
3次元形状の骨格モデル作成方法及び装置並びに3次元形状の寸法測定方法及び装置
【課題】本発明は、対象物体の3次元形状データに基づいてその特徴的な部位を正確に設定できる3次元形状の骨格モデルの作成方法及び装置並びに骨格モデルを用いた3次元形状の寸法測定方法及び装置を提供することを目的とするものである。
【解決手段】骨格モデル作成装置の制御部1は、対象物体表面の3次元形状データを取得するデータ取得部10、取得した3次元形状データを主成分分析により主軸を算出して予め設定された座標軸方向に主軸が一致するように座標変換処理を行う正規化処理部11、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する輪郭抽出部12、抽出した各輪郭形状データに対して中心軸変換処理を行って点集合で表現した中心軸データを抽出する中心軸抽出部13、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部14を備えている。
【解決手段】骨格モデル作成装置の制御部1は、対象物体表面の3次元形状データを取得するデータ取得部10、取得した3次元形状データを主成分分析により主軸を算出して予め設定された座標軸方向に主軸が一致するように座標変換処理を行う正規化処理部11、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する輪郭抽出部12、抽出した各輪郭形状データに対して中心軸変換処理を行って点集合で表現した中心軸データを抽出する中心軸抽出部13、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部14を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、3次元形状を撮影した画像データに基づく骨格モデルの作成方法及び装置並びに骨格モデルを用いた3次元形状の寸法測定方法及び装置に関する。
【背景技術】
【0002】
3次元形状を定量的に把握する場合、撮影画像の高精細化及び高精度化並びに画像処理技術の高速化及び大容量化に伴って3次元形状を撮影した画像に基づいて行われるようになってきている。
【0003】
例えば、人体を複数の方向から撮影した画像データに基づいて採寸データを定量的に測定することが提案されている。特許文献1では、測定対象となる物体に格子パターンを投影して物体表面に観測される変形格子像を撮影し、撮影された変形格子像と測定物体の表面の3次元座標とを関係式により処理することで、変形格子像の格子線の座標から測定物体の表面の3次元座標を抽出し、人体を3次元的に計測することが記載されている。また、特許文献2では、3次元表面形状を作成するために対象を複数の方向から撮影し、撮影された2次元画像データについて採寸部位を指定し、指定した採寸部位に対応する3次元位置を算出して3次元位置近傍の3次元形状データを作成し、得られた3次元形状データの周囲長を算出して採寸部位のサイズを算出することが記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第2868985号公報
【特許文献2】特開2003−269921号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した特許文献では、人体の3次元形状を複数の方向から撮影した画像を用いて人体表面の3次元座標を算出して3次元形状を定量的に把握することが可能となっているが、算出された3次元座標に基づいて3次元形状の特徴的な部位が明確に定義されていないため、バスト、ウエスト等の特徴的な部位における採寸位置がユーザーによってバラツキが生じるようになる。そのため、3次元形状の特徴的な部位における正確な寸法測定を行うことができない、といった問題点がある。
【0006】
そこで、本発明は、対象物体の3次元形状データに基づいてその特徴的な部位を正確に設定できる3次元形状の骨格モデルの作成方法及び装置並びに骨格モデルを用いた3次元形状の寸法測定方法及び装置を提供することを目的とするものである。
【課題を解決するための手段】
【0007】
本発明に係る3次元形状の骨格モデル作成方法は、プログラムされたコンピュータによって対象物体の3次元形状データから骨格モデルを作成する3次元形状の骨格モデル作成方法であって、対象物体表面の3次元座標位置からなる3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応して抽出された輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出するステップと、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成するステップとを前記コンピュータに実行させることを特徴とする。
【0008】
本発明に係る3次元形状の骨格モデル作成装置は、対象物体表面の3次元座標位置からなる3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応して抽出された輪郭形状データに対して中心軸変換処理を行って点集合で表現した中心軸データを抽出する中心軸抽出部と、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部とを備えていることを特徴とする。
【0009】
本発明に係るプログラムは、対象物体の3次元形状データから骨格モデルを作成する3次元形状の骨格モデル作成装置を機能させるためのプログラムであって、前記骨格モデル作成装置を、対象物体表面の3次元座標位置からなる3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応して抽出された輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出する手段、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する手段として機能させることを特徴とする。
【0010】
本発明に係る3次元形状の寸法測定方法は、プログラムされたコンピュータによって対象物体の3次元形状データから所定部位の寸法を測定する3次元形状の寸法測定方法であって、対象物体表面の3次元座標位置からなる3次元形状データを主成分分析により主軸を算出して測定空間の所定の座標軸方向に主軸が一致するように座標変換して正規化処理を行うステップと、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出するステップと、抽出した各輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出するステップと、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成するステップと、前記輪郭形状データ及び前記骨格モデルデータに基づいて所定部位位置を特定するステップと、特定された所定部位位置及び前記3次元形状データに基づいて所定部位の寸法データを算出するステップとを前記コンピュータに実行させることを特徴とする。
【0011】
本発明に係る3次元形状の寸法測定装置は、対象物体表面の3次元座標位置からなる3次元形状データを主成分分析により主軸を算出して測定空間の所定の座標軸方向に主軸が一致するように座標変換処理を行う正規化処理部と、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する輪郭抽出部と、抽出した各輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出する中心軸抽出部と、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部と、前記輪郭形状データ及び前記骨格モデルデータに基づいて所定部位位置を特定する位置特定部と、特定された所定部位位置及び前記3次元形状データに基づいて所定部位の寸法データを算出する寸法算出部とを備えていることを特徴とする。
【0012】
本発明に係る別のプログラムは、対象物体の3次元形状データから所定部位の寸法を測定する3次元形状の寸法測定装置を機能させるためのプログラムであって、前記寸法測定装置を、対象物体表面の3次元座標位置からなる3次元形状データを主成分分析により主軸を算出して測定空間の所定の座標軸方向に主軸が一致するように座標変換して正規化処理を行う手段、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する手段、抽出した各輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出する手段、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する手段、前記輪郭形状データ及び前記骨格モデルデータに基づいて所定部位位置を特定する手段、特定された所定部位位置及び前記3次元形状データに基づいて所定部位の寸法データを算出する手段として機能させることを特徴とする。
【発明の効果】
【0013】
本発明は、上記の構成を有することで、対象物体の3次元形状データに基づいてその特徴的な部位を正確に設定することができる。特に、対象物体が人体又は人体に類似の3次元形状である場合に、抽出した骨格モデルデータに基づいて客観的に特徴的な部位を設定でき、ユーザによる設定のバラツキをなくして統一した設定基準により特徴的な部位の位置を客観的に特定することができる。
【図面の簡単な説明】
【0014】
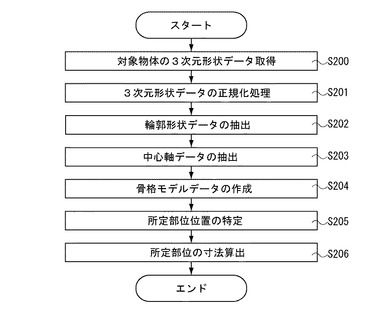
【図1】本発明に係る3次元形状の骨格モデル作成方法に関する全体処理フローである。
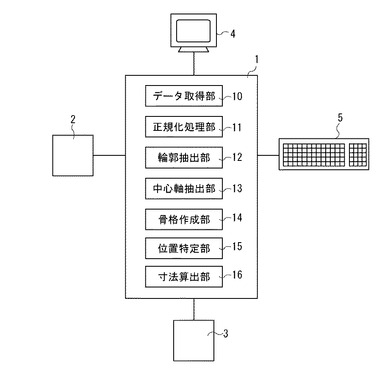
【図2】図1に示す方法を実施するための3次元形状の骨格モデル作成装置に関するブロック構成図である。
【図3】取得した3次元形状データを表示する斜視図である。
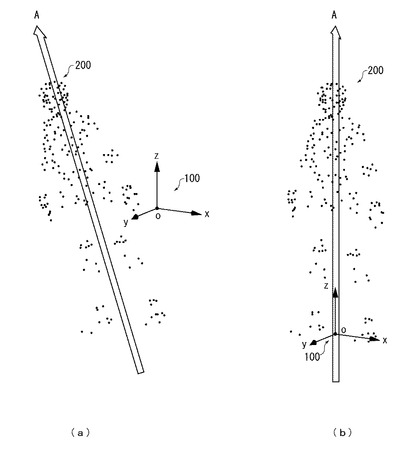
【図4】正規化処理について模式的に示す説明図である。
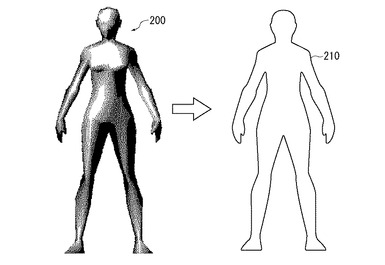
【図5】人体を正面から見た場合の輪郭形状データの抽出処理に関する説明図である。
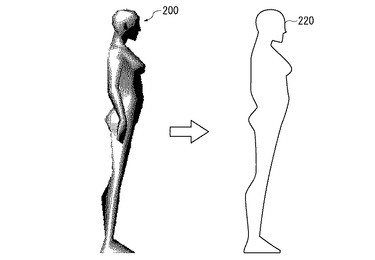
【図6】人体を側面から見た場合の輪郭形状データの抽出処理に関する説明図である。
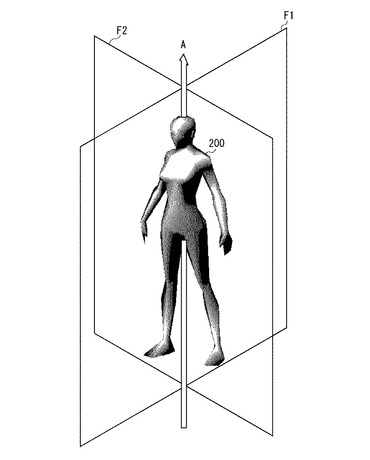
【図7】3次元形状データに対して主軸を通る2つの直交する平面により切断した状態に関する説明図である。
【図8】ボロノイ分割処理による中心軸データの抽出処理及び特徴点に関する説明図である。
【図9】抽出された中心軸データ及び特徴点に関する説明図である。
【図10】本発明に係る3次元形状の寸法測定方法に関する全体処理フローである。
【図11】図10に示す方法を実施するための3次元形状の寸法測定装置に関するブロック構成図である。
【図12】胸部位置及び腰部位置を特定する場合に関する説明図である。
【図13】胴部位置を特定する場合に関する説明図である。
【図14】胸部位置における寸法算出に関する説明図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施形態について図面を用いて説明する。なお、以下に説明する実施形態は、本発明を実施するにあたって好ましい具体例であるから、技術的に種々の限定がなされているが、本発明は、以下の説明において特に本発明を限定する旨明記されていない限り、これらの形態に限定されるものではない。
【0016】
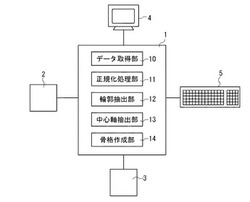
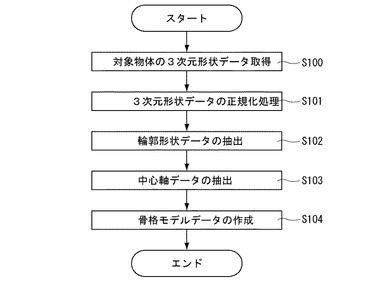
図1は、本発明に係る3次元形状の骨格モデル作成方法に関する全体処理フローであり、図2は、図1に示す方法を実施するための3次元形状の骨格モデル作成装置に関するブロック構成図である。
【0017】
骨格モデル作成装置は、装置全体の制御処理及び骨格モデル作成のための情報処理を行う制御部1、外部装置との間で対象物体の撮影画像や3次元形状データ等の情報を送受信する送受信部2、基本ソフト(OS)とともに骨格モデル作成のためのプログラムを保存する記憶部3、各種情報処理の出力結果を表示する表示部4、各種情報処理及び制御処理に必要なデータを入力する操作入力部5を備えている。必要に応じて撮影装置等の周辺装置を接続するための接続部を設けるようにしてもよい。
【0018】
制御部1は、対象物体表面の3次元座標位置からなる3次元形状データを取得するデータ取得部10、取得した3次元形状データを主成分分析により主軸を算出して予め設定された座標軸方向に主軸が一致するように座標変換処理を行う正規化処理部11、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する輪郭抽出部12、抽出した各輪郭形状データに対して中心軸変換処理を行って点集合で表現した中心軸データを抽出する中心軸抽出部13、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部14を備えている。
【0019】
こうしたブロック構成を備えた装置は、公知のコンピュータを用いて実現できる。例えば、制御部1に対応するCPU及びメモリ、送受信部2に対応するLANボード、記憶部3に対応するハードディスク、表示部4に対応する液晶表示パネル等のディスプレイ、入力部5に対応するキーボード及びマウス、といった公知のハードウェアをデータ伝送路により互いに接続したコンピュータを用いればよい。
【0020】
骨格モデルを作成する場合、まず、対象物体の3次元形状データを取得する(S100)。ここで、3次元形状データとは、対象物体について表面全体の3次元座標位置からなるデータであり、対象物体の内部に空洞がある場合には内側表面の3次元座標位置を含むものである。3次元形状データは、外部装置から送受信部2を介して取得するようにしてもよいし、骨格モデル作成装置に3Dスキャナやカメラ等の撮影装置を接続して撮影画像から公知の手法で対象物体の表面形状に対応した3次元形状データを取得するようにしてもよい。
【0021】
たとえば、一般的な3Dスキャナを用いることで対象物体の表面形状に対応する3次元形状データを直接取得してもよいし、スリット光とカメラを用いて対象物体表面の凹凸を撮影しその撮影画像から3次元形状データを作成するようにしてもよい。また、対象物体を複数方向からカメラで撮影し、得られた複数の2次元撮像画像から対象物体表面の3次元位置を抽出して3次元形状データを作成するようにしてもよい。
【0022】
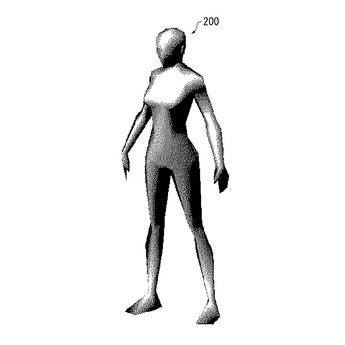
3次元形状データの取得については、対象物体表面の3次元形状データが取得できればよく、その取得方法については特に限定されない。図3は、取得した3次元形状データを表示する斜視図である。図3では、対象物体として人体を用いており、正立した状態の人体について人体表面の3次元形状データを取得している。
【0023】
こうした3次元形状データの取得処理は、データ取得部10で行われる。
【0024】
取得した3次元形状データに対して正規化処理を行う(S101)。正規化処理を行うことで、3次元形状データから、対象物体の姿勢や設置位置等の変動要素を取り除くことができる。正規化処理としては、3次元形状データの座標位置に対して主成分分析を行うことで3次元形状データにおける主軸を設定し、主軸及び予め設定された座標軸の方向が一致するように座標変換を行う。こうした正規化処理を行うことで、様々な3次元形状データを統一した座標空間に設定することができ、異なる3次元形状データを比較分析する場合などに有効である。
【0025】
図4は、正規化処理について模式的に示す説明図である。互いに直交するxyz軸からなる直交座標系で表わされる座標空間100に対して3次元形状データ200の3次元座標位置をプロットし、3次元形状データ200の主成分分析を行って第1主成分を求め、第1主成分に基づいて主軸Aを設定する(図4(a))。そして、主軸Aが直交座標系のz軸と一致するように3次元形状データ200の座標変換を行う(図4(b))。この場合、人体の3次元形状データを対象としていることから、3次元形状データの最も低い位置をz=0として原点Oと同じ高さに設定するとよい。
【0026】
こうした3次元形状データの正規化処理は、正規化処理部11で行われる。
【0027】
次に、正規化処理した3次元形状データについて輪郭形状データを抽出する(S102)。輪郭形状データとしては、対象物体を所定の方向から平行投影したシルエット形状又は所定の方向に沿って対象物体を切断した断面形状を点集合により表現したものが挙げられる。対象物体の内部が空洞になっているような場合には、断面形状を輪郭形状データとして用いることが好ましい。また、シルエット形状及び断面形状の両方を輪郭形状データとして抽出してもよい。
【0028】
シルエット形状を抽出する場合には、例えば、対象物体の正面及び側面といった複数の方向からの対象物体を平面に平行投影し、投影された像の外形からシルエット形状を抽出することで、異なる複数の方向からみた複数の輪郭形状データを抽出する。
【0029】
図5は、対象物体である人体の正面から見た場合の輪郭形状データの抽出処理に関する説明図である。正規化処理された3次元形状データを人体の正面方向として設定された方向から見た状態にセットしてそのシルエット形状を輪郭形状データ210として抽出する。
【0030】
図6は、図5と同様に人体を側面から見た場合の輪郭形状データの抽出処理に関する説明図である。正規化処理された3次元形状データを人体の正面方向と直交する側面方向から見た状態にセットしてそのシルエット形状を輪郭形状データ220として抽出する。
【0031】
なお、輪郭形状データについては、上述した抽出処理以外に、例えば対象物体を複数方向からカメラで撮影した撮像画像を用いて対象物体の輪郭線を抽出して取得するようにしてもよい。
【0032】
また、対象物体が、例えばコップなどのように内側に空洞が形成されたものである場合には、上述したシルエット形状では対象物体の正確な輪郭形状データを得ることができないので、対象物体の3次元形状データから断面形状を輪郭形状データとして抽出することで、内部の空洞を正確に表現した輪郭形状データを得ることができる。対象物体の断面形状としては、例えば3次元形状データの主軸を含む平面で切断した断面形状を用いるとよい。図7は、3次元形状データ200に対して主軸Aを通る2つの直交する平面F1及びF2により切断した状態に関する説明図である。こうした2つの平面で切断した断面形状を輪郭形状データとして抽出するようにすればよい。
【0033】
なお、対象物体の形状が単純な形状(例えば、円柱状に近い形状のもの)である場合には、ステップS100の3次元形状データの取得及びステップS101の正規化処理を行わずに、カメラを用いた撮像画像から直接対象物体の輪郭線を抽出した形状を輪郭形状データとして抽出してもよい。
【0034】
また、抽出した輪郭形状データのノイズや方向の違いによる微妙な形状の差異は、後述する中心軸抽出処理が行われる際に取り除かれるため、抽出する方向を決められた方向に正確に合わせる必要はない。
【0035】
こうした3次元形状データからの輪郭形状データの抽出処理は、輪郭抽出部12で行われる。
【0036】
次に、抽出した輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出する処理を行う(S103)。上述の3次元形状データから抽出した複数の輪郭形状データに対して中心軸変換処理を行い、各輪郭形状データの中心軸データを抽出する。中心軸変換処理については、ボロノイ分割を用いる方法や細線化を用いる方法のように公知の処理方法を用いればよい。
【0037】
この例ではボロノイ分割を用いた方法により中心軸データの抽出を行う。ボロノイ分割とは、隣り合う母点間を結ぶ直線に垂直二等分線を引くことで、各母点の最近隣領域を分割する手法であり、この例では輪郭形状データを構成する点集合を母点としてボロノイ分割を行う。
【0038】
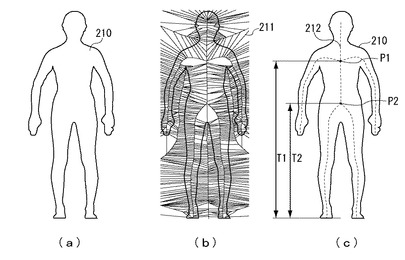
例えば、図8(a)は、対象物体である人体を正面から見て抽出された輪郭形状データ210であり、図8(b)は、輪郭形状データ210に対してボロノイ分割処理を行ってボロノイ辺211により分割した図である。
【0039】
輪郭形状データの中心軸データを抽出する場合には、図8(b)に示すボロノイ辺211のうち、輪郭形状データによるシルエット形状に対応する輪郭線と交わらないボロノイ辺だけを残す枝刈り処理を行う。図8(c)は、枝刈り処理後に得られる中心軸データ212を示している。
【0040】
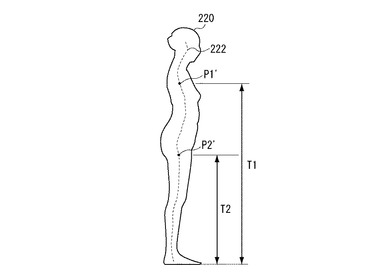
図9は、対象物体である人体を側面から見て抽出された輪郭形状データ220について図8と同様に中心軸変換処理を行って抽出した中心軸データ222を示している。
【0041】
以上のように、複数の異なる方向から見た輪郭形状データについてそれぞれ中心軸データを抽出する処理を行う。こうした中心軸変換処理は、中心軸抽出部13で行われる。
【0042】
次に、抽出された中心軸データを特徴点で関連付けた骨格モデルデータを作成する(S104)。
【0043】
図8(c)に示すように、抽出した中心軸データ212には結節していることを示す特徴点として結節点P1及びP2が存在する。そして、結節点P1及びP2は、それぞれ高さT1及びT2の位置に設定されている。
【0044】
図9に示す中心軸データ222についても、高さT1及びT2の位置に結節点P1及びP2に対応する特徴点P1’及びP2’を設定する。このように複数の異なる方向から見た複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する。このように、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータの作成処理は、骨格作成部14で行われる。
【0045】
こうして得られた骨格モデルデータは、対象物体を複数の異なる方向から見た3次元的な分析を行うことが可能となり、正確な分析を行うことができる。例えば、2つの対象物体の形状について同定を行う場合、上述した骨格モデルデータを比較することで形状の同定処理を高速で正確に行うことができる。また、対象物体が人体の場合には、骨格モデルデータを解析すれば人体の姿勢を判定することができ、例えば結節点P1及びP2の位置関係により正立状態か前傾状態かを判定したり、結節点P2とそれより下の中心軸との前後関係を分析することで脚部の屈曲姿勢を高速で判定することが可能となる。
【0046】
また、骨格モデルデータの特徴点に基づいて測定部位位置を特定して対象物体の寸法測定を行うことで、バラツキのない客観的な測定を行うことができる。
【0047】
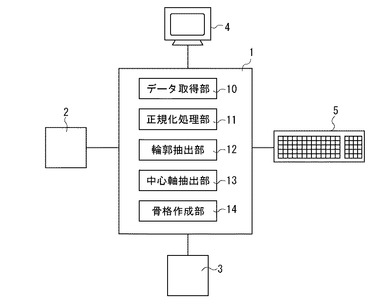
図10は、本発明に係る3次元形状の寸法測定方法に関する全体処理フローであり、図11は、図10に示す方法を実施するための3次元形状の寸法測定装置に関するブロック構成図である。
【0048】
寸法測定装置は、図2に示す骨格モデル作成装置と同様の装置構成を備えている。そして、制御部1は、骨格モデル作成装置と同様のデータ取得部10、正規化処理部11、輪郭抽出部12、中心軸抽出部13、骨格作成部14を備えているとともに、骨格モデルデータの特徴点から測定する所定部位位置を特定する位置特定部15、特定された測定部位における3次元形状データを用いて寸法を算出する寸法算出部16を備えている。
【0049】
処理フローにおいてステップS200からS204までは、図1に示すステップS100からS104までと同様の処理を行う。ステップS201の正規化処理において、互いに直交するxyz軸からなる直交座標系で表わされる座標空間を測定空間とする。そして、ステップS204では、ステップS104と同様に、骨格モデルデータは、複数の異なる方向からみた輪郭形状データからそれぞれ抽出した複数の中心軸データを結節点P1及びP2を特徴点として関連付けて作成される。
【0050】
次に、骨格モデルデータ及び輪郭形状データを用いて所定部位位置を特定する(S205)。この例では、対象物体である人体の胸部、胴部及び腰部の部位位置をそれぞれ特定する。
【0051】
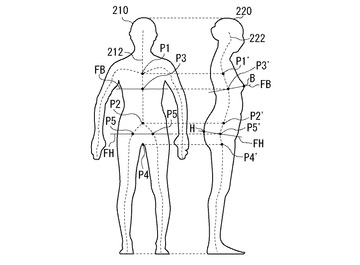
図12は、胸部位置及び腰部位置を特定する場合に関する説明図である。胸部位置については、特徴点である結節点P1及びP2の間において、側面から見た輪郭形状データを用いてそのシルエット形状の正面側での水平方向(xy平面方向)への最突出点を通り中心軸と直交する平面と、中心軸とが交差する位置を胸部位置とする。
【0052】
図12に示すように、側面から見た輪郭形状データ220の中心軸222において結節点P1及びP2と関連付けられた特徴点P1’及びP2’の間で、正面側の水平方向の最突出点Bを決定する。そして、最突出点Bを通り、中心軸222と直交する平面FBと、中心軸とが交差する位置を胸部位置(特徴点P3’)として特定する。また、中心軸222において平面FBと交差する特徴点P3’と高さが一致するように関連付けられた中心軸212の特徴点P3を設定し、中心軸212と直交する平面FBを設定する。
【0053】
腰部位置については、特徴点である結節点P2と股点P4との間において、側面から見た輪郭形状データを用いてそのシルエット形状の背面側での水平方向(xy平面方向)への最突出点を通り中心軸と直交する平面と、中心軸とが交差する位置を腰部位置とする。
【0054】
図12に示すように、輪郭形状データ210において、結節点P2より分岐する中心軸の間において輪郭形状データの最も高い位置を股点P4として設定する。そして、股点P4と高さが一致するように関連付けられた中心軸222の特徴点P4’を設定し、特徴点P2’とP4’との間で、輪郭形状データ220の背面側の水平方向の最突出点Hを決定する。そして、最突出点Hを通り、中心軸222と直交する平面FHと交差する位置を腰部位置として特定する。また、中心軸222において平面FHと交差する特徴点P5’と高さが一致するように関連付けられた中心軸212の特徴点P5を設定し、中心軸212と直交する平面FHを設定する。
【0055】
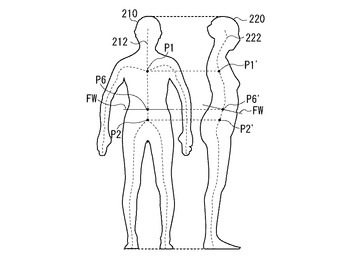
胴部位置については、結節点P1及びP2の間において、3次元形状データを用いて中心軸212及び222に対して直交する平面で切断した断面形状の周囲長を算出し、周囲長が最も短い平面と中心軸とが交差する位置を胴部位置として特定する。図13は、胴部位置を特定する場合に関する説明図である。中心軸212に設定された結節点P1及びP2の間において、中心軸212に直交する法線及び中心軸222に直交する法線を含む平面を3次元形状データの切断面として用い、その断面形状の周囲長が最も短い平面FWと交差する位置を胴部位置として特定する。また、中心軸212において平面FWと交差する特徴点P6及び中心軸222において平面FWと交差する特徴点P6’を設定する。
【0056】
以上のように、3次元形状データ、輪郭形状データ及び骨格モデルデータを用いて、中心軸に設定された特徴点に基づいて所定部位の位置を特定しているので、測定部位がばらつくことなく一意的に決めることができる。そのため、複数の利用者が寸法測定を行う場合でも、各利用者間で測定部位位置をばらつくことなく設定して寸法測定が可能となる。
【0057】
所定部位位置の特定方法については、上述した方法以外にも、所定部位位置を予め設定した基準物体の3次元形状データを用意し、測定する対象物体及び基準物体の輪郭形状データ及び骨格モデルデータをパターンマッチング処理して、基準物体に設定した所定部位位置に最も一致度が高い対象物体の位置を所定部位位置として特定することもできる。
【0058】
以上のように、輪郭形状データ及び骨格モデルデータに基づき、必要に応じて3次元形状データを用いて所定部位位置を特定する処理は、位置特定部15で行われる。
【0059】
次に、特定した所定部位位置において寸法を算出する(S206)。所定部位位置における寸法の算出は、所定部位に対応して算出方法が異なるが、この例では、対象物体である人体に合致した衣服の作成に必要な寸法算出を行う場合について説明する。この場合の寸法の算出では、3次元形状データの所定部位位置での周囲長を算出する方法及び特徴点の間又は所定部位位置の間の長さを算出する方法が用いられる。
【0060】
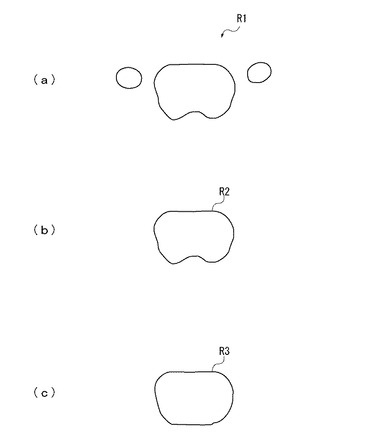
所定部位位置の周囲長を算出する方法として、胸部位置で算出する例を説明する。図12に示すように、特徴点P3及びP3’を通る平面FBと交差する胸部位置での3次元形状データを用いる。図14は、胸部位置における寸法算出に関する説明図である。まず、図14(a)に示すように、胸部位置での3次元形状データに基づいて平面FBに沿う断面形状R1を得る。次に、断面形状R1のうち最も周囲長の大きい形状R2を抽出し(図14(b))、形状R2を形成する点集合について凸包を描画して、凸多角形R3に変換する。周囲長は凸多角形R3の頂点の座標から各辺の長さの総和を算出する。算出された周囲長が胸囲の寸法値となる。同様の算出方法を用いることで、胴部位置の胴囲や腰部位置の腰囲についても算出することができる。
【0061】
特徴点の間又は所定部位位置の間の長さを算出する方法としては、例えば、人体の身長の場合には、輪郭形状データを形成する点集合の中で高さ方向(z軸方向)の最小値及び最大値となる点との間の高さ方向の長さを算出すればよく、股下高の場合には、同様に、図12に示す股点P4と高さ方向の最小値となる点との間の高さ方向の長さを算出すればよい。肩幅等の部位についても部位位置を特定する特徴点を輪郭形状データ及び骨格作成データに基づいて設定しておき、設定された特徴点に基づいて3次元形状データを用い寸法を算出するようにすればよい。
【0062】
以上のように、特定された所定部位位置及び3次元形状データに基づいて所定部位の寸法データを算出する処理は、寸法算出部16で行われる。
【符号の説明】
【0063】
1 制御部
2 送受信部
3 記憶部
4 表示部
5 操作入力部
【技術分野】
【0001】
本発明は、3次元形状を撮影した画像データに基づく骨格モデルの作成方法及び装置並びに骨格モデルを用いた3次元形状の寸法測定方法及び装置に関する。
【背景技術】
【0002】
3次元形状を定量的に把握する場合、撮影画像の高精細化及び高精度化並びに画像処理技術の高速化及び大容量化に伴って3次元形状を撮影した画像に基づいて行われるようになってきている。
【0003】
例えば、人体を複数の方向から撮影した画像データに基づいて採寸データを定量的に測定することが提案されている。特許文献1では、測定対象となる物体に格子パターンを投影して物体表面に観測される変形格子像を撮影し、撮影された変形格子像と測定物体の表面の3次元座標とを関係式により処理することで、変形格子像の格子線の座標から測定物体の表面の3次元座標を抽出し、人体を3次元的に計測することが記載されている。また、特許文献2では、3次元表面形状を作成するために対象を複数の方向から撮影し、撮影された2次元画像データについて採寸部位を指定し、指定した採寸部位に対応する3次元位置を算出して3次元位置近傍の3次元形状データを作成し、得られた3次元形状データの周囲長を算出して採寸部位のサイズを算出することが記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第2868985号公報
【特許文献2】特開2003−269921号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した特許文献では、人体の3次元形状を複数の方向から撮影した画像を用いて人体表面の3次元座標を算出して3次元形状を定量的に把握することが可能となっているが、算出された3次元座標に基づいて3次元形状の特徴的な部位が明確に定義されていないため、バスト、ウエスト等の特徴的な部位における採寸位置がユーザーによってバラツキが生じるようになる。そのため、3次元形状の特徴的な部位における正確な寸法測定を行うことができない、といった問題点がある。
【0006】
そこで、本発明は、対象物体の3次元形状データに基づいてその特徴的な部位を正確に設定できる3次元形状の骨格モデルの作成方法及び装置並びに骨格モデルを用いた3次元形状の寸法測定方法及び装置を提供することを目的とするものである。
【課題を解決するための手段】
【0007】
本発明に係る3次元形状の骨格モデル作成方法は、プログラムされたコンピュータによって対象物体の3次元形状データから骨格モデルを作成する3次元形状の骨格モデル作成方法であって、対象物体表面の3次元座標位置からなる3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応して抽出された輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出するステップと、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成するステップとを前記コンピュータに実行させることを特徴とする。
【0008】
本発明に係る3次元形状の骨格モデル作成装置は、対象物体表面の3次元座標位置からなる3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応して抽出された輪郭形状データに対して中心軸変換処理を行って点集合で表現した中心軸データを抽出する中心軸抽出部と、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部とを備えていることを特徴とする。
【0009】
本発明に係るプログラムは、対象物体の3次元形状データから骨格モデルを作成する3次元形状の骨格モデル作成装置を機能させるためのプログラムであって、前記骨格モデル作成装置を、対象物体表面の3次元座標位置からなる3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応して抽出された輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出する手段、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する手段として機能させることを特徴とする。
【0010】
本発明に係る3次元形状の寸法測定方法は、プログラムされたコンピュータによって対象物体の3次元形状データから所定部位の寸法を測定する3次元形状の寸法測定方法であって、対象物体表面の3次元座標位置からなる3次元形状データを主成分分析により主軸を算出して測定空間の所定の座標軸方向に主軸が一致するように座標変換して正規化処理を行うステップと、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出するステップと、抽出した各輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出するステップと、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成するステップと、前記輪郭形状データ及び前記骨格モデルデータに基づいて所定部位位置を特定するステップと、特定された所定部位位置及び前記3次元形状データに基づいて所定部位の寸法データを算出するステップとを前記コンピュータに実行させることを特徴とする。
【0011】
本発明に係る3次元形状の寸法測定装置は、対象物体表面の3次元座標位置からなる3次元形状データを主成分分析により主軸を算出して測定空間の所定の座標軸方向に主軸が一致するように座標変換処理を行う正規化処理部と、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する輪郭抽出部と、抽出した各輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出する中心軸抽出部と、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部と、前記輪郭形状データ及び前記骨格モデルデータに基づいて所定部位位置を特定する位置特定部と、特定された所定部位位置及び前記3次元形状データに基づいて所定部位の寸法データを算出する寸法算出部とを備えていることを特徴とする。
【0012】
本発明に係る別のプログラムは、対象物体の3次元形状データから所定部位の寸法を測定する3次元形状の寸法測定装置を機能させるためのプログラムであって、前記寸法測定装置を、対象物体表面の3次元座標位置からなる3次元形状データを主成分分析により主軸を算出して測定空間の所定の座標軸方向に主軸が一致するように座標変換して正規化処理を行う手段、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する手段、抽出した各輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出する手段、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する手段、前記輪郭形状データ及び前記骨格モデルデータに基づいて所定部位位置を特定する手段、特定された所定部位位置及び前記3次元形状データに基づいて所定部位の寸法データを算出する手段として機能させることを特徴とする。
【発明の効果】
【0013】
本発明は、上記の構成を有することで、対象物体の3次元形状データに基づいてその特徴的な部位を正確に設定することができる。特に、対象物体が人体又は人体に類似の3次元形状である場合に、抽出した骨格モデルデータに基づいて客観的に特徴的な部位を設定でき、ユーザによる設定のバラツキをなくして統一した設定基準により特徴的な部位の位置を客観的に特定することができる。
【図面の簡単な説明】
【0014】
【図1】本発明に係る3次元形状の骨格モデル作成方法に関する全体処理フローである。
【図2】図1に示す方法を実施するための3次元形状の骨格モデル作成装置に関するブロック構成図である。
【図3】取得した3次元形状データを表示する斜視図である。
【図4】正規化処理について模式的に示す説明図である。
【図5】人体を正面から見た場合の輪郭形状データの抽出処理に関する説明図である。
【図6】人体を側面から見た場合の輪郭形状データの抽出処理に関する説明図である。
【図7】3次元形状データに対して主軸を通る2つの直交する平面により切断した状態に関する説明図である。
【図8】ボロノイ分割処理による中心軸データの抽出処理及び特徴点に関する説明図である。
【図9】抽出された中心軸データ及び特徴点に関する説明図である。
【図10】本発明に係る3次元形状の寸法測定方法に関する全体処理フローである。
【図11】図10に示す方法を実施するための3次元形状の寸法測定装置に関するブロック構成図である。
【図12】胸部位置及び腰部位置を特定する場合に関する説明図である。
【図13】胴部位置を特定する場合に関する説明図である。
【図14】胸部位置における寸法算出に関する説明図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施形態について図面を用いて説明する。なお、以下に説明する実施形態は、本発明を実施するにあたって好ましい具体例であるから、技術的に種々の限定がなされているが、本発明は、以下の説明において特に本発明を限定する旨明記されていない限り、これらの形態に限定されるものではない。
【0016】
図1は、本発明に係る3次元形状の骨格モデル作成方法に関する全体処理フローであり、図2は、図1に示す方法を実施するための3次元形状の骨格モデル作成装置に関するブロック構成図である。
【0017】
骨格モデル作成装置は、装置全体の制御処理及び骨格モデル作成のための情報処理を行う制御部1、外部装置との間で対象物体の撮影画像や3次元形状データ等の情報を送受信する送受信部2、基本ソフト(OS)とともに骨格モデル作成のためのプログラムを保存する記憶部3、各種情報処理の出力結果を表示する表示部4、各種情報処理及び制御処理に必要なデータを入力する操作入力部5を備えている。必要に応じて撮影装置等の周辺装置を接続するための接続部を設けるようにしてもよい。
【0018】
制御部1は、対象物体表面の3次元座標位置からなる3次元形状データを取得するデータ取得部10、取得した3次元形状データを主成分分析により主軸を算出して予め設定された座標軸方向に主軸が一致するように座標変換処理を行う正規化処理部11、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する輪郭抽出部12、抽出した各輪郭形状データに対して中心軸変換処理を行って点集合で表現した中心軸データを抽出する中心軸抽出部13、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部14を備えている。
【0019】
こうしたブロック構成を備えた装置は、公知のコンピュータを用いて実現できる。例えば、制御部1に対応するCPU及びメモリ、送受信部2に対応するLANボード、記憶部3に対応するハードディスク、表示部4に対応する液晶表示パネル等のディスプレイ、入力部5に対応するキーボード及びマウス、といった公知のハードウェアをデータ伝送路により互いに接続したコンピュータを用いればよい。
【0020】
骨格モデルを作成する場合、まず、対象物体の3次元形状データを取得する(S100)。ここで、3次元形状データとは、対象物体について表面全体の3次元座標位置からなるデータであり、対象物体の内部に空洞がある場合には内側表面の3次元座標位置を含むものである。3次元形状データは、外部装置から送受信部2を介して取得するようにしてもよいし、骨格モデル作成装置に3Dスキャナやカメラ等の撮影装置を接続して撮影画像から公知の手法で対象物体の表面形状に対応した3次元形状データを取得するようにしてもよい。
【0021】
たとえば、一般的な3Dスキャナを用いることで対象物体の表面形状に対応する3次元形状データを直接取得してもよいし、スリット光とカメラを用いて対象物体表面の凹凸を撮影しその撮影画像から3次元形状データを作成するようにしてもよい。また、対象物体を複数方向からカメラで撮影し、得られた複数の2次元撮像画像から対象物体表面の3次元位置を抽出して3次元形状データを作成するようにしてもよい。
【0022】
3次元形状データの取得については、対象物体表面の3次元形状データが取得できればよく、その取得方法については特に限定されない。図3は、取得した3次元形状データを表示する斜視図である。図3では、対象物体として人体を用いており、正立した状態の人体について人体表面の3次元形状データを取得している。
【0023】
こうした3次元形状データの取得処理は、データ取得部10で行われる。
【0024】
取得した3次元形状データに対して正規化処理を行う(S101)。正規化処理を行うことで、3次元形状データから、対象物体の姿勢や設置位置等の変動要素を取り除くことができる。正規化処理としては、3次元形状データの座標位置に対して主成分分析を行うことで3次元形状データにおける主軸を設定し、主軸及び予め設定された座標軸の方向が一致するように座標変換を行う。こうした正規化処理を行うことで、様々な3次元形状データを統一した座標空間に設定することができ、異なる3次元形状データを比較分析する場合などに有効である。
【0025】
図4は、正規化処理について模式的に示す説明図である。互いに直交するxyz軸からなる直交座標系で表わされる座標空間100に対して3次元形状データ200の3次元座標位置をプロットし、3次元形状データ200の主成分分析を行って第1主成分を求め、第1主成分に基づいて主軸Aを設定する(図4(a))。そして、主軸Aが直交座標系のz軸と一致するように3次元形状データ200の座標変換を行う(図4(b))。この場合、人体の3次元形状データを対象としていることから、3次元形状データの最も低い位置をz=0として原点Oと同じ高さに設定するとよい。
【0026】
こうした3次元形状データの正規化処理は、正規化処理部11で行われる。
【0027】
次に、正規化処理した3次元形状データについて輪郭形状データを抽出する(S102)。輪郭形状データとしては、対象物体を所定の方向から平行投影したシルエット形状又は所定の方向に沿って対象物体を切断した断面形状を点集合により表現したものが挙げられる。対象物体の内部が空洞になっているような場合には、断面形状を輪郭形状データとして用いることが好ましい。また、シルエット形状及び断面形状の両方を輪郭形状データとして抽出してもよい。
【0028】
シルエット形状を抽出する場合には、例えば、対象物体の正面及び側面といった複数の方向からの対象物体を平面に平行投影し、投影された像の外形からシルエット形状を抽出することで、異なる複数の方向からみた複数の輪郭形状データを抽出する。
【0029】
図5は、対象物体である人体の正面から見た場合の輪郭形状データの抽出処理に関する説明図である。正規化処理された3次元形状データを人体の正面方向として設定された方向から見た状態にセットしてそのシルエット形状を輪郭形状データ210として抽出する。
【0030】
図6は、図5と同様に人体を側面から見た場合の輪郭形状データの抽出処理に関する説明図である。正規化処理された3次元形状データを人体の正面方向と直交する側面方向から見た状態にセットしてそのシルエット形状を輪郭形状データ220として抽出する。
【0031】
なお、輪郭形状データについては、上述した抽出処理以外に、例えば対象物体を複数方向からカメラで撮影した撮像画像を用いて対象物体の輪郭線を抽出して取得するようにしてもよい。
【0032】
また、対象物体が、例えばコップなどのように内側に空洞が形成されたものである場合には、上述したシルエット形状では対象物体の正確な輪郭形状データを得ることができないので、対象物体の3次元形状データから断面形状を輪郭形状データとして抽出することで、内部の空洞を正確に表現した輪郭形状データを得ることができる。対象物体の断面形状としては、例えば3次元形状データの主軸を含む平面で切断した断面形状を用いるとよい。図7は、3次元形状データ200に対して主軸Aを通る2つの直交する平面F1及びF2により切断した状態に関する説明図である。こうした2つの平面で切断した断面形状を輪郭形状データとして抽出するようにすればよい。
【0033】
なお、対象物体の形状が単純な形状(例えば、円柱状に近い形状のもの)である場合には、ステップS100の3次元形状データの取得及びステップS101の正規化処理を行わずに、カメラを用いた撮像画像から直接対象物体の輪郭線を抽出した形状を輪郭形状データとして抽出してもよい。
【0034】
また、抽出した輪郭形状データのノイズや方向の違いによる微妙な形状の差異は、後述する中心軸抽出処理が行われる際に取り除かれるため、抽出する方向を決められた方向に正確に合わせる必要はない。
【0035】
こうした3次元形状データからの輪郭形状データの抽出処理は、輪郭抽出部12で行われる。
【0036】
次に、抽出した輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出する処理を行う(S103)。上述の3次元形状データから抽出した複数の輪郭形状データに対して中心軸変換処理を行い、各輪郭形状データの中心軸データを抽出する。中心軸変換処理については、ボロノイ分割を用いる方法や細線化を用いる方法のように公知の処理方法を用いればよい。
【0037】
この例ではボロノイ分割を用いた方法により中心軸データの抽出を行う。ボロノイ分割とは、隣り合う母点間を結ぶ直線に垂直二等分線を引くことで、各母点の最近隣領域を分割する手法であり、この例では輪郭形状データを構成する点集合を母点としてボロノイ分割を行う。
【0038】
例えば、図8(a)は、対象物体である人体を正面から見て抽出された輪郭形状データ210であり、図8(b)は、輪郭形状データ210に対してボロノイ分割処理を行ってボロノイ辺211により分割した図である。
【0039】
輪郭形状データの中心軸データを抽出する場合には、図8(b)に示すボロノイ辺211のうち、輪郭形状データによるシルエット形状に対応する輪郭線と交わらないボロノイ辺だけを残す枝刈り処理を行う。図8(c)は、枝刈り処理後に得られる中心軸データ212を示している。
【0040】
図9は、対象物体である人体を側面から見て抽出された輪郭形状データ220について図8と同様に中心軸変換処理を行って抽出した中心軸データ222を示している。
【0041】
以上のように、複数の異なる方向から見た輪郭形状データについてそれぞれ中心軸データを抽出する処理を行う。こうした中心軸変換処理は、中心軸抽出部13で行われる。
【0042】
次に、抽出された中心軸データを特徴点で関連付けた骨格モデルデータを作成する(S104)。
【0043】
図8(c)に示すように、抽出した中心軸データ212には結節していることを示す特徴点として結節点P1及びP2が存在する。そして、結節点P1及びP2は、それぞれ高さT1及びT2の位置に設定されている。
【0044】
図9に示す中心軸データ222についても、高さT1及びT2の位置に結節点P1及びP2に対応する特徴点P1’及びP2’を設定する。このように複数の異なる方向から見た複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する。このように、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータの作成処理は、骨格作成部14で行われる。
【0045】
こうして得られた骨格モデルデータは、対象物体を複数の異なる方向から見た3次元的な分析を行うことが可能となり、正確な分析を行うことができる。例えば、2つの対象物体の形状について同定を行う場合、上述した骨格モデルデータを比較することで形状の同定処理を高速で正確に行うことができる。また、対象物体が人体の場合には、骨格モデルデータを解析すれば人体の姿勢を判定することができ、例えば結節点P1及びP2の位置関係により正立状態か前傾状態かを判定したり、結節点P2とそれより下の中心軸との前後関係を分析することで脚部の屈曲姿勢を高速で判定することが可能となる。
【0046】
また、骨格モデルデータの特徴点に基づいて測定部位位置を特定して対象物体の寸法測定を行うことで、バラツキのない客観的な測定を行うことができる。
【0047】
図10は、本発明に係る3次元形状の寸法測定方法に関する全体処理フローであり、図11は、図10に示す方法を実施するための3次元形状の寸法測定装置に関するブロック構成図である。
【0048】
寸法測定装置は、図2に示す骨格モデル作成装置と同様の装置構成を備えている。そして、制御部1は、骨格モデル作成装置と同様のデータ取得部10、正規化処理部11、輪郭抽出部12、中心軸抽出部13、骨格作成部14を備えているとともに、骨格モデルデータの特徴点から測定する所定部位位置を特定する位置特定部15、特定された測定部位における3次元形状データを用いて寸法を算出する寸法算出部16を備えている。
【0049】
処理フローにおいてステップS200からS204までは、図1に示すステップS100からS104までと同様の処理を行う。ステップS201の正規化処理において、互いに直交するxyz軸からなる直交座標系で表わされる座標空間を測定空間とする。そして、ステップS204では、ステップS104と同様に、骨格モデルデータは、複数の異なる方向からみた輪郭形状データからそれぞれ抽出した複数の中心軸データを結節点P1及びP2を特徴点として関連付けて作成される。
【0050】
次に、骨格モデルデータ及び輪郭形状データを用いて所定部位位置を特定する(S205)。この例では、対象物体である人体の胸部、胴部及び腰部の部位位置をそれぞれ特定する。
【0051】
図12は、胸部位置及び腰部位置を特定する場合に関する説明図である。胸部位置については、特徴点である結節点P1及びP2の間において、側面から見た輪郭形状データを用いてそのシルエット形状の正面側での水平方向(xy平面方向)への最突出点を通り中心軸と直交する平面と、中心軸とが交差する位置を胸部位置とする。
【0052】
図12に示すように、側面から見た輪郭形状データ220の中心軸222において結節点P1及びP2と関連付けられた特徴点P1’及びP2’の間で、正面側の水平方向の最突出点Bを決定する。そして、最突出点Bを通り、中心軸222と直交する平面FBと、中心軸とが交差する位置を胸部位置(特徴点P3’)として特定する。また、中心軸222において平面FBと交差する特徴点P3’と高さが一致するように関連付けられた中心軸212の特徴点P3を設定し、中心軸212と直交する平面FBを設定する。
【0053】
腰部位置については、特徴点である結節点P2と股点P4との間において、側面から見た輪郭形状データを用いてそのシルエット形状の背面側での水平方向(xy平面方向)への最突出点を通り中心軸と直交する平面と、中心軸とが交差する位置を腰部位置とする。
【0054】
図12に示すように、輪郭形状データ210において、結節点P2より分岐する中心軸の間において輪郭形状データの最も高い位置を股点P4として設定する。そして、股点P4と高さが一致するように関連付けられた中心軸222の特徴点P4’を設定し、特徴点P2’とP4’との間で、輪郭形状データ220の背面側の水平方向の最突出点Hを決定する。そして、最突出点Hを通り、中心軸222と直交する平面FHと交差する位置を腰部位置として特定する。また、中心軸222において平面FHと交差する特徴点P5’と高さが一致するように関連付けられた中心軸212の特徴点P5を設定し、中心軸212と直交する平面FHを設定する。
【0055】
胴部位置については、結節点P1及びP2の間において、3次元形状データを用いて中心軸212及び222に対して直交する平面で切断した断面形状の周囲長を算出し、周囲長が最も短い平面と中心軸とが交差する位置を胴部位置として特定する。図13は、胴部位置を特定する場合に関する説明図である。中心軸212に設定された結節点P1及びP2の間において、中心軸212に直交する法線及び中心軸222に直交する法線を含む平面を3次元形状データの切断面として用い、その断面形状の周囲長が最も短い平面FWと交差する位置を胴部位置として特定する。また、中心軸212において平面FWと交差する特徴点P6及び中心軸222において平面FWと交差する特徴点P6’を設定する。
【0056】
以上のように、3次元形状データ、輪郭形状データ及び骨格モデルデータを用いて、中心軸に設定された特徴点に基づいて所定部位の位置を特定しているので、測定部位がばらつくことなく一意的に決めることができる。そのため、複数の利用者が寸法測定を行う場合でも、各利用者間で測定部位位置をばらつくことなく設定して寸法測定が可能となる。
【0057】
所定部位位置の特定方法については、上述した方法以外にも、所定部位位置を予め設定した基準物体の3次元形状データを用意し、測定する対象物体及び基準物体の輪郭形状データ及び骨格モデルデータをパターンマッチング処理して、基準物体に設定した所定部位位置に最も一致度が高い対象物体の位置を所定部位位置として特定することもできる。
【0058】
以上のように、輪郭形状データ及び骨格モデルデータに基づき、必要に応じて3次元形状データを用いて所定部位位置を特定する処理は、位置特定部15で行われる。
【0059】
次に、特定した所定部位位置において寸法を算出する(S206)。所定部位位置における寸法の算出は、所定部位に対応して算出方法が異なるが、この例では、対象物体である人体に合致した衣服の作成に必要な寸法算出を行う場合について説明する。この場合の寸法の算出では、3次元形状データの所定部位位置での周囲長を算出する方法及び特徴点の間又は所定部位位置の間の長さを算出する方法が用いられる。
【0060】
所定部位位置の周囲長を算出する方法として、胸部位置で算出する例を説明する。図12に示すように、特徴点P3及びP3’を通る平面FBと交差する胸部位置での3次元形状データを用いる。図14は、胸部位置における寸法算出に関する説明図である。まず、図14(a)に示すように、胸部位置での3次元形状データに基づいて平面FBに沿う断面形状R1を得る。次に、断面形状R1のうち最も周囲長の大きい形状R2を抽出し(図14(b))、形状R2を形成する点集合について凸包を描画して、凸多角形R3に変換する。周囲長は凸多角形R3の頂点の座標から各辺の長さの総和を算出する。算出された周囲長が胸囲の寸法値となる。同様の算出方法を用いることで、胴部位置の胴囲や腰部位置の腰囲についても算出することができる。
【0061】
特徴点の間又は所定部位位置の間の長さを算出する方法としては、例えば、人体の身長の場合には、輪郭形状データを形成する点集合の中で高さ方向(z軸方向)の最小値及び最大値となる点との間の高さ方向の長さを算出すればよく、股下高の場合には、同様に、図12に示す股点P4と高さ方向の最小値となる点との間の高さ方向の長さを算出すればよい。肩幅等の部位についても部位位置を特定する特徴点を輪郭形状データ及び骨格作成データに基づいて設定しておき、設定された特徴点に基づいて3次元形状データを用い寸法を算出するようにすればよい。
【0062】
以上のように、特定された所定部位位置及び3次元形状データに基づいて所定部位の寸法データを算出する処理は、寸法算出部16で行われる。
【符号の説明】
【0063】
1 制御部
2 送受信部
3 記憶部
4 表示部
5 操作入力部
【特許請求の範囲】
【請求項1】
プログラムされたコンピュータによって対象物体の3次元形状データから骨格モデルを作成する3次元形状の骨格モデル作成方法であって、
対象物体表面の3次元座標位置からなる3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応して抽出された輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出するステップと、
抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成するステップと
を前記コンピュータに実行させることを特徴とする3次元形状の骨格モデル作成方法。
【請求項2】
対象物体表面の3次元座標位置からなる3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応して抽出された輪郭形状データに対して中心軸変換処理を行って点集合で表現した中心軸データを抽出する中心軸抽出部と、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部とを備えていることを特徴とする3次元形状の骨格モデル作成装置。
【請求項3】
対象物体の3次元形状データから骨格モデルを作成する3次元形状の骨格モデル作成装置を機能させるためのプログラムであって、
前記骨格モデル作成装置を、
対象物体表面の3次元座標位置からなる3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応して抽出された輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出する手段、
抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する手段
として機能させるプログラム。
【請求項4】
プログラムされたコンピュータによって対象物体の3次元形状データから所定部位の寸法を測定する3次元形状の寸法測定方法であって、
対象物体表面の3次元座標位置からなる3次元形状データを主成分分析により主軸を算出して測定空間の所定の座標軸方向に主軸が一致するように座標変換して正規化処理を行うステップと、
正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出するステップと、
抽出した各輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出するステップと、
抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成するステップと、
前記輪郭形状データ及び前記骨格モデルデータに基づいて所定部位位置を特定するステップと、
特定された所定部位位置及び前記3次元形状データに基づいて所定部位の寸法データを算出するステップと
を前記コンピュータに実行させることを特徴とする3次元形状の寸法測定方法。
【請求項5】
対象物体表面の3次元座標位置からなる3次元形状データを主成分分析により主軸を算出して測定空間の所定の座標軸方向に主軸が一致するように座標変換処理を行う正規化処理部と、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する輪郭抽出部と、抽出した各輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出する中心軸抽出部と、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部と、前記輪郭形状データ及び前記骨格モデルデータに基づいて所定部位位置を特定する位置特定部と、特定された所定部位位置及び前記3次元形状データに基づいて所定部位の寸法データを算出する寸法算出部とを備えていることを特徴とする3次元形状の寸法測定装置。
【請求項6】
対象物体の3次元形状データから所定部位の寸法を測定する3次元形状の寸法測定装置を機能させるためのプログラムであって、
前記寸法測定装置を、
対象物体表面の3次元座標位置からなる3次元形状データを主成分分析により主軸を算出して測定空間の所定の座標軸方向に主軸が一致するように座標変換して正規化処理を行う手段、
正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する手段、
抽出した各輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出する手段、
抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する手段、
前記輪郭形状データ及び前記骨格モデルデータに基づいて所定部位位置を特定する手段、
特定された所定部位位置及び前記3次元形状データに基づいて所定部位の寸法データを算出する手段
として機能させるプログラム。
【請求項1】
プログラムされたコンピュータによって対象物体の3次元形状データから骨格モデルを作成する3次元形状の骨格モデル作成方法であって、
対象物体表面の3次元座標位置からなる3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応して抽出された輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出するステップと、
抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成するステップと
を前記コンピュータに実行させることを特徴とする3次元形状の骨格モデル作成方法。
【請求項2】
対象物体表面の3次元座標位置からなる3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応して抽出された輪郭形状データに対して中心軸変換処理を行って点集合で表現した中心軸データを抽出する中心軸抽出部と、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部とを備えていることを特徴とする3次元形状の骨格モデル作成装置。
【請求項3】
対象物体の3次元形状データから骨格モデルを作成する3次元形状の骨格モデル作成装置を機能させるためのプログラムであって、
前記骨格モデル作成装置を、
対象物体表面の3次元座標位置からなる3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応して抽出された輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出する手段、
抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する手段
として機能させるプログラム。
【請求項4】
プログラムされたコンピュータによって対象物体の3次元形状データから所定部位の寸法を測定する3次元形状の寸法測定方法であって、
対象物体表面の3次元座標位置からなる3次元形状データを主成分分析により主軸を算出して測定空間の所定の座標軸方向に主軸が一致するように座標変換して正規化処理を行うステップと、
正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出するステップと、
抽出した各輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出するステップと、
抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成するステップと、
前記輪郭形状データ及び前記骨格モデルデータに基づいて所定部位位置を特定するステップと、
特定された所定部位位置及び前記3次元形状データに基づいて所定部位の寸法データを算出するステップと
を前記コンピュータに実行させることを特徴とする3次元形状の寸法測定方法。
【請求項5】
対象物体表面の3次元座標位置からなる3次元形状データを主成分分析により主軸を算出して測定空間の所定の座標軸方向に主軸が一致するように座標変換処理を行う正規化処理部と、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する輪郭抽出部と、抽出した各輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出する中心軸抽出部と、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部と、前記輪郭形状データ及び前記骨格モデルデータに基づいて所定部位位置を特定する位置特定部と、特定された所定部位位置及び前記3次元形状データに基づいて所定部位の寸法データを算出する寸法算出部とを備えていることを特徴とする3次元形状の寸法測定装置。
【請求項6】
対象物体の3次元形状データから所定部位の寸法を測定する3次元形状の寸法測定装置を機能させるためのプログラムであって、
前記寸法測定装置を、
対象物体表面の3次元座標位置からなる3次元形状データを主成分分析により主軸を算出して測定空間の所定の座標軸方向に主軸が一致するように座標変換して正規化処理を行う手段、
正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する手段、
抽出した各輪郭形状データに対して中心軸変換処理を行って中心軸データを抽出する手段、
抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する手段、
前記輪郭形状データ及び前記骨格モデルデータに基づいて所定部位位置を特定する手段、
特定された所定部位位置及び前記3次元形状データに基づいて所定部位の寸法データを算出する手段
として機能させるプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−59082(P2012−59082A)
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願番号】特願2010−202507(P2010−202507)
【出願日】平成22年9月9日(2010.9.9)
【出願人】(000107907)セーレン株式会社 (462)
【Fターム(参考)】
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願日】平成22年9月9日(2010.9.9)
【出願人】(000107907)セーレン株式会社 (462)
【Fターム(参考)】
[ Back to top ]