
3次元座標測定方法
【課題】2つのカメラによる被測定点の対応付けを容易とする3次元座標測定方法を提供する。
【解決手段】被測定点を撮影し画像情報を出力する第1及び第2撮像手段1と、該撮像手段を2自由度以上回転運動させるアクチュエータ2と、撮像手段の回転角を測定する回転角センサとを有する測定装置を用いる。この装置により、まず、第1撮像手段を用いて被測定点の座標を近似計算する。そして近似計算の誤差範囲内で第2撮像手段からの画像情報を用いて被測定点を検出する。この検出された被測定点に第1及び第2撮像手段の注視線を合わせる。そして、合わせた撮像手段の回転角センサで測定される回転角を用いて三角測量の原理により被測定点の3次元座標を算出する。
【解決手段】被測定点を撮影し画像情報を出力する第1及び第2撮像手段1と、該撮像手段を2自由度以上回転運動させるアクチュエータ2と、撮像手段の回転角を測定する回転角センサとを有する測定装置を用いる。この装置により、まず、第1撮像手段を用いて被測定点の座標を近似計算する。そして近似計算の誤差範囲内で第2撮像手段からの画像情報を用いて被測定点を検出する。この検出された被測定点に第1及び第2撮像手段の注視線を合わせる。そして、合わせた撮像手段の回転角センサで測定される回転角を用いて三角測量の原理により被測定点の3次元座標を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は3次元座標測定方法に関し、特に、複数のカメラを用いる座標測定装置において各カメラで共通の対応する被測定点を検出して三角測量の原理により座標を測定する3次元座標測定方法に関する。
【背景技術】
【0002】
従来から、2つのカメラを用いて被測定点の位置座標を測定する装置や方法が種々開発されている。これらは、通常、既知の2ヶ所の位置に配置された2つのカメラによって被測定点を撮影し、各カメラの視線を被測定点に合わせ、カメラの回転角度から三角測量の原理を用いて被測定点の座標を算出するものである。
【0003】
ここで、2つのカメラが独立に動作する場合、三角測量の原理を用いて座標を算出するためには、2つのカメラで対応する共通の被測定点を確実に撮影する必要がある。2つのカメラ間がある程度近い場合には、共通の被測定点を検出して撮影することもある程度容易であるが、三角測量の原理上、カメラ間の距離は広いほうが算出された座標の誤差は少ない。したがって、測定精度のことを考えるとカメラ間は離すほうが望ましい。
【0004】
また、被測定点の座標の測定精度を増すために、カメラにズーム機能を設けたものもある(特許文献1)。これは、被測定点にカメラを向けて、さらにズーム機能でズームインして画像を拡大するものである。
【0005】
【特許文献1】特開平6−79671号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、従来の独立して動作する2つのカメラを用いた座標測定方法においては、測定精度を上げるために2つのカメラ間の距離を離した場合、一方のカメラで撮影した被測定点を他方のカメラで撮影するのは難しいという問題がある。一方のカメラで撮影している被測定点の位置が分からないため、他方のカメラで対応点を探すのには、すべての領域において例えば微分法による対応点の検索等が行なわれており、非常に時間がかかるものであった。これは特に遠方の被測定点を測定する場合に顕著な問題となる。一方のカメラで撮影している被測定点と他方のカメラで撮影している被測定点が異なる点であると、正しい座標を算出できなくなってしまう。対応する被測定点を求めるのには非常に多くの計算が必要になり処理時間がかかるため、被測定点が移動体の一部である場合にはリアルタイムに座標を算出するようなことは特に難しかった。
【0007】
また、ズーム機能を用いて被測定点を高解像度で撮影して測定精度を向上する例では、ズーム機能を狭角側にした場合にカメラの画角が狭くなる。遠方の被測定点に対してズームインした場合等にはかなり画角が狭くなってしまうが、このような狭い画角のカメラを用いて共通の対応する被測定点を撮影することは、さらに困難であった。
【0008】
本発明は、斯かる実情に鑑み、2つのカメラによる被測定点の対応付けを容易とする3次元座標測定方法を提供しようとするものである。
【課題を解決するための手段】
【0009】
上述した本発明の目的を達成するために、本発明による3次元座標測定方法は、被測定点を撮影し画像情報を出力する第1及び第2撮像手段と、該撮像手段を2自由度以上回転運動させるアクチュエータと、撮像手段の回転角を測定する回転角センサとを有する測定装置により、第1撮像手段を用いて被測定点の座標を近似計算する過程と、近似計算の誤差範囲内で第2撮像手段からの画像情報を用いて被測定点を検出する過程と、第1及び第2撮像手段の注視線を、アクチュエータを用いて検出された被測定点に合わせる過程と、回転角センサで測定される回転角を用いて三角測量の原理により被測定点の3次元座標を算出する過程とを具備するものである。
【0010】
さらに、被測定点を検出する過程は、近似計算の誤差範囲が第2撮像手段の視野から外れているときには、第2撮像手段の視野内に誤差範囲が入るようにアクチュエータを制御する。
【0011】
また、被測定点を検出する過程は、近似計算の誤差範囲が第2撮像手段の視野よりも大きいときには、第2撮像手段の視野が誤差範囲内を探索するようにアクチュエータを制御する。
【0012】
ここで、近似計算する過程は、第1撮像手段の光軸を振動させ、そのときに出力される複数枚の画像情報から三角測量の原理により座標を近似計算することでも実現可能である。
【0013】
また、近似計算する過程は、被測定点に第1撮像手段のピントを合わせたときの焦点距離を用いても良い。
【0014】
また、撮像手段はズーム機能を有し、該ズーム機能の広角側で撮像手段の注視線を被測定点に合わせた後に、ズーム機能の狭角側で撮像手段の注視線を被測定点に再度合わせるようにしても良い。
【0015】
さらに、第1及び第2撮像手段を載置する基盤を1自由度以上回転又は並進運動させるようにしても良い。
【0016】
そして、基盤の回転角や回転加速度、並進加速度等を測定するようにしても良い。これら基盤の回転角、回転加速度又は並進加速度と、回転角センサからの撮像手段の回転角とを用いて、基盤の回転又は並進運動により生ずる画像情報のずれを補償するために、アクチュエータで撮像手段の視野を制御するようにしても良い。また、基盤の水平度を測定するようにしても良い。
【0017】
さらにまた、第1及び第2撮像手段よりも画角の広い広角撮像手段を用いて被測定点を撮影するようにしても良い。
【0018】
また、広角撮像手段は、第1撮像手段と第2撮像手段とを結ぶ線の略中心近傍に設けられれば良い。
【0019】
さらに、第1及び第2撮像手段の間の距離を調整するようにしても良い。
【0020】
またさらに、測定装置の位置を所定の座標系に特定するために、第1及び第2撮像手段により識別可能な所定の位置に設けられる位置認識標識を撮影するようにしても良い。
【0021】
さらに、被測定点に当接させる棒状体と第1及び第2撮像手段により識別可能な、棒状体に設けられる標識手段とを有する狭所位置測定棒を用いて、被測定点の座標を測定することも可能である。
【0022】
また、第1撮像手段は近傍配置される少なくとも2つのカメラからなり、第2撮像手段は第1撮像手段に対して遠隔配置されるものであっても良い。
【0023】
また、運動物体上に載置される測定装置を少なくとも2つ用い、一方の測定装置は位置認識標識を撮影し、他方の測定装置は被測定点の座標を測定するようにしても良い。
【0024】
ここで、一方の測定装置は、その視野から位置認識標識が外れる前に、他方の測定装置が他の位置識別標識を検出し、検出された他の位置識別標識の位置座標を一方の測定装置に伝達し、一方の測定装置は他の位置識別標識に視野を移動するようにしても良い。
【発明の効果】
【0025】
本発明の3次元座標測定方法には、複数の撮像手段における被測定点の対応付けを高速に行え、また、ズーム機能を有していても容易に対応付けが行え、ズームインすることで高精細に被測定点を撮影できるため、より正確な被測定点の座標測定が可能であるという利点がある。
【発明を実施するための最良の形態】
【0026】
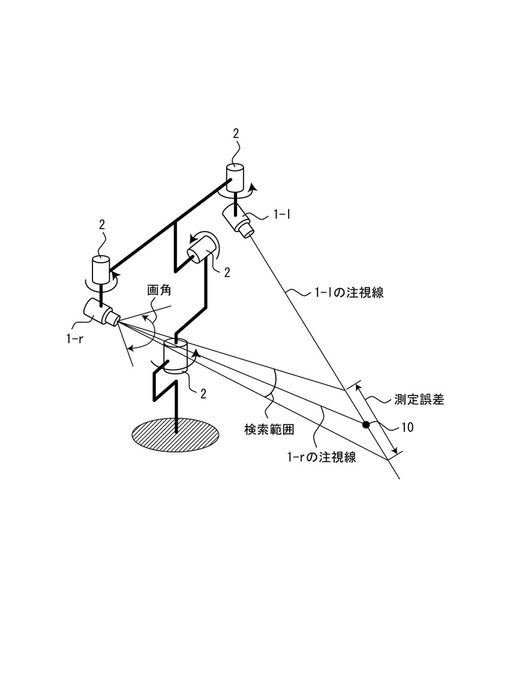
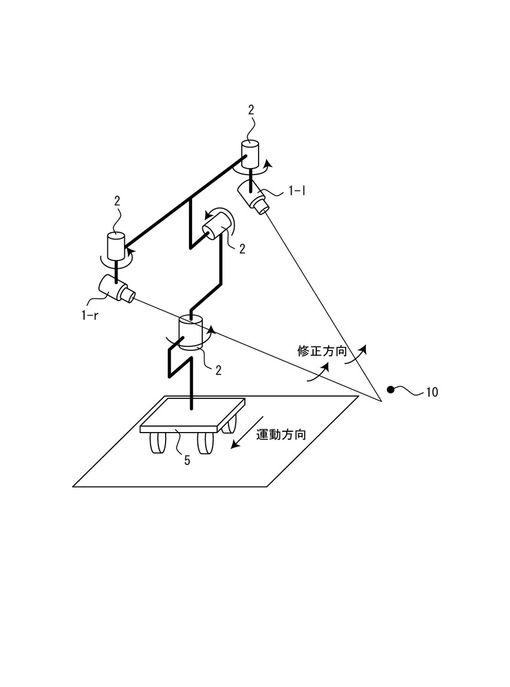
以下、本発明を実施するための最良の形態を図示例と共に説明する。図1は、本発明の3次元座標測定方法を適用する座標測定装置の概略図である。座標測定装置は、撮像手段である左右2つのカメラ1−l,1−rと、カメラ1を2自由度以上回転運動させるアクチュエータ2とからなる。カメラ1は、主に撮像素子とレンズとからなるものであり、測定対象である被測定点を撮影して画像情報を出力するものである。これはカラーやモノクロ何れかに限定されるものではなく、また撮像素子の画素数等も特定のものに限定されるものではない。なお、説明の便宜上、本明細書では2つのカメラを左右に配置した例について主に説明するが、本発明はこれに限定されず、上下に配置したものやその他の方向に配置したもの等、複眼で座標を測定するものであれば如何なる構成であっても構わない。
【0027】
そして、アクチュエータ2はモータ等からなるものであり、カメラを上下左右等に回転運動させるために用いられる。また、アクチュエータで回転運動させたときのカメラの回転角を測定する回転角センサも有する。これはアクチュエータからの回転角を用いて測定するものであっても良いし、カメラに回転方向センサを内蔵しても良い。このような座標測定装置を用いて、以下に説明する測定方法により被測定点の座標を測定する。
【0028】
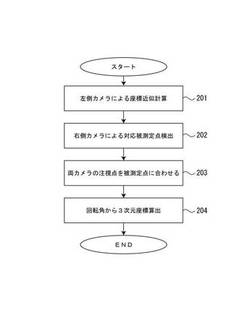
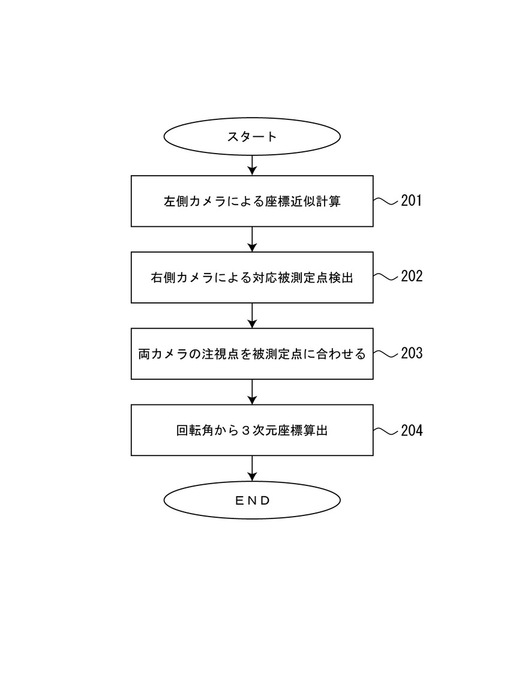
図2は、本発明の座標測定方法の工程を説明するためのフローチャートである。まず、左側カメラ1−lだけを用いて、被測定点10の座標を近似計算する(ステップ201)。カメラ1−lだけを用いて被測定点10の座標を計算する方法は種々あるが、例えば以下の方法を用いれば良い。すなわち、カメラ1−lを振動させ、そのときに出力される複数枚の画像情報から三角測量の原理により座標を近似計算する方法である。これは、本出願人と同一の出願人による特願2005−074869の発明を利用することも可能である。カメラ1−lを振動させて複数枚の画像を撮影すると、最大振動幅間において視差が生ずる。この視差画像を用いて三角測量の原理で計算すると、被測定点10の座標が算出できる。しかしながら、カメラ1−lから被測定点10までの奥行き方向には、図1に示すように測定誤差が生ずる。これは、視差を用いる場合の視差間(カメラ間、振動の場合には最大振動幅間)の距離に測定精度が依存するためである。ここで、図3を用いて測定精度とカメラ間の距離との関係を説明する。
【0029】
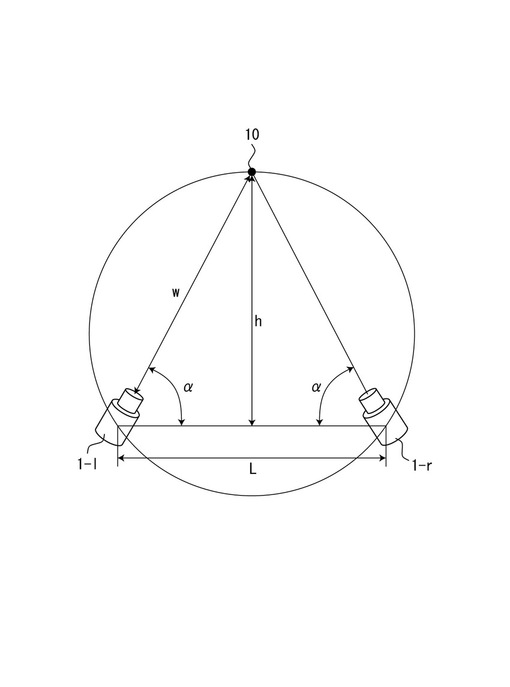
図3は、座標の測定精度とカメラ間の距離との関係を説明するための図であり、説明の便宜上、左右のカメラの回転角が等しい場合を例に挙げて説明する。なお、図示例ではカメラ1−r,1―lというように、2つのカメラを記載しているが、これは2つのカメラであっても1つのカメラを振動させた最大振動幅における状態であっても原理的には同じである。両カメラ間の距離をLとし、被測定点10から両カメラを結ぶ線までの距離をh、被測定点10から各カメラまでの距離をw、各カメラの光軸(視線、又は注視線)と両カメラを結ぶ線とが成す角をαとすると、これらには以下の関係がある。
【数1】

【数2】
数2から、カメラの回転角を測定する回転角センサの精度がΔαの場合、被測定点10の奥行きの距離の精度Δhは以下の式で表される。
【数3】
上記の式から分かるように、三角測量の原理で測定する被測定点の座標(距離)の誤差は、両カメラ間の距離Lに反比例する。上述のように、1つのカメラ1−lを振動させて被測定点の座標を測定した場合には、Δh分の測定誤差が生ずることになる。
【0030】
また、カメラ1−lだけを用いて被測定点10の座標を計算する他の手法としては、カメラ1−lのピントを被測定点10に合わせたときの焦点距離を用いて被測定点10までの距離を計算する方法がある。この場合にも、被写界深度の問題等により、正確な距離の算出は難しく、やはり奥行きに測定誤差が生ずる。
【0031】
このような方法により、左側カメラ1−lによる近似計算が行われる(図2のステップ201)。そして、次に右側カメラ1−rにより対応する被測定点10の検出が行われる(ステップ202)。ここでは、右側カメラ1−rはすべての領域を検索するのではなく、ステップ201で近似計算された結果を利用して対応する被測定点10を検索する。すなわち、近似計算による誤差範囲内で被測定点10を検索する。対応点の検索には、微分法や本出願人と同一の出願人による特願2005−074869のエッジ抽出法等、如何なる手法を用いても構わない。本願発明によれば、全空間領域内のすべてから、あるいは撮影された画像情報のすべてから対応する被測定点を検索するのではなく、所定の範囲内、すなわち近似計算の誤差範囲内のみで被測定点を検索するため、処理時間も速く、また他の点を被測定点と誤認する確率も非常に低くなる。
【0032】
ここで、ステップ201で近似計算された誤差範囲が、右側カメラ1−rの視野内にあればそのままその視野内で且つ誤差範囲内における対応点を検索すれば良いが、右側カメラ1−rの視野外に誤差範囲がある場合には、視野内に誤差範囲が入るようにアクチュエータ2を制御した後に、対応する被測定点を検索すれば良い。
【0033】
さらに、ステップ201で近似計算された誤差範囲が右側カメラ1−rの視野よりも広い場合には、右側カメラ1−rの視野が誤差範囲内を検索するようにアクチュエータ2を制御すれば良い。この場合でも、従来技術では検索範囲が本発明による検索範囲よりも広くなるため、検索速度や誤認識の問題等に関して有利である。
【0034】
このようにしてステップ202において、カメラ1−lで撮影した被測定点に対応する点をカメラ1−rで検出すると、次に左右のカメラ1−l,1−rの注視線(視線)をそれぞれ検出された被測定点に合わせる(ステップ203)。なお、注視線というのは、カメラの光学的な光軸、すなわち通常は撮像素子の中心点に撮像される視線であっても良いし、予め決められた所定の撮像される視線を注視線として規定しておき、中心からの角度を考慮して以降の三角測量の計算をすれば良い。
【0035】
そして、ステップ203で被測定点に注視線を向けられたカメラの回転角を回転角センサで測定し、それを用いて三角測量の原理により被測定点10の3次元座標を算出する(ステップ204)。このような一連の工程を経て、被測定点10の座標が算出される。以降、必要により、被測定点が移動するものの場合や測定装置を移動させる場合等には、上記の工程を繰り返すことで、リアルタイムに被測定点の3次元座標を測定することが可能である。そして、複数の被測定点の座標を測定することにより、被測定物の立体形状の測定も可能となる。測定したデータをCAD等に入力することで、極めて簡単に立体物の形状情報を電子化することも可能となる。
【0036】
ここで、本発明の座標測定方法は、ズーム機能を有するカメラにおいて、より顕著にその効果を発揮する。ズーム機能を有するカメラにおいては、被測定点にズームイン(狭角側で撮影)した場合、画角が狭くなるため、その視野内に対応する被測定点を確実に入れることは難しく、他の測定点を対応する被測定点と誤認することが多かった。しかしながら、本発明の測定方法を用いれば、被測定点を検索する範囲は誤差範囲内に限定できるため、すばやく対応する被測定点に合わせることが可能である。また、始めにズーム機能を広角側に設定しておき、対応する被測定点を検出し、カメラの注視点を被測定点に合わせた後、ズームインしてズーム機能の狭角側でカメラの注視点を再度被測定点に合わせることで、被測定点を高精細に撮影することが可能となる。これにより、カメラの撮像素子の画素数が少ない場合等により解像度が高くない場合であっても、高詳細な画像が得られるため精度高く被測定点の座標を検出することが可能となる。
【0037】
次に、本発明の3次元座標測定方法を適用可能な他の座標測定装置の例を説明する。図4は、上述した本発明の3次元座標測定方法を適用する他の座標測定装置の概略図である。図中、図1と同一の符号を付した部分は同一物を表わしており、基本的な構成は図1に示すものと同様である。本実施例では、カメラ1等を載置する基盤5を設けたものである。基盤5は、1自由度以上回転又は並進運動するように構成される。図4の例では、基盤5にタイヤ等が設けられており、所定の方向に並進運動するように構成されたものを例示している。なお、基盤の回転角度を測定するためのセンサや回転するときの回転加速度を測定するためのセンサ、並進するときの並進加速度を測定するためのセンサ等、種々のセンサを設けることも可能である。これらのセンサを単体で又は複合的に用い、測定装置の位置や移動方向を記録しながら、被測定点の座標を測定する。
【0038】
そして、基盤5の回転角、回転加速度、又は並進加速度等の情報と、回転角センサからのカメラの回転角の情報とを用いて、アクチュエータでカメラの視野を制御する。これは、基盤の回転又は並進運動により生ずる画像情報のずれを補償するために行われるものである。並進運動等により生じた被測定点の視線に対する偏移は、被測定点までの距離に反比例するため、これを補償するために、被測定点までの距離情報が必要である。例えば、被測定点が無限遠に近い場合は、測定装置を並進運動させても視線を調整する必要はないが、被測定点が近距離にある場合には、並進運動に対する視野(視線)の偏移が大きくなるため、その補償が必要となる。被測定点が近ければ近いほど並進運動の影響が大きくなり、画像のずれやぶれが大きくなる。したがって、測定装置が並進運動する場合には、並進加速度センサ等の情報と、カメラの回転角情報を用いて算出した被測定点の距離情報とを用いて、被測定点の距離情報を視線制御システムに取り入れて、視野を制御するように構成する。
【0039】
なお、基盤に水平度を測定するための水平センサを設けても良い。これは、左右のカメラの位置を水平方向に保つ場合等に用いられる。
【0040】
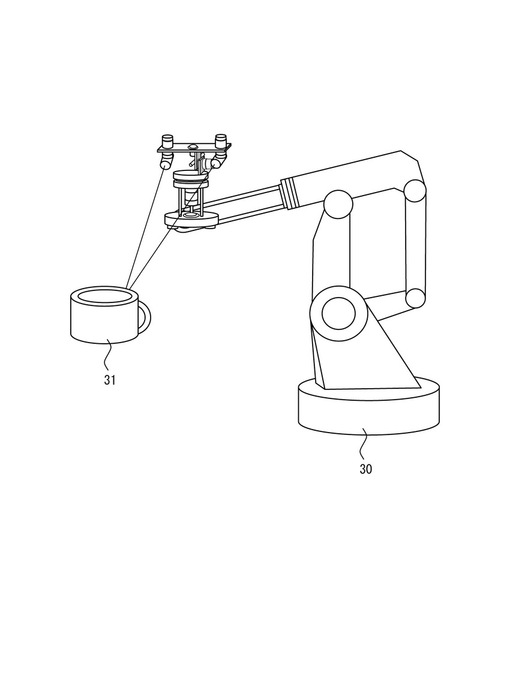
特定の立体物の形状を測定する場合には、3次元測定装置をマニピュレータの手先に設置すれば良い。図5に、マニピュレータを用いた測定装置に本発明の3次元座標測定方法を適用した例を説明するための図を示す。図示のように、マニピュレータ30の腕の先端に、本発明の3次元座標測定方法を適用可能な座標測定装置を設置し、被測定物31のすべての部位を測定するようにマニピュレータを動作させ、被測定物のすべての被測定点の座標を測定し、この座標情報をから被測定物31の立体形状の情報を得ることが可能となる。なお、上記とは反対に、被測定物31をマニピュレータ30の手先に設置し、座標測定装置を固定して被測定物のすべての被測定点の座標を測定可能なようにマニピュレータを動作させるようにしても勿論構わない。
【0041】
さらに、本発明の3次元座標測定方法を適用可能な座標測定装置としては、左右のカメラに用いられる画角よりも広い画角を有する広角カメラをさらに用いて、被測定点を撮影するものがある。これにより、被測定点の位置が分からず、左右のカメラで被測定点をすばやく捉えるのが難しい場合でも、まず広角カメラで環境を広く撮影して被測定点を検索し、被測定点が見つかるとその方向に左右のカメラを向けて被測定点を検索するように制御することで、すばやく被測定点を左右のカメラで捉えることが可能となる。このような広角カメラは、左右のカメラの視界全体をカバーできる画角を有することが好ましく、左右のカメラを結ぶ線の略中心近傍に設けられれば良い。そして、例えば基盤や左右カメラの連結部等に固定されて所定の方向を撮影するようにしても良いし、独立して向きを可変させて撮影できるように構成しても良い。
【0042】
また、座標測定装置の2つのカメラの間の距離を可変できるようにしたものを用いても良い。先に図3を用いて説明したように、三角測量の原理を用いて座標を測定する場合、被測定点の距離の誤差は両カメラ間の距離に反比例する。また、両カメラ間の距離が広くなればなるほど誤差は小さくなるが、今度は対応する被測定点に両カメラを合わせるのが難しくなってくる。この問題を解決するために、両カメラの間の距離を調整できるように構成した座標測定装置を用いることも可能である。すなわち、対応する被測定点を検索する段階では左右のカメラは近い位置に配置しておき、一旦対応する被測定点が検索されると、両カメラ間の距離を広げて、被測定点の座標測定精度を高めるように制御する。これにより、高速且つ高精度な座標の測定が可能となる。
【0043】
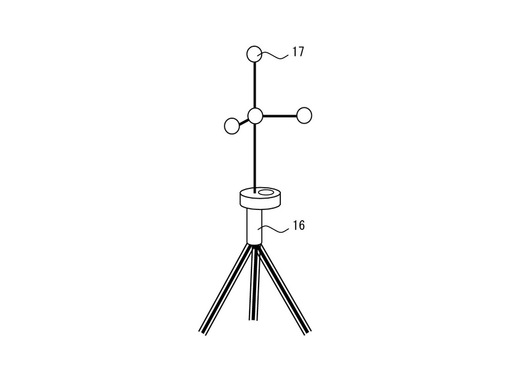
3次元座標測定装置を移動させながら被測定点(被測定物)を測定していく場合、測定データの座標系の原点をどこに置くかが問題となる場合がある。座標系の原点を装置以外に固定する場合、カメラ1により識別可能な所定の位置に設けられる位置識別標識を用いることが可能である。この位置識別標識は、例えば図6に示すような外部に固定される標識である。これは、三脚16等の上に設けられる、4つの所定の大きさの識別球17から構成されるものである。座標原点と座標軸とするx,y,z軸上の原点から一定の距離離した位置に、4つの識別球17をそれぞれ配置する。なお、原理的には3つの識別球があれば足りるが、測定精度や測定容易性等の観点から、4つ用いることが好ましい。また、識別球としては、例えば白色の球が挙げられるが、本発明はこれに限定されず、カメラで容易に識別可能な標識であれば、他の色であっても勿論構わない。さらに、識別球は電球等の識別標識であっても良い。
【0044】
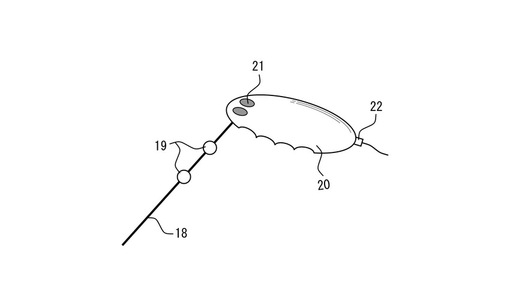
また、座標測定装置の視線が届かない場所、例えば狭所や物体の裏面側等にある被測定点を測定する場合には、以下に説明する狭所位置測定棒を用いることが可能である。狭所位置測定棒の一例を図7に示す。図示の通り、狭所位置測定棒は、棒状体18とそれに設けられる識別球19とからなるものである。図示例では識別球19を2個用いた。識別球19は予め所定の間隔や位置で棒状体18に配置されており、棒状体18の先端位置を被測定点に当接させ、これをカメラ1で撮影する。狭所位置測定棒の識別球19は予め間隔等が分かっているため、これを用いて当接した被測定点の座標を算出することが可能となる。なお、棒状体18の後端には持ち手20を設けても良い。持ち手20には、所定のボタン21が設けられ、このボタンを操作することによって、座標測定装置と通信することで座標計測命令等の操作が可能となる。また、座標測定装置との通信が可能となるように、所定のインタフェース22が設けられる。
【0045】
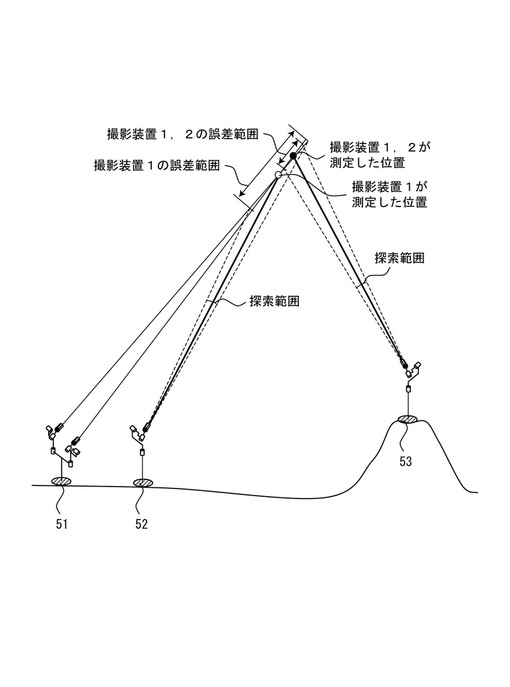
図8に、本発明の3次元座標測定方法の他の例を説明するための測定装置の概略を示す。図示例のものでは、被測定点の座標を近似計算するためのカメラが2台のカメラからなる第1撮影装置51であり、それと離れた位置に第2撮影装置52が設けられる。これまで説明してきた本発明の3次元座標測定方法と同様に、まず第1撮影装置51で被測定点10の座標を近似計算する。そして、この近似計算の誤差範囲内で、第2撮影装置52で被測定点を検索して検出し、各撮影装置の注視線を被測定点に合わせ、第1撮影装置51の回転角と第2撮影装置52の回転角とを用いて三角測量の原理により被測定点の座標を算出する。また、必要によりズーム機能を設けて、さらにより正確に座標を算出することも可能である。また、さらに別の撮影装置53を設けることで、同じ原理でより高精度な座標計測も可能となる。
【0046】
上述したとおり、カメラ間の距離が離れれば離れるほど測定精度が高くなるため、第2撮影装置52を第1撮影装置に対して遠隔配置することで、高精度に座標を算出することが可能となる。さらに、本発明によれば、撮影装置間が離れていても、対応する被測定点の検索が非常に高速にできるため、リアルタイム処理も容易に可能となる。
【0047】
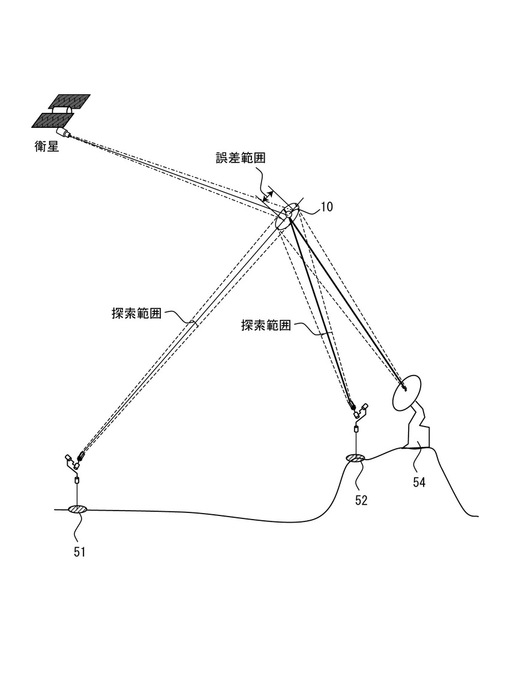
また、別の撮影装置53ではなく、他の手段、例えばGPSやレーダ、電波、超音波等の位置(座標)測定装置を本発明の座標測定方法に組み合わせることも可能である。図9にレーダを組み合わせた座標測定装置の概要を示す。まずレーダ54により被測定点の座標を近似計算し、その誤差範囲内で第1撮影装置及び第2撮影装置を動作させるようにすれば良い。両カメラで対応する被測定点が検出できれば、これまでの説明と同様に、各カメラの注視線に被測定点を合わせるようにアクチュエータで制御し、必要によりズームインして高解像度で被測定点を撮影し、再度注視線に合わせるようにした後に三角測量の原理を用いて被測定点の座標を算出する。
【0048】
なお、被測定点の座標測定精度は、両カメラの距離に比例するだけではなく、被測定点からカメラまでの距離の2乗に比例することについても注意を要する。カメラと他の位置測定装置を組み合わせて使用する場合には、それぞれの測定範囲と誤差範囲を考慮し、測定順序を適宜調整すれば良い。例えば、誤差が少ないもので先に測定した後に、その誤差範囲内で被測定点を探索したほうが、後のものの探索領域が狭く済むため、結果として測定時間が短くなり得る。
【0049】
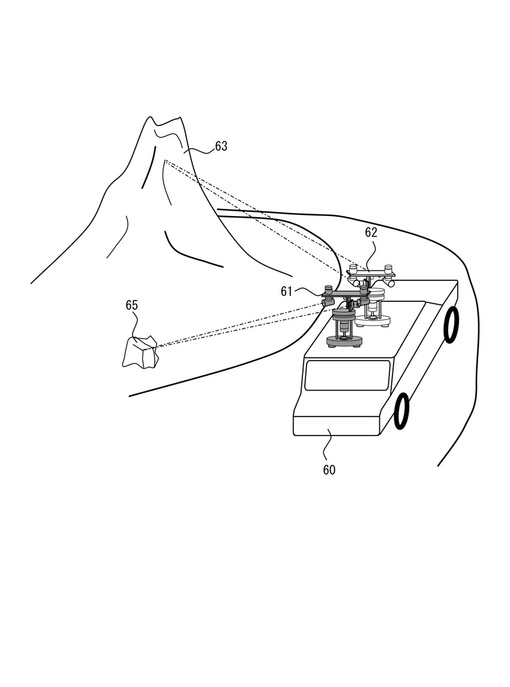
図10は、本発明の3次元座標測定方法を適用する座標測定装置を2台以上用いて、これを運動物体上に載置して移動しながら被測定点の座標を測定するものを説明するための図である。図示例では、運動物体である車両60の上に第1座標測定装置61と第2座標測定装置62とを載置し、対象物である山63の被測定点の座標を測定するものを示している。第2座標測定装置で環境に固定している位置識別標識となる特徴物体65、図示例では特徴的な岩等を常に撮影しながら車両の位置や姿勢を算出し、第1座標測定装置61で山63の位置と形状を測定する。特徴物体65は、図6や図7で説明した位置識別標識であっても良い。測定装置は1台でも勿論処理可能ではあるが、上記のように2台以上用いる方がより簡単に精度良く被測定物の測定が可能となる。
【0050】
ここで、車両60が移動していくと、特徴物体65が撮影できない位置になってしまう場合がある。この場合には、第2座標測定装置62の視野から特徴物体65が外れる前に、第1座標測定装置61が他の位置識別標識となり得る特徴物体を検出し、検出された他の特徴物体の位置座標を第2座標測定装置に伝達し、第2座標測定装置は新たな特徴物体に視野を移動するように制御する。これにより、例えば図示例の山63のような大きな物体であっても、すべての方向からの座標計測が可能となる。
【0051】
なお、本発明の3次元座標測定方法は、上述の図示例にのみ限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。例えば本発明は3次元座標測定方法として説明したが、座標測定に限定されず、被測定点の距離や立体形状、運動軌跡等、種々の測定にも応用可能である。
【0052】
本発明の3次元座標測定方法によれば、カメラの回転角を用いて被測定点の座標を測定するため、カメラの解像度の問題を回転角センサの分解能に転化することが可能となる。回転角センサの分解能は、エンコーダとギアの組み合わせ等によりカメラの解像度よりも遥かに高く、かつ安価に実現可能となる。
【図面の簡単な説明】
【0053】
【図1】図1は、本発明の3次元座標測定方法を適用する座標測定装置の概略図である。
【図2】図2は、本発明の3次元座標測定方法の工程を説明するためのフローチャートである。
【図3】図3は、3次元座標の測定精度とカメラ間の距離との関係を説明するための図である。
【図4】図4は、本発明の3次元座標測定方法を適用する他の座標測定装置の概略図である。
【図5】図5は、本発明の3次元座標測定方法をマニピュレータを用いる測定装置に適用した例を説明するための図である。
【図6】図6は、座標を固定するために外部に固定される位置識別標識の概略図である。
【図7】図7は、狭所を測定するときに用いられる狭所位置測定棒の概略図である。
【図8】図8は、本発明の3次元座標測定方法の他の例を説明するための測定装置の概略図である。
【図9】図9は、本発明の3次元座標測定方法を適用する装置にレーダを組み合わせた座標測定装置の概要図である。
【図10】図10は、本発明の3次元座標測定方法を適用する座標測定装置を2台以上用いた例を説明するための概略図である。
【符号の説明】
【0054】
1 カメラ
2 アクチュエータ
5 基盤
10 被測定点
16 三脚
17 識別球
18 棒状体
19 識別球
20 持ち手
21 ボタン
22 インタフェース
30 マニピュレータ
31 被測定物
51 第1撮影装置
52 第2撮影装置
53 第3撮影装置
54 レーダ
60 車両
61 第1座標測定装置
62 第2座標測定装置
63 山
65 特徴物体
【技術分野】
【0001】
本発明は3次元座標測定方法に関し、特に、複数のカメラを用いる座標測定装置において各カメラで共通の対応する被測定点を検出して三角測量の原理により座標を測定する3次元座標測定方法に関する。
【背景技術】
【0002】
従来から、2つのカメラを用いて被測定点の位置座標を測定する装置や方法が種々開発されている。これらは、通常、既知の2ヶ所の位置に配置された2つのカメラによって被測定点を撮影し、各カメラの視線を被測定点に合わせ、カメラの回転角度から三角測量の原理を用いて被測定点の座標を算出するものである。
【0003】
ここで、2つのカメラが独立に動作する場合、三角測量の原理を用いて座標を算出するためには、2つのカメラで対応する共通の被測定点を確実に撮影する必要がある。2つのカメラ間がある程度近い場合には、共通の被測定点を検出して撮影することもある程度容易であるが、三角測量の原理上、カメラ間の距離は広いほうが算出された座標の誤差は少ない。したがって、測定精度のことを考えるとカメラ間は離すほうが望ましい。
【0004】
また、被測定点の座標の測定精度を増すために、カメラにズーム機能を設けたものもある(特許文献1)。これは、被測定点にカメラを向けて、さらにズーム機能でズームインして画像を拡大するものである。
【0005】
【特許文献1】特開平6−79671号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、従来の独立して動作する2つのカメラを用いた座標測定方法においては、測定精度を上げるために2つのカメラ間の距離を離した場合、一方のカメラで撮影した被測定点を他方のカメラで撮影するのは難しいという問題がある。一方のカメラで撮影している被測定点の位置が分からないため、他方のカメラで対応点を探すのには、すべての領域において例えば微分法による対応点の検索等が行なわれており、非常に時間がかかるものであった。これは特に遠方の被測定点を測定する場合に顕著な問題となる。一方のカメラで撮影している被測定点と他方のカメラで撮影している被測定点が異なる点であると、正しい座標を算出できなくなってしまう。対応する被測定点を求めるのには非常に多くの計算が必要になり処理時間がかかるため、被測定点が移動体の一部である場合にはリアルタイムに座標を算出するようなことは特に難しかった。
【0007】
また、ズーム機能を用いて被測定点を高解像度で撮影して測定精度を向上する例では、ズーム機能を狭角側にした場合にカメラの画角が狭くなる。遠方の被測定点に対してズームインした場合等にはかなり画角が狭くなってしまうが、このような狭い画角のカメラを用いて共通の対応する被測定点を撮影することは、さらに困難であった。
【0008】
本発明は、斯かる実情に鑑み、2つのカメラによる被測定点の対応付けを容易とする3次元座標測定方法を提供しようとするものである。
【課題を解決するための手段】
【0009】
上述した本発明の目的を達成するために、本発明による3次元座標測定方法は、被測定点を撮影し画像情報を出力する第1及び第2撮像手段と、該撮像手段を2自由度以上回転運動させるアクチュエータと、撮像手段の回転角を測定する回転角センサとを有する測定装置により、第1撮像手段を用いて被測定点の座標を近似計算する過程と、近似計算の誤差範囲内で第2撮像手段からの画像情報を用いて被測定点を検出する過程と、第1及び第2撮像手段の注視線を、アクチュエータを用いて検出された被測定点に合わせる過程と、回転角センサで測定される回転角を用いて三角測量の原理により被測定点の3次元座標を算出する過程とを具備するものである。
【0010】
さらに、被測定点を検出する過程は、近似計算の誤差範囲が第2撮像手段の視野から外れているときには、第2撮像手段の視野内に誤差範囲が入るようにアクチュエータを制御する。
【0011】
また、被測定点を検出する過程は、近似計算の誤差範囲が第2撮像手段の視野よりも大きいときには、第2撮像手段の視野が誤差範囲内を探索するようにアクチュエータを制御する。
【0012】
ここで、近似計算する過程は、第1撮像手段の光軸を振動させ、そのときに出力される複数枚の画像情報から三角測量の原理により座標を近似計算することでも実現可能である。
【0013】
また、近似計算する過程は、被測定点に第1撮像手段のピントを合わせたときの焦点距離を用いても良い。
【0014】
また、撮像手段はズーム機能を有し、該ズーム機能の広角側で撮像手段の注視線を被測定点に合わせた後に、ズーム機能の狭角側で撮像手段の注視線を被測定点に再度合わせるようにしても良い。
【0015】
さらに、第1及び第2撮像手段を載置する基盤を1自由度以上回転又は並進運動させるようにしても良い。
【0016】
そして、基盤の回転角や回転加速度、並進加速度等を測定するようにしても良い。これら基盤の回転角、回転加速度又は並進加速度と、回転角センサからの撮像手段の回転角とを用いて、基盤の回転又は並進運動により生ずる画像情報のずれを補償するために、アクチュエータで撮像手段の視野を制御するようにしても良い。また、基盤の水平度を測定するようにしても良い。
【0017】
さらにまた、第1及び第2撮像手段よりも画角の広い広角撮像手段を用いて被測定点を撮影するようにしても良い。
【0018】
また、広角撮像手段は、第1撮像手段と第2撮像手段とを結ぶ線の略中心近傍に設けられれば良い。
【0019】
さらに、第1及び第2撮像手段の間の距離を調整するようにしても良い。
【0020】
またさらに、測定装置の位置を所定の座標系に特定するために、第1及び第2撮像手段により識別可能な所定の位置に設けられる位置認識標識を撮影するようにしても良い。
【0021】
さらに、被測定点に当接させる棒状体と第1及び第2撮像手段により識別可能な、棒状体に設けられる標識手段とを有する狭所位置測定棒を用いて、被測定点の座標を測定することも可能である。
【0022】
また、第1撮像手段は近傍配置される少なくとも2つのカメラからなり、第2撮像手段は第1撮像手段に対して遠隔配置されるものであっても良い。
【0023】
また、運動物体上に載置される測定装置を少なくとも2つ用い、一方の測定装置は位置認識標識を撮影し、他方の測定装置は被測定点の座標を測定するようにしても良い。
【0024】
ここで、一方の測定装置は、その視野から位置認識標識が外れる前に、他方の測定装置が他の位置識別標識を検出し、検出された他の位置識別標識の位置座標を一方の測定装置に伝達し、一方の測定装置は他の位置識別標識に視野を移動するようにしても良い。
【発明の効果】
【0025】
本発明の3次元座標測定方法には、複数の撮像手段における被測定点の対応付けを高速に行え、また、ズーム機能を有していても容易に対応付けが行え、ズームインすることで高精細に被測定点を撮影できるため、より正確な被測定点の座標測定が可能であるという利点がある。
【発明を実施するための最良の形態】
【0026】
以下、本発明を実施するための最良の形態を図示例と共に説明する。図1は、本発明の3次元座標測定方法を適用する座標測定装置の概略図である。座標測定装置は、撮像手段である左右2つのカメラ1−l,1−rと、カメラ1を2自由度以上回転運動させるアクチュエータ2とからなる。カメラ1は、主に撮像素子とレンズとからなるものであり、測定対象である被測定点を撮影して画像情報を出力するものである。これはカラーやモノクロ何れかに限定されるものではなく、また撮像素子の画素数等も特定のものに限定されるものではない。なお、説明の便宜上、本明細書では2つのカメラを左右に配置した例について主に説明するが、本発明はこれに限定されず、上下に配置したものやその他の方向に配置したもの等、複眼で座標を測定するものであれば如何なる構成であっても構わない。
【0027】
そして、アクチュエータ2はモータ等からなるものであり、カメラを上下左右等に回転運動させるために用いられる。また、アクチュエータで回転運動させたときのカメラの回転角を測定する回転角センサも有する。これはアクチュエータからの回転角を用いて測定するものであっても良いし、カメラに回転方向センサを内蔵しても良い。このような座標測定装置を用いて、以下に説明する測定方法により被測定点の座標を測定する。
【0028】
図2は、本発明の座標測定方法の工程を説明するためのフローチャートである。まず、左側カメラ1−lだけを用いて、被測定点10の座標を近似計算する(ステップ201)。カメラ1−lだけを用いて被測定点10の座標を計算する方法は種々あるが、例えば以下の方法を用いれば良い。すなわち、カメラ1−lを振動させ、そのときに出力される複数枚の画像情報から三角測量の原理により座標を近似計算する方法である。これは、本出願人と同一の出願人による特願2005−074869の発明を利用することも可能である。カメラ1−lを振動させて複数枚の画像を撮影すると、最大振動幅間において視差が生ずる。この視差画像を用いて三角測量の原理で計算すると、被測定点10の座標が算出できる。しかしながら、カメラ1−lから被測定点10までの奥行き方向には、図1に示すように測定誤差が生ずる。これは、視差を用いる場合の視差間(カメラ間、振動の場合には最大振動幅間)の距離に測定精度が依存するためである。ここで、図3を用いて測定精度とカメラ間の距離との関係を説明する。
【0029】
図3は、座標の測定精度とカメラ間の距離との関係を説明するための図であり、説明の便宜上、左右のカメラの回転角が等しい場合を例に挙げて説明する。なお、図示例ではカメラ1−r,1―lというように、2つのカメラを記載しているが、これは2つのカメラであっても1つのカメラを振動させた最大振動幅における状態であっても原理的には同じである。両カメラ間の距離をLとし、被測定点10から両カメラを結ぶ線までの距離をh、被測定点10から各カメラまでの距離をw、各カメラの光軸(視線、又は注視線)と両カメラを結ぶ線とが成す角をαとすると、これらには以下の関係がある。
【数1】
【数2】
数2から、カメラの回転角を測定する回転角センサの精度がΔαの場合、被測定点10の奥行きの距離の精度Δhは以下の式で表される。
【数3】
上記の式から分かるように、三角測量の原理で測定する被測定点の座標(距離)の誤差は、両カメラ間の距離Lに反比例する。上述のように、1つのカメラ1−lを振動させて被測定点の座標を測定した場合には、Δh分の測定誤差が生ずることになる。
【0030】
また、カメラ1−lだけを用いて被測定点10の座標を計算する他の手法としては、カメラ1−lのピントを被測定点10に合わせたときの焦点距離を用いて被測定点10までの距離を計算する方法がある。この場合にも、被写界深度の問題等により、正確な距離の算出は難しく、やはり奥行きに測定誤差が生ずる。
【0031】
このような方法により、左側カメラ1−lによる近似計算が行われる(図2のステップ201)。そして、次に右側カメラ1−rにより対応する被測定点10の検出が行われる(ステップ202)。ここでは、右側カメラ1−rはすべての領域を検索するのではなく、ステップ201で近似計算された結果を利用して対応する被測定点10を検索する。すなわち、近似計算による誤差範囲内で被測定点10を検索する。対応点の検索には、微分法や本出願人と同一の出願人による特願2005−074869のエッジ抽出法等、如何なる手法を用いても構わない。本願発明によれば、全空間領域内のすべてから、あるいは撮影された画像情報のすべてから対応する被測定点を検索するのではなく、所定の範囲内、すなわち近似計算の誤差範囲内のみで被測定点を検索するため、処理時間も速く、また他の点を被測定点と誤認する確率も非常に低くなる。
【0032】
ここで、ステップ201で近似計算された誤差範囲が、右側カメラ1−rの視野内にあればそのままその視野内で且つ誤差範囲内における対応点を検索すれば良いが、右側カメラ1−rの視野外に誤差範囲がある場合には、視野内に誤差範囲が入るようにアクチュエータ2を制御した後に、対応する被測定点を検索すれば良い。
【0033】
さらに、ステップ201で近似計算された誤差範囲が右側カメラ1−rの視野よりも広い場合には、右側カメラ1−rの視野が誤差範囲内を検索するようにアクチュエータ2を制御すれば良い。この場合でも、従来技術では検索範囲が本発明による検索範囲よりも広くなるため、検索速度や誤認識の問題等に関して有利である。
【0034】
このようにしてステップ202において、カメラ1−lで撮影した被測定点に対応する点をカメラ1−rで検出すると、次に左右のカメラ1−l,1−rの注視線(視線)をそれぞれ検出された被測定点に合わせる(ステップ203)。なお、注視線というのは、カメラの光学的な光軸、すなわち通常は撮像素子の中心点に撮像される視線であっても良いし、予め決められた所定の撮像される視線を注視線として規定しておき、中心からの角度を考慮して以降の三角測量の計算をすれば良い。
【0035】
そして、ステップ203で被測定点に注視線を向けられたカメラの回転角を回転角センサで測定し、それを用いて三角測量の原理により被測定点10の3次元座標を算出する(ステップ204)。このような一連の工程を経て、被測定点10の座標が算出される。以降、必要により、被測定点が移動するものの場合や測定装置を移動させる場合等には、上記の工程を繰り返すことで、リアルタイムに被測定点の3次元座標を測定することが可能である。そして、複数の被測定点の座標を測定することにより、被測定物の立体形状の測定も可能となる。測定したデータをCAD等に入力することで、極めて簡単に立体物の形状情報を電子化することも可能となる。
【0036】
ここで、本発明の座標測定方法は、ズーム機能を有するカメラにおいて、より顕著にその効果を発揮する。ズーム機能を有するカメラにおいては、被測定点にズームイン(狭角側で撮影)した場合、画角が狭くなるため、その視野内に対応する被測定点を確実に入れることは難しく、他の測定点を対応する被測定点と誤認することが多かった。しかしながら、本発明の測定方法を用いれば、被測定点を検索する範囲は誤差範囲内に限定できるため、すばやく対応する被測定点に合わせることが可能である。また、始めにズーム機能を広角側に設定しておき、対応する被測定点を検出し、カメラの注視点を被測定点に合わせた後、ズームインしてズーム機能の狭角側でカメラの注視点を再度被測定点に合わせることで、被測定点を高精細に撮影することが可能となる。これにより、カメラの撮像素子の画素数が少ない場合等により解像度が高くない場合であっても、高詳細な画像が得られるため精度高く被測定点の座標を検出することが可能となる。
【0037】
次に、本発明の3次元座標測定方法を適用可能な他の座標測定装置の例を説明する。図4は、上述した本発明の3次元座標測定方法を適用する他の座標測定装置の概略図である。図中、図1と同一の符号を付した部分は同一物を表わしており、基本的な構成は図1に示すものと同様である。本実施例では、カメラ1等を載置する基盤5を設けたものである。基盤5は、1自由度以上回転又は並進運動するように構成される。図4の例では、基盤5にタイヤ等が設けられており、所定の方向に並進運動するように構成されたものを例示している。なお、基盤の回転角度を測定するためのセンサや回転するときの回転加速度を測定するためのセンサ、並進するときの並進加速度を測定するためのセンサ等、種々のセンサを設けることも可能である。これらのセンサを単体で又は複合的に用い、測定装置の位置や移動方向を記録しながら、被測定点の座標を測定する。
【0038】
そして、基盤5の回転角、回転加速度、又は並進加速度等の情報と、回転角センサからのカメラの回転角の情報とを用いて、アクチュエータでカメラの視野を制御する。これは、基盤の回転又は並進運動により生ずる画像情報のずれを補償するために行われるものである。並進運動等により生じた被測定点の視線に対する偏移は、被測定点までの距離に反比例するため、これを補償するために、被測定点までの距離情報が必要である。例えば、被測定点が無限遠に近い場合は、測定装置を並進運動させても視線を調整する必要はないが、被測定点が近距離にある場合には、並進運動に対する視野(視線)の偏移が大きくなるため、その補償が必要となる。被測定点が近ければ近いほど並進運動の影響が大きくなり、画像のずれやぶれが大きくなる。したがって、測定装置が並進運動する場合には、並進加速度センサ等の情報と、カメラの回転角情報を用いて算出した被測定点の距離情報とを用いて、被測定点の距離情報を視線制御システムに取り入れて、視野を制御するように構成する。
【0039】
なお、基盤に水平度を測定するための水平センサを設けても良い。これは、左右のカメラの位置を水平方向に保つ場合等に用いられる。
【0040】
特定の立体物の形状を測定する場合には、3次元測定装置をマニピュレータの手先に設置すれば良い。図5に、マニピュレータを用いた測定装置に本発明の3次元座標測定方法を適用した例を説明するための図を示す。図示のように、マニピュレータ30の腕の先端に、本発明の3次元座標測定方法を適用可能な座標測定装置を設置し、被測定物31のすべての部位を測定するようにマニピュレータを動作させ、被測定物のすべての被測定点の座標を測定し、この座標情報をから被測定物31の立体形状の情報を得ることが可能となる。なお、上記とは反対に、被測定物31をマニピュレータ30の手先に設置し、座標測定装置を固定して被測定物のすべての被測定点の座標を測定可能なようにマニピュレータを動作させるようにしても勿論構わない。
【0041】
さらに、本発明の3次元座標測定方法を適用可能な座標測定装置としては、左右のカメラに用いられる画角よりも広い画角を有する広角カメラをさらに用いて、被測定点を撮影するものがある。これにより、被測定点の位置が分からず、左右のカメラで被測定点をすばやく捉えるのが難しい場合でも、まず広角カメラで環境を広く撮影して被測定点を検索し、被測定点が見つかるとその方向に左右のカメラを向けて被測定点を検索するように制御することで、すばやく被測定点を左右のカメラで捉えることが可能となる。このような広角カメラは、左右のカメラの視界全体をカバーできる画角を有することが好ましく、左右のカメラを結ぶ線の略中心近傍に設けられれば良い。そして、例えば基盤や左右カメラの連結部等に固定されて所定の方向を撮影するようにしても良いし、独立して向きを可変させて撮影できるように構成しても良い。
【0042】
また、座標測定装置の2つのカメラの間の距離を可変できるようにしたものを用いても良い。先に図3を用いて説明したように、三角測量の原理を用いて座標を測定する場合、被測定点の距離の誤差は両カメラ間の距離に反比例する。また、両カメラ間の距離が広くなればなるほど誤差は小さくなるが、今度は対応する被測定点に両カメラを合わせるのが難しくなってくる。この問題を解決するために、両カメラの間の距離を調整できるように構成した座標測定装置を用いることも可能である。すなわち、対応する被測定点を検索する段階では左右のカメラは近い位置に配置しておき、一旦対応する被測定点が検索されると、両カメラ間の距離を広げて、被測定点の座標測定精度を高めるように制御する。これにより、高速且つ高精度な座標の測定が可能となる。
【0043】
3次元座標測定装置を移動させながら被測定点(被測定物)を測定していく場合、測定データの座標系の原点をどこに置くかが問題となる場合がある。座標系の原点を装置以外に固定する場合、カメラ1により識別可能な所定の位置に設けられる位置識別標識を用いることが可能である。この位置識別標識は、例えば図6に示すような外部に固定される標識である。これは、三脚16等の上に設けられる、4つの所定の大きさの識別球17から構成されるものである。座標原点と座標軸とするx,y,z軸上の原点から一定の距離離した位置に、4つの識別球17をそれぞれ配置する。なお、原理的には3つの識別球があれば足りるが、測定精度や測定容易性等の観点から、4つ用いることが好ましい。また、識別球としては、例えば白色の球が挙げられるが、本発明はこれに限定されず、カメラで容易に識別可能な標識であれば、他の色であっても勿論構わない。さらに、識別球は電球等の識別標識であっても良い。
【0044】
また、座標測定装置の視線が届かない場所、例えば狭所や物体の裏面側等にある被測定点を測定する場合には、以下に説明する狭所位置測定棒を用いることが可能である。狭所位置測定棒の一例を図7に示す。図示の通り、狭所位置測定棒は、棒状体18とそれに設けられる識別球19とからなるものである。図示例では識別球19を2個用いた。識別球19は予め所定の間隔や位置で棒状体18に配置されており、棒状体18の先端位置を被測定点に当接させ、これをカメラ1で撮影する。狭所位置測定棒の識別球19は予め間隔等が分かっているため、これを用いて当接した被測定点の座標を算出することが可能となる。なお、棒状体18の後端には持ち手20を設けても良い。持ち手20には、所定のボタン21が設けられ、このボタンを操作することによって、座標測定装置と通信することで座標計測命令等の操作が可能となる。また、座標測定装置との通信が可能となるように、所定のインタフェース22が設けられる。
【0045】
図8に、本発明の3次元座標測定方法の他の例を説明するための測定装置の概略を示す。図示例のものでは、被測定点の座標を近似計算するためのカメラが2台のカメラからなる第1撮影装置51であり、それと離れた位置に第2撮影装置52が設けられる。これまで説明してきた本発明の3次元座標測定方法と同様に、まず第1撮影装置51で被測定点10の座標を近似計算する。そして、この近似計算の誤差範囲内で、第2撮影装置52で被測定点を検索して検出し、各撮影装置の注視線を被測定点に合わせ、第1撮影装置51の回転角と第2撮影装置52の回転角とを用いて三角測量の原理により被測定点の座標を算出する。また、必要によりズーム機能を設けて、さらにより正確に座標を算出することも可能である。また、さらに別の撮影装置53を設けることで、同じ原理でより高精度な座標計測も可能となる。
【0046】
上述したとおり、カメラ間の距離が離れれば離れるほど測定精度が高くなるため、第2撮影装置52を第1撮影装置に対して遠隔配置することで、高精度に座標を算出することが可能となる。さらに、本発明によれば、撮影装置間が離れていても、対応する被測定点の検索が非常に高速にできるため、リアルタイム処理も容易に可能となる。
【0047】
また、別の撮影装置53ではなく、他の手段、例えばGPSやレーダ、電波、超音波等の位置(座標)測定装置を本発明の座標測定方法に組み合わせることも可能である。図9にレーダを組み合わせた座標測定装置の概要を示す。まずレーダ54により被測定点の座標を近似計算し、その誤差範囲内で第1撮影装置及び第2撮影装置を動作させるようにすれば良い。両カメラで対応する被測定点が検出できれば、これまでの説明と同様に、各カメラの注視線に被測定点を合わせるようにアクチュエータで制御し、必要によりズームインして高解像度で被測定点を撮影し、再度注視線に合わせるようにした後に三角測量の原理を用いて被測定点の座標を算出する。
【0048】
なお、被測定点の座標測定精度は、両カメラの距離に比例するだけではなく、被測定点からカメラまでの距離の2乗に比例することについても注意を要する。カメラと他の位置測定装置を組み合わせて使用する場合には、それぞれの測定範囲と誤差範囲を考慮し、測定順序を適宜調整すれば良い。例えば、誤差が少ないもので先に測定した後に、その誤差範囲内で被測定点を探索したほうが、後のものの探索領域が狭く済むため、結果として測定時間が短くなり得る。
【0049】
図10は、本発明の3次元座標測定方法を適用する座標測定装置を2台以上用いて、これを運動物体上に載置して移動しながら被測定点の座標を測定するものを説明するための図である。図示例では、運動物体である車両60の上に第1座標測定装置61と第2座標測定装置62とを載置し、対象物である山63の被測定点の座標を測定するものを示している。第2座標測定装置で環境に固定している位置識別標識となる特徴物体65、図示例では特徴的な岩等を常に撮影しながら車両の位置や姿勢を算出し、第1座標測定装置61で山63の位置と形状を測定する。特徴物体65は、図6や図7で説明した位置識別標識であっても良い。測定装置は1台でも勿論処理可能ではあるが、上記のように2台以上用いる方がより簡単に精度良く被測定物の測定が可能となる。
【0050】
ここで、車両60が移動していくと、特徴物体65が撮影できない位置になってしまう場合がある。この場合には、第2座標測定装置62の視野から特徴物体65が外れる前に、第1座標測定装置61が他の位置識別標識となり得る特徴物体を検出し、検出された他の特徴物体の位置座標を第2座標測定装置に伝達し、第2座標測定装置は新たな特徴物体に視野を移動するように制御する。これにより、例えば図示例の山63のような大きな物体であっても、すべての方向からの座標計測が可能となる。
【0051】
なお、本発明の3次元座標測定方法は、上述の図示例にのみ限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。例えば本発明は3次元座標測定方法として説明したが、座標測定に限定されず、被測定点の距離や立体形状、運動軌跡等、種々の測定にも応用可能である。
【0052】
本発明の3次元座標測定方法によれば、カメラの回転角を用いて被測定点の座標を測定するため、カメラの解像度の問題を回転角センサの分解能に転化することが可能となる。回転角センサの分解能は、エンコーダとギアの組み合わせ等によりカメラの解像度よりも遥かに高く、かつ安価に実現可能となる。
【図面の簡単な説明】
【0053】
【図1】図1は、本発明の3次元座標測定方法を適用する座標測定装置の概略図である。
【図2】図2は、本発明の3次元座標測定方法の工程を説明するためのフローチャートである。
【図3】図3は、3次元座標の測定精度とカメラ間の距離との関係を説明するための図である。
【図4】図4は、本発明の3次元座標測定方法を適用する他の座標測定装置の概略図である。
【図5】図5は、本発明の3次元座標測定方法をマニピュレータを用いる測定装置に適用した例を説明するための図である。
【図6】図6は、座標を固定するために外部に固定される位置識別標識の概略図である。
【図7】図7は、狭所を測定するときに用いられる狭所位置測定棒の概略図である。
【図8】図8は、本発明の3次元座標測定方法の他の例を説明するための測定装置の概略図である。
【図9】図9は、本発明の3次元座標測定方法を適用する装置にレーダを組み合わせた座標測定装置の概要図である。
【図10】図10は、本発明の3次元座標測定方法を適用する座標測定装置を2台以上用いた例を説明するための概略図である。
【符号の説明】
【0054】
1 カメラ
2 アクチュエータ
5 基盤
10 被測定点
16 三脚
17 識別球
18 棒状体
19 識別球
20 持ち手
21 ボタン
22 インタフェース
30 マニピュレータ
31 被測定物
51 第1撮影装置
52 第2撮影装置
53 第3撮影装置
54 レーダ
60 車両
61 第1座標測定装置
62 第2座標測定装置
63 山
65 特徴物体
【特許請求の範囲】
【請求項1】
3次元空間に配置された被測定点の座標を測定する方法であって、該方法は、
被測定点を撮影し画像情報を出力する第1及び第2撮像手段と、該撮像手段を2自由度以上回転運動させるアクチュエータと、撮像手段の回転角を測定する回転角センサとを有する測定装置により、
第1撮像手段を用いて被測定点の座標を近似計算する過程と、
近似計算の誤差範囲内で第2撮像手段からの画像情報を用いて被測定点を検出する過程と、
第1及び第2撮像手段の注視線を、アクチュエータを用いて検出された被測定点に合わせる過程と、
回転角センサで測定される回転角を用いて三角測量の原理により被測定点の3次元座標を算出する過程と、
を具備することを特徴とする3次元座標測定方法。
【請求項2】
請求項1に記載の測定方法において、前記被測定点を検出する過程は、近似計算の誤差範囲が第2撮像手段の視野から外れているときには、第2撮像手段の視野内に誤差範囲が入るようにアクチュエータを制御する過程を有することを特徴とする3次元座標測定方法。
【請求項3】
請求項1又は請求項2に記載の測定方法において、前記被測定点を検出する過程は、近似計算の誤差範囲が第2撮像手段の視野よりも大きいときには、第2撮像手段の視野が誤差範囲内を探索するようにアクチュエータを制御する過程を有することを特徴とする3次元座標測定方法。
【請求項4】
請求項1乃至請求項3の何れかに記載の測定方法において、前記近似計算する過程は、第1撮像手段の光軸を振動させ、そのときに出力される複数枚の画像情報から三角測量の原理により座標を近似計算する過程であることを特徴とする3次元座標測定方法。
【請求項5】
請求項1乃至請求項3の何れかに記載の測定方法において、前記近似計算する過程は、被測定点に第1撮像手段のピントを合わせたときの焦点距離を用いることを特徴とする3次元座標測定方法。
【請求項6】
請求項1乃至請求項5の何れかに記載の測定方法において、前記撮像手段はズーム機能を有し、該ズーム機能の広角側で撮像手段の注視線を被測定点に合わせた後に、ズーム機能の狭角側で撮像手段の注視線を被測定点に再度合わせることを特徴とする3次元座標測定方法。
【請求項7】
請求項1乃至請求項6の何れかに記載の測定方法であって、さらに、前記第1及び第2撮像手段を載置する基盤を1自由度以上回転又は並進運動させることを特徴とする3次元座標測定方法。
【請求項8】
請求項7に記載の測定方法であって、さらに、前記基盤の回転角又は並進運動距離を測定することを特徴とする3次元座標測定方法。
【請求項9】
請求項7又は請求項8に記載の測定方法であって、さらに、前記基盤の回転加速度を測定することを特徴とする3次元座標測定方法。
【請求項10】
請求項7乃至請求項9の何れかに記載の測定方法であって、さらに、前記基盤の並進加速度を測定することを特徴とする3次元座標測定方法。
【請求項11】
請求項8乃至請求項10の何れかに記載の測定方法において、前記基盤の回転角、回転加速度又は並進加速度と、回転角センサからの撮像手段の回転角とを用いて、基盤の回転又は並進運動により生ずる画像情報のずれを補償するために、アクチュエータで撮像手段の視野を制御することを特徴とする3次元座標測定方法。
【請求項12】
請求項7乃至請求項11の何れかに記載の測定方法であって、さらに、前記基盤の水平度を測定することを特徴とする3次元座標測定方法。
【請求項13】
請求項1乃至請求項12の何れかに記載の測定方法であって、さらに、前記第1及び第2撮像手段よりも画角の広い広角撮像手段を用いて被測定点を撮影することを特徴とする3次元座標測定方法。
【請求項14】
請求項13に記載の測定方法において、前記広角撮像手段は、第1撮像手段と第2撮像手段とを結ぶ線の略中心近傍に設けられることを特徴とする3次元座標測定方法。
【請求項15】
請求項1乃至請求項14の何れかに記載の測定方法であって、さらに、前記第1及び第2撮像手段の間の距離を調整することを特徴とする3次元座標測定方法。
【請求項16】
請求項1乃至請求項15の何れかに記載の測定方法であって、さらに、前記測定装置の位置を所定の座標系に特定するために、第1及び第2撮像手段により識別可能な所定の位置に設けられる位置認識標識を撮影することを特徴とする3次元座標測定方法。
【請求項17】
請求項1乃至請求項16の何れかに記載の測定方法であって、さらに、被測定点に当接させる棒状体と第1及び第2撮像手段により識別可能な、棒状体に設けられる標識手段とを有する狭所位置測定棒を用いて、被測定点の座標を測定することを特徴とする3次元座標測定方法。
【請求項18】
請求項1乃至請求項17の何れかに記載の測定方法において、前記第1撮像手段は近傍配置される少なくとも2つのカメラからなり、前記第2撮像手段は第1撮像手段に対して遠隔配置されることを特徴とする3次元座標測定方法。
【請求項19】
請求項16乃至請求項18の何れかに記載の測定方法において、運動物体上に載置される前記測定装置を少なくとも2つ用い、一方の測定装置は前記位置認識標識を撮影し、他方の測定装置は被測定点の座標を測定することを特徴とする3次元座標測定方法。
【請求項20】
請求項19に記載の測定方法において、前記一方の測定装置は、その視野から位置認識標識が外れる前に、他方の測定装置が他の位置識別標識を検出し、検出された他の位置識別標識の位置座標を一方の測定装置に伝達し、一方の測定装置は他の位置識別標識に視野を移動することを特徴とする3次元座標測定方法。
【請求項1】
3次元空間に配置された被測定点の座標を測定する方法であって、該方法は、
被測定点を撮影し画像情報を出力する第1及び第2撮像手段と、該撮像手段を2自由度以上回転運動させるアクチュエータと、撮像手段の回転角を測定する回転角センサとを有する測定装置により、
第1撮像手段を用いて被測定点の座標を近似計算する過程と、
近似計算の誤差範囲内で第2撮像手段からの画像情報を用いて被測定点を検出する過程と、
第1及び第2撮像手段の注視線を、アクチュエータを用いて検出された被測定点に合わせる過程と、
回転角センサで測定される回転角を用いて三角測量の原理により被測定点の3次元座標を算出する過程と、
を具備することを特徴とする3次元座標測定方法。
【請求項2】
請求項1に記載の測定方法において、前記被測定点を検出する過程は、近似計算の誤差範囲が第2撮像手段の視野から外れているときには、第2撮像手段の視野内に誤差範囲が入るようにアクチュエータを制御する過程を有することを特徴とする3次元座標測定方法。
【請求項3】
請求項1又は請求項2に記載の測定方法において、前記被測定点を検出する過程は、近似計算の誤差範囲が第2撮像手段の視野よりも大きいときには、第2撮像手段の視野が誤差範囲内を探索するようにアクチュエータを制御する過程を有することを特徴とする3次元座標測定方法。
【請求項4】
請求項1乃至請求項3の何れかに記載の測定方法において、前記近似計算する過程は、第1撮像手段の光軸を振動させ、そのときに出力される複数枚の画像情報から三角測量の原理により座標を近似計算する過程であることを特徴とする3次元座標測定方法。
【請求項5】
請求項1乃至請求項3の何れかに記載の測定方法において、前記近似計算する過程は、被測定点に第1撮像手段のピントを合わせたときの焦点距離を用いることを特徴とする3次元座標測定方法。
【請求項6】
請求項1乃至請求項5の何れかに記載の測定方法において、前記撮像手段はズーム機能を有し、該ズーム機能の広角側で撮像手段の注視線を被測定点に合わせた後に、ズーム機能の狭角側で撮像手段の注視線を被測定点に再度合わせることを特徴とする3次元座標測定方法。
【請求項7】
請求項1乃至請求項6の何れかに記載の測定方法であって、さらに、前記第1及び第2撮像手段を載置する基盤を1自由度以上回転又は並進運動させることを特徴とする3次元座標測定方法。
【請求項8】
請求項7に記載の測定方法であって、さらに、前記基盤の回転角又は並進運動距離を測定することを特徴とする3次元座標測定方法。
【請求項9】
請求項7又は請求項8に記載の測定方法であって、さらに、前記基盤の回転加速度を測定することを特徴とする3次元座標測定方法。
【請求項10】
請求項7乃至請求項9の何れかに記載の測定方法であって、さらに、前記基盤の並進加速度を測定することを特徴とする3次元座標測定方法。
【請求項11】
請求項8乃至請求項10の何れかに記載の測定方法において、前記基盤の回転角、回転加速度又は並進加速度と、回転角センサからの撮像手段の回転角とを用いて、基盤の回転又は並進運動により生ずる画像情報のずれを補償するために、アクチュエータで撮像手段の視野を制御することを特徴とする3次元座標測定方法。
【請求項12】
請求項7乃至請求項11の何れかに記載の測定方法であって、さらに、前記基盤の水平度を測定することを特徴とする3次元座標測定方法。
【請求項13】
請求項1乃至請求項12の何れかに記載の測定方法であって、さらに、前記第1及び第2撮像手段よりも画角の広い広角撮像手段を用いて被測定点を撮影することを特徴とする3次元座標測定方法。
【請求項14】
請求項13に記載の測定方法において、前記広角撮像手段は、第1撮像手段と第2撮像手段とを結ぶ線の略中心近傍に設けられることを特徴とする3次元座標測定方法。
【請求項15】
請求項1乃至請求項14の何れかに記載の測定方法であって、さらに、前記第1及び第2撮像手段の間の距離を調整することを特徴とする3次元座標測定方法。
【請求項16】
請求項1乃至請求項15の何れかに記載の測定方法であって、さらに、前記測定装置の位置を所定の座標系に特定するために、第1及び第2撮像手段により識別可能な所定の位置に設けられる位置認識標識を撮影することを特徴とする3次元座標測定方法。
【請求項17】
請求項1乃至請求項16の何れかに記載の測定方法であって、さらに、被測定点に当接させる棒状体と第1及び第2撮像手段により識別可能な、棒状体に設けられる標識手段とを有する狭所位置測定棒を用いて、被測定点の座標を測定することを特徴とする3次元座標測定方法。
【請求項18】
請求項1乃至請求項17の何れかに記載の測定方法において、前記第1撮像手段は近傍配置される少なくとも2つのカメラからなり、前記第2撮像手段は第1撮像手段に対して遠隔配置されることを特徴とする3次元座標測定方法。
【請求項19】
請求項16乃至請求項18の何れかに記載の測定方法において、運動物体上に載置される前記測定装置を少なくとも2つ用い、一方の測定装置は前記位置認識標識を撮影し、他方の測定装置は被測定点の座標を測定することを特徴とする3次元座標測定方法。
【請求項20】
請求項19に記載の測定方法において、前記一方の測定装置は、その視野から位置認識標識が外れる前に、他方の測定装置が他の位置識別標識を検出し、検出された他の位置識別標識の位置座標を一方の測定装置に伝達し、一方の測定装置は他の位置識別標識に視野を移動することを特徴とする3次元座標測定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−93479(P2007−93479A)
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願番号】特願2005−285296(P2005−285296)
【出願日】平成17年9月29日(2005.9.29)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願日】平成17年9月29日(2005.9.29)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
[ Back to top ]