
3次元構造解析条件データ生成装置および3次元構造解析条件データ生成方法
【課題】
2次元軸対称モデルの要素形状と3次元解析モデルの任意断面内部の要素形状や座標系が異なる場合でも、2次元軸対称モデルの解析結果から、3次元構造解析モデルの解析条件データを自動生成する。
【解決手段】
3次元構造解析条件データ自動マッピング装置は、3次元モデル節点座標変換部と、2次元軸対称解析モデルの節点の解析結果を3次元構造解析モデルの節点の解析条件データとして求める、同一節点座標判定部と、同一点として判定されなかった3次元構造解析モデルの節点の解析条件データを求めるため、2次元モデル要素分割部と、節点座標が3角形内部にあるかどうかを判定する点座標の3角形内外判定部と、3角形内部の節点座標と3角形の頂点座標と3角形の頂点に対応する2次元軸対称解析結果から3角形内部の節点座標に対応する節点値を補間して求める、3次元モデル節点値補間部と、解析条件データ設定部を有する。
2次元軸対称モデルの要素形状と3次元解析モデルの任意断面内部の要素形状や座標系が異なる場合でも、2次元軸対称モデルの解析結果から、3次元構造解析モデルの解析条件データを自動生成する。
【解決手段】
3次元構造解析条件データ自動マッピング装置は、3次元モデル節点座標変換部と、2次元軸対称解析モデルの節点の解析結果を3次元構造解析モデルの節点の解析条件データとして求める、同一節点座標判定部と、同一点として判定されなかった3次元構造解析モデルの節点の解析条件データを求めるため、2次元モデル要素分割部と、節点座標が3角形内部にあるかどうかを判定する点座標の3角形内外判定部と、3角形内部の節点座標と3角形の頂点座標と3角形の頂点に対応する2次元軸対称解析結果から3角形内部の節点座標に対応する節点値を補間して求める、3次元モデル節点値補間部と、解析条件データ設定部を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、3次元構造解析条件データ生成技術に係わり、特に2次元軸対称モデルの解析結果から、その2次元軸対称モデル形状を軸回りに回転して得られる3次元形状と相似とみなせる3次元構造解析モデルの解析条件データを自動生成する装置および方法に関する。
【背景技術】
【0002】
現在製品設計において3次元CAE(computer−aided engineering)ソフトウェアを用いた構造解析による設計が一般的になってきており、例えば圧力容器などの対称構造体の熱的健全性を評価する場合、まず2次元軸対称モデルで温度伝導解析を行い節点温度を求め、その求めた温度を用いて熱応力解析を実施して応力などの発生状態を把握し、次に3次元モデルを用いた詳細な解析・評価を行う方法が一例としてあげられる。この場合3次元モデルによる解析を実施するには2次元軸対称モデルで求めた節点温度などの条件を、3次元解析モデルに反映させ詳細解析を実施し解を求め、最終的な製品の構造上の健全性を評価する手順となる。しかしながら2次元軸対称解析の結果を3次元構造解析モデルの解析条件に設定するためには、3次元構造解析モデルの各節点に対し2次元軸対称解析の結果を当てはめる必要があり、従来は人間が3次元構造解析モデルの節点座標と2次元軸対称モデルの節点座標との関係を判断し、手動で3次元構造解析条件の節点値として入力していたため、多大な工数を必要とし、また転記ミスなどの理由で解析結果の信頼性確保にも問題を起こす要因となっていた。
【0003】
そこで2次元軸対称モデルの解析結果を、自動的に3次元構造解析モデルの条件データとして反映できることが望まれていた。2次元軸対称モデルの解析結果を、自動的に3次元構造解析モデルの条件データとして反映する技術としては、一例として特許文献1に示されているが、2次元軸対称モデルの要素形状と3次元構造解析モデルの任意の断面の要素形状が同一であることが前程であり、任意断面内部の要素形状や座標系が異なる場合の2次元軸対称モデルの解析結果を、自動的に3次元構造解析モデルの条件データとして反映する技術は見あたらない。
【0004】
【特許文献1】特開平5−288635号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明の目的は、2次元軸対称モデルの要素形状と3次元構造解析モデルの任意断面内部の要素形状や座標系が異なる場合でも、2次元軸対称モデルの解析結果から、3次元構造解析モデルの解析条件データを自動生成する装置および方法を提供することにある。
【課題を解決するための手段】
【0006】
表示装置,入力装置,記憶装置,作業用データメモリ及び演算処理装置からなる3次元構造解析条件データ生成装置において、前記演算処理装置は2次元軸対称解析結果から、3次元構造解析モデルの解析条件データを自動生成する3次元構造解析条件データ自動マッピング装置を有し、3次元構造解析条件データ自動マッピング装置は、2次元軸対称解析結果読み込み部と、3次元構造解析モデルデータ読み込み部と、3次元構造解析条件データ処理部と、3次元構造解析モデルの節点座標を2次元軸対称解析座標系へ座標変換する、3次元モデル節点座標変換部と、変換した座標と2次元軸対称解析モデルの節点座標との距離を判定し同一点と判定された場合、2次元軸対称解析モデルの節点の解析結果を3次元構造解析モデルの節点の解析条件データとして求める、同一節点座標判定部と、同一点として判定されなかった3次元構造解析モデルの節点の解析条件データを求めるため、2次元モデル要素分割部と、点座標が3角形内部にあるかどうかを判定する点座標の3角形内外判定部と、3角形内部の点座標と3角形の頂点座標と3角形の頂点に対応する2次元軸対称解析結果から3角形内部の点座標に対応する節点値を補間して求める、3次元モデル節点値補間部と、解析条件データ設定部を有することを特徴とした3次元構造解析条件データ生成装置および方法にある。
【発明の効果】
【0007】
本発明の3次元構造解析条件データ生成装置は、2次元軸対称モデルの要素形状と3次元構造解析モデルの任意断面内部の要素形状や座標系が異なる場合でも、2次元軸対称モデルの解析結果から、3次元構造解析モデルの解析条件データを自動生成することにより、従来は人間が3次元構造解析モデルの節点座標と2次元軸対称モデルの節点座標との関係を判断し、手動で3次元構造解析条件の節点値として入力していた多大な工数を削減することが可能になり、また転記ミスなどをなくすことで解析結果の信頼性を確保することが可能になる。
【発明を実施するための最良の形態】
【0008】
上述の3次元構造解析条件データ生成方法は、3次元構造解析データ生成装置を使用して、2次元軸対称解析モデルの要素形状を2つの3角形に分割し、節点座標が3角形内部にあるかどうかを判定し、3角形内部の節点座標と3角形の頂点座標と3角形の頂点に対応する2次元軸対称解析結果から3角形内部の節点座標に対応する節点値を補間して求めて、3次元構造モデルの節点についての解析データを求めることを特徴とする。
【実施例1】
【0009】
以下、本発明の実施の形態を、図を用いて説明する。
【0010】
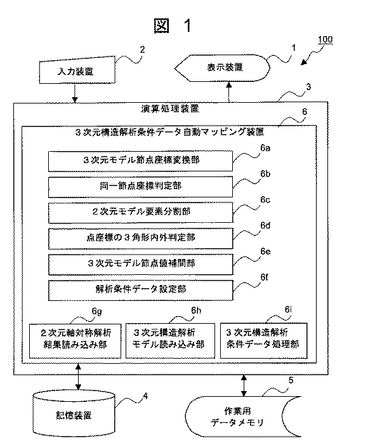
図1は、本発明による3次元構造解析条件データ生成装置の構成の一実施例を示したものである。
【0011】
本発明の3次元構造解析条件データ生成装置は、表示装置1,入力装置2,記憶装置4,作業用データメモリ5及び演算処理装置3からなる3次元構造解析条件データ生成装置において、前記演算処理装置3は2次元軸対称解析結果から、3次元構造解析モデルの解析条件データを自動生成する3次元構造解析条件データ自動マッピング装置6を有し、前記3次元構造解析条件データ自動マッピング装置6は、2次元軸対称解析結果データを入力装置2から指示し記憶装置4から作業用メモリ5に読み込む、2次元軸対称解析結果読み込み部6gと、3次元構造解析モデルデータを入力装置2から指示し記憶装置4から作業用データメモリ5に読み込む、3次元構造解析モデルデータ読み込み部6hと、3次元構造解析条件データ自動マッピング装置6で自動生成した3次元構造解析条件データを記憶装置4または表示装置1に出力する、3次元構造解析条件データ処理部6iと、前記3次元構造解析モデルデータ読み込み部6hで読み込んだ3次元構造解析モデルの節点座標を、2次元軸対称解析座標系へ座標変換する、3次元モデル節点座標変換部6aと、前記3次元モデル節点座標変換部6aで変換した座標と2次元軸対称解析モデルの節点座標との距離を判定し同一点と判定した場合、2次元軸対称解析モデルの節点の解析結果を3次元構造解析モデルの節点の解析条件データとして求める、同一節点座標判定部6bと、前記同一節点座標判定部6bでは、同一点として判定されなかった3次元構造解析モデルの節点の解析条件データを求めるため、2次元軸対称解析モデルの要素形状を2つの3角形に分割する2次元モデル要素分割部6cと、節点座標が3角形内部にあるかどうかを判定する節点座標の3角形内外判定部6dと、3角形内部の節点座標と3角形の頂点座標と3角形の頂点に対応する2次元軸対称解析結果から3角形内部の節点座標に対応する節点値を補間して求める、3次元モデル節点値補間部6eと、前記同一節点座標判定部6bまたは、3次元構造解析モデル節点値補間部6eで求めた、3次元構造解析モデルの各節点の解析条件データを設定する解析条件データ設定部6fを有する。
【0012】
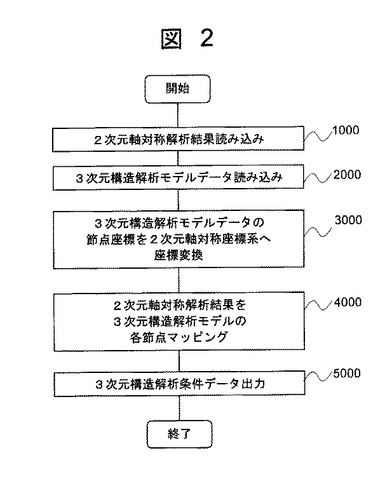
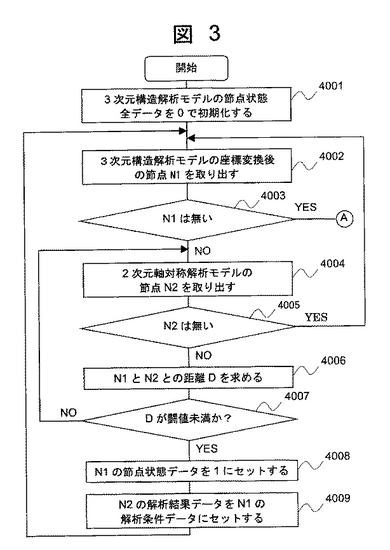
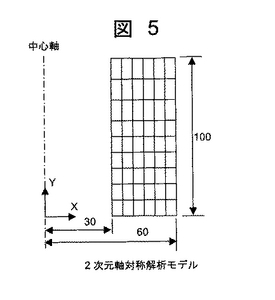
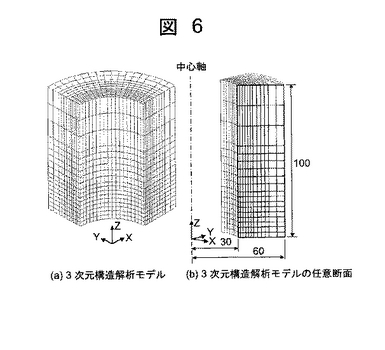
図2は、本発明による3次元構造解析条件データ自動マッピング装置6における処理フローの一実施例を示したものであり、図3、及び図4は図2におけるステップ4000の詳細フローの一実施例を示したものである。図5は本実施例による2次元軸対称解析モデルの好適な一実施例を示す。図5に示すように2次元軸対称解析モデルは、Y軸を中心軸としてXY平面上に形状を定義した例である。図6は本実施例による3次元構造解析モデルの好適な一実施例を示す(図6(a))。図6に示すように3次元構造解析モデルはZ軸を中心軸としてXZ平面状に定義した要素形状を90度回転して得られる形状を定義した例である。図6の(b)に示すように3次元構造解析モデルの任意断面が2次元軸対称解析モデルと座標系及び断面の内部の要素形状が異なっている場合の一実施例である。
【0013】
次に本実施例による3次元構造解析条件データ自動マッピング装置の処理手順の一実施例を図2,図3,図4を用いて説明する。
【0014】
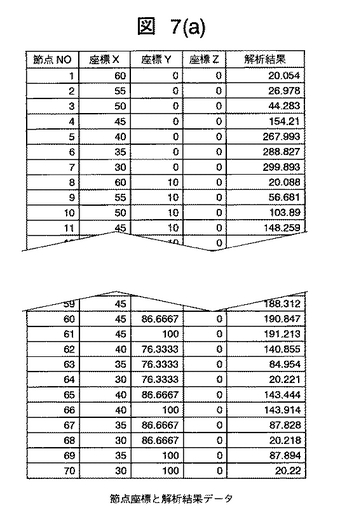
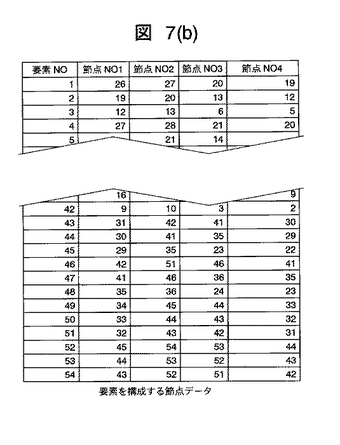
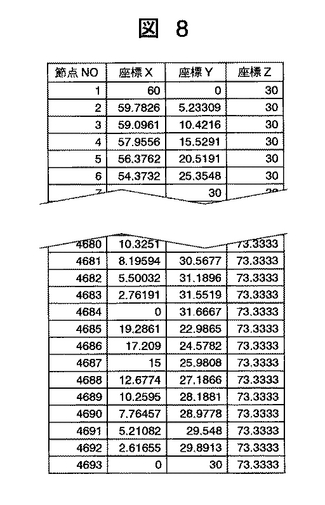
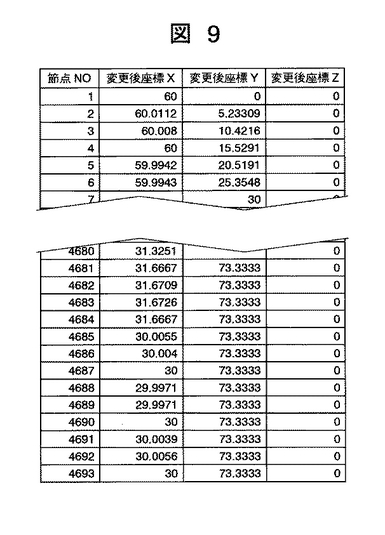
まずステップ1000で、2次元軸対称解析結果読み込み部6gにおいて、入力装置2から指示した2次元軸対称解析結果データを記憶装置4から作業用データメモリ5に読み込む。2次元軸対称解析結果は、2次元軸対称モデルの節点座標データと、解析結果の節点値と、2次元要素の構成節点番号とからなる。図7に図5に示す2次元軸対称解析モデルの2次元軸対称解析結果データの一実施例を示す。図7(a)は節点座標と解析結果を示し、図7(b)は要素を構成する節点データを示す。次にステップ2000で、3次元構造解析モデルデータ読込み部6hにおいて、入力装置2から支持した3次元構造解析モデルデータを記憶装置4から作業用データメモリ5読み込む。3次元構造解析モデルデータは3次元構造解析モデルの節点座標であり、図8に3次元構造解析モデルデータの一実施例を示す。次にステップ3000で、3次元構造解析条件データ自動マッピング装置6の3次元モデル節点座標変換部6aにおいて、ステップ2000で読み込んだ3次元構造解析モデルデータの節点座標を、2次元軸対称解析座標系に座標変換する。図5に示す2次元軸対称解析モデルと図6に示す3次元構造解析モデルの場合、3次元構造解析モデルのX−Y平面上の節点座標と原点との距離を、2次元軸対称解析座標系におけるX座標とし、3次元構造解析モデルのZ座標を2次元軸対称解析座標系におけるY座標とすることができる。図9に3次元構造解析モデルの節点座標を2次元軸対称解析座標系に座標変換した実施例を示す。
【0015】
次に、ステップ4000で、3次元構造解析条件データ自動マッピング装置6の同一節点座標判定部6bと2次元モデル要素分割部6cと節点座標の3角形内外判定部6dと3次元構造解析モデル節点値補間部6eと解析条件データ設定部6fで、2次元軸対称解析結果を3次元構造解析モデルの各節点値にマッピングする。ステップ4000の詳細な処理内容を図3,図4を用いて説明する。
【0016】
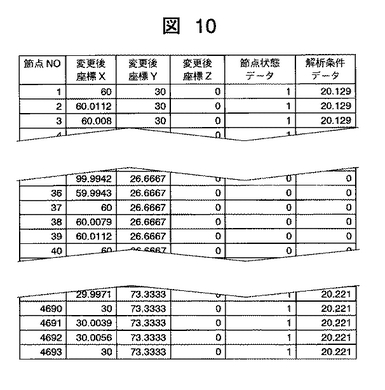
作業用データメモリ5には、図10に示すように、3次元モデル節点座標変換部6aにおいて3次元構造解析モデルの節点座標を2次元軸対称解析座標系に座標変換した座標X,Y,Zと節点状態データ、及び解析条件データを3次元構造解析モデルの節点数分保持する。節点状態データは0または1であり、その節点に解析条件データを設定済かどうかを示すフラグである。0は未設定、1は設定済を示すものとする。まず、ステップ4001で3次元構造解析モデルの節点状態データを全て0に初期化する。つまり全節点が解析条件データ未設定とする。次にステップ4002で、3次元構造解析モデルの座標変換後の節点N1を取り出す。ステップ4003では、節点N1が存在するかどうか判定し、存在しなければ、ステップ4010へ移る。節点N1が存在すれば、ステップ4004において、2次元軸対称モデルの節点N2を取り出す。ステップ4005では、節点N2が存在するかどうか判定し、存在しなければ、ステップ4002に戻る。N2が存在すれば、ステップ4006で、同一節点座標判定部6bにおいて、N1とN2との距離Dを計算し、ステップ4007でDが閾値未満かどうかを調べる。閾値未満であれば、N1とN2は同一点座標であると判断し、3次元構造解析モデル条件設定部6fにおいてステップ4008でN1の節点状態データを1にセットし、ステップ4009でN2の解析結果データをN1の解析条件データにセットする。ステップ4007でDが閾値を超えている場合は、ステップ4004に戻る。以上ステップ4003で、節点N1が無くなるまで同一節点座標判定部6bにおいて、ステップ4001からステップ4009までの同一点座標判定を繰り返す。
【0017】
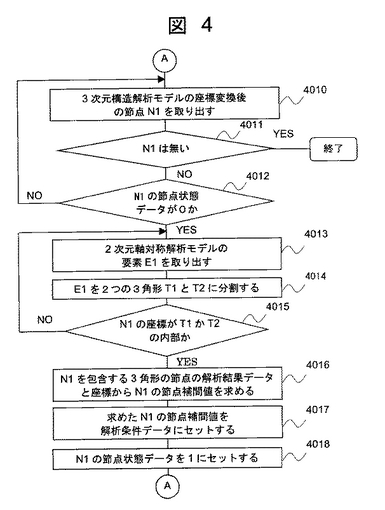
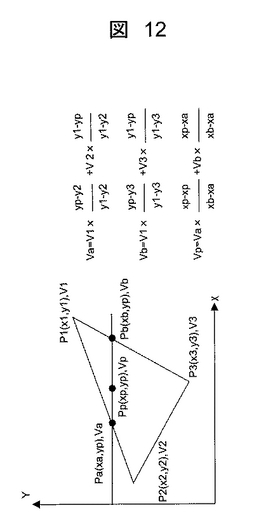
図10に同一点座標判定後の節点状態データと解析条件データの一実施例を示す。図10に示すように、節点状態データ0の節点がまだ解析条件データが設定されていない。次に、図4の処理フローを説明する。ステップ4010では、3次元構造解析モデルの座標変換後の節点N1を取り出す。ステップ4011では、節点N1が存在するかどうか判定し、存在しなければ処理を終了する。節点N1が存在すれば、ステップ4012でN1の節点状態データが1の場合は、ステップ4010に戻り、節点状態データが0の場合は、ステップ4013以降の補間処理に移る。ステップ4013では、2次元モデル要素分割部6cにおいて、2次元軸対称解析モデルの要素E1を取り出す。要素E1は図7(b)に示すように4節点で構成されている。次にステップ4014で要素E1を節点NO1と節点NO2と節点NO4とから構成する3角形T1と、節点NO2と節点NO3と節点NO4とから構成する3角形T2に分割する。次にステップ4015で、節点座標の3角形内外判定部6dにおいて、ステップ4010で取り出した節点N1が、3角形T1またはT2の内部かどうかを判定し、内部でなければステップ4013に戻り、内部であれば、ステップ4016に移る。ステップ4016では、3次元構造解析モデル節点補間部6eにおいて、節点N1を包含する3角形の節点の解析結果データと座標から節点N1の節点値を補間して求め、3次元構造解析モデル条件設定部6fにおいて、ステップ4017で節点N1の解析条件データにセットし、更にステップ4018で節点N1の節点状態データに1をセットして、ステップ4010に戻る。以上ステップ4011で、節点N1が無くなるまでステップ4010からステップ4018までの補間処理を繰り返す。補間処理の一実施例を図12に示す。点P1,P2、及びP3からなる3角形内部の点をPpとし、Ppを通りX軸に平行な直線と3角形の辺の交点をPa及びPbとし、P1,P2,P3の節点値をV1,V2,V3とすると、Pbでの補間値は図12に示す式のVpとすることができる。
【0018】
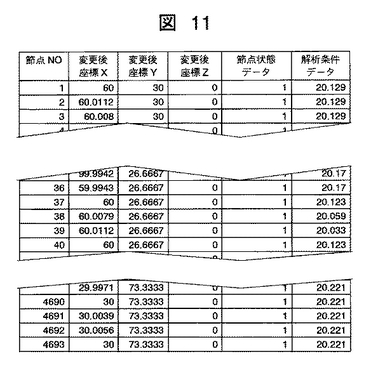
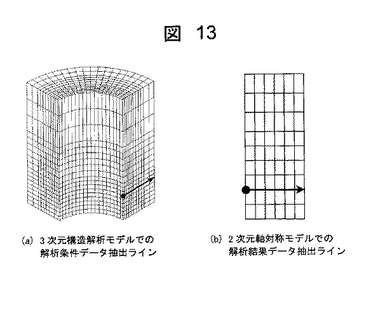
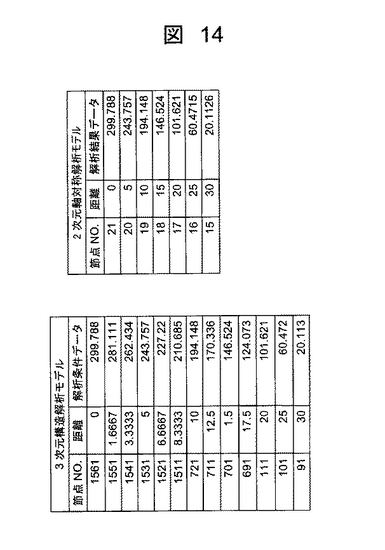
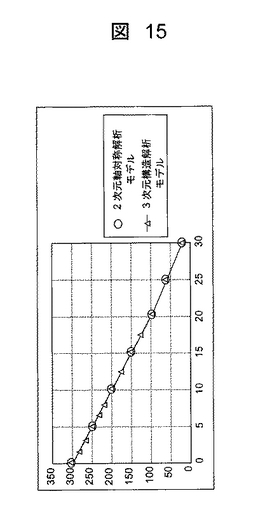
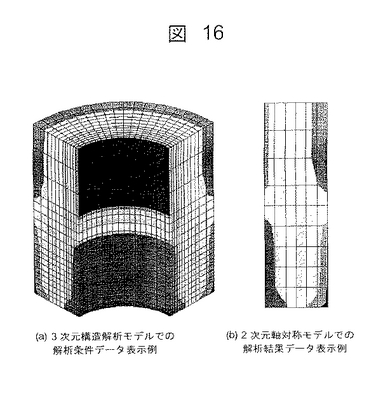
図11には補間処理後の節点状態データと解析条件データの一実施例を示す。図10では節点状態データが0であった節点の節点状態データは1となり解析条件データが設定されている。次に本実施例において、2次元軸対称解析結果から自動生成した、3次元構造解析モデルの解析条件データの妥当性を見るために、図13に示すように、3次元構造解析モデルと2次元軸対称解析モデルの解析条件データと解析結果データが対応するラインを抽出し比較する。図13(a)は3次元構造解析モデルでの解析条件データ抽出ラインを示し、図13(b)は2次元軸対称モデルでの解析結果データ抽出ラインを示す。図14には抽出したラインの3次元構造解析モデルの解析条件データと2次元軸対称解析モデルの解析結果データの一実施例を示す。図15には、抽出したラインの3次元構造解析モデルの解析条件データと2次元軸対称解析モデルの解析結果データをグラフで表示装置1に表示した一実施例を示す。図15で、○で示す点が2次元軸対称解析モデルの解析結果データ、△で示す点が3次元構造解析モデルの解析条件データを示し、よく一致しているのがわかる。図16には、3次元構造解析モデルと2次元軸対称解析モデル上に3次元構造解析モデルの解析条件データと2次元軸対称解析モデルの解析結果データを表示した一実施例を示す。図16に示すように、2次元軸対称モデルの要素形状と3次元解析モデルの任意断面内部の要素形状や座標系が異なる場合でも、2次元軸対称モデルの解析結果から、3次元構造解析モデルの解析条件データが自動生成されている。
【0019】
最後に、図2のステップ5000で3次元構造解析条件データ処理部6iにおいて、作業用メモリ5から3次元構造解析条件データを記憶装置4に出力するようになっている。
【0020】
以上のように、3次元構造解析データ生成装置を使用して、2次元軸対称解析モデルの要素形状を2つの3角形に分割し、節点座標が3角形内部にあるかどうかを判定し、3角形内部の節点座標と3角形の頂点座標と3角形の頂点に対応する2次元軸対称解析結果から3角形内部の節点座標に対応する節点値を補間して求めて、3次元構造モデルの節点についての解析データを求めることを特徴する3次元構造解析条件データ生成方法が構成される。
【図面の簡単な説明】
【0021】
【図1】3次元構造解析条件データ生成装置の構成の一実施例を示す図。
【図2】3次元構造解析条件データ生成装置における処理フローの一実施例を示す図。
【図3】図2におけるステップ4000の詳細フローの一実施例を示す図(1)。
【図4】図2におけるステップ4000の詳細フローの一実施例を示す図(2)。
【図5】2次元軸対称解析モデルの一実施例を示す図。
【図6】3次元構造解析モデルの一実施例を示す図。
【図7(a)】2次元軸対称解析結果データの一実施例を示す図で、節点座標と解析結果データを示す図。
【図7(b)】2次元軸対称解析結果データの一実施例を示す図で、要素を構成する節点データを示す図。
【図8】3次元構造解析モデルデータの一実施例を示す図。
【図9】3次元構造解析モデルの節点座標を2次元軸対称解析座標系に座標変換した実施例を示す図。
【図10】同一点座標判定後の節点状態データと解析条件データの一実施例を示す図。
【図11】補間処理後の節点状態データと解析条件データの一実施例を示す図。
【図12】補間方法の一実施例を示す図。
【図13】3次元構造解析モデルと2次元軸対称解析モデルの解析条件データと解析結果データ抽出ラインの一実施例を示す図。
【図14】抽出したラインの解析条件データと解析結果データの一実施例を示す図。
【図15】抽出したラインの解析条件データと解析結果データをグラフ表示した一実施例を示す図。
【図16】3次元構造解析モデルと2次元軸対称解析モデル上に表示した一実施例を示す図。
【符号の説明】
【0022】
1…表示装置、2…入力装置、3…演算処理装置、4…記憶装置、5…作業用データメモリ、6…3次元構造解析条件データ自動マッピング装置、6a…3次元モデル節点座標変換部、6b…同一節点座標判定部、6c…2次元モデル要素分割部、6d…節点座標の3角形内外判定部、6e…3次元構造解析モデル節点値補間部、6f…3次元解析モデル条件設定部、6g…2次元軸対称解析結果読み込み部、6h…3次元構造解析モデルデータ読み込み部、6i…3次元構造解析条件データ処理部。
【技術分野】
【0001】
本発明は、3次元構造解析条件データ生成技術に係わり、特に2次元軸対称モデルの解析結果から、その2次元軸対称モデル形状を軸回りに回転して得られる3次元形状と相似とみなせる3次元構造解析モデルの解析条件データを自動生成する装置および方法に関する。
【背景技術】
【0002】
現在製品設計において3次元CAE(computer−aided engineering)ソフトウェアを用いた構造解析による設計が一般的になってきており、例えば圧力容器などの対称構造体の熱的健全性を評価する場合、まず2次元軸対称モデルで温度伝導解析を行い節点温度を求め、その求めた温度を用いて熱応力解析を実施して応力などの発生状態を把握し、次に3次元モデルを用いた詳細な解析・評価を行う方法が一例としてあげられる。この場合3次元モデルによる解析を実施するには2次元軸対称モデルで求めた節点温度などの条件を、3次元解析モデルに反映させ詳細解析を実施し解を求め、最終的な製品の構造上の健全性を評価する手順となる。しかしながら2次元軸対称解析の結果を3次元構造解析モデルの解析条件に設定するためには、3次元構造解析モデルの各節点に対し2次元軸対称解析の結果を当てはめる必要があり、従来は人間が3次元構造解析モデルの節点座標と2次元軸対称モデルの節点座標との関係を判断し、手動で3次元構造解析条件の節点値として入力していたため、多大な工数を必要とし、また転記ミスなどの理由で解析結果の信頼性確保にも問題を起こす要因となっていた。
【0003】
そこで2次元軸対称モデルの解析結果を、自動的に3次元構造解析モデルの条件データとして反映できることが望まれていた。2次元軸対称モデルの解析結果を、自動的に3次元構造解析モデルの条件データとして反映する技術としては、一例として特許文献1に示されているが、2次元軸対称モデルの要素形状と3次元構造解析モデルの任意の断面の要素形状が同一であることが前程であり、任意断面内部の要素形状や座標系が異なる場合の2次元軸対称モデルの解析結果を、自動的に3次元構造解析モデルの条件データとして反映する技術は見あたらない。
【0004】
【特許文献1】特開平5−288635号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明の目的は、2次元軸対称モデルの要素形状と3次元構造解析モデルの任意断面内部の要素形状や座標系が異なる場合でも、2次元軸対称モデルの解析結果から、3次元構造解析モデルの解析条件データを自動生成する装置および方法を提供することにある。
【課題を解決するための手段】
【0006】
表示装置,入力装置,記憶装置,作業用データメモリ及び演算処理装置からなる3次元構造解析条件データ生成装置において、前記演算処理装置は2次元軸対称解析結果から、3次元構造解析モデルの解析条件データを自動生成する3次元構造解析条件データ自動マッピング装置を有し、3次元構造解析条件データ自動マッピング装置は、2次元軸対称解析結果読み込み部と、3次元構造解析モデルデータ読み込み部と、3次元構造解析条件データ処理部と、3次元構造解析モデルの節点座標を2次元軸対称解析座標系へ座標変換する、3次元モデル節点座標変換部と、変換した座標と2次元軸対称解析モデルの節点座標との距離を判定し同一点と判定された場合、2次元軸対称解析モデルの節点の解析結果を3次元構造解析モデルの節点の解析条件データとして求める、同一節点座標判定部と、同一点として判定されなかった3次元構造解析モデルの節点の解析条件データを求めるため、2次元モデル要素分割部と、点座標が3角形内部にあるかどうかを判定する点座標の3角形内外判定部と、3角形内部の点座標と3角形の頂点座標と3角形の頂点に対応する2次元軸対称解析結果から3角形内部の点座標に対応する節点値を補間して求める、3次元モデル節点値補間部と、解析条件データ設定部を有することを特徴とした3次元構造解析条件データ生成装置および方法にある。
【発明の効果】
【0007】
本発明の3次元構造解析条件データ生成装置は、2次元軸対称モデルの要素形状と3次元構造解析モデルの任意断面内部の要素形状や座標系が異なる場合でも、2次元軸対称モデルの解析結果から、3次元構造解析モデルの解析条件データを自動生成することにより、従来は人間が3次元構造解析モデルの節点座標と2次元軸対称モデルの節点座標との関係を判断し、手動で3次元構造解析条件の節点値として入力していた多大な工数を削減することが可能になり、また転記ミスなどをなくすことで解析結果の信頼性を確保することが可能になる。
【発明を実施するための最良の形態】
【0008】
上述の3次元構造解析条件データ生成方法は、3次元構造解析データ生成装置を使用して、2次元軸対称解析モデルの要素形状を2つの3角形に分割し、節点座標が3角形内部にあるかどうかを判定し、3角形内部の節点座標と3角形の頂点座標と3角形の頂点に対応する2次元軸対称解析結果から3角形内部の節点座標に対応する節点値を補間して求めて、3次元構造モデルの節点についての解析データを求めることを特徴とする。
【実施例1】
【0009】
以下、本発明の実施の形態を、図を用いて説明する。
【0010】
図1は、本発明による3次元構造解析条件データ生成装置の構成の一実施例を示したものである。
【0011】
本発明の3次元構造解析条件データ生成装置は、表示装置1,入力装置2,記憶装置4,作業用データメモリ5及び演算処理装置3からなる3次元構造解析条件データ生成装置において、前記演算処理装置3は2次元軸対称解析結果から、3次元構造解析モデルの解析条件データを自動生成する3次元構造解析条件データ自動マッピング装置6を有し、前記3次元構造解析条件データ自動マッピング装置6は、2次元軸対称解析結果データを入力装置2から指示し記憶装置4から作業用メモリ5に読み込む、2次元軸対称解析結果読み込み部6gと、3次元構造解析モデルデータを入力装置2から指示し記憶装置4から作業用データメモリ5に読み込む、3次元構造解析モデルデータ読み込み部6hと、3次元構造解析条件データ自動マッピング装置6で自動生成した3次元構造解析条件データを記憶装置4または表示装置1に出力する、3次元構造解析条件データ処理部6iと、前記3次元構造解析モデルデータ読み込み部6hで読み込んだ3次元構造解析モデルの節点座標を、2次元軸対称解析座標系へ座標変換する、3次元モデル節点座標変換部6aと、前記3次元モデル節点座標変換部6aで変換した座標と2次元軸対称解析モデルの節点座標との距離を判定し同一点と判定した場合、2次元軸対称解析モデルの節点の解析結果を3次元構造解析モデルの節点の解析条件データとして求める、同一節点座標判定部6bと、前記同一節点座標判定部6bでは、同一点として判定されなかった3次元構造解析モデルの節点の解析条件データを求めるため、2次元軸対称解析モデルの要素形状を2つの3角形に分割する2次元モデル要素分割部6cと、節点座標が3角形内部にあるかどうかを判定する節点座標の3角形内外判定部6dと、3角形内部の節点座標と3角形の頂点座標と3角形の頂点に対応する2次元軸対称解析結果から3角形内部の節点座標に対応する節点値を補間して求める、3次元モデル節点値補間部6eと、前記同一節点座標判定部6bまたは、3次元構造解析モデル節点値補間部6eで求めた、3次元構造解析モデルの各節点の解析条件データを設定する解析条件データ設定部6fを有する。
【0012】
図2は、本発明による3次元構造解析条件データ自動マッピング装置6における処理フローの一実施例を示したものであり、図3、及び図4は図2におけるステップ4000の詳細フローの一実施例を示したものである。図5は本実施例による2次元軸対称解析モデルの好適な一実施例を示す。図5に示すように2次元軸対称解析モデルは、Y軸を中心軸としてXY平面上に形状を定義した例である。図6は本実施例による3次元構造解析モデルの好適な一実施例を示す(図6(a))。図6に示すように3次元構造解析モデルはZ軸を中心軸としてXZ平面状に定義した要素形状を90度回転して得られる形状を定義した例である。図6の(b)に示すように3次元構造解析モデルの任意断面が2次元軸対称解析モデルと座標系及び断面の内部の要素形状が異なっている場合の一実施例である。
【0013】
次に本実施例による3次元構造解析条件データ自動マッピング装置の処理手順の一実施例を図2,図3,図4を用いて説明する。
【0014】
まずステップ1000で、2次元軸対称解析結果読み込み部6gにおいて、入力装置2から指示した2次元軸対称解析結果データを記憶装置4から作業用データメモリ5に読み込む。2次元軸対称解析結果は、2次元軸対称モデルの節点座標データと、解析結果の節点値と、2次元要素の構成節点番号とからなる。図7に図5に示す2次元軸対称解析モデルの2次元軸対称解析結果データの一実施例を示す。図7(a)は節点座標と解析結果を示し、図7(b)は要素を構成する節点データを示す。次にステップ2000で、3次元構造解析モデルデータ読込み部6hにおいて、入力装置2から支持した3次元構造解析モデルデータを記憶装置4から作業用データメモリ5読み込む。3次元構造解析モデルデータは3次元構造解析モデルの節点座標であり、図8に3次元構造解析モデルデータの一実施例を示す。次にステップ3000で、3次元構造解析条件データ自動マッピング装置6の3次元モデル節点座標変換部6aにおいて、ステップ2000で読み込んだ3次元構造解析モデルデータの節点座標を、2次元軸対称解析座標系に座標変換する。図5に示す2次元軸対称解析モデルと図6に示す3次元構造解析モデルの場合、3次元構造解析モデルのX−Y平面上の節点座標と原点との距離を、2次元軸対称解析座標系におけるX座標とし、3次元構造解析モデルのZ座標を2次元軸対称解析座標系におけるY座標とすることができる。図9に3次元構造解析モデルの節点座標を2次元軸対称解析座標系に座標変換した実施例を示す。
【0015】
次に、ステップ4000で、3次元構造解析条件データ自動マッピング装置6の同一節点座標判定部6bと2次元モデル要素分割部6cと節点座標の3角形内外判定部6dと3次元構造解析モデル節点値補間部6eと解析条件データ設定部6fで、2次元軸対称解析結果を3次元構造解析モデルの各節点値にマッピングする。ステップ4000の詳細な処理内容を図3,図4を用いて説明する。
【0016】
作業用データメモリ5には、図10に示すように、3次元モデル節点座標変換部6aにおいて3次元構造解析モデルの節点座標を2次元軸対称解析座標系に座標変換した座標X,Y,Zと節点状態データ、及び解析条件データを3次元構造解析モデルの節点数分保持する。節点状態データは0または1であり、その節点に解析条件データを設定済かどうかを示すフラグである。0は未設定、1は設定済を示すものとする。まず、ステップ4001で3次元構造解析モデルの節点状態データを全て0に初期化する。つまり全節点が解析条件データ未設定とする。次にステップ4002で、3次元構造解析モデルの座標変換後の節点N1を取り出す。ステップ4003では、節点N1が存在するかどうか判定し、存在しなければ、ステップ4010へ移る。節点N1が存在すれば、ステップ4004において、2次元軸対称モデルの節点N2を取り出す。ステップ4005では、節点N2が存在するかどうか判定し、存在しなければ、ステップ4002に戻る。N2が存在すれば、ステップ4006で、同一節点座標判定部6bにおいて、N1とN2との距離Dを計算し、ステップ4007でDが閾値未満かどうかを調べる。閾値未満であれば、N1とN2は同一点座標であると判断し、3次元構造解析モデル条件設定部6fにおいてステップ4008でN1の節点状態データを1にセットし、ステップ4009でN2の解析結果データをN1の解析条件データにセットする。ステップ4007でDが閾値を超えている場合は、ステップ4004に戻る。以上ステップ4003で、節点N1が無くなるまで同一節点座標判定部6bにおいて、ステップ4001からステップ4009までの同一点座標判定を繰り返す。
【0017】
図10に同一点座標判定後の節点状態データと解析条件データの一実施例を示す。図10に示すように、節点状態データ0の節点がまだ解析条件データが設定されていない。次に、図4の処理フローを説明する。ステップ4010では、3次元構造解析モデルの座標変換後の節点N1を取り出す。ステップ4011では、節点N1が存在するかどうか判定し、存在しなければ処理を終了する。節点N1が存在すれば、ステップ4012でN1の節点状態データが1の場合は、ステップ4010に戻り、節点状態データが0の場合は、ステップ4013以降の補間処理に移る。ステップ4013では、2次元モデル要素分割部6cにおいて、2次元軸対称解析モデルの要素E1を取り出す。要素E1は図7(b)に示すように4節点で構成されている。次にステップ4014で要素E1を節点NO1と節点NO2と節点NO4とから構成する3角形T1と、節点NO2と節点NO3と節点NO4とから構成する3角形T2に分割する。次にステップ4015で、節点座標の3角形内外判定部6dにおいて、ステップ4010で取り出した節点N1が、3角形T1またはT2の内部かどうかを判定し、内部でなければステップ4013に戻り、内部であれば、ステップ4016に移る。ステップ4016では、3次元構造解析モデル節点補間部6eにおいて、節点N1を包含する3角形の節点の解析結果データと座標から節点N1の節点値を補間して求め、3次元構造解析モデル条件設定部6fにおいて、ステップ4017で節点N1の解析条件データにセットし、更にステップ4018で節点N1の節点状態データに1をセットして、ステップ4010に戻る。以上ステップ4011で、節点N1が無くなるまでステップ4010からステップ4018までの補間処理を繰り返す。補間処理の一実施例を図12に示す。点P1,P2、及びP3からなる3角形内部の点をPpとし、Ppを通りX軸に平行な直線と3角形の辺の交点をPa及びPbとし、P1,P2,P3の節点値をV1,V2,V3とすると、Pbでの補間値は図12に示す式のVpとすることができる。
【0018】
図11には補間処理後の節点状態データと解析条件データの一実施例を示す。図10では節点状態データが0であった節点の節点状態データは1となり解析条件データが設定されている。次に本実施例において、2次元軸対称解析結果から自動生成した、3次元構造解析モデルの解析条件データの妥当性を見るために、図13に示すように、3次元構造解析モデルと2次元軸対称解析モデルの解析条件データと解析結果データが対応するラインを抽出し比較する。図13(a)は3次元構造解析モデルでの解析条件データ抽出ラインを示し、図13(b)は2次元軸対称モデルでの解析結果データ抽出ラインを示す。図14には抽出したラインの3次元構造解析モデルの解析条件データと2次元軸対称解析モデルの解析結果データの一実施例を示す。図15には、抽出したラインの3次元構造解析モデルの解析条件データと2次元軸対称解析モデルの解析結果データをグラフで表示装置1に表示した一実施例を示す。図15で、○で示す点が2次元軸対称解析モデルの解析結果データ、△で示す点が3次元構造解析モデルの解析条件データを示し、よく一致しているのがわかる。図16には、3次元構造解析モデルと2次元軸対称解析モデル上に3次元構造解析モデルの解析条件データと2次元軸対称解析モデルの解析結果データを表示した一実施例を示す。図16に示すように、2次元軸対称モデルの要素形状と3次元解析モデルの任意断面内部の要素形状や座標系が異なる場合でも、2次元軸対称モデルの解析結果から、3次元構造解析モデルの解析条件データが自動生成されている。
【0019】
最後に、図2のステップ5000で3次元構造解析条件データ処理部6iにおいて、作業用メモリ5から3次元構造解析条件データを記憶装置4に出力するようになっている。
【0020】
以上のように、3次元構造解析データ生成装置を使用して、2次元軸対称解析モデルの要素形状を2つの3角形に分割し、節点座標が3角形内部にあるかどうかを判定し、3角形内部の節点座標と3角形の頂点座標と3角形の頂点に対応する2次元軸対称解析結果から3角形内部の節点座標に対応する節点値を補間して求めて、3次元構造モデルの節点についての解析データを求めることを特徴する3次元構造解析条件データ生成方法が構成される。
【図面の簡単な説明】
【0021】
【図1】3次元構造解析条件データ生成装置の構成の一実施例を示す図。
【図2】3次元構造解析条件データ生成装置における処理フローの一実施例を示す図。
【図3】図2におけるステップ4000の詳細フローの一実施例を示す図(1)。
【図4】図2におけるステップ4000の詳細フローの一実施例を示す図(2)。
【図5】2次元軸対称解析モデルの一実施例を示す図。
【図6】3次元構造解析モデルの一実施例を示す図。
【図7(a)】2次元軸対称解析結果データの一実施例を示す図で、節点座標と解析結果データを示す図。
【図7(b)】2次元軸対称解析結果データの一実施例を示す図で、要素を構成する節点データを示す図。
【図8】3次元構造解析モデルデータの一実施例を示す図。
【図9】3次元構造解析モデルの節点座標を2次元軸対称解析座標系に座標変換した実施例を示す図。
【図10】同一点座標判定後の節点状態データと解析条件データの一実施例を示す図。
【図11】補間処理後の節点状態データと解析条件データの一実施例を示す図。
【図12】補間方法の一実施例を示す図。
【図13】3次元構造解析モデルと2次元軸対称解析モデルの解析条件データと解析結果データ抽出ラインの一実施例を示す図。
【図14】抽出したラインの解析条件データと解析結果データの一実施例を示す図。
【図15】抽出したラインの解析条件データと解析結果データをグラフ表示した一実施例を示す図。
【図16】3次元構造解析モデルと2次元軸対称解析モデル上に表示した一実施例を示す図。
【符号の説明】
【0022】
1…表示装置、2…入力装置、3…演算処理装置、4…記憶装置、5…作業用データメモリ、6…3次元構造解析条件データ自動マッピング装置、6a…3次元モデル節点座標変換部、6b…同一節点座標判定部、6c…2次元モデル要素分割部、6d…節点座標の3角形内外判定部、6e…3次元構造解析モデル節点値補間部、6f…3次元解析モデル条件設定部、6g…2次元軸対称解析結果読み込み部、6h…3次元構造解析モデルデータ読み込み部、6i…3次元構造解析条件データ処理部。
【特許請求の範囲】
【請求項1】
表示装置、入力装置、記憶装置、作業用データメモリ及び演算処理装置からなる3次元構造解析条件データ生成装置において、前記演算処理装置は2次元軸対称解析結果から、3次元構造解析モデルの解析条件データを自動生成する3次元構造解析条件データ自動マッピング装置を有し、前記3次元構造解析条件データ自動マッピング装置は、2次元軸対称解析結果データを入力装置から指示し記憶装置から作業用メモリに読み込む、2次元軸対称解析結果読み込み部と、3次元構造解析モデルデータを入力装置から指示し記憶装置から作業用データメモリに読み込む、3次元構造解析モデルデータ読み込み部と、3次元構造解析条件データ自動マッピング装置で自動生成した3次元構造解析条件データを記憶装置または表示装置に出力する、3次元構造解析条件データ処理部と、前記3次元構造解析モデルデータ読み込み部で読み込んだ3次元構造解析モデルの節点座標を、2次元軸対称解析座標系へ座標変換する、3次元モデル節点座標変換部と、前記3次元モデル節点座標変換部で変換した座標と2次元軸対称解析モデルの節点座標との距離を判定し同一点と判定した場合、2次元軸対称解析モデルの節点の解析結果を3次元構造解析モデルの節点の解析条件データとして求める、同一節点座標判定部と、前記同一節点座標判定部では、同一点として判定されなかった3次元構造解析モデルの節点の解析条件データを求めるため、2次元軸対称解析モデルの要素形状を2つの3角形に分割する2次元モデル要素分割部と、節点座標が3角形内部にあるかどうかを判定する節点座標の3角形内外判定部と、3角形内部の節点座標と3角形の頂点座標と3角形の頂点に対応する2次元軸対称解析結果から3角形内部の節点座標に対応する節点値を補間して求める、3次元モデル節点値補間部と、前記同一節点座標判定部または、3次元モデル節点値補間部で求めた、3次元構造解析モデルの各節点の解析条件データを設定する解析条件データ設定部を有することを特徴とした3次元構造解析条件データ生成装置。
【請求項2】
請求項1の3次元構造解析データ生成装置を使用して、2次元軸対称解析モデルの要素形状を2つの3角形に分割し、節点座標が3角形内部にあるかどうかを判定し、3角形内部の節点座標と3角形の頂点座標と3角形の頂点に対応する2次元軸対称解析結果から3角形内部の節点座標に対応する節点値を補間して求めて、3次元構造モデルの節点についての解析データを求めることを特徴とする3次元構造解析条件データ生成方法。
【請求項3】
請求項2において、3次元構造解析モデルの各節点の解析データを前記表示装置に表示することを特徴とする3次元構造解析データ表示方法。
【請求項1】
表示装置、入力装置、記憶装置、作業用データメモリ及び演算処理装置からなる3次元構造解析条件データ生成装置において、前記演算処理装置は2次元軸対称解析結果から、3次元構造解析モデルの解析条件データを自動生成する3次元構造解析条件データ自動マッピング装置を有し、前記3次元構造解析条件データ自動マッピング装置は、2次元軸対称解析結果データを入力装置から指示し記憶装置から作業用メモリに読み込む、2次元軸対称解析結果読み込み部と、3次元構造解析モデルデータを入力装置から指示し記憶装置から作業用データメモリに読み込む、3次元構造解析モデルデータ読み込み部と、3次元構造解析条件データ自動マッピング装置で自動生成した3次元構造解析条件データを記憶装置または表示装置に出力する、3次元構造解析条件データ処理部と、前記3次元構造解析モデルデータ読み込み部で読み込んだ3次元構造解析モデルの節点座標を、2次元軸対称解析座標系へ座標変換する、3次元モデル節点座標変換部と、前記3次元モデル節点座標変換部で変換した座標と2次元軸対称解析モデルの節点座標との距離を判定し同一点と判定した場合、2次元軸対称解析モデルの節点の解析結果を3次元構造解析モデルの節点の解析条件データとして求める、同一節点座標判定部と、前記同一節点座標判定部では、同一点として判定されなかった3次元構造解析モデルの節点の解析条件データを求めるため、2次元軸対称解析モデルの要素形状を2つの3角形に分割する2次元モデル要素分割部と、節点座標が3角形内部にあるかどうかを判定する節点座標の3角形内外判定部と、3角形内部の節点座標と3角形の頂点座標と3角形の頂点に対応する2次元軸対称解析結果から3角形内部の節点座標に対応する節点値を補間して求める、3次元モデル節点値補間部と、前記同一節点座標判定部または、3次元モデル節点値補間部で求めた、3次元構造解析モデルの各節点の解析条件データを設定する解析条件データ設定部を有することを特徴とした3次元構造解析条件データ生成装置。
【請求項2】
請求項1の3次元構造解析データ生成装置を使用して、2次元軸対称解析モデルの要素形状を2つの3角形に分割し、節点座標が3角形内部にあるかどうかを判定し、3角形内部の節点座標と3角形の頂点座標と3角形の頂点に対応する2次元軸対称解析結果から3角形内部の節点座標に対応する節点値を補間して求めて、3次元構造モデルの節点についての解析データを求めることを特徴とする3次元構造解析条件データ生成方法。
【請求項3】
請求項2において、3次元構造解析モデルの各節点の解析データを前記表示装置に表示することを特徴とする3次元構造解析データ表示方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7(a)】
【図7(b)】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7(a)】
【図7(b)】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2006−53781(P2006−53781A)
【公開日】平成18年2月23日(2006.2.23)
【国際特許分類】
【出願番号】特願2004−235384(P2004−235384)
【出願日】平成16年8月12日(2004.8.12)
【出願人】(390023928)日立エンジニアリング株式会社 (134)
【Fターム(参考)】
【公開日】平成18年2月23日(2006.2.23)
【国際特許分類】
【出願日】平成16年8月12日(2004.8.12)
【出願人】(390023928)日立エンジニアリング株式会社 (134)
【Fターム(参考)】
[ Back to top ]