
3次元画像ボリュームの再構成方法およびX線装置
【課題】大きな関心領域の場合にもかつ360°を下回る走査軌道の場合にもアーチファクトのない再構成を可能にする関心領域の2次元投影画像から3次元画像ボリュームの再構成方法を提供する。
【解決手段】各2次元投影画像がそれぞれ少なくとも2つの個別投影画像から1つの拡張された2次元投影画像に合成され、それぞれ少なくとも2つの個別投影画像が焦点(15)と関心領域(5)との間の一定の相対的位置において撮影され、それぞれ少なくとも2つの個別投影画像は、焦点(15)および関心領域(5)が一定の相対的位置にて互いに異なって位置決めされかつ撮影システム(3;4)が焦点(15)を中心にしてまたは焦点(15)を通る回転軸線を中心にして異なって回転させられるように異なっている。
【解決手段】各2次元投影画像がそれぞれ少なくとも2つの個別投影画像から1つの拡張された2次元投影画像に合成され、それぞれ少なくとも2つの個別投影画像が焦点(15)と関心領域(5)との間の一定の相対的位置において撮影され、それぞれ少なくとも2つの個別投影画像は、焦点(15)および関心領域(5)が一定の相対的位置にて互いに異なって位置決めされかつ撮影システム(3;4)が焦点(15)を中心にしてまたは焦点(15)を通る回転軸線を中心にして異なって回転させられるように異なっている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、焦点を有するX線源と検出器とを備えた撮影システムが関心領域の周りを回転する間に撮影された関心領域の複数の2次元投影画像から3次元画像ボリュームを、画像ボリュームのボクセルのグレー値を投影画像の逆投影により算出することによって再構成する3次元画像ボリュームの再構成方法、ならびにこの種の方法を実施するためのX線装置に関する。
【背景技術】
【0002】
今日におけるCアーム装置による3次元コーンビーム再構成の場合に、撮影ジオメトリ(検出器寸法および焦点距離)によって規定される最大幅を上回る特定身体部位(例えば腹部または胸部)において、いわゆる広幅対象(ワイドオブジェクト)の問題が発生する。フィルタ逆投影による3D再構成のために重要な処理ステップは、検出器において水平に、またはほぼ水平に延びるラインに沿った投影データのフィルタ処理である。
【0003】
(例えばランプフィルタまたはヒルベルトフィルタのように)フィルタ核の非局所的な性質に基づいて、たとえ関心領域(Region of Interest,ROI)の一部分のみが再構成されるべきであっても、フィルタラインは検査範囲の全ての投影を通り抜けなければならず、遮断されてはならない。しかしながら、多くの撮影において、限られた検出器幅が関心領域のトランスアキシャルに遮断された投影をもたらす。なぜならば、関心領域を撮像視野(Field of View,FoV)によって完全に網羅することができないからである。これは、これらの投影において遮断されたフィルタラインをもたらす。その結果、強い再構成アーチファクト、例えばいわゆるトランケーションアーチファクトが生じる。これらのアーチファクトは結果を歪曲し、専門的な診断を妨害し、困難にし、あるいは不可能にする。
【0004】
いわゆる広幅対象の問題は、今日におけるフィルタ逆投影に基づいて動作する再構成アルゴリズム(FBPアルゴリズム)のほとんど全てに、すなわち大多数に関係する。これは、特に焦点の円状走査軌道のために設計されている公知のフェルドカンプアルゴリズム(例えば、非特許文献1参照)に対して当てはまる。最近の正確な再構成方法(例えば、非特許文献2および非特許文献3参照)は、走査のために拡張された軌道曲線(例えば、円および線、円および円弧)を要求するが、この問題も有する。したがって、広幅対象の問題に耐え得る解決策は、コンピュータ断層撮影における再構成問題の解決のための重要かつ主要な役割であった。
【0005】
対象空間におけるフィルタ処理を逆投影後にはじめて実行しかつ投影データに対する局所的な計算ステップのみを許容する逆投影フィルタ処理(BPF)法は、遮断された投影をある程度まで迂回することができる。これは、スパイラル状の軌道曲線の例(例えば、非特許文献4および非特許文献5参照)および円状の軌道曲線の例(例えば、非特許文献6参照)で具体的に説明されている。BPFの試みは、幾つかの事例において、遮断された投影の問題を解決し、検査範囲内の関心領域(ROI)のアーチファクトのない再構成を可能にする。
【0006】
更に、BPFの試みから導き出された類似の特性を有するFBP法が公知である(例えば、非特許文献7参照)。しかしながら、関心領域が撮像視野(FoV)に制限されているので、この方法によってもしばしば完全な関心領域(例えば大きな患者の腹部)を再構成することができない。
【0007】
しかし、撮像視野(FoV)を拡張する方法も公知である。ここでは、検出器が光軸に関して対称でなくてある程度のずれをもって配置されている検出器ずらし法を例として挙げる(例えば、非特許文献8参照)。もちろん、検出器ずらし法は、少なくとも360°の角度範囲にわたる走査のための円状またはスパイラル状の軌道曲線を要求する。更に、この方法はコーンビームジオメトリにおいて近似的な撮像領域(FoV)拡張を具現し、したがって大きなコーン角においてアーチファクトをもたらす。
【0008】
類似の試みは遮断された投影データの見積もり法(外挿法)である。この方法では、欠けている線積分が、(例えば、コーン角が無視された状態で対向ビームの擬似冗長性のように)近似的な仮定に基づいて補足される(例えば、非特許文献9参照)。この方法の場合にも、360°の走査のための軌道曲線が必要である。特に、最後の方法はFDKアルゴリズムの拡張として理解される。
【先行技術文献】
【非特許文献】
【0009】
【非特許文献1】L.A.Feldkamp,L.C.Davis,J.W.Kress:"Practical Cone−Beam Algorithm",J.Opt.Soc.Am.A,Vol.1,No.6,pp.612−619
【非特許文献2】A.Katsevich:"Image Reconstraction for the Circle and Arc Trajectory",Physics in Medicine and Biology,Vol.50,pp.2249−2265,April 2005
【非特許文献3】J.Pack,F.Noo:"Cone−Beam Reconstruction Using 1D Filtering Along the Projection of M−Lines",Inverse Problems,Vol.21,pp.1105−1120,April 2005
【非特許文献4】J.Pack,F.Noo,R.Clackdoyle:"Cone−Beam Reconstruction Using the Backprojection of Locally Filtered Projections",IEEETransactions on Medical Imaging,Vol.24,No.1,pp.70−85,January 2005
【非特許文献5】E.Y.Sidky,Y.Zou,X.Pan:"Minimum Data Image Reconstruction Algorithrns with Shift−Invariant Filtering for Helical,Cone−Beam CT"、Physics in Medicine and Biology,Vol.50,pp.1643−1657,2005
【非特許文献6】L.Yu,D.Xia,Y.Zou,X.Pan,C.Pelizzari,P.Munro:"Region of Interest Reconstruction from Truncated Data in Circular Cone−Beam CT",Proceedings of the SPIE,Vol.5747,pp.412−418,2005
【非特許文献7】E.Y.Sidky,Y.Zou,X.Pan:"A Minimum Data FBP−Type Algorithm for Image Reconstruction in Cone−Beam CT",Eighth International Meeting on Fully Three−Dimensional Image Reconstruction in Radiology and Nuclear Medicine,Salt Lake City,Utah,6−9 July,2005
【非特許文献8】V.Liu,N.R.Lariviere,G.Wang:"X−Ray Micro−CT with a Displaced Detector Array:Application to helical cone−beam reconstruction",Medical Physics,Vol.30,No.10,pp.2758−2761,October 2003
【非特許文献9】P.S.Cho,A.D.Rudd,R.H.Johnson:"Cone−Beam CT from Width−Truncated Projections",Computerized Medical Imaging and Graphics,Vol.20,No.1,pp.49−57,1996
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明の課題は、大きな関心領域の場合にもかつ360°を下回る走査軌道の場合にもアーチファクトのない再構成を可能にする関心領域の2次元投影画像から3次元画像ボリュームの再構成方法を提供することにある。更に、本発明の課題はこの方法の実施に適したX線装置を提供することにある。
【課題を解決するための手段】
【0011】
3次元画像ボリュームの再構成方に関する課題は、本発明によれば、焦点を有するX線源と検出器とを備えた撮影システムが関心領域の周りを回転する間に撮影された関心領域の複数の2次元投影画像から3次元画像ボリュームを、画像ボリュームのボクセルのグレー値を投影画像の逆投影により算出することによって再構成する3次元画像ボリュームの再構成方法であって、各2次元投影画像がそれぞれ少なくとも2つの個別投影画像から1つの拡張された2次元投影画像に合成され、それぞれ少なくとも2つの個別投影画像が焦点と関心領域との間の一定の相対的位置において撮影される3次元画像ボリュームの再構成方法において、それぞれ少なくとも2つの個別投影画像は、焦点および関心領域が一定の相対的位置にて互いに異なって位置決めされかつ撮影システムが焦点を中心にしてまたは焦点を通る回転軸線を中心にして異なって回転させられるように異なっていることにおよって解決される(請求項1)。
X線装置に関する課題は、本発明によれば、関心領域の2次元投影画像を撮影するためのX線源およびX線検出器を含む撮影システムと、2次元投影画像から3次元画像ボリュームを再構成するための制御および計算ユニットとを備え、撮影システムは、X線源とX線検出器との間における第1の回転中心の周りを回転可能であると共に、X線源の焦点における第2の回転中心を中心にしてまたはX線源の焦点を通る回転軸線を中心にして回転可能であることによって解決される(請求項15)。
【0012】
3次元画像ボリュームの再構成方法に関する本発明の有利な実施態様は次の通りである。
・それぞれ2つの個別投影画像が作成されて1つの拡張された投影画像に合成される(請求項2)。
・少なくとも2つの個別投影画像のそれぞれの回転角が一平面内に配置されている(請求項3)。
・焦点を中心とする撮影システムまたは関心領域のそれぞれの回転は、関心領域の周りにおける撮影システムの回転平面内にある(請求項4)。
・第1の個別投影画像は焦点を中心とするまたは焦点を通る回転軸線を中心とする撮影システムの第1の回転角において撮影され、第2の個別投影画像は焦点を中心とするまたは焦点を通る回転軸線を中心とする撮影システムの第2の回転角において撮影され、第1の回転角が負の第2の回転角に一致する(請求項5)。
・それぞれ合成される個別投影画像が0%よりも大きく50%よりも小さい相互の重なりを有する(請求項6)。
・それぞれ合成される個別投影画像が0%よりも大きく10%よりも小さい相互の重なりを有する(請求項7)。
・重なりが対象に依存して、特に対象の大きさに依存して設定される(請求項8)。
・投影画像の撮影順序は、先ず関心領域の周りにおける撮影システムの第1の回転循環において全ての第1の個別投影画像が撮影され、続いて関心領域の周りにおける撮影システムの第2の回転循環において全ての第2の個別投影画像が撮影されるように定められ、各第1の投影画像がそれぞれ1つの第2の投影画像と合成される(請求項9)。
・投影画像の撮影順序は、それぞれ1つの拡張2次元投影画像に合成されるそれぞれ少なくとも2つの個別投影画像が関心領域の周りにおける撮影システムの唯一の回転循環においてそれぞれ直接的な続きで撮影されるように定められている(請求項10)。
・投影画像を撮影するためにX線源から発生されるX線ビームがコーンビームの形状を有する(請求項11)。
・投影画像を撮影するためにX線源から発生されるX線ビームがファンビームの形状を有する(請求項12)。
・仮想検出器がX線検出器の検出器マトリックスのデカルト座標配置に基づいて構成されることによって、少なくとも2つの個別投影画像が合成される(請求項13)。
・仮想検出器がフィルタラインの配置に基づいて構成されることによって、少なくとも2つの個別投影画像が合成される(請求項14)。
【0013】
本発明による方法では、1つの拡張投影画像に合成される2つの(またはそれよりも多い)異なる個別投影画像を作成することによって、限られた検出器面、従って限られた視野(FoV)を拡張することができる。それによって関心領域(ROI)全体が表示可能である。
【0014】
それぞれ少なくとも2つの個別投影画像は、焦点と関心領域との間の一定の相対的位置において撮影される。この場合に一定の相対的位置とは、関心領域における2つの点と焦点とによって規定される三角形が一定の大きさを有することであると理解すべきである。
【0015】
更に、それぞれ少なくとも2つの個別の投影画像は、少なくとも2つの個別投影画像の照射のためのそれぞれのX線ビームが、連続して関心領域を網羅する拡張されたX線ビームに合成可能であるように選ばれている。
【0016】
本発明の第1の実施態様によれば、それぞれ少なくとも2つの個別投影画像は、焦点および関心領域が位置固定である際に撮影システムが焦点を中心にしてまたは焦点を通る回転軸線を中心にして回転する回転角に関して異なっている。2次元投影画像を撮影するための撮影システムが一般に関心領域内に置かれる第1の回転中心の周りを回転し、このようにして焦点の異なる曲線点について投影画像が作成されると共に、X線源に、特にX線源の焦点に第2の回転中心が存在し、それゆえ各曲線点について少なくとも2つの個別投影画像が撮影可能である。
【0017】
それによって、簡単かつ安価に、走査軌道曲線の全ての曲線点から2次元投影画像にて撮像(写像)可能でありかつアーチファクトなしに3次元に再構成可能である領域が拡張される。この場合に走査軌道曲線または軌跡はX線焦点の軌道によって規定される。
【0018】
軌跡の各曲線点において2つの(または2つよりも多い)個別投影画像が作成される。個々の撮影間の相違は、撮影システムがX線源を中心にして、特にX線源の焦点を中心にして異なる回転角を取ることにある。したがって、X線源とX線検出器とからなる撮影システムのX線源を中心とする回転が、X線からの付加的な画像情報の獲得を可能にする。
【0019】
それによって、個別投影画像間に、個別投影画像を補正により1つの大きな拡張された投影画像に合成するために利用することができるホモグラフィ関係が生じる。これはファンビームジオメトリにもコーンジオメトリにも当てはまる。このようにして検出器が仮想的に拡張され、部分的には本来の幅の何倍にも拡張される。このように拡大されたFoVによって当該身体領域が完全に捕捉可能になる。
【0020】
この場合にホモグラフィ(homography)は、点が或る2D座標系から他の2D座標系へ移される写像規則である。2つ又はそれ以上の平面に1つのX線ビームが交差する場合に、異なる平面の対応する交点の間にホモグラフィ関係が存在する。点が均一な座標において表されるならば、この関係は線形写像x'=H'xとして公式化することができる。ただし、xは元の点を示し、x'は変換された点を示し、3×3のマトリックスH'はホモグラフィ変換自体を示す。この場合に少なくとも2つの個別投影画像の合成は、実際のX線検出器に対して拡張された仮想検出器の構築とも呼ばれる。これは、本発明のどの代替策に基づいて2つ又はそれ以上の個別投影画像が撮影されたかには関係なく、当てはまる。
【0021】
本発明の第2の代替策によれば、それぞれ少なくとも2つの個別投影画像は、焦点および撮影システムが位置固定である際に関心領域が焦点の周りをまたは焦点を通る回転軸線の周りを回転する回転角に関して異なっている。
【0022】
本発明の第3の代替策によれば、それぞれ少なくとも2つの個別投影画像は、焦点および関心領域が一定の相対的位置にて互いに異なって位置決めされ撮影システムが焦点または焦点を通る回転軸線を中心にして回転させられる。
【0023】
本発明による方法もしくは本発明による方法の選択的な形態は、一方では、限られた検出器面積のために従来可能でなかった腹部や胸部のような大きな身体領域のアーチファクトのない完全な再構成を可能にする。他方では、身体領域全体の一部しか再構成されない関心領域再構成の際に、遮断された投影画像が厄介な再構成アーチファクトを生じることを回避することができる。その上、本発明による方法は、遮断された投影画像がアーチファクトをひき起こすあらゆる再構成アルゴリズムと効果的に組み合わせ可能であり、これは拡張として理解されるべきである。これは、特に、今日のCアーム装置において標準的に使用されるフェルドカンプ、デービスおよびクレスのアルゴリズムに対して当てはまる。なぜならば、これは円状走査軌道(軌跡)において水平なフィルタラインを有するからである。
【0024】
本発明による方法と公知の(近似的または正確な)再構成アルゴリズムとの組み合わせにおける重要な利点は、これらの公知の再構成アルゴリズムの変更の必要性がないことにある。仮想検出器は前処理ステップとして構成されるとよい。すなわち、再構成に使用された拡張投影画像が本来の再構成の前に2つ又はそれ以上の個別投影画像から合成され、引続いて再構成に使用される。撮影プロトコル、すなわち個別投影画像の撮影順序だけを相応に変更することができる。更に、本発明による方法は平坦形ならびに湾曲形の検出器に適し、ファンビームジオメトリにもコーンジオメトリにも適用可能である。
【0025】
安価な方法のために有利には、それぞれ正確に2つの個別値画像が作成されて1つの拡張投影画像に合成される。
【0026】
本発明の一実施態様によれば、少なくとも2つの個別投影画像のそれぞれの回転角が一平面内に配置されている。これによって、拡張投影画像への投影画像の合成の簡単化が保証される。
【0027】
少なくとも2つの個別投影画像の簡単な合成のために有利には、焦点を中心とするまたは焦点を通る回転軸線を中心とする撮影システムまたは関心領域の回転は、ほぼ関心領域の周りにおける撮影システムの回転平面内にあり、これは関心領域の周りにおける撮影システムの回転平面に対して直交して焦点を通る回転軸線を中心とする回転(傾斜)と同じ意味を持つ。この場合に、第1の個別投影画像は焦点を中心とするまたは焦点を通る回転軸線を中心とする撮影システムの第1の回転角において撮影され、第2の個別投影画像は焦点を中心とするまたは焦点を通る回転軸線を中心とする撮影システムの第2の回転角において撮影され、第1の回転角が負の第2の回転角に一致するならば、特に有利であることが分かった。この場合に基準点は、X線源の焦点からX線検出器への垂線が撮影システムの回転軸線に交差することによって規定される中心位置にある。
【0028】
本発明の他の実施態様によれば、それぞれ合成される個別投影画像が0%よりも大きく50%よりも小さい、特に10%よりも小さい相互の重なりを有する。0%よりも大きい重なりによって個別投影画像の合成が簡単化される。なぜならば、重複して測定される画像点に基づいて不安定性またはずれの際に調整および平滑化を行なうことができる。同時に50%、特に10%よりも小さい重なりによって、患者が不必要に放射に曝されることが回避される。
【0029】
本発明の他の構成によれば、重なりが対象に依存して、特に対象の大きさに依存して設定される。これによって、対象において利用されないで通り過ぎるX線を対象の高さおよび幅に応じてできるだけ少なくするならば、X線の特に良好な利用率が達成される。
【0030】
異なる曲線点に対する個別投影画像の撮影順序に関しては、またしても2つの有利な実施態様が可能である。撮影順序に関する第1の実施態様によれば、投影画像の撮影順序は、関心領域の周りにおける撮影システムの第1の回転循環において全ての第1の個別投影画像が撮影され、続いて関心領域の周りにおける撮影システムの第2の回転循環において全ての第2の個別投影画像が撮影されるように定められ、各第1の投影画像がそれぞれ1つの第2の投影画像と合成される。
【0031】
撮影順序に関する第2の実施態様によれば、投影画像の撮影順序は、それぞれ1つの拡張2次元投影画像に合成されるそれぞれ少なくとも2つの個別投影画像が関心領域の周りにおける撮影システムの唯一の回転循環においてそれぞれ直接的な続きで撮影されるように定められている。
【0032】
本発明による第1の代替策における方法を実施するのに適したX線装置は、関心領域の2次元投影画像を撮影するためのX線源およびX線検出器を含む撮影システムと、2次元投影画像から3次元画像ボリュームを再構成するための制御および計算ユニットとを備え、撮影システムは、X線源とX線検出器との間における第1の回転中心の周りを回転可能であると共に、X線源の焦点における第2の回転中心を中心にしてまたはX線源の焦点を通る回転軸を中心にして回転可能である。
【0033】
本発明による第2の代替策における方法を実施するために適したX線装置は、関心領域の2次元投影画像を撮影するためのX線源およびX線検出器を含む撮影システムと、関心領域を寝かせるための空間的に3次元移動可能な、特に焦点の周りに回転可能な寝台装置と、2次元投影画像から3次元画像ボリュームを再構成するための制御および計算ユニットとを備え、撮影システムはX線源とX線検出器との間における第1の回転中心の周りを回転可能である。
【0034】
本発明による第3の代替策における方法を実施するために、第2の代替策を実施するためのX線装置と類似のX線装置が適し、この場合には寝台装置が焦点の周りを回転可能であることは必要でなく、撮影システムの回転平面内において2次元に移動可能でなければならない。
【0035】
特に好ましくは、本発明による方法は、撮影システムが直接にまたは支持体を介して産業ロボットもしくは多関節アームロボットに配置されているX線装置、または寝台装置が産業ロボットもしくは多関節アームロボットに配置されているX線装置により実施される。この種のX線装置により空間内における任意の動きが簡単に実行可能である。
【図面の簡単な説明】
【0036】
【図1】従来技術に基づくCアームX線システムの平面図
【図2】患者の遮断された投影のジオメトリ図
【図3】患者の遮断された投影のジオメトリ図
【図4】本発明にしたがって互いに隣接する2つの投影から合成された拡張投影のジオメトリ図
【図5】本発明にしたがって互いに隣接する2つの投影から合成された拡張投影のジオメトリ図
【図6】本発明にしたがって部分的に重ね合わされた2つの投影から合成された拡張投影のジオメトリ図
【図7】本発明にしたがって部分的に重ね合わされた2つの投影から合成された拡張投影のジオメトリ図
【図8】本発明による3次元画像ボリュームの再構成方法を示すブロック図
【図9】円状曲線軌道についての撮影プロトコルの説明図
【図10】円状曲線軌道についての他の撮影プロトコルの説明図
【図11】円状曲線軌道についての別の撮影プロトコルの説明図
【図12】異なる回転角による撮影システムの2つの投影方向を有する軌道曲線の一部を示す説明図
【図13】本発明によるX線システムの概略図
【図14】本発明による他のX線システムの概略図
【図15】第1の位置にある関心領域を有する投影ジオメトリ図
【図16】第2の位置にある関心領域を有する投影ジオメトリ図
【図17】関心領域の異なった回転角とともに撮影システムの2つの投影方向を有する軌道曲線の一部を示す投影ジオメトリ図
【図18】関心領域も撮影システムも移動される場合の投影ジオメトリ図
【図19】関心領域も撮影システムも移動される場合の他の投影ジオメトリ図
【図20】関心領域も撮影システムも移動される場合の2つの回転循環の一部を示す投影ジオメトリ図
【図21】個別投影画像と仮想検出器との関係の説明図
【図22】検出器に基づく仮想検出器の構成原理の説明図
【図23】フィルタラインに基づく仮想検出器の構成原理の説明図
【発明を実施するための形態】
【0037】
以下において、図面に概略的に示された実施例に基づいて本発明および従属請求項の特徴による他の有利な構成を、これらの実施例への本発明の限定が行なわれることなしに詳細に説明する。
【0038】
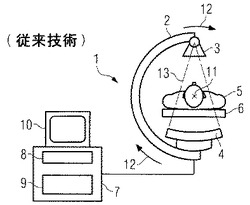
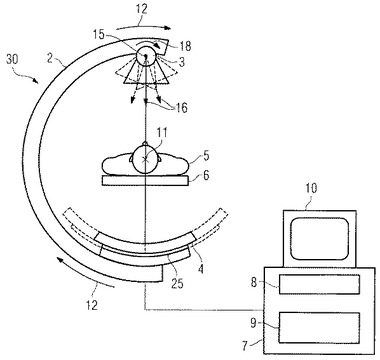
図1には概略的にCアームX線システム1が示されている。X線システム1はCアーム2を有し、Cアーム2には互いに対向してX線源3およびX線検出器4が一般には固定の向きで固定されている。X線検出器4は例えば固体基板上における平坦形または湾曲形X線検出器4である。このようなX線検出器4は、例えば、シンチレータとピクセル素子を持った検出器マトリックスとを有する。X線源3はX線ビーム13を発生する。Cアームは、例えば第1の回転軸線11の周りを矢印方向12に回転させられることによって、患者用寝台6上に存在する関心領域5、例えば患者の周りを回転(傾斜)可能である。撮影システムのそれぞれの投影方向から種々の角度位置について2D投影画像が撮影される。この場合に関心領域5は、中心点が回転軸線11上に位置するように配置されている。
【0039】
このようにして得られた2D投影画像は制御および計算ユニット7に転送される。制御および計算ユニット7は少なくとも1つのデータメモリ8とプロセッサ等を備えた1つの計算モジュール9とを含む。投影画像を3Dボリュームへ再構成することは、制御および計算ユニット7において、例えばフィルタ逆投影による、または逆投影およびフィルタ処理による公知の方法に基づいて行なわれる。撮影された投影画像ならびに場合によっては再構成された画像ボリュームを画面10において観察することができる。
【0040】
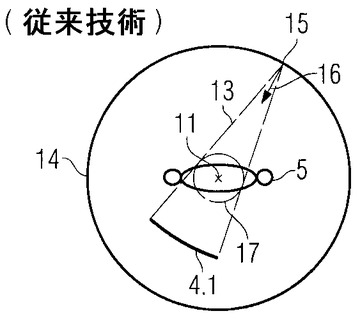
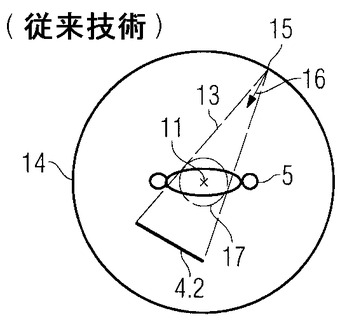
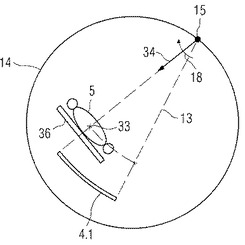
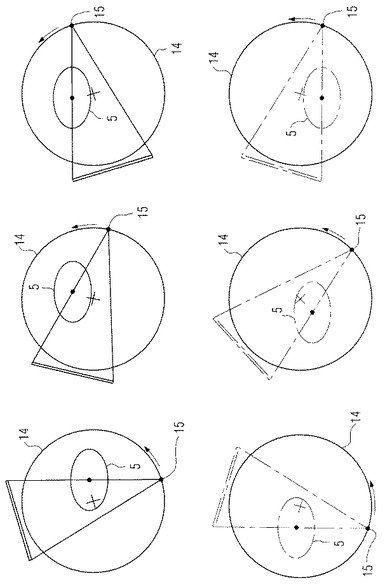
図2および図3は、湾曲形X線検出器4.1および平坦形X線検出器4.2の例でそれぞれ、従来技術に基づく関心領域5の2次元投影画像から3次元画像ボリュームを再構成する方法における関心領域5の遮断された投影の問題を示す。この問題は、遮断されたフィルタラインのために、撮像すべき関心領域5の3Dボリュームをアーチファクトなしに再構成することができないという結果をもたらす。X線ビーム13がX線源3の焦点15から放射方向16に出射して関心領域5を透過し、X線検出器4に入射する。Cアーム2の360°の完全な一回転の際に焦点15の軌跡は軌道曲線14を描く。関心領域5の部分は、軌道曲線14のどの曲線点からもX線ビーム13によって捕捉されるわけではなく、若干の曲線点については遮断される。この場合に、投影中心17は、あらゆる任意の曲線点においてX線ビーム13によって捕捉される範囲を表す。
【0041】
図4ないし図12に基づいて、本発明による方法の第1の代替策を具体的に説明する。この代替策の場合には2つ又はそれ以上の個別の合成された投影画像が走査軌道14上の焦点15の固定位置において撮影される。図13および図14は第1の代替策における方法の実施に適した2つのX線装置を示す。
【0042】
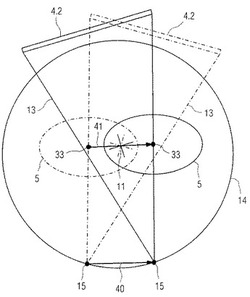
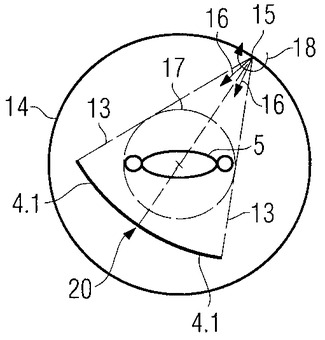
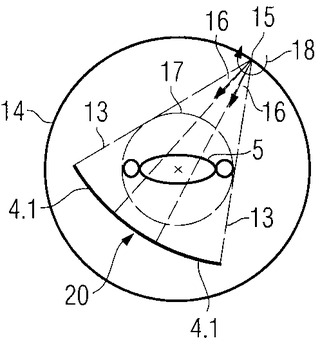
図4ないし図7は、X線源3および特にX線源3の焦点15を中心とする撮影システムの回転角度に関して異なる2つの個別投影画像を、1つの特定曲線点について1つの拡張された投影画像に合成することによって、仮想的に拡張された検出器20を生じる、本発明による方法に使用されるX線検出器の仮想拡張を示す。この場合に、図2および図3と同様に、湾曲形X線検出器4.1の例(図4および図6)および平坦形X線検出器4.2の例(図5および図7)が示されている。それぞれのX線検出器4およびX線源3は互いに固定的に位置合わせされている。
【0043】
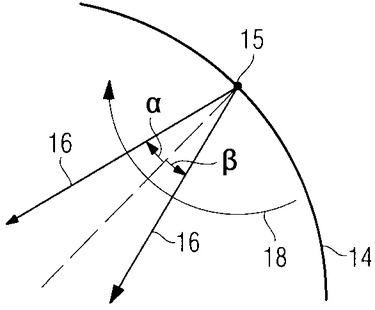
図4は、1つの特定曲線点について、X線源3の焦点15を中心とする撮影システムの回転角度に関して異なる2つの位置で、X線源3および湾曲形X線検出器4.1からなる撮影システムを示す。X線源3の焦点15を中心とする撮影システムの回転は例えば第2の回転方向18に行なわれる。撮影システムのそれぞれの投影方向16が相応の矢印によって示されている。本発明による方法では、撮影システムの両投影方向16のそれぞれについて1つの投影画像が撮影され、引続いて1つの拡張された投影画像(拡張投影画像)に合成される。
【0044】
X線検出器4のこの仮想拡張によって、撮影システムのそれぞれの投影方向16を適切に選定すると、関心領域5は軌道曲線14のどの曲線点からも完全に両X線ビーム13から成る拡張X線ビームにより投影中心17において捕捉可能であるので、遮断された投影はもはや存在しない。2つよりも多い投影画像を1つの拡張投影画像に合成することもできる。
【0045】
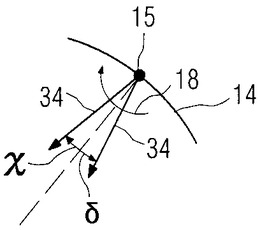
図12は、X線源3の焦点15を中心とする第2の回転方向18への撮影システムの回転と、撮影システムの異なる回転角による、すなわち撮影システムの第1の回転角αおよび撮影システムの第2の回転角βによる撮影システムのそれぞれの投影方向16とを拡大して示す。この場合に、(図12に示されている)中心位置に対して撮影システムの第1の回転角αが負の第2の回転角βに等しいならば、特に有利である。
【0046】
図4は、図6と違って、X線ビーム13が重ならないかまたはほとんど重ならないで、同一平面上で接している、撮影システムの2つの個別の投影方向16のケースを示す。このようなケースにおいては、特に大きな関心領域が撮像可能であり、複数の個々の投影画像(個別投影画像)を1つの拡張投影画像へ合成することが容易になる。図6においては、個々の投影画像が部分的に重なり合うように撮影システムの投影方向16が選定されている。これは、例えば画像処理アルゴリズムによる現実の軌道曲線の較正のために有意義である。重なり範囲は、X線線量を少なくするために、再構成時に適切なコリメーションによって再び零に低減されるとよい。
【0047】
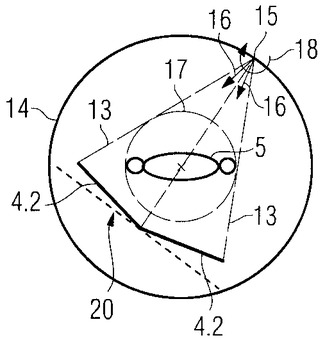
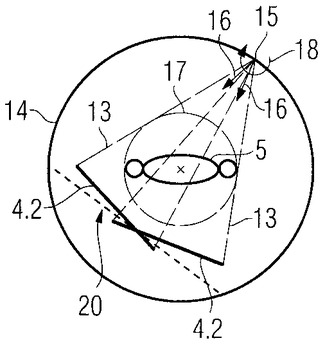
図5および図7は、図4および図6に対応して平坦形X線検出器4.2のケースを示す。このケースでは個別投影画像は補正により合成されなければならない。合成された投影画像において一様な分解能を可能にする湾曲形X線検出器4.1と違って、平坦形X線検出器を使用する場合には、拡張投影画像における分解能が縁部に向かって低下することが考慮されて、評価に取り込まれなければならない。
【0048】
本発明による3次元画像ボリュームの再構成方法では、画像ボリュームのボクセルのグレー値が拡張投影画像の逆投影によって算出される。このために、あらゆる公知の再構成アルゴリズム、例えばフェルドカンプアルゴリズムを使用することができる。拡張投影画像の使用によって、再構成可能な領域を著しく拡張することができるので、大きな身体領域もアーチファクトなしに3次元表示可能である。
【0049】
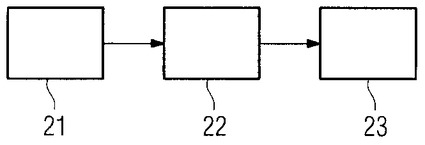
図8は第1のステップ21、第2のステップ22および第3のステップ23からなる本発明による方法を示す。第1の方法ステップ21においては、例えば第1の代替策に基づいて、異なる曲線点ごとにそれぞれ2つの投影画像が撮影されて記憶される。この場合に2つの投影画像はX線源の焦点を中心とする撮影システムの回転角に関して異なっている。第2のステップ22においては、各曲線点について2つの投影画像が1つの拡張投影画像に合成される。これは例えば制御および計算ユニット7において実行される。引続いて第3のステップ23において、拡張された2次元投影画像からの患者の3次元画像ボリュームの再構成が公知の再構成アルゴリズムに基づいて行なわれる。これは同様に制御および計算ユニット7において実行可能である。
【0050】
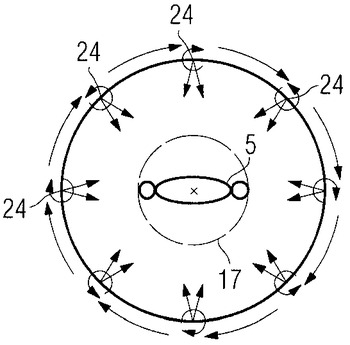
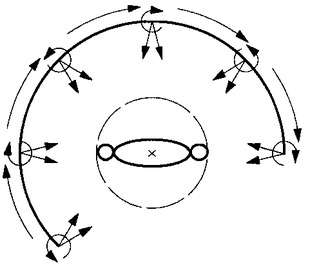
図9乃至図11は異なる2次元投影画像を撮影するための円状曲線軌道についての種々の可能な撮影プロトコルを示す。図9には、撮影システムが関心領域5の周りを360°回転する際に、唯一の回転循環において模範的に8つの曲線点24が相前後して到達され、各曲線点で順番に第1の投影画像および第2の投影画像を撮影する撮影プロトコルが示されている。このために各曲線点においてそれぞれ、X線源の焦点を中心とする撮影システムの回転が必要である。図11は図9と類似の撮影プロトコルを示し、この場合には、(例えば、ショートスキャンまたはスーパーショートスキャンのように)関心領域の周りにおける撮影システムの回転は225°またはそれよりも少ない角度しか行なわれない。部分円を走行することもできることが、(例えば、検出器ずらしのような)他の試みに比べて、本発明による方法の有利性を際立たせる。
【0051】
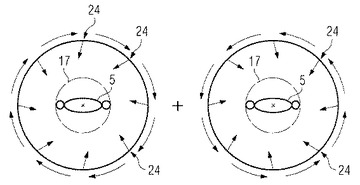
図10においては、撮影システムが関心領域5の周りを360°回転する際に模範的に8つの曲線点24が第1の回転循環にて相次いで到達され、各曲線点で第1の投影画像が撮影される。引続いてX線源の焦点を中心として撮影システムが回転し、そして全ての曲線点24が第2の回転循環にて逆の順序で相次いで到達され、各曲線点で第2の投影画像が撮影される。この原理は(例えばスパイラル、円および線、円および円弧のような)他の軌道曲線に有利に転用することができる。
【0052】
対象に依存した重なりは、例えば、関心領域の寸法が少なくともほぼ既知である場合に調整することができる。例えば、僅かのX線線量による1つ又は複数の予備撮影によって関心領域の寸法を決定し、引続いて重なりを手動または自動で調整することができる。投影の重なり範囲においては測定データが平均化され、このことは測定値の標準偏差の低減つまりノイズ低減を生じる。
【0053】
図13は本発明の実施例として他のCアームX線装置30を示す。このCアームX線装置30は、従来技術によるX線装置1とは、関心領域5の周りにおけるCアーム2の回転のほかにX線源3およびX線検出器4からなる撮影システムが共通に放射源3の焦点15における第2の回転中心を中心にして回転可能である点で相違する。特に、撮影システムはCアーム2の回転平面内で回転可能である。
【0054】
図13は、休止位置のほかに、撮影システムがCアーム平面においてX線源3の焦点を中心としてそれぞれある角度(>0)だけ回転させられている他の2つの位置を破線で示す。制御および計算ユニット7はその回転の制御に使用することができる。X線源3は例えば傾斜可能に取り付けられている。X線検出器4はレール25上にこのレールに沿って移動可能であるように取り付けられている。撮影システムは、本発明による方法の効果的な利用のために、X線源3を中心にして両方向に少なくとも5°回転可能であるべきである。この種のシステムにおいて、X線源およびX線検出器が互いに一定の距離および同じままに保たれる方位を有するように考慮されなければならない。本発明の他の実施形態によれば、撮影システムが放射源、特に放射源の焦点における第2の回転中心を中心にして回転可能であるコンピュータ断層撮影X線装置が設けられている。
【0055】
本発明による方法は、例えばCアームX線装置によって発生されるコーンビーム形状のX線ビームに対しても、コンピュータ断層撮影X線装置によって発生されるファンビーム形状のX線ビームに対しても有利に使用可能である。
【0056】
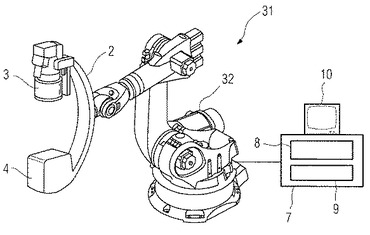
図14は本発明の実施形態としてロボット式X線装置31を示す。このロボット型X線装置においては、撮影システムを支持するCアーム2がいわゆる多関節アームロボット32に配置されている。例えば自動車の工業生産において標準的に使用されるこのような多関節アームロボット32は、例えば6つの回転軸を有し、それによって空間内でのあらゆる任意の動きが可能である。制御および計算ユニット7は、またしてもX線源3の焦点15を中心とする撮影システムの回転の制御に使用される。例えば操作者によって関心領域の高さおよび幅が制御および計算ユニット7に伝達され、制御および計算ユニット7が関心領域の完全な撮像に必要な回転角を算出する。引続いて制御および計算ユニット7が多関節アームロボット32およびCアーム2のひき続く動きを制御する。
【0057】
ロボット式X線装置31により、Cアーム2の回転平面における回転角だけでなく、例えばその回転平面に対して垂直な平面における回転角またはX線検出器上の中心位置へのX線源の垂線と交差する他の平面における回転角が、関心領域のどの部分を撮影すべきかに応じて可能である。一般に、引続いて合成される少なくとも2つの個別投影の回転角が一平面内にあることが好ましい。
【0058】
本発明による方法の第2の代替策において、それぞれ少なくとも2つの個別投影画像は、焦点15および撮影システムが位置固定である際に関心領域5が焦点15の周りにまたは焦点15を通る回転軸の周りに回転する回転角に関して異なる。したがって、第1の代替策におけると同様に、焦点15の各曲線点において2つの(または2つよりも多い)個別投影画像が撮影され、引続いて1つの拡張投影画像に合成される。異なる個別投影画像のために、関心領域5がX線源3の焦点15の周りを回転させられる。その際に焦点15に対する関心領域5の相対的位置は同じままである。
【0059】
図15は第1の個別投影画像が撮影される関心領域5の第1の位置を示し、図16は第2の個別投影画像が撮影される関心領域5の第2の位置を示す。それぞれの回転角は、焦点15の周りに関心領域5が回転させられる場合に、焦点15から関心領域5の中心点33への投影方向34に関係する。回転角零点として、例えばX線検出器4への焦点15の垂線が使用されるとよい。
【0060】
図17は、焦点15から関心領域5の中心点33への両投影方向34を模範的に示し、例えば関心領域5の第1の位置において関心領域5の第1の回転角χが生じ、関心領域5の第2の位置において関心領域5の第2の回転角δが生じる。引続いて投影画像が合成され、通常のように再構成される。
【0061】
焦点の周りにおける関心領域5の回転移動は、空間内で任意に移動可能な寝台装置、例えば移動可能な患者用テーブル36によって実行される。空間内において、つまり6つの自由度をもって移動可能な患者用テーブル36の移動は、例えば特に、移動可能な患者用テーブルが配置されている6軸の多関節アームロボットによって行なわれる。患者が移動可能な患者用テーブル36上にしっかり固定されるように考慮すべきである。なぜならば、患者用テーブル36が回転するからである。
【0062】
本発明による方法のこの代替策の場合にも、1つの回転循環内において到達された各曲線点で、交互に2つの個別投影画像が、その間に焦点15の周りで行なわれる関心領域5の回転をともなって撮影されるか、又は、先ず1つの回転循環において全ての曲線点についてそれぞれ第1の投影画像が撮影され、引続いて回転後に第2の回転循環において全ての曲線点についてそれぞれ第2の投影画像が撮影される。更に、この場合にも個別投影画像の部分的な重なりを設けてもよい。
【0063】
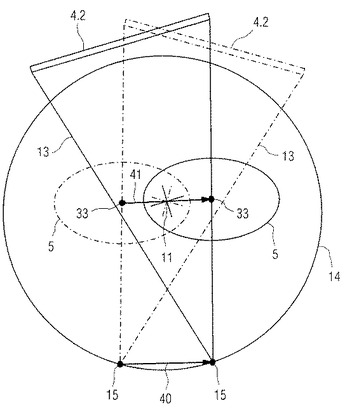
本発明の第3の代替策では、第1の個別投影画像における関心領域5も撮影システムも第2の個別投影画像に比べて異なる位置を持つが、焦点15と関心領域5との間の相対的位置は一定である。焦点15は、走査軌道上における両位置にあって、もちろん同一の個所になく、焦点15の両位置間の接続区間40は関心領域5の中心点33の両位置間の接続区間41に対して平行でありかつ同じ長さを有する。したがって、2つよりも多い投影画像が合成される場合には、相応のことが他の個別投影画像について当てはまる。
【0064】
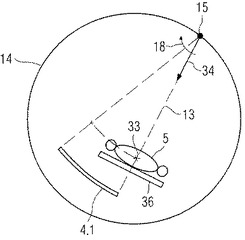
図18は、焦点15と模範的に平坦形X線検出器4.2とによって表示された撮影システムならびに関心領域5を、第1の個別投影画像が撮影される第1の位置(実線)および第2の個別投影画像が撮影される第2の位置(鎖線)に示す。第1の個別投影画像および第2の個別投影画像が引続いて1つの拡張投影画像に合成され、他の拡張投影画像と共に通常のように再構成される。
【0065】
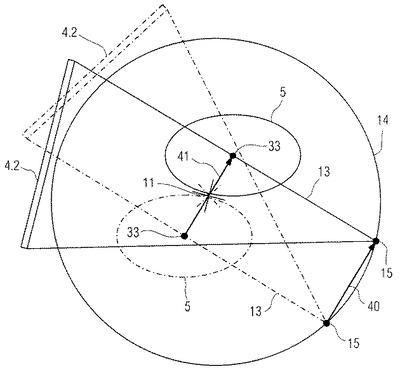
焦点15と関心領域5との間の相対的位置は両位置において同じであり、これは、関心領域5内の任意に選択された2つの固定点と焦点15とによって設定される3角形が第1の位置(第1の個別投影画像)および第2の位置(第2の個別投影画像)において同じ大きさを有することを意味する。更に、第1の位置と第2の位置との間の幾何学的関係は次のとおりである。第1の位置の関心領域5が第2の関心領域5と一致させられたとするならば、焦点15を中心とする撮影システムの回転から第2の位置における撮影システムが生じる。図19は、同様に、第1の個別投影画像を撮影するための第1の位置(実線)および第2の個別投影画像を撮影するための第2の位置(鎖線)を示し、第1の投影画像および第2の投影画像は引続いて合成可能である。
【0066】
第3の代替策は、第1の代替策に比べて、回転軸11の周りにだけ回転可能である従来のCアームX線装置によっても実施可能であるという利点を有し、しかし付加的に位置調整可能な患者用テーブルが存在する。第3の代替策は、第2の代替策に比べて、関心領域5を受入れる患者用テーブルがCアーム平面内だけで2次元に移動可能であればよく、傾斜させられる必要がなく、それによって患者の支え(横たえ)が明らかに簡単化されているという利点を有する。
【0067】
図20は、2つの回転循環からの部分を3つずつ示し、この場合に投影画像の撮影順序は次のとおりである。すなわち、先ず、関心領域の周りにおける撮影システムの第1の回転循環(実線、図の上側)の際に第1の個別投影画像の全てが撮影され、引続いて関心領域の周りにおける撮影システムの第2の回転循環(鎖線、図の下側)の際に第2の個別投影画像の全てが撮影される。撮影に引続いて、各第1の投影画像とそれぞれに対応する第2の投影画像とが合成される。回転循環は360°以下であってよい。
【0068】
投影画像の撮影順序は次のとおりであってもよい。すなわち、それぞれ1つの拡張2次元投影画像に合成されるそれぞれ少なくとも2つの個別投影画像が、関心領域の周りにおける撮影システムの唯一の回転循環においてそれぞれ直接的な続きで撮影される。
【0069】
本発明の第2および第3の代替策においても、合成すべき個別投影画像が部分的に重ねられてもよいし、同一平面上で互いに接していてもよい。
【0070】
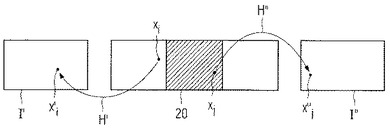
少なくとも2つの投影画像を1つの拡張投影画像に合成するためには、いわゆる仮想検出器を構成することが好ましく、仮想検出器は付加的に撮影システムおよび対象の空間的な位置および配置を記述する。仮想検出器の構築のために2つの方法が使用される。第1の方法は検出器に基づいて、つまりX線検出器の検出器マトリックスのデカルト座標配置を基礎として実施され、第2の方法はフィルタラインに基づいて、つまりフィルタラインの配置を基礎として実施される。
【0071】
図21に示されているように、仮想検出器20における、つまり合成された拡張投影画像における点xi,xjと、第1の個別投影画像I'および第2の個別投影画像I"における点xi',xj"との間において、ホモグラフィH',H"、すなわち第1の個別投影画像I'に関連づけられた第1のホモグラフィH'および第2の個別投影画像I"に関連づけられた第2のホモグラフィH"によって、次の関係が定義される。
(a)xi'=H' xi
(b)xj"=H" xj
【0072】
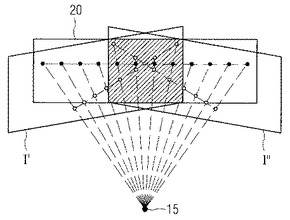
検出器におけるラインいわゆるフィルタラインに沿ってFBPアルゴリズムにおいて実行すべきフィルタ処理に関しては、特に新しい再構成方法が傾斜したフィルタラインを規定することから、フィルタラインの配置(フィルタライン方式)に基づいて、かつ検出器マトリックスのデカルト配置(検出器方式)に基づかないで、仮想検出器を構築することが有意義である(図23)。
【0073】
仮想検出器のフィルタラインに基づく構成は、フィルタラインに沿った値が方程式(a),(b)により第1の個別投影画像I'および第2の個別投影画像I"から直接に算出可能であり、それによって仮想検出器20からのこれらの値の後の補間が回避されるという利点を有する。
【0074】
フィルタライン方式は、検出器方式と違って、もはや再構成の独立したステップとして理解することができない。なぜならば、フィルタラインの位置が加えられなければならず、フィルタラインの位置が再構成アルゴリズムに依存するからである。しかしながら、再構成のフィルタラインに基づく試みは、傾斜したフィルタラインの場合に補間時の個数を減らし、多くの場合に再構成時に計算時間に関しても達成可能な位置分解能に関しても検出器方式よりも好まれる。FDKアルゴリズムにおいては、フィルタライン方式および検出器方式が同じ意味を持つ。なぜならば、この場合には検出器列がフィルタラインと一致するからである。したがって、検出器に基づく試みは、フィルタラインに基づく試みの特殊事例、すなわちフィルタラインが検出器ラスタ上にある特殊事例とみなすことができる。
【0075】
第1のホモグラフィH'および第2のホモグラフィH"は、第1の投影画像I'と仮想検出器20との間ならびに第2の投影画像I"と仮想検出器20との間の図21に示された幾何学的関係を規定する。ホモグラフィH',H"により、第1の投影画像I'の点xi''および第2の投影画像I"の点xj"の位置における必要なグレー値が個別投影画像I',I"から取り出される。点xi',xj"の撮像(写像)xi,xjは、一般にもはや検出器ラスタ上になく、そのためにこれらの位置におけるグレー値は存在する隣接値からの補間、例えばバイリニア補間によって求められる。個別投影画像I',I"の重なり範囲は仮想検出器20においてハッチングで強調されている。
【0076】
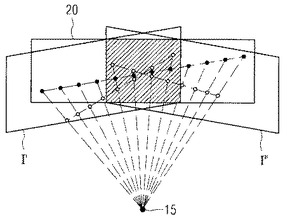
図22は任意の検出器列の例における検出器に基づく試みを示し、図23は任意のフィルタラインに基づく試みを示す。黒く塗りつぶされた点は、それぞれ個別投影画像I'およびI"のグレー値からの補間によってグレー値が決定された仮想検出器20上の位置を示す。中空の点はそれぞれ個別投影画像上の位置を示す。第1の投影画像I'と第2の投影画像I"との重なり範囲(ハッチング範囲)においては適切な補間方法が適用されるべきである。なぜならばこの場合には両個別投影画像からのグレー値が存在するからである。
【0077】
破線による点の象徴的な接続は、ホモグラフィH',H"がライン上に再びラインを写像することを具体的に示す(もちろん、点(およびそれにともなう走査)の間隔がラインに沿って変化する。)。同様に、検出器に基づく試みがフィルタラインに基づく試みの特殊事例であること、すなわち水平ラインに沿ったフィルタ処理が行なわれる場合の特殊事例であることが明らかである。
【0078】
本発明は、次のように要約される。大きな関心領域の場合および360°を下回る走査軌道の場合にもアーチファクトのない再構成を可能にするために、焦点を有するX線源と検出器とを備えた撮影システムが関心領域の周りを回転する間に撮影された関心領域の複数の2次元投影画像から3次元画像ボリュームを、画像ボリュームのボクセルのグレー値を投影画像の逆投影により算出することによって再構成する方法において、各2次元投影画像がそれぞれ少なくとも2つの個別投影画像から1つの拡張された2次元投影画像に合成され、それぞれ少なくとも2つの個別投影画像が焦点と関心領域との間の一定の相対的位置において撮影される。
【符号の説明】
【0079】
1 CアームX線システム
2 Cアーム
3 X線源
4 X線検出器
4.1 湾曲形X線検出器
4.2 平坦形X線検出器
5 関心領域
6 患者用寝台
7 制御および計算ユニット
8 データメモリ
9 計算モジュール
10 画面
11 回転軸線
12 回転方向
13 X線ビーム
14 軌道曲線
15 焦点
16 放射方向(投影方向)
17 投影中心
18 回転方向
20 仮想検出器
21 第1のステップ
22 第2のステップ
23 第3のステップ
24 曲線点
25 レール
30 CアームX線装置
31 ロボット式X線装置
32 多関節アームロボット
33 関心領域の中心点
34 投影方向
36 移動可能な患者用テーブル
40 焦点の両位置間の接続区間
41 関心領域の中心点の両位置間の接続区間
α 第1の回転角
β 第2の回転角
χ 第1の回転角
δ 第2の回転角
H' 第1のホモグラフィ
H" 第2のホモグラフィ
I' 第1の投影画像
I" 第2の投影画像
xi 拡張投影画像における点
xj 拡張投影画像における点
xi' 第1の個別投影画像I'における点
xj" 第2の個別投影画像I"における点
【技術分野】
【0001】
本発明は、焦点を有するX線源と検出器とを備えた撮影システムが関心領域の周りを回転する間に撮影された関心領域の複数の2次元投影画像から3次元画像ボリュームを、画像ボリュームのボクセルのグレー値を投影画像の逆投影により算出することによって再構成する3次元画像ボリュームの再構成方法、ならびにこの種の方法を実施するためのX線装置に関する。
【背景技術】
【0002】
今日におけるCアーム装置による3次元コーンビーム再構成の場合に、撮影ジオメトリ(検出器寸法および焦点距離)によって規定される最大幅を上回る特定身体部位(例えば腹部または胸部)において、いわゆる広幅対象(ワイドオブジェクト)の問題が発生する。フィルタ逆投影による3D再構成のために重要な処理ステップは、検出器において水平に、またはほぼ水平に延びるラインに沿った投影データのフィルタ処理である。
【0003】
(例えばランプフィルタまたはヒルベルトフィルタのように)フィルタ核の非局所的な性質に基づいて、たとえ関心領域(Region of Interest,ROI)の一部分のみが再構成されるべきであっても、フィルタラインは検査範囲の全ての投影を通り抜けなければならず、遮断されてはならない。しかしながら、多くの撮影において、限られた検出器幅が関心領域のトランスアキシャルに遮断された投影をもたらす。なぜならば、関心領域を撮像視野(Field of View,FoV)によって完全に網羅することができないからである。これは、これらの投影において遮断されたフィルタラインをもたらす。その結果、強い再構成アーチファクト、例えばいわゆるトランケーションアーチファクトが生じる。これらのアーチファクトは結果を歪曲し、専門的な診断を妨害し、困難にし、あるいは不可能にする。
【0004】
いわゆる広幅対象の問題は、今日におけるフィルタ逆投影に基づいて動作する再構成アルゴリズム(FBPアルゴリズム)のほとんど全てに、すなわち大多数に関係する。これは、特に焦点の円状走査軌道のために設計されている公知のフェルドカンプアルゴリズム(例えば、非特許文献1参照)に対して当てはまる。最近の正確な再構成方法(例えば、非特許文献2および非特許文献3参照)は、走査のために拡張された軌道曲線(例えば、円および線、円および円弧)を要求するが、この問題も有する。したがって、広幅対象の問題に耐え得る解決策は、コンピュータ断層撮影における再構成問題の解決のための重要かつ主要な役割であった。
【0005】
対象空間におけるフィルタ処理を逆投影後にはじめて実行しかつ投影データに対する局所的な計算ステップのみを許容する逆投影フィルタ処理(BPF)法は、遮断された投影をある程度まで迂回することができる。これは、スパイラル状の軌道曲線の例(例えば、非特許文献4および非特許文献5参照)および円状の軌道曲線の例(例えば、非特許文献6参照)で具体的に説明されている。BPFの試みは、幾つかの事例において、遮断された投影の問題を解決し、検査範囲内の関心領域(ROI)のアーチファクトのない再構成を可能にする。
【0006】
更に、BPFの試みから導き出された類似の特性を有するFBP法が公知である(例えば、非特許文献7参照)。しかしながら、関心領域が撮像視野(FoV)に制限されているので、この方法によってもしばしば完全な関心領域(例えば大きな患者の腹部)を再構成することができない。
【0007】
しかし、撮像視野(FoV)を拡張する方法も公知である。ここでは、検出器が光軸に関して対称でなくてある程度のずれをもって配置されている検出器ずらし法を例として挙げる(例えば、非特許文献8参照)。もちろん、検出器ずらし法は、少なくとも360°の角度範囲にわたる走査のための円状またはスパイラル状の軌道曲線を要求する。更に、この方法はコーンビームジオメトリにおいて近似的な撮像領域(FoV)拡張を具現し、したがって大きなコーン角においてアーチファクトをもたらす。
【0008】
類似の試みは遮断された投影データの見積もり法(外挿法)である。この方法では、欠けている線積分が、(例えば、コーン角が無視された状態で対向ビームの擬似冗長性のように)近似的な仮定に基づいて補足される(例えば、非特許文献9参照)。この方法の場合にも、360°の走査のための軌道曲線が必要である。特に、最後の方法はFDKアルゴリズムの拡張として理解される。
【先行技術文献】
【非特許文献】
【0009】
【非特許文献1】L.A.Feldkamp,L.C.Davis,J.W.Kress:"Practical Cone−Beam Algorithm",J.Opt.Soc.Am.A,Vol.1,No.6,pp.612−619
【非特許文献2】A.Katsevich:"Image Reconstraction for the Circle and Arc Trajectory",Physics in Medicine and Biology,Vol.50,pp.2249−2265,April 2005
【非特許文献3】J.Pack,F.Noo:"Cone−Beam Reconstruction Using 1D Filtering Along the Projection of M−Lines",Inverse Problems,Vol.21,pp.1105−1120,April 2005
【非特許文献4】J.Pack,F.Noo,R.Clackdoyle:"Cone−Beam Reconstruction Using the Backprojection of Locally Filtered Projections",IEEETransactions on Medical Imaging,Vol.24,No.1,pp.70−85,January 2005
【非特許文献5】E.Y.Sidky,Y.Zou,X.Pan:"Minimum Data Image Reconstruction Algorithrns with Shift−Invariant Filtering for Helical,Cone−Beam CT"、Physics in Medicine and Biology,Vol.50,pp.1643−1657,2005
【非特許文献6】L.Yu,D.Xia,Y.Zou,X.Pan,C.Pelizzari,P.Munro:"Region of Interest Reconstruction from Truncated Data in Circular Cone−Beam CT",Proceedings of the SPIE,Vol.5747,pp.412−418,2005
【非特許文献7】E.Y.Sidky,Y.Zou,X.Pan:"A Minimum Data FBP−Type Algorithm for Image Reconstruction in Cone−Beam CT",Eighth International Meeting on Fully Three−Dimensional Image Reconstruction in Radiology and Nuclear Medicine,Salt Lake City,Utah,6−9 July,2005
【非特許文献8】V.Liu,N.R.Lariviere,G.Wang:"X−Ray Micro−CT with a Displaced Detector Array:Application to helical cone−beam reconstruction",Medical Physics,Vol.30,No.10,pp.2758−2761,October 2003
【非特許文献9】P.S.Cho,A.D.Rudd,R.H.Johnson:"Cone−Beam CT from Width−Truncated Projections",Computerized Medical Imaging and Graphics,Vol.20,No.1,pp.49−57,1996
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明の課題は、大きな関心領域の場合にもかつ360°を下回る走査軌道の場合にもアーチファクトのない再構成を可能にする関心領域の2次元投影画像から3次元画像ボリュームの再構成方法を提供することにある。更に、本発明の課題はこの方法の実施に適したX線装置を提供することにある。
【課題を解決するための手段】
【0011】
3次元画像ボリュームの再構成方に関する課題は、本発明によれば、焦点を有するX線源と検出器とを備えた撮影システムが関心領域の周りを回転する間に撮影された関心領域の複数の2次元投影画像から3次元画像ボリュームを、画像ボリュームのボクセルのグレー値を投影画像の逆投影により算出することによって再構成する3次元画像ボリュームの再構成方法であって、各2次元投影画像がそれぞれ少なくとも2つの個別投影画像から1つの拡張された2次元投影画像に合成され、それぞれ少なくとも2つの個別投影画像が焦点と関心領域との間の一定の相対的位置において撮影される3次元画像ボリュームの再構成方法において、それぞれ少なくとも2つの個別投影画像は、焦点および関心領域が一定の相対的位置にて互いに異なって位置決めされかつ撮影システムが焦点を中心にしてまたは焦点を通る回転軸線を中心にして異なって回転させられるように異なっていることにおよって解決される(請求項1)。
X線装置に関する課題は、本発明によれば、関心領域の2次元投影画像を撮影するためのX線源およびX線検出器を含む撮影システムと、2次元投影画像から3次元画像ボリュームを再構成するための制御および計算ユニットとを備え、撮影システムは、X線源とX線検出器との間における第1の回転中心の周りを回転可能であると共に、X線源の焦点における第2の回転中心を中心にしてまたはX線源の焦点を通る回転軸線を中心にして回転可能であることによって解決される(請求項15)。
【0012】
3次元画像ボリュームの再構成方法に関する本発明の有利な実施態様は次の通りである。
・それぞれ2つの個別投影画像が作成されて1つの拡張された投影画像に合成される(請求項2)。
・少なくとも2つの個別投影画像のそれぞれの回転角が一平面内に配置されている(請求項3)。
・焦点を中心とする撮影システムまたは関心領域のそれぞれの回転は、関心領域の周りにおける撮影システムの回転平面内にある(請求項4)。
・第1の個別投影画像は焦点を中心とするまたは焦点を通る回転軸線を中心とする撮影システムの第1の回転角において撮影され、第2の個別投影画像は焦点を中心とするまたは焦点を通る回転軸線を中心とする撮影システムの第2の回転角において撮影され、第1の回転角が負の第2の回転角に一致する(請求項5)。
・それぞれ合成される個別投影画像が0%よりも大きく50%よりも小さい相互の重なりを有する(請求項6)。
・それぞれ合成される個別投影画像が0%よりも大きく10%よりも小さい相互の重なりを有する(請求項7)。
・重なりが対象に依存して、特に対象の大きさに依存して設定される(請求項8)。
・投影画像の撮影順序は、先ず関心領域の周りにおける撮影システムの第1の回転循環において全ての第1の個別投影画像が撮影され、続いて関心領域の周りにおける撮影システムの第2の回転循環において全ての第2の個別投影画像が撮影されるように定められ、各第1の投影画像がそれぞれ1つの第2の投影画像と合成される(請求項9)。
・投影画像の撮影順序は、それぞれ1つの拡張2次元投影画像に合成されるそれぞれ少なくとも2つの個別投影画像が関心領域の周りにおける撮影システムの唯一の回転循環においてそれぞれ直接的な続きで撮影されるように定められている(請求項10)。
・投影画像を撮影するためにX線源から発生されるX線ビームがコーンビームの形状を有する(請求項11)。
・投影画像を撮影するためにX線源から発生されるX線ビームがファンビームの形状を有する(請求項12)。
・仮想検出器がX線検出器の検出器マトリックスのデカルト座標配置に基づいて構成されることによって、少なくとも2つの個別投影画像が合成される(請求項13)。
・仮想検出器がフィルタラインの配置に基づいて構成されることによって、少なくとも2つの個別投影画像が合成される(請求項14)。
【0013】
本発明による方法では、1つの拡張投影画像に合成される2つの(またはそれよりも多い)異なる個別投影画像を作成することによって、限られた検出器面、従って限られた視野(FoV)を拡張することができる。それによって関心領域(ROI)全体が表示可能である。
【0014】
それぞれ少なくとも2つの個別投影画像は、焦点と関心領域との間の一定の相対的位置において撮影される。この場合に一定の相対的位置とは、関心領域における2つの点と焦点とによって規定される三角形が一定の大きさを有することであると理解すべきである。
【0015】
更に、それぞれ少なくとも2つの個別の投影画像は、少なくとも2つの個別投影画像の照射のためのそれぞれのX線ビームが、連続して関心領域を網羅する拡張されたX線ビームに合成可能であるように選ばれている。
【0016】
本発明の第1の実施態様によれば、それぞれ少なくとも2つの個別投影画像は、焦点および関心領域が位置固定である際に撮影システムが焦点を中心にしてまたは焦点を通る回転軸線を中心にして回転する回転角に関して異なっている。2次元投影画像を撮影するための撮影システムが一般に関心領域内に置かれる第1の回転中心の周りを回転し、このようにして焦点の異なる曲線点について投影画像が作成されると共に、X線源に、特にX線源の焦点に第2の回転中心が存在し、それゆえ各曲線点について少なくとも2つの個別投影画像が撮影可能である。
【0017】
それによって、簡単かつ安価に、走査軌道曲線の全ての曲線点から2次元投影画像にて撮像(写像)可能でありかつアーチファクトなしに3次元に再構成可能である領域が拡張される。この場合に走査軌道曲線または軌跡はX線焦点の軌道によって規定される。
【0018】
軌跡の各曲線点において2つの(または2つよりも多い)個別投影画像が作成される。個々の撮影間の相違は、撮影システムがX線源を中心にして、特にX線源の焦点を中心にして異なる回転角を取ることにある。したがって、X線源とX線検出器とからなる撮影システムのX線源を中心とする回転が、X線からの付加的な画像情報の獲得を可能にする。
【0019】
それによって、個別投影画像間に、個別投影画像を補正により1つの大きな拡張された投影画像に合成するために利用することができるホモグラフィ関係が生じる。これはファンビームジオメトリにもコーンジオメトリにも当てはまる。このようにして検出器が仮想的に拡張され、部分的には本来の幅の何倍にも拡張される。このように拡大されたFoVによって当該身体領域が完全に捕捉可能になる。
【0020】
この場合にホモグラフィ(homography)は、点が或る2D座標系から他の2D座標系へ移される写像規則である。2つ又はそれ以上の平面に1つのX線ビームが交差する場合に、異なる平面の対応する交点の間にホモグラフィ関係が存在する。点が均一な座標において表されるならば、この関係は線形写像x'=H'xとして公式化することができる。ただし、xは元の点を示し、x'は変換された点を示し、3×3のマトリックスH'はホモグラフィ変換自体を示す。この場合に少なくとも2つの個別投影画像の合成は、実際のX線検出器に対して拡張された仮想検出器の構築とも呼ばれる。これは、本発明のどの代替策に基づいて2つ又はそれ以上の個別投影画像が撮影されたかには関係なく、当てはまる。
【0021】
本発明の第2の代替策によれば、それぞれ少なくとも2つの個別投影画像は、焦点および撮影システムが位置固定である際に関心領域が焦点の周りをまたは焦点を通る回転軸線の周りを回転する回転角に関して異なっている。
【0022】
本発明の第3の代替策によれば、それぞれ少なくとも2つの個別投影画像は、焦点および関心領域が一定の相対的位置にて互いに異なって位置決めされ撮影システムが焦点または焦点を通る回転軸線を中心にして回転させられる。
【0023】
本発明による方法もしくは本発明による方法の選択的な形態は、一方では、限られた検出器面積のために従来可能でなかった腹部や胸部のような大きな身体領域のアーチファクトのない完全な再構成を可能にする。他方では、身体領域全体の一部しか再構成されない関心領域再構成の際に、遮断された投影画像が厄介な再構成アーチファクトを生じることを回避することができる。その上、本発明による方法は、遮断された投影画像がアーチファクトをひき起こすあらゆる再構成アルゴリズムと効果的に組み合わせ可能であり、これは拡張として理解されるべきである。これは、特に、今日のCアーム装置において標準的に使用されるフェルドカンプ、デービスおよびクレスのアルゴリズムに対して当てはまる。なぜならば、これは円状走査軌道(軌跡)において水平なフィルタラインを有するからである。
【0024】
本発明による方法と公知の(近似的または正確な)再構成アルゴリズムとの組み合わせにおける重要な利点は、これらの公知の再構成アルゴリズムの変更の必要性がないことにある。仮想検出器は前処理ステップとして構成されるとよい。すなわち、再構成に使用された拡張投影画像が本来の再構成の前に2つ又はそれ以上の個別投影画像から合成され、引続いて再構成に使用される。撮影プロトコル、すなわち個別投影画像の撮影順序だけを相応に変更することができる。更に、本発明による方法は平坦形ならびに湾曲形の検出器に適し、ファンビームジオメトリにもコーンジオメトリにも適用可能である。
【0025】
安価な方法のために有利には、それぞれ正確に2つの個別値画像が作成されて1つの拡張投影画像に合成される。
【0026】
本発明の一実施態様によれば、少なくとも2つの個別投影画像のそれぞれの回転角が一平面内に配置されている。これによって、拡張投影画像への投影画像の合成の簡単化が保証される。
【0027】
少なくとも2つの個別投影画像の簡単な合成のために有利には、焦点を中心とするまたは焦点を通る回転軸線を中心とする撮影システムまたは関心領域の回転は、ほぼ関心領域の周りにおける撮影システムの回転平面内にあり、これは関心領域の周りにおける撮影システムの回転平面に対して直交して焦点を通る回転軸線を中心とする回転(傾斜)と同じ意味を持つ。この場合に、第1の個別投影画像は焦点を中心とするまたは焦点を通る回転軸線を中心とする撮影システムの第1の回転角において撮影され、第2の個別投影画像は焦点を中心とするまたは焦点を通る回転軸線を中心とする撮影システムの第2の回転角において撮影され、第1の回転角が負の第2の回転角に一致するならば、特に有利であることが分かった。この場合に基準点は、X線源の焦点からX線検出器への垂線が撮影システムの回転軸線に交差することによって規定される中心位置にある。
【0028】
本発明の他の実施態様によれば、それぞれ合成される個別投影画像が0%よりも大きく50%よりも小さい、特に10%よりも小さい相互の重なりを有する。0%よりも大きい重なりによって個別投影画像の合成が簡単化される。なぜならば、重複して測定される画像点に基づいて不安定性またはずれの際に調整および平滑化を行なうことができる。同時に50%、特に10%よりも小さい重なりによって、患者が不必要に放射に曝されることが回避される。
【0029】
本発明の他の構成によれば、重なりが対象に依存して、特に対象の大きさに依存して設定される。これによって、対象において利用されないで通り過ぎるX線を対象の高さおよび幅に応じてできるだけ少なくするならば、X線の特に良好な利用率が達成される。
【0030】
異なる曲線点に対する個別投影画像の撮影順序に関しては、またしても2つの有利な実施態様が可能である。撮影順序に関する第1の実施態様によれば、投影画像の撮影順序は、関心領域の周りにおける撮影システムの第1の回転循環において全ての第1の個別投影画像が撮影され、続いて関心領域の周りにおける撮影システムの第2の回転循環において全ての第2の個別投影画像が撮影されるように定められ、各第1の投影画像がそれぞれ1つの第2の投影画像と合成される。
【0031】
撮影順序に関する第2の実施態様によれば、投影画像の撮影順序は、それぞれ1つの拡張2次元投影画像に合成されるそれぞれ少なくとも2つの個別投影画像が関心領域の周りにおける撮影システムの唯一の回転循環においてそれぞれ直接的な続きで撮影されるように定められている。
【0032】
本発明による第1の代替策における方法を実施するのに適したX線装置は、関心領域の2次元投影画像を撮影するためのX線源およびX線検出器を含む撮影システムと、2次元投影画像から3次元画像ボリュームを再構成するための制御および計算ユニットとを備え、撮影システムは、X線源とX線検出器との間における第1の回転中心の周りを回転可能であると共に、X線源の焦点における第2の回転中心を中心にしてまたはX線源の焦点を通る回転軸を中心にして回転可能である。
【0033】
本発明による第2の代替策における方法を実施するために適したX線装置は、関心領域の2次元投影画像を撮影するためのX線源およびX線検出器を含む撮影システムと、関心領域を寝かせるための空間的に3次元移動可能な、特に焦点の周りに回転可能な寝台装置と、2次元投影画像から3次元画像ボリュームを再構成するための制御および計算ユニットとを備え、撮影システムはX線源とX線検出器との間における第1の回転中心の周りを回転可能である。
【0034】
本発明による第3の代替策における方法を実施するために、第2の代替策を実施するためのX線装置と類似のX線装置が適し、この場合には寝台装置が焦点の周りを回転可能であることは必要でなく、撮影システムの回転平面内において2次元に移動可能でなければならない。
【0035】
特に好ましくは、本発明による方法は、撮影システムが直接にまたは支持体を介して産業ロボットもしくは多関節アームロボットに配置されているX線装置、または寝台装置が産業ロボットもしくは多関節アームロボットに配置されているX線装置により実施される。この種のX線装置により空間内における任意の動きが簡単に実行可能である。
【図面の簡単な説明】
【0036】
【図1】従来技術に基づくCアームX線システムの平面図
【図2】患者の遮断された投影のジオメトリ図
【図3】患者の遮断された投影のジオメトリ図
【図4】本発明にしたがって互いに隣接する2つの投影から合成された拡張投影のジオメトリ図
【図5】本発明にしたがって互いに隣接する2つの投影から合成された拡張投影のジオメトリ図
【図6】本発明にしたがって部分的に重ね合わされた2つの投影から合成された拡張投影のジオメトリ図
【図7】本発明にしたがって部分的に重ね合わされた2つの投影から合成された拡張投影のジオメトリ図
【図8】本発明による3次元画像ボリュームの再構成方法を示すブロック図
【図9】円状曲線軌道についての撮影プロトコルの説明図
【図10】円状曲線軌道についての他の撮影プロトコルの説明図
【図11】円状曲線軌道についての別の撮影プロトコルの説明図
【図12】異なる回転角による撮影システムの2つの投影方向を有する軌道曲線の一部を示す説明図
【図13】本発明によるX線システムの概略図
【図14】本発明による他のX線システムの概略図
【図15】第1の位置にある関心領域を有する投影ジオメトリ図
【図16】第2の位置にある関心領域を有する投影ジオメトリ図
【図17】関心領域の異なった回転角とともに撮影システムの2つの投影方向を有する軌道曲線の一部を示す投影ジオメトリ図
【図18】関心領域も撮影システムも移動される場合の投影ジオメトリ図
【図19】関心領域も撮影システムも移動される場合の他の投影ジオメトリ図
【図20】関心領域も撮影システムも移動される場合の2つの回転循環の一部を示す投影ジオメトリ図
【図21】個別投影画像と仮想検出器との関係の説明図
【図22】検出器に基づく仮想検出器の構成原理の説明図
【図23】フィルタラインに基づく仮想検出器の構成原理の説明図
【発明を実施するための形態】
【0037】
以下において、図面に概略的に示された実施例に基づいて本発明および従属請求項の特徴による他の有利な構成を、これらの実施例への本発明の限定が行なわれることなしに詳細に説明する。
【0038】
図1には概略的にCアームX線システム1が示されている。X線システム1はCアーム2を有し、Cアーム2には互いに対向してX線源3およびX線検出器4が一般には固定の向きで固定されている。X線検出器4は例えば固体基板上における平坦形または湾曲形X線検出器4である。このようなX線検出器4は、例えば、シンチレータとピクセル素子を持った検出器マトリックスとを有する。X線源3はX線ビーム13を発生する。Cアームは、例えば第1の回転軸線11の周りを矢印方向12に回転させられることによって、患者用寝台6上に存在する関心領域5、例えば患者の周りを回転(傾斜)可能である。撮影システムのそれぞれの投影方向から種々の角度位置について2D投影画像が撮影される。この場合に関心領域5は、中心点が回転軸線11上に位置するように配置されている。
【0039】
このようにして得られた2D投影画像は制御および計算ユニット7に転送される。制御および計算ユニット7は少なくとも1つのデータメモリ8とプロセッサ等を備えた1つの計算モジュール9とを含む。投影画像を3Dボリュームへ再構成することは、制御および計算ユニット7において、例えばフィルタ逆投影による、または逆投影およびフィルタ処理による公知の方法に基づいて行なわれる。撮影された投影画像ならびに場合によっては再構成された画像ボリュームを画面10において観察することができる。
【0040】
図2および図3は、湾曲形X線検出器4.1および平坦形X線検出器4.2の例でそれぞれ、従来技術に基づく関心領域5の2次元投影画像から3次元画像ボリュームを再構成する方法における関心領域5の遮断された投影の問題を示す。この問題は、遮断されたフィルタラインのために、撮像すべき関心領域5の3Dボリュームをアーチファクトなしに再構成することができないという結果をもたらす。X線ビーム13がX線源3の焦点15から放射方向16に出射して関心領域5を透過し、X線検出器4に入射する。Cアーム2の360°の完全な一回転の際に焦点15の軌跡は軌道曲線14を描く。関心領域5の部分は、軌道曲線14のどの曲線点からもX線ビーム13によって捕捉されるわけではなく、若干の曲線点については遮断される。この場合に、投影中心17は、あらゆる任意の曲線点においてX線ビーム13によって捕捉される範囲を表す。
【0041】
図4ないし図12に基づいて、本発明による方法の第1の代替策を具体的に説明する。この代替策の場合には2つ又はそれ以上の個別の合成された投影画像が走査軌道14上の焦点15の固定位置において撮影される。図13および図14は第1の代替策における方法の実施に適した2つのX線装置を示す。
【0042】
図4ないし図7は、X線源3および特にX線源3の焦点15を中心とする撮影システムの回転角度に関して異なる2つの個別投影画像を、1つの特定曲線点について1つの拡張された投影画像に合成することによって、仮想的に拡張された検出器20を生じる、本発明による方法に使用されるX線検出器の仮想拡張を示す。この場合に、図2および図3と同様に、湾曲形X線検出器4.1の例(図4および図6)および平坦形X線検出器4.2の例(図5および図7)が示されている。それぞれのX線検出器4およびX線源3は互いに固定的に位置合わせされている。
【0043】
図4は、1つの特定曲線点について、X線源3の焦点15を中心とする撮影システムの回転角度に関して異なる2つの位置で、X線源3および湾曲形X線検出器4.1からなる撮影システムを示す。X線源3の焦点15を中心とする撮影システムの回転は例えば第2の回転方向18に行なわれる。撮影システムのそれぞれの投影方向16が相応の矢印によって示されている。本発明による方法では、撮影システムの両投影方向16のそれぞれについて1つの投影画像が撮影され、引続いて1つの拡張された投影画像(拡張投影画像)に合成される。
【0044】
X線検出器4のこの仮想拡張によって、撮影システムのそれぞれの投影方向16を適切に選定すると、関心領域5は軌道曲線14のどの曲線点からも完全に両X線ビーム13から成る拡張X線ビームにより投影中心17において捕捉可能であるので、遮断された投影はもはや存在しない。2つよりも多い投影画像を1つの拡張投影画像に合成することもできる。
【0045】
図12は、X線源3の焦点15を中心とする第2の回転方向18への撮影システムの回転と、撮影システムの異なる回転角による、すなわち撮影システムの第1の回転角αおよび撮影システムの第2の回転角βによる撮影システムのそれぞれの投影方向16とを拡大して示す。この場合に、(図12に示されている)中心位置に対して撮影システムの第1の回転角αが負の第2の回転角βに等しいならば、特に有利である。
【0046】
図4は、図6と違って、X線ビーム13が重ならないかまたはほとんど重ならないで、同一平面上で接している、撮影システムの2つの個別の投影方向16のケースを示す。このようなケースにおいては、特に大きな関心領域が撮像可能であり、複数の個々の投影画像(個別投影画像)を1つの拡張投影画像へ合成することが容易になる。図6においては、個々の投影画像が部分的に重なり合うように撮影システムの投影方向16が選定されている。これは、例えば画像処理アルゴリズムによる現実の軌道曲線の較正のために有意義である。重なり範囲は、X線線量を少なくするために、再構成時に適切なコリメーションによって再び零に低減されるとよい。
【0047】
図5および図7は、図4および図6に対応して平坦形X線検出器4.2のケースを示す。このケースでは個別投影画像は補正により合成されなければならない。合成された投影画像において一様な分解能を可能にする湾曲形X線検出器4.1と違って、平坦形X線検出器を使用する場合には、拡張投影画像における分解能が縁部に向かって低下することが考慮されて、評価に取り込まれなければならない。
【0048】
本発明による3次元画像ボリュームの再構成方法では、画像ボリュームのボクセルのグレー値が拡張投影画像の逆投影によって算出される。このために、あらゆる公知の再構成アルゴリズム、例えばフェルドカンプアルゴリズムを使用することができる。拡張投影画像の使用によって、再構成可能な領域を著しく拡張することができるので、大きな身体領域もアーチファクトなしに3次元表示可能である。
【0049】
図8は第1のステップ21、第2のステップ22および第3のステップ23からなる本発明による方法を示す。第1の方法ステップ21においては、例えば第1の代替策に基づいて、異なる曲線点ごとにそれぞれ2つの投影画像が撮影されて記憶される。この場合に2つの投影画像はX線源の焦点を中心とする撮影システムの回転角に関して異なっている。第2のステップ22においては、各曲線点について2つの投影画像が1つの拡張投影画像に合成される。これは例えば制御および計算ユニット7において実行される。引続いて第3のステップ23において、拡張された2次元投影画像からの患者の3次元画像ボリュームの再構成が公知の再構成アルゴリズムに基づいて行なわれる。これは同様に制御および計算ユニット7において実行可能である。
【0050】
図9乃至図11は異なる2次元投影画像を撮影するための円状曲線軌道についての種々の可能な撮影プロトコルを示す。図9には、撮影システムが関心領域5の周りを360°回転する際に、唯一の回転循環において模範的に8つの曲線点24が相前後して到達され、各曲線点で順番に第1の投影画像および第2の投影画像を撮影する撮影プロトコルが示されている。このために各曲線点においてそれぞれ、X線源の焦点を中心とする撮影システムの回転が必要である。図11は図9と類似の撮影プロトコルを示し、この場合には、(例えば、ショートスキャンまたはスーパーショートスキャンのように)関心領域の周りにおける撮影システムの回転は225°またはそれよりも少ない角度しか行なわれない。部分円を走行することもできることが、(例えば、検出器ずらしのような)他の試みに比べて、本発明による方法の有利性を際立たせる。
【0051】
図10においては、撮影システムが関心領域5の周りを360°回転する際に模範的に8つの曲線点24が第1の回転循環にて相次いで到達され、各曲線点で第1の投影画像が撮影される。引続いてX線源の焦点を中心として撮影システムが回転し、そして全ての曲線点24が第2の回転循環にて逆の順序で相次いで到達され、各曲線点で第2の投影画像が撮影される。この原理は(例えばスパイラル、円および線、円および円弧のような)他の軌道曲線に有利に転用することができる。
【0052】
対象に依存した重なりは、例えば、関心領域の寸法が少なくともほぼ既知である場合に調整することができる。例えば、僅かのX線線量による1つ又は複数の予備撮影によって関心領域の寸法を決定し、引続いて重なりを手動または自動で調整することができる。投影の重なり範囲においては測定データが平均化され、このことは測定値の標準偏差の低減つまりノイズ低減を生じる。
【0053】
図13は本発明の実施例として他のCアームX線装置30を示す。このCアームX線装置30は、従来技術によるX線装置1とは、関心領域5の周りにおけるCアーム2の回転のほかにX線源3およびX線検出器4からなる撮影システムが共通に放射源3の焦点15における第2の回転中心を中心にして回転可能である点で相違する。特に、撮影システムはCアーム2の回転平面内で回転可能である。
【0054】
図13は、休止位置のほかに、撮影システムがCアーム平面においてX線源3の焦点を中心としてそれぞれある角度(>0)だけ回転させられている他の2つの位置を破線で示す。制御および計算ユニット7はその回転の制御に使用することができる。X線源3は例えば傾斜可能に取り付けられている。X線検出器4はレール25上にこのレールに沿って移動可能であるように取り付けられている。撮影システムは、本発明による方法の効果的な利用のために、X線源3を中心にして両方向に少なくとも5°回転可能であるべきである。この種のシステムにおいて、X線源およびX線検出器が互いに一定の距離および同じままに保たれる方位を有するように考慮されなければならない。本発明の他の実施形態によれば、撮影システムが放射源、特に放射源の焦点における第2の回転中心を中心にして回転可能であるコンピュータ断層撮影X線装置が設けられている。
【0055】
本発明による方法は、例えばCアームX線装置によって発生されるコーンビーム形状のX線ビームに対しても、コンピュータ断層撮影X線装置によって発生されるファンビーム形状のX線ビームに対しても有利に使用可能である。
【0056】
図14は本発明の実施形態としてロボット式X線装置31を示す。このロボット型X線装置においては、撮影システムを支持するCアーム2がいわゆる多関節アームロボット32に配置されている。例えば自動車の工業生産において標準的に使用されるこのような多関節アームロボット32は、例えば6つの回転軸を有し、それによって空間内でのあらゆる任意の動きが可能である。制御および計算ユニット7は、またしてもX線源3の焦点15を中心とする撮影システムの回転の制御に使用される。例えば操作者によって関心領域の高さおよび幅が制御および計算ユニット7に伝達され、制御および計算ユニット7が関心領域の完全な撮像に必要な回転角を算出する。引続いて制御および計算ユニット7が多関節アームロボット32およびCアーム2のひき続く動きを制御する。
【0057】
ロボット式X線装置31により、Cアーム2の回転平面における回転角だけでなく、例えばその回転平面に対して垂直な平面における回転角またはX線検出器上の中心位置へのX線源の垂線と交差する他の平面における回転角が、関心領域のどの部分を撮影すべきかに応じて可能である。一般に、引続いて合成される少なくとも2つの個別投影の回転角が一平面内にあることが好ましい。
【0058】
本発明による方法の第2の代替策において、それぞれ少なくとも2つの個別投影画像は、焦点15および撮影システムが位置固定である際に関心領域5が焦点15の周りにまたは焦点15を通る回転軸の周りに回転する回転角に関して異なる。したがって、第1の代替策におけると同様に、焦点15の各曲線点において2つの(または2つよりも多い)個別投影画像が撮影され、引続いて1つの拡張投影画像に合成される。異なる個別投影画像のために、関心領域5がX線源3の焦点15の周りを回転させられる。その際に焦点15に対する関心領域5の相対的位置は同じままである。
【0059】
図15は第1の個別投影画像が撮影される関心領域5の第1の位置を示し、図16は第2の個別投影画像が撮影される関心領域5の第2の位置を示す。それぞれの回転角は、焦点15の周りに関心領域5が回転させられる場合に、焦点15から関心領域5の中心点33への投影方向34に関係する。回転角零点として、例えばX線検出器4への焦点15の垂線が使用されるとよい。
【0060】
図17は、焦点15から関心領域5の中心点33への両投影方向34を模範的に示し、例えば関心領域5の第1の位置において関心領域5の第1の回転角χが生じ、関心領域5の第2の位置において関心領域5の第2の回転角δが生じる。引続いて投影画像が合成され、通常のように再構成される。
【0061】
焦点の周りにおける関心領域5の回転移動は、空間内で任意に移動可能な寝台装置、例えば移動可能な患者用テーブル36によって実行される。空間内において、つまり6つの自由度をもって移動可能な患者用テーブル36の移動は、例えば特に、移動可能な患者用テーブルが配置されている6軸の多関節アームロボットによって行なわれる。患者が移動可能な患者用テーブル36上にしっかり固定されるように考慮すべきである。なぜならば、患者用テーブル36が回転するからである。
【0062】
本発明による方法のこの代替策の場合にも、1つの回転循環内において到達された各曲線点で、交互に2つの個別投影画像が、その間に焦点15の周りで行なわれる関心領域5の回転をともなって撮影されるか、又は、先ず1つの回転循環において全ての曲線点についてそれぞれ第1の投影画像が撮影され、引続いて回転後に第2の回転循環において全ての曲線点についてそれぞれ第2の投影画像が撮影される。更に、この場合にも個別投影画像の部分的な重なりを設けてもよい。
【0063】
本発明の第3の代替策では、第1の個別投影画像における関心領域5も撮影システムも第2の個別投影画像に比べて異なる位置を持つが、焦点15と関心領域5との間の相対的位置は一定である。焦点15は、走査軌道上における両位置にあって、もちろん同一の個所になく、焦点15の両位置間の接続区間40は関心領域5の中心点33の両位置間の接続区間41に対して平行でありかつ同じ長さを有する。したがって、2つよりも多い投影画像が合成される場合には、相応のことが他の個別投影画像について当てはまる。
【0064】
図18は、焦点15と模範的に平坦形X線検出器4.2とによって表示された撮影システムならびに関心領域5を、第1の個別投影画像が撮影される第1の位置(実線)および第2の個別投影画像が撮影される第2の位置(鎖線)に示す。第1の個別投影画像および第2の個別投影画像が引続いて1つの拡張投影画像に合成され、他の拡張投影画像と共に通常のように再構成される。
【0065】
焦点15と関心領域5との間の相対的位置は両位置において同じであり、これは、関心領域5内の任意に選択された2つの固定点と焦点15とによって設定される3角形が第1の位置(第1の個別投影画像)および第2の位置(第2の個別投影画像)において同じ大きさを有することを意味する。更に、第1の位置と第2の位置との間の幾何学的関係は次のとおりである。第1の位置の関心領域5が第2の関心領域5と一致させられたとするならば、焦点15を中心とする撮影システムの回転から第2の位置における撮影システムが生じる。図19は、同様に、第1の個別投影画像を撮影するための第1の位置(実線)および第2の個別投影画像を撮影するための第2の位置(鎖線)を示し、第1の投影画像および第2の投影画像は引続いて合成可能である。
【0066】
第3の代替策は、第1の代替策に比べて、回転軸11の周りにだけ回転可能である従来のCアームX線装置によっても実施可能であるという利点を有し、しかし付加的に位置調整可能な患者用テーブルが存在する。第3の代替策は、第2の代替策に比べて、関心領域5を受入れる患者用テーブルがCアーム平面内だけで2次元に移動可能であればよく、傾斜させられる必要がなく、それによって患者の支え(横たえ)が明らかに簡単化されているという利点を有する。
【0067】
図20は、2つの回転循環からの部分を3つずつ示し、この場合に投影画像の撮影順序は次のとおりである。すなわち、先ず、関心領域の周りにおける撮影システムの第1の回転循環(実線、図の上側)の際に第1の個別投影画像の全てが撮影され、引続いて関心領域の周りにおける撮影システムの第2の回転循環(鎖線、図の下側)の際に第2の個別投影画像の全てが撮影される。撮影に引続いて、各第1の投影画像とそれぞれに対応する第2の投影画像とが合成される。回転循環は360°以下であってよい。
【0068】
投影画像の撮影順序は次のとおりであってもよい。すなわち、それぞれ1つの拡張2次元投影画像に合成されるそれぞれ少なくとも2つの個別投影画像が、関心領域の周りにおける撮影システムの唯一の回転循環においてそれぞれ直接的な続きで撮影される。
【0069】
本発明の第2および第3の代替策においても、合成すべき個別投影画像が部分的に重ねられてもよいし、同一平面上で互いに接していてもよい。
【0070】
少なくとも2つの投影画像を1つの拡張投影画像に合成するためには、いわゆる仮想検出器を構成することが好ましく、仮想検出器は付加的に撮影システムおよび対象の空間的な位置および配置を記述する。仮想検出器の構築のために2つの方法が使用される。第1の方法は検出器に基づいて、つまりX線検出器の検出器マトリックスのデカルト座標配置を基礎として実施され、第2の方法はフィルタラインに基づいて、つまりフィルタラインの配置を基礎として実施される。
【0071】
図21に示されているように、仮想検出器20における、つまり合成された拡張投影画像における点xi,xjと、第1の個別投影画像I'および第2の個別投影画像I"における点xi',xj"との間において、ホモグラフィH',H"、すなわち第1の個別投影画像I'に関連づけられた第1のホモグラフィH'および第2の個別投影画像I"に関連づけられた第2のホモグラフィH"によって、次の関係が定義される。
(a)xi'=H' xi
(b)xj"=H" xj
【0072】
検出器におけるラインいわゆるフィルタラインに沿ってFBPアルゴリズムにおいて実行すべきフィルタ処理に関しては、特に新しい再構成方法が傾斜したフィルタラインを規定することから、フィルタラインの配置(フィルタライン方式)に基づいて、かつ検出器マトリックスのデカルト配置(検出器方式)に基づかないで、仮想検出器を構築することが有意義である(図23)。
【0073】
仮想検出器のフィルタラインに基づく構成は、フィルタラインに沿った値が方程式(a),(b)により第1の個別投影画像I'および第2の個別投影画像I"から直接に算出可能であり、それによって仮想検出器20からのこれらの値の後の補間が回避されるという利点を有する。
【0074】
フィルタライン方式は、検出器方式と違って、もはや再構成の独立したステップとして理解することができない。なぜならば、フィルタラインの位置が加えられなければならず、フィルタラインの位置が再構成アルゴリズムに依存するからである。しかしながら、再構成のフィルタラインに基づく試みは、傾斜したフィルタラインの場合に補間時の個数を減らし、多くの場合に再構成時に計算時間に関しても達成可能な位置分解能に関しても検出器方式よりも好まれる。FDKアルゴリズムにおいては、フィルタライン方式および検出器方式が同じ意味を持つ。なぜならば、この場合には検出器列がフィルタラインと一致するからである。したがって、検出器に基づく試みは、フィルタラインに基づく試みの特殊事例、すなわちフィルタラインが検出器ラスタ上にある特殊事例とみなすことができる。
【0075】
第1のホモグラフィH'および第2のホモグラフィH"は、第1の投影画像I'と仮想検出器20との間ならびに第2の投影画像I"と仮想検出器20との間の図21に示された幾何学的関係を規定する。ホモグラフィH',H"により、第1の投影画像I'の点xi''および第2の投影画像I"の点xj"の位置における必要なグレー値が個別投影画像I',I"から取り出される。点xi',xj"の撮像(写像)xi,xjは、一般にもはや検出器ラスタ上になく、そのためにこれらの位置におけるグレー値は存在する隣接値からの補間、例えばバイリニア補間によって求められる。個別投影画像I',I"の重なり範囲は仮想検出器20においてハッチングで強調されている。
【0076】
図22は任意の検出器列の例における検出器に基づく試みを示し、図23は任意のフィルタラインに基づく試みを示す。黒く塗りつぶされた点は、それぞれ個別投影画像I'およびI"のグレー値からの補間によってグレー値が決定された仮想検出器20上の位置を示す。中空の点はそれぞれ個別投影画像上の位置を示す。第1の投影画像I'と第2の投影画像I"との重なり範囲(ハッチング範囲)においては適切な補間方法が適用されるべきである。なぜならばこの場合には両個別投影画像からのグレー値が存在するからである。
【0077】
破線による点の象徴的な接続は、ホモグラフィH',H"がライン上に再びラインを写像することを具体的に示す(もちろん、点(およびそれにともなう走査)の間隔がラインに沿って変化する。)。同様に、検出器に基づく試みがフィルタラインに基づく試みの特殊事例であること、すなわち水平ラインに沿ったフィルタ処理が行なわれる場合の特殊事例であることが明らかである。
【0078】
本発明は、次のように要約される。大きな関心領域の場合および360°を下回る走査軌道の場合にもアーチファクトのない再構成を可能にするために、焦点を有するX線源と検出器とを備えた撮影システムが関心領域の周りを回転する間に撮影された関心領域の複数の2次元投影画像から3次元画像ボリュームを、画像ボリュームのボクセルのグレー値を投影画像の逆投影により算出することによって再構成する方法において、各2次元投影画像がそれぞれ少なくとも2つの個別投影画像から1つの拡張された2次元投影画像に合成され、それぞれ少なくとも2つの個別投影画像が焦点と関心領域との間の一定の相対的位置において撮影される。
【符号の説明】
【0079】
1 CアームX線システム
2 Cアーム
3 X線源
4 X線検出器
4.1 湾曲形X線検出器
4.2 平坦形X線検出器
5 関心領域
6 患者用寝台
7 制御および計算ユニット
8 データメモリ
9 計算モジュール
10 画面
11 回転軸線
12 回転方向
13 X線ビーム
14 軌道曲線
15 焦点
16 放射方向(投影方向)
17 投影中心
18 回転方向
20 仮想検出器
21 第1のステップ
22 第2のステップ
23 第3のステップ
24 曲線点
25 レール
30 CアームX線装置
31 ロボット式X線装置
32 多関節アームロボット
33 関心領域の中心点
34 投影方向
36 移動可能な患者用テーブル
40 焦点の両位置間の接続区間
41 関心領域の中心点の両位置間の接続区間
α 第1の回転角
β 第2の回転角
χ 第1の回転角
δ 第2の回転角
H' 第1のホモグラフィ
H" 第2のホモグラフィ
I' 第1の投影画像
I" 第2の投影画像
xi 拡張投影画像における点
xj 拡張投影画像における点
xi' 第1の個別投影画像I'における点
xj" 第2の個別投影画像I"における点
【特許請求の範囲】
【請求項1】
焦点(15)を有するX線源(3)と検出器(4)とを備えた撮影システム(3;4)が関心領域(5)の周りを回転する間に撮影された関心領域の複数の2次元投影画像から3次元画像ボリュームを、画像ボリュームのボクセルのグレー値を投影画像の逆投影により算出することによって再構成する3次元画像ボリュームの再構成方法であって、
各2次元投影画像がそれぞれ少なくとも2つの個別投影画像から1つの拡張された2次元投影画像に合成され、それぞれ少なくとも2つの個別投影画像が焦点(15)と関心領域(5)との間の一定の相対的位置において撮影される3次元画像ボリュームの再構成方法において、
それぞれ少なくとも2つの個別投影画像は、焦点(15)および関心領域(5)が一定の相対的位置にて互いに異なって位置決めされかつ撮影システム(3;4)が焦点(15)を中心にしてまたは焦点(15)を通る回転軸線を中心にして異なって回転させられるように異なっていることを特徴とする3次元画像ボリュームの再構成方法。
【請求項2】
それぞれ2つの個別投影画像が作成されて1つの拡張された投影画像に合成されることを特徴とする請求項1記載の方法。
【請求項3】
少なくとも2つの個別投影画像のそれぞれの回転角が一平面内に配置されていることを特徴とする請求項1又は2記載の方法。
【請求項4】
焦点(15)を中心とする撮影システム(3;4)または関心領域(5)のそれぞれの回転は、関心領域(5)の周りにおける撮影システム(3;4)の回転平面内にあることを特徴とする請求項1乃至3の1つに記載の方法。
【請求項5】
第1の個別投影画像は焦点(15)を中心とするまたは焦点(15)を通る回転軸線を中心とする撮影システム(3;4)の第1の回転角(α)において撮影され、第2の個別投影画像は焦点(15)を中心とするまたは焦点(15)を通る回転軸線を中心とする撮影システム(3;4)の第2の回転角(β)において撮影され、第1の回転角(α)が負の第2の回転角(β)に一致することを特徴とする請求項1乃至4の1つに記載の方法。
【請求項6】
それぞれ合成される個別投影画像が0%よりも大きく50%よりも小さい相互の重なりを有することを特徴とする請求項1乃至5の1つに記載の方法。
【請求項7】
それぞれ合成される個別投影画像が0%よりも大きく10%よりも小さい相互の重なりを有することを特徴とする請求項1乃至6の1つに記載の方法。
【請求項8】
重なりが対象に依存して、特に対象の大きさに依存して設定されることを特徴とする請求項6又は7記載の方法。
【請求項9】
投影画像の撮影順序は、先ず関心領域(5)の周りにおける撮影システム(3;4)の第1の回転循環において全ての第1の個別投影画像が撮影され、続いて関心領域(5)の周りにおける撮影システム(3;4)の第2の回転循環において全ての第2の個別投影画像が撮影されるように定められ、各第1の投影画像がそれぞれ1つの第2の投影画像と合成されることを特徴とする請求項1乃至8の1つに記載の方法。
【請求項10】
投影画像の撮影順序は、それぞれ1つの拡張2次元投影画像に合成されるそれぞれ少なくとも2つの個別投影画像が関心領域(5)の周りにおける撮影システムの唯一の回転循環においてそれぞれ直接的な続きで撮影されるように定められていることを特徴とする請求項1乃至9の1つに記載の方法。
【請求項11】
投影画像を撮影するためにX線源(3)から発生されるX線ビームがコーンビームの形状を有することを特徴とする請求項1乃至10の1つに記載の方法。
【請求項12】
投影画像を撮影するためにX線源(3)から発生されるX線ビームがファンビームの形状を有することを特徴とする請求項1乃至11の1つに記載の方法。
【請求項13】
仮想検出器(20)がX線検出器(4)の検出器マトリックスのデカルト座標配置に基づいて構成されることによって、少なくとも2つの個別投影画像が合成されることを特徴とする請求項1乃至12の1つに記載の方法。
【請求項14】
仮想検出器(20)がフィルタラインの配置に基づいて構成されることによって、少なくとも2つの個別投影画像が合成されることを特徴とする請求項1乃至13の1つに記載の方法。
【請求項15】
関心領域(5)の2次元投影画像を撮影するためのX線源(3)およびX線検出器(4)を含む撮影システム(3;4)と、
2次元投影画像から3次元画像ボリュームを再構成するための制御および計算ユニットとを備え、
撮影システム(3;4)は、X線源(3)とX線検出器(4)との間における第1の回転中心の周りを回転可能であると共に、X線源(3)の焦点(15)における第2の回転中心を中心にしてまたはX線源(3)の焦点(15)を通る回転軸線を中心にして回転可能である
ことを特徴とする請求項1乃至14の1つに記載の方法を実施するためのX線装置。
【請求項16】
CアームX線装置(30;31)によって構成されることを特徴とする請求項15記載のX線装置。
【請求項17】
撮影システム(3;4)が直接にまたは支持体を介して多関節アームロボットまたは産業ロボット(32)に配置されていることを特徴とする請求項15記載のX線装置。
【請求項18】
コンピュータ断層撮影装置によって構成されることを特徴とする請求項15記載のX線装置。
【請求項1】
焦点(15)を有するX線源(3)と検出器(4)とを備えた撮影システム(3;4)が関心領域(5)の周りを回転する間に撮影された関心領域の複数の2次元投影画像から3次元画像ボリュームを、画像ボリュームのボクセルのグレー値を投影画像の逆投影により算出することによって再構成する3次元画像ボリュームの再構成方法であって、
各2次元投影画像がそれぞれ少なくとも2つの個別投影画像から1つの拡張された2次元投影画像に合成され、それぞれ少なくとも2つの個別投影画像が焦点(15)と関心領域(5)との間の一定の相対的位置において撮影される3次元画像ボリュームの再構成方法において、
それぞれ少なくとも2つの個別投影画像は、焦点(15)および関心領域(5)が一定の相対的位置にて互いに異なって位置決めされかつ撮影システム(3;4)が焦点(15)を中心にしてまたは焦点(15)を通る回転軸線を中心にして異なって回転させられるように異なっていることを特徴とする3次元画像ボリュームの再構成方法。
【請求項2】
それぞれ2つの個別投影画像が作成されて1つの拡張された投影画像に合成されることを特徴とする請求項1記載の方法。
【請求項3】
少なくとも2つの個別投影画像のそれぞれの回転角が一平面内に配置されていることを特徴とする請求項1又は2記載の方法。
【請求項4】
焦点(15)を中心とする撮影システム(3;4)または関心領域(5)のそれぞれの回転は、関心領域(5)の周りにおける撮影システム(3;4)の回転平面内にあることを特徴とする請求項1乃至3の1つに記載の方法。
【請求項5】
第1の個別投影画像は焦点(15)を中心とするまたは焦点(15)を通る回転軸線を中心とする撮影システム(3;4)の第1の回転角(α)において撮影され、第2の個別投影画像は焦点(15)を中心とするまたは焦点(15)を通る回転軸線を中心とする撮影システム(3;4)の第2の回転角(β)において撮影され、第1の回転角(α)が負の第2の回転角(β)に一致することを特徴とする請求項1乃至4の1つに記載の方法。
【請求項6】
それぞれ合成される個別投影画像が0%よりも大きく50%よりも小さい相互の重なりを有することを特徴とする請求項1乃至5の1つに記載の方法。
【請求項7】
それぞれ合成される個別投影画像が0%よりも大きく10%よりも小さい相互の重なりを有することを特徴とする請求項1乃至6の1つに記載の方法。
【請求項8】
重なりが対象に依存して、特に対象の大きさに依存して設定されることを特徴とする請求項6又は7記載の方法。
【請求項9】
投影画像の撮影順序は、先ず関心領域(5)の周りにおける撮影システム(3;4)の第1の回転循環において全ての第1の個別投影画像が撮影され、続いて関心領域(5)の周りにおける撮影システム(3;4)の第2の回転循環において全ての第2の個別投影画像が撮影されるように定められ、各第1の投影画像がそれぞれ1つの第2の投影画像と合成されることを特徴とする請求項1乃至8の1つに記載の方法。
【請求項10】
投影画像の撮影順序は、それぞれ1つの拡張2次元投影画像に合成されるそれぞれ少なくとも2つの個別投影画像が関心領域(5)の周りにおける撮影システムの唯一の回転循環においてそれぞれ直接的な続きで撮影されるように定められていることを特徴とする請求項1乃至9の1つに記載の方法。
【請求項11】
投影画像を撮影するためにX線源(3)から発生されるX線ビームがコーンビームの形状を有することを特徴とする請求項1乃至10の1つに記載の方法。
【請求項12】
投影画像を撮影するためにX線源(3)から発生されるX線ビームがファンビームの形状を有することを特徴とする請求項1乃至11の1つに記載の方法。
【請求項13】
仮想検出器(20)がX線検出器(4)の検出器マトリックスのデカルト座標配置に基づいて構成されることによって、少なくとも2つの個別投影画像が合成されることを特徴とする請求項1乃至12の1つに記載の方法。
【請求項14】
仮想検出器(20)がフィルタラインの配置に基づいて構成されることによって、少なくとも2つの個別投影画像が合成されることを特徴とする請求項1乃至13の1つに記載の方法。
【請求項15】
関心領域(5)の2次元投影画像を撮影するためのX線源(3)およびX線検出器(4)を含む撮影システム(3;4)と、
2次元投影画像から3次元画像ボリュームを再構成するための制御および計算ユニットとを備え、
撮影システム(3;4)は、X線源(3)とX線検出器(4)との間における第1の回転中心の周りを回転可能であると共に、X線源(3)の焦点(15)における第2の回転中心を中心にしてまたはX線源(3)の焦点(15)を通る回転軸線を中心にして回転可能である
ことを特徴とする請求項1乃至14の1つに記載の方法を実施するためのX線装置。
【請求項16】
CアームX線装置(30;31)によって構成されることを特徴とする請求項15記載のX線装置。
【請求項17】
撮影システム(3;4)が直接にまたは支持体を介して多関節アームロボットまたは産業ロボット(32)に配置されていることを特徴とする請求項15記載のX線装置。
【請求項18】
コンピュータ断層撮影装置によって構成されることを特徴とする請求項15記載のX線装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2013−66791(P2013−66791A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2013−10174(P2013−10174)
【出願日】平成25年1月23日(2013.1.23)
【分割の表示】特願2007−223685(P2007−223685)の分割
【原出願日】平成19年8月30日(2007.8.30)
【出願人】(390039413)シーメンス アクチエンゲゼルシヤフト (2,104)
【氏名又は名称原語表記】Siemens Aktiengesellschaft
【住所又は居所原語表記】Wittelsbacherplatz 2, D−80333 Muenchen, Germany
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成25年1月23日(2013.1.23)
【分割の表示】特願2007−223685(P2007−223685)の分割
【原出願日】平成19年8月30日(2007.8.30)
【出願人】(390039413)シーメンス アクチエンゲゼルシヤフト (2,104)
【氏名又は名称原語表記】Siemens Aktiengesellschaft
【住所又は居所原語表記】Wittelsbacherplatz 2, D−80333 Muenchen, Germany
【Fターム(参考)】
[ Back to top ]