
2周波CWレーダ
【課題】2周波CWレーダと回転支持機構との結合態様を工夫して、静止物体も測距可能な回転走査型2周波CWレーダを簡素な構成で実現する。
【解決手段】同一方向を向いた送信アンテナ34及び受信アンテナ35と、周波数f1,f2の異なる連続波をアンテナ34から空中へ出射する送信部31〜33と、アンテナ35で受信した反射波からドップラー低周波信号fd1,fd2 を検出する受信部36〜37と、その低周波信号から位相差Δφを検出して反射物までの距離Rを算出する信号処理部61と、アンテナ34,35を搭載して軸回転する回転支持機構63とを備え、その搭載がアンテナ34の出射中心線67と回転支持機構63の回転軸42とをねじれの位置の直線にする状態でなされる。
【解決手段】同一方向を向いた送信アンテナ34及び受信アンテナ35と、周波数f1,f2の異なる連続波をアンテナ34から空中へ出射する送信部31〜33と、アンテナ35で受信した反射波からドップラー低周波信号fd1,fd2 を検出する受信部36〜37と、その低周波信号から位相差Δφを検出して反射物までの距離Rを算出する信号処理部61と、アンテナ34,35を搭載して軸回転する回転支持機構63とを備え、その搭載がアンテナ34の出射中心線67と回転支持機構63の回転軸42とをねじれの位置の直線にする状態でなされる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、反射物までの距離を測定する2周波CW(Continuous Wave、連続波)レーダに関し、詳しくは、回転走査を伴って検知範囲の広い2周波CWレーダに関する。
このような2周波CWレーダは、鉄道の踏切における障害物の検知や、駅のホーム下への転落者の検知などに、有用である。
【背景技術】
【0002】
或る程度の広がりを持った検知範囲の中に在る物体までの距離を計測するには、回転走査を伴ったレーダ方式が適しており、その具体化には、一般に、静止物体の検出も可能なFMCW(Frequency Modulation Continuous Wave)方式が用いられている。しかし、この方式では、周波数帯域の制限から、高い検知精度が得られない。
一方、物体(反射物)までの距離に対応して変化する反射波の位相差に基づいて距離計測を行う2周波CW方式は(例えば特許文献1〜3参照)、測距精度は高いものの、センサ(アンテナ)と反射物との相対速度がゼロになっていると、その物体を検知できなくなる(特許文献3の課題欄を参照)、という弱点がある。
【0003】
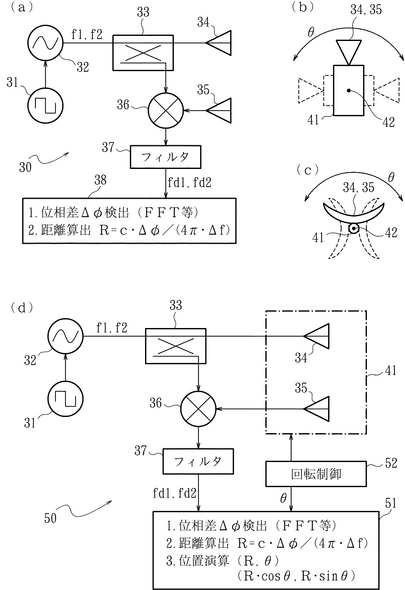
図3(a)は、そのような従来の2周波CWレーダ30の基本構成を示すブロック図である(特許文献3図2参照)。この2周波CWレーダ30は、同一方向を向いた別体の送信アンテナ34及び受信アンテナ35と、変調器31にて変調される高周波発信器32から周波数f1,f2の異なる連続波を発生させそれを信号分配器33経由で送信アンテナ34から空中へ送信波として出射する送信部31〜33と、受信アンテナ35で受信した反射波から混合器36とフィルタ37にてドップラシフト周波数fd1,fd2 のドップラー低周波信号を検出する受信部36〜37と、そのドップラー低周波信号のうち検出元の反射波の発生元の送信波の周波数の異なるものから位相差Δφを検出して反射物までの距離Rを算出する信号処理部38とを具えている。
【0004】
このような2周波CWレーダ30は(特許文献3の従来技術欄を参照、ここではその要点を再掲する)、高周波発信器32により生成される高周波信号を変調器31で変調することで、周波数がΔfだけ離れた2つの連続波(周波数f1,f2)を生成する。この連続波は、信号分配器33により分配され、一方は送信アンテナ34により放射(出射)される。この送信波は、出射範囲に物体が在ると、それにより反射され、受信アンテナ35で受信される。この反射波を高周波信号で検波すると、すなわち、反射波の受信信号と、信号分配器33により分配された対応する連続波(周波数f1,f2)とを、混合器36でミキシングし、更にフィルタ37で高周波成分をカットすると、連続波(周波数f1,f2)に対応したドップラー低周波信号(周波数fd1,fd2 )が得られる。
【0005】
周波数fd1,fd2 はほとんど違わないので、等しいものとして、FFT(Fast Fourier Transform)等にてドップラー低周波信号(周波数fd1,fd2 )の位相差Δφを求め、更に、上述の周波数差Δfや物理定数の光速cを用いて所定式[c・Δφ/(4π・Δf)]を演算することにより、距離Rが算出される。
この場合(特許文献3の課題欄を参照)、反射物とアンテナ34,35との間に相対速度が存在することにより生じるドップラシフト周波数fd1,fd2 のドップラー低周波信号を検出して算出距離Rを得ていることから、反射物とアンテナとの間に相対速度が存在しなければ、即ち物体が静止しているときには、反射波を高周波信号で検波した結果が直流成分のみとなり、ドップラー低周波信号が得られないため、位相差Δφが存在せず、反射物までの距離Rを求めることができない。
【0006】
図3(b),(c)は、何れも、従来の走査型レーダの走査状態を簡略表示した平面図である。これらは回転走査を伴ったレーダであり、送信アンテナ34及び受信アンテナ35を搭載して軸回転する回転支持機構41が設けられている。回転支持機構41は、回転軸42を中心にして回転運動を行い、検知範囲をカバーする適宜な角度範囲で回転角θを変化させるようになっている。アンテナ34,35を回転支持機構41に搭載する際、従来のレーダでは、回転支持機構41の回転軸42と送信アンテナ34の出射中心線とが直に又は延長線上で交差する状態で、回転支持機構へのアンテナ装着がなされている。
【0007】
【特許文献1】特開平8−166443号公報
【特許文献2】特開平8−166444号公報
【特許文献3】特開2003−167048号公報
【特許文献4】特開2003−11824号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
図3(d)は走査型2周波CWレーダ50の回路ブロック図である。この2周波CWレーダ50は従来の2周波CWレーダ30に従来の回転支持機構41を合体させたものである。この2周波CWレーダ50が2周波CWレーダ30と異なるのは、同一方向を向いた送信アンテナ34及び受信アンテナ35が出射中心線を回転軸42と交差させる状態で回転支持機構41に搭載された点と、回転支持機構41の回転制御を行う回転支持機構41が回転角θを信号処理部51に送出するようになった点と、信号処理部38が信号処理部51に拡張されて算出距離Rと回転角θとから反射物の位置を求めるようになった点である。その位置は、例えば、回転軸42基準の極座標であれば組データ(R,θ)とされ、二次元直交座標であれば組データ(R・cosθ,R・sinθ)とされる。
【0009】
このように2周波CWレーダに回転走査機能を付加することでも、或る程度の広がりを持った検知範囲の中に在る物体までの距離を計測することができ、踏切障害物検知装置(特許文献4参照)等への応用も期待される。
もっとも、静止物体を検知できないという弱点が克服されていないまま、上述したような直截的態様で、従来の2周波CW方式と従来の回転走査方式とを組み合わせたのでは、直ちにFMCW方式を置き換えて検知精度を向上させる、ということにはならない。
【0010】
これに対し、2周波CW方式であっても、高周波信号を周波数掃引させることで、静止物体を検知できるようになったものがある(特許文献3の解決手段欄等を参照)。
しかしながら、周波数掃引方式では一掃引の時間中に反射物がほとんど移動しないことが前提となるため、送信波の方向が変化する回転走査方式と組み合わせると、周波数掃引中に反射物が次々に相対移動してしまうため、周波数掃引方式と回転走査方式とは相性が悪い。
【0011】
また、アンテナ34,35を出射中心線の方向に振動させるといったことで、静止物体との相対速度を生じさせることも考えられるが、これも同様の理由で回転走査方式との相性が悪いばかりか、機構が複雑になるうえ壊れやすくもなる、といった不都合がある。
そこで、回転走査機能を付加するに際して2周波CWレーダと回転支持機構との結合態様に工夫を凝らすことにより、静止物体も測距可能な回転走査型2周波CWレーダを簡素な構成で実現することが技術的な課題となる。
【課題を解決するための手段】
【0012】
本発明の2周波CWレーダは(解決手段1)、このような課題を解決するために創案されたものであり、同一方向を向いた別体の又は一体の送信アンテナ及び受信アンテナと、周波数の異なる連続波を前記送信アンテナから空中へ送信波として出射する送信部と、前記受信アンテナで受信した反射波からドップラー低周波信号を検出する受信部と、前記ドップラー低周波信号のうち検出元の反射波の発生元の送信波の周波数の異なるものから位相差を検出して反射物までの距離を算出する信号処理部とを備えた2周波CWレーダにおいて、前記送信アンテナ及び前記受信アンテナを搭載して軸回転する回転支持機構が設けられ、その回転軸と前記送信アンテナの出射中心線との関係が「ねじれの位置の直線」になる状態で前記送信アンテナ及び前記受信アンテナが前記回転支持機構に装着されていることを特徴とする。
【0013】
また、本発明の2周波CWレーダは(解決手段2)、上記解決手段1の2周波CWレーダであって、前記信号処理部または他の演算部が、前記回転支持機構の回転角と前記信号処理部の算出距離とから前記反射物の位置を算出するようになっている、ことを特徴とする。
【0014】
さらに、本発明の2周波CWレーダは(解決手段3)、上記解決手段1,2の2周波CWレーダであって、前記回転支持機構が、前記軸回転に際して、双方向に回転することにより、いわゆる首振り運動を行うものであり、前記信号処理部または他の演算部が、回転方向を異にする算出距離を一つの算出値に纏めるようになっている、ことを特徴とする。
【0015】
また、本発明の2周波CWレーダは(解決手段4)、上記解決手段3の2周波CWレーダであって、前記信号処理部が、前記反射物までの距離に加えて前記反射物との相対速度も算出するものであり、前記信号処理部または他の演算部が、回転方向を異にする算出距離を一つの算出値に纏める際に前記反射物との相対速度の絶対値が大きいときの算出距離を前記算出値として採択するようになっている、ことを特徴とする。
【発明の効果】
【0016】
このような本発明の2周波CWレーダにあっては(解決手段1)、回転支持機構と組み合わせてそれに送信アンテナと受信アンテナを装着するに際して、送信アンテナの出射中心線と回転支持機構の回転軸との関係がねじれの位置の直線になるようにしたことにより、検知範囲の走査のために回転支持機構が回転動作すると、それに随伴してアンテナが円弧状軌跡を描いて移動し、その移動速度から「ねじれ」の関係に応じて出射中心線の方向の速度成分が一意に決まるが、このアンテナの出射中心線方向速度成分が「交差」状態での搭載時のゼロと異なり「ねじれ」状態での搭載ではゼロでなくなるので、アンテナと静止物体との間に相対速度が生じて、静止物体でも検知することが可能となる。
【0017】
このように、2周波CWレーダに回転走査機能を付加する際、回転支持機構へのアンテナの装着状態を「交差」の関係でなく「ねじれ」の関係にして、回転走査に伴って静止物体との相対速度が生じるようにしたことにより、周波数掃引回路等の追加や振動機構の追加を行うまでもなく、また従来の2周波CW方式と従来の回転走査方式とを直截的態様で組み合わせたのと同程度の簡素な構成でありながら、反射物が静止していてもアンテナから反射物までの距離を測定することが可能になる。
したがって、この発明によれば、静止物体も測距可能な回転走査型2周波CWレーダを簡素な構成で実現することができる。
【0018】
また、本発明の2周波CWレーダにあっては(解決手段2)、反射物の位置が信号処理部の算出距離と回転支持機構の回転角とから算出されるので、走査先に広がる検知範囲の全域について、その中に存在している物体を検知することができる。
したがって、この発明によれば、走査範囲全域の静止物体も測距可能な回転走査型2周波CWレーダを簡素な構成で実現することができる。
【0019】
さらに、本発明の2周波CWレーダにあっては(解決手段3)、回転走査に際して、双方向回転による首振り運動が行われ、さらに、回転方向を異にする2つの算出距離が一つの算出値に纏められる。首振り運動によって同一反射物に2つの相対速度が生じ、何れか一方または双方の相対速度がゼロ以外になるため、そのような回転方向の異なるときの算出距離を纏めて一つの算出値にすると、たまたま双方回転の一方では相対速度のゼロになる物体が走査範囲に存在していたときでも双方回転の他方では相対速度がゼロでなくなるので、走査速度に対応した速度で移動していて一方向回転では検出できない物体も確実に検出して測距することができる。
したがって、この発明によれば、静止物体も特定速度の移動物体も測距可能な回転走査型2周波CWレーダを簡素な構成で実現することができる。
【0020】
また、本発明の2周波CWレーダにあっては(解決手段4)、反射物までの距離に加えて反射物との相対速度も算出され、回転方向を異にする2つの算出距離のうちから、対応する相対速度の絶対値の大きい方のものが選択され、これが、2つの算出距離を纏めた一つの算出値として、採用される。2周波CW方式では、反射物が想定外の高速で移動する場合は別として一般に、アンテナと反射物との相対速度が大きい方が測定精度が良くなる傾向があるので、相対速度の大小に基づく採択により、相対速度ゼロによる測距不能が回避されると同時に、精度の良い測定結果が得られる。
したがって、この発明によれば、静止物体も特定速度の移動物体も精度良く測距しうる回転走査型2周波CWレーダを簡素な構成で実現することができる。
【発明を実施するための最良の形態】
【0021】
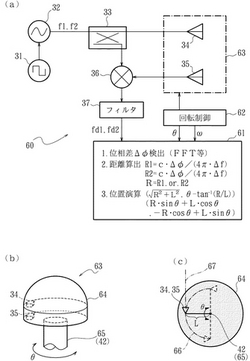
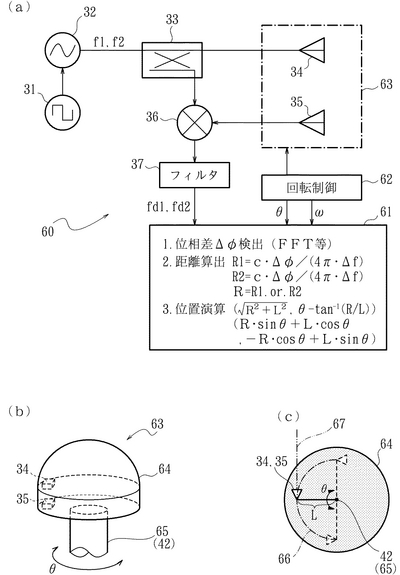
このような本発明の2周波CWレーダの一実施形態について、その具体的な構成を、図面を引用して説明する。図1は、2周波CWレーダ60の要部構造を示し、(a)が回路ブロック図、(b)が回転支持機構63の要部斜視図、(c)がその平面図である。
なお、それらの図示に際し既述した2周波CWレーダ50と同様の構成要素には同一の符号を付して示したので、重複する再度の説明は割愛し、以下、それとの相違点を中心に説明する。
【0022】
この2周波CWレーダ60が既述の2周波CWレーダ50と相違するのは(図1(a)参照)、回転支持機構41に代わる回転支持機構63がアンテナ34,35を「ねじれ」状態で搭載するようになった点と、回転制御部52に代わる回転制御部62が回転角θに加えて回転方向ωも送出するようになった点と、信号処理部51に代わる信号処理部61が位相差Δφ検出後の距離算出に際しては回転方向ωの異なる算出距離R1,R2を一つの算出値Rに纏めるようになり更に位置演算に際しては「ねじれ」状態に基づく補正を行うようになった点である。送信部31〜33や,アンテナ34,35,受信部36〜37は、基本的に従来と同じである。
【0023】
回転支持機構63は(図1(b)参照)、アンテナ34,35を搭載するため耐候性を考慮したレドーム64と、それを上端で支える支軸65とからなり、支軸65の下端部が図示しないモータや回転伝動機構に連結されていて、回転制御部62の制御に従って軸回転するようになっている。その回転は、いわゆる首振り運動であり、支軸65の芯を通る回転軸42を中心にして所定の角度範囲内で往復する双方向回転・揺動である。その回転状態を検出して又は回転の制御指令等を代用して、回転角θと回転方向ωとが適宜な角度ピッチΔθ毎に求められ、それらが回転制御部62から信号処理部61へ送出されるようにもなっている。
【0024】
レドーム64にアンテナ34,35を装着するとき(図1(c)参照)、アンテナ34,35を回転軸42から離して離隔距離Lがゼロでなくなるようにし、回転支持機構63の首振り運動によるアンテナ34,35の円弧状軌跡66に対して出射中心線67が接線になる方向へアンテナ34,35(特に空中線)を向けさせることにより、出射中心線67と回転軸42との関係が「ねじれの位置の直線」状態になる。その「ねじれ」状態は、アンテナ34,35の向きを変えても、出射中心線67又はその延長線が回転軸42と交差しなければ、維持される。
【0025】
信号処理部61は(図1(a)参照)、位相差Δφ検出については従来通りドップラシフト周波数fd1,fd2 のドップラー低周波信号にFFTを施す等のことで行うが、距離算出については次のように拡張されている。すなわち、回転方向ωが正転のときには距離R1の算出を行い、回転方向ωが逆転のときには距離R2の算出を行い、さらに回転方向を異にする算出距離R1,R2を一つの算出値Rに纏めるようになっている。個々の距離R1,R2の算出は、既述した所定式[c・Δφ/(4π・Δf)]の演算にて同様に行われるが、回転方向が異なり、位相差Δφの得られる時期がずれているので、図示しないメモリ等に一時記憶されるようになっている。
【0026】
例えば、回転角θの全範囲を角度ピッチΔθで除した数より多くの要素を持った配列が三つほどメモリに確保され、先ず正転時には逐次得られた算出距離R1が一番目の配列に並べて記憶され、続いて逆転時には逐次得られた算出距離R2が二番目の配列に並べて記憶され、最後に、それらが揃ったところで算出距離R(一つの算出値R)が求められ、これも三番目の配列に並べて記憶される。算出距離R1,R2を算出距離Rに纏める演算は、各配列において位置の対応している要素ごとに行われ、算出距離R1,R2の何れか一方が算出距離Rに採択される。なお、逆転時に距離R2を算出する度に距離Rへの纏めと一番目の配列への上書きとを行うようにすれば、二,三番目の配列は省くことができる。
【0027】
距離Rの採択は、算出距離R1,R2のうちアンテナに近い方を採用するのでも良く、反射物が在って算出距離R1が得られればそれを採用し算出距離R1が得られないときだけ算出距離R2を採用するのでも良いが、この2周波CWレーダ60では、位相差Δφ検出の際に反射物との相対速度も逐次算出してそれらを算出距離R等と同様に四,五番目の配列に記憶しておき、各配列において位置の対応している要素ごとに、算出距離R1,R2のうち相対速度の絶対値の大きいときのものを算出距離Rに採択するようになっている。なお、反射物とアンテナ34,35との相対速度はドップラー低周波信号からドップラシフト周波数fd1,fd2 を検出する等のことで得られる(例えば特許文献1〜3参照)。
【0028】
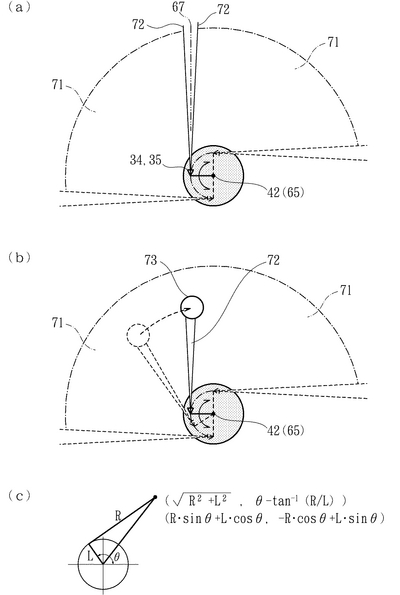
さらに、信号処理部61は、算出距離Rと回転角θとから反射物の位置を算出する位置演算に際して、ねじれ状態に基づく補正も行うべく、離隔距離Lも算出式に含められるようになっている。すなわち、反射物の位置は(図2(c)参照)、
回転軸42基準の極座標であれば、
組データ(√(R2+L2),θ−tan−1(R/L))とされ、
回転軸42基準の二次元直交座標であれば、
組データ(R・sinθ+L・cosθ,−R・cosθ+L・sinθ)とされる。
【0029】
この実施形態の2周波CWレーダ60について、その使用態様及び動作を、図面を引用して説明する。図2は、(a),(b)何れも平面図であって、(a)が検知範囲、(b)が検知状態を示している。
【0030】
支軸65が鉛直になり出射中心線67が水平になるよう回転支持機構63を設置し、その首振り角度を例えば180゜にセットして、2周波CWレーダ60を稼動させると回転軸42を中心に略半円状に広がる水平な検知範囲71を出射中心線67が往復走査する(図2(a)参照)。そして、出射中心線67を囲む連続波の出射範囲72はアンテナ視野角に応じて決まり距離測定では細く絞られるが、この出射範囲72に反射物が入ると、反射波が受信され、反射物とアンテナ34,35との相対速度がゼロでなければ、そのときの距離や位置がドップラー低周波信号から得られる。
【0031】
そこまでは従来通りであるが、この実施形態では、出射中心線67と回転軸42との関係が「ねじれの位置の直線」状態になっていて、アンテナ34,35が出射中心線67方向に明確な非零の速度を持っているため、反射物が静止物体であったとしても、両者の間に相対速度が存在するので、反射物までの距離や反射物の位置が求まる。距離は送信アンテナ34から反射物までのもので従来と同じく既述の式で算出されるが、送信アンテナ34が回転軸42から距離Lだけ離れた「ねじれ」状態にあるので、反射物の位置は、従来と異なり、補正のために離隔距離Lを含んだ上述の式で算出される。
【0032】
さらに、この実施形態では、首振り運動の回転方向ωが正転のときには、角度ピッチΔθの回転毎に、距離R1が算出されて一番目の配列に一時記憶されるとともに、相対速度も算出されて四番目の配列に一時記憶される。また、首振り運動の回転方向ωが逆転のときには、角度ピッチΔθの回転毎に、距離R2が算出されて二番目の配列に一時記憶されるとともに、相対速度も算出されて五番目の配列に一時記憶される。そして、それらが揃ったところで、やはり角度ピッチΔθ対応の各配列要素毎に、算出距離R1,R2のうち相対速度の絶対値の大きいときのものが算出距離Rとして採択される。それから、離隔距離Lを含んだ上述式の演算が、やはり角度ピッチΔθ対応の各配列要素毎に行われて、回転軸42を基準にした反射物の位置が得られる。
【0033】
こうして、回転支持機構63が正転と逆転とを行って出射中心線67が検知範囲71を一往復する度に、検知範囲71の全域について反射物の位置が求まる。
反射物の位置は、例えば正転時に出射範囲72の走査とたまたま同一速度で反射物73が移動していたときでも(図2(b)参照)、逆転時にはアンテナ34,35の移動速度を倍加した相対速度が生じるので、算出距離R1,R2のうち相対速度の大きい方を算出距離Rに採択することとも相俟って、より正確に検出される。
【0034】
[その他]
上記実施形態では、2周波CW方式の具体化に際して、同一方向を向いた別体のアンテナ34,35を設けたが、これらのアンテナは一体でも良く、また、周波数f1,f2の異なる連続波が交互に発生・出射されるようになっていたが、これらの連続波は同時に発生・出射されるようにしても良く、混合器36で受信信号と混合させる高周波を別途生成して信号分配器33を省いても良い(例えば特許文献3の段落0009,0011,0019,0021参照)。
また、信号処理部61は、単体のマイクロプロセッサやデジタルシグナルプロセッサ等で構成しても良く、複数のプロセッサで構成しても良く、複数の場合、FFTや,距離算出,位置算出などの演算を各プロセッサに分散させるようにしても良い。
【産業上の利用可能性】
【0035】
本発明の2周波CWレーダは、アンテナ34,35を搭載した回転支持機構63を鉄道の踏切脇に設置するとともに、信号処理部61に踏切設置物と障害物との判別プログラム等を追加インストールすることで、踏切障害物検知装置になるが、その他、アンテナ34,35を搭載した回転支持機構63を駅のホーム下に設置するとともに、信号処理部61に線路脇施工物と転落者との判別プログラム等を追加インストールすることで、駅のホーム下への転落者の検知装置にも適用できる。
【図面の簡単な説明】
【0036】
【図1】本発明の一実施形態について、2周波CWレーダの要部構造を示し、(a)が回路ブロック図、(b)が回転支持機構の要部斜視図、(c)がその平面図である。
【図2】何れも平面図であって、(a)が検知範囲、(b)が検知状態、(c)が位置関係を示している。
【図3】(a)が従来の2周波CWレーダのブロック図、(b)及び(c)が従来レーダの走査状態を示す平面図、(d)が両者を合体させた2周波CWレーダの回路ブロック図である。
【符号の説明】
【0037】
30…2周波CWレーダ、
31…変調器、32…高周波発信器、33…信号分配器、34…送信アンテナ、
35…受信アンテナ、36…混合器、37…フィルタ、38…信号処理部、
41…回転支持機構、42…回転軸、
50…2周波CWレーダ、51…信号処理部、52…回転制御部、
60…2周波CWレーダ、
61…信号処理部、62…回転制御部、63…回転支持機構、
64…レドーム、65…支軸、66…軌跡、67…出射中心線、
71…検知範囲、72…出射範囲、73…反射物
【技術分野】
【0001】
この発明は、反射物までの距離を測定する2周波CW(Continuous Wave、連続波)レーダに関し、詳しくは、回転走査を伴って検知範囲の広い2周波CWレーダに関する。
このような2周波CWレーダは、鉄道の踏切における障害物の検知や、駅のホーム下への転落者の検知などに、有用である。
【背景技術】
【0002】
或る程度の広がりを持った検知範囲の中に在る物体までの距離を計測するには、回転走査を伴ったレーダ方式が適しており、その具体化には、一般に、静止物体の検出も可能なFMCW(Frequency Modulation Continuous Wave)方式が用いられている。しかし、この方式では、周波数帯域の制限から、高い検知精度が得られない。
一方、物体(反射物)までの距離に対応して変化する反射波の位相差に基づいて距離計測を行う2周波CW方式は(例えば特許文献1〜3参照)、測距精度は高いものの、センサ(アンテナ)と反射物との相対速度がゼロになっていると、その物体を検知できなくなる(特許文献3の課題欄を参照)、という弱点がある。
【0003】
図3(a)は、そのような従来の2周波CWレーダ30の基本構成を示すブロック図である(特許文献3図2参照)。この2周波CWレーダ30は、同一方向を向いた別体の送信アンテナ34及び受信アンテナ35と、変調器31にて変調される高周波発信器32から周波数f1,f2の異なる連続波を発生させそれを信号分配器33経由で送信アンテナ34から空中へ送信波として出射する送信部31〜33と、受信アンテナ35で受信した反射波から混合器36とフィルタ37にてドップラシフト周波数fd1,fd2 のドップラー低周波信号を検出する受信部36〜37と、そのドップラー低周波信号のうち検出元の反射波の発生元の送信波の周波数の異なるものから位相差Δφを検出して反射物までの距離Rを算出する信号処理部38とを具えている。
【0004】
このような2周波CWレーダ30は(特許文献3の従来技術欄を参照、ここではその要点を再掲する)、高周波発信器32により生成される高周波信号を変調器31で変調することで、周波数がΔfだけ離れた2つの連続波(周波数f1,f2)を生成する。この連続波は、信号分配器33により分配され、一方は送信アンテナ34により放射(出射)される。この送信波は、出射範囲に物体が在ると、それにより反射され、受信アンテナ35で受信される。この反射波を高周波信号で検波すると、すなわち、反射波の受信信号と、信号分配器33により分配された対応する連続波(周波数f1,f2)とを、混合器36でミキシングし、更にフィルタ37で高周波成分をカットすると、連続波(周波数f1,f2)に対応したドップラー低周波信号(周波数fd1,fd2 )が得られる。
【0005】
周波数fd1,fd2 はほとんど違わないので、等しいものとして、FFT(Fast Fourier Transform)等にてドップラー低周波信号(周波数fd1,fd2 )の位相差Δφを求め、更に、上述の周波数差Δfや物理定数の光速cを用いて所定式[c・Δφ/(4π・Δf)]を演算することにより、距離Rが算出される。
この場合(特許文献3の課題欄を参照)、反射物とアンテナ34,35との間に相対速度が存在することにより生じるドップラシフト周波数fd1,fd2 のドップラー低周波信号を検出して算出距離Rを得ていることから、反射物とアンテナとの間に相対速度が存在しなければ、即ち物体が静止しているときには、反射波を高周波信号で検波した結果が直流成分のみとなり、ドップラー低周波信号が得られないため、位相差Δφが存在せず、反射物までの距離Rを求めることができない。
【0006】
図3(b),(c)は、何れも、従来の走査型レーダの走査状態を簡略表示した平面図である。これらは回転走査を伴ったレーダであり、送信アンテナ34及び受信アンテナ35を搭載して軸回転する回転支持機構41が設けられている。回転支持機構41は、回転軸42を中心にして回転運動を行い、検知範囲をカバーする適宜な角度範囲で回転角θを変化させるようになっている。アンテナ34,35を回転支持機構41に搭載する際、従来のレーダでは、回転支持機構41の回転軸42と送信アンテナ34の出射中心線とが直に又は延長線上で交差する状態で、回転支持機構へのアンテナ装着がなされている。
【0007】
【特許文献1】特開平8−166443号公報
【特許文献2】特開平8−166444号公報
【特許文献3】特開2003−167048号公報
【特許文献4】特開2003−11824号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
図3(d)は走査型2周波CWレーダ50の回路ブロック図である。この2周波CWレーダ50は従来の2周波CWレーダ30に従来の回転支持機構41を合体させたものである。この2周波CWレーダ50が2周波CWレーダ30と異なるのは、同一方向を向いた送信アンテナ34及び受信アンテナ35が出射中心線を回転軸42と交差させる状態で回転支持機構41に搭載された点と、回転支持機構41の回転制御を行う回転支持機構41が回転角θを信号処理部51に送出するようになった点と、信号処理部38が信号処理部51に拡張されて算出距離Rと回転角θとから反射物の位置を求めるようになった点である。その位置は、例えば、回転軸42基準の極座標であれば組データ(R,θ)とされ、二次元直交座標であれば組データ(R・cosθ,R・sinθ)とされる。
【0009】
このように2周波CWレーダに回転走査機能を付加することでも、或る程度の広がりを持った検知範囲の中に在る物体までの距離を計測することができ、踏切障害物検知装置(特許文献4参照)等への応用も期待される。
もっとも、静止物体を検知できないという弱点が克服されていないまま、上述したような直截的態様で、従来の2周波CW方式と従来の回転走査方式とを組み合わせたのでは、直ちにFMCW方式を置き換えて検知精度を向上させる、ということにはならない。
【0010】
これに対し、2周波CW方式であっても、高周波信号を周波数掃引させることで、静止物体を検知できるようになったものがある(特許文献3の解決手段欄等を参照)。
しかしながら、周波数掃引方式では一掃引の時間中に反射物がほとんど移動しないことが前提となるため、送信波の方向が変化する回転走査方式と組み合わせると、周波数掃引中に反射物が次々に相対移動してしまうため、周波数掃引方式と回転走査方式とは相性が悪い。
【0011】
また、アンテナ34,35を出射中心線の方向に振動させるといったことで、静止物体との相対速度を生じさせることも考えられるが、これも同様の理由で回転走査方式との相性が悪いばかりか、機構が複雑になるうえ壊れやすくもなる、といった不都合がある。
そこで、回転走査機能を付加するに際して2周波CWレーダと回転支持機構との結合態様に工夫を凝らすことにより、静止物体も測距可能な回転走査型2周波CWレーダを簡素な構成で実現することが技術的な課題となる。
【課題を解決するための手段】
【0012】
本発明の2周波CWレーダは(解決手段1)、このような課題を解決するために創案されたものであり、同一方向を向いた別体の又は一体の送信アンテナ及び受信アンテナと、周波数の異なる連続波を前記送信アンテナから空中へ送信波として出射する送信部と、前記受信アンテナで受信した反射波からドップラー低周波信号を検出する受信部と、前記ドップラー低周波信号のうち検出元の反射波の発生元の送信波の周波数の異なるものから位相差を検出して反射物までの距離を算出する信号処理部とを備えた2周波CWレーダにおいて、前記送信アンテナ及び前記受信アンテナを搭載して軸回転する回転支持機構が設けられ、その回転軸と前記送信アンテナの出射中心線との関係が「ねじれの位置の直線」になる状態で前記送信アンテナ及び前記受信アンテナが前記回転支持機構に装着されていることを特徴とする。
【0013】
また、本発明の2周波CWレーダは(解決手段2)、上記解決手段1の2周波CWレーダであって、前記信号処理部または他の演算部が、前記回転支持機構の回転角と前記信号処理部の算出距離とから前記反射物の位置を算出するようになっている、ことを特徴とする。
【0014】
さらに、本発明の2周波CWレーダは(解決手段3)、上記解決手段1,2の2周波CWレーダであって、前記回転支持機構が、前記軸回転に際して、双方向に回転することにより、いわゆる首振り運動を行うものであり、前記信号処理部または他の演算部が、回転方向を異にする算出距離を一つの算出値に纏めるようになっている、ことを特徴とする。
【0015】
また、本発明の2周波CWレーダは(解決手段4)、上記解決手段3の2周波CWレーダであって、前記信号処理部が、前記反射物までの距離に加えて前記反射物との相対速度も算出するものであり、前記信号処理部または他の演算部が、回転方向を異にする算出距離を一つの算出値に纏める際に前記反射物との相対速度の絶対値が大きいときの算出距離を前記算出値として採択するようになっている、ことを特徴とする。
【発明の効果】
【0016】
このような本発明の2周波CWレーダにあっては(解決手段1)、回転支持機構と組み合わせてそれに送信アンテナと受信アンテナを装着するに際して、送信アンテナの出射中心線と回転支持機構の回転軸との関係がねじれの位置の直線になるようにしたことにより、検知範囲の走査のために回転支持機構が回転動作すると、それに随伴してアンテナが円弧状軌跡を描いて移動し、その移動速度から「ねじれ」の関係に応じて出射中心線の方向の速度成分が一意に決まるが、このアンテナの出射中心線方向速度成分が「交差」状態での搭載時のゼロと異なり「ねじれ」状態での搭載ではゼロでなくなるので、アンテナと静止物体との間に相対速度が生じて、静止物体でも検知することが可能となる。
【0017】
このように、2周波CWレーダに回転走査機能を付加する際、回転支持機構へのアンテナの装着状態を「交差」の関係でなく「ねじれ」の関係にして、回転走査に伴って静止物体との相対速度が生じるようにしたことにより、周波数掃引回路等の追加や振動機構の追加を行うまでもなく、また従来の2周波CW方式と従来の回転走査方式とを直截的態様で組み合わせたのと同程度の簡素な構成でありながら、反射物が静止していてもアンテナから反射物までの距離を測定することが可能になる。
したがって、この発明によれば、静止物体も測距可能な回転走査型2周波CWレーダを簡素な構成で実現することができる。
【0018】
また、本発明の2周波CWレーダにあっては(解決手段2)、反射物の位置が信号処理部の算出距離と回転支持機構の回転角とから算出されるので、走査先に広がる検知範囲の全域について、その中に存在している物体を検知することができる。
したがって、この発明によれば、走査範囲全域の静止物体も測距可能な回転走査型2周波CWレーダを簡素な構成で実現することができる。
【0019】
さらに、本発明の2周波CWレーダにあっては(解決手段3)、回転走査に際して、双方向回転による首振り運動が行われ、さらに、回転方向を異にする2つの算出距離が一つの算出値に纏められる。首振り運動によって同一反射物に2つの相対速度が生じ、何れか一方または双方の相対速度がゼロ以外になるため、そのような回転方向の異なるときの算出距離を纏めて一つの算出値にすると、たまたま双方回転の一方では相対速度のゼロになる物体が走査範囲に存在していたときでも双方回転の他方では相対速度がゼロでなくなるので、走査速度に対応した速度で移動していて一方向回転では検出できない物体も確実に検出して測距することができる。
したがって、この発明によれば、静止物体も特定速度の移動物体も測距可能な回転走査型2周波CWレーダを簡素な構成で実現することができる。
【0020】
また、本発明の2周波CWレーダにあっては(解決手段4)、反射物までの距離に加えて反射物との相対速度も算出され、回転方向を異にする2つの算出距離のうちから、対応する相対速度の絶対値の大きい方のものが選択され、これが、2つの算出距離を纏めた一つの算出値として、採用される。2周波CW方式では、反射物が想定外の高速で移動する場合は別として一般に、アンテナと反射物との相対速度が大きい方が測定精度が良くなる傾向があるので、相対速度の大小に基づく採択により、相対速度ゼロによる測距不能が回避されると同時に、精度の良い測定結果が得られる。
したがって、この発明によれば、静止物体も特定速度の移動物体も精度良く測距しうる回転走査型2周波CWレーダを簡素な構成で実現することができる。
【発明を実施するための最良の形態】
【0021】
このような本発明の2周波CWレーダの一実施形態について、その具体的な構成を、図面を引用して説明する。図1は、2周波CWレーダ60の要部構造を示し、(a)が回路ブロック図、(b)が回転支持機構63の要部斜視図、(c)がその平面図である。
なお、それらの図示に際し既述した2周波CWレーダ50と同様の構成要素には同一の符号を付して示したので、重複する再度の説明は割愛し、以下、それとの相違点を中心に説明する。
【0022】
この2周波CWレーダ60が既述の2周波CWレーダ50と相違するのは(図1(a)参照)、回転支持機構41に代わる回転支持機構63がアンテナ34,35を「ねじれ」状態で搭載するようになった点と、回転制御部52に代わる回転制御部62が回転角θに加えて回転方向ωも送出するようになった点と、信号処理部51に代わる信号処理部61が位相差Δφ検出後の距離算出に際しては回転方向ωの異なる算出距離R1,R2を一つの算出値Rに纏めるようになり更に位置演算に際しては「ねじれ」状態に基づく補正を行うようになった点である。送信部31〜33や,アンテナ34,35,受信部36〜37は、基本的に従来と同じである。
【0023】
回転支持機構63は(図1(b)参照)、アンテナ34,35を搭載するため耐候性を考慮したレドーム64と、それを上端で支える支軸65とからなり、支軸65の下端部が図示しないモータや回転伝動機構に連結されていて、回転制御部62の制御に従って軸回転するようになっている。その回転は、いわゆる首振り運動であり、支軸65の芯を通る回転軸42を中心にして所定の角度範囲内で往復する双方向回転・揺動である。その回転状態を検出して又は回転の制御指令等を代用して、回転角θと回転方向ωとが適宜な角度ピッチΔθ毎に求められ、それらが回転制御部62から信号処理部61へ送出されるようにもなっている。
【0024】
レドーム64にアンテナ34,35を装着するとき(図1(c)参照)、アンテナ34,35を回転軸42から離して離隔距離Lがゼロでなくなるようにし、回転支持機構63の首振り運動によるアンテナ34,35の円弧状軌跡66に対して出射中心線67が接線になる方向へアンテナ34,35(特に空中線)を向けさせることにより、出射中心線67と回転軸42との関係が「ねじれの位置の直線」状態になる。その「ねじれ」状態は、アンテナ34,35の向きを変えても、出射中心線67又はその延長線が回転軸42と交差しなければ、維持される。
【0025】
信号処理部61は(図1(a)参照)、位相差Δφ検出については従来通りドップラシフト周波数fd1,fd2 のドップラー低周波信号にFFTを施す等のことで行うが、距離算出については次のように拡張されている。すなわち、回転方向ωが正転のときには距離R1の算出を行い、回転方向ωが逆転のときには距離R2の算出を行い、さらに回転方向を異にする算出距離R1,R2を一つの算出値Rに纏めるようになっている。個々の距離R1,R2の算出は、既述した所定式[c・Δφ/(4π・Δf)]の演算にて同様に行われるが、回転方向が異なり、位相差Δφの得られる時期がずれているので、図示しないメモリ等に一時記憶されるようになっている。
【0026】
例えば、回転角θの全範囲を角度ピッチΔθで除した数より多くの要素を持った配列が三つほどメモリに確保され、先ず正転時には逐次得られた算出距離R1が一番目の配列に並べて記憶され、続いて逆転時には逐次得られた算出距離R2が二番目の配列に並べて記憶され、最後に、それらが揃ったところで算出距離R(一つの算出値R)が求められ、これも三番目の配列に並べて記憶される。算出距離R1,R2を算出距離Rに纏める演算は、各配列において位置の対応している要素ごとに行われ、算出距離R1,R2の何れか一方が算出距離Rに採択される。なお、逆転時に距離R2を算出する度に距離Rへの纏めと一番目の配列への上書きとを行うようにすれば、二,三番目の配列は省くことができる。
【0027】
距離Rの採択は、算出距離R1,R2のうちアンテナに近い方を採用するのでも良く、反射物が在って算出距離R1が得られればそれを採用し算出距離R1が得られないときだけ算出距離R2を採用するのでも良いが、この2周波CWレーダ60では、位相差Δφ検出の際に反射物との相対速度も逐次算出してそれらを算出距離R等と同様に四,五番目の配列に記憶しておき、各配列において位置の対応している要素ごとに、算出距離R1,R2のうち相対速度の絶対値の大きいときのものを算出距離Rに採択するようになっている。なお、反射物とアンテナ34,35との相対速度はドップラー低周波信号からドップラシフト周波数fd1,fd2 を検出する等のことで得られる(例えば特許文献1〜3参照)。
【0028】
さらに、信号処理部61は、算出距離Rと回転角θとから反射物の位置を算出する位置演算に際して、ねじれ状態に基づく補正も行うべく、離隔距離Lも算出式に含められるようになっている。すなわち、反射物の位置は(図2(c)参照)、
回転軸42基準の極座標であれば、
組データ(√(R2+L2),θ−tan−1(R/L))とされ、
回転軸42基準の二次元直交座標であれば、
組データ(R・sinθ+L・cosθ,−R・cosθ+L・sinθ)とされる。
【0029】
この実施形態の2周波CWレーダ60について、その使用態様及び動作を、図面を引用して説明する。図2は、(a),(b)何れも平面図であって、(a)が検知範囲、(b)が検知状態を示している。
【0030】
支軸65が鉛直になり出射中心線67が水平になるよう回転支持機構63を設置し、その首振り角度を例えば180゜にセットして、2周波CWレーダ60を稼動させると回転軸42を中心に略半円状に広がる水平な検知範囲71を出射中心線67が往復走査する(図2(a)参照)。そして、出射中心線67を囲む連続波の出射範囲72はアンテナ視野角に応じて決まり距離測定では細く絞られるが、この出射範囲72に反射物が入ると、反射波が受信され、反射物とアンテナ34,35との相対速度がゼロでなければ、そのときの距離や位置がドップラー低周波信号から得られる。
【0031】
そこまでは従来通りであるが、この実施形態では、出射中心線67と回転軸42との関係が「ねじれの位置の直線」状態になっていて、アンテナ34,35が出射中心線67方向に明確な非零の速度を持っているため、反射物が静止物体であったとしても、両者の間に相対速度が存在するので、反射物までの距離や反射物の位置が求まる。距離は送信アンテナ34から反射物までのもので従来と同じく既述の式で算出されるが、送信アンテナ34が回転軸42から距離Lだけ離れた「ねじれ」状態にあるので、反射物の位置は、従来と異なり、補正のために離隔距離Lを含んだ上述の式で算出される。
【0032】
さらに、この実施形態では、首振り運動の回転方向ωが正転のときには、角度ピッチΔθの回転毎に、距離R1が算出されて一番目の配列に一時記憶されるとともに、相対速度も算出されて四番目の配列に一時記憶される。また、首振り運動の回転方向ωが逆転のときには、角度ピッチΔθの回転毎に、距離R2が算出されて二番目の配列に一時記憶されるとともに、相対速度も算出されて五番目の配列に一時記憶される。そして、それらが揃ったところで、やはり角度ピッチΔθ対応の各配列要素毎に、算出距離R1,R2のうち相対速度の絶対値の大きいときのものが算出距離Rとして採択される。それから、離隔距離Lを含んだ上述式の演算が、やはり角度ピッチΔθ対応の各配列要素毎に行われて、回転軸42を基準にした反射物の位置が得られる。
【0033】
こうして、回転支持機構63が正転と逆転とを行って出射中心線67が検知範囲71を一往復する度に、検知範囲71の全域について反射物の位置が求まる。
反射物の位置は、例えば正転時に出射範囲72の走査とたまたま同一速度で反射物73が移動していたときでも(図2(b)参照)、逆転時にはアンテナ34,35の移動速度を倍加した相対速度が生じるので、算出距離R1,R2のうち相対速度の大きい方を算出距離Rに採択することとも相俟って、より正確に検出される。
【0034】
[その他]
上記実施形態では、2周波CW方式の具体化に際して、同一方向を向いた別体のアンテナ34,35を設けたが、これらのアンテナは一体でも良く、また、周波数f1,f2の異なる連続波が交互に発生・出射されるようになっていたが、これらの連続波は同時に発生・出射されるようにしても良く、混合器36で受信信号と混合させる高周波を別途生成して信号分配器33を省いても良い(例えば特許文献3の段落0009,0011,0019,0021参照)。
また、信号処理部61は、単体のマイクロプロセッサやデジタルシグナルプロセッサ等で構成しても良く、複数のプロセッサで構成しても良く、複数の場合、FFTや,距離算出,位置算出などの演算を各プロセッサに分散させるようにしても良い。
【産業上の利用可能性】
【0035】
本発明の2周波CWレーダは、アンテナ34,35を搭載した回転支持機構63を鉄道の踏切脇に設置するとともに、信号処理部61に踏切設置物と障害物との判別プログラム等を追加インストールすることで、踏切障害物検知装置になるが、その他、アンテナ34,35を搭載した回転支持機構63を駅のホーム下に設置するとともに、信号処理部61に線路脇施工物と転落者との判別プログラム等を追加インストールすることで、駅のホーム下への転落者の検知装置にも適用できる。
【図面の簡単な説明】
【0036】
【図1】本発明の一実施形態について、2周波CWレーダの要部構造を示し、(a)が回路ブロック図、(b)が回転支持機構の要部斜視図、(c)がその平面図である。
【図2】何れも平面図であって、(a)が検知範囲、(b)が検知状態、(c)が位置関係を示している。
【図3】(a)が従来の2周波CWレーダのブロック図、(b)及び(c)が従来レーダの走査状態を示す平面図、(d)が両者を合体させた2周波CWレーダの回路ブロック図である。
【符号の説明】
【0037】
30…2周波CWレーダ、
31…変調器、32…高周波発信器、33…信号分配器、34…送信アンテナ、
35…受信アンテナ、36…混合器、37…フィルタ、38…信号処理部、
41…回転支持機構、42…回転軸、
50…2周波CWレーダ、51…信号処理部、52…回転制御部、
60…2周波CWレーダ、
61…信号処理部、62…回転制御部、63…回転支持機構、
64…レドーム、65…支軸、66…軌跡、67…出射中心線、
71…検知範囲、72…出射範囲、73…反射物
【特許請求の範囲】
【請求項1】
同一方向を向いた送信アンテナ及び受信アンテナと、周波数の異なる連続波を前記送信アンテナから空中へ出射する送信部と、前記受信アンテナで受信した反射波からドップラー低周波信号を検出する受信部と、前記ドップラー低周波信号から位相差を検出して反射物までの距離を算出する信号処理部とを備えた2周波CWレーダにおいて、前記送信アンテナ及び前記受信アンテナを搭載して軸回転する回転支持機構が設けられ、その搭載が前記送信アンテナの出射中心線と前記回転支持機構の回転軸とをねじれの位置の直線にする状態でなされていることを特徴とする2周波CWレーダ。
【請求項2】
前記回転支持機構の回転角と前記信号処理部の算出距離とから前記反射物の位置を算出するものであることを特徴とする請求項1記載の2周波CWレーダ。
【請求項3】
双方向回転して首振り運動を行うとともに、回転方向を異にする算出距離を一つの算出値に纏めるものであることを特徴とする請求項2記載の2周波CWレーダ。
【請求項1】
同一方向を向いた送信アンテナ及び受信アンテナと、周波数の異なる連続波を前記送信アンテナから空中へ出射する送信部と、前記受信アンテナで受信した反射波からドップラー低周波信号を検出する受信部と、前記ドップラー低周波信号から位相差を検出して反射物までの距離を算出する信号処理部とを備えた2周波CWレーダにおいて、前記送信アンテナ及び前記受信アンテナを搭載して軸回転する回転支持機構が設けられ、その搭載が前記送信アンテナの出射中心線と前記回転支持機構の回転軸とをねじれの位置の直線にする状態でなされていることを特徴とする2周波CWレーダ。
【請求項2】
前記回転支持機構の回転角と前記信号処理部の算出距離とから前記反射物の位置を算出するものであることを特徴とする請求項1記載の2周波CWレーダ。
【請求項3】
双方向回転して首振り運動を行うとともに、回転方向を異にする算出距離を一つの算出値に纏めるものであることを特徴とする請求項2記載の2周波CWレーダ。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2006−214961(P2006−214961A)
【公開日】平成18年8月17日(2006.8.17)
【国際特許分類】
【出願番号】特願2005−30216(P2005−30216)
【出願日】平成17年2月7日(2005.2.7)
【出願人】(000207470)大同信号株式会社 (83)
【出願人】(390023928)日立エンジニアリング株式会社 (134)
【Fターム(参考)】
【公開日】平成18年8月17日(2006.8.17)
【国際特許分類】
【出願日】平成17年2月7日(2005.2.7)
【出願人】(000207470)大同信号株式会社 (83)
【出願人】(390023928)日立エンジニアリング株式会社 (134)
【Fターム(参考)】
[ Back to top ]