
4ローター型ヘリコプターの構造と姿勢制御方法
【課題】ローターの軸間距離をローター直径より小さくでき、姿勢変化が穏やかな4ローター型ヘリコプターの構造の構築と外力による機体傾斜の制御時に制御軸以外の軸に影響を与えない姿勢制御方法の構築。
【解決手段】略長方形の機体の4角に原動機を配置してドライブシャフトを設け、その長さを少なくとも機体の縦軸方向は段違いにして、縦隣と横隣のローターとは反転回動方向とする。機体の傾斜の内、ピンチング成分に対しては、両隣のローターの中心点を結ぶ線がピッチング軸に平行であるペアのローターのうち、少なくとも一方のペアのローターの回動数でピッチング傾斜を制御し、回動差でローリング軸を制御する。ローリング成分に対しては、両隣のローターの中心点を結ぶ線がローリング軸に平行であるペアのローターのうち、少なくとも一方のペアのローターの回動数でローリング傾斜を制御し、回動差でピッチング軸を制御する。
【解決手段】略長方形の機体の4角に原動機を配置してドライブシャフトを設け、その長さを少なくとも機体の縦軸方向は段違いにして、縦隣と横隣のローターとは反転回動方向とする。機体の傾斜の内、ピンチング成分に対しては、両隣のローターの中心点を結ぶ線がピッチング軸に平行であるペアのローターのうち、少なくとも一方のペアのローターの回動数でピッチング傾斜を制御し、回動差でローリング軸を制御する。ローリング成分に対しては、両隣のローターの中心点を結ぶ線がローリング軸に平行であるペアのローターのうち、少なくとも一方のペアのローターの回動数でローリング傾斜を制御し、回動差でピッチング軸を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ヘリコプターの構造と姿勢制御方法に関するものである。
【背景技術】
【0002】
特に4ローター型ヘリコプターは全動力を揚力として使える利点がある。
【0003】
4ローター型ヘリコプターはヘリコプターの初期において多数存在した。
【0004】
しかし、従来の技術で4個のローターを設けると、ローターの軸間距離はローター直径より大きくしなければならず、機体の小型化には限界がある。また原動機とローターの間隔が充分とれないので姿勢変化が激しい。さらに機体が外力を受けて傾斜した場合、その傾斜の軸線とは直交軸となる軸上に存在するローターを制御しても、各ローター中心と各軸中心軸とに誤差があれば制御軸以外の他軸にもモーメントを与える問題があった。
米国特許 2514822
米国特許 3053480
特許公報 昭53−6435
特許公報 平3−24384
【発明の開示】
【発明が解決しようとする課題】
【0005】
ローターの軸間距離をローター直径より小さくでき、姿勢変化が穏やかな4ローター型ヘリコプターの構造の構築と外力による機体傾斜の制御時に制御軸以外の軸に影響を与えない姿勢制御方法の構築。
【課題を解決するための手段】
【0006】
本発明は略長方形の機体の4角に原動機を配置(請求項1)してドライブシャフトを設け、その長さを少なくとも機体の縦軸方向は段違い(請求項2)にして、各ローターの回動方向を斜交いのローターとのみ同一回動方向とし、縦隣と横隣のローターとは反転回動方向とする(請求項3)ことと機体の傾斜の内、ピッチング成分に対しては、両隣のローターの中心点を結ぶ線がピッチング軸に平行であるペアのローターのうち、少なくとも一方のペアのローターの回動数でピッチング傾斜を制御し、前記ペアのローターの回動差でローリング軸を制御し、機体の傾斜の内、ローリング成分に対しては、両隣のローターの中心点を結ぶ線がローリング軸に平行であるペアのローターのうち、少なくとも一方のペアのローターの回動数でローリング傾斜を制御し、前記ペアのローターの回動差でピッチング軸を制御する(請求項4)姿勢制御方法で課題を達成する。
【発明の効果】
【0007】
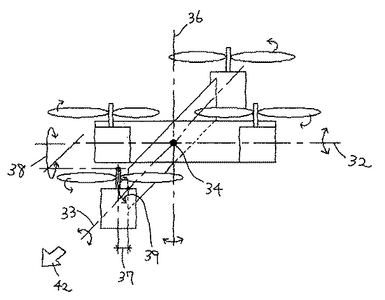
請求項1の発明の構造効果として、各ローターの中心点は機体の重心点を通るピッチング軸とローリング軸から離れているので、制御したい軸を制御できるローターは制御軸に平行になるペアのローターとなり、前記ペアのローターは制御軸に直交する軸に対するモーメントを互いに打ち消す位置関係になる(図4)ことが明らかで、従来技術のように各ローター中心と各軸中心軸とに誤差(図3)があれば制御軸以外の他軸にもモーメントを与える問題が解消できる。請求項2の発明では請求項1の効果の他に機体の縦軸方向のローターの高さが異なるため機体の縦軸方向の各ローターの軸間距離はローター半径近くまで狭めることができ、機体の縦の幅を狭くできる。その結果機体の前面投影面積は小さくなり、空力面で従来のものより有利である。またドライブシャフトの長さでローターの高さを変えているため、前記ドライブシャフトを長くするだけで、機体の振り子運動の周期は長くなる。それにより機体の単位時間当たりの姿勢の角度変化が穏やかとなり、機体操作に時間的余裕ができる。請求項3の発明では、請求項1、2の効果の他に縦隣または横隣のローターは常に反転回動となり、前記反転回動するローターとのみ適宜ローターペアを組むことになるので、前記ローターペアの回動数が上下しても回動差がない限り、反動モーメントは常に相殺されるのでヨー軸への影響も極力抑えることができる。請求項4の姿勢制御方法は、機体が外力を受けて傾斜した場合、傾斜のピッチング成分に対しては、両隣のローターの中心点を結ぶ線がピッチング軸に平行であるペアのローターのうち、機体の傾斜の下側となるペアのローターの回動数を同時に上昇させることでピッチング傾斜を制御し、前記ペアのローターの回動差を一定にすることでローリング軸に対する影響を排除できる。またローリング成分に対しては、両隣のローターの中心点を結ぶ線がローリング軸に平行であるペアのローターのうち、機体の傾斜の下側となるペアのローターの回動数を同時に上昇させるだけでローリング傾斜を制御し、前記ペアのローターの回動差を一定にすることでピッチング軸に対する影響を排除できる。つまり制御軸に平行になるペアのローターで姿勢制御するため、制御軸に直交する軸に対するモーメントを互いに打ち消しながら、目的である制御したい軸だけを制御できる。従来技術ではピッチング軸を制御しようとするとピッチング軸とは直交軸となるローリング軸上に存在するローターを制御するが、前記ローター中心とローリング軸中心軸とに誤差(図3)があればローリング軸にもモーメントを与える問題があった。以上のように本発明では固定ピッチであっても縦隣または横隣のローターと適宜ローターペアを組替えることで適切な姿勢制御ができ、ピッチング軸中心軸上またはローリング軸中心軸上に各ローター中心を誤差なく設ける必要がない。
【発明を実施するための最良の形態】
【0008】
本発明は略長方形の機体の4角に原動機を配置してドライブシャフトを設け、その長さを機体の縦軸方向のみ段違いにして、各ローターの回動方向を斜交いのローターとのみ同一回動方向とし、縦隣と横隣のローターとは反転回動方向とし、姿勢制御方法は機体の傾斜の内、ピッチング成分に対しては、両隣のローターの中心点を結ぶ線がピッチング軸に平行であるペアのローターのうち、少なくとも一方のペアのローターの回動数でピッチング傾斜を制御し、前記ペアのローターの回動差でローリング軸を制御し、機体の傾斜の内、ローリング成分に対しては、両隣のローターの中心点を結ぶ線がローリング軸に平行であるペアのローターのうち、少なくとも一方のペアのローターの回動数でローリング傾斜を制御し、前記ペアのローターの回動差でピッチング軸を制御する。
【実施例】
【0009】
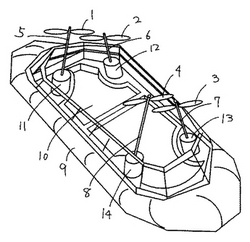
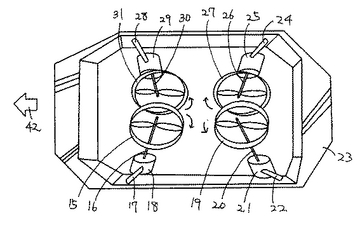
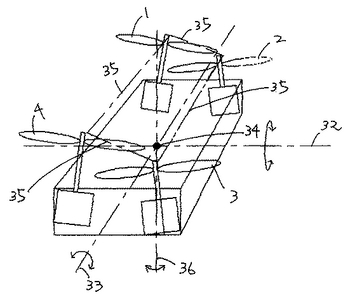
図1は、本発明の実施例であってドライブシャフト5と6同じく7と8の長さを変えることで、縦軸方向のローターは段違いになる。原動機の機体への取り付け角度で、ローターを内向きに傾斜させている。また一般的に航空機は機体の重心位置と推力、揚力の発生点との位置関係によって機体の安定性や姿勢制御方法に与える影響が大きく、本発明は前記推力、揚力の発生点であるローターの配置に関する発明であるため、原動機の種類は外燃機関、内燃機関、電気モーター、液圧モーターと限定はされない。図2も本発明の実施例であって原動機18、21、25,29にはパイプ体17,22,24,28を介して機体23に取り付ける。前記パイプ体は円周方向に回動できるので、各ローターの取り付け角度を調整できる。またローター31、19は同一の方向に回動し、他のローターは前記ローターとは反転方向に回動し、反転回動するローターがペアとなっているため、水平飛行時に各ローターに転移揚力が発生して、ノーズアップになってもピッチング傾斜を制御することで従来技術より機体バランスが取りやすい。
図5は請求項5の発明であり、平面部40と斜面部41からなり、ピッチング軸に平行になるペアのローターのうち一方のペアのローター1,2だけ回動数を上昇させると、機体が流れるが機体を略45度の斜面部41で抑えておいて、ピッチング軸に平行になるペアのローターのうち他方のペアのローター4,3の回動数を後から上昇(図6)させて、機体全部を離陸させる(図7)ことができる。つまり離陸時に従来のヘリポートでは流れる機体を抑える方法がないので、4つのローターを同時に制御しなければならないが、本発明のヘリポートでは2つのローターを同時に制御するだけで済み、機体操作が簡易になる。また請求項6のヘリポートで、塩化ビニール樹脂などを使えば柔軟性があるので、ピッチング軸に平行になるペアのローターのうち一方のペアのローター1,2だけ回動数を上昇させると、機体が流れ、機体を略45度の斜面部41で押さえるが、斜面部41に柔軟性があるので、機体の流れる強さに応じて斜面部41の角度が変位する。それにより斜面部41が元の角度に戻ろうとする反発力が働き、斜面部41に接触する機体側を持ち上げる効果がある。また斜面部41は平面部40より高い高度にまで地面効果が及ぶことも期待できる。
【産業上の利用可能性】
【0010】
本発明は4個のローターをそれぞれ組み合わせて姿勢制御を行なうため、揚力に余裕のない模型ヘリコプターなどには好適である。
【図面の簡単な説明】
【0011】
【図1】は本発明の斜視図である。
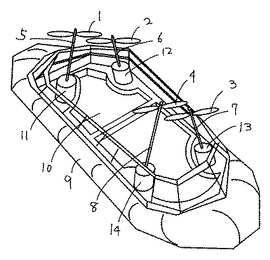
【図2】は本発明の平面一部断面図である。
【図3】は従来の4ローター型ヘリコプターである。
【図4】は本発明の模式図である。
【図5】本発明のヘリポートの利用図である。
【図6】は本発明のヘリポートの利用図である。
【図7】は本発明のヘリポートの利用図である。
【符号の説明】
【0012】
1 ローター 2 ローター
3 ローター 4 ローター
5 ドライブシャフト 6 ドライブシャフト
7 ドライブシャフト 8 ドライブシャフト
9 機体 10 空気穴
11 原動機 12 原動機
13 原動機 14 原動機
15 リング付きローター 16 ドライブシャフト
17 パイプ体 18 原動機
19 リング付きローター 20 ドライブシャフト
21 原動機 22 パイプ体
23 機体 24 パイプ体
25 原動機 26 ドライブシャフト
27 リング付きローター 28 パイプ体
29 原動機 30 ドライブシャフト
31 リング付きローター 32 ピッチング軸(縦軸)
33 ローリング軸(横軸) 34 重心点
35 両隣のローターの中心点を結ぶ線 36 ヨー軸
37 誤差 38 ピッチングモーメント(制御軸)
39 ローリングモーメント(当該、原動機では制御外軸)
40 平面部 41 斜面部
42 進行方向
【技術分野】
【0001】
本発明は、ヘリコプターの構造と姿勢制御方法に関するものである。
【背景技術】
【0002】
特に4ローター型ヘリコプターは全動力を揚力として使える利点がある。
【0003】
4ローター型ヘリコプターはヘリコプターの初期において多数存在した。
【0004】
しかし、従来の技術で4個のローターを設けると、ローターの軸間距離はローター直径より大きくしなければならず、機体の小型化には限界がある。また原動機とローターの間隔が充分とれないので姿勢変化が激しい。さらに機体が外力を受けて傾斜した場合、その傾斜の軸線とは直交軸となる軸上に存在するローターを制御しても、各ローター中心と各軸中心軸とに誤差があれば制御軸以外の他軸にもモーメントを与える問題があった。
米国特許 2514822
米国特許 3053480
特許公報 昭53−6435
特許公報 平3−24384
【発明の開示】
【発明が解決しようとする課題】
【0005】
ローターの軸間距離をローター直径より小さくでき、姿勢変化が穏やかな4ローター型ヘリコプターの構造の構築と外力による機体傾斜の制御時に制御軸以外の軸に影響を与えない姿勢制御方法の構築。
【課題を解決するための手段】
【0006】
本発明は略長方形の機体の4角に原動機を配置(請求項1)してドライブシャフトを設け、その長さを少なくとも機体の縦軸方向は段違い(請求項2)にして、各ローターの回動方向を斜交いのローターとのみ同一回動方向とし、縦隣と横隣のローターとは反転回動方向とする(請求項3)ことと機体の傾斜の内、ピッチング成分に対しては、両隣のローターの中心点を結ぶ線がピッチング軸に平行であるペアのローターのうち、少なくとも一方のペアのローターの回動数でピッチング傾斜を制御し、前記ペアのローターの回動差でローリング軸を制御し、機体の傾斜の内、ローリング成分に対しては、両隣のローターの中心点を結ぶ線がローリング軸に平行であるペアのローターのうち、少なくとも一方のペアのローターの回動数でローリング傾斜を制御し、前記ペアのローターの回動差でピッチング軸を制御する(請求項4)姿勢制御方法で課題を達成する。
【発明の効果】
【0007】
請求項1の発明の構造効果として、各ローターの中心点は機体の重心点を通るピッチング軸とローリング軸から離れているので、制御したい軸を制御できるローターは制御軸に平行になるペアのローターとなり、前記ペアのローターは制御軸に直交する軸に対するモーメントを互いに打ち消す位置関係になる(図4)ことが明らかで、従来技術のように各ローター中心と各軸中心軸とに誤差(図3)があれば制御軸以外の他軸にもモーメントを与える問題が解消できる。請求項2の発明では請求項1の効果の他に機体の縦軸方向のローターの高さが異なるため機体の縦軸方向の各ローターの軸間距離はローター半径近くまで狭めることができ、機体の縦の幅を狭くできる。その結果機体の前面投影面積は小さくなり、空力面で従来のものより有利である。またドライブシャフトの長さでローターの高さを変えているため、前記ドライブシャフトを長くするだけで、機体の振り子運動の周期は長くなる。それにより機体の単位時間当たりの姿勢の角度変化が穏やかとなり、機体操作に時間的余裕ができる。請求項3の発明では、請求項1、2の効果の他に縦隣または横隣のローターは常に反転回動となり、前記反転回動するローターとのみ適宜ローターペアを組むことになるので、前記ローターペアの回動数が上下しても回動差がない限り、反動モーメントは常に相殺されるのでヨー軸への影響も極力抑えることができる。請求項4の姿勢制御方法は、機体が外力を受けて傾斜した場合、傾斜のピッチング成分に対しては、両隣のローターの中心点を結ぶ線がピッチング軸に平行であるペアのローターのうち、機体の傾斜の下側となるペアのローターの回動数を同時に上昇させることでピッチング傾斜を制御し、前記ペアのローターの回動差を一定にすることでローリング軸に対する影響を排除できる。またローリング成分に対しては、両隣のローターの中心点を結ぶ線がローリング軸に平行であるペアのローターのうち、機体の傾斜の下側となるペアのローターの回動数を同時に上昇させるだけでローリング傾斜を制御し、前記ペアのローターの回動差を一定にすることでピッチング軸に対する影響を排除できる。つまり制御軸に平行になるペアのローターで姿勢制御するため、制御軸に直交する軸に対するモーメントを互いに打ち消しながら、目的である制御したい軸だけを制御できる。従来技術ではピッチング軸を制御しようとするとピッチング軸とは直交軸となるローリング軸上に存在するローターを制御するが、前記ローター中心とローリング軸中心軸とに誤差(図3)があればローリング軸にもモーメントを与える問題があった。以上のように本発明では固定ピッチであっても縦隣または横隣のローターと適宜ローターペアを組替えることで適切な姿勢制御ができ、ピッチング軸中心軸上またはローリング軸中心軸上に各ローター中心を誤差なく設ける必要がない。
【発明を実施するための最良の形態】
【0008】
本発明は略長方形の機体の4角に原動機を配置してドライブシャフトを設け、その長さを機体の縦軸方向のみ段違いにして、各ローターの回動方向を斜交いのローターとのみ同一回動方向とし、縦隣と横隣のローターとは反転回動方向とし、姿勢制御方法は機体の傾斜の内、ピッチング成分に対しては、両隣のローターの中心点を結ぶ線がピッチング軸に平行であるペアのローターのうち、少なくとも一方のペアのローターの回動数でピッチング傾斜を制御し、前記ペアのローターの回動差でローリング軸を制御し、機体の傾斜の内、ローリング成分に対しては、両隣のローターの中心点を結ぶ線がローリング軸に平行であるペアのローターのうち、少なくとも一方のペアのローターの回動数でローリング傾斜を制御し、前記ペアのローターの回動差でピッチング軸を制御する。
【実施例】
【0009】
図1は、本発明の実施例であってドライブシャフト5と6同じく7と8の長さを変えることで、縦軸方向のローターは段違いになる。原動機の機体への取り付け角度で、ローターを内向きに傾斜させている。また一般的に航空機は機体の重心位置と推力、揚力の発生点との位置関係によって機体の安定性や姿勢制御方法に与える影響が大きく、本発明は前記推力、揚力の発生点であるローターの配置に関する発明であるため、原動機の種類は外燃機関、内燃機関、電気モーター、液圧モーターと限定はされない。図2も本発明の実施例であって原動機18、21、25,29にはパイプ体17,22,24,28を介して機体23に取り付ける。前記パイプ体は円周方向に回動できるので、各ローターの取り付け角度を調整できる。またローター31、19は同一の方向に回動し、他のローターは前記ローターとは反転方向に回動し、反転回動するローターがペアとなっているため、水平飛行時に各ローターに転移揚力が発生して、ノーズアップになってもピッチング傾斜を制御することで従来技術より機体バランスが取りやすい。
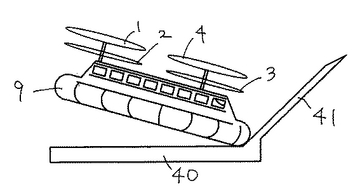
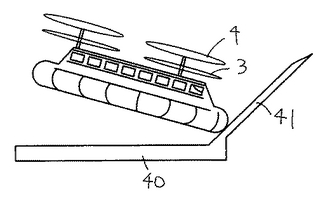
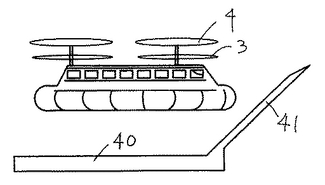
図5は請求項5の発明であり、平面部40と斜面部41からなり、ピッチング軸に平行になるペアのローターのうち一方のペアのローター1,2だけ回動数を上昇させると、機体が流れるが機体を略45度の斜面部41で抑えておいて、ピッチング軸に平行になるペアのローターのうち他方のペアのローター4,3の回動数を後から上昇(図6)させて、機体全部を離陸させる(図7)ことができる。つまり離陸時に従来のヘリポートでは流れる機体を抑える方法がないので、4つのローターを同時に制御しなければならないが、本発明のヘリポートでは2つのローターを同時に制御するだけで済み、機体操作が簡易になる。また請求項6のヘリポートで、塩化ビニール樹脂などを使えば柔軟性があるので、ピッチング軸に平行になるペアのローターのうち一方のペアのローター1,2だけ回動数を上昇させると、機体が流れ、機体を略45度の斜面部41で押さえるが、斜面部41に柔軟性があるので、機体の流れる強さに応じて斜面部41の角度が変位する。それにより斜面部41が元の角度に戻ろうとする反発力が働き、斜面部41に接触する機体側を持ち上げる効果がある。また斜面部41は平面部40より高い高度にまで地面効果が及ぶことも期待できる。
【産業上の利用可能性】
【0010】
本発明は4個のローターをそれぞれ組み合わせて姿勢制御を行なうため、揚力に余裕のない模型ヘリコプターなどには好適である。
【図面の簡単な説明】
【0011】
【図1】は本発明の斜視図である。
【図2】は本発明の平面一部断面図である。
【図3】は従来の4ローター型ヘリコプターである。
【図4】は本発明の模式図である。
【図5】本発明のヘリポートの利用図である。
【図6】は本発明のヘリポートの利用図である。
【図7】は本発明のヘリポートの利用図である。
【符号の説明】
【0012】
1 ローター 2 ローター
3 ローター 4 ローター
5 ドライブシャフト 6 ドライブシャフト
7 ドライブシャフト 8 ドライブシャフト
9 機体 10 空気穴
11 原動機 12 原動機
13 原動機 14 原動機
15 リング付きローター 16 ドライブシャフト
17 パイプ体 18 原動機
19 リング付きローター 20 ドライブシャフト
21 原動機 22 パイプ体
23 機体 24 パイプ体
25 原動機 26 ドライブシャフト
27 リング付きローター 28 パイプ体
29 原動機 30 ドライブシャフト
31 リング付きローター 32 ピッチング軸(縦軸)
33 ローリング軸(横軸) 34 重心点
35 両隣のローターの中心点を結ぶ線 36 ヨー軸
37 誤差 38 ピッチングモーメント(制御軸)
39 ローリングモーメント(当該、原動機では制御外軸)
40 平面部 41 斜面部
42 進行方向
【特許請求の範囲】
【請求項1】
略長方形の機体の4角に原動機を配置したことを特徴とする4ローター型ヘリコプター。
【請求項2】
略長方形の機体の4角に原動機を配置してドライブシャフトを設け、前記ドライブシャフトの長さを少なくとも機体の縦軸方向は段違いにしたことを特徴とする4ローター型ヘリコプター。
【請求項3】
略長方形の機体の4角に原動機を配置してドライブシャフトを設け、前記ドライブシャフトの長さを少なくとも機体の縦軸方向は段違いにして、各ローターの回動方向を斜交いのローターとのみ同一回動方向とし、縦隣と横隣のローターとは反転回動方向となることを特徴とする4ローター型ヘリコプター。
【請求項4】
機体の傾斜の内、ピッチング成分に対しては、両隣のローターの中心点を結ぶ線がピッチング軸に平行であるペアのローターのうち、少なくとも一方のペアのローターの回動数でピッチング傾斜を制御し、前記ペアのローターの回動差でローリング軸を制御することを特徴とし、機体の傾斜の内、ローリング成分に対しては、両隣のローターの中心点を結ぶ線がローリング軸に平行であるペアのローターのうち、少なくとも−方のペアのローターの回動数でローリング傾斜を制御し、前記ペアのローターの回動差でピッチング軸を制御する姿勢制御方法であることを特徴とした請求項1または請求項2または請求項3の4ローター型ヘリコプター。
【請求項5】
平面部と斜面部を有することを特徴としたヘリポート。
【請求項6】
平面部と斜面部は共にプラスチック系樹脂で作られたことを特徴とする請求項5のヘリポート。
【請求項1】
略長方形の機体の4角に原動機を配置したことを特徴とする4ローター型ヘリコプター。
【請求項2】
略長方形の機体の4角に原動機を配置してドライブシャフトを設け、前記ドライブシャフトの長さを少なくとも機体の縦軸方向は段違いにしたことを特徴とする4ローター型ヘリコプター。
【請求項3】
略長方形の機体の4角に原動機を配置してドライブシャフトを設け、前記ドライブシャフトの長さを少なくとも機体の縦軸方向は段違いにして、各ローターの回動方向を斜交いのローターとのみ同一回動方向とし、縦隣と横隣のローターとは反転回動方向となることを特徴とする4ローター型ヘリコプター。
【請求項4】
機体の傾斜の内、ピッチング成分に対しては、両隣のローターの中心点を結ぶ線がピッチング軸に平行であるペアのローターのうち、少なくとも一方のペアのローターの回動数でピッチング傾斜を制御し、前記ペアのローターの回動差でローリング軸を制御することを特徴とし、機体の傾斜の内、ローリング成分に対しては、両隣のローターの中心点を結ぶ線がローリング軸に平行であるペアのローターのうち、少なくとも−方のペアのローターの回動数でローリング傾斜を制御し、前記ペアのローターの回動差でピッチング軸を制御する姿勢制御方法であることを特徴とした請求項1または請求項2または請求項3の4ローター型ヘリコプター。
【請求項5】
平面部と斜面部を有することを特徴としたヘリポート。
【請求項6】
平面部と斜面部は共にプラスチック系樹脂で作られたことを特徴とする請求項5のヘリポート。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2006−89010(P2006−89010A)
【公開日】平成18年4月6日(2006.4.6)
【国際特許分類】
【出願番号】特願2004−310212(P2004−310212)
【出願日】平成16年9月27日(2004.9.27)
【出願人】(393028140)
【公開日】平成18年4月6日(2006.4.6)
【国際特許分類】
【出願日】平成16年9月27日(2004.9.27)
【出願人】(393028140)
[ Back to top ]