
3次元計測装置およびそれに用いられる照明装置
【課題】被計測物を精度よく計測することができる3次元計測装置およびそれに用いられる照明装置を提供する。
【解決手段】3次元計測装置1は、被計測物8に円偏光を照射する照明手段2と、照明手段2を移動させる移動手段3とを備える。また、3次元計測装置1は、被計測物8の被照射面からの反射光を受けて上記被照射面を撮像する撮像手段4と、撮像手段4で撮像された撮像画像を用いて反射光の偏光状態を検出し、被計測物8の被照射面の向きを求める演算手段5とをさらに備える。照明手段2は、円偏光を被計測物8の一部に照射する。移動手段3は、被計測物8において被照射面の位置が変わるように照明手段2を移動させる。
【解決手段】3次元計測装置1は、被計測物8に円偏光を照射する照明手段2と、照明手段2を移動させる移動手段3とを備える。また、3次元計測装置1は、被計測物8の被照射面からの反射光を受けて上記被照射面を撮像する撮像手段4と、撮像手段4で撮像された撮像画像を用いて反射光の偏光状態を検出し、被計測物8の被照射面の向きを求める演算手段5とをさらに備える。照明手段2は、円偏光を被計測物8の一部に照射する。移動手段3は、被計測物8において被照射面の位置が変わるように照明手段2を移動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被計測物に円偏光を照射し、被計測物で反射した反射光または被計測物を透過した透過光の偏光状態を解析することにより、被計測物の形状を計測する3次元計測装置およびそれに用いられる照明装置に関する。
【背景技術】
【0002】
従来から、被計測物の形状を計測するために、被計測物に光を照射し、被計測物で反射された反射光または被計測物を透過した透過光の偏光状態を解析する技術が知られている(例えば特許文献1参照)。この種の技術は、エリプソメトリーと呼ばれている。以下では、被計測物に照射された後の光に関して反射光についてのみ記載するが、この反射光の用語は特に断りがなければ、被計測物を透過した透過光と読み替え可能である。
【0003】
被計測物で反射された反射光は、検光子を通して光センサで受光される。光センサは、受光強度に応じた出力が得られる構成であればよいが、被計測物を広範囲にわたって同時に計測する場合にはカメラのような撮像手段が用いられる。検光子は、光センサ(撮像手段)が被計測物を見込む光軸の回りに回転可能になっている。
【0004】
被計測物での反射光は偏光であるから、楕円偏光により一般化して扱うことができる。楕円偏光のパラメータは、規定した基準の角度に対する楕円の傾きを表わす角度ψと、楕円の長径aおよび短径bとの3個で表される。一方、検光子を通過した光の強度Iは、検光子の回転角度θの関数でもあるから、結局、強度Iは、4個のパラメータa,b,θ,ψを持つ関数fとして表わされる。すなわち、I=f(a,b,θ,ψ)になる。ここに、直線偏光はb=0の条件で表わされ、円偏光はa=bの条件で表わされる。また、関数fの形は既知である。なお、長径aと短径bとの絶対値は、被計測物に照射された光の強度によって変化するが、偏光状態を知るには長径aと短径bとの比(楕円率)がわかればよいから、長径aと短径bとの絶対値は変化してもよい、つまり、被計測物に照射する光の強度は考慮しなくてもよい。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】国際公開第2010/021148号
【発明の概要】
【発明が解決しようとする課題】
【0006】
このような3次元計測装置において、高精度な計測を実現するには、完全な円偏光を、被計測物の表面で正反射して撮像手段の方向へ反射するように照射する必要がある。このためには、被計測物へ円偏光を全方位から照射することが必要である。
【0007】
しかしながら、特許文献1に記載された従来の計測装置では、照明手段の発光面が、円偏光を面発光する複数の平面を組み合わせた多面体となっている。このため、照明手段が被計測物にすべての角度から円偏光を照射することができず、計測誤差の原因となるという問題があった。
【0008】
上記問題を解決する手法として、発光面が半球状に形成されて被計測物を覆うように配置された照明手段が考えられる。
【0009】
しかしながら、発光面を半球状に精度よく形成することは難しく、かえって計測精度を下げることになる。
【0010】
本発明は上記の点に鑑みて為された発明であり、本発明の目的は、被計測物を精度よく計測することができる3次元計測装置およびそれに用いられる照明装置を提供することにある。
【課題を解決するための手段】
【0011】
本発明の3次元計測装置は、被計測物に円偏光を照射する照明手段と、前記被計測物の被照射面からの反射光を受けて前記被照射面を撮像する撮像手段と、前記撮像手段で撮像された撮像画像を用いて前記反射光の偏光状態を検出し、前記被照射面の向きを求める演算手段と、前記照明手段を移動させる移動手段とを備え、前記照明手段は、前記円偏光を前記被計測物の一部に照射し、前記移動手段は、前記被計測物において前記被照射面の位置が変わるように前記照明手段を移動させることを特徴とする。
【0012】
この3次元計測装置において、前記移動手段は、前記撮像手段の光軸の回りに軸対称に前記照明手段を移動させることが好ましい。
【0013】
この3次元計測装置において、前記照明手段は、前記被計測物を包含する半球と前記光軸を含む平面との交線に沿った形状に形成された発光面を有することが好ましい。
【0014】
この3次元計測装置において、前記撮像手段は、前記光軸の回りで前記照明手段が移動する全周を複数に分割した照明範囲ごとに前記被照射面を撮像し、前記演算手段は、前記照明範囲ごとに前記撮像手段で撮像された前記撮像画像を用いて前記反射光の偏光状態を検出し、前記照明範囲ごとの前記偏光状態と当該照明範囲の方位とを用いて、前記被照射面の法線方向が前記光軸に対してなす角度を表わす傾斜角と、前記被照射面の法線を前記光軸と直交する平面に投影した直線の方向を表わす方位角とを求めることが好ましい。
【0015】
この3次元計測装置において、前記照明手段は、前記円偏光を平行光で前記被計測物に照射することが好ましい。
【0016】
この3次元計測装置において、前記移動手段は、前記撮像手段の光軸の回りに軸対称に前記照明手段を移動させる第1の機構と、前記被計測物を包含する半球において前記光軸を直径とする円周方向に前記照明手段を移動させる第2の機構とを含むことが好ましい。
【0017】
本発明の照明装置は、被計測物に円偏光を照射し、前記被計測物の被照射面で反射した反射光の偏光状態を検出して前記被照射面の向きを求める3次元計測装置に用いられる照明装置であって、前記円偏光を前記被計測物の一部に照射する照明手段と、前記被計測物において前記被照射面の位置が変わるように前記照明手段を移動させる移動手段とを備えることを特徴とする。
【発明の効果】
【0018】
本発明によれば、被計測物を精度よく計測することが可能になるという利点がある。
【図面の簡単な説明】
【0019】
【図1】実施形態1に係る3次元計測装置を示す概略構成図である。
【図2】同上に係る3次元計測装置の動作説明図である。
【図3】同上に係る3次元計測装置の原理説明図である。
【図4】実施形態2に係る3次元計測装置の動作説明図である。
【図5】被計測物の一例であって、(a)は斜視図、(b)は上面図、(c)は側面図である。
【図6】実施形態3に係る3次元計測装置の動作説明図である。
【図7】実施形態4に係る3次元計測装置の動作説明図である。
【発明を実施するための形態】
【0020】
(実施形態1)
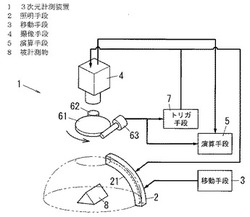
本実施形態に係る3次元計測装置1は、図1に示すように、円偏光を用いて被計測物8の表面状態を計測する装置である。すなわち、本実施形態の3次元計測装置1は、被計測物8に円偏光を照射し、被計測物8の表面(被照射面)で反射した反射光の偏光状態を検出して上記被照射面(反射面)の向きを求める。この3次元計測装置1は、被計測物8に円偏光を照射する照明手段2と、照明手段2を移動させる移動手段3と、被計測物8を撮像する撮像手段4と、撮像手段4で撮像された撮像画像を用いて被計測物8の被照射面の向きを求める演算手段5とを備えている。照明手段2から発せられた光は被計測物8の被照射面で反射した際に円偏光状態から楕円偏光状態に変化する。すなわち、被計測物8の被照射面で反射した反射光は楕円偏光状態である。また、3次元計測装置1は、被計測物8と撮像手段4との間に配置された検光子61と、検光子61の回転角度に応じてトリガ信号を出力するトリガ手段7とを備えている。照明手段2と移動手段3とで照明装置を構成する。被計測物8は、図示しないテーブル上に配置されており、テーブルの上方に撮像手段4が配置されている。すなわち、撮像手段4は、テーブル上面の法線方向と光軸41(図2参照)とが平行になるように配置されている。被計測物8は、撮像手段4が被計測物8を見込む光軸41上に配置されている。
【0021】
上記のような構成の3次元計測装置1は、被計測物8の微小領域に円偏光を照射する照明手段2を移動させることによって、被計測物8の全方位から完全な円偏光を照射することを実現する。以下、3次元計測装置1の各構成要素について説明する。
【0022】
照明手段2は、被計測物8に円偏光を照射する。例えば、照明手段2は、重ねて配置された偏光板(図示せず)と四分の一波長板(図示せず)とを備えており、偏光板を通して直線偏光になった光を四分の一波長板に通すことによって円偏光を生成し、上記円偏光を被計測物8に照射する。すなわち、照明手段2は、光源(図示せず)からの光を偏光板と四分の一波長板とに通すことによって円偏光を被計測物8に照射する。
【0023】
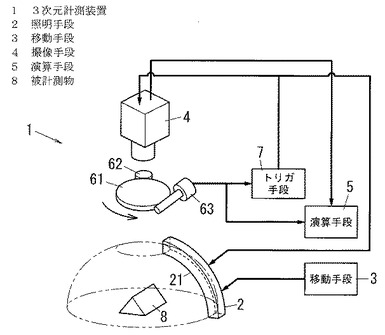
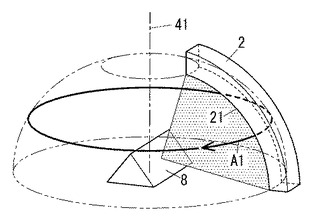
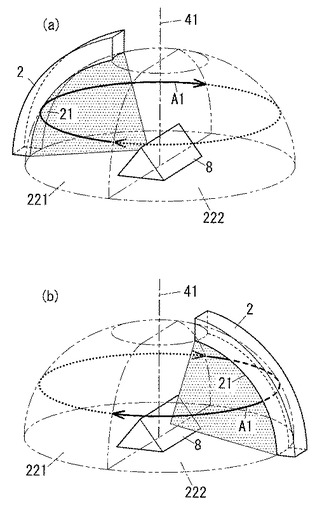
本実施形態の照明手段2は、図2に示すように、被計測物8を包含する半球と光軸41を含む平面との交線に沿った形状に形成された発光面21を有している。すなわち、照明手段2は、下面が半球の一部のように凹んだ発光面21を有している。照明手段2は、発光面21が撮像手段4の光軸41を囲むように配置されている。
【0024】
このような照明手段2は、円偏光を被計測物8の一部に照射し、移動手段3によって図2の矢印A1のように撮像手段4の光軸41の周囲の全周にわたって移動(走査)しながら、被計測物8に斜め上方および側方から円偏光を照射する。このとき、照明手段2は、撮像手段4の視野を遮らないように移動する。したがって、照明手段2は、撮像手段4の光軸41の周囲の全周を移動することによって、リング照明のように、被計測物8を全周にわたって均等に照明する。すなわち、照明手段2は、撮像手段4の光軸41の周囲を移動しながら、被計測物8に対して斜め上方および側方から円偏光を均等に照射する。
【0025】
なお、照明手段2は、被計測物8に円偏光を照射することが可能であれば、どのような構成でもよい。照明手段2に用いられる光源は、撮像手段4が撮像している間に光出力が変動することがないよう、直流安定化電源を用いて点灯させるものが好ましい。
【0026】
移動手段3は、例えばCPU(Central Processing Unit:中央処理装置)を主構成要素とし、図2の矢印A1のように照明手段2を移動させる。すなわち、移動手段3は、被計測物8において被照射面の位置が変わるように照明手段2を移動させる。
【0027】
本実施形態では、移動手段3は、撮像手段4の光軸41の回りに軸対称に照明手段2を移動させる。すなわち、移動手段3は、検光子61(図1参照)の所定の回転角度(後述)ごとに、照明手段2を被計測物8の周囲に1周ずつ回転させる。なお、移動手段3は、用途に応じて、照明手段2の移動量を1回転未満としてもよい。
【0028】
図1に示す撮像手段4は、被計測物8の被照射面からの反射光を受けて上記被照射面を撮像する。撮像手段4は、CCD(Charge Coupled Device)イメージセンサやCMOS(ComplementaryMetal Oxide Semiconductor)イメージセンサのように2次元格子の格子点上に画素が配列された撮像素子を備えている。被計測物8の被照射面からの反射光は楕円偏光であり、撮像手段4は検光子61を通して反射光を受ける。また、撮像手段4は受光光学系を備えており、被計測物8の被照射面からの反射光(楕円偏光)は受光光学系を通して撮像素子に入射される。本実施形態の撮像手段4は、検光子61の所定の回転角度(後述)ごとに、照明手段2の移動開始(回転開始)から移動終了(回転終了)までの間、露光を継続して被計測物8を撮像する。
【0029】
撮像手段4は、検光子61の所定の回転角度ごとに、被計測物8を撮像した後、画素値を濃淡値とする撮像画像を生成する。例えば、撮像手段4は、検光子61の回転角度が10°変わるごとに被計測物8を撮像する場合、全部で18枚の撮像画像を生成する。撮像手段4の各画素の画素値には、被計測物8の表面の場所ごとの反射光の強度が反映される。言い換えると、撮像手段4の画素ごとの画素値は、被計測物8の場所ごとの反射光の偏光状態を反映していることになる。撮像手段4から出力される画素ごとの画素値は演算手段5に入力される。
【0030】
なお、撮像手段4は、検光子61の所定の回転角度において、露光を継続して被計測物8を撮像するのではなく、照明手段2の位置ごとに被計測物8を撮像してもよい。この場合、撮像手段4は、照明手段2の位置ごとに撮像して生成した複数の撮像画像を用いて、画素ごとに画素値を積算した1枚の撮像画像(合成画像)を生成する。すなわち、撮像手段4は、照明手段2の位置ごとの撮像画像を合成して1枚の撮像画像を生成する。
【0031】
演算手段5は、例えばCPU(Central Processing Unit:中央処理装置)を主構成要素とし、検光子61の所定の回転角度ごとに撮像手段4で撮像された撮像画像を用いて反射光の偏光状態を検出する。すなわち、演算手段5は、撮像画像の画素ごとの画素値と検光子61の所定の回転角度との関係を用いて、反射光の偏光状態、つまり、被計測物8の表面に関して画素に対応する部位の偏光状態を解析する(背景技術を参照)。要するに、偏光状態を決めるパラメータを、被計測物8の部位ごとに求める。
【0032】
偏光状態を決めるパラメータを求めるには、後述するように、検光子61が互いに独立した3つの回転角度であるときに、それぞれの回転角度において受光する光の強度を求める必要がある。このことから、撮像手段4による撮像のタイミングを検光子61の回転角度と対応付けることが必要である。そのため、撮像手段4が被計測物8からの反射光を取り込むタイミングを指示するトリガ信号をトリガ手段7によって発生させている。
【0033】
反射光の偏光状態を検出した演算手段5は、被計測物8の被照射面からの反射光の偏光状態から上記被照射面の向きを求める。被計測物8の被照射面の向きとは、被照射面の法線方向が撮像手段4の光軸41に対してなす角度を表わす傾斜角、および、被照射面の法線を光軸41と直交する平面に投影した直線の方向を表わす方位角である。
【0034】
検光子61は、例えば直線偏光板などであり、撮像手段4と被計測物8との間において、撮像手段4の光軸41(図2参照)と平行な回転中心の回りで回転するように配置されており、回転手段62により回転駆動される。回転手段62は、モータを備えている。また、検光子61は、規定した基準の角度に対する回転角度が角度センサ63により計測される。角度センサ63は、検光子61の回転角度を検出するロータリエンコーダ、ポテンショメータなどが用いられる。角度センサ63は、検光子61から回転を直接に検出するように配置されるほか、回転手段62における回転部分から検光子61の回転を間接的に検出するように配置されていてもよい。
【0035】
ところで、照明手段2から被計測物8へ円偏光が照射されると、撮像手段4に入射する反射光は被計測物8の表面の向きに応じたパラメータを持つ楕円偏光になる。楕円偏光のパラメータは、背景技術において説明したように、楕円の長径aおよび短径b(または、楕円率)、基準の角度に対する楕円の傾きを表わす角度ψである。したがって、検光子61の回転角度θと撮像手段4の各画素の濃淡値との関係を用いると、撮像手段4の各画素に対応した被計測物8の表面の各部位の向きを定量的に計測することが可能になる。
【0036】
検光子61を互いに独立した少なくとも3つの回転角度θに設定した状態で、撮像素子の各画素で受光した強度Iを求めることにより、3個のパラメータψ,a,bが一意に定められる。回転角度θが独立しているとは、2つの回転角度θの差が180°の倍数ではないことを意味する。検光子61を少なくとも3つの回転角度θに設定し、それぞれの回転角度θにおける強度Iを上式に当てはめると、3個のパラメータψ,a,bを含む3個の数式が得られるから、未知数であるパラメータψ,a,bを定めることができる。すなわち、反射光の偏光状態が求められ、反射光の偏光状態から被計測物8の形状を計測することが可能になる。
【0037】
トリガ手段7は、角度センサ63が検出した検光子61の回転角度に基づいてトリガ信号を発生させる機能と、角度センサ63の出力とは無関係に適宜の時刻にトリガ信号を発生させる機能とを有している。
【0038】
角度センサ63の出力を用いるトリガ手段7は、角度センサ63から出力される検光子61の回転角度を用い、互いに独立した3つの回転角度においてトリガ信号を発生させる。トリガ信号を発生させる回転角度は、3つの回転角度のうちの2つずつの回転角度の差が180°の倍数でなければ、適宜に設定することが可能である。一方、角度センサ63の出力を用いないトリガ手段7は、適宜のタイミングでトリガ信号を発生させる。上述したトリガ信号は、撮像手段4に与えられる。
【0039】
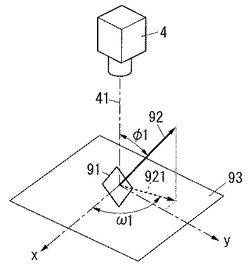
いま、図3に示すように、被計測物8の表面において撮像手段4の各画素に対応する範囲としての小領域91を規定し、小領域91の範囲では被計測物8の表面を平面とみなす。以下では、小領域91の法線ベクトル92が撮像手段4の光軸41に対してなす角度を傾斜角φ1で表わし、小領域91の法線ベクトル92をテーブル(図示せず)の表面に平行な基準平面93に投影した直線921が基準平面93内の基準の角度に対してなす角度を方位角ω1で表わす。基準平面93は、撮像手段4の撮像面に平行になる。傾斜角φ1は、撮像手段4に向かう向きを0°とし、被計測物8に向かう向きを180°とする。また、方位角ω1は、撮像手段4の画素配列における水平方向をx方向、垂直方向をy方向とするとき、x軸の正の向きを0°とし、x軸の負の向きを180°とする。なお、図3に示す座標系は、右手系であり、撮像手段4の光軸41と基準平面93との交点を原点とする。
【0040】
上述のように、傾斜角φ1と方位角ω1とを規定した場合、被計測物8について計測可能な範囲は、傾斜角φ1については最大で0〜90°であり、方位角ω1については最大で0〜180°になる。ここに、傾斜角φ1の制限は、傾斜角φ1が90°以上の部位が撮像手段4からは死角であって視野外になることによって生じる。また、方位角ω1の制限は、検光子61が2回回転対称であることによって生じる。つまり、検光子61は、楕円偏光における楕円の角度を0〜180°の範囲でのみ区別できるからである。
【0041】
これにより、被計測物8の表面の各部位を形成している小領域91の向きが計測される。小領域91の向きの計測により、被計測物8の表面粗さなどが計測される。また、小領域91の連続性に着目すれば、被計測物8の表面の三次元形状を推定することも可能になる。
【0042】
次に、本実施形態に係る3次元計測装置1の動作について図1を用いて説明する。まず、照明手段2が被計測物8の一部に円偏光を照射する。続いて、検光子61の所定の回転角度ごとに、移動手段3が撮像手段4の光軸41の回りに対称的に照明手段2を移動させる。撮像手段4は、照明手段2の移動開始から移動終了までの間、露光を継続して被計測物8を撮像する。その後、演算手段5は、検光子61の所定の回転角度ごとに撮像手段4で撮像された複数の撮像画像を用いて、被計測物8からの反射光の偏光状態を検出し、被計測物8の表面(被照射面)の傾斜角と方位角とを求める。
【0043】
以上説明した本実施形態の3次元計測装置1では、被計測物8の一部に円偏光を照射する照明手段2を被計測物8の被照射面が変わるように移動させることによって、照明手段2から被計測物8へ全方位から円偏光を照射することができる。その結果、被計測物8を精度よく計測することができる。
【0044】
(実施形態2)
実施形態2に係る3次元計測装置1は、図4に示すように照明範囲221,222ごとに撮像された撮像画像を用いて被計測物8の被照射面の向き(傾斜角、方位角)を求める点で、実施形態1に係る3次元計測装置1と相違する。なお、実施形態1の3次元計測装置1と同様の構成要素については、同一の符号を付して説明を省略する。
【0045】
本実施形態の3次元計測装置1は、撮像手段4の光軸41の回りで照明手段2が移動する全周を複数(図示例では2つ)の照明範囲221,222に分割する。
【0046】
本実施形態の照明手段2は、照明位置(方位)に応じて、点灯・消灯を制御することが可能な装置であり、照明範囲221,222ごとに個別に点灯する。
【0047】
本実施形態の撮像手段4は、照明範囲221,222を被計測物8の被照射面を撮像する。すなわち、撮像手段4は、照明手段2が照明範囲221を移動している間のみ被計測物8に円偏光を照射している場合と照明手段2が照明範囲222を移動している間のみ被計測物8に円偏光を照射している場合とのそれぞれにおいて被計測物8を撮像して撮像画像を生成する。なお、実施形態1の撮像手段4と同様の機能については説明を省略する。
【0048】
本実施形態の演算手段5は、照明範囲221,222ごとに撮像画像を用いて反射光の偏光状態を検出する。各照明範囲221,222での反射光の偏光状態を検出した演算手段5は、照明範囲221,222ごとの反射光の偏光状態と照明範囲221,222の方位とを用いて、被計測物8の被照射面の傾斜角と方位角とを求める。なお、実施形態1の演算手段5と同様の機能については説明を省略する。
【0049】
次に、本実施形態の3次元計測装置1の動作について図4を用いて説明する。まず、照明手段2は、移動手段3の制御によって移動を開始する。図4(a)に示すように、照明手段2は、照明範囲221を移動している間において点灯し、被計測物8に円偏光を照射する。その後、照明範囲221から照明範囲222へ移動すると、照明手段2は、照明範囲222を移動している間において消灯し、被計測物8への円偏光の照射を停止する。撮像手段4は、照明手段2が1回転する間、露光を継続して被計測物8を撮像する。
【0050】
続いて、照明手段2は、点灯タイミングを変更する。図4(b)に示すように、照明手段2は、照明範囲221を移動している間において消灯し、被計測物8への円偏光の照射を停止する。その後、照明範囲221から照明範囲222へ移動すると、照明手段2は、照明範囲222を移動している間において点灯し、被計測物8に円偏光を照射する。撮像手段4は、照明手段2が1回転する間、露光を継続して被計測物8を撮像する。
【0051】
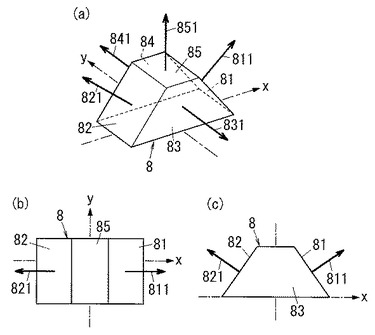
例えば被計測物8が図5のような形状である場合、図5(a)に示すように、第1の面81の法線ベクトルは811、第2の面82の法線ベクトルは821となる。また、第3の面83の法線ベクトルは831、第4の面84の法線ベクトルは841、第5の面85の法線ベクトルは851となる。このような被計測物8では、図5(b)(c)に示すように、第1の面81の法線ベクトル811と第2の面82の法線ベクトル821とは、傾斜角φ1が同じで、xy平面に投影した直線の向きが正反対になる。本実施形態の3次元計測装置1は、図5のような形状の被計測物8においても、第1の面81と第2の面82とを区別することができ、それぞれの面の傾斜角φ1と方位角ω1とを一意に決めることができる。
【0052】
以上説明した本実施形態の3次元計測装置1では、照明手段2が移動する全周を複数の照明範囲221,222に分割し、撮像手段4が照明範囲221,222ごとに被計測物8の被照射面を撮像する。これにより、被計測物8の被照射面の方位角を一意に決めることができ、方位角の不定性を解消することができる。
【0053】
なお、本実施形態の変形例として、照明手段2が全周において常に円偏光を被計測物8に照射したまま、撮像手段4が照明手段2の位置(照明範囲221,222)ごとに露光を区切って撮像してもよい。これにより、撮像手段4は、照明範囲221,222ごとに撮像画像を生成することができる。撮像手段4が被計測物8を撮像するタイミングは、実施形態1と同様に、トリガ手段7から出力されるトリガ信号によって定められる。また、露光期間は撮像手段4を駆動するクロック信号によって定められる。
【0054】
(実施形態3)
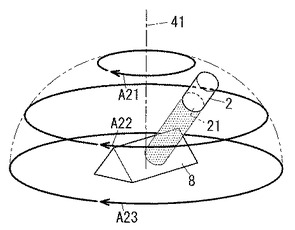
実施形態3に係る3次元計測装置1は、図6に示すように、照明手段2が円偏光を平行光で被計測物8に照射する点で、実施形態1に係る3次元計測装置1と相違する。なお、実施形態1の3次元計測装置1と同様の構成要素については、同一の符号を付して説明を省略する。
【0055】
本実施形態の照明手段2は、図6に示すように、円偏光を平行光で被計測物8に照射する。なお、実施形態1の照明手段2と同様の機能については説明を省略する。
【0056】
本実施形態の移動手段3は、撮像手段4の光軸41の回りに軸対称に照明手段2を移動させる第1の機構と、被計測物8を包含する半球において光軸41を直径とする円周方向に照明手段2を移動させる第2の機構とを含んでいる。なお、実施形態1の移動手段3と同様の機能については説明を省略する。
【0057】
照明手段2は、移動手段3の第1の機構によって、図6の矢印A21のように撮像手段4の光軸41の回りに軸対称に移動(走査)しながら、円偏光を被計測物8に照射する。照明手段2は、上記動作を、移動手段3の第2の機構によって、被計測物8を包含する半球において光軸41を直径とする円周上の位置を変えながら行う(図6の矢印A22,A23)。
【0058】
以上説明した本実施形態の3次元計測装置1においても、照明手段2から被計測物8へ全方位から円偏光を照射することができるので、被計測物8の形状を精度よく計測することができる。
【0059】
なお、本実施形態における円偏光を平行光で被計測物8に照射する機能を実施形態2の3次元計測装置1に適用してもよい。
【0060】
(実施形態4)
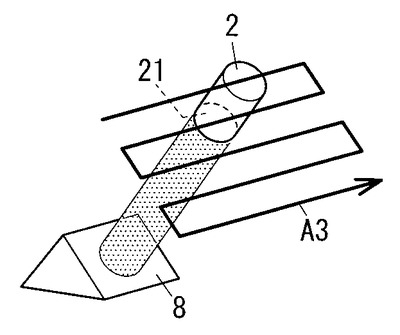
実施形態4に係る3次元計測装置1は、図7に示すように、照明手段2が被計測物8の表面に正対するように移動する点で、実施形態1に係る3次元計測装置1と相違する。なお、実施形態1の3次元計測装置1と同様の構成要素については、同一の符号を付して説明を省略する。
【0061】
本実施形態の照明手段2は、図7に示すように、被計測物8の表面に正対するように設置されている。なお、実施形態1の照明手段2と同様の機能については説明を省略する。
【0062】
本実施形態の移動手段3は、照明手段2が被計測物8の表面に正対する状態で、被計測物8の被照射面が変わるように照明手段2を図7の矢印A3のように移動させる。なお、実施形態1の移動手段3と同様の機能については説明を省略する。
【0063】
以上説明した本実施形態の3次元計測装置1では、照明手段2が被計測物8に対して計測に必要な方向からのみ円偏光を照射することができるので、照明手段2の移動時間を短縮することができ、その結果、計測時間を短くすることができる。
【0064】
なお、各実施形態では、照明手段2から被計測物8に照射された光の反射光を撮像手段4に入射させる場合について説明したが、照明手段2から被計測物8に照射された光の透過光を撮像手段4に入射させてもよい。したがって、各実施形態の説明における反射光は、特に断りがなければ透過光と読み替えることが可能である。
【符号の説明】
【0065】
1 3次元計測装置
2 照明手段
21 発光面
221,222 照明範囲
3 移動手段
4 撮像手段
41 光軸
5 演算手段
8 被計測物
【技術分野】
【0001】
本発明は、被計測物に円偏光を照射し、被計測物で反射した反射光または被計測物を透過した透過光の偏光状態を解析することにより、被計測物の形状を計測する3次元計測装置およびそれに用いられる照明装置に関する。
【背景技術】
【0002】
従来から、被計測物の形状を計測するために、被計測物に光を照射し、被計測物で反射された反射光または被計測物を透過した透過光の偏光状態を解析する技術が知られている(例えば特許文献1参照)。この種の技術は、エリプソメトリーと呼ばれている。以下では、被計測物に照射された後の光に関して反射光についてのみ記載するが、この反射光の用語は特に断りがなければ、被計測物を透過した透過光と読み替え可能である。
【0003】
被計測物で反射された反射光は、検光子を通して光センサで受光される。光センサは、受光強度に応じた出力が得られる構成であればよいが、被計測物を広範囲にわたって同時に計測する場合にはカメラのような撮像手段が用いられる。検光子は、光センサ(撮像手段)が被計測物を見込む光軸の回りに回転可能になっている。
【0004】
被計測物での反射光は偏光であるから、楕円偏光により一般化して扱うことができる。楕円偏光のパラメータは、規定した基準の角度に対する楕円の傾きを表わす角度ψと、楕円の長径aおよび短径bとの3個で表される。一方、検光子を通過した光の強度Iは、検光子の回転角度θの関数でもあるから、結局、強度Iは、4個のパラメータa,b,θ,ψを持つ関数fとして表わされる。すなわち、I=f(a,b,θ,ψ)になる。ここに、直線偏光はb=0の条件で表わされ、円偏光はa=bの条件で表わされる。また、関数fの形は既知である。なお、長径aと短径bとの絶対値は、被計測物に照射された光の強度によって変化するが、偏光状態を知るには長径aと短径bとの比(楕円率)がわかればよいから、長径aと短径bとの絶対値は変化してもよい、つまり、被計測物に照射する光の強度は考慮しなくてもよい。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】国際公開第2010/021148号
【発明の概要】
【発明が解決しようとする課題】
【0006】
このような3次元計測装置において、高精度な計測を実現するには、完全な円偏光を、被計測物の表面で正反射して撮像手段の方向へ反射するように照射する必要がある。このためには、被計測物へ円偏光を全方位から照射することが必要である。
【0007】
しかしながら、特許文献1に記載された従来の計測装置では、照明手段の発光面が、円偏光を面発光する複数の平面を組み合わせた多面体となっている。このため、照明手段が被計測物にすべての角度から円偏光を照射することができず、計測誤差の原因となるという問題があった。
【0008】
上記問題を解決する手法として、発光面が半球状に形成されて被計測物を覆うように配置された照明手段が考えられる。
【0009】
しかしながら、発光面を半球状に精度よく形成することは難しく、かえって計測精度を下げることになる。
【0010】
本発明は上記の点に鑑みて為された発明であり、本発明の目的は、被計測物を精度よく計測することができる3次元計測装置およびそれに用いられる照明装置を提供することにある。
【課題を解決するための手段】
【0011】
本発明の3次元計測装置は、被計測物に円偏光を照射する照明手段と、前記被計測物の被照射面からの反射光を受けて前記被照射面を撮像する撮像手段と、前記撮像手段で撮像された撮像画像を用いて前記反射光の偏光状態を検出し、前記被照射面の向きを求める演算手段と、前記照明手段を移動させる移動手段とを備え、前記照明手段は、前記円偏光を前記被計測物の一部に照射し、前記移動手段は、前記被計測物において前記被照射面の位置が変わるように前記照明手段を移動させることを特徴とする。
【0012】
この3次元計測装置において、前記移動手段は、前記撮像手段の光軸の回りに軸対称に前記照明手段を移動させることが好ましい。
【0013】
この3次元計測装置において、前記照明手段は、前記被計測物を包含する半球と前記光軸を含む平面との交線に沿った形状に形成された発光面を有することが好ましい。
【0014】
この3次元計測装置において、前記撮像手段は、前記光軸の回りで前記照明手段が移動する全周を複数に分割した照明範囲ごとに前記被照射面を撮像し、前記演算手段は、前記照明範囲ごとに前記撮像手段で撮像された前記撮像画像を用いて前記反射光の偏光状態を検出し、前記照明範囲ごとの前記偏光状態と当該照明範囲の方位とを用いて、前記被照射面の法線方向が前記光軸に対してなす角度を表わす傾斜角と、前記被照射面の法線を前記光軸と直交する平面に投影した直線の方向を表わす方位角とを求めることが好ましい。
【0015】
この3次元計測装置において、前記照明手段は、前記円偏光を平行光で前記被計測物に照射することが好ましい。
【0016】
この3次元計測装置において、前記移動手段は、前記撮像手段の光軸の回りに軸対称に前記照明手段を移動させる第1の機構と、前記被計測物を包含する半球において前記光軸を直径とする円周方向に前記照明手段を移動させる第2の機構とを含むことが好ましい。
【0017】
本発明の照明装置は、被計測物に円偏光を照射し、前記被計測物の被照射面で反射した反射光の偏光状態を検出して前記被照射面の向きを求める3次元計測装置に用いられる照明装置であって、前記円偏光を前記被計測物の一部に照射する照明手段と、前記被計測物において前記被照射面の位置が変わるように前記照明手段を移動させる移動手段とを備えることを特徴とする。
【発明の効果】
【0018】
本発明によれば、被計測物を精度よく計測することが可能になるという利点がある。
【図面の簡単な説明】
【0019】
【図1】実施形態1に係る3次元計測装置を示す概略構成図である。
【図2】同上に係る3次元計測装置の動作説明図である。
【図3】同上に係る3次元計測装置の原理説明図である。
【図4】実施形態2に係る3次元計測装置の動作説明図である。
【図5】被計測物の一例であって、(a)は斜視図、(b)は上面図、(c)は側面図である。
【図6】実施形態3に係る3次元計測装置の動作説明図である。
【図7】実施形態4に係る3次元計測装置の動作説明図である。
【発明を実施するための形態】
【0020】
(実施形態1)
本実施形態に係る3次元計測装置1は、図1に示すように、円偏光を用いて被計測物8の表面状態を計測する装置である。すなわち、本実施形態の3次元計測装置1は、被計測物8に円偏光を照射し、被計測物8の表面(被照射面)で反射した反射光の偏光状態を検出して上記被照射面(反射面)の向きを求める。この3次元計測装置1は、被計測物8に円偏光を照射する照明手段2と、照明手段2を移動させる移動手段3と、被計測物8を撮像する撮像手段4と、撮像手段4で撮像された撮像画像を用いて被計測物8の被照射面の向きを求める演算手段5とを備えている。照明手段2から発せられた光は被計測物8の被照射面で反射した際に円偏光状態から楕円偏光状態に変化する。すなわち、被計測物8の被照射面で反射した反射光は楕円偏光状態である。また、3次元計測装置1は、被計測物8と撮像手段4との間に配置された検光子61と、検光子61の回転角度に応じてトリガ信号を出力するトリガ手段7とを備えている。照明手段2と移動手段3とで照明装置を構成する。被計測物8は、図示しないテーブル上に配置されており、テーブルの上方に撮像手段4が配置されている。すなわち、撮像手段4は、テーブル上面の法線方向と光軸41(図2参照)とが平行になるように配置されている。被計測物8は、撮像手段4が被計測物8を見込む光軸41上に配置されている。
【0021】
上記のような構成の3次元計測装置1は、被計測物8の微小領域に円偏光を照射する照明手段2を移動させることによって、被計測物8の全方位から完全な円偏光を照射することを実現する。以下、3次元計測装置1の各構成要素について説明する。
【0022】
照明手段2は、被計測物8に円偏光を照射する。例えば、照明手段2は、重ねて配置された偏光板(図示せず)と四分の一波長板(図示せず)とを備えており、偏光板を通して直線偏光になった光を四分の一波長板に通すことによって円偏光を生成し、上記円偏光を被計測物8に照射する。すなわち、照明手段2は、光源(図示せず)からの光を偏光板と四分の一波長板とに通すことによって円偏光を被計測物8に照射する。
【0023】
本実施形態の照明手段2は、図2に示すように、被計測物8を包含する半球と光軸41を含む平面との交線に沿った形状に形成された発光面21を有している。すなわち、照明手段2は、下面が半球の一部のように凹んだ発光面21を有している。照明手段2は、発光面21が撮像手段4の光軸41を囲むように配置されている。
【0024】
このような照明手段2は、円偏光を被計測物8の一部に照射し、移動手段3によって図2の矢印A1のように撮像手段4の光軸41の周囲の全周にわたって移動(走査)しながら、被計測物8に斜め上方および側方から円偏光を照射する。このとき、照明手段2は、撮像手段4の視野を遮らないように移動する。したがって、照明手段2は、撮像手段4の光軸41の周囲の全周を移動することによって、リング照明のように、被計測物8を全周にわたって均等に照明する。すなわち、照明手段2は、撮像手段4の光軸41の周囲を移動しながら、被計測物8に対して斜め上方および側方から円偏光を均等に照射する。
【0025】
なお、照明手段2は、被計測物8に円偏光を照射することが可能であれば、どのような構成でもよい。照明手段2に用いられる光源は、撮像手段4が撮像している間に光出力が変動することがないよう、直流安定化電源を用いて点灯させるものが好ましい。
【0026】
移動手段3は、例えばCPU(Central Processing Unit:中央処理装置)を主構成要素とし、図2の矢印A1のように照明手段2を移動させる。すなわち、移動手段3は、被計測物8において被照射面の位置が変わるように照明手段2を移動させる。
【0027】
本実施形態では、移動手段3は、撮像手段4の光軸41の回りに軸対称に照明手段2を移動させる。すなわち、移動手段3は、検光子61(図1参照)の所定の回転角度(後述)ごとに、照明手段2を被計測物8の周囲に1周ずつ回転させる。なお、移動手段3は、用途に応じて、照明手段2の移動量を1回転未満としてもよい。
【0028】
図1に示す撮像手段4は、被計測物8の被照射面からの反射光を受けて上記被照射面を撮像する。撮像手段4は、CCD(Charge Coupled Device)イメージセンサやCMOS(ComplementaryMetal Oxide Semiconductor)イメージセンサのように2次元格子の格子点上に画素が配列された撮像素子を備えている。被計測物8の被照射面からの反射光は楕円偏光であり、撮像手段4は検光子61を通して反射光を受ける。また、撮像手段4は受光光学系を備えており、被計測物8の被照射面からの反射光(楕円偏光)は受光光学系を通して撮像素子に入射される。本実施形態の撮像手段4は、検光子61の所定の回転角度(後述)ごとに、照明手段2の移動開始(回転開始)から移動終了(回転終了)までの間、露光を継続して被計測物8を撮像する。
【0029】
撮像手段4は、検光子61の所定の回転角度ごとに、被計測物8を撮像した後、画素値を濃淡値とする撮像画像を生成する。例えば、撮像手段4は、検光子61の回転角度が10°変わるごとに被計測物8を撮像する場合、全部で18枚の撮像画像を生成する。撮像手段4の各画素の画素値には、被計測物8の表面の場所ごとの反射光の強度が反映される。言い換えると、撮像手段4の画素ごとの画素値は、被計測物8の場所ごとの反射光の偏光状態を反映していることになる。撮像手段4から出力される画素ごとの画素値は演算手段5に入力される。
【0030】
なお、撮像手段4は、検光子61の所定の回転角度において、露光を継続して被計測物8を撮像するのではなく、照明手段2の位置ごとに被計測物8を撮像してもよい。この場合、撮像手段4は、照明手段2の位置ごとに撮像して生成した複数の撮像画像を用いて、画素ごとに画素値を積算した1枚の撮像画像(合成画像)を生成する。すなわち、撮像手段4は、照明手段2の位置ごとの撮像画像を合成して1枚の撮像画像を生成する。
【0031】
演算手段5は、例えばCPU(Central Processing Unit:中央処理装置)を主構成要素とし、検光子61の所定の回転角度ごとに撮像手段4で撮像された撮像画像を用いて反射光の偏光状態を検出する。すなわち、演算手段5は、撮像画像の画素ごとの画素値と検光子61の所定の回転角度との関係を用いて、反射光の偏光状態、つまり、被計測物8の表面に関して画素に対応する部位の偏光状態を解析する(背景技術を参照)。要するに、偏光状態を決めるパラメータを、被計測物8の部位ごとに求める。
【0032】
偏光状態を決めるパラメータを求めるには、後述するように、検光子61が互いに独立した3つの回転角度であるときに、それぞれの回転角度において受光する光の強度を求める必要がある。このことから、撮像手段4による撮像のタイミングを検光子61の回転角度と対応付けることが必要である。そのため、撮像手段4が被計測物8からの反射光を取り込むタイミングを指示するトリガ信号をトリガ手段7によって発生させている。
【0033】
反射光の偏光状態を検出した演算手段5は、被計測物8の被照射面からの反射光の偏光状態から上記被照射面の向きを求める。被計測物8の被照射面の向きとは、被照射面の法線方向が撮像手段4の光軸41に対してなす角度を表わす傾斜角、および、被照射面の法線を光軸41と直交する平面に投影した直線の方向を表わす方位角である。
【0034】
検光子61は、例えば直線偏光板などであり、撮像手段4と被計測物8との間において、撮像手段4の光軸41(図2参照)と平行な回転中心の回りで回転するように配置されており、回転手段62により回転駆動される。回転手段62は、モータを備えている。また、検光子61は、規定した基準の角度に対する回転角度が角度センサ63により計測される。角度センサ63は、検光子61の回転角度を検出するロータリエンコーダ、ポテンショメータなどが用いられる。角度センサ63は、検光子61から回転を直接に検出するように配置されるほか、回転手段62における回転部分から検光子61の回転を間接的に検出するように配置されていてもよい。
【0035】
ところで、照明手段2から被計測物8へ円偏光が照射されると、撮像手段4に入射する反射光は被計測物8の表面の向きに応じたパラメータを持つ楕円偏光になる。楕円偏光のパラメータは、背景技術において説明したように、楕円の長径aおよび短径b(または、楕円率)、基準の角度に対する楕円の傾きを表わす角度ψである。したがって、検光子61の回転角度θと撮像手段4の各画素の濃淡値との関係を用いると、撮像手段4の各画素に対応した被計測物8の表面の各部位の向きを定量的に計測することが可能になる。
【0036】
検光子61を互いに独立した少なくとも3つの回転角度θに設定した状態で、撮像素子の各画素で受光した強度Iを求めることにより、3個のパラメータψ,a,bが一意に定められる。回転角度θが独立しているとは、2つの回転角度θの差が180°の倍数ではないことを意味する。検光子61を少なくとも3つの回転角度θに設定し、それぞれの回転角度θにおける強度Iを上式に当てはめると、3個のパラメータψ,a,bを含む3個の数式が得られるから、未知数であるパラメータψ,a,bを定めることができる。すなわち、反射光の偏光状態が求められ、反射光の偏光状態から被計測物8の形状を計測することが可能になる。
【0037】
トリガ手段7は、角度センサ63が検出した検光子61の回転角度に基づいてトリガ信号を発生させる機能と、角度センサ63の出力とは無関係に適宜の時刻にトリガ信号を発生させる機能とを有している。
【0038】
角度センサ63の出力を用いるトリガ手段7は、角度センサ63から出力される検光子61の回転角度を用い、互いに独立した3つの回転角度においてトリガ信号を発生させる。トリガ信号を発生させる回転角度は、3つの回転角度のうちの2つずつの回転角度の差が180°の倍数でなければ、適宜に設定することが可能である。一方、角度センサ63の出力を用いないトリガ手段7は、適宜のタイミングでトリガ信号を発生させる。上述したトリガ信号は、撮像手段4に与えられる。
【0039】
いま、図3に示すように、被計測物8の表面において撮像手段4の各画素に対応する範囲としての小領域91を規定し、小領域91の範囲では被計測物8の表面を平面とみなす。以下では、小領域91の法線ベクトル92が撮像手段4の光軸41に対してなす角度を傾斜角φ1で表わし、小領域91の法線ベクトル92をテーブル(図示せず)の表面に平行な基準平面93に投影した直線921が基準平面93内の基準の角度に対してなす角度を方位角ω1で表わす。基準平面93は、撮像手段4の撮像面に平行になる。傾斜角φ1は、撮像手段4に向かう向きを0°とし、被計測物8に向かう向きを180°とする。また、方位角ω1は、撮像手段4の画素配列における水平方向をx方向、垂直方向をy方向とするとき、x軸の正の向きを0°とし、x軸の負の向きを180°とする。なお、図3に示す座標系は、右手系であり、撮像手段4の光軸41と基準平面93との交点を原点とする。
【0040】
上述のように、傾斜角φ1と方位角ω1とを規定した場合、被計測物8について計測可能な範囲は、傾斜角φ1については最大で0〜90°であり、方位角ω1については最大で0〜180°になる。ここに、傾斜角φ1の制限は、傾斜角φ1が90°以上の部位が撮像手段4からは死角であって視野外になることによって生じる。また、方位角ω1の制限は、検光子61が2回回転対称であることによって生じる。つまり、検光子61は、楕円偏光における楕円の角度を0〜180°の範囲でのみ区別できるからである。
【0041】
これにより、被計測物8の表面の各部位を形成している小領域91の向きが計測される。小領域91の向きの計測により、被計測物8の表面粗さなどが計測される。また、小領域91の連続性に着目すれば、被計測物8の表面の三次元形状を推定することも可能になる。
【0042】
次に、本実施形態に係る3次元計測装置1の動作について図1を用いて説明する。まず、照明手段2が被計測物8の一部に円偏光を照射する。続いて、検光子61の所定の回転角度ごとに、移動手段3が撮像手段4の光軸41の回りに対称的に照明手段2を移動させる。撮像手段4は、照明手段2の移動開始から移動終了までの間、露光を継続して被計測物8を撮像する。その後、演算手段5は、検光子61の所定の回転角度ごとに撮像手段4で撮像された複数の撮像画像を用いて、被計測物8からの反射光の偏光状態を検出し、被計測物8の表面(被照射面)の傾斜角と方位角とを求める。
【0043】
以上説明した本実施形態の3次元計測装置1では、被計測物8の一部に円偏光を照射する照明手段2を被計測物8の被照射面が変わるように移動させることによって、照明手段2から被計測物8へ全方位から円偏光を照射することができる。その結果、被計測物8を精度よく計測することができる。
【0044】
(実施形態2)
実施形態2に係る3次元計測装置1は、図4に示すように照明範囲221,222ごとに撮像された撮像画像を用いて被計測物8の被照射面の向き(傾斜角、方位角)を求める点で、実施形態1に係る3次元計測装置1と相違する。なお、実施形態1の3次元計測装置1と同様の構成要素については、同一の符号を付して説明を省略する。
【0045】
本実施形態の3次元計測装置1は、撮像手段4の光軸41の回りで照明手段2が移動する全周を複数(図示例では2つ)の照明範囲221,222に分割する。
【0046】
本実施形態の照明手段2は、照明位置(方位)に応じて、点灯・消灯を制御することが可能な装置であり、照明範囲221,222ごとに個別に点灯する。
【0047】
本実施形態の撮像手段4は、照明範囲221,222を被計測物8の被照射面を撮像する。すなわち、撮像手段4は、照明手段2が照明範囲221を移動している間のみ被計測物8に円偏光を照射している場合と照明手段2が照明範囲222を移動している間のみ被計測物8に円偏光を照射している場合とのそれぞれにおいて被計測物8を撮像して撮像画像を生成する。なお、実施形態1の撮像手段4と同様の機能については説明を省略する。
【0048】
本実施形態の演算手段5は、照明範囲221,222ごとに撮像画像を用いて反射光の偏光状態を検出する。各照明範囲221,222での反射光の偏光状態を検出した演算手段5は、照明範囲221,222ごとの反射光の偏光状態と照明範囲221,222の方位とを用いて、被計測物8の被照射面の傾斜角と方位角とを求める。なお、実施形態1の演算手段5と同様の機能については説明を省略する。
【0049】
次に、本実施形態の3次元計測装置1の動作について図4を用いて説明する。まず、照明手段2は、移動手段3の制御によって移動を開始する。図4(a)に示すように、照明手段2は、照明範囲221を移動している間において点灯し、被計測物8に円偏光を照射する。その後、照明範囲221から照明範囲222へ移動すると、照明手段2は、照明範囲222を移動している間において消灯し、被計測物8への円偏光の照射を停止する。撮像手段4は、照明手段2が1回転する間、露光を継続して被計測物8を撮像する。
【0050】
続いて、照明手段2は、点灯タイミングを変更する。図4(b)に示すように、照明手段2は、照明範囲221を移動している間において消灯し、被計測物8への円偏光の照射を停止する。その後、照明範囲221から照明範囲222へ移動すると、照明手段2は、照明範囲222を移動している間において点灯し、被計測物8に円偏光を照射する。撮像手段4は、照明手段2が1回転する間、露光を継続して被計測物8を撮像する。
【0051】
例えば被計測物8が図5のような形状である場合、図5(a)に示すように、第1の面81の法線ベクトルは811、第2の面82の法線ベクトルは821となる。また、第3の面83の法線ベクトルは831、第4の面84の法線ベクトルは841、第5の面85の法線ベクトルは851となる。このような被計測物8では、図5(b)(c)に示すように、第1の面81の法線ベクトル811と第2の面82の法線ベクトル821とは、傾斜角φ1が同じで、xy平面に投影した直線の向きが正反対になる。本実施形態の3次元計測装置1は、図5のような形状の被計測物8においても、第1の面81と第2の面82とを区別することができ、それぞれの面の傾斜角φ1と方位角ω1とを一意に決めることができる。
【0052】
以上説明した本実施形態の3次元計測装置1では、照明手段2が移動する全周を複数の照明範囲221,222に分割し、撮像手段4が照明範囲221,222ごとに被計測物8の被照射面を撮像する。これにより、被計測物8の被照射面の方位角を一意に決めることができ、方位角の不定性を解消することができる。
【0053】
なお、本実施形態の変形例として、照明手段2が全周において常に円偏光を被計測物8に照射したまま、撮像手段4が照明手段2の位置(照明範囲221,222)ごとに露光を区切って撮像してもよい。これにより、撮像手段4は、照明範囲221,222ごとに撮像画像を生成することができる。撮像手段4が被計測物8を撮像するタイミングは、実施形態1と同様に、トリガ手段7から出力されるトリガ信号によって定められる。また、露光期間は撮像手段4を駆動するクロック信号によって定められる。
【0054】
(実施形態3)
実施形態3に係る3次元計測装置1は、図6に示すように、照明手段2が円偏光を平行光で被計測物8に照射する点で、実施形態1に係る3次元計測装置1と相違する。なお、実施形態1の3次元計測装置1と同様の構成要素については、同一の符号を付して説明を省略する。
【0055】
本実施形態の照明手段2は、図6に示すように、円偏光を平行光で被計測物8に照射する。なお、実施形態1の照明手段2と同様の機能については説明を省略する。
【0056】
本実施形態の移動手段3は、撮像手段4の光軸41の回りに軸対称に照明手段2を移動させる第1の機構と、被計測物8を包含する半球において光軸41を直径とする円周方向に照明手段2を移動させる第2の機構とを含んでいる。なお、実施形態1の移動手段3と同様の機能については説明を省略する。
【0057】
照明手段2は、移動手段3の第1の機構によって、図6の矢印A21のように撮像手段4の光軸41の回りに軸対称に移動(走査)しながら、円偏光を被計測物8に照射する。照明手段2は、上記動作を、移動手段3の第2の機構によって、被計測物8を包含する半球において光軸41を直径とする円周上の位置を変えながら行う(図6の矢印A22,A23)。
【0058】
以上説明した本実施形態の3次元計測装置1においても、照明手段2から被計測物8へ全方位から円偏光を照射することができるので、被計測物8の形状を精度よく計測することができる。
【0059】
なお、本実施形態における円偏光を平行光で被計測物8に照射する機能を実施形態2の3次元計測装置1に適用してもよい。
【0060】
(実施形態4)
実施形態4に係る3次元計測装置1は、図7に示すように、照明手段2が被計測物8の表面に正対するように移動する点で、実施形態1に係る3次元計測装置1と相違する。なお、実施形態1の3次元計測装置1と同様の構成要素については、同一の符号を付して説明を省略する。
【0061】
本実施形態の照明手段2は、図7に示すように、被計測物8の表面に正対するように設置されている。なお、実施形態1の照明手段2と同様の機能については説明を省略する。
【0062】
本実施形態の移動手段3は、照明手段2が被計測物8の表面に正対する状態で、被計測物8の被照射面が変わるように照明手段2を図7の矢印A3のように移動させる。なお、実施形態1の移動手段3と同様の機能については説明を省略する。
【0063】
以上説明した本実施形態の3次元計測装置1では、照明手段2が被計測物8に対して計測に必要な方向からのみ円偏光を照射することができるので、照明手段2の移動時間を短縮することができ、その結果、計測時間を短くすることができる。
【0064】
なお、各実施形態では、照明手段2から被計測物8に照射された光の反射光を撮像手段4に入射させる場合について説明したが、照明手段2から被計測物8に照射された光の透過光を撮像手段4に入射させてもよい。したがって、各実施形態の説明における反射光は、特に断りがなければ透過光と読み替えることが可能である。
【符号の説明】
【0065】
1 3次元計測装置
2 照明手段
21 発光面
221,222 照明範囲
3 移動手段
4 撮像手段
41 光軸
5 演算手段
8 被計測物
【特許請求の範囲】
【請求項1】
被計測物に円偏光を照射する照明手段と、
前記被計測物の被照射面からの反射光を受けて前記被照射面を撮像する撮像手段と、
前記撮像手段で撮像された撮像画像を用いて前記反射光の偏光状態を検出し、前記被照射面の向きを求める演算手段と、
前記照明手段を移動させる移動手段とを備え、
前記照明手段は、前記円偏光を前記被計測物の一部に照射し、
前記移動手段は、前記被計測物において前記被照射面の位置が変わるように前記照明手段を移動させる
ことを特徴とする3次元計測装置。
【請求項2】
前記移動手段は、前記撮像手段の光軸の回りに軸対称に前記照明手段を移動させることを特徴とする請求項1記載の3次元計測装置。
【請求項3】
前記照明手段は、前記被計測物を包含する半球と前記光軸を含む平面との交線に沿った形状に形成された発光面を有することを特徴とする請求項2記載の3次元計測装置。
【請求項4】
前記撮像手段は、前記光軸の回りで前記照明手段が移動する全周を複数に分割した照明範囲ごとに前記被照射面を撮像し、
前記演算手段は、前記照明範囲ごとに前記撮像手段で撮像された前記撮像画像を用いて前記反射光の偏光状態を検出し、前記照明範囲ごとの前記偏光状態と当該照明範囲の方位とを用いて、前記被照射面の法線方向が前記光軸に対してなす角度を表わす傾斜角と、前記被照射面の法線を前記光軸と直交する平面に投影した直線の方向を表わす方位角とを求める
ことを特徴とする請求項2または3記載の3次元計測装置。
【請求項5】
前記照明手段は、前記円偏光を平行光で前記被計測物に照射することを特徴とする請求項1〜4のいずれか1項に記載の3次元計測装置。
【請求項6】
前記移動手段は、前記撮像手段の光軸の回りに軸対称に前記照明手段を移動させる第1の機構と、前記被計測物を包含する半球において前記光軸を直径とする円周方向に前記照明手段を移動させる第2の機構とを含むことを特徴とする請求項5記載の3次元計測装置。
【請求項7】
被計測物に円偏光を照射し、前記被計測物の被照射面で反射した反射光の偏光状態を検出して前記被照射面の向きを求める3次元計測装置に用いられる照明装置であって、
前記円偏光を前記被計測物の一部に照射する照明手段と、
前記被計測物において前記被照射面の位置が変わるように前記照明手段を移動させる移動手段と
を備えることを特徴とする照明装置。
【請求項1】
被計測物に円偏光を照射する照明手段と、
前記被計測物の被照射面からの反射光を受けて前記被照射面を撮像する撮像手段と、
前記撮像手段で撮像された撮像画像を用いて前記反射光の偏光状態を検出し、前記被照射面の向きを求める演算手段と、
前記照明手段を移動させる移動手段とを備え、
前記照明手段は、前記円偏光を前記被計測物の一部に照射し、
前記移動手段は、前記被計測物において前記被照射面の位置が変わるように前記照明手段を移動させる
ことを特徴とする3次元計測装置。
【請求項2】
前記移動手段は、前記撮像手段の光軸の回りに軸対称に前記照明手段を移動させることを特徴とする請求項1記載の3次元計測装置。
【請求項3】
前記照明手段は、前記被計測物を包含する半球と前記光軸を含む平面との交線に沿った形状に形成された発光面を有することを特徴とする請求項2記載の3次元計測装置。
【請求項4】
前記撮像手段は、前記光軸の回りで前記照明手段が移動する全周を複数に分割した照明範囲ごとに前記被照射面を撮像し、
前記演算手段は、前記照明範囲ごとに前記撮像手段で撮像された前記撮像画像を用いて前記反射光の偏光状態を検出し、前記照明範囲ごとの前記偏光状態と当該照明範囲の方位とを用いて、前記被照射面の法線方向が前記光軸に対してなす角度を表わす傾斜角と、前記被照射面の法線を前記光軸と直交する平面に投影した直線の方向を表わす方位角とを求める
ことを特徴とする請求項2または3記載の3次元計測装置。
【請求項5】
前記照明手段は、前記円偏光を平行光で前記被計測物に照射することを特徴とする請求項1〜4のいずれか1項に記載の3次元計測装置。
【請求項6】
前記移動手段は、前記撮像手段の光軸の回りに軸対称に前記照明手段を移動させる第1の機構と、前記被計測物を包含する半球において前記光軸を直径とする円周方向に前記照明手段を移動させる第2の機構とを含むことを特徴とする請求項5記載の3次元計測装置。
【請求項7】
被計測物に円偏光を照射し、前記被計測物の被照射面で反射した反射光の偏光状態を検出して前記被照射面の向きを求める3次元計測装置に用いられる照明装置であって、
前記円偏光を前記被計測物の一部に照射する照明手段と、
前記被計測物において前記被照射面の位置が変わるように前記照明手段を移動させる移動手段と
を備えることを特徴とする照明装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−113793(P2013−113793A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−262445(P2011−262445)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]