
3次元造形装置
【課題】 製造コストの増大を抑制しつつ、廃液タンク内の廃液が一定量を越えたことを確実に検知することができる3次元造形装置を提供する。
【解決手段】 廃液タンク13H内の廃液の蓄積量を検出するための蓄積量検出センサと、一端が廃液タンク13H内に配設され、他端がパージトレイ114に接続された廃液管と、パージトレイ114内の廃液を廃液タンク13Hへ流入させる廃液ポンプ60と、廃液ポンプ60よりも廃液タンク13H側において、廃液管内の圧力を測定する圧力センサと、廃液ポンプ60の逆回転時における圧力センサの出力に基づいて、廃液タンク13H内の液面が廃液管の一端に到達したことを検出する液面検出部408と、液面検出結果又は蓄積量検出センサの検出結果に基づいて、廃液タンク13H内の廃液の蓄積量が一定量を越えたか否かを判定する廃棄要否判定部411により構成される。
【解決手段】 廃液タンク13H内の廃液の蓄積量を検出するための蓄積量検出センサと、一端が廃液タンク13H内に配設され、他端がパージトレイ114に接続された廃液管と、パージトレイ114内の廃液を廃液タンク13Hへ流入させる廃液ポンプ60と、廃液ポンプ60よりも廃液タンク13H側において、廃液管内の圧力を測定する圧力センサと、廃液ポンプ60の逆回転時における圧力センサの出力に基づいて、廃液タンク13H内の液面が廃液管の一端に到達したことを検出する液面検出部408と、液面検出結果又は蓄積量検出センサの検出結果に基づいて、廃液タンク13H内の廃液の蓄積量が一定量を越えたか否かを判定する廃棄要否判定部411により構成される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、3次元造形装置に係り、さらに詳しくは、造形材からなる造形材層を積層形成する3次元造形装置の改良に関する。
【背景技術】
【0002】
近年、積層造形法を用いて、立体造形物を簡易的に作製することが行われている。積層造形法は、造形対象物を多数の薄い層に分割した際の各層と同じ2次元形状の薄板を形成し、この薄板を積層して立体造形物を作製する造形方法であり、ラピッドプロトタイピングに用いられている。この様な積層造形法には、光造形法、粉末結合法、シート堆積法、樹脂押し出し法、インクジェット方式などがある(例えば、特許文献1)。
【0003】
インクジェット方式の造形法は、インクジェットプリンタの技術を利用した造形法であり、インクの代わりに紫外線(UV)硬化樹脂などの光硬化性の造形材を用い、造形材をノズルから吐出させ、造形ステージ上に堆積させた造形材に光を照射して固化させる。この造形法では、造形材を吐出するための多数の吐出口が略直線状に配列された造形材ノズルを造形ステージと平行に2次元走査することによって、造形材からなるスライス層が形成され、スライス層を順に積層形成することによって立体造形物が形成される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−90530号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
インクジェット方式の3次元造形装置には、使用済みの造形材からなる廃液を蓄積するための廃液タンクが設けられている。この廃液タンクには、造形中に回収された造形材や、定期的に行われるメンテナンス時にパージトレイ内に排出された造形材が収容される。通常、廃液タンクは、廃液の蓄積量が一定量を越えた時点で交換される。
【0006】
従来の3次元造形装置は、例えば、廃液タンクの重さを測定するための重量センサを備え、廃液タンクの重さが一定値を越えたか否かにより、廃液タンク内における廃液の蓄積量が一定量を越えたか否かを判定している。また、液面の高さが一定レベルを越えたか否かを測定することができるフロートセンサを設けて、廃液タンク内の蓄積量が一定量を越えたか否かを判定することにより、廃液タンクの溢れを未然に検知することも考えられる。しかし、これらのセンサは経時変化により、検出精度が極端に低下し、或いは、故障が生じることがあるため、廃液の蓄積量が一定量を越えても正しく検知されずに、廃液が廃液タンクから溢れ出てしまうという可能性があった。
【0007】
そこで、異なる種類のセンサを2つ以上、例えば、重量センサに加え、別途、フロートセンサなどのセンサを設けることにより、一方のセンサに故障が生じたとしても、他方のセンサを用いて廃液タンクの溢れを未然に検知することが考えられる。しかしながら、タンク溢れを検知するためのセンサを2個以上別個に用意するのは、造形装置の製造コストが増大し、また、装置構成が複雑化してしまうという問題があった。
【0008】
本発明は、上記事情に鑑みてなされたものであり、製造コストの増大を抑制しつつ、廃液タンク内における廃液の蓄積量が一定量を越えたことを確実に検知することができる3次元造形装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
第1の本発明による3次元造形装置は、造形ステージ上に造形材ノズルから造形材を吐出させ、かつ、吐出された造形材を硬化させて所定の厚みを有する造形材の層を形成する動作を繰り返すことにより、当該造形材の層を積層して造形を行う3次元造形装置であって、上記造形材を吐出するための造形材吐出手段と、上記造形材を硬化させるための硬化手段と、上記造形材が流動可能な状態でこれを上面から回転しながら押圧して、当該造形材の余剰分を掻き取るためのローラー部と、上記造形材吐出手段、上記硬化手段及び上記ローラー部を支承するヘッドユニットと、上記ヘッドユニットを少なくとも主走査方向に往復走査させるためのヘッド駆動手段と、上記ヘッドユニットと上記造形ステージとの高さ方向の相対位置を移動させるための垂直駆動手段と、上記ヘッド駆動手段及び上記垂直駆動手段を制御するとともに、上記造形材吐出手段による上記造形材の吐出及び上記硬化手段による硬化を制御する造形制御手段と、上記ヘッドユニットの可動エリア内であって、かつ、上記造形ステージに隣接して設けられ、上記造形材吐出手段の目詰まりを防止するために上記造形材を強制的に吐出するパージ処理の際に、当該吐出された造形材を一時的に収容するパージトレイと、上記パージトレイに一時的に収容された廃液を蓄積するための廃液タンクと、上記廃液タンク内に蓄積された廃液の蓄積量を検出するための蓄積量検出センサと、一端が上記廃液タンク内に配設され、他端が上記パージトレイに接続された廃液管と、上記廃液管を介して、上記パージトレイ内の廃液を上記廃液タンクへ流入させる廃液ポンプと、上記廃液ポンプよりも上記廃液タンク側において、上記廃液管内の圧力を測定する圧力センサと、上記廃液ポンプを上記パージトレイ内の廃液を上記廃液タンクへ流入させる方向とは逆方向に動作させた際における上記圧力センサの出力に基づいて、上記廃液タンク内の液面が上記廃液管の一端に到達したことを検出する液面検出手段と、上記液面検出手段の検出結果又は上記蓄積量検出センサの検出結果に基づいて、上記廃液タンク内における廃液の蓄積量が一定量を越えたか否かを判定する蓄積量判定手段とを備えて構成される。
【0010】
一般に、廃液管の一端が液面下にあって、廃液を吸引する場合と、廃液管の一端が液面上にあって、空気を吸引する場合とでは、廃液管内の圧力が大きく異なる。この様な原理を利用して、廃液タンク内の液面が廃液管の一端に到達したことを検出することにより、廃液タンク内における廃液の蓄積量が一定量を越えたことを確実に検知することができる。また、廃液タンク内の液面が廃液管の一端に到達したか否かによって、廃液タンク内の蓄積量が一定量を越えたか否かを検知することができ、別途タンク溢れを検知するためのセンサを設ける必要がなくなり、製造コストの増大を抑制することができる。
【0011】
第2の本発明による3次元造形装置は、上記構成に加え、上記廃液ポンプの正回転時に、上記圧力センサによって測定された上記廃液管内の圧力を正の第1判定閾値と比較する第1比較手段と、第1比較手段の比較結果に基づいて、上記廃液管の詰まりを検出する詰まり検出手段と、上記廃液ポンプの逆回転時に、上記圧力センサによって測定された上記廃液管内の圧力を負の第2判定閾値と比較する第2比較手段とを備え、上記液面検出手段が、第2比較手段の比較結果に基づいて、上記廃液タンク内の液面が上記廃液管の一端に到達したことを検出するように構成される。
【0012】
この3次元造形装置では、廃液ポンプよりも廃液タンク側における廃液管内の圧力を測定することにより、廃液管の詰まり検出と、液面検出とを行っている。つまり、廃液管の詰まり検出用の圧力センサを用いて、廃液タンク内の液面が廃液管の一端に到達したことを検出している。このため、廃液タンク内における廃液の蓄積量が一定量を越えたことを検知するためのセンサを別個に用意する場合に比べて、製造コストの増大を抑制することができる。
【0013】
第3の本発明による3次元造形装置は、上記構成に加え、上記ローラー部で掻き取られた造形材からなる廃液を一時的に収容するローラードレイントレイを備え、上記廃液管が、上記廃液ポンプと上記圧力センサとの間に分岐部を備え、上記分岐部と上記パージトレイとを結ぶ第1廃液管と、上記分岐部と上記ローラードレイントレイとを結ぶ第2廃液管と、上記分岐部と上記廃液タンクとを結ぶ第3廃液管とからなり、上記廃液ポンプが、上記第1廃液管を介して、上記パージトレイ内の廃液を上記廃液タンクへ流入させる第1廃液ポンプと、上記第2廃液管を介して、上記ローラードレイントレイ内の廃液を上記廃液タンクへ流入させる第2廃液ポンプとからなるように構成される。
【0014】
第4の本発明による3次元造形装置は、上記構成に加え、上記第1廃液ポンプよりも上記パージトレイ側において、上記第1廃液管内の圧力を測定する第1圧力センサと、上記第2廃液ポンプよりも上記ローラードレイントレイ側において、上記第2廃液管内の圧力を測定する第2圧力センサとを備え、上記詰まり検出手段が、上記第1圧力センサの測定値に基づいて上記第1廃液ポンプ及び上記パージトレイ間の詰まりを検出し、上記第2圧力センサの測定値に基づいて上記第2廃液ポンプ及び上記ローラードレイントレイ間の詰まりを検出するように構成される。
【0015】
第5の本発明による3次元造形装置は、上記構成に加え、上記廃液ポンプが、逆回転時の回転速度が正回転時よりも速くなるように構成される。この様な構成によれば、廃液管の一端が液面下にある場合における廃液管内の圧力を廃液管の一端が液面上にある場合に比べて十分に低くすることができ、廃液タンク内の蓄積量が一定量を越えたか否かの検出精度を向上させることができる。
【0016】
第6の本発明による3次元造形装置は、上記構成に加え、上記蓄積量検出センサが、上記廃液タンクの重さを測定する重量センサであり、上記蓄積量判定手段が、上記液面検出手段の検出結果及び上記重量センサの出力に基づいて、上記廃液タンク内における廃液の蓄積量が一定量を越えたか否かを判定するように構成される。
【0017】
この様な構成によれば、圧力センサ又は重量センサのいずれかに不具合が生じた場合であっても、廃液タンク内の蓄積量が一定量を越えたことを正しく検知することができ、検出精度を向上させることができる。
【0018】
第7の本発明による3次元造形装置は、造形ステージ上に造形材ノズルから造形材を吐出させ、かつ、吐出された造形材を硬化させて所定の厚みを有する造形材の層を形成する動作を繰り返すことにより、当該造形材の層を積層して造形を行う3次元造形装置であって、上記造形材を吐出するための造形材吐出手段と、上記造形材を硬化させるための硬化手段と、上記造形材が流動可能な状態でこれを上面から回転しながら押圧して、当該造形材の余剰分を掻き取るためのローラー部と、上記造形材吐出手段、上記硬化手段及び上記ローラー部を支承するヘッドユニットと、上記ヘッドユニットを少なくとも主走査方向に往復走査させるためのヘッド駆動手段と、上記ヘッドユニットと上記造形ステージとの高さ方向の相対位置を移動させるための垂直駆動手段と、上記ヘッド駆動手段及び上記垂直駆動手段を制御するとともに、上記造形材吐出手段による上記造形材の吐出及び上記硬化手段による硬化を制御する造形制御手段と、上記ローラー部で掻き取られた造形材からなる廃液を一時的に収容するローラードレイントレイと、上記ローラードレイントレイに一時的に収容された廃液を蓄積するための廃液タンクと、上記廃液タンク内に蓄積された廃液の蓄積量を検出するための蓄積量検出センサと、一端が上記廃液タンク内に配設され、他端が上記ローラードレイントレイに接続された廃液管と、上記廃液管を介して、上記ローラードレイントレイ内の廃液を上記廃液タンクへ流入させる廃液ポンプと、上記廃液ポンプよりも上記廃液タンク側において、上記廃液管内の圧力を測定する圧力センサと、上記廃液ポンプを上記ローラードレイントレイ内の廃液を上記廃液タンクへ流入させる方向とは逆方向に動作させた際における上記圧力センサの出力に基づいて、上記廃液タンク内の液面が上記廃液管の一端に到達したことを検出する液面検出手段と、上記液面検出手段の検出結果又は上記蓄積量検出センサの検出結果に基づいて、上記廃液タンク内における廃液の蓄積量が一定量を越えたか否かを判定する蓄積量判定手段とを備えて構成される。
【発明の効果】
【0019】
本発明による3次元造形装置では、廃液タンク内における廃液の蓄積量が一定量を越えたことを確実に検知することができる。すなわち、仮に重量センサなどの廃液タンク内の蓄積量を検出するためのセンサに検出精度の低下や、故障が発生した場合であっても、廃液タンク内における廃液の蓄積量を検知することができるので、廃液タンクから廃液が溢れ出てしまうことを確実に防止することができる。
【0020】
また、廃液管の詰まり検出用の圧力センサを用いて、廃液タンク内の液面が廃液管の一端に到達したことを検出することにより、廃液タンク内の蓄積量が一定量を越えたことを検知するためのセンサを別個に用意する場合に比べて、製造コストの増大を抑制することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の実施の形態による3次元造形装置10を含む造形システム100の一構成例を示したシステム図である。
【図2】図1の3次元造形装置10の一構成例を示した斜視図であり、作業空間110及びカートリッジ収容部130内の様子が示されている。
【図3】図2のヘッドユニット111の概略構成の一例を示した図であり、ヘッドユニット111をx,y,z方向から見た様子が示されている。
【図4】図2の3次元造形装置10における造形時の動作の一例を模式的に示した説明図であり、造形ステージ112上に立体造形物が形成される様子が示されている。
【図5】図2の3次元造形装置10における造形時の動作の一例を模式的に示した説明図であり、x方向の主走査往路及び主走査復路の様子が示されている。
【図6】廃液を一時的に収容するパージトレイ114及びローラードレイントレイ343の構成例を示した図である。
【図7】パージトレイ114やローラードレイントレイ343内の廃液を廃液タンク13Hへ流入するための廃液ポンプ60の構成例を示した断面図である。
【図8】図2の廃液タンク13Hの構成例を示した断面図であり、廃液タンク13Hをzx面に平行な鉛直面で切断した場合の切断面が示されている。
【図9】図2の3次元造形装置10における動作の一例を示した図であり、造形処理中のモニター画面21が示されている。
【図10】パージトレイ114及びローラードレイントレイ343から廃液タンク13Hまで廃液を移送する廃液移送経路の一例を示したブロック図である。
【図11】廃液ポンプ60aを逆回転させた際に、圧力センサ93により測定される圧力の変化を示した図である。
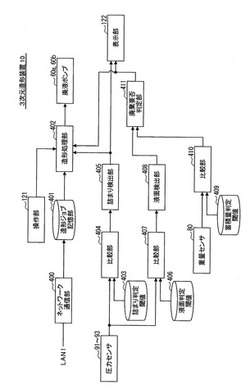
【図12】図1の3次元造形装置10内の機能構成の一例を示したブロック図である。
【図13】図12の3次元造形装置10における造形処理時の動作の一例を示したフローチャートである。
【図14】図12の3次元造形装置10における造形処理時の動作の一例を示したフローチャートである。
【発明を実施するための形態】
【0022】
まず、本発明による3次元造形装置が前提とするインクジェット方式の造形装置の概略構成について、図1〜図5を用いて説明する。
【0023】
<造形システム100>
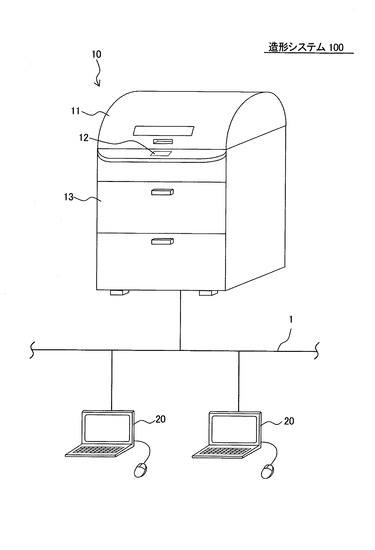
図1は、本発明の実施の形態による3次元造形装置10を含む造形システム100の一構成例を示したシステム図である。この造形システム100は、3次元造形装置10と、LAN(Local Area Network)1を介して3次元造形装置10に接続された複数の造形依頼者端末20により構成される。
【0024】
3次元造形装置10は、インクジェット方式の積層型造形機であり、所定のUV硬化樹脂を造形材として用い、後述する造形ステージ上に造形材からなる造形材層を順に積層形成することによって所望の立体造形物を形成する。造形依頼者端末20は、3次元造形用のアプリケーションプログラムがインストールされたPC(パーソナルコンピュータ)であり、所望の立体造形物を作製するための造形データを生成する造形データ作成装置として機能する。
【0025】
造形データは、造形対象物の3次元形状を示す形状情報と、形状情報以外の造形条件とからなる。造形データは、例えば、CADデータに基づいて作成され、必要に応じて、3次元造形装置10で用いられる積層データとして、各層単位でのデータに加工される。但し、層単位でのデータ加工は、3次元造形装置10側で行われても良い。形状情報以外の造形条件とは、造形対象物に関わらず指定することが可能な造形情報のことであり、造形材の種類、造形材層の厚さ、走査速度などの造形パラメータと、造形ステージ上における造形対象物の配置態様を示す配置情報とからなる。
【0026】
造形依頼者端末20において作成された造形データは、3次元造形装置10へ送信される。3次元造形装置10では、LAN1を介して造形依頼者端末20から受信した複数の造形データが造形ジョブとして管理される。すなわち、造形ジョブは、造形データと、造形データに関連付けて保持される属性情報とからなる。この属性情報には、造形データの識別情報、造形データの送受信日時、造形依頼者の識別情報などが含まれる。造形依頼者端末20は、この様な造形処理の依頼者が使用する端末装置である。
【0027】
この3次元造形装置10には、上部扉11、操作表示部12及び前面扉13が設けられている。上部扉11は、外部から後述する作業空間110へアクセスするのを規制し、また、造形材などが外部空間へ飛散するのを防止するための開閉可能な遮断扉であり、手前側を持ち上げることにより、作業空間110へアクセスすることができる。操作表示部12は、例えば、タッチパネルからなり、ユーザによる操作を受け付け、また、動作状態や各種のエラーメッセージを画面表示する。前面扉13は、造形材カートリッジなどを収容するカートリッジ収容部130用の開閉扉であり、上部を手前側へ移動させることにより、後述するカートリッジ収容部130へアクセスすることができる。
【0028】
<3次元造形装置10>
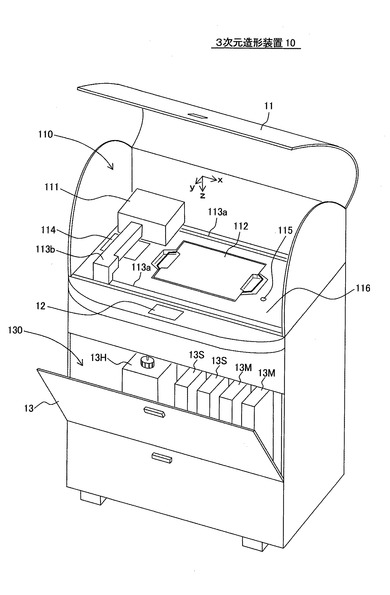
図2は、図1の3次元造形装置10の一構成例を示した斜視図であり、作業空間110及びカートリッジ収容部130内の様子が示されている。図中には、上部扉11及び前面扉13を開扉した状態の3次元造形装置10が示されている。
【0029】
作業空間110は、造形材を吐出するヘッドユニット111を2次元走査させ、また、ヘッドユニット111から吐出した造形材を造形ステージ112上に堆積させるための空間であり、作業台としての天板116上に形成されている。この天板116には、ヘッドユニット111を主走査方向であるx方向に駆動させる際にヘッドユニット111をガイドする一対のx走査用係合溝113aと、ヘッドユニット111を副走査方向であるy方向に駆動させる際にヘッドユニット111をガイドするy走査用ガイド機構113bと、パージトレイ114及び受光孔115が配置されている。なお、ヘッドユニット111は、一方のx走査用係合溝113aに沿って作業台近傍に設けられる図示しない駆動手段によってx走査方向に往復動されるようになっている。
【0030】
造形ステージ112は、水平で平坦な造形面を有し、造形面上に造形材を堆積させ、立体造形物を形成するための可動ステージであり、鉛直方向に移動させることができる。この造形ステージ112は、天板116の中央に配置されている。ヘッドユニット111は、図示しない駆動装置によって、造形ステージ112と平行に2次元走査される可動ユニットである。
【0031】
この3次元造形装置10では、鉛直方向をz方向とし、互いに直交する水平方向をxy方向とすれば、ユーザから見て左右方向となるx方向を主走査方向とし、ユーザから見て前後方向となるy方向を副走査方向として、2次元走査が行われる。造形材は、主走査方向の走査時に吐出される。また、ヘッドユニット111は、上記2次元走査により、矩形エリア内の任意の位置に移動させることができ、当該矩形エリアが可動エリアとなる。
【0032】
また、言い換えれば、ここでのy方向とは、後述するモデル材用ノズルユニット32及びサポート材用ノズルユニット31の各々が有する複数のオリフィス(後述する吐出口2)が配列した並び方向であり、x方向は水平面内においてこのy方向と直交する方向である。
【0033】
x走査用係合溝113aは、ヘッドユニット111を主走査方向へ走査する駆動装置と係合させるための溝であり、天板116の前端部及び後端部に形成されている。パージトレイ114は、ヘッドユニット111から排出された造形材を使用済み造形材として一時的に収容する容器であり、その様な使用済み造形材からなる造形材液が廃液として保持される。パージトレイ114は、ヘッドユニット111の可動エリア内であって、造形ステージ112よりも左側に配置されている。
【0034】
3次元造形装置10では、造形処理中において、定期的にパージ処理が行われる。パージ処理は、ヘッドユニット111を造形エリアとしての造形ステージ112上からパージトレイ114上に移動させ、ヘッドユニット111に搭載されている造形材ノズル312,322から造形材を強制的に吐出させることにより、造形材を吐出するための吐出口2や、吐出口2に造形材を供給するための造形材供給経路内に残留する残留物を除去するとともに、造形材ノズル312,322の表面に、図示しないゴム部材を当接させ、摺動させることにより、造形材ノズル表面を清掃する処理である。ここで、ノズルから吐出された造形材は、後述する廃液タンク13Hに回収されるようになっている。
【0035】
受光孔115は、造形材を硬化させるためのUV光の照度を検出する照度センサ用の受光窓であり、天板116に形成された貫通孔からなる。この受光孔115は、造形ステージ112を挟んでパージトレイ114とは反対側に配置されている。また、具体的な動作としては、操作表示部12に設けられるランプユニット35の照度検査スイッチを押下し、ヘッドユニット111を駆動させることにより、自動的に受光孔115の真上に位置させ、ランプユニット35を点灯させ、UV光の照度を、受光孔115の内部に設けられる照度センサにより検出させる。
【0036】
カートリッジ収容部130内には、2つのモデル材カートリッジ13Mと、2つのサポート材カートリッジ13Sと、廃液タンク13Hが収容されている。ヘッドユニット111から吐出される造形材には、造形対象物自体を構成するモデル材Mと、造形対象物のオーバーハング部分や孤立部分を支持し、最終的には除去されるサポート材Sとがある。
【0037】
本実施例では、サポート材Sは、モデル材Mに比べ、サポート材Sを除去するための水に対する溶解性の高い材料が含まれている。なお、ここでのオーバーハング部分とは、造形物がz方向(つまり高さ方向)において下方に位置する造形部分よりx−y平面で張り出した部分を意味し、言い換えれば、オーバーハング形状を有する造形物とは、既に成形されたモデル材のスライスが存在しない部分の上表面に新たなモデル材のスライスが成形される部分(オーバーハング部)を有する造形物である。
【0038】
モデル材カートリッジ13Mは、使用前のモデル材Mを収容する着脱式の造形材タンクである。サポート材カートリッジ13Sは、使用前のサポート材Sを収容する着脱式の造形材タンクである。つまり、モデル材カートリッジ13Mやサポート材カートリッジ13Sには、ヘッドユニット111の造形材ノズル312,322から吐出させる前の造形材が収容される。
【0039】
廃液タンク13Hは、パージトレイ114や後述するヘッドユニット111内のローラードレイントレイ(後述)から回収された廃液を蓄積するための貯留容器であり、取り外して交換することができる。なお、廃液タンク13Hには、内部に液面検出用のセンサや、廃液タンク13H自体の重量を検出する重量センサなどを設けることにより、廃液タンク13H内の廃液の程度を検出し、オペレータに通知する機能を搭載している。
【0040】
カートリッジ収容部130内には、2個のモデル材カートリッジ13Mと、2個のサポート材カートリッジ13Sとが収容可能であり、両カートリッジを交互に使用することにより、造形処理を中断させることなく空になったカートリッジを交換することができる。
【0041】
<ヘッドユニット111>
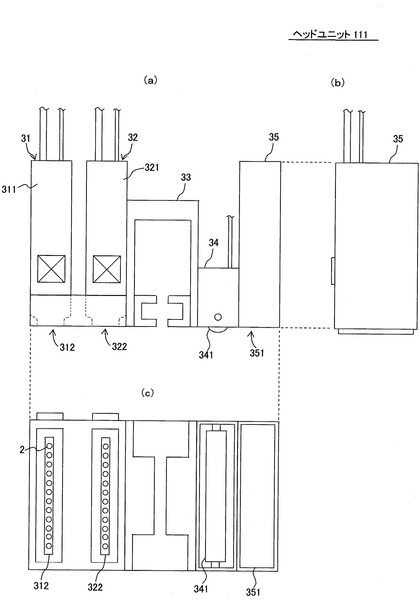
図3は、図2のヘッドユニット111の概略構成の一例を示した図であり、図中の(a)には、ヘッドユニット111をy方向(ヘッドユニット111の副走査方向)から見た様子が示され、(b)には、x方向(ヘッドユニット111の主走査方向)から見た様子が示され、(c)には、z方向から見た様子が示されている。
【0042】
このヘッドユニット111は、サポート材用ノズルユニット31、モデル材用ノズルユニット32、y走査用ホルダユニット33、ローラーユニット34及びランプユニット35により構成され、これらのユニット31〜35を一体的に保持している。ユニット31〜35は、この順に、x方向に配列されている。
【0043】
なお、x軸方向に沿うサポート材用ノズルユニット31、モデル材用ノズルユニット32、ローラーユニット34及びランプユニット35の配列の基本的な考え方は、以下の通りである。ヘッドユニット111の主走査方向の往路方向をベースに考えると、サポート材用ノズルユニット31、モデル材用ノズルユニット32は、いずれか一方が他方の前方に位置すればよい。このようなノズルユニットのレイアウトに対して、ローラーユニット34ならびにランプユニット35は、ローラーの作用を往路で行いたい場合は、往路進行方向において、サポート材用ノズルユニット31、モデル材用ノズルユニット32の後方にローラーユニット34、ランプユニット35の順で配置し、ローラーの作用を復路で行いたい場合は、サポート材用ノズルユニット31、モデル材用ノズルユニット32の復路の進行方向において後方にローラーユニット34、ランプユニット35の順で配置すればよい。
【0044】
また、上記実施例においては、ヘッドユニット111から新たな最上層となるための樹脂を吐出させた後、造形途中の未硬化状態の最上層の樹脂層に対して、ローラーユニット34による余剰樹脂の掻き取りを行った後、ランプユニット35によって少なくとも最上層の樹脂層に対する硬化のためのUV光を照射する方法を採用した。
【0045】
しかし、これ以外にも、ヘッドユニット111から新たな最上層となるための樹脂を吐出させた後、余剰樹脂層を含む最上層に対して、ランプユニット35によって一旦光を照射した後、造形途中の未硬化状態の最上層の樹脂層に対して、ローラーユニット34による余剰樹脂の掻き取りを行い、その後再度ランプユニット35によって少なくとも最上層の樹脂層に対する硬化のためのUV光を照射する方法もある。
【0046】
この場合、ランプユニット35は、ヘッドユニット111において、x方向、つまりヘッドユニット111の主走査方向で、サポート材用ノズルユニット31、モデル材用ノズルユニット32を挟む前後方向に一対のランプユニット35を設けることにより、上述のような二度の照射を行うことができる。また、この場合、一度目の照射と二度目の照射を合わせて、最終的に所望する樹脂の硬化の程度を達成するようになるため、一度目の照射後の樹脂は硬化状態ではなく、まだその後のローラーユニット34による掻き取り動作のために、流動可能な、半硬化状態である。このため、この場合においても、ローラーユニット34による樹脂の掻き取り前の最上層の状態は、未硬化または流動可能な状態と表現することとする。
【0047】
モデル材用ノズルユニット32は、モデル材カートリッジ13Mから供給されるモデル材Mを吐出するためのノズルユニットであり、モデル材Mを一時的に収容するリザーブタンク321と、造形ステージ112に対しモデル材Mを吐出する複数の吐出口2がy方向に配列された造形材ノズル322からなる。
【0048】
サポート材用ノズルユニット31は、サポート材カートリッジ13Sから供給されるサポート材Sを吐出するためのノズルユニットであり、サポート材Sを一時的に収容するリザーブタンク311と、サポート材Sを吐出する複数の吐出口2がy方向に配列された造形材ノズル312からなる。
【0049】
モデル材Mやサポート材Sは、造形材ノズル322ならびに312の各々に設けられる吐出口2ごとにノズルユニット内に設けられる圧電素子の振動を利用することにより、吐出口2から液滴となって射出される。吐出口2は一定ピッチでy方向において直線上に配置されている。
【0050】
ヘッドユニット111は、造形材ノズル312,322から造形材を吐出させながらx方向に走査することにより、造形材ノズル312,322の各々に設けられる全ての吐出口2の配列長さに対応する所定幅の造形材層を1回の主走査によって造形ステージ112上に形成することができる。
【0051】
y走査用ホルダユニット33は、ヘッドユニット111を副走査方向へ走査するために、x走査用係合溝113間を結ぶ橋梁体に支持されている。このy走査用ホルダユニット33が上記橋梁体に支持されるとともに、橋梁体上に設けられる図示しない駆動部により、橋梁体に設けられる図示しないy方向(ヘッドユニット111の副走査方向)に延びる軸に沿ってヘッドユニット111を駆動する構造となっている。なお、ヘッドユニット111のy方向(ヘッドユニット111の副走査方向)の駆動方式としては、ヘッドユニット111自体に駆動部を内蔵させ、上述した軸上を移動させるようにしてもよい。
【0052】
ローラーユニット34は、膜厚調整用ローラー341と、このローラー341を回転させる駆動部(図示せず)と、膜厚調整用ローラー341によって造形ステージ112上に形成される造形材層の最表面から掻き取られた造形材を使用済み造形材として一時的に収容するローラードレイントレイ(後述)からなる。
【0053】
膜厚調整用ローラー341は、造形ステージ112上に吐出し堆積させた造形材膜の厚さを調整する。より詳細に説明すれば、膜厚調整用ローラー341は、造形材ノズル312,322から吐出された造形材にて形成された最表面層の一部を、ランプユニット35にて硬化させる前に所定の厚みを掻き取ることにより、最表面層の厚みの最適化を図っている。また、膜厚調整用ローラー341は、造形材膜の表面を平坦化するためのローラーでもあり、y方向の回転軸を中心として回転する。より詳細に説明すれば、膜厚調整用ローラー341が作用する際のヘッドユニット111の進行方向に対して、膜厚調整用ローラー341は、順方向に回転する。膜厚調整用ローラー341にて掻き取られ、上記ローラードレイントレイ内に収容された造形材は、使用済み造形材からなる廃液として廃液タンク13Hへ送られる。
【0054】
ランプユニット35は、造形ステージ112上に吐出し堆積させた造形材膜にUV光を照射するためのUVランプ351からなり、吐出口2の配列長さよりも幅が広い照射エリアを造形ステージ112上に形成することができる。
【0055】
図3に示すランプユニット35のレイアウトを採用した場合は、図の左から右にヘッドユニット111を移動させる、いわゆる主走査の往路においては、ランプユニット35は、造形材ノズル312,322よりも先行した位置に配置されるため、往路に吐出した造形物の表面にUV光を照射することがない。従って、点灯制御を容易化するため、常時点灯していてもよい。実際のUV光の照射は、復路において、膜厚調整用ローラー341が造形物の最表面の厚みを適正化した後の最表面に対して行われることとなる。
【0056】
なお、ここでのランプユニット35は、UV光を照射する光源であれば、UV光照射用ランプに限る必要はなく、UV光を照射するLED光源も含むものである。つまり、UV光などの樹脂硬化に必要な特定波長の光を照射する樹脂硬化用の光照射手段である。更に、光硬化型の樹脂に代えて、造形用樹脂として所定の温度によって硬化するような熱可塑性樹脂を採用するのであれば、本発明のランプユニット35に代えて、樹脂硬化手段として、冷却または加熱手段を採用したり、場合によっては、不要な場合もある。
【0057】
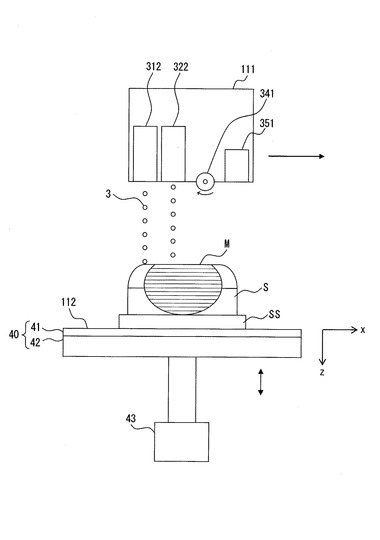
<造形処理>
図4は、図2の3次元造形装置10における造形時の動作の一例を模式的に示した説明図であり、造形ステージ112上に立体造形物が形成される様子が示されている。図中には、立体造形物を造形中の3次元造形装置10におけるヘッドユニット111及び造形ステージ112をzx面に平行な鉛直面で切断した場合の切断面の様子が示されている。
【0058】
モデル材M及びサポート材Sは、造形ステージ112に対し、主走査方向(x方向)の走査中にヘッドユニット111から下方へ液滴3となって吐出される。主走査往路時に造形ステージ112上に吐出し堆積させたこれらの造形材からなる造形材層は、主走査復路において、膜厚調整用ローラー341により膜厚が調整され、UVランプ351によるUV光の照射によって硬化する。なお、上記の説明では、モデル材M及びサポート材Sの吐出を、主走査の往路方向にて行うと共に、ヘッドユニット111の主走査の復路において行っても良い。また、モデル材M及びサポート材Sの吐出を、ヘッドユニット111の主走査の復路単独で行ってもよい。
【0059】
本実施の形態におけるモデル材M及びサポート材Sは、共にUV硬化性の樹脂であり、同一のUVランプ351によりUV光が照射されることにより硬化する。なお、3次元造形装置10に使用可能な樹脂としては、光硬化性の樹脂の他に、熱を与えて硬化させる熱硬化性の樹脂や、自然冷却により硬化する熱可塑性樹脂を用いることもできる。
【0060】
ヘッドユニット111のy方向の長さ(ヘッド幅)に対応する一定幅の帯状領域は、フィールドと呼ばれ、あるフィールドについて、造形材層の形成が完了すれば、ヘッドユニット111を副走査方向(y方向)へ移動させ、隣接するフィールドに対する造形材層の形成が開始される。どの程度ヘッドユニット111を副走査方向(y方向)へ移動させるかは、造形ステージ112上にて形成する造形物をどのような位置に配置させるかによって決定され、その決定は、造形依頼者端末20における依頼者の入力に基づいて行われる。
【0061】
ヘッドユニット111は、x走査用係合溝113間をy方向に跨ぐ門型の橋梁体に支持され、一対のx走査用係合溝113に沿って主走査方向に走査される。なお、本実施の形態では、門型の橋梁体にヘッドユニット111を支持させ、一対のx走査用係合溝113に沿ってヘッドユニット111を主走査方向に移動させる構成としたが、x走査用係合溝113を1本とし、ヘッドユニット111を片持ちで支持した状態で主走査方向に移動させる構成としても良い。
【0062】
ヘッドユニット111に配設されたモデル材用ノズルユニット32及びサポート材用ノズルユニット31により造形可能なy方向の幅は造形ステージ112上の造形エリアに対して短いため、ヘッドユニット111を主走査方向へ往復移動させて1フィールド分の造形が完了すると、ヘッドユニット111を副走査方向(y方向)に移動させて隣接するフィールドの造形が行われる。ユーザが設定した立体造形物が1フィールド内に収まる場合には、ヘッドユニット111の副走査方向への移動は行われない。なお、ヘッドユニット111による造形可能なy方向の幅が造形ステージ112上の造形エリアのy方向の幅よりも同一又は大きい場合には、ヘッドユニット111は副走査方向へ移動させながら造形する必要はなく、副走査方向への移動機構は不要となる。
【0063】
造形ステージ112上には、上述したヘッドユニット111の主走査及び副走査によって造形材層がフィールドごとに形成され、立体造形物を構成する1つの樹脂層が形成される。この樹脂層は、スライス層と呼ばれ、あるz方向の位置でスライス層の形成が完了すれば、造形ステージ112をスライス層の厚さに相当する距離だけ下方向(z方向)へ移動させ、次のスライス層の形成が開始される。
【0064】
この3次元造形装置10では、着脱可能な可搬プレート41の上面が造形ステージ112であり、可搬プレート41と、可搬プレート41が載置されるプレート取付台42とから、z方向に移動可能なz移動ユニット40が構成される。z移動ユニット40は、z駆動装置43によりz方向の位置が調整される。z駆動装置43は、ヘッドユニット111と造形ステージ112との間の高さ方向の相対位置を変化させる垂直駆動手段である。可搬プレート41は、矩形状の金属板からなり、造形依頼者端末20から指示した全ての造形が完了した時点で、立体造形物を載せたままの状態で、プレート取付台42から取り外すことができる。プレート取付台42には、可搬プレート41を固定するための固定機構(図示せず)が設けられる。
【0065】
立体造形物は、モデル材Mによって構成され、サポート材Sは、立体造形物のオーバーハング部分や孤立部分を支持し、最終的には所定の方法によって除去される。例えば、モデル材Mとして、水に対し不溶性又は難溶性の樹脂を用い、サポート材Sとして、易溶性の樹脂を用いれば、可搬プレート41上に形成された造形物を取り出して水に浸すことにより、サポート材Sからなる造形材層だけを容易に除去することができる。また、言うまでもなく、造形物としてのモデル材Mからサポート材Sの除去は、従来通り、手を用いてモデル材Mからサポート材Sを外すようにしても良い。
【0066】
この例では、可搬プレート41上に形成された下地層SS上にモデル材M及びサポート材Sからなるスライス層を積層形成することによって所望の立体造形物が形成される。下地層SSは、可搬プレート41の傾きや表面の凹凸を吸収し、また、造形物を剥離し易くするサポート材Sからなる。さらに、この下地層SSは、可搬プレート41の傾きや表面の凹凸を吸収できるのであれば、造形依頼者端末20における造形条件において、中実の構造以外に格子状などの中空構造を採用することにより、材料の使用量の低減を図ることもできる。
【0067】
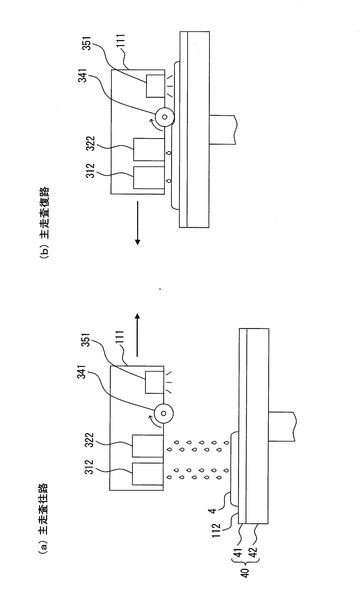
<主走査>
図5は、図2の3次元造形装置10における造形時の動作の一例を模式的に示した説明図であり、図中の(a)には、x方向の主走査往路の様子が示され、(b)には、主走査復路の様子が示されている。主走査往路では、z方向に関して造形ステージ112の位置がヘッドユニット111から離間した位置に固定され、モデル材Mやサポート材Sが造形材ノズル312,322から吐出される。造形ステージ112上には、これらの造形材からなる造形材層4が形成される。
【0068】
なお、図5(a)に開示するヘッドユニット111と造形ステージ112との間の距離と、図5(b)に開示するヘッドユニット111と造形ステージ112との間の距離とは明らかに異なるように示しているが、これは動作の内容をわかりやすく説明するためであり、実際は、図5(a)の状態でのヘッドユニット111と造形ステージ112との間の距離は2mm以下であり、図5(b)におけるその距離は、図5(a)の状態から造形ステージ112をz方向で且つヘッドユニット111に近づくように1mm以下の距離を移動させるようになっている。
【0069】
造形材層4の厚みはユーザが造形精度や造形速度の観点から決定することができる。つまり、ユーザが造形精度を優先することを選択すれば、造形材層4の厚みは設定可能な最小の厚み又はその近傍の厚みに設定し、造形速度を優先することを選択すれば、最低限の造形精度を維持した厚みに設定すればよい。このような選択は、造形依頼者端末20において形状情報以外の造形条件として選択、設定することができるようになっている。
【0070】
主走査復路の走査は、膜厚調整用ローラー341が造形材層4と接触する位置まで造形ステージ112を上方へ移動させた状態で行われる。この主走査復路では、主走査往路での造形材の吐出に加え、モデル材Mやサポート材Sが造形材ノズル312,322から吐出させることも可能であり、主走査往路や復路で吐出し堆積させた造形材層4の上層部が膜厚調整用ローラー341によって掻き取られる。
【0071】
造形材ノズル312,322に配設された各ノズルからの造形材の吐出量には個体差があり、また、予め設定された厚みの造形材層4が正確に得られるように、造形材ノズル312,322からの造形材の吐出量を制御するのは困難であるため、少なくとも各造形層を形成する単位で、造形材ノズル312,322からは設定された厚み以上の造形材を吐出し、余分な造形材を膜厚調整用ローラー341により掻き取って回収することで、予め設定された厚みの造形材層4を維持し、均一な厚みの造形材層4を積層することができる。但し、膜厚調整用ローラー341を、その時点での造形層の最表面に当接させるタイミングは、造形データとしての各スライス層データ単位での最表面で行う必要はなく、造形の種々の狙い、例えば、造形精度と造形速度の両立の観点から、必要なタイミングにて行うことができる。
【0072】
膜厚調整用ローラー341は、主走査の往路及び復路に関わらず、一定の回転数で同じ向きに回転する。UVランプ351は、造形材の種類や造形材層4の厚さ、x方向の走査速度に応じた所定の光度で点灯し、主として、膜厚調整用ローラー341による膜厚調整後の造形材層4をUV光の照射によって硬化させる。
【0073】
次に、廃液タンク13H内における廃液の蓄積量が一定量を越えたことを詰まり検出用の圧力センサを用いて検知する構成について、図6〜図14を用いて説明する。
【0074】
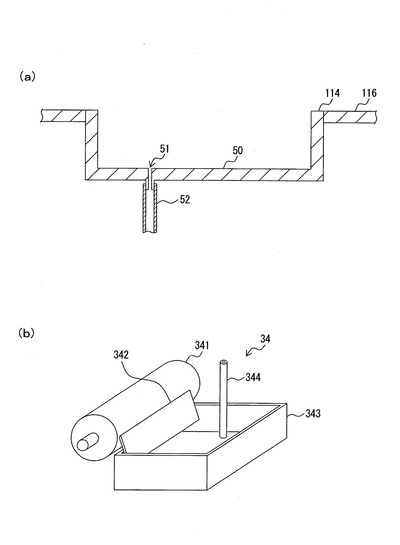
<廃液トレイ>
図6は、使用済み造形材からなる廃液を一時的に収容する廃液トレイの構成例を示した図である。図中の(a)は、図2のパージトレイ114の構成例を示した断面図であり、パージトレイ114付近をzx面に平行な鉛直面で切断した場合の切断面が示されている。このパージトレイ114は、矩形状の底板50を側壁が取り囲む形状からなる受皿部である。
【0075】
パージトレイ114の側壁は、天板116に接合され、底板50には、廃液を吸い込むための吸込口51が設けられている。また、底板50には、下面から突出する接続部が設けられ、パージトレイ114内の廃液を廃液タンク13Hへ移送するための廃液管52が接続されている。パージトレイ114内に収容された廃液は、吸込口51を介して吸引され、廃液管52内を通って廃液タンク13Hへ移送される。
【0076】
図中の(b)は、図3のヘッドユニット111におけるローラーユニット34内のローラードレイントレイ343の構成例を示した斜視図である。このローラーユニット34は、膜厚調整用ローラー341、ブレード342、ローラードレイントレイ343及び吸引パイプ344からなる。
【0077】
ブレード342は、膜厚調整用ローラー341に付着した造形材を掻き取り、ローラードレイントレイ343内へ誘導するための掻き取り部材であり、薄い板状体からなる。ローラードレイントレイ343は、ブレード342によって掻き取られた造形材を使用済み造形材として一時的に収容するための受皿部であり、使用済み造形材からなる造形材液が廃液として保持される。
【0078】
吸引パイプ344は、ローラードレイントレイ343内の廃液を吸引して廃液タンク13Hへ移送するための廃液管である。ローラードレイントレイ343内に収容された廃液は、吸引パイプ344の先端から吸引され、吸引パイプ344内を通って廃液タンク13Hへ移送される。
【0079】
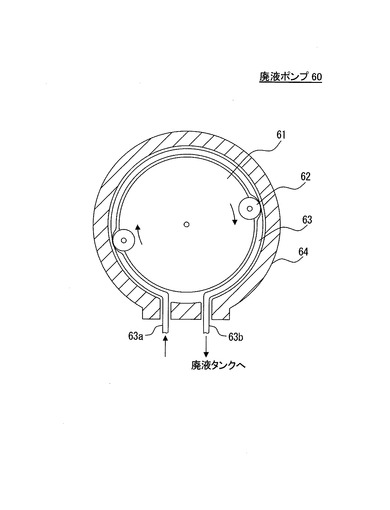
<廃液ポンプ60>
図7は、パージトレイ114やローラードレイントレイ343内の廃液を廃液タンク13Hへ流入するための廃液ポンプ60の構成例を示した断面図であり、廃液ポンプ60の正回転時の様子が示されている。この図では、ローター61の駆動部が省略されている。
【0080】
廃液ポンプ60は、正回転及び逆回転可能なローター61を有し、正回転させることにより、パージトレイ114又はローラードレイントレイ343内の廃液を廃液タンク13Hへ流入させるポンプである。その様な廃液ポンプ60には、2つのローラー62が配設されたローター61と、廃液が管内へ流入されるチューブ63と、ポンプ筐体64からなるチューブポンプが用いられる。このチューブポンプは、ローラー62によってチューブ63内の廃液を押し出す絞り出し方式のポンプである。
【0081】
ローター61は、回転軸を中心として回転する円板状の回転体であり、周面から突出するようにローラー62が配設されている。ローラー62は、その回転軸がローター61の回転軸と平行であり、ポンプ筐体64の内周面とローター61の周面との間に周面に沿って配置されたチューブ63の一部分を押し潰す。
【0082】
各ローラー62は、ローター61の回転軸を挟んで互いに反対側に配置されている。チューブ63は、ローラー62の押圧力によって弾性変形する廃液管であり、両端がポンプ筐体64から引き出されている。ローター61を回転させることにより、ローラー62がローター61とは反対方向に回転し、ローラー62によって押し潰されるチューブ63の位置が移動する。この作用により、チューブ63の一端から廃液が吸引され、他端から吐出される。
【0083】
正回転時には、チューブ63の一端が廃液の吸込口63aとなり、チューブ63の他端が廃液の吐出口63bとなる。吐出口63bを介して吐出された廃液は、廃液管を通って廃液タンク13Hへ流入する。一方、ローター61を逆回転させることにより、廃液を逆流させることができる。逆回転とは、ローター61を正回転時とは反対方向へ回転させることであり、吐出口63bから吸引された廃液は、チューブ63内を通って吸込口63aから吐出される。
【0084】
<廃液タンク13H>
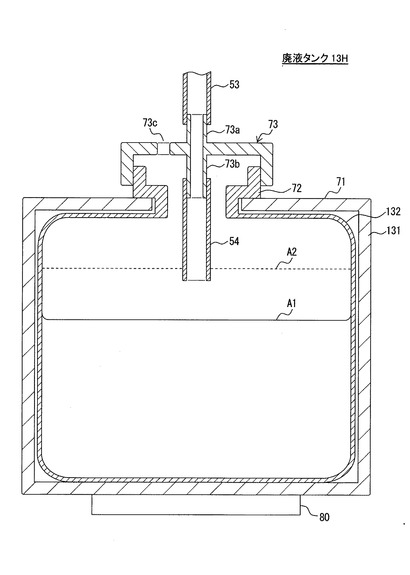
図8は、図2の廃液タンク13Hの構成例を示した断面図であり、廃液タンク13Hをzx面に平行な鉛直面で切断した場合の切断面が示されている。この廃液タンク13Hは、廃液を貯留するためのタンク本体132と、タンク本体132を収容する直方体形状のカートリッジ筐体131と、タンク本体132の注入口72に被せるためのタンクキャップ73により構成される。
【0085】
タンク本体132は、折り畳んで収納することができる袋状の容器であり、例えば、ポリエチレン又はポリプロピレン樹脂からなる。タンク本体132の容積、すなわち、タンク本体132内に収容可能な廃液の量は、パージトレイ114及びローラードレイントレイ343に比べて十分に大きい。注入口72は、鉛直上方に向けて固定される。例えば、注入口72は、カートリッジ筐体131の上板71に設けられた開口を介して引き出された注入口72の下面を上板71の上面に当接させることにより、固定される。
【0086】
タンクキャップ73は、注入口72を覆う皿状の蓋からなり、廃液管接続部73a,73b及び通気孔73cが上板に設けられている。廃液管接続部73aは、廃液ポンプ60に接続された廃液管53を接続するための係合部であり、タンクキャップ73の上面から鉛直上方へ突出する形状からなる。廃液管接続部73bは、タンク本体132内に収容される廃液管54を接続するための係合部であり、タンクキャップ73の下面から鉛直下方へ突出する形状からなる。
【0087】
廃液管53を通り、廃液管接続部73aを介して流入された廃液は、廃液管54の下端から排出され、タンク本体132内に蓄積される。通気孔73cは、タンク本体132内の空気を外部へ排出するための貫通孔からなる。
【0088】
廃液の液面A1は、タンク本体132内における廃液の蓄積量が増えるに従って上昇する。廃液管54の下端は、廃液の蓄積量が一定量以下であれば、液面A1よりも高い位置にある。一方、廃液管54の下端は、廃液の蓄積量が一定量を越えれば、液面下となる(液面A1がA2に位置する場合)。
【0089】
廃液ポンプ60のローター61を逆回転させた場合、廃液管54の下端が液面よりも下側に位置すれば、タンク本体132内の廃液が廃液管54を介して吸引される。一方、廃液管54の下端が液面よりも上側に位置すれば、タンク本体132内の空気が廃液管54を介して吸引される。
【0090】
廃液管54の下端が液面下にあって、廃液を吸引する場合と、廃液管54の下端が液面上にあって、空気を吸引する場合とでは、廃液管53,54内の圧力が大きく異なることから、廃液ポンプ60の逆回転時における廃液管53,54内の圧力を測定することにより、タンク本体132内の液面が廃液管54の下端に到達したことを検出することができる。廃液管54の長さを調節することにより、検知対象とする液面の位置を調整することができる。
【0091】
この廃液タンク13Hには、廃液タンク13Hの重さを測定し、廃液タンク13H内における廃液の蓄積量が一定量を越えたことを検知するための重量センサ80が配設されている。重量センサ80は、検出面に付加される圧力を検出する圧力センサからなり、例えば、応力によって抵抗体が変形した際の電気抵抗の変化量からひずみ量を求めて応力を検出するひずみゲージが用いられる。
【0092】
この様な重量センサ80を用いて廃液タンク13Hの重さを測定することにより、廃液タンク13H内における廃液の蓄積量が一定量を越えたことを検知することができ、廃液が廃液タンク13Hの通気孔73cを介して溢れ出ることを事前に認識することができる。
【0093】
<モニター画面21>
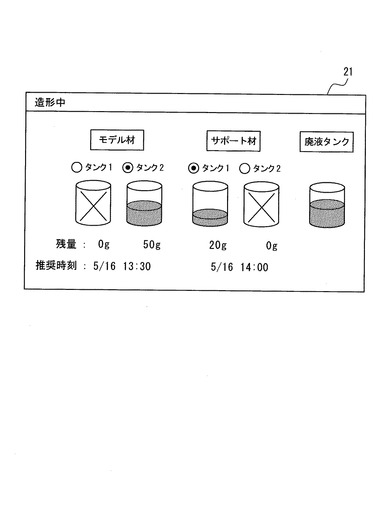
図9は、図2の3次元造形装置10における動作の一例を示した図であり、造形処理中のモニター画面21が示されている。このモニター画面21には、モデル材カートリッジ13Mごとのモデル材Mの残量と、サポート材カートリッジ13Sごとのサポート材Sの残量と、カートリッジ13M,13Sの交換の推奨時刻と、使用中のカートリッジを示すアイコンと、廃液タンク13H内の造形材の蓄積量が表示されている。
【0094】
3次元造形装置10の操作表示部12には、図9に示すように、造形中のモデル材カートリッジ13M、サポート材カートリッジ13Sの残量及び交換推奨時刻、廃液タンク13Hの蓄積量が表示される。これにより、操作者は、モデル材カートリッジ13M、サポート材カートリッジ13Sを交換すべきタイミングや、廃液タンク13H内に蓄積された廃液を廃棄すべきか否かを視覚的に認識することができる。廃液タンク13Hに蓄積された廃液の蓄積量は、重量センサ80が測定した測定値に基づいて算出され、操作表示部12に表示される。
【0095】
廃液タンク13Hに蓄積された廃液の蓄積量が所定量以上に達した場合、すなわち、重量センサ80の測定値が所定値以上に達した場合は、操作表示部12に廃液タンク13H内に蓄積された廃液の廃棄を促すメッセージが表示される。または、廃液タンク13Hからの廃液の溢れ出しを確実に防止するために造形処理を強制的に中断する。
【0096】
また、造形処理の開始時には、これから造形する造形物において発生する廃液量と既に蓄積された廃液量とに基づいて、造形の途中で廃液タンク13H内に蓄積される廃液量が所定量以上になることが事前に判明している場合には、造形処理を開始させないか、あるいは、造形開始時に操作者にその旨を知らせるメッセージを表示させることができる。
【0097】
なお、本実施例では、廃液の蓄積量を検出する蓄積量検出センサとして重量センサ80を用いたが、これに代わり、液面の位置を検出するフロートセンサを廃液タンク13H内に設けて、液面の位置から廃液の蓄積量を検知する構成としてもよい。
【0098】
しかし、重量センサ80に経時劣化等による検出精度の低下や故障が発生した場合は、廃液タンク13H内の廃液の蓄積量を正しく検知できないことがある。また、袋状の容器からなるタンク本体132がカートリッジ筐体131内に十分に展開していない場合は、廃液タンク13Hの重さが一定値を越える前に、廃液が廃液タンク13Hから溢れ出てしまうことも考えられる。この様な場合であっても、廃液ポンプ60の逆回転時における廃液管53,54内の圧力を測定することにより、タンク本体132内の液面が廃液管54の下端に到達したことを正しく検知することができ、廃液が廃液タンク13Hから溢れ出ることを事前に検知することができる。
【0099】
廃液ポンプ60を逆回転させて、廃液管53、54内の圧力を測定した結果、タンク本体132内の液面が廃液管54の下端に到達したことを検知した場合は、操作表示部12にその旨を表示すると共に、造形処理は強制的に中断される。なお、本実施例では、3次元造形装置10の操作表示部12に廃液の廃棄を促す報知を行うこととしたが、ネットワークで接続された造形依頼者端末20に報知を行う構成として良い。
【0100】
<廃液移送経路>
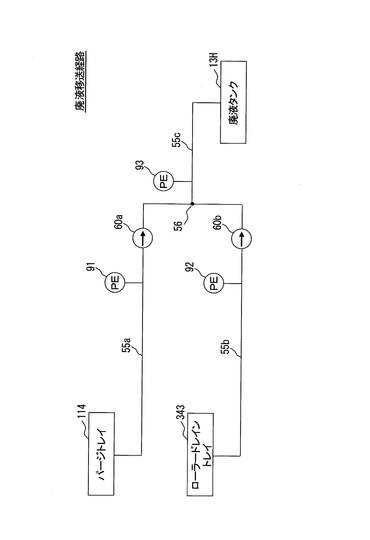
図10は、パージトレイ114及びローラードレイントレイ343から廃液タンク13Hまで廃液を移送する廃液移送経路の一例を示したブロック図である。この廃液移送経路は、パージトレイ114から廃液タンク13Hへ廃液を移送するための第1移送路と、ローラードレイントレイ343から廃液タンク13Hへ廃液を移送するための第2移送路とからなり、分岐部56で分岐している。
【0101】
第1移送路は、廃液ポンプ60aを介して、パージトレイ114と分岐部56とを接続する廃液管55aと、分岐部56と廃液タンク13Hとを接続する廃液管55cとで構成される。第2移送路は、廃液ポンプ60bを介して、ローラードレイントレイ343と分岐部56とを接続する廃液管55bと、廃液管55cとで構成される。すなわち、パージトレイ114及びローラードレイントレイ343に一時的に蓄積された廃液を廃液タンク13Hへ移送するための廃液管は、廃液管55a〜55cからなる。
【0102】
なお、本実施の形態では、第1移送路及び第2移送路は、廃液ポンプ60a及び60bよりも廃液タンク13H側に分岐部56を設け、当該分岐部56にて廃液を合流させてから、廃液タンク13Hへ廃液を運ぶ移送路としているが、分岐部56を設けずに各々の廃液移送路を個別に廃液タンク13Hに接続してもよい。その場合は、パージトレイ114から廃液を移送する廃液管は、第1移送路のことを示し、ローラードレイントレイ343から廃液を移送する廃液管とは、第2移送路を示す。
【0103】
廃液ポンプ60aのローター61を正回転させることにより、第1移送路を介してパージトレイ114内の廃液が廃液タンク13Hへ流入される。また、廃液ポンプ60bのローター61を正回転させることにより、第2移送路を介してローラードレイントレイ343内の廃液が廃液タンク13Hへ流入される。廃液ポンプ60a及び60bは、廃液管55a,55bからなる移送路の中間部に介装される。なお、本実施の形態では、廃液ポンプ60a及び60bとしてチューブポンプを用いたが、これに限らずピストンポンプやダイアフラムポンプを用いてもよいことは云うまでもない。
【0104】
圧力センサ91〜93は、廃液管55a〜55c内の圧力を測定し、廃液管の詰まりを検知するためのセンサであり、例えば、隔膜(ダイアフラム)の変形量から圧力を検出するダイアフラムゲージが用いられる。
【0105】
圧力センサ91は、第1移送路における廃液ポンプ60aよりも上流側、すなわち、パージトレイ114側に設けられ、パージトレイ114と圧力センサ91との間における廃液管55aの詰まりを検出するのに用いられる。また、圧力センサ92は、第2移送路における廃液ポンプ60bよりも上流側、すなわち、ローラードレイントレイ343側に設けられ、ローラードレイントレイ343と圧力センサ92との間における廃液管55bの詰まりを検出するのに用いられる。
【0106】
圧力センサ93は、分岐部56よりも下流側、すなわち、廃液タンク13H側に設けられ、圧力センサ93と廃液タンク13Hとの間における廃液管55cの詰まりを検出するのに用いられる。圧力センサ93は、廃液ポンプ60aに接続された廃液管55aと、廃液ポンプ60bに接続された廃液管55bとの合流点の近傍であって、当該合流点よりも廃液タンク13H側に配置されている。
【0107】
廃液ポンプ60aの正回転時に、圧力センサ91よりも上流側で廃液管55aの詰まりが生じれば、一定レベルを越える負圧が検出されることになる。また、廃液ポンプ60bの正回転時に、圧力センサ92よりも上流側で廃液管55bの詰まりが生じれば、一定レベルを越える負圧が検出されることになる。一方、廃液ポンプ60a又は60bの正回転時に、圧力センサ93よりも下流側で廃液管55cの詰まりが生じれば、一定レベルを越える正圧が検出されることになる。
【0108】
廃液タンク13Hの液面検出には、圧力センサ93が用いられ、廃液タンク13H内における廃液の液面が廃液管54の下端に到達したことは、廃液ポンプ60aの逆回転時における圧力センサ93の出力に基づいて、検出される。詰まり検出時には、正圧を検出し、液面検出時には、負圧を検出する必要があることから、圧力センサ93には、正圧及び負圧の測定可能なセンサが用いられる。
【0109】
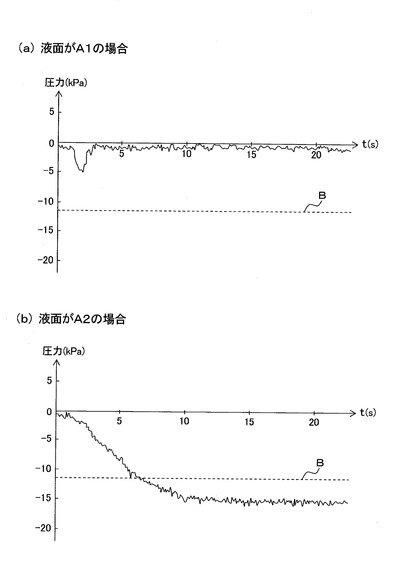
図11は、廃液ポンプ60aを逆回転させた際に、圧力センサ93により測定される圧力の変化を示した図であり、図中の(a)には、図8の廃液タンク13H内における液面の位置がA1である場合が示され、(b)には、液面の位置がA2である場合が示されている。
【0110】
廃液タンク13H内に蓄積された廃液の液面がA1である場合、廃液管54の下端は、液面A1よりも上側に位置し、廃液ポンプ60aを逆回転させたとしても、廃液タンク13H内の空気が吸引されるだけである。このため、廃液ポンプ60aの逆回転開始後、廃液管内に残留する残留物が吸引されることに起因して一時的に圧力が低下するものの、その変化量は(−5kPa)程度と小さく、概ね一定値(0kPa)が維持されている。
【0111】
これに対し、廃液の液面がA2である場合には、廃液管54の下端が、液面A1よりも下側に位置することから、廃液ポンプ60aを逆回転させることにより、廃液タンク13H内に蓄積された廃液が吸引される。このため、廃液ポンプ60aの逆回転開始後、圧力は、著しく低下している。
【0112】
具体的に説明すれば、圧力は、廃液の粘性により経路長に応じた圧力損失があることから、廃液が廃液管54の下端から圧力センサ93に到達するまでの間、徐々に低下し、逆回転を開始してから10秒程度経過した時点で、(−15kPa)に飽和している。
【0113】
従って、廃液タンク13H内の液面が廃液管54の下端に到達したか否かを判定するためには、液面判定閾値をB=−12kPa程度と定め、圧力センサ93により測定される圧力をその液面判定閾値と比較すれば良い。
【0114】
また、逆回転時の飽和圧力は、廃液ポンプ60aのローター61を回転させる回転速度を速くするほど、低くなる。このため、逆回転時の回転速度を正回転時よりも速くすることにより、廃液管54の下端が液面下にある場合の圧力を廃液管54の下端が液面上にある場合に比べて十分に低くすることができ、廃液タンク13H内の蓄積量が一定量を越えたか否かの検出精度を向上させることができる。
【0115】
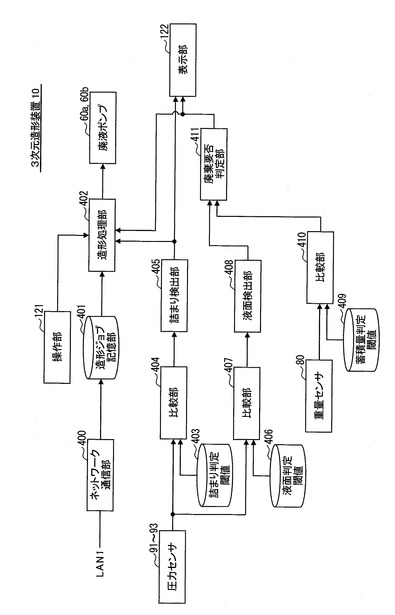
図12は、図1の3次元造形装置10内の機能構成の一例を示したブロック図である。この3次元造形装置10は、廃液ポンプ60a,60b、重量センサ80、圧力センサ91〜93、操作部121、表示部122、ネットワーク通信部400、造形ジョブ記憶部401、造形処理部402、詰まり判定閾値記憶部403、比較部404,407,410、詰まり検出部405、液面判定閾値記憶部406、液面検出部408、蓄積量判定閾値記憶部409及び廃棄要否判定部411により構成される。
【0116】
ネットワーク通信部400は、LAN1経由で造形依頼者端末20から受信した造形データを造形ジョブ記憶部401内に格納する。造形ジョブ記憶部401には、造形依頼者端末20から取得した複数の造形ジョブが保持される。
【0117】
造形ジョブは、造形データとその属性情報とからなり、造形ジョブの識別情報に関連付けて保持される。造形データの属性情報には、造形データの識別情報、造形データの送受信日時、造形依頼者の識別情報などが含まれる。また、この造形データには、造形に必要なモデル材M及びサポート材Sの量や、造形時に造形に用いられずに廃棄される廃液量の情報も含む。なお、これら造形に必要な造形材の量や廃液量は、造形依頼者端末20にて算出し、3次元造形装置10に造形データの一部として送信してもよいし、造形依頼者端末20から受信した造形データの形状情報に基づいて3次元造形装置10内で計算し、造形ジョブ記憶部401に記憶してもよい。
【0118】
造形処理部402は、造形ジョブ記憶部401内の造形データに基づいて、造形ステージ112上に造形対象物を形成するための造形処理を行う。この造形処理は、例えば、造形操作者による造形指示に基づいて開始され、ヘッドユニット111のxy駆動制御、造形ステージ112のz駆動制御、造形材ノズル312,322内の圧電素子を駆動することによる造形材の吐出制御、UVランプ351を駆動することによる造形材の硬化制御、廃液ポンプ60a,60bの駆動制御が行われる。
【0119】
造形処理の開始時や造形処理中には、パージ処理が実行される。造形処理中におけるパージ処理は、定期的に行われる。例えば、パージ処理は、一定時間が経過するごとに実行される。或いは、予め定められたメンテナンススケジュールに従って、パージ処理が実行される。
【0120】
操作部121は、3次元造形装置10の操作者を造形操作者と呼ぶことにすれば、造形操作者による操作を受け付けると、その操作内容に応じた操作信号を造形処理部402へ出力する。
【0121】
詰まり判定閾値記憶部403には、廃液管の詰まりを検出するための詰まり判定閾値TMが保持される。具体的には、廃液管55a及び55bの詰まりを検出するための判定閾値TMa及びTMbがそれぞれ保持され、廃液管55cの詰まりを検出するための判定閾値TMcが保持される。判定閾値TMa及びTMbは、いずれも負の数であり、判定閾値TMcは、正の数である。
【0122】
比較部404は、廃液ポンプ60a又は60bの正回転時に、圧力センサ91〜93によって測定された圧力を判定閾値TMa〜TMcと比較し、その比較結果を詰まり検出部405へ出力する。詰まり検出部405は、比較部404の比較結果に基づいて、廃液管55a〜55cの詰まりを検出し、その検出結果を造形処理部402及び表示部122へ出力する。
【0123】
造形処理部402は、造形処理の実行中に廃液管55a〜55cの詰まりが検出されれば、当該造形処理を中断する。表示部122は、廃液管55a〜55cの詰まりが検出されれば、廃液管に詰まりが生じたことを示すメッセージを表示する。
【0124】
液面判定閾値記憶部406には、廃液タンク13H内の液面が廃液管54の下端に到達したことを検出するための液面判定閾値EMが保持される。この液面判定閾値EMは、負の数であり、廃液タンク13H内の液面が廃液管54の下端に到達していない場合における圧力の変動幅に応じて予め定められる。
【0125】
比較部407は、廃液ポンプ60aの逆回転時に、圧力センサ93によって測定された圧力を液面判定閾値EMと比較し、その比較結果を液面検出部408へ出力する。液面判定閾値EMと比較させる圧力には、廃液管54の下端から吸引された廃液が圧力センサ93に到達するまでの間の圧力変動を考慮して、廃液ポンプ60aの逆回転駆動が開始されてから一定時間Tが経過した時点での検出値が用いられる。時間Tは、固定値であっても良いが、廃液管54の下端から圧力センサ93までの経路長と、ローター61の回転速度とに応じて異ならせても良い。
【0126】
液面検出部408は、比較部407の比較結果に基づいて、廃液タンク13H内における廃液の液面が廃液管54の下端に到達したことを検出し、その検出結果を廃棄要否判定部411へ出力する。
【0127】
蓄積量判定閾値記憶部409には、廃液タンク13H内の蓄積量が一定量を越えたことを検出するための蓄積量判定閾値TSが保持される。比較部410は、重量センサ80により測定された重さを蓄積量判定閾値TSと比較し、その比較結果を廃棄要否判定部411へ出力する。
【0128】
廃棄要否判定部411は、廃液タンク13Hから廃液が溢れ出るのを事前に検知するために、廃液タンク13Hが満充填状態であるか否かを判定し、蓄積された廃液の廃棄が必要であるか否かを判定する。廃液タンク13Hが満充填状態であるか否かは、液面検出部408の検出結果と比較部410の比較結果とに基づいて、廃液タンク13H内における廃液の蓄積量が一定量を越えたか否かによって判定され、その判定結果が造形処理部402及び表示部122へ出力される。廃液タンク13Hが満充填状態であるか否かの判定は、例えば、パージ処理の開始前に行われる。このため、パージ処理の実行中に、廃液タンク13Hが満充填状態になるのを防止することができる。
【0129】
廃棄要否判定部411は、重量センサ80の測定値と蓄積量判定閾値TSとを比較する比較部410の比較結果と、液面検出部408の検出結果の双方から、廃液タンク13Hの満充填状態を検出することができる。具体的には、基本的に重量センサ80が正常に動作している状態では重量センサ80の測定値に基づいて満充填状態を検出し、仮に重量センサ80に故障が生じるなどして比較部410から正確な比較結果が得られなかったり、重量センサ80の測定値に基づく警告を無視して造形処理を継続した場合には、液面検出部408の検出結果に基づいて満充填状態が検出される。
【0130】
したがって、液面検出部408が満充填状態として検出する廃液の蓄積量を定める廃液管54の長さと、重量センサ80の測定値と比較される蓄積量判定閾値TSは、上述した条件を満足するように定められている。これにより、重量センサ80が正常に動作しているにも関わらず、廃液タンク13H内の廃液の蓄積量が廃液管54の下端に到達し、廃液ポンプ60aを逆回転させた際にパージトレイ114まで廃液が逆流することを防止することができる。
【0131】
なお、本実施の形態では、廃液ポンプ60a,60bとしてチューブポンプを用いたが、ピストンポンプやダイアフラムポンプを用いた場合でも同様の作用を有することができる。すなわち、廃液トレイであるローラードレイントレイ343やパージトレイ114から廃液タンク13Hへ廃液を移送するために、各ポンプを正方向に作用させるのとは逆方向に各ポンプを作用させることにより、廃棄要否判定部411は、満充填状態であるか否かを検出することができる。
【0132】
造形処理部402は、造形処理の実行中におけるパージ処理の開始時などに、廃液タンク13H内の蓄積量が一定量を越えたことが検知されれば、当該造形処理を中断する。表示部122は、廃液タンク13H内の蓄積量が一定量を越えたことが検知されれば、廃液タンク13H内の蓄積量が一定量を越えたことを示すメッセージを表示する。
【0133】
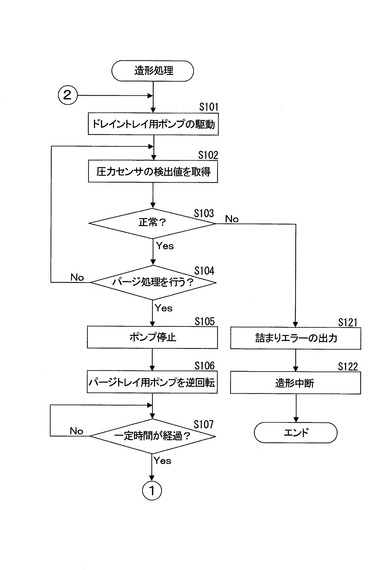
図13及び図14のステップS101〜S117,S121,S122,S131,S132,S141及びS142は、図12の3次元造形装置10における造形処理時の動作の一例を示したフローチャートである。まず、造形処理部402は、ローラードレイントレイ343内の廃液を廃液タンク13Hへ流入させるために、廃液ポンプ60bを正回転駆動する(ステップS101)。次に、比較部404は、一定時間ごとに圧力センサ92,93の検出値を取得し、詰まり判定閾値TMと比較する(ステップS102,S103)。
【0134】
このとき、詰まり検出部405は、圧力センサ92の検出値が判定閾値TMbよりも低いか、或いは、圧力センサ93の検出値が判定閾値TMcよりも高ければ、廃液管55b,55cの詰まりが生じたと判断し、詰まりエラーを出力し、造形処理が中断される(ステップS121,S122)。一方、圧力センサ92,93の検出値が正常であれば、ステップS102,S103の処理手順が繰り返される。
【0135】
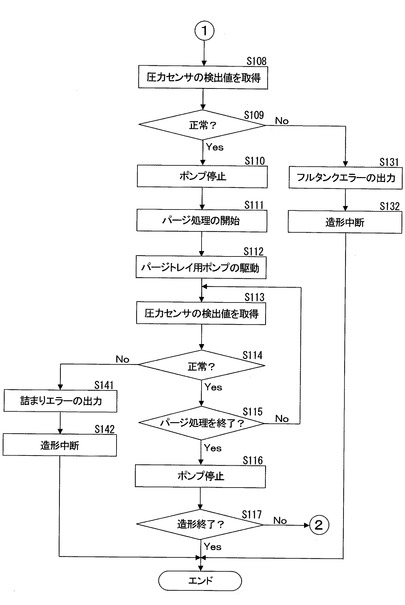
次に、造形処理部402は、パージ処理を実行するタイミングが到来すれば、廃液ポンプ60bを停止し(ステップS104,S105)、廃液タンク13Hが満充填状態であるか否かを検知するために、廃液ポンプ60aを逆回転駆動する(ステップS106)。比較部407は、逆回転駆動の開始から一定時間が経過すれば、圧力センサ93の検出値を取得し、液面判定閾値EMと比較する(ステップS107〜S109)。
【0136】
このとき、液面検出部408は、圧力センサ93の検出値が液面判定閾値EMよりも低ければ、廃液タンク13H内の液面が廃液管54の下端に到達したと判断し、フルタンクエラーを出力し、造形処理が中断される(ステップS131,S132)。
【0137】
一方、造形処理部402は、圧力センサ93の検出値が正常であれば、廃液ポンプ60aを停止する(ステップS110)。次に、造形処理部402は、パージ処理を開始し、パージトレイ114内の廃液を廃液タンク13Hへ流入させるために、廃液ポンプ60aを正回転駆動する(ステップS111,S112)。
【0138】
次に、比較部404は、一定時間ごとに圧力センサ91,93の検出値を取得し、詰まり判定閾値TMと比較する(ステップS113,S114)。このとき、詰まり検出部405は、圧力センサ91の検出値が判定閾値TMaよりも低いか、或いは、圧力センサ93の検出値が判定閾値TMcよりも高ければ、廃液管55a,55cの詰まりが生じたと判断し、詰まりエラーを出力し、造形処理が中断される(ステップS141,S142)。一方、圧力センサ91,93の検出値が正常であれば、ステップS113,S114の処理手順が繰り返される。
【0139】
次に、造形処理部402は、パージ処理を終了し、廃液ポンプ60aを停止する(ステップS115,S116)。ステップS101以降の処理手順は、造形処理が終了するまで繰り返される(ステップS117)。
【0140】
本実施の形態によれば、廃液タンク13H内の液面が廃液管54の下端に到達したか否かによって、廃液タンク13H内の蓄積量が一定量を越えたか否かを確実に検知することができる。
【0141】
また、廃液管の詰まり検出用の圧力センサ93を用いて、廃液タンク13H内の液面が廃液管54の下端に到達したことが検出される。このため、廃液タンク13H内における廃液の蓄積量が一定量を越えたことを検知するためのセンサを別個に用意する場合に比べて、製造コストの増大を抑制することができる。さらに、圧力センサ93又は重量センサ80のいずれかに不具合が生じた場合であっても、廃液タンク13H内の蓄積量が一定量を越えたことを正しく検知することができ、検出精度を向上させることができる。
【0142】
なお、本実施の形態では、パージトレイ114内の廃液を回収するための廃液ポンプ60aを逆回転させた際の圧力の検出値に基づいて、廃液タンク13H内の液面が廃液管54の下端に到達したことを検出する場合の例について説明したが、本発明はこれに限定されるものではない。例えば、ローラードレイントレイ343内の廃液を回収するための廃液ポンプ60bを液面検出に用いても良い。
【0143】
また、本実施の形態では、廃棄要否判定部411が液面検出部408の検出結果と比較部410の比較結果とに基づいて、廃液タンク13Hが満充填状態であるか否かを判定する場合の例について説明したが、本発明はこれに限定されるものではない。例えば、廃液を蓄積するための予備タンクを備え、液面検出部408の検出結果と重量センサ80の出力とに基づいて、廃液の流入先を廃液タンク13Hから予備タンクへ切り替えるような構成であっても良い。
【0144】
また、本実施の形態では、可搬プレート41とプレート取付台42とからz移動ユニット40が構成される場合の例について説明したが、本発明は、可搬プレート41及びプレート取付台42からなるユニットが可動式のものに限定するものではなく、固定式のものであっても良い。すなわち、ヘッドユニット111を鉛直方向へ移動させることにより、可搬プレート41上に造形材層を積層形成するようなものも本発明には含まれる。
【符号の説明】
【0145】
100 造形システム
10 3次元造形装置
11 上部扉
110 作業空間
111 ヘッドユニット
112 造形ステージ
113a x走査用係合溝
113b y走査用ガイド機構
114 パージトレイ
116 天板
12 操作表示部
121 操作部
122 表示部
13 前面扉
130 カートリッジ収容部
13M モデル材カートリッジ
13S サポート材カートリッジ
13H 廃液タンク
20 造形依頼者端末
31 サポート材用ノズルユニット
311 サポート材用のリザーブタンク
312 サポート材用の造形材ノズル
32 モデル材用ノズルユニット
321 モデル材用のリザーブタンク
322 モデル材用の造形材ノズル
33 y走査用ホルダユニット
34 ローラーユニット
341 膜厚調整用ローラー
342 ブレード
343 ローラードレイントレイ
344 吸引パイプ
35 ランプユニット
351 UVランプ
40 z移動ユニット
41 可搬プレート
42 プレート取付台
43 z駆動装置
51 吸込口
52〜54,55a〜55c 廃液管
56 分岐部
60,60a,60b 廃液ポンプ
80 重量センサ
91〜93 圧力センサ
400 ネットワーク通信部
401 造形ジョブ記憶部
402 造形処理部
403 詰まり判定閾値記憶部
404,407,410 比較部
405 詰まり検出部
406 液面判定閾値記憶部
408 液面検出部
409 蓄積量判定閾値記憶部
411 廃棄要否判定部
1 LAN
2 吐出口
3 液滴
4 造形材層
M モデル材
S サポート材
SS 下地層
【技術分野】
【0001】
本発明は、3次元造形装置に係り、さらに詳しくは、造形材からなる造形材層を積層形成する3次元造形装置の改良に関する。
【背景技術】
【0002】
近年、積層造形法を用いて、立体造形物を簡易的に作製することが行われている。積層造形法は、造形対象物を多数の薄い層に分割した際の各層と同じ2次元形状の薄板を形成し、この薄板を積層して立体造形物を作製する造形方法であり、ラピッドプロトタイピングに用いられている。この様な積層造形法には、光造形法、粉末結合法、シート堆積法、樹脂押し出し法、インクジェット方式などがある(例えば、特許文献1)。
【0003】
インクジェット方式の造形法は、インクジェットプリンタの技術を利用した造形法であり、インクの代わりに紫外線(UV)硬化樹脂などの光硬化性の造形材を用い、造形材をノズルから吐出させ、造形ステージ上に堆積させた造形材に光を照射して固化させる。この造形法では、造形材を吐出するための多数の吐出口が略直線状に配列された造形材ノズルを造形ステージと平行に2次元走査することによって、造形材からなるスライス層が形成され、スライス層を順に積層形成することによって立体造形物が形成される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−90530号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
インクジェット方式の3次元造形装置には、使用済みの造形材からなる廃液を蓄積するための廃液タンクが設けられている。この廃液タンクには、造形中に回収された造形材や、定期的に行われるメンテナンス時にパージトレイ内に排出された造形材が収容される。通常、廃液タンクは、廃液の蓄積量が一定量を越えた時点で交換される。
【0006】
従来の3次元造形装置は、例えば、廃液タンクの重さを測定するための重量センサを備え、廃液タンクの重さが一定値を越えたか否かにより、廃液タンク内における廃液の蓄積量が一定量を越えたか否かを判定している。また、液面の高さが一定レベルを越えたか否かを測定することができるフロートセンサを設けて、廃液タンク内の蓄積量が一定量を越えたか否かを判定することにより、廃液タンクの溢れを未然に検知することも考えられる。しかし、これらのセンサは経時変化により、検出精度が極端に低下し、或いは、故障が生じることがあるため、廃液の蓄積量が一定量を越えても正しく検知されずに、廃液が廃液タンクから溢れ出てしまうという可能性があった。
【0007】
そこで、異なる種類のセンサを2つ以上、例えば、重量センサに加え、別途、フロートセンサなどのセンサを設けることにより、一方のセンサに故障が生じたとしても、他方のセンサを用いて廃液タンクの溢れを未然に検知することが考えられる。しかしながら、タンク溢れを検知するためのセンサを2個以上別個に用意するのは、造形装置の製造コストが増大し、また、装置構成が複雑化してしまうという問題があった。
【0008】
本発明は、上記事情に鑑みてなされたものであり、製造コストの増大を抑制しつつ、廃液タンク内における廃液の蓄積量が一定量を越えたことを確実に検知することができる3次元造形装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
第1の本発明による3次元造形装置は、造形ステージ上に造形材ノズルから造形材を吐出させ、かつ、吐出された造形材を硬化させて所定の厚みを有する造形材の層を形成する動作を繰り返すことにより、当該造形材の層を積層して造形を行う3次元造形装置であって、上記造形材を吐出するための造形材吐出手段と、上記造形材を硬化させるための硬化手段と、上記造形材が流動可能な状態でこれを上面から回転しながら押圧して、当該造形材の余剰分を掻き取るためのローラー部と、上記造形材吐出手段、上記硬化手段及び上記ローラー部を支承するヘッドユニットと、上記ヘッドユニットを少なくとも主走査方向に往復走査させるためのヘッド駆動手段と、上記ヘッドユニットと上記造形ステージとの高さ方向の相対位置を移動させるための垂直駆動手段と、上記ヘッド駆動手段及び上記垂直駆動手段を制御するとともに、上記造形材吐出手段による上記造形材の吐出及び上記硬化手段による硬化を制御する造形制御手段と、上記ヘッドユニットの可動エリア内であって、かつ、上記造形ステージに隣接して設けられ、上記造形材吐出手段の目詰まりを防止するために上記造形材を強制的に吐出するパージ処理の際に、当該吐出された造形材を一時的に収容するパージトレイと、上記パージトレイに一時的に収容された廃液を蓄積するための廃液タンクと、上記廃液タンク内に蓄積された廃液の蓄積量を検出するための蓄積量検出センサと、一端が上記廃液タンク内に配設され、他端が上記パージトレイに接続された廃液管と、上記廃液管を介して、上記パージトレイ内の廃液を上記廃液タンクへ流入させる廃液ポンプと、上記廃液ポンプよりも上記廃液タンク側において、上記廃液管内の圧力を測定する圧力センサと、上記廃液ポンプを上記パージトレイ内の廃液を上記廃液タンクへ流入させる方向とは逆方向に動作させた際における上記圧力センサの出力に基づいて、上記廃液タンク内の液面が上記廃液管の一端に到達したことを検出する液面検出手段と、上記液面検出手段の検出結果又は上記蓄積量検出センサの検出結果に基づいて、上記廃液タンク内における廃液の蓄積量が一定量を越えたか否かを判定する蓄積量判定手段とを備えて構成される。
【0010】
一般に、廃液管の一端が液面下にあって、廃液を吸引する場合と、廃液管の一端が液面上にあって、空気を吸引する場合とでは、廃液管内の圧力が大きく異なる。この様な原理を利用して、廃液タンク内の液面が廃液管の一端に到達したことを検出することにより、廃液タンク内における廃液の蓄積量が一定量を越えたことを確実に検知することができる。また、廃液タンク内の液面が廃液管の一端に到達したか否かによって、廃液タンク内の蓄積量が一定量を越えたか否かを検知することができ、別途タンク溢れを検知するためのセンサを設ける必要がなくなり、製造コストの増大を抑制することができる。
【0011】
第2の本発明による3次元造形装置は、上記構成に加え、上記廃液ポンプの正回転時に、上記圧力センサによって測定された上記廃液管内の圧力を正の第1判定閾値と比較する第1比較手段と、第1比較手段の比較結果に基づいて、上記廃液管の詰まりを検出する詰まり検出手段と、上記廃液ポンプの逆回転時に、上記圧力センサによって測定された上記廃液管内の圧力を負の第2判定閾値と比較する第2比較手段とを備え、上記液面検出手段が、第2比較手段の比較結果に基づいて、上記廃液タンク内の液面が上記廃液管の一端に到達したことを検出するように構成される。
【0012】
この3次元造形装置では、廃液ポンプよりも廃液タンク側における廃液管内の圧力を測定することにより、廃液管の詰まり検出と、液面検出とを行っている。つまり、廃液管の詰まり検出用の圧力センサを用いて、廃液タンク内の液面が廃液管の一端に到達したことを検出している。このため、廃液タンク内における廃液の蓄積量が一定量を越えたことを検知するためのセンサを別個に用意する場合に比べて、製造コストの増大を抑制することができる。
【0013】
第3の本発明による3次元造形装置は、上記構成に加え、上記ローラー部で掻き取られた造形材からなる廃液を一時的に収容するローラードレイントレイを備え、上記廃液管が、上記廃液ポンプと上記圧力センサとの間に分岐部を備え、上記分岐部と上記パージトレイとを結ぶ第1廃液管と、上記分岐部と上記ローラードレイントレイとを結ぶ第2廃液管と、上記分岐部と上記廃液タンクとを結ぶ第3廃液管とからなり、上記廃液ポンプが、上記第1廃液管を介して、上記パージトレイ内の廃液を上記廃液タンクへ流入させる第1廃液ポンプと、上記第2廃液管を介して、上記ローラードレイントレイ内の廃液を上記廃液タンクへ流入させる第2廃液ポンプとからなるように構成される。
【0014】
第4の本発明による3次元造形装置は、上記構成に加え、上記第1廃液ポンプよりも上記パージトレイ側において、上記第1廃液管内の圧力を測定する第1圧力センサと、上記第2廃液ポンプよりも上記ローラードレイントレイ側において、上記第2廃液管内の圧力を測定する第2圧力センサとを備え、上記詰まり検出手段が、上記第1圧力センサの測定値に基づいて上記第1廃液ポンプ及び上記パージトレイ間の詰まりを検出し、上記第2圧力センサの測定値に基づいて上記第2廃液ポンプ及び上記ローラードレイントレイ間の詰まりを検出するように構成される。
【0015】
第5の本発明による3次元造形装置は、上記構成に加え、上記廃液ポンプが、逆回転時の回転速度が正回転時よりも速くなるように構成される。この様な構成によれば、廃液管の一端が液面下にある場合における廃液管内の圧力を廃液管の一端が液面上にある場合に比べて十分に低くすることができ、廃液タンク内の蓄積量が一定量を越えたか否かの検出精度を向上させることができる。
【0016】
第6の本発明による3次元造形装置は、上記構成に加え、上記蓄積量検出センサが、上記廃液タンクの重さを測定する重量センサであり、上記蓄積量判定手段が、上記液面検出手段の検出結果及び上記重量センサの出力に基づいて、上記廃液タンク内における廃液の蓄積量が一定量を越えたか否かを判定するように構成される。
【0017】
この様な構成によれば、圧力センサ又は重量センサのいずれかに不具合が生じた場合であっても、廃液タンク内の蓄積量が一定量を越えたことを正しく検知することができ、検出精度を向上させることができる。
【0018】
第7の本発明による3次元造形装置は、造形ステージ上に造形材ノズルから造形材を吐出させ、かつ、吐出された造形材を硬化させて所定の厚みを有する造形材の層を形成する動作を繰り返すことにより、当該造形材の層を積層して造形を行う3次元造形装置であって、上記造形材を吐出するための造形材吐出手段と、上記造形材を硬化させるための硬化手段と、上記造形材が流動可能な状態でこれを上面から回転しながら押圧して、当該造形材の余剰分を掻き取るためのローラー部と、上記造形材吐出手段、上記硬化手段及び上記ローラー部を支承するヘッドユニットと、上記ヘッドユニットを少なくとも主走査方向に往復走査させるためのヘッド駆動手段と、上記ヘッドユニットと上記造形ステージとの高さ方向の相対位置を移動させるための垂直駆動手段と、上記ヘッド駆動手段及び上記垂直駆動手段を制御するとともに、上記造形材吐出手段による上記造形材の吐出及び上記硬化手段による硬化を制御する造形制御手段と、上記ローラー部で掻き取られた造形材からなる廃液を一時的に収容するローラードレイントレイと、上記ローラードレイントレイに一時的に収容された廃液を蓄積するための廃液タンクと、上記廃液タンク内に蓄積された廃液の蓄積量を検出するための蓄積量検出センサと、一端が上記廃液タンク内に配設され、他端が上記ローラードレイントレイに接続された廃液管と、上記廃液管を介して、上記ローラードレイントレイ内の廃液を上記廃液タンクへ流入させる廃液ポンプと、上記廃液ポンプよりも上記廃液タンク側において、上記廃液管内の圧力を測定する圧力センサと、上記廃液ポンプを上記ローラードレイントレイ内の廃液を上記廃液タンクへ流入させる方向とは逆方向に動作させた際における上記圧力センサの出力に基づいて、上記廃液タンク内の液面が上記廃液管の一端に到達したことを検出する液面検出手段と、上記液面検出手段の検出結果又は上記蓄積量検出センサの検出結果に基づいて、上記廃液タンク内における廃液の蓄積量が一定量を越えたか否かを判定する蓄積量判定手段とを備えて構成される。
【発明の効果】
【0019】
本発明による3次元造形装置では、廃液タンク内における廃液の蓄積量が一定量を越えたことを確実に検知することができる。すなわち、仮に重量センサなどの廃液タンク内の蓄積量を検出するためのセンサに検出精度の低下や、故障が発生した場合であっても、廃液タンク内における廃液の蓄積量を検知することができるので、廃液タンクから廃液が溢れ出てしまうことを確実に防止することができる。
【0020】
また、廃液管の詰まり検出用の圧力センサを用いて、廃液タンク内の液面が廃液管の一端に到達したことを検出することにより、廃液タンク内の蓄積量が一定量を越えたことを検知するためのセンサを別個に用意する場合に比べて、製造コストの増大を抑制することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の実施の形態による3次元造形装置10を含む造形システム100の一構成例を示したシステム図である。
【図2】図1の3次元造形装置10の一構成例を示した斜視図であり、作業空間110及びカートリッジ収容部130内の様子が示されている。
【図3】図2のヘッドユニット111の概略構成の一例を示した図であり、ヘッドユニット111をx,y,z方向から見た様子が示されている。
【図4】図2の3次元造形装置10における造形時の動作の一例を模式的に示した説明図であり、造形ステージ112上に立体造形物が形成される様子が示されている。
【図5】図2の3次元造形装置10における造形時の動作の一例を模式的に示した説明図であり、x方向の主走査往路及び主走査復路の様子が示されている。
【図6】廃液を一時的に収容するパージトレイ114及びローラードレイントレイ343の構成例を示した図である。
【図7】パージトレイ114やローラードレイントレイ343内の廃液を廃液タンク13Hへ流入するための廃液ポンプ60の構成例を示した断面図である。
【図8】図2の廃液タンク13Hの構成例を示した断面図であり、廃液タンク13Hをzx面に平行な鉛直面で切断した場合の切断面が示されている。
【図9】図2の3次元造形装置10における動作の一例を示した図であり、造形処理中のモニター画面21が示されている。
【図10】パージトレイ114及びローラードレイントレイ343から廃液タンク13Hまで廃液を移送する廃液移送経路の一例を示したブロック図である。
【図11】廃液ポンプ60aを逆回転させた際に、圧力センサ93により測定される圧力の変化を示した図である。
【図12】図1の3次元造形装置10内の機能構成の一例を示したブロック図である。
【図13】図12の3次元造形装置10における造形処理時の動作の一例を示したフローチャートである。
【図14】図12の3次元造形装置10における造形処理時の動作の一例を示したフローチャートである。
【発明を実施するための形態】
【0022】
まず、本発明による3次元造形装置が前提とするインクジェット方式の造形装置の概略構成について、図1〜図5を用いて説明する。
【0023】
<造形システム100>
図1は、本発明の実施の形態による3次元造形装置10を含む造形システム100の一構成例を示したシステム図である。この造形システム100は、3次元造形装置10と、LAN(Local Area Network)1を介して3次元造形装置10に接続された複数の造形依頼者端末20により構成される。
【0024】
3次元造形装置10は、インクジェット方式の積層型造形機であり、所定のUV硬化樹脂を造形材として用い、後述する造形ステージ上に造形材からなる造形材層を順に積層形成することによって所望の立体造形物を形成する。造形依頼者端末20は、3次元造形用のアプリケーションプログラムがインストールされたPC(パーソナルコンピュータ)であり、所望の立体造形物を作製するための造形データを生成する造形データ作成装置として機能する。
【0025】
造形データは、造形対象物の3次元形状を示す形状情報と、形状情報以外の造形条件とからなる。造形データは、例えば、CADデータに基づいて作成され、必要に応じて、3次元造形装置10で用いられる積層データとして、各層単位でのデータに加工される。但し、層単位でのデータ加工は、3次元造形装置10側で行われても良い。形状情報以外の造形条件とは、造形対象物に関わらず指定することが可能な造形情報のことであり、造形材の種類、造形材層の厚さ、走査速度などの造形パラメータと、造形ステージ上における造形対象物の配置態様を示す配置情報とからなる。
【0026】
造形依頼者端末20において作成された造形データは、3次元造形装置10へ送信される。3次元造形装置10では、LAN1を介して造形依頼者端末20から受信した複数の造形データが造形ジョブとして管理される。すなわち、造形ジョブは、造形データと、造形データに関連付けて保持される属性情報とからなる。この属性情報には、造形データの識別情報、造形データの送受信日時、造形依頼者の識別情報などが含まれる。造形依頼者端末20は、この様な造形処理の依頼者が使用する端末装置である。
【0027】
この3次元造形装置10には、上部扉11、操作表示部12及び前面扉13が設けられている。上部扉11は、外部から後述する作業空間110へアクセスするのを規制し、また、造形材などが外部空間へ飛散するのを防止するための開閉可能な遮断扉であり、手前側を持ち上げることにより、作業空間110へアクセスすることができる。操作表示部12は、例えば、タッチパネルからなり、ユーザによる操作を受け付け、また、動作状態や各種のエラーメッセージを画面表示する。前面扉13は、造形材カートリッジなどを収容するカートリッジ収容部130用の開閉扉であり、上部を手前側へ移動させることにより、後述するカートリッジ収容部130へアクセスすることができる。
【0028】
<3次元造形装置10>
図2は、図1の3次元造形装置10の一構成例を示した斜視図であり、作業空間110及びカートリッジ収容部130内の様子が示されている。図中には、上部扉11及び前面扉13を開扉した状態の3次元造形装置10が示されている。
【0029】
作業空間110は、造形材を吐出するヘッドユニット111を2次元走査させ、また、ヘッドユニット111から吐出した造形材を造形ステージ112上に堆積させるための空間であり、作業台としての天板116上に形成されている。この天板116には、ヘッドユニット111を主走査方向であるx方向に駆動させる際にヘッドユニット111をガイドする一対のx走査用係合溝113aと、ヘッドユニット111を副走査方向であるy方向に駆動させる際にヘッドユニット111をガイドするy走査用ガイド機構113bと、パージトレイ114及び受光孔115が配置されている。なお、ヘッドユニット111は、一方のx走査用係合溝113aに沿って作業台近傍に設けられる図示しない駆動手段によってx走査方向に往復動されるようになっている。
【0030】
造形ステージ112は、水平で平坦な造形面を有し、造形面上に造形材を堆積させ、立体造形物を形成するための可動ステージであり、鉛直方向に移動させることができる。この造形ステージ112は、天板116の中央に配置されている。ヘッドユニット111は、図示しない駆動装置によって、造形ステージ112と平行に2次元走査される可動ユニットである。
【0031】
この3次元造形装置10では、鉛直方向をz方向とし、互いに直交する水平方向をxy方向とすれば、ユーザから見て左右方向となるx方向を主走査方向とし、ユーザから見て前後方向となるy方向を副走査方向として、2次元走査が行われる。造形材は、主走査方向の走査時に吐出される。また、ヘッドユニット111は、上記2次元走査により、矩形エリア内の任意の位置に移動させることができ、当該矩形エリアが可動エリアとなる。
【0032】
また、言い換えれば、ここでのy方向とは、後述するモデル材用ノズルユニット32及びサポート材用ノズルユニット31の各々が有する複数のオリフィス(後述する吐出口2)が配列した並び方向であり、x方向は水平面内においてこのy方向と直交する方向である。
【0033】
x走査用係合溝113aは、ヘッドユニット111を主走査方向へ走査する駆動装置と係合させるための溝であり、天板116の前端部及び後端部に形成されている。パージトレイ114は、ヘッドユニット111から排出された造形材を使用済み造形材として一時的に収容する容器であり、その様な使用済み造形材からなる造形材液が廃液として保持される。パージトレイ114は、ヘッドユニット111の可動エリア内であって、造形ステージ112よりも左側に配置されている。
【0034】
3次元造形装置10では、造形処理中において、定期的にパージ処理が行われる。パージ処理は、ヘッドユニット111を造形エリアとしての造形ステージ112上からパージトレイ114上に移動させ、ヘッドユニット111に搭載されている造形材ノズル312,322から造形材を強制的に吐出させることにより、造形材を吐出するための吐出口2や、吐出口2に造形材を供給するための造形材供給経路内に残留する残留物を除去するとともに、造形材ノズル312,322の表面に、図示しないゴム部材を当接させ、摺動させることにより、造形材ノズル表面を清掃する処理である。ここで、ノズルから吐出された造形材は、後述する廃液タンク13Hに回収されるようになっている。
【0035】
受光孔115は、造形材を硬化させるためのUV光の照度を検出する照度センサ用の受光窓であり、天板116に形成された貫通孔からなる。この受光孔115は、造形ステージ112を挟んでパージトレイ114とは反対側に配置されている。また、具体的な動作としては、操作表示部12に設けられるランプユニット35の照度検査スイッチを押下し、ヘッドユニット111を駆動させることにより、自動的に受光孔115の真上に位置させ、ランプユニット35を点灯させ、UV光の照度を、受光孔115の内部に設けられる照度センサにより検出させる。
【0036】
カートリッジ収容部130内には、2つのモデル材カートリッジ13Mと、2つのサポート材カートリッジ13Sと、廃液タンク13Hが収容されている。ヘッドユニット111から吐出される造形材には、造形対象物自体を構成するモデル材Mと、造形対象物のオーバーハング部分や孤立部分を支持し、最終的には除去されるサポート材Sとがある。
【0037】
本実施例では、サポート材Sは、モデル材Mに比べ、サポート材Sを除去するための水に対する溶解性の高い材料が含まれている。なお、ここでのオーバーハング部分とは、造形物がz方向(つまり高さ方向)において下方に位置する造形部分よりx−y平面で張り出した部分を意味し、言い換えれば、オーバーハング形状を有する造形物とは、既に成形されたモデル材のスライスが存在しない部分の上表面に新たなモデル材のスライスが成形される部分(オーバーハング部)を有する造形物である。
【0038】
モデル材カートリッジ13Mは、使用前のモデル材Mを収容する着脱式の造形材タンクである。サポート材カートリッジ13Sは、使用前のサポート材Sを収容する着脱式の造形材タンクである。つまり、モデル材カートリッジ13Mやサポート材カートリッジ13Sには、ヘッドユニット111の造形材ノズル312,322から吐出させる前の造形材が収容される。
【0039】
廃液タンク13Hは、パージトレイ114や後述するヘッドユニット111内のローラードレイントレイ(後述)から回収された廃液を蓄積するための貯留容器であり、取り外して交換することができる。なお、廃液タンク13Hには、内部に液面検出用のセンサや、廃液タンク13H自体の重量を検出する重量センサなどを設けることにより、廃液タンク13H内の廃液の程度を検出し、オペレータに通知する機能を搭載している。
【0040】
カートリッジ収容部130内には、2個のモデル材カートリッジ13Mと、2個のサポート材カートリッジ13Sとが収容可能であり、両カートリッジを交互に使用することにより、造形処理を中断させることなく空になったカートリッジを交換することができる。
【0041】
<ヘッドユニット111>
図3は、図2のヘッドユニット111の概略構成の一例を示した図であり、図中の(a)には、ヘッドユニット111をy方向(ヘッドユニット111の副走査方向)から見た様子が示され、(b)には、x方向(ヘッドユニット111の主走査方向)から見た様子が示され、(c)には、z方向から見た様子が示されている。
【0042】
このヘッドユニット111は、サポート材用ノズルユニット31、モデル材用ノズルユニット32、y走査用ホルダユニット33、ローラーユニット34及びランプユニット35により構成され、これらのユニット31〜35を一体的に保持している。ユニット31〜35は、この順に、x方向に配列されている。
【0043】
なお、x軸方向に沿うサポート材用ノズルユニット31、モデル材用ノズルユニット32、ローラーユニット34及びランプユニット35の配列の基本的な考え方は、以下の通りである。ヘッドユニット111の主走査方向の往路方向をベースに考えると、サポート材用ノズルユニット31、モデル材用ノズルユニット32は、いずれか一方が他方の前方に位置すればよい。このようなノズルユニットのレイアウトに対して、ローラーユニット34ならびにランプユニット35は、ローラーの作用を往路で行いたい場合は、往路進行方向において、サポート材用ノズルユニット31、モデル材用ノズルユニット32の後方にローラーユニット34、ランプユニット35の順で配置し、ローラーの作用を復路で行いたい場合は、サポート材用ノズルユニット31、モデル材用ノズルユニット32の復路の進行方向において後方にローラーユニット34、ランプユニット35の順で配置すればよい。
【0044】
また、上記実施例においては、ヘッドユニット111から新たな最上層となるための樹脂を吐出させた後、造形途中の未硬化状態の最上層の樹脂層に対して、ローラーユニット34による余剰樹脂の掻き取りを行った後、ランプユニット35によって少なくとも最上層の樹脂層に対する硬化のためのUV光を照射する方法を採用した。
【0045】
しかし、これ以外にも、ヘッドユニット111から新たな最上層となるための樹脂を吐出させた後、余剰樹脂層を含む最上層に対して、ランプユニット35によって一旦光を照射した後、造形途中の未硬化状態の最上層の樹脂層に対して、ローラーユニット34による余剰樹脂の掻き取りを行い、その後再度ランプユニット35によって少なくとも最上層の樹脂層に対する硬化のためのUV光を照射する方法もある。
【0046】
この場合、ランプユニット35は、ヘッドユニット111において、x方向、つまりヘッドユニット111の主走査方向で、サポート材用ノズルユニット31、モデル材用ノズルユニット32を挟む前後方向に一対のランプユニット35を設けることにより、上述のような二度の照射を行うことができる。また、この場合、一度目の照射と二度目の照射を合わせて、最終的に所望する樹脂の硬化の程度を達成するようになるため、一度目の照射後の樹脂は硬化状態ではなく、まだその後のローラーユニット34による掻き取り動作のために、流動可能な、半硬化状態である。このため、この場合においても、ローラーユニット34による樹脂の掻き取り前の最上層の状態は、未硬化または流動可能な状態と表現することとする。
【0047】
モデル材用ノズルユニット32は、モデル材カートリッジ13Mから供給されるモデル材Mを吐出するためのノズルユニットであり、モデル材Mを一時的に収容するリザーブタンク321と、造形ステージ112に対しモデル材Mを吐出する複数の吐出口2がy方向に配列された造形材ノズル322からなる。
【0048】
サポート材用ノズルユニット31は、サポート材カートリッジ13Sから供給されるサポート材Sを吐出するためのノズルユニットであり、サポート材Sを一時的に収容するリザーブタンク311と、サポート材Sを吐出する複数の吐出口2がy方向に配列された造形材ノズル312からなる。
【0049】
モデル材Mやサポート材Sは、造形材ノズル322ならびに312の各々に設けられる吐出口2ごとにノズルユニット内に設けられる圧電素子の振動を利用することにより、吐出口2から液滴となって射出される。吐出口2は一定ピッチでy方向において直線上に配置されている。
【0050】
ヘッドユニット111は、造形材ノズル312,322から造形材を吐出させながらx方向に走査することにより、造形材ノズル312,322の各々に設けられる全ての吐出口2の配列長さに対応する所定幅の造形材層を1回の主走査によって造形ステージ112上に形成することができる。
【0051】
y走査用ホルダユニット33は、ヘッドユニット111を副走査方向へ走査するために、x走査用係合溝113間を結ぶ橋梁体に支持されている。このy走査用ホルダユニット33が上記橋梁体に支持されるとともに、橋梁体上に設けられる図示しない駆動部により、橋梁体に設けられる図示しないy方向(ヘッドユニット111の副走査方向)に延びる軸に沿ってヘッドユニット111を駆動する構造となっている。なお、ヘッドユニット111のy方向(ヘッドユニット111の副走査方向)の駆動方式としては、ヘッドユニット111自体に駆動部を内蔵させ、上述した軸上を移動させるようにしてもよい。
【0052】
ローラーユニット34は、膜厚調整用ローラー341と、このローラー341を回転させる駆動部(図示せず)と、膜厚調整用ローラー341によって造形ステージ112上に形成される造形材層の最表面から掻き取られた造形材を使用済み造形材として一時的に収容するローラードレイントレイ(後述)からなる。
【0053】
膜厚調整用ローラー341は、造形ステージ112上に吐出し堆積させた造形材膜の厚さを調整する。より詳細に説明すれば、膜厚調整用ローラー341は、造形材ノズル312,322から吐出された造形材にて形成された最表面層の一部を、ランプユニット35にて硬化させる前に所定の厚みを掻き取ることにより、最表面層の厚みの最適化を図っている。また、膜厚調整用ローラー341は、造形材膜の表面を平坦化するためのローラーでもあり、y方向の回転軸を中心として回転する。より詳細に説明すれば、膜厚調整用ローラー341が作用する際のヘッドユニット111の進行方向に対して、膜厚調整用ローラー341は、順方向に回転する。膜厚調整用ローラー341にて掻き取られ、上記ローラードレイントレイ内に収容された造形材は、使用済み造形材からなる廃液として廃液タンク13Hへ送られる。
【0054】
ランプユニット35は、造形ステージ112上に吐出し堆積させた造形材膜にUV光を照射するためのUVランプ351からなり、吐出口2の配列長さよりも幅が広い照射エリアを造形ステージ112上に形成することができる。
【0055】
図3に示すランプユニット35のレイアウトを採用した場合は、図の左から右にヘッドユニット111を移動させる、いわゆる主走査の往路においては、ランプユニット35は、造形材ノズル312,322よりも先行した位置に配置されるため、往路に吐出した造形物の表面にUV光を照射することがない。従って、点灯制御を容易化するため、常時点灯していてもよい。実際のUV光の照射は、復路において、膜厚調整用ローラー341が造形物の最表面の厚みを適正化した後の最表面に対して行われることとなる。
【0056】
なお、ここでのランプユニット35は、UV光を照射する光源であれば、UV光照射用ランプに限る必要はなく、UV光を照射するLED光源も含むものである。つまり、UV光などの樹脂硬化に必要な特定波長の光を照射する樹脂硬化用の光照射手段である。更に、光硬化型の樹脂に代えて、造形用樹脂として所定の温度によって硬化するような熱可塑性樹脂を採用するのであれば、本発明のランプユニット35に代えて、樹脂硬化手段として、冷却または加熱手段を採用したり、場合によっては、不要な場合もある。
【0057】
<造形処理>
図4は、図2の3次元造形装置10における造形時の動作の一例を模式的に示した説明図であり、造形ステージ112上に立体造形物が形成される様子が示されている。図中には、立体造形物を造形中の3次元造形装置10におけるヘッドユニット111及び造形ステージ112をzx面に平行な鉛直面で切断した場合の切断面の様子が示されている。
【0058】
モデル材M及びサポート材Sは、造形ステージ112に対し、主走査方向(x方向)の走査中にヘッドユニット111から下方へ液滴3となって吐出される。主走査往路時に造形ステージ112上に吐出し堆積させたこれらの造形材からなる造形材層は、主走査復路において、膜厚調整用ローラー341により膜厚が調整され、UVランプ351によるUV光の照射によって硬化する。なお、上記の説明では、モデル材M及びサポート材Sの吐出を、主走査の往路方向にて行うと共に、ヘッドユニット111の主走査の復路において行っても良い。また、モデル材M及びサポート材Sの吐出を、ヘッドユニット111の主走査の復路単独で行ってもよい。
【0059】
本実施の形態におけるモデル材M及びサポート材Sは、共にUV硬化性の樹脂であり、同一のUVランプ351によりUV光が照射されることにより硬化する。なお、3次元造形装置10に使用可能な樹脂としては、光硬化性の樹脂の他に、熱を与えて硬化させる熱硬化性の樹脂や、自然冷却により硬化する熱可塑性樹脂を用いることもできる。
【0060】
ヘッドユニット111のy方向の長さ(ヘッド幅)に対応する一定幅の帯状領域は、フィールドと呼ばれ、あるフィールドについて、造形材層の形成が完了すれば、ヘッドユニット111を副走査方向(y方向)へ移動させ、隣接するフィールドに対する造形材層の形成が開始される。どの程度ヘッドユニット111を副走査方向(y方向)へ移動させるかは、造形ステージ112上にて形成する造形物をどのような位置に配置させるかによって決定され、その決定は、造形依頼者端末20における依頼者の入力に基づいて行われる。
【0061】
ヘッドユニット111は、x走査用係合溝113間をy方向に跨ぐ門型の橋梁体に支持され、一対のx走査用係合溝113に沿って主走査方向に走査される。なお、本実施の形態では、門型の橋梁体にヘッドユニット111を支持させ、一対のx走査用係合溝113に沿ってヘッドユニット111を主走査方向に移動させる構成としたが、x走査用係合溝113を1本とし、ヘッドユニット111を片持ちで支持した状態で主走査方向に移動させる構成としても良い。
【0062】
ヘッドユニット111に配設されたモデル材用ノズルユニット32及びサポート材用ノズルユニット31により造形可能なy方向の幅は造形ステージ112上の造形エリアに対して短いため、ヘッドユニット111を主走査方向へ往復移動させて1フィールド分の造形が完了すると、ヘッドユニット111を副走査方向(y方向)に移動させて隣接するフィールドの造形が行われる。ユーザが設定した立体造形物が1フィールド内に収まる場合には、ヘッドユニット111の副走査方向への移動は行われない。なお、ヘッドユニット111による造形可能なy方向の幅が造形ステージ112上の造形エリアのy方向の幅よりも同一又は大きい場合には、ヘッドユニット111は副走査方向へ移動させながら造形する必要はなく、副走査方向への移動機構は不要となる。
【0063】
造形ステージ112上には、上述したヘッドユニット111の主走査及び副走査によって造形材層がフィールドごとに形成され、立体造形物を構成する1つの樹脂層が形成される。この樹脂層は、スライス層と呼ばれ、あるz方向の位置でスライス層の形成が完了すれば、造形ステージ112をスライス層の厚さに相当する距離だけ下方向(z方向)へ移動させ、次のスライス層の形成が開始される。
【0064】
この3次元造形装置10では、着脱可能な可搬プレート41の上面が造形ステージ112であり、可搬プレート41と、可搬プレート41が載置されるプレート取付台42とから、z方向に移動可能なz移動ユニット40が構成される。z移動ユニット40は、z駆動装置43によりz方向の位置が調整される。z駆動装置43は、ヘッドユニット111と造形ステージ112との間の高さ方向の相対位置を変化させる垂直駆動手段である。可搬プレート41は、矩形状の金属板からなり、造形依頼者端末20から指示した全ての造形が完了した時点で、立体造形物を載せたままの状態で、プレート取付台42から取り外すことができる。プレート取付台42には、可搬プレート41を固定するための固定機構(図示せず)が設けられる。
【0065】
立体造形物は、モデル材Mによって構成され、サポート材Sは、立体造形物のオーバーハング部分や孤立部分を支持し、最終的には所定の方法によって除去される。例えば、モデル材Mとして、水に対し不溶性又は難溶性の樹脂を用い、サポート材Sとして、易溶性の樹脂を用いれば、可搬プレート41上に形成された造形物を取り出して水に浸すことにより、サポート材Sからなる造形材層だけを容易に除去することができる。また、言うまでもなく、造形物としてのモデル材Mからサポート材Sの除去は、従来通り、手を用いてモデル材Mからサポート材Sを外すようにしても良い。
【0066】
この例では、可搬プレート41上に形成された下地層SS上にモデル材M及びサポート材Sからなるスライス層を積層形成することによって所望の立体造形物が形成される。下地層SSは、可搬プレート41の傾きや表面の凹凸を吸収し、また、造形物を剥離し易くするサポート材Sからなる。さらに、この下地層SSは、可搬プレート41の傾きや表面の凹凸を吸収できるのであれば、造形依頼者端末20における造形条件において、中実の構造以外に格子状などの中空構造を採用することにより、材料の使用量の低減を図ることもできる。
【0067】
<主走査>
図5は、図2の3次元造形装置10における造形時の動作の一例を模式的に示した説明図であり、図中の(a)には、x方向の主走査往路の様子が示され、(b)には、主走査復路の様子が示されている。主走査往路では、z方向に関して造形ステージ112の位置がヘッドユニット111から離間した位置に固定され、モデル材Mやサポート材Sが造形材ノズル312,322から吐出される。造形ステージ112上には、これらの造形材からなる造形材層4が形成される。
【0068】
なお、図5(a)に開示するヘッドユニット111と造形ステージ112との間の距離と、図5(b)に開示するヘッドユニット111と造形ステージ112との間の距離とは明らかに異なるように示しているが、これは動作の内容をわかりやすく説明するためであり、実際は、図5(a)の状態でのヘッドユニット111と造形ステージ112との間の距離は2mm以下であり、図5(b)におけるその距離は、図5(a)の状態から造形ステージ112をz方向で且つヘッドユニット111に近づくように1mm以下の距離を移動させるようになっている。
【0069】
造形材層4の厚みはユーザが造形精度や造形速度の観点から決定することができる。つまり、ユーザが造形精度を優先することを選択すれば、造形材層4の厚みは設定可能な最小の厚み又はその近傍の厚みに設定し、造形速度を優先することを選択すれば、最低限の造形精度を維持した厚みに設定すればよい。このような選択は、造形依頼者端末20において形状情報以外の造形条件として選択、設定することができるようになっている。
【0070】
主走査復路の走査は、膜厚調整用ローラー341が造形材層4と接触する位置まで造形ステージ112を上方へ移動させた状態で行われる。この主走査復路では、主走査往路での造形材の吐出に加え、モデル材Mやサポート材Sが造形材ノズル312,322から吐出させることも可能であり、主走査往路や復路で吐出し堆積させた造形材層4の上層部が膜厚調整用ローラー341によって掻き取られる。
【0071】
造形材ノズル312,322に配設された各ノズルからの造形材の吐出量には個体差があり、また、予め設定された厚みの造形材層4が正確に得られるように、造形材ノズル312,322からの造形材の吐出量を制御するのは困難であるため、少なくとも各造形層を形成する単位で、造形材ノズル312,322からは設定された厚み以上の造形材を吐出し、余分な造形材を膜厚調整用ローラー341により掻き取って回収することで、予め設定された厚みの造形材層4を維持し、均一な厚みの造形材層4を積層することができる。但し、膜厚調整用ローラー341を、その時点での造形層の最表面に当接させるタイミングは、造形データとしての各スライス層データ単位での最表面で行う必要はなく、造形の種々の狙い、例えば、造形精度と造形速度の両立の観点から、必要なタイミングにて行うことができる。
【0072】
膜厚調整用ローラー341は、主走査の往路及び復路に関わらず、一定の回転数で同じ向きに回転する。UVランプ351は、造形材の種類や造形材層4の厚さ、x方向の走査速度に応じた所定の光度で点灯し、主として、膜厚調整用ローラー341による膜厚調整後の造形材層4をUV光の照射によって硬化させる。
【0073】
次に、廃液タンク13H内における廃液の蓄積量が一定量を越えたことを詰まり検出用の圧力センサを用いて検知する構成について、図6〜図14を用いて説明する。
【0074】
<廃液トレイ>
図6は、使用済み造形材からなる廃液を一時的に収容する廃液トレイの構成例を示した図である。図中の(a)は、図2のパージトレイ114の構成例を示した断面図であり、パージトレイ114付近をzx面に平行な鉛直面で切断した場合の切断面が示されている。このパージトレイ114は、矩形状の底板50を側壁が取り囲む形状からなる受皿部である。
【0075】
パージトレイ114の側壁は、天板116に接合され、底板50には、廃液を吸い込むための吸込口51が設けられている。また、底板50には、下面から突出する接続部が設けられ、パージトレイ114内の廃液を廃液タンク13Hへ移送するための廃液管52が接続されている。パージトレイ114内に収容された廃液は、吸込口51を介して吸引され、廃液管52内を通って廃液タンク13Hへ移送される。
【0076】
図中の(b)は、図3のヘッドユニット111におけるローラーユニット34内のローラードレイントレイ343の構成例を示した斜視図である。このローラーユニット34は、膜厚調整用ローラー341、ブレード342、ローラードレイントレイ343及び吸引パイプ344からなる。
【0077】
ブレード342は、膜厚調整用ローラー341に付着した造形材を掻き取り、ローラードレイントレイ343内へ誘導するための掻き取り部材であり、薄い板状体からなる。ローラードレイントレイ343は、ブレード342によって掻き取られた造形材を使用済み造形材として一時的に収容するための受皿部であり、使用済み造形材からなる造形材液が廃液として保持される。
【0078】
吸引パイプ344は、ローラードレイントレイ343内の廃液を吸引して廃液タンク13Hへ移送するための廃液管である。ローラードレイントレイ343内に収容された廃液は、吸引パイプ344の先端から吸引され、吸引パイプ344内を通って廃液タンク13Hへ移送される。
【0079】
<廃液ポンプ60>
図7は、パージトレイ114やローラードレイントレイ343内の廃液を廃液タンク13Hへ流入するための廃液ポンプ60の構成例を示した断面図であり、廃液ポンプ60の正回転時の様子が示されている。この図では、ローター61の駆動部が省略されている。
【0080】
廃液ポンプ60は、正回転及び逆回転可能なローター61を有し、正回転させることにより、パージトレイ114又はローラードレイントレイ343内の廃液を廃液タンク13Hへ流入させるポンプである。その様な廃液ポンプ60には、2つのローラー62が配設されたローター61と、廃液が管内へ流入されるチューブ63と、ポンプ筐体64からなるチューブポンプが用いられる。このチューブポンプは、ローラー62によってチューブ63内の廃液を押し出す絞り出し方式のポンプである。
【0081】
ローター61は、回転軸を中心として回転する円板状の回転体であり、周面から突出するようにローラー62が配設されている。ローラー62は、その回転軸がローター61の回転軸と平行であり、ポンプ筐体64の内周面とローター61の周面との間に周面に沿って配置されたチューブ63の一部分を押し潰す。
【0082】
各ローラー62は、ローター61の回転軸を挟んで互いに反対側に配置されている。チューブ63は、ローラー62の押圧力によって弾性変形する廃液管であり、両端がポンプ筐体64から引き出されている。ローター61を回転させることにより、ローラー62がローター61とは反対方向に回転し、ローラー62によって押し潰されるチューブ63の位置が移動する。この作用により、チューブ63の一端から廃液が吸引され、他端から吐出される。
【0083】
正回転時には、チューブ63の一端が廃液の吸込口63aとなり、チューブ63の他端が廃液の吐出口63bとなる。吐出口63bを介して吐出された廃液は、廃液管を通って廃液タンク13Hへ流入する。一方、ローター61を逆回転させることにより、廃液を逆流させることができる。逆回転とは、ローター61を正回転時とは反対方向へ回転させることであり、吐出口63bから吸引された廃液は、チューブ63内を通って吸込口63aから吐出される。
【0084】
<廃液タンク13H>
図8は、図2の廃液タンク13Hの構成例を示した断面図であり、廃液タンク13Hをzx面に平行な鉛直面で切断した場合の切断面が示されている。この廃液タンク13Hは、廃液を貯留するためのタンク本体132と、タンク本体132を収容する直方体形状のカートリッジ筐体131と、タンク本体132の注入口72に被せるためのタンクキャップ73により構成される。
【0085】
タンク本体132は、折り畳んで収納することができる袋状の容器であり、例えば、ポリエチレン又はポリプロピレン樹脂からなる。タンク本体132の容積、すなわち、タンク本体132内に収容可能な廃液の量は、パージトレイ114及びローラードレイントレイ343に比べて十分に大きい。注入口72は、鉛直上方に向けて固定される。例えば、注入口72は、カートリッジ筐体131の上板71に設けられた開口を介して引き出された注入口72の下面を上板71の上面に当接させることにより、固定される。
【0086】
タンクキャップ73は、注入口72を覆う皿状の蓋からなり、廃液管接続部73a,73b及び通気孔73cが上板に設けられている。廃液管接続部73aは、廃液ポンプ60に接続された廃液管53を接続するための係合部であり、タンクキャップ73の上面から鉛直上方へ突出する形状からなる。廃液管接続部73bは、タンク本体132内に収容される廃液管54を接続するための係合部であり、タンクキャップ73の下面から鉛直下方へ突出する形状からなる。
【0087】
廃液管53を通り、廃液管接続部73aを介して流入された廃液は、廃液管54の下端から排出され、タンク本体132内に蓄積される。通気孔73cは、タンク本体132内の空気を外部へ排出するための貫通孔からなる。
【0088】
廃液の液面A1は、タンク本体132内における廃液の蓄積量が増えるに従って上昇する。廃液管54の下端は、廃液の蓄積量が一定量以下であれば、液面A1よりも高い位置にある。一方、廃液管54の下端は、廃液の蓄積量が一定量を越えれば、液面下となる(液面A1がA2に位置する場合)。
【0089】
廃液ポンプ60のローター61を逆回転させた場合、廃液管54の下端が液面よりも下側に位置すれば、タンク本体132内の廃液が廃液管54を介して吸引される。一方、廃液管54の下端が液面よりも上側に位置すれば、タンク本体132内の空気が廃液管54を介して吸引される。
【0090】
廃液管54の下端が液面下にあって、廃液を吸引する場合と、廃液管54の下端が液面上にあって、空気を吸引する場合とでは、廃液管53,54内の圧力が大きく異なることから、廃液ポンプ60の逆回転時における廃液管53,54内の圧力を測定することにより、タンク本体132内の液面が廃液管54の下端に到達したことを検出することができる。廃液管54の長さを調節することにより、検知対象とする液面の位置を調整することができる。
【0091】
この廃液タンク13Hには、廃液タンク13Hの重さを測定し、廃液タンク13H内における廃液の蓄積量が一定量を越えたことを検知するための重量センサ80が配設されている。重量センサ80は、検出面に付加される圧力を検出する圧力センサからなり、例えば、応力によって抵抗体が変形した際の電気抵抗の変化量からひずみ量を求めて応力を検出するひずみゲージが用いられる。
【0092】
この様な重量センサ80を用いて廃液タンク13Hの重さを測定することにより、廃液タンク13H内における廃液の蓄積量が一定量を越えたことを検知することができ、廃液が廃液タンク13Hの通気孔73cを介して溢れ出ることを事前に認識することができる。
【0093】
<モニター画面21>
図9は、図2の3次元造形装置10における動作の一例を示した図であり、造形処理中のモニター画面21が示されている。このモニター画面21には、モデル材カートリッジ13Mごとのモデル材Mの残量と、サポート材カートリッジ13Sごとのサポート材Sの残量と、カートリッジ13M,13Sの交換の推奨時刻と、使用中のカートリッジを示すアイコンと、廃液タンク13H内の造形材の蓄積量が表示されている。
【0094】
3次元造形装置10の操作表示部12には、図9に示すように、造形中のモデル材カートリッジ13M、サポート材カートリッジ13Sの残量及び交換推奨時刻、廃液タンク13Hの蓄積量が表示される。これにより、操作者は、モデル材カートリッジ13M、サポート材カートリッジ13Sを交換すべきタイミングや、廃液タンク13H内に蓄積された廃液を廃棄すべきか否かを視覚的に認識することができる。廃液タンク13Hに蓄積された廃液の蓄積量は、重量センサ80が測定した測定値に基づいて算出され、操作表示部12に表示される。
【0095】
廃液タンク13Hに蓄積された廃液の蓄積量が所定量以上に達した場合、すなわち、重量センサ80の測定値が所定値以上に達した場合は、操作表示部12に廃液タンク13H内に蓄積された廃液の廃棄を促すメッセージが表示される。または、廃液タンク13Hからの廃液の溢れ出しを確実に防止するために造形処理を強制的に中断する。
【0096】
また、造形処理の開始時には、これから造形する造形物において発生する廃液量と既に蓄積された廃液量とに基づいて、造形の途中で廃液タンク13H内に蓄積される廃液量が所定量以上になることが事前に判明している場合には、造形処理を開始させないか、あるいは、造形開始時に操作者にその旨を知らせるメッセージを表示させることができる。
【0097】
なお、本実施例では、廃液の蓄積量を検出する蓄積量検出センサとして重量センサ80を用いたが、これに代わり、液面の位置を検出するフロートセンサを廃液タンク13H内に設けて、液面の位置から廃液の蓄積量を検知する構成としてもよい。
【0098】
しかし、重量センサ80に経時劣化等による検出精度の低下や故障が発生した場合は、廃液タンク13H内の廃液の蓄積量を正しく検知できないことがある。また、袋状の容器からなるタンク本体132がカートリッジ筐体131内に十分に展開していない場合は、廃液タンク13Hの重さが一定値を越える前に、廃液が廃液タンク13Hから溢れ出てしまうことも考えられる。この様な場合であっても、廃液ポンプ60の逆回転時における廃液管53,54内の圧力を測定することにより、タンク本体132内の液面が廃液管54の下端に到達したことを正しく検知することができ、廃液が廃液タンク13Hから溢れ出ることを事前に検知することができる。
【0099】
廃液ポンプ60を逆回転させて、廃液管53、54内の圧力を測定した結果、タンク本体132内の液面が廃液管54の下端に到達したことを検知した場合は、操作表示部12にその旨を表示すると共に、造形処理は強制的に中断される。なお、本実施例では、3次元造形装置10の操作表示部12に廃液の廃棄を促す報知を行うこととしたが、ネットワークで接続された造形依頼者端末20に報知を行う構成として良い。
【0100】
<廃液移送経路>
図10は、パージトレイ114及びローラードレイントレイ343から廃液タンク13Hまで廃液を移送する廃液移送経路の一例を示したブロック図である。この廃液移送経路は、パージトレイ114から廃液タンク13Hへ廃液を移送するための第1移送路と、ローラードレイントレイ343から廃液タンク13Hへ廃液を移送するための第2移送路とからなり、分岐部56で分岐している。
【0101】
第1移送路は、廃液ポンプ60aを介して、パージトレイ114と分岐部56とを接続する廃液管55aと、分岐部56と廃液タンク13Hとを接続する廃液管55cとで構成される。第2移送路は、廃液ポンプ60bを介して、ローラードレイントレイ343と分岐部56とを接続する廃液管55bと、廃液管55cとで構成される。すなわち、パージトレイ114及びローラードレイントレイ343に一時的に蓄積された廃液を廃液タンク13Hへ移送するための廃液管は、廃液管55a〜55cからなる。
【0102】
なお、本実施の形態では、第1移送路及び第2移送路は、廃液ポンプ60a及び60bよりも廃液タンク13H側に分岐部56を設け、当該分岐部56にて廃液を合流させてから、廃液タンク13Hへ廃液を運ぶ移送路としているが、分岐部56を設けずに各々の廃液移送路を個別に廃液タンク13Hに接続してもよい。その場合は、パージトレイ114から廃液を移送する廃液管は、第1移送路のことを示し、ローラードレイントレイ343から廃液を移送する廃液管とは、第2移送路を示す。
【0103】
廃液ポンプ60aのローター61を正回転させることにより、第1移送路を介してパージトレイ114内の廃液が廃液タンク13Hへ流入される。また、廃液ポンプ60bのローター61を正回転させることにより、第2移送路を介してローラードレイントレイ343内の廃液が廃液タンク13Hへ流入される。廃液ポンプ60a及び60bは、廃液管55a,55bからなる移送路の中間部に介装される。なお、本実施の形態では、廃液ポンプ60a及び60bとしてチューブポンプを用いたが、これに限らずピストンポンプやダイアフラムポンプを用いてもよいことは云うまでもない。
【0104】
圧力センサ91〜93は、廃液管55a〜55c内の圧力を測定し、廃液管の詰まりを検知するためのセンサであり、例えば、隔膜(ダイアフラム)の変形量から圧力を検出するダイアフラムゲージが用いられる。
【0105】
圧力センサ91は、第1移送路における廃液ポンプ60aよりも上流側、すなわち、パージトレイ114側に設けられ、パージトレイ114と圧力センサ91との間における廃液管55aの詰まりを検出するのに用いられる。また、圧力センサ92は、第2移送路における廃液ポンプ60bよりも上流側、すなわち、ローラードレイントレイ343側に設けられ、ローラードレイントレイ343と圧力センサ92との間における廃液管55bの詰まりを検出するのに用いられる。
【0106】
圧力センサ93は、分岐部56よりも下流側、すなわち、廃液タンク13H側に設けられ、圧力センサ93と廃液タンク13Hとの間における廃液管55cの詰まりを検出するのに用いられる。圧力センサ93は、廃液ポンプ60aに接続された廃液管55aと、廃液ポンプ60bに接続された廃液管55bとの合流点の近傍であって、当該合流点よりも廃液タンク13H側に配置されている。
【0107】
廃液ポンプ60aの正回転時に、圧力センサ91よりも上流側で廃液管55aの詰まりが生じれば、一定レベルを越える負圧が検出されることになる。また、廃液ポンプ60bの正回転時に、圧力センサ92よりも上流側で廃液管55bの詰まりが生じれば、一定レベルを越える負圧が検出されることになる。一方、廃液ポンプ60a又は60bの正回転時に、圧力センサ93よりも下流側で廃液管55cの詰まりが生じれば、一定レベルを越える正圧が検出されることになる。
【0108】
廃液タンク13Hの液面検出には、圧力センサ93が用いられ、廃液タンク13H内における廃液の液面が廃液管54の下端に到達したことは、廃液ポンプ60aの逆回転時における圧力センサ93の出力に基づいて、検出される。詰まり検出時には、正圧を検出し、液面検出時には、負圧を検出する必要があることから、圧力センサ93には、正圧及び負圧の測定可能なセンサが用いられる。
【0109】
図11は、廃液ポンプ60aを逆回転させた際に、圧力センサ93により測定される圧力の変化を示した図であり、図中の(a)には、図8の廃液タンク13H内における液面の位置がA1である場合が示され、(b)には、液面の位置がA2である場合が示されている。
【0110】
廃液タンク13H内に蓄積された廃液の液面がA1である場合、廃液管54の下端は、液面A1よりも上側に位置し、廃液ポンプ60aを逆回転させたとしても、廃液タンク13H内の空気が吸引されるだけである。このため、廃液ポンプ60aの逆回転開始後、廃液管内に残留する残留物が吸引されることに起因して一時的に圧力が低下するものの、その変化量は(−5kPa)程度と小さく、概ね一定値(0kPa)が維持されている。
【0111】
これに対し、廃液の液面がA2である場合には、廃液管54の下端が、液面A1よりも下側に位置することから、廃液ポンプ60aを逆回転させることにより、廃液タンク13H内に蓄積された廃液が吸引される。このため、廃液ポンプ60aの逆回転開始後、圧力は、著しく低下している。
【0112】
具体的に説明すれば、圧力は、廃液の粘性により経路長に応じた圧力損失があることから、廃液が廃液管54の下端から圧力センサ93に到達するまでの間、徐々に低下し、逆回転を開始してから10秒程度経過した時点で、(−15kPa)に飽和している。
【0113】
従って、廃液タンク13H内の液面が廃液管54の下端に到達したか否かを判定するためには、液面判定閾値をB=−12kPa程度と定め、圧力センサ93により測定される圧力をその液面判定閾値と比較すれば良い。
【0114】
また、逆回転時の飽和圧力は、廃液ポンプ60aのローター61を回転させる回転速度を速くするほど、低くなる。このため、逆回転時の回転速度を正回転時よりも速くすることにより、廃液管54の下端が液面下にある場合の圧力を廃液管54の下端が液面上にある場合に比べて十分に低くすることができ、廃液タンク13H内の蓄積量が一定量を越えたか否かの検出精度を向上させることができる。
【0115】
図12は、図1の3次元造形装置10内の機能構成の一例を示したブロック図である。この3次元造形装置10は、廃液ポンプ60a,60b、重量センサ80、圧力センサ91〜93、操作部121、表示部122、ネットワーク通信部400、造形ジョブ記憶部401、造形処理部402、詰まり判定閾値記憶部403、比較部404,407,410、詰まり検出部405、液面判定閾値記憶部406、液面検出部408、蓄積量判定閾値記憶部409及び廃棄要否判定部411により構成される。
【0116】
ネットワーク通信部400は、LAN1経由で造形依頼者端末20から受信した造形データを造形ジョブ記憶部401内に格納する。造形ジョブ記憶部401には、造形依頼者端末20から取得した複数の造形ジョブが保持される。
【0117】
造形ジョブは、造形データとその属性情報とからなり、造形ジョブの識別情報に関連付けて保持される。造形データの属性情報には、造形データの識別情報、造形データの送受信日時、造形依頼者の識別情報などが含まれる。また、この造形データには、造形に必要なモデル材M及びサポート材Sの量や、造形時に造形に用いられずに廃棄される廃液量の情報も含む。なお、これら造形に必要な造形材の量や廃液量は、造形依頼者端末20にて算出し、3次元造形装置10に造形データの一部として送信してもよいし、造形依頼者端末20から受信した造形データの形状情報に基づいて3次元造形装置10内で計算し、造形ジョブ記憶部401に記憶してもよい。
【0118】
造形処理部402は、造形ジョブ記憶部401内の造形データに基づいて、造形ステージ112上に造形対象物を形成するための造形処理を行う。この造形処理は、例えば、造形操作者による造形指示に基づいて開始され、ヘッドユニット111のxy駆動制御、造形ステージ112のz駆動制御、造形材ノズル312,322内の圧電素子を駆動することによる造形材の吐出制御、UVランプ351を駆動することによる造形材の硬化制御、廃液ポンプ60a,60bの駆動制御が行われる。
【0119】
造形処理の開始時や造形処理中には、パージ処理が実行される。造形処理中におけるパージ処理は、定期的に行われる。例えば、パージ処理は、一定時間が経過するごとに実行される。或いは、予め定められたメンテナンススケジュールに従って、パージ処理が実行される。
【0120】
操作部121は、3次元造形装置10の操作者を造形操作者と呼ぶことにすれば、造形操作者による操作を受け付けると、その操作内容に応じた操作信号を造形処理部402へ出力する。
【0121】
詰まり判定閾値記憶部403には、廃液管の詰まりを検出するための詰まり判定閾値TMが保持される。具体的には、廃液管55a及び55bの詰まりを検出するための判定閾値TMa及びTMbがそれぞれ保持され、廃液管55cの詰まりを検出するための判定閾値TMcが保持される。判定閾値TMa及びTMbは、いずれも負の数であり、判定閾値TMcは、正の数である。
【0122】
比較部404は、廃液ポンプ60a又は60bの正回転時に、圧力センサ91〜93によって測定された圧力を判定閾値TMa〜TMcと比較し、その比較結果を詰まり検出部405へ出力する。詰まり検出部405は、比較部404の比較結果に基づいて、廃液管55a〜55cの詰まりを検出し、その検出結果を造形処理部402及び表示部122へ出力する。
【0123】
造形処理部402は、造形処理の実行中に廃液管55a〜55cの詰まりが検出されれば、当該造形処理を中断する。表示部122は、廃液管55a〜55cの詰まりが検出されれば、廃液管に詰まりが生じたことを示すメッセージを表示する。
【0124】
液面判定閾値記憶部406には、廃液タンク13H内の液面が廃液管54の下端に到達したことを検出するための液面判定閾値EMが保持される。この液面判定閾値EMは、負の数であり、廃液タンク13H内の液面が廃液管54の下端に到達していない場合における圧力の変動幅に応じて予め定められる。
【0125】
比較部407は、廃液ポンプ60aの逆回転時に、圧力センサ93によって測定された圧力を液面判定閾値EMと比較し、その比較結果を液面検出部408へ出力する。液面判定閾値EMと比較させる圧力には、廃液管54の下端から吸引された廃液が圧力センサ93に到達するまでの間の圧力変動を考慮して、廃液ポンプ60aの逆回転駆動が開始されてから一定時間Tが経過した時点での検出値が用いられる。時間Tは、固定値であっても良いが、廃液管54の下端から圧力センサ93までの経路長と、ローター61の回転速度とに応じて異ならせても良い。
【0126】
液面検出部408は、比較部407の比較結果に基づいて、廃液タンク13H内における廃液の液面が廃液管54の下端に到達したことを検出し、その検出結果を廃棄要否判定部411へ出力する。
【0127】
蓄積量判定閾値記憶部409には、廃液タンク13H内の蓄積量が一定量を越えたことを検出するための蓄積量判定閾値TSが保持される。比較部410は、重量センサ80により測定された重さを蓄積量判定閾値TSと比較し、その比較結果を廃棄要否判定部411へ出力する。
【0128】
廃棄要否判定部411は、廃液タンク13Hから廃液が溢れ出るのを事前に検知するために、廃液タンク13Hが満充填状態であるか否かを判定し、蓄積された廃液の廃棄が必要であるか否かを判定する。廃液タンク13Hが満充填状態であるか否かは、液面検出部408の検出結果と比較部410の比較結果とに基づいて、廃液タンク13H内における廃液の蓄積量が一定量を越えたか否かによって判定され、その判定結果が造形処理部402及び表示部122へ出力される。廃液タンク13Hが満充填状態であるか否かの判定は、例えば、パージ処理の開始前に行われる。このため、パージ処理の実行中に、廃液タンク13Hが満充填状態になるのを防止することができる。
【0129】
廃棄要否判定部411は、重量センサ80の測定値と蓄積量判定閾値TSとを比較する比較部410の比較結果と、液面検出部408の検出結果の双方から、廃液タンク13Hの満充填状態を検出することができる。具体的には、基本的に重量センサ80が正常に動作している状態では重量センサ80の測定値に基づいて満充填状態を検出し、仮に重量センサ80に故障が生じるなどして比較部410から正確な比較結果が得られなかったり、重量センサ80の測定値に基づく警告を無視して造形処理を継続した場合には、液面検出部408の検出結果に基づいて満充填状態が検出される。
【0130】
したがって、液面検出部408が満充填状態として検出する廃液の蓄積量を定める廃液管54の長さと、重量センサ80の測定値と比較される蓄積量判定閾値TSは、上述した条件を満足するように定められている。これにより、重量センサ80が正常に動作しているにも関わらず、廃液タンク13H内の廃液の蓄積量が廃液管54の下端に到達し、廃液ポンプ60aを逆回転させた際にパージトレイ114まで廃液が逆流することを防止することができる。
【0131】
なお、本実施の形態では、廃液ポンプ60a,60bとしてチューブポンプを用いたが、ピストンポンプやダイアフラムポンプを用いた場合でも同様の作用を有することができる。すなわち、廃液トレイであるローラードレイントレイ343やパージトレイ114から廃液タンク13Hへ廃液を移送するために、各ポンプを正方向に作用させるのとは逆方向に各ポンプを作用させることにより、廃棄要否判定部411は、満充填状態であるか否かを検出することができる。
【0132】
造形処理部402は、造形処理の実行中におけるパージ処理の開始時などに、廃液タンク13H内の蓄積量が一定量を越えたことが検知されれば、当該造形処理を中断する。表示部122は、廃液タンク13H内の蓄積量が一定量を越えたことが検知されれば、廃液タンク13H内の蓄積量が一定量を越えたことを示すメッセージを表示する。
【0133】
図13及び図14のステップS101〜S117,S121,S122,S131,S132,S141及びS142は、図12の3次元造形装置10における造形処理時の動作の一例を示したフローチャートである。まず、造形処理部402は、ローラードレイントレイ343内の廃液を廃液タンク13Hへ流入させるために、廃液ポンプ60bを正回転駆動する(ステップS101)。次に、比較部404は、一定時間ごとに圧力センサ92,93の検出値を取得し、詰まり判定閾値TMと比較する(ステップS102,S103)。
【0134】
このとき、詰まり検出部405は、圧力センサ92の検出値が判定閾値TMbよりも低いか、或いは、圧力センサ93の検出値が判定閾値TMcよりも高ければ、廃液管55b,55cの詰まりが生じたと判断し、詰まりエラーを出力し、造形処理が中断される(ステップS121,S122)。一方、圧力センサ92,93の検出値が正常であれば、ステップS102,S103の処理手順が繰り返される。
【0135】
次に、造形処理部402は、パージ処理を実行するタイミングが到来すれば、廃液ポンプ60bを停止し(ステップS104,S105)、廃液タンク13Hが満充填状態であるか否かを検知するために、廃液ポンプ60aを逆回転駆動する(ステップS106)。比較部407は、逆回転駆動の開始から一定時間が経過すれば、圧力センサ93の検出値を取得し、液面判定閾値EMと比較する(ステップS107〜S109)。
【0136】
このとき、液面検出部408は、圧力センサ93の検出値が液面判定閾値EMよりも低ければ、廃液タンク13H内の液面が廃液管54の下端に到達したと判断し、フルタンクエラーを出力し、造形処理が中断される(ステップS131,S132)。
【0137】
一方、造形処理部402は、圧力センサ93の検出値が正常であれば、廃液ポンプ60aを停止する(ステップS110)。次に、造形処理部402は、パージ処理を開始し、パージトレイ114内の廃液を廃液タンク13Hへ流入させるために、廃液ポンプ60aを正回転駆動する(ステップS111,S112)。
【0138】
次に、比較部404は、一定時間ごとに圧力センサ91,93の検出値を取得し、詰まり判定閾値TMと比較する(ステップS113,S114)。このとき、詰まり検出部405は、圧力センサ91の検出値が判定閾値TMaよりも低いか、或いは、圧力センサ93の検出値が判定閾値TMcよりも高ければ、廃液管55a,55cの詰まりが生じたと判断し、詰まりエラーを出力し、造形処理が中断される(ステップS141,S142)。一方、圧力センサ91,93の検出値が正常であれば、ステップS113,S114の処理手順が繰り返される。
【0139】
次に、造形処理部402は、パージ処理を終了し、廃液ポンプ60aを停止する(ステップS115,S116)。ステップS101以降の処理手順は、造形処理が終了するまで繰り返される(ステップS117)。
【0140】
本実施の形態によれば、廃液タンク13H内の液面が廃液管54の下端に到達したか否かによって、廃液タンク13H内の蓄積量が一定量を越えたか否かを確実に検知することができる。
【0141】
また、廃液管の詰まり検出用の圧力センサ93を用いて、廃液タンク13H内の液面が廃液管54の下端に到達したことが検出される。このため、廃液タンク13H内における廃液の蓄積量が一定量を越えたことを検知するためのセンサを別個に用意する場合に比べて、製造コストの増大を抑制することができる。さらに、圧力センサ93又は重量センサ80のいずれかに不具合が生じた場合であっても、廃液タンク13H内の蓄積量が一定量を越えたことを正しく検知することができ、検出精度を向上させることができる。
【0142】
なお、本実施の形態では、パージトレイ114内の廃液を回収するための廃液ポンプ60aを逆回転させた際の圧力の検出値に基づいて、廃液タンク13H内の液面が廃液管54の下端に到達したことを検出する場合の例について説明したが、本発明はこれに限定されるものではない。例えば、ローラードレイントレイ343内の廃液を回収するための廃液ポンプ60bを液面検出に用いても良い。
【0143】
また、本実施の形態では、廃棄要否判定部411が液面検出部408の検出結果と比較部410の比較結果とに基づいて、廃液タンク13Hが満充填状態であるか否かを判定する場合の例について説明したが、本発明はこれに限定されるものではない。例えば、廃液を蓄積するための予備タンクを備え、液面検出部408の検出結果と重量センサ80の出力とに基づいて、廃液の流入先を廃液タンク13Hから予備タンクへ切り替えるような構成であっても良い。
【0144】
また、本実施の形態では、可搬プレート41とプレート取付台42とからz移動ユニット40が構成される場合の例について説明したが、本発明は、可搬プレート41及びプレート取付台42からなるユニットが可動式のものに限定するものではなく、固定式のものであっても良い。すなわち、ヘッドユニット111を鉛直方向へ移動させることにより、可搬プレート41上に造形材層を積層形成するようなものも本発明には含まれる。
【符号の説明】
【0145】
100 造形システム
10 3次元造形装置
11 上部扉
110 作業空間
111 ヘッドユニット
112 造形ステージ
113a x走査用係合溝
113b y走査用ガイド機構
114 パージトレイ
116 天板
12 操作表示部
121 操作部
122 表示部
13 前面扉
130 カートリッジ収容部
13M モデル材カートリッジ
13S サポート材カートリッジ
13H 廃液タンク
20 造形依頼者端末
31 サポート材用ノズルユニット
311 サポート材用のリザーブタンク
312 サポート材用の造形材ノズル
32 モデル材用ノズルユニット
321 モデル材用のリザーブタンク
322 モデル材用の造形材ノズル
33 y走査用ホルダユニット
34 ローラーユニット
341 膜厚調整用ローラー
342 ブレード
343 ローラードレイントレイ
344 吸引パイプ
35 ランプユニット
351 UVランプ
40 z移動ユニット
41 可搬プレート
42 プレート取付台
43 z駆動装置
51 吸込口
52〜54,55a〜55c 廃液管
56 分岐部
60,60a,60b 廃液ポンプ
80 重量センサ
91〜93 圧力センサ
400 ネットワーク通信部
401 造形ジョブ記憶部
402 造形処理部
403 詰まり判定閾値記憶部
404,407,410 比較部
405 詰まり検出部
406 液面判定閾値記憶部
408 液面検出部
409 蓄積量判定閾値記憶部
411 廃棄要否判定部
1 LAN
2 吐出口
3 液滴
4 造形材層
M モデル材
S サポート材
SS 下地層
【特許請求の範囲】
【請求項1】
造形ステージ上に造形材ノズルから造形材を吐出させ、かつ、吐出された造形材を硬化させて所定の厚みを有する造形材の層を形成する動作を繰り返すことにより、当該造形材の層を積層して造形を行う3次元造形装置において、
上記造形材を吐出するための造形材吐出手段と、
上記造形材を硬化させるための硬化手段と、
上記造形材が流動可能な状態でこれを上面から回転しながら押圧して、当該造形材の余剰分を掻き取るためのローラー部と、
上記造形材吐出手段、上記硬化手段及び上記ローラー部を支承するヘッドユニットと、
上記ヘッドユニットを少なくとも主走査方向に往復走査させるためのヘッド駆動手段と、
上記ヘッドユニットと上記造形ステージとの高さ方向の相対位置を移動させるための垂直駆動手段と、
上記ヘッド駆動手段及び上記垂直駆動手段を制御するとともに、上記造形材吐出手段による上記造形材の吐出及び上記硬化手段による硬化を制御する造形制御手段と、
上記ヘッドユニットの可動エリア内であって、かつ、上記造形ステージに隣接して設けられ、上記造形材吐出手段の目詰まりを防止するために上記造形材を強制的に吐出するパージ処理の際に、当該吐出された造形材を一時的に収容するパージトレイと、
上記パージトレイに一時的に収容された廃液を蓄積するための廃液タンクと、
上記廃液タンク内に蓄積された廃液の蓄積量を検出するための蓄積量検出センサと、
一端が上記廃液タンク内に配設され、他端が上記パージトレイに接続された廃液管と、
上記廃液管を介して、上記パージトレイ内の廃液を上記廃液タンクへ流入させる廃液ポンプと、
上記廃液ポンプよりも上記廃液タンク側において、上記廃液管内の圧力を測定する圧力センサと、
上記廃液ポンプを上記パージトレイ内の廃液を上記廃液タンクへ流入させる方向とは逆方向に動作させた際における上記圧力センサの出力に基づいて、上記廃液タンク内の液面が上記廃液管の一端に到達したことを検出する液面検出手段と、
上記液面検出手段の検出結果又は上記蓄積量検出センサの検出結果に基づいて、上記廃液タンク内における廃液の蓄積量が一定量を越えたか否かを判定する蓄積量判定手段とを備えたことを特徴とする3次元造形装置。
【請求項2】
上記廃液ポンプの正回転時に、上記圧力センサによって測定された上記廃液管内の圧力を正の第1判定閾値と比較する第1比較手段と、
第1比較手段の比較結果に基づいて、上記廃液管の詰まりを検出する詰まり検出手段と、
上記廃液ポンプの逆回転時に、上記圧力センサによって測定された上記廃液管内の圧力を負の第2判定閾値と比較する第2比較手段とを備え、
上記液面検出手段は、第2比較手段の比較結果に基づいて、上記廃液タンク内の液面が上記廃液管の一端に到達したことを検出することを特徴とする請求項1に記載の3次元造形装置。
【請求項3】
上記ローラー部で掻き取られた造形材からなる廃液を一時的に収容するローラードレイントレイを備え、
上記廃液管は、上記廃液ポンプと上記圧力センサとの間に分岐部を備え、上記分岐部と上記パージトレイとを結ぶ第1廃液管と、上記分岐部と上記ローラードレイントレイとを結ぶ第2廃液管と、上記分岐部と上記廃液タンクとを結ぶ第3廃液管とからなり、
上記廃液ポンプは、上記第1廃液管を介して、上記パージトレイ内の廃液を上記廃液タンクへ流入させる第1廃液ポンプと、上記第2廃液管を介して、上記ローラードレイントレイ内の廃液を上記廃液タンクへ流入させる第2廃液ポンプとからなることを特徴とする請求項2に記載の3次元造形装置。
【請求項4】
上記第1廃液ポンプよりも上記パージトレイ側において、上記第1廃液管内の圧力を測定する第1圧力センサと、
上記第2廃液ポンプよりも上記ローラードレイントレイ側において、上記第2廃液管内の圧力を測定する第2圧力センサとを備え、
上記詰まり検出手段は、上記第1圧力センサの測定値に基づいて上記第1廃液ポンプ及び上記パージトレイ間の詰まりを検出し、上記第2圧力センサの測定値に基づいて上記第2廃液ポンプ及び上記ローラードレイントレイ間の詰まりを検出することを特徴とする請求項3に記載の3次元造形装置。
【請求項5】
上記廃液ポンプは、逆回転時の回転速度が正回転時よりも速いことを特徴とする請求項1〜4のいずれかに記載の3次元造形装置。
【請求項6】
上記蓄積量検出センサは、上記廃液タンクの重さを測定する重量センサであり、
上記蓄積量判定手段は、上記液面検出手段の検出結果及び上記重量センサの出力に基づいて、上記廃液タンク内における廃液の蓄積量が一定量を越えたか否かを判定することを特徴とする請求項1〜5のいずれかに記載の3次元造形装置。
【請求項7】
造形ステージ上に造形材ノズルから造形材を吐出させ、かつ、吐出された造形材を硬化させて所定の厚みを有する造形材の層を形成する動作を繰り返すことにより、当該造形材の層を積層して造形を行う3次元造形装置において、
上記造形材を吐出するための造形材吐出手段と、
上記造形材を硬化させるための硬化手段と、
上記造形材が流動可能な状態でこれを上面から回転しながら押圧して、当該造形材の余剰分を掻き取るためのローラー部と、
上記造形材吐出手段、上記硬化手段及び上記ローラー部を支承するヘッドユニットと、
上記ヘッドユニットを少なくとも主走査方向に往復走査させるためのヘッド駆動手段と、
上記ヘッドユニットと上記造形ステージとの高さ方向の相対位置を移動させるための垂直駆動手段と、
上記ヘッド駆動手段及び上記垂直駆動手段を制御するとともに、上記造形材吐出手段による上記造形材の吐出及び上記硬化手段による硬化を制御する造形制御手段と、
上記ローラー部で掻き取られた造形材からなる廃液を一時的に収容するローラードレイントレイと、
上記ローラードレイントレイに一時的に収容された廃液を蓄積するための廃液タンクと、
上記廃液タンク内に蓄積された廃液の蓄積量を検出するための蓄積量検出センサと、
一端が上記廃液タンク内に配設され、他端が上記ローラードレイントレイに接続された廃液管と、
上記廃液管を介して、上記ローラードレイントレイ内の廃液を上記廃液タンクへ流入させる廃液ポンプと、
上記廃液ポンプよりも上記廃液タンク側において、上記廃液管内の圧力を測定する圧力センサと、
上記廃液ポンプを上記ローラードレイントレイ内の廃液を上記廃液タンクへ流入させる方向とは逆方向に動作させた際における上記圧力センサの出力に基づいて、上記廃液タンク内の液面が上記廃液管の一端に到達したことを検出する液面検出手段と、
上記液面検出手段の検出結果又は上記蓄積量検出センサの検出結果に基づいて、上記廃液タンク内における廃液の蓄積量が一定量を越えたか否かを判定する蓄積量判定手段とを備えたことを特徴とする3次元造形装置。
【請求項1】
造形ステージ上に造形材ノズルから造形材を吐出させ、かつ、吐出された造形材を硬化させて所定の厚みを有する造形材の層を形成する動作を繰り返すことにより、当該造形材の層を積層して造形を行う3次元造形装置において、
上記造形材を吐出するための造形材吐出手段と、
上記造形材を硬化させるための硬化手段と、
上記造形材が流動可能な状態でこれを上面から回転しながら押圧して、当該造形材の余剰分を掻き取るためのローラー部と、
上記造形材吐出手段、上記硬化手段及び上記ローラー部を支承するヘッドユニットと、
上記ヘッドユニットを少なくとも主走査方向に往復走査させるためのヘッド駆動手段と、
上記ヘッドユニットと上記造形ステージとの高さ方向の相対位置を移動させるための垂直駆動手段と、
上記ヘッド駆動手段及び上記垂直駆動手段を制御するとともに、上記造形材吐出手段による上記造形材の吐出及び上記硬化手段による硬化を制御する造形制御手段と、
上記ヘッドユニットの可動エリア内であって、かつ、上記造形ステージに隣接して設けられ、上記造形材吐出手段の目詰まりを防止するために上記造形材を強制的に吐出するパージ処理の際に、当該吐出された造形材を一時的に収容するパージトレイと、
上記パージトレイに一時的に収容された廃液を蓄積するための廃液タンクと、
上記廃液タンク内に蓄積された廃液の蓄積量を検出するための蓄積量検出センサと、
一端が上記廃液タンク内に配設され、他端が上記パージトレイに接続された廃液管と、
上記廃液管を介して、上記パージトレイ内の廃液を上記廃液タンクへ流入させる廃液ポンプと、
上記廃液ポンプよりも上記廃液タンク側において、上記廃液管内の圧力を測定する圧力センサと、
上記廃液ポンプを上記パージトレイ内の廃液を上記廃液タンクへ流入させる方向とは逆方向に動作させた際における上記圧力センサの出力に基づいて、上記廃液タンク内の液面が上記廃液管の一端に到達したことを検出する液面検出手段と、
上記液面検出手段の検出結果又は上記蓄積量検出センサの検出結果に基づいて、上記廃液タンク内における廃液の蓄積量が一定量を越えたか否かを判定する蓄積量判定手段とを備えたことを特徴とする3次元造形装置。
【請求項2】
上記廃液ポンプの正回転時に、上記圧力センサによって測定された上記廃液管内の圧力を正の第1判定閾値と比較する第1比較手段と、
第1比較手段の比較結果に基づいて、上記廃液管の詰まりを検出する詰まり検出手段と、
上記廃液ポンプの逆回転時に、上記圧力センサによって測定された上記廃液管内の圧力を負の第2判定閾値と比較する第2比較手段とを備え、
上記液面検出手段は、第2比較手段の比較結果に基づいて、上記廃液タンク内の液面が上記廃液管の一端に到達したことを検出することを特徴とする請求項1に記載の3次元造形装置。
【請求項3】
上記ローラー部で掻き取られた造形材からなる廃液を一時的に収容するローラードレイントレイを備え、
上記廃液管は、上記廃液ポンプと上記圧力センサとの間に分岐部を備え、上記分岐部と上記パージトレイとを結ぶ第1廃液管と、上記分岐部と上記ローラードレイントレイとを結ぶ第2廃液管と、上記分岐部と上記廃液タンクとを結ぶ第3廃液管とからなり、
上記廃液ポンプは、上記第1廃液管を介して、上記パージトレイ内の廃液を上記廃液タンクへ流入させる第1廃液ポンプと、上記第2廃液管を介して、上記ローラードレイントレイ内の廃液を上記廃液タンクへ流入させる第2廃液ポンプとからなることを特徴とする請求項2に記載の3次元造形装置。
【請求項4】
上記第1廃液ポンプよりも上記パージトレイ側において、上記第1廃液管内の圧力を測定する第1圧力センサと、
上記第2廃液ポンプよりも上記ローラードレイントレイ側において、上記第2廃液管内の圧力を測定する第2圧力センサとを備え、
上記詰まり検出手段は、上記第1圧力センサの測定値に基づいて上記第1廃液ポンプ及び上記パージトレイ間の詰まりを検出し、上記第2圧力センサの測定値に基づいて上記第2廃液ポンプ及び上記ローラードレイントレイ間の詰まりを検出することを特徴とする請求項3に記載の3次元造形装置。
【請求項5】
上記廃液ポンプは、逆回転時の回転速度が正回転時よりも速いことを特徴とする請求項1〜4のいずれかに記載の3次元造形装置。
【請求項6】
上記蓄積量検出センサは、上記廃液タンクの重さを測定する重量センサであり、
上記蓄積量判定手段は、上記液面検出手段の検出結果及び上記重量センサの出力に基づいて、上記廃液タンク内における廃液の蓄積量が一定量を越えたか否かを判定することを特徴とする請求項1〜5のいずれかに記載の3次元造形装置。
【請求項7】
造形ステージ上に造形材ノズルから造形材を吐出させ、かつ、吐出された造形材を硬化させて所定の厚みを有する造形材の層を形成する動作を繰り返すことにより、当該造形材の層を積層して造形を行う3次元造形装置において、
上記造形材を吐出するための造形材吐出手段と、
上記造形材を硬化させるための硬化手段と、
上記造形材が流動可能な状態でこれを上面から回転しながら押圧して、当該造形材の余剰分を掻き取るためのローラー部と、
上記造形材吐出手段、上記硬化手段及び上記ローラー部を支承するヘッドユニットと、
上記ヘッドユニットを少なくとも主走査方向に往復走査させるためのヘッド駆動手段と、
上記ヘッドユニットと上記造形ステージとの高さ方向の相対位置を移動させるための垂直駆動手段と、
上記ヘッド駆動手段及び上記垂直駆動手段を制御するとともに、上記造形材吐出手段による上記造形材の吐出及び上記硬化手段による硬化を制御する造形制御手段と、
上記ローラー部で掻き取られた造形材からなる廃液を一時的に収容するローラードレイントレイと、
上記ローラードレイントレイに一時的に収容された廃液を蓄積するための廃液タンクと、
上記廃液タンク内に蓄積された廃液の蓄積量を検出するための蓄積量検出センサと、
一端が上記廃液タンク内に配設され、他端が上記ローラードレイントレイに接続された廃液管と、
上記廃液管を介して、上記ローラードレイントレイ内の廃液を上記廃液タンクへ流入させる廃液ポンプと、
上記廃液ポンプよりも上記廃液タンク側において、上記廃液管内の圧力を測定する圧力センサと、
上記廃液ポンプを上記ローラードレイントレイ内の廃液を上記廃液タンクへ流入させる方向とは逆方向に動作させた際における上記圧力センサの出力に基づいて、上記廃液タンク内の液面が上記廃液管の一端に到達したことを検出する液面検出手段と、
上記液面検出手段の検出結果又は上記蓄積量検出センサの検出結果に基づいて、上記廃液タンク内における廃液の蓄積量が一定量を越えたか否かを判定する蓄積量判定手段とを備えたことを特徴とする3次元造形装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−67019(P2013−67019A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−205107(P2011−205107)
【出願日】平成23年9月20日(2011.9.20)
【出願人】(000129253)株式会社キーエンス (681)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月20日(2011.9.20)
【出願人】(000129253)株式会社キーエンス (681)
【Fターム(参考)】
[ Back to top ]