
3軸センサ・チップパッケージに関するシステムと方法
【課題】3軸センサ・チップパッケージためのシステムと方法を提供する。
【解決手段】センサパッケージは、ベース105と、第1のセンサダイ110が、第1のアクティブセンサ回路112および、第1のアクティブセンサ回路に電気的に結合された複数の金属パッド114とを備え、ベースに取り付けられた第2のセンサダイ120が、第1の表面128の上に配置された第2のアクティブセンサ回路122と、第2の表面の上に配置された第2のアクティブセンサ回路に電気的に結合された第2の複数の金属パッド122とを備え、第2のアクティブセンサ回路は、第1のアクティブセンサ回路に対して直交に方位付けされ、ベースに垂直であるように、第2のセンサダイが配置される。第2の表面は、第1の表面に隣接し、第1の表面の面に対して角度がつけられている。
【解決手段】センサパッケージは、ベース105と、第1のセンサダイ110が、第1のアクティブセンサ回路112および、第1のアクティブセンサ回路に電気的に結合された複数の金属パッド114とを備え、ベースに取り付けられた第2のセンサダイ120が、第1の表面128の上に配置された第2のアクティブセンサ回路122と、第2の表面の上に配置された第2のアクティブセンサ回路に電気的に結合された第2の複数の金属パッド122とを備え、第2のアクティブセンサ回路は、第1のアクティブセンサ回路に対して直交に方位付けされ、ベースに垂直であるように、第2のセンサダイが配置される。第2の表面は、第1の表面に隣接し、第1の表面の面に対して角度がつけられている。
【発明の詳細な説明】
【技術分野】
【0001】
[0001] 3次元の磁場の全ての構成要素を検出する磁気センサの必要性は、コンパスデバイスとして携帯電話および他のポータブル電子機器のそれらの用途のために増加している。物理的な寸法の制約および製造の容易さのために、今日の好ましいソリューションは、3つのセンサコンポーネントを単一の集積回路パッケージ内に組み込むことである。市場スペースの現実的なソリューションであるために、センサのかかる組み込みは、価格競争につながる。
【背景技術】
【0002】
[0002] 異方性の磁気抵抗(AMR)センサのような磁気センサ技術については、それが最も好適な商業的なオプションに達するのを防止する重大ないくつかの面がある。結果として生じるセンサの物理的な高さおよびコストは、それらの態様のうちの2つである。単一つのダイ・モノリシック3軸磁気センサ装置も、現在存在しない。この欠陥は、2つのダイソリューションを利用することによって克服された。例えば、2つの直交方向において感度が高い単一のダイが、平面内で2軸センシングを成し遂げるのに用いられる。次いで、第2のセンサのセンシング軸が、前のダイのそれに対して直交しているように、第2のセンサ・ダイは回転する。後のダイは、基板にリフローはんだ付けを介して取り付けられる。しかし、かかるソリューションは、現在まで、高価で、小さいダイ・サイズのため、製造するのが困難だった。そして、高価な複数ステップ処理が垂直方向のセンサに相互接続を作成するために必要だった。
【0003】
[0003] 上で述べられる理由のために、および他の理由のために、3軸センサ・パッケージための改良されたシステムと方法用の技術の必要性があることは、当業者が本願明細書を読むとすぐに理解される。
【発明の概要】
【課題を解決するための手段】
【0004】
[0004] 本発明の実施形態は、3軸センサ・パッケージに関する方法および装置を提供して、以下の詳細な説明を読み、研究することによって理解される。
[0005] ある実施形態では、指向性センサパッケージは、ベース(105)と、前記ベース(105)に取り付けられた第1のセンサダイ(110)であって、前記第1のセンサダイが、第1のアクティブセンサ回路(112)および、前記第1のアクティブセンサ回路(112)に電気的に結合された第1の複数の金属パッド(114)とを備える、ことを特徴とする第1のセンサダイ(110)と、前記ベース(105)に取り付けられた第2のセンサダイ(120)であって、前記第2のセンサダイが、第1の表面(126)の上に配置された第2のアクティブセンサ回路(122)と、第2の表面(128)の上に配置された第2のアクティブセンサ回路(122)に電気的に結合された第2の複数の金属パッド(124)とを備える、ことを特徴とする第2のセンサダイ(120)と、を有する。前記第2のアクティブセンサ回路(122)は、前記第1のアクティブセンサ回路(112)に対して直交に方位付けされ、ベース(105)に垂直であるように、前記第2のセンサダイ(120)が配置される。前記第2の表面(128)は、前記第1の表面(126)に隣接し、前記第1の表面(126)の面に対して角度がつけられている。
【0005】
[0006] 好ましい実施形態および図の説明からみて、本発明の実施形態は、より容易によく理解されて、更なる効果およびそれについてより直ちに明らかになる。
【図面の簡単な説明】
【0006】
【図1A】[0007] 図1Aは、本発明のある実施形態の3軸センサを例示している線図である。
【図1B】図1Bは、本発明のある実施形態の3軸センサを例示している線図である。
【図1C】図1Cは、本発明のある実施形態の3軸センサを例示している線図である。
【図1D】図1Dは、本発明のある実施形態の3軸センサを例示している線図である。
【図2】[0008] 図2は、本発明のある実施形態の垂直ダイを製造するための技術を例示している線図である。
【図3】[0009] 図3は、本発明のある実施形態の方法を例示しているフローチャートである。
【発明を実施するための形態】
【0007】
[0010] 一般的な慣習によって、さまざまな記載されている特徴は、一定の縮尺で描かれておらず、本発明に関連する特徴を強調するために描かれる。参照文字・参照番号は、図およびテキストの全体にわたって同じエレメントを意味する。
【0008】
[0011] 以下の詳細な説明において、本発明が実施されることができる特定の例示の実施形態を介して示され、本発明の一部を形成する添付の図面を参照する。これらの実施形態は、当業者が本発明を実施することができるのに充分に詳細に記載され、他の実施形態が利用されることができると理解され、その論理的で、機械的および電気的な変化は本発明の範囲内においてなされることができる。したがって、以下の詳細な説明は、限定的にとられない。
【0009】
[0012] 本発明の実施形態は、センサ・パッケージ内で非回転されるダイと90度回転されるセンサ・ダイとの両者を利用する3軸センサを提供する。そのアクティブセンサ回路(すなわちセンシング素子が製造されるダイの領域)がその上面にあり、センサの電気接続パッドと同一平面上に配置されるように、現在、実装されているような非回転ダイは製造される。回転されるダイは、2つの異なる表面を有するように製造される。第1の表面は、ダイのアクティブセンサ回路から成るように作られる。第2の表面は、第1の表面に隣接して角度がついた表面を形成するために第1の表面にエッチングによって作られる。第2の角度がついた表面は、第1の表面の上に形成されるアクティブセンサ回路と電気的相互接続を提供する金属パッドから成るように作られる。
【0010】
[0013] 非回転ダイと回転されるダイとの間の相互接続は、回転されるダイの角度がついた表面にある金属接続パッドと、非回転ダイのアクティブセンサ回路表面にある金属接続パッドとの間のワイヤボンディングを確立するために標準のワイヤボンディング技術を用いて達成される。このように、回転されるダイ上の垂直接続パッドに直接電気接続を作成する必要性は、避けられる。更に、2つのダイに関してワイヤボンディング相互接続の能力は、ダイとパッケージベースとの間のはんだ底部接触接続を提供する必要を避け、比較的より単純な製造プロセスに結果としてなる。これは、はんだ付けされた底の接触のリフロー処理から生じることがありえるセンサ・アライメント・エラーを順番に避ける。典型的なアプリケーションが面外(out-of-plane)測定のため単一軸センサを含んでいる垂直ダイを有する2軸面内(in-plane)センサを有する水平センサ・ダイを含むことが企図されるけれども、本発明の実施形態はこの種の構成に限られない。例えば、3軸センサがまた、2軸センサ(1つの軸は、面内にあり、1つは面外にある)を有する垂直ダイ、および、2軸センサと直交した方位の単一軸センサを有する水平ダイから形成されることが企図される。更に、別の実施形態で、センサが、磁気センサ(すなわち、磁場に影響されるセンサ)、慣性センサ(例えば、加速度計および/またはジャイロスコープ)、または、それらの組合せから成ることができることが企図される。
【0011】
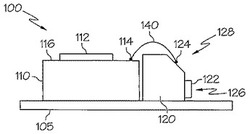
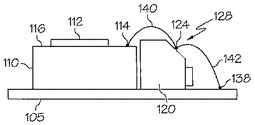
[0014] 図1Aおよび1Bは、本発明の一実施形態の3軸センサ100を例示している線図である。3軸センサ100は、アクティブセンサ回路112と電気的相互接続を提供する複数の金属パッド114と、アクティブセンサ回路112を備えた第1のセンサ・ダイ110を有する。アクティブセンサ回路112および金属パッド114は、センサ・ダイ110の単一の表面116の上に両方とも形成され、センサ100のベース105に関して同一平面上に方位付けされる。別の実施形態では、ベース105は、基板、フレーム、または、センサのために使用されるパッケージ・タイプに依存する他の集積回路であってもよい。
【0012】
[0015] 本願明細書において使われる用語として、「パッケージ」は、集積回路または多数の集積回路を収納している保護コンテナとして機能するチップ・キャリア(別名、チップ・コンテナまたはチップパッケージ)と特に証させる集積回路技術の用語である。すなわち、パッケージは、集積回路チップが、外部回路(例えばプリント回路基板)に集積回路を機械的および電気的に結合するために提供するハウジングである。電気接続は、いずれのソケットまたは表面取付けを介しても実行されることができる。このように、パッケージは、通常、金属リード線またはパッドを提供し、それは壊れやすいチップをプリント回路基板に電気的および機械的に接続するのに十分しっかりしている。
【0013】
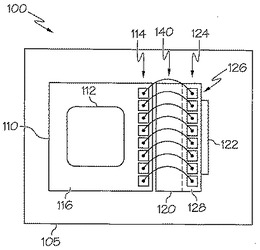
[0016] 3軸センサ100は更に、アクティブセンサ回路122を有する第2のセンサ・ダイ120と、アクティブセンサ回路122と電気的に相互接続を提供している複数の金属パッド124とを備える。センサ・ダイ120で、アクティブセンサ回路は、センサ・ダイ110の表面116に対して直交して方向付けされる第1の表面126の上に形成される。金属パッド124は、第1の表面126からエッチングされた第2の角度がつけられた表面128に形成される。図1Bに示すように、アクティブセンサ回路が、ベース105に対して垂直であり、金属パッド124がベース105から少なくとも部分的に向きがそれているように、第2のダイ120は、ベース105に方位付けされる。この方位付けによって、金属パッド114に接続するのに用いられる同じプロセスを用いて金属パッド124に接続されるようにすることができる。ある実施形態では、角度がついた表面128は、少なくとも45度で表面126の平面から角度がつけられる。
【0014】
[0017] ある実施形態では、ダイ110および120は、標準のダイアタッチメントプロセスを使用してベース105に取り付けられる。この明細書を読んだ当業者には明らかあるように、ダイ取付けは、ダイが取り付けられ、そのパッケージまたはサポート構造に固定される半導体デバイス製造中のステップである。実施形態によっては、ダイ110および120は、共晶結合である。他の実施形態では、接着剤、テープまたはエポキシ接着剤が、使われる。ある実施形態では、ダイ取り付け接着剤は、2つのダイを一緒に固着するためにダイ110とダイ120との間で使われる。ダイの直交配置のセンシング軸を保つ機械的なサポートを提供することに加えて、2つのダイの間のダイ取り付け材料を嵌入することは、パッケージ内でキャビティを除去するのに役立つ。更に、ダイ110および120に対する電気接続が、それぞれのダイの頂部に位置する金属パッド114および124によって提供されるので、ダイ110とベース105と間に電気接続を提供するためにはんだを適用する必要性必要性は避けられる。
【0015】
[0018] この明細書を読めば当業者には明らかなように、1つの重要な利点は、角度がついた表面128が、非回転のダイ110のために使用するのと同じプロセスを使用して垂直に回転されるダイ120上のワイヤボンディングの取付けを可能にすることを企図する。すなわち、両方のダイのためのワイヤボンディングは、上から直接取り付けられることができる。水平表面で、ダイ110の上に形成される接触は、ダイの上面116にある。したがって、通常のワイヤボンディング技術を使うことができる。回転されるダイ120で、ダイの上に形成される回路122は、ベース105に垂直な側に回転する。通常のワイヤボンディング技術は、この種の垂直表面にワイヤボンディングすることができない。このように、角度がついた表面128を有することは、上からワイヤボンディングすることを実行するために上から金属コンタクト124まで充分なアクセスを提供する。
【0016】
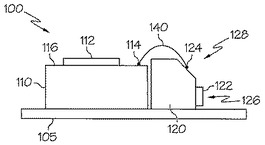
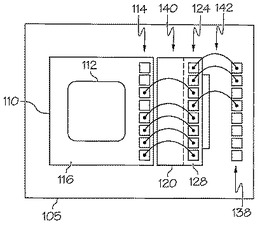
[0019] 図1Cおよび1Dにて図示したように、ダイ110と120と間のワイヤボンディング接続140を有することに加えて、一つ以上の実装において、ワイヤボンディング接続142はまた、角度がついた表面128にある金属パッド124と、ベース105に形成された金属パッド138との間に形成される。この明細書を読んだ当業者には明らかように、角度がついた表面128上の金属パッド124を有することは、ダイ110および120を相互接続するために通常のワイヤボンディング技術を使用することを容易にし、上から金属パッド124のアクセスしやすさを原因として生じるので、他の回路にダイ120を相互接続するために通常のワイヤボンディング技術を使用するのを容易にする。
【0017】
[0020] 図2は、ダイ120のような垂直ダイを製造するための本発明の一実施形態の技術を例示する。3軸センサを製造するコンテキストでは、水平ダイが、現在の製造技術を使用して処理され、この理由のために更に議論されないと推定される。
【0018】
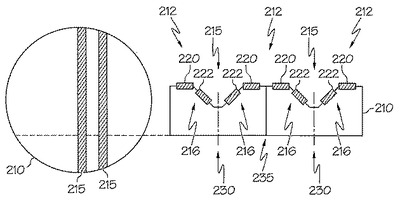
[0021] 垂直センサ・ダイは、回路要素が堆積される2つの異なる表面212および216を有するようにシリコン・ウェハ210から製造される。垂直センサ・ダイは、選択的なエッチング・プロセス(例えば、水酸化カリウム(KOH)を用いる)を適用することによって、グローブ215が、スタートウェハ材料210から形成される。エッチング・プロセスによってグローブ215内に形成される非同一平面上の角度がついた表面216で、表面は、他の回路に垂直センサを相互接続するために使われる金属パッド222を製造するためにつくられる。アクティブセンサ回路220は、ウェハ210の非グローブ水平表面212の上に形成される。水平センサを組み立てるために使われるように、アクティブセンサ回路220の堆積およびパッド222のメタライゼーションは同じウェハ製造プロセスを利用する。ウェハ210は、個々のダイを得るために通常の方法で個別化(singulated)され、現在、金属化された結合パッドを備えた斜めの表面と、水平な活性化表面とを備える。次いで、アクティブセンサ回路が垂直で、水平ダイのアクティブセンサ回路に、直交してパッケージ内に載置されることができるように、このダイは、90度回転される。ワイヤボンディング接続の取付けを容易にすることに加えて、金属結合パッド222が、垂直までの角度であるので、垂直センサパッケージの全体の高さは減少する。
【0019】
[0022] 図3は、アクティブセンサ回路に関する第1の表面、および、金属パッドを含む第2の角度がついた表面を有する垂直センサ・ダイを有する3軸センサを組み立てるための本発明の一実施形態の方法を例示しているフローチャートである。図3の方法の1つの用途において、この垂直ダイは、図1A乃至1Dにおいて例示されるような3軸センサを形成するために水平ダイと結合される。ある実施形態において、図3の方法は、図2に関して記載されているような垂直センサを得るためにウェハを処理することを提供する。
【0020】
[0023] 方法は、選択的なエッチング・プロセスを使用してウェハの溝を形成するステップ310で始まる。方法は、溝の中の角度がついた表面に金属パッドを堆積し、溝の外側表面に第1のアクティブセンサ回路を堆積するステップ320へ進み、第1のアクティブセンサ回路は金属パッドに電気的に連結する。この段階では、アクティブセンサ回路および金属パッドを堆積するための同じプロセスステップが、水平センサ・ウェハをつくるために使われることができる。ある実施形態において、アクティブセンサ回路は、単一の軸センサから成る。別の実施形態では、アクティブセンサ回路は、2軸センサから成る。
【0021】
[0024] 方法は、次いで、個々のセンサ・ダイを得るためにウェハを個別化(singulating)するステップ330へ進む。ある実施形態において、図2に示すように、第1の個別化切断230が、グローブ壁の上に形成される金属パッド222のセットの間で溝215のベースで実行され、一方、第2の個別化切断235は、ウェハ210の非グローブ部分の上に形成されるアクティブセンサ回路220の間で実行される。ウェハは、個々のセンサ・ダイを同様に提供するために水平方向において個別化される。方法は、センサ・ダイをベースに垂直に取り付けるステップ340へ進み、その結果、アクティブセンサ回路が、ベースに垂直であり、金属パッドがベースから向きがそれる。この取り付けるステップにおいて、センサ・ダイは、ベースの平面に関して垂直である方向を指すセンシング軸を有するように方位付けされる。個別化されたダイは、パッドメタライゼーションをさらすために、シリコン・ウェハの裏側および/または鋸で切られた側を使用して、パッケージの基板またはキャビティに、または、隣接したダイにダイ取り付けされる。
【0022】
[0025] 次いで、方法は、ワイヤボンディングを金属パッド上にインストールすることによって他の回路にアクティブセンサ回路を相互接続するステップ350へ進む。このステップにおいて、垂直ダイは、他のダイに、または、基板または(例えば、図1A乃至1Dに示されるような)キャビティフィンガーに結合される導線である。ある実施形態において、結果として生じる3軸センサは、銅メタライズリードフレームを使用するクワッドフラットノーリード(quad flat no lead (QF-N))パッケージタイプ、または、デュアルフラットノーリード(Dual Flat No leads (DF-N))パッケージのようなパッケージ内に密封されるが、これらに限定されない。
【0023】
[0026] このプロセスが、リフロープロセスの必要性を除去するので、それはローコストパスであり、シングル・パス・シリコン製造プロセスは、直交ボンディング可能なコンタクトパッドを作製する追加的なステップを除去する。ある実施形態において、垂直センサ・ダイが、リフロープロセスを経験する必要がないので、方法は垂直センサ・ダイを薄化するステップを更に含む。このステップは、更に更なるコスト削減に至る全体的なパッケージ寸法を減らす。
【0024】
[0027] 本発明の実施形態によって含まれるセンサを実装するのに用いる基礎をなす技術は、異方性の磁気抵抗(AMR)センサに限定されないが、面内(in-plane)方向および面外(out-of-plane)方向センサの両方を含んでいる他の技術を使用して実施されることができる。例えば、上で議論される実施形態は、(例えば異方性の磁気抵抗(AMR)、巨大磁気抵抗(GMR)およびトンネル磁気抵抗効果(TMR)センサ)を包含する)磁気抵抗(MR)センサ、磁気誘導(Magneto-Inductive(MI))センサ、ホール効果センサおよび/またはフラックスゲートセンサを使用して実行されることができる。
【0025】
[0028] 特定の実施形態を例示し、本願明細書において記載してきたけれども、同じ目的を達成するために算出されるいかなるアレンジメントも、特定の図示した実施形態と置換することができることは当業者によって認められる。本出願は、本発明のいかなる適合またはバリエーションをもカバーすることを目的とする。したがって、本発明が、特許請求の範囲およびそれの均等の範囲だけによって制限されることは明白に企図される。
【技術分野】
【0001】
[0001] 3次元の磁場の全ての構成要素を検出する磁気センサの必要性は、コンパスデバイスとして携帯電話および他のポータブル電子機器のそれらの用途のために増加している。物理的な寸法の制約および製造の容易さのために、今日の好ましいソリューションは、3つのセンサコンポーネントを単一の集積回路パッケージ内に組み込むことである。市場スペースの現実的なソリューションであるために、センサのかかる組み込みは、価格競争につながる。
【背景技術】
【0002】
[0002] 異方性の磁気抵抗(AMR)センサのような磁気センサ技術については、それが最も好適な商業的なオプションに達するのを防止する重大ないくつかの面がある。結果として生じるセンサの物理的な高さおよびコストは、それらの態様のうちの2つである。単一つのダイ・モノリシック3軸磁気センサ装置も、現在存在しない。この欠陥は、2つのダイソリューションを利用することによって克服された。例えば、2つの直交方向において感度が高い単一のダイが、平面内で2軸センシングを成し遂げるのに用いられる。次いで、第2のセンサのセンシング軸が、前のダイのそれに対して直交しているように、第2のセンサ・ダイは回転する。後のダイは、基板にリフローはんだ付けを介して取り付けられる。しかし、かかるソリューションは、現在まで、高価で、小さいダイ・サイズのため、製造するのが困難だった。そして、高価な複数ステップ処理が垂直方向のセンサに相互接続を作成するために必要だった。
【0003】
[0003] 上で述べられる理由のために、および他の理由のために、3軸センサ・パッケージための改良されたシステムと方法用の技術の必要性があることは、当業者が本願明細書を読むとすぐに理解される。
【発明の概要】
【課題を解決するための手段】
【0004】
[0004] 本発明の実施形態は、3軸センサ・パッケージに関する方法および装置を提供して、以下の詳細な説明を読み、研究することによって理解される。
[0005] ある実施形態では、指向性センサパッケージは、ベース(105)と、前記ベース(105)に取り付けられた第1のセンサダイ(110)であって、前記第1のセンサダイが、第1のアクティブセンサ回路(112)および、前記第1のアクティブセンサ回路(112)に電気的に結合された第1の複数の金属パッド(114)とを備える、ことを特徴とする第1のセンサダイ(110)と、前記ベース(105)に取り付けられた第2のセンサダイ(120)であって、前記第2のセンサダイが、第1の表面(126)の上に配置された第2のアクティブセンサ回路(122)と、第2の表面(128)の上に配置された第2のアクティブセンサ回路(122)に電気的に結合された第2の複数の金属パッド(124)とを備える、ことを特徴とする第2のセンサダイ(120)と、を有する。前記第2のアクティブセンサ回路(122)は、前記第1のアクティブセンサ回路(112)に対して直交に方位付けされ、ベース(105)に垂直であるように、前記第2のセンサダイ(120)が配置される。前記第2の表面(128)は、前記第1の表面(126)に隣接し、前記第1の表面(126)の面に対して角度がつけられている。
【0005】
[0006] 好ましい実施形態および図の説明からみて、本発明の実施形態は、より容易によく理解されて、更なる効果およびそれについてより直ちに明らかになる。
【図面の簡単な説明】
【0006】
【図1A】[0007] 図1Aは、本発明のある実施形態の3軸センサを例示している線図である。
【図1B】図1Bは、本発明のある実施形態の3軸センサを例示している線図である。
【図1C】図1Cは、本発明のある実施形態の3軸センサを例示している線図である。
【図1D】図1Dは、本発明のある実施形態の3軸センサを例示している線図である。
【図2】[0008] 図2は、本発明のある実施形態の垂直ダイを製造するための技術を例示している線図である。
【図3】[0009] 図3は、本発明のある実施形態の方法を例示しているフローチャートである。
【発明を実施するための形態】
【0007】
[0010] 一般的な慣習によって、さまざまな記載されている特徴は、一定の縮尺で描かれておらず、本発明に関連する特徴を強調するために描かれる。参照文字・参照番号は、図およびテキストの全体にわたって同じエレメントを意味する。
【0008】
[0011] 以下の詳細な説明において、本発明が実施されることができる特定の例示の実施形態を介して示され、本発明の一部を形成する添付の図面を参照する。これらの実施形態は、当業者が本発明を実施することができるのに充分に詳細に記載され、他の実施形態が利用されることができると理解され、その論理的で、機械的および電気的な変化は本発明の範囲内においてなされることができる。したがって、以下の詳細な説明は、限定的にとられない。
【0009】
[0012] 本発明の実施形態は、センサ・パッケージ内で非回転されるダイと90度回転されるセンサ・ダイとの両者を利用する3軸センサを提供する。そのアクティブセンサ回路(すなわちセンシング素子が製造されるダイの領域)がその上面にあり、センサの電気接続パッドと同一平面上に配置されるように、現在、実装されているような非回転ダイは製造される。回転されるダイは、2つの異なる表面を有するように製造される。第1の表面は、ダイのアクティブセンサ回路から成るように作られる。第2の表面は、第1の表面に隣接して角度がついた表面を形成するために第1の表面にエッチングによって作られる。第2の角度がついた表面は、第1の表面の上に形成されるアクティブセンサ回路と電気的相互接続を提供する金属パッドから成るように作られる。
【0010】
[0013] 非回転ダイと回転されるダイとの間の相互接続は、回転されるダイの角度がついた表面にある金属接続パッドと、非回転ダイのアクティブセンサ回路表面にある金属接続パッドとの間のワイヤボンディングを確立するために標準のワイヤボンディング技術を用いて達成される。このように、回転されるダイ上の垂直接続パッドに直接電気接続を作成する必要性は、避けられる。更に、2つのダイに関してワイヤボンディング相互接続の能力は、ダイとパッケージベースとの間のはんだ底部接触接続を提供する必要を避け、比較的より単純な製造プロセスに結果としてなる。これは、はんだ付けされた底の接触のリフロー処理から生じることがありえるセンサ・アライメント・エラーを順番に避ける。典型的なアプリケーションが面外(out-of-plane)測定のため単一軸センサを含んでいる垂直ダイを有する2軸面内(in-plane)センサを有する水平センサ・ダイを含むことが企図されるけれども、本発明の実施形態はこの種の構成に限られない。例えば、3軸センサがまた、2軸センサ(1つの軸は、面内にあり、1つは面外にある)を有する垂直ダイ、および、2軸センサと直交した方位の単一軸センサを有する水平ダイから形成されることが企図される。更に、別の実施形態で、センサが、磁気センサ(すなわち、磁場に影響されるセンサ)、慣性センサ(例えば、加速度計および/またはジャイロスコープ)、または、それらの組合せから成ることができることが企図される。
【0011】
[0014] 図1Aおよび1Bは、本発明の一実施形態の3軸センサ100を例示している線図である。3軸センサ100は、アクティブセンサ回路112と電気的相互接続を提供する複数の金属パッド114と、アクティブセンサ回路112を備えた第1のセンサ・ダイ110を有する。アクティブセンサ回路112および金属パッド114は、センサ・ダイ110の単一の表面116の上に両方とも形成され、センサ100のベース105に関して同一平面上に方位付けされる。別の実施形態では、ベース105は、基板、フレーム、または、センサのために使用されるパッケージ・タイプに依存する他の集積回路であってもよい。
【0012】
[0015] 本願明細書において使われる用語として、「パッケージ」は、集積回路または多数の集積回路を収納している保護コンテナとして機能するチップ・キャリア(別名、チップ・コンテナまたはチップパッケージ)と特に証させる集積回路技術の用語である。すなわち、パッケージは、集積回路チップが、外部回路(例えばプリント回路基板)に集積回路を機械的および電気的に結合するために提供するハウジングである。電気接続は、いずれのソケットまたは表面取付けを介しても実行されることができる。このように、パッケージは、通常、金属リード線またはパッドを提供し、それは壊れやすいチップをプリント回路基板に電気的および機械的に接続するのに十分しっかりしている。
【0013】
[0016] 3軸センサ100は更に、アクティブセンサ回路122を有する第2のセンサ・ダイ120と、アクティブセンサ回路122と電気的に相互接続を提供している複数の金属パッド124とを備える。センサ・ダイ120で、アクティブセンサ回路は、センサ・ダイ110の表面116に対して直交して方向付けされる第1の表面126の上に形成される。金属パッド124は、第1の表面126からエッチングされた第2の角度がつけられた表面128に形成される。図1Bに示すように、アクティブセンサ回路が、ベース105に対して垂直であり、金属パッド124がベース105から少なくとも部分的に向きがそれているように、第2のダイ120は、ベース105に方位付けされる。この方位付けによって、金属パッド114に接続するのに用いられる同じプロセスを用いて金属パッド124に接続されるようにすることができる。ある実施形態では、角度がついた表面128は、少なくとも45度で表面126の平面から角度がつけられる。
【0014】
[0017] ある実施形態では、ダイ110および120は、標準のダイアタッチメントプロセスを使用してベース105に取り付けられる。この明細書を読んだ当業者には明らかあるように、ダイ取付けは、ダイが取り付けられ、そのパッケージまたはサポート構造に固定される半導体デバイス製造中のステップである。実施形態によっては、ダイ110および120は、共晶結合である。他の実施形態では、接着剤、テープまたはエポキシ接着剤が、使われる。ある実施形態では、ダイ取り付け接着剤は、2つのダイを一緒に固着するためにダイ110とダイ120との間で使われる。ダイの直交配置のセンシング軸を保つ機械的なサポートを提供することに加えて、2つのダイの間のダイ取り付け材料を嵌入することは、パッケージ内でキャビティを除去するのに役立つ。更に、ダイ110および120に対する電気接続が、それぞれのダイの頂部に位置する金属パッド114および124によって提供されるので、ダイ110とベース105と間に電気接続を提供するためにはんだを適用する必要性必要性は避けられる。
【0015】
[0018] この明細書を読めば当業者には明らかなように、1つの重要な利点は、角度がついた表面128が、非回転のダイ110のために使用するのと同じプロセスを使用して垂直に回転されるダイ120上のワイヤボンディングの取付けを可能にすることを企図する。すなわち、両方のダイのためのワイヤボンディングは、上から直接取り付けられることができる。水平表面で、ダイ110の上に形成される接触は、ダイの上面116にある。したがって、通常のワイヤボンディング技術を使うことができる。回転されるダイ120で、ダイの上に形成される回路122は、ベース105に垂直な側に回転する。通常のワイヤボンディング技術は、この種の垂直表面にワイヤボンディングすることができない。このように、角度がついた表面128を有することは、上からワイヤボンディングすることを実行するために上から金属コンタクト124まで充分なアクセスを提供する。
【0016】
[0019] 図1Cおよび1Dにて図示したように、ダイ110と120と間のワイヤボンディング接続140を有することに加えて、一つ以上の実装において、ワイヤボンディング接続142はまた、角度がついた表面128にある金属パッド124と、ベース105に形成された金属パッド138との間に形成される。この明細書を読んだ当業者には明らかように、角度がついた表面128上の金属パッド124を有することは、ダイ110および120を相互接続するために通常のワイヤボンディング技術を使用することを容易にし、上から金属パッド124のアクセスしやすさを原因として生じるので、他の回路にダイ120を相互接続するために通常のワイヤボンディング技術を使用するのを容易にする。
【0017】
[0020] 図2は、ダイ120のような垂直ダイを製造するための本発明の一実施形態の技術を例示する。3軸センサを製造するコンテキストでは、水平ダイが、現在の製造技術を使用して処理され、この理由のために更に議論されないと推定される。
【0018】
[0021] 垂直センサ・ダイは、回路要素が堆積される2つの異なる表面212および216を有するようにシリコン・ウェハ210から製造される。垂直センサ・ダイは、選択的なエッチング・プロセス(例えば、水酸化カリウム(KOH)を用いる)を適用することによって、グローブ215が、スタートウェハ材料210から形成される。エッチング・プロセスによってグローブ215内に形成される非同一平面上の角度がついた表面216で、表面は、他の回路に垂直センサを相互接続するために使われる金属パッド222を製造するためにつくられる。アクティブセンサ回路220は、ウェハ210の非グローブ水平表面212の上に形成される。水平センサを組み立てるために使われるように、アクティブセンサ回路220の堆積およびパッド222のメタライゼーションは同じウェハ製造プロセスを利用する。ウェハ210は、個々のダイを得るために通常の方法で個別化(singulated)され、現在、金属化された結合パッドを備えた斜めの表面と、水平な活性化表面とを備える。次いで、アクティブセンサ回路が垂直で、水平ダイのアクティブセンサ回路に、直交してパッケージ内に載置されることができるように、このダイは、90度回転される。ワイヤボンディング接続の取付けを容易にすることに加えて、金属結合パッド222が、垂直までの角度であるので、垂直センサパッケージの全体の高さは減少する。
【0019】
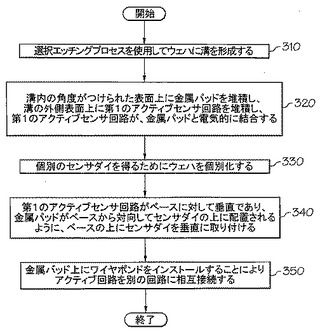
[0022] 図3は、アクティブセンサ回路に関する第1の表面、および、金属パッドを含む第2の角度がついた表面を有する垂直センサ・ダイを有する3軸センサを組み立てるための本発明の一実施形態の方法を例示しているフローチャートである。図3の方法の1つの用途において、この垂直ダイは、図1A乃至1Dにおいて例示されるような3軸センサを形成するために水平ダイと結合される。ある実施形態において、図3の方法は、図2に関して記載されているような垂直センサを得るためにウェハを処理することを提供する。
【0020】
[0023] 方法は、選択的なエッチング・プロセスを使用してウェハの溝を形成するステップ310で始まる。方法は、溝の中の角度がついた表面に金属パッドを堆積し、溝の外側表面に第1のアクティブセンサ回路を堆積するステップ320へ進み、第1のアクティブセンサ回路は金属パッドに電気的に連結する。この段階では、アクティブセンサ回路および金属パッドを堆積するための同じプロセスステップが、水平センサ・ウェハをつくるために使われることができる。ある実施形態において、アクティブセンサ回路は、単一の軸センサから成る。別の実施形態では、アクティブセンサ回路は、2軸センサから成る。
【0021】
[0024] 方法は、次いで、個々のセンサ・ダイを得るためにウェハを個別化(singulating)するステップ330へ進む。ある実施形態において、図2に示すように、第1の個別化切断230が、グローブ壁の上に形成される金属パッド222のセットの間で溝215のベースで実行され、一方、第2の個別化切断235は、ウェハ210の非グローブ部分の上に形成されるアクティブセンサ回路220の間で実行される。ウェハは、個々のセンサ・ダイを同様に提供するために水平方向において個別化される。方法は、センサ・ダイをベースに垂直に取り付けるステップ340へ進み、その結果、アクティブセンサ回路が、ベースに垂直であり、金属パッドがベースから向きがそれる。この取り付けるステップにおいて、センサ・ダイは、ベースの平面に関して垂直である方向を指すセンシング軸を有するように方位付けされる。個別化されたダイは、パッドメタライゼーションをさらすために、シリコン・ウェハの裏側および/または鋸で切られた側を使用して、パッケージの基板またはキャビティに、または、隣接したダイにダイ取り付けされる。
【0022】
[0025] 次いで、方法は、ワイヤボンディングを金属パッド上にインストールすることによって他の回路にアクティブセンサ回路を相互接続するステップ350へ進む。このステップにおいて、垂直ダイは、他のダイに、または、基板または(例えば、図1A乃至1Dに示されるような)キャビティフィンガーに結合される導線である。ある実施形態において、結果として生じる3軸センサは、銅メタライズリードフレームを使用するクワッドフラットノーリード(quad flat no lead (QF-N))パッケージタイプ、または、デュアルフラットノーリード(Dual Flat No leads (DF-N))パッケージのようなパッケージ内に密封されるが、これらに限定されない。
【0023】
[0026] このプロセスが、リフロープロセスの必要性を除去するので、それはローコストパスであり、シングル・パス・シリコン製造プロセスは、直交ボンディング可能なコンタクトパッドを作製する追加的なステップを除去する。ある実施形態において、垂直センサ・ダイが、リフロープロセスを経験する必要がないので、方法は垂直センサ・ダイを薄化するステップを更に含む。このステップは、更に更なるコスト削減に至る全体的なパッケージ寸法を減らす。
【0024】
[0027] 本発明の実施形態によって含まれるセンサを実装するのに用いる基礎をなす技術は、異方性の磁気抵抗(AMR)センサに限定されないが、面内(in-plane)方向および面外(out-of-plane)方向センサの両方を含んでいる他の技術を使用して実施されることができる。例えば、上で議論される実施形態は、(例えば異方性の磁気抵抗(AMR)、巨大磁気抵抗(GMR)およびトンネル磁気抵抗効果(TMR)センサ)を包含する)磁気抵抗(MR)センサ、磁気誘導(Magneto-Inductive(MI))センサ、ホール効果センサおよび/またはフラックスゲートセンサを使用して実行されることができる。
【0025】
[0028] 特定の実施形態を例示し、本願明細書において記載してきたけれども、同じ目的を達成するために算出されるいかなるアレンジメントも、特定の図示した実施形態と置換することができることは当業者によって認められる。本出願は、本発明のいかなる適合またはバリエーションをもカバーすることを目的とする。したがって、本発明が、特許請求の範囲およびそれの均等の範囲だけによって制限されることは明白に企図される。
【特許請求の範囲】
【請求項1】
センサパッケージが、
ベース(105)と、
前記ベース(105)に取り付けられた第1のセンサダイ(110)であって、前記第1のセンサダイが、第1のアクティブセンサ回路(112)および、前記第1のアクティブセンサ回路(112)に電気的に結合された第1の複数の金属パッド(114)とを備える、ことを特徴とする第1のセンサダイ(110)と、
前記ベース(105)に取り付けられた第2のセンサダイ(120)であって、前記第2のセンサダイが、第1の表面(126)の上に配置された第2のアクティブセンサ回路(122)と、第2の表面(128)の上に配置された第2のアクティブセンサ回路(122)に電気的に結合された第2の複数の金属パッド(124)とを備える、ことを特徴とする第2のセンサダイ(120)と、
を有し、
前記第2のアクティブセンサ回路(122)が前記第1のアクティブセンサ回路(112)に対して直交に方位付けされ、ベース(105)に垂直であるように、前記第2のセンサダイ(120)が配置され、
前記第2の表面(128)が、前記第1の表面(126)に隣接し、前記第1の表面(126)の面に対して角度がつけられている
ことを特徴とする指向性センサパッケージ。
【請求項2】
前記第1のセンサダイ(110)の第1の複数の金属パッド(114)を前記第2のセンサダイ(120)の前記第2の複数の金属パッド(124)と相互接続する1またはそれ以上のワイヤボンディング結合をさらに有する、ことを特徴とする請求項1に記載のセンサパッケージ。
【請求項3】
指向性センサを製造する方法であって、
選択エッチングプロセスを用いてウェハ(210)に溝(215)を形成するステップと、
前記溝(215)内に角度がつけられた表面(216)上に金属パッド(222)を堆積し、前記溝(215)の外側の表面上に第1のアクティブセンサ回路(220)を堆積するステップであって、前記第1のアクティブセンサ回路(220)が、前記金属パッド(222)と電気的に結合することを特徴とする、堆積するステップと、
個別のセンサダイ(120)を得るためにウェハ(120)を個別化するステップと、
前記第1のアクティブセンサ回路(220)が、ベース(105)に対して垂直であり、前記金属パッド(222)が、前記ベース(105)から対向してセンサダイ(120)上に取り付けられるように、前記ベース(105)の上にセンサダイ(120)を垂直に取り付けるステップと、
前記メタルパッド(222)の上にワイヤボンド(140,142)をインストールすることによって、別の回路にアクティブセンサ回路を相互接続するステップと
を有することを特徴とする方法。
【請求項1】
センサパッケージが、
ベース(105)と、
前記ベース(105)に取り付けられた第1のセンサダイ(110)であって、前記第1のセンサダイが、第1のアクティブセンサ回路(112)および、前記第1のアクティブセンサ回路(112)に電気的に結合された第1の複数の金属パッド(114)とを備える、ことを特徴とする第1のセンサダイ(110)と、
前記ベース(105)に取り付けられた第2のセンサダイ(120)であって、前記第2のセンサダイが、第1の表面(126)の上に配置された第2のアクティブセンサ回路(122)と、第2の表面(128)の上に配置された第2のアクティブセンサ回路(122)に電気的に結合された第2の複数の金属パッド(124)とを備える、ことを特徴とする第2のセンサダイ(120)と、
を有し、
前記第2のアクティブセンサ回路(122)が前記第1のアクティブセンサ回路(112)に対して直交に方位付けされ、ベース(105)に垂直であるように、前記第2のセンサダイ(120)が配置され、
前記第2の表面(128)が、前記第1の表面(126)に隣接し、前記第1の表面(126)の面に対して角度がつけられている
ことを特徴とする指向性センサパッケージ。
【請求項2】
前記第1のセンサダイ(110)の第1の複数の金属パッド(114)を前記第2のセンサダイ(120)の前記第2の複数の金属パッド(124)と相互接続する1またはそれ以上のワイヤボンディング結合をさらに有する、ことを特徴とする請求項1に記載のセンサパッケージ。
【請求項3】
指向性センサを製造する方法であって、
選択エッチングプロセスを用いてウェハ(210)に溝(215)を形成するステップと、
前記溝(215)内に角度がつけられた表面(216)上に金属パッド(222)を堆積し、前記溝(215)の外側の表面上に第1のアクティブセンサ回路(220)を堆積するステップであって、前記第1のアクティブセンサ回路(220)が、前記金属パッド(222)と電気的に結合することを特徴とする、堆積するステップと、
個別のセンサダイ(120)を得るためにウェハ(120)を個別化するステップと、
前記第1のアクティブセンサ回路(220)が、ベース(105)に対して垂直であり、前記金属パッド(222)が、前記ベース(105)から対向してセンサダイ(120)上に取り付けられるように、前記ベース(105)の上にセンサダイ(120)を垂直に取り付けるステップと、
前記メタルパッド(222)の上にワイヤボンド(140,142)をインストールすることによって、別の回路にアクティブセンサ回路を相互接続するステップと
を有することを特徴とする方法。
【図1A】


【図1B】
【図1C】
【図1D】
【図2】
【図3】
【図1B】
【図1C】
【図1D】
【図2】
【図3】
【公開番号】特開2012−237751(P2012−237751A)
【公開日】平成24年12月6日(2012.12.6)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−101196(P2012−101196)
【出願日】平成24年4月26日(2012.4.26)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
【公開日】平成24年12月6日(2012.12.6)
【国際特許分類】
【出願番号】特願2012−101196(P2012−101196)
【出願日】平成24年4月26日(2012.4.26)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
[ Back to top ]