
3次元画像処理装置、光軸調整方法、光軸調整支援方法
【課題】専門知識をもたない者であっても簡単かつ高精度に光軸の向き調整が行えるようにするための技術を提供する。
【解決手段】複数の撮像装置を備えた3次元画像処理装置において、撮像装置から画像の光学的な中心を各撮像装置について記憶させておく。そして、撮像装置から得られた画像に、その光学的な中心を表すマークを合成して表示する。各撮像装置に係るマークを参照して、全てのマークが対象物上の同一点に重なるように各撮像装置の向きを調整する。
【解決手段】複数の撮像装置を備えた3次元画像処理装置において、撮像装置から画像の光学的な中心を各撮像装置について記憶させておく。そして、撮像装置から得られた画像に、その光学的な中心を表すマークを合成して表示する。各撮像装置に係るマークを参照して、全てのマークが対象物上の同一点に重なるように各撮像装置の向きを調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の撮像装置で得られたステレオ画像から対象物の3次元情報を取得する3次元画像処理装置に関し、特に撮像装置同士の光軸の向きを調整するための技術に関する。
【背景技術】
【0002】
画像から撮像対象の3次元情報を得る手法として、所定の撮像エリアを所定間隔で配置された複数の撮像装置によって撮像し、得られた複数枚の画像上における撮像対象の結像点の各撮像装置間での対応関係を求める方法がある。この手法は一般にステレオ画像処理と呼ばれる。
【0003】
ステレオ画像処理を利用した3次元画像処理装置においては、各撮像装置の光軸を平行に設定する場合と、光軸を輻輳(交差)させる場合とがある(特許文献1参照)。後者の場合、撮像装置同士の共通視野を確保しやすいという利点があり、特に、撮像装置自体の幅よりも撮像装置間の距離を小さく設定しなければならない場面や、撮像装置と撮像対象物との距離が小さい場面などで有効である。加えて、光軸を輻輳させた場合には、(1)撮像装置間の幾何学的配置を記述するパラメータの推定精度が安定する、(2)画像中心付近に投影される対象物の視差が0に近い値になるため、視差算出の計算コストが削減できるなどのメリットもある。
【特許文献1】特開平7−175143号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
このように「輻輳」には種々の利点があるものの、現実には、光軸は目に見えるものではないため、各撮像装置の光軸の向きを調整することは非常に難しい。画像処理の専門知識をもたないユーザーならなおさらである。
【0005】
そこで特許文献1では、光軸上の注視点が撮像素子の中心に結像する(つまり光軸が撮像素子の中心と交わる)という仮定の下、画像の中心部分の相関に基づいて光軸調整を自動的に行う方法を試みている。
【0006】
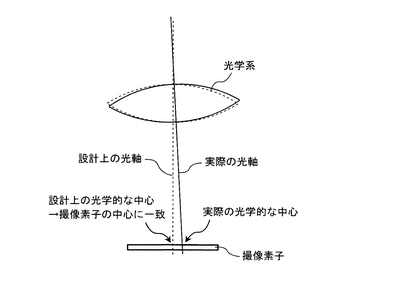
しかしながら実際の撮像装置では、撮像素子と光学系のマウントばらつきにより、光軸が撮像素子の中心と交わる保障はない(図13参照)。しかも、光軸が撮像素子に交わる点(画像の光学的な中心)と撮像素子の中心(画像の中心)とのズレ量は、焦点距離を変えることで変化する可能性もある。また、画像の中心部分に特徴的な像点が含まれていない場合や、似たパターンが繰り返し現れるような画像であった場合には、画像の誤対応を生じるおそれもある。したがって、特許文献1の手法では光軸調整の精度に限界がある。
【0007】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、専門知識をもたない者であっても簡単かつ高精度に光軸の向き調整が行えるようにするための技術を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために本発明では、撮像装置(撮像手段)の光軸もしくは光軸上の注視点に相当する情報を可視像化し、その可視像を光軸の向き調整のための参照情報として利用する。
【0009】
具体的には、本発明の一態様に係る3次元画像処理装置は、複数の画像から対象物の3次元情報を取得するものであって、複数の撮像手段(撮像装置)と、前記撮像手段によって撮像される画像の光学的な中心を各撮像手段について記憶する記憶手段(記憶装置)と、前記撮像手段から得られた画像に、光学的な中心を表すマークを合成して表示する表示手段(処理部および表示部)と、を備える。
【0010】
ここで「画像の光学的な中心」とは、光軸が撮像手段の撮像素子に交わる点に対応し、「光学的な中心を表すマーク」は、光軸もしくは光軸上の注視点に相当する情報を可視像化したものに対応する。つまり、ユーザーは、表示手段に表示された画像を見ることで、撮像手段の光軸の向きを視覚的に捉えることができるのである。これにより、たとえ「画像の光学的な中心」と「画像の中心」とがずれていたとしても、各撮像手段に係るマークを参照することによって高精度に光軸の向き調整を行うことが可能となり、比較的容易に光軸の輻輳を実現できる。たとえば、手動で調整を行う場合には、各撮像手段に係るマークを参照して、全てのマークが対象物上の同一点に重なるように各撮像手段の向きを調整すればよい。もちろん、マークに基づいて処理部が自動的に撮像手段の向き調整を行うことも可能である。
【0011】
前記撮像手段が複数の焦点距離を有する場合には、各焦点距離について画像の光学的な中心を記憶手段に記憶させておくことが好ましい。焦点距離が変わると画像の光学的な中心の位置が変化する可能性があるが、撮像手段の焦点距離に応じて記憶手段から読み出す情報を適宜切り替えることで、常に適切な位置にマークを表示することができ、光軸調整の精度を向上させることができる。
【0012】
また、前記表示手段が、前記マークを含む部分を拡大表示することも好ましい。拡大画像を参照することで、光軸の向きの微調整や合わせ込みを精度良く行うことができる。
【0013】
画像およびマークの表示態様としては種々考えられる。第一に、撮像手段ごとに、マークが合成された画像を表示する態様が想定される。この場合、それぞれの画像におけるマークが対象物上の同一点に位置するように、各撮像手段の向きを調整すればよい。
【0014】
第二に、1つの画像に複数の撮像手段に係るマークを合成表示する態様が想定される。たとえば、第1撮像手段から得られた第1画像に、第1画像の光学的な中心を表す第1マークと、第2撮像手段から得られた第2画像の光学的な中心を前記第1画像上へ投影した情報を表す第2マークとを合成して表示するのである。ここで、第1画像上へ投影する第2マークは、第2画像の光学的な中心に写っている像の対応点を表すものでもよいし、第2撮像手段の光軸を第1画像に投影したエピポーラ線を表すものでもよい。
【0015】
また、第1マークと第2マークの位置の相違を表示することも好ましい。たとえば、画像上の距離を表示したり、撮像手段の調整量を表示したりすれば、光軸調整に有用な情報となる。
【0016】
なお、本発明は、上記手段の少なくとも一部を有する3次元画像処理装置として捉えることができるし、また、その装置を用いた光軸調整方法、または、処理部(処理装置)が実行する光軸調整支援方法もしくはプログラムとして捉えることもできる。
【0017】
すなわち、本発明の一態様に係る光軸調整方法は、複数の撮像装置の光軸の向きを調整する光軸調整方法であって、撮像装置で対象物を撮像し、その画像に光学的な中心を表すマークを合成して表示し、各撮像装置に係るマークを参照して、全てのマークが前記対象物上の同一点に重なるように各撮像装置の向きを調整するものである。
【0018】
また、本発明の一態様に係る光軸調整支援方法は、複数の撮像装置と、前記撮像装置によって撮像される画像の光学的な中心を各撮像装置について記憶する記憶装置と、表示部と、が接続された処理装置が、前記撮像装置から画像を取得し、前記記憶装置から光学的な中心を読み込み、各撮像装置の光軸の向き調整を支援するために、前記画像と前記光学的な中心を表すマークとを前記表示部に合成表示するものである。
【0019】
また、本発明の一態様に係るプログラムは、複数の撮像装置と、前記撮像装置によって撮像される画像の光学的な中心を各撮像装置について記憶する記憶装置と、表示部と、が接続された処理装置に、前記撮像装置から画像を取得し、前記記憶装置から光学的な中心を読み込み、各撮像装置の光軸の向き調整を支援するために、前記画像と前記光学的な中心を表すマークとを前記表示部に合成表示する処理を実行させるものである。
【発明の効果】
【0020】
本発明によれば、専門知識をもたない者であっても簡単かつ高精度に光軸の向き調整を行うことができる。
【発明を実施するための最良の形態】
【0021】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0022】
<第1実施形態>
(3次元画像処理装置の構成)
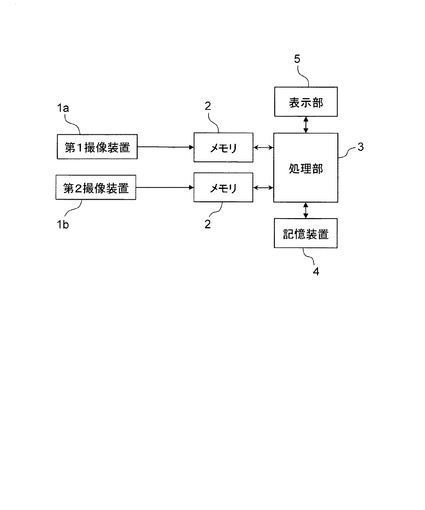
図1は、本発明の実施形態に係る3次元画像処理装置のハードウェア構成を示すブロック図である。3次元画像処理装置は、概略、第1撮像装置1a、第2撮像装置1b、各撮像装置用のメモリ2,2、処理部3、記憶装置4、表示部5を備えて構成される。
【0023】
第1撮像装置1a、第2撮像装置1b(以下、単に「撮像装置」とも呼ぶ。)は、複数のレンズから構成される光学系と、CCDもしくはCMOSなどから構成される撮像素子とを備える撮像手段である。撮像装置1a,1bで得られたディジタル画像はメモリ2に一時的に格納された後、処理部3に入力される。なお、撮像装置1a,1bで取得する画像はカラーでもモノクロでもよく、その解像度等のスペックも撮像対象や装置の用途に応じて適宜選択すればよい。
【0024】
処理部3は、CPU(中央演算処理装置)、RAM、ROM、I/Fなどから構成されるコンピュータであり、ROMもしくは記憶装置4から読み込むプログラムに従って後述する各種の演算処理、制御処理、画像処理等を実行する部分である。
【0025】
記憶装置4は、ディジタルデータ(プログラム含む)を記憶する記憶手段であって、たとえば、磁気ディスク、フラッシュメモリ、光ディスク、または、光磁気ディスクなどで構成される。記憶装置4には、処理部3で実行されるプログラムの他、ステレオ画像処理の際に参照されるパラメータ(第1撮像装置1aと第2撮像装置1bの相対的な位置関係など)、光軸の向き調整の際に参照されるデータ(画像の光学的な中心など)が格納されている。
【0026】
表示部5は、処理部3で生成された表示データを表示する部分であり、ステレオ画像処理の結果、撮像装置1a,1bで撮像した画像、光軸の向き調整用の画像などが出力される。本実施形態では、処理部3と表示部5が本発明の表示手段に対応する。
【0027】
(撮像装置の光軸調整)
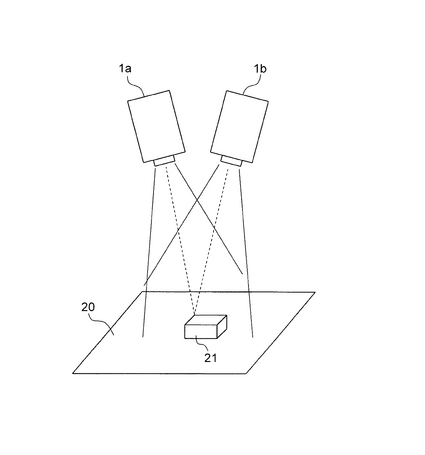
図2は、撮像装置1a,1bの設置例を示している。図2のように、2つの撮像装置1a,1bは、基準平面20上に配置された対象物21を異なる角度から撮影できるような
態様で設置される。
【0028】
本実施形態の撮像装置1a,1bは、上下、左右、前後の3軸の平行移動と、各軸周りの回転の6自由度を有する機構を備えている(6自由度のうちのいくつかを拘束することで、光軸調整を容易化してもよい。)。各撮像装置1a,1bの向き(光軸の向き)および撮像装置−対象物間距離は、ステレオ画像処理に先立って、装置の用途、対象物21の大きさや種類等に応じて適宜調整が行われる。
【0029】
たとえば、3次元画像処理装置を工業製品(電子部品等)の検査装置に応用するのであれば、対象物21が比較的小さいため、撮像装置間の距離および撮像装置−対象物間の距離は十数cm〜数十cm程度が望ましい。そうすると、設置上の物理的な制約から、共通視野を確保するために2つの撮像装置1a,1bの光軸を輻輳させる必要がでる。また、電子部品等の検査にあっては、ミリオーダーからミクロンオーダーの検査精度が要求されることがあり、そのような要求精度に応えるためには光軸の向きを厳密に設定できなければならない。
【0030】
そこで、本実施形態では図3に示す方法により光軸の向き調整を行う。
【0031】
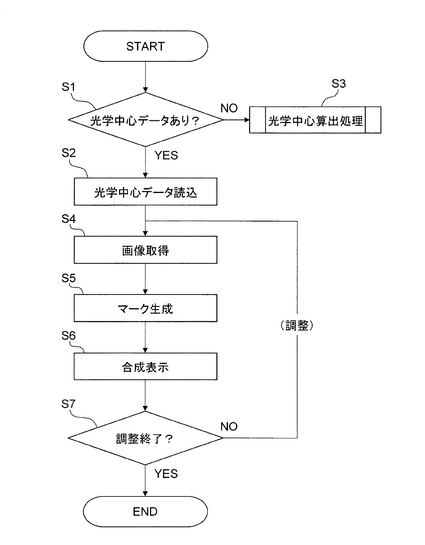
装置を光軸調整モードに切り替えると、処理部3が図3の処理を開始する。まず、処理部3は、記憶装置4に各撮像装置1a,1bの画像の光学的な中心を表すデータ(以下、「光学中心データ」と呼ぶ。)が登録されているか否か調べ、登録されている場合には(ステップS1;YES)、そのデータを読み込む(ステップS2)。
【0032】
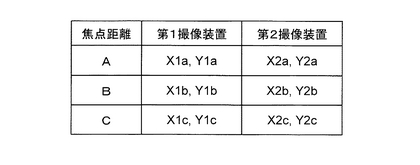
光学中心データは、撮像装置1a,1bの光軸が撮像素子に交わる点の座標値を表すデータであり、第1撮像装置1a用のものと第2撮像装置1b用のものの両方が登録されている。また、撮像装置1a,1bの光学系がズーム機構を有する場合、つまり複数の焦点距離を有する場合には、焦点距離ごとに座標値が格納されている。ただし、焦点距離を変えても光学的な中心がほとんど変化しないならば、単一の座標値でも構わない。
【0033】
図4は、本実施形態における光学中心データの例を示している。本例では、焦点距離A〜Cについて、カメラ座標系(画像上の座標系)における画素単位の座標値(x,y)が登録されている。このような形式の座標値を用いることで、後段の画像合成の計算を簡易化できる。
【0034】
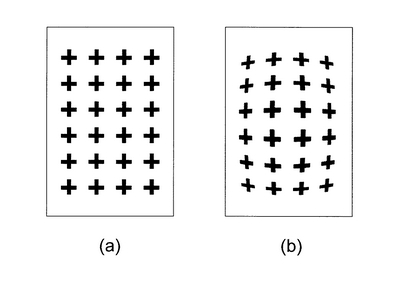
ところで、光学中心データが未登録の場合には(ステップS1;NO)、次のようにして光学中心を算出する(ステップS3)。図5(a)に示す格子状のパターンチャートを基準平面20上に置き、そのチャートを撮像装置で正面から撮影すると、画像上では、図5(b)に示すように、光学系の収差の影響により格子に歪みが生じる。ただし、図5(b)は説明のために格子の歪みを極端に表している。格子の歪みは光軸からの距離に応じて大きくなることが知られているため、格子上の各点の歪み量を解析することで光軸の位置(画像の光学的な中心)を逆算可能である。この推定処理を撮像装置ごと、焦点距離ごとに繰り返して、光学中心データを生成する。なお、光学的な中心を求める手法については他にも種々のものが提案されており、そのいずれを採用しても構わない。
【0035】
次に、処理部3は、第1撮像装置1aで撮像された第1画像をメモリ2から取得するとともに(ステップS4)、ステップS2で読み込んだ第1撮像装置1a用の光学中心データの中から第1撮像装置1aの焦点距離に対応した座標値を選択し、その座標に表示するためのマークを生成する(ステップS5)。また、同様にして、第2撮像装置1aについても第2画像の取得とマークの生成を行う(ステップS4,S5)。
【0036】
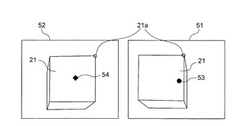
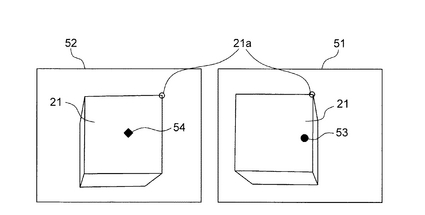
そして、図6に示すように、第1画像51と第2画像52を表示部5に並べて表示し、それぞれの画像にマーク53,54を合成して表示する。つまり本実施形態では、撮像装置1a,1bごとにマークが合成された画像を表示する。
【0037】
マークの形状や色などは、ユーザーによる識別が容易なものが好ましい。たとえば、図6に例示したように中心座標上に丸形状や多角形状のカーソルを表示してもよいし、中心座標でクロスする十字カーソルを表示してもよい。また、色に関していえば、原色や蛍光色などの目立つ色で表示したり、基準平面20や対象物21が有さない色で表示したり、画像に対してXOR表示したりすればよい。
【0038】
これらのマークは光軸を可視像化したものに相当する。ユーザーは、表示部5に表示された画像およびマークを見ることで、各撮像装置1a,1bの光軸の向きを視覚的に捉えることができ、所望の位置からのズレ量や調整方向および調整量などを直感的に把握することができる。また、撮像装置1a,1bの向きを動かすたびにステップS4〜S6の処理が繰り返され(ステップS7;NO)、表示部5の表示画像がリアルタイムに更新されるため、光軸向きの微調整も容易である。
【0039】
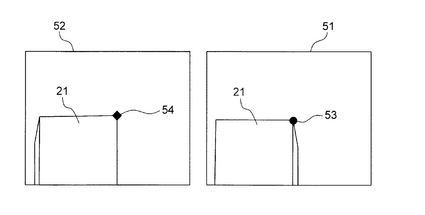
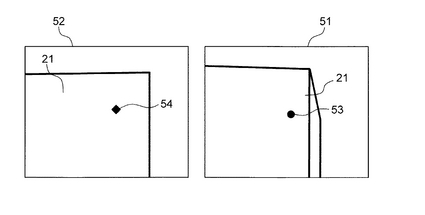
たとえば、対象物21の右上の角の点21aにおいて光軸を交差させたい場合には、次のように調整すればよい。まず第1画像51を参照しながら、マーク53が点21aに重なるように第1撮像装置1aの向きを調整し(図7の右画面)、次いで第2画像52を参照しながら、マーク54も点21aに重なるように第2撮像装置1bの向きを調整する(図7の左画面)。両方のマークが対象物上の同一点21aに重なったら、光軸調整モードを終了する(ステップS7;YES)。これにより光軸の輻輳を実現できる。
【0040】
(ステレオ画像処理)
以上のように光軸調整が完了した後は、第1撮像装置1aと第2撮像装置1bの相対的な位置関係を表すパラメータが再設定され、ステレオ画像処理の準備が整う。
【0041】
ステレオ画像処理モードでは、処理部3が、各撮像装置1a,1bから画像を取得し、それぞれの画像における対象物21の結像点の対応関係に基づき、対象物21の3次元情報を取得する。
【0042】
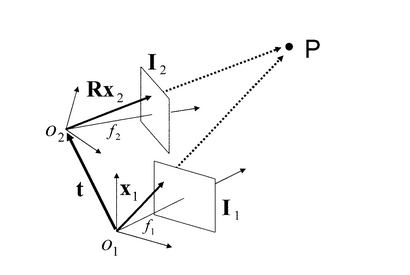
図8を参照してステレオ画像処理の原理を説明する。図8中、第1撮像装置1aの視点をO1、焦点距離をf1とし、第2撮像装置1bの視点をO2、焦点距離をf2とする。第1撮像装置1aのカメラ座標系を基準に考えると、両撮像装置1a,1bの相対的な位置関係は、回転行列Rおよび並進ベクトルtで記述される。そして、対象物21上の点P=(X,Y,Z)を第1撮像装置1aの画像I1に投影した点のベクトルをx1、点Pを第2撮像装置1bの画像I2に投影した点のベクトルをx2とすれば、点Pの3次元情報(奥行き距離Z)を[式1]より求めることができる。
【数1】

【0043】
このようにして計測された3次元情報は、表示部5に出力されたり、他の処理(画像認識処理、演算処理、検査処理等)に供される。
【0044】
以上述べた本実施形態によれば、撮像装置1a,1bから得られた画像51,52に、光学的な中心を表すマーク53,54を合成して表示したので、専門知識をもたない者であっても簡単かつ高精度に光軸の向き調整を行うことが可能となる。
【0045】
また、撮像装置ごと、焦点距離ごとに光学中心データを用意したので、撮像素子と光学系のマウントばらつきがあったとしても、高精度な調整が可能である。
【0046】
また、撮像装置ごとに別々の表示を行ったため、撮像装置1a,1bの相対的な位置関係が未定の状態でも光軸の調整を行うことができる。
【0047】
さらに、光軸の合わせ込みを厳密に行うことができることから、ステレオ画像処理の精度の向上や計算コストの削減を図ることも可能となる。
【0048】
<第2実施形態>
本発明の第2実施形態では、マークを含む部分を拡大表示する機能を追加する。その他の構成は上記実施形態のものと同様である。
【0049】
表示部5に図6の画像が表示された状態で、拡大表示機能を実行すると、画像51,52のうちマーク53,54の周囲の局所領域が拡大表示される(図9参照)。これにより、マークと対象物21上の点との位置合わせが容易になり、光軸の微調整や合わせ込みを精度良く行うことができる。
【0050】
画像の拡大をディジタル的に行う場合には、処理部3において表示画像の局所領域を補間拡大し表示すればよい。画像の拡大を光学的に行う場合には、処理部3から制御信号を送ることで撮像装置1a,1bの焦点距離を大きくすればよい。ただしこのとき、マークの表示位置の計算には、拡大前の焦点距離(ステレオ画像処理を実行する際の焦点距離)を用いなければならないことに注意する。
【0051】
<第3実施形態>
図6に示すように、対象物の形状が単純で判別しやすい場合には、マークと対象物上の点との対応をとりやすい。しかしながら、対象物の形状や模様によっては、マークを合わせ込むべき点を判別するのが難しく、第1実施形態の方法では光軸調整が困難な場合もある。
【0052】
そこで、本発明の第3実施形態では、1つの画像に複数の撮像装置に係るマークを合成表示する機能を追加する。なお、その他の構成は上記実施形態のものと同様である。
【0053】
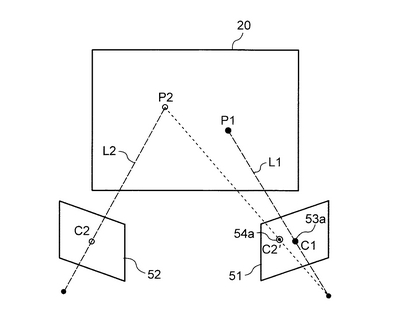
撮像装置1a,1bと基準平面20が、図10のような位置関係にある場合を考える。図中、点C1は第1画像51の光学的な中心であり、点C2は第2画像52の光学的な中心である。また、点P1は第1撮像装置1aの光軸L1と基準平面20の交点であり、点P2は第2撮像装置1bの光軸L2と基準平面20の交点である。
【0054】
処理部3は、まず撮像装置1a,1bおよび基準平面20の相対的な位置関係から、ホモグラフィー行列Hを算出する。ホモグラフィー行列Hとは、[式2]に示すように、第2画像52上の任意の点x2を基準平面20を介して第1画像51上の点x1に投影するための変換行列である。なお、撮像装置1a,1bおよび基準平面20の相対的な位置関係が未知の場合には、各撮像装置1a,1bで得られた画像から基準平面20上の像点を数点抽出することにより算出すればよい。
【数2】
【0055】
次に処理部3は、点C2の座標を[式2]を用いて変換することで、第1画像51上への投影点C2′の座標を算出し、点C2′の位置に第2マーク54aを表示する。つまり、第2マーク54aは、第2画像52の光学的な中心(点C2)に写っている像(点P2)の対応点(点C2′)に表示される。また、第1画像51の点C1の位置には第1マーク53aが合成表示される。
【0056】
第1実施形態では各画像上でマークを対象物上の同一点に合わせ込む必要があったが、本実施形態の場合には、対象物とは無関係に、第1画像51上で第1マーク53aと第2マーク54aとが重なるように各撮像装置1a,1bの向きを調整するだけでよい。したがって、より簡単に光軸調整を行うことができる。
【0057】
ここで、マークと撮像装置との関係を把握しやすくするために、第1マーク53aと第2マーク54aで色や形状を異ならせたり、マークの近くに「1」「2」など撮像装置との対応を表すテキスト情報を表示したりするとよい。
【0058】
さらに第1マーク53aと第2マーク54aの位置の相違を表すテキスト情報を表示することも好ましい。たとえば、2つのマークの画像上の距離(ズレ量)を縦方向と横方向の画素数で表示すれば、ユーザーはその表示を見ながら値が0になるよう撮像装置の向きを調整すればよくなる。あるいは、そのズレ量から撮像装置の調整方向や調整量を表示するようにしても、光軸調整に有用な情報となる。
【0059】
<第4実施形態>
次に本発明の第4実施形態について説明する。本実施形態も第3実施形態と同様、1つの画像に複数の撮像装置に係るマークを合成表示するものである。ただし、第3実施形態では第2マークが点P2の対応点C2′を表していたのに対し、第4実施形態では第2マークが第2撮像装置1bの光軸を第1画像51に投影したエピポーラ線を表す点で異なる。
【0060】
第3実施形態の方法では、光軸L1,L2の輻輳点(光軸同士が交差する点)が常に基準平面20上に設定されることになる。しかし、装置の用途や対象物の種類によっては、輻輳点を基準平面20ではなく、対象物上に設定したい場合もある。本実施形態はこのような場合に有効な方法である。
【0061】
図11に示すように、基準平面20の上に対象物(電子回路22)を配置し、その対象物上の点P3に輻輳点を設定する方法について述べる。なお、電子回路22上には複数のチップ22a〜22eが実装されており、上記点P3はチップ22bの右上の角の点であるものとする。
【0062】
まず、第2画像52を参照しながら、マーク54が点P3に重なるように第2撮像装置1bの向きを調整する。このときの第2画像52は図12の左画面のようになる。
【0063】
第3実施形態では、撮像装置1a,1bと基準平面20との距離が既知であったため、第1画像51上への投影点を算出できたが、図11の例では、点P3の高さ(撮像装置1a,1bと点P3との距離)が未知であるため、投影点を算出することができない。つまり、点Pが光軸L2上にあることはわかるものの、光軸L2上のどの位置にあるのかを特
定できないのである。
【0064】
そこで処理部3は、撮像装置1a,1bの相対的な位置関係から、Fundamental行列F
を算出する。Fundamental行列Fとは、[式3]に示すように、第1画像51上の点x1
と第2画像52上の点x2とのエピポーラ拘束を表すものである。
【数3】
【0065】
次に処理部3は、[式3]に点C2の座標を代入して、[式4]を得る。この[式4]は、第2撮像装置1bの光軸L2を第1画像51に投影したときのエピポーラ線を表す。
【数4】
【0066】
そして処理部3は、[式4]から直線状の第2マーク54bを生成し、第1画像51に合成表示する。このときの第1画像51は図12の右画面のようになる。第2マーク54bは、点P3の像点P3′を通る直線である。
【0067】
ここで、第1画像51を参照しながら、第1マーク53aが第2マーク54bと重なるように第1撮像装置1aの向きを調整すれば、光軸L1,L2の輻輳を実現できる。さらに、第1マーク53aを像点P3′に合わせ込めば、電子回路22上の点P3に輻輳点を設定することが可能である。
【0068】
電子回路22のように似たパターンが繰り返し現れる画像では、対象物上のどの部分が表示されているのかを判別しづらい。よって、第1実施形態のように対象物の画像だけを見ながら調整する場合には、点P3の像点P3′を探すのに手間取ったり、隣のチップ22cの角を像点P3′と勘違いするなどの誤操作を招くおそれがある。
【0069】
その点、本実施形態では、第2マーク54b上に像点P3′が存在することが予めわかっているので、簡単かつ正確に第1マーク53aを合わせ込むべき点を特定することができる。
【0070】
以上、第1〜第4実施形態を挙げて本発明の一具体例を説明したが、本発明の範囲は上記実施形態に限られるものではなく、その技術思想の範囲内で種々の変形が可能である。
【0071】
たとえば、上記実施形態を組み合わせてもよい。また、上記実施形態では撮像装置の向きを手動で調整することとしたが、処理部が画像及びマークの情報に基づきモータ等を駆動して撮像装置の向きを自動調整するようにしてもよい。また、撮像装置の数は2つより多くてもよい。また、本発明の3次元画像処理装置は、検査装置の他にも、3次元測定装置やコンピュータビジョンなど様々な用途に利用可能である。
【図面の簡単な説明】
【0072】
【図1】本発明の実施形態に係る3次元画像処理装置のハードウェア構成を示すブロック図。
【図2】撮像装置の設置例を示す図。
【図3】光軸調整処理の流れを示すフローチャート。
【図4】光学中心データの一例を示す図。
【図5】光学中心算出処理に用いるパターンチャートと、画像の歪みを示す図。
【図6】第1実施形態におけるマークの表示例を示す図。
【図7】撮像装置の向きの調整方法を説明する図。
【図8】ステレオ画像処理の原理を示す図。
【図9】第2実施形態における拡大表示の一例を示す図。
【図10】第3実施形態における光軸調整の原理を示す図。
【図11】第4実施形態における光軸調整の原理を示す図。
【図12】第4実施形態におけるマークの表示例を示す図。
【図13】撮像素子と光学系のマウントばらつきを示す図。
【符号の説明】
【0073】
1a 第1撮像装置
1b 第2撮像装置
2 メモリ
3 処理部
4 記憶装置
5 表示部
20 基準平面
21 対象物
22 電子回路(対象物)
51 第1画像
52 第2画像
53,54 マーク
53a 第1マーク
54a,54b 第2マーク
L1,L2 光軸
【技術分野】
【0001】
本発明は、複数の撮像装置で得られたステレオ画像から対象物の3次元情報を取得する3次元画像処理装置に関し、特に撮像装置同士の光軸の向きを調整するための技術に関する。
【背景技術】
【0002】
画像から撮像対象の3次元情報を得る手法として、所定の撮像エリアを所定間隔で配置された複数の撮像装置によって撮像し、得られた複数枚の画像上における撮像対象の結像点の各撮像装置間での対応関係を求める方法がある。この手法は一般にステレオ画像処理と呼ばれる。
【0003】
ステレオ画像処理を利用した3次元画像処理装置においては、各撮像装置の光軸を平行に設定する場合と、光軸を輻輳(交差)させる場合とがある(特許文献1参照)。後者の場合、撮像装置同士の共通視野を確保しやすいという利点があり、特に、撮像装置自体の幅よりも撮像装置間の距離を小さく設定しなければならない場面や、撮像装置と撮像対象物との距離が小さい場面などで有効である。加えて、光軸を輻輳させた場合には、(1)撮像装置間の幾何学的配置を記述するパラメータの推定精度が安定する、(2)画像中心付近に投影される対象物の視差が0に近い値になるため、視差算出の計算コストが削減できるなどのメリットもある。
【特許文献1】特開平7−175143号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
このように「輻輳」には種々の利点があるものの、現実には、光軸は目に見えるものではないため、各撮像装置の光軸の向きを調整することは非常に難しい。画像処理の専門知識をもたないユーザーならなおさらである。
【0005】
そこで特許文献1では、光軸上の注視点が撮像素子の中心に結像する(つまり光軸が撮像素子の中心と交わる)という仮定の下、画像の中心部分の相関に基づいて光軸調整を自動的に行う方法を試みている。
【0006】
しかしながら実際の撮像装置では、撮像素子と光学系のマウントばらつきにより、光軸が撮像素子の中心と交わる保障はない(図13参照)。しかも、光軸が撮像素子に交わる点(画像の光学的な中心)と撮像素子の中心(画像の中心)とのズレ量は、焦点距離を変えることで変化する可能性もある。また、画像の中心部分に特徴的な像点が含まれていない場合や、似たパターンが繰り返し現れるような画像であった場合には、画像の誤対応を生じるおそれもある。したがって、特許文献1の手法では光軸調整の精度に限界がある。
【0007】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、専門知識をもたない者であっても簡単かつ高精度に光軸の向き調整が行えるようにするための技術を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために本発明では、撮像装置(撮像手段)の光軸もしくは光軸上の注視点に相当する情報を可視像化し、その可視像を光軸の向き調整のための参照情報として利用する。
【0009】
具体的には、本発明の一態様に係る3次元画像処理装置は、複数の画像から対象物の3次元情報を取得するものであって、複数の撮像手段(撮像装置)と、前記撮像手段によって撮像される画像の光学的な中心を各撮像手段について記憶する記憶手段(記憶装置)と、前記撮像手段から得られた画像に、光学的な中心を表すマークを合成して表示する表示手段(処理部および表示部)と、を備える。
【0010】
ここで「画像の光学的な中心」とは、光軸が撮像手段の撮像素子に交わる点に対応し、「光学的な中心を表すマーク」は、光軸もしくは光軸上の注視点に相当する情報を可視像化したものに対応する。つまり、ユーザーは、表示手段に表示された画像を見ることで、撮像手段の光軸の向きを視覚的に捉えることができるのである。これにより、たとえ「画像の光学的な中心」と「画像の中心」とがずれていたとしても、各撮像手段に係るマークを参照することによって高精度に光軸の向き調整を行うことが可能となり、比較的容易に光軸の輻輳を実現できる。たとえば、手動で調整を行う場合には、各撮像手段に係るマークを参照して、全てのマークが対象物上の同一点に重なるように各撮像手段の向きを調整すればよい。もちろん、マークに基づいて処理部が自動的に撮像手段の向き調整を行うことも可能である。
【0011】
前記撮像手段が複数の焦点距離を有する場合には、各焦点距離について画像の光学的な中心を記憶手段に記憶させておくことが好ましい。焦点距離が変わると画像の光学的な中心の位置が変化する可能性があるが、撮像手段の焦点距離に応じて記憶手段から読み出す情報を適宜切り替えることで、常に適切な位置にマークを表示することができ、光軸調整の精度を向上させることができる。
【0012】
また、前記表示手段が、前記マークを含む部分を拡大表示することも好ましい。拡大画像を参照することで、光軸の向きの微調整や合わせ込みを精度良く行うことができる。
【0013】
画像およびマークの表示態様としては種々考えられる。第一に、撮像手段ごとに、マークが合成された画像を表示する態様が想定される。この場合、それぞれの画像におけるマークが対象物上の同一点に位置するように、各撮像手段の向きを調整すればよい。
【0014】
第二に、1つの画像に複数の撮像手段に係るマークを合成表示する態様が想定される。たとえば、第1撮像手段から得られた第1画像に、第1画像の光学的な中心を表す第1マークと、第2撮像手段から得られた第2画像の光学的な中心を前記第1画像上へ投影した情報を表す第2マークとを合成して表示するのである。ここで、第1画像上へ投影する第2マークは、第2画像の光学的な中心に写っている像の対応点を表すものでもよいし、第2撮像手段の光軸を第1画像に投影したエピポーラ線を表すものでもよい。
【0015】
また、第1マークと第2マークの位置の相違を表示することも好ましい。たとえば、画像上の距離を表示したり、撮像手段の調整量を表示したりすれば、光軸調整に有用な情報となる。
【0016】
なお、本発明は、上記手段の少なくとも一部を有する3次元画像処理装置として捉えることができるし、また、その装置を用いた光軸調整方法、または、処理部(処理装置)が実行する光軸調整支援方法もしくはプログラムとして捉えることもできる。
【0017】
すなわち、本発明の一態様に係る光軸調整方法は、複数の撮像装置の光軸の向きを調整する光軸調整方法であって、撮像装置で対象物を撮像し、その画像に光学的な中心を表すマークを合成して表示し、各撮像装置に係るマークを参照して、全てのマークが前記対象物上の同一点に重なるように各撮像装置の向きを調整するものである。
【0018】
また、本発明の一態様に係る光軸調整支援方法は、複数の撮像装置と、前記撮像装置によって撮像される画像の光学的な中心を各撮像装置について記憶する記憶装置と、表示部と、が接続された処理装置が、前記撮像装置から画像を取得し、前記記憶装置から光学的な中心を読み込み、各撮像装置の光軸の向き調整を支援するために、前記画像と前記光学的な中心を表すマークとを前記表示部に合成表示するものである。
【0019】
また、本発明の一態様に係るプログラムは、複数の撮像装置と、前記撮像装置によって撮像される画像の光学的な中心を各撮像装置について記憶する記憶装置と、表示部と、が接続された処理装置に、前記撮像装置から画像を取得し、前記記憶装置から光学的な中心を読み込み、各撮像装置の光軸の向き調整を支援するために、前記画像と前記光学的な中心を表すマークとを前記表示部に合成表示する処理を実行させるものである。
【発明の効果】
【0020】
本発明によれば、専門知識をもたない者であっても簡単かつ高精度に光軸の向き調整を行うことができる。
【発明を実施するための最良の形態】
【0021】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0022】
<第1実施形態>
(3次元画像処理装置の構成)
図1は、本発明の実施形態に係る3次元画像処理装置のハードウェア構成を示すブロック図である。3次元画像処理装置は、概略、第1撮像装置1a、第2撮像装置1b、各撮像装置用のメモリ2,2、処理部3、記憶装置4、表示部5を備えて構成される。
【0023】
第1撮像装置1a、第2撮像装置1b(以下、単に「撮像装置」とも呼ぶ。)は、複数のレンズから構成される光学系と、CCDもしくはCMOSなどから構成される撮像素子とを備える撮像手段である。撮像装置1a,1bで得られたディジタル画像はメモリ2に一時的に格納された後、処理部3に入力される。なお、撮像装置1a,1bで取得する画像はカラーでもモノクロでもよく、その解像度等のスペックも撮像対象や装置の用途に応じて適宜選択すればよい。
【0024】
処理部3は、CPU(中央演算処理装置)、RAM、ROM、I/Fなどから構成されるコンピュータであり、ROMもしくは記憶装置4から読み込むプログラムに従って後述する各種の演算処理、制御処理、画像処理等を実行する部分である。
【0025】
記憶装置4は、ディジタルデータ(プログラム含む)を記憶する記憶手段であって、たとえば、磁気ディスク、フラッシュメモリ、光ディスク、または、光磁気ディスクなどで構成される。記憶装置4には、処理部3で実行されるプログラムの他、ステレオ画像処理の際に参照されるパラメータ(第1撮像装置1aと第2撮像装置1bの相対的な位置関係など)、光軸の向き調整の際に参照されるデータ(画像の光学的な中心など)が格納されている。
【0026】
表示部5は、処理部3で生成された表示データを表示する部分であり、ステレオ画像処理の結果、撮像装置1a,1bで撮像した画像、光軸の向き調整用の画像などが出力される。本実施形態では、処理部3と表示部5が本発明の表示手段に対応する。
【0027】
(撮像装置の光軸調整)
図2は、撮像装置1a,1bの設置例を示している。図2のように、2つの撮像装置1a,1bは、基準平面20上に配置された対象物21を異なる角度から撮影できるような
態様で設置される。
【0028】
本実施形態の撮像装置1a,1bは、上下、左右、前後の3軸の平行移動と、各軸周りの回転の6自由度を有する機構を備えている(6自由度のうちのいくつかを拘束することで、光軸調整を容易化してもよい。)。各撮像装置1a,1bの向き(光軸の向き)および撮像装置−対象物間距離は、ステレオ画像処理に先立って、装置の用途、対象物21の大きさや種類等に応じて適宜調整が行われる。
【0029】
たとえば、3次元画像処理装置を工業製品(電子部品等)の検査装置に応用するのであれば、対象物21が比較的小さいため、撮像装置間の距離および撮像装置−対象物間の距離は十数cm〜数十cm程度が望ましい。そうすると、設置上の物理的な制約から、共通視野を確保するために2つの撮像装置1a,1bの光軸を輻輳させる必要がでる。また、電子部品等の検査にあっては、ミリオーダーからミクロンオーダーの検査精度が要求されることがあり、そのような要求精度に応えるためには光軸の向きを厳密に設定できなければならない。
【0030】
そこで、本実施形態では図3に示す方法により光軸の向き調整を行う。
【0031】
装置を光軸調整モードに切り替えると、処理部3が図3の処理を開始する。まず、処理部3は、記憶装置4に各撮像装置1a,1bの画像の光学的な中心を表すデータ(以下、「光学中心データ」と呼ぶ。)が登録されているか否か調べ、登録されている場合には(ステップS1;YES)、そのデータを読み込む(ステップS2)。
【0032】
光学中心データは、撮像装置1a,1bの光軸が撮像素子に交わる点の座標値を表すデータであり、第1撮像装置1a用のものと第2撮像装置1b用のものの両方が登録されている。また、撮像装置1a,1bの光学系がズーム機構を有する場合、つまり複数の焦点距離を有する場合には、焦点距離ごとに座標値が格納されている。ただし、焦点距離を変えても光学的な中心がほとんど変化しないならば、単一の座標値でも構わない。
【0033】
図4は、本実施形態における光学中心データの例を示している。本例では、焦点距離A〜Cについて、カメラ座標系(画像上の座標系)における画素単位の座標値(x,y)が登録されている。このような形式の座標値を用いることで、後段の画像合成の計算を簡易化できる。
【0034】
ところで、光学中心データが未登録の場合には(ステップS1;NO)、次のようにして光学中心を算出する(ステップS3)。図5(a)に示す格子状のパターンチャートを基準平面20上に置き、そのチャートを撮像装置で正面から撮影すると、画像上では、図5(b)に示すように、光学系の収差の影響により格子に歪みが生じる。ただし、図5(b)は説明のために格子の歪みを極端に表している。格子の歪みは光軸からの距離に応じて大きくなることが知られているため、格子上の各点の歪み量を解析することで光軸の位置(画像の光学的な中心)を逆算可能である。この推定処理を撮像装置ごと、焦点距離ごとに繰り返して、光学中心データを生成する。なお、光学的な中心を求める手法については他にも種々のものが提案されており、そのいずれを採用しても構わない。
【0035】
次に、処理部3は、第1撮像装置1aで撮像された第1画像をメモリ2から取得するとともに(ステップS4)、ステップS2で読み込んだ第1撮像装置1a用の光学中心データの中から第1撮像装置1aの焦点距離に対応した座標値を選択し、その座標に表示するためのマークを生成する(ステップS5)。また、同様にして、第2撮像装置1aについても第2画像の取得とマークの生成を行う(ステップS4,S5)。
【0036】
そして、図6に示すように、第1画像51と第2画像52を表示部5に並べて表示し、それぞれの画像にマーク53,54を合成して表示する。つまり本実施形態では、撮像装置1a,1bごとにマークが合成された画像を表示する。
【0037】
マークの形状や色などは、ユーザーによる識別が容易なものが好ましい。たとえば、図6に例示したように中心座標上に丸形状や多角形状のカーソルを表示してもよいし、中心座標でクロスする十字カーソルを表示してもよい。また、色に関していえば、原色や蛍光色などの目立つ色で表示したり、基準平面20や対象物21が有さない色で表示したり、画像に対してXOR表示したりすればよい。
【0038】
これらのマークは光軸を可視像化したものに相当する。ユーザーは、表示部5に表示された画像およびマークを見ることで、各撮像装置1a,1bの光軸の向きを視覚的に捉えることができ、所望の位置からのズレ量や調整方向および調整量などを直感的に把握することができる。また、撮像装置1a,1bの向きを動かすたびにステップS4〜S6の処理が繰り返され(ステップS7;NO)、表示部5の表示画像がリアルタイムに更新されるため、光軸向きの微調整も容易である。
【0039】
たとえば、対象物21の右上の角の点21aにおいて光軸を交差させたい場合には、次のように調整すればよい。まず第1画像51を参照しながら、マーク53が点21aに重なるように第1撮像装置1aの向きを調整し(図7の右画面)、次いで第2画像52を参照しながら、マーク54も点21aに重なるように第2撮像装置1bの向きを調整する(図7の左画面)。両方のマークが対象物上の同一点21aに重なったら、光軸調整モードを終了する(ステップS7;YES)。これにより光軸の輻輳を実現できる。
【0040】
(ステレオ画像処理)
以上のように光軸調整が完了した後は、第1撮像装置1aと第2撮像装置1bの相対的な位置関係を表すパラメータが再設定され、ステレオ画像処理の準備が整う。
【0041】
ステレオ画像処理モードでは、処理部3が、各撮像装置1a,1bから画像を取得し、それぞれの画像における対象物21の結像点の対応関係に基づき、対象物21の3次元情報を取得する。
【0042】
図8を参照してステレオ画像処理の原理を説明する。図8中、第1撮像装置1aの視点をO1、焦点距離をf1とし、第2撮像装置1bの視点をO2、焦点距離をf2とする。第1撮像装置1aのカメラ座標系を基準に考えると、両撮像装置1a,1bの相対的な位置関係は、回転行列Rおよび並進ベクトルtで記述される。そして、対象物21上の点P=(X,Y,Z)を第1撮像装置1aの画像I1に投影した点のベクトルをx1、点Pを第2撮像装置1bの画像I2に投影した点のベクトルをx2とすれば、点Pの3次元情報(奥行き距離Z)を[式1]より求めることができる。
【数1】
【0043】
このようにして計測された3次元情報は、表示部5に出力されたり、他の処理(画像認識処理、演算処理、検査処理等)に供される。
【0044】
以上述べた本実施形態によれば、撮像装置1a,1bから得られた画像51,52に、光学的な中心を表すマーク53,54を合成して表示したので、専門知識をもたない者であっても簡単かつ高精度に光軸の向き調整を行うことが可能となる。
【0045】
また、撮像装置ごと、焦点距離ごとに光学中心データを用意したので、撮像素子と光学系のマウントばらつきがあったとしても、高精度な調整が可能である。
【0046】
また、撮像装置ごとに別々の表示を行ったため、撮像装置1a,1bの相対的な位置関係が未定の状態でも光軸の調整を行うことができる。
【0047】
さらに、光軸の合わせ込みを厳密に行うことができることから、ステレオ画像処理の精度の向上や計算コストの削減を図ることも可能となる。
【0048】
<第2実施形態>
本発明の第2実施形態では、マークを含む部分を拡大表示する機能を追加する。その他の構成は上記実施形態のものと同様である。
【0049】
表示部5に図6の画像が表示された状態で、拡大表示機能を実行すると、画像51,52のうちマーク53,54の周囲の局所領域が拡大表示される(図9参照)。これにより、マークと対象物21上の点との位置合わせが容易になり、光軸の微調整や合わせ込みを精度良く行うことができる。
【0050】
画像の拡大をディジタル的に行う場合には、処理部3において表示画像の局所領域を補間拡大し表示すればよい。画像の拡大を光学的に行う場合には、処理部3から制御信号を送ることで撮像装置1a,1bの焦点距離を大きくすればよい。ただしこのとき、マークの表示位置の計算には、拡大前の焦点距離(ステレオ画像処理を実行する際の焦点距離)を用いなければならないことに注意する。
【0051】
<第3実施形態>
図6に示すように、対象物の形状が単純で判別しやすい場合には、マークと対象物上の点との対応をとりやすい。しかしながら、対象物の形状や模様によっては、マークを合わせ込むべき点を判別するのが難しく、第1実施形態の方法では光軸調整が困難な場合もある。
【0052】
そこで、本発明の第3実施形態では、1つの画像に複数の撮像装置に係るマークを合成表示する機能を追加する。なお、その他の構成は上記実施形態のものと同様である。
【0053】
撮像装置1a,1bと基準平面20が、図10のような位置関係にある場合を考える。図中、点C1は第1画像51の光学的な中心であり、点C2は第2画像52の光学的な中心である。また、点P1は第1撮像装置1aの光軸L1と基準平面20の交点であり、点P2は第2撮像装置1bの光軸L2と基準平面20の交点である。
【0054】
処理部3は、まず撮像装置1a,1bおよび基準平面20の相対的な位置関係から、ホモグラフィー行列Hを算出する。ホモグラフィー行列Hとは、[式2]に示すように、第2画像52上の任意の点x2を基準平面20を介して第1画像51上の点x1に投影するための変換行列である。なお、撮像装置1a,1bおよび基準平面20の相対的な位置関係が未知の場合には、各撮像装置1a,1bで得られた画像から基準平面20上の像点を数点抽出することにより算出すればよい。
【数2】
【0055】
次に処理部3は、点C2の座標を[式2]を用いて変換することで、第1画像51上への投影点C2′の座標を算出し、点C2′の位置に第2マーク54aを表示する。つまり、第2マーク54aは、第2画像52の光学的な中心(点C2)に写っている像(点P2)の対応点(点C2′)に表示される。また、第1画像51の点C1の位置には第1マーク53aが合成表示される。
【0056】
第1実施形態では各画像上でマークを対象物上の同一点に合わせ込む必要があったが、本実施形態の場合には、対象物とは無関係に、第1画像51上で第1マーク53aと第2マーク54aとが重なるように各撮像装置1a,1bの向きを調整するだけでよい。したがって、より簡単に光軸調整を行うことができる。
【0057】
ここで、マークと撮像装置との関係を把握しやすくするために、第1マーク53aと第2マーク54aで色や形状を異ならせたり、マークの近くに「1」「2」など撮像装置との対応を表すテキスト情報を表示したりするとよい。
【0058】
さらに第1マーク53aと第2マーク54aの位置の相違を表すテキスト情報を表示することも好ましい。たとえば、2つのマークの画像上の距離(ズレ量)を縦方向と横方向の画素数で表示すれば、ユーザーはその表示を見ながら値が0になるよう撮像装置の向きを調整すればよくなる。あるいは、そのズレ量から撮像装置の調整方向や調整量を表示するようにしても、光軸調整に有用な情報となる。
【0059】
<第4実施形態>
次に本発明の第4実施形態について説明する。本実施形態も第3実施形態と同様、1つの画像に複数の撮像装置に係るマークを合成表示するものである。ただし、第3実施形態では第2マークが点P2の対応点C2′を表していたのに対し、第4実施形態では第2マークが第2撮像装置1bの光軸を第1画像51に投影したエピポーラ線を表す点で異なる。
【0060】
第3実施形態の方法では、光軸L1,L2の輻輳点(光軸同士が交差する点)が常に基準平面20上に設定されることになる。しかし、装置の用途や対象物の種類によっては、輻輳点を基準平面20ではなく、対象物上に設定したい場合もある。本実施形態はこのような場合に有効な方法である。
【0061】
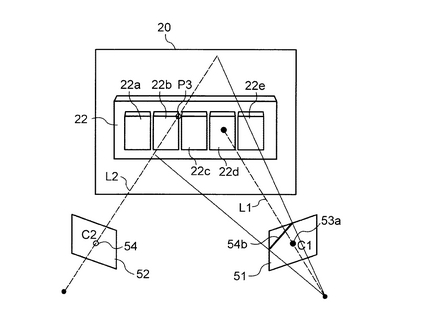
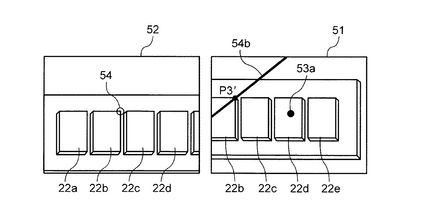
図11に示すように、基準平面20の上に対象物(電子回路22)を配置し、その対象物上の点P3に輻輳点を設定する方法について述べる。なお、電子回路22上には複数のチップ22a〜22eが実装されており、上記点P3はチップ22bの右上の角の点であるものとする。
【0062】
まず、第2画像52を参照しながら、マーク54が点P3に重なるように第2撮像装置1bの向きを調整する。このときの第2画像52は図12の左画面のようになる。
【0063】
第3実施形態では、撮像装置1a,1bと基準平面20との距離が既知であったため、第1画像51上への投影点を算出できたが、図11の例では、点P3の高さ(撮像装置1a,1bと点P3との距離)が未知であるため、投影点を算出することができない。つまり、点Pが光軸L2上にあることはわかるものの、光軸L2上のどの位置にあるのかを特
定できないのである。
【0064】
そこで処理部3は、撮像装置1a,1bの相対的な位置関係から、Fundamental行列F
を算出する。Fundamental行列Fとは、[式3]に示すように、第1画像51上の点x1
と第2画像52上の点x2とのエピポーラ拘束を表すものである。
【数3】
【0065】
次に処理部3は、[式3]に点C2の座標を代入して、[式4]を得る。この[式4]は、第2撮像装置1bの光軸L2を第1画像51に投影したときのエピポーラ線を表す。
【数4】
【0066】
そして処理部3は、[式4]から直線状の第2マーク54bを生成し、第1画像51に合成表示する。このときの第1画像51は図12の右画面のようになる。第2マーク54bは、点P3の像点P3′を通る直線である。
【0067】
ここで、第1画像51を参照しながら、第1マーク53aが第2マーク54bと重なるように第1撮像装置1aの向きを調整すれば、光軸L1,L2の輻輳を実現できる。さらに、第1マーク53aを像点P3′に合わせ込めば、電子回路22上の点P3に輻輳点を設定することが可能である。
【0068】
電子回路22のように似たパターンが繰り返し現れる画像では、対象物上のどの部分が表示されているのかを判別しづらい。よって、第1実施形態のように対象物の画像だけを見ながら調整する場合には、点P3の像点P3′を探すのに手間取ったり、隣のチップ22cの角を像点P3′と勘違いするなどの誤操作を招くおそれがある。
【0069】
その点、本実施形態では、第2マーク54b上に像点P3′が存在することが予めわかっているので、簡単かつ正確に第1マーク53aを合わせ込むべき点を特定することができる。
【0070】
以上、第1〜第4実施形態を挙げて本発明の一具体例を説明したが、本発明の範囲は上記実施形態に限られるものではなく、その技術思想の範囲内で種々の変形が可能である。
【0071】
たとえば、上記実施形態を組み合わせてもよい。また、上記実施形態では撮像装置の向きを手動で調整することとしたが、処理部が画像及びマークの情報に基づきモータ等を駆動して撮像装置の向きを自動調整するようにしてもよい。また、撮像装置の数は2つより多くてもよい。また、本発明の3次元画像処理装置は、検査装置の他にも、3次元測定装置やコンピュータビジョンなど様々な用途に利用可能である。
【図面の簡単な説明】
【0072】
【図1】本発明の実施形態に係る3次元画像処理装置のハードウェア構成を示すブロック図。
【図2】撮像装置の設置例を示す図。
【図3】光軸調整処理の流れを示すフローチャート。
【図4】光学中心データの一例を示す図。
【図5】光学中心算出処理に用いるパターンチャートと、画像の歪みを示す図。
【図6】第1実施形態におけるマークの表示例を示す図。
【図7】撮像装置の向きの調整方法を説明する図。
【図8】ステレオ画像処理の原理を示す図。
【図9】第2実施形態における拡大表示の一例を示す図。
【図10】第3実施形態における光軸調整の原理を示す図。
【図11】第4実施形態における光軸調整の原理を示す図。
【図12】第4実施形態におけるマークの表示例を示す図。
【図13】撮像素子と光学系のマウントばらつきを示す図。
【符号の説明】
【0073】
1a 第1撮像装置
1b 第2撮像装置
2 メモリ
3 処理部
4 記憶装置
5 表示部
20 基準平面
21 対象物
22 電子回路(対象物)
51 第1画像
52 第2画像
53,54 マーク
53a 第1マーク
54a,54b 第2マーク
L1,L2 光軸
【特許請求の範囲】
【請求項1】
複数の画像から対象物の3次元情報を取得する3次元画像処理装置であって、
複数の撮像手段と、
前記撮像手段によって撮像される画像の光学的な中心を各撮像手段について記憶する記憶手段と、
前記撮像手段から得られた画像に、光学的な中心を表すマークを合成して表示する表示手段と、
を備える3次元画像処理装置。
【請求項2】
前記撮像手段は、複数の焦点距離を有し、
前記記憶手段は、各焦点距離について画像の光学的な中心を記憶している
請求項1記載の3次元画像処理装置。
【請求項3】
前記表示手段は、前記マークを含む部分を拡大表示する
請求項1または2記載の3次元画像処理装置。
【請求項4】
前記表示手段は、撮像手段ごとに、マークが合成された画像を表示する
請求項1〜3のうちいずれか1項記載の3次元画像処理装置。
【請求項5】
前記表示手段は、1つの画像に複数の撮像手段に係るマークを合成表示する
請求項1〜3のうちいずれか1項記載の3次元画像処理装置。
【請求項6】
前記表示手段は、第1撮像手段から得られた第1画像に、第1画像の光学的な中心を表す第1マークと、第2撮像手段から得られた第2画像の光学的な中心を前記第1画像上へ投影した情報を表す第2マークとを合成して表示する
請求項5記載の3次元画像処理装置。
【請求項7】
前記第2マークは、前記第2画像の光学的な中心に写っている像の対応点を表す
請求項6記載の3次元画像処理装置。
【請求項8】
前記第2マークは、前記第2撮像手段の光軸を前記第1画像に投影したエピポーラ線を表す
請求項6記載の3次元画像処理装置。
【請求項9】
前記表示手段は、前記第1マークと前記第2マークの位置の相違を表示する
請求項6〜8のうちいずれか1項記載の3次元画像処理装置。
【請求項10】
複数の撮像装置の光軸の向きを調整する光軸調整方法であって、
撮像装置で対象物を撮像し、
その画像に光学的な中心を表すマークを合成して表示し、
各撮像装置に係るマークを参照して、全てのマークが前記対象物上の同一点に重なるように各撮像装置の向きを調整する
光軸調整方法。
【請求項11】
複数の撮像装置と、前記撮像装置によって撮像される画像の光学的な中心を各撮像装置について記憶する記憶装置と、表示部と、が接続された処理装置が、
前記撮像装置から画像を取得し、
前記記憶装置から光学的な中心を読み込み、
各撮像装置の光軸の向き調整を支援するために、前記画像と前記光学的な中心を表すマ
ークとを前記表示部に合成表示する
光軸調整支援方法。
【請求項1】
複数の画像から対象物の3次元情報を取得する3次元画像処理装置であって、
複数の撮像手段と、
前記撮像手段によって撮像される画像の光学的な中心を各撮像手段について記憶する記憶手段と、
前記撮像手段から得られた画像に、光学的な中心を表すマークを合成して表示する表示手段と、
を備える3次元画像処理装置。
【請求項2】
前記撮像手段は、複数の焦点距離を有し、
前記記憶手段は、各焦点距離について画像の光学的な中心を記憶している
請求項1記載の3次元画像処理装置。
【請求項3】
前記表示手段は、前記マークを含む部分を拡大表示する
請求項1または2記載の3次元画像処理装置。
【請求項4】
前記表示手段は、撮像手段ごとに、マークが合成された画像を表示する
請求項1〜3のうちいずれか1項記載の3次元画像処理装置。
【請求項5】
前記表示手段は、1つの画像に複数の撮像手段に係るマークを合成表示する
請求項1〜3のうちいずれか1項記載の3次元画像処理装置。
【請求項6】
前記表示手段は、第1撮像手段から得られた第1画像に、第1画像の光学的な中心を表す第1マークと、第2撮像手段から得られた第2画像の光学的な中心を前記第1画像上へ投影した情報を表す第2マークとを合成して表示する
請求項5記載の3次元画像処理装置。
【請求項7】
前記第2マークは、前記第2画像の光学的な中心に写っている像の対応点を表す
請求項6記載の3次元画像処理装置。
【請求項8】
前記第2マークは、前記第2撮像手段の光軸を前記第1画像に投影したエピポーラ線を表す
請求項6記載の3次元画像処理装置。
【請求項9】
前記表示手段は、前記第1マークと前記第2マークの位置の相違を表示する
請求項6〜8のうちいずれか1項記載の3次元画像処理装置。
【請求項10】
複数の撮像装置の光軸の向きを調整する光軸調整方法であって、
撮像装置で対象物を撮像し、
その画像に光学的な中心を表すマークを合成して表示し、
各撮像装置に係るマークを参照して、全てのマークが前記対象物上の同一点に重なるように各撮像装置の向きを調整する
光軸調整方法。
【請求項11】
複数の撮像装置と、前記撮像装置によって撮像される画像の光学的な中心を各撮像装置について記憶する記憶装置と、表示部と、が接続された処理装置が、
前記撮像装置から画像を取得し、
前記記憶装置から光学的な中心を読み込み、
各撮像装置の光軸の向き調整を支援するために、前記画像と前記光学的な中心を表すマ
ークとを前記表示部に合成表示する
光軸調整支援方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2006−17632(P2006−17632A)
【公開日】平成18年1月19日(2006.1.19)
【国際特許分類】
【出願番号】特願2004−197061(P2004−197061)
【出願日】平成16年7月2日(2004.7.2)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成18年1月19日(2006.1.19)
【国際特許分類】
【出願日】平成16年7月2日(2004.7.2)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]