
3次元範囲計測システム、3次元範囲計測プログラムおよび記録媒体
【課題】自動車等の運転者の3次元的な認知領域の広がりを計測することができる3次元範囲計測システム等を提供する。
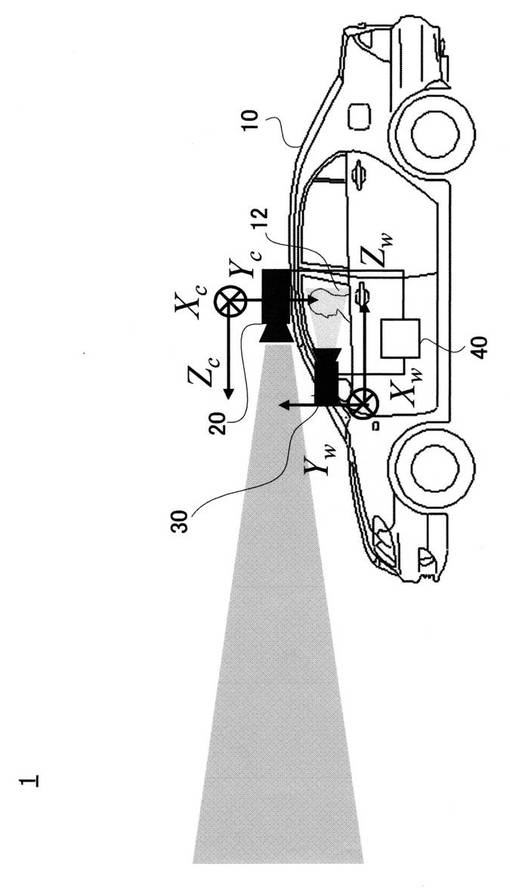
【解決手段】3次元範囲計測システム1は車両10の車外環境をステレオ計測する2台の広角レンズカメラを有する車外カメラ20と、運転者12の視線方向を計測する車内カメラ30と、車外カメラ20および車内カメラ30に接続されたPC40とから構成されている。車外カメラ20は等距離射影式の魚眼レンズカメラを用い、透視投影モデルに変換しない二眼ステレオ法を考案した。車内カメラ30の座標系XwYwZwを世界座標系とし車外カメラ20の座標系XcYcZcを車内カメラ30の座標系に合わせた。車外カメラ20の計測から得られた車外環境の画像上の隣接する3つの画素毎に三角形パッチを構成する。車内カメラ30の計測から得られた運転者の視直線と三角形パッチとの交点を運転者12の注視点の3次元座標とした。
【解決手段】3次元範囲計測システム1は車両10の車外環境をステレオ計測する2台の広角レンズカメラを有する車外カメラ20と、運転者12の視線方向を計測する車内カメラ30と、車外カメラ20および車内カメラ30に接続されたPC40とから構成されている。車外カメラ20は等距離射影式の魚眼レンズカメラを用い、透視投影モデルに変換しない二眼ステレオ法を考案した。車内カメラ30の座標系XwYwZwを世界座標系とし車外カメラ20の座標系XcYcZcを車内カメラ30の座標系に合わせた。車外カメラ20の計測から得られた車外環境の画像上の隣接する3つの画素毎に三角形パッチを構成する。車内カメラ30の計測から得られた運転者の視直線と三角形パッチとの交点を運転者12の注視点の3次元座標とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の運転者から見える3次元空間の範囲を計測する3次元範囲計測システム等に関する。
【背景技術】
【0002】
一般に、人の視野とは目を動かさずに見える範囲とされている。目を向けている点(注視点)方向の角度を0°とすると、注視点から左右13°(視角26°。中心視)の範囲では視力は約1.2と良好であるが、視野の周辺部の範囲(周辺視野)では視力は約0.1と急に低くなっている。周辺視野で物体を認知することができる範囲を有効視野と呼ぶ。言い換えれば、有効視野とは周辺視野の内、認知に寄与する部分のことを言う。有効視野は年齢、性別等により異なると言われている。自動車等の運転者のように、動いている状態で車外を見る場合、有効視野が重要となる。この場合、有効視野は年齢、性別等に加えて、走行状況、道路状況、心理状態、個人差により異なると言われている。
【0003】
一般に人の有効視野を計測するためには、被験者にスクリーン中の固視点を注視してもらいながら、視野内のスクリーンに映る様々な視覚刺激の中からターゲット刺激を検出することにより測定される(非特許文献1参照)。自由な眼球運動下での有効視野計測として制限視野法(非特許文献2参照)があり、その自動車運転時の計測への応用(非特許文献3参照)も提案されている。例えば、Seeing Machines(登録商標)社製のfaceLAB等の車内ステレオカメラ装置を用いて自動車の運転者の眼球回転角度(縦方向回転のピッチ角成分および横方向回転のヨー角成分)の測定が行われていた。
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した非特許文献1および2に記載された有効視野を測定する方法では、スクリーンといった平面内または円筒上での注視方向のみを対象としていた。このため、その奥行きを一切考慮していなかった。運転者が注視する対象物と自動車との間の距離は様々に変化し一定ではないため、遠近を含む距離を測定する必要がある。しかし、上述した車内ステレオカメラ装置を用いた方法では運転者の視線方向(直線)を2次元的にしか測定できず、奥行きを含めた3次元的な認知領域の広がりを計測することができないという問題があった。
【0005】
そこで、本発明の目的は上記問題を解決するためになされたものであり、自動車等の運転者の3次元的な認知領域の広がりを計測することができる3次元範囲計測システム等を提供することにある。
【0006】
本発明の第2の目的は、心理状態等の心的要因によって変化する3次元的な有効視野の時間的変化を測定することができる3次元範囲計測システム等を提供することにある。
【0007】
本発明の第3の目的は、車外の物体(ハザード)を運転者が注視したのか否かを特定することができると共に所定の警告を発することができ、有効視野を表示する等の運転支援を行うことができる3次元範囲計測システム等を提供することにある。
【課題を解決するための手段】
【0008】
この発明の3次元範囲計測システムは、車両の運転者から見える3次元空間の範囲を計測する3次元範囲計測システムであって、車外環境をステレオ計測する2台の広角レンズカメラを有する車外撮像器と、運転者の視線方向を計測する車内撮像器と、該車外撮像器及び該車内撮像器に接続されたコンピュータとを備え、コンピュータが、前記車内撮像器の座標系を世界座標系とし前記車外撮像器の座標系を該車内撮像器の座標系に合わせ、該車内撮像器の計測から得られた運転者の視直線と該車外撮像器の計測から得られた車外環境の画像上の隣接する3つの画素毎に設定された三角形パッチとの交点を運転者の注視点の3次元座標とすることにより、運転者から見える3次元空間の範囲を測定することを特徴とする。
【0009】
ここで、この発明の3次元範囲計測システムにおいて、前記車外撮像器は車外に設置された等距離射影方式の左右の魚眼レンズカメラを広角レンズカメラとして用い、前記車内撮像器は車内に設置されたイメージセンサを用いて運転者の両眼球の回転角度及び位置座標を取得することができる。
【0010】
ここで、この発明の3次元範囲計測システムにおいて、前記コンピュータは、前記車外撮像器を用いて撮像された左右の魚眼レンズカメラによる左右の車外画像を記録した車外画像記録部と、前記車内撮像器を用いて取得された、世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とを対応させて記録した視線情報記録部と、前記車外画像記録部に記録された左右の車外画像に対して所定の条件を満たす画素の集合としてエピポーラ線を求め、該エピポーラ線上を探索することにより左右の車外画像における対応点を求める対応点マッチング手段と、前記対応点マッチング手段により対応点が求められた画素については該画素に投影される車外の3次元空間における点の位置座標を求めると共に、対応点が求められなかった画素については該画素の周辺画素から補間を行うことにより該画素に投影される車外の3次元空間における点の座標を求める3次元座標算出手段と、前記3次元座標算出手段により求められた車外の3次元空間における点の座標をユークリッド変換して前記視線情報記録部に記録された世界座標系における所定の点の座標とする際の変換パラメータを求める変換パラメータ算出手段と、前記変換パラメータ算出手段により求められた変換パラメータを用いて、前記車外画像記録部に記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報記録部に記録する画素座標算出手段と、前記画素座標情報記録部に記録された隣り合う3つの画素毎に所定の方式で三角形パッチを構成し、該三角形パッチに関する情報を三角形パッチ情報記録部に記録する三角形パッチ構成手段と、前記視線情報記録部に記録された世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とから得られる運転者の視直線と、前記三角形パッチ情報記録部に記録された三角形パッチとの交点を有する三角形パッチを所定の方法により求め、該交点を運転者の注視点の3次元座標とし、該注視点の位置座標を時間の経過と共に注視点位置座標記録部に記録する交点算出手段とを備えることができる。
【0011】
ここで、この発明の3次元範囲計測システムにおいて、前記注視点位置座標記録部に記録された所定の時間分の注視点座標から構成される3次元凸包を運転手の有効視空間として求める有効視空間算出手段をさらに備えることができる。
【0012】
ここで、この発明の3次元範囲計測システムにおいて、前記有効視空間算出手段により算出された有効視空間の路面上への正射影像を求め、前記コンピュータに接続された表示装置に該正射影像を所定の方式で表示する有効視空間表示手段をさらに備えることができる。
【0013】
ここで、この発明の3次元範囲計測システムにおいて、車両の運転者から見える3次元空間の範囲内に存在するハザードの座標を検出するハザード座標検出手段と、前記ハザード座標検出手段により検出されたハザードの座標と前記注視点位置座標記録部に記録された所定の時間分の注視点座標とに基づき、所定の警告を発する警告手段とをさらに備えることができる。
【0014】
この発明の3次元範囲計測プログラムは、車両の運転者から見える3次元空間の範囲を計測する3次元範囲計測プログラムであって、車外環境をステレオ計測する2台の広角レンズカメラを有する車外撮像器と、運転者の視線方向を計測する車内撮像器と、該車外撮像器及び該車内撮像器に接続されたコンピュータとを用いるものであり、コンピュータに、前記車内撮像器の座標系を世界座標系とし前記車外撮像器の座標系を該車内撮像器の座標系に合わせ、該車内撮像器の計測から得られた運転者の視直線と該車外撮像器の計測から得られた車外環境の画像上の隣接する3つの画素毎に設定された三角形パッチとの交点を運転者の注視点の3次元座標とすることにより、運転者から見える3次元空間の範囲の測定を実行させるための3次元範囲計測プログラムである。
【0015】
ここで、この発明の3次元範囲計測プログラムにおいて、前記車外撮像器は車外に設置された等距離射影方式の左右の魚眼レンズカメラを広角レンズカメラとして用い、前記車内撮像器は車内に設置されたイメージセンサを用いて運転者の両眼球の回転角度及び位置座標を取得することができる。
【0016】
ここで、この発明の3次元範囲計測プログラムにおいて、前記コンピュータは、前記車外撮像器を用いて撮像された左右の魚眼レンズカメラによる左右の車外画像を記録した車外画像記録部と、前記車内撮像器を用いて取得された、世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とを対応させて記録した視線情報記録部とをさらに用い、コンピュータに、前記車外画像記録部に記録された左右の車外画像に対して所定の条件を満たす画素の集合としてエピポーラ線を求め、該エピポーラ線上を探索することにより左右の車外画像における対応点を求める対応点マッチングステップ、前記対応点マッチングステップで対応点が求められた画素については該画素に投影される車外の3次元空間における点の位置座標を求めると共に、対応点が求められなかった画素については該画素の周辺画素から補間を行うことにより該画素に投影される車外の3次元空間における点の座標を求める3次元座標算出ステップ、前記3次元座標算出ステップで求められた車外の3次元空間における点の座標をユークリッド変換して前記視線情報記録部に記録された世界座標系における所定の点の座標とする際の変換パラメータを求める変換パラメータ算出ステップ、前記変換パラメータ算出ステップで求められた変換パラメータを用いて、前記車外画像記録部に記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報記録部に記録する画素座標算出ステップ、前記画素座標情報記録部に記録された隣り合う3つの画素毎に所定の方式で三角形パッチを構成し、該三角形パッチに関する情報を三角形パッチ情報記録部に記録する三角形パッチ構成ステップ、前記視線情報記録部に記録された世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とから得られる運転者の視直線と、前記三角形パッチ情報記録部に記録された三角形パッチとの交点を有する三角形パッチを所定の方法により求め、該交点を運転者の注視点の3次元座標とし、該注視点の位置座標を時間の経過と共に注視点位置座標記録部に記録する交点算出ステップを実行させることができる。
【0017】
ここで、この発明の3次元範囲計測プログラムにおいて、前記注視点位置座標記録部に記録された所定の時間分の注視点座標から構成される3次元凸包を運転手の有効視空間として求める有効視空間算出ステップをさらに備えることができる。
【0018】
ここで、この発明の3次元範囲計測プログラムにおいて、前記有効視空間算出ステップにより算出された有効視空間の路面上への正射影像を求め、前記コンピュータに接続された表示装置に該正射影像を所定の方式で表示する有効視空間表示ステップをさらに備えることができる。
【0019】
ここで、この発明の3次元範囲計測プログラムにおいて、車両の運転者から見える3次元空間の範囲内に存在するハザードの座標を検出するハザード座標検出ステップと、前記ハザード座標検出ステップにより検出されたハザードの座標と前記注視点位置座標記録部に記録された所定の時間分の注視点座標とに基づき、所定の警告を発する警告ステップとをさらに備えることができる。
【0020】
この発明の記録媒体は、本発明のいずれかの3次元範囲計測プログラムを記録したコンピュータ読取り可能な記録媒体である。
【発明の効果】
【0021】
本発明の3次元範囲計測システム等によれば、車内カメラにより運転者の顔画像が撮像されて視線計測処理が行われ、運転者の眼球位置座標および眼球回転角が求められる。並行して車外カメラにより車外画像が撮像されて車外ステレオ処理が実行される。車内カメラの座標系と車外カメラの座標系とは異なるため、車内カメラの座標系XwYwZwを世界座標系とし車外カメラの座標系XcYcZcを車内カメラ30の座標系に合わせた。本発明で用いる二組の魚眼ステレオカメラ(車内用、車外用)には共通する撮影領域がないため、予め運転者が車両の座席に座った状態で所定の位置においたマーカーを注目してもらい、その時に車内カメラから取得できる運転者の視線方向の情報と上記マーカーの魚眼カメラ座標系における3次元座標とから、カメラ座標系を統合する校正用パラメータを求める手法を考案した。車外カメラの計測から得られた車外環境の画像上の隣接する3つの画素毎に三角形パッチを構成する。次に、車内カメラの計測から得られた運転者の視直線と三角形パッチとの交点を運転者の注視点の3次元座標とする。本発明では、等距離射影式の魚眼レンズカメラによる、透視投影モデルに変換しない二眼ステレオ法を考案した。車外画像DBに記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報DBに記録する。画素座標情報DBに記録された隣り合う3つの画素毎に所定の方式で三角形パッチを構成し、当該三角形パッチに関する情報を三角形パッチ情報DBに記録する。視線情報DBに記録された世界座標系における所定の点を注視する際の運転者の両眼球の眼球回転角度および眼球位置座標と当該所定の点の座標とから得られる運転者の視直線と、三角形パッチ情報DBに記録された三角形パッチとの交点を有する三角形パッチを所定の方法により求め、当該交点を運転者の注視点の3次元座標とした。以上のようにして、本発明の3次元範囲計測システム等によれば、車両の運転者の3次元的な認知領域の広がりを計測することができる3次元範囲計測システム等を提供することができるという効果がある。
【0022】
本発明の3次元範囲計測システム等によれば、時系列の注視点群から3次元凸包を生成することにより、その領域を有効視空間とする。3次元凸包は逐次添加法によって求めることができる。この結果、運転者12の心理状態等の心的要因によって変化する3次元的な有効視野(有効視空間)の時間的変化を測定することができる3次元範囲計測システム等を提供することができるという効果がある。
【0023】
本発明の3次元範囲計測システム等によれば、有効視空間算出部により算出された有効視空間の路面上への正射影像を求め、コンピュータに接続された表示装置に当該正射影像を所定の方式で表示する。この結果、水平視野角、垂直視野角、奥行きを映像で表示し、色による有効視空間の大きさ表現、見落としハザードの表示を行うことができるという効果がある。
【0024】
本発明の3次元範囲計測システム等によれば、ハザード座標検出部により検出されたハザードの座標と注視点位置座標DBに記録された所定の時間分の注視点座標とを用いることにより、種々の正確な警告を発することができる。このため、本発明の3次元範囲計測システムを車両に搭載することにより、より安全性が高く且つ安価な車両を提供することが可能となる。
【図面の簡単な説明】
【0025】
【図1】本発明の実施例1および他の実施例における3次元範囲計測システム1の概要を示す図である。
【図2】本発明の3次元範囲計測プログラムの処理の流れを示すフローチャートである。
【図3】本発明の3次元範囲計測プログラムの動作環境を示す図である。
【図4】本発明の3次元範囲計測プログラムを構成する二眼ステレオ法で用いる魚眼ステレオの投影モデルを示す図である。
【図5】魚眼レンズカメラ25Lおよび25Rを車両10の屋根に設置した一例を示す図である。
【図6】車内カメラ器30の設置例を示す図である。
【図7】車内カメラ30と車外カメラ20との位置関係を示す図である。
【図8】視線計測カメラ30により運転者12の視線方向を計測する状況を示す図である。
【図9】運転者12の視直線Sと車外三角形パッチとの交点の導出を説明するための図である。
【図10】本発明の3次元範囲計測プログラムを構成する二眼ステレオ法の処理の流れを示すフローチャートである。
【図11】本発明の実施例2における有効視空間を説明するための図である。
【図12】逐次添加法によって3次元凸包を求めるアルゴリズム(非特許文献7参照)を示すフローチャートである。
【図13】逐次追加の様子を例示する図である。
【図14】本発明の実施例3における有効視空間の表示例を示す図である。
【図15】本発明のプログラムを実行するコンピュータ10の内部回路180を示すブロック図である。
【発明を実施するための最良の形態】
【0026】
以下、実施例について図面を参照して詳細に説明する。
【実施例1】
【0027】
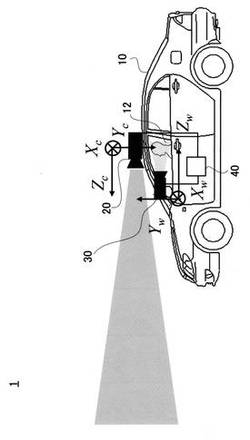
図1は、本発明の実施例1および他の実施例における3次元範囲計測システム1の概要を示す。図1において、符号10は自動車等の車両、12は車両10を運転する運転者、20は車両10の車外環境をステレオ計測する2台の広角レンズカメラを有する車外カメラ(車外撮像器。座標は車両10の進行方向がZc軸、Zc軸に垂直にXc軸およびYc軸)、30は運転者12の視線方向を計測する車内カメラ(車内撮像器。座標は運転者方向がZw軸、Zw軸に垂直にXw軸およびYw軸)、40は車外カメラ20および車内カメラ30に接続されたパーソナルコンピュータ(PC)等のコンピュータである。3次元範囲計測システム1は車両10の運転者12から見える3次元空間の範囲を計測する。
【0028】
図1に示されるように車両10の屋根の上に設置された車外カメラ20の広角レンズカメラは魚眼レンズカメラであることが好適である。以下では車外カメラ20のカメラは魚眼レンズカメラであるものとして説明していくが、魚眼レンズカメラに限定されるものではなく、車外の対象物と車両10との間の距離が遠い(30m以上の)場合は、むしろ広角レンズカメラの方がよい場合もある。図1に示される車内カメラ20は、車内に設置されたCCD等のイメージセンサを用いて運転者12の両眼球(不図示)の回転角および位置座標を取得する。
【0029】
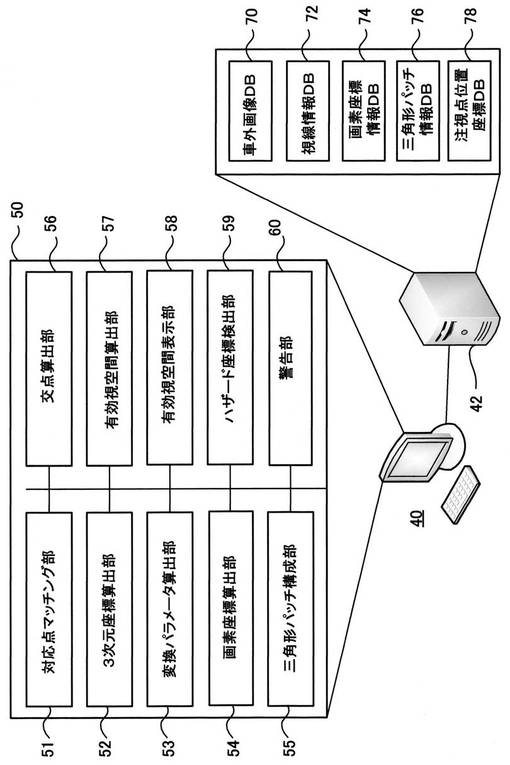
図2は、本発明の3次元範囲計測プログラムの処理の流れをフローチャートで示す。図2で図1と同じ符号を付した個所は同じ要素を示すため、説明は省略する。図2において、符号42はPC40と接続され3次元範囲計測プログラムが使用する種々のデータが記録された記録装置である。図3は、本発明の3次元範囲計測プログラムの動作環境を示す。図3において、符号50はPC40上で実行される3次元範囲計測プログラムの機能を示す機能ブロック、42は図2で説明した記録装置である。機能ブロック50内の諸機能はソフトウェアにより実現されているが、一部はハードウェアにより実現してもよい。以下、図1ないし図3の内容を適宜引用しながら本発明の3次元範囲計測プログラムの動作を説明していく。
【0030】
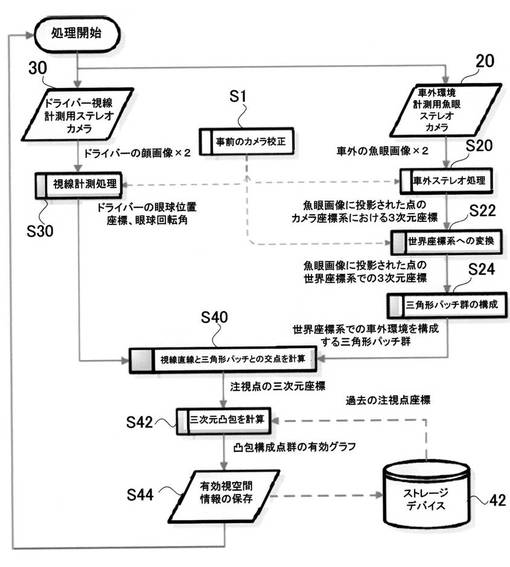
まず、本発明の3次元範囲計測プログラムの概要について説明する。図2に示されるように、車内カメラ30により運転者12の顔画像が撮像されて視線計測処理が行われ、運転者12の眼球位置座標および眼球回転角が求められる(ステップS30)。並行して車外カメラ20により車外画像が撮像されて車外ステレオ処理が実行される(ステップS20)。ここで、図1に示されるように車内カメラ30は座標系XwYwZwを有しており、一方車外カメラ20は別の座標系XcYcZcを有している。そこで、運転者12の視線方向の情報と車外の3次元環境の情報とを統合するためには、左右の各魚眼ステレオカメラの座標系を世界座標系に統一させる必要がある。本発明の3次元範囲計測プログラム等では、車内カメラ30の座標系XwYwZwを世界座標系とし車外カメラ20の座標系XcYcZcを車内カメラ30の座標系に合わせた(ステップS22)。
【0031】
本発明で用いる二組の魚眼ステレオカメラ(車内用、車外用)には共通する撮影領域がないため、一般的な校正器具を用いたカメラ校正は不可能である。そこで、予め運転者12が車両10の座席に座った状態で所定の位置においたマーカーを注目してもらい、その時に車内カメラ30(faceLAB) から取得できる運転者12の視線方向の情報と上記マーカーの魚眼カメラ座標系における3次元座標とから、カメラ座標系を統合する校正用パラメータを求める手法を考案した。詳細は後述する。図2に示されるように、車外カメラ20の計測から得られた車外環境の画像上の隣接する3つの画素毎に三角形パッチを構成する(ステップS24)。次に、車内カメラ30の計測から得られた運転者の視直線と三角形パッチとの交点を運転者12の注視点の3次元座標とする(ステップS40)。3次元的な有効視野の時間的変化を示す3次元凸包(詳細は後述)を計算し(ステップS42)、有効視空間(詳細は後述)情報を記録装置42に記録(ステップS44)した後、上述した処理を繰返す。
【0032】
次に、本発明の3次元範囲計測プログラムの詳細について説明する。上述した車外ステレオ処理(ステップS20)は車外環境の魚眼ステレオカメラによる計測である。魚眼ステレオカメラで撮影された画像を透視投影モデルの画像に変換する研究はいくつかなされており(非特許文献4、5参照)、魚眼モデルの画像を透視投影モデルの画像に変換することでステレオ計測を行っている(非特許文献6)。しかし、非特許文献4〜6に記載された方法では画像を変換することで魚眼モデルの画像の周辺部が欠落してしまうといった問題があった。そこで、等距離射影式の魚眼レンズカメラによる、透視投影モデルに変換しない二眼ステレオ法(主としてステップ22からS40に対応)を考案した。
【0033】
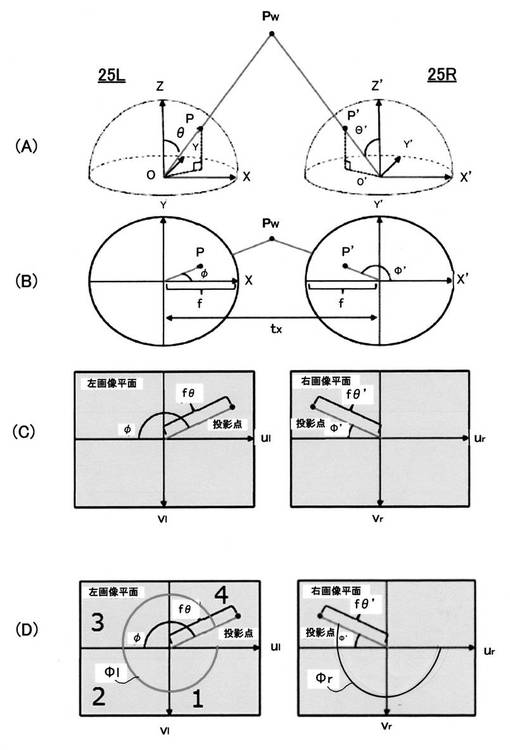
図4は、本発明の3次元範囲計測プログラムを構成する二眼ステレオ法で用いる魚眼ステレオの投影モデルを示す。以下では、「魚眼レンズ」は「魚眼レンズカメラ」を含む意味で用いる。図4に示されるように、車外カメラ20の左側魚眼レンズ25L(中心O、座標XYZ)と右側魚眼レンズ25R(中心O’、座標X’Y’Z‘)とについて、図4(A)は俯瞰図、図4(B)は魚眼レンズ25Lおよび26Rを上から見た平面図、図4(C)は魚眼レンズ25Lおよび26Rを下(カメラの中)から見た平面図である。図4(D)は図4(C)の説明用の図である。図4(A)、(B)において、3次元空間中の任意の点をPw とし、各魚眼レンズ25Lおよび25Rにその点を投影した点をそれぞれP、P’とする。θ とθ’とは各々左右の魚眼レンズ25Lおよび25Rに対する天頂角を示し、φとφ’とは方位角を示す。fとf’と各々左右の魚眼レンズ25Lおよび25Rのは焦点距離であり、球面モデルの半径を表す。図4(C)左側図で右方向が正方向のul軸は左画像の光軸を原点とする横方向の画像座標軸であり、下方向が正方向のvl軸は左画像の光軸を原点とする縦方向の画像座標軸である。同様に、図4(C)右側図で右方向が正方向のur軸は右画像の光軸を原点とする横方向の画像座標軸であり、下方向が正方向のvr軸は右画像の光軸を原点とする縦方向の画像座標軸である。
【0034】
図4(C)でvl軸が画像の下向きになっているのは、本発明の3次元範囲計測プログラム中で画像のデータが収まっている配列に起因する。一般的に画像はラスター操作の順に配列に収まっており、左上角から水平方向に右へ1行いったら、1マス下の一番左から水平方向に右へ1行き、さらに1マス下の一番左から水平方向に右へ1行というように、データを保持する。そのため、ul軸は右向き、vl軸は下向きにされることが多い。さらに、座標の原点を画像の左上角ではなく、画像の中心に持つと魚眼レンズの3次元座標(上記のXYZ等)のXYと画像のulvlが同じz軸上に原点があることになり、計算がしやすくなるため、その分だけ原点をシフトしている。
【0035】
上述したように、図4(B)のY軸と図4(C)のvl軸とは軸の向きが異なっている。このため、その方位角φの場所もXY平面とulvl平面とでは変わってくる。方位角φは右手座標系における横軸(ul軸、X軸)からの正の回転角を表している。XY平面であれば図4(B)に示されるようにX軸の正の位置からY軸の正の位置へ向かってとった角度になる。ulvl平面においても図4(C)に示されるようにul軸の正の位置からvl軸の正の位置へ向かってとった角度になる。ulvl平面においてもφはul軸との正の回転角度を意味するため、本来は図4(C)に示されるφは曲線の引き方が180度分だけ足らない。正規の方位角では図4(D)に示されるように、左図のφlは320度位、右図のφrは210度位になる。しかし、φは後述するようにarctan(vl/ul)によって求めている。arctanの周期はπ(=180度)であるため、φlの第3象限から第4象限までの角度をαとすると、tanφl=tan(π+α)=tanαとなる。このため、第3象限および第4象限の場合はul軸の負の部分からの正の回転角度だけとしても計算結果は180度多い方位角と同じ値になる。このため、図4(C)中のφの場所は180度分だけ短く書かれている。図4(C)の右図も同様であるため、説明は省略する。
【0036】
以上の準備に基づき、天頂角と方位角は式1のように得られる。
【0037】
【数1】

【0038】
左右の魚眼レンズカメラ25Lおよび25Rによる投影点PおよびP’の位置ベクトルをp、p’としたとき、それぞれを天頂角θ、θ’と方位角φ、φ’とを用いて表すと式2のようになる。
【0039】
【数2】
【0040】
3次元空間中の点Pwは左右の投影点の位置ベクトルを定数倍した所にあり、その位置ベクトルをPwは式3のように表すことができる。
【0041】
【数3】
【0042】
但し、klとkrとは任意の正の実数とする。また本発明では左右の魚眼レンズカメラ25Lおよび25Rの向きおよび高さを平行と仮定するため、両カメラ間距離をX軸方向にtxだけ離れているものとし、次の条件(式4)を与える。
【0043】
【数4】
【0044】
従って、3次元空間中の点Pwは式5のようにして求まる。
【0045】
【数5】
【0046】
魚眼投影画像でステレオマッチングするにあたり、問題となってくるのが対応点マッチングを行なう際のエピポーラ線である。図4(A)で中心O−点Pw−中心O’を結ぶ平面がエピポーラ平面であり、エピポーラ平面と魚眼レンズ25L、25Rとの交点P、P’がエピポールとなり、魚眼レンズ25L、25R上で各エピポールP、P’を結んだ曲線がエピポーラ線となる。つまり、魚眼画像のエピポーラ線は非直線であると共にその方程式は画素毎に異なる。エピポーラ線は次の条件式を満たす画素の集合として求める。
【0047】
【数6】
【0048】
このエピポーラ線上を探索して対応点マッチングを行う。図3に戻り、符号70は車外カメラ20を用いて撮像された左右の魚眼レンズカメラ25Lおよび25Rによる左右の車外画像を記録した車外画像データべースDB(車外画像記録部)である。図3の機能ブロック50に示される対応点マッチング部51(対応点マッチング手段)は、車外画像DB70に記録された左右の車外画像に対して式6(所定の条件)を満たす画素の集合としてエピポーラ線を求め、当該エピポーラ線上を探索することにより左右の車外画像における対応点を求める。
【0049】
以上の処理によって左右の魚眼画像で対応点が得られた画素(ul、vl) についてそこに投影される点の3次元座標Pwを式5を用いて求めることができる。エッジやテクスチャのあるところはこのようにして3次元座標を得られる。しかし、対応点が得られない画素(例えば道路など他の画素と区別がつかない画素)については、その周辺の画素から補間をして、画像上の全ての画素について投影される点の3次元座標を計算する。図3の機能ブロック50に示される3次元座標算出部52(3次元座標算出手段)は、対応点マッチング部51により対応点が求められた画素については当該画素に投影される車外の3次元空間における点の位置座標を求めると共に、対応点が求められなかった画素については当該画素の周辺画素から補間を行うことにより当該画素に投影される車外の3次元空間における点の座標を求める。
【0050】
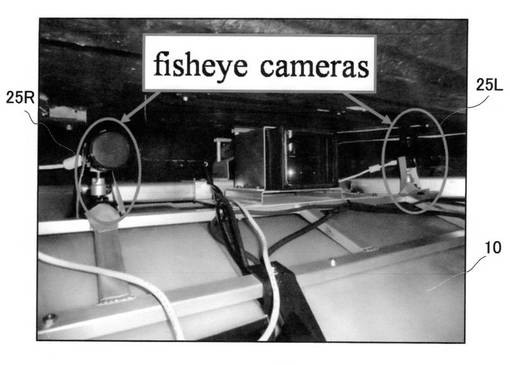
図5は、魚眼レンズカメラ25Lおよび25Rを車両10の屋根に設置した一例を示す。図5に示されるように、車外カメラ20は車両10の屋根の上に2台の魚眼レンズカメラを左右に分けて設置することが好適である。しかし、上記設置位置は屋根の上に限定されるものではなく、ボンネットの上または両サイドミラーの上等であってもよく、特に設置位置が特定されるものではない。なお、本明細書では魚眼レンズとしてFUJIFILM(登録商標)社製のFE185C057HA−1を使用したが、この魚眼レンズに限定されるものではない。
【0051】
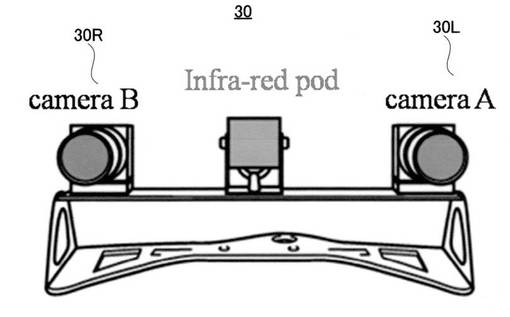
図6は、車内カメラ30の設置例を示す。車内カメラ20の設置位置は例えばダッシュボードの上に設置することが好適であるが、運転の邪魔にならない所であれば他の位置であってもよい。車内カメラ20はコンピュータ40にUSB等で接続された低コストのいわゆるウェブカメラとし、ドライバモニタリングシステムとしては、例えばTrackEye(登録商標)と呼ばれるソフトウェアを用いることができる。TrackEye(登録商標)は運転者12の顔および目を検知し、運転者12の注視点の測定を行う。上述の例では車内カメラ20としてTrackEye(登録商標)を例示したが、1秒あたりのフレーム数がより高い、例えばFaceLab systemを用いる方が好適である。
【0052】
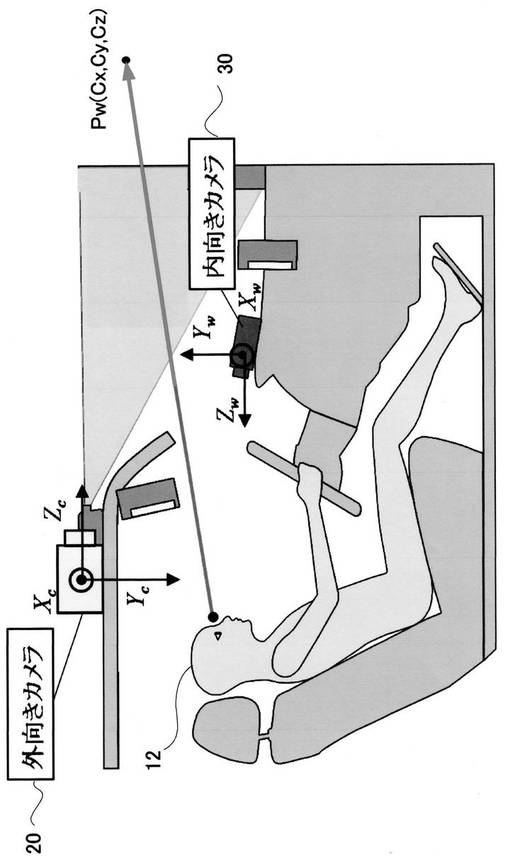
図7は、車内カメラ30と車外カメラ20との位置関係を示す。図7で図1と同じ符号を付した個所は同じ要素を示すため、説明は省略する。図7で、点Pw(座標Cx,Cy,Cz)は図4で説明した3次元空間における点であり、運転者12が注視している注視点である。
【0053】
次に、運転者12の注視点Pwの3次元位置計測について説明する。運転者12の注視点Pwの3次元位置計測は、車外カメラ20座標系XcYcZcと車内カメラ30座標系XwYwZwとの統一、運転者12の視直線と車外三角形パッチ(後述)との交点の導出から成り立っている。以下、それぞれの原理を述べる。加えて、両カメラの座標系を統合するために事前に必要となる変換行列の導出方法についても説明する。
【0054】
車外カメラ20座標系XcYcZcと車内カメラ30座標系XwYwZwとの統一.
以下では、車外カメラ20を魚眼ステレオカメラ20と呼び、車内カメラ30を視線計測カメラ30と呼ぶ。車外環境を撮影する魚眼ステレオカメラ20と視線計測を行う視線計測カメラ30(faceLAB のカメラ)はそれぞれ独立した座標系を持っており、車外の3次元環境と視線方向の情報とを統合させるためには、各ステレオカメラ20および30の座標系を世界座標系に統一させる必要がある。本発明では世界座標系を視線計測カメラ30の座標系とし、魚眼ステレオカメラ20のカメラ座標系を視線計測カメラ30の座標系に合わせる。
【0055】
視線計測カメラ30の座標系XwYwZwでの3次元座標(Wx,Wy,Wz)と魚眼ステレオカメラ20の座標系XcYcZcでの3次元座標(Cx,Cy,Cz)との関係は式7のようにユークリッド変換で表す。
【0056】
【数7】
【0057】
あとは変換のパラメータp1、・・・、p12が求まればよい。しかし、本発明で用いる二組のステレオカメラ(車内カメラ30用、車外カメラ20用)には共通する撮影領域がないため、一般的な校正器具を用いたカメラ校正は不可能である。そこで、予め運転者12が座席に座った状態で所定のマーカーに注目してもらい、その時に視線計測カメラ30から取得できる運転者12の視線方向の情報と上記マーカーの魚眼カメラ20座標系における3次元座標とから、カメラ座標系を統合する校正用パラメータを求める手法を以下のように考案した。つまり、二つのステレオカメラ20および30が校正器具を共通して撮影できないため、代わりに運転者12(または作業者)の視線データを介して両ステレオカメラ20および30の情報をつなげる役割を持たせる。上記マーカーは車両10のボンネットまたはフロントガラスに設置した。
【0058】
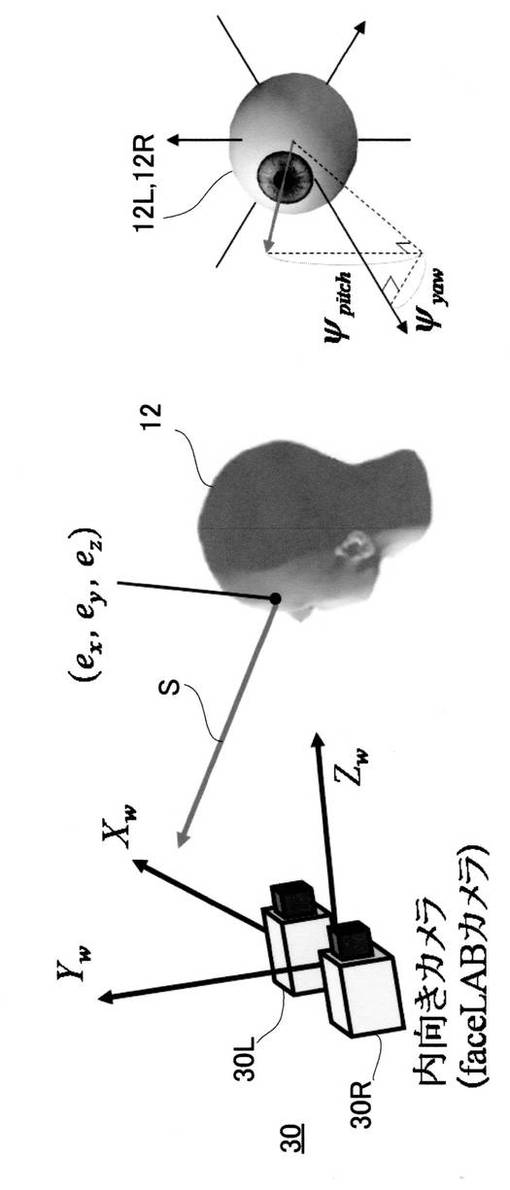
図8は、視線計測カメラ30により運転者12の視線方向を計測する状況を示す。図8で図1および図6と同じ符号を付した個所は同じ要素を示すため、説明は省略する。図8で符号Sは運転者12の視直線、12L、12Rは運転者12の左右の眼球を模式的に示したものであり、Ψpitchは眼球12L等の縦方向回転のピッチ角成分、Ψyawは眼球12L等の横方向回転のヨー角成分であり、(Ψpitch,Ψyaw)で眼球回転角度を構成し、(ex,ey,ez)は眼球12L等の位置座標である。
【0059】
眼球回転角度および眼球12L等の位置座標はいずれも両眼のデータが視線計測カメラ30により得られる。本発明ではこれら両眼のデータに関して各データの平均値をとり, それを眼球回転角度と眼球位置座標と定義する。左眼12Lの眼球回転角度を(Ψpitchl,Ψyawl)、眼球位置座標を(exl,eyl,ezl)とし、右眼12Rの眼球回転角度を(Ψpitchr,Ψyawr)、眼球位置座標を(exr,eyr,ezr)とすると、式8〜12のように表わすことができる。
【0060】
【数8】
【0061】
以上の準備に基づき、カメラ座標系を統合する校正用パラメータを求める手法について説明する。世界座標系における視線を表す直線(視直線S)は眼球位置座標(ex,ey,ez)および視直線Sの方向を示す視線方向ベクトル(nx,ny,nz)より式13のように書くことができる。
【0062】
【数9】
【0063】
式13でkは任意の実数である。視線方向ベクトルは眼球回転角度を用いると, 式14のように書くことができる。
【0064】
【数10】
【0065】
式13および14より、世界座標系における視直線Sの方程式は式15のように書くことができる。以下で、眼球回転角度(Ψpitch,Ψyaw)を簡単に(Ψp,Ψy)と書く場合もある。
【0066】
【数11】
【0067】
式7と式15とを等しいとおくことにより、少なくとも3点(精度を向上させるためにはより多くの点)のデータが取得できれば方程式7を解いてパラメータp1、...,p12を求めることができる。図3に戻り、符号72は視線計測カメラ30を用いて取得された、世界座標系における点Pw(所定の点)を注視する際の運転者12の両眼球12Lおよび12Rの眼球回転角度および眼球位置座標と上記点Pwの座標とを対応させて記録した視線情報DB(視線情報記録部)である。図3の機能ブロック50に示される変換パラメータ算出部53(変換パラメータ算出手段)は、上述のようにして、3次元座標算出部52により求められた車外の3次元空間における点Pwの座標をユークリッド変換して視線情報DB72に記録された世界座標系における点Pwの座標とする際の式7の変換パラメータp1、...,p12を求めることができる。次に、求められた変換パラメータp1、...,p12を式7に用いることにより、魚眼レンズカメラ20の画像上の全ての画素の座標(Cx,Cy,Cz)について世界座標における3次元座標(Wx,Wy,Wz)を計算することができる。図3の機能ブロック50に示される画素座標算出部54(画素座標算出手段)は、変換パラメータ算出部53により求められた式7の変換パラメータp1、...,p12を用いて、車外画像DB70に記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報DB74(画素座標情報記録部)に記録する。
【0068】
運転者12の視直線Sと車外三角形パッチとの交点の導出.
魚眼レンズカメラ20の画像上の全ての画素について3次元座標が計算できたら隣り合う画素ごとに組を作り、三角形パッチを構成する。この時、画像(u,v)のv座標が0または偶数の場合は(u,v)、(u+1,v)、(u,v+1)の三点で、v座標が奇数の場合は(u,v)、(u−1,v)、(u,v−1)の三点で三角形パッチを作るものとする(所定の方式)。この処理により、車両10を取り巻く車外環境を三角形パッチの集合として構成することができる。図3に戻り、図3の機能ブロック50に示される三角形パッチ構成部55(三角形パッチ構成手段)は、画素座標情報DB74に記録された隣り合う3つの画素毎に上述した所定の方式で三角形パッチを構成し、当該三角形パッチに関する情報を三角形パッチ情報DB76(三角形パッチ情報記録部)に記録する。この世界座標系における車外三角形パッチと視直線Sとの交点を運転者12の注視点とする。車両10を取り巻く車外の3次元環境が三角形パッチ群で構成されているため、いずれかの三角形パッチと運12視直線Sとが交点を持つことになる。
【0069】
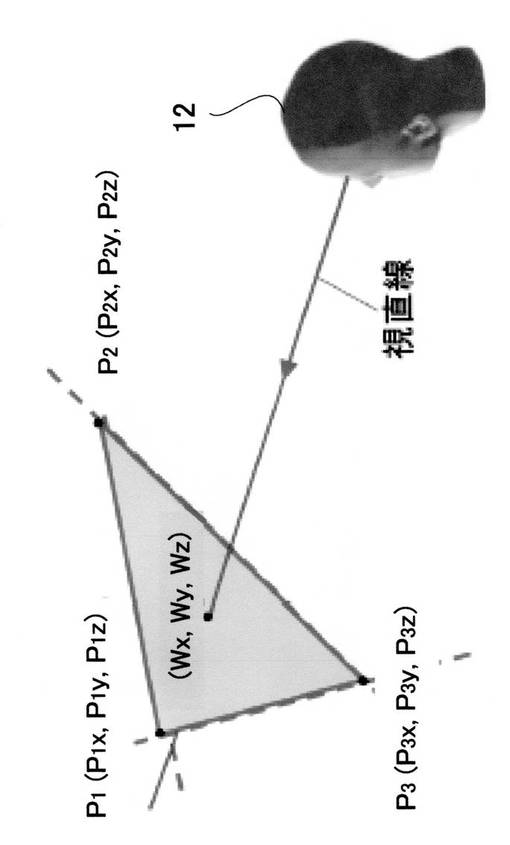
図9は、運転者12の視直線Sと車外三角形パッチとの交点の導出を説明するための図である。図9でp1=(p1x,p1y,p1z)、p2=(p2x,p2y,p2z)p3=(p3x,p3y,p3z)は三角形パッチを個性する3点の3次元座標である。この3点で張られる平面の方程式は式16のようになる。
【0070】
【数12】
【0071】
式15および式16より、式18が得られる。
【0072】
【数13】
【0073】
但し、ベクトルvは式19であるものとする。
【0074】
【数14】
【0075】
ここで、
【0076】
【数15】
【0077】
とすると、クラメールの公式より、
【0078】
【数16】
【0079】
となる。
【0080】
【数17】
【0081】
なので、式23のように書くことができる。
【0082】
【数18】
【0083】
これを解いて、もし上記式17の条件を満たす場合は三角形パッチp1p2p3の内部で視直線Sと交点Pwを持ち、式17の条件を満たさない場合は三角形パッチp1p2p3とは交点を持たない。交点を持つときにはそのときのkを式15に代入することにより、注視点Pwの3次元座標を得ることができる。図3に戻り、図3の機能ブロック50に示される交点算出部56(交点算出手段)は、視線情報DB72に記録された世界座標系における点Pw(所定の点)を注視する際の運転者12の両眼球12L等の眼球回転角度および眼球位置座標と所定の点の座標とから得られる運転者12の視直線Sと、三角形パッチ情報DB76に記録された三角形パッチp1p2p3との交点Pwを有する三角形パッチp1p2p3を上述した運転者12の視直線Sと車外三角形パッチp1p2p3との交点の導出で説明した方法(所定の方法)により求める。当該交点Pwを運転者12の注視点の3次元座標とし、当該注視点の位置座標を時間の経過と共に注視点位置座標DB78(注視点位置座標記録部)に記録する。
【0084】
上述した方法は、3点の座標と視線方向ベクトルSから立てた式18とをクラメールの公式で解くことにより、交点を持つかどうか(パラメータs、t)と交点座標のパラメータkとを同時に求めている。これとは別に、平面の方程式を求めてから交点座標を導出し、その後で当該交点が三角形パッチ内にあるかどうかを調べる方法もある。図9に示される三角形パッチp1p2p3を三角形パッチABCとする。A=(ax,ay,az)、B=(bx,by,bz)C=(cx,cy,cz)とする。点Pwは同じ座標のままでP(Wx,Wy,Wz)とする。世界座標系における空間中の三点(A,B,C)を含む平面の方程式は式24のように書くことができる。
【0085】
【数19】
【0086】
式24で、α、β、γはベクトルABとベクトルACとの外積から求められる要素であり、式25ないし27のように求めることができる。
【0087】
【数20】
【0088】
運転者12の視直線Aを上述した眼球回転角度と眼球位置座標とを用いて表すと, 式28のように書くことができる。
【0089】
【数21】
【0090】
式24と式28との連立方程式により、kについての一次式(式29)を導出することができる。
【0091】
【数22】
【0092】
式29でkを求め式28に代入することにより、平面ABCと視直線Sとの交点P(Wx,Wy,Wz)を求めることができる。点Pが平面ABCの内部に存在するとき、式30のように書くことができる。
【0093】
【数23】
【0094】
式30の条件を満たす交点P(Wx,Wy,Wz)を注視点の3次元位置座標と定義することができる。
【0095】
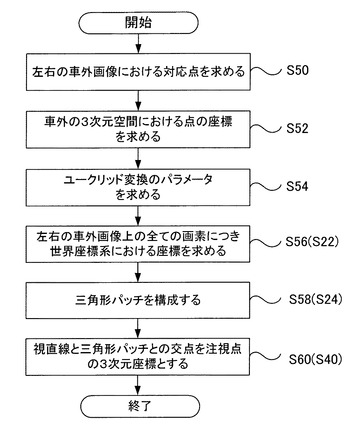
図10は、上述した本発明の3次元範囲計測プログラムを構成する二眼ステレオ法の処理の流れをフローチャートで示す。図10に示されるように、まず、車外画像DB70に記録された左右の車外画像に対して式6に示される条件(所定の条件)を満たす画素の集合としてエピポーラ線を求め、当該エピポーラ線上を探索することにより左右の車外画像における対応点を求める(ステップS50。対応点マッチングステップ)。対応点マッチングステップ(ステップS50)で対応点が求められた画素については当該画素に投影される車外の3次元空間における点の位置座標を求めると共に、対応点が求められなかった画素については当該画素の周辺画素から補間を行うことにより当業者該画素に投影される車外の3次元空間における点の座標を求める(ステップS52。3次元座標算出ステップ)。3次元座標算出ステップ(ステップS52)で求められた車外の3次元空間における点の座標をユークリッド変換して視線情報DB72に記録された世界座標系における所定の点の座標とする際の変換パラメータp1、...,p12を求める(変換パラメータ算出ステップ。ステップS54)。変換パラメータ算出ステップ(ステップS54)で求められた変換パラメータp1、...,p12を用いて、車外画像DB70に記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報DB74に記録する(ステップS56または図2に示されるステップS22。画素座標算出ステップ)。画素座標情報DB74に記録された隣り合う3つの画素毎に所定の方式で三角形パッチを構成し、当該三角形パッチに関する情報を三角形パッチ情報DB76に記録する(ステップS58または図2に示されるステップS24。三角形パッチ構成ステップ)。視線情報DB72に記録された世界座標系における所定の点を注視する際の運転者12の両眼球12L等の眼球回転角度および眼球位置座標と当該所定の点の座標とから得られる運転者12の視直線Sと、三角形パッチ情報DB76に記録された三角形パッチとの交点Pwを有する三角形パッチを所定の方法により求め、当該交点を運転者12の注視点の3次元座標とし、当該注視点の位置座標を時間の経過と共に注視点位置座標DB78に記録する(ステップS60または図2に示されるステップS40。交点算出ステップ)。
【0096】
以上のように、本発明の実施例1によれば、3次元範囲計測システム1は車両10の車外環境をステレオ計測する2台の広角レンズカメラを有する車外カメラ20(座標は車両10の進行方向がZc軸、Zc軸に垂直にXc軸およびYc軸)と、運転者12の視線方向を計測する車内カメラ30(座標は運転者方向がZw軸、Zw軸に垂直にXw軸およびYw軸)と、車外カメラ20および車内カメラ30に接続されたPC40とから構成されている。車外カメラ20の広角レンズカメラは魚眼レンズカメラであることが好適であるが、これに限定されるものではない。車内カメラ20は、車内に設置されたCCD等のイメージセンサを用いて運転者12の両眼球12L等の眼球回転角および眼球位置座標を取得する。
【0097】
車内カメラ30により運転者12の顔画像が撮像されて視線計測処理が行われ、運転者12の眼球位置座標および眼球回転角が求められる。並行して車外カメラ20により車外画像が撮像されて車外ステレオ処理が実行される。車内カメラ30の座標系と車外カメラ20の座標系とは異なるため、運転者12の視線方向の情報と車外の3次元環境の情報とを統合するためには、左右の各魚眼ステレオカメラ30L等の座標系を世界座標系に統一させる必要がある。本発明の3次元範囲計測プログラム等では、車内カメラ30の座標系XwYwZwを世界座標系とし車外カメラ20の座標系XcYcZcを車内カメラ30の座標系に合わせた。
【0098】
本発明で用いる二組の魚眼ステレオカメラ(車内用、車外用)には共通する撮影領域がないため、一般的な校正器具を用いたカメラ校正は不可能である。そこで、予め運転者12が車両10の座席に座った状態で所定の位置においたマーカーを注目してもらい、その時に車内カメラ30(faceLAB) から取得できる運転者12の視線方向の情報と上記マーカーの魚眼カメラ座標系における3次元座標とから、カメラ座標系を統合する校正用パラメータを求める手法を考案した。車外カメラ20の計測から得られた車外環境の画像上の隣接する3つの画素毎に三角形パッチを構成する。次に、車内カメラ30の計測から得られた運転者の視直線と三角形パッチとの交点を運転者12の注視点の3次元座標とする。種々の情報を記録装置42に記録した後、上述した処理を繰返す。
【0099】
本発明では、等距離射影式の魚眼レンズカメラによる、透視投影モデルに変換しない二眼ステレオ法を考案した。まず、車外画像DB70に記録された左右の車外画像に対して式6に示される条件を満たす画素の集合としてエピポーラ線を求め、当該エピポーラ線上を探索することにより左右の車外画像における対応点を求める。対応点が求められた画素については当該画素に投影される車外の3次元空間における点の位置座標を求めると共に、対応点が求められなかった画素については当該画素の周辺画素から補間を行うことにより当業者該画素に投影される車外の3次元空間における点の座標を求める。求められた車外の3次元空間における点の座標をユークリッド変換して視線情報DB72に記録された世界座標系における所定の点の座標とする際の変換パラメータp1、...,p12を求める。求められた変換パラメータp1、...,p12を用いて、車外画像DB70に記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報DB74に記録する。画素座標情報DB74に記録された隣り合う3つの画素毎に所定の方式で三角形パッチを構成し、当該三角形パッチに関する情報を三角形パッチ情報DB76に記録する。視線情報DB72に記録された世界座標系における所定の点を注視する際の運転者12の両眼球12L等の眼球回転角度および眼球位置座標と当該所定の点の座標とから得られる運転者12の視直線Sと、三角形パッチ情報DB76に記録された三角形パッチとの交点Pwを有する三角形パッチを所定の方法により求め、当該交点を運転者12の注視点の3次元座標とし、当該注視点の位置座標を時間の経過と共に注視点位置座標DB78に記録する。
【0100】
以上のようにして、車両10等の運転者12の3次元的な認知領域の広がりを計測することができる3次元範囲計測システム等を提供することができる。
【実施例2】
【0101】
実施例2では実施例1で得られた注視点位置座標DB78を用いて、運転者12の注視点からの3次元凸包を生成する方法について説明する。運転手12の眼球12L等を基点とした過去tフレーム間の視線方向ベクトル(注視点べクトル)で構成される3次元凸包を有効視空間と定義する。有効視空間の計測中にも車両は走行しているので、運転手の眼球位置(視線計測カメラ座標系)から伸びる視直線Sを基準とし、そこからの注視点の3次元位置の相対的な変化から有効視空間を構築する。注視点の位置ベクトル群から3次元凸包を構成し、この内部領域を有効視空間として求める。
【0102】
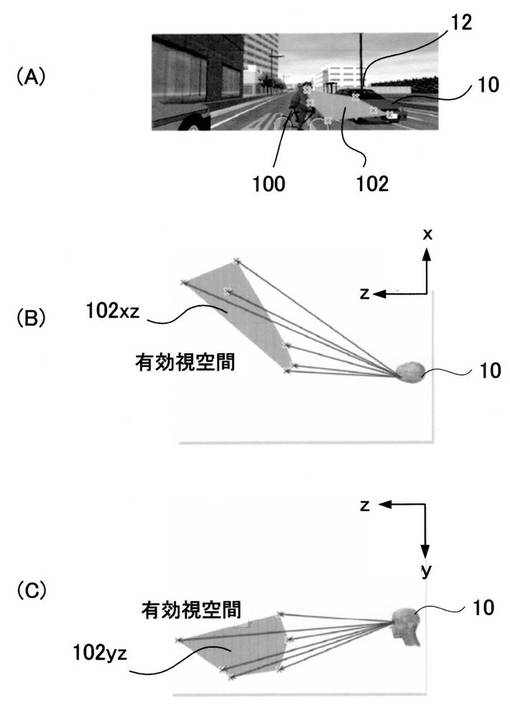
図11は、本発明の実施例2における有効視空間を説明するための図である。図11(A)で、符号100はハザード(車外における対象物であって特に運転者12が注意を向ける必要があるもの)、102は有効視空間である。図11(B)はxz平面(実施例1における車外カメラ20の座標系でのXcZc平面)に射影された場合の有効視区間102xzを示し、図11(C)はyz平面(実施例1における車外カメラ20の座標系でのYcZc平面)に射影された場合の有効視区間102yzを示す。図11(A)に示されるように、運転者12の有効視空間102内にハザード100が含まれているため、運転者12はハザード100を認知していることがわかる。
【0103】
図3に示される機能ブロック50の有効視空間算出部57(有効視空間算出手段)は、注視点位置座標DB78に記録された過去tフレーム間分(所定の時間分)の注視点座標から構成される3次元凸包を運転手の有効視空間として求める。即ち、時系列の注視点群から3次元凸包を生成することにより、その領域を有効視空間とする。以下、詳細に説明する。
【0104】
tフレーム分の注視点座標をX={x1,x2、・・・,xt}とするとき、これらから構成される3次元凸包を運転者12の有効視空間とする。具体的には注視点座標の集合において、
【0105】
【数24】
の条件を満たすすべての凸結合
【0106】
【数25】
【0107】
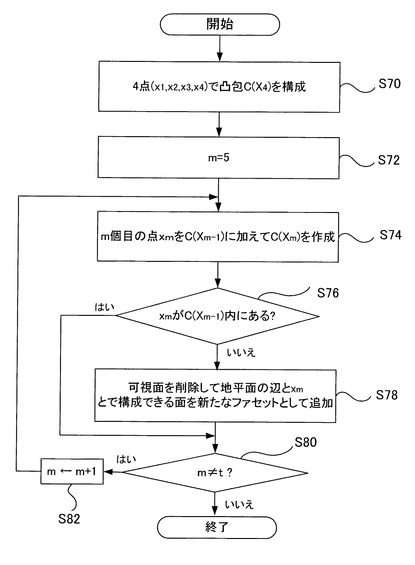
の共通部分(凸包)C を求める。凸包のデータ構造は、3次元凸多面体の境界を平面グラフと考え、二重連結リストで保持する。図12は、逐次添加法によって3次元凸包を求めるアルゴリズム(非特許文献7参照)をフローチャートで示す。図12に示されるように、x1,x2 ,x3,x4の4点で凸包(四面体)C(X4)を構成する(ステップS70)。m=5とする(ステップS72)。m個目の点xmをC(Xm−1) に加えてC(Xm)を作成する(ステップS74)。もしxm がC(Xm−1)の内部にある場合、xmは凸包C(Xm)の内部の点であるため、何もしないでステップS80へ進む(ステップS76)。そうでない場合、可視面を削除して地平面の辺とxmとで構成できる面を新たなファセットとして追加する(ステップS78)。ステップS80でm≠tでなければmを1加算してステップS74へ戻る(ステップS80、S82)。
【0108】
可視面の求め方:xi、xj、xkの順の有効連結リストのファセットにおいて、{(xi−xj)×(xj−xk)}・(xi−xm)>0ならそのファセットは可視面である。
地平面の求め方:削除した可視面と辺を共有するファセットがxmに対して不可視面であればその辺は地平面の辺である。
【0109】
図13は逐次追加の様子を例示する。図13(A)はm個目の点xmを凸包C(Xm−1) に加える状態を示し、図13(B)はm個目の点xmが凸包C(Xm−1) に加えられて凸包C(Xm)が生成された状態を示す。
【0110】
以上のように、本発明の実施例2によれば、運転手12の眼球12L等を基点とした過去tフレーム間の視線方向ベクトル(注視点べクトル)で構成される3次元凸包を有効視空間と定義する。運転者12の有効視空間102内にハザード100が含まれていれば、運転者12はハザード100を認知していることがわかる。有効視空間算出部57は、注視点位置座標DB78に記録された過去tフレーム間分(所定の時間分)の注視点座標から構成される3次元凸包を運転手の有効視空間として求める。即ち、時系列の注視点群から3次元凸包を生成することにより、その領域を有効視空間とする。3次元凸包は逐次添加法によって求めることができる。以上により、運転者12の心理状態等の心的要因によって変化する3次元的な有効視野(有効視空間)の時間的変化を測定することができる3次元範囲計測システム等を提供することができる。
【実施例3】
【0111】
実施例3では、実施例2で説明した有効視空間を運転者12に対して表示する例について説明する。図3に示される機能ブロック50の有効視空間表示部58(有効視空間表示手段)は、有効視空間算出部57により算出された有効視空間の路面上への正射影像を求め、コンピュータ40に接続された表示装置84(後述)に当該正射影像を所定の方式で表示する。
【0112】
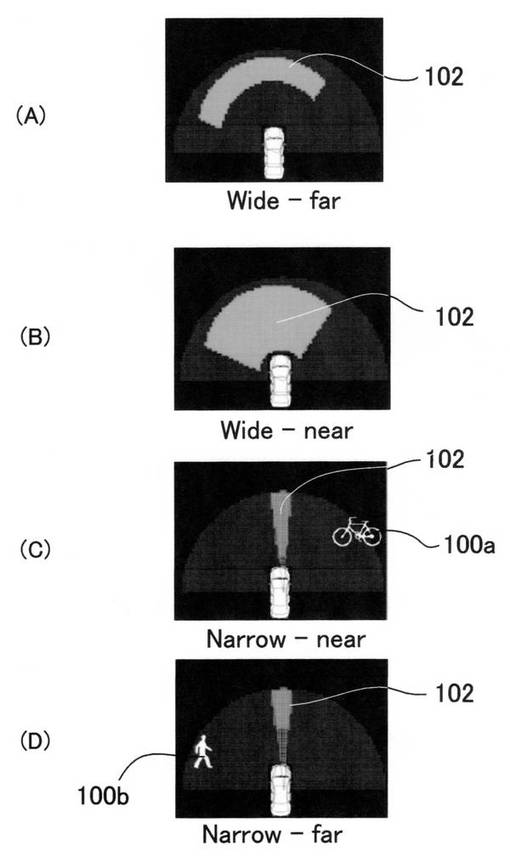
図14は、本発明の実施例3における有効視空間の表示例を示す。有効視空間102の広さを色で表し(原図)、十分広い有効視空間が保たれている場合は緑色で表示し(図14(A)の広く且つ遠方状態、図14(B)の広く且つ近い状態)、有効視空間が狭まっているときには赤色で警告をするように表示する(図14(C)の狭く且つ近い状態、図14(D)の狭く且つ遠方状態)。有効視空間外にハザード(歩行者など車両の進路方向にあって衝突可能性の有るもの)が存在する場合にはピクトグラム(図14(C)の自転車100a、図14(D)の歩行者100b)を表示して運転者12に注意を促す。但し、表示する有効視空間の最大奥行きは車外のステレオ計測精度に依存する。遠方まで正確な計測ができるカメラを使用する場合には表示できる有効視空間の大きさも広くなる。表示する有効視空間の左右の広がりも車外のステレオ計測性能に依存する。広視野領域を精度よく計測できる魚眼カメラの場合には表示できる左右の広がりも広くなる。
【0113】
以上のように、本発明の実施例3によれば、有効視空間算出部57により算出された有効視空間の路面上への正射影像を求め、コンピュータ40に接続された表示装置84(後述)に当該正射影像を所定の方式で表示する。この結果、水平視野角、垂直視野角、奥行きを映像で表示し、色による有効視空間の大きさ表現、見落としハザードの表示を行うことができる。
【実施例4】
【0114】
実施例4では、実施例2で説明した有効視空間を利用した種々の運転支援の仕組みについて説明する。図3に示される機能ブロック50のハザード座標検出部59(ハザード検出手段)は、車両10の運転者12から見える3次元空間の範囲内に存在するハザードの座標を検出し、警告部59(警告手段)はハザード座標検出部59により検出されたハザードの座標と注視点位置座標DB78に記録された所定の時間分の注視点座標とに基づき、所定の警告を発する。
【0115】
ハザード座標検出部59は、車外画像DB70に記録された車外画像から所定の動物体解析手法により車両10の外のハザードを検出して車外カメラ20の座標系で特定し、その後当該座標を上述した方法と同様にして車内カメラ30の座標系へ合わせる。所定の動物体解析手法としては既存技術であるオプティカルフローアルゴリズムによる解析手法が好適である。発明者らはHalcon(登録商標) machine vision library function(optical_flow_mg())を使用した。詳細は、Halcon(登録商標) reference manual(http://www/mvtec.com/download/documentation/reference-9.0/hdevelop/optical_flow_mg.html)を参照されたい。
【0116】
ハザード座標検出部59により検出されたハザードの座標と注視点位置座標DB78に記録された所定の時間分の注視点座標とを用いることにより、運転者12がハザードを見ていたのか否かを特定することができる。言い換えれば、運転者12があるハザードを見落としていたことも特定できる。ハザードの3次元座標は上述したように得ることができるため、高価なレーザ装置を用いなくても車両10とハザードとの間の距離を測定することもできる。従って当該距離と車両10の走行速度とからハザードに衝突するまでの時間も得ることができる。このため、より正確な警告(音声または画像表示)を発することができる。加えて、運転者12の視線計測ができるため、運転者12が計器類、同乗者等に気を取られて前方を見ないというディストラクション(distraction)を検知することも可能である。
【0117】
以上のように、本発明の実施例4によれば、ハザード座標検出部59により検出されたハザードの座標と注視点位置座標DB78に記録された所定の時間分の注視点座標とを用いることにより、種々の正確な警告を発することができる。このため、本発明の3次元範囲計測システムを車両10に搭載することにより、より安全性が高く且つ安価な車両10を提供することが可能となる。
【実施例5】
【0118】
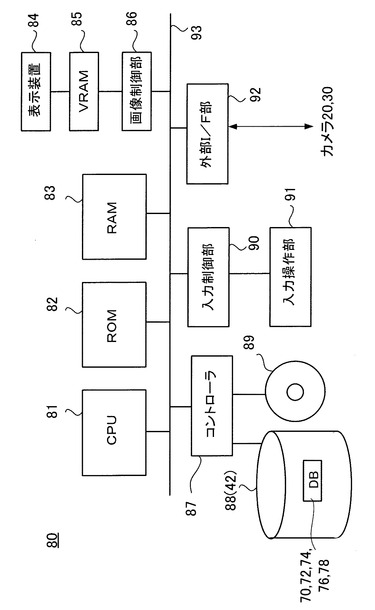
図15は、本発明の3次元範囲計測プログラムを実行するPC(コンピュータ)40の内部回路80を示すブロック図である。図15に示されるように、CPU81、ROM82、RAM83、画像制御部86、コントローラ87、入力制御部90および外部I/F部92はバス93に接続されている。図15において、上述した本発明の3次元範囲計測プログラムは、ROM82、ディスク88(又は44)、DVD若しくはCD−ROM89等の記録媒体(脱着可能な記録媒体を含む)に記録されている。ディスク88(又は44)には、上述した種々の車外画像DB70、視線情報DB72、画素座標情報DB74、三角形パッチ情報DB76、注視点位置座標DB78等を記録しておくことができる。3次元範囲計測プログラムは、ROM82からバス93を介し、あるいはディスク88又はDVD若しくはCD−ROM89等の記録媒体からコントローラ87を経由してバス93を介しRAM83へロードされる。画像制御部86は、有効視空間表示部58または警告部60等により表示される種々の画面の画像データをVRAM85へ送出する。表示装置(ディスプレイ)84はVRAM85から送出された上記データ等を表示する。VRAM85は表示装置84の一画面分のデータ容量に相当する容量を有している画像メモリである。入力操作部91はPC40に入力等を行うためのマウス、キーボード等の入力装置であり、入力制御部90は入力操作部91と接続され入力制御等を行う。外部I/F部92はPC40の外部にある車外カメラ20および車内カメラ30と接続する際のインタフェース機能を有している。
【0119】
上述したようにコンピュータ(CPU)81が本発明の3次元範囲計測プログラムを実行することにより、本発明の目的を達成することができる。3次元範囲計測プログラムは上述のようにDVD若しくはCD−ROM89等の記録媒体の形態でコンピュータ(CPU)81に供給することができ、3次元範囲計測プログラムを記録したDVD若しくはCD−ROM89等の記録媒体も同様に本発明を構成することになる。3次元範囲計測プログラムを記録した記録媒体としては上述された記録媒体の他に、例えばメモリ・カード、メモリ・スティック、光ディスク等を用いることができる。
【0120】
上述した各実施例の説明では、図2の事前のカメラ校正(ステップS1)については触れなかった。本発明においても、既存の手法を用いて事前のカメラ校正を行っており、カメラの内部パラメータ(これは焦点距離、レンズ歪み、画素サイズなどから成る)を事前に得ている。この校正が事前に行えているという前提で、上述した式1からは、カメラの内部パラメータで正規化した(レンズの歪などの影響を取り除いた)ul、vl等を利用している。式1、2の焦点距離fも事前のカメラ校正で求めた数値を利用している。
【産業上の利用可能性】
【0121】
本発明の活用例として、事故防止ツールに適用することができる。わが国の交通事故を法令違反別に見ると、安全不確認が約3割と最も多いと言われている。事故と視覚認知特性との関連では、特に中高年の有効視野と事故率との相関が高いことも報告されている。このため、本発明の3次元範囲計測システム1等(特に有効視空間表示部58の機能)を利用して、交通状況に応じた自身の有効視空間を常時把握することにより、過大評価することなく、安全運転スタイルを心がけるようにすることができる。
【符号の説明】
【0122】
1 3次元範囲計測システム、 10 車両、 12 運転者、 12L、12R 眼球、 20、25L、25R 車外カメラ、 30、30L、30R 車内カメラ、 40 PC、 42 記録装置、 50 機能ブロック、 51 対応点マッチング部、 52 3次元座標算出部、 53 変換パラメータ算出部、 54 画素座標算出部、 55 三角形パッチ構成部、 56 交点算出部、 57 有効視空間算出部、 58 有効視空間表示部、 59 ハザード座標検出部、 60 警告部、 70 車外画像DB、 72 視線情報DB、 74 画素座標情報DB、 76 三角形パッチ情報DB、 78 注視点位置座標DB、81 CPU、 82 ROM、 83 RAM、 84 表示装置、 85 VRAM、 86 画像制御部、 87 コントローラ、 88 ディスク、 89 CD−ROM、 80 入力制御部、 91 入力操作部、 92 外部I/F部、 93 バス 100 ハザード、 102 有効視空間。
【先行技術文献】
【非特許文献】
【0123】
【非特許文献1】那倉達哉、入倉隆著、「疲労と有効視の関係」, 照明学会誌, 第89 巻, 第11号,2005.
【非特許文献2】McConkie George W. and RaynerKeith: “The span of the effective stimulus during a fixationsin reading”, Perceptionand Psychophisics,17, pp.578-586,1975.
【非特許文献3】三浦利章著、「行動場面における視覚的認知」, 日本心理学会第48回大会発表論文集, S68−69,1984.
【非特許文献4】立花康夫, 河合敏勝, 小林洋介, 栗原哲也, 菊池孝之著、「魚眼レンズ写真から任意焦点レンズ画像への変換」, 電子情報通信学会技術研究報告. SIP, 信号処理: IEICE technical report107,No.22, pp.25-30, 2007.
【非特許文献5】加瀬翔太, 奥津良太, 光本尚訓, 新垣洋平, 下村倫子, 寺林賢司, 梅田和昇著、「複数の魚眼カメラの内部・外部パラメータの同定による俯瞰画像生成」, 電気学会研究会資料. IP, 情報処理研究会2008, No.13, pp.43−48, 2008.
【非特許文献6】永森千貴, 西本武志, 山口順一著、「魚眼ステレオ視覚センサ」, 第12 回画像センシングシンポジウム予稿集, pp.137−140, 2006.
【非特許文献7】K.L. Clarkson and P.W. Shor: “Applications of random sampling incomputational geometry,II”, Discrete Computer Geometry, No.4, pp.387−421,1989.
【技術分野】
【0001】
本発明は、車両の運転者から見える3次元空間の範囲を計測する3次元範囲計測システム等に関する。
【背景技術】
【0002】
一般に、人の視野とは目を動かさずに見える範囲とされている。目を向けている点(注視点)方向の角度を0°とすると、注視点から左右13°(視角26°。中心視)の範囲では視力は約1.2と良好であるが、視野の周辺部の範囲(周辺視野)では視力は約0.1と急に低くなっている。周辺視野で物体を認知することができる範囲を有効視野と呼ぶ。言い換えれば、有効視野とは周辺視野の内、認知に寄与する部分のことを言う。有効視野は年齢、性別等により異なると言われている。自動車等の運転者のように、動いている状態で車外を見る場合、有効視野が重要となる。この場合、有効視野は年齢、性別等に加えて、走行状況、道路状況、心理状態、個人差により異なると言われている。
【0003】
一般に人の有効視野を計測するためには、被験者にスクリーン中の固視点を注視してもらいながら、視野内のスクリーンに映る様々な視覚刺激の中からターゲット刺激を検出することにより測定される(非特許文献1参照)。自由な眼球運動下での有効視野計測として制限視野法(非特許文献2参照)があり、その自動車運転時の計測への応用(非特許文献3参照)も提案されている。例えば、Seeing Machines(登録商標)社製のfaceLAB等の車内ステレオカメラ装置を用いて自動車の運転者の眼球回転角度(縦方向回転のピッチ角成分および横方向回転のヨー角成分)の測定が行われていた。
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した非特許文献1および2に記載された有効視野を測定する方法では、スクリーンといった平面内または円筒上での注視方向のみを対象としていた。このため、その奥行きを一切考慮していなかった。運転者が注視する対象物と自動車との間の距離は様々に変化し一定ではないため、遠近を含む距離を測定する必要がある。しかし、上述した車内ステレオカメラ装置を用いた方法では運転者の視線方向(直線)を2次元的にしか測定できず、奥行きを含めた3次元的な認知領域の広がりを計測することができないという問題があった。
【0005】
そこで、本発明の目的は上記問題を解決するためになされたものであり、自動車等の運転者の3次元的な認知領域の広がりを計測することができる3次元範囲計測システム等を提供することにある。
【0006】
本発明の第2の目的は、心理状態等の心的要因によって変化する3次元的な有効視野の時間的変化を測定することができる3次元範囲計測システム等を提供することにある。
【0007】
本発明の第3の目的は、車外の物体(ハザード)を運転者が注視したのか否かを特定することができると共に所定の警告を発することができ、有効視野を表示する等の運転支援を行うことができる3次元範囲計測システム等を提供することにある。
【課題を解決するための手段】
【0008】
この発明の3次元範囲計測システムは、車両の運転者から見える3次元空間の範囲を計測する3次元範囲計測システムであって、車外環境をステレオ計測する2台の広角レンズカメラを有する車外撮像器と、運転者の視線方向を計測する車内撮像器と、該車外撮像器及び該車内撮像器に接続されたコンピュータとを備え、コンピュータが、前記車内撮像器の座標系を世界座標系とし前記車外撮像器の座標系を該車内撮像器の座標系に合わせ、該車内撮像器の計測から得られた運転者の視直線と該車外撮像器の計測から得られた車外環境の画像上の隣接する3つの画素毎に設定された三角形パッチとの交点を運転者の注視点の3次元座標とすることにより、運転者から見える3次元空間の範囲を測定することを特徴とする。
【0009】
ここで、この発明の3次元範囲計測システムにおいて、前記車外撮像器は車外に設置された等距離射影方式の左右の魚眼レンズカメラを広角レンズカメラとして用い、前記車内撮像器は車内に設置されたイメージセンサを用いて運転者の両眼球の回転角度及び位置座標を取得することができる。
【0010】
ここで、この発明の3次元範囲計測システムにおいて、前記コンピュータは、前記車外撮像器を用いて撮像された左右の魚眼レンズカメラによる左右の車外画像を記録した車外画像記録部と、前記車内撮像器を用いて取得された、世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とを対応させて記録した視線情報記録部と、前記車外画像記録部に記録された左右の車外画像に対して所定の条件を満たす画素の集合としてエピポーラ線を求め、該エピポーラ線上を探索することにより左右の車外画像における対応点を求める対応点マッチング手段と、前記対応点マッチング手段により対応点が求められた画素については該画素に投影される車外の3次元空間における点の位置座標を求めると共に、対応点が求められなかった画素については該画素の周辺画素から補間を行うことにより該画素に投影される車外の3次元空間における点の座標を求める3次元座標算出手段と、前記3次元座標算出手段により求められた車外の3次元空間における点の座標をユークリッド変換して前記視線情報記録部に記録された世界座標系における所定の点の座標とする際の変換パラメータを求める変換パラメータ算出手段と、前記変換パラメータ算出手段により求められた変換パラメータを用いて、前記車外画像記録部に記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報記録部に記録する画素座標算出手段と、前記画素座標情報記録部に記録された隣り合う3つの画素毎に所定の方式で三角形パッチを構成し、該三角形パッチに関する情報を三角形パッチ情報記録部に記録する三角形パッチ構成手段と、前記視線情報記録部に記録された世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とから得られる運転者の視直線と、前記三角形パッチ情報記録部に記録された三角形パッチとの交点を有する三角形パッチを所定の方法により求め、該交点を運転者の注視点の3次元座標とし、該注視点の位置座標を時間の経過と共に注視点位置座標記録部に記録する交点算出手段とを備えることができる。
【0011】
ここで、この発明の3次元範囲計測システムにおいて、前記注視点位置座標記録部に記録された所定の時間分の注視点座標から構成される3次元凸包を運転手の有効視空間として求める有効視空間算出手段をさらに備えることができる。
【0012】
ここで、この発明の3次元範囲計測システムにおいて、前記有効視空間算出手段により算出された有効視空間の路面上への正射影像を求め、前記コンピュータに接続された表示装置に該正射影像を所定の方式で表示する有効視空間表示手段をさらに備えることができる。
【0013】
ここで、この発明の3次元範囲計測システムにおいて、車両の運転者から見える3次元空間の範囲内に存在するハザードの座標を検出するハザード座標検出手段と、前記ハザード座標検出手段により検出されたハザードの座標と前記注視点位置座標記録部に記録された所定の時間分の注視点座標とに基づき、所定の警告を発する警告手段とをさらに備えることができる。
【0014】
この発明の3次元範囲計測プログラムは、車両の運転者から見える3次元空間の範囲を計測する3次元範囲計測プログラムであって、車外環境をステレオ計測する2台の広角レンズカメラを有する車外撮像器と、運転者の視線方向を計測する車内撮像器と、該車外撮像器及び該車内撮像器に接続されたコンピュータとを用いるものであり、コンピュータに、前記車内撮像器の座標系を世界座標系とし前記車外撮像器の座標系を該車内撮像器の座標系に合わせ、該車内撮像器の計測から得られた運転者の視直線と該車外撮像器の計測から得られた車外環境の画像上の隣接する3つの画素毎に設定された三角形パッチとの交点を運転者の注視点の3次元座標とすることにより、運転者から見える3次元空間の範囲の測定を実行させるための3次元範囲計測プログラムである。
【0015】
ここで、この発明の3次元範囲計測プログラムにおいて、前記車外撮像器は車外に設置された等距離射影方式の左右の魚眼レンズカメラを広角レンズカメラとして用い、前記車内撮像器は車内に設置されたイメージセンサを用いて運転者の両眼球の回転角度及び位置座標を取得することができる。
【0016】
ここで、この発明の3次元範囲計測プログラムにおいて、前記コンピュータは、前記車外撮像器を用いて撮像された左右の魚眼レンズカメラによる左右の車外画像を記録した車外画像記録部と、前記車内撮像器を用いて取得された、世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とを対応させて記録した視線情報記録部とをさらに用い、コンピュータに、前記車外画像記録部に記録された左右の車外画像に対して所定の条件を満たす画素の集合としてエピポーラ線を求め、該エピポーラ線上を探索することにより左右の車外画像における対応点を求める対応点マッチングステップ、前記対応点マッチングステップで対応点が求められた画素については該画素に投影される車外の3次元空間における点の位置座標を求めると共に、対応点が求められなかった画素については該画素の周辺画素から補間を行うことにより該画素に投影される車外の3次元空間における点の座標を求める3次元座標算出ステップ、前記3次元座標算出ステップで求められた車外の3次元空間における点の座標をユークリッド変換して前記視線情報記録部に記録された世界座標系における所定の点の座標とする際の変換パラメータを求める変換パラメータ算出ステップ、前記変換パラメータ算出ステップで求められた変換パラメータを用いて、前記車外画像記録部に記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報記録部に記録する画素座標算出ステップ、前記画素座標情報記録部に記録された隣り合う3つの画素毎に所定の方式で三角形パッチを構成し、該三角形パッチに関する情報を三角形パッチ情報記録部に記録する三角形パッチ構成ステップ、前記視線情報記録部に記録された世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とから得られる運転者の視直線と、前記三角形パッチ情報記録部に記録された三角形パッチとの交点を有する三角形パッチを所定の方法により求め、該交点を運転者の注視点の3次元座標とし、該注視点の位置座標を時間の経過と共に注視点位置座標記録部に記録する交点算出ステップを実行させることができる。
【0017】
ここで、この発明の3次元範囲計測プログラムにおいて、前記注視点位置座標記録部に記録された所定の時間分の注視点座標から構成される3次元凸包を運転手の有効視空間として求める有効視空間算出ステップをさらに備えることができる。
【0018】
ここで、この発明の3次元範囲計測プログラムにおいて、前記有効視空間算出ステップにより算出された有効視空間の路面上への正射影像を求め、前記コンピュータに接続された表示装置に該正射影像を所定の方式で表示する有効視空間表示ステップをさらに備えることができる。
【0019】
ここで、この発明の3次元範囲計測プログラムにおいて、車両の運転者から見える3次元空間の範囲内に存在するハザードの座標を検出するハザード座標検出ステップと、前記ハザード座標検出ステップにより検出されたハザードの座標と前記注視点位置座標記録部に記録された所定の時間分の注視点座標とに基づき、所定の警告を発する警告ステップとをさらに備えることができる。
【0020】
この発明の記録媒体は、本発明のいずれかの3次元範囲計測プログラムを記録したコンピュータ読取り可能な記録媒体である。
【発明の効果】
【0021】
本発明の3次元範囲計測システム等によれば、車内カメラにより運転者の顔画像が撮像されて視線計測処理が行われ、運転者の眼球位置座標および眼球回転角が求められる。並行して車外カメラにより車外画像が撮像されて車外ステレオ処理が実行される。車内カメラの座標系と車外カメラの座標系とは異なるため、車内カメラの座標系XwYwZwを世界座標系とし車外カメラの座標系XcYcZcを車内カメラ30の座標系に合わせた。本発明で用いる二組の魚眼ステレオカメラ(車内用、車外用)には共通する撮影領域がないため、予め運転者が車両の座席に座った状態で所定の位置においたマーカーを注目してもらい、その時に車内カメラから取得できる運転者の視線方向の情報と上記マーカーの魚眼カメラ座標系における3次元座標とから、カメラ座標系を統合する校正用パラメータを求める手法を考案した。車外カメラの計測から得られた車外環境の画像上の隣接する3つの画素毎に三角形パッチを構成する。次に、車内カメラの計測から得られた運転者の視直線と三角形パッチとの交点を運転者の注視点の3次元座標とする。本発明では、等距離射影式の魚眼レンズカメラによる、透視投影モデルに変換しない二眼ステレオ法を考案した。車外画像DBに記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報DBに記録する。画素座標情報DBに記録された隣り合う3つの画素毎に所定の方式で三角形パッチを構成し、当該三角形パッチに関する情報を三角形パッチ情報DBに記録する。視線情報DBに記録された世界座標系における所定の点を注視する際の運転者の両眼球の眼球回転角度および眼球位置座標と当該所定の点の座標とから得られる運転者の視直線と、三角形パッチ情報DBに記録された三角形パッチとの交点を有する三角形パッチを所定の方法により求め、当該交点を運転者の注視点の3次元座標とした。以上のようにして、本発明の3次元範囲計測システム等によれば、車両の運転者の3次元的な認知領域の広がりを計測することができる3次元範囲計測システム等を提供することができるという効果がある。
【0022】
本発明の3次元範囲計測システム等によれば、時系列の注視点群から3次元凸包を生成することにより、その領域を有効視空間とする。3次元凸包は逐次添加法によって求めることができる。この結果、運転者12の心理状態等の心的要因によって変化する3次元的な有効視野(有効視空間)の時間的変化を測定することができる3次元範囲計測システム等を提供することができるという効果がある。
【0023】
本発明の3次元範囲計測システム等によれば、有効視空間算出部により算出された有効視空間の路面上への正射影像を求め、コンピュータに接続された表示装置に当該正射影像を所定の方式で表示する。この結果、水平視野角、垂直視野角、奥行きを映像で表示し、色による有効視空間の大きさ表現、見落としハザードの表示を行うことができるという効果がある。
【0024】
本発明の3次元範囲計測システム等によれば、ハザード座標検出部により検出されたハザードの座標と注視点位置座標DBに記録された所定の時間分の注視点座標とを用いることにより、種々の正確な警告を発することができる。このため、本発明の3次元範囲計測システムを車両に搭載することにより、より安全性が高く且つ安価な車両を提供することが可能となる。
【図面の簡単な説明】
【0025】
【図1】本発明の実施例1および他の実施例における3次元範囲計測システム1の概要を示す図である。
【図2】本発明の3次元範囲計測プログラムの処理の流れを示すフローチャートである。
【図3】本発明の3次元範囲計測プログラムの動作環境を示す図である。
【図4】本発明の3次元範囲計測プログラムを構成する二眼ステレオ法で用いる魚眼ステレオの投影モデルを示す図である。
【図5】魚眼レンズカメラ25Lおよび25Rを車両10の屋根に設置した一例を示す図である。
【図6】車内カメラ器30の設置例を示す図である。
【図7】車内カメラ30と車外カメラ20との位置関係を示す図である。
【図8】視線計測カメラ30により運転者12の視線方向を計測する状況を示す図である。
【図9】運転者12の視直線Sと車外三角形パッチとの交点の導出を説明するための図である。
【図10】本発明の3次元範囲計測プログラムを構成する二眼ステレオ法の処理の流れを示すフローチャートである。
【図11】本発明の実施例2における有効視空間を説明するための図である。
【図12】逐次添加法によって3次元凸包を求めるアルゴリズム(非特許文献7参照)を示すフローチャートである。
【図13】逐次追加の様子を例示する図である。
【図14】本発明の実施例3における有効視空間の表示例を示す図である。
【図15】本発明のプログラムを実行するコンピュータ10の内部回路180を示すブロック図である。
【発明を実施するための最良の形態】
【0026】
以下、実施例について図面を参照して詳細に説明する。
【実施例1】
【0027】
図1は、本発明の実施例1および他の実施例における3次元範囲計測システム1の概要を示す。図1において、符号10は自動車等の車両、12は車両10を運転する運転者、20は車両10の車外環境をステレオ計測する2台の広角レンズカメラを有する車外カメラ(車外撮像器。座標は車両10の進行方向がZc軸、Zc軸に垂直にXc軸およびYc軸)、30は運転者12の視線方向を計測する車内カメラ(車内撮像器。座標は運転者方向がZw軸、Zw軸に垂直にXw軸およびYw軸)、40は車外カメラ20および車内カメラ30に接続されたパーソナルコンピュータ(PC)等のコンピュータである。3次元範囲計測システム1は車両10の運転者12から見える3次元空間の範囲を計測する。
【0028】
図1に示されるように車両10の屋根の上に設置された車外カメラ20の広角レンズカメラは魚眼レンズカメラであることが好適である。以下では車外カメラ20のカメラは魚眼レンズカメラであるものとして説明していくが、魚眼レンズカメラに限定されるものではなく、車外の対象物と車両10との間の距離が遠い(30m以上の)場合は、むしろ広角レンズカメラの方がよい場合もある。図1に示される車内カメラ20は、車内に設置されたCCD等のイメージセンサを用いて運転者12の両眼球(不図示)の回転角および位置座標を取得する。
【0029】
図2は、本発明の3次元範囲計測プログラムの処理の流れをフローチャートで示す。図2で図1と同じ符号を付した個所は同じ要素を示すため、説明は省略する。図2において、符号42はPC40と接続され3次元範囲計測プログラムが使用する種々のデータが記録された記録装置である。図3は、本発明の3次元範囲計測プログラムの動作環境を示す。図3において、符号50はPC40上で実行される3次元範囲計測プログラムの機能を示す機能ブロック、42は図2で説明した記録装置である。機能ブロック50内の諸機能はソフトウェアにより実現されているが、一部はハードウェアにより実現してもよい。以下、図1ないし図3の内容を適宜引用しながら本発明の3次元範囲計測プログラムの動作を説明していく。
【0030】
まず、本発明の3次元範囲計測プログラムの概要について説明する。図2に示されるように、車内カメラ30により運転者12の顔画像が撮像されて視線計測処理が行われ、運転者12の眼球位置座標および眼球回転角が求められる(ステップS30)。並行して車外カメラ20により車外画像が撮像されて車外ステレオ処理が実行される(ステップS20)。ここで、図1に示されるように車内カメラ30は座標系XwYwZwを有しており、一方車外カメラ20は別の座標系XcYcZcを有している。そこで、運転者12の視線方向の情報と車外の3次元環境の情報とを統合するためには、左右の各魚眼ステレオカメラの座標系を世界座標系に統一させる必要がある。本発明の3次元範囲計測プログラム等では、車内カメラ30の座標系XwYwZwを世界座標系とし車外カメラ20の座標系XcYcZcを車内カメラ30の座標系に合わせた(ステップS22)。
【0031】
本発明で用いる二組の魚眼ステレオカメラ(車内用、車外用)には共通する撮影領域がないため、一般的な校正器具を用いたカメラ校正は不可能である。そこで、予め運転者12が車両10の座席に座った状態で所定の位置においたマーカーを注目してもらい、その時に車内カメラ30(faceLAB) から取得できる運転者12の視線方向の情報と上記マーカーの魚眼カメラ座標系における3次元座標とから、カメラ座標系を統合する校正用パラメータを求める手法を考案した。詳細は後述する。図2に示されるように、車外カメラ20の計測から得られた車外環境の画像上の隣接する3つの画素毎に三角形パッチを構成する(ステップS24)。次に、車内カメラ30の計測から得られた運転者の視直線と三角形パッチとの交点を運転者12の注視点の3次元座標とする(ステップS40)。3次元的な有効視野の時間的変化を示す3次元凸包(詳細は後述)を計算し(ステップS42)、有効視空間(詳細は後述)情報を記録装置42に記録(ステップS44)した後、上述した処理を繰返す。
【0032】
次に、本発明の3次元範囲計測プログラムの詳細について説明する。上述した車外ステレオ処理(ステップS20)は車外環境の魚眼ステレオカメラによる計測である。魚眼ステレオカメラで撮影された画像を透視投影モデルの画像に変換する研究はいくつかなされており(非特許文献4、5参照)、魚眼モデルの画像を透視投影モデルの画像に変換することでステレオ計測を行っている(非特許文献6)。しかし、非特許文献4〜6に記載された方法では画像を変換することで魚眼モデルの画像の周辺部が欠落してしまうといった問題があった。そこで、等距離射影式の魚眼レンズカメラによる、透視投影モデルに変換しない二眼ステレオ法(主としてステップ22からS40に対応)を考案した。
【0033】
図4は、本発明の3次元範囲計測プログラムを構成する二眼ステレオ法で用いる魚眼ステレオの投影モデルを示す。以下では、「魚眼レンズ」は「魚眼レンズカメラ」を含む意味で用いる。図4に示されるように、車外カメラ20の左側魚眼レンズ25L(中心O、座標XYZ)と右側魚眼レンズ25R(中心O’、座標X’Y’Z‘)とについて、図4(A)は俯瞰図、図4(B)は魚眼レンズ25Lおよび26Rを上から見た平面図、図4(C)は魚眼レンズ25Lおよび26Rを下(カメラの中)から見た平面図である。図4(D)は図4(C)の説明用の図である。図4(A)、(B)において、3次元空間中の任意の点をPw とし、各魚眼レンズ25Lおよび25Rにその点を投影した点をそれぞれP、P’とする。θ とθ’とは各々左右の魚眼レンズ25Lおよび25Rに対する天頂角を示し、φとφ’とは方位角を示す。fとf’と各々左右の魚眼レンズ25Lおよび25Rのは焦点距離であり、球面モデルの半径を表す。図4(C)左側図で右方向が正方向のul軸は左画像の光軸を原点とする横方向の画像座標軸であり、下方向が正方向のvl軸は左画像の光軸を原点とする縦方向の画像座標軸である。同様に、図4(C)右側図で右方向が正方向のur軸は右画像の光軸を原点とする横方向の画像座標軸であり、下方向が正方向のvr軸は右画像の光軸を原点とする縦方向の画像座標軸である。
【0034】
図4(C)でvl軸が画像の下向きになっているのは、本発明の3次元範囲計測プログラム中で画像のデータが収まっている配列に起因する。一般的に画像はラスター操作の順に配列に収まっており、左上角から水平方向に右へ1行いったら、1マス下の一番左から水平方向に右へ1行き、さらに1マス下の一番左から水平方向に右へ1行というように、データを保持する。そのため、ul軸は右向き、vl軸は下向きにされることが多い。さらに、座標の原点を画像の左上角ではなく、画像の中心に持つと魚眼レンズの3次元座標(上記のXYZ等)のXYと画像のulvlが同じz軸上に原点があることになり、計算がしやすくなるため、その分だけ原点をシフトしている。
【0035】
上述したように、図4(B)のY軸と図4(C)のvl軸とは軸の向きが異なっている。このため、その方位角φの場所もXY平面とulvl平面とでは変わってくる。方位角φは右手座標系における横軸(ul軸、X軸)からの正の回転角を表している。XY平面であれば図4(B)に示されるようにX軸の正の位置からY軸の正の位置へ向かってとった角度になる。ulvl平面においても図4(C)に示されるようにul軸の正の位置からvl軸の正の位置へ向かってとった角度になる。ulvl平面においてもφはul軸との正の回転角度を意味するため、本来は図4(C)に示されるφは曲線の引き方が180度分だけ足らない。正規の方位角では図4(D)に示されるように、左図のφlは320度位、右図のφrは210度位になる。しかし、φは後述するようにarctan(vl/ul)によって求めている。arctanの周期はπ(=180度)であるため、φlの第3象限から第4象限までの角度をαとすると、tanφl=tan(π+α)=tanαとなる。このため、第3象限および第4象限の場合はul軸の負の部分からの正の回転角度だけとしても計算結果は180度多い方位角と同じ値になる。このため、図4(C)中のφの場所は180度分だけ短く書かれている。図4(C)の右図も同様であるため、説明は省略する。
【0036】
以上の準備に基づき、天頂角と方位角は式1のように得られる。
【0037】
【数1】
【0038】
左右の魚眼レンズカメラ25Lおよび25Rによる投影点PおよびP’の位置ベクトルをp、p’としたとき、それぞれを天頂角θ、θ’と方位角φ、φ’とを用いて表すと式2のようになる。
【0039】
【数2】
【0040】
3次元空間中の点Pwは左右の投影点の位置ベクトルを定数倍した所にあり、その位置ベクトルをPwは式3のように表すことができる。
【0041】
【数3】
【0042】
但し、klとkrとは任意の正の実数とする。また本発明では左右の魚眼レンズカメラ25Lおよび25Rの向きおよび高さを平行と仮定するため、両カメラ間距離をX軸方向にtxだけ離れているものとし、次の条件(式4)を与える。
【0043】
【数4】
【0044】
従って、3次元空間中の点Pwは式5のようにして求まる。
【0045】
【数5】
【0046】
魚眼投影画像でステレオマッチングするにあたり、問題となってくるのが対応点マッチングを行なう際のエピポーラ線である。図4(A)で中心O−点Pw−中心O’を結ぶ平面がエピポーラ平面であり、エピポーラ平面と魚眼レンズ25L、25Rとの交点P、P’がエピポールとなり、魚眼レンズ25L、25R上で各エピポールP、P’を結んだ曲線がエピポーラ線となる。つまり、魚眼画像のエピポーラ線は非直線であると共にその方程式は画素毎に異なる。エピポーラ線は次の条件式を満たす画素の集合として求める。
【0047】
【数6】
【0048】
このエピポーラ線上を探索して対応点マッチングを行う。図3に戻り、符号70は車外カメラ20を用いて撮像された左右の魚眼レンズカメラ25Lおよび25Rによる左右の車外画像を記録した車外画像データべースDB(車外画像記録部)である。図3の機能ブロック50に示される対応点マッチング部51(対応点マッチング手段)は、車外画像DB70に記録された左右の車外画像に対して式6(所定の条件)を満たす画素の集合としてエピポーラ線を求め、当該エピポーラ線上を探索することにより左右の車外画像における対応点を求める。
【0049】
以上の処理によって左右の魚眼画像で対応点が得られた画素(ul、vl) についてそこに投影される点の3次元座標Pwを式5を用いて求めることができる。エッジやテクスチャのあるところはこのようにして3次元座標を得られる。しかし、対応点が得られない画素(例えば道路など他の画素と区別がつかない画素)については、その周辺の画素から補間をして、画像上の全ての画素について投影される点の3次元座標を計算する。図3の機能ブロック50に示される3次元座標算出部52(3次元座標算出手段)は、対応点マッチング部51により対応点が求められた画素については当該画素に投影される車外の3次元空間における点の位置座標を求めると共に、対応点が求められなかった画素については当該画素の周辺画素から補間を行うことにより当該画素に投影される車外の3次元空間における点の座標を求める。
【0050】
図5は、魚眼レンズカメラ25Lおよび25Rを車両10の屋根に設置した一例を示す。図5に示されるように、車外カメラ20は車両10の屋根の上に2台の魚眼レンズカメラを左右に分けて設置することが好適である。しかし、上記設置位置は屋根の上に限定されるものではなく、ボンネットの上または両サイドミラーの上等であってもよく、特に設置位置が特定されるものではない。なお、本明細書では魚眼レンズとしてFUJIFILM(登録商標)社製のFE185C057HA−1を使用したが、この魚眼レンズに限定されるものではない。
【0051】
図6は、車内カメラ30の設置例を示す。車内カメラ20の設置位置は例えばダッシュボードの上に設置することが好適であるが、運転の邪魔にならない所であれば他の位置であってもよい。車内カメラ20はコンピュータ40にUSB等で接続された低コストのいわゆるウェブカメラとし、ドライバモニタリングシステムとしては、例えばTrackEye(登録商標)と呼ばれるソフトウェアを用いることができる。TrackEye(登録商標)は運転者12の顔および目を検知し、運転者12の注視点の測定を行う。上述の例では車内カメラ20としてTrackEye(登録商標)を例示したが、1秒あたりのフレーム数がより高い、例えばFaceLab systemを用いる方が好適である。
【0052】
図7は、車内カメラ30と車外カメラ20との位置関係を示す。図7で図1と同じ符号を付した個所は同じ要素を示すため、説明は省略する。図7で、点Pw(座標Cx,Cy,Cz)は図4で説明した3次元空間における点であり、運転者12が注視している注視点である。
【0053】
次に、運転者12の注視点Pwの3次元位置計測について説明する。運転者12の注視点Pwの3次元位置計測は、車外カメラ20座標系XcYcZcと車内カメラ30座標系XwYwZwとの統一、運転者12の視直線と車外三角形パッチ(後述)との交点の導出から成り立っている。以下、それぞれの原理を述べる。加えて、両カメラの座標系を統合するために事前に必要となる変換行列の導出方法についても説明する。
【0054】
車外カメラ20座標系XcYcZcと車内カメラ30座標系XwYwZwとの統一.
以下では、車外カメラ20を魚眼ステレオカメラ20と呼び、車内カメラ30を視線計測カメラ30と呼ぶ。車外環境を撮影する魚眼ステレオカメラ20と視線計測を行う視線計測カメラ30(faceLAB のカメラ)はそれぞれ独立した座標系を持っており、車外の3次元環境と視線方向の情報とを統合させるためには、各ステレオカメラ20および30の座標系を世界座標系に統一させる必要がある。本発明では世界座標系を視線計測カメラ30の座標系とし、魚眼ステレオカメラ20のカメラ座標系を視線計測カメラ30の座標系に合わせる。
【0055】
視線計測カメラ30の座標系XwYwZwでの3次元座標(Wx,Wy,Wz)と魚眼ステレオカメラ20の座標系XcYcZcでの3次元座標(Cx,Cy,Cz)との関係は式7のようにユークリッド変換で表す。
【0056】
【数7】
【0057】
あとは変換のパラメータp1、・・・、p12が求まればよい。しかし、本発明で用いる二組のステレオカメラ(車内カメラ30用、車外カメラ20用)には共通する撮影領域がないため、一般的な校正器具を用いたカメラ校正は不可能である。そこで、予め運転者12が座席に座った状態で所定のマーカーに注目してもらい、その時に視線計測カメラ30から取得できる運転者12の視線方向の情報と上記マーカーの魚眼カメラ20座標系における3次元座標とから、カメラ座標系を統合する校正用パラメータを求める手法を以下のように考案した。つまり、二つのステレオカメラ20および30が校正器具を共通して撮影できないため、代わりに運転者12(または作業者)の視線データを介して両ステレオカメラ20および30の情報をつなげる役割を持たせる。上記マーカーは車両10のボンネットまたはフロントガラスに設置した。
【0058】
図8は、視線計測カメラ30により運転者12の視線方向を計測する状況を示す。図8で図1および図6と同じ符号を付した個所は同じ要素を示すため、説明は省略する。図8で符号Sは運転者12の視直線、12L、12Rは運転者12の左右の眼球を模式的に示したものであり、Ψpitchは眼球12L等の縦方向回転のピッチ角成分、Ψyawは眼球12L等の横方向回転のヨー角成分であり、(Ψpitch,Ψyaw)で眼球回転角度を構成し、(ex,ey,ez)は眼球12L等の位置座標である。
【0059】
眼球回転角度および眼球12L等の位置座標はいずれも両眼のデータが視線計測カメラ30により得られる。本発明ではこれら両眼のデータに関して各データの平均値をとり, それを眼球回転角度と眼球位置座標と定義する。左眼12Lの眼球回転角度を(Ψpitchl,Ψyawl)、眼球位置座標を(exl,eyl,ezl)とし、右眼12Rの眼球回転角度を(Ψpitchr,Ψyawr)、眼球位置座標を(exr,eyr,ezr)とすると、式8〜12のように表わすことができる。
【0060】
【数8】
【0061】
以上の準備に基づき、カメラ座標系を統合する校正用パラメータを求める手法について説明する。世界座標系における視線を表す直線(視直線S)は眼球位置座標(ex,ey,ez)および視直線Sの方向を示す視線方向ベクトル(nx,ny,nz)より式13のように書くことができる。
【0062】
【数9】
【0063】
式13でkは任意の実数である。視線方向ベクトルは眼球回転角度を用いると, 式14のように書くことができる。
【0064】
【数10】
【0065】
式13および14より、世界座標系における視直線Sの方程式は式15のように書くことができる。以下で、眼球回転角度(Ψpitch,Ψyaw)を簡単に(Ψp,Ψy)と書く場合もある。
【0066】
【数11】
【0067】
式7と式15とを等しいとおくことにより、少なくとも3点(精度を向上させるためにはより多くの点)のデータが取得できれば方程式7を解いてパラメータp1、...,p12を求めることができる。図3に戻り、符号72は視線計測カメラ30を用いて取得された、世界座標系における点Pw(所定の点)を注視する際の運転者12の両眼球12Lおよび12Rの眼球回転角度および眼球位置座標と上記点Pwの座標とを対応させて記録した視線情報DB(視線情報記録部)である。図3の機能ブロック50に示される変換パラメータ算出部53(変換パラメータ算出手段)は、上述のようにして、3次元座標算出部52により求められた車外の3次元空間における点Pwの座標をユークリッド変換して視線情報DB72に記録された世界座標系における点Pwの座標とする際の式7の変換パラメータp1、...,p12を求めることができる。次に、求められた変換パラメータp1、...,p12を式7に用いることにより、魚眼レンズカメラ20の画像上の全ての画素の座標(Cx,Cy,Cz)について世界座標における3次元座標(Wx,Wy,Wz)を計算することができる。図3の機能ブロック50に示される画素座標算出部54(画素座標算出手段)は、変換パラメータ算出部53により求められた式7の変換パラメータp1、...,p12を用いて、車外画像DB70に記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報DB74(画素座標情報記録部)に記録する。
【0068】
運転者12の視直線Sと車外三角形パッチとの交点の導出.
魚眼レンズカメラ20の画像上の全ての画素について3次元座標が計算できたら隣り合う画素ごとに組を作り、三角形パッチを構成する。この時、画像(u,v)のv座標が0または偶数の場合は(u,v)、(u+1,v)、(u,v+1)の三点で、v座標が奇数の場合は(u,v)、(u−1,v)、(u,v−1)の三点で三角形パッチを作るものとする(所定の方式)。この処理により、車両10を取り巻く車外環境を三角形パッチの集合として構成することができる。図3に戻り、図3の機能ブロック50に示される三角形パッチ構成部55(三角形パッチ構成手段)は、画素座標情報DB74に記録された隣り合う3つの画素毎に上述した所定の方式で三角形パッチを構成し、当該三角形パッチに関する情報を三角形パッチ情報DB76(三角形パッチ情報記録部)に記録する。この世界座標系における車外三角形パッチと視直線Sとの交点を運転者12の注視点とする。車両10を取り巻く車外の3次元環境が三角形パッチ群で構成されているため、いずれかの三角形パッチと運12視直線Sとが交点を持つことになる。
【0069】
図9は、運転者12の視直線Sと車外三角形パッチとの交点の導出を説明するための図である。図9でp1=(p1x,p1y,p1z)、p2=(p2x,p2y,p2z)p3=(p3x,p3y,p3z)は三角形パッチを個性する3点の3次元座標である。この3点で張られる平面の方程式は式16のようになる。
【0070】
【数12】
【0071】
式15および式16より、式18が得られる。
【0072】
【数13】
【0073】
但し、ベクトルvは式19であるものとする。
【0074】
【数14】
【0075】
ここで、
【0076】
【数15】
【0077】
とすると、クラメールの公式より、
【0078】
【数16】
【0079】
となる。
【0080】
【数17】
【0081】
なので、式23のように書くことができる。
【0082】
【数18】
【0083】
これを解いて、もし上記式17の条件を満たす場合は三角形パッチp1p2p3の内部で視直線Sと交点Pwを持ち、式17の条件を満たさない場合は三角形パッチp1p2p3とは交点を持たない。交点を持つときにはそのときのkを式15に代入することにより、注視点Pwの3次元座標を得ることができる。図3に戻り、図3の機能ブロック50に示される交点算出部56(交点算出手段)は、視線情報DB72に記録された世界座標系における点Pw(所定の点)を注視する際の運転者12の両眼球12L等の眼球回転角度および眼球位置座標と所定の点の座標とから得られる運転者12の視直線Sと、三角形パッチ情報DB76に記録された三角形パッチp1p2p3との交点Pwを有する三角形パッチp1p2p3を上述した運転者12の視直線Sと車外三角形パッチp1p2p3との交点の導出で説明した方法(所定の方法)により求める。当該交点Pwを運転者12の注視点の3次元座標とし、当該注視点の位置座標を時間の経過と共に注視点位置座標DB78(注視点位置座標記録部)に記録する。
【0084】
上述した方法は、3点の座標と視線方向ベクトルSから立てた式18とをクラメールの公式で解くことにより、交点を持つかどうか(パラメータs、t)と交点座標のパラメータkとを同時に求めている。これとは別に、平面の方程式を求めてから交点座標を導出し、その後で当該交点が三角形パッチ内にあるかどうかを調べる方法もある。図9に示される三角形パッチp1p2p3を三角形パッチABCとする。A=(ax,ay,az)、B=(bx,by,bz)C=(cx,cy,cz)とする。点Pwは同じ座標のままでP(Wx,Wy,Wz)とする。世界座標系における空間中の三点(A,B,C)を含む平面の方程式は式24のように書くことができる。
【0085】
【数19】
【0086】
式24で、α、β、γはベクトルABとベクトルACとの外積から求められる要素であり、式25ないし27のように求めることができる。
【0087】
【数20】
【0088】
運転者12の視直線Aを上述した眼球回転角度と眼球位置座標とを用いて表すと, 式28のように書くことができる。
【0089】
【数21】
【0090】
式24と式28との連立方程式により、kについての一次式(式29)を導出することができる。
【0091】
【数22】
【0092】
式29でkを求め式28に代入することにより、平面ABCと視直線Sとの交点P(Wx,Wy,Wz)を求めることができる。点Pが平面ABCの内部に存在するとき、式30のように書くことができる。
【0093】
【数23】
【0094】
式30の条件を満たす交点P(Wx,Wy,Wz)を注視点の3次元位置座標と定義することができる。
【0095】
図10は、上述した本発明の3次元範囲計測プログラムを構成する二眼ステレオ法の処理の流れをフローチャートで示す。図10に示されるように、まず、車外画像DB70に記録された左右の車外画像に対して式6に示される条件(所定の条件)を満たす画素の集合としてエピポーラ線を求め、当該エピポーラ線上を探索することにより左右の車外画像における対応点を求める(ステップS50。対応点マッチングステップ)。対応点マッチングステップ(ステップS50)で対応点が求められた画素については当該画素に投影される車外の3次元空間における点の位置座標を求めると共に、対応点が求められなかった画素については当該画素の周辺画素から補間を行うことにより当業者該画素に投影される車外の3次元空間における点の座標を求める(ステップS52。3次元座標算出ステップ)。3次元座標算出ステップ(ステップS52)で求められた車外の3次元空間における点の座標をユークリッド変換して視線情報DB72に記録された世界座標系における所定の点の座標とする際の変換パラメータp1、...,p12を求める(変換パラメータ算出ステップ。ステップS54)。変換パラメータ算出ステップ(ステップS54)で求められた変換パラメータp1、...,p12を用いて、車外画像DB70に記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報DB74に記録する(ステップS56または図2に示されるステップS22。画素座標算出ステップ)。画素座標情報DB74に記録された隣り合う3つの画素毎に所定の方式で三角形パッチを構成し、当該三角形パッチに関する情報を三角形パッチ情報DB76に記録する(ステップS58または図2に示されるステップS24。三角形パッチ構成ステップ)。視線情報DB72に記録された世界座標系における所定の点を注視する際の運転者12の両眼球12L等の眼球回転角度および眼球位置座標と当該所定の点の座標とから得られる運転者12の視直線Sと、三角形パッチ情報DB76に記録された三角形パッチとの交点Pwを有する三角形パッチを所定の方法により求め、当該交点を運転者12の注視点の3次元座標とし、当該注視点の位置座標を時間の経過と共に注視点位置座標DB78に記録する(ステップS60または図2に示されるステップS40。交点算出ステップ)。
【0096】
以上のように、本発明の実施例1によれば、3次元範囲計測システム1は車両10の車外環境をステレオ計測する2台の広角レンズカメラを有する車外カメラ20(座標は車両10の進行方向がZc軸、Zc軸に垂直にXc軸およびYc軸)と、運転者12の視線方向を計測する車内カメラ30(座標は運転者方向がZw軸、Zw軸に垂直にXw軸およびYw軸)と、車外カメラ20および車内カメラ30に接続されたPC40とから構成されている。車外カメラ20の広角レンズカメラは魚眼レンズカメラであることが好適であるが、これに限定されるものではない。車内カメラ20は、車内に設置されたCCD等のイメージセンサを用いて運転者12の両眼球12L等の眼球回転角および眼球位置座標を取得する。
【0097】
車内カメラ30により運転者12の顔画像が撮像されて視線計測処理が行われ、運転者12の眼球位置座標および眼球回転角が求められる。並行して車外カメラ20により車外画像が撮像されて車外ステレオ処理が実行される。車内カメラ30の座標系と車外カメラ20の座標系とは異なるため、運転者12の視線方向の情報と車外の3次元環境の情報とを統合するためには、左右の各魚眼ステレオカメラ30L等の座標系を世界座標系に統一させる必要がある。本発明の3次元範囲計測プログラム等では、車内カメラ30の座標系XwYwZwを世界座標系とし車外カメラ20の座標系XcYcZcを車内カメラ30の座標系に合わせた。
【0098】
本発明で用いる二組の魚眼ステレオカメラ(車内用、車外用)には共通する撮影領域がないため、一般的な校正器具を用いたカメラ校正は不可能である。そこで、予め運転者12が車両10の座席に座った状態で所定の位置においたマーカーを注目してもらい、その時に車内カメラ30(faceLAB) から取得できる運転者12の視線方向の情報と上記マーカーの魚眼カメラ座標系における3次元座標とから、カメラ座標系を統合する校正用パラメータを求める手法を考案した。車外カメラ20の計測から得られた車外環境の画像上の隣接する3つの画素毎に三角形パッチを構成する。次に、車内カメラ30の計測から得られた運転者の視直線と三角形パッチとの交点を運転者12の注視点の3次元座標とする。種々の情報を記録装置42に記録した後、上述した処理を繰返す。
【0099】
本発明では、等距離射影式の魚眼レンズカメラによる、透視投影モデルに変換しない二眼ステレオ法を考案した。まず、車外画像DB70に記録された左右の車外画像に対して式6に示される条件を満たす画素の集合としてエピポーラ線を求め、当該エピポーラ線上を探索することにより左右の車外画像における対応点を求める。対応点が求められた画素については当該画素に投影される車外の3次元空間における点の位置座標を求めると共に、対応点が求められなかった画素については当該画素の周辺画素から補間を行うことにより当業者該画素に投影される車外の3次元空間における点の座標を求める。求められた車外の3次元空間における点の座標をユークリッド変換して視線情報DB72に記録された世界座標系における所定の点の座標とする際の変換パラメータp1、...,p12を求める。求められた変換パラメータp1、...,p12を用いて、車外画像DB70に記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報DB74に記録する。画素座標情報DB74に記録された隣り合う3つの画素毎に所定の方式で三角形パッチを構成し、当該三角形パッチに関する情報を三角形パッチ情報DB76に記録する。視線情報DB72に記録された世界座標系における所定の点を注視する際の運転者12の両眼球12L等の眼球回転角度および眼球位置座標と当該所定の点の座標とから得られる運転者12の視直線Sと、三角形パッチ情報DB76に記録された三角形パッチとの交点Pwを有する三角形パッチを所定の方法により求め、当該交点を運転者12の注視点の3次元座標とし、当該注視点の位置座標を時間の経過と共に注視点位置座標DB78に記録する。
【0100】
以上のようにして、車両10等の運転者12の3次元的な認知領域の広がりを計測することができる3次元範囲計測システム等を提供することができる。
【実施例2】
【0101】
実施例2では実施例1で得られた注視点位置座標DB78を用いて、運転者12の注視点からの3次元凸包を生成する方法について説明する。運転手12の眼球12L等を基点とした過去tフレーム間の視線方向ベクトル(注視点べクトル)で構成される3次元凸包を有効視空間と定義する。有効視空間の計測中にも車両は走行しているので、運転手の眼球位置(視線計測カメラ座標系)から伸びる視直線Sを基準とし、そこからの注視点の3次元位置の相対的な変化から有効視空間を構築する。注視点の位置ベクトル群から3次元凸包を構成し、この内部領域を有効視空間として求める。
【0102】
図11は、本発明の実施例2における有効視空間を説明するための図である。図11(A)で、符号100はハザード(車外における対象物であって特に運転者12が注意を向ける必要があるもの)、102は有効視空間である。図11(B)はxz平面(実施例1における車外カメラ20の座標系でのXcZc平面)に射影された場合の有効視区間102xzを示し、図11(C)はyz平面(実施例1における車外カメラ20の座標系でのYcZc平面)に射影された場合の有効視区間102yzを示す。図11(A)に示されるように、運転者12の有効視空間102内にハザード100が含まれているため、運転者12はハザード100を認知していることがわかる。
【0103】
図3に示される機能ブロック50の有効視空間算出部57(有効視空間算出手段)は、注視点位置座標DB78に記録された過去tフレーム間分(所定の時間分)の注視点座標から構成される3次元凸包を運転手の有効視空間として求める。即ち、時系列の注視点群から3次元凸包を生成することにより、その領域を有効視空間とする。以下、詳細に説明する。
【0104】
tフレーム分の注視点座標をX={x1,x2、・・・,xt}とするとき、これらから構成される3次元凸包を運転者12の有効視空間とする。具体的には注視点座標の集合において、
【0105】
【数24】
の条件を満たすすべての凸結合
【0106】
【数25】
【0107】
の共通部分(凸包)C を求める。凸包のデータ構造は、3次元凸多面体の境界を平面グラフと考え、二重連結リストで保持する。図12は、逐次添加法によって3次元凸包を求めるアルゴリズム(非特許文献7参照)をフローチャートで示す。図12に示されるように、x1,x2 ,x3,x4の4点で凸包(四面体)C(X4)を構成する(ステップS70)。m=5とする(ステップS72)。m個目の点xmをC(Xm−1) に加えてC(Xm)を作成する(ステップS74)。もしxm がC(Xm−1)の内部にある場合、xmは凸包C(Xm)の内部の点であるため、何もしないでステップS80へ進む(ステップS76)。そうでない場合、可視面を削除して地平面の辺とxmとで構成できる面を新たなファセットとして追加する(ステップS78)。ステップS80でm≠tでなければmを1加算してステップS74へ戻る(ステップS80、S82)。
【0108】
可視面の求め方:xi、xj、xkの順の有効連結リストのファセットにおいて、{(xi−xj)×(xj−xk)}・(xi−xm)>0ならそのファセットは可視面である。
地平面の求め方:削除した可視面と辺を共有するファセットがxmに対して不可視面であればその辺は地平面の辺である。
【0109】
図13は逐次追加の様子を例示する。図13(A)はm個目の点xmを凸包C(Xm−1) に加える状態を示し、図13(B)はm個目の点xmが凸包C(Xm−1) に加えられて凸包C(Xm)が生成された状態を示す。
【0110】
以上のように、本発明の実施例2によれば、運転手12の眼球12L等を基点とした過去tフレーム間の視線方向ベクトル(注視点べクトル)で構成される3次元凸包を有効視空間と定義する。運転者12の有効視空間102内にハザード100が含まれていれば、運転者12はハザード100を認知していることがわかる。有効視空間算出部57は、注視点位置座標DB78に記録された過去tフレーム間分(所定の時間分)の注視点座標から構成される3次元凸包を運転手の有効視空間として求める。即ち、時系列の注視点群から3次元凸包を生成することにより、その領域を有効視空間とする。3次元凸包は逐次添加法によって求めることができる。以上により、運転者12の心理状態等の心的要因によって変化する3次元的な有効視野(有効視空間)の時間的変化を測定することができる3次元範囲計測システム等を提供することができる。
【実施例3】
【0111】
実施例3では、実施例2で説明した有効視空間を運転者12に対して表示する例について説明する。図3に示される機能ブロック50の有効視空間表示部58(有効視空間表示手段)は、有効視空間算出部57により算出された有効視空間の路面上への正射影像を求め、コンピュータ40に接続された表示装置84(後述)に当該正射影像を所定の方式で表示する。
【0112】
図14は、本発明の実施例3における有効視空間の表示例を示す。有効視空間102の広さを色で表し(原図)、十分広い有効視空間が保たれている場合は緑色で表示し(図14(A)の広く且つ遠方状態、図14(B)の広く且つ近い状態)、有効視空間が狭まっているときには赤色で警告をするように表示する(図14(C)の狭く且つ近い状態、図14(D)の狭く且つ遠方状態)。有効視空間外にハザード(歩行者など車両の進路方向にあって衝突可能性の有るもの)が存在する場合にはピクトグラム(図14(C)の自転車100a、図14(D)の歩行者100b)を表示して運転者12に注意を促す。但し、表示する有効視空間の最大奥行きは車外のステレオ計測精度に依存する。遠方まで正確な計測ができるカメラを使用する場合には表示できる有効視空間の大きさも広くなる。表示する有効視空間の左右の広がりも車外のステレオ計測性能に依存する。広視野領域を精度よく計測できる魚眼カメラの場合には表示できる左右の広がりも広くなる。
【0113】
以上のように、本発明の実施例3によれば、有効視空間算出部57により算出された有効視空間の路面上への正射影像を求め、コンピュータ40に接続された表示装置84(後述)に当該正射影像を所定の方式で表示する。この結果、水平視野角、垂直視野角、奥行きを映像で表示し、色による有効視空間の大きさ表現、見落としハザードの表示を行うことができる。
【実施例4】
【0114】
実施例4では、実施例2で説明した有効視空間を利用した種々の運転支援の仕組みについて説明する。図3に示される機能ブロック50のハザード座標検出部59(ハザード検出手段)は、車両10の運転者12から見える3次元空間の範囲内に存在するハザードの座標を検出し、警告部59(警告手段)はハザード座標検出部59により検出されたハザードの座標と注視点位置座標DB78に記録された所定の時間分の注視点座標とに基づき、所定の警告を発する。
【0115】
ハザード座標検出部59は、車外画像DB70に記録された車外画像から所定の動物体解析手法により車両10の外のハザードを検出して車外カメラ20の座標系で特定し、その後当該座標を上述した方法と同様にして車内カメラ30の座標系へ合わせる。所定の動物体解析手法としては既存技術であるオプティカルフローアルゴリズムによる解析手法が好適である。発明者らはHalcon(登録商標) machine vision library function(optical_flow_mg())を使用した。詳細は、Halcon(登録商標) reference manual(http://www/mvtec.com/download/documentation/reference-9.0/hdevelop/optical_flow_mg.html)を参照されたい。
【0116】
ハザード座標検出部59により検出されたハザードの座標と注視点位置座標DB78に記録された所定の時間分の注視点座標とを用いることにより、運転者12がハザードを見ていたのか否かを特定することができる。言い換えれば、運転者12があるハザードを見落としていたことも特定できる。ハザードの3次元座標は上述したように得ることができるため、高価なレーザ装置を用いなくても車両10とハザードとの間の距離を測定することもできる。従って当該距離と車両10の走行速度とからハザードに衝突するまでの時間も得ることができる。このため、より正確な警告(音声または画像表示)を発することができる。加えて、運転者12の視線計測ができるため、運転者12が計器類、同乗者等に気を取られて前方を見ないというディストラクション(distraction)を検知することも可能である。
【0117】
以上のように、本発明の実施例4によれば、ハザード座標検出部59により検出されたハザードの座標と注視点位置座標DB78に記録された所定の時間分の注視点座標とを用いることにより、種々の正確な警告を発することができる。このため、本発明の3次元範囲計測システムを車両10に搭載することにより、より安全性が高く且つ安価な車両10を提供することが可能となる。
【実施例5】
【0118】
図15は、本発明の3次元範囲計測プログラムを実行するPC(コンピュータ)40の内部回路80を示すブロック図である。図15に示されるように、CPU81、ROM82、RAM83、画像制御部86、コントローラ87、入力制御部90および外部I/F部92はバス93に接続されている。図15において、上述した本発明の3次元範囲計測プログラムは、ROM82、ディスク88(又は44)、DVD若しくはCD−ROM89等の記録媒体(脱着可能な記録媒体を含む)に記録されている。ディスク88(又は44)には、上述した種々の車外画像DB70、視線情報DB72、画素座標情報DB74、三角形パッチ情報DB76、注視点位置座標DB78等を記録しておくことができる。3次元範囲計測プログラムは、ROM82からバス93を介し、あるいはディスク88又はDVD若しくはCD−ROM89等の記録媒体からコントローラ87を経由してバス93を介しRAM83へロードされる。画像制御部86は、有効視空間表示部58または警告部60等により表示される種々の画面の画像データをVRAM85へ送出する。表示装置(ディスプレイ)84はVRAM85から送出された上記データ等を表示する。VRAM85は表示装置84の一画面分のデータ容量に相当する容量を有している画像メモリである。入力操作部91はPC40に入力等を行うためのマウス、キーボード等の入力装置であり、入力制御部90は入力操作部91と接続され入力制御等を行う。外部I/F部92はPC40の外部にある車外カメラ20および車内カメラ30と接続する際のインタフェース機能を有している。
【0119】
上述したようにコンピュータ(CPU)81が本発明の3次元範囲計測プログラムを実行することにより、本発明の目的を達成することができる。3次元範囲計測プログラムは上述のようにDVD若しくはCD−ROM89等の記録媒体の形態でコンピュータ(CPU)81に供給することができ、3次元範囲計測プログラムを記録したDVD若しくはCD−ROM89等の記録媒体も同様に本発明を構成することになる。3次元範囲計測プログラムを記録した記録媒体としては上述された記録媒体の他に、例えばメモリ・カード、メモリ・スティック、光ディスク等を用いることができる。
【0120】
上述した各実施例の説明では、図2の事前のカメラ校正(ステップS1)については触れなかった。本発明においても、既存の手法を用いて事前のカメラ校正を行っており、カメラの内部パラメータ(これは焦点距離、レンズ歪み、画素サイズなどから成る)を事前に得ている。この校正が事前に行えているという前提で、上述した式1からは、カメラの内部パラメータで正規化した(レンズの歪などの影響を取り除いた)ul、vl等を利用している。式1、2の焦点距離fも事前のカメラ校正で求めた数値を利用している。
【産業上の利用可能性】
【0121】
本発明の活用例として、事故防止ツールに適用することができる。わが国の交通事故を法令違反別に見ると、安全不確認が約3割と最も多いと言われている。事故と視覚認知特性との関連では、特に中高年の有効視野と事故率との相関が高いことも報告されている。このため、本発明の3次元範囲計測システム1等(特に有効視空間表示部58の機能)を利用して、交通状況に応じた自身の有効視空間を常時把握することにより、過大評価することなく、安全運転スタイルを心がけるようにすることができる。
【符号の説明】
【0122】
1 3次元範囲計測システム、 10 車両、 12 運転者、 12L、12R 眼球、 20、25L、25R 車外カメラ、 30、30L、30R 車内カメラ、 40 PC、 42 記録装置、 50 機能ブロック、 51 対応点マッチング部、 52 3次元座標算出部、 53 変換パラメータ算出部、 54 画素座標算出部、 55 三角形パッチ構成部、 56 交点算出部、 57 有効視空間算出部、 58 有効視空間表示部、 59 ハザード座標検出部、 60 警告部、 70 車外画像DB、 72 視線情報DB、 74 画素座標情報DB、 76 三角形パッチ情報DB、 78 注視点位置座標DB、81 CPU、 82 ROM、 83 RAM、 84 表示装置、 85 VRAM、 86 画像制御部、 87 コントローラ、 88 ディスク、 89 CD−ROM、 80 入力制御部、 91 入力操作部、 92 外部I/F部、 93 バス 100 ハザード、 102 有効視空間。
【先行技術文献】
【非特許文献】
【0123】
【非特許文献1】那倉達哉、入倉隆著、「疲労と有効視の関係」, 照明学会誌, 第89 巻, 第11号,2005.
【非特許文献2】McConkie George W. and RaynerKeith: “The span of the effective stimulus during a fixationsin reading”, Perceptionand Psychophisics,17, pp.578-586,1975.
【非特許文献3】三浦利章著、「行動場面における視覚的認知」, 日本心理学会第48回大会発表論文集, S68−69,1984.
【非特許文献4】立花康夫, 河合敏勝, 小林洋介, 栗原哲也, 菊池孝之著、「魚眼レンズ写真から任意焦点レンズ画像への変換」, 電子情報通信学会技術研究報告. SIP, 信号処理: IEICE technical report107,No.22, pp.25-30, 2007.
【非特許文献5】加瀬翔太, 奥津良太, 光本尚訓, 新垣洋平, 下村倫子, 寺林賢司, 梅田和昇著、「複数の魚眼カメラの内部・外部パラメータの同定による俯瞰画像生成」, 電気学会研究会資料. IP, 情報処理研究会2008, No.13, pp.43−48, 2008.
【非特許文献6】永森千貴, 西本武志, 山口順一著、「魚眼ステレオ視覚センサ」, 第12 回画像センシングシンポジウム予稿集, pp.137−140, 2006.
【非特許文献7】K.L. Clarkson and P.W. Shor: “Applications of random sampling incomputational geometry,II”, Discrete Computer Geometry, No.4, pp.387−421,1989.
【特許請求の範囲】
【請求項1】
車両の運転者から見える3次元空間の範囲を計測する3次元範囲計測システムであって、車外環境をステレオ計測する2台の広角レンズカメラを有する車外撮像器と、運転者の視線方向を計測する車内撮像器と、該車外撮像器及び該車内撮像器に接続されたコンピュータとを備え、コンピュータが、
前記車内撮像器の座標系を世界座標系とし前記車外撮像器の座標系を該車内撮像器の座標系に合わせ、該車内撮像器の計測から得られた運転者の視直線と該車外撮像器の計測から得られた車外環境の画像上の隣接する3つの画素毎に設定された三角形パッチとの交点を運転者の注視点の3次元座標とすることにより、運転者から見える3次元空間の範囲を測定することを特徴とする3次元範囲計測システム。
【請求項2】
請求項1記載の3次元範囲計測システムにおいて、前記車外撮像器は車外に設置された等距離射影方式の左右の魚眼レンズカメラを広角レンズカメラとして用い、前記車内撮像器は車内に設置されたイメージセンサを用いて運転者の両眼球の回転角度及び位置座標を取得することを特徴とする3次元範囲計測システム。
【請求項3】
請求項2記載の3次元範囲計測システムにおいて、前記コンピュータは、
前記車外撮像器を用いて撮像された左右の魚眼レンズカメラによる左右の車外画像を記録した車外画像記録部と、
前記車内撮像器を用いて取得された、世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とを対応させて記録した視線情報記録部と、
前記車外画像記録部に記録された左右の車外画像に対して所定の条件を満たす画素の集合としてエピポーラ線を求め、該エピポーラ線上を探索することにより左右の車外画像における対応点を求める対応点マッチング手段と、
前記対応点マッチング手段により対応点が求められた画素については該画素に投影される車外の3次元空間における点の位置座標を求めると共に、対応点が求められなかった画素については該画素の周辺画素から補間を行うことにより該画素に投影される車外の3次元空間における点の座標を求める3次元座標算出手段と、
前記3次元座標算出手段により求められた車外の3次元空間における点の座標をユークリッド変換して前記視線情報記録部に記録された世界座標系における所定の点の座標とする際の変換パラメータを求める変換パラメータ算出手段と、
前記変換パラメータ算出手段により求められた変換パラメータを用いて、前記車外画像記録部に記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報記録部に記録する画素座標算出手段と、
前記画素座標情報記録部に記録された隣り合う3つの画素毎に所定の方式で三角形パッチを構成し、該三角形パッチに関する情報を三角形パッチ情報記録部に記録する三角形パッチ構成手段と、
前記視線情報記録部に記録された世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とから得られる運転者の視直線と、前記三角形パッチ情報記録部に記録された三角形パッチとの交点を有する三角形パッチを所定の方法により求め、該交点を運転者の注視点の3次元座標とし、該注視点の位置座標を時間の経過と共に注視点位置座標記録部に記録する交点算出手段とを備えたことを特徴とする3次元範囲計測システム。
【請求項4】
請求項3記載の3次元範囲計測システムにおいて、前記注視点位置座標記録部に記録された所定の時間分の注視点座標から構成される3次元凸包を運転手の有効視空間として求める有効視空間算出手段をさらに備えたことを特徴とする3次元範囲計測システム。
【請求項5】
請求項4記載の3次元範囲計測システムにおいて、前記有効視空間算出手段により算出された有効視空間の路面上への正射影像を求め、前記コンピュータに接続された表示装置に該正射影像を所定の方式で表示する有効視空間表示手段をさらに備えたことを特徴とする3次元範囲計測システム。
【請求項6】
請求項3乃至5のいずれかに記載の3次元範囲計測システムにおいて、
車両の運転者から見える3次元空間の範囲内に存在するハザードの座標を検出するハザード座標検出手段と、
前記ハザード座標検出手段により検出されたハザードの座標と前記注視点位置座標記録部に記録された所定の時間分の注視点座標とに基づき、所定の警告を発する警告手段とをさらに備えたことを特徴とする3次元範囲計測システム。
【請求項7】
車両の運転者から見える3次元空間の範囲を計測する3次元範囲計測プログラムであって、車外環境をステレオ計測する2台の広角レンズカメラを有する車外撮像器と、運転者の視線方向を計測する車内撮像器と、該車外撮像器及び該車内撮像器に接続されたコンピュータとを用いるものであり、コンピュータに、
前記車内撮像器の座標系を世界座標系とし前記車外撮像器の座標系を該車内撮像器の座標系に合わせ、該車内撮像器の計測から得られた運転者の視直線と該車外撮像器の計測から得られた車外環境の画像上の隣接する3つの画素毎に設定された三角形パッチとの交点を運転者の注視点の3次元座標とすることにより、運転者から見える3次元空間の範囲の測定を実行させるための3次元範囲計測プログラム。
【請求項8】
請求項7記載の3次元範囲計測プログラムにおいて、前記車外撮像器は車外に設置された等距離射影方式の左右の魚眼レンズカメラを広角レンズカメラとして用い、前記車内撮像器は車内に設置されたイメージセンサを用いて運転者の両眼球の回転角度及び位置座標を取得することを特徴とする3次元範囲計測プログラム。
【請求項9】
請求項8記載の3次元範囲計測プログラムにおいて、前記コンピュータは、
前記車外撮像器を用いて撮像された左右の魚眼レンズカメラによる左右の車外画像を記録した車外画像記録部と、
前記車内撮像器を用いて取得された、世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とを対応させて記録した視線情報記録部とをさらに用い、コンピュータに、
前記車外画像記録部に記録された左右の車外画像に対して所定の条件を満たす画素の集合としてエピポーラ線を求め、該エピポーラ線上を探索することにより左右の車外画像における対応点を求める対応点マッチングステップ、
前記対応点マッチングステップで対応点が求められた画素については該画素に投影される車外の3次元空間における点の位置座標を求めると共に、対応点が求められなかった画素については該画素の周辺画素から補間を行うことにより該画素に投影される車外の3次元空間における点の座標を求める3次元座標算出ステップ、
前記3次元座標算出ステップで求められた車外の3次元空間における点の座標をユークリッド変換して前記視線情報記録部に記録された世界座標系における所定の点の座標とする際の変換パラメータを求める変換パラメータ算出ステップ、
前記変換パラメータ算出ステップで求められた変換パラメータを用いて、前記車外画像記録部に記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報記録部に記録する画素座標算出ステップ、
前記画素座標情報記録部に記録された隣り合う3つの画素毎に所定の方式で三角形パッチを構成し、該三角形パッチに関する情報を三角形パッチ情報記録部に記録する三角形パッチ構成ステップ、
前記視線情報記録部に記録された世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とから得られる運転者の視直線と、前記三角形パッチ情報記録部に記録された三角形パッチとの交点を有する三角形パッチを所定の方法により求め、該交点を運転者の注視点の3次元座標とし、該注視点の位置座標を時間の経過と共に注視点位置座標記録部に記録する交点算出ステップを実行させることを特徴とする3次元範囲計測プログラム。
【請求項10】
請求項9記載の3次元範囲計測プログラムにおいて、前記注視点位置座標記録部に記録された所定の時間分の注視点座標から構成される3次元凸包を運転手の有効視空間として求める有効視空間算出ステップをさらに備えたことを特徴とする3次元範囲計測プログラム。
【請求項11】
請求項10記載の3次元範囲計測プログラムにおいて、前記有効視空間算出ステップにより算出された有効視空間の路面上への正射影像を求め、前記コンピュータに接続された表示装置に該正射影像を所定の方式で表示する有効視空間表示ステップをさらに備えたことを特徴とする3次元範囲計測プログラム。
【請求項12】
請求項9乃至11のいずれかに記載の3次元範囲計測プログラムにおいて、
車両の運転者から見える3次元空間の範囲内に存在するハザードの座標を検出するハザード座標検出ステップと、
前記ハザード座標検出ステップにより検出されたハザードの座標と前記注視点位置座標記録部に記録された所定の時間分の注視点座標とに基づき、所定の警告を発する警告ステップとをさらに備えたことを特徴とする3次元範囲計測プログラム。
【請求項13】
請求項7乃至12のいずれかに記載の3次元範囲計測プログラムを記録したコンピュータ読取り可能な記録媒体。
【請求項1】
車両の運転者から見える3次元空間の範囲を計測する3次元範囲計測システムであって、車外環境をステレオ計測する2台の広角レンズカメラを有する車外撮像器と、運転者の視線方向を計測する車内撮像器と、該車外撮像器及び該車内撮像器に接続されたコンピュータとを備え、コンピュータが、
前記車内撮像器の座標系を世界座標系とし前記車外撮像器の座標系を該車内撮像器の座標系に合わせ、該車内撮像器の計測から得られた運転者の視直線と該車外撮像器の計測から得られた車外環境の画像上の隣接する3つの画素毎に設定された三角形パッチとの交点を運転者の注視点の3次元座標とすることにより、運転者から見える3次元空間の範囲を測定することを特徴とする3次元範囲計測システム。
【請求項2】
請求項1記載の3次元範囲計測システムにおいて、前記車外撮像器は車外に設置された等距離射影方式の左右の魚眼レンズカメラを広角レンズカメラとして用い、前記車内撮像器は車内に設置されたイメージセンサを用いて運転者の両眼球の回転角度及び位置座標を取得することを特徴とする3次元範囲計測システム。
【請求項3】
請求項2記載の3次元範囲計測システムにおいて、前記コンピュータは、
前記車外撮像器を用いて撮像された左右の魚眼レンズカメラによる左右の車外画像を記録した車外画像記録部と、
前記車内撮像器を用いて取得された、世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とを対応させて記録した視線情報記録部と、
前記車外画像記録部に記録された左右の車外画像に対して所定の条件を満たす画素の集合としてエピポーラ線を求め、該エピポーラ線上を探索することにより左右の車外画像における対応点を求める対応点マッチング手段と、
前記対応点マッチング手段により対応点が求められた画素については該画素に投影される車外の3次元空間における点の位置座標を求めると共に、対応点が求められなかった画素については該画素の周辺画素から補間を行うことにより該画素に投影される車外の3次元空間における点の座標を求める3次元座標算出手段と、
前記3次元座標算出手段により求められた車外の3次元空間における点の座標をユークリッド変換して前記視線情報記録部に記録された世界座標系における所定の点の座標とする際の変換パラメータを求める変換パラメータ算出手段と、
前記変換パラメータ算出手段により求められた変換パラメータを用いて、前記車外画像記録部に記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報記録部に記録する画素座標算出手段と、
前記画素座標情報記録部に記録された隣り合う3つの画素毎に所定の方式で三角形パッチを構成し、該三角形パッチに関する情報を三角形パッチ情報記録部に記録する三角形パッチ構成手段と、
前記視線情報記録部に記録された世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とから得られる運転者の視直線と、前記三角形パッチ情報記録部に記録された三角形パッチとの交点を有する三角形パッチを所定の方法により求め、該交点を運転者の注視点の3次元座標とし、該注視点の位置座標を時間の経過と共に注視点位置座標記録部に記録する交点算出手段とを備えたことを特徴とする3次元範囲計測システム。
【請求項4】
請求項3記載の3次元範囲計測システムにおいて、前記注視点位置座標記録部に記録された所定の時間分の注視点座標から構成される3次元凸包を運転手の有効視空間として求める有効視空間算出手段をさらに備えたことを特徴とする3次元範囲計測システム。
【請求項5】
請求項4記載の3次元範囲計測システムにおいて、前記有効視空間算出手段により算出された有効視空間の路面上への正射影像を求め、前記コンピュータに接続された表示装置に該正射影像を所定の方式で表示する有効視空間表示手段をさらに備えたことを特徴とする3次元範囲計測システム。
【請求項6】
請求項3乃至5のいずれかに記載の3次元範囲計測システムにおいて、
車両の運転者から見える3次元空間の範囲内に存在するハザードの座標を検出するハザード座標検出手段と、
前記ハザード座標検出手段により検出されたハザードの座標と前記注視点位置座標記録部に記録された所定の時間分の注視点座標とに基づき、所定の警告を発する警告手段とをさらに備えたことを特徴とする3次元範囲計測システム。
【請求項7】
車両の運転者から見える3次元空間の範囲を計測する3次元範囲計測プログラムであって、車外環境をステレオ計測する2台の広角レンズカメラを有する車外撮像器と、運転者の視線方向を計測する車内撮像器と、該車外撮像器及び該車内撮像器に接続されたコンピュータとを用いるものであり、コンピュータに、
前記車内撮像器の座標系を世界座標系とし前記車外撮像器の座標系を該車内撮像器の座標系に合わせ、該車内撮像器の計測から得られた運転者の視直線と該車外撮像器の計測から得られた車外環境の画像上の隣接する3つの画素毎に設定された三角形パッチとの交点を運転者の注視点の3次元座標とすることにより、運転者から見える3次元空間の範囲の測定を実行させるための3次元範囲計測プログラム。
【請求項8】
請求項7記載の3次元範囲計測プログラムにおいて、前記車外撮像器は車外に設置された等距離射影方式の左右の魚眼レンズカメラを広角レンズカメラとして用い、前記車内撮像器は車内に設置されたイメージセンサを用いて運転者の両眼球の回転角度及び位置座標を取得することを特徴とする3次元範囲計測プログラム。
【請求項9】
請求項8記載の3次元範囲計測プログラムにおいて、前記コンピュータは、
前記車外撮像器を用いて撮像された左右の魚眼レンズカメラによる左右の車外画像を記録した車外画像記録部と、
前記車内撮像器を用いて取得された、世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とを対応させて記録した視線情報記録部とをさらに用い、コンピュータに、
前記車外画像記録部に記録された左右の車外画像に対して所定の条件を満たす画素の集合としてエピポーラ線を求め、該エピポーラ線上を探索することにより左右の車外画像における対応点を求める対応点マッチングステップ、
前記対応点マッチングステップで対応点が求められた画素については該画素に投影される車外の3次元空間における点の位置座標を求めると共に、対応点が求められなかった画素については該画素の周辺画素から補間を行うことにより該画素に投影される車外の3次元空間における点の座標を求める3次元座標算出ステップ、
前記3次元座標算出ステップで求められた車外の3次元空間における点の座標をユークリッド変換して前記視線情報記録部に記録された世界座標系における所定の点の座標とする際の変換パラメータを求める変換パラメータ算出ステップ、
前記変換パラメータ算出ステップで求められた変換パラメータを用いて、前記車外画像記録部に記録された左右の車外画像上の全ての画素につき世界座標系における座標を計算して画素座標情報記録部に記録する画素座標算出ステップ、
前記画素座標情報記録部に記録された隣り合う3つの画素毎に所定の方式で三角形パッチを構成し、該三角形パッチに関する情報を三角形パッチ情報記録部に記録する三角形パッチ構成ステップ、
前記視線情報記録部に記録された世界座標系における所定の点を注視する際の運転者の両眼球の回転角度及び位置座標と該所定の点の座標とから得られる運転者の視直線と、前記三角形パッチ情報記録部に記録された三角形パッチとの交点を有する三角形パッチを所定の方法により求め、該交点を運転者の注視点の3次元座標とし、該注視点の位置座標を時間の経過と共に注視点位置座標記録部に記録する交点算出ステップを実行させることを特徴とする3次元範囲計測プログラム。
【請求項10】
請求項9記載の3次元範囲計測プログラムにおいて、前記注視点位置座標記録部に記録された所定の時間分の注視点座標から構成される3次元凸包を運転手の有効視空間として求める有効視空間算出ステップをさらに備えたことを特徴とする3次元範囲計測プログラム。
【請求項11】
請求項10記載の3次元範囲計測プログラムにおいて、前記有効視空間算出ステップにより算出された有効視空間の路面上への正射影像を求め、前記コンピュータに接続された表示装置に該正射影像を所定の方式で表示する有効視空間表示ステップをさらに備えたことを特徴とする3次元範囲計測プログラム。
【請求項12】
請求項9乃至11のいずれかに記載の3次元範囲計測プログラムにおいて、
車両の運転者から見える3次元空間の範囲内に存在するハザードの座標を検出するハザード座標検出ステップと、
前記ハザード座標検出ステップにより検出されたハザードの座標と前記注視点位置座標記録部に記録された所定の時間分の注視点座標とに基づき、所定の警告を発する警告ステップとをさらに備えたことを特徴とする3次元範囲計測プログラム。
【請求項13】
請求項7乃至12のいずれかに記載の3次元範囲計測プログラムを記録したコンピュータ読取り可能な記録媒体。
【図10】

【図12】
【図15】
【図1】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図11】
【図13】

【図14】
【図12】
【図15】
【図1】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図11】
【図13】
【図14】
【公開番号】特開2013−24662(P2013−24662A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−158420(P2011−158420)
【出願日】平成23年7月19日(2011.7.19)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(507054456)
【出願人】(509034591)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月19日(2011.7.19)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(507054456)
【出願人】(509034591)
【Fターム(参考)】
[ Back to top ]