
2つの送−受信所の間の距離を求める方法
1. 第1及び第2の送−受信所間の距離を求める方法、
2.1 送−受信所は、車両技術において通常のように、鍵なし錠装置において、鍵モジュールを確認するための電子鍵モジュール又は評価装置として使用される。鍵モジュールが評価装置の近くにないと、錠装置の動作停止が阻止される。新しい方法は、2つの送−受信所の間の距離を高い分解度で求めるのを可能にする。
2.2.新しい方法では、各送−受信所においてそれぞれ1つの送信信号が発生され、所定のパルス繰返し周波数を持つマイクロ波パルス列として、それぞれ他方の送−受信所へ送信される。各送−受信所において、それぞれの送−受信所により送信される送信信号及び受信される受信信号のパルスの重なりが、一致現象として検出され、それぞれの送−受信所により一致現象の時点に送信されかつ受信されるパルスの数が求められる。求められたパルスの数から、送−受信所の間の距離が計算される。

2.1 送−受信所は、車両技術において通常のように、鍵なし錠装置において、鍵モジュールを確認するための電子鍵モジュール又は評価装置として使用される。鍵モジュールが評価装置の近くにないと、錠装置の動作停止が阻止される。新しい方法は、2つの送−受信所の間の距離を高い分解度で求めるのを可能にする。
2.2.新しい方法では、各送−受信所においてそれぞれ1つの送信信号が発生され、所定のパルス繰返し周波数を持つマイクロ波パルス列として、それぞれ他方の送−受信所へ送信される。各送−受信所において、それぞれの送−受信所により送信される送信信号及び受信される受信信号のパルスの重なりが、一致現象として検出され、それぞれの送−受信所により一致現象の時点に送信されかつ受信されるパルスの数が求められる。求められたパルスの数から、送−受信所の間の距離が計算される。
【発明の詳細な説明】
【発明の詳細な説明】
【0001】
本発明は、請求項1の上位概念に記載の2つの送−受信所の間の距離を求める方法に関する。
【0002】
このような方法は、ドイツ連邦共和国特許出願公開第10019277号明細書から公知である。この方法では、利用者により携帯される電子鍵モジュールと自動車に設けられる評価装置との間に、データを伝送するための無線接続が行われて、鍵モジュールに記憶されている確認番号により鍵モジュールを確認し、自動車を場合によっては利用のため解放する。その際無線接続は、鍵モジュールと評価装置に設けられる送−受信所を介して行われる。中継所を介する無線接続が長くされ、従って自動車が権限のある利用者に気付かれずに自由に利用されるのを防止するため、鍵モジュールと評価装置との間の距離が求められ、鍵モジュールが評価装置の近くにないと、自動車の解放が阻止される。距離の検出は、無線接続を介して伝送される信号の信号伝搬時間評価に基いている。
【0003】
本発明の基礎になっている課題は、僅かな費用で実施可能であり、高い分解度で任意の距離の測定を可能にする、2つの送−受信所の間の距離を求める方法を提示することである。
【0004】
この課題は、請求項1の特徴により解決される。有利な構成及び展開は従属請求項からわかる。
【0005】
本発明によれば、2つの送−受信所の間の距離は、送−受信所において発生されてそれぞれ他方の送−受信所へ送信される送信信号の信号伝搬時間の測定により求められる。送信信号は、所定のパルス繰返し周波数を持つマイクロ波パルス列として発生され、パルス繰返し周波数は、なるべくパルス繰返し周波数に対して小さい差周波数値だけ互いに相違している。更に各送−受信所において、それぞれの送−受信所により送信される送信信号のパルスと受信される受信信号のパルスとの重なりが、一致現象として検出され、各送−受信所に対して、それぞれの送−受信所に割当てられる2つのパルス数が求められ、これらのパルス数が送信パルス数又は受信パルス数として、それぞれの送−受信所により送信される送信信号又は受信される受信信号のパルスの数を、一致現象の時点において現わす。送信信号の信号伝搬時間及び送−受信所の間の距離は、求められたパルス数から計算される。
【0006】
各送−受信所に対して、それぞれの送−受信所により送信される第1のパルスと同じ送−受信所において受信される第1のパルスとの間の時間間隔に相当する時間間隔が、それぞれの送−受信所に対して求められるパルス数から求められ、求められた時間間隔の和により、送−受信所の間の距離が計算されるのがよい。
【0007】
距離尺度数が、送−受信所間の距離の尺度として、式
x=((m(i)−p(j))・g−((n(i)−q(j))・h
に従って計算され、ここでg及びhは、一方又は他方の送−受信所により送信される送信信号の基準時間に標準化された周期を表わし、i及びjは、一方又は他方の送−受信所において求められる一致現象の数に対する計数変数を表わし、m(i)及びn(i)は、一方の送−受信所に割当てられる送信パルス数又は受信パルス数を、i番目の一致現象の時点において表わし、q(j)及びp(j)は、他方の送−受信所に割当てられる送信パルス又は受信パルスを、j番目の一致現象の時点において表わす。
【0008】
方法の好ましい展開では、一方の送−受信所に対して求められるパルス数が、一方の送−受信所において発生される送信信号の変調により、なるべく位相変調により、他方の送−受信所へ伝送され、送−受信所間の距離がこの他方の送−受信所においてパルス数から計算される。
【0009】
パルス数が、それぞれの送−受信所により送信されるか又は受信されるパルスの計数により求められるのがよい。
【0010】
しかし方法の好ましい構成では、送−受信所において発生される送信信号のパルスのみが計数されて、送信パルス計数状態として与えられる。他方の送−受信所において発生される送信信号から、特定の送信パルス計数状態に相当するパルスが選ばれ、この選ばれたパルスが時間的に移動されるか又は抑制され、一方の送−受信所において次の一致現象が予想される時点に現われるか否かが検査されることによって一方の送−受信所に対して、送信パルス数及び受信パルス数が求められる。選ばれたパルスの位相変調のため一致現象が抑制されるか又は時間的に移動されるので、予想される時点に一致現象が現われない時、一方の送−受信所に、それにおいて予想される時点に求められる送信パルス計数状態が送信パルス数として割当てられ、選ばれたパルスの送信パルス計数状態が受信パルス数として割当てられる。そうでない場合、一致現象が選ばれたパルスの位相変調後も予想される時点に現われなくなるまで、選ばれた新しいパルスにより方法段階が繰返される。
【0011】
両方の送−受信所に対する受信パルス数が同じように求められるのがよい。
【0012】
一致現象を求めるため、各送−受信所において、それぞれの送−受信所において発生される送信信号が、この送−受信所により受信される受信信号との混合により、中間周波数信号に変換され、中間周波数信号が続いて濾波、増幅及び包絡線変調によりパルス状評価信号に変換されるのがよい。評価信号のパルスが一致現象時点を特徴づける。
【0013】
本発明による方法の重要な利点は、大きい測定範囲を持っているが、高分解度の測定を可能にすることである。
【0014】
本発明による方法は、自動車用の鍵なし錠装置に使用するのに最もよく適している。このような錠装置では、自動車に評価装置として基地局が設けられ、携帯可能な鍵モジュールと無線区間を介して交信する。その際無線接続は、基地局又は鍵モジュールに設けられている送−受信所を介して行われる。この接続は、利用者により気付かれずに、例えばドアハンドルの操作により行うことができる。無線接続を介してデータが交換され、特に鍵モジュールに記憶されている確認番号が、有利なように符号化された形で基地局へ伝送される。基地局が、鍵モジュールの確認番号に基いて、この鍵モジュール立入り権限が割当てられていることを認め、かつ鍵モジュールが特定の距離以内にあると、基地局が自動車への立入りを可能にする。その際本発明による方法によって距離が求められる。高い分解度のため、鍵モジュールが自動車内にあるか自動車外にあるかを確認することが可能である。それにより、鍵モジュールが自動車の内部にあると、自動車の鎖錠を阻止することが可能である。
【0015】
基地局と鍵モジュールとの間の距離を考慮することにより、錠装置の安全性が高められる。なぜならば、鍵モジュールと基地局との間の距離が特定の値を超過していると、自動車への立入りは、確認番号が正しい場合にも阻止されるからである。従って中継局を介して鍵モジュールと基地局との無線接続が行われることによって、権限のある利用者により気付かれることなく、権限なしに自動車への立入りを行うことは不可能である。
【0016】
実施例及び図面により本発明が詳細に説明される。
【0017】
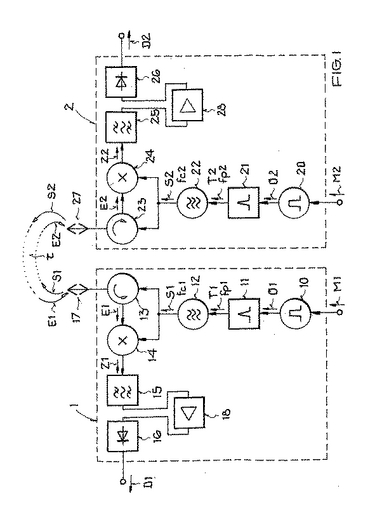
図1によれば、両方の送−受信所1及び2は同じに構成されている。これらは自動車用の鍵なし錠装置の構成部分であり、第1の送−受信所1は自動車に設けられる評価装置の一部であり、第2の送−受信所2は携帯可能な鍵モジュールの一部である。送−受信所1,2の間でデータが交換されて、鍵モジュールに記憶されている確認番号により鍵モジュールを確認し、自動車を場合によっては利用のため解放する。
【0018】
第1の送−受信所1は、周波数変調可能で高度に安定な発振器10、パルス形成器11、マイクロ波発振器12、結合器13、ミクサ14、ZF(中間周波数)フィルタ15、ZF増幅器18、包絡線復調器16及び送−受信アンテナ17を含んでいる。それに応じて第2の送−受信所2も、周波数変調可能で高度に安定な発振器20、パルス形成器21、マイクロ波発振器22、結合器23、ミクサ24、ZFフィルタ25、ZF増幅器28、包絡線復調器28及び送−受信アンテナ27を含んでいる。
【0019】
送−受信所1及び2は喚起過程により始動され、同時に動作する。
【0020】
第1の送−受信所1にある変調可能な発振器10は、制御信号M1に従って位相を変調可能な発振器信号01を発生してパルス形成器1へ供給し、この信号からパルス形成器が幅の狭いパルスを持つトリガ信号T1を発生し、これらのパルスのパルス間隔又はパルス繰返し周波数fp1は、発振器信号01の振動周波数により決定される。トリガ信号T1はマイクロ波発振器12へ供給され、この発振器12がトリガ信号T1のパルスに応答して、マイクロ波発振器12の搬送周波数fc1の若干の周期を持つマイクロ波パルスを発生する。従ってマイクロ波発振器12は、第1の送信信号S1としてマイクロ波パルス列を出力し、この送信信号が結合器13を介して送−受信アンテナ17及びミクサ14へ供給される。
【0021】
これと同じように、第2の送−受信所2にある変調可能な発振器20も同様に、制御信号M2に従って位相を変調可能な発振器信号02を発生し、この信号がパルス形成器21へ供給され、これからパルス形成器が、幅の狭いパルスを持つトリガ信号T2を発生し、これらのパルスのパルス繰返し周波数fp2は、発振器信号02の振動周波数により決定される。トリガ信号T2はマイクロ波発振器22へ供給され、この発振器22がトリガ信号T2のパルスに応答して、マイクロ波発振器22の搬送周波数fc2の若干の周期を持つマイクロ波パルスを発生する。従ってマイクロ波発振器22は、第2の送信信号S2としてマイクロ波パルスを出力し、この送信信号が結合器23を介して送−受信アンテナ27及びミクサ24へ供給される。
【0022】
送−受信アンテナ17及び27を介して、第1又は第2の送信信号S1又はS2が第2又は第1の送−受信所2又は1へ送信され、信号伝搬時間τだけ時間遅れの後、送−受信アンテナ27又は17を介して、第2又は第1の受信信号E2又はE1として受信される。
【0023】
第1の送−受信所1において、第1の受信信号E1が、ミクサ14において第1の送信信号S1と一緒にされて、中間周波数信号Z1になり、この中間周波数信号から、ZFフィルタ15における濾波、ZF増幅器18における増幅及び包絡線復調器16における復調により、第1の評価信号D1が発生される。同じように第2の送−受信所2において、第2の受信信号E2が、ミクサ24において第2の送信信号S2と一緒にされて中間周波数信号Z2になり、この中間周波数信号から、ZFフィルタ25における濾波、ZF増幅器28における増幅及び包絡線復調器26における復調により、第2の評価信号D2が発生される。
【0024】
信号伝搬時間τは、一方の送−受信所から他方の送−受信所へ達する送信信号S1,S2が必要とする時間である。これは、電磁波の固定伝搬速度のため、両方の送−受信所1,2の間の求められる距離の尺度である。
【0025】
送信信号S1,S2の搬送周波数fc1,fc2は同じであり、例えば数GHzの範囲内にある。しかし精度及び周波数安定性に関して高度の要求がこれらの周波数に課されない。
【0026】
トリガ信号T1,T2のパルスの幅は約1nsの範囲内にあり、送信信号S1,S2のパルス繰返し周波数fp1,fp2は例えば数MHzの範囲内にある。重要なことは、パルス繰返し周波数fp1,fp2は、差周波数値fdだけ互いに相違していることである。距離測定の精度は、パルス繰返し周波数fp1,fp2の精度及び周波数安定性に関係している。
【0027】
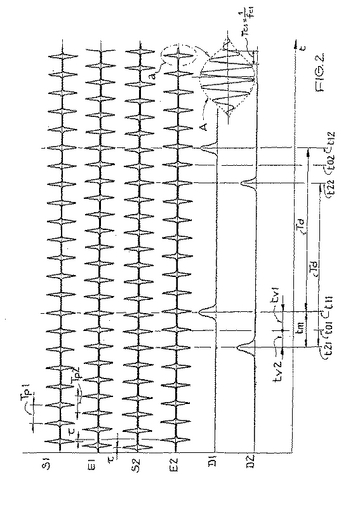
図2は、送−受信所1,2により送信される送信信号S1,S2、送−受信所1,2により受信される受信信号E1,E2、及び信号伝搬時間τ>0に対する評価信号D1,D2の時間線図を示している。部分aの拡大図Aに示すように、信号S1,S2,E1,E2の包絡線のみが示されている。これらの信号は、第1の送信信号S1及び第2の受信信号E2の場合パルス周期Tp1だけ互いに離れており、第2の送信信号S2及び第1の受信信号E1の場合パルス周期Tp2だけ互いに離れているパルスを表わす。パルス周期Tp1,Tp2は、それぞれの信号のパルス繰返し周波数の逆数値に相当している。
【0028】
ミクサ14,15における混合は、第1又は第2の送信信号S1又はS2による第1又は第2の受信信号E1,E2の走査に相当している。差周波数値fdは、それが不足走査であるように小さく選ばれている。
【0029】
結果として生じる評価信号D1,D2も同様にパルス状信号であり、そのパルスはパルス間隔Tdで周期的に現われる。パルス間隔Tdに対してTd=1/fdが成立し、ここでfdは、パルス繰返し周波数fp1,fp2が互いに相違する差周波数値である。第1の評価信号D1のパルスは、第1の送信信号S1及び第1の受信信号E1のパルスが重なる時点に現われる。これらの時点はそれぞれ一致現象を特徴づけ、以下第1の一致時点と称される。同じように、第2の評価信号D2のパルスは、第2の送信信号S2及び第2の受信信号E2のパルスが重なる時点t21,t22に現われる。これらの時点も一致現象を特徴づけ、以下第2の一致時点と称される。図には、両方の送信信号S1,S2のパルスが時間的に重なる時点t01,t02も示されている。これらの時点も同様にパルス間隔Tdだけ互いに離れている。
【0030】
両方の評価パルスD1,D2のパルスは、信号伝搬時間τに比例する時間tm=tv1+tv2だけ互いにずれている。
【0031】
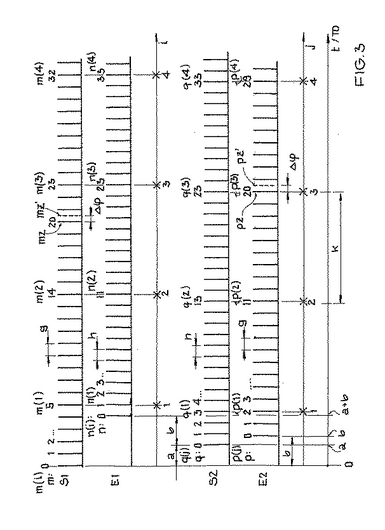
図3は、基準時間T0に標準化される時間軸を持つ図において信号S1,S2,S3,E1,E2のパルスを示している。パルスは簡単化して線分により示されている。基準時間T0は装置の測定分解度に相当している。これは送信信号S1,S2のパルス繰返し周波数fp1,fp2から次のように計算される。
【0032】
図によれば、第1の送−受信所1はパルス列の発生を開始し、このパルス列を第1の送信信号S1として送信する。パルスは、標準化された周期g=Tp1/T0だけ互いに離れている。更に第1の送−受信所1は、無線接続を介して第2の送−受信所2を喚起し、それから第2の送−受信所2が、標準化された非同期時間a後、同様にパルス列の発生を開始し、このパルス列を第2の送信信号として送信する。第2の送信信号S2のパルスは、標準化された周期h=Tp2/T0だけ互いに離れている。
【0033】
標準化された周期g,hは、それらが互いに素の整数であり、その値は例えばg=1001及びh=1000である。
【0034】
第2の受信信号E2は、標準化された信号伝搬時間b=T/T0だけ遅れた第1の送信信号S1に相当し、第1の受信信号E1は標準化された同じ信号伝搬時間bだけ遅れた第2の送信信号S2に相当している。
【0035】
図2は更にパルス計数状態m,n,p及びqも示されている。簡単な表示のためg=9及びh=10が選ばれた。その際パルス計数状態mは、送信パルス計数状態として、特定の時点に第1の送−受信所により送信されるパルスの数を表わし、パルス計数状態nは、受信パルス計数状態として、第1の送−受信所1により受信されるパルスの数を表わしている。これと同じように、パルス計数状態qは、送信パルス計数状態として、第2の送−受信所2により特定の時点に送信されるパルスの数を表わし、パルス計数状態pは、受信パルス計数状態として、第2の送−受信所2により受信されるパルスの数を表わしている。
【0036】
一致現象は、図のi軸及びj軸上にxで示されている。第1の送信信号S1のパルスが第1の受信信号E1のパルスと重なるか、又は第2の送受信信号E2のパルスに重なる時、これらの一致現象が現われ、図1及び2に対する説明によれば、評価信号D1,D2により検出される。変数i及びjは、第1の送−受信所1又は第2の送−受信所2において検出される一致現象を数える。一致現象は、両方の送−受信所1,2において、標準化された同じ一致周期k=g・hで繰返される。
【0037】
第1の送−受信所1において検出される各一致現象iに、2つのパルス数即ち送信パルス数m(i)及び受信パルス数n(j)が割当てられる。その場合送信パルス数m(i)及び受信パルス数n(j)は、i番目の一致現象の時点における第1の送−受信所1の送信パルス計数状態m又は受信パルス計数状態nに相当する。
【0038】
これと同じように、第2の送−受信所2において検出される各一致現象jに、2つのパルス数即ち送信パルス数q(j)及び受信パルス数p(j)が割当てられる。送信パルス数q(j)及び送信パルス数p(j)は、j番目の一致現象の時点における第2の送−受信所2の送信パルス計数状態q又は受信パルス計数状態pに相当している。
【0039】
送−受信所1,2間の距離の検出は、2つの時間間隔a+b,b−aの和に基く標準化された信号伝搬時間bの検出に基いており、一方の時間間隔a+bは、第1の送−受信所1により送信される第1のパルスと第1の送−受信所1により受信される第1のパルスとの時間間隔に相当し、他方の時間間隔b−aは、第2の送−受信所2により送信される第1のパルスと第2の送−受信所2により受信される第1のパルスとの時間間隔に相当している。これらの時間間隔a+b,b−aは、パルス数m(i),n(i),q(j),p(j)と標準化された周期g,hから簡単に求められる。
【0040】
即ち図によれば、第1の送−受信所1の一致現象iに対応するパルス数m(i),n(i)に対して、次の関係が成立し、
m(i)・g=a+b+n(i)・h
第2の送−受信所2の一致現象jに対応するパルス数q(j),p(j)に対して次の関係が成立する。
a+q(j)・h=b+p(j)・g
【0041】
従って計数状態a+b,b−aが生じる。
a+b=m(i)・g−n(i)・h
b−a=+q(j)・h−p(j)・g
【0042】
これらの式の和によって、標準化された信号伝搬時間bに比例する距離尺度和xが、送−受信所1,2間の距離の尺度として得られる。距離尺度数xに対して次の式が成立する。
x=2b=((m(i)−p(j))・g−((n(i)−q(j))・h
【0043】
パルスの計数が図におけるように0で始まるのではなく、1又は他の数で始まる時にも、同じ結果が得られる。
【0044】
送信信号S1,S2の信号伝搬時間τは次式
に従って送−受信所1,2間の距離dに比例し、光速c0に反比例している。b=τ/T0により、距離尺度数xから、求める距離dを次式
に従って計算することができる。
【0045】
第2の送−受信所2において求められるパルス数q(j)及びp(j)が、第1の送−受信所1へ、例えば無線接続を介して又は第2の送信信号S2の変調により伝送される時、第1の送−受信所1には、距離尺度数xの計算に必要なすべてのパルス数m(i),n(i),q(j),p(j)が存在する。従って距離尺度数xは、第1の送−受信所1において直ちに求めることができる。
【0046】
上述した方法では、送信パルス数m(i),q(j)及び受信パルス数n(i),p(j)が、それぞれの信号S1,S2,E1,E2のパルスの計数によって求められる。
【0047】
しかし送信パルス数m(i),q(j)のみを計数によって求め、受信パルス数n(i),p(j)を、送信信号S1,S2の位相変調により間接に、送信信号S1,S2の送信パルス計数状態m,qから求めることも考えられる。
【0048】
例えば第1の送−受信所1において第2の送−受信所2の受信パルス数p(j)を求めるため、第1の送信信号S1からパルスmzが選ばれ(図示した例えではそれは送信パルス計数状態m=20を持つパルスである)、位相変調により特徴づけられる。従って選ばれたパルスmzは、位相値△ψだけ破線で示す位相mz′へ移動されるか又は抑制される。後者は360°の位相移動に相当する。位相移動の結果、第2の受信信号E2において、同じ計数状態に相当するパルスpzが、位相値△ψだけ破線で示す位置pz′へ移動される。
【0049】
図に示すように、パルスpzが、一致現象に相当する位置にあると、位置pz′へのその移動の結果、一致現象が生じない。
【0050】
これに反しパルスpzが、一致現象に相当しない位置にあると、その移動は一致現象にも影響を及ぼさない。その場合一致現象は更に標準化された一致周期kで繰返される。
【0051】
第2の送−受信所2の受信パルス数p(j)を求めるため、選ばれたパルスmzの移動後第2の送−受信所2において一致現象が現われないが否かが検査される。一致現象が現われないことは、一致現象が予想通りに標準化された一致周期kで繰返されることによって、認められる。今や特定の時点に予想される一致現象が現われないことがわかると、この時点に計数により求められる第2の送信信号S2の送信パルス計数状態qが送信パルス数q(j)であると気付き、選ばれたパルスmzの計数状態が受信パルス数p(j)であると気付く。
【0052】
図に示されている事例では、一致現象が現われないことは番号j=3により認められ、対応する送信パルス和q(3)が値q(3)=23に設定され、対応する受信パルス数p(3)が値p(3)=20即ちパルスmzの計数状態に設定される。従って受信パルス数p(3)は、第1の送信信号S1のパルスの計数により間接的に求められる。
【0053】
選ばれたパルスの移動が一致現象に影響を及ぼさないと、選ばれた新しいパルスで方法段階は、移動の結果予想される一致現象が現われなくなるようなパルスに選択が出合うまで、繰返される。
【0054】
第1の送−受信所1に対して送信パルス数m(i)及び対応する受信パルス数n(i)は、第2の送信信号S2から1つのパルスの選択及び位相変調により同じように求めることができる。
【0055】
送信信号S1,S2のうち1つの送信信号の特定のパルスが位相変調により移動されると、当該送信号S1又はS2を受信する送−受信所1,2において、一致現象の間隔が変化する。従って一方の送−受信所1又は2における位相変調は、他方の送−受信所2又は1において検出可能である。従って位相変調は、送−受信所1,2間でデータの伝送も可能にする。
【0056】
上述した方法の重要な利点は、これらの方法が高い一義性範囲を持っているにもかかわらず、高い分解度の測定を可能にすることである。
【0057】
標準化された信号伝搬時間bが標準化された一致周期kより小さく、即ち信号伝搬時間τに対して次式
τ<Tmax=g・h・T0
が成立する時、測定は一義的である。Tmaxは一義性範囲の限界即ち最大測定範囲を表わす。パルス繰返し周波数fp1及びfp2が50MHz又は50.05MHzに選ばれると、基準時間T0及び最大測定範囲Tmaxに対して、値T0=20ps及びTmax=20.02μsが得られ、即ち20.02μsまでの信号伝搬時間τを、20psの分解度で測定することができる。場所範囲では、それは6mmの分解度で約6kmの測定範囲に相当する。
【図面の簡単な説明】
【0058】
【図1】 本発明による方法を実施するための2つの送−受信所の構成図を示す。
【図2】 送−受信所において発生されかつ処理される信号の時間線図を示す。
【図3】 送−受信所において発生されかつ処理される信号の時間線図を示す。
【発明の詳細な説明】
【0001】
本発明は、請求項1の上位概念に記載の2つの送−受信所の間の距離を求める方法に関する。
【0002】
このような方法は、ドイツ連邦共和国特許出願公開第10019277号明細書から公知である。この方法では、利用者により携帯される電子鍵モジュールと自動車に設けられる評価装置との間に、データを伝送するための無線接続が行われて、鍵モジュールに記憶されている確認番号により鍵モジュールを確認し、自動車を場合によっては利用のため解放する。その際無線接続は、鍵モジュールと評価装置に設けられる送−受信所を介して行われる。中継所を介する無線接続が長くされ、従って自動車が権限のある利用者に気付かれずに自由に利用されるのを防止するため、鍵モジュールと評価装置との間の距離が求められ、鍵モジュールが評価装置の近くにないと、自動車の解放が阻止される。距離の検出は、無線接続を介して伝送される信号の信号伝搬時間評価に基いている。
【0003】
本発明の基礎になっている課題は、僅かな費用で実施可能であり、高い分解度で任意の距離の測定を可能にする、2つの送−受信所の間の距離を求める方法を提示することである。
【0004】
この課題は、請求項1の特徴により解決される。有利な構成及び展開は従属請求項からわかる。
【0005】
本発明によれば、2つの送−受信所の間の距離は、送−受信所において発生されてそれぞれ他方の送−受信所へ送信される送信信号の信号伝搬時間の測定により求められる。送信信号は、所定のパルス繰返し周波数を持つマイクロ波パルス列として発生され、パルス繰返し周波数は、なるべくパルス繰返し周波数に対して小さい差周波数値だけ互いに相違している。更に各送−受信所において、それぞれの送−受信所により送信される送信信号のパルスと受信される受信信号のパルスとの重なりが、一致現象として検出され、各送−受信所に対して、それぞれの送−受信所に割当てられる2つのパルス数が求められ、これらのパルス数が送信パルス数又は受信パルス数として、それぞれの送−受信所により送信される送信信号又は受信される受信信号のパルスの数を、一致現象の時点において現わす。送信信号の信号伝搬時間及び送−受信所の間の距離は、求められたパルス数から計算される。
【0006】
各送−受信所に対して、それぞれの送−受信所により送信される第1のパルスと同じ送−受信所において受信される第1のパルスとの間の時間間隔に相当する時間間隔が、それぞれの送−受信所に対して求められるパルス数から求められ、求められた時間間隔の和により、送−受信所の間の距離が計算されるのがよい。
【0007】
距離尺度数が、送−受信所間の距離の尺度として、式
x=((m(i)−p(j))・g−((n(i)−q(j))・h
に従って計算され、ここでg及びhは、一方又は他方の送−受信所により送信される送信信号の基準時間に標準化された周期を表わし、i及びjは、一方又は他方の送−受信所において求められる一致現象の数に対する計数変数を表わし、m(i)及びn(i)は、一方の送−受信所に割当てられる送信パルス数又は受信パルス数を、i番目の一致現象の時点において表わし、q(j)及びp(j)は、他方の送−受信所に割当てられる送信パルス又は受信パルスを、j番目の一致現象の時点において表わす。
【0008】
方法の好ましい展開では、一方の送−受信所に対して求められるパルス数が、一方の送−受信所において発生される送信信号の変調により、なるべく位相変調により、他方の送−受信所へ伝送され、送−受信所間の距離がこの他方の送−受信所においてパルス数から計算される。
【0009】
パルス数が、それぞれの送−受信所により送信されるか又は受信されるパルスの計数により求められるのがよい。
【0010】
しかし方法の好ましい構成では、送−受信所において発生される送信信号のパルスのみが計数されて、送信パルス計数状態として与えられる。他方の送−受信所において発生される送信信号から、特定の送信パルス計数状態に相当するパルスが選ばれ、この選ばれたパルスが時間的に移動されるか又は抑制され、一方の送−受信所において次の一致現象が予想される時点に現われるか否かが検査されることによって一方の送−受信所に対して、送信パルス数及び受信パルス数が求められる。選ばれたパルスの位相変調のため一致現象が抑制されるか又は時間的に移動されるので、予想される時点に一致現象が現われない時、一方の送−受信所に、それにおいて予想される時点に求められる送信パルス計数状態が送信パルス数として割当てられ、選ばれたパルスの送信パルス計数状態が受信パルス数として割当てられる。そうでない場合、一致現象が選ばれたパルスの位相変調後も予想される時点に現われなくなるまで、選ばれた新しいパルスにより方法段階が繰返される。
【0011】
両方の送−受信所に対する受信パルス数が同じように求められるのがよい。
【0012】
一致現象を求めるため、各送−受信所において、それぞれの送−受信所において発生される送信信号が、この送−受信所により受信される受信信号との混合により、中間周波数信号に変換され、中間周波数信号が続いて濾波、増幅及び包絡線変調によりパルス状評価信号に変換されるのがよい。評価信号のパルスが一致現象時点を特徴づける。
【0013】
本発明による方法の重要な利点は、大きい測定範囲を持っているが、高分解度の測定を可能にすることである。
【0014】
本発明による方法は、自動車用の鍵なし錠装置に使用するのに最もよく適している。このような錠装置では、自動車に評価装置として基地局が設けられ、携帯可能な鍵モジュールと無線区間を介して交信する。その際無線接続は、基地局又は鍵モジュールに設けられている送−受信所を介して行われる。この接続は、利用者により気付かれずに、例えばドアハンドルの操作により行うことができる。無線接続を介してデータが交換され、特に鍵モジュールに記憶されている確認番号が、有利なように符号化された形で基地局へ伝送される。基地局が、鍵モジュールの確認番号に基いて、この鍵モジュール立入り権限が割当てられていることを認め、かつ鍵モジュールが特定の距離以内にあると、基地局が自動車への立入りを可能にする。その際本発明による方法によって距離が求められる。高い分解度のため、鍵モジュールが自動車内にあるか自動車外にあるかを確認することが可能である。それにより、鍵モジュールが自動車の内部にあると、自動車の鎖錠を阻止することが可能である。
【0015】
基地局と鍵モジュールとの間の距離を考慮することにより、錠装置の安全性が高められる。なぜならば、鍵モジュールと基地局との間の距離が特定の値を超過していると、自動車への立入りは、確認番号が正しい場合にも阻止されるからである。従って中継局を介して鍵モジュールと基地局との無線接続が行われることによって、権限のある利用者により気付かれることなく、権限なしに自動車への立入りを行うことは不可能である。
【0016】
実施例及び図面により本発明が詳細に説明される。
【0017】
図1によれば、両方の送−受信所1及び2は同じに構成されている。これらは自動車用の鍵なし錠装置の構成部分であり、第1の送−受信所1は自動車に設けられる評価装置の一部であり、第2の送−受信所2は携帯可能な鍵モジュールの一部である。送−受信所1,2の間でデータが交換されて、鍵モジュールに記憶されている確認番号により鍵モジュールを確認し、自動車を場合によっては利用のため解放する。
【0018】
第1の送−受信所1は、周波数変調可能で高度に安定な発振器10、パルス形成器11、マイクロ波発振器12、結合器13、ミクサ14、ZF(中間周波数)フィルタ15、ZF増幅器18、包絡線復調器16及び送−受信アンテナ17を含んでいる。それに応じて第2の送−受信所2も、周波数変調可能で高度に安定な発振器20、パルス形成器21、マイクロ波発振器22、結合器23、ミクサ24、ZFフィルタ25、ZF増幅器28、包絡線復調器28及び送−受信アンテナ27を含んでいる。
【0019】
送−受信所1及び2は喚起過程により始動され、同時に動作する。
【0020】
第1の送−受信所1にある変調可能な発振器10は、制御信号M1に従って位相を変調可能な発振器信号01を発生してパルス形成器1へ供給し、この信号からパルス形成器が幅の狭いパルスを持つトリガ信号T1を発生し、これらのパルスのパルス間隔又はパルス繰返し周波数fp1は、発振器信号01の振動周波数により決定される。トリガ信号T1はマイクロ波発振器12へ供給され、この発振器12がトリガ信号T1のパルスに応答して、マイクロ波発振器12の搬送周波数fc1の若干の周期を持つマイクロ波パルスを発生する。従ってマイクロ波発振器12は、第1の送信信号S1としてマイクロ波パルス列を出力し、この送信信号が結合器13を介して送−受信アンテナ17及びミクサ14へ供給される。
【0021】
これと同じように、第2の送−受信所2にある変調可能な発振器20も同様に、制御信号M2に従って位相を変調可能な発振器信号02を発生し、この信号がパルス形成器21へ供給され、これからパルス形成器が、幅の狭いパルスを持つトリガ信号T2を発生し、これらのパルスのパルス繰返し周波数fp2は、発振器信号02の振動周波数により決定される。トリガ信号T2はマイクロ波発振器22へ供給され、この発振器22がトリガ信号T2のパルスに応答して、マイクロ波発振器22の搬送周波数fc2の若干の周期を持つマイクロ波パルスを発生する。従ってマイクロ波発振器22は、第2の送信信号S2としてマイクロ波パルスを出力し、この送信信号が結合器23を介して送−受信アンテナ27及びミクサ24へ供給される。
【0022】
送−受信アンテナ17及び27を介して、第1又は第2の送信信号S1又はS2が第2又は第1の送−受信所2又は1へ送信され、信号伝搬時間τだけ時間遅れの後、送−受信アンテナ27又は17を介して、第2又は第1の受信信号E2又はE1として受信される。
【0023】
第1の送−受信所1において、第1の受信信号E1が、ミクサ14において第1の送信信号S1と一緒にされて、中間周波数信号Z1になり、この中間周波数信号から、ZFフィルタ15における濾波、ZF増幅器18における増幅及び包絡線復調器16における復調により、第1の評価信号D1が発生される。同じように第2の送−受信所2において、第2の受信信号E2が、ミクサ24において第2の送信信号S2と一緒にされて中間周波数信号Z2になり、この中間周波数信号から、ZFフィルタ25における濾波、ZF増幅器28における増幅及び包絡線復調器26における復調により、第2の評価信号D2が発生される。
【0024】
信号伝搬時間τは、一方の送−受信所から他方の送−受信所へ達する送信信号S1,S2が必要とする時間である。これは、電磁波の固定伝搬速度のため、両方の送−受信所1,2の間の求められる距離の尺度である。
【0025】
送信信号S1,S2の搬送周波数fc1,fc2は同じであり、例えば数GHzの範囲内にある。しかし精度及び周波数安定性に関して高度の要求がこれらの周波数に課されない。
【0026】
トリガ信号T1,T2のパルスの幅は約1nsの範囲内にあり、送信信号S1,S2のパルス繰返し周波数fp1,fp2は例えば数MHzの範囲内にある。重要なことは、パルス繰返し周波数fp1,fp2は、差周波数値fdだけ互いに相違していることである。距離測定の精度は、パルス繰返し周波数fp1,fp2の精度及び周波数安定性に関係している。
【0027】
図2は、送−受信所1,2により送信される送信信号S1,S2、送−受信所1,2により受信される受信信号E1,E2、及び信号伝搬時間τ>0に対する評価信号D1,D2の時間線図を示している。部分aの拡大図Aに示すように、信号S1,S2,E1,E2の包絡線のみが示されている。これらの信号は、第1の送信信号S1及び第2の受信信号E2の場合パルス周期Tp1だけ互いに離れており、第2の送信信号S2及び第1の受信信号E1の場合パルス周期Tp2だけ互いに離れているパルスを表わす。パルス周期Tp1,Tp2は、それぞれの信号のパルス繰返し周波数の逆数値に相当している。
【0028】
ミクサ14,15における混合は、第1又は第2の送信信号S1又はS2による第1又は第2の受信信号E1,E2の走査に相当している。差周波数値fdは、それが不足走査であるように小さく選ばれている。
【0029】
結果として生じる評価信号D1,D2も同様にパルス状信号であり、そのパルスはパルス間隔Tdで周期的に現われる。パルス間隔Tdに対してTd=1/fdが成立し、ここでfdは、パルス繰返し周波数fp1,fp2が互いに相違する差周波数値である。第1の評価信号D1のパルスは、第1の送信信号S1及び第1の受信信号E1のパルスが重なる時点に現われる。これらの時点はそれぞれ一致現象を特徴づけ、以下第1の一致時点と称される。同じように、第2の評価信号D2のパルスは、第2の送信信号S2及び第2の受信信号E2のパルスが重なる時点t21,t22に現われる。これらの時点も一致現象を特徴づけ、以下第2の一致時点と称される。図には、両方の送信信号S1,S2のパルスが時間的に重なる時点t01,t02も示されている。これらの時点も同様にパルス間隔Tdだけ互いに離れている。
【0030】
両方の評価パルスD1,D2のパルスは、信号伝搬時間τに比例する時間tm=tv1+tv2だけ互いにずれている。
【0031】
図3は、基準時間T0に標準化される時間軸を持つ図において信号S1,S2,S3,E1,E2のパルスを示している。パルスは簡単化して線分により示されている。基準時間T0は装置の測定分解度に相当している。これは送信信号S1,S2のパルス繰返し周波数fp1,fp2から次のように計算される。
【0032】
図によれば、第1の送−受信所1はパルス列の発生を開始し、このパルス列を第1の送信信号S1として送信する。パルスは、標準化された周期g=Tp1/T0だけ互いに離れている。更に第1の送−受信所1は、無線接続を介して第2の送−受信所2を喚起し、それから第2の送−受信所2が、標準化された非同期時間a後、同様にパルス列の発生を開始し、このパルス列を第2の送信信号として送信する。第2の送信信号S2のパルスは、標準化された周期h=Tp2/T0だけ互いに離れている。
【0033】
標準化された周期g,hは、それらが互いに素の整数であり、その値は例えばg=1001及びh=1000である。
【0034】
第2の受信信号E2は、標準化された信号伝搬時間b=T/T0だけ遅れた第1の送信信号S1に相当し、第1の受信信号E1は標準化された同じ信号伝搬時間bだけ遅れた第2の送信信号S2に相当している。
【0035】
図2は更にパルス計数状態m,n,p及びqも示されている。簡単な表示のためg=9及びh=10が選ばれた。その際パルス計数状態mは、送信パルス計数状態として、特定の時点に第1の送−受信所により送信されるパルスの数を表わし、パルス計数状態nは、受信パルス計数状態として、第1の送−受信所1により受信されるパルスの数を表わしている。これと同じように、パルス計数状態qは、送信パルス計数状態として、第2の送−受信所2により特定の時点に送信されるパルスの数を表わし、パルス計数状態pは、受信パルス計数状態として、第2の送−受信所2により受信されるパルスの数を表わしている。
【0036】
一致現象は、図のi軸及びj軸上にxで示されている。第1の送信信号S1のパルスが第1の受信信号E1のパルスと重なるか、又は第2の送受信信号E2のパルスに重なる時、これらの一致現象が現われ、図1及び2に対する説明によれば、評価信号D1,D2により検出される。変数i及びjは、第1の送−受信所1又は第2の送−受信所2において検出される一致現象を数える。一致現象は、両方の送−受信所1,2において、標準化された同じ一致周期k=g・hで繰返される。
【0037】
第1の送−受信所1において検出される各一致現象iに、2つのパルス数即ち送信パルス数m(i)及び受信パルス数n(j)が割当てられる。その場合送信パルス数m(i)及び受信パルス数n(j)は、i番目の一致現象の時点における第1の送−受信所1の送信パルス計数状態m又は受信パルス計数状態nに相当する。
【0038】
これと同じように、第2の送−受信所2において検出される各一致現象jに、2つのパルス数即ち送信パルス数q(j)及び受信パルス数p(j)が割当てられる。送信パルス数q(j)及び送信パルス数p(j)は、j番目の一致現象の時点における第2の送−受信所2の送信パルス計数状態q又は受信パルス計数状態pに相当している。
【0039】
送−受信所1,2間の距離の検出は、2つの時間間隔a+b,b−aの和に基く標準化された信号伝搬時間bの検出に基いており、一方の時間間隔a+bは、第1の送−受信所1により送信される第1のパルスと第1の送−受信所1により受信される第1のパルスとの時間間隔に相当し、他方の時間間隔b−aは、第2の送−受信所2により送信される第1のパルスと第2の送−受信所2により受信される第1のパルスとの時間間隔に相当している。これらの時間間隔a+b,b−aは、パルス数m(i),n(i),q(j),p(j)と標準化された周期g,hから簡単に求められる。
【0040】
即ち図によれば、第1の送−受信所1の一致現象iに対応するパルス数m(i),n(i)に対して、次の関係が成立し、
m(i)・g=a+b+n(i)・h
第2の送−受信所2の一致現象jに対応するパルス数q(j),p(j)に対して次の関係が成立する。
a+q(j)・h=b+p(j)・g
【0041】
従って計数状態a+b,b−aが生じる。
a+b=m(i)・g−n(i)・h
b−a=+q(j)・h−p(j)・g
【0042】
これらの式の和によって、標準化された信号伝搬時間bに比例する距離尺度和xが、送−受信所1,2間の距離の尺度として得られる。距離尺度数xに対して次の式が成立する。
x=2b=((m(i)−p(j))・g−((n(i)−q(j))・h
【0043】
パルスの計数が図におけるように0で始まるのではなく、1又は他の数で始まる時にも、同じ結果が得られる。
【0044】
送信信号S1,S2の信号伝搬時間τは次式
に従って送−受信所1,2間の距離dに比例し、光速c0に反比例している。b=τ/T0により、距離尺度数xから、求める距離dを次式
に従って計算することができる。
【0045】
第2の送−受信所2において求められるパルス数q(j)及びp(j)が、第1の送−受信所1へ、例えば無線接続を介して又は第2の送信信号S2の変調により伝送される時、第1の送−受信所1には、距離尺度数xの計算に必要なすべてのパルス数m(i),n(i),q(j),p(j)が存在する。従って距離尺度数xは、第1の送−受信所1において直ちに求めることができる。
【0046】
上述した方法では、送信パルス数m(i),q(j)及び受信パルス数n(i),p(j)が、それぞれの信号S1,S2,E1,E2のパルスの計数によって求められる。
【0047】
しかし送信パルス数m(i),q(j)のみを計数によって求め、受信パルス数n(i),p(j)を、送信信号S1,S2の位相変調により間接に、送信信号S1,S2の送信パルス計数状態m,qから求めることも考えられる。
【0048】
例えば第1の送−受信所1において第2の送−受信所2の受信パルス数p(j)を求めるため、第1の送信信号S1からパルスmzが選ばれ(図示した例えではそれは送信パルス計数状態m=20を持つパルスである)、位相変調により特徴づけられる。従って選ばれたパルスmzは、位相値△ψだけ破線で示す位相mz′へ移動されるか又は抑制される。後者は360°の位相移動に相当する。位相移動の結果、第2の受信信号E2において、同じ計数状態に相当するパルスpzが、位相値△ψだけ破線で示す位置pz′へ移動される。
【0049】
図に示すように、パルスpzが、一致現象に相当する位置にあると、位置pz′へのその移動の結果、一致現象が生じない。
【0050】
これに反しパルスpzが、一致現象に相当しない位置にあると、その移動は一致現象にも影響を及ぼさない。その場合一致現象は更に標準化された一致周期kで繰返される。
【0051】
第2の送−受信所2の受信パルス数p(j)を求めるため、選ばれたパルスmzの移動後第2の送−受信所2において一致現象が現われないが否かが検査される。一致現象が現われないことは、一致現象が予想通りに標準化された一致周期kで繰返されることによって、認められる。今や特定の時点に予想される一致現象が現われないことがわかると、この時点に計数により求められる第2の送信信号S2の送信パルス計数状態qが送信パルス数q(j)であると気付き、選ばれたパルスmzの計数状態が受信パルス数p(j)であると気付く。
【0052】
図に示されている事例では、一致現象が現われないことは番号j=3により認められ、対応する送信パルス和q(3)が値q(3)=23に設定され、対応する受信パルス数p(3)が値p(3)=20即ちパルスmzの計数状態に設定される。従って受信パルス数p(3)は、第1の送信信号S1のパルスの計数により間接的に求められる。
【0053】
選ばれたパルスの移動が一致現象に影響を及ぼさないと、選ばれた新しいパルスで方法段階は、移動の結果予想される一致現象が現われなくなるようなパルスに選択が出合うまで、繰返される。
【0054】
第1の送−受信所1に対して送信パルス数m(i)及び対応する受信パルス数n(i)は、第2の送信信号S2から1つのパルスの選択及び位相変調により同じように求めることができる。
【0055】
送信信号S1,S2のうち1つの送信信号の特定のパルスが位相変調により移動されると、当該送信号S1又はS2を受信する送−受信所1,2において、一致現象の間隔が変化する。従って一方の送−受信所1又は2における位相変調は、他方の送−受信所2又は1において検出可能である。従って位相変調は、送−受信所1,2間でデータの伝送も可能にする。
【0056】
上述した方法の重要な利点は、これらの方法が高い一義性範囲を持っているにもかかわらず、高い分解度の測定を可能にすることである。
【0057】
標準化された信号伝搬時間bが標準化された一致周期kより小さく、即ち信号伝搬時間τに対して次式
τ<Tmax=g・h・T0
が成立する時、測定は一義的である。Tmaxは一義性範囲の限界即ち最大測定範囲を表わす。パルス繰返し周波数fp1及びfp2が50MHz又は50.05MHzに選ばれると、基準時間T0及び最大測定範囲Tmaxに対して、値T0=20ps及びTmax=20.02μsが得られ、即ち20.02μsまでの信号伝搬時間τを、20psの分解度で測定することができる。場所範囲では、それは6mmの分解度で約6kmの測定範囲に相当する。
【図面の簡単な説明】
【0058】
【図1】 本発明による方法を実施するための2つの送−受信所の構成図を示す。
【図2】 送−受信所において発生されかつ処理される信号の時間線図を示す。
【図3】 送−受信所において発生されかつ処理される信号の時間線図を示す。
【特許請求の範囲】
【請求項1】
各送−受信所(1,2)において送信信号(S1,S2)が発生され、所定のパルス繰返し周波数(fp1,fp2)を持つマイクロ波パルス列としてそれぞれ他方の送−受信所(2,1)へ送信され、この送−受信所により受信信号(E2,E1)として受信され、送信信号(S1,S2)のパルス繰返し周波数(fp1,fp2)が、所定の差周波数値(fd)だけ互いに相違し、
各送−受信所(1,2)において、それぞれの送−受信所(1,2)により送信される送信信号(S1,S2)のパルスと受信信号(E2,E1)のパルスとの重なりが、一致現象として検出され、
各送−受信所(1,2)に対して、それぞれの送−受信所(1,2)に割当てられる2つのパルス数(m(i),n(i),p(j),q(j))が求められ、これらのパルス数が、送信パルス数(m(i),q(j))又は受信パルス数(n(i),p(j))として、それぞれの送−受信所(1,2)により送信されるか又は受信されるパルスの数を、一致現象の時点に表わし、
送−受信所(1,2)間の距離がパルス数(m(i),n(i),p(j),q(j))から計算される
ことを特徴とする、2つの送−受信所(1,2)の間の距離を求める方法。
【請求項2】
各送−受信所(1,2)に対して、それぞれの送−受信所(1,2)により送信される第1のパルスと同じ送−受信所(1,2)において受信される第1のパルスとの間の時間間隔(a+b,b−a)が、それぞれの送−受信所(1,2)に対して求められるパルス数(m(i),n(i),p(j),q(j))から求められ、求められた時間間隔(a+b,b−a)の和により、送−受信所(1,2)の間の距離が計算されることを特徴とする、請求項1に記載の方法。
【請求項3】
距離尺度数(x)が、送−受信所(1,2)間の距離の尺度として、式
x=((m(i)−p(j))・g−((n(i)−q(j))・h
に従って計算され、ここでg及びhは、一方又は他方の送−受信所(1,2)により送信される送信信号(S1,S2)の基準時間(T0)に標準化された周期(Tp1,Tp2)を表わし、
i及びjは、一方又は他方の送−受信所(1,2)において特定の時点に検出される一致現象の数に対する計数変数を表わし、
m(i)及びn(i)は、一方の送−受信所(1)に割当てられる送信パルス数又は受信パルス数を、i番目の一致現象の時点において表わし、
q(j)及びp(j)は、他方の送−受信所(2)に割当てられる送信パルス又は受信パルスを、j番目の一致現象の時点において表わす
ことを特徴とする、請求項1又は2に記載の方法。
【請求項4】
一方の送−受信所(2)に対して求められるパルス数(p(j),q(j))が、一方の送−受信所(2)において発生される送信信号(S2)の変調により、他方の送−受信所(1)へ伝送され、送−受信所(1,2)間の距離がこの他方の送−受信所(1)においてパルス数から計算されることを特徴とする、先行する請求項の1つに記載の方法。
【請求項5】
送信信号(S2)が位相変調により変調されることを特徴とする、請求項4に記載の方法。
【請求項6】
パルス数(m(i),n(i),q(j),p(j))が、それぞれの送−受信所(1,2)により送信されるか又は受信されるパルスの計数により求められることを特徴とする、先行する請求項の1つに記載の方法。
【請求項7】
各送−受信所(1,2)において、送信されるパルスが、送信パルス計数状態(m,n)を求めるために計数されることを特徴とする、請求項1〜3の1つに記載の方法。
【請求項8】
他方の送−受信所(1)において発生される送信信号(S1)から、特定の送信パルス計数状態(m)に相当するパルス(mz)が選ばれ、時間的に移動されるか又は抑制され、
一方の送−受信所(2)において次の一致現象が予想される時点に現われるか否かが検査され、かつ
予想される時点に一致現象が現われない時、一方の送−受信所に、それにおいて予想される時点に求められる送信パルス計数状態(q)が送信パルス数(q(3))として割当てられ、選ばれたパルス(mz)の送信パルス計数状態(m)が受信パルス数(p(3))として割当てられる
ことによって、送信パルス数(q(j))及び受信パルス数(p(j))が、一方の送−受信所(2)のために求められることを特徴とする、請求項7に記載の方法。
【請求項9】
予想される時点に一致現象が現われる場合方法段階が、選ばれた新しいパルスにより、予想される時点に一致現象が現われなくなるまで、繰返されることを特徴とする、請求項8に記載の方法。
【請求項10】
両方の送−受信所(1,2)に対する受信パルス数(n(i),p(j))が同じように求められることを特徴とする、請求項8又は9に記載の方法。
【請求項11】
差周波数値(fd)が、送信信号(S1,S2)のパルス繰返し周波数(fp1,fp2)より著しく小さいことを特徴とする、先行する請求項の1つに記載の方法。
【請求項12】
送−受信所(1,2)の間で、送信信号(S1,S2)の位相変調によりデータが伝送されることを特徴とする、先行する請求項の1つに記載の方法。
【請求項13】
送−受信所(1,2)において、それぞれの送−受信所(1,2)において発生される送信信号(S1,S2)が、この送−受信所により受信される受信信号(E1,E2)との混合により、中間周波数信号(Z1,Z2)に変換され、中間周波数信号(Z1,Z2)が濾波及び包絡線変調によりパルス状評価信号(D1,D2)に変換され、評価信号(D1,D2)のパルスの時間的位置が、一致現象の現われる時点(t11,t12,t21,t22)として求められることを特徴とする、先行する請求項の1つに記載の方法。
【請求項14】
自動車に設けられる送−受信所と鍵モジュールに設けられる別の送−受信所との間の距離を求めるため、自動車のための鍵なし錠装置における、先行する請求項の1つに記載の方法の使用。
【請求項1】
各送−受信所(1,2)において送信信号(S1,S2)が発生され、所定のパルス繰返し周波数(fp1,fp2)を持つマイクロ波パルス列としてそれぞれ他方の送−受信所(2,1)へ送信され、この送−受信所により受信信号(E2,E1)として受信され、送信信号(S1,S2)のパルス繰返し周波数(fp1,fp2)が、所定の差周波数値(fd)だけ互いに相違し、
各送−受信所(1,2)において、それぞれの送−受信所(1,2)により送信される送信信号(S1,S2)のパルスと受信信号(E2,E1)のパルスとの重なりが、一致現象として検出され、
各送−受信所(1,2)に対して、それぞれの送−受信所(1,2)に割当てられる2つのパルス数(m(i),n(i),p(j),q(j))が求められ、これらのパルス数が、送信パルス数(m(i),q(j))又は受信パルス数(n(i),p(j))として、それぞれの送−受信所(1,2)により送信されるか又は受信されるパルスの数を、一致現象の時点に表わし、
送−受信所(1,2)間の距離がパルス数(m(i),n(i),p(j),q(j))から計算される
ことを特徴とする、2つの送−受信所(1,2)の間の距離を求める方法。
【請求項2】
各送−受信所(1,2)に対して、それぞれの送−受信所(1,2)により送信される第1のパルスと同じ送−受信所(1,2)において受信される第1のパルスとの間の時間間隔(a+b,b−a)が、それぞれの送−受信所(1,2)に対して求められるパルス数(m(i),n(i),p(j),q(j))から求められ、求められた時間間隔(a+b,b−a)の和により、送−受信所(1,2)の間の距離が計算されることを特徴とする、請求項1に記載の方法。
【請求項3】
距離尺度数(x)が、送−受信所(1,2)間の距離の尺度として、式
x=((m(i)−p(j))・g−((n(i)−q(j))・h
に従って計算され、ここでg及びhは、一方又は他方の送−受信所(1,2)により送信される送信信号(S1,S2)の基準時間(T0)に標準化された周期(Tp1,Tp2)を表わし、
i及びjは、一方又は他方の送−受信所(1,2)において特定の時点に検出される一致現象の数に対する計数変数を表わし、
m(i)及びn(i)は、一方の送−受信所(1)に割当てられる送信パルス数又は受信パルス数を、i番目の一致現象の時点において表わし、
q(j)及びp(j)は、他方の送−受信所(2)に割当てられる送信パルス又は受信パルスを、j番目の一致現象の時点において表わす
ことを特徴とする、請求項1又は2に記載の方法。
【請求項4】
一方の送−受信所(2)に対して求められるパルス数(p(j),q(j))が、一方の送−受信所(2)において発生される送信信号(S2)の変調により、他方の送−受信所(1)へ伝送され、送−受信所(1,2)間の距離がこの他方の送−受信所(1)においてパルス数から計算されることを特徴とする、先行する請求項の1つに記載の方法。
【請求項5】
送信信号(S2)が位相変調により変調されることを特徴とする、請求項4に記載の方法。
【請求項6】
パルス数(m(i),n(i),q(j),p(j))が、それぞれの送−受信所(1,2)により送信されるか又は受信されるパルスの計数により求められることを特徴とする、先行する請求項の1つに記載の方法。
【請求項7】
各送−受信所(1,2)において、送信されるパルスが、送信パルス計数状態(m,n)を求めるために計数されることを特徴とする、請求項1〜3の1つに記載の方法。
【請求項8】
他方の送−受信所(1)において発生される送信信号(S1)から、特定の送信パルス計数状態(m)に相当するパルス(mz)が選ばれ、時間的に移動されるか又は抑制され、
一方の送−受信所(2)において次の一致現象が予想される時点に現われるか否かが検査され、かつ
予想される時点に一致現象が現われない時、一方の送−受信所に、それにおいて予想される時点に求められる送信パルス計数状態(q)が送信パルス数(q(3))として割当てられ、選ばれたパルス(mz)の送信パルス計数状態(m)が受信パルス数(p(3))として割当てられる
ことによって、送信パルス数(q(j))及び受信パルス数(p(j))が、一方の送−受信所(2)のために求められることを特徴とする、請求項7に記載の方法。
【請求項9】
予想される時点に一致現象が現われる場合方法段階が、選ばれた新しいパルスにより、予想される時点に一致現象が現われなくなるまで、繰返されることを特徴とする、請求項8に記載の方法。
【請求項10】
両方の送−受信所(1,2)に対する受信パルス数(n(i),p(j))が同じように求められることを特徴とする、請求項8又は9に記載の方法。
【請求項11】
差周波数値(fd)が、送信信号(S1,S2)のパルス繰返し周波数(fp1,fp2)より著しく小さいことを特徴とする、先行する請求項の1つに記載の方法。
【請求項12】
送−受信所(1,2)の間で、送信信号(S1,S2)の位相変調によりデータが伝送されることを特徴とする、先行する請求項の1つに記載の方法。
【請求項13】
送−受信所(1,2)において、それぞれの送−受信所(1,2)において発生される送信信号(S1,S2)が、この送−受信所により受信される受信信号(E1,E2)との混合により、中間周波数信号(Z1,Z2)に変換され、中間周波数信号(Z1,Z2)が濾波及び包絡線変調によりパルス状評価信号(D1,D2)に変換され、評価信号(D1,D2)のパルスの時間的位置が、一致現象の現われる時点(t11,t12,t21,t22)として求められることを特徴とする、先行する請求項の1つに記載の方法。
【請求項14】
自動車に設けられる送−受信所と鍵モジュールに設けられる別の送−受信所との間の距離を求めるため、自動車のための鍵なし錠装置における、先行する請求項の1つに記載の方法の使用。
【図1】

【図2】
【図3】
【図2】
【図3】
【公表番号】特表2006−503273(P2006−503273A)
【公表日】平成18年1月26日(2006.1.26)
【国際特許分類】
【出願番号】特願2004−543937(P2004−543937)
【出願日】平成15年9月8日(2003.9.8)
【国際出願番号】PCT/DE2003/002968
【国際公開番号】WO2004/036241
【国際公開日】平成16年4月29日(2004.4.29)
【出願人】(503355292)コンティ テミック マイクロエレクトロニック ゲゼルシャフト ミット ベシュレンクテル ハフツング (79)
【Fターム(参考)】
【公表日】平成18年1月26日(2006.1.26)
【国際特許分類】
【出願日】平成15年9月8日(2003.9.8)
【国際出願番号】PCT/DE2003/002968
【国際公開番号】WO2004/036241
【国際公開日】平成16年4月29日(2004.4.29)
【出願人】(503355292)コンティ テミック マイクロエレクトロニック ゲゼルシャフト ミット ベシュレンクテル ハフツング (79)
【Fターム(参考)】
[ Back to top ]