
3次元計測装置およびその方法
【課題】計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置を提供する。
【解決手段】撮像装置12により撮像された画像データを含む撮像情報を取得する撮像部11と、撮像情報に基づいて計測対象の3次元座標を取得する3次元形状演算処理部23と、撮像装置12の加速度および姿勢角度を含む位置姿勢情報を撮像情報の取得と同期して取得する位置姿勢計測部14と、位置姿勢情報に基づいて計測原点に対する撮像装置12の移動量・方向と姿勢角度の変化量・方向とを演算する位置姿勢補正処理部17と、撮像情報と同期して取得された撮像装置12の移動量および方向と姿勢角度の変化量および方向とに基づいて3次元形状演算処理部23により得られる3次元座標を平行移動および回転して複数の3次元座標を統合し、計測対象の3次元形状を取得する統合演算処理部24とを備えた。
【解決手段】撮像装置12により撮像された画像データを含む撮像情報を取得する撮像部11と、撮像情報に基づいて計測対象の3次元座標を取得する3次元形状演算処理部23と、撮像装置12の加速度および姿勢角度を含む位置姿勢情報を撮像情報の取得と同期して取得する位置姿勢計測部14と、位置姿勢情報に基づいて計測原点に対する撮像装置12の移動量・方向と姿勢角度の変化量・方向とを演算する位置姿勢補正処理部17と、撮像情報と同期して取得された撮像装置12の移動量および方向と姿勢角度の変化量および方向とに基づいて3次元形状演算処理部23により得られる3次元座標を平行移動および回転して複数の3次元座標を統合し、計測対象の3次元形状を取得する統合演算処理部24とを備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、3次元計測装置およびその方法に関する。
【背景技術】
【0002】
国内外の原子力発電プラントは高経年化が進み、炉内構造物や機器の保守・補修の機会が増加すると考えられる。炉内補修工事等は、補修対象物の形状寸法や補修対象箇所までのアクセスルートの形状寸法等の寸法情報を必要とする。これらの寸法情報は、設計図面情報に依存するだけでなく、アズビルト情報が重要である。さらに、保守・補修を行う企業とは異なる企業により設計されたプラントや、海外のプラントの設計図面情報は、十分に入手できない可能性がある。
【0003】
従来、3次元形状計測の技術には、可視光方式、光学投影方式、レーザ方式などがある。可視光方式は、カメラ2台によるステレオ視等の方式である。光学投影方式は、カメラ1台とレーザ光等の投影光による方式である。レーザ方式は、レーザ等の波長の飛行時間計測等による方式である。
【0004】
可視光方式は、カメラにより瞬間的に面データが取得可能である。しかし、光学投影方式やレーザ方式は、点もしくは線データを取得するため、静止した計測対象の計測中に計測装置を動かすことは困難となるという課題がある。可視光方式は、光学系の被写界深度の関係から、計測位置を極力固定することが望ましい等、計測環境の制約が発生する課題がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平7−218251号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記の方式を適用する3次元計測装置は、計測装置が揺動する状況、例えば構造物に固定されず吊り下げられるような状況にいては、1回の計測が瞬間的に行われない限り面的な情報が取得できないという課題がある。
【0007】
また、点や線データを用いる計測方式の場合に面的な情報を得るためには、3次元計測装置は、仮想的に1回もしくは1箇所(計測原点)で計測したものと同等のデータを取得する必要がある。
【0008】
さらに、3次元計測装置は、揺動する環境下で装置の位置を計測するためには、3軸方向の移動量および姿勢角度を計測する必要がある。これらの計測値には、計測誤差が発生する。累積する計測誤差を低減または補正するため、3次元計測装置は計測空間内における絶対位置の計測が必要となる。しかし、水中や屋内、特に狭隘な空間での計測では絶対位置を計測する方法がなく、絶対位置を利用する方法以外の方法を用いた計測誤差を低減・補正する機能が必要である。
【0009】
本発明はこのような事情を考慮してなされたもので、計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置およびその方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に係る3次元計測装置は、上述した課題を解決するために、少なくとも計測対象面の画像を撮像する撮像装置を有し、前記撮像装置により撮像された画像データを含む撮像情報を取得する撮像部と、前記撮像情報に基づいて、前記計測対象の3次元座標を取得する3次元形状演算処理部と、前記撮像装置の加速度および姿勢角度を含む位置姿勢情報を前記撮像情報の取得と同期して取得する位置姿勢計測部と、前記位置姿勢情報に基づいて、前記計測原点に対する前記撮像装置の移動量および方向と姿勢角度の変化量および方向とを演算する位置姿勢補正処理部と、前記撮像情報と同期して取得された前記撮像装置の移動量および方向と姿勢角度の変化量および方向とに基づいて、前記3次元形状演算処理部により得られる前記3次元座標を平行移動および回転して複数の前記3次元座標を統合し、前記計測対象の3次元形状を取得する統合演算処理部とを備えたことを特徴とする。
【発明の効果】
【0011】
本発明に係る3次元計測装置およびその方法においては、計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる。
【図面の簡単な説明】
【0012】
【図1】本発明に係る3次元計測装置の一実施形態を示すブロック構成図。
【図2】撮像装置および投影装置で得られるデータより3次元形状演算処理部が計測対象の3次元形状(3次元座標)を求める説明図。
【図3】3次元形状計測部の位置姿勢情報に対して行われる計測情報取得処理を説明するフローチャート。
【図4】計測値の計測誤差を補正する際に作成される一例としての概念的なヒストグラムであり、(A)は単峰性、(B)は多峰性を有するヒストグラム。
【図5】本実施形態における3次元計測装置の変形例を示すブロック構成図。
【図6】本実施形態の変形例における3次元形状計測部で得られるデータより3次元形状演算処理部が計測対象の3次元形状(3次元座標)を求める説明図。
【発明を実施するための形態】
【0013】
本発明に係る3次元計測装置およびその方法の一実施形態を添付図面に基づいて説明する。
【0014】
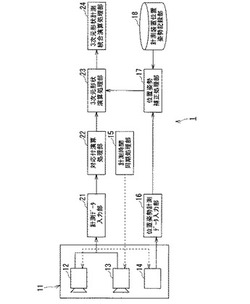
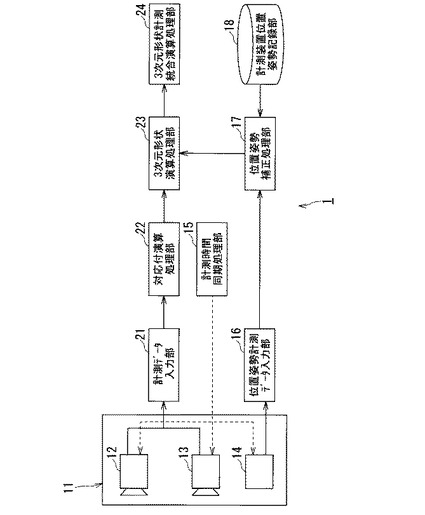
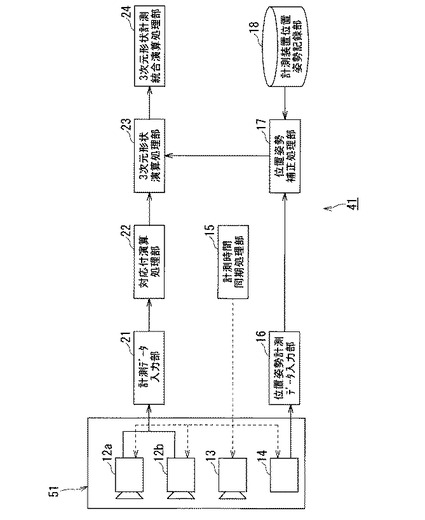
図1は、本発明に係る3次元計測装置の一実施形態を示すブロック構成図である。
【0015】
3次元計測装置1は、気中や水中に存在する構造物であって、例えば原子力発電プラント内の炉内機器を計測対象とする。本実施形態における3次元計測装置およびその方法は、一例として光切断法を用いて3次元計測を行う。
【0016】
3次元形状計測部11は、撮像装置12と投影装置13と位置姿勢計測部14とを有する。3次元形状計測部11は、気中や水中に吊り下げられた状態で支持される。このため、3次元形状計測部11は、揺動する環境下で計測対象の撮像等を行う。
【0017】
撮像装置12は、計測対象の表面を撮像可能な位置に設置され、表面の形状を撮像する。投影装置13は、計測対象の表面にレーザ光などの光を投影可能な位置に設置され、表面に投影模様を投影する。位置姿勢計測部14は、撮像装置12および投影装置13の3軸方向の加速度および姿勢角度(位置姿勢情報)と、位置姿勢情報の取得時間とを計測するセンサである。
【0018】
3次元形状計測部11の撮像装置12の投影中心、投影装置13の投影中心、および位置姿勢計測部14の位置関係は、既知であるものとする。撮像装置12および投影装置13の投影中心は、キャリブレーションにより投影中心を求めるための補間式を事前に求め、演算により決定される。この補間式は、座標が既知であるテストターゲットを撮像した画像および投影画像から焦点距離との関係を求めることで決定される。
【0019】
計測時間同期処理部15は、撮像装置12、投影装置13および位置姿勢計測部14が撮像情報や位置姿勢情報を取得する際の時間同期を取るために、トリガ信号を発生する。
【0020】
位置姿勢計測データ入力部16は、位置姿勢計測部14により計測された撮像装置12および投影装置13の位置姿勢情報と位置姿勢情報の取得時間を入力する。
【0021】
位置姿勢補正処理部17は、撮像装置12および投影装置13の位置姿勢情報および取得時間を用いて、位置姿勢情報を補正する。位置姿勢補正処理部17は、補正された位置姿勢情報に基づいて撮像装置12および投影装置13の3軸方向の移動量および方向と姿勢角度変化量および方向を求める。計測装置位置姿勢記録部18は、位置姿勢補正処理部17の位置姿勢情報等を記録する。
【0022】
計測データ入力部21は、撮像装置12の焦点距離等の機器情報、および撮像装置12により撮像された画像データである撮像情報を入力する。
【0023】
対応付演算処理部22は、撮像装置12により撮像される画像データと投影装置13により投影される投影模様とを画像上で対応付ける。
【0024】
3次元形状演算処理部23は、対応付演算処理部22における処理結果に基づいて計測対象の3次元形状(3次元座標)を取得する。
【0025】
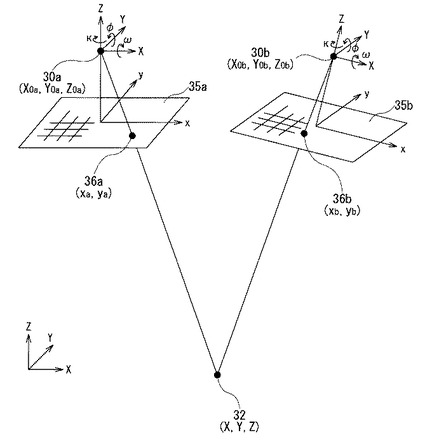
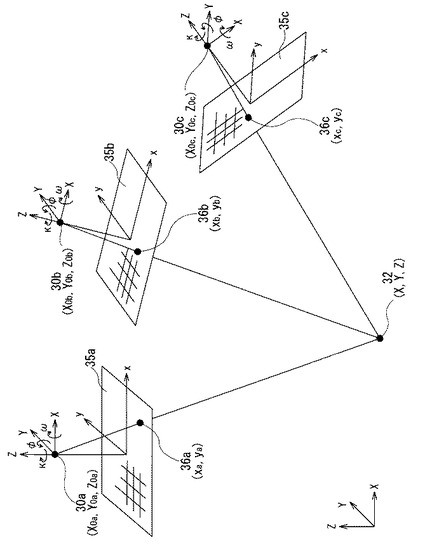
図2は、撮像装置12および投影装置13で得られるデータより3次元形状演算処理部23が計測対象の3次元形状(3次元座標)を求める説明図である。
【0026】
計測対象空間の座標系において、計測対象(計測点)は、撮像装置12の投影中心座標30a(X0a,Y0a,Z0a)で撮像される。また、計測対象は、投影装置13の投影中心座標30b(X0b,Y0b,Z0b)で投影される。
【0027】
計測対象空間上の計測点32(X,Y,Z)は、それぞれの撮像面35aおよび投影面35b上において、対応する画素座標36a(xa、ya)、投影座標36b(xb、ya)として写像される。
【0028】
計測点の3次元座標は、計測点の投影中心座標30aと画素座標36aと計測点32、および投影中心座標30bと投影座標36bと計測点32とがそれぞれ一直線上にあることから導出される条件式である次式(1)により求められる。これにより、3次元計測装置1は、計測対象面の表面形状の3次元計測が可能となる。
【0029】
式(1)において、fは焦点距離、a11からa33は3軸周りの回転量を用いた回転変換である。
【数1】

【0030】
3次元形状計測統合演算処理部24は、3次元形状演算処理部23で取得される複数の3次元形状計測結果を統合し計測対象の3次元形状を演算する。
【0031】
次に、本実施形態における3次元計測装置1の動作について説明する。
【0032】
3次元計測装置1は、揺動する状況下において計測対象の3次元形状を計測する場合、3次元計測装置1が仮想的に1回もしくは1箇所(計測原点)で計測したものと同等のデータを取得する必要がある。以下、3次元計測装置1が仮想的に1回もしくは1箇所(計測原点)で計測したものと同等のデータを取得するための処理を、フローチャートを用いて説明する。
【0033】
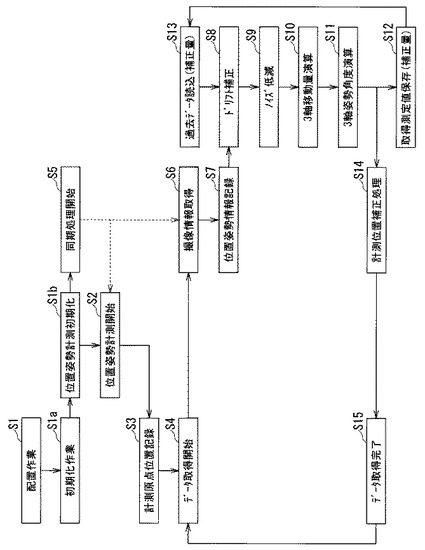
図3は、3次元形状計測部11の位置姿勢情報に対して行われる計測情報取得処理を説明するフローチャートである。
【0034】
ステップS1において、3次元形状計測部11は、任意の計測対象空間に配置される。
【0035】
ステップS1aにおいて、撮像装置12、投影装置13および位置姿勢計測部14は、所要の機械的な初期化を行う。ステップS1bにおいて、位置姿勢計測部14は、計測対象となる3軸の加速度、姿勢角度(位置姿勢情報)、時間、およびこれら計測値の演算結果である3軸の移動量と姿勢角度と時間とを初期化する。
【0036】
ステップS2において、位置姿勢計測部14は、初期化時点(初期化ステップS1b)を0として位置姿勢情報の計測を開始する。ステップS3において、位置姿勢計測部14は、計測原点の位置姿勢情報を取得し、位置姿勢情報は計測装置位置姿勢記録部18に記録される。また、位置姿勢計測部14は、初期化時点を計測の基準時刻として記録する。
【0037】
計測原点は、3次元形状計測部11の撮像装置12の投影中心、光軸原点、投影装置13の投影中心、または位置姿勢計測部14の計測基準となる位置のうち、いずれかが選択される。本実施形態においては、撮像装置12の投影中心を計測原点とする。その他の位置が計測原点となる場合、計測原点との位置関係が既知であれば撮像装置の投影中心を計測原点とした場合と同様の結果が得られる。
【0038】
ステップS4において、撮像装置12は撮像情報の取得を開始する。また、位置姿勢計測部14は、位置姿勢情報の取得を開始する。
【0039】
ステップS5において、計測時間同期処理部15は、トリガ信号を発生し、撮像装置12、投影装置13および位置姿勢計測部14に供給する。トリガ信号は、位置姿勢計測部14による位置姿勢情報の取得と、撮像装置12による撮像情報の取得のタイミングを同期させる。
【0040】
ステップS6において、3次元形状計測部11は、撮像装置12より画像データおよび撮像時の焦点距離や絞りなどの撮像情報を取得する。取得された撮像情報は、計測データ入力部21に入力され、対応付演算処理部22に転送される。
【0041】
ステップS7において、計測装置位置姿勢記録部18は、初期化時点以降、位置姿勢計測部14より出力された位置姿勢情報を記録する。位置姿勢計測部14は、撮像情報および位置姿勢情報の取得時刻を出力する。位置姿勢補正処理部17は、位置姿勢計測データ入力部16を介してその時刻を取得する。
【0042】
ステップS8において、位置姿勢計測部14(ドリフト補正部)は、得られた3軸方向の加速度および姿勢角度(位置姿勢情報)に対してドリフトノイズの補正を行う。
【0043】
ここで、位置姿勢計測部14には、一般的にドリフト誤差と呼ばれる、静止した状態での計測誤差が発生する場合がある。位置姿勢補正処理部17は、初期化後、3次元形状計測部11を一定時間静止状態とすることにより、ドリフト誤差を含む補正用の位置姿勢情報を取得する。位置姿勢補正処理部17は、このドリフト誤差を含む位置姿勢情報に基づいて、ドリフト誤差の統計量(最小値、最大値、平均値および分散値)を求める。
【0044】
具体的には、位置姿勢補正処理部17は、ドリフト誤差を低減するため、各位置姿勢情報の計測値の分散値から標準偏差を求める。位置姿勢補正処理部17は、標準偏差を超える計測値をドリフト補正の対象とする。位置姿勢補正処理部17は、位置姿勢計測部14の計測値が安定するまで位置姿勢情報の取得を繰り返し、最終的な標準偏差が求まるまで計測値のドリフト補正を行う。
【0045】
位置姿勢補正処理部17は、ドリフト誤差を含んだ計測値から求まる標準偏差をドリフト誤差閾値として設定する。位置姿勢補正処理部17は、このドリフト誤差閾値を超える計測値に対して、標準偏差を差し引くことで補正を実施する。
【0046】
ステップS9において、位置姿勢補正処理部17は、位置姿勢計測部14に累積する計測誤差を補正する(位置姿勢情報の計測値に影響するノイズを低減する)。
【0047】
計測された計測値には計測誤差が含まれるため、時間経過と共に計測誤差が累積する。一般的に、3次元形状計測部11の全体的な位置が分かる場合には、一定時間ごとに計測値をリセットすることで累積誤差の補正などが実施される。しかし、水中や気中などの計測環境においては、3次元形状計測部11の絶対的な位置を計測する方法や手段がない。
【0048】
そこで、位置姿勢補正処理部17は、計測誤差を逐次補正する。位置姿勢補正処理部17は、計測装置位置姿勢記録部18に記録された位置姿勢情報の計測値から選択される任意に設定された時間内の計測値に基づいて、任意に設定された計測値の分解能ごとのヒストグラムを作成する。位置姿勢補正処理部17は、各時間毎に作成されたヒストグラムに対し、順次単峰性および多峰性の有無を判断し、誤差の補正方法を決定する。
【0049】
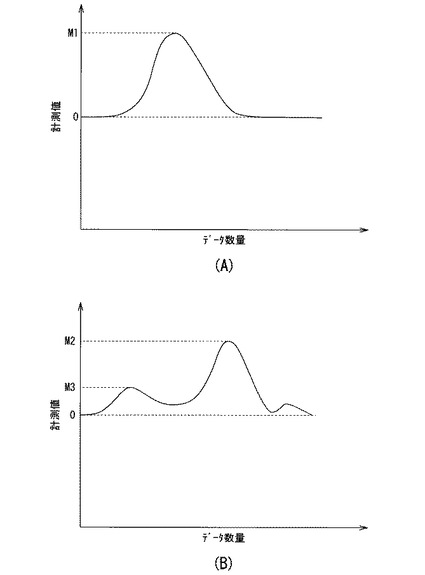
図4は、計測値の計測誤差を補正する際に作成される一例としての概念的なヒストグラムであり、(A)は単峰性、(B)は多峰性を有するヒストグラムである。
【0050】
単峰性の判別を行う場合、位置姿勢補正処理部17は、ヒストグラムを平滑化し、計測値の最大値(図4(A)のM1)およびこの最大値の両隣に存在する計測値の最小値を検出する。位置姿勢補正処理部17は、これら最小値に挟まれる区間の計測値を合計し、計測値全体の合計値(ヒストグラム全体の面積)との面積比を演算する。
【0051】
演算により求められる面積比が、予め設定された単峰性のヒストグラムから求まる閾値以上となる場合、ヒストグラムは単峰性を有すると判断される。
【0052】
多峰性の判別を行う場合、位置姿勢補正処理部17は、計測値の最大値(図4(B)のM2)の両隣に存在する計測値の最小値の区間を越えたヒストグラムのデータに対し、計測値の第2位の最大値(図4(A)のM3)を検出する。単峰性の判別において用いられる面積比が上述した閾値より小さく、かつ第2の最大値が検出された場合、ヒストグラムは多峰性を有すると判断される。
【0053】
位置姿勢補正処理部17は単峰性を有すると判断した場合、位置姿勢計測部14の計測値は誤差を多く含むと判定する。位置姿勢補正処理部17は、任意に設定した時間内の計測値を処理対象外とし、処理対象外とする計測値の前後の時間の計測値を用いて、平滑化することで補正する。
【0054】
位置姿勢補正処理部17は多峰性を有すると判断した場合、それぞれの最大値となった計測値に対して、任意に設定された加速度の計測値区間に該当する計測値を処理対象外とする。位置姿勢補正処理部17は、単峰性の場合と同様に、処理対象外とする計測値の前後の時間の計測値を用いて、平滑化することで補正する。
【0055】
このとき、計測誤差を含む計測値とみなされる最大値については、計測値の中から抽出される。一方、最大値「付近」の計測誤差を含む計測値は処理の対象とされるため、計測誤差の累積は補正が十分になされたとはいえない。
【0056】
そこで、位置姿勢補正処理部17は、累積する計測誤差を低減させるため、以下の処理を実施する。すなわち、位置姿勢補正処理部17は、初期化開始時点からの最大値として抽出された計測値を集約し、集約された計測値の分散値を求める。分散値を求めるためには平均値が必要とされるが、位置姿勢補正処理部17は、単峰性または多峰性の判断後に処理の対象外となり平滑化された補正計測値を用いて平均値を求める。
【0057】
位置姿勢補正処理部17は、求められた計測値の分散値を用いて、補正に用いられる補正閾値tを次式(2)に基づいて求める。次式(2)において、tは計測値の補正閾値、σは上記で求めた計測値の分散値、nは任意に設定した計測時間内の計測値のデータ数である。
【数2】
【0058】
位置姿勢補正処理部17は、式(2)で求められた計測値の補正閾値tを用い、計測値に対して閾値処理を実施する。位置姿勢補正処理部17は、計測値が補正閾値t以上の場合には、任意に設定した計測時間のデータに基づいて平滑化を行う、または中央値を求めることで補正する。
【0059】
ステップS10において、位置姿勢補正処理部17は、補正された3軸方向の加速度の計測値を任意の時間で積分し、3次元形状計測部11が任意の時間に移動した速度を取得する。位置姿勢補正処理部17は、得られた速度を同様の任意の時間で積分することで、3次元形状計測部11の移動量を取得する。
【0060】
ステップS11において、位置姿勢補正処理部17は、移動量取得ステップS10と同様に、補正された3軸周りの姿勢角度に基づいて、姿勢角度の変化量を取得する。
【0061】
ステップS12において、位置姿勢補正処理部17は、取得された測定値(補正量)を計測装置位置姿勢記録部18に格納する。ステップS13において、計測装置位置姿勢記録部18に格納された計測値は、過去データとして所要のタイミングで読み出される。
【0062】
ステップS14において、初回に撮像を実施した3次元形状計測部11の撮像装置12の投影中心を計測原点とし、補正処理が行われた各計測値を初回(前回)の計測位置に加算・減算することで2回目以降の計測位置を補正する。
【0063】
ステップS15において、取得された位置姿勢情報に対して記録ステップS7〜位置補正ステップS14が完了すると、再度データ取得開始ステップS4に戻り以降の処理が順次実施される。
【0064】
以上の計測情報取得処理において取得された3次元形状計測部11の位置姿勢情報に基づいて、計測対象の3次元形状データが取得される。
【0065】
撮像情報取得ステップS6において取得された撮像情報に基づいて、対応付演算処理部22は画像データと投影装置13により投影される投影模様とを画像上で対応付ける。3次元形状演算処理部23は、対応付演算処理部22における処理結果に基づいて計測対象の3次元形状を取得する。
【0066】
3次元形状計測統合演算処理部24は、3次元形状演算処理部23より計測対象の3次元形状データを取得する。3次元形状計測統合演算処理部24は、位置姿勢補正処理部17より3次元形状計測部11の位置姿勢情報を取得する。
【0067】
3次元形状計測統合演算処理部24は、これらの情報に基づいて、初回以降に計測された3次元形状データを、初回計測時の計測位置に平行移動および回転し、座標値を統合する。3次元形状計測統合演算処理部24は、位置姿勢補正処理部17により補正された計測位置と計測原点の双方の位置と姿勢角度から差分値を求めることで計測位置の平行移動量と回転量とを決定する。
【0068】
この3次元計測装置1およびその方法によれば、3次元形状計測部11が水中や気中において遥動する環境下に配置される場合であっても、計測環境の制約を低減し、計測作業および3次元形状取得の効率化を図ることができる。
【0069】
すなわち、3次元計測装置1およびその方法は、3次元形状計測部11の3軸方向の移動量と向き、および3軸回りの回転量と向きを検出する位置姿勢計測部14を備えることにより、計測中の移動と回転を取得し、計測位置を補正することができる。また、3次元計測装置1およびその方法は、位置姿勢情報の計測値に基づいてドリフトノイズや累積計測誤差を低減・補正することができ、仮想的に1回もしくは1箇所で計測する方法と同等の3次元形状計測を可能とする。
【0070】
また、揺動する環境下においても3次元形状データを取得することができるため、3次元形状計測部11を固定するための構造が不要になる点においても、本実施形態における3次元計測装置1およびその方法は有効である。
【0071】
なお、3次元形状計測部11は、撮像装置2台と投影装置1台を備え、ステレオ視法の原理に基づいて面的な形状計測を行ってもよい。
【0072】
図5は、本実施形態における3次元計測装置の変形例を示すブロック構成図である。
【0073】
変形例としての3次元計測装置41と図1の3次元計測装置1とは、3次元形状計測部の構成が異なる。3次元計測装置41における図1の3次元計測装置1と対応する構成および部分については同一の符号を付し、重複する説明を省略する。
【0074】
3次元形状計測部51は、撮像装置12a、12bと投影装置13と位置姿勢計測部14とを有する。すなわち、3次元形状計測部51は、撮像装置を2台有する。
【0075】
図6は、本実施形態の変形例における3次元形状計測部51で得られるデータより3次元形状演算処理部23が計測対象の3次元形状(3次元座標)を求める説明図である。
【0076】
計測対象空間の座標系において、計測対象(計測点)は、撮像装置12a、12bの投影中心座標30a(X0a,Y0a,Z0a)および30c(X0c,Y0c,Z0c)で撮像される。また、計測対象は、投影装置13の投影中心座標30b(X0b,Y0b,Z0b)で投影される。
【0077】
計測対象空間上の計測点32(X,Y,Z)はそれぞれの撮像面35a、35cおよび投影面35b上において、対応する画素座標36a、36c、投影座標36b(x(a,b,c)、y(a,b,c))として写像される。
【0078】
計測点の3次元座標は、計測点の投影中心座標30a、30cと画素座標36a、36cと計測点32、および投影中心座標30bと投影座標36bと計測点32とがそれぞれ一直線上にあることから導出される条件式で上述した式(1)により求められる。これにより、3次元計測装置41は、計測対象面の表面形状の3次元計測が可能となる。
【0079】
計測時間同期処理部15は、撮像装置12a、12b、投影装置13および位置姿勢計測部14が撮像情報や位置姿勢情報を取得する際の時間同期を取るために、トリガ信号を発生する。
【0080】
なお、投影装置がない場合においても撮像装置が2台あることによりステレオ視法の原理は成り立つため、3次元計測が可能である。
【0081】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0082】
1、41 3次元計測装置
11、51 3次元形状計測部
12、12a、12b 撮像装置
13 投影装置
14 位置姿勢計測部
15 計測時間同期処理部
16 位置姿勢計測データ入力部
17 位置姿勢補正処理部
18 計測装置位置姿勢記録部
21 計測データ入力部
22 対応付演算処理部
23 3次元形状演算処理部
24 3次元形状計測統合演算処理部
30a、30b、30c 投影中心座標
32 計測点
35a、35c 撮像面
35b 投影面
36a、36c 画素座標
36b 投影座標
【技術分野】
【0001】
本発明は、3次元計測装置およびその方法に関する。
【背景技術】
【0002】
国内外の原子力発電プラントは高経年化が進み、炉内構造物や機器の保守・補修の機会が増加すると考えられる。炉内補修工事等は、補修対象物の形状寸法や補修対象箇所までのアクセスルートの形状寸法等の寸法情報を必要とする。これらの寸法情報は、設計図面情報に依存するだけでなく、アズビルト情報が重要である。さらに、保守・補修を行う企業とは異なる企業により設計されたプラントや、海外のプラントの設計図面情報は、十分に入手できない可能性がある。
【0003】
従来、3次元形状計測の技術には、可視光方式、光学投影方式、レーザ方式などがある。可視光方式は、カメラ2台によるステレオ視等の方式である。光学投影方式は、カメラ1台とレーザ光等の投影光による方式である。レーザ方式は、レーザ等の波長の飛行時間計測等による方式である。
【0004】
可視光方式は、カメラにより瞬間的に面データが取得可能である。しかし、光学投影方式やレーザ方式は、点もしくは線データを取得するため、静止した計測対象の計測中に計測装置を動かすことは困難となるという課題がある。可視光方式は、光学系の被写界深度の関係から、計測位置を極力固定することが望ましい等、計測環境の制約が発生する課題がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平7−218251号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記の方式を適用する3次元計測装置は、計測装置が揺動する状況、例えば構造物に固定されず吊り下げられるような状況にいては、1回の計測が瞬間的に行われない限り面的な情報が取得できないという課題がある。
【0007】
また、点や線データを用いる計測方式の場合に面的な情報を得るためには、3次元計測装置は、仮想的に1回もしくは1箇所(計測原点)で計測したものと同等のデータを取得する必要がある。
【0008】
さらに、3次元計測装置は、揺動する環境下で装置の位置を計測するためには、3軸方向の移動量および姿勢角度を計測する必要がある。これらの計測値には、計測誤差が発生する。累積する計測誤差を低減または補正するため、3次元計測装置は計測空間内における絶対位置の計測が必要となる。しかし、水中や屋内、特に狭隘な空間での計測では絶対位置を計測する方法がなく、絶対位置を利用する方法以外の方法を用いた計測誤差を低減・補正する機能が必要である。
【0009】
本発明はこのような事情を考慮してなされたもので、計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置およびその方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に係る3次元計測装置は、上述した課題を解決するために、少なくとも計測対象面の画像を撮像する撮像装置を有し、前記撮像装置により撮像された画像データを含む撮像情報を取得する撮像部と、前記撮像情報に基づいて、前記計測対象の3次元座標を取得する3次元形状演算処理部と、前記撮像装置の加速度および姿勢角度を含む位置姿勢情報を前記撮像情報の取得と同期して取得する位置姿勢計測部と、前記位置姿勢情報に基づいて、前記計測原点に対する前記撮像装置の移動量および方向と姿勢角度の変化量および方向とを演算する位置姿勢補正処理部と、前記撮像情報と同期して取得された前記撮像装置の移動量および方向と姿勢角度の変化量および方向とに基づいて、前記3次元形状演算処理部により得られる前記3次元座標を平行移動および回転して複数の前記3次元座標を統合し、前記計測対象の3次元形状を取得する統合演算処理部とを備えたことを特徴とする。
【発明の効果】
【0011】
本発明に係る3次元計測装置およびその方法においては、計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる。
【図面の簡単な説明】
【0012】
【図1】本発明に係る3次元計測装置の一実施形態を示すブロック構成図。
【図2】撮像装置および投影装置で得られるデータより3次元形状演算処理部が計測対象の3次元形状(3次元座標)を求める説明図。
【図3】3次元形状計測部の位置姿勢情報に対して行われる計測情報取得処理を説明するフローチャート。
【図4】計測値の計測誤差を補正する際に作成される一例としての概念的なヒストグラムであり、(A)は単峰性、(B)は多峰性を有するヒストグラム。
【図5】本実施形態における3次元計測装置の変形例を示すブロック構成図。
【図6】本実施形態の変形例における3次元形状計測部で得られるデータより3次元形状演算処理部が計測対象の3次元形状(3次元座標)を求める説明図。
【発明を実施するための形態】
【0013】
本発明に係る3次元計測装置およびその方法の一実施形態を添付図面に基づいて説明する。
【0014】
図1は、本発明に係る3次元計測装置の一実施形態を示すブロック構成図である。
【0015】
3次元計測装置1は、気中や水中に存在する構造物であって、例えば原子力発電プラント内の炉内機器を計測対象とする。本実施形態における3次元計測装置およびその方法は、一例として光切断法を用いて3次元計測を行う。
【0016】
3次元形状計測部11は、撮像装置12と投影装置13と位置姿勢計測部14とを有する。3次元形状計測部11は、気中や水中に吊り下げられた状態で支持される。このため、3次元形状計測部11は、揺動する環境下で計測対象の撮像等を行う。
【0017】
撮像装置12は、計測対象の表面を撮像可能な位置に設置され、表面の形状を撮像する。投影装置13は、計測対象の表面にレーザ光などの光を投影可能な位置に設置され、表面に投影模様を投影する。位置姿勢計測部14は、撮像装置12および投影装置13の3軸方向の加速度および姿勢角度(位置姿勢情報)と、位置姿勢情報の取得時間とを計測するセンサである。
【0018】
3次元形状計測部11の撮像装置12の投影中心、投影装置13の投影中心、および位置姿勢計測部14の位置関係は、既知であるものとする。撮像装置12および投影装置13の投影中心は、キャリブレーションにより投影中心を求めるための補間式を事前に求め、演算により決定される。この補間式は、座標が既知であるテストターゲットを撮像した画像および投影画像から焦点距離との関係を求めることで決定される。
【0019】
計測時間同期処理部15は、撮像装置12、投影装置13および位置姿勢計測部14が撮像情報や位置姿勢情報を取得する際の時間同期を取るために、トリガ信号を発生する。
【0020】
位置姿勢計測データ入力部16は、位置姿勢計測部14により計測された撮像装置12および投影装置13の位置姿勢情報と位置姿勢情報の取得時間を入力する。
【0021】
位置姿勢補正処理部17は、撮像装置12および投影装置13の位置姿勢情報および取得時間を用いて、位置姿勢情報を補正する。位置姿勢補正処理部17は、補正された位置姿勢情報に基づいて撮像装置12および投影装置13の3軸方向の移動量および方向と姿勢角度変化量および方向を求める。計測装置位置姿勢記録部18は、位置姿勢補正処理部17の位置姿勢情報等を記録する。
【0022】
計測データ入力部21は、撮像装置12の焦点距離等の機器情報、および撮像装置12により撮像された画像データである撮像情報を入力する。
【0023】
対応付演算処理部22は、撮像装置12により撮像される画像データと投影装置13により投影される投影模様とを画像上で対応付ける。
【0024】
3次元形状演算処理部23は、対応付演算処理部22における処理結果に基づいて計測対象の3次元形状(3次元座標)を取得する。
【0025】
図2は、撮像装置12および投影装置13で得られるデータより3次元形状演算処理部23が計測対象の3次元形状(3次元座標)を求める説明図である。
【0026】
計測対象空間の座標系において、計測対象(計測点)は、撮像装置12の投影中心座標30a(X0a,Y0a,Z0a)で撮像される。また、計測対象は、投影装置13の投影中心座標30b(X0b,Y0b,Z0b)で投影される。
【0027】
計測対象空間上の計測点32(X,Y,Z)は、それぞれの撮像面35aおよび投影面35b上において、対応する画素座標36a(xa、ya)、投影座標36b(xb、ya)として写像される。
【0028】
計測点の3次元座標は、計測点の投影中心座標30aと画素座標36aと計測点32、および投影中心座標30bと投影座標36bと計測点32とがそれぞれ一直線上にあることから導出される条件式である次式(1)により求められる。これにより、3次元計測装置1は、計測対象面の表面形状の3次元計測が可能となる。
【0029】
式(1)において、fは焦点距離、a11からa33は3軸周りの回転量を用いた回転変換である。
【数1】
【0030】
3次元形状計測統合演算処理部24は、3次元形状演算処理部23で取得される複数の3次元形状計測結果を統合し計測対象の3次元形状を演算する。
【0031】
次に、本実施形態における3次元計測装置1の動作について説明する。
【0032】
3次元計測装置1は、揺動する状況下において計測対象の3次元形状を計測する場合、3次元計測装置1が仮想的に1回もしくは1箇所(計測原点)で計測したものと同等のデータを取得する必要がある。以下、3次元計測装置1が仮想的に1回もしくは1箇所(計測原点)で計測したものと同等のデータを取得するための処理を、フローチャートを用いて説明する。
【0033】
図3は、3次元形状計測部11の位置姿勢情報に対して行われる計測情報取得処理を説明するフローチャートである。
【0034】
ステップS1において、3次元形状計測部11は、任意の計測対象空間に配置される。
【0035】
ステップS1aにおいて、撮像装置12、投影装置13および位置姿勢計測部14は、所要の機械的な初期化を行う。ステップS1bにおいて、位置姿勢計測部14は、計測対象となる3軸の加速度、姿勢角度(位置姿勢情報)、時間、およびこれら計測値の演算結果である3軸の移動量と姿勢角度と時間とを初期化する。
【0036】
ステップS2において、位置姿勢計測部14は、初期化時点(初期化ステップS1b)を0として位置姿勢情報の計測を開始する。ステップS3において、位置姿勢計測部14は、計測原点の位置姿勢情報を取得し、位置姿勢情報は計測装置位置姿勢記録部18に記録される。また、位置姿勢計測部14は、初期化時点を計測の基準時刻として記録する。
【0037】
計測原点は、3次元形状計測部11の撮像装置12の投影中心、光軸原点、投影装置13の投影中心、または位置姿勢計測部14の計測基準となる位置のうち、いずれかが選択される。本実施形態においては、撮像装置12の投影中心を計測原点とする。その他の位置が計測原点となる場合、計測原点との位置関係が既知であれば撮像装置の投影中心を計測原点とした場合と同様の結果が得られる。
【0038】
ステップS4において、撮像装置12は撮像情報の取得を開始する。また、位置姿勢計測部14は、位置姿勢情報の取得を開始する。
【0039】
ステップS5において、計測時間同期処理部15は、トリガ信号を発生し、撮像装置12、投影装置13および位置姿勢計測部14に供給する。トリガ信号は、位置姿勢計測部14による位置姿勢情報の取得と、撮像装置12による撮像情報の取得のタイミングを同期させる。
【0040】
ステップS6において、3次元形状計測部11は、撮像装置12より画像データおよび撮像時の焦点距離や絞りなどの撮像情報を取得する。取得された撮像情報は、計測データ入力部21に入力され、対応付演算処理部22に転送される。
【0041】
ステップS7において、計測装置位置姿勢記録部18は、初期化時点以降、位置姿勢計測部14より出力された位置姿勢情報を記録する。位置姿勢計測部14は、撮像情報および位置姿勢情報の取得時刻を出力する。位置姿勢補正処理部17は、位置姿勢計測データ入力部16を介してその時刻を取得する。
【0042】
ステップS8において、位置姿勢計測部14(ドリフト補正部)は、得られた3軸方向の加速度および姿勢角度(位置姿勢情報)に対してドリフトノイズの補正を行う。
【0043】
ここで、位置姿勢計測部14には、一般的にドリフト誤差と呼ばれる、静止した状態での計測誤差が発生する場合がある。位置姿勢補正処理部17は、初期化後、3次元形状計測部11を一定時間静止状態とすることにより、ドリフト誤差を含む補正用の位置姿勢情報を取得する。位置姿勢補正処理部17は、このドリフト誤差を含む位置姿勢情報に基づいて、ドリフト誤差の統計量(最小値、最大値、平均値および分散値)を求める。
【0044】
具体的には、位置姿勢補正処理部17は、ドリフト誤差を低減するため、各位置姿勢情報の計測値の分散値から標準偏差を求める。位置姿勢補正処理部17は、標準偏差を超える計測値をドリフト補正の対象とする。位置姿勢補正処理部17は、位置姿勢計測部14の計測値が安定するまで位置姿勢情報の取得を繰り返し、最終的な標準偏差が求まるまで計測値のドリフト補正を行う。
【0045】
位置姿勢補正処理部17は、ドリフト誤差を含んだ計測値から求まる標準偏差をドリフト誤差閾値として設定する。位置姿勢補正処理部17は、このドリフト誤差閾値を超える計測値に対して、標準偏差を差し引くことで補正を実施する。
【0046】
ステップS9において、位置姿勢補正処理部17は、位置姿勢計測部14に累積する計測誤差を補正する(位置姿勢情報の計測値に影響するノイズを低減する)。
【0047】
計測された計測値には計測誤差が含まれるため、時間経過と共に計測誤差が累積する。一般的に、3次元形状計測部11の全体的な位置が分かる場合には、一定時間ごとに計測値をリセットすることで累積誤差の補正などが実施される。しかし、水中や気中などの計測環境においては、3次元形状計測部11の絶対的な位置を計測する方法や手段がない。
【0048】
そこで、位置姿勢補正処理部17は、計測誤差を逐次補正する。位置姿勢補正処理部17は、計測装置位置姿勢記録部18に記録された位置姿勢情報の計測値から選択される任意に設定された時間内の計測値に基づいて、任意に設定された計測値の分解能ごとのヒストグラムを作成する。位置姿勢補正処理部17は、各時間毎に作成されたヒストグラムに対し、順次単峰性および多峰性の有無を判断し、誤差の補正方法を決定する。
【0049】
図4は、計測値の計測誤差を補正する際に作成される一例としての概念的なヒストグラムであり、(A)は単峰性、(B)は多峰性を有するヒストグラムである。
【0050】
単峰性の判別を行う場合、位置姿勢補正処理部17は、ヒストグラムを平滑化し、計測値の最大値(図4(A)のM1)およびこの最大値の両隣に存在する計測値の最小値を検出する。位置姿勢補正処理部17は、これら最小値に挟まれる区間の計測値を合計し、計測値全体の合計値(ヒストグラム全体の面積)との面積比を演算する。
【0051】
演算により求められる面積比が、予め設定された単峰性のヒストグラムから求まる閾値以上となる場合、ヒストグラムは単峰性を有すると判断される。
【0052】
多峰性の判別を行う場合、位置姿勢補正処理部17は、計測値の最大値(図4(B)のM2)の両隣に存在する計測値の最小値の区間を越えたヒストグラムのデータに対し、計測値の第2位の最大値(図4(A)のM3)を検出する。単峰性の判別において用いられる面積比が上述した閾値より小さく、かつ第2の最大値が検出された場合、ヒストグラムは多峰性を有すると判断される。
【0053】
位置姿勢補正処理部17は単峰性を有すると判断した場合、位置姿勢計測部14の計測値は誤差を多く含むと判定する。位置姿勢補正処理部17は、任意に設定した時間内の計測値を処理対象外とし、処理対象外とする計測値の前後の時間の計測値を用いて、平滑化することで補正する。
【0054】
位置姿勢補正処理部17は多峰性を有すると判断した場合、それぞれの最大値となった計測値に対して、任意に設定された加速度の計測値区間に該当する計測値を処理対象外とする。位置姿勢補正処理部17は、単峰性の場合と同様に、処理対象外とする計測値の前後の時間の計測値を用いて、平滑化することで補正する。
【0055】
このとき、計測誤差を含む計測値とみなされる最大値については、計測値の中から抽出される。一方、最大値「付近」の計測誤差を含む計測値は処理の対象とされるため、計測誤差の累積は補正が十分になされたとはいえない。
【0056】
そこで、位置姿勢補正処理部17は、累積する計測誤差を低減させるため、以下の処理を実施する。すなわち、位置姿勢補正処理部17は、初期化開始時点からの最大値として抽出された計測値を集約し、集約された計測値の分散値を求める。分散値を求めるためには平均値が必要とされるが、位置姿勢補正処理部17は、単峰性または多峰性の判断後に処理の対象外となり平滑化された補正計測値を用いて平均値を求める。
【0057】
位置姿勢補正処理部17は、求められた計測値の分散値を用いて、補正に用いられる補正閾値tを次式(2)に基づいて求める。次式(2)において、tは計測値の補正閾値、σは上記で求めた計測値の分散値、nは任意に設定した計測時間内の計測値のデータ数である。
【数2】
【0058】
位置姿勢補正処理部17は、式(2)で求められた計測値の補正閾値tを用い、計測値に対して閾値処理を実施する。位置姿勢補正処理部17は、計測値が補正閾値t以上の場合には、任意に設定した計測時間のデータに基づいて平滑化を行う、または中央値を求めることで補正する。
【0059】
ステップS10において、位置姿勢補正処理部17は、補正された3軸方向の加速度の計測値を任意の時間で積分し、3次元形状計測部11が任意の時間に移動した速度を取得する。位置姿勢補正処理部17は、得られた速度を同様の任意の時間で積分することで、3次元形状計測部11の移動量を取得する。
【0060】
ステップS11において、位置姿勢補正処理部17は、移動量取得ステップS10と同様に、補正された3軸周りの姿勢角度に基づいて、姿勢角度の変化量を取得する。
【0061】
ステップS12において、位置姿勢補正処理部17は、取得された測定値(補正量)を計測装置位置姿勢記録部18に格納する。ステップS13において、計測装置位置姿勢記録部18に格納された計測値は、過去データとして所要のタイミングで読み出される。
【0062】
ステップS14において、初回に撮像を実施した3次元形状計測部11の撮像装置12の投影中心を計測原点とし、補正処理が行われた各計測値を初回(前回)の計測位置に加算・減算することで2回目以降の計測位置を補正する。
【0063】
ステップS15において、取得された位置姿勢情報に対して記録ステップS7〜位置補正ステップS14が完了すると、再度データ取得開始ステップS4に戻り以降の処理が順次実施される。
【0064】
以上の計測情報取得処理において取得された3次元形状計測部11の位置姿勢情報に基づいて、計測対象の3次元形状データが取得される。
【0065】
撮像情報取得ステップS6において取得された撮像情報に基づいて、対応付演算処理部22は画像データと投影装置13により投影される投影模様とを画像上で対応付ける。3次元形状演算処理部23は、対応付演算処理部22における処理結果に基づいて計測対象の3次元形状を取得する。
【0066】
3次元形状計測統合演算処理部24は、3次元形状演算処理部23より計測対象の3次元形状データを取得する。3次元形状計測統合演算処理部24は、位置姿勢補正処理部17より3次元形状計測部11の位置姿勢情報を取得する。
【0067】
3次元形状計測統合演算処理部24は、これらの情報に基づいて、初回以降に計測された3次元形状データを、初回計測時の計測位置に平行移動および回転し、座標値を統合する。3次元形状計測統合演算処理部24は、位置姿勢補正処理部17により補正された計測位置と計測原点の双方の位置と姿勢角度から差分値を求めることで計測位置の平行移動量と回転量とを決定する。
【0068】
この3次元計測装置1およびその方法によれば、3次元形状計測部11が水中や気中において遥動する環境下に配置される場合であっても、計測環境の制約を低減し、計測作業および3次元形状取得の効率化を図ることができる。
【0069】
すなわち、3次元計測装置1およびその方法は、3次元形状計測部11の3軸方向の移動量と向き、および3軸回りの回転量と向きを検出する位置姿勢計測部14を備えることにより、計測中の移動と回転を取得し、計測位置を補正することができる。また、3次元計測装置1およびその方法は、位置姿勢情報の計測値に基づいてドリフトノイズや累積計測誤差を低減・補正することができ、仮想的に1回もしくは1箇所で計測する方法と同等の3次元形状計測を可能とする。
【0070】
また、揺動する環境下においても3次元形状データを取得することができるため、3次元形状計測部11を固定するための構造が不要になる点においても、本実施形態における3次元計測装置1およびその方法は有効である。
【0071】
なお、3次元形状計測部11は、撮像装置2台と投影装置1台を備え、ステレオ視法の原理に基づいて面的な形状計測を行ってもよい。
【0072】
図5は、本実施形態における3次元計測装置の変形例を示すブロック構成図である。
【0073】
変形例としての3次元計測装置41と図1の3次元計測装置1とは、3次元形状計測部の構成が異なる。3次元計測装置41における図1の3次元計測装置1と対応する構成および部分については同一の符号を付し、重複する説明を省略する。
【0074】
3次元形状計測部51は、撮像装置12a、12bと投影装置13と位置姿勢計測部14とを有する。すなわち、3次元形状計測部51は、撮像装置を2台有する。
【0075】
図6は、本実施形態の変形例における3次元形状計測部51で得られるデータより3次元形状演算処理部23が計測対象の3次元形状(3次元座標)を求める説明図である。
【0076】
計測対象空間の座標系において、計測対象(計測点)は、撮像装置12a、12bの投影中心座標30a(X0a,Y0a,Z0a)および30c(X0c,Y0c,Z0c)で撮像される。また、計測対象は、投影装置13の投影中心座標30b(X0b,Y0b,Z0b)で投影される。
【0077】
計測対象空間上の計測点32(X,Y,Z)はそれぞれの撮像面35a、35cおよび投影面35b上において、対応する画素座標36a、36c、投影座標36b(x(a,b,c)、y(a,b,c))として写像される。
【0078】
計測点の3次元座標は、計測点の投影中心座標30a、30cと画素座標36a、36cと計測点32、および投影中心座標30bと投影座標36bと計測点32とがそれぞれ一直線上にあることから導出される条件式で上述した式(1)により求められる。これにより、3次元計測装置41は、計測対象面の表面形状の3次元計測が可能となる。
【0079】
計測時間同期処理部15は、撮像装置12a、12b、投影装置13および位置姿勢計測部14が撮像情報や位置姿勢情報を取得する際の時間同期を取るために、トリガ信号を発生する。
【0080】
なお、投影装置がない場合においても撮像装置が2台あることによりステレオ視法の原理は成り立つため、3次元計測が可能である。
【0081】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0082】
1、41 3次元計測装置
11、51 3次元形状計測部
12、12a、12b 撮像装置
13 投影装置
14 位置姿勢計測部
15 計測時間同期処理部
16 位置姿勢計測データ入力部
17 位置姿勢補正処理部
18 計測装置位置姿勢記録部
21 計測データ入力部
22 対応付演算処理部
23 3次元形状演算処理部
24 3次元形状計測統合演算処理部
30a、30b、30c 投影中心座標
32 計測点
35a、35c 撮像面
35b 投影面
36a、36c 画素座標
36b 投影座標
【特許請求の範囲】
【請求項1】
少なくとも計測対象面の画像を撮像する撮像装置を有し、前記撮像装置により撮像された画像データを含む撮像情報を取得する撮像部と、
前記撮像情報に基づいて、前記計測対象の3次元座標を取得する3次元形状演算処理部と、
前記撮像装置の加速度および姿勢角度を含む位置姿勢情報を前記撮像情報の取得と同期して取得する位置姿勢計測部と、
前記位置姿勢情報に基づいて、前記計測原点に対する前記撮像装置の移動量および方向と姿勢角度の変化量および方向とを演算する位置姿勢補正処理部と、
前記撮像情報と同期して取得された前記撮像装置の移動量および方向と姿勢角度の変化量および方向とに基づいて、前記3次元形状演算処理部により得られる前記3次元座標を平行移動および回転して複数の前記3次元座標を統合し、前記計測対象の3次元形状を取得する統合演算処理部とを備えたことを特徴とする3次元計測装置。
【請求項2】
前記位置姿勢計測部により取得される前記位置姿勢情報に基づいて、前記位置姿勢計測部固有のドリフトノイズまたは計測累積誤差を補正する補正処理部をさらに備えた請求項1記載の3次元計測装置。
【請求項3】
前記補正処理部は、前記位置姿勢計測部が静止状態において計測される前記位置姿勢情報の統計量に基づいて前記ドリフトノイズを補正する請求項2記載の3次元計測装置。
【請求項4】
前記補正処理部は、所定の時間内における複数の位置姿勢情報のヒストグラムを作成し、前記位置姿勢情報を平滑化することにより前記計測累積誤差を補正する請求項2記載の3次元計測装置。
【請求項5】
撮像装置および位置姿勢計測部が撮像情報および位置姿勢情報を取得する際の時間同期を取るためのトリガ信号を発生する同期処理部をさらに備えた請求項1または2記載の3次元計測装置。
【請求項6】
前記撮像部は、
計測対象を撮像する少なくとも1台の撮像装置と、
前記計測対象面に幾何学的な模様を投影する投影装置とを有する請求項1または2記載の3次元計測装置。
【請求項7】
少なくとも1台の撮像装置により計測対象面の画像を撮像し、撮像された画像データを含む撮像情報を取得する撮像ステップと、
前記撮像情報に基づいて、前記計測対象の3次元座標を取得する3次元形状演算ステップと、
前記撮像装置の加速度および姿勢角度を含む位置姿勢情報を前記撮像情報の取得と同期して取得する位置姿勢計測ステップと、
前記位置姿勢情報に基づいて、前記計測原点に対する前記撮像装置の移動量および方向と姿勢角度の変化量および方向とを演算する位置姿勢補正ステップと、
前記撮像情報と同期して取得された前記撮像装置の移動量および方向と姿勢角度の変化量および方向とに基づいて、前記3次元形状演算ステップで得られる前記3次元座標を平行移動および回転して複数の前記3次元座標を統合し、前記計測対象の3次元形状を取得する統合演算ステップとを備えることを特徴とする3次元計測方法。
【請求項1】
少なくとも計測対象面の画像を撮像する撮像装置を有し、前記撮像装置により撮像された画像データを含む撮像情報を取得する撮像部と、
前記撮像情報に基づいて、前記計測対象の3次元座標を取得する3次元形状演算処理部と、
前記撮像装置の加速度および姿勢角度を含む位置姿勢情報を前記撮像情報の取得と同期して取得する位置姿勢計測部と、
前記位置姿勢情報に基づいて、前記計測原点に対する前記撮像装置の移動量および方向と姿勢角度の変化量および方向とを演算する位置姿勢補正処理部と、
前記撮像情報と同期して取得された前記撮像装置の移動量および方向と姿勢角度の変化量および方向とに基づいて、前記3次元形状演算処理部により得られる前記3次元座標を平行移動および回転して複数の前記3次元座標を統合し、前記計測対象の3次元形状を取得する統合演算処理部とを備えたことを特徴とする3次元計測装置。
【請求項2】
前記位置姿勢計測部により取得される前記位置姿勢情報に基づいて、前記位置姿勢計測部固有のドリフトノイズまたは計測累積誤差を補正する補正処理部をさらに備えた請求項1記載の3次元計測装置。
【請求項3】
前記補正処理部は、前記位置姿勢計測部が静止状態において計測される前記位置姿勢情報の統計量に基づいて前記ドリフトノイズを補正する請求項2記載の3次元計測装置。
【請求項4】
前記補正処理部は、所定の時間内における複数の位置姿勢情報のヒストグラムを作成し、前記位置姿勢情報を平滑化することにより前記計測累積誤差を補正する請求項2記載の3次元計測装置。
【請求項5】
撮像装置および位置姿勢計測部が撮像情報および位置姿勢情報を取得する際の時間同期を取るためのトリガ信号を発生する同期処理部をさらに備えた請求項1または2記載の3次元計測装置。
【請求項6】
前記撮像部は、
計測対象を撮像する少なくとも1台の撮像装置と、
前記計測対象面に幾何学的な模様を投影する投影装置とを有する請求項1または2記載の3次元計測装置。
【請求項7】
少なくとも1台の撮像装置により計測対象面の画像を撮像し、撮像された画像データを含む撮像情報を取得する撮像ステップと、
前記撮像情報に基づいて、前記計測対象の3次元座標を取得する3次元形状演算ステップと、
前記撮像装置の加速度および姿勢角度を含む位置姿勢情報を前記撮像情報の取得と同期して取得する位置姿勢計測ステップと、
前記位置姿勢情報に基づいて、前記計測原点に対する前記撮像装置の移動量および方向と姿勢角度の変化量および方向とを演算する位置姿勢補正ステップと、
前記撮像情報と同期して取得された前記撮像装置の移動量および方向と姿勢角度の変化量および方向とに基づいて、前記3次元形状演算ステップで得られる前記3次元座標を平行移動および回転して複数の前記3次元座標を統合し、前記計測対象の3次元形状を取得する統合演算ステップとを備えることを特徴とする3次元計測方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−7722(P2013−7722A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2011−142121(P2011−142121)
【出願日】平成23年6月27日(2011.6.27)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成23年6月27日(2011.6.27)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]