
3次元画像化方法およびX線断層撮像装置
【課題】しきい値とベースラインとの関係による影響を受けることなく、対象物の境界面を常に正確に表すことのできる3次元画像化方法と、その方法を利用したX線断層雑像装置を提供する。
【解決手段】対象物Wのボリュームデータを構成するボクセルから、あらかじめ設定されているしきい値を用いて一定濃度の境界を表現するポリゴンデータを生成した後、その各ポリゴンの各頂点について、当該頂点を通り、かつ、その近傍の物体境界面の法線方向への軸に沿って、その軸の両側所定領域の濃度値を積算して得られるプロファイルを微分することによって得られるピーク値の座標を求め、その座標を当該頂点の座標として、各ポリゴンの各頂点座標を補正することで、しきい値に依存することなく正確に対象物の3次元画像を得る。
【解決手段】対象物Wのボリュームデータを構成するボクセルから、あらかじめ設定されているしきい値を用いて一定濃度の境界を表現するポリゴンデータを生成した後、その各ポリゴンの各頂点について、当該頂点を通り、かつ、その近傍の物体境界面の法線方向への軸に沿って、その軸の両側所定領域の濃度値を積算して得られるプロファイルを微分することによって得られるピーク値の座標を求め、その座標を当該頂点の座標として、各ポリゴンの各頂点座標を補正することで、しきい値に依存することなく正確に対象物の3次元画像を得る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、対象物のボリュームデータから、その対象物の3次元画像を生成する方法と、その3次元画像化方法を利用したX線断層撮像装置に関する。
【背景技術】
【0002】
X線断層撮像装置や3次元形状計測装置等において、撮像もしくは計測した対象物のボリュームデータを用いたレンダリングの手法として、従来、マーチンキューブス法と称される手法が多用されている。
【0003】
マーチンキューブス法は、図6に示すように、ボリュームデータを構成する各ボクセルの立方体の重心位置に、当該ボクセルの濃度値を持つ点要素が存在するものとし、互いに隣接する8点の点要素v1〜v8でキューブを形成し、その各キューブの各辺について、あらかじめ設定されているしきい値を用いて、各点要素を内側と外側に分けるように、両側の点要素の濃度値に比例する位置に補間点pを定め、各辺の補間点pを接続してポリゴンPを形成し、このポリゴンPの集合によって対象物の表面等の境界面を構築する(例えば非特許文献1)。
【非特許文献1】Ugai laboratory Homepage, セミナー 第9回 「マーチンキューブス法」、[online] 、[平成19年3月28日検索]、インターネット<URL;http://wsim.cs.ehime-u.ac.jp/study/seminar/seminar9.html>
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、マーチンキューブス法においては、しきい値を一律に決めると、特にX線断層撮像装置による撮像結果をボリュームデータとしてレンダリングを行ったとき、正確に対象物の境界面を決められないという問題がある。これは、対象物の材質や形状に依存してベースラインが変化するのがその理由である。その結果として、得られるポリゴンも誤差を含んだものとなる。
【0005】
本発明はこのような実情に鑑みてなされたもので、しきい値とベースラインとの関係による影響を受けることなく、対象物の境界面を常に正確に表すことのできる3次元画像化方法と、その方法を利用したX線断層撮像装置の提供をその課題としている。
【課題を解決するための手段】
【0006】
上記の課題を解決するため、本発明の3次元画像化方法は、対象物のボリュームデータを構成するボクセルから、あらかじめ設定されているしきい値を用いて一定濃度の境界を表現するポリゴンデータを生成した後、その各ポリゴンの各頂点について、当該頂点を通り、かつ、その近傍の物体境界面の法線方向への軸に沿って、その軸の両側所定領域の濃度値を積算して得られるプロファイルを微分することによって得られるピーク値の座標を求め、その座標を当該頂点の座標として、各ポリゴンの各頂点座標を補正することによって特徴付けられる(請求項1)。
【0007】
ここで、本発明の3次元画像化方法においては、上記プロファイルを求める際に用いる濃度値が、上記ボリュームデータを構成する当初のボクセルの濃度値を、上記法線方向に平行な方向を含む互いに直交する3軸方向に並ぶボクセルの濃度値に置換したものであって、置換後の各ボクセルの濃度値は、置換後のボクセル内での当初の各ボクセルの占拠率に基づいて当初ボクセルの濃度値を重み付け演算を行って求める構成(請求項2)を好適に採用することができる。
【0008】
また、本発明の3次元画像化方法においては、上記各頂点についての上記軸に沿ったプロファイルを求めるに当たっての上記軸の両側所定領域を、当該領域の物体境界面の形状に基づき、コーナーもしくはエッジである場合には狭くして上記プロファイルを求める構成(請求項3)を採用することが望ましい。
【0009】
一方、本発明のX線断層撮像装置は、互いに対向するX線発生装置とX線検出装置の間に、対象物を搭載するテーブルが配置され、そのテーブルを上記X線発生装置とX線検出装置とを結ぶ線に直交する回転軸を中心として回転させるか、もしくは上記X線発生装置とX線検出装置の対を上記回転軸の回りに回転させ、所定角度の回転ごとに採取した対象物のX線透過データを用いて、対象物の内部構造を画像化する3次元画像化手段を備えたX線断層像撮影装置において、上記3次元画像化手段は、上記X線透過データを対象物のボリュームデータとして、請求項1、2または3に記載の3次元画像化方法に基づく演算により対象物の内部構造を画像化することによって特徴付けられる(請求項4)。
【0010】
本発明は、一旦マーチンキューブ法に基づくレンダリングによってポリゴンデータを生成した後、そのポリゴンの各頂点を、当該各頂点における対象物の境界面の法線方向へのプロファイルのピーク値の位置情報に基づいて修正することよって、課題を解決しようとするものである。
【0011】
すなわち、本発明においては、既存の技術によりポリゴンデータを生成した後、その全てのポリゴンの全頂点について、頂点を通り、かつ、その近傍の物体境界面の法線方向への軸に沿って、その軸の両側にあらかじめ設定されている領域の濃度値を積算してプロファイルを求め、そのプロファイルを微分してそのピーク値の座標を求める。この軸に沿ったプロファイルは、対象物の境界面において最大の濃度値変化を示し、このプロファイルを微分して得られるピーク値の位置は、従って、対象物の境界面の位置と一致する。このようにして求められた対象物の境界面は、しきい値を用いることなく求められるものであって、該当のポリゴン頂点を上記のプロファイルのピーク値の位置へと移動させることを、全ポリゴンの全頂点について行うことにより、しきい値に依存しない正確な境界面の3次元画像化を実現することができる。
【0012】
ここで、プロファイルの計算に寄与する領域を常に一定にしていると、ポリゴンの頂点が対象物のコーナーやエッジなど、曲率の小さい領域に存在している場合には、形状をなまらせる可能性がある。請求項3に係る発明は、この点を解消するものであり、コーナーやエッジの近傍に位置するポリゴン頂点の法線方向への軸のプロファイルの計算に当たっては、計算に寄与する領域を狭くすることにより、コーナーやエッジ形状の鈍化を少なくすることができる。
【0013】
請求項4に係る発明のX線断層撮像装置は、CT撮影により採取された対象物のX線透過データに基づくボリュームデータを基に、既存技術でポリゴンデータを作成した後、上記の方法によって全てのポリゴンの全頂点の位置を修正することにより、一定のしきい値を用いて、対象物の材質や形状によるベースラインの変化があっても、これらの要因に影響されることなく、常により正確に対象物の境界面を画像化することが可能となる。
【発明の効果】
【0014】
本発明によれば、しきい値を一律に決めても、ポリゴンデータの生成後に、しきい値と無関係な計算によって各ポリゴンの各頂点が修正されることになり、従来のマーチンキューブス法による3次元画像に比して、対象物の実際の境界面に近い3次元画像を得ることができる。
【0015】
また、このX線断層撮像装置の3次元画像化機能にこの方法を適用すれば、対象物の材質や形状に起因するベースラインの変化があって、X線透過データにおける各ボクセルのCT値に一貫性が欠落しても、あらかじめ設定しているしきい値に関わりなく、対象物の境界面を正確に表した3次元画像を得ることが可能となる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照しつつ本発明の実施の形態について説明する。
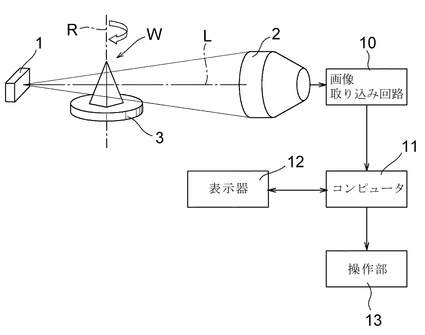
図1は本発明の実施の形態の構成図で、機械的構成を表す模式図とシステム構成を表すブロック図とを併記して示す図である。
【0017】
X線発生装置1に対向してX線検出器2が配置されており、これらの間に、対象物Wを搭載するための回転テーブル3が配置されている。X線発生装置1はコーン状のX線を発生し、X線検出器2は2次元検出器である。また、回転テーブル3は、X線発生装置1とX線検出器2を繋ぐX線光軸Lに直交する鉛直の回転軸Rの回りに回転する。
【0018】
X線検出器2の出力は、画像データ取り込み回路10を介してコンピュータ11に取り込まれる。コンピュータ11には、対象物Wの3次元画像等を表示するための表示器12と、後述するしきい値を設定したり、あるいは各種指令を与えるためのキーボードやマウス、ジョイスティック等からなる操作部13が接続されている。
【0019】
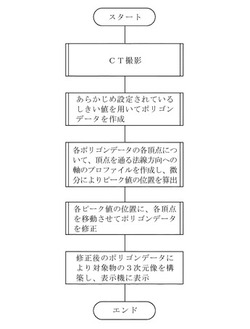
CT撮影から3次元画像の構築までの手順を図2にフローチャートで示す。まず、CT撮影に際しては、回転テーブル3上に対象物Wを搭載した状態で、X線を照射しつつ、回転テーブル3を所定の微小角度ずつ回転させ、その回転ごとにX線検出器2の出力、換言すれば対象物WのX線透過データを取り込んで記憶する。360°分のデータを取り込んだ後、コンピュータ11は、そのX線透過データを用いて対象物Wの3次元像を以下の手法によって構築する。
【0020】
まず、取り込んだX線透過データをボリュームデータとして、マーチンキューブス法等の公知の手法によりしきい値を用いた演算によってポリゴンデータを生成する。次に、その全てのポリゴンデータの全頂点について、頂点を通る法線方向への軸のプロファイルを計算し、そのプロファイルを微分することによってピーク値の位置を求め、頂点の位置をピーク値の位置に移動させ、ポリゴンデータを修正する。修正後のポリゴンデータにより、対象物Wの3次元像を構築し、表示器12に表示する。
【0021】
以下、ポリゴンの頂点の修正方法について、図3〜図5を参照しつつ詳述する。
図3(A)は、CT撮影により得られた対象物WのX線透過データをボリュームデータとして用い、公知のマーチンキューブス法によって得られたポリゴンの頂点の例を示す部分図であり、頂点はプロットp1〜p4で示している。なお、説明の簡素化のために、図3では2次元で表現しているが、実際には3次元データを取り扱う。
【0022】
図3(A)においてp2で示される頂点を修正する手法について説明する。
頂点p2の近傍の平面を定義し、頂点p2を通る法線を求める。平面を定義するためのある一定の広がりは、パラメータとしてあらかじめ設定しておく。次に、図3(B)に示すように、この法線ベクトルNを基に、マトリックスa(i,j)を設ける。このマトリックスは、法線ベクトルNの方向を含む互いに直交する3軸方向に沿ったものとし、図3(B)ではjの方向が法線ベクトルNの方向と平行である。また、頂点p2を含むマトリックスをa(0,0)とし、i方向で右向きは+、左向きを−とし、j方向で上向きを+、下向きを−とする。また、p2の修正のための計算範囲を定めておく。ここでは、−3≦i≦3,−3≦j≦3とする。
【0023】
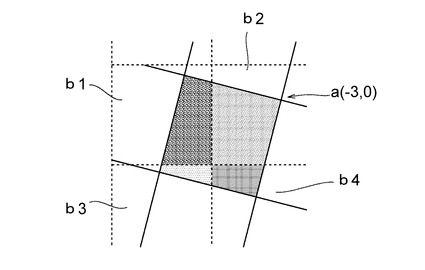
マトリックスa(i,j)に、CT撮影により得られたボクセルの濃度値(CT値)を割り当てる。その割り当ては、マトリックスa(i,j)内の当初ボクセルの占有率によって重み付け加算を行う。例えばa(−3,0)について述べると、図4に拡大図を示すように、a(−3,0)は、CT撮影により得られている当初のボクセル(図4において破線で示す)の4個、つまりb1〜b4に跨がっている。その占有率をそれぞれr1,r2,r3,r4とし、各当初ボクセルb1〜b4の濃度値(CT値)をそれぞれS(b1)、S(b2)、S(b3)、S(b4)とすると、a(−3,0)の濃度値S[a(−3,0)]は、
S[a(−3,0)]=r1×S(b1)+r2×S(b2)
+r3×S(b3)+r4×S(b4) ・・(1)
となる。
【0024】
次に、上記した範囲内のマトリックスを用いて、i方向に積分する。すなわち、
【0025】
【数1】

【0026】
を算出する。これは、法線ベクトルNの方向に沿ったプロファイルであり、その結果を図5(A)にグラフで例示する。次に、このプロファイルをi方向に微分する。すなわち、 B(j)=A(j)−A(j−1) ・・(3)
を求める。その結果を図5(B)にグラフで示す。このピーク値のj方向への位置は、法線ベクトルN上での対象物Wの像の境界を示すものであり、当初に求めたポリゴンの頂点p2を、法線ベクトルN上でピーク値の位置に移動させる。移動後の頂点は、しきい値に依存しないものであるから、対象物Wの形状や材質によるベースラインの変化の影響を受けず、常に正確なものとなる。
【0027】
以上の頂点の修正動作を、当初に作成した全てのポリゴンデータの全頂点について行うことにより、得られる3次元画像は、当初に作成したポリゴンデータによる画像に比して、対象物Wの境界面をより正確に表すものとなる。
【0028】
ここで、以上の演算によるポリゴン頂点の修正処理において、対象物のコーナーもしくはエッジ上の位置する頂点については、プロファイルを計算するための領域が広ければそのコーナーもしくはエッジが鈍化されて修正をされてしまう可能性がある。そこで、このようなコーナーもしくはエッジ上の頂点については、軸に沿ったプロファイルを計算するための軸の両側の領域を狭くして上記と同等の処理を行うことが好ましい。あるいは、このようなコーナーもしくはエッジ上の頂点については、修正処理を行わないようにすることもできる。
【0029】
なお、以上の実施の形態においては、X線発生装置1とX線検出器2の間に回転テーブル3を配置して、回転テーブル3上の対象物Wに回転を与えてCT撮影を行う例を示したが、X線発生装置1とX線検出器2の対を対象物Wの回りに回転させてCT撮影を行うタイプのX線断層撮像装置にも本発明を適用し得ることは言うまでもない。
【0030】
また、以上の実施の形態においては、X線断層撮像装置による撮像結果を3次元画像化する場合について述べたが、X線断層撮像装置以外の、例えば光切断法等により得られたボリュームデータの3次元画像化にも適用し得ることは勿論である。
【図面の簡単な説明】
【0031】
【図1】本発明の実施の形態の構成図で、機械的構成を表す模式図とシステム構成を表すブロック図とを併記して示す図である。
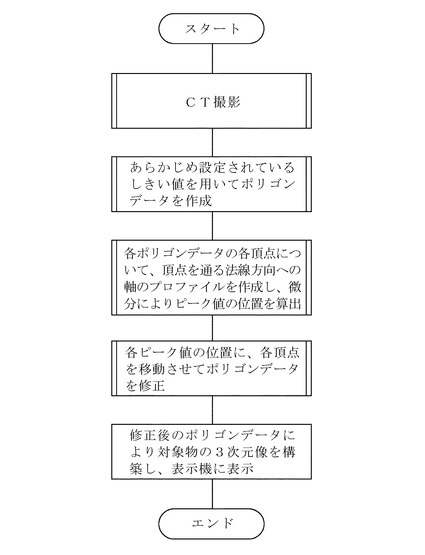
【図2】本発明の実施の形態におけるCT撮影〜3次元画像の表示までの動作を表すフローチャートである。
【図3】本発明の実施の形態におけるポリゴンの頂点の修正演算の説明図で、(A)は公知の手法により求められたポリゴンデータを2次元で表す部分図であり、(B)はそのポリゴンデータの修正手法の説明図である。
【図4】本発明の実施の形態において用いるマトリックス(ボクセル)の濃度値の算出の仕方の説明図である。
【図5】本発明の実施の形態におけるポリゴンの頂点の法線方向へのプロファイルの例を示すグラフ(A)と、そのプロファイルの微分結果の例を示すグラフである。
【図6】従来のマーチンキューブス法によるポリゴンデータの作成方法の説明図である。
【符号の説明】
【0032】
1 X線発生装置
2 X線検出器
3 回転テーブル
10 画像データ取り込み回路
11 コンピュータ
12 表示器
13 操作部
W 対象物
【技術分野】
【0001】
本発明は、対象物のボリュームデータから、その対象物の3次元画像を生成する方法と、その3次元画像化方法を利用したX線断層撮像装置に関する。
【背景技術】
【0002】
X線断層撮像装置や3次元形状計測装置等において、撮像もしくは計測した対象物のボリュームデータを用いたレンダリングの手法として、従来、マーチンキューブス法と称される手法が多用されている。
【0003】
マーチンキューブス法は、図6に示すように、ボリュームデータを構成する各ボクセルの立方体の重心位置に、当該ボクセルの濃度値を持つ点要素が存在するものとし、互いに隣接する8点の点要素v1〜v8でキューブを形成し、その各キューブの各辺について、あらかじめ設定されているしきい値を用いて、各点要素を内側と外側に分けるように、両側の点要素の濃度値に比例する位置に補間点pを定め、各辺の補間点pを接続してポリゴンPを形成し、このポリゴンPの集合によって対象物の表面等の境界面を構築する(例えば非特許文献1)。
【非特許文献1】Ugai laboratory Homepage, セミナー 第9回 「マーチンキューブス法」、[online] 、[平成19年3月28日検索]、インターネット<URL;http://wsim.cs.ehime-u.ac.jp/study/seminar/seminar9.html>
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、マーチンキューブス法においては、しきい値を一律に決めると、特にX線断層撮像装置による撮像結果をボリュームデータとしてレンダリングを行ったとき、正確に対象物の境界面を決められないという問題がある。これは、対象物の材質や形状に依存してベースラインが変化するのがその理由である。その結果として、得られるポリゴンも誤差を含んだものとなる。
【0005】
本発明はこのような実情に鑑みてなされたもので、しきい値とベースラインとの関係による影響を受けることなく、対象物の境界面を常に正確に表すことのできる3次元画像化方法と、その方法を利用したX線断層撮像装置の提供をその課題としている。
【課題を解決するための手段】
【0006】
上記の課題を解決するため、本発明の3次元画像化方法は、対象物のボリュームデータを構成するボクセルから、あらかじめ設定されているしきい値を用いて一定濃度の境界を表現するポリゴンデータを生成した後、その各ポリゴンの各頂点について、当該頂点を通り、かつ、その近傍の物体境界面の法線方向への軸に沿って、その軸の両側所定領域の濃度値を積算して得られるプロファイルを微分することによって得られるピーク値の座標を求め、その座標を当該頂点の座標として、各ポリゴンの各頂点座標を補正することによって特徴付けられる(請求項1)。
【0007】
ここで、本発明の3次元画像化方法においては、上記プロファイルを求める際に用いる濃度値が、上記ボリュームデータを構成する当初のボクセルの濃度値を、上記法線方向に平行な方向を含む互いに直交する3軸方向に並ぶボクセルの濃度値に置換したものであって、置換後の各ボクセルの濃度値は、置換後のボクセル内での当初の各ボクセルの占拠率に基づいて当初ボクセルの濃度値を重み付け演算を行って求める構成(請求項2)を好適に採用することができる。
【0008】
また、本発明の3次元画像化方法においては、上記各頂点についての上記軸に沿ったプロファイルを求めるに当たっての上記軸の両側所定領域を、当該領域の物体境界面の形状に基づき、コーナーもしくはエッジである場合には狭くして上記プロファイルを求める構成(請求項3)を採用することが望ましい。
【0009】
一方、本発明のX線断層撮像装置は、互いに対向するX線発生装置とX線検出装置の間に、対象物を搭載するテーブルが配置され、そのテーブルを上記X線発生装置とX線検出装置とを結ぶ線に直交する回転軸を中心として回転させるか、もしくは上記X線発生装置とX線検出装置の対を上記回転軸の回りに回転させ、所定角度の回転ごとに採取した対象物のX線透過データを用いて、対象物の内部構造を画像化する3次元画像化手段を備えたX線断層像撮影装置において、上記3次元画像化手段は、上記X線透過データを対象物のボリュームデータとして、請求項1、2または3に記載の3次元画像化方法に基づく演算により対象物の内部構造を画像化することによって特徴付けられる(請求項4)。
【0010】
本発明は、一旦マーチンキューブ法に基づくレンダリングによってポリゴンデータを生成した後、そのポリゴンの各頂点を、当該各頂点における対象物の境界面の法線方向へのプロファイルのピーク値の位置情報に基づいて修正することよって、課題を解決しようとするものである。
【0011】
すなわち、本発明においては、既存の技術によりポリゴンデータを生成した後、その全てのポリゴンの全頂点について、頂点を通り、かつ、その近傍の物体境界面の法線方向への軸に沿って、その軸の両側にあらかじめ設定されている領域の濃度値を積算してプロファイルを求め、そのプロファイルを微分してそのピーク値の座標を求める。この軸に沿ったプロファイルは、対象物の境界面において最大の濃度値変化を示し、このプロファイルを微分して得られるピーク値の位置は、従って、対象物の境界面の位置と一致する。このようにして求められた対象物の境界面は、しきい値を用いることなく求められるものであって、該当のポリゴン頂点を上記のプロファイルのピーク値の位置へと移動させることを、全ポリゴンの全頂点について行うことにより、しきい値に依存しない正確な境界面の3次元画像化を実現することができる。
【0012】
ここで、プロファイルの計算に寄与する領域を常に一定にしていると、ポリゴンの頂点が対象物のコーナーやエッジなど、曲率の小さい領域に存在している場合には、形状をなまらせる可能性がある。請求項3に係る発明は、この点を解消するものであり、コーナーやエッジの近傍に位置するポリゴン頂点の法線方向への軸のプロファイルの計算に当たっては、計算に寄与する領域を狭くすることにより、コーナーやエッジ形状の鈍化を少なくすることができる。
【0013】
請求項4に係る発明のX線断層撮像装置は、CT撮影により採取された対象物のX線透過データに基づくボリュームデータを基に、既存技術でポリゴンデータを作成した後、上記の方法によって全てのポリゴンの全頂点の位置を修正することにより、一定のしきい値を用いて、対象物の材質や形状によるベースラインの変化があっても、これらの要因に影響されることなく、常により正確に対象物の境界面を画像化することが可能となる。
【発明の効果】
【0014】
本発明によれば、しきい値を一律に決めても、ポリゴンデータの生成後に、しきい値と無関係な計算によって各ポリゴンの各頂点が修正されることになり、従来のマーチンキューブス法による3次元画像に比して、対象物の実際の境界面に近い3次元画像を得ることができる。
【0015】
また、このX線断層撮像装置の3次元画像化機能にこの方法を適用すれば、対象物の材質や形状に起因するベースラインの変化があって、X線透過データにおける各ボクセルのCT値に一貫性が欠落しても、あらかじめ設定しているしきい値に関わりなく、対象物の境界面を正確に表した3次元画像を得ることが可能となる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照しつつ本発明の実施の形態について説明する。
図1は本発明の実施の形態の構成図で、機械的構成を表す模式図とシステム構成を表すブロック図とを併記して示す図である。
【0017】
X線発生装置1に対向してX線検出器2が配置されており、これらの間に、対象物Wを搭載するための回転テーブル3が配置されている。X線発生装置1はコーン状のX線を発生し、X線検出器2は2次元検出器である。また、回転テーブル3は、X線発生装置1とX線検出器2を繋ぐX線光軸Lに直交する鉛直の回転軸Rの回りに回転する。
【0018】
X線検出器2の出力は、画像データ取り込み回路10を介してコンピュータ11に取り込まれる。コンピュータ11には、対象物Wの3次元画像等を表示するための表示器12と、後述するしきい値を設定したり、あるいは各種指令を与えるためのキーボードやマウス、ジョイスティック等からなる操作部13が接続されている。
【0019】
CT撮影から3次元画像の構築までの手順を図2にフローチャートで示す。まず、CT撮影に際しては、回転テーブル3上に対象物Wを搭載した状態で、X線を照射しつつ、回転テーブル3を所定の微小角度ずつ回転させ、その回転ごとにX線検出器2の出力、換言すれば対象物WのX線透過データを取り込んで記憶する。360°分のデータを取り込んだ後、コンピュータ11は、そのX線透過データを用いて対象物Wの3次元像を以下の手法によって構築する。
【0020】
まず、取り込んだX線透過データをボリュームデータとして、マーチンキューブス法等の公知の手法によりしきい値を用いた演算によってポリゴンデータを生成する。次に、その全てのポリゴンデータの全頂点について、頂点を通る法線方向への軸のプロファイルを計算し、そのプロファイルを微分することによってピーク値の位置を求め、頂点の位置をピーク値の位置に移動させ、ポリゴンデータを修正する。修正後のポリゴンデータにより、対象物Wの3次元像を構築し、表示器12に表示する。
【0021】
以下、ポリゴンの頂点の修正方法について、図3〜図5を参照しつつ詳述する。
図3(A)は、CT撮影により得られた対象物WのX線透過データをボリュームデータとして用い、公知のマーチンキューブス法によって得られたポリゴンの頂点の例を示す部分図であり、頂点はプロットp1〜p4で示している。なお、説明の簡素化のために、図3では2次元で表現しているが、実際には3次元データを取り扱う。
【0022】
図3(A)においてp2で示される頂点を修正する手法について説明する。
頂点p2の近傍の平面を定義し、頂点p2を通る法線を求める。平面を定義するためのある一定の広がりは、パラメータとしてあらかじめ設定しておく。次に、図3(B)に示すように、この法線ベクトルNを基に、マトリックスa(i,j)を設ける。このマトリックスは、法線ベクトルNの方向を含む互いに直交する3軸方向に沿ったものとし、図3(B)ではjの方向が法線ベクトルNの方向と平行である。また、頂点p2を含むマトリックスをa(0,0)とし、i方向で右向きは+、左向きを−とし、j方向で上向きを+、下向きを−とする。また、p2の修正のための計算範囲を定めておく。ここでは、−3≦i≦3,−3≦j≦3とする。
【0023】
マトリックスa(i,j)に、CT撮影により得られたボクセルの濃度値(CT値)を割り当てる。その割り当ては、マトリックスa(i,j)内の当初ボクセルの占有率によって重み付け加算を行う。例えばa(−3,0)について述べると、図4に拡大図を示すように、a(−3,0)は、CT撮影により得られている当初のボクセル(図4において破線で示す)の4個、つまりb1〜b4に跨がっている。その占有率をそれぞれr1,r2,r3,r4とし、各当初ボクセルb1〜b4の濃度値(CT値)をそれぞれS(b1)、S(b2)、S(b3)、S(b4)とすると、a(−3,0)の濃度値S[a(−3,0)]は、
S[a(−3,0)]=r1×S(b1)+r2×S(b2)
+r3×S(b3)+r4×S(b4) ・・(1)
となる。
【0024】
次に、上記した範囲内のマトリックスを用いて、i方向に積分する。すなわち、
【0025】
【数1】
【0026】
を算出する。これは、法線ベクトルNの方向に沿ったプロファイルであり、その結果を図5(A)にグラフで例示する。次に、このプロファイルをi方向に微分する。すなわち、 B(j)=A(j)−A(j−1) ・・(3)
を求める。その結果を図5(B)にグラフで示す。このピーク値のj方向への位置は、法線ベクトルN上での対象物Wの像の境界を示すものであり、当初に求めたポリゴンの頂点p2を、法線ベクトルN上でピーク値の位置に移動させる。移動後の頂点は、しきい値に依存しないものであるから、対象物Wの形状や材質によるベースラインの変化の影響を受けず、常に正確なものとなる。
【0027】
以上の頂点の修正動作を、当初に作成した全てのポリゴンデータの全頂点について行うことにより、得られる3次元画像は、当初に作成したポリゴンデータによる画像に比して、対象物Wの境界面をより正確に表すものとなる。
【0028】
ここで、以上の演算によるポリゴン頂点の修正処理において、対象物のコーナーもしくはエッジ上の位置する頂点については、プロファイルを計算するための領域が広ければそのコーナーもしくはエッジが鈍化されて修正をされてしまう可能性がある。そこで、このようなコーナーもしくはエッジ上の頂点については、軸に沿ったプロファイルを計算するための軸の両側の領域を狭くして上記と同等の処理を行うことが好ましい。あるいは、このようなコーナーもしくはエッジ上の頂点については、修正処理を行わないようにすることもできる。
【0029】
なお、以上の実施の形態においては、X線発生装置1とX線検出器2の間に回転テーブル3を配置して、回転テーブル3上の対象物Wに回転を与えてCT撮影を行う例を示したが、X線発生装置1とX線検出器2の対を対象物Wの回りに回転させてCT撮影を行うタイプのX線断層撮像装置にも本発明を適用し得ることは言うまでもない。
【0030】
また、以上の実施の形態においては、X線断層撮像装置による撮像結果を3次元画像化する場合について述べたが、X線断層撮像装置以外の、例えば光切断法等により得られたボリュームデータの3次元画像化にも適用し得ることは勿論である。
【図面の簡単な説明】
【0031】
【図1】本発明の実施の形態の構成図で、機械的構成を表す模式図とシステム構成を表すブロック図とを併記して示す図である。
【図2】本発明の実施の形態におけるCT撮影〜3次元画像の表示までの動作を表すフローチャートである。
【図3】本発明の実施の形態におけるポリゴンの頂点の修正演算の説明図で、(A)は公知の手法により求められたポリゴンデータを2次元で表す部分図であり、(B)はそのポリゴンデータの修正手法の説明図である。
【図4】本発明の実施の形態において用いるマトリックス(ボクセル)の濃度値の算出の仕方の説明図である。
【図5】本発明の実施の形態におけるポリゴンの頂点の法線方向へのプロファイルの例を示すグラフ(A)と、そのプロファイルの微分結果の例を示すグラフである。
【図6】従来のマーチンキューブス法によるポリゴンデータの作成方法の説明図である。
【符号の説明】
【0032】
1 X線発生装置
2 X線検出器
3 回転テーブル
10 画像データ取り込み回路
11 コンピュータ
12 表示器
13 操作部
W 対象物
【特許請求の範囲】
【請求項1】
対象物のボリュームデータを構成するボクセルから、あらかじめ設定されているしきい値を用いて一定濃度の境界を表現するポリゴンデータを生成した後、その各ポリゴンの各頂点について、当該頂点を通り、かつ、その近傍の物体境界面の法線方向への軸に沿って、その軸の両側所定領域の濃度値を積算して得られるプロファイルを微分することによって得られるピーク値の座標を求め、その座標を当該頂点の座標として、各ポリゴンの各頂点座標を補正することを特徴とする3次元画像化方法。
【請求項2】
上記プロファイルを求める際に用いる濃度値が、上記ボリュームデータを構成する当初のボクセルの濃度値を、上記法線方向に平行な方向を含む互いに直交する3軸方向に並ぶボクセルの濃度値に置換したものであって、置換後の各ボクセルの濃度値は、置換後のボクセル内での当初の各ボクセルの占拠率に基づいて当初ボクセルの濃度値を重み付け演算を行って求めることを特徴とする請求項1に記載の3次元画像化方法。
【請求項3】
上記各頂点についての上記軸に沿ったプロファイルを求めるに当たっての上記軸の両側所定領域を、当該領域の物体境界面の形状に基づき、コーナーもしくはエッジである場合には狭くして上記プロファイルを求めることを特徴とする請求項1または2に記載の3次元画像化方法。
【請求項4】
互いに対向するX線発生装置とX線検出装置の間に、対象物を搭載するテーブルが配置され、そのテーブルを上記X線発生装置とX線検出装置とを結ぶ線に直交する回転軸を中心として回転させるか、もしくは上記X線発生装置とX線検出装置の対を上記回転軸の回りに回転させ、所定角度の回転ごとに採取した対象物のX線透過データを用いて、対象物の内部構造を画像化する3次元画像化手段を備えたX線断層像撮影装置において、
上記3次元画像化手段は、上記X線透過データを対象物のボリュームデータとして、請求項1、2または3に記載の3次元画像化方法に基づく演算により対象物の内部構造を画像化することを特徴とするX線断層撮像装置。
【請求項1】
対象物のボリュームデータを構成するボクセルから、あらかじめ設定されているしきい値を用いて一定濃度の境界を表現するポリゴンデータを生成した後、その各ポリゴンの各頂点について、当該頂点を通り、かつ、その近傍の物体境界面の法線方向への軸に沿って、その軸の両側所定領域の濃度値を積算して得られるプロファイルを微分することによって得られるピーク値の座標を求め、その座標を当該頂点の座標として、各ポリゴンの各頂点座標を補正することを特徴とする3次元画像化方法。
【請求項2】
上記プロファイルを求める際に用いる濃度値が、上記ボリュームデータを構成する当初のボクセルの濃度値を、上記法線方向に平行な方向を含む互いに直交する3軸方向に並ぶボクセルの濃度値に置換したものであって、置換後の各ボクセルの濃度値は、置換後のボクセル内での当初の各ボクセルの占拠率に基づいて当初ボクセルの濃度値を重み付け演算を行って求めることを特徴とする請求項1に記載の3次元画像化方法。
【請求項3】
上記各頂点についての上記軸に沿ったプロファイルを求めるに当たっての上記軸の両側所定領域を、当該領域の物体境界面の形状に基づき、コーナーもしくはエッジである場合には狭くして上記プロファイルを求めることを特徴とする請求項1または2に記載の3次元画像化方法。
【請求項4】
互いに対向するX線発生装置とX線検出装置の間に、対象物を搭載するテーブルが配置され、そのテーブルを上記X線発生装置とX線検出装置とを結ぶ線に直交する回転軸を中心として回転させるか、もしくは上記X線発生装置とX線検出装置の対を上記回転軸の回りに回転させ、所定角度の回転ごとに採取した対象物のX線透過データを用いて、対象物の内部構造を画像化する3次元画像化手段を備えたX線断層像撮影装置において、
上記3次元画像化手段は、上記X線透過データを対象物のボリュームデータとして、請求項1、2または3に記載の3次元画像化方法に基づく演算により対象物の内部構造を画像化することを特徴とするX線断層撮像装置。
【図1】

【図2】
【図3】

【図4】
【図5】

【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−257333(P2008−257333A)
【公開日】平成20年10月23日(2008.10.23)
【国際特許分類】
【出願番号】特願2007−96426(P2007−96426)
【出願日】平成19年4月2日(2007.4.2)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
【公開日】平成20年10月23日(2008.10.23)
【国際特許分類】
【出願日】平成19年4月2日(2007.4.2)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
[ Back to top ]