機能と、該目標位置に対する現船位の相対位置が前後方向にずれている場合は前後進制御によって船位を目標位置に留めるように制御する機能と、該目標位置に対する現船位の相対位置が左右方向にずれている場合は左右進制御によって船位を目標位置に留めるように制御する機能と、を備えた制御装置を設け、該制御装置に、前記前後進制御と左右進制御とを切り換えて船位を目標位置に留める機能を備えさせている。この装置によれば、船首方位を常に制御でき、かつ前後方向と左右方向とを同時に制御できない船舶であっても、現船位に対して目標位置が船首又は船尾方向にずれている場合は船体の前後進制御と方位制御とを行い、左舷又は右舷方向にずれている場合は、船体の左右進制御と方位制御とを行うようにし、目標位置と現船位との相対位置関係により前後進制御と左右進制御とを切り換えて船位を目標位置に留める動作を繰り返し、船首方位を目標方位から大きく外すことなく、船位を目標位置に留めることができる。
【0015】
また、前記制御装置に、前記目標位置を中心とする目標範囲と、該目標範囲を含む制御範囲とを設定する機能を備えさせ、該制御装置に、船位が前記目標範囲の内に入ったら船首方位を目標方位に制御する船首優先制御を行い、船位が前記制御範囲の外に出たら前後進方向又は左右進方向の制御と方位制御とをする位置回復制御を行う機能を備えさせてもよい。これにより、目標位置に近い目標範囲内では方位の制御のみを行う船首優先制御とし、目標位置から外れた制御範囲では前後進方向又は左右進方向の制御と方位制御とを行う位置回復制御として、目標位置に対する船体位置の距離に応じて制御を効率的に行うことができる。
【0016】
さらに、前記船舶が、測位センサと船首方位角センサとを有し、船首側にサイドスラスタを備え、船尾側に可変ピッチプロペラと高揚力舵とを備えた船舶であれば、設備費用を抑えて、船首方位を常に制御でき、かつ前後進方向又は左右進方向を切り換えて定点保持が制御できる船舶を構成することができる。
【発明の効果】
【0017】
本発明は、以上説明したような手段により、前後方向と左右方向とを同時に制御できない船舶において、所望の船首方位から大きく回頭させることなく目標位置に安定して保持することが可能となる。
【図面の簡単な説明】
【0018】
【図1】本発明に係る位置制御装置を搭載した船舶の一実施の形態を模式的に示す平面図であり、(a) は前後進時の平面図、(b) は右進時の平面図、(c) は左進時の平面図である。
【図2】図1の定点保持装置による位置制御方法を模式的に示す平面図である。
【図3】図2に示す位置制御方法における切り換えを示すフローチャートである。
【図4】図2の位置制御における位置回復制御を模式的に示す平面図である。
【図5】従来の船舶の位置制御を模式的に示す平面図である。
【発明を実施するための形態】
【0019】
以下、本発明の一実施の形態を図面に基づいて説明する。図1は、本発明に係る位置制御装置を搭載した船舶の一実施の形態を模式的に示す平面図であり、(a) は前後進時の平面図、(b) は右進時の平面図、(c) は左進時の平面図である。図2は、図1の定点保持装置による位置制御方法を模式的に示す平面図であり、図3は、図2に示す位置制御方法における切り換えを示すフローチャート、図4は、図2の位置制御における位置回復制御を模式的に示す平面図である。
【0020】
図1に示す船舶1には、GPS(Global Positioning System) 等を利用した測位センサと、ジャイロコンパス式や、マグネットコンパス式等の船首方位角センサとを備えた定点位置保持装置2が搭載されており、自船の位置と船首方位とが常に制御できるようになっている。このような定点位置保持装置2としては、多くの船舶に自動船位保持システム(DPS:Dynamic Postioning System)が搭載されている。
【0021】
この船舶1は、1つの駆動軸にプロペラ3が備えられた1軸船であるとともに、プロペラ3の後方に1つの舵7が設けられた1舵船である。このプロペラ3として、この実施の形態では可変ピッチプロペラ(CPP)が採用されており、プロペラ3のピッチ角を変更することによって前進推力又は後進推力を発生させることができる。また、船舶1には、船首側にサイドスラスタ4(以下、「バウスラスタ」という。)が搭載されている。このバウスラスタ4は、船首5側に設置されて船体6に横方向の推力を与える。
【0022】
さらに、前記舵7として、この実施の形態では舵角を70度まで切ることができる高揚力舵7が採用されている。高揚力舵7は、舵角を70度とすれば、プロペラ3の水流による前進推力と舵力の後進方向反力とが釣り合い、プロペラ推力に比例した真横方向の横力のみを発生させることができる。
【0023】
したがって、この舵7を中立として前記プロペラ3で前進推力を発生させれば船舶1は前進し、プロペラ3で後進推力を発生させれば船舶1は後進する(図1(a) )。また、舵7の左右方向の舵角を制御してプロペラによる前進推力を発生させて前記横力を発生させるとともに、前記バウスラスタ4で横方向の推力を発生させることにより、船舶1を左進又は右進させることができる(図1(b),(c) )。
【0024】
このように、前記船舶1は、定点位置保持装置2を備える1軸1舵の船舶であって、船首5の方位は常に制御できるが、船体6の前後方向と左右方向とを同時に制御できない船舶であり、この船体6の前後方向制御と左右横方向制御とを、プロペラ3の推力発生方向と舵7の舵角とによる推力方向と、バウスラスタ4の推力発生方向との組み合わせによって切り換えることができるように構成されている。
【0025】
図2,3に基いて、このような1軸1舵で、バウスラスタ4を有する船舶1の位置制御方法を以下に説明する。まず、図2に示すように、船位SPを保持する目標位置(目標船位)と船首方位方向が与えられたとき、目標方位方向をx軸とするxy直交座標系を設定する。この座標系のx軸とy軸との交点である原点(中心)が目標位置TPである。つぎに、この目標位置TPを中心とする大小2つの制御範囲を設定する。この実施の形態では、2つの円RC,ACによって制御範囲が設定されている。2つの円RC,ACは、小さい円が目標円RCであり、この目標円RCを含む大きい円が制御円ACである。このように制御範囲となる2つの円RC,ACを設定し、船位SPがこれらの円RC,ACの内か外かによって、次のように異なる制御方法(モード)によって制御される。
【0026】
図3に示すように、船首優先制御8を行っている状態で、船位SPが制御円ACを出ると、位置回復制御9となる。この位置回復制御9では、船首方位制御と前後方向又は左右方向制御の切り換えとが行われ、船位SPを目標位置TP(原点)に復帰させるような制御となる。その後、この位置回復制御によって船位SPが目標円RC内に入ると、その後は前記船首優先制御8による制御に切り換えられる。この船首優先制御8では、船首方位と前後方向の制御とが行われ、船首5をx軸方向(目標方位方向)に向けて保持するような制御となる。
【0027】
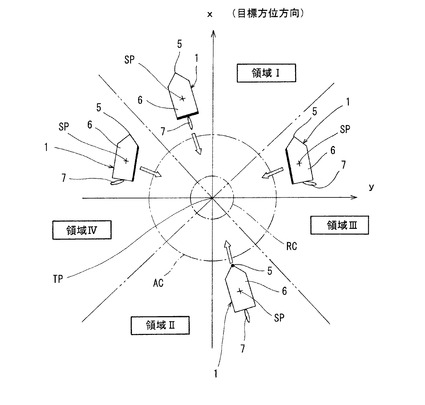
図4に基いて、前記位置回復制御9の詳細を以下に説明する。この位置回復制御9においては、前記直交座標系を平面視において4つの領域I、II、III、IVに分け、船位SPの存在する領域によって、以下のように制御が切り換えられる。4つの領域は、x軸とy軸との交点である目標位置TPを中心とした目標円RCと制御円ACとを含む360度の領域を仮想的に分割したものであり、目標方位方向の船首側に位置するx軸を中心とした90度の範囲を領域Iとし、反目標方位方向の船尾側に位置するx軸を中心とした90度の範囲を領域IIとし、目標方位方向を向いて右舷側に位置するy軸を中心とした90度の範囲を領域IIIとし、目標方位方向を向いて左舷側に位置するy軸を中心とした90度の範囲を領域IVとしている。
【0028】
まず、この図における船舶1は、目標位置TPから離れたとしても、船体6の目標位置側の面(図に太線で示す面。船首は点で示す。)が目標位置TPに向くような姿勢制御が行われている。すなわち、船舶1は、目標位置TPから離れても、領域Iの場合は船尾が目標位置TPに向き、領域IIの場合は船首が目標位置TPに向き、領域IIIの場合は左舷が目標位置TPに向き、領域IVの場合は右舷が目標位置TPに向くように、常に船体6の姿勢が制御されている。
【0029】
そして、船位SPが位置する前記4つの領域I、II、III、IVに応じて、以下のように制御される。領域Iに船位SPがずれている場合、舵7を中立とし、船尾を目標位置TPの方向に向けながら目標位置TPまで後進制御される。領域IIに船位SPがずれている場合、舵7を中立とし、船首5を目標位置TPの方向に向けながら目標位置TPまで前進制御される。領域IIIに船位SPがずれている場合、舵7を右舷70度とし、左舷を目標位置TPの方向に向けながら目標位置TPまで左進制御される。領域IVに船位SPがずれている場合、舵7を左舷70度とし、右舷を目標位置TPの方向に向けながら目標位置TPまで右進制御される。
【0030】
このように、目標位置TPと現船位SPとの相対位置関係により、前後進制御と左右進制御とを切り換えて船位SPを目標位置TPに留めるように制御するので、船体6の姿勢を大きく変更する制御を行うことなく、1軸1舵の船舶1を目標位置TP(定点位置)に安定して留めることができる。
【0031】
なお、前記実施の形態ではプロペラ3に可変ピッチプロペラ3を採用しているため、プロペラピッチ角の変更によって大きな前進推力又は後進推力を発生させることができるので、後進時も迅速な船位制御が行える。このプロペラ3に固定プロペラを採用した場合、正回転と逆回転とにより、前進推力又は後進推力を発生させることができるので、その場合も船位制御は可能であり、プロペラ3の形式は前記実施の形態に限定されるものではない。
【0032】
また、前記実施の形態では制御範囲を2つの円RC,ACとしたが、制御範囲は円形以外であってもよく、前記実施の形態に限定されるものではない。
【0033】
さらに、前述した実施の形態は一例を示しており、本発明の要旨を損なわない範囲での種々の変更は可能であり、本発明は前述した実施の形態に限定されるものではない。
【産業上の利用可能性】
【0034】
本発明に係る1軸1舵船の定点位置保持方法は、GPS等の測位センサとジャイロコンパス等の船首方位角センサとを有して船首方向を常に制御できるが、前後方向と左右方向とを同時に制御できない船舶に適用できる。
【符号の説明】
【0035】
1…船舶
2…定点位置保持装置
3…プロペラ
4…サイドスラスタ(バウスラスタ)
5…船首
6…船体
7…舵(高揚力舵)
8…船首優先制御
9…位置回復制御
RC…目標円
AC…制御円
SP…船位
TP…目標位置
【技術分野】
【0001】
本発明は、船舶を定点位置に保持するための方法とその装置に関し、詳しくは、1軸1舵の推進機数が少ない船舶における定点位置保持方法とその装置に関するものである。
【背景技術】
【0002】
従来より、観測船や海洋調査船等の母船のように、特定の位置で定点保持させておく必要がある船舶においては、一般的に、船体位置観測をGPS(global positioning system) 、船首方位観測をジャイロコンパスで行い、船体位置と船首方位の自動制御を行う自動定点保持システム(以下、「DPS(Dynamic Postioning System)」という)を搭載している。
【0003】
一方、このような船舶において、1軸1舵船のように推進機の数が少ない場合、操船操作量の自由度が低く定点保持が難しい。そのため、1軸1舵船のような場合、船首側にサイドスラスタ(以下、「バウスラスタ」という。)を設けて操作量の数を増やそうとしたものがある。
【0004】
また、このような船舶の場合、船尾側に設けるプロペラに可変ピッチプロペラを採用し、ピッチ角変更によって前進推力と後進推力とが出せるようにする場合がある。さらに、制御性能を向上させるために高揚力舵を設ける場合もある。高揚力舵は、通常の舵に比べて舵角が大きく、例えば、右舷、左舷ともに70度の舵角が可能で、舵角を70度にした場合、横方向の推力を発生させることができる。したがって、高揚力舵を搭載した船舶では、大舵角をとることにより船尾において真横力を出すことができるため、バウスラスタと組み合わせることにより船舶を真横方向に移動させることができる。
【0005】
この種の従来技術として、例えば、図5の船舶の位置制御を模式的に示す平面図のように、常に目標位置TPに船首方位を向け、前進制御を行うことにより船位SP(以下の図面では、船体の中心部に「+」で示す。)を目標位置TPに留めようとするものがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第2926533号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、前記1軸1舵の構成の場合、横方向の推力と同時に前後方向の推力とを出すことができないため、船位を定点保持するために前後、左右方向の2つを同時に制御することができず、定点位置に船位を常に留めることは難しい。
【0008】
また、前記特許文献1の場合、目標位置と現船位の相対位置関係が、所望の方位から大きく回頭してしまう場合がある。この場合、船位は保持できるものの目標方位を保持できない。また、目標位置からのずれの方向によっては船首方位を大きく変更させる必要があり、船体の姿勢制御に多くの時間とエネルギを要する場合がある。
【0009】
さらに、船舶が前記海洋調査船の母船のような場合、その母船で曳航している曳航体に繋がれたロープが船体の回頭によってねじれる場合がある。このロープのねじれは、配線等にもねじれを生じさせて調査に支障を来す場合がある。
【0010】
そこで、本発明は、1軸1舵船において、船首方位を所定の方向に向けながら安定して定点保持できる定点位置保持方法とその装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
前記目的を達成するために、本発明における1軸1舵船の定点位置保持方法は、船首方位を常に制御でき、かつ前後方向と左右方向とを同時に制御できない船舶において、船体の目標位置側を目標位置に向けるように船首方位を制御するとともに、該目標位置に対する現船位の相対位置が前後方向にずれている場合は前後進制御によって船位を目標位置に留めるように制御し、該目標位置に対する現船位の相対位置が左右方向にずれている場合は左右進制御によって船位を目標位置に留めるように制御し、前後進制御と左右進制御とを切り換えて船位を目標位置に留めるようにしている。これにより、船首方位を常に制御でき、かつ前後方向と左右方向とを同時に制御できない船舶であっても、現船位に対して目標位置が船首又は船尾方向にずれている場合は船体の前後進制御と方位制御とを行い、左舷又は右舷方向にずれている場合は、船体の左右進制御と方位制御とを行うようにし、目標位置と現船位との相対位置関係により前後進制御と左右進制御とを切り換えて船位を目標位置に留める動作を繰り返し、船首方位を目標方位から大きく外すことなく、船位を目標位置に留めることができる。
【0012】
また、前記目標位置を中心とする目標範囲と、該目標範囲を含む制御範囲とを設定し、船位が前記目標範囲の内に入ったら船首方位を目標方位に制御する船首優先制御を行い、船位が前記制御範囲の外に出たら前後方向又は左右方向の制御と方位制御とをする位置回復制御を行うようにしてもよい。これにより、目標位置に近い目標範囲内では方位の制御のみを行う船首優先制御とし、目標位置から外れた制御範囲では前後進方向又は左右進方向の制御と方位制御とを行う位置回復制御として、目標位置に対する船体位置の距離に応じて制御を効率的に行うことができる。なお、船首方位優先制御において前後制御または左右制御を行ってもよい。
【0013】
さらに、前記船舶が、測位センサと船首方位角センサとを有し、船首側にサイドスラスタを備え、船尾側に可変ピッチプロペラと高揚力舵とを備えた船舶であれば、設備費用を抑えて、船首方位を常に制御でき、かつ前後進方向又は左右進方向を切り換えて定点保持が制御できる船舶を構成することができる。
【0014】
一方、本発明における1軸1舵船の定点位置保持装置は、船首方位を常に制御でき、かつ前後方向と左右方向とを同時に制御できない船舶に、船体の目標位置側を目標位置に向けるように船首方位を制御する機能と、該目標位置に対する現船位の相対位置が前後方向にずれている場合は前後進制御によって船位を目標位置に留めるように制御する機能と、該目標位置に対する現船位の相対位置が左右方向にずれている場合は左右進制御によって船位を目標位置に留めるように制御する機能と、を備えた制御装置を設け、該制御装置に、前記前後進制御と左右進制御とを切り換えて船位を目標位置に留める機能を備えさせている。この装置によれば、船首方位を常に制御でき、かつ前後方向と左右方向とを同時に制御できない船舶であっても、現船位に対して目標位置が船首又は船尾方向にずれている場合は船体の前後進制御と方位制御とを行い、左舷又は右舷方向にずれている場合は、船体の左右進制御と方位制御とを行うようにし、目標位置と現船位との相対位置関係により前後進制御と左右進制御とを切り換えて船位を目標位置に留める動作を繰り返し、船首方位を目標方位から大きく外すことなく、船位を目標位置に留めることができる。
【0015】
また、前記制御装置に、前記目標位置を中心とする目標範囲と、該目標範囲を含む制御範囲とを設定する機能を備えさせ、該制御装置に、船位が前記目標範囲の内に入ったら船首方位を目標方位に制御する船首優先制御を行い、船位が前記制御範囲の外に出たら前後進方向又は左右進方向の制御と方位制御とをする位置回復制御を行う機能を備えさせてもよい。これにより、目標位置に近い目標範囲内では方位の制御のみを行う船首優先制御とし、目標位置から外れた制御範囲では前後進方向又は左右進方向の制御と方位制御とを行う位置回復制御として、目標位置に対する船体位置の距離に応じて制御を効率的に行うことができる。
【0016】
さらに、前記船舶が、測位センサと船首方位角センサとを有し、船首側にサイドスラスタを備え、船尾側に可変ピッチプロペラと高揚力舵とを備えた船舶であれば、設備費用を抑えて、船首方位を常に制御でき、かつ前後進方向又は左右進方向を切り換えて定点保持が制御できる船舶を構成することができる。
【発明の効果】
【0017】
本発明は、以上説明したような手段により、前後方向と左右方向とを同時に制御できない船舶において、所望の船首方位から大きく回頭させることなく目標位置に安定して保持することが可能となる。
【図面の簡単な説明】
【0018】
【図1】本発明に係る位置制御装置を搭載した船舶の一実施の形態を模式的に示す平面図であり、(a) は前後進時の平面図、(b) は右進時の平面図、(c) は左進時の平面図である。
【図2】図1の定点保持装置による位置制御方法を模式的に示す平面図である。
【図3】図2に示す位置制御方法における切り換えを示すフローチャートである。
【図4】図2の位置制御における位置回復制御を模式的に示す平面図である。
【図5】従来の船舶の位置制御を模式的に示す平面図である。
【発明を実施するための形態】
【0019】
以下、本発明の一実施の形態を図面に基づいて説明する。図1は、本発明に係る位置制御装置を搭載した船舶の一実施の形態を模式的に示す平面図であり、(a) は前後進時の平面図、(b) は右進時の平面図、(c) は左進時の平面図である。図2は、図1の定点保持装置による位置制御方法を模式的に示す平面図であり、図3は、図2に示す位置制御方法における切り換えを示すフローチャート、図4は、図2の位置制御における位置回復制御を模式的に示す平面図である。
【0020】
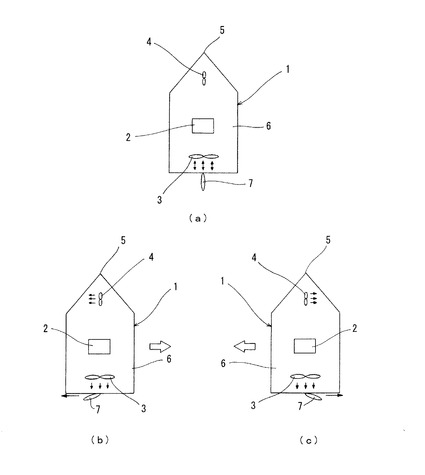
図1に示す船舶1には、GPS(Global Positioning System) 等を利用した測位センサと、ジャイロコンパス式や、マグネットコンパス式等の船首方位角センサとを備えた定点位置保持装置2が搭載されており、自船の位置と船首方位とが常に制御できるようになっている。このような定点位置保持装置2としては、多くの船舶に自動船位保持システム(DPS:Dynamic Postioning System)が搭載されている。
【0021】
この船舶1は、1つの駆動軸にプロペラ3が備えられた1軸船であるとともに、プロペラ3の後方に1つの舵7が設けられた1舵船である。このプロペラ3として、この実施の形態では可変ピッチプロペラ(CPP)が採用されており、プロペラ3のピッチ角を変更することによって前進推力又は後進推力を発生させることができる。また、船舶1には、船首側にサイドスラスタ4(以下、「バウスラスタ」という。)が搭載されている。このバウスラスタ4は、船首5側に設置されて船体6に横方向の推力を与える。
【0022】
さらに、前記舵7として、この実施の形態では舵角を70度まで切ることができる高揚力舵7が採用されている。高揚力舵7は、舵角を70度とすれば、プロペラ3の水流による前進推力と舵力の後進方向反力とが釣り合い、プロペラ推力に比例した真横方向の横力のみを発生させることができる。
【0023】
したがって、この舵7を中立として前記プロペラ3で前進推力を発生させれば船舶1は前進し、プロペラ3で後進推力を発生させれば船舶1は後進する(図1(a) )。また、舵7の左右方向の舵角を制御してプロペラによる前進推力を発生させて前記横力を発生させるとともに、前記バウスラスタ4で横方向の推力を発生させることにより、船舶1を左進又は右進させることができる(図1(b),(c) )。
【0024】
このように、前記船舶1は、定点位置保持装置2を備える1軸1舵の船舶であって、船首5の方位は常に制御できるが、船体6の前後方向と左右方向とを同時に制御できない船舶であり、この船体6の前後方向制御と左右横方向制御とを、プロペラ3の推力発生方向と舵7の舵角とによる推力方向と、バウスラスタ4の推力発生方向との組み合わせによって切り換えることができるように構成されている。
【0025】
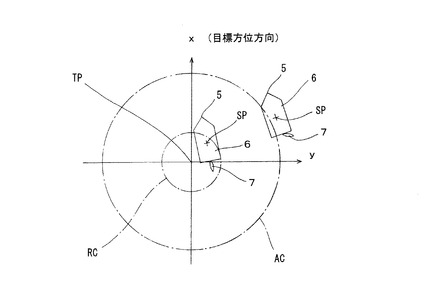
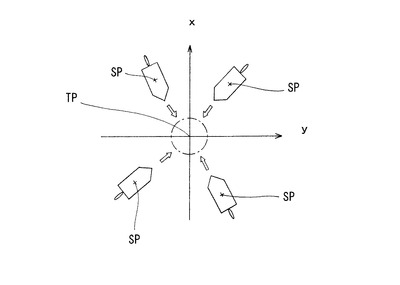
図2,3に基いて、このような1軸1舵で、バウスラスタ4を有する船舶1の位置制御方法を以下に説明する。まず、図2に示すように、船位SPを保持する目標位置(目標船位)と船首方位方向が与えられたとき、目標方位方向をx軸とするxy直交座標系を設定する。この座標系のx軸とy軸との交点である原点(中心)が目標位置TPである。つぎに、この目標位置TPを中心とする大小2つの制御範囲を設定する。この実施の形態では、2つの円RC,ACによって制御範囲が設定されている。2つの円RC,ACは、小さい円が目標円RCであり、この目標円RCを含む大きい円が制御円ACである。このように制御範囲となる2つの円RC,ACを設定し、船位SPがこれらの円RC,ACの内か外かによって、次のように異なる制御方法(モード)によって制御される。
【0026】
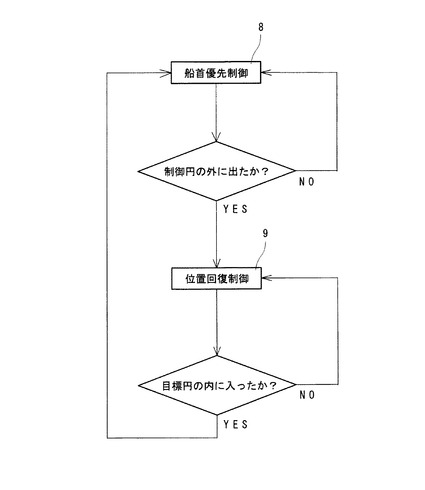
図3に示すように、船首優先制御8を行っている状態で、船位SPが制御円ACを出ると、位置回復制御9となる。この位置回復制御9では、船首方位制御と前後方向又は左右方向制御の切り換えとが行われ、船位SPを目標位置TP(原点)に復帰させるような制御となる。その後、この位置回復制御によって船位SPが目標円RC内に入ると、その後は前記船首優先制御8による制御に切り換えられる。この船首優先制御8では、船首方位と前後方向の制御とが行われ、船首5をx軸方向(目標方位方向)に向けて保持するような制御となる。
【0027】
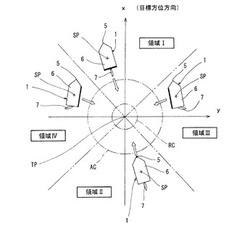
図4に基いて、前記位置回復制御9の詳細を以下に説明する。この位置回復制御9においては、前記直交座標系を平面視において4つの領域I、II、III、IVに分け、船位SPの存在する領域によって、以下のように制御が切り換えられる。4つの領域は、x軸とy軸との交点である目標位置TPを中心とした目標円RCと制御円ACとを含む360度の領域を仮想的に分割したものであり、目標方位方向の船首側に位置するx軸を中心とした90度の範囲を領域Iとし、反目標方位方向の船尾側に位置するx軸を中心とした90度の範囲を領域IIとし、目標方位方向を向いて右舷側に位置するy軸を中心とした90度の範囲を領域IIIとし、目標方位方向を向いて左舷側に位置するy軸を中心とした90度の範囲を領域IVとしている。
【0028】
まず、この図における船舶1は、目標位置TPから離れたとしても、船体6の目標位置側の面(図に太線で示す面。船首は点で示す。)が目標位置TPに向くような姿勢制御が行われている。すなわち、船舶1は、目標位置TPから離れても、領域Iの場合は船尾が目標位置TPに向き、領域IIの場合は船首が目標位置TPに向き、領域IIIの場合は左舷が目標位置TPに向き、領域IVの場合は右舷が目標位置TPに向くように、常に船体6の姿勢が制御されている。
【0029】
そして、船位SPが位置する前記4つの領域I、II、III、IVに応じて、以下のように制御される。領域Iに船位SPがずれている場合、舵7を中立とし、船尾を目標位置TPの方向に向けながら目標位置TPまで後進制御される。領域IIに船位SPがずれている場合、舵7を中立とし、船首5を目標位置TPの方向に向けながら目標位置TPまで前進制御される。領域IIIに船位SPがずれている場合、舵7を右舷70度とし、左舷を目標位置TPの方向に向けながら目標位置TPまで左進制御される。領域IVに船位SPがずれている場合、舵7を左舷70度とし、右舷を目標位置TPの方向に向けながら目標位置TPまで右進制御される。
【0030】
このように、目標位置TPと現船位SPとの相対位置関係により、前後進制御と左右進制御とを切り換えて船位SPを目標位置TPに留めるように制御するので、船体6の姿勢を大きく変更する制御を行うことなく、1軸1舵の船舶1を目標位置TP(定点位置)に安定して留めることができる。
【0031】
なお、前記実施の形態ではプロペラ3に可変ピッチプロペラ3を採用しているため、プロペラピッチ角の変更によって大きな前進推力又は後進推力を発生させることができるので、後進時も迅速な船位制御が行える。このプロペラ3に固定プロペラを採用した場合、正回転と逆回転とにより、前進推力又は後進推力を発生させることができるので、その場合も船位制御は可能であり、プロペラ3の形式は前記実施の形態に限定されるものではない。
【0032】
また、前記実施の形態では制御範囲を2つの円RC,ACとしたが、制御範囲は円形以外であってもよく、前記実施の形態に限定されるものではない。
【0033】
さらに、前述した実施の形態は一例を示しており、本発明の要旨を損なわない範囲での種々の変更は可能であり、本発明は前述した実施の形態に限定されるものではない。
【産業上の利用可能性】
【0034】
本発明に係る1軸1舵船の定点位置保持方法は、GPS等の測位センサとジャイロコンパス等の船首方位角センサとを有して船首方向を常に制御できるが、前後方向と左右方向とを同時に制御できない船舶に適用できる。
【符号の説明】
【0035】
1…船舶
2…定点位置保持装置
3…プロペラ
4…サイドスラスタ(バウスラスタ)
5…船首
6…船体
7…舵(高揚力舵)
8…船首優先制御
9…位置回復制御
RC…目標円
AC…制御円
SP…船位
TP…目標位置
【特許請求の範囲】
【請求項1】
船首方位を常に制御でき、かつ前後方向と左右方向とを同時に制御できない船舶において、
船体の目標位置側を目標位置に向けるように船首方位を制御するとともに、
該目標位置に対する現船位の相対位置が前後方向にずれている場合は前後進制御によって船位を目標位置に留めるように制御し、
該目標位置に対する現船位の相対位置が左右方向にずれている場合は左右進制御によって船位を目標位置に留めるように制御し、
前後進制御と左右進制御とを切り換えて船位を目標位置に留めることを特徴とする1軸1舵船の定点位置保持方法。
【請求項2】
前記目標位置を中心とする目標範囲と、該目標範囲を含む制御範囲とを設定し、
船位が前記目標範囲の内に入ったら船首方位を目標方位に制御する船首優先制御を行い、船位が前記制御範囲の外に出たら前後方向又は左右方向の制御と方位制御とをする位置回復制御を行うようにした請求項1に記載の1軸1舵船の定点位置保持方法。
【請求項3】
前記船舶が、
測位センサと船首方位角センサとを有し、
船首側にサイドスラスタを備え、船尾側に可変ピッチプロペラと高揚力舵とを備えた船舶である請求項1又は請求項2に記載の1軸1舵船の定点位置保持方法。
【請求項4】
船首方位を常に制御でき、かつ前後方向と左右方向とを同時に制御できない船舶に、
船体の目標位置側を目標位置に向けるように船首方位を制御する機能と、
該目標位置に対する現船位の相対位置が前後方向にずれている場合は前後進制御によって船位を目標位置に留めるように制御する機能と、
該目標位置に対する現船位の相対位置が左右方向にずれている場合は左右進制御によって船位を目標位置に留めるように制御する機能と、を備えた制御装置を設け、
該制御装置に、前記前後進制御と左右進制御とを切り換えて船位を目標位置に留める機能を備えさせたことを特徴とする1軸1舵船の定点位置保持装置。
【請求項5】
前記制御装置に、前記目標位置を中心とする目標範囲と、該目標範囲を含む制御範囲とを設定する機能を備えさせ、
該制御装置に、船位が前記目標範囲の内に入ったら船首方位を目標方位に制御する船首優先制御を行い、船位が前記制御範囲の外に出たら前後進方向又は左右進方向の制御と方位制御とをする位置回復制御を行う機能を備えさせた請求項4に記載の1軸1舵船の定点位置保持装置。
【請求項6】
前記船舶が、
測位センサと船首方位角センサとを有し、
船首側にサイドスラスタを備え、船尾側に可変ピッチプロペラと高揚力舵とを備えた船舶である請求項4又は請求項5に記載の1軸1舵船の定点位置保持装置。
【請求項1】
船首方位を常に制御でき、かつ前後方向と左右方向とを同時に制御できない船舶において、
船体の目標位置側を目標位置に向けるように船首方位を制御するとともに、
該目標位置に対する現船位の相対位置が前後方向にずれている場合は前後進制御によって船位を目標位置に留めるように制御し、
該目標位置に対する現船位の相対位置が左右方向にずれている場合は左右進制御によって船位を目標位置に留めるように制御し、
前後進制御と左右進制御とを切り換えて船位を目標位置に留めることを特徴とする1軸1舵船の定点位置保持方法。
【請求項2】
前記目標位置を中心とする目標範囲と、該目標範囲を含む制御範囲とを設定し、
船位が前記目標範囲の内に入ったら船首方位を目標方位に制御する船首優先制御を行い、船位が前記制御範囲の外に出たら前後方向又は左右方向の制御と方位制御とをする位置回復制御を行うようにした請求項1に記載の1軸1舵船の定点位置保持方法。
【請求項3】
前記船舶が、
測位センサと船首方位角センサとを有し、
船首側にサイドスラスタを備え、船尾側に可変ピッチプロペラと高揚力舵とを備えた船舶である請求項1又は請求項2に記載の1軸1舵船の定点位置保持方法。
【請求項4】
船首方位を常に制御でき、かつ前後方向と左右方向とを同時に制御できない船舶に、
船体の目標位置側を目標位置に向けるように船首方位を制御する機能と、
該目標位置に対する現船位の相対位置が前後方向にずれている場合は前後進制御によって船位を目標位置に留めるように制御する機能と、
該目標位置に対する現船位の相対位置が左右方向にずれている場合は左右進制御によって船位を目標位置に留めるように制御する機能と、を備えた制御装置を設け、
該制御装置に、前記前後進制御と左右進制御とを切り換えて船位を目標位置に留める機能を備えさせたことを特徴とする1軸1舵船の定点位置保持装置。
【請求項5】
前記制御装置に、前記目標位置を中心とする目標範囲と、該目標範囲を含む制御範囲とを設定する機能を備えさせ、
該制御装置に、船位が前記目標範囲の内に入ったら船首方位を目標方位に制御する船首優先制御を行い、船位が前記制御範囲の外に出たら前後進方向又は左右進方向の制御と方位制御とをする位置回復制御を行う機能を備えさせた請求項4に記載の1軸1舵船の定点位置保持装置。
【請求項6】
前記船舶が、
測位センサと船首方位角センサとを有し、
船首側にサイドスラスタを備え、船尾側に可変ピッチプロペラと高揚力舵とを備えた船舶である請求項4又は請求項5に記載の1軸1舵船の定点位置保持装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−245979(P2012−245979A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2012−205700(P2012−205700)
【出願日】平成24年9月19日(2012.9.19)
【分割の表示】特願2007−88714(P2007−88714)の分割
【原出願日】平成19年3月29日(2007.3.29)
【出願人】(000000974)川崎重工業株式会社 (1,710)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成24年9月19日(2012.9.19)
【分割の表示】特願2007−88714(P2007−88714)の分割
【原出願日】平成19年3月29日(2007.3.29)
【出願人】(000000974)川崎重工業株式会社 (1,710)
[ Back to top ]