
3次元アトムプローブ構造データ解析方法
【課題】 3次元アトムプローブ構造データ解析方法に関し、処理が複雑で大きなリソースが要求されない簡便な方法で欠落している原子を補完して3次元的に構造を探索する。
【解決手段】 3次元アトムプローブ装置を用いて取得した試料の原子レベル微細構造データにおける原子間距離に基づいて、参照データなしに実際の試料の微細構造から欠落している原子の位置を求め、前記位置に前記原子を補完する。
【解決手段】 3次元アトムプローブ装置を用いて取得した試料の原子レベル微細構造データにおける原子間距離に基づいて、参照データなしに実際の試料の微細構造から欠落している原子の位置を求め、前記位置に前記原子を補完する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は3次元アトムプローブ構造データ解析方法に関するものであり、例えば、
3次元アトムプローブ装置を用いて取得した試料の原子レベル微細構造データを解析し、結晶状態の再現を含めた補完を行い構造再構築を行うための構成に関するものである。
【背景技術】
【0002】
近年、3次元アトムプローブ(3DAP)法は、原子レベルで微細構造を再構築する方法として開発されてきた(例えば、特許文献1或いは非特許文献1参照)。この3DAP法においては、針状に加工した試料に高電圧(電界)を印加し、電界蒸発により最表面の原子を順次イオン化して表面から離脱させ、その際の飛行時間により原子の質量を計測する。
【0003】
また、ポジションセンシティブディテクタ(PSD:位置敏感型検出器)における到達位置により2次元的な位置を決める。それらを連続して行うことにより試料の原子配列の3次元的な構造を構築するものである。
【0004】
しかし、試料のZ方向、即ち、PSDの法線方向では原子分解能が得られるものの、PSDの各検出要素間がデッドスペースとなるため、検出できる原子数が実際の試料の50〜60%程度である。
【0005】
その結果、XY方向、即ち、各原子層面内では位置精度が低くなり、従来のデータ再構築法では再構築した構造は実際の試料が結晶であってもアモルファス状となってしまい、取得したデータから結晶構造の推定ができない場合がある。そのため、物性に大きな影響を及ぼす界面の構造などが不明確となる。
【0006】
このような問題に対応するために、予め構築したデータベースを用いて、長距離周期を探索して空間群を導入し、欠落している原子を補完することが提案されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2004−117287号公報
【特許文献2】特開2008−215834号公報
【非特許文献】
【0008】
【非特許文献1】D.J.Larson,Thin Solid Films, Vol.505,pp.16−21,2006
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、上述の原子を補完する方法は、予め結晶構造がわからないと導入できないという問題がある。また、全体を均質に補完してしまうため、原子欠損や不純物原子などの欠陥、界面などに対応するのが困難である。さらに、非晶質には適用できないという問題がある。
【0010】
また、この方法は、3次元的に構造を探索することになるため、処理が複雑で大きなリソースが要求されるという問題がある。
【0011】
したがって、本発明は、処理が複雑で大きなリソースが要求されない簡便な方法で欠落している原子を補完して3次元的に構造を探索することを目的とする。
【課題を解決するための手段】
【0012】
本発明の一観点からは、3次元アトムプローブ装置を用いて取得した試料の原子レベル微細構造データにおいて、原子レベル微細構造データにおける原子間距離に基づいて、参照データなしに実際の試料の微細構造から欠落している原子の位置を求め、前記位置に前記原子を補完する3次元アトムプローブ構造データ解析方法が提供される。
【発明の効果】
【0013】
開示の3次元アトムプローブ構造データ解析方法によれば、処理が複雑で大きなリソースが要求されることなく構造データ解析を効率よく行うことが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態の3次元アトムプローブ装置の概念的構成図である。
【図2】本発明の実施の形態の3次元アトムプローブ構造データ解析方法のフローチャートである。
【図3】本発明の実施例1の3次元アトムプローブ構造データ解析方法に用いた試料の概念的断面図である。
【図4】取得したZ方向における各原子層毎の原子配置のイメージ図である。
【図5】MgO層におけるMg原子の欠陥位置の発見方法の説明図である。
【図6】MgO層におけるMg原子補完後の原子配置のイメージ図である。
【図7】MgO層におけるO原子補完後の原子配置のイメージ図である。
【図8】MgO層におけるZ方向の原子配列の補正方法の説明図である。
【図9】BaTiO3薄膜におけるTi原子とO原子の補完工程の説明図である。
【図10】BaTiO3薄膜におけるBa原子とO原子の補完工程の説明図である。
【図11】BaTiO3薄膜におけるZ方向の原子配列の補正工程の説明図である。
【発明を実施するための形態】
【0015】
ここで、図1及び図2を参照して、本発明の実施の形態を説明する。図1は本発明の実施の形態の3次元アトムプローブ装置の概念的構成図である。3次元アトムプローブ装置は針状試料1を固定するとともに所定の高電位にバイアスする支持電極2、レーザ光4を針状試料1の先端部に照射するレーザ照射手段3、位置敏感型検出器5及び電源6から構成される。
【0016】
この場合の針状試料1の先端部の直径φは例えば100nm程度であり、レーザ照射手段3としては、例えば、波長が343nmのレーザ光4を放出するフェムト秒レーザを用いる。また、針状試料1と位置敏感型検出器5との距離は例えば、10cmであり、電源6による印加電圧としては20kVとする。
【0017】
針状試料1に対して電源6により高電界を印加した状態でその先端にレーザ光4を照射してレーザ・アシスト電界蒸発により最表面の原子を順次イオン化して表面から離脱させる。離脱した原子を、原子層毎に位置敏感型検出器5により順次検出し、飛行時間により原子の質量を計測して、各原子層毎の面内データを取得する。
【0018】
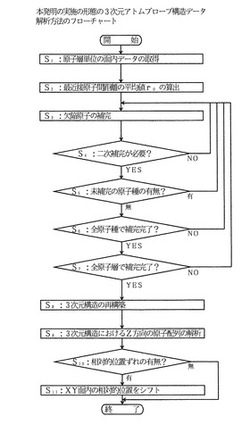
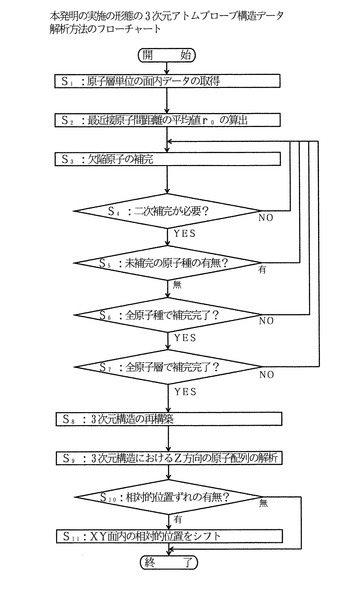
図2は本発明の実施の形態の3次元アトムプローブ構造データ解析方法のフローチャートである。まず、
ステップ1:3DAP装置により原子層単位の面内データを取得する。
ステップ2:各面内データにおいて、同種原子間の原子間距離を算出して、最近接原子間距離の平均値r0を求める。
ステップ3:検出した原子を中心として半径r0の円をそれぞれ描画し、複数の円が交わるか、または接する位置x(r0≦x<2r0)にある空領域に同種の原子を補完する( 一次補完) 。
ステップ4:必要に応じて、補完した原子も加えた新たな原子層データから、再度の補完が必要か否かを判定する。必要と判断した場合には、ステップ3に戻って補完(二次補完)を行う。なお、必要か否かは経験則によるものであり、通常は三次補完は行わずに二回の補完で終了する。
ステップ5:被分析対象が化合物の場合、補完を行っていない他の原子に対してもステップ3及びステップ4の補完を行う。
ステップ6:原子層における全ての種類の原子について補完が行われたか否かを判定し、行われた場合にはステップ7に進む。
ステップ7:全ての原子層について補完が行われたか否かを判定し、行われた場合にはステップ8に進む。
ステップ8:補完した各原子層毎のデータを基にして3次元構造を再構築する。
ステップ9:3次元構造におけるZ方向の原子配列を解析する。
ステップ10:XY面内の相対的位置ずれがあるか否かを判定し、ずれがない場合には工程を終了し、ずれがある場合にはステップ11に進む。
ステップ11:XY面内の相対的位置をシフトさせて最終的な3次元構造を再構築する。
【0019】
なお、補完に際しては、最近接原子位置半径r0の誤差範囲を設定して補完位置検索を行う。例えば、誤差範囲は半径r0の±5%の範囲とする。また、誤差が大きく原子位置が重なる場合には、周期性を考慮してその位置の原子を決める。以上の各ステップは、プログラムにより自動的に行う。
【0020】
このように、本発明の3次元アトムプローブ構造データ解析方法は、予め結晶構造を把握しておく必要がない簡単な補完法であるので、構造データ解析を迅速に行うことができる。特に、各原子層毎での補完、即ち、XY方向の2次元面内での補完が中心であるので、処理が複雑で大きなリソースが要求されることなく構造データ解析を効率良く行うことができる。
【0021】
また、非晶質でもある程度対応できる。即ち、非晶質といってもミクロな構造としてはある程度規則的な構造を有しており、また、マクロな構造としては配向性を有している場合があるので、このような場合には対応できることになる。
【0022】
また、原子欠損(空孔)や不純物原子にも対応可能である。即ち、不純物原子の配置は統計的には不純物濃度に規定される均一な分布であるので、面内濃度に基づいて欠落している不純物原子を平均的に補完することができる。なお、空孔の場合には試料の密度を測定して空孔濃度を測定し、あとは不純物原子を同様の扱いとする。
【実施例1】
【0023】
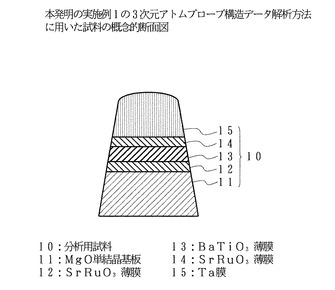
以上を前提として、次に、図3乃至図11を参照して本発明の実施例1の3次元アトムプローブ構造データ解析方法を説明する。図3は本発明の実施例1の3次元アトムプローブ構造データ解析方法に用いた試料の概念的断面図である。まず、(001)面を主面とするMgO単結晶基板11上に、高温スパッタ法により厚さが、例えば、10nmのSrRuO3薄膜12、厚さが、例えば、15nmのBaTiO3薄膜13、厚さが、例えば、10nmのSrRuO3薄膜14を順次成膜する。次いで、室温において、厚さが、例えば、30nmのTa膜15を成膜して保護膜(キャップ層)とした試料を作製する。
【0024】
次いで、3DAP分析を行うために、試料をデュアルビームFIB(収束イオンビーム)法によって尖端径φ80nm、長さ100nmに加工して分析用試料10とする。作製した分析用試料10を図1に示したレーザ・アシスト3DAP装置により分析して各原子種及び位置情報データを取得する。この原子種及び位置情報データにより構造を再構築したものが従来の3次元構造である。
【0025】
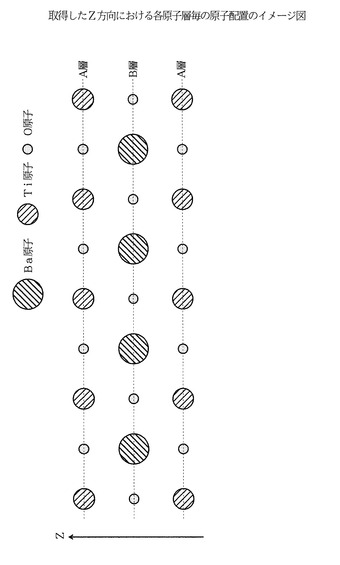
次いで、取得した生データに対し、Z方向の原子レベル空間分解能を利用して1原子層単位に面分割する。その際に、保護膜となるTa膜15は除外し、基板のMgOは例えば、5nmのみを対象とする。図4は、このようにして取得したZ方向における各原子層毎の原子配置のイメージ図であり、実際には、各原子層において本来存在するはずの原子が40%〜50%程度欠けた状態となっている。なお、図4は、BaTiO3薄膜13の原子配置を例に示している。
【0026】
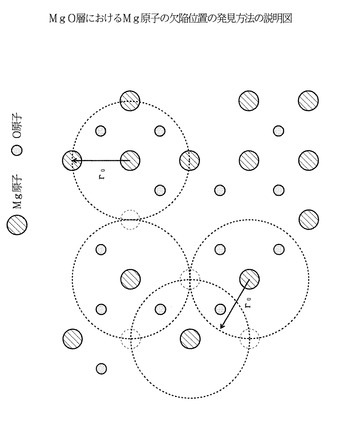
次いで、図5に示すように、始めにMgO層を選び、XY面内に分布しているMg原子から別のMg原子に対して、それぞれの最近接原子間距離を求め、その平均値をr0とする。次いで、それぞれのMg原子からそれを中心として半径r0の仮想的な円を描き、その円周上で別のMg原子の仮想円と接するかまたは交わる点の位置座標を求める。
【0027】
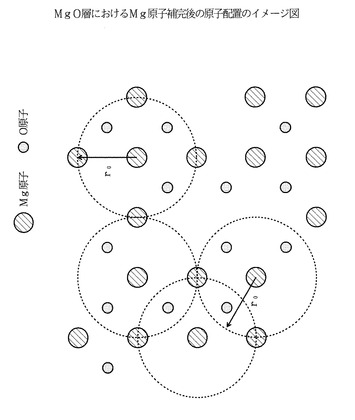
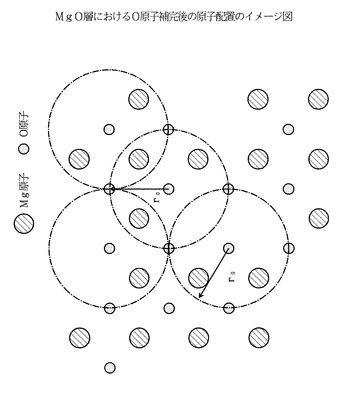
次いで、図6に示すように、その位置に原子が存在しない場合には原子欠損位置と判断して、Mg原子をその位置に補完する。補完に際しては、r0を±5 %の範囲で緩和して行った。なお、誤差設定は、補完後の構造を確認しながら設定することが望ましい。次いで、図7に示すように、同様のプロセスを同一面内に存在するO原子に対しても行う。
【0028】
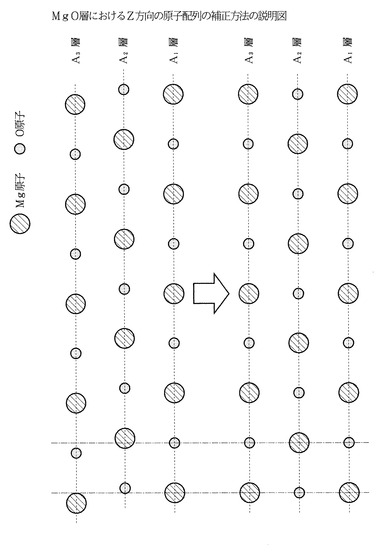
次いで、同じプロセスを別の原子面に対しても行う。5nmのMgO層の全ての原子面に対して原子補完を行った後、全体の層構造がそれぞれ結晶性と判断できたので、次に、3次元構造におけるZ方向の原子配列を解析する。図8に示すように、Z軸方向に対して、基準とする任意の一原子面、例えば、A1層を選択し、その原子面内に存在するそれぞれの原子を基準点としてZ軸方向に重なる他の原子面にある基準点の上方または下方に存在する同種の原子に対して最小二乗法による直線近似を行い、最終的にXY座標を補正する。
【0029】
同様のプロセス・フローをSrRuO3薄膜12、BaTiO3 薄膜13及びSrRuO3薄膜14に対しても行い、それぞれ再構築された層をZ座標を基に3次元的に再構築する。
【0030】
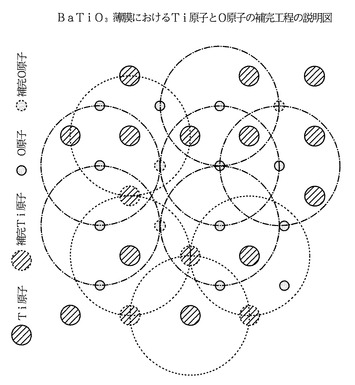
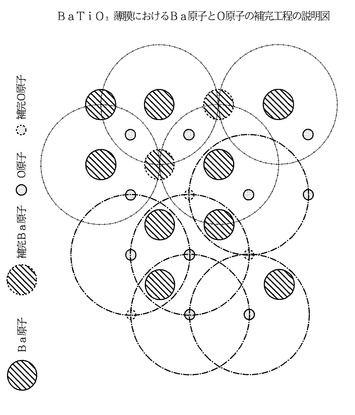
例えば、図9及び図10は図4に示したBaTiO3薄膜13の原子補完工程の説明図である。まず、図9に示すようにTi原子とO原子で構成されA層についてTi原子とO原子の補完を行う。次いで、図10に示すようにBa原子とO原子で構成されB層についてBa原子とO原子の補完を行う。
【0031】
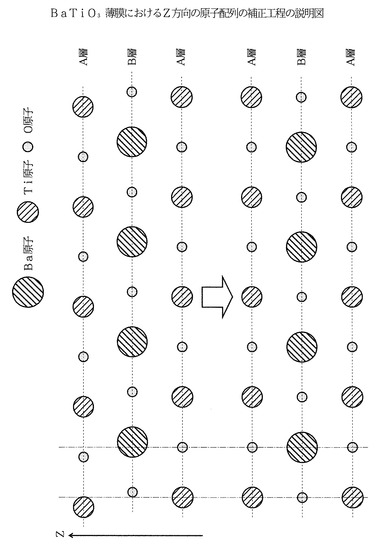
BaTiO3薄膜13の全ての原子面に対して原子補完を行った後、全体の層構造がそれぞれ結晶性と判断できたので、次に、3次元構造におけるZ方向の原子配列を解析する。図11に示すように、Z軸方向に対して、基準とする任意の一原子面、例えば、A1層を選択し、その原子面内に存在するそれぞれの原子を基準点としてZ方向に重なる他の原子面にある基準点の上方または下方に存在する同種の原子に対して最小二乗法による直線近似を行い、最終的にXY座標を補正する。次いで、SrRuO3薄膜12、14についても、Sr原子、Ru原子、O原子に対して同様の原子補完を行う。
【0032】
以上のプロセス・フローにより、欠落している原子を補完し、本来の試料が有している構造に近い仮想的な微細構造を再現することができる。
【0033】
このように、本発明の実施例1においては、各原子層毎での補完、即ち、XY方向の2次元面内での補完が中心のデータベースを必要としない簡単な補完法であるので、処理が複雑で大きなリソースが要求されることなく構造データ解析を効率良く行うことができる。
【0034】
以上、本発明の実施例1を説明したが、本発明は実施例1で説明した構成に限られるものではない。例えば、実施例1においてはレーザ・アシスト電界蒸発を用いているが、レーザ照射は必須ではなく、高電界のみで電界蒸発させても良いものである。
【符号の説明】
【0035】
1 針状試料
2 支持電極
3 レーザ照射手段
4 レーザ光
5 位置敏感型検出器
6 電源
10 分析用試料
11 MgO単結晶基板
12 SrRuO3薄膜
13 BaTiO3薄膜
14 SrRuO3薄膜
15 Ta膜
【技術分野】
【0001】
本発明は3次元アトムプローブ構造データ解析方法に関するものであり、例えば、
3次元アトムプローブ装置を用いて取得した試料の原子レベル微細構造データを解析し、結晶状態の再現を含めた補完を行い構造再構築を行うための構成に関するものである。
【背景技術】
【0002】
近年、3次元アトムプローブ(3DAP)法は、原子レベルで微細構造を再構築する方法として開発されてきた(例えば、特許文献1或いは非特許文献1参照)。この3DAP法においては、針状に加工した試料に高電圧(電界)を印加し、電界蒸発により最表面の原子を順次イオン化して表面から離脱させ、その際の飛行時間により原子の質量を計測する。
【0003】
また、ポジションセンシティブディテクタ(PSD:位置敏感型検出器)における到達位置により2次元的な位置を決める。それらを連続して行うことにより試料の原子配列の3次元的な構造を構築するものである。
【0004】
しかし、試料のZ方向、即ち、PSDの法線方向では原子分解能が得られるものの、PSDの各検出要素間がデッドスペースとなるため、検出できる原子数が実際の試料の50〜60%程度である。
【0005】
その結果、XY方向、即ち、各原子層面内では位置精度が低くなり、従来のデータ再構築法では再構築した構造は実際の試料が結晶であってもアモルファス状となってしまい、取得したデータから結晶構造の推定ができない場合がある。そのため、物性に大きな影響を及ぼす界面の構造などが不明確となる。
【0006】
このような問題に対応するために、予め構築したデータベースを用いて、長距離周期を探索して空間群を導入し、欠落している原子を補完することが提案されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2004−117287号公報
【特許文献2】特開2008−215834号公報
【非特許文献】
【0008】
【非特許文献1】D.J.Larson,Thin Solid Films, Vol.505,pp.16−21,2006
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、上述の原子を補完する方法は、予め結晶構造がわからないと導入できないという問題がある。また、全体を均質に補完してしまうため、原子欠損や不純物原子などの欠陥、界面などに対応するのが困難である。さらに、非晶質には適用できないという問題がある。
【0010】
また、この方法は、3次元的に構造を探索することになるため、処理が複雑で大きなリソースが要求されるという問題がある。
【0011】
したがって、本発明は、処理が複雑で大きなリソースが要求されない簡便な方法で欠落している原子を補完して3次元的に構造を探索することを目的とする。
【課題を解決するための手段】
【0012】
本発明の一観点からは、3次元アトムプローブ装置を用いて取得した試料の原子レベル微細構造データにおいて、原子レベル微細構造データにおける原子間距離に基づいて、参照データなしに実際の試料の微細構造から欠落している原子の位置を求め、前記位置に前記原子を補完する3次元アトムプローブ構造データ解析方法が提供される。
【発明の効果】
【0013】
開示の3次元アトムプローブ構造データ解析方法によれば、処理が複雑で大きなリソースが要求されることなく構造データ解析を効率よく行うことが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態の3次元アトムプローブ装置の概念的構成図である。
【図2】本発明の実施の形態の3次元アトムプローブ構造データ解析方法のフローチャートである。
【図3】本発明の実施例1の3次元アトムプローブ構造データ解析方法に用いた試料の概念的断面図である。
【図4】取得したZ方向における各原子層毎の原子配置のイメージ図である。
【図5】MgO層におけるMg原子の欠陥位置の発見方法の説明図である。
【図6】MgO層におけるMg原子補完後の原子配置のイメージ図である。
【図7】MgO層におけるO原子補完後の原子配置のイメージ図である。
【図8】MgO層におけるZ方向の原子配列の補正方法の説明図である。
【図9】BaTiO3薄膜におけるTi原子とO原子の補完工程の説明図である。
【図10】BaTiO3薄膜におけるBa原子とO原子の補完工程の説明図である。
【図11】BaTiO3薄膜におけるZ方向の原子配列の補正工程の説明図である。
【発明を実施するための形態】
【0015】
ここで、図1及び図2を参照して、本発明の実施の形態を説明する。図1は本発明の実施の形態の3次元アトムプローブ装置の概念的構成図である。3次元アトムプローブ装置は針状試料1を固定するとともに所定の高電位にバイアスする支持電極2、レーザ光4を針状試料1の先端部に照射するレーザ照射手段3、位置敏感型検出器5及び電源6から構成される。
【0016】
この場合の針状試料1の先端部の直径φは例えば100nm程度であり、レーザ照射手段3としては、例えば、波長が343nmのレーザ光4を放出するフェムト秒レーザを用いる。また、針状試料1と位置敏感型検出器5との距離は例えば、10cmであり、電源6による印加電圧としては20kVとする。
【0017】
針状試料1に対して電源6により高電界を印加した状態でその先端にレーザ光4を照射してレーザ・アシスト電界蒸発により最表面の原子を順次イオン化して表面から離脱させる。離脱した原子を、原子層毎に位置敏感型検出器5により順次検出し、飛行時間により原子の質量を計測して、各原子層毎の面内データを取得する。
【0018】
図2は本発明の実施の形態の3次元アトムプローブ構造データ解析方法のフローチャートである。まず、
ステップ1:3DAP装置により原子層単位の面内データを取得する。
ステップ2:各面内データにおいて、同種原子間の原子間距離を算出して、最近接原子間距離の平均値r0を求める。
ステップ3:検出した原子を中心として半径r0の円をそれぞれ描画し、複数の円が交わるか、または接する位置x(r0≦x<2r0)にある空領域に同種の原子を補完する( 一次補完) 。
ステップ4:必要に応じて、補完した原子も加えた新たな原子層データから、再度の補完が必要か否かを判定する。必要と判断した場合には、ステップ3に戻って補完(二次補完)を行う。なお、必要か否かは経験則によるものであり、通常は三次補完は行わずに二回の補完で終了する。
ステップ5:被分析対象が化合物の場合、補完を行っていない他の原子に対してもステップ3及びステップ4の補完を行う。
ステップ6:原子層における全ての種類の原子について補完が行われたか否かを判定し、行われた場合にはステップ7に進む。
ステップ7:全ての原子層について補完が行われたか否かを判定し、行われた場合にはステップ8に進む。
ステップ8:補完した各原子層毎のデータを基にして3次元構造を再構築する。
ステップ9:3次元構造におけるZ方向の原子配列を解析する。
ステップ10:XY面内の相対的位置ずれがあるか否かを判定し、ずれがない場合には工程を終了し、ずれがある場合にはステップ11に進む。
ステップ11:XY面内の相対的位置をシフトさせて最終的な3次元構造を再構築する。
【0019】
なお、補完に際しては、最近接原子位置半径r0の誤差範囲を設定して補完位置検索を行う。例えば、誤差範囲は半径r0の±5%の範囲とする。また、誤差が大きく原子位置が重なる場合には、周期性を考慮してその位置の原子を決める。以上の各ステップは、プログラムにより自動的に行う。
【0020】
このように、本発明の3次元アトムプローブ構造データ解析方法は、予め結晶構造を把握しておく必要がない簡単な補完法であるので、構造データ解析を迅速に行うことができる。特に、各原子層毎での補完、即ち、XY方向の2次元面内での補完が中心であるので、処理が複雑で大きなリソースが要求されることなく構造データ解析を効率良く行うことができる。
【0021】
また、非晶質でもある程度対応できる。即ち、非晶質といってもミクロな構造としてはある程度規則的な構造を有しており、また、マクロな構造としては配向性を有している場合があるので、このような場合には対応できることになる。
【0022】
また、原子欠損(空孔)や不純物原子にも対応可能である。即ち、不純物原子の配置は統計的には不純物濃度に規定される均一な分布であるので、面内濃度に基づいて欠落している不純物原子を平均的に補完することができる。なお、空孔の場合には試料の密度を測定して空孔濃度を測定し、あとは不純物原子を同様の扱いとする。
【実施例1】
【0023】
以上を前提として、次に、図3乃至図11を参照して本発明の実施例1の3次元アトムプローブ構造データ解析方法を説明する。図3は本発明の実施例1の3次元アトムプローブ構造データ解析方法に用いた試料の概念的断面図である。まず、(001)面を主面とするMgO単結晶基板11上に、高温スパッタ法により厚さが、例えば、10nmのSrRuO3薄膜12、厚さが、例えば、15nmのBaTiO3薄膜13、厚さが、例えば、10nmのSrRuO3薄膜14を順次成膜する。次いで、室温において、厚さが、例えば、30nmのTa膜15を成膜して保護膜(キャップ層)とした試料を作製する。
【0024】
次いで、3DAP分析を行うために、試料をデュアルビームFIB(収束イオンビーム)法によって尖端径φ80nm、長さ100nmに加工して分析用試料10とする。作製した分析用試料10を図1に示したレーザ・アシスト3DAP装置により分析して各原子種及び位置情報データを取得する。この原子種及び位置情報データにより構造を再構築したものが従来の3次元構造である。
【0025】
次いで、取得した生データに対し、Z方向の原子レベル空間分解能を利用して1原子層単位に面分割する。その際に、保護膜となるTa膜15は除外し、基板のMgOは例えば、5nmのみを対象とする。図4は、このようにして取得したZ方向における各原子層毎の原子配置のイメージ図であり、実際には、各原子層において本来存在するはずの原子が40%〜50%程度欠けた状態となっている。なお、図4は、BaTiO3薄膜13の原子配置を例に示している。
【0026】
次いで、図5に示すように、始めにMgO層を選び、XY面内に分布しているMg原子から別のMg原子に対して、それぞれの最近接原子間距離を求め、その平均値をr0とする。次いで、それぞれのMg原子からそれを中心として半径r0の仮想的な円を描き、その円周上で別のMg原子の仮想円と接するかまたは交わる点の位置座標を求める。
【0027】
次いで、図6に示すように、その位置に原子が存在しない場合には原子欠損位置と判断して、Mg原子をその位置に補完する。補完に際しては、r0を±5 %の範囲で緩和して行った。なお、誤差設定は、補完後の構造を確認しながら設定することが望ましい。次いで、図7に示すように、同様のプロセスを同一面内に存在するO原子に対しても行う。
【0028】
次いで、同じプロセスを別の原子面に対しても行う。5nmのMgO層の全ての原子面に対して原子補完を行った後、全体の層構造がそれぞれ結晶性と判断できたので、次に、3次元構造におけるZ方向の原子配列を解析する。図8に示すように、Z軸方向に対して、基準とする任意の一原子面、例えば、A1層を選択し、その原子面内に存在するそれぞれの原子を基準点としてZ軸方向に重なる他の原子面にある基準点の上方または下方に存在する同種の原子に対して最小二乗法による直線近似を行い、最終的にXY座標を補正する。
【0029】
同様のプロセス・フローをSrRuO3薄膜12、BaTiO3 薄膜13及びSrRuO3薄膜14に対しても行い、それぞれ再構築された層をZ座標を基に3次元的に再構築する。
【0030】
例えば、図9及び図10は図4に示したBaTiO3薄膜13の原子補完工程の説明図である。まず、図9に示すようにTi原子とO原子で構成されA層についてTi原子とO原子の補完を行う。次いで、図10に示すようにBa原子とO原子で構成されB層についてBa原子とO原子の補完を行う。
【0031】
BaTiO3薄膜13の全ての原子面に対して原子補完を行った後、全体の層構造がそれぞれ結晶性と判断できたので、次に、3次元構造におけるZ方向の原子配列を解析する。図11に示すように、Z軸方向に対して、基準とする任意の一原子面、例えば、A1層を選択し、その原子面内に存在するそれぞれの原子を基準点としてZ方向に重なる他の原子面にある基準点の上方または下方に存在する同種の原子に対して最小二乗法による直線近似を行い、最終的にXY座標を補正する。次いで、SrRuO3薄膜12、14についても、Sr原子、Ru原子、O原子に対して同様の原子補完を行う。
【0032】
以上のプロセス・フローにより、欠落している原子を補完し、本来の試料が有している構造に近い仮想的な微細構造を再現することができる。
【0033】
このように、本発明の実施例1においては、各原子層毎での補完、即ち、XY方向の2次元面内での補完が中心のデータベースを必要としない簡単な補完法であるので、処理が複雑で大きなリソースが要求されることなく構造データ解析を効率良く行うことができる。
【0034】
以上、本発明の実施例1を説明したが、本発明は実施例1で説明した構成に限られるものではない。例えば、実施例1においてはレーザ・アシスト電界蒸発を用いているが、レーザ照射は必須ではなく、高電界のみで電界蒸発させても良いものである。
【符号の説明】
【0035】
1 針状試料
2 支持電極
3 レーザ照射手段
4 レーザ光
5 位置敏感型検出器
6 電源
10 分析用試料
11 MgO単結晶基板
12 SrRuO3薄膜
13 BaTiO3薄膜
14 SrRuO3薄膜
15 Ta膜
【特許請求の範囲】
【請求項1】
3次元アトムプローブ装置を用いて取得した試料の原子レベル微細構造データにおいて、前記原子レベル微細構造データにおける原子間距離に基づいて、参照データなしに実際の試料の微細構造から欠落している原子の位置を求め、前記位置に前記原子を補完する3次元アトムプローブ構造データ解析方法。
【請求項2】
前記補完する工程が、前記取得した原子レベル微細構造データを前記3次元アトムプローブ装置を構成する位置敏感型検出器の法線方向に1原子層毎に分解し、前記分解した各原子層の面内において同種の欠落原子を補完する工程である請求項1に記載の3次元アトムプローブ構造データ解析方法。
【請求項3】
前記分解した各原子層の面内において同種の欠落原子を補完する工程が、前記各原子層の面内の同種原子について、それぞれ最近接原子間距離を求め、その平均値r0 を算出する工程と、前記算出した平均値r0 を半径とした円を各原子を中心として描画し、その円周が接するか或いは交わる位置を探索する工程と、前記円周が接するか或いは交わる位置に同種の原子が存在しない場合に、原子欠落位置と判断して、前記原子欠落位置に原子を補完する工程とを有する請求項2に記載の3次元アトムプローブ構造データ解析方法。
【請求項4】
前記分解した各原子層の面内において、前記補完した原子と別の種類の原子が存在する場合に、前記別の種類の原子に対しても請求項3に記載の欠落原子の補完工程による補完を行う3次元アトムプローブ構造データ解析方法。
【請求項5】
前記平均値r0 に対して予め定めた誤差範囲を指定して補完を行う請求項3または請求項4に記載の3次元アトムプローブ構造データ解析方法。
【請求項6】
前記分解した原子層の全ての面内における欠落原子の補完を行った後、3次元構造を再構成し、前記3次元構造が結晶性であると判定した場合に、同種元素について前記位置敏感型検出器の法線方向で最小二乗法により直線近似を行って前記法線方向の相対的な位置合せを行い、3次元構造を再構築する工程を有する請求項1乃至請求項5のいずれか1項に記載の3次元アトムプローブ構造データ解析方法。
【請求項1】
3次元アトムプローブ装置を用いて取得した試料の原子レベル微細構造データにおいて、前記原子レベル微細構造データにおける原子間距離に基づいて、参照データなしに実際の試料の微細構造から欠落している原子の位置を求め、前記位置に前記原子を補完する3次元アトムプローブ構造データ解析方法。
【請求項2】
前記補完する工程が、前記取得した原子レベル微細構造データを前記3次元アトムプローブ装置を構成する位置敏感型検出器の法線方向に1原子層毎に分解し、前記分解した各原子層の面内において同種の欠落原子を補完する工程である請求項1に記載の3次元アトムプローブ構造データ解析方法。
【請求項3】
前記分解した各原子層の面内において同種の欠落原子を補完する工程が、前記各原子層の面内の同種原子について、それぞれ最近接原子間距離を求め、その平均値r0 を算出する工程と、前記算出した平均値r0 を半径とした円を各原子を中心として描画し、その円周が接するか或いは交わる位置を探索する工程と、前記円周が接するか或いは交わる位置に同種の原子が存在しない場合に、原子欠落位置と判断して、前記原子欠落位置に原子を補完する工程とを有する請求項2に記載の3次元アトムプローブ構造データ解析方法。
【請求項4】
前記分解した各原子層の面内において、前記補完した原子と別の種類の原子が存在する場合に、前記別の種類の原子に対しても請求項3に記載の欠落原子の補完工程による補完を行う3次元アトムプローブ構造データ解析方法。
【請求項5】
前記平均値r0 に対して予め定めた誤差範囲を指定して補完を行う請求項3または請求項4に記載の3次元アトムプローブ構造データ解析方法。
【請求項6】
前記分解した原子層の全ての面内における欠落原子の補完を行った後、3次元構造を再構成し、前記3次元構造が結晶性であると判定した場合に、同種元素について前記位置敏感型検出器の法線方向で最小二乗法により直線近似を行って前記法線方向の相対的な位置合せを行い、3次元構造を再構築する工程を有する請求項1乃至請求項5のいずれか1項に記載の3次元アトムプローブ構造データ解析方法。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−243458(P2010−243458A)
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願番号】特願2009−95451(P2009−95451)
【出願日】平成21年4月10日(2009.4.10)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願日】平成21年4月10日(2009.4.10)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]