
3軸センサの誤りを有する測定軸を特定するための方法
【課題】固定基準座標系の中の移動物体に固定されている3軸センサの、誤りを有する測定軸を特定するための方法を提供する。
【解決手段】センサCjによる第1の場の測定値の移動基準座標に対応する推定ベクトルbejを生成するステップは、第1の場および第2の場の方向を与えるセンサCj、Ciの固定基準座標系ベクトルriおよびrjのスカラー積およびベクトル積を取るステップと、移動物体に固定されている移動基準座標系において第2の場の方向を与えるベクトルbmiの測定値を求めるステップとを含んでいる。移動基準座標系においてセンサCiの測定ベクトルbmiに対するセンサCjの推定ベクトルbejの角度は、固定基準座標系のセンサCiのベクトルriに対するセンサCjのベクトルrjの角度と同一である性質を利用する。
【解決手段】センサCjによる第1の場の測定値の移動基準座標に対応する推定ベクトルbejを生成するステップは、第1の場および第2の場の方向を与えるセンサCj、Ciの固定基準座標系ベクトルriおよびrjのスカラー積およびベクトル積を取るステップと、移動物体に固定されている移動基準座標系において第2の場の方向を与えるベクトルbmiの測定値を求めるステップとを含んでいる。移動基準座標系においてセンサCiの測定ベクトルbmiに対するセンサCjの推定ベクトルbejの角度は、固定基準座標系のセンサCiのベクトルriに対するセンサCjのベクトルrjの角度と同一である性質を利用する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、固定された基準座標系の中にある移動物体に固定されている3軸センサにおける誤りを有する測定軸を特定するための方法および装置に関する。本発明の目的はまた、この方法を実施するために必要な情報記録媒体にも関する。
【背景技術】
【0002】
3軸センサは、3次元空間の中で、物理量によって生ずる場(フィールド)の方向、また一般的に、その振幅を測定することができるセンサである。この目的のために、3軸センサは、互いに平行ではない、少なくとも3つの測定軸を備えている。
【0003】
3軸センサの、1つまたは複数の誤りを有する測定軸の特定は、例えば、移動物体の位置判定のための方法において使用される。実際には、誤りを有する測定軸に起因する測定値は、破棄、または重み付けされて、移動物体の位置または方向が判定される。
【0004】
公知の特定方法は、
− 移動物体に対して、自由度なく固定されている移動基準座標系の中の測定点において、物理量によって生ずる第1の場の方向を与えるベクトルbmjを、移動物体に固定された3軸センサCjによって測定するステップと、
− 同じ移動基準座標系の中の測定点において、物理量によって生ずる第2の場の方向を与えるベクトルbmiを、同じ移動物体に固定された3軸センサCiによって測定するステップであって、第1の場および第2の場は、移動物体の動きが限定されている動作空間の中の任意の点において、それぞれ、この点における場の方向を与えるベクトル(rjおよびri)によって表わされ、これら第1の場および第2の場は、固定基準座標系の中で、正規化ベクトルriおよびrjのスカラー積およびベクトル積は、この動作空間の任意の点において既知であるステップと、
− 更に、測定点における、センサCjによる測定値の推定値に対応するベクトルbejを、測定値bmjを使用せずに生成ステップと、
− ベクトルbejとbmjとの間の差を計算し、移動基準座標系における各軸の上のベクトルbejおよびbmjの座標の間の差に対応する残量を有する残留ベクトルを、移動基準座標系の各軸に沿った座標として求めるステップと、
− 誤りを有するセンサCjの1つまたは複数の測定軸を、移動基準座標系の各軸の上で計算された残量の関数として特定するステップとを備えている。
【0005】
「正規化ベクトル」という用語は、本明細書においては、それぞれのベクトルの座標がこのベクトルのノルムによって除算されたベクトルを示している。ベクトルのノルムは、例えば、ユークリッドノルムである。
【0006】
上記した方法は、例えば、非特許文献1で開示されている。
【0007】
非特許文献1の中では、センサCiおよびCjは、それぞれ、3軸加速度計および3軸磁力計である。
【0008】
ベクトルbejを生成するためには、次に示すことが必要である。
− 移動物体の具体的なモデルを、この物体の上に固定されたセンサの、異なる測定値を互いに関係づけている連立方程式の形で求めること。
− 冗長性のある測定値を得ること、すなわち、センサによって同時に測定された測定値の数は、移動物体のモデルを示す連立方程式の中における未知数の数よりも、必ず多いこと。
【0009】
これらの条件が満足された場合には、限定された数の測定値から、他の測定値を推定することができる。そして、推定された測定値は、実際の測定値から差し引かれて、1つまたは複数の誤りを有する測定軸を特定することができる。ある軸に沿った場の測定値の誤差が所定の閾値を超えた場合には、この測定軸は、「誤りがある」と呼ばれることとなる。この軸に沿った測定値は、移動物体とは明らかに異なる擾乱物体によって、擾乱を受けた可能性がある。例えば、この擾乱物体は、測定軸の中の1つに近接する金属物質である可能性がある。特定な測定軸の上にあるセンサ自身の誤りがある場合にも、その測定軸は、誤りがあると考えることができる。
【0010】
公知の方法は、よく機能はするが、以上に述べた理由により、物体のモデルと、冗長な測定が必要である。
【0011】
また従来技術を、非特許文献2および特許文献1から知ることができる。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】フランス国特許第FR2777365A1号明細書
【非特許文献】
【0013】
【非特許文献1】C. Berbra, S. Gentil and S. Lesecq, "Identification of Multiple Faults in an Inertial Measurement Unit(慣性測定ユニットにおける複数の誤りの特定)", 7th Workshop on Advanced Control and Diagnosis (ACD '2009), Zielona Gora, Pl, November 2009
【非特許文献2】Nguyen H V, et al., "Diagnosis of an inertial measurement unit based on set membership estimation(セットメンバシップ推定に基づく慣性測定ユニットの診断)", Control and Automation, 2009, Med ≪09≫, 17th Mediterranean Conference on, IEEE Piscataway, NJ, USA, 24 June 2009, pp. 211-216
【非特許文献3】Michele Basseville, Igor V. Nikiforov, "Detection of Abrupt Changes-Theory and Application(急激な変化の検出−理論と応用)", Premntice-Hall, Inc., ISBN 0-13-126780-9, April 1993, Engelwood Cliffs, NJ, (特に、4.2章および4.2.1章の中の定理参照)
【非特許文献4】S. Lesecq, "Chapitre 2. Traitement du signal pour le diagnostis" dans "Supervision des procedes complexes", (Chapter 2. Signal Processing for diagnostics" in "Supervision of complex methods")(「複合した方法の監視」の中の、第2章、「診断のための信号処理」), Lavoisier, 2007
【非特許文献5】W. H. Steyn, M. J. Jacobs and P. J. Oosthuizen, "A High Performance Star Sensor System for Full Attitude Determination on Microsatellite(マイクロ衛星におけるフルアティチュード判定のための高性能星センサ)", Department of Electronic Engineering, University of Stellenbosch, Stellenbosch 7600, South Africa
【発明の概要】
【発明が解決しようとする課題】
【0014】
本発明は、センサ間の冗長性、また互いに異なる測定値に結合している特定のモデルを必要としない3軸センサにより、誤りを有する測定軸を特定する方法を提供することを目的としている。
【課題を解決するための手段】
【0015】
従って、本発明の目的は、この種の方法であって、ベクトルbejを、
− ベクトルriおよびrjのスカラー積およびベクトル積と、
− ベクトルbmiの測定値とから、ベクトルbmiに対するベクトルbejの方向が、ベクトルriに対するベクトルrjの方向と同一の方向となるように求めることである。
【0016】
移動基準座標系の中では、測定値bmiおよびbmjは、それぞれ、ベクトルriおよびrjに対応している。固定基準座標系の中で、ベクトルriとrjとの間の角度の関係は既知である。従って、測定値bmiおよびbmjが健全であると、すなわち、検出可能ないずれの誤りもなければ、ベクトルbmiとbmjとの間の角度の関係は、ベクトルriとrjとの間の角度の関係と同じである。この性質を利用すれば、センサCiおよびCjの互いに異なる測定値に結合している移動物体の特定のモデルを利用する必要なく、この目的のために、推定値bejを得ることが可能である。従って、この方法は、任意の物体に対して、この物体の幾何形状または性質を事前に知る必要なく、使用することができる。
【0017】
さらに、センサCiおよびCjの測定値の間には、冗長性が存在することはない。最後に、この方法によれば、3軸センサの、誤りを有する測定軸に対して、このセンサの誤りによるものではなくて誤りを有する測定軸を特定することが可能になる。
【0018】
この方法の実施形態は、次に示す特徴の中の1つ以上を備えることができる。
・1つまたは複数の誤りを有する測定軸を特定するステップは、残留ベクトルの各座標をネイマン・ピアソンの仮説検定を適用して、ただ1つの情報ビットに符号化可能なブール値に変換し、これにより兆候ベクトルを求めるステップを備えている。このブールベクトルは、1つの状態の中に誤りが存在し、他の状態の中には、いずれの誤りも存在しないということを示している。
・ベクトルbejの推定値は、次の関係式から生成される。
− ri・rj=bmi・bej
− ‖riΛrj‖=‖bmiΛbej‖
− ‖bej‖=‖rj‖(第1の物理量場において、ノルム‖rj‖が動作空間の任意の点で一定である場合)、または、‖bej/bmi‖=‖rj/ri‖(第1および第2の物理量場において、ベクトルriの振幅とベクトルrjの振幅との比が動作空間の任意の点で一定である場合)。
ここで、
− 記号「・」は、スカラー積を取る操作であり、
− 記号「Λ」は、ベクトル積を取る操作であり、
− ‖x‖は、ベクトルのユークリッドノルムである。
・移動基準座標系の軸は、センサCjの測定軸と一致している。
・本発明の方法は、
− 誤差±ε‖ri‖の範囲内で、関係式‖ri‖=‖bmi‖(εは、0.25以下の定数、および、‖...‖は、ベクトルのノルムを示す)が満足されることを検証するステップと、
− この関係式が検証されない場合には、ベクトルriおよびrjのスカラー積およびベクトル積から、またベクトルbmiの測定値からベクトルbejを生成することを系統的に禁止し、この関係式が検証された場合には、ベクトルbejを生成するステップとを備えている。
・第1の場および第2の場は、2つの異なる物理量によって生ずる場、または、第1の場および第2の場は、同じ物理量によって生ずる同じ場である。
・第1の場および第2の場は、地球の磁場または重力場から選択される。
・センサCjおよびCiによる測定値は、それぞれ、第1の場および第2の場に対する測定値であり、従って、固定基準座標系の中における、正規化ベクトルriおよびrjのスカラー積およびベクトル積は、動作空間の中の各点において同一である。
【0019】
この方法の実施形態は、更に、次に示す利点を有する。
− 残留ベクトルの座標をブール値に変換して、1つまたは複数の誤りを有する測定軸を特定することにより、誤りを有する測定軸の検出の信頼度を向上させることができる。
− 正規化ベクトルriおよびrjが、動作空間の各点において同一であるように、第1の場および第2の場を測定することにより、動作空間の中での移動物体の位置、または運動に対する知識の必要性をなくすことができる。
【0020】
本発明の目的はまた、情報記録媒体を提供することであり、この情報記録媒体は、上記で述べた方法をコンピュータによって実行する際に、実行するための命令を備えることができる。
【0021】
最後に、本発明の目的はまた、固定基準座標系の中で移動物体の上に固定された3軸センサCjの、誤りを有する測定軸を特定するための装置を提供することである。この3軸センサCjは、移動物体に対して自由度なく固定されている移動基準座標系の中の測定点において、物理量によって生ずる第1の場の方向を与えるベクトルbmjを測定する。
この装置は、
−同じ移動物体に固定されている3軸センサCiと、センサCiおよびCjの測定値を捕捉することができる電子処理ユニット(12)とを備えている。この3軸センサCiは、同じ移動基準座標系の中で、同じ測定点において物理量によって生ずる第2の場の方向を与えるベクトルbmiを測定することができる。また、第1の場および第2の場は、移動物体の運動が内部に限定されている動作空間の各点で、ベクトルrjおよびriによって表され、ベクトルrjおよびriは、それぞれ、この点における場の方向を与えている。これら第1の場および第2の場に関しては、固定基準座標系の中で、正規化ベクトルriおよびrjのスカラー積およびベクトル積は、この動作空間の各点において既知である。この処理ユニット(12)は、次に示すようにプログラムされている。
・測定点におけるセンサCjによる測定値の推定値に対応したベクトルbejを、測定値bmjを使用せずに生成する。
・ベクトルbejとbmjとの間の差を算出し、残留ベクトルを求める。この残留ベクトルは、移動基準座標系の各軸に沿った座標に対して、移動基準座標系のこの軸の上の、ベクトルbejおよびbmjの座標の間の差に対応する残量を有する。
・誤りを有するセンサCjの1つまたは複数の測定軸を、移動基準座標系の各軸の上で算出された残量の関数として特定する。
・ベクトルbejを、ベクトルbmiに対するベクトルbejの方向が、ベクトルriに対するベクトルrjの方向と同一になるように、
− ベクトルriおよびrjのスカラー積およびベクトル積と、
− ベクトルbmiの測定値とから形成する。
【0022】
以下の説明により、本発明をより明確に理解しうると思う。なお以下の説明は、図面を参照して、単に非網羅的な例に関して行うものである。
【図面の簡単な説明】
【0023】
【図1】移動物体の方向を判定するためのシステムを示す図である。
【図2】誤りを有する測定軸を特定し、図1に示す移動物体の方向を判定するための方法を示すフローチャートである。
【図3】図2に示す方法によって得られた種々の異なる実験結果を表すグラフである。
【図4】図2に示す方法によって得られた種々の異なる実験結果を表すグラフである。
【図5】図2に示す方法によって得られた種々の異なる実験結果を表すグラフである。
【図6】図2に示す方法によって得られた種々の異なる実験結果を表すグラフである。
【図7】図2に示す方法によって得られた種々の異なる実験結果を表すグラフである。
【図8】図2に示す方法によって得られた種々の異なる実験結果を表すグラフである。
【発明を実施するための形態】
【0024】
各図において、同じ符号は、同じ要素を示している。
【0025】
以下において、当業者に公知の特徴および機能については、詳細に説明しない。
【0026】
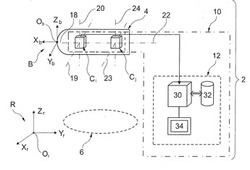
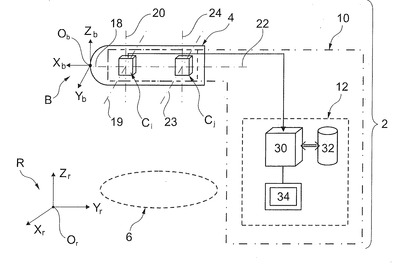
図1は、固定基準座標系Rの中における移動物体4の方向を判定するためのシステム2を示す。また方向は、「アティチュード」とも呼ばれている。
【0027】
固定基準座標系Rは、互いに直交する方向を示す3つの軸Xr、Yr、およびZrで定義される。基準座標系Rは、正規直交系であることが望ましい。これらの軸は、点Orで交わり、点Orは、基準座標系Rの原点を形成している。点Orは、自由度なく大地に結合されている。
【0028】
移動物体4は、固定基準座標系Rの中で移動することができる。この目的のために、移動物体4は、推進するための手段(モータ等)を備えているか、または、移動物体4の外部の推進手段で移動することができるようになっている。例えば、移動物体4は、人体の中に導入されたカテーテルである。
【0029】
移動物体4は、所定の動作空間6の内部で移動する。動作空間6は、典型的に、3次元空間である。図1では、表現を簡単にするために、この動作空間は、長円形の破線で示してある。動作空間6は、自由度なく基準座標系Rに結合されている。
【0030】
移動基準座標系Bは、自由度なく、移動物体4に結合されている。この基準座標系Bは、正規直交系であることが望ましく、互いに直交する方向を示す3つの軸Xb、Yb、およびZbによって定められている。この基準座標系Bの原点は、Obで示されている。
【0031】
システム2は、慣性測定ユニット10を有し、この慣性測定ユニット10は、自由度なく移動物体4に固定されている。また慣性測定ユニット10は、固定基準座標系Rの中で移動物体4の方向を測定する。更に具体的には、慣性測定ユニット10によって、基準座標系Rの各軸Xr、Yr、およびZrに対する、移動物体4の傾きを測定することができる。
【0032】
この目的のために、慣性測定ユニット10は、処理ユニット12に接続された2つのセンサCiおよびCjを備えている。
【0033】
この実施形態においては、センサCiおよびCjは、それぞれ、3軸加速度計、および3軸磁力計である。
【0034】
これらのセンサCiおよびCjは、基準座標系Bの中に固定されている。
【0035】
センサCiは、移動物体4の加速度の、3つの測定軸18〜20の上への、軸と直交する方向からの射影を測定する。3つの測定軸18〜20は、互いに平行ではない。ここでは、これらの軸18〜20は、互いに直交している。表示を簡単にするために、軸18〜20は、それぞれ、基準座標系Bの軸Xb、Yb、Zbと平行になっている。センサCiによって、基準座標系Bの中における移動物体4の加速度の方向および振幅を、直接に測定することが可能なる。本明細書において、「直接に」という用語は、基準座標系Rに対する基準座標系Bの方向を知る必要なく、この測定値を求めることができるという事を示している。センサCiは、特に、地球の重力場の振幅および方向を測定する。本明細書では、「振幅」および「強度」という用語は、同義語として使用する。
【0036】
センサCiの測定値は、3つの座標bxmi、bymi、およびbzmiを有するベクトルbmiの形で示されている。ここで、座標bxmi、bymi、およびbzmiは、それぞれ、軸18〜20に沿って測定した加速度の強度に対応している。
【0037】
センサCjは、互いに平行でない3つの測定軸22〜24の上にある移動物体4の所に存在する静磁場(すなわち、ゼロ周波数の磁場)の、軸に直交する方向からの射影を測定する。ここで、これらの軸22〜24は、それぞれ、軸Xb、Yb、およびZbと平行である。このセンサCjは、基準座標系Bの中における静磁場の方向および振幅を、直接に測定する。従って、センサCjは、地球の磁場の方向および振幅を測定する。
【0038】
センサCjによるこの測定値は、3つの座標bxmj、bymj、およびbzmjを有するベクトルbmjの形を示している。ここで、座標bxmj、bymj、およびbzmjは、それぞれ、軸22〜24に沿って測定値した静磁場の強度に対応している。
【0039】
基準座標系Rの中における、それぞれ、地球の重力場および磁場の測定値もまた、ベクトルriおよびrjの形で示されている。ベクトルbmiおよびbmjの場合と同様に、これらの2つのベクトルriおよびrjは、それぞれ、3つの座標(rxi、ryi、rzi)および(rxj、ryj、rzj)を有する。座標rxi、ryi、およびrziは、それぞれ、軸Xr、Yr、およびZrに沿った地球の重力場の強度の測定値に対応している。座標rxj、ryj、およびrzjは、それぞれ、軸Xr、Yr、およびZrに沿った地球の磁場強度の測定値に対応している。
【0040】
動作空間6は、小さく限定されているので、ベクトルriおよびrjの間における角度の関係は、この動作空間の各点において同一であると考えることができる。これは、特に、動作空間6の中の任意の点において、次に示す2つの関係式が検証されるという事実によって表現することができる。
(1)rni・rnj=α
(2)‖rniΛrnj‖=β
ここで、
− rniおよびrnjは、ベクトルriおよびrjの正規化ベクトルであり、
− 記号「・」は、スカラー積を取る操作であり、
− 記号「Λ」は、ベクトル積を取る操作であり、
− ‖x‖は、ベクトルxのユークリッドノルムであり、
− αおよびβは、考慮している動作空間6の点に対して無関係な定数である。
【0041】
上記の2つの関係式が検証された場合には、場は、基準場であると呼ばれ、ベクトルriおよびrjは、基準ベクトルである。
【0042】
さらに、ここでは、動作空間6は、小さく限定されているので、ベクトルriおよびrjのノルムは、動作空間6の各点において同一であると考えることができる。従って、次に示す関係式もまた検証することができる。
(3)ri・rj=A
(4)‖riΛrj‖=B
ここで、AおよびBは、定数である。
【0043】
これらの仮説と表示式とを使用すると、移動物体4が準静的な状態である場合には、ベクトルbmiおよびbmjは、それぞれ、ベクトルriおよびrjに対応している。しかし、これらは、基準座標系Rではなくて、基準座標系Bの中で表現されている。
【0044】
本明細書において、「準静的な」という用語は、測定値bmiに対する移動物体4自身の加速度の寄与は、地球の重力場の寄与と比較して、無視することができるという事を示している。例えば、移動物体4が、±ε‖bmi‖(εは定数)の範囲内で‖ri‖=‖bmi‖である場合には、移動物体4は、準静的な状態にあると考えることができる。εの値は、考慮する応用によって決まる。例えば、εの値は、0.25以下であり、更には、0.1、または0.05、または0.01以下であることが望ましい。
【0045】
従って、移動物体4が準静的な状態にあり、センサCiおよびCjの全ての測定軸が誤っていないとすれば、ベクトルbmiとbmjとの間の角度の関係は、ベクトルriとrjとの間の角度の関係と同じである。この性質は、処理ユニット12によって利用され、センサCiおよびCjの、1つ以上の誤りを有する測定軸を特定することができる。
【0046】
処理ユニット12は、測定値bmjおよびbmiを処理し、その結果から、固定基準座標系Rの中での移動物体4の方向を導出することができる。処理ユニット12はまた、ベクトルbmjおよびbmiの測定値から、センサCiおよびCjの、1つ以上の誤りを有する測定軸を特定することができる。処理ユニット12は、移動物体4に固定されていてもよいし、固定されていなくてもよい。ここでは、処理ユニット12が、自由度なく移動物体4に固定されているという特定の場合について説明する。しかしながら、簡単にするために、図1では、処理ユニット12は、移動物体4の外部に描かれている。
【0047】
例えば、この処理ユニット12は、プログラム可能なコンピュータ30によって構成されている。コンピュータ30は、情報記録媒体の上に記録された命令を実行することができる。この目的のために、コンピュータ30は、メモリ32に接続され、メモリ32は、図2に示す方法を実行するために必要なデータおよび命令を含んでいる。
【0048】
更に、ここでは、処理ユニットはまた、コンピュータ30に接続されたマンマシンインタフェース34(スクリーン等)を備え、センサCiおよびCjの、1つまたは複数の誤りを有する測定軸を、人に対して通知する。
【0049】
センサCiおよびCjの中の1つと処理ユニット12とを組み合わせることにより、これらのセンサの中で、他方のセンサの、誤りを有する測定軸を特定する装置を構成することができる。
【0050】
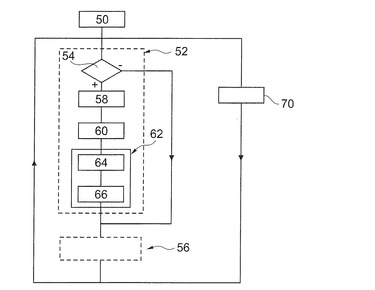
次に、図2に示す方法を参照して、システム2の動作について説明する。
【0051】
この方法は、較正ステップ50から開始される。このステップ50の間では、移動物体4はまだ、基準座標系Bに対して既知の方向にある固定基準座標系Rの中に保持されている。その後、ベクトルriおよびrjは、センサCiおよびCjによって測定され、それらの座標は、基準座標系Rの中で表される。この較正ステップの間は、これらセンサのいずれの測定軸も、誤りではないと仮定されている。
【0052】
その後、段階52では、センサCjの、誤りを有する測定軸を特定する。
【0053】
この段階52は、ステップ54で始まる。ステップ54では、ベクトルbmiおよびbmjを測定し、それにより、センサCiが使用可能であることを確認する。このステップの目的は、センサCjの測定軸の中の1つにおける誤りを特定するために、センサCiが使用可能であるということを検証するだけである。このセンサCiは、誤っていない場合、または準静的状態でない場合には、使用可能であると考えられる。従って、ここでは、この段階52においては、センサCiの、1つまたは複数の誤りを有する測定軸を特定することは行わない。
【0054】
例えば、この実施形態においては、±ε‖ri‖(εは、考えている用途に従って、事前に決められた定数)の範囲内で、次に示す関係式(5)が検証された場合には、センサCiは使用可能であると考えられる。例えば、εの値は、0.25以下であり、また、0.1、または0.05、または0.01以下であることが望ましい。
(5)‖ri‖=‖bmi‖
ここで、‖...‖は、ベクトルのノルムを示している。
【0055】
センサCiが使用可能ではないと考えられる場合には、この方法は、直接に段階56に進み、センサCiの、誤りを有する測定軸を特定する。
【0056】
センサCiが使用可能であると考えられる場合には、ステップ58において、コンピュータ30は、ベクトルbejを生成する。ベクトルbejは、センサCjによる測定値の推定値に対応している。この測定値は、全ての測定軸の上で、誤りが存在しない場合に得られると考えられる。この推定値は、測定値bmj、または移動物体4のモデル、または基準座標系Rの中での移動物体4の位置、または方向を使用せずに生成することができる。この目的のために、本発明は、センサCjの測定軸の上に誤りが存在しない場合には、ベクトルbejとbmiとの間の角度の関係は、ベクトルrjとriとの間の角度の関係と同一であるという性質を使用する。さらに、ここでは、ベクトルbejおよびbmiのノルムは、それぞれ、ベクトルrjおよびriのノルムと同一でなければならない。角度の関係とノルムとが保持されることにより、次に示す連立方程式を得ることができる。
(6)rj・ri=bej・bmi
(7)‖rjΛri‖=‖bejΛbmi‖
(8)‖rj‖=‖bej‖
【0057】
これらの方程式を解くと、ベクトルbejの座標が求められる。例えば、ベクトルbejの座標を求めるために、次に示す量を最小にするベクトルbejの座標を、最小2乗法によって求める。
(9)rj・ri−bej・bmi
(10)‖rjΛri‖−‖bejΛbmi‖
(11)‖rj‖−‖bej‖
【0058】
ベクトルbejが生成されると、ステップ60において、コンピュータ30は、残留ベクトルVrjを算出する。このベクトルVrjは、次に示す関係式によって定義される。
(12)Vrj=bej−bmj
【0059】
従って、ベクトルVrjの各座標は、残量であり、この残量は、基準座標系Bの同じ軸の上のベクトルbejおよびbmjの座標の間の差の関数である。
【0060】
センサCjの測定軸の上に誤りがない場合には、ベクトルVrjの座標は、ゼロ±誤差余裕(特に、ベクトルbmjおよびbmiの測定値に存在する雑音に関係する余裕)と等しくなるべきである。
【0061】
ステップ62において、コンピュータ30は、残留ベクトルVrjから、センサCjの、1つまたは複数の誤りを有する測定軸を特定する。
【0062】
例えば、ステップ64において、コンピュータ30は、ベクトルVrjを兆候ベクトルVsjに変換する。この目的のために、ベクトルVrjの各座標は、仮説検定を適用することにより、ブール値に変換される。ここでは、仮説検定は、ネイマン・ピアソン検定である。このネイマン・ピアソン検定は、例えば、非特許文献3、4に記述されている。
【0063】
例えば、検定の種々のパラメータは、次に示すように選択される。
− 仮説H0:誤りがない場合の平均値は、0に固定される。
− 仮説H1:誤りがある場合の平均値は、0.1以上である。
− 誤り警報の確率は、5%に等しいとする。
【0064】
従って、ステップ66では、コンピュータ30は、兆候ベクトルVsjを誤りシグナチャテーブルと比較する。この誤りシグナチャテーブルは、例えば、次に示す表である。

【0065】
fmx、fmy、およびfmzに対する列は、それぞれ、測定軸22〜24の上の誤りに対応している。Sxj、Syj、およびSzjに対する行は、軸Xb、Yb、およびZbの上におけるベクトルVsjの座標に対応している。
【0066】
この表の中では、fmx、fmy、およびfmzに対する列の中の符号「1」は、対応する測定軸の上には誤りが存在するということを意味している。一方、符号「0」は、対応する測定軸の上には誤りが存在しないということを意味している。
【0067】
従って、兆候(1,0,0)は、このシグナチャテーブルから、測定軸22だけが誤りを有していることを意味すると解釈される。
【0068】
別の例として、兆候(1,1,0)は、センサCjの測定軸22および23だけが誤りを有するということを意味している。
【0069】
段階52の中でステップ62の終了した後に、コンピュータは、段階56を実行し、センサCiの、誤りを有する測定軸を特定する。この段階56は、例えば、段階52と同様の様式で実行される。例えば、段階56は、上記で記述した段階52と同様の様式で実行される。しかし、インデクスiをインデクスjに置き換え、またインデクスjをインデクスiに置き換える。段階56では、シグナチャテーブルは、兆候ベクトルVsiから求められた軸22〜24の上の誤りを示している。
【0070】
ステップ54において、2つのセンサCiおよびCjがどちらも「使用不可能」と判定された場合には、1つまたは複数の誤りを有する測定軸を正確に特定することは不可能になるということにも、留意されたい。この場合には、コンピュータ30は、誤りを有する測定軸を特定せずに、センサCiおよびCjが誤っていることを示すだけになる。
【0071】
段階52および段階56は、正規の間隔で反復される。また同時に、誤りを有する測定軸に関して得られた情報は、ステップ70において、コンピュータ30が移動物体4の方向を判定する際に考慮に入れられる。例えば、1つまたは複数の誤りを有する測定軸を特定したことに応答して、1つまたは複数の誤りを有する測定軸の上での測定値を使用せずに、移動物体4の方向が判定される。誤りを有する軸の上における測定値を使用することもまた可能である。しかし、この場合には、これらの測定値に対して、重み係数を与える。この重み係数は、移動物体4の方向を判定する際に、測定値に対してより低い重みを与える。
【0072】
1つ以上の誤りを有する測定軸を特定したことに応答して、コンピュータ30はまた、これら誤りを有する軸が存在していることを、マンマシンインタフェース34を通して、システム2のユーザに通知する。
【0073】
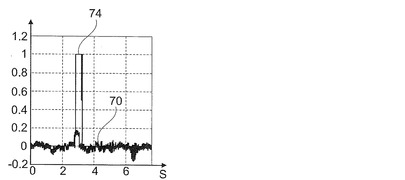
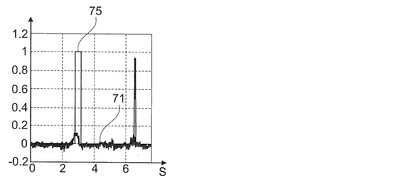
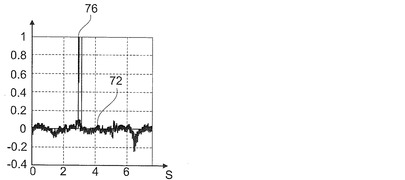
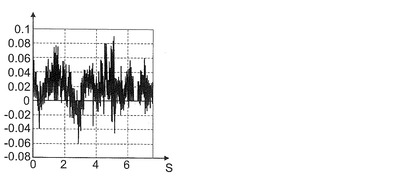
図3〜図5においては、曲線70〜72は、それぞれ、残留ベクトルVriの各座標の時間に対する変化を示している。これらと同じグラフの上で、曲線74〜76は、兆候ベクトルVsiの座標の時間に対する変化を示している。これらのグラフのx軸は、秒で目盛られている。
【0074】
これらの曲線は、1秒から4秒の間に、センサCiの3つの測定軸の上で、誤りが同時に現れた特定の場合に得られたものである。また6秒以降に、測定軸23の上に誤りが現れている(図4参照)。
【0075】
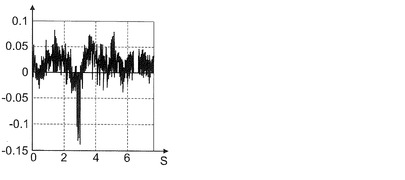
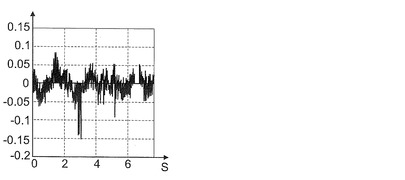
図6〜図8は、それぞれ、軸18〜20に沿う残留ベクトルVrjの座標の時間に対する変化を示す。これらは、図3〜図5と同じ時間間隔の間を示している。
【0076】
これらのグラフは、ディジタルシミュレーションによって得られたものである。これらの図から、図2に示す方法によって、単一の誤りを有する測定軸ばかりでなく、複数の誤りを有する測定軸を、同時に検出および特定することができるということが分かる。
【0077】
多くの他の実施形態も可能である。例えば、ベクトルbmi、bmj、ri、およびrjの間の角度の関係だけを使用して、これらベクトルのノルムの間の関係は使用しない実施形態も可能である。この目的のために、関係式(6)〜(8)においては、非正規化ベクトル、それぞれbmj、bmi、rj、およびriの代わりに、これらの正規化ベクトルbnmj、bnmi、rnjおよびrniを使用する。この場合には、関係式(8)を、‖bej‖=1とすることができる。この実施形態においては、センサCiおよびCjは、物理量によって生ずる場の振幅を測定する必要はなく、場の方向だけを測定すればよい。更に、ベクトルriおよび/またはrjのノルムは、動作空間の各点において一定である必要はない。
【0078】
また、動作空間の任意の点において、ベクトルriおよびrjの振幅の比が一定である場合には、関係式(8)は、‖bej‖/‖bmi‖=‖rj‖/‖ri‖と置き換えることができる。
【0079】
別の実施形態においては、ベクトルriおよびrjのスカラー積およびベクトル積は、動作空間の各点において一定である必要はない。事実、これらの積の値は、動作空間の各点において既知であることで十分である。この場合には、例えば、事前記録された表によって、それぞれ、ベクトルriおよびrjのスカラー積、およびベクトル積α(x,y,z)、およびβ(x,y,z)の値を、動作空間の各点の座標x、y、zに関係づけることができる。従って、センサCjの、誤りを有する軸を特定する際に、式(9)、(10)、および(11)の代わりに、次に示す式を使用して、ベクトルbejを推定することができる。
α(x,y,z)−bej・bmi
β(x,y,z)−‖bejΛbmi‖
‖rj‖−‖bej‖
【0080】
値α(x,y,z)およびβ(x,y,z)は、移動物体の位置に関する情報と、事前記録された表とにより求めることができる。移動物体の位置を知るには、種々の方法がある。例えば、この位置は、他のセンサによって測定することができる。また、移動物体を、動作空間の既知の点に置くようにし、移動物体が空間のその既知の点に位置している時にだけ、本方法を実行し、誤りを有する軸を特定することができる。この変形では、正規化ベクトルを使用することが望ましい。
【0081】
基準の場としては、地球の磁場および地球の重力場以外の場も存在する。例えば、星センサによって、星が位置する方向を測定することができる。測定された方向を固定して、固定基準座標系の各点において同じとすることができる。例えば、この場合には、固定基準座標系は、地球を中心とした基準座標系である。この種の星センサに関しては、非特許文献5において詳細に記述されている。
【0082】
基準場はまた、例えば、動作空間の中に置いた永久磁石、または電気コイルによって、人工的に生成することもできる。
【0083】
全ての基準場は、同じ値であるとすることもでき、従って、ベクトルriおよびrjも同じ値にすることができる。例えば、簡単化した実施形態では、ただ1つの基準場を使用することができる。この場合には、センサCiおよびCjは、同じ場を測定する。これら2つの同一のセンサの測定軸は、必ずしも互いに平行である必要はない。従って、センサCiおよびCjは、どちらも加速度計であってよい。
【0084】
センサCiおよびCjは、どちらもが、移動基準座標系Bの中に固定されている必要はない。実際、2つのセンサの中の1つは、移動基準座標系Bの中で、他方に対して移動していてもよい。この場合には、瞬時瞬時に、移動基準座標系の中における移動センサの方向は、既知であって、その測定値が移動基準座標系の中で表現されるベクトルに変換できる必要がある。
【0085】
誤りを有する測定軸を、残留ベクトルから特定するための、他の方法も可能である。例えば、1つの変形として、残留ベクトルの座標の中の1つが所定の閾値を超えた場合には、この座標に対応する測定軸は、誤りを有すると考えることができる。
【0086】
1つの変形として、移動基準座標系の軸は、測定軸と一致する必要はない。この実施形態は、基準座標系の簡単な変換によって、容易に、ここに記述されている実施形態の場合に関連づけることができる。
【0087】
残留ベクトルを計算するための他の方法も可能である。
【0088】
残留ベクトルとシグナチャテーブルとの比較は、他の様式で行うこともできる。例えば、シグナチャテーブルは、各測定軸の上での残留ベクトルの各座標に対して、閾値Siを規定することもできる。残留ベクトルがこの閾値を超えた測定軸は、誤りを有すると考えることができる。
【0089】
3軸センサは、4つ以上の測定軸を有することができる。この場合には、ベクトルは、3つの座標を有するのではなく、測定軸と同じ数の座標を有することができる。
【0090】
上記で述べた実施形態は、移動物体が固定基準座標系の中を移動する特定の場合について説明している。しかしながら、ここで説明する方法は、2つの基準座標系の中の1つが、他方に対して移動している全ての場合に対して適用することができる。
【0091】
同様に、センサCiおよびCjの測定軸は、互いに平行である必要はない。この場合も、基準座標系の簡単な変換によって、互いに平行である状況に変換することが可能である。
【0092】
2つの3軸センサを使用する特定の場合について説明した事柄は、N個の3軸センサの場合に対しても適用することができる。ここで、Nは、2以上の整数である。この場合には、各3軸センサは、物理量によって生ずる自分自身の基準場を測定することができなければならず、それにより、少なくともN個の基準ベクトル(すなわち、各センサに対して1つの基準ベクトル)が得られなければならない。このベクトルbejは、上記で述べた場合と同じ角度の関係から生成される。しかし、この場合には、「使用可能」と考えられるセンサだけを含んでいる、K個(Kは2以上の整数)からなるセンサCiのグループにおける、それぞれのセンサに対して求められることが望ましい。
【0093】
誤りを有する測定軸を特定するための本発明の方法は、人体の運動機能の回復、または衛星のオリエンテーション等の、多くの技術分野に適用することができる。
【符号の説明】
【0094】
2 システム
4 移動物体
6 動作空間
10 慣性測定ユニット
12 処理ユニット
18、19、20、22、23、24 測定軸
30 コンピュータ
32 メモリ
34 マンマシンインタフェース
50 較正ステップ
52 センサCjの誤りを有する測定軸を特定する段階
54 bmiとbmjとを測定するステップ
56 センサCiの誤りを有する測定軸を特定する段階
58 bejを生成するステップ
60 残留ベクトルを求めるステップ
62 センサCjの誤りを有する測定軸を特定するステップ
64 VrjをVsjに変換するステップ
66 Vsjをシグナチャテーブルと比較するステップ
70 反復するステップ
70、71、72 残留ベクトルVriの変化
74、75、76 兆候ベクトルVsiの変化
B 移動基準座標系
Ci、Cj センサ
Ob 移動基準座標系Bの原点
Or 固定基準座標系Rの原点
R 固定基準座標系
Xb、Yb、Zb 移動基準座標系B座標軸
Xr、Yr、Zr 固定基準座標系Rの座標軸
【技術分野】
【0001】
本発明は、固定された基準座標系の中にある移動物体に固定されている3軸センサにおける誤りを有する測定軸を特定するための方法および装置に関する。本発明の目的はまた、この方法を実施するために必要な情報記録媒体にも関する。
【背景技術】
【0002】
3軸センサは、3次元空間の中で、物理量によって生ずる場(フィールド)の方向、また一般的に、その振幅を測定することができるセンサである。この目的のために、3軸センサは、互いに平行ではない、少なくとも3つの測定軸を備えている。
【0003】
3軸センサの、1つまたは複数の誤りを有する測定軸の特定は、例えば、移動物体の位置判定のための方法において使用される。実際には、誤りを有する測定軸に起因する測定値は、破棄、または重み付けされて、移動物体の位置または方向が判定される。
【0004】
公知の特定方法は、
− 移動物体に対して、自由度なく固定されている移動基準座標系の中の測定点において、物理量によって生ずる第1の場の方向を与えるベクトルbmjを、移動物体に固定された3軸センサCjによって測定するステップと、
− 同じ移動基準座標系の中の測定点において、物理量によって生ずる第2の場の方向を与えるベクトルbmiを、同じ移動物体に固定された3軸センサCiによって測定するステップであって、第1の場および第2の場は、移動物体の動きが限定されている動作空間の中の任意の点において、それぞれ、この点における場の方向を与えるベクトル(rjおよびri)によって表わされ、これら第1の場および第2の場は、固定基準座標系の中で、正規化ベクトルriおよびrjのスカラー積およびベクトル積は、この動作空間の任意の点において既知であるステップと、
− 更に、測定点における、センサCjによる測定値の推定値に対応するベクトルbejを、測定値bmjを使用せずに生成ステップと、
− ベクトルbejとbmjとの間の差を計算し、移動基準座標系における各軸の上のベクトルbejおよびbmjの座標の間の差に対応する残量を有する残留ベクトルを、移動基準座標系の各軸に沿った座標として求めるステップと、
− 誤りを有するセンサCjの1つまたは複数の測定軸を、移動基準座標系の各軸の上で計算された残量の関数として特定するステップとを備えている。
【0005】
「正規化ベクトル」という用語は、本明細書においては、それぞれのベクトルの座標がこのベクトルのノルムによって除算されたベクトルを示している。ベクトルのノルムは、例えば、ユークリッドノルムである。
【0006】
上記した方法は、例えば、非特許文献1で開示されている。
【0007】
非特許文献1の中では、センサCiおよびCjは、それぞれ、3軸加速度計および3軸磁力計である。
【0008】
ベクトルbejを生成するためには、次に示すことが必要である。
− 移動物体の具体的なモデルを、この物体の上に固定されたセンサの、異なる測定値を互いに関係づけている連立方程式の形で求めること。
− 冗長性のある測定値を得ること、すなわち、センサによって同時に測定された測定値の数は、移動物体のモデルを示す連立方程式の中における未知数の数よりも、必ず多いこと。
【0009】
これらの条件が満足された場合には、限定された数の測定値から、他の測定値を推定することができる。そして、推定された測定値は、実際の測定値から差し引かれて、1つまたは複数の誤りを有する測定軸を特定することができる。ある軸に沿った場の測定値の誤差が所定の閾値を超えた場合には、この測定軸は、「誤りがある」と呼ばれることとなる。この軸に沿った測定値は、移動物体とは明らかに異なる擾乱物体によって、擾乱を受けた可能性がある。例えば、この擾乱物体は、測定軸の中の1つに近接する金属物質である可能性がある。特定な測定軸の上にあるセンサ自身の誤りがある場合にも、その測定軸は、誤りがあると考えることができる。
【0010】
公知の方法は、よく機能はするが、以上に述べた理由により、物体のモデルと、冗長な測定が必要である。
【0011】
また従来技術を、非特許文献2および特許文献1から知ることができる。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】フランス国特許第FR2777365A1号明細書
【非特許文献】
【0013】
【非特許文献1】C. Berbra, S. Gentil and S. Lesecq, "Identification of Multiple Faults in an Inertial Measurement Unit(慣性測定ユニットにおける複数の誤りの特定)", 7th Workshop on Advanced Control and Diagnosis (ACD '2009), Zielona Gora, Pl, November 2009
【非特許文献2】Nguyen H V, et al., "Diagnosis of an inertial measurement unit based on set membership estimation(セットメンバシップ推定に基づく慣性測定ユニットの診断)", Control and Automation, 2009, Med ≪09≫, 17th Mediterranean Conference on, IEEE Piscataway, NJ, USA, 24 June 2009, pp. 211-216
【非特許文献3】Michele Basseville, Igor V. Nikiforov, "Detection of Abrupt Changes-Theory and Application(急激な変化の検出−理論と応用)", Premntice-Hall, Inc., ISBN 0-13-126780-9, April 1993, Engelwood Cliffs, NJ, (特に、4.2章および4.2.1章の中の定理参照)
【非特許文献4】S. Lesecq, "Chapitre 2. Traitement du signal pour le diagnostis" dans "Supervision des procedes complexes", (Chapter 2. Signal Processing for diagnostics" in "Supervision of complex methods")(「複合した方法の監視」の中の、第2章、「診断のための信号処理」), Lavoisier, 2007
【非特許文献5】W. H. Steyn, M. J. Jacobs and P. J. Oosthuizen, "A High Performance Star Sensor System for Full Attitude Determination on Microsatellite(マイクロ衛星におけるフルアティチュード判定のための高性能星センサ)", Department of Electronic Engineering, University of Stellenbosch, Stellenbosch 7600, South Africa
【発明の概要】
【発明が解決しようとする課題】
【0014】
本発明は、センサ間の冗長性、また互いに異なる測定値に結合している特定のモデルを必要としない3軸センサにより、誤りを有する測定軸を特定する方法を提供することを目的としている。
【課題を解決するための手段】
【0015】
従って、本発明の目的は、この種の方法であって、ベクトルbejを、
− ベクトルriおよびrjのスカラー積およびベクトル積と、
− ベクトルbmiの測定値とから、ベクトルbmiに対するベクトルbejの方向が、ベクトルriに対するベクトルrjの方向と同一の方向となるように求めることである。
【0016】
移動基準座標系の中では、測定値bmiおよびbmjは、それぞれ、ベクトルriおよびrjに対応している。固定基準座標系の中で、ベクトルriとrjとの間の角度の関係は既知である。従って、測定値bmiおよびbmjが健全であると、すなわち、検出可能ないずれの誤りもなければ、ベクトルbmiとbmjとの間の角度の関係は、ベクトルriとrjとの間の角度の関係と同じである。この性質を利用すれば、センサCiおよびCjの互いに異なる測定値に結合している移動物体の特定のモデルを利用する必要なく、この目的のために、推定値bejを得ることが可能である。従って、この方法は、任意の物体に対して、この物体の幾何形状または性質を事前に知る必要なく、使用することができる。
【0017】
さらに、センサCiおよびCjの測定値の間には、冗長性が存在することはない。最後に、この方法によれば、3軸センサの、誤りを有する測定軸に対して、このセンサの誤りによるものではなくて誤りを有する測定軸を特定することが可能になる。
【0018】
この方法の実施形態は、次に示す特徴の中の1つ以上を備えることができる。
・1つまたは複数の誤りを有する測定軸を特定するステップは、残留ベクトルの各座標をネイマン・ピアソンの仮説検定を適用して、ただ1つの情報ビットに符号化可能なブール値に変換し、これにより兆候ベクトルを求めるステップを備えている。このブールベクトルは、1つの状態の中に誤りが存在し、他の状態の中には、いずれの誤りも存在しないということを示している。
・ベクトルbejの推定値は、次の関係式から生成される。
− ri・rj=bmi・bej
− ‖riΛrj‖=‖bmiΛbej‖
− ‖bej‖=‖rj‖(第1の物理量場において、ノルム‖rj‖が動作空間の任意の点で一定である場合)、または、‖bej/bmi‖=‖rj/ri‖(第1および第2の物理量場において、ベクトルriの振幅とベクトルrjの振幅との比が動作空間の任意の点で一定である場合)。
ここで、
− 記号「・」は、スカラー積を取る操作であり、
− 記号「Λ」は、ベクトル積を取る操作であり、
− ‖x‖は、ベクトルのユークリッドノルムである。
・移動基準座標系の軸は、センサCjの測定軸と一致している。
・本発明の方法は、
− 誤差±ε‖ri‖の範囲内で、関係式‖ri‖=‖bmi‖(εは、0.25以下の定数、および、‖...‖は、ベクトルのノルムを示す)が満足されることを検証するステップと、
− この関係式が検証されない場合には、ベクトルriおよびrjのスカラー積およびベクトル積から、またベクトルbmiの測定値からベクトルbejを生成することを系統的に禁止し、この関係式が検証された場合には、ベクトルbejを生成するステップとを備えている。
・第1の場および第2の場は、2つの異なる物理量によって生ずる場、または、第1の場および第2の場は、同じ物理量によって生ずる同じ場である。
・第1の場および第2の場は、地球の磁場または重力場から選択される。
・センサCjおよびCiによる測定値は、それぞれ、第1の場および第2の場に対する測定値であり、従って、固定基準座標系の中における、正規化ベクトルriおよびrjのスカラー積およびベクトル積は、動作空間の中の各点において同一である。
【0019】
この方法の実施形態は、更に、次に示す利点を有する。
− 残留ベクトルの座標をブール値に変換して、1つまたは複数の誤りを有する測定軸を特定することにより、誤りを有する測定軸の検出の信頼度を向上させることができる。
− 正規化ベクトルriおよびrjが、動作空間の各点において同一であるように、第1の場および第2の場を測定することにより、動作空間の中での移動物体の位置、または運動に対する知識の必要性をなくすことができる。
【0020】
本発明の目的はまた、情報記録媒体を提供することであり、この情報記録媒体は、上記で述べた方法をコンピュータによって実行する際に、実行するための命令を備えることができる。
【0021】
最後に、本発明の目的はまた、固定基準座標系の中で移動物体の上に固定された3軸センサCjの、誤りを有する測定軸を特定するための装置を提供することである。この3軸センサCjは、移動物体に対して自由度なく固定されている移動基準座標系の中の測定点において、物理量によって生ずる第1の場の方向を与えるベクトルbmjを測定する。
この装置は、
−同じ移動物体に固定されている3軸センサCiと、センサCiおよびCjの測定値を捕捉することができる電子処理ユニット(12)とを備えている。この3軸センサCiは、同じ移動基準座標系の中で、同じ測定点において物理量によって生ずる第2の場の方向を与えるベクトルbmiを測定することができる。また、第1の場および第2の場は、移動物体の運動が内部に限定されている動作空間の各点で、ベクトルrjおよびriによって表され、ベクトルrjおよびriは、それぞれ、この点における場の方向を与えている。これら第1の場および第2の場に関しては、固定基準座標系の中で、正規化ベクトルriおよびrjのスカラー積およびベクトル積は、この動作空間の各点において既知である。この処理ユニット(12)は、次に示すようにプログラムされている。
・測定点におけるセンサCjによる測定値の推定値に対応したベクトルbejを、測定値bmjを使用せずに生成する。
・ベクトルbejとbmjとの間の差を算出し、残留ベクトルを求める。この残留ベクトルは、移動基準座標系の各軸に沿った座標に対して、移動基準座標系のこの軸の上の、ベクトルbejおよびbmjの座標の間の差に対応する残量を有する。
・誤りを有するセンサCjの1つまたは複数の測定軸を、移動基準座標系の各軸の上で算出された残量の関数として特定する。
・ベクトルbejを、ベクトルbmiに対するベクトルbejの方向が、ベクトルriに対するベクトルrjの方向と同一になるように、
− ベクトルriおよびrjのスカラー積およびベクトル積と、
− ベクトルbmiの測定値とから形成する。
【0022】
以下の説明により、本発明をより明確に理解しうると思う。なお以下の説明は、図面を参照して、単に非網羅的な例に関して行うものである。
【図面の簡単な説明】
【0023】
【図1】移動物体の方向を判定するためのシステムを示す図である。
【図2】誤りを有する測定軸を特定し、図1に示す移動物体の方向を判定するための方法を示すフローチャートである。
【図3】図2に示す方法によって得られた種々の異なる実験結果を表すグラフである。
【図4】図2に示す方法によって得られた種々の異なる実験結果を表すグラフである。
【図5】図2に示す方法によって得られた種々の異なる実験結果を表すグラフである。
【図6】図2に示す方法によって得られた種々の異なる実験結果を表すグラフである。
【図7】図2に示す方法によって得られた種々の異なる実験結果を表すグラフである。
【図8】図2に示す方法によって得られた種々の異なる実験結果を表すグラフである。
【発明を実施するための形態】
【0024】
各図において、同じ符号は、同じ要素を示している。
【0025】
以下において、当業者に公知の特徴および機能については、詳細に説明しない。
【0026】
図1は、固定基準座標系Rの中における移動物体4の方向を判定するためのシステム2を示す。また方向は、「アティチュード」とも呼ばれている。
【0027】
固定基準座標系Rは、互いに直交する方向を示す3つの軸Xr、Yr、およびZrで定義される。基準座標系Rは、正規直交系であることが望ましい。これらの軸は、点Orで交わり、点Orは、基準座標系Rの原点を形成している。点Orは、自由度なく大地に結合されている。
【0028】
移動物体4は、固定基準座標系Rの中で移動することができる。この目的のために、移動物体4は、推進するための手段(モータ等)を備えているか、または、移動物体4の外部の推進手段で移動することができるようになっている。例えば、移動物体4は、人体の中に導入されたカテーテルである。
【0029】
移動物体4は、所定の動作空間6の内部で移動する。動作空間6は、典型的に、3次元空間である。図1では、表現を簡単にするために、この動作空間は、長円形の破線で示してある。動作空間6は、自由度なく基準座標系Rに結合されている。
【0030】
移動基準座標系Bは、自由度なく、移動物体4に結合されている。この基準座標系Bは、正規直交系であることが望ましく、互いに直交する方向を示す3つの軸Xb、Yb、およびZbによって定められている。この基準座標系Bの原点は、Obで示されている。
【0031】
システム2は、慣性測定ユニット10を有し、この慣性測定ユニット10は、自由度なく移動物体4に固定されている。また慣性測定ユニット10は、固定基準座標系Rの中で移動物体4の方向を測定する。更に具体的には、慣性測定ユニット10によって、基準座標系Rの各軸Xr、Yr、およびZrに対する、移動物体4の傾きを測定することができる。
【0032】
この目的のために、慣性測定ユニット10は、処理ユニット12に接続された2つのセンサCiおよびCjを備えている。
【0033】
この実施形態においては、センサCiおよびCjは、それぞれ、3軸加速度計、および3軸磁力計である。
【0034】
これらのセンサCiおよびCjは、基準座標系Bの中に固定されている。
【0035】
センサCiは、移動物体4の加速度の、3つの測定軸18〜20の上への、軸と直交する方向からの射影を測定する。3つの測定軸18〜20は、互いに平行ではない。ここでは、これらの軸18〜20は、互いに直交している。表示を簡単にするために、軸18〜20は、それぞれ、基準座標系Bの軸Xb、Yb、Zbと平行になっている。センサCiによって、基準座標系Bの中における移動物体4の加速度の方向および振幅を、直接に測定することが可能なる。本明細書において、「直接に」という用語は、基準座標系Rに対する基準座標系Bの方向を知る必要なく、この測定値を求めることができるという事を示している。センサCiは、特に、地球の重力場の振幅および方向を測定する。本明細書では、「振幅」および「強度」という用語は、同義語として使用する。
【0036】
センサCiの測定値は、3つの座標bxmi、bymi、およびbzmiを有するベクトルbmiの形で示されている。ここで、座標bxmi、bymi、およびbzmiは、それぞれ、軸18〜20に沿って測定した加速度の強度に対応している。
【0037】
センサCjは、互いに平行でない3つの測定軸22〜24の上にある移動物体4の所に存在する静磁場(すなわち、ゼロ周波数の磁場)の、軸に直交する方向からの射影を測定する。ここで、これらの軸22〜24は、それぞれ、軸Xb、Yb、およびZbと平行である。このセンサCjは、基準座標系Bの中における静磁場の方向および振幅を、直接に測定する。従って、センサCjは、地球の磁場の方向および振幅を測定する。
【0038】
センサCjによるこの測定値は、3つの座標bxmj、bymj、およびbzmjを有するベクトルbmjの形を示している。ここで、座標bxmj、bymj、およびbzmjは、それぞれ、軸22〜24に沿って測定値した静磁場の強度に対応している。
【0039】
基準座標系Rの中における、それぞれ、地球の重力場および磁場の測定値もまた、ベクトルriおよびrjの形で示されている。ベクトルbmiおよびbmjの場合と同様に、これらの2つのベクトルriおよびrjは、それぞれ、3つの座標(rxi、ryi、rzi)および(rxj、ryj、rzj)を有する。座標rxi、ryi、およびrziは、それぞれ、軸Xr、Yr、およびZrに沿った地球の重力場の強度の測定値に対応している。座標rxj、ryj、およびrzjは、それぞれ、軸Xr、Yr、およびZrに沿った地球の磁場強度の測定値に対応している。
【0040】
動作空間6は、小さく限定されているので、ベクトルriおよびrjの間における角度の関係は、この動作空間の各点において同一であると考えることができる。これは、特に、動作空間6の中の任意の点において、次に示す2つの関係式が検証されるという事実によって表現することができる。
(1)rni・rnj=α
(2)‖rniΛrnj‖=β
ここで、
− rniおよびrnjは、ベクトルriおよびrjの正規化ベクトルであり、
− 記号「・」は、スカラー積を取る操作であり、
− 記号「Λ」は、ベクトル積を取る操作であり、
− ‖x‖は、ベクトルxのユークリッドノルムであり、
− αおよびβは、考慮している動作空間6の点に対して無関係な定数である。
【0041】
上記の2つの関係式が検証された場合には、場は、基準場であると呼ばれ、ベクトルriおよびrjは、基準ベクトルである。
【0042】
さらに、ここでは、動作空間6は、小さく限定されているので、ベクトルriおよびrjのノルムは、動作空間6の各点において同一であると考えることができる。従って、次に示す関係式もまた検証することができる。
(3)ri・rj=A
(4)‖riΛrj‖=B
ここで、AおよびBは、定数である。
【0043】
これらの仮説と表示式とを使用すると、移動物体4が準静的な状態である場合には、ベクトルbmiおよびbmjは、それぞれ、ベクトルriおよびrjに対応している。しかし、これらは、基準座標系Rではなくて、基準座標系Bの中で表現されている。
【0044】
本明細書において、「準静的な」という用語は、測定値bmiに対する移動物体4自身の加速度の寄与は、地球の重力場の寄与と比較して、無視することができるという事を示している。例えば、移動物体4が、±ε‖bmi‖(εは定数)の範囲内で‖ri‖=‖bmi‖である場合には、移動物体4は、準静的な状態にあると考えることができる。εの値は、考慮する応用によって決まる。例えば、εの値は、0.25以下であり、更には、0.1、または0.05、または0.01以下であることが望ましい。
【0045】
従って、移動物体4が準静的な状態にあり、センサCiおよびCjの全ての測定軸が誤っていないとすれば、ベクトルbmiとbmjとの間の角度の関係は、ベクトルriとrjとの間の角度の関係と同じである。この性質は、処理ユニット12によって利用され、センサCiおよびCjの、1つ以上の誤りを有する測定軸を特定することができる。
【0046】
処理ユニット12は、測定値bmjおよびbmiを処理し、その結果から、固定基準座標系Rの中での移動物体4の方向を導出することができる。処理ユニット12はまた、ベクトルbmjおよびbmiの測定値から、センサCiおよびCjの、1つ以上の誤りを有する測定軸を特定することができる。処理ユニット12は、移動物体4に固定されていてもよいし、固定されていなくてもよい。ここでは、処理ユニット12が、自由度なく移動物体4に固定されているという特定の場合について説明する。しかしながら、簡単にするために、図1では、処理ユニット12は、移動物体4の外部に描かれている。
【0047】
例えば、この処理ユニット12は、プログラム可能なコンピュータ30によって構成されている。コンピュータ30は、情報記録媒体の上に記録された命令を実行することができる。この目的のために、コンピュータ30は、メモリ32に接続され、メモリ32は、図2に示す方法を実行するために必要なデータおよび命令を含んでいる。
【0048】
更に、ここでは、処理ユニットはまた、コンピュータ30に接続されたマンマシンインタフェース34(スクリーン等)を備え、センサCiおよびCjの、1つまたは複数の誤りを有する測定軸を、人に対して通知する。
【0049】
センサCiおよびCjの中の1つと処理ユニット12とを組み合わせることにより、これらのセンサの中で、他方のセンサの、誤りを有する測定軸を特定する装置を構成することができる。
【0050】
次に、図2に示す方法を参照して、システム2の動作について説明する。
【0051】
この方法は、較正ステップ50から開始される。このステップ50の間では、移動物体4はまだ、基準座標系Bに対して既知の方向にある固定基準座標系Rの中に保持されている。その後、ベクトルriおよびrjは、センサCiおよびCjによって測定され、それらの座標は、基準座標系Rの中で表される。この較正ステップの間は、これらセンサのいずれの測定軸も、誤りではないと仮定されている。
【0052】
その後、段階52では、センサCjの、誤りを有する測定軸を特定する。
【0053】
この段階52は、ステップ54で始まる。ステップ54では、ベクトルbmiおよびbmjを測定し、それにより、センサCiが使用可能であることを確認する。このステップの目的は、センサCjの測定軸の中の1つにおける誤りを特定するために、センサCiが使用可能であるということを検証するだけである。このセンサCiは、誤っていない場合、または準静的状態でない場合には、使用可能であると考えられる。従って、ここでは、この段階52においては、センサCiの、1つまたは複数の誤りを有する測定軸を特定することは行わない。
【0054】
例えば、この実施形態においては、±ε‖ri‖(εは、考えている用途に従って、事前に決められた定数)の範囲内で、次に示す関係式(5)が検証された場合には、センサCiは使用可能であると考えられる。例えば、εの値は、0.25以下であり、また、0.1、または0.05、または0.01以下であることが望ましい。
(5)‖ri‖=‖bmi‖
ここで、‖...‖は、ベクトルのノルムを示している。
【0055】
センサCiが使用可能ではないと考えられる場合には、この方法は、直接に段階56に進み、センサCiの、誤りを有する測定軸を特定する。
【0056】
センサCiが使用可能であると考えられる場合には、ステップ58において、コンピュータ30は、ベクトルbejを生成する。ベクトルbejは、センサCjによる測定値の推定値に対応している。この測定値は、全ての測定軸の上で、誤りが存在しない場合に得られると考えられる。この推定値は、測定値bmj、または移動物体4のモデル、または基準座標系Rの中での移動物体4の位置、または方向を使用せずに生成することができる。この目的のために、本発明は、センサCjの測定軸の上に誤りが存在しない場合には、ベクトルbejとbmiとの間の角度の関係は、ベクトルrjとriとの間の角度の関係と同一であるという性質を使用する。さらに、ここでは、ベクトルbejおよびbmiのノルムは、それぞれ、ベクトルrjおよびriのノルムと同一でなければならない。角度の関係とノルムとが保持されることにより、次に示す連立方程式を得ることができる。
(6)rj・ri=bej・bmi
(7)‖rjΛri‖=‖bejΛbmi‖
(8)‖rj‖=‖bej‖
【0057】
これらの方程式を解くと、ベクトルbejの座標が求められる。例えば、ベクトルbejの座標を求めるために、次に示す量を最小にするベクトルbejの座標を、最小2乗法によって求める。
(9)rj・ri−bej・bmi
(10)‖rjΛri‖−‖bejΛbmi‖
(11)‖rj‖−‖bej‖
【0058】
ベクトルbejが生成されると、ステップ60において、コンピュータ30は、残留ベクトルVrjを算出する。このベクトルVrjは、次に示す関係式によって定義される。
(12)Vrj=bej−bmj
【0059】
従って、ベクトルVrjの各座標は、残量であり、この残量は、基準座標系Bの同じ軸の上のベクトルbejおよびbmjの座標の間の差の関数である。
【0060】
センサCjの測定軸の上に誤りがない場合には、ベクトルVrjの座標は、ゼロ±誤差余裕(特に、ベクトルbmjおよびbmiの測定値に存在する雑音に関係する余裕)と等しくなるべきである。
【0061】
ステップ62において、コンピュータ30は、残留ベクトルVrjから、センサCjの、1つまたは複数の誤りを有する測定軸を特定する。
【0062】
例えば、ステップ64において、コンピュータ30は、ベクトルVrjを兆候ベクトルVsjに変換する。この目的のために、ベクトルVrjの各座標は、仮説検定を適用することにより、ブール値に変換される。ここでは、仮説検定は、ネイマン・ピアソン検定である。このネイマン・ピアソン検定は、例えば、非特許文献3、4に記述されている。
【0063】
例えば、検定の種々のパラメータは、次に示すように選択される。
− 仮説H0:誤りがない場合の平均値は、0に固定される。
− 仮説H1:誤りがある場合の平均値は、0.1以上である。
− 誤り警報の確率は、5%に等しいとする。
【0064】
従って、ステップ66では、コンピュータ30は、兆候ベクトルVsjを誤りシグナチャテーブルと比較する。この誤りシグナチャテーブルは、例えば、次に示す表である。
【0065】
fmx、fmy、およびfmzに対する列は、それぞれ、測定軸22〜24の上の誤りに対応している。Sxj、Syj、およびSzjに対する行は、軸Xb、Yb、およびZbの上におけるベクトルVsjの座標に対応している。
【0066】
この表の中では、fmx、fmy、およびfmzに対する列の中の符号「1」は、対応する測定軸の上には誤りが存在するということを意味している。一方、符号「0」は、対応する測定軸の上には誤りが存在しないということを意味している。
【0067】
従って、兆候(1,0,0)は、このシグナチャテーブルから、測定軸22だけが誤りを有していることを意味すると解釈される。
【0068】
別の例として、兆候(1,1,0)は、センサCjの測定軸22および23だけが誤りを有するということを意味している。
【0069】
段階52の中でステップ62の終了した後に、コンピュータは、段階56を実行し、センサCiの、誤りを有する測定軸を特定する。この段階56は、例えば、段階52と同様の様式で実行される。例えば、段階56は、上記で記述した段階52と同様の様式で実行される。しかし、インデクスiをインデクスjに置き換え、またインデクスjをインデクスiに置き換える。段階56では、シグナチャテーブルは、兆候ベクトルVsiから求められた軸22〜24の上の誤りを示している。
【0070】
ステップ54において、2つのセンサCiおよびCjがどちらも「使用不可能」と判定された場合には、1つまたは複数の誤りを有する測定軸を正確に特定することは不可能になるということにも、留意されたい。この場合には、コンピュータ30は、誤りを有する測定軸を特定せずに、センサCiおよびCjが誤っていることを示すだけになる。
【0071】
段階52および段階56は、正規の間隔で反復される。また同時に、誤りを有する測定軸に関して得られた情報は、ステップ70において、コンピュータ30が移動物体4の方向を判定する際に考慮に入れられる。例えば、1つまたは複数の誤りを有する測定軸を特定したことに応答して、1つまたは複数の誤りを有する測定軸の上での測定値を使用せずに、移動物体4の方向が判定される。誤りを有する軸の上における測定値を使用することもまた可能である。しかし、この場合には、これらの測定値に対して、重み係数を与える。この重み係数は、移動物体4の方向を判定する際に、測定値に対してより低い重みを与える。
【0072】
1つ以上の誤りを有する測定軸を特定したことに応答して、コンピュータ30はまた、これら誤りを有する軸が存在していることを、マンマシンインタフェース34を通して、システム2のユーザに通知する。
【0073】
図3〜図5においては、曲線70〜72は、それぞれ、残留ベクトルVriの各座標の時間に対する変化を示している。これらと同じグラフの上で、曲線74〜76は、兆候ベクトルVsiの座標の時間に対する変化を示している。これらのグラフのx軸は、秒で目盛られている。
【0074】
これらの曲線は、1秒から4秒の間に、センサCiの3つの測定軸の上で、誤りが同時に現れた特定の場合に得られたものである。また6秒以降に、測定軸23の上に誤りが現れている(図4参照)。
【0075】
図6〜図8は、それぞれ、軸18〜20に沿う残留ベクトルVrjの座標の時間に対する変化を示す。これらは、図3〜図5と同じ時間間隔の間を示している。
【0076】
これらのグラフは、ディジタルシミュレーションによって得られたものである。これらの図から、図2に示す方法によって、単一の誤りを有する測定軸ばかりでなく、複数の誤りを有する測定軸を、同時に検出および特定することができるということが分かる。
【0077】
多くの他の実施形態も可能である。例えば、ベクトルbmi、bmj、ri、およびrjの間の角度の関係だけを使用して、これらベクトルのノルムの間の関係は使用しない実施形態も可能である。この目的のために、関係式(6)〜(8)においては、非正規化ベクトル、それぞれbmj、bmi、rj、およびriの代わりに、これらの正規化ベクトルbnmj、bnmi、rnjおよびrniを使用する。この場合には、関係式(8)を、‖bej‖=1とすることができる。この実施形態においては、センサCiおよびCjは、物理量によって生ずる場の振幅を測定する必要はなく、場の方向だけを測定すればよい。更に、ベクトルriおよび/またはrjのノルムは、動作空間の各点において一定である必要はない。
【0078】
また、動作空間の任意の点において、ベクトルriおよびrjの振幅の比が一定である場合には、関係式(8)は、‖bej‖/‖bmi‖=‖rj‖/‖ri‖と置き換えることができる。
【0079】
別の実施形態においては、ベクトルriおよびrjのスカラー積およびベクトル積は、動作空間の各点において一定である必要はない。事実、これらの積の値は、動作空間の各点において既知であることで十分である。この場合には、例えば、事前記録された表によって、それぞれ、ベクトルriおよびrjのスカラー積、およびベクトル積α(x,y,z)、およびβ(x,y,z)の値を、動作空間の各点の座標x、y、zに関係づけることができる。従って、センサCjの、誤りを有する軸を特定する際に、式(9)、(10)、および(11)の代わりに、次に示す式を使用して、ベクトルbejを推定することができる。
α(x,y,z)−bej・bmi
β(x,y,z)−‖bejΛbmi‖
‖rj‖−‖bej‖
【0080】
値α(x,y,z)およびβ(x,y,z)は、移動物体の位置に関する情報と、事前記録された表とにより求めることができる。移動物体の位置を知るには、種々の方法がある。例えば、この位置は、他のセンサによって測定することができる。また、移動物体を、動作空間の既知の点に置くようにし、移動物体が空間のその既知の点に位置している時にだけ、本方法を実行し、誤りを有する軸を特定することができる。この変形では、正規化ベクトルを使用することが望ましい。
【0081】
基準の場としては、地球の磁場および地球の重力場以外の場も存在する。例えば、星センサによって、星が位置する方向を測定することができる。測定された方向を固定して、固定基準座標系の各点において同じとすることができる。例えば、この場合には、固定基準座標系は、地球を中心とした基準座標系である。この種の星センサに関しては、非特許文献5において詳細に記述されている。
【0082】
基準場はまた、例えば、動作空間の中に置いた永久磁石、または電気コイルによって、人工的に生成することもできる。
【0083】
全ての基準場は、同じ値であるとすることもでき、従って、ベクトルriおよびrjも同じ値にすることができる。例えば、簡単化した実施形態では、ただ1つの基準場を使用することができる。この場合には、センサCiおよびCjは、同じ場を測定する。これら2つの同一のセンサの測定軸は、必ずしも互いに平行である必要はない。従って、センサCiおよびCjは、どちらも加速度計であってよい。
【0084】
センサCiおよびCjは、どちらもが、移動基準座標系Bの中に固定されている必要はない。実際、2つのセンサの中の1つは、移動基準座標系Bの中で、他方に対して移動していてもよい。この場合には、瞬時瞬時に、移動基準座標系の中における移動センサの方向は、既知であって、その測定値が移動基準座標系の中で表現されるベクトルに変換できる必要がある。
【0085】
誤りを有する測定軸を、残留ベクトルから特定するための、他の方法も可能である。例えば、1つの変形として、残留ベクトルの座標の中の1つが所定の閾値を超えた場合には、この座標に対応する測定軸は、誤りを有すると考えることができる。
【0086】
1つの変形として、移動基準座標系の軸は、測定軸と一致する必要はない。この実施形態は、基準座標系の簡単な変換によって、容易に、ここに記述されている実施形態の場合に関連づけることができる。
【0087】
残留ベクトルを計算するための他の方法も可能である。
【0088】
残留ベクトルとシグナチャテーブルとの比較は、他の様式で行うこともできる。例えば、シグナチャテーブルは、各測定軸の上での残留ベクトルの各座標に対して、閾値Siを規定することもできる。残留ベクトルがこの閾値を超えた測定軸は、誤りを有すると考えることができる。
【0089】
3軸センサは、4つ以上の測定軸を有することができる。この場合には、ベクトルは、3つの座標を有するのではなく、測定軸と同じ数の座標を有することができる。
【0090】
上記で述べた実施形態は、移動物体が固定基準座標系の中を移動する特定の場合について説明している。しかしながら、ここで説明する方法は、2つの基準座標系の中の1つが、他方に対して移動している全ての場合に対して適用することができる。
【0091】
同様に、センサCiおよびCjの測定軸は、互いに平行である必要はない。この場合も、基準座標系の簡単な変換によって、互いに平行である状況に変換することが可能である。
【0092】
2つの3軸センサを使用する特定の場合について説明した事柄は、N個の3軸センサの場合に対しても適用することができる。ここで、Nは、2以上の整数である。この場合には、各3軸センサは、物理量によって生ずる自分自身の基準場を測定することができなければならず、それにより、少なくともN個の基準ベクトル(すなわち、各センサに対して1つの基準ベクトル)が得られなければならない。このベクトルbejは、上記で述べた場合と同じ角度の関係から生成される。しかし、この場合には、「使用可能」と考えられるセンサだけを含んでいる、K個(Kは2以上の整数)からなるセンサCiのグループにおける、それぞれのセンサに対して求められることが望ましい。
【0093】
誤りを有する測定軸を特定するための本発明の方法は、人体の運動機能の回復、または衛星のオリエンテーション等の、多くの技術分野に適用することができる。
【符号の説明】
【0094】
2 システム
4 移動物体
6 動作空間
10 慣性測定ユニット
12 処理ユニット
18、19、20、22、23、24 測定軸
30 コンピュータ
32 メモリ
34 マンマシンインタフェース
50 較正ステップ
52 センサCjの誤りを有する測定軸を特定する段階
54 bmiとbmjとを測定するステップ
56 センサCiの誤りを有する測定軸を特定する段階
58 bejを生成するステップ
60 残留ベクトルを求めるステップ
62 センサCjの誤りを有する測定軸を特定するステップ
64 VrjをVsjに変換するステップ
66 Vsjをシグナチャテーブルと比較するステップ
70 反復するステップ
70、71、72 残留ベクトルVriの変化
74、75、76 兆候ベクトルVsiの変化
B 移動基準座標系
Ci、Cj センサ
Ob 移動基準座標系Bの原点
Or 固定基準座標系Rの原点
R 固定基準座標系
Xb、Yb、Zb 移動基準座標系B座標軸
Xr、Yr、Zr 固定基準座標系Rの座標軸
【特許請求の範囲】
【請求項1】
固定基準座標系の中の移動物体に固定されている3軸センサの、誤りを有する測定軸を特定するための方法であって、
− 前記移動物体に固定されている3軸センサCjによって、前記移動物体に自由度なく固定されている移動基準座標系の中の測定点における、物理量によって生ずる第1の場の方向を与える、ベクトルbmjを測定するステップ(54)と、
− 同じ移動物体に固定されている3軸センサCiによって、同じ移動基準座標系の中の同じ測定点における、物理量によって生ずる第2の場の方向を与える、ベクトルbmiを測定するステップ(54)と、
− 前記測定点における前記センサCjによる測定値の推定値に対応するベクトルbejを、前記測定値bmjを使用せずに生成するステップ(58)と、
− 前記ベクトルbejとbmjとの間の差を算出し、前記移動基準座標系のこの軸の上の、前記ベクトルbejおよびbmjの座標の間の差に対応する残量を有し、前記移動基準座標系の各軸に沿った座標として表される残留ベクトルを求めるステップ(60)と、
− 誤りを有する前記センサCjの1つまたは複数の測定軸を、前記移動基準座標系の前記軸のそれぞれの上で算出された前記残量の関数として特定するステップとを備え、
前記第1および第2の場は、前記移動物体の運動が限定されている動作空間の任意の点において、この点における前記場の方向を与える、それぞれのベクトルrjおよびriによって表され、前記第1および第2の場は、前記固定基準座標系の中で、前記正規化ベクトルriおよびrjのスカラー積およびベクトル積は、前記動作空間の任意の点において既知であり、
前記ベクトルbejを生成する前記ステップは、前記ベクトルbmiに対する前記ベクトルbejの方向が、前記ベクトルriに対する前記ベクトルrjの方向と同一となるように、
− 前記ベクトルriおよびrjの前記スカラー積およびベクトル積を取るステップと、
− 前記ベクトルbmiの測定値とから求めるステップとを含んでいることを特徴とする方法。
【請求項2】
前記誤りを有する1つまたは複数の測定軸を特定する前記ステップ(62)は、前記残留ベクトルの各座標を、ネイマン・ピアソンの仮説検定を適用することにより、ただ1つの情報ビットに符号化することができるブール値に変換して、兆候ベクトルを求めるステップ(64)を備え、前記ブールベクトルは、1つの状態には誤りが存在し、他の状態にはいずれの誤りも存在していないことを示していることを特徴とする、請求項1に記載の方法。
【請求項3】
前記ベクトルbejの前記推定値は、関係式
− ri・rj=bmi・bejと、
− ‖riΛrj‖=‖bmiΛbej‖と、
− 前記第1の物理量の場において、前記動作空間の任意の点でノルム‖rj‖が一定である場合には、‖bej‖=‖rj‖と、または、前記第1および第2の物理量の場において、前記ベクトルriおよびrjの振幅の比が、前記動作空間の任意の点において一定である場合には、‖bej/bmi‖=‖rj/ri‖とから生成され(58)、
− 記号「・」は、スカラー積を取る操作であり、
− 記号「Λ」は、ベクトル積を取る操作であり、
− ‖x‖は、ベクトルのユークリッドノルムであることを特徴とする、請求項1または2に記載の方法。
【請求項4】
前記移動基準座標系の前記軸は、前記センサCjの前記測定軸と一致することを特徴とする、請求項1〜3のいずれか1項に記載の方法。
【請求項5】
εを0.25以下の定数とし、‖...‖をベクトルノルムとした時に、±ε‖ri‖の範囲内で、‖ri‖=‖bmi‖であることを検証するステップと、
この関係式が検証されない場合には、前記ベクトルriおよびrjの前記スカラー積およびベクトル積から、また、前記ベクトルbmiの前記測定値から、前記ベクトルbejの生成を系統的に禁止し、検証された場合には、前記ベクトルbejを生成するステップとを備えていることを特徴とする、請求項1〜4のいずれか1項に記載の方法。
【請求項6】
前記第1および第の場は、異なる2つの物理量によって生ずる場であることを特徴とする、請求項1〜5のいずれか1項に記載の方法。
【請求項7】
前記第1および第2の場は、同じ物理量によって生ずる同じ場であることを特徴とする、請求項1〜5のいずれか1項に記載の方法。
【請求項8】
前記第1および第2の場は、地球の磁場または重力場から選択されることを特徴とする、請求項1〜7のいずれか1項に記載の方法。
【請求項9】
前記センサCjおよびCiによる前記測定値は、前記固定基準座標系の中における、前記正規化ベクトルriおよびrjの前記スカラー積およびベクトル積が、前記動作空間の各点において同一である場合の、それぞれ、前記第1および第2の場の測定値であることを特徴とする、請求項1〜8のいずれか1項に記載の方法。
【請求項10】
請求項1〜9のいずれか1項に記載の方法をコンピュータによって実行するための命令を備えていることを特徴とする情報記録媒体(32)。
【請求項11】
固定基準座標系の中の移動物体に固定されている3軸センサCjの、誤りを有する測定軸を特定するための装置であって、
前記3軸センサCjは、前記移動物体に自由度なく固定されている移動基準座標系の中の測定点において、物理量によって生ずる第1の場の方向を与えるベクトルbmjを測定し、
かつこの装置は、
− 同じ移動物体に固定され、同じ移動基準座標系の中の同じ測定点において、物理量によって生ずる第2の場の方向を与えるベクトルbmiを測定することができる3軸センサCiと、
− 前記センサCiおよびCjの測定値を捕捉することができる電子処理ユニット(12)とを備え、
前記第1および第2の場は、前記移動物体の運動が限定されている動作空間の任意の点において、この点における前記場の方向を与える、それぞれ、ベクトルrjおよびriによって表され、前記第1および第2の場は、前記固定基準座標系の中で、前記正規化ベクトルriおよびrjのスカラー積およびベクトル積は、前記動作空間の任意の点において既知であり、
前記処理ユニットは、
− 前記測定点における、前記センサCjによる、前記測定値の推定値に対応するベクトルbejを、前記測定値bmjを使用せずに生成し、
− 前記ベクトルbejとbmjとの間の差を算出し、前記移動基準座標系のこの軸の上の、前記ベクトルbejおよびbmjの座標の間の差に対応する残量を有し、前記移動基準座標系の各軸に沿った座標として表される残留ベクトルを求め、
− 誤りを有するセンサCjの1つまたは複数の測定軸を、前記移動基準座標系の前記軸の、それぞれの上で算出された前記残量の関数として特定するようにプログラムされ、
前記処理ユニット(12)は、前記ベクトルbejを、前記ベクトルbmiに対する前記ベクトルbejの方向が、前記ベクトルriに対する前記ベクトルrjの方向と同一であるように、
− 前記ベクトルriおよびrjの前記スカラー積およびベクトル積と、
− 前記ベクトルbmiの測定値とから生成するようにプログラムされていることを特徴とする装置。
【請求項1】
固定基準座標系の中の移動物体に固定されている3軸センサの、誤りを有する測定軸を特定するための方法であって、
− 前記移動物体に固定されている3軸センサCjによって、前記移動物体に自由度なく固定されている移動基準座標系の中の測定点における、物理量によって生ずる第1の場の方向を与える、ベクトルbmjを測定するステップ(54)と、
− 同じ移動物体に固定されている3軸センサCiによって、同じ移動基準座標系の中の同じ測定点における、物理量によって生ずる第2の場の方向を与える、ベクトルbmiを測定するステップ(54)と、
− 前記測定点における前記センサCjによる測定値の推定値に対応するベクトルbejを、前記測定値bmjを使用せずに生成するステップ(58)と、
− 前記ベクトルbejとbmjとの間の差を算出し、前記移動基準座標系のこの軸の上の、前記ベクトルbejおよびbmjの座標の間の差に対応する残量を有し、前記移動基準座標系の各軸に沿った座標として表される残留ベクトルを求めるステップ(60)と、
− 誤りを有する前記センサCjの1つまたは複数の測定軸を、前記移動基準座標系の前記軸のそれぞれの上で算出された前記残量の関数として特定するステップとを備え、
前記第1および第2の場は、前記移動物体の運動が限定されている動作空間の任意の点において、この点における前記場の方向を与える、それぞれのベクトルrjおよびriによって表され、前記第1および第2の場は、前記固定基準座標系の中で、前記正規化ベクトルriおよびrjのスカラー積およびベクトル積は、前記動作空間の任意の点において既知であり、
前記ベクトルbejを生成する前記ステップは、前記ベクトルbmiに対する前記ベクトルbejの方向が、前記ベクトルriに対する前記ベクトルrjの方向と同一となるように、
− 前記ベクトルriおよびrjの前記スカラー積およびベクトル積を取るステップと、
− 前記ベクトルbmiの測定値とから求めるステップとを含んでいることを特徴とする方法。
【請求項2】
前記誤りを有する1つまたは複数の測定軸を特定する前記ステップ(62)は、前記残留ベクトルの各座標を、ネイマン・ピアソンの仮説検定を適用することにより、ただ1つの情報ビットに符号化することができるブール値に変換して、兆候ベクトルを求めるステップ(64)を備え、前記ブールベクトルは、1つの状態には誤りが存在し、他の状態にはいずれの誤りも存在していないことを示していることを特徴とする、請求項1に記載の方法。
【請求項3】
前記ベクトルbejの前記推定値は、関係式
− ri・rj=bmi・bejと、
− ‖riΛrj‖=‖bmiΛbej‖と、
− 前記第1の物理量の場において、前記動作空間の任意の点でノルム‖rj‖が一定である場合には、‖bej‖=‖rj‖と、または、前記第1および第2の物理量の場において、前記ベクトルriおよびrjの振幅の比が、前記動作空間の任意の点において一定である場合には、‖bej/bmi‖=‖rj/ri‖とから生成され(58)、
− 記号「・」は、スカラー積を取る操作であり、
− 記号「Λ」は、ベクトル積を取る操作であり、
− ‖x‖は、ベクトルのユークリッドノルムであることを特徴とする、請求項1または2に記載の方法。
【請求項4】
前記移動基準座標系の前記軸は、前記センサCjの前記測定軸と一致することを特徴とする、請求項1〜3のいずれか1項に記載の方法。
【請求項5】
εを0.25以下の定数とし、‖...‖をベクトルノルムとした時に、±ε‖ri‖の範囲内で、‖ri‖=‖bmi‖であることを検証するステップと、
この関係式が検証されない場合には、前記ベクトルriおよびrjの前記スカラー積およびベクトル積から、また、前記ベクトルbmiの前記測定値から、前記ベクトルbejの生成を系統的に禁止し、検証された場合には、前記ベクトルbejを生成するステップとを備えていることを特徴とする、請求項1〜4のいずれか1項に記載の方法。
【請求項6】
前記第1および第の場は、異なる2つの物理量によって生ずる場であることを特徴とする、請求項1〜5のいずれか1項に記載の方法。
【請求項7】
前記第1および第2の場は、同じ物理量によって生ずる同じ場であることを特徴とする、請求項1〜5のいずれか1項に記載の方法。
【請求項8】
前記第1および第2の場は、地球の磁場または重力場から選択されることを特徴とする、請求項1〜7のいずれか1項に記載の方法。
【請求項9】
前記センサCjおよびCiによる前記測定値は、前記固定基準座標系の中における、前記正規化ベクトルriおよびrjの前記スカラー積およびベクトル積が、前記動作空間の各点において同一である場合の、それぞれ、前記第1および第2の場の測定値であることを特徴とする、請求項1〜8のいずれか1項に記載の方法。
【請求項10】
請求項1〜9のいずれか1項に記載の方法をコンピュータによって実行するための命令を備えていることを特徴とする情報記録媒体(32)。
【請求項11】
固定基準座標系の中の移動物体に固定されている3軸センサCjの、誤りを有する測定軸を特定するための装置であって、
前記3軸センサCjは、前記移動物体に自由度なく固定されている移動基準座標系の中の測定点において、物理量によって生ずる第1の場の方向を与えるベクトルbmjを測定し、
かつこの装置は、
− 同じ移動物体に固定され、同じ移動基準座標系の中の同じ測定点において、物理量によって生ずる第2の場の方向を与えるベクトルbmiを測定することができる3軸センサCiと、
− 前記センサCiおよびCjの測定値を捕捉することができる電子処理ユニット(12)とを備え、
前記第1および第2の場は、前記移動物体の運動が限定されている動作空間の任意の点において、この点における前記場の方向を与える、それぞれ、ベクトルrjおよびriによって表され、前記第1および第2の場は、前記固定基準座標系の中で、前記正規化ベクトルriおよびrjのスカラー積およびベクトル積は、前記動作空間の任意の点において既知であり、
前記処理ユニットは、
− 前記測定点における、前記センサCjによる、前記測定値の推定値に対応するベクトルbejを、前記測定値bmjを使用せずに生成し、
− 前記ベクトルbejとbmjとの間の差を算出し、前記移動基準座標系のこの軸の上の、前記ベクトルbejおよびbmjの座標の間の差に対応する残量を有し、前記移動基準座標系の各軸に沿った座標として表される残留ベクトルを求め、
− 誤りを有するセンサCjの1つまたは複数の測定軸を、前記移動基準座標系の前記軸の、それぞれの上で算出された前記残量の関数として特定するようにプログラムされ、
前記処理ユニット(12)は、前記ベクトルbejを、前記ベクトルbmiに対する前記ベクトルbejの方向が、前記ベクトルriに対する前記ベクトルrjの方向と同一であるように、
− 前記ベクトルriおよびrjの前記スカラー積およびベクトル積と、
− 前記ベクトルbmiの測定値とから生成するようにプログラムされていることを特徴とする装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−101107(P2013−101107A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−224655(P2012−224655)
【出願日】平成24年10月10日(2012.10.10)
【出願人】(510132347)コミサリア ア レネルジ アトミク エ オウ エネルジ アルタナティヴ (51)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2012−224655(P2012−224655)
【出願日】平成24年10月10日(2012.10.10)
【出願人】(510132347)コミサリア ア レネルジ アトミク エ オウ エネルジ アルタナティヴ (51)
[ Back to top ]