
3次元空間座標入力装置
【課題】皮膚感覚のフィードバックを可能とすることのできる3次元空間座標入力装置を得る。
【解決手段】3次元情報データベース210は、仮想物体表面の摩擦係数値を示す皮膚感覚生成用データ213と、摩擦係数値と帯電フィルム103の帯電量との関係を示す摩擦力・帯電量変換用データ214を備える。帯電量演算部221は、3次元入力に基づき、皮膚感覚生成用データ213と摩擦力・帯電量変換用データ214とを用いて、仮想物体表面の摩擦係数値に対応した帯電量を演算する。3次元情報入出力デバイス100における帯電フィルム103は、帯電量演算部221で演算された帯電量に基づいて帯電され、操作者に対して皮膚感覚のフィードバックを行う。
【解決手段】3次元情報データベース210は、仮想物体表面の摩擦係数値を示す皮膚感覚生成用データ213と、摩擦係数値と帯電フィルム103の帯電量との関係を示す摩擦力・帯電量変換用データ214を備える。帯電量演算部221は、3次元入力に基づき、皮膚感覚生成用データ213と摩擦力・帯電量変換用データ214とを用いて、仮想物体表面の摩擦係数値に対応した帯電量を演算する。3次元情報入出力デバイス100における帯電フィルム103は、帯電量演算部221で演算された帯電量に基づいて帯電され、操作者に対して皮膚感覚のフィードバックを行う。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、3次元空間座標を入力すると共に、触覚または力覚を操作者に瞬時的に知覚させる機能としてフォースフィードバック及び感覚フィードバックを有する3次元空間座標入力装置に関するものである。
【背景技術】
【0002】
従来の座標入力においては、マウスに代表される2次元座標入力装置が主であり、3次元座標の入力の際には、これらの装置を使用して疑似的に座標入力を行うことが多かったが、コンピュータ技術の発達により、CAD、バーチャルリアリティ、またはゲーム等の分野において、3次元座標のデータを取り扱う機会が増してきた。これに伴い、このような3次元データを取り扱う際に3次元座標を入力する必要が増加してきている。
【0003】
バーチャルリアリティの分野等においては、触覚または力覚を操作者に瞬時的に知覚させる機能としてフォースフィードバックを有する座標入力装置が所望されるが、その際には、リンクを使用した方式が有利となる。ここで、用語「フォースフィードバック」は触覚または力覚を操作者に瞬時的に知覚させる機能を意味する。このようなフォースフィードバック付き座標入力装置としては、センサ及びアクチュエータを3本のアームの各関節部に配置した、例えば特許文献1に記載されたような3次元空間座標入力装置があった。この3次元空間座標入力装置は、本体の各アーム関節部のセンサにより、3次元座標と、操作者の掛ける力の検出値とを得て、アクチュエータによりフォースフィードバックを実現する。また、操作者は摘みを握って操作する。摘みには押しボタンが実装されており、座標入力に用いる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000―112649号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、フォースフィードバック付きの座標入力装置としての上記従来の3次元空間座標入力装置については、フォースフィードバックを用いて、操作者に力学的な反力を与えることはできるが、仮想物体の表面の質感等の、皮膚感覚のフィードバックを与えるといったことはできなかった。
【0006】
この発明は上記のような課題を解決するためになされたもので、皮膚感覚のフィードバックを可能とすることのできる3次元空間座標入力装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係る3次元空間座標入力装置は、3次元入力と力覚呈示と触覚呈示とを行う3次元情報入出力デバイスと、仮想空間生成用データと、仮想空間における仮想物体表面の摩擦係数値を示す皮膚感覚生成用データと、反力生成用データとを有する3次元情報格納部と、3次元情報入出力デバイスによる3次元入力に基づき、皮膚感覚生成用データを用いて、3次元情報入出力デバイスへの触覚呈示の制御量を演算する触覚情報演算部と、3次元情報入出力デバイスからの信号を触覚情報演算部に送出すると共に、触覚情報演算部の演算結果に基づいて3次元情報入出力デバイスの制御を行う触覚情報制御部とを備え、3次元情報入出力デバイスは、触覚呈示を帯電量の制御で行うようにしたものである。
【発明の効果】
【0008】
この発明の3次元空間座標入力装置は、仮想物体表面の摩擦係数値を示す皮膚感覚生成用データを用いて、3次元情報入出力デバイスへの触覚呈示の制御量を演算し、3次元情報入出力デバイスは、触覚呈示を帯電量の制御で行うようにしたので、皮膚感覚のフィードバックを可能とすることができる。
【図面の簡単な説明】
【0009】
【図1】この発明の実施の形態1による3次元空間座標入力装置を示す構成図である。
【図2】この発明の実施の形態1の3次元空間座標入力装置における3次元情報入出力デバイスを示す斜視図である。
【図3】この発明の実施の形態1の3次元空間座標入力装置における帯電フィルムの帯電による触覚呈示の説明図である。
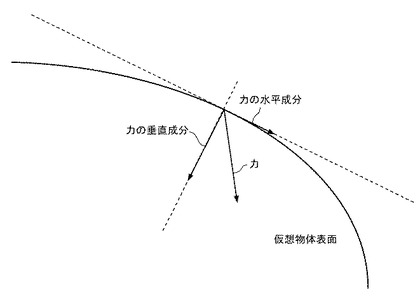
【図4】この発明の実施の形態1の3次元空間座標入力装置において、力を仮想物体表面に水平な成分と垂直な成分に分解した様子を示す説明図である。
【発明を実施するための形態】
【0010】
実施の形態1.
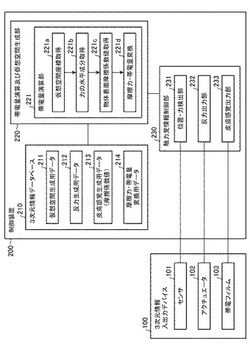
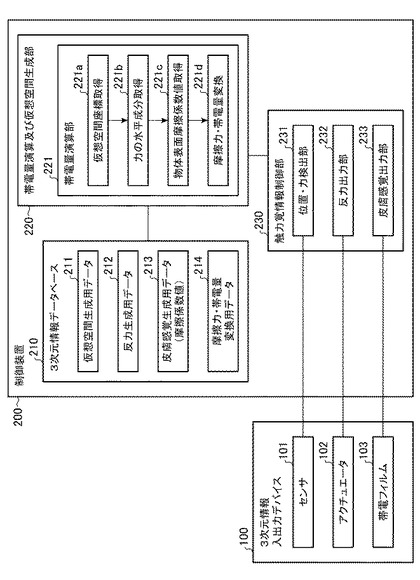
図1は、この発明の実施の形態1による3次元空間座標入力装置を示す構成図である。
図1に示す3次元空間座標入力装置は、3次元情報入出力デバイス100と制御装置200とからなる。3次元情報入出力デバイス100は、3次元入力と力覚呈示と触覚呈示とが可能なデバイスであり、図2にその構成を示す。
【0011】
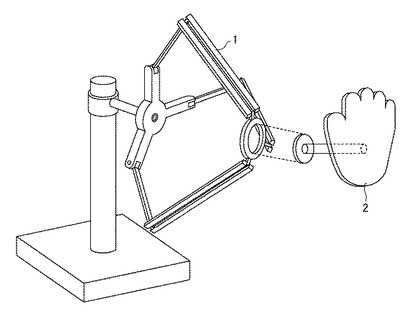
図2に示すように、本体1の各アームの関節部のセンサにより、3次元座標と、操作者の掛ける力の検出値とを得て、アクチュエータによりフォースフィードバックを実現するのは従来と同様である。なお、図2では、センサとアクチュエータの図示は省略している。すなわち、図2の構成はフォースフィードバックに関する図示を省略したものである。操作者は、パッド2に手を置いて操作する。パッド2は、手のひら状に凹んだ板の指先部分に図示しないタッチパッドが実装されており、座標入力に用いることができる。また、手のひら状の板全体に、帯電フィルム(図示省略)が貼付されており、帯電量を変化させることで手のひらと指先に皮膚感覚のフィードバックを与えることができるよう構成されている。
【0012】
図1に戻り、3次元情報入出力デバイス100は、センサ101、アクチュエータ102、帯電フィルム103を備えている。センサ101は、上述したように図2では図示されていないが、各アームの関節部に設けられ、パッド2で操作される位置や力を検出するものである。また、アクチュエータ102は、各アームを駆動しフォースフィードバックを実現するためのアクチュエータである。さらに、帯電フィルム103は、帯電量を制御することによって、手のひらと指先に皮膚感覚のフィードバックを与えるための手段である。
【0013】
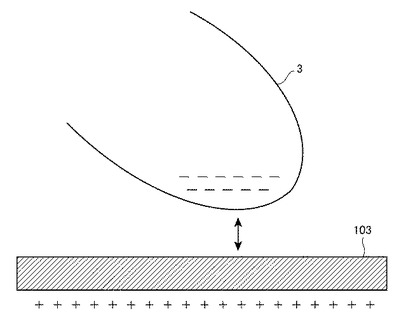
図3に帯電フィルム103による皮膚感覚のフィードバックの様子を示す。帯電フィルム103を帯電させることで、指3にも電荷が生じ、皮膚感覚が生じる。帯電フィルム103の帯電量を制御することで、皮膚感覚を変化させることができる。
【0014】
再び、図1に戻り、制御装置200はコンピュータを用いて構成されており、3次元情報データベース(3次元情報格納部)210、帯電量演算及び仮想空間生成部220、触力覚情報制御部(触覚情報制御部)230を備えている。3次元情報データベース210は、3次元空間座標入力装置として用いる各種のデータが登録されたデータベースであり、仮想空間生成用データ211、反力生成用データ212、皮膚感覚生成用データ213、摩擦力・帯電量変換用データ214を備えている。仮想空間生成用データ211は、3次元仮想空間を生成するための仮想物体の形状や位置といった各種のデータである。反力生成用データ212は、仮想空間における仮想物体の弾性値や重さといった設定値である。皮膚感覚生成用データ213は、仮想物体の表面の摩擦係数値を示しており、仮想物体表面上の各点における摩擦係数値をデータベース化したものである。摩擦力・帯電量変換用データ214は、摩擦係数値と帯電フィルム103における帯電量との関係を示すデータであり、予め計測によりデータベース化されているものとする。
【0015】
帯電量演算及び仮想空間生成部220は、仮想空間生成用データ211を用いて仮想空間のデータを生成したり、触力覚情報制御部230を介して入力した3次元情報入出力デバイス100からの操作入力に応じて反力を生成するといった従来と同様の機能を有すると共に、触力覚情報制御部230を介して入力した3次元情報入出力デバイス100からの操作入力に応じて触覚情報を生成するための帯電量演算部(触覚情報演算部)221を備えている。なお、帯電量演算及び仮想空間生成部220における仮想空間の生成や反力の生成に関しては従来と同様であるため、その構成の図示や詳細な説明は省略する。また、帯電量演算部221は、コンピュータがソフトウェアを実行することにより実現されているものである。
【0016】
触力覚情報制御部230は、3次元情報入出力デバイス100からの操作入力情報を受け取って帯電量演算及び仮想空間生成部220に送出すると共に、帯電量演算及び仮想空間生成部220で生成した反力や触覚情報に基づいて、3次元情報入出力デバイス100を制御する制御部であり、位置・力検出部231、反力出力部232、皮膚感覚出力部233を備えている。位置・力検出部231は、3次元情報入出力デバイス100におけるセンサ101からの信号に基づいて、3次元座標や操作者が掛ける力の量を検出する。反力出力部232は、帯電量演算及び仮想空間生成部220から出力された反力を示す信号に基づいて3次元情報入出力デバイス100におけるアクチュエータ102を制御する。皮膚感覚出力部233は、帯電量演算部221で演算された帯電量を示す信号に基づいて帯電フィルム103における帯電量を制御する。
【0017】
次に、実施の形態1の3次元空間座標入力装置の動作について説明する。
先ず、帯電量演算及び仮想空間生成部220によって仮想空間が生成され、この仮想空間が図示しない表示装置等に表示されるのは従来と同様である。次に、帯電量演算及び仮想空間生成部220の帯電量演算部221は、位置・力検出部231からの3次元位置入力を取得し(221a)、仮想空間中の仮想物体位置に触れているかどうかを判断する。触れていた場合、位置・力検出部231から操作者の掛ける力の検出値を、図4に示すように、仮想物体表面に水平な成分と、垂直な成分に力を分解する(221b)。その後、皮膚感覚生成用データ(摩擦係数値)213を取得し(221c)、この皮膚感覚生成用データ213と、仮想物体表面に水平な成分の力とから、摩擦力を算出する。そして、求めた摩擦力と、摩擦力・帯電量変換用データ214から、帯電フィルムの帯電量を計算する(221d)。
【0018】
触力覚情報制御部230の反力出力部232より、帯電量演算及び仮想空間生成部220で演算された反力に応じた信号をアクチュエータ102に出力し、さらに、皮膚感覚出力部233より、演算された帯電量に応じた信号を帯電フィルム103に出力することでフォースフィードバックと感覚フィードバックとを実現する。
【0019】
このように、実施の形態1では、比較的小規模な変更により、操作者に力学的な反力と共に、仮想物体の表面の、皮膚感覚のフィードバックを与える3次元空間座標入力装置を実現できる。
【0020】
以上説明したように、実施の形態1の3次元空間座標入力装置によれば、3次元入力と力覚呈示と触覚呈示とを行う3次元情報入出力デバイスと、仮想空間生成用データと、仮想空間における仮想物体表面の摩擦係数値を示す皮膚感覚生成用データと、反力生成用データとを有する3次元情報格納部と、3次元情報入出力デバイスによる3次元入力に基づき、皮膚感覚生成用データを用いて、3次元情報入出力デバイスへの触覚呈示の制御量を演算する触覚情報演算部と、3次元情報入出力デバイスからの信号を触覚情報演算部に送出すると共に、触覚情報演算部の演算結果に基づいて3次元情報入出力デバイスの制御を行う触覚情報制御部とを備え、3次元情報入出力デバイスは、触覚呈示を帯電量の制御で行うようにしたので、皮膚感覚のフィードバックを可能とすることができる。
【0021】
また、実施の形態1の3次元空間座標入力装置によれば、3次元情報格納部は、摩擦係数と触覚呈示量の関係を定めた摩擦力・帯電量変換用データを備え、触覚情報演算部は、仮想空間内の仮想物体に掛かる力を、仮想物体表面に垂直な方向の力と水平な方向の力とに分解し、水平な方向の力と、皮膚感覚生成用データにおける摩擦係数値と、摩擦力・帯電量変換用データとに基づいて触覚呈示の帯電量を算出するようにしたので、操作者に対して確実に皮膚感覚のフィードバックを与えることができる。
【0022】
なお、本願発明はその発明の範囲内において、実施の形態の任意の構成要素の変形、もしくは実施の形態の任意の構成要素の省略が可能である。
【符号の説明】
【0023】
1 本体、2 パッド、3 指、100 3次元情報入出力デバイス、101 センサ、102 アクチュエータ、103 帯電フィルム、200 制御装置、210 3次元情報データベース(3次元情報格納部)、211 仮想空間生成用データ、212 反力生成用データ、213 皮膚感覚生成用データ、214 摩擦力・帯電量変換用データ、220 帯電量演算及び仮想空間生成部、221 帯電量演算部(触覚情報演算部)、230 触力覚情報制御部(触覚情報制御部)、231 位置・力検出部、232 反力出力部、233 皮膚感覚出力部。
【技術分野】
【0001】
この発明は、3次元空間座標を入力すると共に、触覚または力覚を操作者に瞬時的に知覚させる機能としてフォースフィードバック及び感覚フィードバックを有する3次元空間座標入力装置に関するものである。
【背景技術】
【0002】
従来の座標入力においては、マウスに代表される2次元座標入力装置が主であり、3次元座標の入力の際には、これらの装置を使用して疑似的に座標入力を行うことが多かったが、コンピュータ技術の発達により、CAD、バーチャルリアリティ、またはゲーム等の分野において、3次元座標のデータを取り扱う機会が増してきた。これに伴い、このような3次元データを取り扱う際に3次元座標を入力する必要が増加してきている。
【0003】
バーチャルリアリティの分野等においては、触覚または力覚を操作者に瞬時的に知覚させる機能としてフォースフィードバックを有する座標入力装置が所望されるが、その際には、リンクを使用した方式が有利となる。ここで、用語「フォースフィードバック」は触覚または力覚を操作者に瞬時的に知覚させる機能を意味する。このようなフォースフィードバック付き座標入力装置としては、センサ及びアクチュエータを3本のアームの各関節部に配置した、例えば特許文献1に記載されたような3次元空間座標入力装置があった。この3次元空間座標入力装置は、本体の各アーム関節部のセンサにより、3次元座標と、操作者の掛ける力の検出値とを得て、アクチュエータによりフォースフィードバックを実現する。また、操作者は摘みを握って操作する。摘みには押しボタンが実装されており、座標入力に用いる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000―112649号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、フォースフィードバック付きの座標入力装置としての上記従来の3次元空間座標入力装置については、フォースフィードバックを用いて、操作者に力学的な反力を与えることはできるが、仮想物体の表面の質感等の、皮膚感覚のフィードバックを与えるといったことはできなかった。
【0006】
この発明は上記のような課題を解決するためになされたもので、皮膚感覚のフィードバックを可能とすることのできる3次元空間座標入力装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係る3次元空間座標入力装置は、3次元入力と力覚呈示と触覚呈示とを行う3次元情報入出力デバイスと、仮想空間生成用データと、仮想空間における仮想物体表面の摩擦係数値を示す皮膚感覚生成用データと、反力生成用データとを有する3次元情報格納部と、3次元情報入出力デバイスによる3次元入力に基づき、皮膚感覚生成用データを用いて、3次元情報入出力デバイスへの触覚呈示の制御量を演算する触覚情報演算部と、3次元情報入出力デバイスからの信号を触覚情報演算部に送出すると共に、触覚情報演算部の演算結果に基づいて3次元情報入出力デバイスの制御を行う触覚情報制御部とを備え、3次元情報入出力デバイスは、触覚呈示を帯電量の制御で行うようにしたものである。
【発明の効果】
【0008】
この発明の3次元空間座標入力装置は、仮想物体表面の摩擦係数値を示す皮膚感覚生成用データを用いて、3次元情報入出力デバイスへの触覚呈示の制御量を演算し、3次元情報入出力デバイスは、触覚呈示を帯電量の制御で行うようにしたので、皮膚感覚のフィードバックを可能とすることができる。
【図面の簡単な説明】
【0009】
【図1】この発明の実施の形態1による3次元空間座標入力装置を示す構成図である。
【図2】この発明の実施の形態1の3次元空間座標入力装置における3次元情報入出力デバイスを示す斜視図である。
【図3】この発明の実施の形態1の3次元空間座標入力装置における帯電フィルムの帯電による触覚呈示の説明図である。
【図4】この発明の実施の形態1の3次元空間座標入力装置において、力を仮想物体表面に水平な成分と垂直な成分に分解した様子を示す説明図である。
【発明を実施するための形態】
【0010】
実施の形態1.
図1は、この発明の実施の形態1による3次元空間座標入力装置を示す構成図である。
図1に示す3次元空間座標入力装置は、3次元情報入出力デバイス100と制御装置200とからなる。3次元情報入出力デバイス100は、3次元入力と力覚呈示と触覚呈示とが可能なデバイスであり、図2にその構成を示す。
【0011】
図2に示すように、本体1の各アームの関節部のセンサにより、3次元座標と、操作者の掛ける力の検出値とを得て、アクチュエータによりフォースフィードバックを実現するのは従来と同様である。なお、図2では、センサとアクチュエータの図示は省略している。すなわち、図2の構成はフォースフィードバックに関する図示を省略したものである。操作者は、パッド2に手を置いて操作する。パッド2は、手のひら状に凹んだ板の指先部分に図示しないタッチパッドが実装されており、座標入力に用いることができる。また、手のひら状の板全体に、帯電フィルム(図示省略)が貼付されており、帯電量を変化させることで手のひらと指先に皮膚感覚のフィードバックを与えることができるよう構成されている。
【0012】
図1に戻り、3次元情報入出力デバイス100は、センサ101、アクチュエータ102、帯電フィルム103を備えている。センサ101は、上述したように図2では図示されていないが、各アームの関節部に設けられ、パッド2で操作される位置や力を検出するものである。また、アクチュエータ102は、各アームを駆動しフォースフィードバックを実現するためのアクチュエータである。さらに、帯電フィルム103は、帯電量を制御することによって、手のひらと指先に皮膚感覚のフィードバックを与えるための手段である。
【0013】
図3に帯電フィルム103による皮膚感覚のフィードバックの様子を示す。帯電フィルム103を帯電させることで、指3にも電荷が生じ、皮膚感覚が生じる。帯電フィルム103の帯電量を制御することで、皮膚感覚を変化させることができる。
【0014】
再び、図1に戻り、制御装置200はコンピュータを用いて構成されており、3次元情報データベース(3次元情報格納部)210、帯電量演算及び仮想空間生成部220、触力覚情報制御部(触覚情報制御部)230を備えている。3次元情報データベース210は、3次元空間座標入力装置として用いる各種のデータが登録されたデータベースであり、仮想空間生成用データ211、反力生成用データ212、皮膚感覚生成用データ213、摩擦力・帯電量変換用データ214を備えている。仮想空間生成用データ211は、3次元仮想空間を生成するための仮想物体の形状や位置といった各種のデータである。反力生成用データ212は、仮想空間における仮想物体の弾性値や重さといった設定値である。皮膚感覚生成用データ213は、仮想物体の表面の摩擦係数値を示しており、仮想物体表面上の各点における摩擦係数値をデータベース化したものである。摩擦力・帯電量変換用データ214は、摩擦係数値と帯電フィルム103における帯電量との関係を示すデータであり、予め計測によりデータベース化されているものとする。
【0015】
帯電量演算及び仮想空間生成部220は、仮想空間生成用データ211を用いて仮想空間のデータを生成したり、触力覚情報制御部230を介して入力した3次元情報入出力デバイス100からの操作入力に応じて反力を生成するといった従来と同様の機能を有すると共に、触力覚情報制御部230を介して入力した3次元情報入出力デバイス100からの操作入力に応じて触覚情報を生成するための帯電量演算部(触覚情報演算部)221を備えている。なお、帯電量演算及び仮想空間生成部220における仮想空間の生成や反力の生成に関しては従来と同様であるため、その構成の図示や詳細な説明は省略する。また、帯電量演算部221は、コンピュータがソフトウェアを実行することにより実現されているものである。
【0016】
触力覚情報制御部230は、3次元情報入出力デバイス100からの操作入力情報を受け取って帯電量演算及び仮想空間生成部220に送出すると共に、帯電量演算及び仮想空間生成部220で生成した反力や触覚情報に基づいて、3次元情報入出力デバイス100を制御する制御部であり、位置・力検出部231、反力出力部232、皮膚感覚出力部233を備えている。位置・力検出部231は、3次元情報入出力デバイス100におけるセンサ101からの信号に基づいて、3次元座標や操作者が掛ける力の量を検出する。反力出力部232は、帯電量演算及び仮想空間生成部220から出力された反力を示す信号に基づいて3次元情報入出力デバイス100におけるアクチュエータ102を制御する。皮膚感覚出力部233は、帯電量演算部221で演算された帯電量を示す信号に基づいて帯電フィルム103における帯電量を制御する。
【0017】
次に、実施の形態1の3次元空間座標入力装置の動作について説明する。
先ず、帯電量演算及び仮想空間生成部220によって仮想空間が生成され、この仮想空間が図示しない表示装置等に表示されるのは従来と同様である。次に、帯電量演算及び仮想空間生成部220の帯電量演算部221は、位置・力検出部231からの3次元位置入力を取得し(221a)、仮想空間中の仮想物体位置に触れているかどうかを判断する。触れていた場合、位置・力検出部231から操作者の掛ける力の検出値を、図4に示すように、仮想物体表面に水平な成分と、垂直な成分に力を分解する(221b)。その後、皮膚感覚生成用データ(摩擦係数値)213を取得し(221c)、この皮膚感覚生成用データ213と、仮想物体表面に水平な成分の力とから、摩擦力を算出する。そして、求めた摩擦力と、摩擦力・帯電量変換用データ214から、帯電フィルムの帯電量を計算する(221d)。
【0018】
触力覚情報制御部230の反力出力部232より、帯電量演算及び仮想空間生成部220で演算された反力に応じた信号をアクチュエータ102に出力し、さらに、皮膚感覚出力部233より、演算された帯電量に応じた信号を帯電フィルム103に出力することでフォースフィードバックと感覚フィードバックとを実現する。
【0019】
このように、実施の形態1では、比較的小規模な変更により、操作者に力学的な反力と共に、仮想物体の表面の、皮膚感覚のフィードバックを与える3次元空間座標入力装置を実現できる。
【0020】
以上説明したように、実施の形態1の3次元空間座標入力装置によれば、3次元入力と力覚呈示と触覚呈示とを行う3次元情報入出力デバイスと、仮想空間生成用データと、仮想空間における仮想物体表面の摩擦係数値を示す皮膚感覚生成用データと、反力生成用データとを有する3次元情報格納部と、3次元情報入出力デバイスによる3次元入力に基づき、皮膚感覚生成用データを用いて、3次元情報入出力デバイスへの触覚呈示の制御量を演算する触覚情報演算部と、3次元情報入出力デバイスからの信号を触覚情報演算部に送出すると共に、触覚情報演算部の演算結果に基づいて3次元情報入出力デバイスの制御を行う触覚情報制御部とを備え、3次元情報入出力デバイスは、触覚呈示を帯電量の制御で行うようにしたので、皮膚感覚のフィードバックを可能とすることができる。
【0021】
また、実施の形態1の3次元空間座標入力装置によれば、3次元情報格納部は、摩擦係数と触覚呈示量の関係を定めた摩擦力・帯電量変換用データを備え、触覚情報演算部は、仮想空間内の仮想物体に掛かる力を、仮想物体表面に垂直な方向の力と水平な方向の力とに分解し、水平な方向の力と、皮膚感覚生成用データにおける摩擦係数値と、摩擦力・帯電量変換用データとに基づいて触覚呈示の帯電量を算出するようにしたので、操作者に対して確実に皮膚感覚のフィードバックを与えることができる。
【0022】
なお、本願発明はその発明の範囲内において、実施の形態の任意の構成要素の変形、もしくは実施の形態の任意の構成要素の省略が可能である。
【符号の説明】
【0023】
1 本体、2 パッド、3 指、100 3次元情報入出力デバイス、101 センサ、102 アクチュエータ、103 帯電フィルム、200 制御装置、210 3次元情報データベース(3次元情報格納部)、211 仮想空間生成用データ、212 反力生成用データ、213 皮膚感覚生成用データ、214 摩擦力・帯電量変換用データ、220 帯電量演算及び仮想空間生成部、221 帯電量演算部(触覚情報演算部)、230 触力覚情報制御部(触覚情報制御部)、231 位置・力検出部、232 反力出力部、233 皮膚感覚出力部。
【特許請求の範囲】
【請求項1】
3次元入力と力覚呈示と触覚呈示とを行う3次元情報入出力デバイスと、
仮想空間生成用データと、当該仮想空間における仮想物体表面の摩擦係数値を示す皮膚感覚生成用データと、反力生成用データとを有する3次元情報格納部と、
前記3次元情報入出力デバイスによる3次元入力に基づき、前記皮膚感覚生成用データを用いて、前記3次元情報入出力デバイスへの前記触覚呈示の制御量を演算する触覚情報演算部と、
前記3次元情報入出力デバイスからの信号を前記触覚情報演算部に送出すると共に、当該触覚情報演算部の演算結果に基づいて前記3次元情報入出力デバイスの制御を行う触覚情報制御部とを備え、
前記3次元情報入出力デバイスは、触覚呈示を帯電量の制御で行うことを特徴とする3次元空間座標入力装置。
【請求項2】
3次元情報格納部は、摩擦係数と触覚呈示量の関係を定めた摩擦力・帯電量変換用データを備え、
触覚情報演算部は、仮想空間内の仮想物体に掛かる力を、当該仮想物体表面に垂直な方向の力と水平な方向の力とに分解し、当該水平な方向の力と、皮膚感覚生成用データにおける摩擦係数値と、前記摩擦力・帯電量変換用データとに基づいて触覚呈示の帯電量を算出することを特徴とする請求項1記載の3次元空間座標入力装置。
【請求項1】
3次元入力と力覚呈示と触覚呈示とを行う3次元情報入出力デバイスと、
仮想空間生成用データと、当該仮想空間における仮想物体表面の摩擦係数値を示す皮膚感覚生成用データと、反力生成用データとを有する3次元情報格納部と、
前記3次元情報入出力デバイスによる3次元入力に基づき、前記皮膚感覚生成用データを用いて、前記3次元情報入出力デバイスへの前記触覚呈示の制御量を演算する触覚情報演算部と、
前記3次元情報入出力デバイスからの信号を前記触覚情報演算部に送出すると共に、当該触覚情報演算部の演算結果に基づいて前記3次元情報入出力デバイスの制御を行う触覚情報制御部とを備え、
前記3次元情報入出力デバイスは、触覚呈示を帯電量の制御で行うことを特徴とする3次元空間座標入力装置。
【請求項2】
3次元情報格納部は、摩擦係数と触覚呈示量の関係を定めた摩擦力・帯電量変換用データを備え、
触覚情報演算部は、仮想空間内の仮想物体に掛かる力を、当該仮想物体表面に垂直な方向の力と水平な方向の力とに分解し、当該水平な方向の力と、皮膚感覚生成用データにおける摩擦係数値と、前記摩擦力・帯電量変換用データとに基づいて触覚呈示の帯電量を算出することを特徴とする請求項1記載の3次元空間座標入力装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−114323(P2013−114323A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−257729(P2011−257729)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]