
3次元形状測定装置
【課題】3次元形状の測定精度をより改善できる3次元形状測定装置を提供すること。
【解決手段】本発明の3次元測定装置は、測定対象物を固定するワークステージと、光源、光源から照射された光を透過させる格子及び格子の格子イメージを測定対象物に結像させる投影レンズを含み、測定対象物に対して格子イメージを第1方向にN回入射した後、測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、測定対象物によって反射される第1方向反射イメージ及び第2方向反射イメージを受信するイメージ取り込み装置と、イメージ取り込み装置に受信された第1方向反射イメージ及び第2方向反射イメージを用いて測定対象物の影領域を補償して測定対象物の3次元状態を算出する制御部と、を含む。
【解決手段】本発明の3次元測定装置は、測定対象物を固定するワークステージと、光源、光源から照射された光を透過させる格子及び格子の格子イメージを測定対象物に結像させる投影レンズを含み、測定対象物に対して格子イメージを第1方向にN回入射した後、測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、測定対象物によって反射される第1方向反射イメージ及び第2方向反射イメージを受信するイメージ取り込み装置と、イメージ取り込み装置に受信された第1方向反射イメージ及び第2方向反射イメージを用いて測定対象物の影領域を補償して測定対象物の3次元状態を算出する制御部と、を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、3次元形状測定装置に関し、特に、測定対象物の3次元形状の測定の際に格子イメージを分配し、分配された格子イメージをそれぞれ測定対象物の一方の側と他方の側とに交互に走査し、3次元形状の測定の際に発生する影領域を除去できる3次元形状測定装置に関する。
【背景技術】
【0002】
3次元形状測定装置に関する従来の技術は、米国特許US4、794、550号(出願日:1986年10月15日、出願人:Eastman Kodak Company)に記載されており、これを添付図面を用いて概略的に説明すると、次のようになる。
【0003】
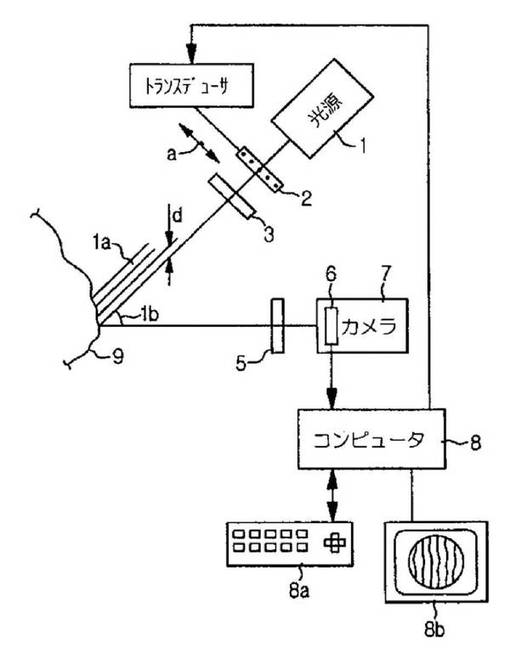
図1は、従来の3次元形状の測定装置の構成図である。図示のように、光源1から発する光が格子移動機構4により矢印「a」方向に移動される格子2とレンズ3とを介して測定対象物の表面9に格子イメージの周期「d」を有する水平光線1aが照射され、照射された光は角度1bで散乱され、レンズ5を介してイメージセンサ6を備えたカメラ7に入射され、サンプルイメージを取り込み、取り込まれたサンプルイメージは、コンピュータ8で処理し、測定対象物の表面3の3次元形状を算出して表示素子8bにより表示されるように構成される。ここで、キーボード8aは、モアレ縞を測定するための様々な情報を入力するために使用される。
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のモアレ縞を用いた3次元形状の測定の際に測定対象物の任意の位置に測定できない影領域が生じてしまい、測定対象物の3次元形状を精度よく測定できないという問題点があった。
【0005】
本発明は、上記問題点に鑑みなされたものであり、測定対象物の3次元形状の測定の際に格子イメージを分配し、測定対象物の一方の側と他方の側とにそれぞれ格子イメージをN回走査し、測定対象物により変形された格子イメージを取り込み、3次元形状を測定することにより、影領域を除去して3次元形状の測定精度をより改善できる3次元形状測定装置を提供することを目的とする。
【0006】
また、本発明は、投影部と3Dカメラとを一直線上に配置して3次元形状測定装置をコンパクトに構成できるようにすることを他の目的とする。
【課題を解決するための手段】
【0007】
本発明の一実施形態によると、測定対象物を固定するワークステージと、光源、前記光源から照射された光を透過させる格子及び前記格子の格子イメージを前記測定対象物に結像させる投影レンズを含み、前記測定対象物に対して格子イメージを第1方向にN回入射した後、前記測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、前記測定対象物によって反射される前記第1方向反射イメージ及び前記第2方向反射イメージを受信するイメージ取り込み装置と、前記イメージ取り込み装置に受信された前記第1方向反射イメージ及び前記第2方向反射イメージを用いて前記測定対象物の影領域を補償して前記測定対象物の3次元状態を算出する制御部と、を含む3次元測定装置が提供される。
前記制御部は、前記イメージ取り込み装置に受信された前記第1方向反射イメージ及び前記第2方向反射イメージを用いて前記測定対象物の影領域を補償して前記測定対象物の3次元状態を算出するようにしてもよい。
前記イメージ取り込み装置をX、Y及びZ軸方向に移動させるイメージ取り込み装置移動装置をさらに含むようにしてもよい。
前記ワークステージは、前記測定対象物を固定する第1ガイドと、前記第1ガイドを基準にして前記測定対象物の大きさによって移動するように設置される第2ガイドと、前記第1ガイドを基準にして前記第2ガイドを移動させるガイド移動装置と、を含むようにしてもよい。
前記投影部は、前記格子の移動を制御する格子移動装置をさらに含むようにしてもよい。
前記投影部は、前記格子移動装置によって前記格子が移動する時、前記測定対象物に前記格子イメージを照射するようにしてもよい。
前記投影部の格子は、液晶格子であってもよい。
前記格子移動装置は、PZTアクチュエータであってもよい。
前記NとN’は、同じ値であるようにしてもよい。
【0008】
本発明の一実施形態によると、測定対象物を固定するワークステージと、光源、前記光源から照射された光を透過させる格子及び前記格子の格子イメージを前記測定対象物に結像させる投影レンズを含み、前記測定対象物に対して格子イメージを第1方向にN回入射した後、前記測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、前記測定対象物によって反射する第1方向反射イメージ及び第2方向反射イメージを受信するイメージ取り込み装置と、前記イメージ取り込み装置に受信された前記第1方向反射イメージ及び前記第2方向反射イメージを用いて前記測定対象物の影領域を補償して前記測定対象物の3次元状態を算出する制御部と、を含み、前記制御部は基準面を用いて前記イメージ取り込み装置の焦点距離を設定することを特徴とする3次元測定装置が提供される。
前記制御部は、前記イメージ取り込み装置に受信された前記第1方向反射イメージ及び前記第2方向反射イメージを用いて前記測定対象物の影領域を補償して前記測定対象物の3次元状態を算出するようにしてもよい。
前記ワークステージは、前記測定対象物を固定する第1ガイドと、前記第1ガイドを基準にして前記測定対象物の大きさによって移動するように設置される第2ガイドと、前記第1ガイドを基準にして前記第2ガイドを移動させるガイド移動装置と、を含むようにしてもよい。
前記投影部は、前記格子の移動を制御する格子移動装置をさらに含むようにしてもよい。
前記投影部は、前記格子移動装置によって前記格子が移動する時、前記測定対象物に前記格子イメージを照射するようにしてもよい。
前記投影部の格子は、液晶格子であってもよい。
前記NとN’は、同じ値であるようにしてもよい。
前記基準面は、前記ワークステージによって支持されるようにしてもよい。
前記イメージ引出し部は、前記基準面に光を入射するための基準面光源をさらに含むようにしてもよい。
前記基準面光源は、レーザポインタであってもよい。
前記第1方向と前記第2方向は、互いに対称であるようにしてもよい。
また、本発明の一実施形態によると、測定対象物を固定するワークステージと、光源、前記光源から照射された光を測定対象物に対して第1方向に入射した後、前記光を前記測定対象物に第2方向に入射する光入射部と、前記測定対象物によって反射される第1方向反射光及び第2方向反射光を受信するカメラを含むイメージ取り込み装置と、前記イメージ取り込み装置に受信された前記第1方向反射光及び前記第2方向反射光を用いて前記測定対象物の影領域を補償して前記測定対象物の3次元状態を算出する制御部と、を含み、前記制御部は前記ワークステージに支持される基準面と前記イメージ引き出し部との距離を測定して前記測定対象部と前記イメージ引き出し部との距離を一定に維持することを特徴とする3次元測定装置が提供される。
前記制御部は、前記イメージ取り込み装置に受信された前記第1方向反射光及び前記第2方向反射光を用いて前記測定対象物の影領域を補償して前記測定対象物の3次元状態を算出するようにしてもよい。
前記光入射部は、前記測定対象物に対して前記第1方向にN回光を入射し、前記第2方向にN’回光を入射する(N及びN’は2以上の自然数)ようにしてもよい。
前記基準面に光を入射する発光装置をさらに含むようにしてもよい。
【発明の効果】
【0009】
本発明の3次元形状測定装置は、測定対象物の一方の側と他方の側とにそれぞれ格子イメージをN回ずつ走査し、測定対象物により変形された格子イメージを得ることにより、影領域と飽和領域とを一方の側と他方の側とでそれぞれ得られた位相値を用いて除去することにより、より精度よい3次元形状を測定することができ、投影部、分配器及び結像部を垂直方向に一直線上に配置することにより、イメージ取り込み装置をよりコンパクトに構成できるという効果を有する。
【図面の簡単な説明】
【0010】
【図1】従来の3次元形状測定装置の構成図である。
【図2】本発明の3次元形状測定装置の全体構成を示す斜視図である。
【図3】図2に示すイメージ取り込み装置の構成図である。
【図4】図2に示すイメージ取り込み装置の構成図である。
【図5】図3に示す分配器の拡大斜視図である。
【図6】図3に示す分配器の実施例を示す図である。
【図7】図3に示す分配器の実施例を示す図である。
【図8】図3に示す分配器の他の実施例を示す図である。
【図9】図3に示す分配器の他の実施例を示す図である。
【発明を実施するための形態】
【0011】
以下、本発明の好ましい実施の形態を、添付図面に基づいて詳しく説明する。
【0012】
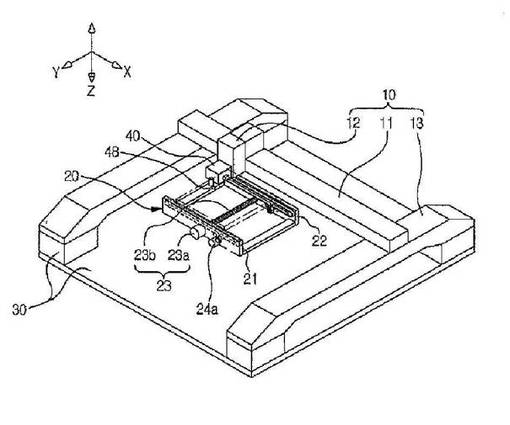
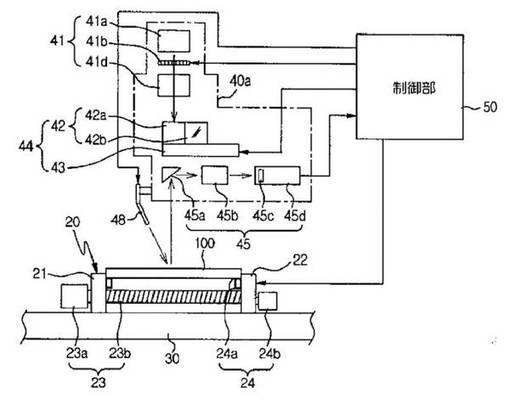
図2は、本発明の3次元形状測定装置の全体構成を示す斜視図である。図示のように、ベース部材30の上側にワークステージ20が設けられる。ワークステージ20の上側にはXYZ軸移動装置10が設けられる。X、Y及びZ軸方向に自由に移動され、測定対象物(100;図3参照)の3次元形状を測定するために、XYZ軸移動装置10にイメージ取り込み装置40が設けられる。そして、イメージ取り込み装置40と、ワークステージ20と、XYZ軸移動装置10とを全般的に制御するために、ベース部材30の一方の側に制御部(50;図3参照)が設けられる。
【0013】
XYZ軸移動装置10は、イメージ取り込み装置40をX、Y及びZ軸にそれぞれ移動させるためにリニアモータとボールスクリューとの何れかが適用される。測定対象物100を測定位置に移動させるワークステージ20は、図2から図4に示すように、第1のガイド21と、第2のガイド22と、ガイド移動装置23とから構成される。
【0014】
第1のガイド21はベース部材30に固定されるように設けられ、一方の側に所定の基準面が設定される。このような基準面は、イメージ取り込み装置40が光を受信できるように、第1のガイド21の上側の適切な任意の位置に設定されたり、ベース部材30の任意の位置に設定される。第2のガイド22は、第1のガイド21を基準として測定対象物100の大きさに応じて移動されるように設けられる。第2のガイド22を移動させるために、第1のガイド21と第2のガイド22とそれぞれ直交するようにガイド移動装置23が設けられる。ガイド移動装置23には、モータ23aを備えたボールスクリュー23bが適用され、第1のガイド21と第2のガイド22との内側には、測定対象物100を移動させるためのモータ24aとベルト24bとがそれぞれ設けられる。
【0015】
制御部50は、測定対象物100を測定するために、先ず、測定対象物100とイメージ取り込み装置40との間の焦点が正確であるかを点検する。このために、制御部50は、発光装置48によってワークステージ20の一方の側に設定された所定の基準面に対し、所定の波長を有する光を発生する。発光装置48は、イメージ取り込み装置40の一方の側に設けられている。すなわち、イメージ取り込み装置40をY軸方向から見ると、発光装置48は正面に見える。
【0016】
発光装置48は、所定の波長を有する光を発生するためにレーザポインタ(laser pointer)が使用される。測定対象物100を測定する前に、制御部50は発光装置48で発生
した光を基準面に入射させ、反射される光イメージをイメージ取り込み装置40を介して受信して、基準面とイメージ取り込み装置40との垂直距離を算出し、その結果によってXYZ軸移動装置10を制御することによってイメージ取り込み装置40のZ軸方向の距離を調整する。これにより、制御部50は測定対象物100とイメージ取り込み装置40との焦点距離を一定に保つ。
【0017】
測定対象物100とイメージ取り込み装置40との間の焦点距離が一定に保たれると、制御部50は、イメージ取り込み装置40を制御して測定対象物100の3次元形状を測定する。このために、先ず、制御部50は、XYZ軸移動装置10を制御してイメージ取り込み装置40をX軸、Y軸及びZ軸に移動させ、ワークステージ20に支持され固定された測定対象物100に移動させる。移動が終了すると、イメージ取り込み装置40は、測定対象物100の一方の側に格子イメージをN回走査して、測定対象物により変形された格子イメージをN回取り込み、交互に測定対象物の他方の側にN回走査して、測定対象物により変形された格子イメージをN回取り込む。
【0018】
イメージ取り込み装置40で測定対象物100の一方の側と他方の側とに交互にN回走査され取り込まれた変形された格子イメージを制御部50でそれぞれ受信して測定対象物100の3次元形状を算出する。ここで、制御部50は、イメージ取り込み装置40を制御して測定対象物100の一方の側と他方の側とにそれぞれN回ずつ交互に格子イメージを走査した後、それぞれに対する変形された格子イメージを受信し、測定対象物100の3次元形状を測定することにより、影領域を除去してより精度よい3次元形状を得る。
【0019】
測定対象物100の一方の側と他方の側とに交互にN回ずつ格子イメージを走査し、変形された格子イメージを取り込むイメージ取り込み装置40の構成を添付の図3及び図4を用いてより詳しく説明すると、次のようになる。
【0020】
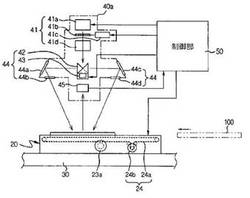
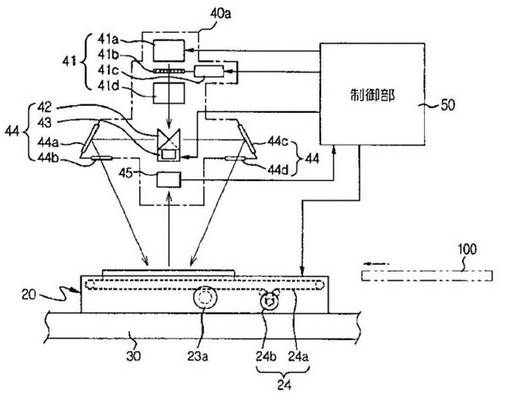
図3に示すイメージ取り込み装置40をY軸方向から正面に見るときのイメージ取り込み装置の構成図であり、図4に示すイメージ取り込み装置40をX軸方向から正面に見るときのイメージ取り込み装置の構成図である。図示のように、イメージ取り込み装置40は、投影部41、投影部41の垂直方向の下側に分配器(distributor)44が設けられ、
分配器44の垂直方向の下側に結像部45がそれぞれ設けられて、一点鎖線で示すイメージ取り込み装置のアウターケース40aのようにコンパクトに構成してもよい。
【0021】
投影部41は、光を発生する光源41aと、光源から発生した光を入射されるように光源41aの下側に設けられ、格子移動装置41cにより移動される回折格子41bを介して格子イメージを生成させ、回折格子41bの下側に設けられた投影光学系41dを介して透過させる。投影部41の投影光学系41dを介して透過される格子イメージは、分配器44に伝達される。ここで、回折格子41bは、液晶回折格子が適用できるし、格子移動装置41dは、PZTアクチュエータ(Piezoelectric Actuator)が適用できる。
【0022】
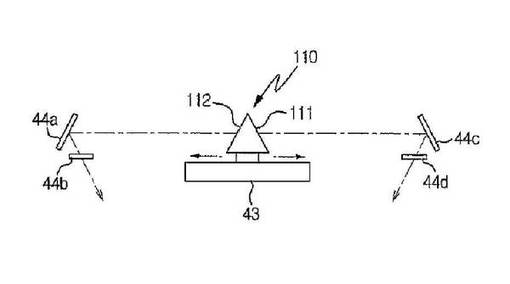
分配器44は、投影部41の投影光学系41dの下側に設けられる。分配器44は、格子イメージ分配ミラー42を介してミラー移動装置により伝達され、投影光学系41dから入射される格子イメージを分配する。格子イメージ分配ミラー42は、第1及び第2のミラー42a、42bを有している。分配器44は、第1及び第2のミラーの左右側にそれぞれ水平となるように設けられた第3のミラー44a及び第4のミラー44cにそれぞれ透過し、その後、第3のミラー44aと第4のミラー44cとのそれぞれの下側に設けられた第1のフィルタ44bと第2のフィルタ44dとにより格子イメージをフィルタリングする。そして分配器44は、測定対象物100の一方の側と他方の側とに交互にそれぞれN回ずつ格子イメージを走査する。
【0023】
測定対象物100に走査された格子イメージは、測定対象物100により変形された格子イメージを形成し、この変形された格子イメージを結像部45で受信する。結像部45は、分配器44の下部に設けられ、分配器44の第1のフィルタ44bと第2のフィルタ44dとを介して透過され、測定対象物100の一方の側と他方の側とにそれぞれN回走査され形成される変形された格子イメージを、それぞれ結像ミラー45aを介して水平方向に反射させ、結像レンズ45bと結像素子45cとを介してカメラ45dで取り込む。ここで、カメラ45dは、測定対象物100の変形された格子イメージをそれぞれ2×N個のフレームで取り込んで制御部50に転送する。
【0024】
制御部50は、転送されたそれぞれの変形された格子イメージを用いて測定対象物100の一方の側と他方の側とから得られた変形された格子イメージを用いて位相値を得ることにより、影領域と飽和領域とを得られた位相値を用いて除去して、より精度よい3次元形状を測定することが可能となる。
【0025】
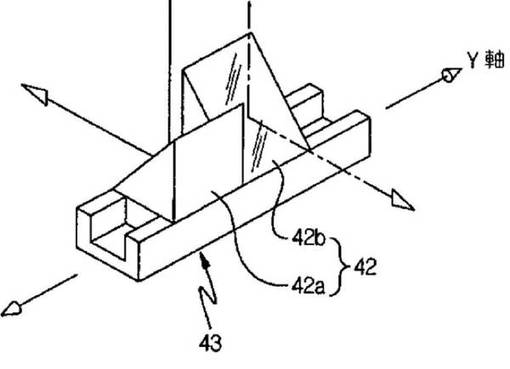
測定対象物100の精度よい3次元映像を得るために、格子イメージを分配する格子イメージ分配ミラー42においては、図5に示すように、第1のミラー42aと第2のミラー42bとのそれぞれ傾斜したミラー面の中心線が互いに交差するように接合して形成される。第1のミラー42aにより測定対象物100の一方の側にN回格子イメージを走査し、ミラー移動装置43によりY軸方向に移動され、第2のミラー42bにより測定対象物100の他方の側にN回の格子イメージを分配して走査する。
【0026】
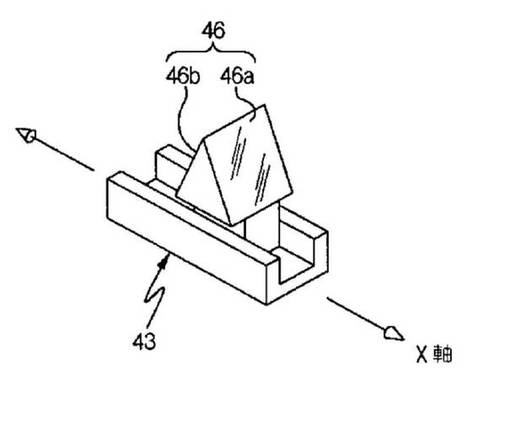
格子イメージ分配ミラー42の実施例では、図6及び図7に示すように、それぞれの傾斜面に第1のミラー46aと第2のミラー46bとが設けられた三角ミラー46を適用してもよいし、第1のミラー46aにより第3のミラー44a及び第1のフィルタ44bを介して格子イメージを測定対象物(100;図3参照)の一方の側にN回走査した後、ミラー移動装置43によりX軸方向に移動され、第2のミラー46bにより格子イメージを分配し、分配された格子イメージを第4のミラー44cと第2のフィルタ44dとを介して測定対象物100の他方の側にN回交互に走査する。
【0027】
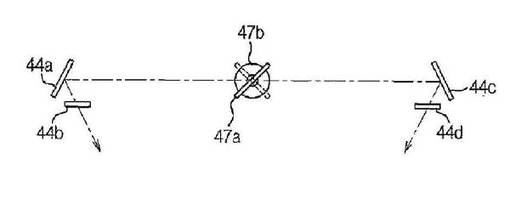
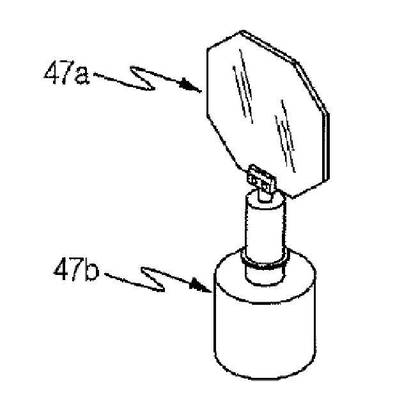
このような格子イメージ分配ミラー42のさらに他の実施例では、図8及び図9に示すように、回転ミラー47aを適用してもよいし、回転ミラー47aにより格子イメージを第3のミラー44aと第1のフィルタ44bとを介して測定対象物100の一方の側にN回走査し、その後、図8に示すように、ガルバノミラーメータ(Galvano mirror meter;
47b、図9参照)のような回転機構により所定の角度で回転され、格子イメージを第4
のミラー44cと第2のフィルタ44dとで分配し、測定対象物100の他方の側にN回走査する。ここで、格子イメージ分配ミラー42を移動させる直線運動機構であるミラー移動装置42aは、エアーシリンダー、リニアモータ、及びボールスクリューの何れかが適用され、回転ミラー47aを回転させるための回転機構としての回転装置47bは、ガルバノミラーメータが使用される。
【0028】
以上のように測定対象物の3次元形状の測定の際に測定対象物の一方の側と他方の側とにそれぞれ格子イメージをN回ずつ走査し、測定対象物により変形された格子イメージを得ることで影領域と飽和領域とを一方の側と他方の側とでそれぞれ得られた位相値を用いて除去することにより、より精度よい3次元形状を測定することが可能となる。
【産業上の利用可能性】
【0029】
本発明による3次元形状測定装置は、印刷回路基板のはんだ部分に対する良好または不良を判別する際に、はんだ部分を3次元で測定し、測定された結果によってはんだ部分の良好または不良を判別する産業分野に適用できるという技術的効果がある。
【技術分野】
【0001】
本発明は、3次元形状測定装置に関し、特に、測定対象物の3次元形状の測定の際に格子イメージを分配し、分配された格子イメージをそれぞれ測定対象物の一方の側と他方の側とに交互に走査し、3次元形状の測定の際に発生する影領域を除去できる3次元形状測定装置に関する。
【背景技術】
【0002】
3次元形状測定装置に関する従来の技術は、米国特許US4、794、550号(出願日:1986年10月15日、出願人:Eastman Kodak Company)に記載されており、これを添付図面を用いて概略的に説明すると、次のようになる。
【0003】
図1は、従来の3次元形状の測定装置の構成図である。図示のように、光源1から発する光が格子移動機構4により矢印「a」方向に移動される格子2とレンズ3とを介して測定対象物の表面9に格子イメージの周期「d」を有する水平光線1aが照射され、照射された光は角度1bで散乱され、レンズ5を介してイメージセンサ6を備えたカメラ7に入射され、サンプルイメージを取り込み、取り込まれたサンプルイメージは、コンピュータ8で処理し、測定対象物の表面3の3次元形状を算出して表示素子8bにより表示されるように構成される。ここで、キーボード8aは、モアレ縞を測定するための様々な情報を入力するために使用される。
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のモアレ縞を用いた3次元形状の測定の際に測定対象物の任意の位置に測定できない影領域が生じてしまい、測定対象物の3次元形状を精度よく測定できないという問題点があった。
【0005】
本発明は、上記問題点に鑑みなされたものであり、測定対象物の3次元形状の測定の際に格子イメージを分配し、測定対象物の一方の側と他方の側とにそれぞれ格子イメージをN回走査し、測定対象物により変形された格子イメージを取り込み、3次元形状を測定することにより、影領域を除去して3次元形状の測定精度をより改善できる3次元形状測定装置を提供することを目的とする。
【0006】
また、本発明は、投影部と3Dカメラとを一直線上に配置して3次元形状測定装置をコンパクトに構成できるようにすることを他の目的とする。
【課題を解決するための手段】
【0007】
本発明の一実施形態によると、測定対象物を固定するワークステージと、光源、前記光源から照射された光を透過させる格子及び前記格子の格子イメージを前記測定対象物に結像させる投影レンズを含み、前記測定対象物に対して格子イメージを第1方向にN回入射した後、前記測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、前記測定対象物によって反射される前記第1方向反射イメージ及び前記第2方向反射イメージを受信するイメージ取り込み装置と、前記イメージ取り込み装置に受信された前記第1方向反射イメージ及び前記第2方向反射イメージを用いて前記測定対象物の影領域を補償して前記測定対象物の3次元状態を算出する制御部と、を含む3次元測定装置が提供される。
前記制御部は、前記イメージ取り込み装置に受信された前記第1方向反射イメージ及び前記第2方向反射イメージを用いて前記測定対象物の影領域を補償して前記測定対象物の3次元状態を算出するようにしてもよい。
前記イメージ取り込み装置をX、Y及びZ軸方向に移動させるイメージ取り込み装置移動装置をさらに含むようにしてもよい。
前記ワークステージは、前記測定対象物を固定する第1ガイドと、前記第1ガイドを基準にして前記測定対象物の大きさによって移動するように設置される第2ガイドと、前記第1ガイドを基準にして前記第2ガイドを移動させるガイド移動装置と、を含むようにしてもよい。
前記投影部は、前記格子の移動を制御する格子移動装置をさらに含むようにしてもよい。
前記投影部は、前記格子移動装置によって前記格子が移動する時、前記測定対象物に前記格子イメージを照射するようにしてもよい。
前記投影部の格子は、液晶格子であってもよい。
前記格子移動装置は、PZTアクチュエータであってもよい。
前記NとN’は、同じ値であるようにしてもよい。
【0008】
本発明の一実施形態によると、測定対象物を固定するワークステージと、光源、前記光源から照射された光を透過させる格子及び前記格子の格子イメージを前記測定対象物に結像させる投影レンズを含み、前記測定対象物に対して格子イメージを第1方向にN回入射した後、前記測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、前記測定対象物によって反射する第1方向反射イメージ及び第2方向反射イメージを受信するイメージ取り込み装置と、前記イメージ取り込み装置に受信された前記第1方向反射イメージ及び前記第2方向反射イメージを用いて前記測定対象物の影領域を補償して前記測定対象物の3次元状態を算出する制御部と、を含み、前記制御部は基準面を用いて前記イメージ取り込み装置の焦点距離を設定することを特徴とする3次元測定装置が提供される。
前記制御部は、前記イメージ取り込み装置に受信された前記第1方向反射イメージ及び前記第2方向反射イメージを用いて前記測定対象物の影領域を補償して前記測定対象物の3次元状態を算出するようにしてもよい。
前記ワークステージは、前記測定対象物を固定する第1ガイドと、前記第1ガイドを基準にして前記測定対象物の大きさによって移動するように設置される第2ガイドと、前記第1ガイドを基準にして前記第2ガイドを移動させるガイド移動装置と、を含むようにしてもよい。
前記投影部は、前記格子の移動を制御する格子移動装置をさらに含むようにしてもよい。
前記投影部は、前記格子移動装置によって前記格子が移動する時、前記測定対象物に前記格子イメージを照射するようにしてもよい。
前記投影部の格子は、液晶格子であってもよい。
前記NとN’は、同じ値であるようにしてもよい。
前記基準面は、前記ワークステージによって支持されるようにしてもよい。
前記イメージ引出し部は、前記基準面に光を入射するための基準面光源をさらに含むようにしてもよい。
前記基準面光源は、レーザポインタであってもよい。
前記第1方向と前記第2方向は、互いに対称であるようにしてもよい。
また、本発明の一実施形態によると、測定対象物を固定するワークステージと、光源、前記光源から照射された光を測定対象物に対して第1方向に入射した後、前記光を前記測定対象物に第2方向に入射する光入射部と、前記測定対象物によって反射される第1方向反射光及び第2方向反射光を受信するカメラを含むイメージ取り込み装置と、前記イメージ取り込み装置に受信された前記第1方向反射光及び前記第2方向反射光を用いて前記測定対象物の影領域を補償して前記測定対象物の3次元状態を算出する制御部と、を含み、前記制御部は前記ワークステージに支持される基準面と前記イメージ引き出し部との距離を測定して前記測定対象部と前記イメージ引き出し部との距離を一定に維持することを特徴とする3次元測定装置が提供される。
前記制御部は、前記イメージ取り込み装置に受信された前記第1方向反射光及び前記第2方向反射光を用いて前記測定対象物の影領域を補償して前記測定対象物の3次元状態を算出するようにしてもよい。
前記光入射部は、前記測定対象物に対して前記第1方向にN回光を入射し、前記第2方向にN’回光を入射する(N及びN’は2以上の自然数)ようにしてもよい。
前記基準面に光を入射する発光装置をさらに含むようにしてもよい。
【発明の効果】
【0009】
本発明の3次元形状測定装置は、測定対象物の一方の側と他方の側とにそれぞれ格子イメージをN回ずつ走査し、測定対象物により変形された格子イメージを得ることにより、影領域と飽和領域とを一方の側と他方の側とでそれぞれ得られた位相値を用いて除去することにより、より精度よい3次元形状を測定することができ、投影部、分配器及び結像部を垂直方向に一直線上に配置することにより、イメージ取り込み装置をよりコンパクトに構成できるという効果を有する。
【図面の簡単な説明】
【0010】
【図1】従来の3次元形状測定装置の構成図である。
【図2】本発明の3次元形状測定装置の全体構成を示す斜視図である。
【図3】図2に示すイメージ取り込み装置の構成図である。
【図4】図2に示すイメージ取り込み装置の構成図である。
【図5】図3に示す分配器の拡大斜視図である。
【図6】図3に示す分配器の実施例を示す図である。
【図7】図3に示す分配器の実施例を示す図である。
【図8】図3に示す分配器の他の実施例を示す図である。
【図9】図3に示す分配器の他の実施例を示す図である。
【発明を実施するための形態】
【0011】
以下、本発明の好ましい実施の形態を、添付図面に基づいて詳しく説明する。
【0012】
図2は、本発明の3次元形状測定装置の全体構成を示す斜視図である。図示のように、ベース部材30の上側にワークステージ20が設けられる。ワークステージ20の上側にはXYZ軸移動装置10が設けられる。X、Y及びZ軸方向に自由に移動され、測定対象物(100;図3参照)の3次元形状を測定するために、XYZ軸移動装置10にイメージ取り込み装置40が設けられる。そして、イメージ取り込み装置40と、ワークステージ20と、XYZ軸移動装置10とを全般的に制御するために、ベース部材30の一方の側に制御部(50;図3参照)が設けられる。
【0013】
XYZ軸移動装置10は、イメージ取り込み装置40をX、Y及びZ軸にそれぞれ移動させるためにリニアモータとボールスクリューとの何れかが適用される。測定対象物100を測定位置に移動させるワークステージ20は、図2から図4に示すように、第1のガイド21と、第2のガイド22と、ガイド移動装置23とから構成される。
【0014】
第1のガイド21はベース部材30に固定されるように設けられ、一方の側に所定の基準面が設定される。このような基準面は、イメージ取り込み装置40が光を受信できるように、第1のガイド21の上側の適切な任意の位置に設定されたり、ベース部材30の任意の位置に設定される。第2のガイド22は、第1のガイド21を基準として測定対象物100の大きさに応じて移動されるように設けられる。第2のガイド22を移動させるために、第1のガイド21と第2のガイド22とそれぞれ直交するようにガイド移動装置23が設けられる。ガイド移動装置23には、モータ23aを備えたボールスクリュー23bが適用され、第1のガイド21と第2のガイド22との内側には、測定対象物100を移動させるためのモータ24aとベルト24bとがそれぞれ設けられる。
【0015】
制御部50は、測定対象物100を測定するために、先ず、測定対象物100とイメージ取り込み装置40との間の焦点が正確であるかを点検する。このために、制御部50は、発光装置48によってワークステージ20の一方の側に設定された所定の基準面に対し、所定の波長を有する光を発生する。発光装置48は、イメージ取り込み装置40の一方の側に設けられている。すなわち、イメージ取り込み装置40をY軸方向から見ると、発光装置48は正面に見える。
【0016】
発光装置48は、所定の波長を有する光を発生するためにレーザポインタ(laser pointer)が使用される。測定対象物100を測定する前に、制御部50は発光装置48で発生
した光を基準面に入射させ、反射される光イメージをイメージ取り込み装置40を介して受信して、基準面とイメージ取り込み装置40との垂直距離を算出し、その結果によってXYZ軸移動装置10を制御することによってイメージ取り込み装置40のZ軸方向の距離を調整する。これにより、制御部50は測定対象物100とイメージ取り込み装置40との焦点距離を一定に保つ。
【0017】
測定対象物100とイメージ取り込み装置40との間の焦点距離が一定に保たれると、制御部50は、イメージ取り込み装置40を制御して測定対象物100の3次元形状を測定する。このために、先ず、制御部50は、XYZ軸移動装置10を制御してイメージ取り込み装置40をX軸、Y軸及びZ軸に移動させ、ワークステージ20に支持され固定された測定対象物100に移動させる。移動が終了すると、イメージ取り込み装置40は、測定対象物100の一方の側に格子イメージをN回走査して、測定対象物により変形された格子イメージをN回取り込み、交互に測定対象物の他方の側にN回走査して、測定対象物により変形された格子イメージをN回取り込む。
【0018】
イメージ取り込み装置40で測定対象物100の一方の側と他方の側とに交互にN回走査され取り込まれた変形された格子イメージを制御部50でそれぞれ受信して測定対象物100の3次元形状を算出する。ここで、制御部50は、イメージ取り込み装置40を制御して測定対象物100の一方の側と他方の側とにそれぞれN回ずつ交互に格子イメージを走査した後、それぞれに対する変形された格子イメージを受信し、測定対象物100の3次元形状を測定することにより、影領域を除去してより精度よい3次元形状を得る。
【0019】
測定対象物100の一方の側と他方の側とに交互にN回ずつ格子イメージを走査し、変形された格子イメージを取り込むイメージ取り込み装置40の構成を添付の図3及び図4を用いてより詳しく説明すると、次のようになる。
【0020】
図3に示すイメージ取り込み装置40をY軸方向から正面に見るときのイメージ取り込み装置の構成図であり、図4に示すイメージ取り込み装置40をX軸方向から正面に見るときのイメージ取り込み装置の構成図である。図示のように、イメージ取り込み装置40は、投影部41、投影部41の垂直方向の下側に分配器(distributor)44が設けられ、
分配器44の垂直方向の下側に結像部45がそれぞれ設けられて、一点鎖線で示すイメージ取り込み装置のアウターケース40aのようにコンパクトに構成してもよい。
【0021】
投影部41は、光を発生する光源41aと、光源から発生した光を入射されるように光源41aの下側に設けられ、格子移動装置41cにより移動される回折格子41bを介して格子イメージを生成させ、回折格子41bの下側に設けられた投影光学系41dを介して透過させる。投影部41の投影光学系41dを介して透過される格子イメージは、分配器44に伝達される。ここで、回折格子41bは、液晶回折格子が適用できるし、格子移動装置41dは、PZTアクチュエータ(Piezoelectric Actuator)が適用できる。
【0022】
分配器44は、投影部41の投影光学系41dの下側に設けられる。分配器44は、格子イメージ分配ミラー42を介してミラー移動装置により伝達され、投影光学系41dから入射される格子イメージを分配する。格子イメージ分配ミラー42は、第1及び第2のミラー42a、42bを有している。分配器44は、第1及び第2のミラーの左右側にそれぞれ水平となるように設けられた第3のミラー44a及び第4のミラー44cにそれぞれ透過し、その後、第3のミラー44aと第4のミラー44cとのそれぞれの下側に設けられた第1のフィルタ44bと第2のフィルタ44dとにより格子イメージをフィルタリングする。そして分配器44は、測定対象物100の一方の側と他方の側とに交互にそれぞれN回ずつ格子イメージを走査する。
【0023】
測定対象物100に走査された格子イメージは、測定対象物100により変形された格子イメージを形成し、この変形された格子イメージを結像部45で受信する。結像部45は、分配器44の下部に設けられ、分配器44の第1のフィルタ44bと第2のフィルタ44dとを介して透過され、測定対象物100の一方の側と他方の側とにそれぞれN回走査され形成される変形された格子イメージを、それぞれ結像ミラー45aを介して水平方向に反射させ、結像レンズ45bと結像素子45cとを介してカメラ45dで取り込む。ここで、カメラ45dは、測定対象物100の変形された格子イメージをそれぞれ2×N個のフレームで取り込んで制御部50に転送する。
【0024】
制御部50は、転送されたそれぞれの変形された格子イメージを用いて測定対象物100の一方の側と他方の側とから得られた変形された格子イメージを用いて位相値を得ることにより、影領域と飽和領域とを得られた位相値を用いて除去して、より精度よい3次元形状を測定することが可能となる。
【0025】
測定対象物100の精度よい3次元映像を得るために、格子イメージを分配する格子イメージ分配ミラー42においては、図5に示すように、第1のミラー42aと第2のミラー42bとのそれぞれ傾斜したミラー面の中心線が互いに交差するように接合して形成される。第1のミラー42aにより測定対象物100の一方の側にN回格子イメージを走査し、ミラー移動装置43によりY軸方向に移動され、第2のミラー42bにより測定対象物100の他方の側にN回の格子イメージを分配して走査する。
【0026】
格子イメージ分配ミラー42の実施例では、図6及び図7に示すように、それぞれの傾斜面に第1のミラー46aと第2のミラー46bとが設けられた三角ミラー46を適用してもよいし、第1のミラー46aにより第3のミラー44a及び第1のフィルタ44bを介して格子イメージを測定対象物(100;図3参照)の一方の側にN回走査した後、ミラー移動装置43によりX軸方向に移動され、第2のミラー46bにより格子イメージを分配し、分配された格子イメージを第4のミラー44cと第2のフィルタ44dとを介して測定対象物100の他方の側にN回交互に走査する。
【0027】
このような格子イメージ分配ミラー42のさらに他の実施例では、図8及び図9に示すように、回転ミラー47aを適用してもよいし、回転ミラー47aにより格子イメージを第3のミラー44aと第1のフィルタ44bとを介して測定対象物100の一方の側にN回走査し、その後、図8に示すように、ガルバノミラーメータ(Galvano mirror meter;
47b、図9参照)のような回転機構により所定の角度で回転され、格子イメージを第4
のミラー44cと第2のフィルタ44dとで分配し、測定対象物100の他方の側にN回走査する。ここで、格子イメージ分配ミラー42を移動させる直線運動機構であるミラー移動装置42aは、エアーシリンダー、リニアモータ、及びボールスクリューの何れかが適用され、回転ミラー47aを回転させるための回転機構としての回転装置47bは、ガルバノミラーメータが使用される。
【0028】
以上のように測定対象物の3次元形状の測定の際に測定対象物の一方の側と他方の側とにそれぞれ格子イメージをN回ずつ走査し、測定対象物により変形された格子イメージを得ることで影領域と飽和領域とを一方の側と他方の側とでそれぞれ得られた位相値を用いて除去することにより、より精度よい3次元形状を測定することが可能となる。
【産業上の利用可能性】
【0029】
本発明による3次元形状測定装置は、印刷回路基板のはんだ部分に対する良好または不良を判別する際に、はんだ部分を3次元で測定し、測定された結果によってはんだ部分の良好または不良を判別する産業分野に適用できるという技術的効果がある。
【特許請求の範囲】
【請求項1】
測定対象物を固定するワークステージと、
光源、前記光源から照射された光を透過させる格子及び前記格子の格子イメージを前記測定対象物に結像させる投影レンズを含み、前記測定対象物に対して格子イメージを第1方向にN回入射した後、前記測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、
結像レンズ及びカメラを含み、前記測定対象物によって反射される前記第1方向反射イメージ及び前記第2方向反射イメージを受信するイメージ取り込み装置と、
前記イメージ取り込み装置に受信された前記第1方向反射イメージ及び前記第2方向反射イメージを用いて前記測定対象物の影領域を補償して前記測定対象物の3次元状態を算出する制御部と、
を含む3次元測定装置。
【請求項1】
測定対象物を固定するワークステージと、
光源、前記光源から照射された光を透過させる格子及び前記格子の格子イメージを前記測定対象物に結像させる投影レンズを含み、前記測定対象物に対して格子イメージを第1方向にN回入射した後、前記測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、
結像レンズ及びカメラを含み、前記測定対象物によって反射される前記第1方向反射イメージ及び前記第2方向反射イメージを受信するイメージ取り込み装置と、
前記イメージ取り込み装置に受信された前記第1方向反射イメージ及び前記第2方向反射イメージを用いて前記測定対象物の影領域を補償して前記測定対象物の3次元状態を算出する制御部と、
を含む3次元測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−108992(P2013−108992A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2013−22679(P2013−22679)
【出願日】平成25年2月7日(2013.2.7)
【分割の表示】特願2008−302344(P2008−302344)の分割
【原出願日】平成16年2月5日(2004.2.5)
【出願人】(506414749)コー・ヤング・テクノロジー・インコーポレーテッド (37)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成25年2月7日(2013.2.7)
【分割の表示】特願2008−302344(P2008−302344)の分割
【原出願日】平成16年2月5日(2004.2.5)
【出願人】(506414749)コー・ヤング・テクノロジー・インコーポレーテッド (37)
【Fターム(参考)】
[ Back to top ]