
3次元ルーフ構造を出力するナビゲーションデバイスおよび方法、並びにデータベースを生成する方法
【課題】3次元構造を生成するためのデータを格納するデータベースを含むナビゲーションデバイス、3次元構造を出力する方法、およびデータベースを生成する方法を提供する。
【解決手段】ナビゲーションデバイス1は、光学出力デバイス4と、3次元ルーフ構造を規定するデータを格納する記憶デバイス3と、記憶デバイス3に連結された処理デバイス2とを含む。処理デバイス2は、記憶デバイス3から3次元ルーフ構造を規定するデータを検索することと、検索されたデータに基づいて3次元ルーフ構造を再現することと、再現されたルーフ構造を表示するように光学出力デバイス4を制御することとを行うように構成されている。検索されたデータは、少なくとも1つの閉多角形のエッジと、エッジの各々に対してデータベースにそれぞれに格納されたタイプ識別子とについての情報を含む。
【解決手段】ナビゲーションデバイス1は、光学出力デバイス4と、3次元ルーフ構造を規定するデータを格納する記憶デバイス3と、記憶デバイス3に連結された処理デバイス2とを含む。処理デバイス2は、記憶デバイス3から3次元ルーフ構造を規定するデータを検索することと、検索されたデータに基づいて3次元ルーフ構造を再現することと、再現されたルーフ構造を表示するように光学出力デバイス4を制御することとを行うように構成されている。検索されたデータは、少なくとも1つの閉多角形のエッジと、エッジの各々に対してデータベースにそれぞれに格納されたタイプ識別子とについての情報を含む。
【発明の詳細な説明】
【技術分野】
【0001】
(技術分野)
本発明は、3次元構造を生成するためのデータを格納するデータベースを含むナビゲーションデバイス、3次元構造を出力する方法、およびデータベースを生成する方法に関する。本発明は、特に、3次元ルーフ構造が、データベースに格納されているデータを用いて出力され得るようなデバイスおよび方法に関する。
【背景技術】
【0002】
(背景)
光学出力デバイスは、ナビゲーションデバイスに広く使用されている。このような出力デバイスは、電子マップを出力するために使用され得る。電子マップは、汎用かつコンパクトの利点を有する、小さくて、かつ/または携帯型のデバイスの画面上に表示され得る。電子マップ上に表示されたデータは、例えば、表示されたマップ部分の大きさを変化させることによって、ユーザーにとって関連性があり得る追加の物体、例えば、ナビゲーションデバイスにおいて方向変換を示す方向の矢印を表示することによって、またはユーザーにとって関連性があり得る物体をハイライトすることによって、容易に変更され得、そして適合され得る。
【0003】
3次元マップは、それらの高認識品質のために、ユーザーにとって特に価値があり得る。すなわち、従来の2次元表示と比較されると、3次元マップが出力される場合に、街道の交差点のような環境範囲の認識が容易にされ得る。ビルディングが、ユーザーに出力された3次元マップまたは都市モデル内に含まれ得る。高認識品質を得るために、ルーフ構造もこのようなマップにおいて表示され得ることが望ましい。
【0004】
幅広い種類のルーフ形状が存在するために、ひどく高くであり得る大量の記憶スペースを必要とせず、ルーフの3次元表示についての情報を格納するデータベースを提供することがかなりの挑戦である。1つのアプローチにおいて、ルーフ構造は、平面の表面上に設置されているm組のポイント(ここで、m≧3)としてデータベースに格納されている各表面を有する1集合の平面の表面として表され得る。このアプローチにおいて、大きなデータ量が、ルーフ構造を表すために必要とされ得る。さらに、このアプローチは、隣接する平面の表面の間のミスマッチのために、データから3Dモデルを生成するときに、人工ギャップまたは他の人工物になりやすい場合もある。
【0005】
別のアプローチにおいては、パラメータ表示が、使用され得、ルーフタイプのライブラリに基づく。この場合において、ルーフタイプを識別する1つのタイプ識別子と、さまざまな寸法を規定する1つ以上のパラメータ値とが格納され得る。複数の可能なルーフタイプのうちの1つが識別子によって規定されるこのアプローチが、適度の記憶スペースの要求を用いて実装され得るが、そのアプローチは、減少された柔軟性から悪くなる。ルーフライブラリは、概して、少なくともルーフのベース表面が、正多角形、例えば、長方形である仮定に基づく。より複雑なビルディング輪郭に対してルーフ構造についての情報を格納し、または例えば、ライブラリに規定されるルーフ基本形がないドーマーに対していくつかのルーフ特徴を収容することは、挑戦であり得、また不可能でもあり得る。
【0006】
なお別のアプローチにおいて、上に概要を述べられた2つのアプローチが、互いに組み合わせられ得る。それらのコーナーポイントによるルーフ面の定義は、ルーフライブラリに基づく説明に加えられ得る。それによって、ルーフライブラリの基本形のうちの1つに対応しないルーフ構造もデータベースによって記述され得るのにかかわらず、処理が複雑になり得、記憶スペースの要求が再び大きくなり得る。
【発明の概要】
【発明が解決しようとする課題】
【0007】
(要約)
従って、幅広い種類のルーフ形状を記述するのに柔軟性を提供するナビゲーションデバイスおよび方法に対するニーズがある。また、ルーフ構造がコンパクトの方式で規定されることを可能にし、そして光学出力を生成するときに人工物のリスクを減少させるようなデバイスおよび方法に対するニーズがある。
【0008】
このニーズは、独立請求項において記載されるようなデバイスおよび方法によって的にされる。従属請求項は、実施形態を規定する。
【課題を解決するための手段】
【0009】
一局面に従って、ナビゲーションデバイスが提供される。ナビゲーションデバイスは、光学出力デバイスと、データベースと、処理デバイスとを含む。データベースは、3次元ルーフ構造を規定するデータを格納する。処理デバイスは、データベースに連結されており、データベースから3次元ルーフ構造を規定するデータを検索することと、検索されたデータに基づいて3次元ルーフ構造を再現することと、再現されたルーフ構造を表示するように光学出力デバイスを制御することとを行うように構成されている。検索されたデータは、少なくとも1つの閉多角形のエッジと、エッジの各々に対してデータベースにそれぞれに格納されたタイプ識別子とについての情報を含む。検索されたデータは、少なくとも1つの閉多角形のエッジと、エッジの各々に対してデータベースにそれぞれに格納されたタイプ識別子とについての情報を含む。タイプ識別子の各々は、それぞれ、タイプ識別子の有限集合から選択される。3次元ルーフ構造を再現するために、処理デバイスは、複数の平面を決定するように構成されている。平面が、それぞれ、多角形のエッジを通過し、エッジに対して格納されたタイプ識別子に基づいて決定された向きを有するように、複数の平面が決定される。
【0010】
ナビゲーションデバイスは、さまざまなフートプリントを有するルーフを記述するのにおいて高い柔軟性を提供する。方法は、ルーフ構造の面の全コーナーポイントがデータベースに指定され、そして格納されることを必要としない。
【0011】
タイプ識別子が、全体としてルーフ構造に割り当てられるではなく、むしろ多角形の個々のエッジにそれぞれに割り当てられるように、ルーフ構造についての情報が格納される。それによって、柔軟性が増強される。ルーフ構造を規定するために、データベースに格納された情報は、タイプ識別子である意味でパラメータ的であり、それぞれのタイプ識別子に依存して、パラメータ値が、多角形のエッジに割り当てられる。ルーフ構造の面の全コーナーポイントの座標を格納する必要がない。それによって、記憶スペースの要求が適度に保たれ得る。
【0012】
タイプ識別子の有限集合は、少なくとも、上行のルーフ面に対する第1のタイプ識別子と、ベース平面に垂直に方向を決められている平面に対する第2のタイプ識別子とを含み得る。
【0013】
有限集合に含まれた異なるタイプ識別子の数は、多角形のエッジの数より少なくあり得る。
【0014】
このようなタイプ識別子は、平面の向きを決定するために必要とされる全部の情報を含み得、ただしそれらを必ず含む必要がない。例示として、それぞれのエッジから上向きに延在するルーフ面を表す1つのタイプ識別子であり得る。傾斜角は、別個のパラメータ値としてデータベースに格納され得る。別のタイプ識別子は、エッジがベース平面に対して垂直である壁面にわたって延在することを示し得る。なお、別のタイプ識別子は、多角形が規定されているベース平面内に、それぞれのエッジから多角形の内部に向かって延在する平らなルーフを示し得る。
【0015】
データベースに格納され、データベースから検索された多角形のエッジについての情報は、少なくとも、エッジの向きおよびエッジの長さについての情報を含み得る。この情報が、さまざまな形式で提供され得る。例えば、多角形の頂点の座標がデータベースに格納され得る。多角形のエッジについての情報は、多角形のコーナーポイントの座標を含み得る。代替的には、多角形のエッジについての情報は、多角形の少なくとも1つのポイントの座標と、エッジベクトルについての情報とを含み得る。
【0016】
処理デバイスは、ルーフ構造を再現するために、多角形の異なるエッジを通過する異なる平面の間の交差線を計算するように構成され得る。ルーフ面の全コーナーポイントの手動の定義から生じ得る人工物の問題が軽減され得る。さらに、リッジ線上のポイントの座標がデータベースに格納されることを必要とせず、ルーフ構造のリッジ線が計算され得る。
【0017】
処理デバイスは、再現されたルーフ構造の平面の下端においてそれらの平面の境界を定める線を計算するように構成され得る。この目的のために、処理デバイスは、ビルディングの輪郭についての情報を検索し得る。ビルディングの輪郭は、x−y平面、すなわち、ベース平面内に、多角形に対して生成された全部の平面の下端においてそれらの平面を制限するために使用され得る。
【0018】
検索されたデータは、少なくともエッジの一部に対するパラメータ値を含み得る。パラメータ値の各々は、それぞれ、多角形のエッジのうちの1つに対してデータベースに格納され得る。処理デバイスは、パラメータ値に基づいてルーフ構造を再現するように構成され得る。エッジが、1つのタイプ識別子を有し、ただし、エッジが別のタイプ識別子を有しない場合に、パラメータ値が、選択的に格納され、そしてルーフ構造を再現するために、処理デバイスによって使用され得る。例示として、垂直の壁面が多角形のエッジから上向きに延在することを示すタイプ識別子に対して、それぞれのエッジに対してパラメータ値を格納する必要がない場合もある。傾斜のルーフ面がそれぞれのエッジから上向きに延在することを示すタイプ識別子に対して、傾斜パラメータ値が、傾斜を定量化するために格納され得る。
【0019】
処理デバイスは、エッジに対して格納されたタイプ識別子に基づいて、それぞれのエッジから延在する平面の表面テクスチャーを選択するように構成され得る。これは、壁面が傾斜のルーフ面と異なるテクスチャーであることを可能にする。
【0020】
処理デバイスは、第1のタイプ識別子がデータベースに格納されている多角形のエッジを識別することと、識別されたエッジに対して少なくとも1つの傾斜パラメータ値を検索することと、平面を有する傾斜のルーフ面を生成することとを行うように構成され得る。平面が、識別されたエッジを通過し、かつ傾斜パラメータ値によって規定された傾斜を有するように、傾斜のルーフ面が生成され得る。それによって、傾斜のルーフ面は、第1のタイプ識別子および傾斜角を示すパラメータ値との組み合わせで、多角形のエッジについての情報、特にエッジの向きについての情報を用いて生成され得る。
【0021】
処理デバイスは、第1のタイプ識別子を有するエッジを通過する平面と、多角形の他のエッジを通過する他の平面との間の交差線を計算することによって、傾斜のルーフ面の側を計算するように構成され得る。処理デバイスは、第1のタイプ識別子を有するエッジを通過する平面と、多角形の隣接するエッジを通過する他の平面との間の交差線を計算することによって、傾斜のルーフ面の側を計算するように構成され得る。
【0022】
処理デバイスは、第1のタイプ識別子がデータベースに格納されている多角形の第2のエッジを識別することと、識別された第2のエッジに対して第2の傾斜パラメータ値を検索することと、ルーフ面と第2のルーフ面との間の交差線を計算することとを行うように構成され得る。第2のルーフ面は、第2のエッジを通過し、かつ第2の傾斜パラメータ値によって規定された傾斜を有する第2の平面を含み得る。この方式において、ルーフ構造のリッジ線が計算され得る。データベースにリッジ線上のポイントの座標を格納する必要がない。
【0023】
処理デバイスは、さらなる傾斜パラメータ値が識別されたエッジに対して格納されるか否かを決定するように構成され得る。さらなる傾斜パラメータ値が識別されたエッジに対して格納されている場合に、ルーフ面が、さらなる平面を有する折れ曲がったルーフ面として生成され得る。さらなる平面は、エッジに平行し、かつさらなる傾斜パラメータ値によって規定されたさらなる傾斜を有する。異なる傾斜を有する2つの平面の間のエッジの場所を特定する少なくとも1つの相対位置パラメータ値が、データベースに格納され得る。傾斜パラメータ値と、相対位置パラメータ値とを用いて、平面の間のエッジの位置が決定され得る。
【0024】
処理デバイスは、多角形のエッジを識別するように構成され得、第1のタイプ識別子が、エッジに対して格納され、エッジの長さは、0である。次に、処理デバイスは、ルーフ構造のベース平面に対して傾斜されており、多角形の前のエッジに直交に向きを決定された下端を有するルーフ面を生成し得る。この方法において長さが0であるエッジを処理することによって、追加のタイプ識別子が規定されることを必要とせず、ドーマーが再現され得る。
【0025】
処理デバイスは、第2のタイプ識別子がデータベースに格納されている多角形のエッジを識別することと、ルーフ構造が、ベース平面に垂直に方向を決められている平面を含み、識別されたエッジを通過し、そしてベース平面に対して傾斜された上行の壁エッジを有するように、ルーフ構造を再現することとを行うように構成され得る。それによって、傾斜のルーフ面を支持する壁面が出力され得る。処理デバイスは、傾斜のルーフ面に適用された表面テクスチャーと異なる表面テクスチャーを壁面に適用し得る。
【0026】
処理デバイスは、上行の壁エッジを計算するために、平面とさらなる平面との間の交差線を計算するように構成され得る。平面は、第2のタイプ識別子が割り当てられている識別されたエッジを通過し、かつベース平面に垂直である。さらなる平面は、識別されたエッジに隣接する多角形の別のエッジを通過し、かつベース平面に対して傾斜されている。それによって、上行の壁エッジが決定され得る。
【0027】
処理デバイスは、第3のタイプ識別子がデータベースに格納されている多角形のエッジを識別することと、ルーフ構造が、多角形の識別されたエッジによって囲まれた平らなルーフを含むようにルーフ構造を再現することとを行うように構成され得る。それによって、平らなルーフが、3次元マップに表示され得る。多角形のエッジに割り当てられた第3のタイプ識別子との組み合わせで、平らなルーフを規定するように多角形を用いることによって、幅広い種類の平らなルーフの形状が考慮に入れられ得る。処理デバイスは、傾斜のルーフ面または壁面に適用された表面テクスチャーと異なる表面テクスチャーを平らなルーフに適用し得る。
【0028】
タイプ識別子の有限集合は、3つ以下の異なるタイプ識別子を含み得る。例示として、ルーフ構造のベース平面の多角形の各エッジに対して、データベースに格納されたタイプ識別子は、第1のタイプ識別子、第2のタイプ識別子および第3のタイプ識別子からなる集合から選択され得る。2つまたは3つのタイプ識別子を用いることによって、なお大量のルーフ構造が格納され得、かつ表示され得る。データは、このような限定された数のタイプ識別子に対する一般的な処理ステップを用いて処理され得る。
【0029】
多角形は、ルーフ構造のベース平面、すなわち、フート平面に配置され得る。
【0030】
データベースは、関係型のデータベースであり得る。少なくとも、多角形のエッジに割り当てられたタイプ識別子は、関係型のデータベースの属性として格納され得る。
【0031】
データベースは、ナビゲーションデータ基準(NDS)に従うマップデータベースであり得る。
【0032】
ナビゲーションデバイスは、車両ナビゲーションデバイスであり得る。車両ナビゲーションデバイスは、車両内に取り外し可能に、または固定して設置され得る。
【0033】
ナビゲーションデバイスの光学出力デバイスを介して3次元ルーフ構造を出力する方法が提供される。3次元ルーフ構造を表すデータが、データベースから検索される。検索されたデータは、少なくとも1つの閉多角形のエッジと、エッジの各々に対してデータベースにそれぞれに格納されたタイプ識別子とについての情報を含む。タイプ識別子の各々が、タイプ識別子の有限集合から選択される。3次元ルーフ構造は、エッジと、エッジに対するタイプ識別子とについての情報に基づいて再現される。再現のために、複数の平面が決定されており、それにより、平面は、それぞれ、多角形のエッジを通過し、かつエッジに対して格納されたタイプ識別子に基づいて決定された向きを有する。光学出力デバイスは、再現されたルーフ構造を表示するように制御される。
【0034】
方法は、さまざまなフートエリアを有するルーフを記述するのにおいて高い柔軟性を提供する。方法は、面のすべてのコーナーポイントがデータベースに特定され、かつ格納されることを必要としない。
【0035】
タイプ識別子の有限集合は、少なくとも、上行のルーフ面に対する第1のタイプ識別子と、ベース平面に垂直に方向を決められている平面に対する第2のタイプ識別子とを含み得る。
【0036】
有限集合に含まれた異なるタイプ識別子の数は、多角形のエッジの数より少なくあり得る。
【0037】
検索されたデータは、少なくともエッジの一部に対するパラメータ値を含み得る。パラメータ値の各々は、それぞれ、多角形のエッジのうちの1つに関連付けられて格納され得る。ルーフ構造を再現することは、さらにパラメータ値に基づいて行われ得る。
【0038】
ルーフ構造を再現するときに、第1のタイプ識別子がデータベースに格納される多角形のエッジが識別され得る。識別されたエッジに対する少なくとも1つの傾斜パラメータ値が検索され得る。平面を有する傾斜のルーフ面が形成され得、それにより、平面は、識別されたエッジを通過し、傾斜パラメータ値によって規定された傾斜を有する。
【0039】
第1のタイプ識別子がデータベースに格納されている多角形の第2のエッジが識別され得る。識別された第2のエッジに対して格納された第2の傾斜パラメータ値が検索され得る。ルーフ面と第2のルーフ面との間の交差線が計算され得る。第2のルーフ面は、第2のエッジを通過し、かつ第2の傾斜パラメータ値によって規定された傾斜を有する第2の平面を含み得る。
【0040】
ルーフ構造を再現することは、さらなる傾斜パラメータ値が識別されたエッジに対して格納されるか否かを決定することを含み得る。さらなる傾斜パラメータ値が識別されたエッジに対して格納されている場合に、ルーフ面が、さらなる平面を有する折れ曲がったルーフ面として生成され得る。さらなる平面は、多角形のエッジに平行し、かつ少なくとも1つのさらなる傾斜パラメータ値によって規定されたさらなる傾斜を有し得る。
【0041】
ルーフ構造を再現することは、第2のタイプ識別子がデータベースに格納されている多角形のエッジを識別することを含み得る。ルーフ構造が、それが、ベース平面に垂直に方向を決められている平面を含み、識別されたエッジを通過し、そしてベース平面に対して傾斜された上行の壁エッジを有するように再現され得る。
【0042】
ルーフ構造を再現することは、上行の壁エッジを計算するために、平面とさらなる平面との間の交差線を計算するように構成され得る。平面は、第2のタイプ識別子が割り当てられている識別されたエッジを通過し、かつベース平面に垂直である。さらなる平面は、識別されたエッジに隣接する多角形の別のエッジを通過し、かつベース平面に対して傾斜されている。
【0043】
ルーフ構造を再現することは、上行の壁エッジを計算するために、平面とさらなる平面との間の交差線を計算することを含み得る。ここで、平面は、識別されたエッジを通過し、かつベース平面に垂直であり、さらなる平面は、識別されたエッジに隣接する多角形の別のエッジを通過し、かつベース平面に対して傾斜されている。
【0044】
ルーフ構造を再現することは、第3のタイプ識別子がデータベースに格納されている多角形のエッジを識別することを含み得る。ルーフ構造が、それが多角形の識別されたエッジによって囲まれた平らなルーフを含むよう再現され得る。
【0045】
タイプ識別子の有限集合は、3つ以下の異なるタイプ識別子を含み得る。
【0046】
多角形は、ルーフ構造のベース平面に配置され得る。
【0047】
データベースは、関係型のデータベースであり得る。
【0048】
任意の局面または実施形態に従う、3次元ルーフ構造を出力する方法は、任意の局面または実施形態のナビゲーションデバイスを用いて行われ得る。
【0049】
別の局面に従って、ナビゲーションデータベースを生成する方法が提供される。ナビゲーションデータベースは、それがルーフ構造のパラメータ記述を含むように生成される。3次元ルーフ構造を表すデータが、検索される。データに基づいて、ルーフ構造のベース平面の複数のエッジを含む少なくとも1つの閉多角形が識別される。複数のエッジの各エッジに対して、ルーフ構造のルーフ面に対するエッジの位置に基づいて、タイプ識別子の有限集合から選択されたタイプ識別子が、エッジに割り当てられる。割り当てられたタイプ識別子に基づいて、データから、それぞれのエッジに対してパラメータ値が、選択的に決定され得る。多角形のエッジと、エッジの各々に割り当てられたタイプ識別子とについての情報が、データベースに格納される。
【0050】
この方法を用いて、3次元ルーフ構造を再現し、かつ出力するための情報を含むデータベースが、生成され得る。ルーフ面のすべてのコーナーポイントをデータベースに格納することが必要とされない。むしろ、ルーフ面のパラメータ記述が使用される。タイプ識別子が、全体としてルーフ構造に割り当てられるではなく、むしろ多角形の個々のエッジに割り当てられ、これは、幅広い種類のルーフ構造が格納されることを可能にする。
【0051】
タイプ識別子の集合は、第1のタイプ識別子と、第2のタイプ識別子と、第3のタイプ識別子とを含み得る。エッジが傾斜のルーフ面の下端側に沿って延在する場合に、第1のタイプ識別子が、多角形のエッジに割り当てられ得る。エッジが、ルーフ面を支持するための上行の壁エッジを有する壁面にわたって延在する場合に、第2のタイプ識別子が、多角形のエッジに割り当てられ得る。エッジが平らなルーフ面の側に沿って延在する場合に、第3のタイプ識別子が、多角形のエッジに割り当てられ得る。
【0052】
局面および実施形態が、ナビゲーションデバイスの文脈で説明されているが、さらなる局面および実施形態に従って、方法およびデバイスは、また他のアプリケーションにおいて3次元ルーフ構造を出力するために使用され得る。例示として、方法およびデバイスは、3次元都市モデルが出力されるべきである任意の電子デバイスまたはアプリケーションの光学出力デバイスを介して3次元ルーフ構造を再現し、かつ出力するように使用され得る。
【0053】
前述の特徴と以下に説明されるべきである特徴は、示されるそれぞれの組み合わせにおいても、他の組み合わせまたは単独においても使用され得ることが理解されるべきである。
【0054】
例えば、本発明は、以下の項目を提供する。
(項目1)
ナビゲーションデバイスであって、該ナビゲーションデバイスは、
光学出力デバイス(4)と、
3次元ルーフ構造を規定するデータ(21,22,23)を格納するデータベース(3;20)と、
該データベース(3;20)に連結された処理デバイス(2)と
を含み、
該処理デバイス(2)は、該データベース(3;20)から3次元ルーフ構造を規定するデータ(21,22,23)を検索することと、該検索されたデータ(21,22,23)に基づいて該3次元ルーフ構造を再現することと、該再現されたルーフ構造を表示するように該光学出力デバイス(4)を制御することとを行うように構成されており、
該検索されたデータ(21,22,23)は、少なくとも1つの閉多角形のエッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)の各々に対して該データベース(3;20)にそれぞれに格納されたタイプ識別子とについての情報を含み、該タイプ識別子の各々は、それぞれ、タイプ識別子の有限集合から選択され、該処理デバイス(2)は、該ルーフ構造を再現するために、複数の平面(55−57;82,84;93;103,104;113,114)を決定するように構成されており、該平面(55−57;82,84;93;103,104;113,114)の各々が該多角形のエッジ(64,65;75−78;81,83;101;111,112)を通過し、該エッジに対して格納された該タイプ識別子に基づいて決定された向きを有するように、該平面(55−57;82,84;93;103,104;113,114)の各々が、それぞれに決定される、ナビゲーションデバイス。
(項目2)
上記タイプ識別子の有限集合は、少なくとも、上行のルーフ面に対する第1のタイプ識別子と、ベース平面に垂直に方向を決められている平面に対する第2のタイプ識別子とを含む、上記項目のいずれかに記載のナビゲーションデバイス。
(項目3)
上記検索されたデータ(21,22,23)は、少なくとも上記エッジ(64,65;75−78;81,83;101;111,112)の一部に対するパラメータ値を含み、該パラメータ値の各々は、それぞれ、上記多角形の該エッジ(64,65;75−78;81,83;101;111,112)のうちの1つに関連付けられて格納されており、
上記処理デバイス(2)は、該パラメータ値に基づいて上記ルーフ構造を再現するようにさらに構成されている、上記項目のいずれかに記載のナビゲーションデバイス。
(項目4)
上記処理デバイス(2)は、上記ルーフ構造を再現するときに、第1のタイプ識別子が上記データベース(3;20)に格納されている上記多角形のエッジ(64;81,83;101;111,112)を識別することと、該識別されたエッジ(64;81,83;101;111,112)に対して少なくとも1つの傾斜パラメータ値を検索することと、平面(55;82,84;93;103;113,114)を有する傾斜のルーフ面を生成することとを行うように構成されており、該平面(55;82,84;93;103;113,114)は、該識別されたエッジ(64;81,83;101;111,112)を通過し、かつ該傾斜パラメータ値によって規定された傾斜を有する、上記項目のいずれかに記載のナビゲーションデバイス。
(項目5)
上記処理デバイス(2)は、上記第1のタイプ識別子が上記データベース(3;20)に格納されている上記多角形の第2のエッジ(83;111)を識別することと、該識別された第2のエッジ(83;111)に対して第2の傾斜パラメータ値を検索することと、上記ルーフ面と第2のルーフ面との間の交差線を計算することとを行うように構成されており、該第2のルーフ面は、該第2のエッジ(83;111)を通過し、かつ該第2の傾斜パラメータ値によって規定された傾斜を有する第2の平面(84;113)を含む、上記項目のいずれかに記載のナビゲーションデバイス。
(項目6)
上記処理デバイス(2)は、さらなる傾斜パラメータ値が上記識別されたエッジ(101;112)に対して格納されるか否かを決定することと、さらなる傾斜パラメータ値が該識別されたエッジ(101;112)に対して格納されている場合に、さらなる平面(104;105)を有する折れ曲がったルーフ面(102;114,115)として上記ルーフ面を生成することとを行うように構成されており、該さらなる平面(104;115)は、上記多角形の上記識別されたエッジ(101;112)に平行し、かつ該さらなる傾斜パラメータ値によって規定されたさらなる傾斜を有する、上記項目のいずれかに記載のナビゲーションデバイス。
(項目7)
上記処理デバイス(2)は、第2のタイプ識別子が上記データベース(3;20)に格納されている上記多角形のエッジ(65)を識別することと、上記ルーフ構造が、ベース平面(80)に垂直に方向を決められている平面(56)を含み、該識別されたエッジ(65)を通過し、そして該ベース平面に対して傾斜された上行の壁エッジ(67,69)を有するように、該ルーフ構造を再現することとを行うように構成されている、上記項目のいずれかに記載のナビゲーションデバイス。
(項目8)
上記処理デバイス(2)は、上記上行の壁エッジ(67,69)を計算するために、平面(56)とさらなる平面(55)との間の交差線を計算するように構成されており、該平面(56)は、上記識別されたエッジ(65)を通過し、かつ上記ベース平面(80)に垂直であり、該さらなる平面(55)は、該識別されたエッジ(65)に隣接する上記多角形の別のエッジ(64)を通過し、かつ該ベース平面(80)に対して傾斜されている、上記項目のいずれかに記載のナビゲーションデバイス。
(項目9)
上記処理デバイス(2)は、第3のタイプ識別子が上記データベース(3;20)に格納されている上記多角形のエッジ(75−78)を識別することと、上記ルーフ構造が、該多角形の該識別されたエッジ(75−78)によって囲まれた平らなルーフ(57)を含むように該ルーフ構造を再現することとを行うように構成されている、上記項目のいずれかに記載のナビゲーションデバイス。
(項目10)
上記タイプ識別子の有限集合は、3つ以下の異なるタイプ識別子を含む、上記項目のいずれかに記載のナビゲーションデバイス。
(項目11)
上記多角形は、上記ルーフ構造のベース平面(80)に配置されている、上記項目のいずれかに記載のナビゲーションデバイス。
(項目12)
上記データベース(3;20)は、関係型データベース(3;20)である、上記項目のいずれかに記載のナビゲーションデバイス。
(項目13)
ナビゲーションデバイス(1)の光学出力デバイス(4)を介して3次元ルーフ構造を出力する方法であって、該方法は、
データベース(3;20)から、3次元ルーフ構造を表すデータ(21,22,23)を検索することであって、該検索されたデータ(21,22,23)は、少なくとも1つの閉多角形のエッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)の各々に対して該データベース(3;20)にそれぞれに格納されたタイプ識別子とについての情報を含み、該タイプ識別子の各々が、タイプ識別子の有限集合から選択される、ことと、
該エッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)に対する該タイプ識別子とについての該情報に基づいて該3次元ルーフ構造を再現することであって、複数の平面(55−57;82,84;93;103,104;113,114)が決定されており、その結果、該それぞれの平面は、該多角形のエッジ(64,65;75−78;81,83;101;111,112)を通過し、かつ該エッジ(64,65;75−78;81,83;101;111,112)に対して格納された該タイプ識別子に基づいて決定された向きを有する、ことと、
該再現されたルーフ構造を表示するように、該光学出力デバイス(4)を制御することと
を含む、方法。
(項目14)
上記方法は、上記項目のいずれかに記載のナビゲーションデバイスによって行われる、上記項目のいずれかに記載の方法。
(項目15)
ルーフ構造のパラメータ記述を含む車両ナビゲーションデータベース(3;20)を生成する方法であって、該方法は、
3次元ルーフ構造を表すデータを検索することと、
該データに基づいて、該ルーフ構造のベース平面(80)の複数のエッジ(64,65;75−78;81,83;101;111,112)を含む少なくとも1つの閉多角形を識別することと、
該複数のエッジ(64,65;75−78;81,83;101;111,112)の各エッジに対して、
該ルーフ構造のルーフ面に対する該エッジ(64,65;75−78;81,83;101;111,112)の位置に基づいて、タイプ識別子の有限集合から選択されたタイプ識別子を該エッジ(64,65;75−78;81,83;101;111,112)に割り当てることと、
該割り当てられたタイプ識別子に基づいて、該データから、該それぞれのエッジ(64,65;75−78;81,83;101;111,112)に対してパラメータ値を選択的に決定することと
を行うことと、
該多角形の該エッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)の各々に割り当てられた該タイプ識別子とについての情報を該データベース(3;20)に格納することと
を含む、方法。
(項目16)
上記タイプ識別子の集合は、第1のタイプ識別子と、第2のタイプ識別子と、第3のタイプ識別子とを含み、
エッジ(64;81,83;101;111,112)が傾斜のルーフ面(55;82,84;93;103;113,114)の下端側に沿って延在する場合に、該第1のタイプ識別子が、上記多角形の該エッジに割り当てられ、
エッジ(65)が、上行のルーフ面(55)を支持するための上行の壁エッジ(67,69)を有する壁面(57)にわたって延在する場合に、該第2のタイプ識別子が、該多角形の該エッジ(65)に割り当てられ、
エッジ(75−78)が平らなルーフ面(57)の側に沿って延在する場合に、該第3のタイプ識別子が、該多角形の該エッジ(75−78)に割り当てられる、上記項目のいずれかに記載の方法。
【0055】
(摘要)
ナビゲーションデバイスは、3次元ルーフ構造を再現するためのデータを格納するデータベースを含む。データは、少なくとも1つの閉多角形のエッジ(64,65)と、エッジ(64,65)の各々に対してそれぞれにデータベースに格納されたタイプ識別子とについての情報を含む。タイプ識別子の各々が、タイプ識別子の有限集合からそれぞれに選択される。複数の平面(55−56)が、ルーフ構造を再現するために生成される。平面(55,56)が、多角形のエッジ(64,65)を通過し、かつエッジに対して格納されたタイプ識別子に基づいて決定された向きを有するように、平面(55,56)がそれぞれに決定される。
【0056】
実施形態の前述および他の特徴は、添付した図面に関連して読まれると、実施形態の以下のより詳細な説明からより明白になる。図面において、同様な数字は、同様な構成要素を指す。
【図面の簡単な説明】
【0057】
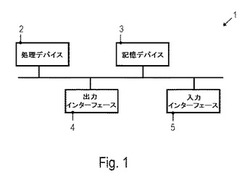
【図1】図1は、ナビゲーションデバイスの概略的ブロックダイヤグラムである。
【図2】図2は、マップデータベースの概略的表示である。
【図3】図3は、マップデータベースにおけるルーフ構造に関するデータの概略的表示である。
【図4】図4は、ルーフ構造を出力する方法のフローチャートである。
【図5】図5は、ルーフ構造を出力する方法においてルーフ構造を再現する手順のフローチャートである。
【図6】図6は、多角形のエッジに割り当てられたタイプ識別子を例示するための概略図である。
【図7】図7は、多角形のエッジに割り当てられた別のタイプ識別子を例示するための概略図である。
【図8】図8は、上行のルーフ面の生成を例示する概略図である。
【図9】図9は、上行のルーフ面の生成を例示する概略図である。
【図10】図10は、ルーフ構造の平面図である。
【図11】図11は、図10のルーフ構造のパラメータ記述を有するデータを例示する。
【図12】図12は、ルーフ構造の平面図である。
【図13】図13は、図12のルーフ構造のパラメータ記述を有するデータを例示する。
【図14】図14は、ルーフ構造の平面図である。
【図15】図15は、図14のルーフ構造のパラメータ記述を有するデータを例示する。
【図16】図16は、ルーフ構造の平面図である。
【図17】図17は、図16のルーフ構造のパラメータ記述を有するデータを例示する。
【図18】図18は、図16のルーフ構造の従来の記述を有するデータを例示する。
【図19】図19は、再現されたルーフ構造の概略的透視図である。
【図20】図20は、図19のルーフ構造の正面図である。
【図21】図21は、複数の平面を有する折れ曲がったルーフ面を例示する概略的透視図である。
【図22】図22は、図21の折れ曲がったルーフ面の側面図である。
【図23】図23は、折れ曲がったルーフ面を含む再現されたルーフ構造の概略的透視図である。
【図24】図24は、図23のルーフ構造のパラメータ記述を示す。
【図25】図25は、折れ曲がったルーフ面を有する別の再現されたルーフ構造の概略的透視図である。
【図26】図26は、図25のルーフ構造の平面図である。
【図27】図27は、図25および26のルーフ構造のパラメータ記述を有するデータを例示する。
【図28】図28は、オニオンドームのルーフ構造の平面図である。
【図29】図29は、図28のオニオンドームのルーフ構造を通す垂直の平面に沿ってとられた断面図である。
【図30】図30は、図28および29のルーフ構造のパラメータ記述を有するデータを例示する。
【図31】図31は、ナビゲーションデバイスデータベースを生成する方法のフローチャートである。
【発明を実施するための形態】
【0058】
図1は、実施形態に従うナビゲーションデバイス1を概略的に例示する。ナビゲーションデバイス1は、ナビゲーションデバイス1の動作を制御する処理デバイス2を含む。処理デバイス2は、例えば、1つ以上のマイクロプロセッサの形の中央処理ユニット、デジタル信号プロセッサ、または特定用途の集積回路を含み得る。処理デバイス2はまた、グラフィックプロセッサを含み得る。ナビゲーションデバイス1はさらに、記憶デバイス3に格納されているマップデータベースを含む。記憶デバイス3は、ランダムアクセスメモリ、フラッシュメモリまたはハードドライブのようなさまざまなタイプのメモリのうちの1つ、または任意の組み合わせを含み、またコンパクトディスク(CD)、DVD、メモリカード等のような取り外し可能なメモリも含み得る。ナビゲーションデバイス1はまた、情報をユーザーに出力するための出力インターフェース4を含む。出力インターフェース4は、光学出力デバイスを含む。ナビゲーションデバイス1はまた、入力インターフェース5を含み得る。
【0059】
ナビゲーションデバイス1は、位置センサーおよび/またはワイヤレス受信器および/または車両インターフェースのような追加の部品を含み得る。位置センサーは、ナビゲーションデバイス1が設置されている車両の現在の位置を決定するように適合され得る。位置センサーは、GPS(登録商標)(全地球位置決めシステム)センサー、Galiloセンサー、モバイル電気通信ネットワークに基づく位置センサー等を含み得る。ワイヤレス受信器は、記憶デバイス3に格納されているマップデータベースを更新するための情報を受信するように構成され得る。車両インターフェースは、処理デバイス2が、車両インターフェースを介して他の車両システムまたは車両状況の情報から情報を得ることを可能にし得る。車両インターフェースは、例えば、CAN(コントローラエリアネットワーク)またはMOST(媒体向きデバイス転送)インターフェースを含み得る。
【0060】
記憶デバイス3は、マップデータを含むマップデータベースを格納する。マップデータベースは、ルートサーチを行うための情報を含み得る。加えて、マップデータベースはまた、3次元(3D)マップを出力するための情報を含む。マップデータベースは、ルーフ構造が処理デバイス2によって再現されることを可能にする、ルーフ構造についての情報を含む。処理デバイス2は、3次元ルーフ構造が出力されるように出力インターフェース4を制御する。
【0061】
以下においてより詳細に説明されるように、マップデータベース3は、ルーフ構造のパラメータ記述を格納する。ルーフ構造に対して、1つ以上の閉多角形についての情報が、それぞれ、マップデータベース3に格納されている。多角形は、複数のエッジを含む。多角形は、ルーフ構造のベース平面、またはフート平面に設置され得る。マップデータベース3はさらに、エッジの各々に対して、タイプ識別子の有限集合から選択されるタイプ識別子を格納する。例示として、3つの異なるタイプ識別子は、多角形のエッジが上行のルーフ面に沿って延在すること、または多角形のエッジが上行の壁エッジを有する壁面にわたって延在すること、または多角形のエッジが平らなルーフの側に沿って延在することを示すために使用され得る。
【0062】
それぞれのエッジに割り当てられたタイプ識別子に依存して、マップデータベース3はまた、エッジに割り当てられた1つ以上のパラメータ値を含み得る。例示として、多角形のエッジが上行のルーフ面の下側に沿って延在することを示す第1のタイプ識別子が格納されるときに、少なくとも1つのパラメータ値は、それぞれのエッジに対して、マップデータベースに格納され得る。第2のタイプ識別子が、エッジが上行のルーフ面を有する壁面上に延在することを示す場合に、それぞれのエッジに対して格納されるべきであるパラメータ値がない場合もある。
【0063】
処理デバイス2は、多角形のエッジ、それぞれに格納されたタイプ識別子、および適用可能なら、格納されたパラメータ値についての情報に基づいて、3Dルーフ構造を再現するように構成されている。3Dルーフ構造を再現することは、データを3D描写手順に供給するのに適切である任意の処理を含み得る。例示として、処理デバイス2は、閉多角形の異なるエッジを通過する異なる平面の間の交差線を計算し得る。それによって、3D面またはビクセル格子の座標が計算され得、描写処理に供給され得る。
【0064】
メモリ3に格納されたマープデータベースは、異なる論理層を含み得る。さらに、マップデータベースは、タイリングの異なる更新領域またはタイルに関連付けられている異なるブロックに分割され得る。このような構造は、更新を行うことを容易にする。これは、ローカル変化、例えば、新しいビルディングに対してマップデータベースを調整するように、マップデータベースの更新を行うのに対して特に望ましい。次に、このような更新は、道路ネットワークにおいて変化によって影響された更新領域またはタイルのみを更新することによって行われ得る。これは、更新が、より時間効率がよい方式で、または無線の更新としてより容易に行われることを可能にする。
【0065】
図2は、マップデータベース10の概略的表示である。以下において説明される構造を有するマップデータベース10が、ナビゲーションデバイス1の記憶デバイス3に格納され得る。
【0066】
マップデータベース10は、複数の層11〜15を含む。層は、ルートサーチを行うために必要とされる情報を格納するルーティング層11と、ルート案内のために必要とされるデータを格納する案内層12とを含み得る。マップデータベース10は、追加の層13〜15を含み得る。名前層13は、道路名、ハウス数等への参照を含み得る。関心のあるポイント(POI)層14は、関心のあるポイントについての情報を含み得る。アドバンストドライバー支援システム(ADAS)層15は、アドバンストドライバー支援のためのデータを含み得る。追加または代替的な層、例えば、トラックまたはロリーのための具体的な情報を含むトラック層、ファネチック表示のための層、または基本マップ表示のための層が提供され得る。
【0067】
マップデータベース10は、関係型データベースとして構成され得る。データベースの層のうちの少なくとも1つ、例えば、POI層14または案内層12は、ルーフ構造についての情報を含み得る。この情報は、ルーフ構造の3D表示を含む都市モデルを出力するために使用される。
【0068】
図3は、ルーフ構造を出力するために使用されるデータ20の概略的表示である。データ20は、ナビゲーションデバイス1の記憶デバイス3に格納され得る。
【0069】
データ20は、ルーフ構造を表すデータ21と、別のルーフ構造を表すデータ22とを含む。ルーフ構造を表すデータ21、22は、それぞれ、1つ以上の多角形のエッジ、エッジに対して属性として格納されたタイプ識別子、およびぞれぞれのタイプ識別子に依存して、エッジのいくつかに対してオプション的に格納され得るパラメータ値についての情報を含み得る。タイプ識別子は、それぞれ、タイプ識別子の有限集合から選択される。例示として、3つのタイプ識別の有限集合が使用され得る。
【0070】
ルーフ構造を表すデータ21は、閉多角形に関連付けられているデータ23を含む。1つ以上の追加の閉多角形に関連付けられているデータ27が、データ21に含まれ得る。
【0071】
閉多角形に関連付けられているデータ23は、閉多角形のエッジについての情報を含む。閉多角形が、ルーフ構造のベース平面、すなわち、フート平面において規定され得る。エッジについての情報は、さまざまな形式をとり得る。一実装において、多角形の頂点p1、p2、・・・、pNの座標が、データベースに含み得る。多角形のエッジについての情報を格納するためのこのような形式がいくつかの実施形態において例示されるが、任意の他の適切な形式も使用され得る。例示として、多角形のエッジについての情報は、コーナーポイントのうちの1つ、p1の座標と、前述のコーナーポイントに関連するすべてのエッジの向き、すなわち、p2−p1、p3−p2等を指定する情報とを含み得る。代替的に、多角形のエッジについての情報は、コーナーポイントのうちの1つ、p1の座標と、1つのコーナーポイントに関連する他の全コーナーポイントの場所、すなわち、p2−p1、p3−p1等を規定する情報とを含み得る。
【0072】
データ23は、閉多角形のエッジの各々に割り当てられたタイプ識別子を含む。識別子は、タイプ識別子と多角形のエッジとの間の対応が確立されることを可能にする任意の適切な方式で格納され得る。例示として、コーナーポイントpiからコーナーポイントpi+1まで延在するエッジに対するタイプ識別子TypeIdiが、コーナーポイントpiの座標に対する属性として格納され得る。これは、データ23の列24〜26に対して例示されている。タイプ識別子TypeIdiが、それぞれ、可能なタイプ識別子の有限集合から選択される。集合は、3つの異なるタイプ識別子を含み得る。タイプ識別子と多角形のエッジとの間の対応が確立されることを可能にする他の構造も使用され得る。例示として、多角形のコーナーポイントの座標と、エッジに対するタイプ識別子とを含むデータブロック23が図3に例示され、別個の表が、コーナーポイントの座標とエッジに対するタイプ識別子とを格納するために使用され得る。
【0073】
データ23はまた、多角形のエッジに対して1つ以上のパラメータ値を含み得る。パラメータ値は、各タイプ識別子に対して存在する必要がない。パラメータ値は、少なくとも、エッジが上行のルーフ面の下端側において配置されていることを示すタイプ識別子を有するエッジに対して格納され得る。このようなパラメータ値は、傾斜を定量化し得る。
【0074】
図4〜30を参照してより詳細に説明されるように、3つの異なるタイプ識別子が使用され得る。タイプ識別子の有限集合のみがある限り、異なる数のタイプ識別子が使用され得る。第1のタイプ識別子(また「A」と呼ばれる)は、上行の傾斜のルーフ面の下端側において設置されているエッジに割り当てられ得る。第2のタイプ識別子(また「s」と呼ばれる)は、ルーフ面を支持するための斜めの壁エッジを有する壁面に沿って通過するエッジに割り当てられ得る。第3のタイプ識別子(また「f」と呼ばれる)は、平らなルーフを囲むエッジに割り当てられ得る。言い換えると、傾斜のルーフ面、垂直のルーフ面、または水平のルーフ面に対応する3つのタイプ識別子が使用され得る。
【0075】
タイプ識別子を個々のエッジに割り当てることによって、高度の柔軟性が達成される。これは、幅広い種類のルーフ構造が記述されることを可能にする。異なる平面の間の交差線の計算は、ルーフ構造を出力するときに、オンデマンドで作られ得る。完全にマッチしない、所定の交差から起因する人工物が軽減され得る。
【0076】
図4は、ルーフ構造を出力する方法30のフローチャートである。方法30は、ナビゲーションデバイス1の処理デバイス2によって行われ得る。処理デバイス2は、再現された3Dルーフ構造を光学的に出力するための出力インターフェース4を制御し得る。
【0077】
図4の方法において、ルーフ構造は、データベースに格納されたデータから再現される。データは、多角形のエッジ、エッジに割り当てられたタイプ識別子、および少なくとも、タイプ識別子のうちの所与の1つを有するエッジに対するパラメータ値についての情報を含む。この分野の一般的技術用語に従って、用語「再現する」または「再現」は、データベースに格納されたデータが、3D描写に対して適切なデータを生成するように処理される処理を指すように使用される。例示として、いくつかの実施形態において、ルーフ構造の全平面のコーナーポイントは、ルーフ構造を再現するために、データベースにおいてデータから計算され得る。いくつかの実施形態において、ビクセル格子が生成され得る。他の場合において、データが、3D描写手順に供給され得る。
【0078】
31において、ルーフ構造に関連付けられた多角形が識別される。データベースは、任意のビルディングまたは任意のルーフ構造に対して、データベースがルーフ構造のベース平面において規定されるさまざまな多角形についての情報を含むように編成され得る。
【0079】
32において、閉多角形のエッジとエッジに対して格納されたタイプ識別子とについての情報が検索される。情報は、さまざまな形式を有し得、多角形のコーナーポイントの座標、多角形のエッジベクトルの座標、ベース平面のエッジベクトルの長さおよび向きについての情報、またはエッジの位置および向きが決定されることを可能にするようなデータの任意の組み合わせを含み得る。格納されたタイプ識別子は、それぞれ、可能なタイプ識別子の有限集合から選択される。すなわち、タイプ識別子の各々は、可能な値の有限集合から選択される値を有する。それぞれのタイプ識別子に依存して、パラメータ値が、それぞれのエッジに対して格納され得る。パラメータ値が、エッジに対して格納される場合に、32においてパラメータ値も検索され得る。
【0080】
33において、ルーフ構造を規定するいくつかの平面が決定され得る。平面は、多角形が規定される平面に対する傾斜された「上行の」ルーフ面と、多角形が規定される平面に垂直の壁面と、多角形が規定される平面に延在する「平らな」ルーフとを含み得る。平面を決定することが、さまざまな方法で行われ得る。多角形の異なるエッジを通過する平面の間の交差点が計算され得る。平面は、それぞれ、多角形に規定される平面に対する向きを有し得、向きは、それぞれのエッジに対するタイプ識別子と、適用可能なら、それぞれのエッジに対するパラメータ値とによって決定される。平面を決定することはまた、ルーフ構造内に設置されたポイントのビクセル格子を決定することを含み得る。
【0081】
34において、ルーフ構造を表すデータは、少なくとも1つ以上の多角形に関連付けられたデータを含むか否かが決定される。ルーフ構造を表すデータは、少なくとも1つ以上の多角形に関連付けられたデータを含む場合に、行為32および33が、さらなる多角形に対して繰り返される。もしそうでなければ、方法は、35へ進む。
【0082】
35において、3D描写が行われる。3D描写は、平面のコーナーポイントまたは33において決定された3Dビクセル格子についての情報に基づいて行われ得る。
【0083】
36において、光学出力デバイスは、ルーフ構造の3D表示が出力されるように制御される。
【0084】
タイプ識別子と、適用可能なら、パラメータ値とが閉多角形のエッジに割り当てられるデータベースに格納されたパラメータ記述から3Dルーフ構造を再現するために、多角形のエッジを通過する平面の交差線が計算され得る。対応する手順が図5に示される。
【0085】
図5は、3Dルーフ構造を再現するための手順40のフローチャートである。手順40は、ナビゲーションデバイス1の処理デバイス2によって処理され得る。手順40は、方法30のステップ33を実装するために行われ得る。
【0086】
41において、エッジ索引iにわたる反復が初期化される。
【0087】
42において、多角形のi番目のエッジとi番目のエッジに対するタイプ識別子TypeIdiとについての情報が検索される。
【0088】
43において、タイプ識別子TypeIdiは、第1のタイプ識別子であるか、すなわち、値「A」を有するか否かが決定される。タイプ識別子TypeIdiが値「A」を有する場合に、44において、エッジに対する、データベースに格納された1つ以上のパラメータ値が検索される。45において、閉多角形のエッジiを通過する上行のルーフ構造が生成される。ルーフ面は、44において検索されたパラメータ値によって決定されたルーフ構造のベース平面に対して傾斜を有する少なくとも1つの平面を含むように生成される。次に、方法は、50へ進む。
【0089】
タイプ識別子TypeIdiが値「A」を有しない場合に、タイプ識別子TypeIdiは、第2のタイプ識別子であるか、すなわち、値「s」を有するか否かが決定される。タイプ識別子TypeIdiが値「s」を有する場合に、47において、ベース平面に垂直の壁面が生成される。壁面は、ルーフ面が支持されている上行の壁エッジを有し得る。次に、方法は、50へ進む。
【0090】
タイプ識別子TypeIdiが値「s」を有しない場合に、タイプ識別子TypeIdiは、第3のタイプ識別子であるか、すなわち、値「f」を有するか否かが決定される。タイプ識別子TypeIdiが値「f」を有する場合に、49において、ルーフ構造のベース平面に延在する平らなルーフが生成される。次に、方法は、50へ進む。
【0091】
50において、多角形のエッジわたる反復は、多角形の最後のエッジに到達したか否かが決定される。エッジが多角形の最後のエッジではない場合に、51においてiが増分される。方法は、42に戻る。
【0092】
多角形のエッジわたる反復が、最後のエッジに到達した場合に、52において、再現が継続され得る。この目的のために、45において生成された上行のルーフ面と、47において生成された壁面との間の交差線が形成され得、またはルーフ構造の1つ以上のリッジ線が、多角形の異なるエッジに対して、45において生成されたルーフ面を用いて決定され得る。
【0093】
48における決定ステップが、よりよい例示のために、図5に示されるが、この決定するステップはまた、省略され得る。タイプ識別子の有限集合のみがある場合に、エッジに対するタイプ識別子は、タイプ識別子が任意の他の可能な値を有しないことが事前に決定される場合に、可能の値のうちの1つを有するように断定され得る。
【0094】
異なる面の「生成」が手順40の45、47および49において示されるが、本明細書において、このような生成は、面の場所および向きが、面が実際に出力される必要をせず、決定される処理であるように理解される。さらに、それぞれの面の表面テクスチャーも決定され得る。
【0095】
手順40が、閉多角形のエッジにわたる反復の文脈において例示されているが、さまざまな面(上行のルーフ面、壁面、平らな面)を生成することはまた、すべてのエッジ、タイプ識別子、および適用可能なら、パラメータ値についての情報が検索された後に行われ得る。異なる面は、1つのエッジに対する向きおよびタイプ識別子についての情報も、他のエッジ、関連付けられたタイプ識別子およびパラメータ値についての情報も用いて生成され得る。例示として、以下により詳細に説明されるように、上行のルーフ面の外側境界を決定するために、複数の上行のルーフ面または1つの上行のルーフ面の交差線および壁面が計算され得る。
【0096】
図6は、ルーフ構造の再現を例示する概略的透視図である。多角形は、4つのコーナー、すなわち、頂点を含む。3つのコーナー61〜63が図6において見られ得る。エッジ64は、第1のコーナー61から第2のコーナー62まで延在する。別のエッジ65は、第2のコーナー62から第3のコーナー63まで延在する。多角形は、図6において隠されている2つの追加のエッジを含む。エッジ64、65を有する多角形は、ルーフ構造のベース平面において規定される。
【0097】
エッジ64に対して格納されたタイプ識別子は、エッジ64が上行のルーフ面の下側に沿って延在することを示す値「A」を有する。エッジ65に対して格納されたタイプ識別子は、エッジ65が多角形に規定される平面に垂直に方向を決められた壁面上に延在することを示し、上行の壁エッジを有する値「s」を有する。第3のコーナーポイント63から第4のコーナーポイント(図6に示されていない)までのエッジに対して格納されたタイプ識別子は、エッジが上行のルーフ構造の下側に沿って延在することを示す値「A」を有する。第4のコーナーポイント(図6に示されていない)から第1のコーナーポイント61まで延在するエッジに対して格納されたタイプ識別子は、エッジが壁面上に延在することを示す値「s」を有する。ルーフ構造を記述するデータは、タイプ識別子「A」を有する各エッジに対する傾斜パラメータ値をさらに含む。このパラメータは、上行のルーフ面の傾斜を定量化する。
【0098】
ルーフ構造のこの記述を用いて、ルーフ構造の面55、56が、ルーフ構造の再現のために生成され得る。定義によって、多角形のエッジ64は、上行のルーフ面55の下側において設置される。上行のルーフ面55の横側67が、エッジ64を通過する平面の交差線として決定され得、エッジ64とエッジ65を通過する垂直の平面とに対する傾斜パラメータ値に従って傾斜され得る。上行のルーフ面55の横側66が、エッジ64を通過する平面の交差線として決定され得、エッジ64と第4のコーナーポイントから第1のコーナーポイント61までの多角形のエッジを通過する垂直の平面とに対する傾斜パラメータ値に従って傾斜され得る。上行のルーフ面55の上端を規定するリッジ線68は、タイプ識別子「A」を有するエッジを通過する平面の交差線として決定され得、それぞれ、データベースに格納された、関連付けられた傾斜パラメータ値に従って傾斜され得る。
【0099】
同様に、壁面56を生成するために、上行の壁エッジ67および69は、エッジ65を通過する垂直の平面と、多角形の隣接するエッジを通過する傾斜の平面との間の交差線として決定され得る。例示として、上行の壁エッジ67は、エッジ65を通過する垂直の線と、エッジ64を通過する平面との間の交わり線として決定され得、エッジ64に対して格納された傾斜パラメータ値に従って、ルーフ構造のベース平面に対して傾斜され得る。
【0100】
ルーフ構造のパラメータ記述を用いて、リッジ線58を含む、異なる面の間の横断面エッジが決定され得る。
【0101】
図7は、ルーフ構造の再現を例示する概略的透視図である。多角形は、4つのコーナー71〜74を含む。第1のエッジ75は、第1のコーナー71から第2のコーナー72まで延在する。第2のエッジ76は、第2のコーナー72から第3のコーナー73まで延在する。第3のエッジ77は、第3のコーナー73から第4のコーナー74まで延在する。第4のエッジ78は、第4のコーナー74から第1のコーナー71まで延在する。多角形は、ルーフ構造のベース平面において規定される。
【0102】
エッジ75〜78の各々に対して格納されたタイプ識別子は、エッジ75〜78が平らなルーフを囲むことを示す値「f」を有する。オプション的に、ベース平面に対して0傾斜を示すパラメータ値はまた、ルーフ構造のパラメータ記述に格納され得る。これは、より一般的な手順を用いて、タイプ識別子「f」および「A」を有するエッジの処理を容易にし得る。
【0103】
ルーフ構造を再現する場合に、閉多角形によって囲まれた平らなルーフを表す面57が生成される。
【0104】
タイプ識別子の各々に対して、タイプ識別子は、多角形が設置される平面に対してルーフ面の向きを決定するために使用され得るだけではなく、表面テクスチャーを決定するためにも使用され得る。ルーフ面が上行のルーフ面であることを示す第1のタイプ識別子「A」を有するエッジに対して、表面テクスチャーが、ルーフ面に適用され得、タイプ識別子「s」を有するエッジから延在する壁面に適用された表面テクスチャーと異なる。なお、別の表面テクスチャーが平らなルーフ面に適用され得る。
【0105】
図8および9は、ルーフ構造を再現するためのパラメータ記述の処理を例示する。頂点PiおよびPi+1を有する閉多角形は、ルーフ構造のベース平面80において規定される。多角形のエッジ81は、頂点Piから頂点Pi+1まで延在する。上行のルーフ面82の傾斜αi示す傾斜パラメータ値は、エッジ81が第1のタイプ識別子「A」を有する場合に、ルーフ構造のパラメータ記述においてエッジ81に対して格納される。傾斜パラメータ値αiが、さまざまな形式のうちの任意の1つで格納され得る。例示として、傾斜パラメータ値αi自身が、傾斜パラメータ記述に格納され得る。別の実装において、tanαiが、パラメータ記述に格納され得る。tanαiを用いて、上行のルーフ面の傾斜も容易に決定され得る。傾斜角αiは、0°から180°までの間に規定され得る。90°より小さい値は、ルーフ面が閉多角形の内部に向かって傾斜されることを示し得る。90°より大きい値は、ルーフ面が閉多角形の外部に向かって傾斜されることを示し得る。
【0106】
図9を参照すると、多角形は、コーナーポイントPi+2をさらに含む。多角形の別のエッジ83は、コーナーポイントPi+1からコーナーポイントPi+2までベース平面80内に延在する。エッジ83から上向きに延在するルーフ面84は、ベース平面80に対して傾斜角αi+1で傾斜される。異なる傾斜角αi、αi+1は、上行のルーフ面の異なる傾きを規定し得る。上行のルーフ面84の傾斜αi+1を示す傾斜パラメータは、エッジ83が第1のタイプ識別子「A」を有する場合に、エッジ83に対してルーフ構造のパラメータ記述に格納される。
【0107】
異なるルーフ面の間のリッジを決定するために、エッジ81を通過し、ベース平面に対して角度αiで傾斜した平面82と、エッジ83を通過し、ベース平面に対して角度αi+1で傾斜した平面84との平面交差線85が計算され得る。交差線85は、3D空間においてルーフ構造のエッジを規定する。同様に、ルーフ構造の頂点86は、2つ以上の平面の交差を決定することによって計算され得る。
【0108】
傾斜パラメータ値が、それぞれの面の傾斜を定量化するために、多角形のエッジに対して格納される場合に、傾斜角は、所与の間隔、例えば、0°と180°の間の任意値を有し得る。代替的には、離散した許容値の集合は、離散集合から選択されるルーフ構造の記述に格納された傾斜パラメータ値の各々と共に使用され得る。
【0109】
図10〜17を参照すると、ルーフ構造に対するパラメータ記述の生成および使用が例示される。
【0110】
図10は、ルーフ構造の平面図である。ルーフ構造は、正多角形ではないフートエリアを有する。タイプ識別子がエッジに割り当てられるルーフ構造のパラメータ記述は、ルーフ構造についての情報がコンパクトの方式で表されることを可能にする。
【0111】
ルーフ構造は、全部8つの上行のルーフ面を含む。ルーフ面の各々は、ルーフ構造のベース平面に対して、同じ傾斜角αで傾斜され得る。異なる傾斜角が容易に考慮され得る。
【0112】
図10に概略的に示されるように、ポイントp1、・・・、p8を有する多角形は、ルーフ構造のグラウンド平面において規定される。タイプ識別子「A」が、多角形の各エッジに割り当てられる。各ルーフ面が多角形の内部に向かって同じ角度αで傾斜されるので、角度αを示す適切な傾斜パラメータ値が、エッジの各々に対して格納される。
【0113】
図11は、図10のルーフ構造のパラメータ記述を含むデータ23を例示する。データ23は、ポイントp1、・・・、p8の座標の形の多角形のエッジ、エッジの各々に割り当てられたタイプ識別子「A」、および傾斜角αを示す傾斜パラメータ値についての情報を含む。
【0114】
データ23のパラメータ記述を用いて、図10のルーフ構造が再現され得る。ルーフ構造のリッジ線87、88または他のエッジ89は、図9を参照して説明されるように、多角形のさまざまなエッジを通過する異なる平面の交差線を計算することによって3Dにおける線として計算され得る。
【0115】
図12は、別のルーフ構造の平面図である。ルーフ構造は、正多角形ではないフートエリアを有する。タイプ識別子がエッジに割り当てられているルーフ構造のパラメータ記述は、ルーフ構造についての情報がコンパクトの方式で表されることを可能にする。
【0116】
ルーフ構造は、ポイントp1とp2との間のエッジ、ポイントp2とp9との間のエッジ、ポイントp9とp10との間のエッジ、ポイントp10とp7との間のエッジ、ポイントp7とp8との間のエッジ、およびポイントp8とp1との間のエッジから延在する上行のルーフ面を含む。これらのルーフ面の各々は、ルーフ構造のベース面に対して同じな傾斜角αで傾斜され得る。異なる傾斜角が容易に考慮され得る。ルーフ構造は、上行のルーフエッジ
に隣接して配置されている2つの平らなルーフをさらに含む。
【0117】
図13は、図10のルーフ構造のパラメータ記述を含むデータ23を例示する。3つの閉多角形が、ルーフ構造を記述するために規定される。多角形のうちの1つは、上行のルーフ面がエッジから延在する全部のエッジを含む。他の2つの多角形は、それぞれ、平らなルーフを囲むエッジを含む。
【0118】
データ23は、ポイントp1、p2、p9、p10、p7、p8の座標の形の多角形のエッジ、エッジの各々に割り当てられたタイプ識別子「A」、および傾斜角αを示す傾斜パラメータ値についての情報を含む。
【0119】
データ23は、ポイントp2、p3、p4、p9の座標の形の別の多角形のエッジと、エッジの各々に割り当てられたタイプ識別子「f」とについての情報を含む。データ23はまた、ポイントp10、p5、p6、p7の座標の形の別の多角形のエッジと、エッジの各々に割り当てられたタイプ識別子「f」とについての情報を含む。タイプ識別子「f」を有するこれらの2つの多角形は、2つの平らのルーフを規定する。
【0120】
図14は、別のルーフ構造の平面図である。ルーフ構造は、正多角形ではないフートエリアを有する。タイプ識別子がエッジに割り当てられるルーフ構造のパラメータ記述は、ルーフ構造についての情報がコンパクトの方式で表されることを可能にする。
【0121】
ルーフ構造は、複数の上行のルーフ面と、2つの壁面とを含む。2つの壁面は、ポイントp9とp10との間の多角形のエッジから、およびポイントp8とp1との間の多角形のエッジから延在する。多くの上行のルーフ面は、ルーフ構造のベース平面に対して同じ傾斜角αで傾斜される。ポイントp2とp9との間のエッジから、およびポイントp10とp7との間のエッジから延在する上行のルーフ面は、隣接する上行のルーフ面が継目なしに接するように、それぞれのベース多角形の外側に向かって傾斜される。
【0122】
図15は、図14のルーフ構造のパラメータ記述を含むデータ23を例示する。3つの閉多角形が、ルーフ構造を記述するために規定される。
【0123】
データ23は、ポイントp1、p2、p9、p10、p7、p8の座標の形の閉多角形のエッジについての情報を含む。データ23は、p9からp10までのエッジとp8からp1までのエッジとに割り当てられたタイプ識別子「s」を含む。データ23は、多角形の全部の他のエッジに対するタイプ識別子「A」および傾斜角αを示す傾斜パラメータ値を含む。
【0124】
データ23は、ポイントp2、p3、p4、p9の座標の形の別の多角形のエッジと、これらのエッジの各々に割り当てられたタイプ識別子「A」とについての情報を含む。データ23は、p2からp3まで延在するエッジ、p3からp4まで延在するエッジ、およびp4からp9まで延在するエッジに対して傾斜角αを示す傾斜パラメータ値と、p9からp2まで延在するエッジに対して角度180°−αを示す傾斜パラメータ値とを含む。
【0125】
データ23は、ポイントp10、p5、p6、p7の座標の形の別の多角形のエッジと、これらのエッジの各々に割り当てられたタイプ識別子「A」とについての情報を含む。データ23は、p10からp5まで延在するエッジ、p5からp6まで延在するエッジ、およびp6からp7まで延在するエッジに対して傾斜角αを示す傾斜パラメータ値と、p7からp10まで延在するエッジに対して角度180°−αを示す傾斜パラメータ値とを含む。
【0126】
データ23のパラメータ記述を用いて、図14のルーフ構造が再現され得る。ルーフ構造の上部リッジに設置された頂点ついての情報をデータベースに格納する必要がない。3D空間におけるこのような頂点の場所は、ルーフ構造のパラメータ記述を用いてルーフ構造を再現するときに決定され得る。
【0127】
図16は、別のルーフ構造の平面図である。ルーフ構造は、正多角形ではないフートエリアを有する。タイプ識別子がエッジに割り当てられるルーフ構造のパラメータ記述は、ルーフ構造についての情報がコンパクトの方式で表されることを可能にする。
【0128】
ルーフ構造のフートエリアは、コーナー、または頂点p1、・・・、p18を有する多角形によって規定される。ルーフ構造は、複数の上行のルーフ面と、2つの壁面とを含む。2つの壁面は、ポイントp14とp15との間のエッジから、およびポイントp18とp1との間の多角形のエッジから延在する。全部の上行のルーフ面は、ルーフ構造のベース平面に対して同じ傾斜角αで傾斜される。
【0129】
図17は、図16のルーフ構造のパラメータ記述を含むデータ23を例示する。1つの閉多角形が、ルーフ構造を記述するために規定される。
【0130】
データ23は、ポイントp1、・・・、p18の座標の形の閉多角形のエッジについての情報を含む。データ23は、p14からp15までのエッジとp18からp1までのエッジとに割り当てられたタイプ識別子「s」を含む。データ23は、多角形の全部の他のエッジに対するタイプ識別子「A」および傾斜角αを示す傾斜パラメータ値を含む。
【0131】
このパラメータ記述を用いて、ルーフ構造が再現され得る。ルーフ構造の頂点r1、・・・、r13の座標をデータベースに格納する必要がない。ルーフ構造のリッジおよび上部頂点は、ルーフ構造のベース平面において規定されている多角形の異なるエッジを通過する平面の間の交差線を計算することによって、データ23のパラメータ記述から計算され得る。
【0132】
図18は、比較のために、図16のルーフ構造の可能な従来の記述を例示する。データ91において、ルーフ構造の各平面は、面の頂点の座標によって規定される。これは、ルーフ構造の頂点、例えば、頂点r1、・・・、r13の座標がデータ91にも格納されることを必要とする。図16のルーフ構造に対して、従来の記述は、実施形態に従うパラメータ記述よりコンパクトではない。
【0133】
ルーフ構造のパラメータ記述および3Dルーフ構造を出力する方法は、ドーマーが容易に考慮され得るようにさらに構成され得る。この目的のために、多角形のエッジの長さも0であり得る慣例がルーフ構造のパラメータ記述に導入され得る。すなわち、多角形の2つの頂点が、一致するように可能にされ得る。次に、3Dルーフ構造を出力する方法は、慣例を使用し得、多角形のエッジの長さが0である場合に、閉多角形の前のエッジに直交する実際のエッジから延在するルーフ構造の面が描かれる。従って、ドーマーの記述は、図19および20を参照してより詳細に説明されるように、パラメータ記述に容易に統合され得る。
【0134】
図19は、再現された3Dルーフ構造の概略的透視図であり、図20は、ルーフ構造の平面図である。
【0135】
ルーフ構造のパラメータ記述は、頂点p1、p2、p3、p4、p5、p6、・・・を有するルーフ構造のベース平面において規定される多角形を含む。多角形のエッジのうちのいくつかは、p2=p3およびp4=p5を規定することによって、0を有するように設定される。慣例によって、パラメータ記述からルーフ構造を再現するときに、ルーフ構造の面は、タイプ識別子と、適用可能なら、パラメータ値とを用いて、p2からp3までの長さが0であるエッジに対して生成されると同時に、p2からp3までの多角形のエッジがp1からp2までの前のエッジに垂直に方向を決められたように面を生成する。同様に、ルーフ構造の別の面は、タイプ識別子と、適用可能なら、パラメータ値とを用いて、p4からp5までの長さが0であるエッジに対して生成されると同時に、p4からp5までの多角形のエッジがp3からp4までの前のエッジに垂直に方向を決められたように面を生成する。
【0136】
タイプ識別子「A」と傾斜パラメータ値を長さが0であるエッジに割り当てることによって、ドーマーを有するルーフ構造が再現され得る。図19および20を参照すると、タイプ識別子「A」および傾斜パラメータは、長さが0である、p2からp3まで間のエッジに割り当てられ得る。タイプ識別子「s」が、p3からp4までのエッジに割り当てられ得る。タイプ識別子「A」と傾斜パラメータ値が、長さが0である、p4からp5までのエッジに割り当て得る。
【0137】
長さが0である多角形のエッジが、多角形の平面の前のエッジに直交に方向を決められたように処理される慣例を用いて、ドーマーのルーフ面93が再現される。ルーフ面93は、多角形の平面にある、p3からp4までの前のエッジに垂直である線92を通過する。ルーフ面93は、多角形が規定されている平面に対して、p4からp5までのエッジに対して格納された傾斜パラメータ値に従って傾斜される。ルーフ構造のリッジ線94と上部頂点95は、ルーフ構造のパラメータ記述に基づいて生成された面の間の交差線を計算することによって決定され得る。
【0138】
エッジに割り当てられたタイプ識別子に依存して、平面が生成される実施形態が説明され、平面は、多角形が規定されているベース平面に対して傾斜され(タイプ識別子「A」)、または多角形が規定されているベース平面に垂直であり(タイプ識別子「s」)、または多角形が規定されているベース平面内にあり(タイプ識別子「f」)、その一方で、ルーフ構造の記述、並びにその記述を用いる方法およびデバイスはまた、折れ曲がった面を有するより複雑なルーフ構造を規定するために利用され得る。本明細書において使用されるように、折れ曲がったルーフ面は、ベース面に対して異なる傾斜角で傾斜されている複数の上行の平面得を有するルーフ面であるように理解される。これは、図21〜30を参照してより詳しく説明される。
【0139】
図21は、このような折れ曲がったルーフ面102に対する例を例示する。折れ曲がったルーフ面101は、ルーフ構造のベース平面80に対して異なる角度αi,1とαi,2で傾斜された2つの平面103と104を含む。2つの平面103と104が遭遇するエッジ105は、面103の下端側に平行に延在する。
【0140】
折れ曲がったルーフ面102を含むルーフ構造のパラメータ記述において、閉多角形についての情報が格納されている。情報は、閉多角形のエッジ101についての情報を含む。タイプ識別子「A」は、上行のルーフ面がエッジ101から延在することを示すために、エッジ101に対して格納され得る。2つ以上のパラメータ値が、エッジ101に対して格納され得る。エッジ101に対して格納されたパラメータ値は、傾斜角αi,1を表す第1の傾斜パラメータ値と、傾斜角αi,2を表す第2の傾斜パラメータ値と、多角形のエッジ101対して、2つの面103と104との間のエッジ105の位置を表す相対位置パラメータ値とを含み得る。
【0141】
相対位置パラメータ値は、さまざまな形式のうちの1つをとり得る。例示として、ベース平面80から測定されたエッジ105の高さが格納され得る。代替的に、またはさらに、ベース平面80に平行の方向で測定された、多角形のエッジ101に垂直の方向における多角形のエッジ101からのエッジ105の相対位置が格納され得る。代替的に、またはさらに、多角形のエッジ101から、折れ曲がったルーフ面の平面の間のエージ105の距離が格納され得る。平面103の傾斜角αi,1が既知であるので、これらの値のうちの任意の1つは、エッジ105の位置が、エッジ101に対して決定されることを可能にする。
【0142】
図22は、図21の折れ曲がったルーフ面102の側面図である。多角形の下側エッジ101上へのエッジ105の高さhi,1が例示される。この高さは、エッジ101に対する属性としてマップデータベースに格納され得る。平面104の上部リッジ107を特定する情報を格納する必要がない。リッジ107は、折れ曲がったルーフ面102と、ルーフ構造のパラメータ記述によって規定された他の面との間の交差線を計算することによって決定され得る。
【0143】
図23は、2つの折れ曲がったルーフ面および2つの壁面を有する再現されたルーフ構造の概略的透視図である。2つの折れ曲がった上行のルーフ面の下部平面の傾斜角は、ルーフ構造のベース平面に対してα1の値を有し、2つの折れ曲がった壁面の上部平面の傾斜は、ルーフ構造のベース平面に対してα2の値を有する。2つの平面の間のエッジ105は、ルーフ構造のベース平面の上に高さh1において配置される。
【0144】
コーナーポイントp1、・・・p4を有する閉多角形が、ルーフ構造のベース平面において規定される。エッジ101は、折れ曲がったルーフ面の下端側において、p1からp2まで延在する。
【0145】
図24は、図23のルーフ構造のパラメータ記述を提供するデータ23を示す。
【0146】
第1のタイプ識別子「A」は、p1からp2まで延在するエッジと、p3からp4まで延在するエッジとに割り当てられる。3つのパラメータ値は、これらの2つのエッジの各々に対して格納され、2つの傾斜を表す傾斜パラメータ値と、多角形のエッジ101に対するエッジ105の相対位置を表す相対位置パラメータ値とを含む。
【0147】
第2のタイプ識別子「s」は、p2からp3までのエッジと、p4からp1まで延在するエッジとに割り当てられる。
【0148】
データ23のパラメータ記述を用いて、図23のルーフ構造が再現され得る。エッジ105の場所は、p1からp2までのエッジに対して格納されたパラメータ値を用いて決定され得る。リッジ107の場所は、2つの折れ曲がったルーフ面の間の交差線として計算され得る。
【0149】
図25は、2つの折れ曲がった上行のルーフ面と折れ曲がっていない2つの上行のルーフ面とを有する再現されたルーフ構造の概略的透視図である。図26は、ルーフ構造の平面である。
【0150】
折れ曲がったルーフ面の各々は、エッジ112から延在する第1の上行の平面114と第2の上行の平面115とを含む。折れ曲がっていない平面113は、ルーフ構造を記述するために使用される多角形の他のエッジ111から延在する。
【0151】
折れ曲がったルーフ面の下部平面114の傾斜角は、ルーフ構造のベース平面に対してα1の値を有し、折れ曲がったルーフ面の上部平面115の傾斜は、ルーフ構造のベース平面に対してα2の値を有する。折れ曲がったルーフ面の2つの平面の間のエッジは、ルーフ構造のベースの上に高さh1において配置される。平面113はまた、ベース平面に対してα1の傾斜を有するように仮定される。
【0152】
コーナーポイントp1、・・・p4を有する閉多角形が、ルーフ構造のベース平面において規定されている。多角形のエッジ111は、折れ曲がっていない上行のルーフ面の下端側においてp1からp2まで延在する。多角形のエッジ112は、折れ曲がった上行のルーフ面の下端側においてp4からp1まで延在する。
【0153】
図27は、図25および26のルーフ構造のパラメータ記述を提供するデータ23を示す。
【0154】
第1のタイプ識別子「A」は、多角形のエッジの各々に割り当てられる。折れ曲がっていない上行のルーフ面の傾斜を示す1つのパラメータ値は、それぞれ、p1からp2まで延在するエッジ、およびp3からp4まで延在するエッジに対して格納される。3つのパラメータ値は、それぞれ、p2からp3までのエッジ、およびp4からp1までのエッジに対して格納される。3つのパラメータ値は、2つの傾斜を表す傾斜パラメータ値と、多角形のエッジ112に対する、折れ曲がった面の2つの平面の間のエッジの相対位置を表す相対位置パラメータ値とを含む。
【0155】
データ23のパラメータ記述を用いて、図25のルーフ構造が再現され得る。上行のルーフ面の間のすべてのエッジの場所が、パラメータ記述を用いて決定され得る。この目的のために、面の間の交差線が決定され得る。例えば、リッジ線116の位置を別個のパラメータとして格納する必要がない。
【0156】
ルーフ構造を再現するときに、ナビゲーションデバイス1の処理デバイス2は、多角形のエッジがタイプ識別子「A」を有するか否かに基づいて、次にそれぞれのエッジに対して格納されたパラメータの数にさらに基づいて、上行のルーフ面が折れ曲がったルーフ面であるか否かを決定し得る。
【0157】
タイプ識別子およびパラメータ値が多角形のエッジに割り当てられる、ルーフ構造のパラメータ記述を用いて、より複雑なルーフ構造さえも格納され得る。例示として、バロック時代の教会タワーの建物で見つけられるようなオニオン型のドーム構造が格納され得る。
【0158】
図28は、このようなオニオン型のルーフ構造の平面図であり、図29は、オニオン型ドームの中心軸119を通る断面図である。ルーフ構造は、本明細書において説明されたパラメータ記述を用いて、折れ曲がったルーフ面の点から記述され得る。
【0159】
オニオン型のルーフ構造は、中心軸119に対して30°回転の対称である。12個のエッジを有する正多角形が規定され得る。多角形の12個のエッジは、オニオン型のルーフ構造の基礎伏図を表す。多角形のエッジの各々に対して、第1のタイプ識別子「A」および複数のパラメータ値がデータベースに格納され得る。複数のパラメータ値は、例えば、ベース平面に対する複数の平面の傾斜角も、平面の上部および下部エッジの相対位置を定量化する情報も示し得る。
【0160】
図29を参照すると、多角形のポイントp1とp2との間のエッジから上向きに延在する最も低い平面は、ベース平面に対して傾斜角α1を有する。最も低い平面は、h1の高さにわたって上向きに延在する。隣接する平面は、高さh1において延在するエッジから、ベース平面に対して傾斜角α2で上向きに延在する。この平面は、h2の全高さで上向きに延在する。対応するパラメータは、オニオン型のルーフ構造の上部ポイントに向かって配置されている、隣接する平面の各々に対して規定され得る。それによって、7つの傾斜角α1、・・・、α2の全部が規定され得る。同様に、6個の高さh1、・・・、h6の全部が規定され得る。折れ曲がったルーフ面の最も上の平面の高さh7が、異なる折れ曲がったルーフ面を交差することによって断定され得るので、この高さを別個に格納する必要がない。
【0161】
オニオン型のドーム構造の対称性のために、これらの傾斜角パラメータおよび高さは、多角形の12個のエッジの各々に対して同じである。
【0162】
図30は、オニオン型のドーム構造のパラメータ記述を提供するデータ23を示す。
【0163】
第1のタイプ識別子「A」は、多角形のエッジの各々に割り当てられる。さらに、複数のパラメータ値が、多角形のエッジの各々に対して格納される。パラメータ値は、7つの傾斜角α1、・・・、α7を表す傾斜パラメータ値と、折れ曲がったルーフ面の異なる平面が互いに接するエッジの間の相対位置を表す相対位置パラメータ値h1、・・・、h6と含む。
【0164】
データ23のパラメータ記述を用いて、オニオン型のドーム構造が再現され得る。さまざまな上行のルーフ面の間のすべてのエッジの場所が、パラメータ記述を用いて決定され得る。
【0165】
ルーフ構造を再現するときに、ナビゲーションデバイス1の処理デバイス2は、それぞれのエッジに対して格納されたタイプ識別子「A」とパラメータの数とに基づいて、全部の上行のルーフ面が折れ曲がった面であることを決定し得る。
【0166】
3Dルーフ構造を出力するための方法およびデバイスが、代表的なルーフ構造を参照して説明され、かつ例示されている。説明されたさまざまな原理は、ルーフ構造のパラメータ記述に基づいて光学出力を生成するときだけではなく、ルーフ構造のこのようなパラメータ記述を含むデータベースを生成するときにも利用され得る。
【0167】
図31は、データベースを生成する方法120のフローチャートを示す。データベースは、閉多角形のエッジに割り当てられたタイプ識別子を有する、ルーフ構造のパラメータ記述を含むように生成される。
【0168】
121において、ルーフ構造を表すデータが検索され、少なくとも1つの多角形が規定される。データは、ルーフ構造の平面についての情報を既に含む事前処理されたデータであり得る。代替的には、データはまた、ルーフ構造の平面を決定するように次に事前に処理される未処理データであり得る。閉多角形は、ルーフ構造を表すデータに基づいて、特に平面内のルーフ構造のセグメンテーションに基づいて規定され得る。ルーフ構造が1つ以上の平らなルーフを含む場合に、各平らなルーフを囲むエッジを有する閉多角形が、それぞれ、規定され得る。
【0169】
122において、多角形のエッジにわたる反復が初期化される。
【0170】
123において、多角形のi番目のエッジが上行のルーフ面の下端側上に配置されているか否かが決定される。エッジが上行のルーフ面の下端側上に配置されている場合に、124において、エッジに対するタイプ識別子が、値「A」を有するように設定される。125において、1つ以上のパラメータ値が決定される。パラメータ値は、多角形のエッジiが延在するルーフ面の傾斜角を示す少なくとも1つの傾斜パラメータを含む。次に、方法は、130へ進む。
【0171】
123において、i番目のエッジが上行のルーフ面の下端側上に配置されていないことが決定された場合に、方法は、126へ進む。126において、エッジが、ルーフ面を支持するための上行の壁エッジを有する壁面上に延在するか否かが決定される。エッジが壁面上に延在する場合に、127において、エッジに対するタイプ識別子が値「s」を有するように設定される。次に、方法は、130へ進む。
【0172】
126において、多角形のi番目のエッジが、上行の壁エッジを有する壁面上に延在していないことが決定された場合に、方法は、128へ進む。128において、エッジが、平らなルーフの側に沿って延在するか否かが決定される。エッジが平らなルーフの側に沿って延在する場合に、128において、エッジに対するタイプ識別子が、値「f」を有するように設定される。次に、方法は、130へ進む。
【0173】
130において、タイプ識別子と、適用可能なら、パラメータ値との割り当てが閉多角形のすべてのエッジに対して行われたか否かが決定される。i番目のエッジが最後のエッジではない場合に、131において、エッジ索引が増分される。方法は、123に戻る。
【0174】
タイプ識別子と、適用可能なら、パラメータ値とが閉多角形のすべてのエッジに対して割り当てられていることが決定された場合に、エッジ、エッジに割り当てたタイプ識別子、およびパラメータ値についての情報が、データベースに格納される。
【0175】
121において、2つ以上の多角形が規定された場合に、手順122〜132が、多角形の各々に対して繰り返され得る。
【0176】
図31の方法を用いて生成されたマップデータベースは、実施形態に従って、ナビゲーションデバイスにおいて使用され得る。
【0177】
実施形態に従うデバイスおよび方法が、詳細に説明されたが、変更が他の実施形態において実装され得る。例示として、3つのタイプ識別子を用いる実施形態が説明されるが、別の数のタイプ識別子、または他の意味を有するタイプ識別子が使用され得る。例示として、平らなルーフに対して別個のタイプ識別子を規定するではなく、むしろタイプ識別子「A」と0°の傾斜パラメータ値とを有するルーフ面が平らなルーフに対応する慣例が利用され得る。さらなる実施形態において、4つ以上のタイプ識別子が使用され得る。例示として、別個のタイプ識別子は、折れ曲がっている上行のルーフ面に対して導入され得る。
【0178】
本発明の実施形態が、ナビゲーションデバイスに対して使用され得る。しかしながら、さらなる局面および実施形態に従って、タイプ識別子が、それぞれ、閉多角形のエッジに割り当てられているルーフ構造のパラメータ記述は、3D都市モデルが出力されるべきである他のアプリケーションにおいても使用され得る。
【符号の説明】
【0179】
1 ナビゲーションデバイス
2 処理デバイス
3 記憶デバイス
4 出力インターフェース
5 入力インターフェース
【技術分野】
【0001】
(技術分野)
本発明は、3次元構造を生成するためのデータを格納するデータベースを含むナビゲーションデバイス、3次元構造を出力する方法、およびデータベースを生成する方法に関する。本発明は、特に、3次元ルーフ構造が、データベースに格納されているデータを用いて出力され得るようなデバイスおよび方法に関する。
【背景技術】
【0002】
(背景)
光学出力デバイスは、ナビゲーションデバイスに広く使用されている。このような出力デバイスは、電子マップを出力するために使用され得る。電子マップは、汎用かつコンパクトの利点を有する、小さくて、かつ/または携帯型のデバイスの画面上に表示され得る。電子マップ上に表示されたデータは、例えば、表示されたマップ部分の大きさを変化させることによって、ユーザーにとって関連性があり得る追加の物体、例えば、ナビゲーションデバイスにおいて方向変換を示す方向の矢印を表示することによって、またはユーザーにとって関連性があり得る物体をハイライトすることによって、容易に変更され得、そして適合され得る。
【0003】
3次元マップは、それらの高認識品質のために、ユーザーにとって特に価値があり得る。すなわち、従来の2次元表示と比較されると、3次元マップが出力される場合に、街道の交差点のような環境範囲の認識が容易にされ得る。ビルディングが、ユーザーに出力された3次元マップまたは都市モデル内に含まれ得る。高認識品質を得るために、ルーフ構造もこのようなマップにおいて表示され得ることが望ましい。
【0004】
幅広い種類のルーフ形状が存在するために、ひどく高くであり得る大量の記憶スペースを必要とせず、ルーフの3次元表示についての情報を格納するデータベースを提供することがかなりの挑戦である。1つのアプローチにおいて、ルーフ構造は、平面の表面上に設置されているm組のポイント(ここで、m≧3)としてデータベースに格納されている各表面を有する1集合の平面の表面として表され得る。このアプローチにおいて、大きなデータ量が、ルーフ構造を表すために必要とされ得る。さらに、このアプローチは、隣接する平面の表面の間のミスマッチのために、データから3Dモデルを生成するときに、人工ギャップまたは他の人工物になりやすい場合もある。
【0005】
別のアプローチにおいては、パラメータ表示が、使用され得、ルーフタイプのライブラリに基づく。この場合において、ルーフタイプを識別する1つのタイプ識別子と、さまざまな寸法を規定する1つ以上のパラメータ値とが格納され得る。複数の可能なルーフタイプのうちの1つが識別子によって規定されるこのアプローチが、適度の記憶スペースの要求を用いて実装され得るが、そのアプローチは、減少された柔軟性から悪くなる。ルーフライブラリは、概して、少なくともルーフのベース表面が、正多角形、例えば、長方形である仮定に基づく。より複雑なビルディング輪郭に対してルーフ構造についての情報を格納し、または例えば、ライブラリに規定されるルーフ基本形がないドーマーに対していくつかのルーフ特徴を収容することは、挑戦であり得、また不可能でもあり得る。
【0006】
なお別のアプローチにおいて、上に概要を述べられた2つのアプローチが、互いに組み合わせられ得る。それらのコーナーポイントによるルーフ面の定義は、ルーフライブラリに基づく説明に加えられ得る。それによって、ルーフライブラリの基本形のうちの1つに対応しないルーフ構造もデータベースによって記述され得るのにかかわらず、処理が複雑になり得、記憶スペースの要求が再び大きくなり得る。
【発明の概要】
【発明が解決しようとする課題】
【0007】
(要約)
従って、幅広い種類のルーフ形状を記述するのに柔軟性を提供するナビゲーションデバイスおよび方法に対するニーズがある。また、ルーフ構造がコンパクトの方式で規定されることを可能にし、そして光学出力を生成するときに人工物のリスクを減少させるようなデバイスおよび方法に対するニーズがある。
【0008】
このニーズは、独立請求項において記載されるようなデバイスおよび方法によって的にされる。従属請求項は、実施形態を規定する。
【課題を解決するための手段】
【0009】
一局面に従って、ナビゲーションデバイスが提供される。ナビゲーションデバイスは、光学出力デバイスと、データベースと、処理デバイスとを含む。データベースは、3次元ルーフ構造を規定するデータを格納する。処理デバイスは、データベースに連結されており、データベースから3次元ルーフ構造を規定するデータを検索することと、検索されたデータに基づいて3次元ルーフ構造を再現することと、再現されたルーフ構造を表示するように光学出力デバイスを制御することとを行うように構成されている。検索されたデータは、少なくとも1つの閉多角形のエッジと、エッジの各々に対してデータベースにそれぞれに格納されたタイプ識別子とについての情報を含む。検索されたデータは、少なくとも1つの閉多角形のエッジと、エッジの各々に対してデータベースにそれぞれに格納されたタイプ識別子とについての情報を含む。タイプ識別子の各々は、それぞれ、タイプ識別子の有限集合から選択される。3次元ルーフ構造を再現するために、処理デバイスは、複数の平面を決定するように構成されている。平面が、それぞれ、多角形のエッジを通過し、エッジに対して格納されたタイプ識別子に基づいて決定された向きを有するように、複数の平面が決定される。
【0010】
ナビゲーションデバイスは、さまざまなフートプリントを有するルーフを記述するのにおいて高い柔軟性を提供する。方法は、ルーフ構造の面の全コーナーポイントがデータベースに指定され、そして格納されることを必要としない。
【0011】
タイプ識別子が、全体としてルーフ構造に割り当てられるではなく、むしろ多角形の個々のエッジにそれぞれに割り当てられるように、ルーフ構造についての情報が格納される。それによって、柔軟性が増強される。ルーフ構造を規定するために、データベースに格納された情報は、タイプ識別子である意味でパラメータ的であり、それぞれのタイプ識別子に依存して、パラメータ値が、多角形のエッジに割り当てられる。ルーフ構造の面の全コーナーポイントの座標を格納する必要がない。それによって、記憶スペースの要求が適度に保たれ得る。
【0012】
タイプ識別子の有限集合は、少なくとも、上行のルーフ面に対する第1のタイプ識別子と、ベース平面に垂直に方向を決められている平面に対する第2のタイプ識別子とを含み得る。
【0013】
有限集合に含まれた異なるタイプ識別子の数は、多角形のエッジの数より少なくあり得る。
【0014】
このようなタイプ識別子は、平面の向きを決定するために必要とされる全部の情報を含み得、ただしそれらを必ず含む必要がない。例示として、それぞれのエッジから上向きに延在するルーフ面を表す1つのタイプ識別子であり得る。傾斜角は、別個のパラメータ値としてデータベースに格納され得る。別のタイプ識別子は、エッジがベース平面に対して垂直である壁面にわたって延在することを示し得る。なお、別のタイプ識別子は、多角形が規定されているベース平面内に、それぞれのエッジから多角形の内部に向かって延在する平らなルーフを示し得る。
【0015】
データベースに格納され、データベースから検索された多角形のエッジについての情報は、少なくとも、エッジの向きおよびエッジの長さについての情報を含み得る。この情報が、さまざまな形式で提供され得る。例えば、多角形の頂点の座標がデータベースに格納され得る。多角形のエッジについての情報は、多角形のコーナーポイントの座標を含み得る。代替的には、多角形のエッジについての情報は、多角形の少なくとも1つのポイントの座標と、エッジベクトルについての情報とを含み得る。
【0016】
処理デバイスは、ルーフ構造を再現するために、多角形の異なるエッジを通過する異なる平面の間の交差線を計算するように構成され得る。ルーフ面の全コーナーポイントの手動の定義から生じ得る人工物の問題が軽減され得る。さらに、リッジ線上のポイントの座標がデータベースに格納されることを必要とせず、ルーフ構造のリッジ線が計算され得る。
【0017】
処理デバイスは、再現されたルーフ構造の平面の下端においてそれらの平面の境界を定める線を計算するように構成され得る。この目的のために、処理デバイスは、ビルディングの輪郭についての情報を検索し得る。ビルディングの輪郭は、x−y平面、すなわち、ベース平面内に、多角形に対して生成された全部の平面の下端においてそれらの平面を制限するために使用され得る。
【0018】
検索されたデータは、少なくともエッジの一部に対するパラメータ値を含み得る。パラメータ値の各々は、それぞれ、多角形のエッジのうちの1つに対してデータベースに格納され得る。処理デバイスは、パラメータ値に基づいてルーフ構造を再現するように構成され得る。エッジが、1つのタイプ識別子を有し、ただし、エッジが別のタイプ識別子を有しない場合に、パラメータ値が、選択的に格納され、そしてルーフ構造を再現するために、処理デバイスによって使用され得る。例示として、垂直の壁面が多角形のエッジから上向きに延在することを示すタイプ識別子に対して、それぞれのエッジに対してパラメータ値を格納する必要がない場合もある。傾斜のルーフ面がそれぞれのエッジから上向きに延在することを示すタイプ識別子に対して、傾斜パラメータ値が、傾斜を定量化するために格納され得る。
【0019】
処理デバイスは、エッジに対して格納されたタイプ識別子に基づいて、それぞれのエッジから延在する平面の表面テクスチャーを選択するように構成され得る。これは、壁面が傾斜のルーフ面と異なるテクスチャーであることを可能にする。
【0020】
処理デバイスは、第1のタイプ識別子がデータベースに格納されている多角形のエッジを識別することと、識別されたエッジに対して少なくとも1つの傾斜パラメータ値を検索することと、平面を有する傾斜のルーフ面を生成することとを行うように構成され得る。平面が、識別されたエッジを通過し、かつ傾斜パラメータ値によって規定された傾斜を有するように、傾斜のルーフ面が生成され得る。それによって、傾斜のルーフ面は、第1のタイプ識別子および傾斜角を示すパラメータ値との組み合わせで、多角形のエッジについての情報、特にエッジの向きについての情報を用いて生成され得る。
【0021】
処理デバイスは、第1のタイプ識別子を有するエッジを通過する平面と、多角形の他のエッジを通過する他の平面との間の交差線を計算することによって、傾斜のルーフ面の側を計算するように構成され得る。処理デバイスは、第1のタイプ識別子を有するエッジを通過する平面と、多角形の隣接するエッジを通過する他の平面との間の交差線を計算することによって、傾斜のルーフ面の側を計算するように構成され得る。
【0022】
処理デバイスは、第1のタイプ識別子がデータベースに格納されている多角形の第2のエッジを識別することと、識別された第2のエッジに対して第2の傾斜パラメータ値を検索することと、ルーフ面と第2のルーフ面との間の交差線を計算することとを行うように構成され得る。第2のルーフ面は、第2のエッジを通過し、かつ第2の傾斜パラメータ値によって規定された傾斜を有する第2の平面を含み得る。この方式において、ルーフ構造のリッジ線が計算され得る。データベースにリッジ線上のポイントの座標を格納する必要がない。
【0023】
処理デバイスは、さらなる傾斜パラメータ値が識別されたエッジに対して格納されるか否かを決定するように構成され得る。さらなる傾斜パラメータ値が識別されたエッジに対して格納されている場合に、ルーフ面が、さらなる平面を有する折れ曲がったルーフ面として生成され得る。さらなる平面は、エッジに平行し、かつさらなる傾斜パラメータ値によって規定されたさらなる傾斜を有する。異なる傾斜を有する2つの平面の間のエッジの場所を特定する少なくとも1つの相対位置パラメータ値が、データベースに格納され得る。傾斜パラメータ値と、相対位置パラメータ値とを用いて、平面の間のエッジの位置が決定され得る。
【0024】
処理デバイスは、多角形のエッジを識別するように構成され得、第1のタイプ識別子が、エッジに対して格納され、エッジの長さは、0である。次に、処理デバイスは、ルーフ構造のベース平面に対して傾斜されており、多角形の前のエッジに直交に向きを決定された下端を有するルーフ面を生成し得る。この方法において長さが0であるエッジを処理することによって、追加のタイプ識別子が規定されることを必要とせず、ドーマーが再現され得る。
【0025】
処理デバイスは、第2のタイプ識別子がデータベースに格納されている多角形のエッジを識別することと、ルーフ構造が、ベース平面に垂直に方向を決められている平面を含み、識別されたエッジを通過し、そしてベース平面に対して傾斜された上行の壁エッジを有するように、ルーフ構造を再現することとを行うように構成され得る。それによって、傾斜のルーフ面を支持する壁面が出力され得る。処理デバイスは、傾斜のルーフ面に適用された表面テクスチャーと異なる表面テクスチャーを壁面に適用し得る。
【0026】
処理デバイスは、上行の壁エッジを計算するために、平面とさらなる平面との間の交差線を計算するように構成され得る。平面は、第2のタイプ識別子が割り当てられている識別されたエッジを通過し、かつベース平面に垂直である。さらなる平面は、識別されたエッジに隣接する多角形の別のエッジを通過し、かつベース平面に対して傾斜されている。それによって、上行の壁エッジが決定され得る。
【0027】
処理デバイスは、第3のタイプ識別子がデータベースに格納されている多角形のエッジを識別することと、ルーフ構造が、多角形の識別されたエッジによって囲まれた平らなルーフを含むようにルーフ構造を再現することとを行うように構成され得る。それによって、平らなルーフが、3次元マップに表示され得る。多角形のエッジに割り当てられた第3のタイプ識別子との組み合わせで、平らなルーフを規定するように多角形を用いることによって、幅広い種類の平らなルーフの形状が考慮に入れられ得る。処理デバイスは、傾斜のルーフ面または壁面に適用された表面テクスチャーと異なる表面テクスチャーを平らなルーフに適用し得る。
【0028】
タイプ識別子の有限集合は、3つ以下の異なるタイプ識別子を含み得る。例示として、ルーフ構造のベース平面の多角形の各エッジに対して、データベースに格納されたタイプ識別子は、第1のタイプ識別子、第2のタイプ識別子および第3のタイプ識別子からなる集合から選択され得る。2つまたは3つのタイプ識別子を用いることによって、なお大量のルーフ構造が格納され得、かつ表示され得る。データは、このような限定された数のタイプ識別子に対する一般的な処理ステップを用いて処理され得る。
【0029】
多角形は、ルーフ構造のベース平面、すなわち、フート平面に配置され得る。
【0030】
データベースは、関係型のデータベースであり得る。少なくとも、多角形のエッジに割り当てられたタイプ識別子は、関係型のデータベースの属性として格納され得る。
【0031】
データベースは、ナビゲーションデータ基準(NDS)に従うマップデータベースであり得る。
【0032】
ナビゲーションデバイスは、車両ナビゲーションデバイスであり得る。車両ナビゲーションデバイスは、車両内に取り外し可能に、または固定して設置され得る。
【0033】
ナビゲーションデバイスの光学出力デバイスを介して3次元ルーフ構造を出力する方法が提供される。3次元ルーフ構造を表すデータが、データベースから検索される。検索されたデータは、少なくとも1つの閉多角形のエッジと、エッジの各々に対してデータベースにそれぞれに格納されたタイプ識別子とについての情報を含む。タイプ識別子の各々が、タイプ識別子の有限集合から選択される。3次元ルーフ構造は、エッジと、エッジに対するタイプ識別子とについての情報に基づいて再現される。再現のために、複数の平面が決定されており、それにより、平面は、それぞれ、多角形のエッジを通過し、かつエッジに対して格納されたタイプ識別子に基づいて決定された向きを有する。光学出力デバイスは、再現されたルーフ構造を表示するように制御される。
【0034】
方法は、さまざまなフートエリアを有するルーフを記述するのにおいて高い柔軟性を提供する。方法は、面のすべてのコーナーポイントがデータベースに特定され、かつ格納されることを必要としない。
【0035】
タイプ識別子の有限集合は、少なくとも、上行のルーフ面に対する第1のタイプ識別子と、ベース平面に垂直に方向を決められている平面に対する第2のタイプ識別子とを含み得る。
【0036】
有限集合に含まれた異なるタイプ識別子の数は、多角形のエッジの数より少なくあり得る。
【0037】
検索されたデータは、少なくともエッジの一部に対するパラメータ値を含み得る。パラメータ値の各々は、それぞれ、多角形のエッジのうちの1つに関連付けられて格納され得る。ルーフ構造を再現することは、さらにパラメータ値に基づいて行われ得る。
【0038】
ルーフ構造を再現するときに、第1のタイプ識別子がデータベースに格納される多角形のエッジが識別され得る。識別されたエッジに対する少なくとも1つの傾斜パラメータ値が検索され得る。平面を有する傾斜のルーフ面が形成され得、それにより、平面は、識別されたエッジを通過し、傾斜パラメータ値によって規定された傾斜を有する。
【0039】
第1のタイプ識別子がデータベースに格納されている多角形の第2のエッジが識別され得る。識別された第2のエッジに対して格納された第2の傾斜パラメータ値が検索され得る。ルーフ面と第2のルーフ面との間の交差線が計算され得る。第2のルーフ面は、第2のエッジを通過し、かつ第2の傾斜パラメータ値によって規定された傾斜を有する第2の平面を含み得る。
【0040】
ルーフ構造を再現することは、さらなる傾斜パラメータ値が識別されたエッジに対して格納されるか否かを決定することを含み得る。さらなる傾斜パラメータ値が識別されたエッジに対して格納されている場合に、ルーフ面が、さらなる平面を有する折れ曲がったルーフ面として生成され得る。さらなる平面は、多角形のエッジに平行し、かつ少なくとも1つのさらなる傾斜パラメータ値によって規定されたさらなる傾斜を有し得る。
【0041】
ルーフ構造を再現することは、第2のタイプ識別子がデータベースに格納されている多角形のエッジを識別することを含み得る。ルーフ構造が、それが、ベース平面に垂直に方向を決められている平面を含み、識別されたエッジを通過し、そしてベース平面に対して傾斜された上行の壁エッジを有するように再現され得る。
【0042】
ルーフ構造を再現することは、上行の壁エッジを計算するために、平面とさらなる平面との間の交差線を計算するように構成され得る。平面は、第2のタイプ識別子が割り当てられている識別されたエッジを通過し、かつベース平面に垂直である。さらなる平面は、識別されたエッジに隣接する多角形の別のエッジを通過し、かつベース平面に対して傾斜されている。
【0043】
ルーフ構造を再現することは、上行の壁エッジを計算するために、平面とさらなる平面との間の交差線を計算することを含み得る。ここで、平面は、識別されたエッジを通過し、かつベース平面に垂直であり、さらなる平面は、識別されたエッジに隣接する多角形の別のエッジを通過し、かつベース平面に対して傾斜されている。
【0044】
ルーフ構造を再現することは、第3のタイプ識別子がデータベースに格納されている多角形のエッジを識別することを含み得る。ルーフ構造が、それが多角形の識別されたエッジによって囲まれた平らなルーフを含むよう再現され得る。
【0045】
タイプ識別子の有限集合は、3つ以下の異なるタイプ識別子を含み得る。
【0046】
多角形は、ルーフ構造のベース平面に配置され得る。
【0047】
データベースは、関係型のデータベースであり得る。
【0048】
任意の局面または実施形態に従う、3次元ルーフ構造を出力する方法は、任意の局面または実施形態のナビゲーションデバイスを用いて行われ得る。
【0049】
別の局面に従って、ナビゲーションデータベースを生成する方法が提供される。ナビゲーションデータベースは、それがルーフ構造のパラメータ記述を含むように生成される。3次元ルーフ構造を表すデータが、検索される。データに基づいて、ルーフ構造のベース平面の複数のエッジを含む少なくとも1つの閉多角形が識別される。複数のエッジの各エッジに対して、ルーフ構造のルーフ面に対するエッジの位置に基づいて、タイプ識別子の有限集合から選択されたタイプ識別子が、エッジに割り当てられる。割り当てられたタイプ識別子に基づいて、データから、それぞれのエッジに対してパラメータ値が、選択的に決定され得る。多角形のエッジと、エッジの各々に割り当てられたタイプ識別子とについての情報が、データベースに格納される。
【0050】
この方法を用いて、3次元ルーフ構造を再現し、かつ出力するための情報を含むデータベースが、生成され得る。ルーフ面のすべてのコーナーポイントをデータベースに格納することが必要とされない。むしろ、ルーフ面のパラメータ記述が使用される。タイプ識別子が、全体としてルーフ構造に割り当てられるではなく、むしろ多角形の個々のエッジに割り当てられ、これは、幅広い種類のルーフ構造が格納されることを可能にする。
【0051】
タイプ識別子の集合は、第1のタイプ識別子と、第2のタイプ識別子と、第3のタイプ識別子とを含み得る。エッジが傾斜のルーフ面の下端側に沿って延在する場合に、第1のタイプ識別子が、多角形のエッジに割り当てられ得る。エッジが、ルーフ面を支持するための上行の壁エッジを有する壁面にわたって延在する場合に、第2のタイプ識別子が、多角形のエッジに割り当てられ得る。エッジが平らなルーフ面の側に沿って延在する場合に、第3のタイプ識別子が、多角形のエッジに割り当てられ得る。
【0052】
局面および実施形態が、ナビゲーションデバイスの文脈で説明されているが、さらなる局面および実施形態に従って、方法およびデバイスは、また他のアプリケーションにおいて3次元ルーフ構造を出力するために使用され得る。例示として、方法およびデバイスは、3次元都市モデルが出力されるべきである任意の電子デバイスまたはアプリケーションの光学出力デバイスを介して3次元ルーフ構造を再現し、かつ出力するように使用され得る。
【0053】
前述の特徴と以下に説明されるべきである特徴は、示されるそれぞれの組み合わせにおいても、他の組み合わせまたは単独においても使用され得ることが理解されるべきである。
【0054】
例えば、本発明は、以下の項目を提供する。
(項目1)
ナビゲーションデバイスであって、該ナビゲーションデバイスは、
光学出力デバイス(4)と、
3次元ルーフ構造を規定するデータ(21,22,23)を格納するデータベース(3;20)と、
該データベース(3;20)に連結された処理デバイス(2)と
を含み、
該処理デバイス(2)は、該データベース(3;20)から3次元ルーフ構造を規定するデータ(21,22,23)を検索することと、該検索されたデータ(21,22,23)に基づいて該3次元ルーフ構造を再現することと、該再現されたルーフ構造を表示するように該光学出力デバイス(4)を制御することとを行うように構成されており、
該検索されたデータ(21,22,23)は、少なくとも1つの閉多角形のエッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)の各々に対して該データベース(3;20)にそれぞれに格納されたタイプ識別子とについての情報を含み、該タイプ識別子の各々は、それぞれ、タイプ識別子の有限集合から選択され、該処理デバイス(2)は、該ルーフ構造を再現するために、複数の平面(55−57;82,84;93;103,104;113,114)を決定するように構成されており、該平面(55−57;82,84;93;103,104;113,114)の各々が該多角形のエッジ(64,65;75−78;81,83;101;111,112)を通過し、該エッジに対して格納された該タイプ識別子に基づいて決定された向きを有するように、該平面(55−57;82,84;93;103,104;113,114)の各々が、それぞれに決定される、ナビゲーションデバイス。
(項目2)
上記タイプ識別子の有限集合は、少なくとも、上行のルーフ面に対する第1のタイプ識別子と、ベース平面に垂直に方向を決められている平面に対する第2のタイプ識別子とを含む、上記項目のいずれかに記載のナビゲーションデバイス。
(項目3)
上記検索されたデータ(21,22,23)は、少なくとも上記エッジ(64,65;75−78;81,83;101;111,112)の一部に対するパラメータ値を含み、該パラメータ値の各々は、それぞれ、上記多角形の該エッジ(64,65;75−78;81,83;101;111,112)のうちの1つに関連付けられて格納されており、
上記処理デバイス(2)は、該パラメータ値に基づいて上記ルーフ構造を再現するようにさらに構成されている、上記項目のいずれかに記載のナビゲーションデバイス。
(項目4)
上記処理デバイス(2)は、上記ルーフ構造を再現するときに、第1のタイプ識別子が上記データベース(3;20)に格納されている上記多角形のエッジ(64;81,83;101;111,112)を識別することと、該識別されたエッジ(64;81,83;101;111,112)に対して少なくとも1つの傾斜パラメータ値を検索することと、平面(55;82,84;93;103;113,114)を有する傾斜のルーフ面を生成することとを行うように構成されており、該平面(55;82,84;93;103;113,114)は、該識別されたエッジ(64;81,83;101;111,112)を通過し、かつ該傾斜パラメータ値によって規定された傾斜を有する、上記項目のいずれかに記載のナビゲーションデバイス。
(項目5)
上記処理デバイス(2)は、上記第1のタイプ識別子が上記データベース(3;20)に格納されている上記多角形の第2のエッジ(83;111)を識別することと、該識別された第2のエッジ(83;111)に対して第2の傾斜パラメータ値を検索することと、上記ルーフ面と第2のルーフ面との間の交差線を計算することとを行うように構成されており、該第2のルーフ面は、該第2のエッジ(83;111)を通過し、かつ該第2の傾斜パラメータ値によって規定された傾斜を有する第2の平面(84;113)を含む、上記項目のいずれかに記載のナビゲーションデバイス。
(項目6)
上記処理デバイス(2)は、さらなる傾斜パラメータ値が上記識別されたエッジ(101;112)に対して格納されるか否かを決定することと、さらなる傾斜パラメータ値が該識別されたエッジ(101;112)に対して格納されている場合に、さらなる平面(104;105)を有する折れ曲がったルーフ面(102;114,115)として上記ルーフ面を生成することとを行うように構成されており、該さらなる平面(104;115)は、上記多角形の上記識別されたエッジ(101;112)に平行し、かつ該さらなる傾斜パラメータ値によって規定されたさらなる傾斜を有する、上記項目のいずれかに記載のナビゲーションデバイス。
(項目7)
上記処理デバイス(2)は、第2のタイプ識別子が上記データベース(3;20)に格納されている上記多角形のエッジ(65)を識別することと、上記ルーフ構造が、ベース平面(80)に垂直に方向を決められている平面(56)を含み、該識別されたエッジ(65)を通過し、そして該ベース平面に対して傾斜された上行の壁エッジ(67,69)を有するように、該ルーフ構造を再現することとを行うように構成されている、上記項目のいずれかに記載のナビゲーションデバイス。
(項目8)
上記処理デバイス(2)は、上記上行の壁エッジ(67,69)を計算するために、平面(56)とさらなる平面(55)との間の交差線を計算するように構成されており、該平面(56)は、上記識別されたエッジ(65)を通過し、かつ上記ベース平面(80)に垂直であり、該さらなる平面(55)は、該識別されたエッジ(65)に隣接する上記多角形の別のエッジ(64)を通過し、かつ該ベース平面(80)に対して傾斜されている、上記項目のいずれかに記載のナビゲーションデバイス。
(項目9)
上記処理デバイス(2)は、第3のタイプ識別子が上記データベース(3;20)に格納されている上記多角形のエッジ(75−78)を識別することと、上記ルーフ構造が、該多角形の該識別されたエッジ(75−78)によって囲まれた平らなルーフ(57)を含むように該ルーフ構造を再現することとを行うように構成されている、上記項目のいずれかに記載のナビゲーションデバイス。
(項目10)
上記タイプ識別子の有限集合は、3つ以下の異なるタイプ識別子を含む、上記項目のいずれかに記載のナビゲーションデバイス。
(項目11)
上記多角形は、上記ルーフ構造のベース平面(80)に配置されている、上記項目のいずれかに記載のナビゲーションデバイス。
(項目12)
上記データベース(3;20)は、関係型データベース(3;20)である、上記項目のいずれかに記載のナビゲーションデバイス。
(項目13)
ナビゲーションデバイス(1)の光学出力デバイス(4)を介して3次元ルーフ構造を出力する方法であって、該方法は、
データベース(3;20)から、3次元ルーフ構造を表すデータ(21,22,23)を検索することであって、該検索されたデータ(21,22,23)は、少なくとも1つの閉多角形のエッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)の各々に対して該データベース(3;20)にそれぞれに格納されたタイプ識別子とについての情報を含み、該タイプ識別子の各々が、タイプ識別子の有限集合から選択される、ことと、
該エッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)に対する該タイプ識別子とについての該情報に基づいて該3次元ルーフ構造を再現することであって、複数の平面(55−57;82,84;93;103,104;113,114)が決定されており、その結果、該それぞれの平面は、該多角形のエッジ(64,65;75−78;81,83;101;111,112)を通過し、かつ該エッジ(64,65;75−78;81,83;101;111,112)に対して格納された該タイプ識別子に基づいて決定された向きを有する、ことと、
該再現されたルーフ構造を表示するように、該光学出力デバイス(4)を制御することと
を含む、方法。
(項目14)
上記方法は、上記項目のいずれかに記載のナビゲーションデバイスによって行われる、上記項目のいずれかに記載の方法。
(項目15)
ルーフ構造のパラメータ記述を含む車両ナビゲーションデータベース(3;20)を生成する方法であって、該方法は、
3次元ルーフ構造を表すデータを検索することと、
該データに基づいて、該ルーフ構造のベース平面(80)の複数のエッジ(64,65;75−78;81,83;101;111,112)を含む少なくとも1つの閉多角形を識別することと、
該複数のエッジ(64,65;75−78;81,83;101;111,112)の各エッジに対して、
該ルーフ構造のルーフ面に対する該エッジ(64,65;75−78;81,83;101;111,112)の位置に基づいて、タイプ識別子の有限集合から選択されたタイプ識別子を該エッジ(64,65;75−78;81,83;101;111,112)に割り当てることと、
該割り当てられたタイプ識別子に基づいて、該データから、該それぞれのエッジ(64,65;75−78;81,83;101;111,112)に対してパラメータ値を選択的に決定することと
を行うことと、
該多角形の該エッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)の各々に割り当てられた該タイプ識別子とについての情報を該データベース(3;20)に格納することと
を含む、方法。
(項目16)
上記タイプ識別子の集合は、第1のタイプ識別子と、第2のタイプ識別子と、第3のタイプ識別子とを含み、
エッジ(64;81,83;101;111,112)が傾斜のルーフ面(55;82,84;93;103;113,114)の下端側に沿って延在する場合に、該第1のタイプ識別子が、上記多角形の該エッジに割り当てられ、
エッジ(65)が、上行のルーフ面(55)を支持するための上行の壁エッジ(67,69)を有する壁面(57)にわたって延在する場合に、該第2のタイプ識別子が、該多角形の該エッジ(65)に割り当てられ、
エッジ(75−78)が平らなルーフ面(57)の側に沿って延在する場合に、該第3のタイプ識別子が、該多角形の該エッジ(75−78)に割り当てられる、上記項目のいずれかに記載の方法。
【0055】
(摘要)
ナビゲーションデバイスは、3次元ルーフ構造を再現するためのデータを格納するデータベースを含む。データは、少なくとも1つの閉多角形のエッジ(64,65)と、エッジ(64,65)の各々に対してそれぞれにデータベースに格納されたタイプ識別子とについての情報を含む。タイプ識別子の各々が、タイプ識別子の有限集合からそれぞれに選択される。複数の平面(55−56)が、ルーフ構造を再現するために生成される。平面(55,56)が、多角形のエッジ(64,65)を通過し、かつエッジに対して格納されたタイプ識別子に基づいて決定された向きを有するように、平面(55,56)がそれぞれに決定される。
【0056】
実施形態の前述および他の特徴は、添付した図面に関連して読まれると、実施形態の以下のより詳細な説明からより明白になる。図面において、同様な数字は、同様な構成要素を指す。
【図面の簡単な説明】
【0057】
【図1】図1は、ナビゲーションデバイスの概略的ブロックダイヤグラムである。
【図2】図2は、マップデータベースの概略的表示である。
【図3】図3は、マップデータベースにおけるルーフ構造に関するデータの概略的表示である。
【図4】図4は、ルーフ構造を出力する方法のフローチャートである。
【図5】図5は、ルーフ構造を出力する方法においてルーフ構造を再現する手順のフローチャートである。
【図6】図6は、多角形のエッジに割り当てられたタイプ識別子を例示するための概略図である。
【図7】図7は、多角形のエッジに割り当てられた別のタイプ識別子を例示するための概略図である。
【図8】図8は、上行のルーフ面の生成を例示する概略図である。
【図9】図9は、上行のルーフ面の生成を例示する概略図である。
【図10】図10は、ルーフ構造の平面図である。
【図11】図11は、図10のルーフ構造のパラメータ記述を有するデータを例示する。
【図12】図12は、ルーフ構造の平面図である。
【図13】図13は、図12のルーフ構造のパラメータ記述を有するデータを例示する。
【図14】図14は、ルーフ構造の平面図である。
【図15】図15は、図14のルーフ構造のパラメータ記述を有するデータを例示する。
【図16】図16は、ルーフ構造の平面図である。
【図17】図17は、図16のルーフ構造のパラメータ記述を有するデータを例示する。
【図18】図18は、図16のルーフ構造の従来の記述を有するデータを例示する。
【図19】図19は、再現されたルーフ構造の概略的透視図である。
【図20】図20は、図19のルーフ構造の正面図である。
【図21】図21は、複数の平面を有する折れ曲がったルーフ面を例示する概略的透視図である。
【図22】図22は、図21の折れ曲がったルーフ面の側面図である。
【図23】図23は、折れ曲がったルーフ面を含む再現されたルーフ構造の概略的透視図である。
【図24】図24は、図23のルーフ構造のパラメータ記述を示す。
【図25】図25は、折れ曲がったルーフ面を有する別の再現されたルーフ構造の概略的透視図である。
【図26】図26は、図25のルーフ構造の平面図である。
【図27】図27は、図25および26のルーフ構造のパラメータ記述を有するデータを例示する。
【図28】図28は、オニオンドームのルーフ構造の平面図である。
【図29】図29は、図28のオニオンドームのルーフ構造を通す垂直の平面に沿ってとられた断面図である。
【図30】図30は、図28および29のルーフ構造のパラメータ記述を有するデータを例示する。
【図31】図31は、ナビゲーションデバイスデータベースを生成する方法のフローチャートである。
【発明を実施するための形態】
【0058】
図1は、実施形態に従うナビゲーションデバイス1を概略的に例示する。ナビゲーションデバイス1は、ナビゲーションデバイス1の動作を制御する処理デバイス2を含む。処理デバイス2は、例えば、1つ以上のマイクロプロセッサの形の中央処理ユニット、デジタル信号プロセッサ、または特定用途の集積回路を含み得る。処理デバイス2はまた、グラフィックプロセッサを含み得る。ナビゲーションデバイス1はさらに、記憶デバイス3に格納されているマップデータベースを含む。記憶デバイス3は、ランダムアクセスメモリ、フラッシュメモリまたはハードドライブのようなさまざまなタイプのメモリのうちの1つ、または任意の組み合わせを含み、またコンパクトディスク(CD)、DVD、メモリカード等のような取り外し可能なメモリも含み得る。ナビゲーションデバイス1はまた、情報をユーザーに出力するための出力インターフェース4を含む。出力インターフェース4は、光学出力デバイスを含む。ナビゲーションデバイス1はまた、入力インターフェース5を含み得る。
【0059】
ナビゲーションデバイス1は、位置センサーおよび/またはワイヤレス受信器および/または車両インターフェースのような追加の部品を含み得る。位置センサーは、ナビゲーションデバイス1が設置されている車両の現在の位置を決定するように適合され得る。位置センサーは、GPS(登録商標)(全地球位置決めシステム)センサー、Galiloセンサー、モバイル電気通信ネットワークに基づく位置センサー等を含み得る。ワイヤレス受信器は、記憶デバイス3に格納されているマップデータベースを更新するための情報を受信するように構成され得る。車両インターフェースは、処理デバイス2が、車両インターフェースを介して他の車両システムまたは車両状況の情報から情報を得ることを可能にし得る。車両インターフェースは、例えば、CAN(コントローラエリアネットワーク)またはMOST(媒体向きデバイス転送)インターフェースを含み得る。
【0060】
記憶デバイス3は、マップデータを含むマップデータベースを格納する。マップデータベースは、ルートサーチを行うための情報を含み得る。加えて、マップデータベースはまた、3次元(3D)マップを出力するための情報を含む。マップデータベースは、ルーフ構造が処理デバイス2によって再現されることを可能にする、ルーフ構造についての情報を含む。処理デバイス2は、3次元ルーフ構造が出力されるように出力インターフェース4を制御する。
【0061】
以下においてより詳細に説明されるように、マップデータベース3は、ルーフ構造のパラメータ記述を格納する。ルーフ構造に対して、1つ以上の閉多角形についての情報が、それぞれ、マップデータベース3に格納されている。多角形は、複数のエッジを含む。多角形は、ルーフ構造のベース平面、またはフート平面に設置され得る。マップデータベース3はさらに、エッジの各々に対して、タイプ識別子の有限集合から選択されるタイプ識別子を格納する。例示として、3つの異なるタイプ識別子は、多角形のエッジが上行のルーフ面に沿って延在すること、または多角形のエッジが上行の壁エッジを有する壁面にわたって延在すること、または多角形のエッジが平らなルーフの側に沿って延在することを示すために使用され得る。
【0062】
それぞれのエッジに割り当てられたタイプ識別子に依存して、マップデータベース3はまた、エッジに割り当てられた1つ以上のパラメータ値を含み得る。例示として、多角形のエッジが上行のルーフ面の下側に沿って延在することを示す第1のタイプ識別子が格納されるときに、少なくとも1つのパラメータ値は、それぞれのエッジに対して、マップデータベースに格納され得る。第2のタイプ識別子が、エッジが上行のルーフ面を有する壁面上に延在することを示す場合に、それぞれのエッジに対して格納されるべきであるパラメータ値がない場合もある。
【0063】
処理デバイス2は、多角形のエッジ、それぞれに格納されたタイプ識別子、および適用可能なら、格納されたパラメータ値についての情報に基づいて、3Dルーフ構造を再現するように構成されている。3Dルーフ構造を再現することは、データを3D描写手順に供給するのに適切である任意の処理を含み得る。例示として、処理デバイス2は、閉多角形の異なるエッジを通過する異なる平面の間の交差線を計算し得る。それによって、3D面またはビクセル格子の座標が計算され得、描写処理に供給され得る。
【0064】
メモリ3に格納されたマープデータベースは、異なる論理層を含み得る。さらに、マップデータベースは、タイリングの異なる更新領域またはタイルに関連付けられている異なるブロックに分割され得る。このような構造は、更新を行うことを容易にする。これは、ローカル変化、例えば、新しいビルディングに対してマップデータベースを調整するように、マップデータベースの更新を行うのに対して特に望ましい。次に、このような更新は、道路ネットワークにおいて変化によって影響された更新領域またはタイルのみを更新することによって行われ得る。これは、更新が、より時間効率がよい方式で、または無線の更新としてより容易に行われることを可能にする。
【0065】
図2は、マップデータベース10の概略的表示である。以下において説明される構造を有するマップデータベース10が、ナビゲーションデバイス1の記憶デバイス3に格納され得る。
【0066】
マップデータベース10は、複数の層11〜15を含む。層は、ルートサーチを行うために必要とされる情報を格納するルーティング層11と、ルート案内のために必要とされるデータを格納する案内層12とを含み得る。マップデータベース10は、追加の層13〜15を含み得る。名前層13は、道路名、ハウス数等への参照を含み得る。関心のあるポイント(POI)層14は、関心のあるポイントについての情報を含み得る。アドバンストドライバー支援システム(ADAS)層15は、アドバンストドライバー支援のためのデータを含み得る。追加または代替的な層、例えば、トラックまたはロリーのための具体的な情報を含むトラック層、ファネチック表示のための層、または基本マップ表示のための層が提供され得る。
【0067】
マップデータベース10は、関係型データベースとして構成され得る。データベースの層のうちの少なくとも1つ、例えば、POI層14または案内層12は、ルーフ構造についての情報を含み得る。この情報は、ルーフ構造の3D表示を含む都市モデルを出力するために使用される。
【0068】
図3は、ルーフ構造を出力するために使用されるデータ20の概略的表示である。データ20は、ナビゲーションデバイス1の記憶デバイス3に格納され得る。
【0069】
データ20は、ルーフ構造を表すデータ21と、別のルーフ構造を表すデータ22とを含む。ルーフ構造を表すデータ21、22は、それぞれ、1つ以上の多角形のエッジ、エッジに対して属性として格納されたタイプ識別子、およびぞれぞれのタイプ識別子に依存して、エッジのいくつかに対してオプション的に格納され得るパラメータ値についての情報を含み得る。タイプ識別子は、それぞれ、タイプ識別子の有限集合から選択される。例示として、3つのタイプ識別の有限集合が使用され得る。
【0070】
ルーフ構造を表すデータ21は、閉多角形に関連付けられているデータ23を含む。1つ以上の追加の閉多角形に関連付けられているデータ27が、データ21に含まれ得る。
【0071】
閉多角形に関連付けられているデータ23は、閉多角形のエッジについての情報を含む。閉多角形が、ルーフ構造のベース平面、すなわち、フート平面において規定され得る。エッジについての情報は、さまざまな形式をとり得る。一実装において、多角形の頂点p1、p2、・・・、pNの座標が、データベースに含み得る。多角形のエッジについての情報を格納するためのこのような形式がいくつかの実施形態において例示されるが、任意の他の適切な形式も使用され得る。例示として、多角形のエッジについての情報は、コーナーポイントのうちの1つ、p1の座標と、前述のコーナーポイントに関連するすべてのエッジの向き、すなわち、p2−p1、p3−p2等を指定する情報とを含み得る。代替的に、多角形のエッジについての情報は、コーナーポイントのうちの1つ、p1の座標と、1つのコーナーポイントに関連する他の全コーナーポイントの場所、すなわち、p2−p1、p3−p1等を規定する情報とを含み得る。
【0072】
データ23は、閉多角形のエッジの各々に割り当てられたタイプ識別子を含む。識別子は、タイプ識別子と多角形のエッジとの間の対応が確立されることを可能にする任意の適切な方式で格納され得る。例示として、コーナーポイントpiからコーナーポイントpi+1まで延在するエッジに対するタイプ識別子TypeIdiが、コーナーポイントpiの座標に対する属性として格納され得る。これは、データ23の列24〜26に対して例示されている。タイプ識別子TypeIdiが、それぞれ、可能なタイプ識別子の有限集合から選択される。集合は、3つの異なるタイプ識別子を含み得る。タイプ識別子と多角形のエッジとの間の対応が確立されることを可能にする他の構造も使用され得る。例示として、多角形のコーナーポイントの座標と、エッジに対するタイプ識別子とを含むデータブロック23が図3に例示され、別個の表が、コーナーポイントの座標とエッジに対するタイプ識別子とを格納するために使用され得る。
【0073】
データ23はまた、多角形のエッジに対して1つ以上のパラメータ値を含み得る。パラメータ値は、各タイプ識別子に対して存在する必要がない。パラメータ値は、少なくとも、エッジが上行のルーフ面の下端側において配置されていることを示すタイプ識別子を有するエッジに対して格納され得る。このようなパラメータ値は、傾斜を定量化し得る。
【0074】
図4〜30を参照してより詳細に説明されるように、3つの異なるタイプ識別子が使用され得る。タイプ識別子の有限集合のみがある限り、異なる数のタイプ識別子が使用され得る。第1のタイプ識別子(また「A」と呼ばれる)は、上行の傾斜のルーフ面の下端側において設置されているエッジに割り当てられ得る。第2のタイプ識別子(また「s」と呼ばれる)は、ルーフ面を支持するための斜めの壁エッジを有する壁面に沿って通過するエッジに割り当てられ得る。第3のタイプ識別子(また「f」と呼ばれる)は、平らなルーフを囲むエッジに割り当てられ得る。言い換えると、傾斜のルーフ面、垂直のルーフ面、または水平のルーフ面に対応する3つのタイプ識別子が使用され得る。
【0075】
タイプ識別子を個々のエッジに割り当てることによって、高度の柔軟性が達成される。これは、幅広い種類のルーフ構造が記述されることを可能にする。異なる平面の間の交差線の計算は、ルーフ構造を出力するときに、オンデマンドで作られ得る。完全にマッチしない、所定の交差から起因する人工物が軽減され得る。
【0076】
図4は、ルーフ構造を出力する方法30のフローチャートである。方法30は、ナビゲーションデバイス1の処理デバイス2によって行われ得る。処理デバイス2は、再現された3Dルーフ構造を光学的に出力するための出力インターフェース4を制御し得る。
【0077】
図4の方法において、ルーフ構造は、データベースに格納されたデータから再現される。データは、多角形のエッジ、エッジに割り当てられたタイプ識別子、および少なくとも、タイプ識別子のうちの所与の1つを有するエッジに対するパラメータ値についての情報を含む。この分野の一般的技術用語に従って、用語「再現する」または「再現」は、データベースに格納されたデータが、3D描写に対して適切なデータを生成するように処理される処理を指すように使用される。例示として、いくつかの実施形態において、ルーフ構造の全平面のコーナーポイントは、ルーフ構造を再現するために、データベースにおいてデータから計算され得る。いくつかの実施形態において、ビクセル格子が生成され得る。他の場合において、データが、3D描写手順に供給され得る。
【0078】
31において、ルーフ構造に関連付けられた多角形が識別される。データベースは、任意のビルディングまたは任意のルーフ構造に対して、データベースがルーフ構造のベース平面において規定されるさまざまな多角形についての情報を含むように編成され得る。
【0079】
32において、閉多角形のエッジとエッジに対して格納されたタイプ識別子とについての情報が検索される。情報は、さまざまな形式を有し得、多角形のコーナーポイントの座標、多角形のエッジベクトルの座標、ベース平面のエッジベクトルの長さおよび向きについての情報、またはエッジの位置および向きが決定されることを可能にするようなデータの任意の組み合わせを含み得る。格納されたタイプ識別子は、それぞれ、可能なタイプ識別子の有限集合から選択される。すなわち、タイプ識別子の各々は、可能な値の有限集合から選択される値を有する。それぞれのタイプ識別子に依存して、パラメータ値が、それぞれのエッジに対して格納され得る。パラメータ値が、エッジに対して格納される場合に、32においてパラメータ値も検索され得る。
【0080】
33において、ルーフ構造を規定するいくつかの平面が決定され得る。平面は、多角形が規定される平面に対する傾斜された「上行の」ルーフ面と、多角形が規定される平面に垂直の壁面と、多角形が規定される平面に延在する「平らな」ルーフとを含み得る。平面を決定することが、さまざまな方法で行われ得る。多角形の異なるエッジを通過する平面の間の交差点が計算され得る。平面は、それぞれ、多角形に規定される平面に対する向きを有し得、向きは、それぞれのエッジに対するタイプ識別子と、適用可能なら、それぞれのエッジに対するパラメータ値とによって決定される。平面を決定することはまた、ルーフ構造内に設置されたポイントのビクセル格子を決定することを含み得る。
【0081】
34において、ルーフ構造を表すデータは、少なくとも1つ以上の多角形に関連付けられたデータを含むか否かが決定される。ルーフ構造を表すデータは、少なくとも1つ以上の多角形に関連付けられたデータを含む場合に、行為32および33が、さらなる多角形に対して繰り返される。もしそうでなければ、方法は、35へ進む。
【0082】
35において、3D描写が行われる。3D描写は、平面のコーナーポイントまたは33において決定された3Dビクセル格子についての情報に基づいて行われ得る。
【0083】
36において、光学出力デバイスは、ルーフ構造の3D表示が出力されるように制御される。
【0084】
タイプ識別子と、適用可能なら、パラメータ値とが閉多角形のエッジに割り当てられるデータベースに格納されたパラメータ記述から3Dルーフ構造を再現するために、多角形のエッジを通過する平面の交差線が計算され得る。対応する手順が図5に示される。
【0085】
図5は、3Dルーフ構造を再現するための手順40のフローチャートである。手順40は、ナビゲーションデバイス1の処理デバイス2によって処理され得る。手順40は、方法30のステップ33を実装するために行われ得る。
【0086】
41において、エッジ索引iにわたる反復が初期化される。
【0087】
42において、多角形のi番目のエッジとi番目のエッジに対するタイプ識別子TypeIdiとについての情報が検索される。
【0088】
43において、タイプ識別子TypeIdiは、第1のタイプ識別子であるか、すなわち、値「A」を有するか否かが決定される。タイプ識別子TypeIdiが値「A」を有する場合に、44において、エッジに対する、データベースに格納された1つ以上のパラメータ値が検索される。45において、閉多角形のエッジiを通過する上行のルーフ構造が生成される。ルーフ面は、44において検索されたパラメータ値によって決定されたルーフ構造のベース平面に対して傾斜を有する少なくとも1つの平面を含むように生成される。次に、方法は、50へ進む。
【0089】
タイプ識別子TypeIdiが値「A」を有しない場合に、タイプ識別子TypeIdiは、第2のタイプ識別子であるか、すなわち、値「s」を有するか否かが決定される。タイプ識別子TypeIdiが値「s」を有する場合に、47において、ベース平面に垂直の壁面が生成される。壁面は、ルーフ面が支持されている上行の壁エッジを有し得る。次に、方法は、50へ進む。
【0090】
タイプ識別子TypeIdiが値「s」を有しない場合に、タイプ識別子TypeIdiは、第3のタイプ識別子であるか、すなわち、値「f」を有するか否かが決定される。タイプ識別子TypeIdiが値「f」を有する場合に、49において、ルーフ構造のベース平面に延在する平らなルーフが生成される。次に、方法は、50へ進む。
【0091】
50において、多角形のエッジわたる反復は、多角形の最後のエッジに到達したか否かが決定される。エッジが多角形の最後のエッジではない場合に、51においてiが増分される。方法は、42に戻る。
【0092】
多角形のエッジわたる反復が、最後のエッジに到達した場合に、52において、再現が継続され得る。この目的のために、45において生成された上行のルーフ面と、47において生成された壁面との間の交差線が形成され得、またはルーフ構造の1つ以上のリッジ線が、多角形の異なるエッジに対して、45において生成されたルーフ面を用いて決定され得る。
【0093】
48における決定ステップが、よりよい例示のために、図5に示されるが、この決定するステップはまた、省略され得る。タイプ識別子の有限集合のみがある場合に、エッジに対するタイプ識別子は、タイプ識別子が任意の他の可能な値を有しないことが事前に決定される場合に、可能の値のうちの1つを有するように断定され得る。
【0094】
異なる面の「生成」が手順40の45、47および49において示されるが、本明細書において、このような生成は、面の場所および向きが、面が実際に出力される必要をせず、決定される処理であるように理解される。さらに、それぞれの面の表面テクスチャーも決定され得る。
【0095】
手順40が、閉多角形のエッジにわたる反復の文脈において例示されているが、さまざまな面(上行のルーフ面、壁面、平らな面)を生成することはまた、すべてのエッジ、タイプ識別子、および適用可能なら、パラメータ値についての情報が検索された後に行われ得る。異なる面は、1つのエッジに対する向きおよびタイプ識別子についての情報も、他のエッジ、関連付けられたタイプ識別子およびパラメータ値についての情報も用いて生成され得る。例示として、以下により詳細に説明されるように、上行のルーフ面の外側境界を決定するために、複数の上行のルーフ面または1つの上行のルーフ面の交差線および壁面が計算され得る。
【0096】
図6は、ルーフ構造の再現を例示する概略的透視図である。多角形は、4つのコーナー、すなわち、頂点を含む。3つのコーナー61〜63が図6において見られ得る。エッジ64は、第1のコーナー61から第2のコーナー62まで延在する。別のエッジ65は、第2のコーナー62から第3のコーナー63まで延在する。多角形は、図6において隠されている2つの追加のエッジを含む。エッジ64、65を有する多角形は、ルーフ構造のベース平面において規定される。
【0097】
エッジ64に対して格納されたタイプ識別子は、エッジ64が上行のルーフ面の下側に沿って延在することを示す値「A」を有する。エッジ65に対して格納されたタイプ識別子は、エッジ65が多角形に規定される平面に垂直に方向を決められた壁面上に延在することを示し、上行の壁エッジを有する値「s」を有する。第3のコーナーポイント63から第4のコーナーポイント(図6に示されていない)までのエッジに対して格納されたタイプ識別子は、エッジが上行のルーフ構造の下側に沿って延在することを示す値「A」を有する。第4のコーナーポイント(図6に示されていない)から第1のコーナーポイント61まで延在するエッジに対して格納されたタイプ識別子は、エッジが壁面上に延在することを示す値「s」を有する。ルーフ構造を記述するデータは、タイプ識別子「A」を有する各エッジに対する傾斜パラメータ値をさらに含む。このパラメータは、上行のルーフ面の傾斜を定量化する。
【0098】
ルーフ構造のこの記述を用いて、ルーフ構造の面55、56が、ルーフ構造の再現のために生成され得る。定義によって、多角形のエッジ64は、上行のルーフ面55の下側において設置される。上行のルーフ面55の横側67が、エッジ64を通過する平面の交差線として決定され得、エッジ64とエッジ65を通過する垂直の平面とに対する傾斜パラメータ値に従って傾斜され得る。上行のルーフ面55の横側66が、エッジ64を通過する平面の交差線として決定され得、エッジ64と第4のコーナーポイントから第1のコーナーポイント61までの多角形のエッジを通過する垂直の平面とに対する傾斜パラメータ値に従って傾斜され得る。上行のルーフ面55の上端を規定するリッジ線68は、タイプ識別子「A」を有するエッジを通過する平面の交差線として決定され得、それぞれ、データベースに格納された、関連付けられた傾斜パラメータ値に従って傾斜され得る。
【0099】
同様に、壁面56を生成するために、上行の壁エッジ67および69は、エッジ65を通過する垂直の平面と、多角形の隣接するエッジを通過する傾斜の平面との間の交差線として決定され得る。例示として、上行の壁エッジ67は、エッジ65を通過する垂直の線と、エッジ64を通過する平面との間の交わり線として決定され得、エッジ64に対して格納された傾斜パラメータ値に従って、ルーフ構造のベース平面に対して傾斜され得る。
【0100】
ルーフ構造のパラメータ記述を用いて、リッジ線58を含む、異なる面の間の横断面エッジが決定され得る。
【0101】
図7は、ルーフ構造の再現を例示する概略的透視図である。多角形は、4つのコーナー71〜74を含む。第1のエッジ75は、第1のコーナー71から第2のコーナー72まで延在する。第2のエッジ76は、第2のコーナー72から第3のコーナー73まで延在する。第3のエッジ77は、第3のコーナー73から第4のコーナー74まで延在する。第4のエッジ78は、第4のコーナー74から第1のコーナー71まで延在する。多角形は、ルーフ構造のベース平面において規定される。
【0102】
エッジ75〜78の各々に対して格納されたタイプ識別子は、エッジ75〜78が平らなルーフを囲むことを示す値「f」を有する。オプション的に、ベース平面に対して0傾斜を示すパラメータ値はまた、ルーフ構造のパラメータ記述に格納され得る。これは、より一般的な手順を用いて、タイプ識別子「f」および「A」を有するエッジの処理を容易にし得る。
【0103】
ルーフ構造を再現する場合に、閉多角形によって囲まれた平らなルーフを表す面57が生成される。
【0104】
タイプ識別子の各々に対して、タイプ識別子は、多角形が設置される平面に対してルーフ面の向きを決定するために使用され得るだけではなく、表面テクスチャーを決定するためにも使用され得る。ルーフ面が上行のルーフ面であることを示す第1のタイプ識別子「A」を有するエッジに対して、表面テクスチャーが、ルーフ面に適用され得、タイプ識別子「s」を有するエッジから延在する壁面に適用された表面テクスチャーと異なる。なお、別の表面テクスチャーが平らなルーフ面に適用され得る。
【0105】
図8および9は、ルーフ構造を再現するためのパラメータ記述の処理を例示する。頂点PiおよびPi+1を有する閉多角形は、ルーフ構造のベース平面80において規定される。多角形のエッジ81は、頂点Piから頂点Pi+1まで延在する。上行のルーフ面82の傾斜αi示す傾斜パラメータ値は、エッジ81が第1のタイプ識別子「A」を有する場合に、ルーフ構造のパラメータ記述においてエッジ81に対して格納される。傾斜パラメータ値αiが、さまざまな形式のうちの任意の1つで格納され得る。例示として、傾斜パラメータ値αi自身が、傾斜パラメータ記述に格納され得る。別の実装において、tanαiが、パラメータ記述に格納され得る。tanαiを用いて、上行のルーフ面の傾斜も容易に決定され得る。傾斜角αiは、0°から180°までの間に規定され得る。90°より小さい値は、ルーフ面が閉多角形の内部に向かって傾斜されることを示し得る。90°より大きい値は、ルーフ面が閉多角形の外部に向かって傾斜されることを示し得る。
【0106】
図9を参照すると、多角形は、コーナーポイントPi+2をさらに含む。多角形の別のエッジ83は、コーナーポイントPi+1からコーナーポイントPi+2までベース平面80内に延在する。エッジ83から上向きに延在するルーフ面84は、ベース平面80に対して傾斜角αi+1で傾斜される。異なる傾斜角αi、αi+1は、上行のルーフ面の異なる傾きを規定し得る。上行のルーフ面84の傾斜αi+1を示す傾斜パラメータは、エッジ83が第1のタイプ識別子「A」を有する場合に、エッジ83に対してルーフ構造のパラメータ記述に格納される。
【0107】
異なるルーフ面の間のリッジを決定するために、エッジ81を通過し、ベース平面に対して角度αiで傾斜した平面82と、エッジ83を通過し、ベース平面に対して角度αi+1で傾斜した平面84との平面交差線85が計算され得る。交差線85は、3D空間においてルーフ構造のエッジを規定する。同様に、ルーフ構造の頂点86は、2つ以上の平面の交差を決定することによって計算され得る。
【0108】
傾斜パラメータ値が、それぞれの面の傾斜を定量化するために、多角形のエッジに対して格納される場合に、傾斜角は、所与の間隔、例えば、0°と180°の間の任意値を有し得る。代替的には、離散した許容値の集合は、離散集合から選択されるルーフ構造の記述に格納された傾斜パラメータ値の各々と共に使用され得る。
【0109】
図10〜17を参照すると、ルーフ構造に対するパラメータ記述の生成および使用が例示される。
【0110】
図10は、ルーフ構造の平面図である。ルーフ構造は、正多角形ではないフートエリアを有する。タイプ識別子がエッジに割り当てられるルーフ構造のパラメータ記述は、ルーフ構造についての情報がコンパクトの方式で表されることを可能にする。
【0111】
ルーフ構造は、全部8つの上行のルーフ面を含む。ルーフ面の各々は、ルーフ構造のベース平面に対して、同じ傾斜角αで傾斜され得る。異なる傾斜角が容易に考慮され得る。
【0112】
図10に概略的に示されるように、ポイントp1、・・・、p8を有する多角形は、ルーフ構造のグラウンド平面において規定される。タイプ識別子「A」が、多角形の各エッジに割り当てられる。各ルーフ面が多角形の内部に向かって同じ角度αで傾斜されるので、角度αを示す適切な傾斜パラメータ値が、エッジの各々に対して格納される。
【0113】
図11は、図10のルーフ構造のパラメータ記述を含むデータ23を例示する。データ23は、ポイントp1、・・・、p8の座標の形の多角形のエッジ、エッジの各々に割り当てられたタイプ識別子「A」、および傾斜角αを示す傾斜パラメータ値についての情報を含む。
【0114】
データ23のパラメータ記述を用いて、図10のルーフ構造が再現され得る。ルーフ構造のリッジ線87、88または他のエッジ89は、図9を参照して説明されるように、多角形のさまざまなエッジを通過する異なる平面の交差線を計算することによって3Dにおける線として計算され得る。
【0115】
図12は、別のルーフ構造の平面図である。ルーフ構造は、正多角形ではないフートエリアを有する。タイプ識別子がエッジに割り当てられているルーフ構造のパラメータ記述は、ルーフ構造についての情報がコンパクトの方式で表されることを可能にする。
【0116】
ルーフ構造は、ポイントp1とp2との間のエッジ、ポイントp2とp9との間のエッジ、ポイントp9とp10との間のエッジ、ポイントp10とp7との間のエッジ、ポイントp7とp8との間のエッジ、およびポイントp8とp1との間のエッジから延在する上行のルーフ面を含む。これらのルーフ面の各々は、ルーフ構造のベース面に対して同じな傾斜角αで傾斜され得る。異なる傾斜角が容易に考慮され得る。ルーフ構造は、上行のルーフエッジ
に隣接して配置されている2つの平らなルーフをさらに含む。
【0117】
図13は、図10のルーフ構造のパラメータ記述を含むデータ23を例示する。3つの閉多角形が、ルーフ構造を記述するために規定される。多角形のうちの1つは、上行のルーフ面がエッジから延在する全部のエッジを含む。他の2つの多角形は、それぞれ、平らなルーフを囲むエッジを含む。
【0118】
データ23は、ポイントp1、p2、p9、p10、p7、p8の座標の形の多角形のエッジ、エッジの各々に割り当てられたタイプ識別子「A」、および傾斜角αを示す傾斜パラメータ値についての情報を含む。
【0119】
データ23は、ポイントp2、p3、p4、p9の座標の形の別の多角形のエッジと、エッジの各々に割り当てられたタイプ識別子「f」とについての情報を含む。データ23はまた、ポイントp10、p5、p6、p7の座標の形の別の多角形のエッジと、エッジの各々に割り当てられたタイプ識別子「f」とについての情報を含む。タイプ識別子「f」を有するこれらの2つの多角形は、2つの平らのルーフを規定する。
【0120】
図14は、別のルーフ構造の平面図である。ルーフ構造は、正多角形ではないフートエリアを有する。タイプ識別子がエッジに割り当てられるルーフ構造のパラメータ記述は、ルーフ構造についての情報がコンパクトの方式で表されることを可能にする。
【0121】
ルーフ構造は、複数の上行のルーフ面と、2つの壁面とを含む。2つの壁面は、ポイントp9とp10との間の多角形のエッジから、およびポイントp8とp1との間の多角形のエッジから延在する。多くの上行のルーフ面は、ルーフ構造のベース平面に対して同じ傾斜角αで傾斜される。ポイントp2とp9との間のエッジから、およびポイントp10とp7との間のエッジから延在する上行のルーフ面は、隣接する上行のルーフ面が継目なしに接するように、それぞれのベース多角形の外側に向かって傾斜される。
【0122】
図15は、図14のルーフ構造のパラメータ記述を含むデータ23を例示する。3つの閉多角形が、ルーフ構造を記述するために規定される。
【0123】
データ23は、ポイントp1、p2、p9、p10、p7、p8の座標の形の閉多角形のエッジについての情報を含む。データ23は、p9からp10までのエッジとp8からp1までのエッジとに割り当てられたタイプ識別子「s」を含む。データ23は、多角形の全部の他のエッジに対するタイプ識別子「A」および傾斜角αを示す傾斜パラメータ値を含む。
【0124】
データ23は、ポイントp2、p3、p4、p9の座標の形の別の多角形のエッジと、これらのエッジの各々に割り当てられたタイプ識別子「A」とについての情報を含む。データ23は、p2からp3まで延在するエッジ、p3からp4まで延在するエッジ、およびp4からp9まで延在するエッジに対して傾斜角αを示す傾斜パラメータ値と、p9からp2まで延在するエッジに対して角度180°−αを示す傾斜パラメータ値とを含む。
【0125】
データ23は、ポイントp10、p5、p6、p7の座標の形の別の多角形のエッジと、これらのエッジの各々に割り当てられたタイプ識別子「A」とについての情報を含む。データ23は、p10からp5まで延在するエッジ、p5からp6まで延在するエッジ、およびp6からp7まで延在するエッジに対して傾斜角αを示す傾斜パラメータ値と、p7からp10まで延在するエッジに対して角度180°−αを示す傾斜パラメータ値とを含む。
【0126】
データ23のパラメータ記述を用いて、図14のルーフ構造が再現され得る。ルーフ構造の上部リッジに設置された頂点ついての情報をデータベースに格納する必要がない。3D空間におけるこのような頂点の場所は、ルーフ構造のパラメータ記述を用いてルーフ構造を再現するときに決定され得る。
【0127】
図16は、別のルーフ構造の平面図である。ルーフ構造は、正多角形ではないフートエリアを有する。タイプ識別子がエッジに割り当てられるルーフ構造のパラメータ記述は、ルーフ構造についての情報がコンパクトの方式で表されることを可能にする。
【0128】
ルーフ構造のフートエリアは、コーナー、または頂点p1、・・・、p18を有する多角形によって規定される。ルーフ構造は、複数の上行のルーフ面と、2つの壁面とを含む。2つの壁面は、ポイントp14とp15との間のエッジから、およびポイントp18とp1との間の多角形のエッジから延在する。全部の上行のルーフ面は、ルーフ構造のベース平面に対して同じ傾斜角αで傾斜される。
【0129】
図17は、図16のルーフ構造のパラメータ記述を含むデータ23を例示する。1つの閉多角形が、ルーフ構造を記述するために規定される。
【0130】
データ23は、ポイントp1、・・・、p18の座標の形の閉多角形のエッジについての情報を含む。データ23は、p14からp15までのエッジとp18からp1までのエッジとに割り当てられたタイプ識別子「s」を含む。データ23は、多角形の全部の他のエッジに対するタイプ識別子「A」および傾斜角αを示す傾斜パラメータ値を含む。
【0131】
このパラメータ記述を用いて、ルーフ構造が再現され得る。ルーフ構造の頂点r1、・・・、r13の座標をデータベースに格納する必要がない。ルーフ構造のリッジおよび上部頂点は、ルーフ構造のベース平面において規定されている多角形の異なるエッジを通過する平面の間の交差線を計算することによって、データ23のパラメータ記述から計算され得る。
【0132】
図18は、比較のために、図16のルーフ構造の可能な従来の記述を例示する。データ91において、ルーフ構造の各平面は、面の頂点の座標によって規定される。これは、ルーフ構造の頂点、例えば、頂点r1、・・・、r13の座標がデータ91にも格納されることを必要とする。図16のルーフ構造に対して、従来の記述は、実施形態に従うパラメータ記述よりコンパクトではない。
【0133】
ルーフ構造のパラメータ記述および3Dルーフ構造を出力する方法は、ドーマーが容易に考慮され得るようにさらに構成され得る。この目的のために、多角形のエッジの長さも0であり得る慣例がルーフ構造のパラメータ記述に導入され得る。すなわち、多角形の2つの頂点が、一致するように可能にされ得る。次に、3Dルーフ構造を出力する方法は、慣例を使用し得、多角形のエッジの長さが0である場合に、閉多角形の前のエッジに直交する実際のエッジから延在するルーフ構造の面が描かれる。従って、ドーマーの記述は、図19および20を参照してより詳細に説明されるように、パラメータ記述に容易に統合され得る。
【0134】
図19は、再現された3Dルーフ構造の概略的透視図であり、図20は、ルーフ構造の平面図である。
【0135】
ルーフ構造のパラメータ記述は、頂点p1、p2、p3、p4、p5、p6、・・・を有するルーフ構造のベース平面において規定される多角形を含む。多角形のエッジのうちのいくつかは、p2=p3およびp4=p5を規定することによって、0を有するように設定される。慣例によって、パラメータ記述からルーフ構造を再現するときに、ルーフ構造の面は、タイプ識別子と、適用可能なら、パラメータ値とを用いて、p2からp3までの長さが0であるエッジに対して生成されると同時に、p2からp3までの多角形のエッジがp1からp2までの前のエッジに垂直に方向を決められたように面を生成する。同様に、ルーフ構造の別の面は、タイプ識別子と、適用可能なら、パラメータ値とを用いて、p4からp5までの長さが0であるエッジに対して生成されると同時に、p4からp5までの多角形のエッジがp3からp4までの前のエッジに垂直に方向を決められたように面を生成する。
【0136】
タイプ識別子「A」と傾斜パラメータ値を長さが0であるエッジに割り当てることによって、ドーマーを有するルーフ構造が再現され得る。図19および20を参照すると、タイプ識別子「A」および傾斜パラメータは、長さが0である、p2からp3まで間のエッジに割り当てられ得る。タイプ識別子「s」が、p3からp4までのエッジに割り当てられ得る。タイプ識別子「A」と傾斜パラメータ値が、長さが0である、p4からp5までのエッジに割り当て得る。
【0137】
長さが0である多角形のエッジが、多角形の平面の前のエッジに直交に方向を決められたように処理される慣例を用いて、ドーマーのルーフ面93が再現される。ルーフ面93は、多角形の平面にある、p3からp4までの前のエッジに垂直である線92を通過する。ルーフ面93は、多角形が規定されている平面に対して、p4からp5までのエッジに対して格納された傾斜パラメータ値に従って傾斜される。ルーフ構造のリッジ線94と上部頂点95は、ルーフ構造のパラメータ記述に基づいて生成された面の間の交差線を計算することによって決定され得る。
【0138】
エッジに割り当てられたタイプ識別子に依存して、平面が生成される実施形態が説明され、平面は、多角形が規定されているベース平面に対して傾斜され(タイプ識別子「A」)、または多角形が規定されているベース平面に垂直であり(タイプ識別子「s」)、または多角形が規定されているベース平面内にあり(タイプ識別子「f」)、その一方で、ルーフ構造の記述、並びにその記述を用いる方法およびデバイスはまた、折れ曲がった面を有するより複雑なルーフ構造を規定するために利用され得る。本明細書において使用されるように、折れ曲がったルーフ面は、ベース面に対して異なる傾斜角で傾斜されている複数の上行の平面得を有するルーフ面であるように理解される。これは、図21〜30を参照してより詳しく説明される。
【0139】
図21は、このような折れ曲がったルーフ面102に対する例を例示する。折れ曲がったルーフ面101は、ルーフ構造のベース平面80に対して異なる角度αi,1とαi,2で傾斜された2つの平面103と104を含む。2つの平面103と104が遭遇するエッジ105は、面103の下端側に平行に延在する。
【0140】
折れ曲がったルーフ面102を含むルーフ構造のパラメータ記述において、閉多角形についての情報が格納されている。情報は、閉多角形のエッジ101についての情報を含む。タイプ識別子「A」は、上行のルーフ面がエッジ101から延在することを示すために、エッジ101に対して格納され得る。2つ以上のパラメータ値が、エッジ101に対して格納され得る。エッジ101に対して格納されたパラメータ値は、傾斜角αi,1を表す第1の傾斜パラメータ値と、傾斜角αi,2を表す第2の傾斜パラメータ値と、多角形のエッジ101対して、2つの面103と104との間のエッジ105の位置を表す相対位置パラメータ値とを含み得る。
【0141】
相対位置パラメータ値は、さまざまな形式のうちの1つをとり得る。例示として、ベース平面80から測定されたエッジ105の高さが格納され得る。代替的に、またはさらに、ベース平面80に平行の方向で測定された、多角形のエッジ101に垂直の方向における多角形のエッジ101からのエッジ105の相対位置が格納され得る。代替的に、またはさらに、多角形のエッジ101から、折れ曲がったルーフ面の平面の間のエージ105の距離が格納され得る。平面103の傾斜角αi,1が既知であるので、これらの値のうちの任意の1つは、エッジ105の位置が、エッジ101に対して決定されることを可能にする。
【0142】
図22は、図21の折れ曲がったルーフ面102の側面図である。多角形の下側エッジ101上へのエッジ105の高さhi,1が例示される。この高さは、エッジ101に対する属性としてマップデータベースに格納され得る。平面104の上部リッジ107を特定する情報を格納する必要がない。リッジ107は、折れ曲がったルーフ面102と、ルーフ構造のパラメータ記述によって規定された他の面との間の交差線を計算することによって決定され得る。
【0143】
図23は、2つの折れ曲がったルーフ面および2つの壁面を有する再現されたルーフ構造の概略的透視図である。2つの折れ曲がった上行のルーフ面の下部平面の傾斜角は、ルーフ構造のベース平面に対してα1の値を有し、2つの折れ曲がった壁面の上部平面の傾斜は、ルーフ構造のベース平面に対してα2の値を有する。2つの平面の間のエッジ105は、ルーフ構造のベース平面の上に高さh1において配置される。
【0144】
コーナーポイントp1、・・・p4を有する閉多角形が、ルーフ構造のベース平面において規定される。エッジ101は、折れ曲がったルーフ面の下端側において、p1からp2まで延在する。
【0145】
図24は、図23のルーフ構造のパラメータ記述を提供するデータ23を示す。
【0146】
第1のタイプ識別子「A」は、p1からp2まで延在するエッジと、p3からp4まで延在するエッジとに割り当てられる。3つのパラメータ値は、これらの2つのエッジの各々に対して格納され、2つの傾斜を表す傾斜パラメータ値と、多角形のエッジ101に対するエッジ105の相対位置を表す相対位置パラメータ値とを含む。
【0147】
第2のタイプ識別子「s」は、p2からp3までのエッジと、p4からp1まで延在するエッジとに割り当てられる。
【0148】
データ23のパラメータ記述を用いて、図23のルーフ構造が再現され得る。エッジ105の場所は、p1からp2までのエッジに対して格納されたパラメータ値を用いて決定され得る。リッジ107の場所は、2つの折れ曲がったルーフ面の間の交差線として計算され得る。
【0149】
図25は、2つの折れ曲がった上行のルーフ面と折れ曲がっていない2つの上行のルーフ面とを有する再現されたルーフ構造の概略的透視図である。図26は、ルーフ構造の平面である。
【0150】
折れ曲がったルーフ面の各々は、エッジ112から延在する第1の上行の平面114と第2の上行の平面115とを含む。折れ曲がっていない平面113は、ルーフ構造を記述するために使用される多角形の他のエッジ111から延在する。
【0151】
折れ曲がったルーフ面の下部平面114の傾斜角は、ルーフ構造のベース平面に対してα1の値を有し、折れ曲がったルーフ面の上部平面115の傾斜は、ルーフ構造のベース平面に対してα2の値を有する。折れ曲がったルーフ面の2つの平面の間のエッジは、ルーフ構造のベースの上に高さh1において配置される。平面113はまた、ベース平面に対してα1の傾斜を有するように仮定される。
【0152】
コーナーポイントp1、・・・p4を有する閉多角形が、ルーフ構造のベース平面において規定されている。多角形のエッジ111は、折れ曲がっていない上行のルーフ面の下端側においてp1からp2まで延在する。多角形のエッジ112は、折れ曲がった上行のルーフ面の下端側においてp4からp1まで延在する。
【0153】
図27は、図25および26のルーフ構造のパラメータ記述を提供するデータ23を示す。
【0154】
第1のタイプ識別子「A」は、多角形のエッジの各々に割り当てられる。折れ曲がっていない上行のルーフ面の傾斜を示す1つのパラメータ値は、それぞれ、p1からp2まで延在するエッジ、およびp3からp4まで延在するエッジに対して格納される。3つのパラメータ値は、それぞれ、p2からp3までのエッジ、およびp4からp1までのエッジに対して格納される。3つのパラメータ値は、2つの傾斜を表す傾斜パラメータ値と、多角形のエッジ112に対する、折れ曲がった面の2つの平面の間のエッジの相対位置を表す相対位置パラメータ値とを含む。
【0155】
データ23のパラメータ記述を用いて、図25のルーフ構造が再現され得る。上行のルーフ面の間のすべてのエッジの場所が、パラメータ記述を用いて決定され得る。この目的のために、面の間の交差線が決定され得る。例えば、リッジ線116の位置を別個のパラメータとして格納する必要がない。
【0156】
ルーフ構造を再現するときに、ナビゲーションデバイス1の処理デバイス2は、多角形のエッジがタイプ識別子「A」を有するか否かに基づいて、次にそれぞれのエッジに対して格納されたパラメータの数にさらに基づいて、上行のルーフ面が折れ曲がったルーフ面であるか否かを決定し得る。
【0157】
タイプ識別子およびパラメータ値が多角形のエッジに割り当てられる、ルーフ構造のパラメータ記述を用いて、より複雑なルーフ構造さえも格納され得る。例示として、バロック時代の教会タワーの建物で見つけられるようなオニオン型のドーム構造が格納され得る。
【0158】
図28は、このようなオニオン型のルーフ構造の平面図であり、図29は、オニオン型ドームの中心軸119を通る断面図である。ルーフ構造は、本明細書において説明されたパラメータ記述を用いて、折れ曲がったルーフ面の点から記述され得る。
【0159】
オニオン型のルーフ構造は、中心軸119に対して30°回転の対称である。12個のエッジを有する正多角形が規定され得る。多角形の12個のエッジは、オニオン型のルーフ構造の基礎伏図を表す。多角形のエッジの各々に対して、第1のタイプ識別子「A」および複数のパラメータ値がデータベースに格納され得る。複数のパラメータ値は、例えば、ベース平面に対する複数の平面の傾斜角も、平面の上部および下部エッジの相対位置を定量化する情報も示し得る。
【0160】
図29を参照すると、多角形のポイントp1とp2との間のエッジから上向きに延在する最も低い平面は、ベース平面に対して傾斜角α1を有する。最も低い平面は、h1の高さにわたって上向きに延在する。隣接する平面は、高さh1において延在するエッジから、ベース平面に対して傾斜角α2で上向きに延在する。この平面は、h2の全高さで上向きに延在する。対応するパラメータは、オニオン型のルーフ構造の上部ポイントに向かって配置されている、隣接する平面の各々に対して規定され得る。それによって、7つの傾斜角α1、・・・、α2の全部が規定され得る。同様に、6個の高さh1、・・・、h6の全部が規定され得る。折れ曲がったルーフ面の最も上の平面の高さh7が、異なる折れ曲がったルーフ面を交差することによって断定され得るので、この高さを別個に格納する必要がない。
【0161】
オニオン型のドーム構造の対称性のために、これらの傾斜角パラメータおよび高さは、多角形の12個のエッジの各々に対して同じである。
【0162】
図30は、オニオン型のドーム構造のパラメータ記述を提供するデータ23を示す。
【0163】
第1のタイプ識別子「A」は、多角形のエッジの各々に割り当てられる。さらに、複数のパラメータ値が、多角形のエッジの各々に対して格納される。パラメータ値は、7つの傾斜角α1、・・・、α7を表す傾斜パラメータ値と、折れ曲がったルーフ面の異なる平面が互いに接するエッジの間の相対位置を表す相対位置パラメータ値h1、・・・、h6と含む。
【0164】
データ23のパラメータ記述を用いて、オニオン型のドーム構造が再現され得る。さまざまな上行のルーフ面の間のすべてのエッジの場所が、パラメータ記述を用いて決定され得る。
【0165】
ルーフ構造を再現するときに、ナビゲーションデバイス1の処理デバイス2は、それぞれのエッジに対して格納されたタイプ識別子「A」とパラメータの数とに基づいて、全部の上行のルーフ面が折れ曲がった面であることを決定し得る。
【0166】
3Dルーフ構造を出力するための方法およびデバイスが、代表的なルーフ構造を参照して説明され、かつ例示されている。説明されたさまざまな原理は、ルーフ構造のパラメータ記述に基づいて光学出力を生成するときだけではなく、ルーフ構造のこのようなパラメータ記述を含むデータベースを生成するときにも利用され得る。
【0167】
図31は、データベースを生成する方法120のフローチャートを示す。データベースは、閉多角形のエッジに割り当てられたタイプ識別子を有する、ルーフ構造のパラメータ記述を含むように生成される。
【0168】
121において、ルーフ構造を表すデータが検索され、少なくとも1つの多角形が規定される。データは、ルーフ構造の平面についての情報を既に含む事前処理されたデータであり得る。代替的には、データはまた、ルーフ構造の平面を決定するように次に事前に処理される未処理データであり得る。閉多角形は、ルーフ構造を表すデータに基づいて、特に平面内のルーフ構造のセグメンテーションに基づいて規定され得る。ルーフ構造が1つ以上の平らなルーフを含む場合に、各平らなルーフを囲むエッジを有する閉多角形が、それぞれ、規定され得る。
【0169】
122において、多角形のエッジにわたる反復が初期化される。
【0170】
123において、多角形のi番目のエッジが上行のルーフ面の下端側上に配置されているか否かが決定される。エッジが上行のルーフ面の下端側上に配置されている場合に、124において、エッジに対するタイプ識別子が、値「A」を有するように設定される。125において、1つ以上のパラメータ値が決定される。パラメータ値は、多角形のエッジiが延在するルーフ面の傾斜角を示す少なくとも1つの傾斜パラメータを含む。次に、方法は、130へ進む。
【0171】
123において、i番目のエッジが上行のルーフ面の下端側上に配置されていないことが決定された場合に、方法は、126へ進む。126において、エッジが、ルーフ面を支持するための上行の壁エッジを有する壁面上に延在するか否かが決定される。エッジが壁面上に延在する場合に、127において、エッジに対するタイプ識別子が値「s」を有するように設定される。次に、方法は、130へ進む。
【0172】
126において、多角形のi番目のエッジが、上行の壁エッジを有する壁面上に延在していないことが決定された場合に、方法は、128へ進む。128において、エッジが、平らなルーフの側に沿って延在するか否かが決定される。エッジが平らなルーフの側に沿って延在する場合に、128において、エッジに対するタイプ識別子が、値「f」を有するように設定される。次に、方法は、130へ進む。
【0173】
130において、タイプ識別子と、適用可能なら、パラメータ値との割り当てが閉多角形のすべてのエッジに対して行われたか否かが決定される。i番目のエッジが最後のエッジではない場合に、131において、エッジ索引が増分される。方法は、123に戻る。
【0174】
タイプ識別子と、適用可能なら、パラメータ値とが閉多角形のすべてのエッジに対して割り当てられていることが決定された場合に、エッジ、エッジに割り当てたタイプ識別子、およびパラメータ値についての情報が、データベースに格納される。
【0175】
121において、2つ以上の多角形が規定された場合に、手順122〜132が、多角形の各々に対して繰り返され得る。
【0176】
図31の方法を用いて生成されたマップデータベースは、実施形態に従って、ナビゲーションデバイスにおいて使用され得る。
【0177】
実施形態に従うデバイスおよび方法が、詳細に説明されたが、変更が他の実施形態において実装され得る。例示として、3つのタイプ識別子を用いる実施形態が説明されるが、別の数のタイプ識別子、または他の意味を有するタイプ識別子が使用され得る。例示として、平らなルーフに対して別個のタイプ識別子を規定するではなく、むしろタイプ識別子「A」と0°の傾斜パラメータ値とを有するルーフ面が平らなルーフに対応する慣例が利用され得る。さらなる実施形態において、4つ以上のタイプ識別子が使用され得る。例示として、別個のタイプ識別子は、折れ曲がっている上行のルーフ面に対して導入され得る。
【0178】
本発明の実施形態が、ナビゲーションデバイスに対して使用され得る。しかしながら、さらなる局面および実施形態に従って、タイプ識別子が、それぞれ、閉多角形のエッジに割り当てられているルーフ構造のパラメータ記述は、3D都市モデルが出力されるべきである他のアプリケーションにおいても使用され得る。
【符号の説明】
【0179】
1 ナビゲーションデバイス
2 処理デバイス
3 記憶デバイス
4 出力インターフェース
5 入力インターフェース
【特許請求の範囲】
【請求項1】
ナビゲーションデバイスであって、該ナビゲーションデバイスは、
光学出力デバイス(4)と、
3次元ルーフ構造を規定するデータ(21,22,23)を格納するデータベース(3;20)と、
該データベース(3;20)に連結された処理デバイス(2)と
を含み、
該処理デバイス(2)は、該データベース(3;20)から3次元ルーフ構造を規定するデータ(21,22,23)を検索することと、該検索されたデータ(21,22,23)に基づいて該3次元ルーフ構造を再現することと、該再現されたルーフ構造を表示するように該光学出力デバイス(4)を制御することとを行うように構成されており、
該検索されたデータ(21,22,23)は、少なくとも1つの閉多角形のエッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)の各々に対して該データベース(3;20)にそれぞれに格納されたタイプ識別子とについての情報を含み、該タイプ識別子の各々は、それぞれ、タイプ識別子の有限集合から選択され、該処理デバイス(2)は、該ルーフ構造を再現するために、複数の平面(55−57;82,84;93;103,104;113,114)を決定するように構成されており、該平面(55−57;82,84;93;103,104;113,114)の各々が該多角形のエッジ(64,65;75−78;81,83;101;111,112)を通過し、該エッジに対して格納された該タイプ識別子に基づいて決定された向きを有するように、該平面(55−57;82,84;93;103,104;113,114)の各々が、それぞれに決定される、ナビゲーションデバイス。
【請求項2】
前記タイプ識別子の有限集合は、少なくとも、上行のルーフ面に対する第1のタイプ識別子と、ベース平面に垂直に方向を決められている平面に対する第2のタイプ識別子とを含む、請求項1に記載のナビゲーションデバイス。
【請求項3】
前記検索されたデータ(21,22,23)は、少なくとも前記エッジ(64,65;75−78;81,83;101;111,112)の一部に対するパラメータ値を含み、該パラメータ値の各々は、それぞれ、前記多角形の該エッジ(64,65;75−78;81,83;101;111,112)のうちの1つに関連付けられて格納されており、
前記処理デバイス(2)は、該パラメータ値に基づいて前記ルーフ構造を再現するようにさらに構成されている、請求項1または2に記載のナビゲーションデバイス。
【請求項4】
前記処理デバイス(2)は、前記ルーフ構造を再現するときに、第1のタイプ識別子が前記データベース(3;20)に格納されている前記多角形のエッジ(64;81,83;101;111,112)を識別することと、該識別されたエッジ(64;81,83;101;111,112)に対して少なくとも1つの傾斜パラメータ値を検索することと、平面(55;82,84;93;103;113,114)を有する傾斜のルーフ面を生成することとを行うように構成されており、該平面(55;82,84;93;103;113,114)は、該識別されたエッジ(64;81,83;101;111,112)を通過し、かつ該傾斜パラメータ値によって規定された傾斜を有する、請求項3に記載のナビゲーションデバイス。
【請求項5】
前記処理デバイス(2)は、前記第1のタイプ識別子が前記データベース(3;20)に格納されている前記多角形の第2のエッジ(83;111)を識別することと、該識別された第2のエッジ(83;111)に対して第2の傾斜パラメータ値を検索することと、前記ルーフ面と第2のルーフ面との間の交差線を計算することとを行うように構成されており、該第2のルーフ面は、該第2のエッジ(83;111)を通過し、かつ該第2の傾斜パラメータ値によって規定された傾斜を有する第2の平面(84;113)を含む、請求項4に記載のナビゲーションデバイス。
【請求項6】
前記処理デバイス(2)は、さらなる傾斜パラメータ値が前記識別されたエッジ(101;112)に対して格納されるか否かを決定することと、さらなる傾斜パラメータ値が該識別されたエッジ(101;112)に対して格納されている場合に、さらなる平面(104;105)を有する折れ曲がったルーフ面(102;114,115)として前記ルーフ面を生成することとを行うように構成されており、該さらなる平面(104;115)は、前記多角形の前記識別されたエッジ(101;112)に平行し、かつ該さらなる傾斜パラメータ値によって規定されたさらなる傾斜を有する、請求項4に記載のナビゲーションデバイス。
【請求項7】
前記処理デバイス(2)は、第2のタイプ識別子が前記データベース(3;20)に格納されている前記多角形のエッジ(65)を識別することと、前記ルーフ構造が、ベース平面(80)に垂直に方向を決められている平面(56)を含み、該識別されたエッジ(65)を通過し、そして該ベース平面に対して傾斜された上行の壁エッジ(67,69)を有するように、該ルーフ構造を再現することとを行うように構成されている、請求項1または2に記載のナビゲーションデバイス。
【請求項8】
前記処理デバイス(2)は、前記上行の壁エッジ(67,69)を計算するために、平面(56)とさらなる平面(55)との間の交差線を計算するように構成されており、該平面(56)は、前記識別されたエッジ(65)を通過し、かつ前記ベース平面(80)に垂直であり、該さらなる平面(55)は、該識別されたエッジ(65)に隣接する前記多角形の別のエッジ(64)を通過し、かつ該ベース平面(80)に対して傾斜されている、請求項7に記載のナビゲーションデバイス。
【請求項9】
前記処理デバイス(2)は、第3のタイプ識別子が前記データベース(3;20)に格納されている前記多角形のエッジ(75−78)を識別することと、前記ルーフ構造が、該多角形の該識別されたエッジ(75−78)によって囲まれた平らなルーフ(57)を含むように該ルーフ構造を再現することとを行うように構成されている、請求項1または2に記載のナビゲーションデバイス。
【請求項10】
前記タイプ識別子の有限集合は、3つ以下の異なるタイプ識別子を含む、請求項1または2に記載のナビゲーションデバイス。
【請求項11】
前記多角形は、前記ルーフ構造のベース平面(80)に配置されている、請求項1または2に記載のナビゲーションデバイス。
【請求項12】
前記データベース(3;20)は、関係型データベース(3;20)である、請求項1または2に記載のナビゲーションデバイス。
【請求項13】
ナビゲーションデバイス(1)の光学出力デバイス(4)を介して3次元ルーフ構造を出力する方法であって、該方法は、
データベース(3;20)から、3次元ルーフ構造を表すデータ(21,22,23)を検索することであって、該検索されたデータ(21,22,23)は、少なくとも1つの閉多角形のエッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)の各々に対して該データベース(3;20)にそれぞれに格納されたタイプ識別子とについての情報を含み、該タイプ識別子の各々が、タイプ識別子の有限集合から選択される、ことと、
該エッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)に対する該タイプ識別子とについての該情報に基づいて該3次元ルーフ構造を再現することであって、複数の平面(55−57;82,84;93;103,104;113,114)が決定されており、その結果、該それぞれの平面は、該多角形のエッジ(64,65;75−78;81,83;101;111,112)を通過し、かつ該エッジ(64,65;75−78;81,83;101;111,112)に対して格納された該タイプ識別子に基づいて決定された向きを有する、ことと、
該再現されたルーフ構造を表示するように、該光学出力デバイス(4)を制御することと
を含む、方法。
【請求項14】
前記方法は、請求項1または2に記載のナビゲーションデバイスによって行われる、請求項13に記載の方法。
【請求項15】
ルーフ構造のパラメータ記述を含む車両ナビゲーションデータベース(3;20)を生成する方法であって、該方法は、
3次元ルーフ構造を表すデータを検索することと、
該データに基づいて、該ルーフ構造のベース平面(80)の複数のエッジ(64,65;75−78;81,83;101;111,112)を含む少なくとも1つの閉多角形を識別することと、
該複数のエッジ(64,65;75−78;81,83;101;111,112)の各エッジに対して、
該ルーフ構造のルーフ面に対する該エッジ(64,65;75−78;81,83;101;111,112)の位置に基づいて、タイプ識別子の有限集合から選択されたタイプ識別子を該エッジ(64,65;75−78;81,83;101;111,112)に割り当てることと、
該割り当てられたタイプ識別子に基づいて、該データから、該それぞれのエッジ(64,65;75−78;81,83;101;111,112)に対してパラメータ値を選択的に決定することと
を行うことと、
該多角形の該エッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)の各々に割り当てられた該タイプ識別子とについての情報を該データベース(3;20)に格納することと
を含む、方法。
【請求項16】
前記タイプ識別子の集合は、第1のタイプ識別子と、第2のタイプ識別子と、第3のタイプ識別子とを含み、
エッジ(64;81,83;101;111,112)が傾斜のルーフ面(55;82,84;93;103;113,114)の下端側に沿って延在する場合に、該第1のタイプ識別子が、前記多角形の該エッジに割り当てられ、
エッジ(65)が、上行のルーフ面(55)を支持するための上行の壁エッジ(67,69)を有する壁面(57)にわたって延在する場合に、該第2のタイプ識別子が、該多角形の該エッジ(65)に割り当てられ、
エッジ(75−78)が平らなルーフ面(57)の側に沿って延在する場合に、該第3のタイプ識別子が、該多角形の該エッジ(75−78)に割り当てられる、請求項15に記載の方法。
【請求項1】
ナビゲーションデバイスであって、該ナビゲーションデバイスは、
光学出力デバイス(4)と、
3次元ルーフ構造を規定するデータ(21,22,23)を格納するデータベース(3;20)と、
該データベース(3;20)に連結された処理デバイス(2)と
を含み、
該処理デバイス(2)は、該データベース(3;20)から3次元ルーフ構造を規定するデータ(21,22,23)を検索することと、該検索されたデータ(21,22,23)に基づいて該3次元ルーフ構造を再現することと、該再現されたルーフ構造を表示するように該光学出力デバイス(4)を制御することとを行うように構成されており、
該検索されたデータ(21,22,23)は、少なくとも1つの閉多角形のエッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)の各々に対して該データベース(3;20)にそれぞれに格納されたタイプ識別子とについての情報を含み、該タイプ識別子の各々は、それぞれ、タイプ識別子の有限集合から選択され、該処理デバイス(2)は、該ルーフ構造を再現するために、複数の平面(55−57;82,84;93;103,104;113,114)を決定するように構成されており、該平面(55−57;82,84;93;103,104;113,114)の各々が該多角形のエッジ(64,65;75−78;81,83;101;111,112)を通過し、該エッジに対して格納された該タイプ識別子に基づいて決定された向きを有するように、該平面(55−57;82,84;93;103,104;113,114)の各々が、それぞれに決定される、ナビゲーションデバイス。
【請求項2】
前記タイプ識別子の有限集合は、少なくとも、上行のルーフ面に対する第1のタイプ識別子と、ベース平面に垂直に方向を決められている平面に対する第2のタイプ識別子とを含む、請求項1に記載のナビゲーションデバイス。
【請求項3】
前記検索されたデータ(21,22,23)は、少なくとも前記エッジ(64,65;75−78;81,83;101;111,112)の一部に対するパラメータ値を含み、該パラメータ値の各々は、それぞれ、前記多角形の該エッジ(64,65;75−78;81,83;101;111,112)のうちの1つに関連付けられて格納されており、
前記処理デバイス(2)は、該パラメータ値に基づいて前記ルーフ構造を再現するようにさらに構成されている、請求項1または2に記載のナビゲーションデバイス。
【請求項4】
前記処理デバイス(2)は、前記ルーフ構造を再現するときに、第1のタイプ識別子が前記データベース(3;20)に格納されている前記多角形のエッジ(64;81,83;101;111,112)を識別することと、該識別されたエッジ(64;81,83;101;111,112)に対して少なくとも1つの傾斜パラメータ値を検索することと、平面(55;82,84;93;103;113,114)を有する傾斜のルーフ面を生成することとを行うように構成されており、該平面(55;82,84;93;103;113,114)は、該識別されたエッジ(64;81,83;101;111,112)を通過し、かつ該傾斜パラメータ値によって規定された傾斜を有する、請求項3に記載のナビゲーションデバイス。
【請求項5】
前記処理デバイス(2)は、前記第1のタイプ識別子が前記データベース(3;20)に格納されている前記多角形の第2のエッジ(83;111)を識別することと、該識別された第2のエッジ(83;111)に対して第2の傾斜パラメータ値を検索することと、前記ルーフ面と第2のルーフ面との間の交差線を計算することとを行うように構成されており、該第2のルーフ面は、該第2のエッジ(83;111)を通過し、かつ該第2の傾斜パラメータ値によって規定された傾斜を有する第2の平面(84;113)を含む、請求項4に記載のナビゲーションデバイス。
【請求項6】
前記処理デバイス(2)は、さらなる傾斜パラメータ値が前記識別されたエッジ(101;112)に対して格納されるか否かを決定することと、さらなる傾斜パラメータ値が該識別されたエッジ(101;112)に対して格納されている場合に、さらなる平面(104;105)を有する折れ曲がったルーフ面(102;114,115)として前記ルーフ面を生成することとを行うように構成されており、該さらなる平面(104;115)は、前記多角形の前記識別されたエッジ(101;112)に平行し、かつ該さらなる傾斜パラメータ値によって規定されたさらなる傾斜を有する、請求項4に記載のナビゲーションデバイス。
【請求項7】
前記処理デバイス(2)は、第2のタイプ識別子が前記データベース(3;20)に格納されている前記多角形のエッジ(65)を識別することと、前記ルーフ構造が、ベース平面(80)に垂直に方向を決められている平面(56)を含み、該識別されたエッジ(65)を通過し、そして該ベース平面に対して傾斜された上行の壁エッジ(67,69)を有するように、該ルーフ構造を再現することとを行うように構成されている、請求項1または2に記載のナビゲーションデバイス。
【請求項8】
前記処理デバイス(2)は、前記上行の壁エッジ(67,69)を計算するために、平面(56)とさらなる平面(55)との間の交差線を計算するように構成されており、該平面(56)は、前記識別されたエッジ(65)を通過し、かつ前記ベース平面(80)に垂直であり、該さらなる平面(55)は、該識別されたエッジ(65)に隣接する前記多角形の別のエッジ(64)を通過し、かつ該ベース平面(80)に対して傾斜されている、請求項7に記載のナビゲーションデバイス。
【請求項9】
前記処理デバイス(2)は、第3のタイプ識別子が前記データベース(3;20)に格納されている前記多角形のエッジ(75−78)を識別することと、前記ルーフ構造が、該多角形の該識別されたエッジ(75−78)によって囲まれた平らなルーフ(57)を含むように該ルーフ構造を再現することとを行うように構成されている、請求項1または2に記載のナビゲーションデバイス。
【請求項10】
前記タイプ識別子の有限集合は、3つ以下の異なるタイプ識別子を含む、請求項1または2に記載のナビゲーションデバイス。
【請求項11】
前記多角形は、前記ルーフ構造のベース平面(80)に配置されている、請求項1または2に記載のナビゲーションデバイス。
【請求項12】
前記データベース(3;20)は、関係型データベース(3;20)である、請求項1または2に記載のナビゲーションデバイス。
【請求項13】
ナビゲーションデバイス(1)の光学出力デバイス(4)を介して3次元ルーフ構造を出力する方法であって、該方法は、
データベース(3;20)から、3次元ルーフ構造を表すデータ(21,22,23)を検索することであって、該検索されたデータ(21,22,23)は、少なくとも1つの閉多角形のエッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)の各々に対して該データベース(3;20)にそれぞれに格納されたタイプ識別子とについての情報を含み、該タイプ識別子の各々が、タイプ識別子の有限集合から選択される、ことと、
該エッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)に対する該タイプ識別子とについての該情報に基づいて該3次元ルーフ構造を再現することであって、複数の平面(55−57;82,84;93;103,104;113,114)が決定されており、その結果、該それぞれの平面は、該多角形のエッジ(64,65;75−78;81,83;101;111,112)を通過し、かつ該エッジ(64,65;75−78;81,83;101;111,112)に対して格納された該タイプ識別子に基づいて決定された向きを有する、ことと、
該再現されたルーフ構造を表示するように、該光学出力デバイス(4)を制御することと
を含む、方法。
【請求項14】
前記方法は、請求項1または2に記載のナビゲーションデバイスによって行われる、請求項13に記載の方法。
【請求項15】
ルーフ構造のパラメータ記述を含む車両ナビゲーションデータベース(3;20)を生成する方法であって、該方法は、
3次元ルーフ構造を表すデータを検索することと、
該データに基づいて、該ルーフ構造のベース平面(80)の複数のエッジ(64,65;75−78;81,83;101;111,112)を含む少なくとも1つの閉多角形を識別することと、
該複数のエッジ(64,65;75−78;81,83;101;111,112)の各エッジに対して、
該ルーフ構造のルーフ面に対する該エッジ(64,65;75−78;81,83;101;111,112)の位置に基づいて、タイプ識別子の有限集合から選択されたタイプ識別子を該エッジ(64,65;75−78;81,83;101;111,112)に割り当てることと、
該割り当てられたタイプ識別子に基づいて、該データから、該それぞれのエッジ(64,65;75−78;81,83;101;111,112)に対してパラメータ値を選択的に決定することと
を行うことと、
該多角形の該エッジ(64,65;75−78;81,83;101;111,112)と、該エッジ(64,65;75−78;81,83;101;111,112)の各々に割り当てられた該タイプ識別子とについての情報を該データベース(3;20)に格納することと
を含む、方法。
【請求項16】
前記タイプ識別子の集合は、第1のタイプ識別子と、第2のタイプ識別子と、第3のタイプ識別子とを含み、
エッジ(64;81,83;101;111,112)が傾斜のルーフ面(55;82,84;93;103;113,114)の下端側に沿って延在する場合に、該第1のタイプ識別子が、前記多角形の該エッジに割り当てられ、
エッジ(65)が、上行のルーフ面(55)を支持するための上行の壁エッジ(67,69)を有する壁面(57)にわたって延在する場合に、該第2のタイプ識別子が、該多角形の該エッジ(65)に割り当てられ、
エッジ(75−78)が平らなルーフ面(57)の側に沿って延在する場合に、該第3のタイプ識別子が、該多角形の該エッジ(75−78)に割り当てられる、請求項15に記載の方法。
【図1】


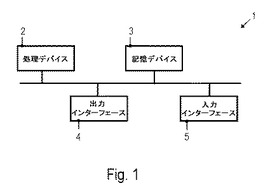
【図2】
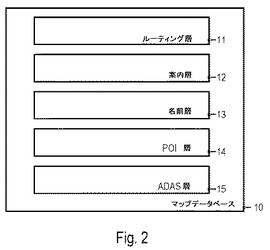
【図3】
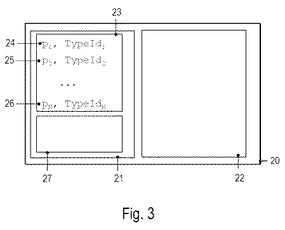
【図4】
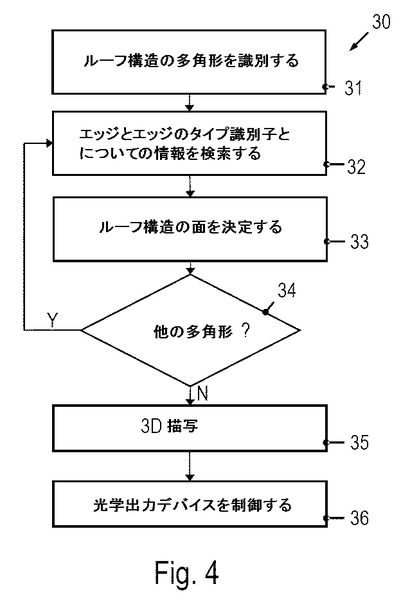
【図5】
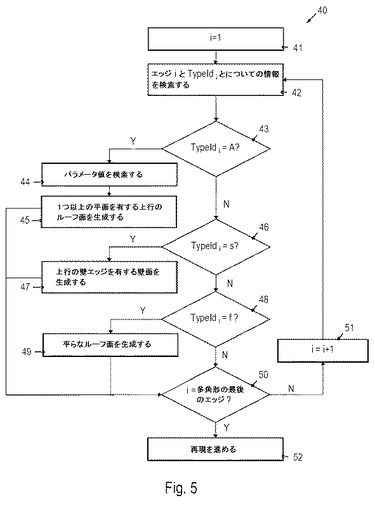
【図8】
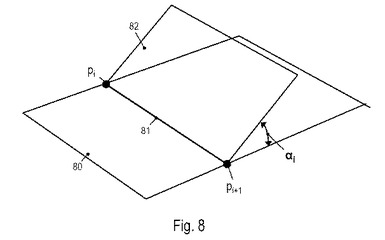
【図9】
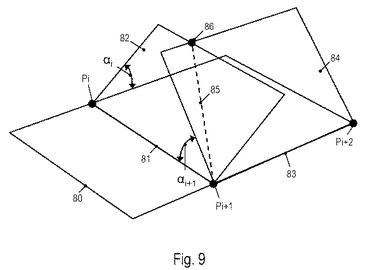
【図10】
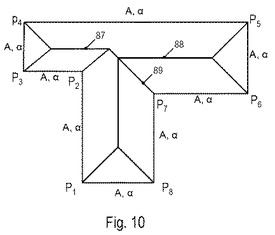
【図11】
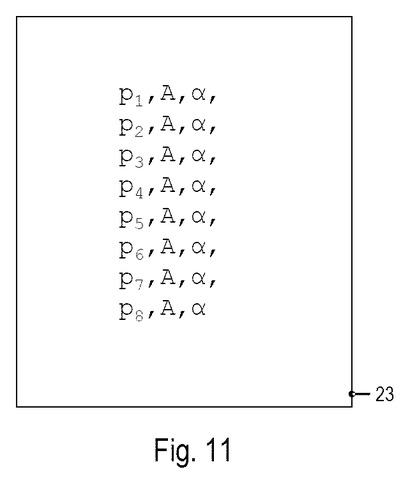
【図12】
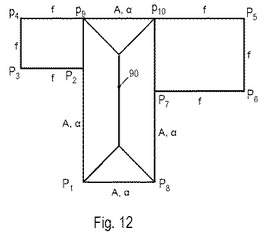
【図13】
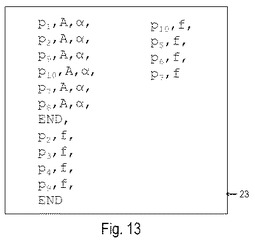
【図14】
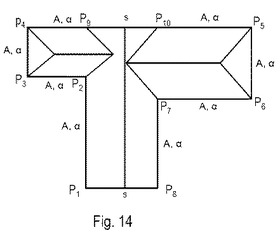
【図15】
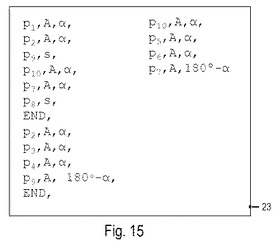
【図16】
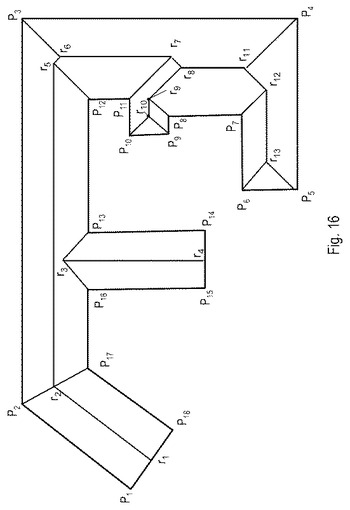
【図17】
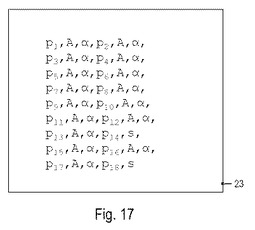
【図18】
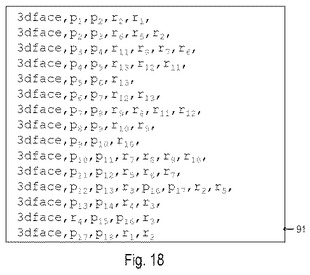
【図20】
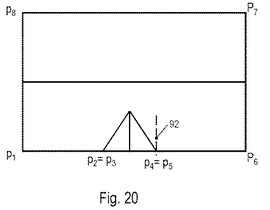
【図21】
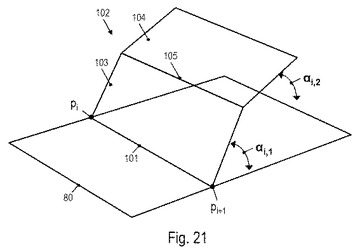
【図22】
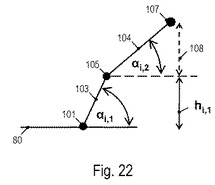
【図23】
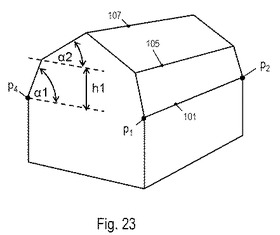
【図24】
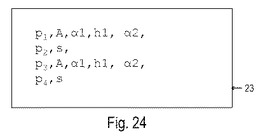
【図26】
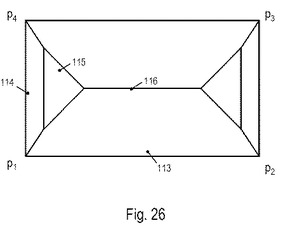
【図27】
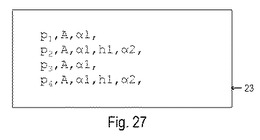
【図28】
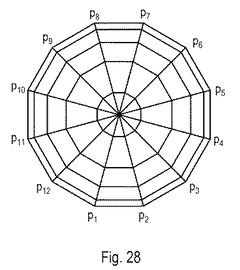
【図29】
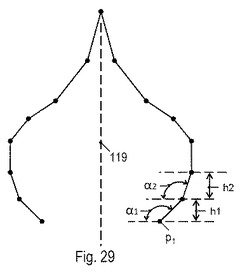
【図30】
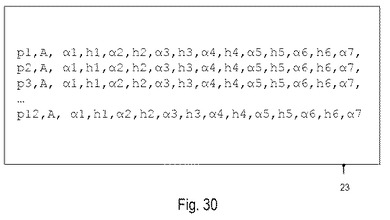
【図31】
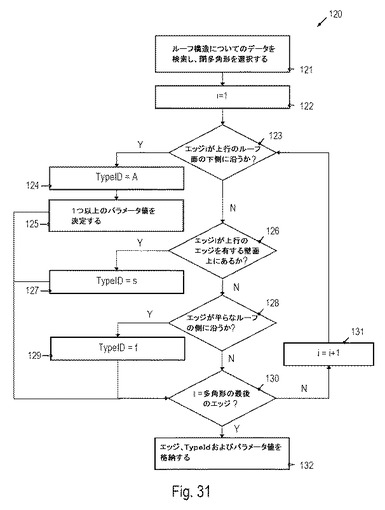
【図6】
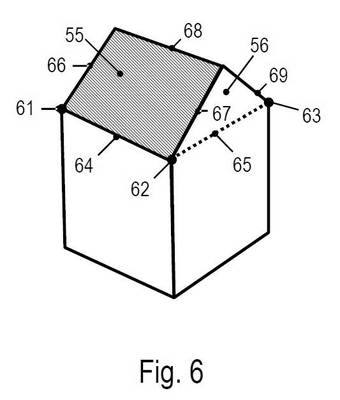
【図7】
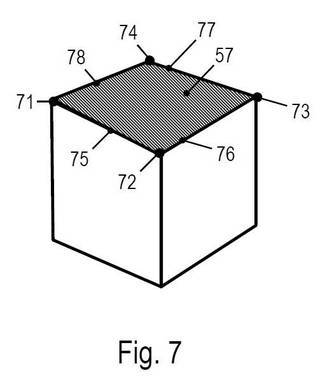
【図19】
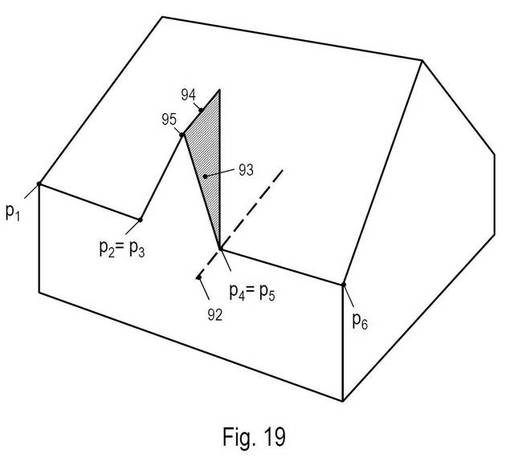
【図25】
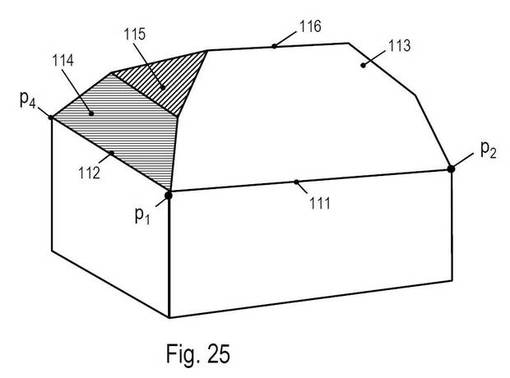
【図2】
【図3】
【図4】
【図5】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図20】
【図21】
【図22】
【図23】
【図24】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図6】
【図7】
【図19】
【図25】
【公開番号】特開2012−221491(P2012−221491A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2012−63763(P2012−63763)
【出願日】平成24年3月21日(2012.3.21)
【出願人】(504147933)ハーマン ベッカー オートモーティブ システムズ ゲーエムベーハー (165)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成24年3月21日(2012.3.21)
【出願人】(504147933)ハーマン ベッカー オートモーティブ システムズ ゲーエムベーハー (165)
【Fターム(参考)】
[ Back to top ]