
ADS−B送信の受信からの状態ベクトル、タイミングおよびナビゲーション品質値の決定
【課題】空中、海上または地上ベースのプラットフォームにおけるモバイルデバイスの位置決定方法の提供。
【解決手段】モバイルデバイスにおいて複数のメッセージを複数のモバイル基準デバイスから受信することであって、各メッセージは、基準時間に対して既知のタイミングを有している複数のMSO時刻のうちの1つで始まり、各メッセージを送信するモバイル基準デバイスに対する位置情報と、各メッセージの送信が開始されるMSO時刻を示すMSO値とを含むことと、モバイルデバイスにおいて受信される各メッセージの受信の時間を決定することと、モバイルデバイスにおいて受信される各メッセージの送信の時間を決定するためにMSO値を用いることと、各メッセージの送信の時間および受信の時間と、モバイル基準デバイスに対する位置情報とに基づいてモバイルデバイスの位置を多辺測量により決定することとを含む、モバイルデバイスの位置を決定する方法。
【解決手段】モバイルデバイスにおいて複数のメッセージを複数のモバイル基準デバイスから受信することであって、各メッセージは、基準時間に対して既知のタイミングを有している複数のMSO時刻のうちの1つで始まり、各メッセージを送信するモバイル基準デバイスに対する位置情報と、各メッセージの送信が開始されるMSO時刻を示すMSO値とを含むことと、モバイルデバイスにおいて受信される各メッセージの受信の時間を決定することと、モバイルデバイスにおいて受信される各メッセージの送信の時間を決定するためにMSO値を用いることと、各メッセージの送信の時間および受信の時間と、モバイル基準デバイスに対する位置情報とに基づいてモバイルデバイスの位置を多辺測量により決定することとを含む、モバイルデバイスの位置を決定する方法。
【発明の詳細な説明】
【背景技術】
【0001】
(背景)
米国のNAVSTAR全地球測位システム(GPS)、欧州のガリレオ測位システムおよびロシアのGLONASSシステムのような全地球的航法衛星システム(GNSS)は、受信器機器の地理的な位置を正確に決定するため、および信頼できる精密な基準に従うタイミングを確立するために、ますます頼られている。二次監視レーダー(SSR)、VHF全方向式レンジ(VOR)および距離測定装置(DME)に頼るような従来アプローチは、役目を減らしているが、航空管制システムのある局面は、よりGPSナビゲーションに頼るように発展している。例えば、放送型自動従属監視(ADS−B)の監視に備えた航空機は、その位置を決定するために主にGPS信号に頼り、次いで、自身の位置を他の航空機および地上ラジオ局に報告する。GPSシステムに頼る別の例は、金融産業にみられ、そこでは、機関が金融取引に要求される精密なタイミングを維持するためにGPSシステムに頼っている。モバイル電話、ポータブルコンピュータおよびナビゲーションデバイスのような、GPSを備えた幅広い消費者製品がいたるところで見られるようになり、タイミングおよびナビゲーションのために、もっぱらGPSシステム、またはそれに匹敵するGNSS衛星ネットワークに頼るようになっている。
【0002】
しかし、種々の理由により、GPSサービスは完全に信頼できるわけではない。障害物(例えば、山岳地帯および「都市峡谷」)によって囲まれた場所は、GPS信号を断続的にしか受信しないか、または全く受信しないことがある。GPS衛星機器は、停電、故障または損傷を潜在的に受けることがあり得、大気の状態は、信号受信に潜在的に影響し得る。航空機産業においては、ADS−B監視システムは、精密、効率的および継続的なナビゲーションおよび監視をGPSに頼っている。GPSまたは他の衛星システムへ頼ることは、十分なバックアップを有していないGNSS受信器およびADS−B監視システムに対して共通の方式の故障になり得る。地上ベースのレーダーシステムは、監視を提供し得るが、現状のままでは、航空機にナビゲーションは提供できない。VOR/DMEのような他の航空位置導出デバイスは、信頼でき、効率的な航空機分離をサポートするために十分な精度およびカバレッジを有していない。
【発明の概要】
【発明が解決しようとする課題】
【0003】
したがって、幅広い地理的範囲にわたり精密なナビゲーションおよびタイミングを提供でき、エンドユーザーへのGPSと継ぎ目ない、信頼できるGPSに代わるものを有することが望ましい。
【課題を解決するための手段】
【0004】
(概要)
モバイルデバイスにおいて、複数のメッセージを複数のモバイル基準デバイスのそれぞれから受信することを含む空中、海上または地上ベースのプラットフォームにおけるデバイスのようなモバイルデバイスの位置を決定する技術が本明細書において記載される。放送されるメッセージの各々は、基準時間に対して既知のタイミングを有している複数のメッセージ開始適用(MSO)時刻のうちの1つで始まる。メッセージの各々は、メッセージを送信するモバイル基準デバイスに対する位置情報とメッセージの送信が開始されるMSO時刻を示すMSO値とを含む。モバイルデバイスは、メッセージの各々の受信の時間を決定し、モバイルデバイスが各メッセージの伝搬時間を計算できるように、または同等にモバイル基準デイバスの各々の距離を計算できるように、メッセージの各々の送信の時
間を決定するために、受信されたMSO値を用いる。次いで、モバイルデバイスに対するナビゲーションソリューションを決定するために、モバイルデバイスによって、モバイル基準デバイスに対する位置情報および信号伝搬時間(または距離)を用いて、多辺測量が行われ得る。
【0005】
一実装に従うと、メッセージは、空中の航空機または他のモバイルプラットフォームからの放送型自動従属監視(ADS−B)である。メッセージは、送信航空機に対する位置情報(例えば、緯度、経度および高度)を含み、メッセージの送信が始まり、そこから、送信の時間が受信モバイルデバイスにおいて決定され得るMSOを示すフィールドを含む。例えば、そのような時間スロットされたADS−Bメッセージは、ユニバーサルアクセストランシーバー(UAT)プロトコル内で採用される。
【0006】
モバイルデバイスの位置を決定するための他のアプローチは、モバイルデバイスにおいて、複数のADS−Bメッセージを複数の空中の航空機または他のモバイルプラットフォームのそれぞれから受信することに関する。モバイルデバイスは、受信されたADS−Bメッセージの各々の受信の時間を決定し、ADS−Bメッセージの各々の送信の時間をADS−Bメッセージの各々のフィールド、または後続のメッセージそれぞれのフィールド内に含まれる情報から決定する。(改変または再利用された1090 Extended
Squitterのような)ADS−Bメッセージは、送信航空機に対する位置情報を含み得、次いで、モバイルデバイスの位置は、多辺測量を介して、ADS−Bメッセージの送信の時間および受信の時間と送信航空機の位置とに基づき、決定され得る。
【0007】
上述のメッセージは、モバイルまたは固定プラットフォームのローカルクロックを基準デバイスのタイミングに同期させるためにも用いられ得る。1つのアプローチに従うと、空中の航空機から送信されたADS−Bメッセージは、ローカルクロックと共に配置されたSBS受信器において受信される。受信器は、ADS−Bメッセージの受信の時間を決定し、ADS−Bメッセージの送信の時間は、ADS−Bメッセージに含まれる情報、または後続のメッセージに含まれる情報から決定される。次いで、ローカルクロックがADS−Bメッセージの送信の時間および受信の時間に基づき、送信航空機のタイミングに同期される。例えば、この技術は、GPSが一時的に利用不能な場合に、金融機関のクロックを正確な基準に同期させるために用いられ得る。
【0008】
本発明の上述の特徴、さらなる特徴および利点は、以下の規定、記載、およびその特定の実施形態の説明的図を考慮すると明らかとなる。さまざまな図における類似の参照数字は、類似の構成要素を指定するために使用される。これらの記載は、発明の具体的詳細に踏み込むが、変形例が存在し得、変形例は、本明細書における記載に基づき、当業者に明らかであることを理解されたい。
【0009】
例えば、本発明は以下の項目を提供する。
(項目1)
モバイルデバイスの位置を決定する方法であって、
該方法は、
該モバイルデバイスにおいて、複数のメッセージを複数のモバイル基準デバイスのそれぞれから受信することであって、放送される該メッセージの各々は、基準時間に対して既知のタイミングを有している複数のメッセージ開始適用(MSO)時刻のうちの1つで始まり、該メッセージの各々は、該メッセージを送信する該モバイル基準デバイスに対する位置情報と、該メッセージの送信が開始される該MSO時刻を示すMSO値とを含む、ことと、
該モバイルデバイスにおいて受信されるメッセージの各々の受信の時間を決定することと、
該モバイルデバイスにおいて受信されるメッセージの各々の送信の時間を決定するために、該MSO値を用いることと、
該メッセージの送信の時間および受信の時間と、該モバイル基準デバイスに対する位置情報とに基づいて該モバイルデバイスの位置を多辺測量により、決定することと
を含む、方法。
(項目2)
前記メッセージは、それぞれの空中の航空機から受信される、上記項目のうちのいずれかに記載の方法。
(項目3)
前記複数のメッセージの各々は、放送型自動従属監視(ADS−B)メッセージであり、該ADS−Bメッセージは、該ADS−Bメッセージを送信するADS−Bを備えたモバイルプラットフォームに対する前記MSO値ならびに緯度、経度および高度情報を含む、上記項目のうちのいずれかに記載の方法。
(項目4)
前記モバイルデバイスから、前記メッセージから決定された該モバイルデバイスの位置を放送することをさらに含む、上記項目のうちのいずれかに記載の方法。
(項目5)
前記送信の時間は、協定世界時(UTC)エポックに対して決定される、上記項目のうちのいずれかに記載の方法。
(項目6)
モバイルプラットフォーム上に配置されたプロセッサを含む装置であって、該プロセッサは、複数のメッセージを複数のモバイル基準デバイスのそれぞれから受信するように構成されており、放送される該メッセージの各々は、基準時間に対して既知のタイミングを有している複数のメッセージ開始適用(MSO)時刻のうちの1つで始まり、該メッセージの各々は、該メッセージを送信する該モバイル基準デバイスに対する位置情報と、該メッセージの送信が開始される該MSO時刻を示すMSO値とを含み、該プロセッサは、
該モバイルプラットフォームにおいて受信される該メッセージの各々の送信の時間を決定することであって、該送信の時間は、該MSO値から決定される、ことと、
該メッセージの各々の送信の時間および受信の時間と該モバイル基準デバイスに対する位置情報とに基づいて該モバイルプラットフォームの位置を多辺測量により、決定することと
を行うように構成されている、装置。
(項目7)
前記プロセッサは、空中の航空機から受信される複数のメッセージの各々の送信の時間を決定するように構成されている、上記項目のうちのいずれかに記載の装置。
(項目8)
前記プロセッサは、
放送型自動従属監視(ADS−B)を備えた複数のモバイルプラットフォームのそれぞれから受信された複数のADS−Bメッセージの各々の送信の時間を決定することであって、各ADS−Bメッセージの送信の時間は、各ADS−Bメッセージの中に含まれる前記MSO値から決定される、ことと、
該ADS−Bメッセージに含まれる位置情報に基づいて該モバイルプラットフォームの位置を決定することと
を行うように構成されている、上記項目のうちのいずれかに記載の装置。
(項目9)
前記プロセッサは、放送のために、前記モバイルデバイスの位置を送信器システムに供給するようにさらに構成されている、上記項目のうちのいずれかに記載の装置。
(項目10)
前記プロセッサは、前記送信の時間を協定世界時(UTC)エポックに対して決定するように構成されている、上記項目のうちのいずれかに記載の装置。
(項目11)
ソフトウェアによって符号化される1つ以上のコンピュータ読み取り可能格納媒体であって、該1つ以上のコンピュータ読み取り可能格納媒体は、コンピュータ実行可能命令を含み、該コンピュータ実行可能命令は、該ソフトウェアが実行された場合に、
モバイルプラットフォームにおいて、複数のモバイル基準デバイスのそれぞれから受信される複数のメッセージの各々の送信の時間を決定することであって、放送される該メッセージの各々は、基準時間に対して既知のタイミングを有している複数のメッセージ開始適用(MSO)時刻のうちの1つにおいて始まり、該メッセージの各々は、該メッセージを送信する該モバイル基準デバイスに対する位置情報と、該メッセージの送信が開始される該MSO時刻を示すMSO値とを含む、ことと
該メッセージの各々の送信の時間および受信の時間と該モバイル基準デバイスに対する位置情報とに基づいて該モバイルプラットフォームの位置を多辺測量により、決定することと
を行うように動作可能である、コンピュータ読み取り可能格納媒体。
(項目12)
前記送信の時間を決定するように動作可能である前記命令は、空中の航空機から受信されるメッセージの送信の時間を決定するように動作可能である命令を含む、上記項目のうちのいずれかに記載のコンピュータ読み取り可能格納媒体。
(項目13)
前記送信の時間を決定するように動作可能である前記命令は、複数の放送型自動従属監視(ADS−B)メッセージの各々の送信の時間を決定するように動作可能である命令を含み、該ADS−Bメッセージは、ADS−Bを備えた複数のモバイルプラットフォームのそれぞれから受信され、各ADS−Bメッセージの送信の時間は、各ADS−Bメッセージの中に含まれる前記MSO値から決定され、
前記モバイルプラットフォームの位置を決定するように動作可能な前記命令は、該ADS−Bメッセージに含まれる位置情報に基づいて多辺測量を行うように動作可能である命令を含む、上記項目のうちのいずれかに記載のコンピュータ読み取り可能格納媒体。
(項目14)
放送のために、前記モバイルデバイスの位置を送信器システムに供給するように動作可能な命令をさらに含む、上記項目のうちのいずれかに記載のコンピュータ読み取り可能格納媒体。
(項目15)
前記送信の時間を決定するように動作可能な前記命令は、該送信の時間を協定世界時(UTC)エポックに対して決定するように動作可能である命令を含む、上記項目のうちのいずれかに記載のコンピュータ読み取り可能格納媒体。
(項目16)
モバイルデバイスの位置を決定する方法であって、
該方法は、
該モバイルデバイスにおいて、複数の放送型自動従属監視(ADS−B)メッセージを複数のモバイルADS−B放送デバイスのそれぞれから受信することと、
該モバイルデバイスにおいて受信される該ADS−Bメッセージの各々の受信の時間を決定することと、
該モバイルデバイスにおいて受信される該ADS−Bメッセージの各々の送信の時間を、該ADS−Bメッセージの各々のフィールドまたはそれぞれの後続のメッセージのフィールド内に含まれる情報から決定することと、
該ADS−Bメッセージの送信の時間および受信の時間と、該モバイルデバイスにおいて受信される該ADS−Bメッセージに含まれる前記モバイルADS−B放送デバイスに対する位置情報とに基づいて該モバイルデバイスの位置を多辺測量により、決定することと
を含む、方法。
(項目17)
前記ADS−Bメッセージは、空中の航空機から送信される、上記項目のうちのいずれかに記載の方法。
(項目18)
前記ADS−Bメッセージの各々の送信の時間を前記それぞれの後続のメッセージを介して受信することをさらに含み、該それぞれの後続のメッセージは、それぞれのADS−Bメッセージの送信の時間を含むように再構成されている航空機IDおよびカテゴリー(ACID)メッセージを含む、上記項目のうちのいずれかに記載の方法。
(項目19)
前記モバイルデバイスから、前記ADS−Bメッセージから決定される該モバイルデバイスの位置を放送することをさらに含む、上記項目のうちのいずれかに記載の方法。
(項目20)
前記モバイルデバイスにおいて受信される前記ADS−Bメッセージの各々の送信の時間は、無作為化されている、上記項目のうちのいずれかに記載の方法。
(項目21)
ローカルクロックをモバイル基準デバイスのタイミングに同期させる方法であって、
該方法は、
放送型自動従属監視(ADS−B)メッセージを、該ローカルクロックと共に配置されたADS−B受信器において受信することであって、該ADS−Bメッセージは、該モバイル基準デバイスから送信される、ことと、
該ADS−B受信器において受信される該ADS−Bメッセージの受信の時間を決定することと、
該ADS−Bメッセージの送信の時間を、該ADS−Bメッセージに含まれる情報または後続のメッセージに含まれる情報から決定することと、
該ADS−Bメッセージの送信の時間および受信の時間に基づいて該ローカルクロックをモバイル基準デバイスのタイミングに同期させることと
を含む、方法。
(項目22)
前記ADS−Bメッセージは、空中の航空機から受信される、上記項目のうちのいずれかに記載の方法。
(項目23)
前記ADS−Bメッセージは、メッセージ開始適用(MSO)値を含むADS−Bメッセージであり、該ADS−Bメッセージの送信の時間は、該MSO値から決定される、上記項目のうちのいずれかに記載の方法。
(項目24)
前記ADS−Bメッセージは、1090ESプロトコル下で送信される、上記項目のうちのいずれかに記載の方法。
(項目25)
前記ADS−Bメッセージの送信の時間は、後続のメッセージにおいて受信される、上記項目のうちのいずれかに記載の方法。
【0010】
(摘要)
モバイルデバイスの位置を決定する技術は、メッセージをそれぞれのモバイル基準デバイスから受信することを含む。放送されるメッセージの各々は、基準時間に対して既知のタイミングを有している複数の所定のメッセージ開始適用(MSO)時刻のうちの1つで始まる。メッセージの各々は、メッセージの送信が開始されたMSO時刻を識別するMSO値を含む。MSO値は、モバイルデバイスにおいて受信されたメッセージの各々の送信の時間を決定するために用いられる。モバイルデバイスの位置は、多辺測量によって決定される。別のアプローチに従うと、モバイルデバイスは、ADS−Bメッセージのセットをモバイル基準デバイスのそれぞれのセットから受信する。ADS−Bメッセージの各々
の送信の時間は、ADS−Bメッセージ自体、または後続のメッセージにおいて供給され、モバイルデバイスの位置を決定するために用いられる。
【図面の簡単な説明】
【0011】
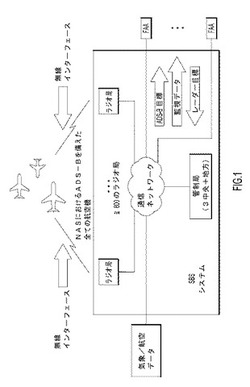
【図1】図1は、監視および放送サービス(SBS)システムの最上位レベルのブロック図であり、SBSシステムは、SBSシステムがインターフェース接続するシステムとの関連で示される。
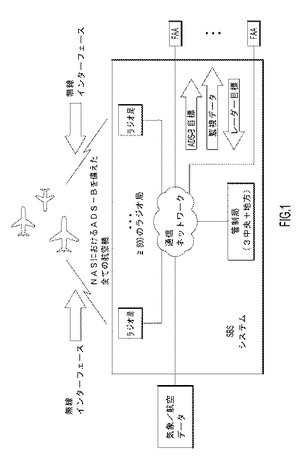
【図2】図2は、SBS地上ラジオ局とADS−Bを備えた航空機との間のデータフローを概念的に例示する図である。
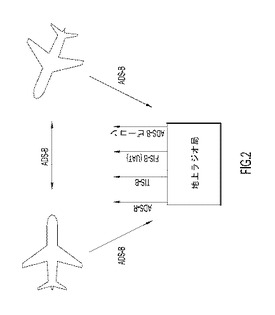
【図3】図3は、位置決定をサポートするための、複数の放送航空機からの空対空のクロスリンクメッセージの受信航空機による受信を概念的に例示する図である。
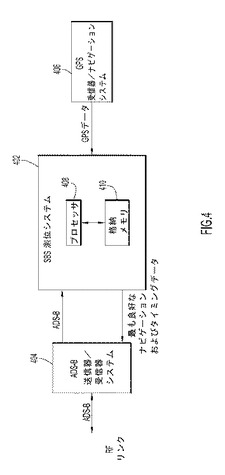
【図4】図4は、SBS測位システムのブロック図であり、SBS測位システムは、位置を決定するために、ADS−B送信器/受信器システムおよびGPS受信器/ナビゲーションシステムに結合される。
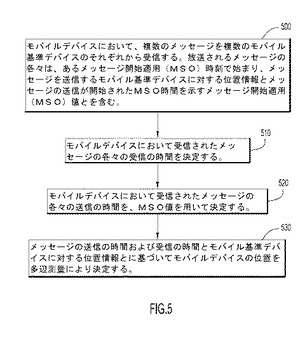
【図5】図5は、モバイルデバイスによって、その位置を複数のモバイルADS−B放送デバイスから受信されるメッセージから決定するために行われる動作の機能的なフローチャートである。
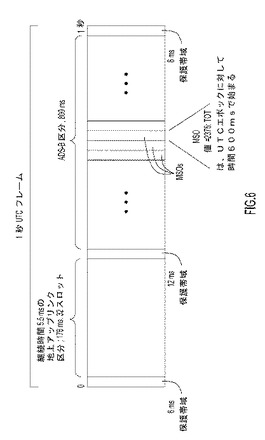
【図6】図6は、1秒UTC時間フレームの関連内のADS−Bメッセージに対するメッセージ開始適用を示す図である。
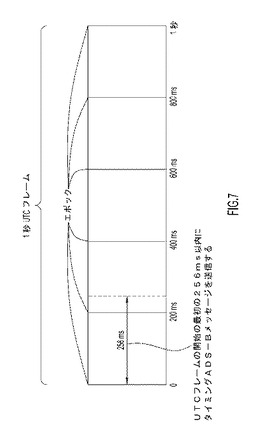
【図7】図7は、1090ESプロトコル内の1秒UTC時間フレームの区分を示す図である。
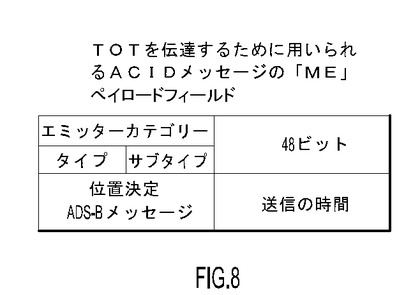
【図8】図8は、送信の時間を伝達する航空機IDおよびカテゴリー(ACID)メッセージの再利用を示す図である。
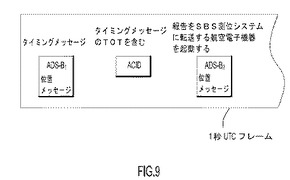
【図9】図9は、1090ESプロトコル下でADS−Bメッセージを用いて、位置決定を実装するためのメッセージのシーケンスを示すタイミング図である。
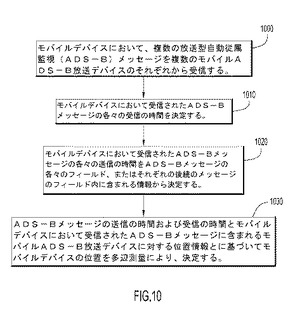
【図10】図10は、モバイルデバイスによって、その位置をモバイルADS−B放送デバイスによって放送されたADS−Bメッセージから決定するために行われる動作を要約する機能的なフローチャートである。
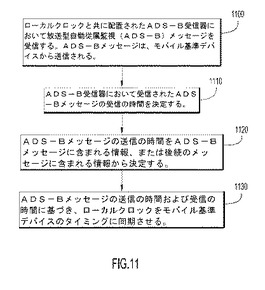
【図11】図11は、受信器デバイスによって、ローカルクロックをモバイル基準デバイスとして機能するモバイルADS−B放送デバイスに同期させるために行われる動作を要約する機能的なフローチャートである。
【発明を実施するための形態】
【0012】
(詳細な説明)
受信器において位置およびタイミングを決定する技術が本明細書において記載される。受信器は、1つ以上のモバイルソース送信器から放送信号を受信する。モバイルソース送信器は、自身の位置およびタイミングを信頼性を有して知っている。1つのアプローチに従うと、従来から航空機産業をサポートしている既存および僅かに改変された放送型自動従属監視(ADS−B)送信が空中、海上および地上ベースのプラットフォームにナビゲーションおよびタイミングソリューションを提供するために採用され得る。
【0013】
監視および放送サービス(Surveillance and Broadcast Services)(SBS)システムは、航空管制およびナビゲーションをサポートし、種々のサービスをADS−Bを備えた航空機に提供するように設計されている。National Airspace System(NAS)には、2つの適用可能なADS−Bリンク技術が存在する。Mode−S技術の拡張である1090 Extended
Squitter(1090ES)と、より新しい技術であるUniversal Access Tranceiver(UAT)とである。1090ES技術では、1090ES航空電子機器が1090MHzでメッセージを周期的に放送する。メッセージは、その識別(24ビットアドレス)、目標状態ベクトル(位置、速度)および他の航空機の
状態情報を提供する。UAT技術では、UAT航空電子機器が978MHzで、その識別、目標状態ベクトルおよび他の状態情報を提供するメッセージを周期的に放送する。1090ESは、主に高い高度の商業用航空機に適合され、世界規模で用いられているが、UATは、商業用航空機よりも低い高度で飛ぶ傾向のある、ジェネラルアビエーション(GA)航空機向けに市場取引される。
【0014】
図1は、SBSシステムを例示し、SBSシステムは、SBSシステムがインターフェース接続するシステムとの関連で例示されている。米国におけるSBSシステムは、現在、約800の地上ラジオ局を含んでおり、それらは、無線インターフェース(ワイヤレス)を介して、アップリンクとダウンリンクとの両方のカバレッジを、領空にいるADS−Bを備えた全ての航空機に提供する。SBS地上ラジオ局(本明細書においては、単に「地上局」とも呼ばれる)は、例えば、遠距離通信塔などに位置決めされ得る。数多くの中央および地方管制局が、ADS−B目標報告を供給するFAAサービス提供点(SDP)からのADS−B報告と、レーダーおよび他のセンサーからの目標データを供給するFAA SDPからのレーダー/センサー報告と、気象および航空データソースによって供給された気象/航空データと、FAAがサービスプロバイダーの状態をSBSシステムを介して、独立して監視することを可能にする他のデータとの処理に責任を負う。SBSシステムは、全てのデータソース(目標、気象および航空)とデータ処理管制局とエンドユーザーとの間に接続性を提供する通信ネットワークをさらに含む。
【0015】
図2は、SBSシステムにおいて放送されるメッセージのタイプの全体的な概観を提供する。ADS−Bサービスは、監視情報を、航空管制のために、地上システムに提供するADS−Bを備えた航空機から、航空機の状況認識における使用のために、同様のものを備えた航空機への送信を用いる。図2は、航空機によって放送されるADS−Bメッセージが他の航空機(空対空のクロスリンク)およびSBS地上局(空対地上)によって受信されることを例示する。ADS−B INを備えた航空機は、ADS−B送信を、同じリンク技術を備えた他の航空機へ送信、および他の航空機から受信する能力を有している(つまり、UATを備えた航空機は、互いに通信することができ、1090ESを備えた航空機は、互いに通信することができる)。
【0016】
従来から、航空機は、GPS、または機内の内部ナビゲーションシステム(INS)のような他のソースを用いて、地球のWorld Geodetic System(WGS)84モデル(例えば、緯度、経度および高度)との関連で自身の位置を決定する。航空機の状態ベクトルは、他の航空機および地上局への放送のためにADS−Bメッセージに符号化される。1090ESリンクの場合には、ADS−B送信は、実際は、一連の別個のメッセージ(例えば、位置メッセージ、速度メッセージなど)である。UATでは、ADS−Bメッセージは、要求された状態ベクトル情報を含む複数のフィールドを有している単一のパケットであり得る。
【0017】
これらのADS−Bメッセージは、ラジオ送信の範囲内の航空機に関する位置情報を航空機内のアプリケーションに提供する。該位置情報は、フライトクルーに、監視情報および監視ベースのガイダンスおよび警報を直接提供し得る航空機監視および分離保障アプリケーションをサポートする。SBSシステムの地上局は、また、航空機によって放送されたADS−Bメッセージを受信し、航空機位置情報を地上管制局へ中継する。地上管制局は、情報を処理し、妥当性チェックを行い、監視情報の低待ち時間フィードを、分離保障および他の航空管制サービスにおける使用に指定されたFAA SDPに提供する。より詳細に下に記載されるが、ビーコン様ADS−Bメッセージも、地上ベースの障害物のような航空機以外のプラットフォームによって送信されることがあり得、航空機に警報する。
【0018】
再び図2を参照すると、SBSシステムの地上局は、また、アップリンクメッセージを範囲内の航空機に放送する。再放送型自動従属監視(Automatic Dependent Surveillance−Rebroadcast)(ADS−R)は、本質的に、1つのリンク技術を用いる航空機によって、互換性を有さないリンク技術を用いる近くの航空機へ送信されたADS−B情報の再送信または中継である。例えば、UATおよび1090ESリンクをそれぞれ用いる第一および第二の航空機が同じ周辺にある場合に、UAT ADS−Bメッセージを第一の航空機から受信するSBS地上局は、1090ES互換ADS−Rメッセージで、そのメッセージの内容を再放送し得る。1090ES互換ADS−Rメッセージが第二の航空機(その逆も同様)によって受信され得ることによって、航空機が互いの位置情報を受信することを可能にする。
【0019】
ADS−Bを備えた航空機にADS−Bを備えていない航空機に対する監視情報を提供する放送型交通情報サービス(TIS−B)メッセージを、地上局は、また、レーダー、ASDE−Xおよび多辺測量システム(multi−lateration system)のようなソースから送信する。
【0020】
地上局は、航空機に地上ベースの障害物などを警報するように設計されているADS−Bメッセージのタイプである「ビーコン」ADS−Bメッセージを送信するようにも構成され得る。
【0021】
UATリンクを採用して、SBS地上局によって航空機に放送される別のアップリンクメッセージは、放送型フライト情報サービス(FIS−B)メッセージであり、これは、気象、航空データおよび飛行士への通知(NoTAMS)のような一般的な情報を伝達することによって、フライトに影響し得る地方天候および航空システム変更の情報を時宜よく提供するために用いられる。
【0022】
UATリンクプロトコル内では、隣り合う航空機間のコンテンションを回避するために、ADS−Bメッセージは、特定の航空機が、メッセージ開始適用(MSO)と呼ばれる時間のある離散点で始まるメッセージを放送する、同期され、時間区分されたフレームワーク内で放送される。各ADS−Bメッセージは、送信航空機の緯度、経度、高度、および送信の時間が決定され得るMSO値を含む。発明の一局面に従うと、空中の航空機のようなモバイルプラットフォームから送信されたADS−Bメッセージは、ナビゲーションソリューションを航空機および他のモバイルプラットフォームに提供するために用いられ得る。図3に概念的に示されるように、ADS−B送信器を備えた航空機または他のプラットフォームは、複数の航空機から受信される空対空のクロスリンクADS−Bメッセージを採用する。UATおよび1090ESプロトコルが顕著に異なるので、航空機またはADS−Bを備えた他のモバイルプラットフォームからのメッセージセットを既存のADS−Bおよび僅かに改変されたADS−Bを用いて、位置を決定するために、異なる実装が採用され得る。航空機SBS測位システム(SPS)可能航空電子機器は、これらのメッセージセットを受信し、多辺測量アルゴリズム(GPSと共に用いられるものに類似する)およびKalmanフィルタリングなどに基づき、状態ベクトルナビゲーションソリューションを形成する。ナビゲーションソリューションの精度値(例えば、ナビゲーション一体性カテゴリー(NIC)、ナビゲーション精度カテゴリー(NAC)およびソース一体性レベル(SIL))も計算され得る。任意で、これらの精度値は、アップリンクされたメッセージから決定されたナビゲーションソリューションが、現在のGPSナビゲーションソリューションよりも優れたまたは劣った正確性を有しているか否か、および、より優れた精密なナビゲーションソリューションが保持され得るかを決定するために用いられ得る。SPS航空電子機器は、選択されたナビゲーションソリューションを、ADS−Bメッセージを介して放送される航空機データバスにフィードバックする。ADS−Bメッセージは、地上局および他の航空機によって受信され得ることによって、地上および空
中での監視を維持する。
【0023】
図4は、自身の位置をADS−Bを備えたモバイルデバイスのセット(例えば、空中の航空機)から受信された空対空のクロスリンクADS−Bメッセージから自身の位置を決定する能力を有しているSBS測位システム(SPS)402のブロック図である。SBS測位システム402は、ADS−B送信器/受信器(トランシーバー)システム404およびGPS受信器/ナビゲーションシステム406に結合される。SBS測位システム402は、図4において、プロセッサモジュール408によって表される処理能力を含む。プロセッサ408は、さまざまな動作およびタスクを行うプログラム命令(つまり、ソフトウェア)を実行する能力を有している。例えば、プロセッサ408は、ABS−B送信器/受信器システム404およびGPS受信器/ナビゲーションシステム406から受信されたデータおよびコマンドを解釈することができ、計算を行うことができ、情報を格納させ得る。例えば、プロセッサ408は、マイクロプロセッサ、マイクロコントローラー、デジタルシグナルプロセッサなどである。
【0024】
SBS測位システム410の格納能力は、格納/メモリモジュール410によって表され、格納/メモリモジュール410は、ADS−B送信器/受信器システム404およびGPS受信器システム406によって供給されたメッセージおよびメッセージ情報に関する情報ならびに計算の結果および他のデータまたは情報を格納し得る。格納/メモリモジュール410は、動作を行うためにプロセッサ408によって実行されるプログラム命令(つまり、ソフトウェア)も格納し得る。したがって、本明細書において記載される動作および方法は、SBS測位システム402内に設けられた単数または複数のプロセッサ上のコンピュータ読み取り可能媒体(つまり、ソフトウェア)に格納された命令を実行することによって行われ得る。本明細書において用いられる場合、「コンピュータ読み取り可能媒体」という用語は、「非一時的」または有形媒体(例えば、メモリまたは格納デバイス)を指す。格納/メモリモジュール410は、非一時的なプロセッサ読み取り可能またはコンピュータ読み取り可能メモリである。非一時的なプロセッサ読み取り可能またはコンピュータ読み取り可能メモリは、プロセッサ408によって実行された場合に、プロセッサ408に本明細書において記載される機能を行わせる命令を格納するか、または命令によって符号化される。図4は、格納/メモリモジュール410に格納されたソフトウェアを実行するデータプロセッサ408を含む処理環境を示すが、代替の処理環境は、固定されたハードウェア論理を通して、論理の機能を行うように構成されている特定用途向け集積回路(ASIC)のような固定されたデータ処理素子である。さらに別の可能なデータ処理環境は、1つ以上のフィールドプログラマブル論理デバイス、ファームウェア、もしくは固定された処理素子、ファームウェアおよび/またはプログラマブル論理デバイスの組み合わせを含むものである。
【0025】
図4において、SBS測位システム402がADS−B送信器/受信器システム404とは別個のシステムとして概念的に示されている。任意で、SBS測位システム402によって表される能力は、例えば、ソフトウェアアップグレードまたはアプリケーションとして、ADS−B IN航空電子機器(つまり、図4におけるADS−B送信器/受信器システム404)に一体化され得る。
【0026】
図5において示されるフローチャートは、例えば、UATプロトコルの時分割多重化スキームのメッセージを用いて、航空機または別のモバイルプラットフォームまたはデバイスの位置を決定するために採用される技術を要約する。ここで、ADS−Bを備えた航空機のようなモバイル基準デバイスのセットから受信されたメッセージは、信頼できる送信器の位置情報およびMSO値を含む。
【0027】
動作500において、モバイルデバイスは、複数のメッセージを複数のモバイル基準デ
バイスのそれぞれから受信する。本明細書において用いられた場合は、モバイルデバイスは、位置メッセージを送信または受信する能力を有している任意のデバイスをであり、空中の航空電子機器システム、海上のナビゲーションシステム、地上の乗り物に搭載されたナビゲーションシステム、およびハンドヘルドまたは身体搭載デバイスのようなポータブルナビゲーションデバイスを含む。メッセージの各々は、基準時間に対して既知のタイミングを有しているあるMSO時刻で始まり、放送される。メッセージの各々は、放送基準デバイスに関する位置情報も含む。
【0028】
例えば、一般の航空電子機器航空機を目標にしたUATプロトコルで、ADS−Bメッセージが航空機から放送され、航空機の現在の位置のような情報を伝達する。送信航空機のセットからの既存のADS−Bメッセージを処理することによって、受信航空機または他のUATを備えたプラットフォームは、自身のナビゲーションソリューション(位置)を決定し得る。図4に示される例において、オンボードADS−Bトランシーバーシステム404は、ADS−Bメッセージを受信し、位置決定処理のために、そのADS−BメッセージをSBS測位システム402に供給する。
【0029】
UATを備えた航空機によって受信されるADS−Bメッセージは、特定の規則によって送信される。各航空機は、メッセージ開始適用(MSO)と呼ばれる、周期的なある離散的な瞬間で、一定程度正確に始まるADS−Bメッセージを送信するために要求される。特に、航空機は、協定世界時(UTC)に同期され、1秒時間フレームに従い、信号通知が計画される。図6において示されるように、1秒UTC時間フレームのUAT時間分割は、送信が許可されない6ms保護帯域で始まり、176ms地上アップリンク区分が続く。次いで、12ms保護帯域は、地上アップリンク区分を800msADS−B時間区分から分離させ、1秒UTCフレームの終わりに、最後の6ms保護帯域が続く。FIS−Bメッセージは、アップリンク時間区分中にSBS地上局によって送信されるが、ADS−B時間区分は、TIS−BおよびADS−RをアップリンクするSBS地上局と、ADS−Bメッセージを他の航空機およびSBS地上局に放送する航空機によって用いられる。地理的な領域送信内のADS−Bを備えた航空機は、800msADS−B区分内の異なるMSOで無作為に始まる。しかし、MSOは、UTC秒内に固定され、送信される「長い」UATメッセージ内で符号化されるので、送信の時間は受信の際に、符号化されたMSO値から絶対的に決定され得る。
【0030】
800msADS−B区分は、3200個のMSO時刻瞬間に分割される。各々は、250μsの間隔を有している。各MSOは、「長い」UATメッセージで符号化される(12ビットMSOの6つのLSBがメッセージで符号化され、6つのMSBは、受信サブシステムによって、概算的に決定され得る)。各MSOは、1秒UTC時間フレーム(つまり、UTCエポック)の始まりに対する特定のタイミングを示す。例えば、「2376」のMSOは、フレームの始まりに対応するUTC0秒時間エポック(この例は、フレームにおける第一のMSO値が「0」を付されると想定する)後の600msにおける(2376×0.25ms+6ms(最初の保護帯域))MSOに対応する。
【0031】
RTCA DO−282Bセクション2.2.4において特定されるように、UAT ADS−Bメッセージは、種々の情報を含む。例えば、3つのフィールドは、それぞれ、送信航空機の緯度、経度および高度を含む。さらに、UATプロトコル下では、各ADS−Bメッセージは、そのメッセージに適用されるMSO値を含むフィールドを含む。UTC期間からUTC期間までに、特定の航空機のMSO値が変わることに注意されたい。しかし、個別のADS−Bメッセージの送信の時間は、UTC時間エポックに対して、ADS−Bメッセージに含まれるMSO情報に基づき、決定され得る。
【0032】
再び図5を参照すると、動作510において、メッセージの各々が受信された際に、モ
バイルデバイスは、メッセージの受信の時間を決定する。送信された信号の到着の時間を精密に決定する技術は周知であり、種々の技術のいずれかが、各信号の受信の時間を決定するモバイルデバイスによって採用され得る。図4に示される例において、ADS−Bトランシーバーシステム404は、範囲内の航空機から到着するADS−Bメッセージの受信の時間を決定し得る。
【0033】
動作520において、モバイルデバイスにおいて受信されたメッセージの各々の送信の時間(TOT)は、メッセージ自体内に含まれるMSO値から決定され得る。UATプロトコルの下で放送されたADS−Bメッセージの場合は、UTC時間フレームのADS−B区分における各MSO値の間隔は既知(つまり、250μs)である。したがって、UTC時間フレームの始まりに対する送信の時間は、MSO値をMSO間隔によって乗算し、先行する保護帯域を占めることによって決定され得る。再び図4を参照すると、ADS−Bメッセージの受信の際に、ADS−Bトランシーバーシステム404は、メッセージのフィールドに含まれるMSO値を識別し(例えば、図6に示された例においては、MSO値=2376)、MSO値をさらなる処理のために、SBS測位システム402に供給する。MSO値は、連続的であり、各MSOは、既知の間隔を有しているので、2376のMSO値は、先に記載したように、時間フレームの開始の600ms後に始まる。したがって、SBS測位システム402は、ADS−Bメッセージの送信の時間をADS−Bメッセージ含まれるMSO値から決定し得る。
【0034】
動作530において、モバイルデバイスは、メッセージの送信の時間および受信の時間と、受信されたメッセージにおいて、モバイルデバイスに報告されるモバイル基準デバイスの位置とに基づいて自身の位置を多辺測量により決定する。図4に示される例において、放送航空機の位置は、ADS−Bメッセージにおいて符号化された緯度、経度および高度情報を介してADS−Bトランシーバー404に供給され、この情報は、SBS測位システム402へ転送される。受信航空機の場合は、航空機は、その高度を大気圧を測定する機内機器から信頼性を有して、知ることができる。
【0035】
モバイル基準デバイス(例えば、ADS−Bを備えた送信航空機)およびモバイルデバイス(例えば、ADS−Bトランシーバーシステム404およびSBS測位システム402)は、UTC時間に同期されているので、メッセージ(例えば、ADS−Bメッセージ)のフライトの時間は、送信の時間と受信の時間との間の差異として決定され得る。次いで、各モバイル基準デバイスから受信モバイルデバイスまでの距離が、メッセージ信号のフライトの時間を光の速さによって乗算することによって決定され得る。送信の時間は、クロスリンクメッセージに含まれるMSO値からのみによって、確実に決定され得ることに注意されたい。したがって、受信デバイスが、任意のメッセージおける送信情報の時間を実際に受信せずに、送信の時間を決定することを可能にするUAT放送プロトコルの時間区分された性質を技術は利用する。むしろ、標準的なUAT ADS−Bメッセージに既に提供されているMSO値は、受信器が送信の時間を精密に決定することを可能にするのに十分である。
【0036】
SBS測位システム402は、多辺測量を用いて、ナビゲーションソリューション(つまり、プラットフォームの位置)を決定するために、受信された位置情報と、送信および受信の時間から決定された各送信航空機へのフライト(無線での信号伝搬)の距離または時間とを用いる。一般的には、少なくとも3つまたは4つの送信モバイルデバイスからの放送信号の受信が最初の位置ソリューションを発展させるために、1秒時間フレームにおいて要求される。
【0037】
受信されたADS−Bメッセージの各セットから瞬間位置測定を計算することに加えて、SBS測位システム402は、Kalmanフィルタリングまたは他のフィルタリング
または追跡アルゴリズムを用いて、GPS受信器システムに類似する態様で、状態ベクトルナビゲーションソリューションを形成することによって、時間にわたり、位置を追跡し得る。前記のナビゲーションソリューションの品質/精度値(NIC、NACおよびSIL)もRTCA規格毎に計算され得る。
【0038】
SBS測位システム402は、また、GPS受信器システム406から、状態ベクトルの形態でナビゲーションソリューションを精度値と共に受信する。GPSデータが一時的に利用不能になった場合は、SBS測位システム402がGPSナビゲーションソリューションをADS−Bナビゲーションソリューションで代用し得、それによって、ナビゲーションデータの信頼できるバックアップソースをADS−Bシステム内に提供する。
【0039】
任意で、品質値を用いて、SBS測位システム402は、ADS−Bメッセージから決定されたナビゲーションソリューションの精度を現在のGPSナビゲーションソリューションの精度に比較し得、2つのナビゲーションソリューションのうちのより正確な方を放送のために選択し得る。次いで、SPS測位システム402は、選択されたナビゲーションソリューションを、ADS−Bメッセージを介して放送されるADS−Bトランシーバーシステム404への航空機データバスにフィードバックする。ADS−Bメッセージは、SBS地上局および他の航空機によって受信され得、地上および空中での監視を維持する。
【0040】
したがって、一実装に従うと、SBS測位システム402は、時間エポックに対するADS−Bメッセージの送信の時間(TOT)(例えば、1秒UTC時間インターバルの始まりから経過した時間)を決定するために、受信されたADS−BメッセージのMSO値を用い得る。システムは、ADS−Bを備えた送信モバイルプラットフォームから、受信の時間とTOTとの間の経過した時間に基づき、その距離を決定し得る。各送信ADS−Bモバイルプラットフォームの場所は既知なので、受信器は、その位置を多辺測量を介して、モバイルプラットフォームのセットから送られたADS−Bメッセージから利用可能な情報を用いて、決定し得る。したがって、ADS−Bメッセージは、UAT受信器を備えたモバイルプラットフォーム(航空機、船舶、地上など)において受信され得ると想定し、モバイルプラットフォームは、ADS−Bを備えた一群の送信モバイルプラットフォーム(例えば、航空機)から受信されたADS−Bメッセージに存在するMSO値および緯度、経度および高度情報を用いることによって、その位置を決定し得る。UATソリューションは、モバイルデバイスの位置を決定するために、ADS−B送信機器に対して変更を要求せず、既存のメッセージから利用可能な情報を利用する。
【0041】
先述の実装は、UAT航空電子機器を備えた航空機に関連して記載されたが、位置決定技術は、ADS−Bメッセージを受信するために備えられた任意のモバイルデバイスと共に用いられ得、船舶、地上の乗り物ならびにハンドヘルドまたは身体搭載デバイスを含むことが認識される。さらに、記載された実装は、UATプロトコル内のソリューションを含むが、送信の時間を伝達するためにMSO値を用いるという概念は、任意の時間スロットまたは時間区分されたプロトコルで採用され得、それによって、他の信号通知プロトコル内の類似するソリューションをサポートする。
【0042】
1090ESプロトコルは、ある観点では、UATプロトコルと著しく異なる。1090ESは、識別可能なMSOを有する時間スロットシステムに基づかず、その結果、ADS−Bメッセージは、送信時間を精密に示すいずれの情報も含まない。したがって、別の信号通知機構が、1090ESプロトコルを用いて、航空機または他のプラットフォームと通信する空中の航空機からの空対空のクロスリンクメッセージに頼る位置決定スキームをサポートするように適合されなければならない。
【0043】
UTC同期1090ES送信器に対して、1秒UTC時間フレームが200msecインターバルに分割され、図7に示されるように、200ms毎に識別可能な時間エポックが生じる。これらのエポックは、代替的に「奇数」および「偶数」指定が割り当てられる。これらのエポックの各々は、ADS−Bメッセージに含まれる情報に対して適用可能な時間として機能し得る。例えば、メッセージを準備している従来のUTC結合1090ES航空機は、メッセージを時宜よい態様で送信器に搬送するために、さまざまなメッセージ占有活動を100ms時間期間内に行うことを要求される。メッセージで送信される航空機位置情報が時間の識別可能な点に関連付けられ得るように、航空機の航空電子機器は、最も近い200msecエポックに自身のナビゲーションソリューション(例えば、緯度、経度)を推定し、位置情報に対して有意な適用可能な時間を提供する。
【0044】
ADS−Bメッセージを受信する航空機または地上局は、適用可能な時間を最も近い200msecエポックとして、ADS−Bメッセージが受信された時間に基づき識別し得る。ADS−Bメッセージのフライトの時間が200ms未満であり、適用可能な時間として用いられたエポックは、「奇数」または「偶数」エポックであったかを示すビットをADS−Bメッセージが含む場合には、正しいエポックに関して受信器に曖昧さは存在しない。その結果、受信器エンドにおいて、ADS−Bメッセージは、送信器に関して優れた位置精度を提供する。なぜなら、メッセージは、送信器位置と、その位置が適用可能な瞬間との両方を特定するからである。
【0045】
しかし、受信の時間は、受信器がADS−Bメッセージに含まれる情報に関連付けられた適用可能な時間を決定することを可能にするが、受信器がADS−Bメッセージの送信の時間を決定することを可能にはしない。1090ESプロトコルは、頻繁な信号コンテンションを回避し、放送デバイス間の衝突を減少させるために、メッセージの送信時間を無作為化することを含み、それによって、送信の時間が顕著に不確かになる。結果として、1090ESプロトコルでは、ADS−Bメッセージの送信の時間は、レンジング、位置決定または時間同期をサポートするために十分な精度をもって、受信器において知られ得ない。この送信アプローチは、送信の時間を受信デバイスに報告する際の難問を示す。受信デバイスは、フライトの時間/距離を計算し、受信されたメッセージからナビゲーションソリューションを発展させるために送信の時間を要求する。したがって、標準的なビーコンADS−Bメッセージスキームに対するいくつかの改変が位置決定をサポートするために要求される。
【0046】
ADS−Bメッセージの送信の時間を1090ESプロトコルの受信航空電子機器に伝達する1つの選択肢は、送信の時間を追従メッセージのADS−Bメッセージ自体に符号化することである。このことは、既存の1090ESスキームに対して実質的に透明な数多くの方法によって達成され得る。送信の時間をADS−Bメッセージ自体に符号化するアプローチは、送信の時間はメッセージが生成されたときに既知であることを想定する。これは、現在の1090ESプロトコルでは一般的に真実ではない。別の選択肢は、送信器サブシステム(この場合は、送信モバイルプラットフォーム)から位置メッセージの送信の時間を決定することであり、次いで、送信の時間を受信航空電子機器に、後続のメッセージで供給することである。そのようなスキームは、1090ESでのADS−Bの一式のメッセージ内では特定のタイプのメッセージである航空機IDおよびカテゴリー(ACID)メッセージを用いることによって、実装され得る。
【0047】
航空機間の空対空のクロスリンク通信において意図された態様で用いられた場合は、ACIDメッセージが航空機間の分離を維持するために採用される。位置決定のために、受信エンドにおいて用いられるADS−Bメッセージに関連して、ACIDメッセージは、先行するADS−Bメッセージの送信の時間を伝達するために再利用され得る。図8において示され、RTCA DO−260Bセクション2.2.3.2.5において特定され
るように、ACIDメッセージの「ME」ペイロードフィールドは、タイプコードおよびサブタイプコードから成るエミッターカテゴリーを含む。タイプコードとサブタイプコードとは、一緒に、メッセージを送るエミッターのタイプ(例えば、大きな航空機、小さい航空機、ビーコンなど)を識別する。この場合は、これらのフィールドは、エミッターが位置決定の使用のためのADS−Bメッセージ(つまり、ADS−B位置メッセージ)を送っていることを示すために満たされる。タイプおよびサブタイプフィールドの後は、ACIDメッセージ構造は、48ビットを含む。より一般的な空対空に関連すると、これらのビットは、ASCII様フォーマットで符号化された8つの文字を伝達するために用いられる。航空機は、通常は、フライトID(例えば、「United Airlines
1531」)をここで挿入する。フライトIDは、分離および動作のために用いられ得る。
【0048】
ADS−Bメッセージが位置決定をサポートする場合には、ACIDメッセージにフライトIDが存在する必要はない。フライトIDは比較的固定しているので、ADS−B航空電子機器は、送信の時間を通信するために、このフィールドを断続的に用い得る。特に、ACIDメッセージの残りの48ビット(8文字)は、先に放送されたADS−Bメッセージの送信の時間を、1090ESプロトコルの規則に違反することなく、伝達するために用いられ得る。精密なレンジングをサポートするために、送信の時間は、10ns下の分解能に既知である必要がある。限定された数の文字をACIDメッセージに想定すると、送信の時間の分解能が大きくなると、文字によって表され得る時間インターバルは短くなる。先に記載されたUAT時間スロットソリューションに比較可能であるために、約1nsの分解能が要求される。
【0049】
ACIDメッセージの文字によって伝達され得る時間インターバルは限定されているので、符号化された送信の時間は、現在の1秒UTCフレームの始まりに対して特定され得る。例えば、242.435178msの送信の時間は、先行するADS−Bタイミングメッセージが、現在のUTCフレームの始まりの242.435178ms後に送信されたことを意味する。1つの選択肢に従うと、ACIDメッセージの8文字フィールドの最初の2文字は、ミリセコンドの送信の時間を示し得、次の3文字は、マイクロセコンドの送信の時間を示し得、最後の3文字は、ナノセコンドの送信の時間を示し得る。
【0050】
別のアプローチに従うと、最初の文字は、ACIDメッセージがタイミングメッセージであり、通常のフライトIDではないことと、残りのビットは、16進法で送信の時間を符号化するために用いられていることとを示すマーカーとして機能する特別な文字(例えば、コロンまたはセミコロン文字)で満たされ得る。概して、これは48ビットのより効率的な使用であり、256msまで1ns(7文字×16)の正確性によって符号化されることを可能にする。このことは、UATアプローチに比較可能な精度でレンジングおよび位置決定をサポートするのに十分である。結果として、ADS−Bタイミングメッセージは、図7に示されるように、その送信の時間が1nsの正確性を有して、ACIDメッセージに符号化されるために、1秒UTC時間フレームの始まりの最初の256ms内に送信モバイルプラットフォームから送信されるべきである。あるいは、4ns解像能が許容可能である場合は、1秒がACIDメッセージにおいて表され得、それによって、ADS−Bタイミングメッセージが1秒UTCフレームの開始に対して送信される場合の制約を取り除く。
【0051】
1090ESソリューションを既存のADS−B航空機の航空電子機器によって機械化するために、数多くの選択肢が利用可能である。図9において示されるように、1つのアプローチに従うと、3つのメッセージのシーケンスは、モバイルプラットフォームを1秒UTCフレーム内に送信することによって、放送され得る。3つのメッセージのシーケンスは、最初のADS−B位置メッセージと、最初のADS−B位置メッセージの送信の時
間を含むACIDメッセージと、SBS測位システムによって受信される報告を生成する受信航空機の航空電子機器を起動させる第二のADS−B位置メッセージとである。先に記載したが、曖昧さを避けるために、ADS−Bメッセージは、UTC時間フレーム内における適用可能な時間として偶数または奇数エポックを示すパリティービットを含む。第一のADS−B位置メッセージは、「偶数」パリティーメッセージとして特定され、第二のADS−B位置メッセージ(シーケンス中の第三のメッセージ)は、「奇数」パリティーメッセージとして特定される。
【0052】
現在の航空電子機器は、ADS−B位置メッセージの受信に応答して、出力報告を生成する。このスキームにおいて、最初のADS−B位置メッセージは、ADS−Bトランシーバーに報告を生成させ、その報告は、SBS測位システムに供給される。後続のACIDメッセージは、最初のADS−Bメッセージの送信の時間(TOT)をADS−Bトランシーバーシステムに供給するが、トランシーバーシステムに報告は生成させない。第二のADS−B位置メッセージは、ADS−Bトランシーバーシステムに第二の報告を生成させる。この第二の報告は、ACIDメッセージで受信されたTOTによって占有される。ACIDメッセージからのエミッターカテゴリー情報は、また、第二の報告に挿入され、SBS測位システムが第二の報告を第一の報告に関連付けることを可能にする(つまり、報告は、同じ航空機からのものであると識別可能である)。それによって、最初のASD−Bメッセージの、必要なTOTをSBS測位システムに提供する。実際には、このスキームは、SBSトランシーバーシステムが、必要なタイミング情報を2つ報告シーケンスにおけるSBS測位システムに、既存のADS−B航空電子機器に対して透明であり、既存の航空電子機器に対して、いずれのハードウェアまたはソフトウェア改変を要求しない態様で送ることを可能にする。もちろん、任意の種々の他の機構が用いられ得、将来の航空電子機器は、ADS−B位置メッセージに対する報告スキームを単純化するために実装され得る。
【0053】
1090ESプロトコル内の別の選択肢に従うと、ADS−Bメッセージ内の1つ以上のフィールドは、上に記載されたUATアプローチに類似する態様で、スロットIDまたはMSO値を符号化するために用いられ得る。例えば、ADS−Bメッセージ内のフィールドは、MSO値を符号化するために用いられ得る。しかし、MSO値が受信デバイスに対して有用であるためには、送信の時間がMSO値から導出可能でなければならず、送信の時間が、一定程度の正確性をもって、特定の時間に生じることを要求する。したがって、この選択肢は、1090ESプロトコル内の少なくともあるメッセージが送信の時間の無作為化をすることなしに送信されることを要求し、これは、1090ES機器におけるハードウェアまたはファームウェア変更を要求し得る。
【0054】
図10は、モバイルデバイスの位置を、航空機のようなモバイルプラットフォームから放送されたADS−Bメッセージから決定することに関する動作を要約する。動作1000において、モバイルデバイスは、複数のADS−Bメッセージを複数のモバイルADS−B放送デバイスのそれぞれから受信する。モバイルデバイスは、受信されたADS−Bメッセージの各々の受信の時間を動作1010において決定する。動作1020において、モバイルデバイスは、ADS−Bメッセージの各々のフィールドまたはそれぞれの後続のメッセージのフィールド内に含まれる情報(例えば、UTCエポックに対する送信の時間が、後続のACIDメッセージに符号化される)から、受信されたADS−Bメッセージの各々の送信の時間を決定する。モバイルデバイスは、ADS−Bメッセージの送信の時間および受信の時間ならびにモバイルデバイスにおいて受信されたADS−Bメッセージに含まれるモバイルADS−B放送デバイスに対する位置情報に基づいてその位置を動作1030において、多辺測量をにより決定する。特に、SBS測位システムは、ナビゲーションソリューションを決定するUATプロトコルに関する例において、上に記載されたのと本質的に同じ機構を採用し得、次いで、GPSナビゲーションソリューションに対
するバックアップとしてナビゲーション用い得るか、または精度値の比較に基づき、2つのナビゲーションソリューションのうちのより正確を用い得る。
【0055】
GPS信号と同様に、本明細書において記載される位置決定をサポートするADS−Bを備えたモバイルプラットフォームによって放送された信号は、受信器クロックのタイミングを基準デバイスのタイミングに同期させるためにも用いられ得る。この目的のために、受信デバイスは、モバイルデバイス(例えば、空中、海上または地上ベースのプラットフォーム)または固定設置(例えば、建造物に搭載された受信器)のどちらかであり得る。時間同期のためには、受信器は、単一のADS−B放送ソースのみからタイミングメッセージを要求する。なぜなら、多辺測量は必要ないからである。例えば、送信情報の時間を伝達するために、MSO値を採用するUATプロトコル実装において、単一の航空機からのADS−Bメッセージは、UAT受信器のクロックを航空機のクロックに同期させるために用いられ得る。同様に、1090ESプロトコル下では、ADS−Bメッセージシーケンスの受信は、時間同期を可能にする1つの航空機からのみ要求される。
【0056】
図11のフローチャートは、ローカルクロックを同期させる動作を要約する。動作1100において、ローカルクロックと共に配置されるADS−B受信器が、モバイルADS−B放送デバイスから送信されたADS−Bメッセージを受信する。ADS−B受信器において受信されたADS−Bメッセージの受信の時間は、動作1110において決定され、動作1120において、ADS−Bメッセージの送信の時間が、ADS−Bメッセージに含まれる情報または後続のメッセージに含まれる情報から(例えば、先に記載したメッセージに符号化されたMSO値または送信の時間を用いて)決定される。動作1130において、ローカルクロックは、ADS−Bメッセージの送信の時間または受信の時間に基づき、モバイルADS−B放送デバイスのタイミングに同期される。より具体的には、ローカルクロックのタイミング(例えば、時刻の値)とモバイルADS−B放送デバイスのクロックのタイミングとの間のタイミングエラーは、放送ADS−Bメッセージのフライトの時間および任意の既知または推定された処理遅延を含むタイミングオフセットを決定することによって計算され得る。タイミングエラーは、このタイミングオフセットと、ローカルと基準クロックとの実際の時間差との間の差異から計算され得る。タイミングエラーが決定されると、ローカルクロックのタイミングは、タイミングエラーによって調節され得、その結果、ローカルクロックのタイミングは、モバイルADS−B放送デバイスのタイミングと同じになる。
【0057】
この時間同期機構は、GPSが一時的または断続的に時間同期のために利用不能である場合に、特に有用であり得る。GPSなしでは、一般的なクロックは、約1時間以内に同期から外れる。これは、非常に高精密なセシウムクロックによって回避され得る。しかし、そのようなクロックの普及している使用は、費用が非常に高い(例えば、セシウムクロックサーバーは、現在、約30,000USドルのコストがかかる)。記載された時間同期スキームは、モバイルADS−B放送デバイス(例えば、航空機)が、受信器と互換性を有しているADS−Bをコストの一部(例えば、UAT受信器システムは、現在、約5,000USドルである)でプラットフォームに備えることによって、精密な時間基準を普及することを効率的に可能にする。
【0058】
モバイルデバイスに加えて、種々の固定プラットフォームは、モバイルADS−B放送デバイスにより放送されたメッセージによって提供される時間同期能力から利益を得ることができる。例えば、金融機関(例えば、株式取引所、仲買業務所、銀行など)を収容する建造物は、ローカルタイミング基準が金融取引のスタンピングまたはタギングの精密な時間のために、UTC時間との同期を維持することを可能にする少なくとも1つのモバイルADS−B放送デバイスからメッセージを受信する能力を有するUAT受信器を備え得る。これは、GPSに対するバックアップまたは一次基準ソースのどちらかとして用いら
れ得る。セルラー式電話塔もUTC時間同期を維持するために、ADS−B放送信号を一次または二次基準ソースとして用い得る。
【0059】
本明細書において記載された技術は、受信器が陸上の地上局からの信号にアクセスを有していない場合に、特に有益であり得る。例えば、海上関連では、海における船舶は、地上局から位置決定信号を受信する能力を有していない場合があるが、それでも、範囲内の頭上の航空機から信号を受信することができる。したがって、GPSに対する効果的な補償またはバックアップが、地上ベースの信号が利用可能でない幅広い範囲にわたり提供され得る。
【0060】
先述の明細書において、発明の実施形態が、その特定の例示的実施形態を参照して記載された。さまざまな改変が、以下の請求項に記載される発明のより広い精神および範囲を逸脱することなしに、それらの実施形態に対してなされ得ることが明らかである。特定の用語が本明細書において採用されたが、それらは、一般的および説明的な意味でのみ用いられ、限定の目的ではない。
【背景技術】
【0001】
(背景)
米国のNAVSTAR全地球測位システム(GPS)、欧州のガリレオ測位システムおよびロシアのGLONASSシステムのような全地球的航法衛星システム(GNSS)は、受信器機器の地理的な位置を正確に決定するため、および信頼できる精密な基準に従うタイミングを確立するために、ますます頼られている。二次監視レーダー(SSR)、VHF全方向式レンジ(VOR)および距離測定装置(DME)に頼るような従来アプローチは、役目を減らしているが、航空管制システムのある局面は、よりGPSナビゲーションに頼るように発展している。例えば、放送型自動従属監視(ADS−B)の監視に備えた航空機は、その位置を決定するために主にGPS信号に頼り、次いで、自身の位置を他の航空機および地上ラジオ局に報告する。GPSシステムに頼る別の例は、金融産業にみられ、そこでは、機関が金融取引に要求される精密なタイミングを維持するためにGPSシステムに頼っている。モバイル電話、ポータブルコンピュータおよびナビゲーションデバイスのような、GPSを備えた幅広い消費者製品がいたるところで見られるようになり、タイミングおよびナビゲーションのために、もっぱらGPSシステム、またはそれに匹敵するGNSS衛星ネットワークに頼るようになっている。
【0002】
しかし、種々の理由により、GPSサービスは完全に信頼できるわけではない。障害物(例えば、山岳地帯および「都市峡谷」)によって囲まれた場所は、GPS信号を断続的にしか受信しないか、または全く受信しないことがある。GPS衛星機器は、停電、故障または損傷を潜在的に受けることがあり得、大気の状態は、信号受信に潜在的に影響し得る。航空機産業においては、ADS−B監視システムは、精密、効率的および継続的なナビゲーションおよび監視をGPSに頼っている。GPSまたは他の衛星システムへ頼ることは、十分なバックアップを有していないGNSS受信器およびADS−B監視システムに対して共通の方式の故障になり得る。地上ベースのレーダーシステムは、監視を提供し得るが、現状のままでは、航空機にナビゲーションは提供できない。VOR/DMEのような他の航空位置導出デバイスは、信頼でき、効率的な航空機分離をサポートするために十分な精度およびカバレッジを有していない。
【発明の概要】
【発明が解決しようとする課題】
【0003】
したがって、幅広い地理的範囲にわたり精密なナビゲーションおよびタイミングを提供でき、エンドユーザーへのGPSと継ぎ目ない、信頼できるGPSに代わるものを有することが望ましい。
【課題を解決するための手段】
【0004】
(概要)
モバイルデバイスにおいて、複数のメッセージを複数のモバイル基準デバイスのそれぞれから受信することを含む空中、海上または地上ベースのプラットフォームにおけるデバイスのようなモバイルデバイスの位置を決定する技術が本明細書において記載される。放送されるメッセージの各々は、基準時間に対して既知のタイミングを有している複数のメッセージ開始適用(MSO)時刻のうちの1つで始まる。メッセージの各々は、メッセージを送信するモバイル基準デバイスに対する位置情報とメッセージの送信が開始されるMSO時刻を示すMSO値とを含む。モバイルデバイスは、メッセージの各々の受信の時間を決定し、モバイルデバイスが各メッセージの伝搬時間を計算できるように、または同等にモバイル基準デイバスの各々の距離を計算できるように、メッセージの各々の送信の時
間を決定するために、受信されたMSO値を用いる。次いで、モバイルデバイスに対するナビゲーションソリューションを決定するために、モバイルデバイスによって、モバイル基準デバイスに対する位置情報および信号伝搬時間(または距離)を用いて、多辺測量が行われ得る。
【0005】
一実装に従うと、メッセージは、空中の航空機または他のモバイルプラットフォームからの放送型自動従属監視(ADS−B)である。メッセージは、送信航空機に対する位置情報(例えば、緯度、経度および高度)を含み、メッセージの送信が始まり、そこから、送信の時間が受信モバイルデバイスにおいて決定され得るMSOを示すフィールドを含む。例えば、そのような時間スロットされたADS−Bメッセージは、ユニバーサルアクセストランシーバー(UAT)プロトコル内で採用される。
【0006】
モバイルデバイスの位置を決定するための他のアプローチは、モバイルデバイスにおいて、複数のADS−Bメッセージを複数の空中の航空機または他のモバイルプラットフォームのそれぞれから受信することに関する。モバイルデバイスは、受信されたADS−Bメッセージの各々の受信の時間を決定し、ADS−Bメッセージの各々の送信の時間をADS−Bメッセージの各々のフィールド、または後続のメッセージそれぞれのフィールド内に含まれる情報から決定する。(改変または再利用された1090 Extended
Squitterのような)ADS−Bメッセージは、送信航空機に対する位置情報を含み得、次いで、モバイルデバイスの位置は、多辺測量を介して、ADS−Bメッセージの送信の時間および受信の時間と送信航空機の位置とに基づき、決定され得る。
【0007】
上述のメッセージは、モバイルまたは固定プラットフォームのローカルクロックを基準デバイスのタイミングに同期させるためにも用いられ得る。1つのアプローチに従うと、空中の航空機から送信されたADS−Bメッセージは、ローカルクロックと共に配置されたSBS受信器において受信される。受信器は、ADS−Bメッセージの受信の時間を決定し、ADS−Bメッセージの送信の時間は、ADS−Bメッセージに含まれる情報、または後続のメッセージに含まれる情報から決定される。次いで、ローカルクロックがADS−Bメッセージの送信の時間および受信の時間に基づき、送信航空機のタイミングに同期される。例えば、この技術は、GPSが一時的に利用不能な場合に、金融機関のクロックを正確な基準に同期させるために用いられ得る。
【0008】
本発明の上述の特徴、さらなる特徴および利点は、以下の規定、記載、およびその特定の実施形態の説明的図を考慮すると明らかとなる。さまざまな図における類似の参照数字は、類似の構成要素を指定するために使用される。これらの記載は、発明の具体的詳細に踏み込むが、変形例が存在し得、変形例は、本明細書における記載に基づき、当業者に明らかであることを理解されたい。
【0009】
例えば、本発明は以下の項目を提供する。
(項目1)
モバイルデバイスの位置を決定する方法であって、
該方法は、
該モバイルデバイスにおいて、複数のメッセージを複数のモバイル基準デバイスのそれぞれから受信することであって、放送される該メッセージの各々は、基準時間に対して既知のタイミングを有している複数のメッセージ開始適用(MSO)時刻のうちの1つで始まり、該メッセージの各々は、該メッセージを送信する該モバイル基準デバイスに対する位置情報と、該メッセージの送信が開始される該MSO時刻を示すMSO値とを含む、ことと、
該モバイルデバイスにおいて受信されるメッセージの各々の受信の時間を決定することと、
該モバイルデバイスにおいて受信されるメッセージの各々の送信の時間を決定するために、該MSO値を用いることと、
該メッセージの送信の時間および受信の時間と、該モバイル基準デバイスに対する位置情報とに基づいて該モバイルデバイスの位置を多辺測量により、決定することと
を含む、方法。
(項目2)
前記メッセージは、それぞれの空中の航空機から受信される、上記項目のうちのいずれかに記載の方法。
(項目3)
前記複数のメッセージの各々は、放送型自動従属監視(ADS−B)メッセージであり、該ADS−Bメッセージは、該ADS−Bメッセージを送信するADS−Bを備えたモバイルプラットフォームに対する前記MSO値ならびに緯度、経度および高度情報を含む、上記項目のうちのいずれかに記載の方法。
(項目4)
前記モバイルデバイスから、前記メッセージから決定された該モバイルデバイスの位置を放送することをさらに含む、上記項目のうちのいずれかに記載の方法。
(項目5)
前記送信の時間は、協定世界時(UTC)エポックに対して決定される、上記項目のうちのいずれかに記載の方法。
(項目6)
モバイルプラットフォーム上に配置されたプロセッサを含む装置であって、該プロセッサは、複数のメッセージを複数のモバイル基準デバイスのそれぞれから受信するように構成されており、放送される該メッセージの各々は、基準時間に対して既知のタイミングを有している複数のメッセージ開始適用(MSO)時刻のうちの1つで始まり、該メッセージの各々は、該メッセージを送信する該モバイル基準デバイスに対する位置情報と、該メッセージの送信が開始される該MSO時刻を示すMSO値とを含み、該プロセッサは、
該モバイルプラットフォームにおいて受信される該メッセージの各々の送信の時間を決定することであって、該送信の時間は、該MSO値から決定される、ことと、
該メッセージの各々の送信の時間および受信の時間と該モバイル基準デバイスに対する位置情報とに基づいて該モバイルプラットフォームの位置を多辺測量により、決定することと
を行うように構成されている、装置。
(項目7)
前記プロセッサは、空中の航空機から受信される複数のメッセージの各々の送信の時間を決定するように構成されている、上記項目のうちのいずれかに記載の装置。
(項目8)
前記プロセッサは、
放送型自動従属監視(ADS−B)を備えた複数のモバイルプラットフォームのそれぞれから受信された複数のADS−Bメッセージの各々の送信の時間を決定することであって、各ADS−Bメッセージの送信の時間は、各ADS−Bメッセージの中に含まれる前記MSO値から決定される、ことと、
該ADS−Bメッセージに含まれる位置情報に基づいて該モバイルプラットフォームの位置を決定することと
を行うように構成されている、上記項目のうちのいずれかに記載の装置。
(項目9)
前記プロセッサは、放送のために、前記モバイルデバイスの位置を送信器システムに供給するようにさらに構成されている、上記項目のうちのいずれかに記載の装置。
(項目10)
前記プロセッサは、前記送信の時間を協定世界時(UTC)エポックに対して決定するように構成されている、上記項目のうちのいずれかに記載の装置。
(項目11)
ソフトウェアによって符号化される1つ以上のコンピュータ読み取り可能格納媒体であって、該1つ以上のコンピュータ読み取り可能格納媒体は、コンピュータ実行可能命令を含み、該コンピュータ実行可能命令は、該ソフトウェアが実行された場合に、
モバイルプラットフォームにおいて、複数のモバイル基準デバイスのそれぞれから受信される複数のメッセージの各々の送信の時間を決定することであって、放送される該メッセージの各々は、基準時間に対して既知のタイミングを有している複数のメッセージ開始適用(MSO)時刻のうちの1つにおいて始まり、該メッセージの各々は、該メッセージを送信する該モバイル基準デバイスに対する位置情報と、該メッセージの送信が開始される該MSO時刻を示すMSO値とを含む、ことと
該メッセージの各々の送信の時間および受信の時間と該モバイル基準デバイスに対する位置情報とに基づいて該モバイルプラットフォームの位置を多辺測量により、決定することと
を行うように動作可能である、コンピュータ読み取り可能格納媒体。
(項目12)
前記送信の時間を決定するように動作可能である前記命令は、空中の航空機から受信されるメッセージの送信の時間を決定するように動作可能である命令を含む、上記項目のうちのいずれかに記載のコンピュータ読み取り可能格納媒体。
(項目13)
前記送信の時間を決定するように動作可能である前記命令は、複数の放送型自動従属監視(ADS−B)メッセージの各々の送信の時間を決定するように動作可能である命令を含み、該ADS−Bメッセージは、ADS−Bを備えた複数のモバイルプラットフォームのそれぞれから受信され、各ADS−Bメッセージの送信の時間は、各ADS−Bメッセージの中に含まれる前記MSO値から決定され、
前記モバイルプラットフォームの位置を決定するように動作可能な前記命令は、該ADS−Bメッセージに含まれる位置情報に基づいて多辺測量を行うように動作可能である命令を含む、上記項目のうちのいずれかに記載のコンピュータ読み取り可能格納媒体。
(項目14)
放送のために、前記モバイルデバイスの位置を送信器システムに供給するように動作可能な命令をさらに含む、上記項目のうちのいずれかに記載のコンピュータ読み取り可能格納媒体。
(項目15)
前記送信の時間を決定するように動作可能な前記命令は、該送信の時間を協定世界時(UTC)エポックに対して決定するように動作可能である命令を含む、上記項目のうちのいずれかに記載のコンピュータ読み取り可能格納媒体。
(項目16)
モバイルデバイスの位置を決定する方法であって、
該方法は、
該モバイルデバイスにおいて、複数の放送型自動従属監視(ADS−B)メッセージを複数のモバイルADS−B放送デバイスのそれぞれから受信することと、
該モバイルデバイスにおいて受信される該ADS−Bメッセージの各々の受信の時間を決定することと、
該モバイルデバイスにおいて受信される該ADS−Bメッセージの各々の送信の時間を、該ADS−Bメッセージの各々のフィールドまたはそれぞれの後続のメッセージのフィールド内に含まれる情報から決定することと、
該ADS−Bメッセージの送信の時間および受信の時間と、該モバイルデバイスにおいて受信される該ADS−Bメッセージに含まれる前記モバイルADS−B放送デバイスに対する位置情報とに基づいて該モバイルデバイスの位置を多辺測量により、決定することと
を含む、方法。
(項目17)
前記ADS−Bメッセージは、空中の航空機から送信される、上記項目のうちのいずれかに記載の方法。
(項目18)
前記ADS−Bメッセージの各々の送信の時間を前記それぞれの後続のメッセージを介して受信することをさらに含み、該それぞれの後続のメッセージは、それぞれのADS−Bメッセージの送信の時間を含むように再構成されている航空機IDおよびカテゴリー(ACID)メッセージを含む、上記項目のうちのいずれかに記載の方法。
(項目19)
前記モバイルデバイスから、前記ADS−Bメッセージから決定される該モバイルデバイスの位置を放送することをさらに含む、上記項目のうちのいずれかに記載の方法。
(項目20)
前記モバイルデバイスにおいて受信される前記ADS−Bメッセージの各々の送信の時間は、無作為化されている、上記項目のうちのいずれかに記載の方法。
(項目21)
ローカルクロックをモバイル基準デバイスのタイミングに同期させる方法であって、
該方法は、
放送型自動従属監視(ADS−B)メッセージを、該ローカルクロックと共に配置されたADS−B受信器において受信することであって、該ADS−Bメッセージは、該モバイル基準デバイスから送信される、ことと、
該ADS−B受信器において受信される該ADS−Bメッセージの受信の時間を決定することと、
該ADS−Bメッセージの送信の時間を、該ADS−Bメッセージに含まれる情報または後続のメッセージに含まれる情報から決定することと、
該ADS−Bメッセージの送信の時間および受信の時間に基づいて該ローカルクロックをモバイル基準デバイスのタイミングに同期させることと
を含む、方法。
(項目22)
前記ADS−Bメッセージは、空中の航空機から受信される、上記項目のうちのいずれかに記載の方法。
(項目23)
前記ADS−Bメッセージは、メッセージ開始適用(MSO)値を含むADS−Bメッセージであり、該ADS−Bメッセージの送信の時間は、該MSO値から決定される、上記項目のうちのいずれかに記載の方法。
(項目24)
前記ADS−Bメッセージは、1090ESプロトコル下で送信される、上記項目のうちのいずれかに記載の方法。
(項目25)
前記ADS−Bメッセージの送信の時間は、後続のメッセージにおいて受信される、上記項目のうちのいずれかに記載の方法。
【0010】
(摘要)
モバイルデバイスの位置を決定する技術は、メッセージをそれぞれのモバイル基準デバイスから受信することを含む。放送されるメッセージの各々は、基準時間に対して既知のタイミングを有している複数の所定のメッセージ開始適用(MSO)時刻のうちの1つで始まる。メッセージの各々は、メッセージの送信が開始されたMSO時刻を識別するMSO値を含む。MSO値は、モバイルデバイスにおいて受信されたメッセージの各々の送信の時間を決定するために用いられる。モバイルデバイスの位置は、多辺測量によって決定される。別のアプローチに従うと、モバイルデバイスは、ADS−Bメッセージのセットをモバイル基準デバイスのそれぞれのセットから受信する。ADS−Bメッセージの各々
の送信の時間は、ADS−Bメッセージ自体、または後続のメッセージにおいて供給され、モバイルデバイスの位置を決定するために用いられる。
【図面の簡単な説明】
【0011】
【図1】図1は、監視および放送サービス(SBS)システムの最上位レベルのブロック図であり、SBSシステムは、SBSシステムがインターフェース接続するシステムとの関連で示される。
【図2】図2は、SBS地上ラジオ局とADS−Bを備えた航空機との間のデータフローを概念的に例示する図である。
【図3】図3は、位置決定をサポートするための、複数の放送航空機からの空対空のクロスリンクメッセージの受信航空機による受信を概念的に例示する図である。
【図4】図4は、SBS測位システムのブロック図であり、SBS測位システムは、位置を決定するために、ADS−B送信器/受信器システムおよびGPS受信器/ナビゲーションシステムに結合される。
【図5】図5は、モバイルデバイスによって、その位置を複数のモバイルADS−B放送デバイスから受信されるメッセージから決定するために行われる動作の機能的なフローチャートである。
【図6】図6は、1秒UTC時間フレームの関連内のADS−Bメッセージに対するメッセージ開始適用を示す図である。
【図7】図7は、1090ESプロトコル内の1秒UTC時間フレームの区分を示す図である。
【図8】図8は、送信の時間を伝達する航空機IDおよびカテゴリー(ACID)メッセージの再利用を示す図である。
【図9】図9は、1090ESプロトコル下でADS−Bメッセージを用いて、位置決定を実装するためのメッセージのシーケンスを示すタイミング図である。
【図10】図10は、モバイルデバイスによって、その位置をモバイルADS−B放送デバイスによって放送されたADS−Bメッセージから決定するために行われる動作を要約する機能的なフローチャートである。
【図11】図11は、受信器デバイスによって、ローカルクロックをモバイル基準デバイスとして機能するモバイルADS−B放送デバイスに同期させるために行われる動作を要約する機能的なフローチャートである。
【発明を実施するための形態】
【0012】
(詳細な説明)
受信器において位置およびタイミングを決定する技術が本明細書において記載される。受信器は、1つ以上のモバイルソース送信器から放送信号を受信する。モバイルソース送信器は、自身の位置およびタイミングを信頼性を有して知っている。1つのアプローチに従うと、従来から航空機産業をサポートしている既存および僅かに改変された放送型自動従属監視(ADS−B)送信が空中、海上および地上ベースのプラットフォームにナビゲーションおよびタイミングソリューションを提供するために採用され得る。
【0013】
監視および放送サービス(Surveillance and Broadcast Services)(SBS)システムは、航空管制およびナビゲーションをサポートし、種々のサービスをADS−Bを備えた航空機に提供するように設計されている。National Airspace System(NAS)には、2つの適用可能なADS−Bリンク技術が存在する。Mode−S技術の拡張である1090 Extended
Squitter(1090ES)と、より新しい技術であるUniversal Access Tranceiver(UAT)とである。1090ES技術では、1090ES航空電子機器が1090MHzでメッセージを周期的に放送する。メッセージは、その識別(24ビットアドレス)、目標状態ベクトル(位置、速度)および他の航空機の
状態情報を提供する。UAT技術では、UAT航空電子機器が978MHzで、その識別、目標状態ベクトルおよび他の状態情報を提供するメッセージを周期的に放送する。1090ESは、主に高い高度の商業用航空機に適合され、世界規模で用いられているが、UATは、商業用航空機よりも低い高度で飛ぶ傾向のある、ジェネラルアビエーション(GA)航空機向けに市場取引される。
【0014】
図1は、SBSシステムを例示し、SBSシステムは、SBSシステムがインターフェース接続するシステムとの関連で例示されている。米国におけるSBSシステムは、現在、約800の地上ラジオ局を含んでおり、それらは、無線インターフェース(ワイヤレス)を介して、アップリンクとダウンリンクとの両方のカバレッジを、領空にいるADS−Bを備えた全ての航空機に提供する。SBS地上ラジオ局(本明細書においては、単に「地上局」とも呼ばれる)は、例えば、遠距離通信塔などに位置決めされ得る。数多くの中央および地方管制局が、ADS−B目標報告を供給するFAAサービス提供点(SDP)からのADS−B報告と、レーダーおよび他のセンサーからの目標データを供給するFAA SDPからのレーダー/センサー報告と、気象および航空データソースによって供給された気象/航空データと、FAAがサービスプロバイダーの状態をSBSシステムを介して、独立して監視することを可能にする他のデータとの処理に責任を負う。SBSシステムは、全てのデータソース(目標、気象および航空)とデータ処理管制局とエンドユーザーとの間に接続性を提供する通信ネットワークをさらに含む。
【0015】
図2は、SBSシステムにおいて放送されるメッセージのタイプの全体的な概観を提供する。ADS−Bサービスは、監視情報を、航空管制のために、地上システムに提供するADS−Bを備えた航空機から、航空機の状況認識における使用のために、同様のものを備えた航空機への送信を用いる。図2は、航空機によって放送されるADS−Bメッセージが他の航空機(空対空のクロスリンク)およびSBS地上局(空対地上)によって受信されることを例示する。ADS−B INを備えた航空機は、ADS−B送信を、同じリンク技術を備えた他の航空機へ送信、および他の航空機から受信する能力を有している(つまり、UATを備えた航空機は、互いに通信することができ、1090ESを備えた航空機は、互いに通信することができる)。
【0016】
従来から、航空機は、GPS、または機内の内部ナビゲーションシステム(INS)のような他のソースを用いて、地球のWorld Geodetic System(WGS)84モデル(例えば、緯度、経度および高度)との関連で自身の位置を決定する。航空機の状態ベクトルは、他の航空機および地上局への放送のためにADS−Bメッセージに符号化される。1090ESリンクの場合には、ADS−B送信は、実際は、一連の別個のメッセージ(例えば、位置メッセージ、速度メッセージなど)である。UATでは、ADS−Bメッセージは、要求された状態ベクトル情報を含む複数のフィールドを有している単一のパケットであり得る。
【0017】
これらのADS−Bメッセージは、ラジオ送信の範囲内の航空機に関する位置情報を航空機内のアプリケーションに提供する。該位置情報は、フライトクルーに、監視情報および監視ベースのガイダンスおよび警報を直接提供し得る航空機監視および分離保障アプリケーションをサポートする。SBSシステムの地上局は、また、航空機によって放送されたADS−Bメッセージを受信し、航空機位置情報を地上管制局へ中継する。地上管制局は、情報を処理し、妥当性チェックを行い、監視情報の低待ち時間フィードを、分離保障および他の航空管制サービスにおける使用に指定されたFAA SDPに提供する。より詳細に下に記載されるが、ビーコン様ADS−Bメッセージも、地上ベースの障害物のような航空機以外のプラットフォームによって送信されることがあり得、航空機に警報する。
【0018】
再び図2を参照すると、SBSシステムの地上局は、また、アップリンクメッセージを範囲内の航空機に放送する。再放送型自動従属監視(Automatic Dependent Surveillance−Rebroadcast)(ADS−R)は、本質的に、1つのリンク技術を用いる航空機によって、互換性を有さないリンク技術を用いる近くの航空機へ送信されたADS−B情報の再送信または中継である。例えば、UATおよび1090ESリンクをそれぞれ用いる第一および第二の航空機が同じ周辺にある場合に、UAT ADS−Bメッセージを第一の航空機から受信するSBS地上局は、1090ES互換ADS−Rメッセージで、そのメッセージの内容を再放送し得る。1090ES互換ADS−Rメッセージが第二の航空機(その逆も同様)によって受信され得ることによって、航空機が互いの位置情報を受信することを可能にする。
【0019】
ADS−Bを備えた航空機にADS−Bを備えていない航空機に対する監視情報を提供する放送型交通情報サービス(TIS−B)メッセージを、地上局は、また、レーダー、ASDE−Xおよび多辺測量システム(multi−lateration system)のようなソースから送信する。
【0020】
地上局は、航空機に地上ベースの障害物などを警報するように設計されているADS−Bメッセージのタイプである「ビーコン」ADS−Bメッセージを送信するようにも構成され得る。
【0021】
UATリンクを採用して、SBS地上局によって航空機に放送される別のアップリンクメッセージは、放送型フライト情報サービス(FIS−B)メッセージであり、これは、気象、航空データおよび飛行士への通知(NoTAMS)のような一般的な情報を伝達することによって、フライトに影響し得る地方天候および航空システム変更の情報を時宜よく提供するために用いられる。
【0022】
UATリンクプロトコル内では、隣り合う航空機間のコンテンションを回避するために、ADS−Bメッセージは、特定の航空機が、メッセージ開始適用(MSO)と呼ばれる時間のある離散点で始まるメッセージを放送する、同期され、時間区分されたフレームワーク内で放送される。各ADS−Bメッセージは、送信航空機の緯度、経度、高度、および送信の時間が決定され得るMSO値を含む。発明の一局面に従うと、空中の航空機のようなモバイルプラットフォームから送信されたADS−Bメッセージは、ナビゲーションソリューションを航空機および他のモバイルプラットフォームに提供するために用いられ得る。図3に概念的に示されるように、ADS−B送信器を備えた航空機または他のプラットフォームは、複数の航空機から受信される空対空のクロスリンクADS−Bメッセージを採用する。UATおよび1090ESプロトコルが顕著に異なるので、航空機またはADS−Bを備えた他のモバイルプラットフォームからのメッセージセットを既存のADS−Bおよび僅かに改変されたADS−Bを用いて、位置を決定するために、異なる実装が採用され得る。航空機SBS測位システム(SPS)可能航空電子機器は、これらのメッセージセットを受信し、多辺測量アルゴリズム(GPSと共に用いられるものに類似する)およびKalmanフィルタリングなどに基づき、状態ベクトルナビゲーションソリューションを形成する。ナビゲーションソリューションの精度値(例えば、ナビゲーション一体性カテゴリー(NIC)、ナビゲーション精度カテゴリー(NAC)およびソース一体性レベル(SIL))も計算され得る。任意で、これらの精度値は、アップリンクされたメッセージから決定されたナビゲーションソリューションが、現在のGPSナビゲーションソリューションよりも優れたまたは劣った正確性を有しているか否か、および、より優れた精密なナビゲーションソリューションが保持され得るかを決定するために用いられ得る。SPS航空電子機器は、選択されたナビゲーションソリューションを、ADS−Bメッセージを介して放送される航空機データバスにフィードバックする。ADS−Bメッセージは、地上局および他の航空機によって受信され得ることによって、地上および空
中での監視を維持する。
【0023】
図4は、自身の位置をADS−Bを備えたモバイルデバイスのセット(例えば、空中の航空機)から受信された空対空のクロスリンクADS−Bメッセージから自身の位置を決定する能力を有しているSBS測位システム(SPS)402のブロック図である。SBS測位システム402は、ADS−B送信器/受信器(トランシーバー)システム404およびGPS受信器/ナビゲーションシステム406に結合される。SBS測位システム402は、図4において、プロセッサモジュール408によって表される処理能力を含む。プロセッサ408は、さまざまな動作およびタスクを行うプログラム命令(つまり、ソフトウェア)を実行する能力を有している。例えば、プロセッサ408は、ABS−B送信器/受信器システム404およびGPS受信器/ナビゲーションシステム406から受信されたデータおよびコマンドを解釈することができ、計算を行うことができ、情報を格納させ得る。例えば、プロセッサ408は、マイクロプロセッサ、マイクロコントローラー、デジタルシグナルプロセッサなどである。
【0024】
SBS測位システム410の格納能力は、格納/メモリモジュール410によって表され、格納/メモリモジュール410は、ADS−B送信器/受信器システム404およびGPS受信器システム406によって供給されたメッセージおよびメッセージ情報に関する情報ならびに計算の結果および他のデータまたは情報を格納し得る。格納/メモリモジュール410は、動作を行うためにプロセッサ408によって実行されるプログラム命令(つまり、ソフトウェア)も格納し得る。したがって、本明細書において記載される動作および方法は、SBS測位システム402内に設けられた単数または複数のプロセッサ上のコンピュータ読み取り可能媒体(つまり、ソフトウェア)に格納された命令を実行することによって行われ得る。本明細書において用いられる場合、「コンピュータ読み取り可能媒体」という用語は、「非一時的」または有形媒体(例えば、メモリまたは格納デバイス)を指す。格納/メモリモジュール410は、非一時的なプロセッサ読み取り可能またはコンピュータ読み取り可能メモリである。非一時的なプロセッサ読み取り可能またはコンピュータ読み取り可能メモリは、プロセッサ408によって実行された場合に、プロセッサ408に本明細書において記載される機能を行わせる命令を格納するか、または命令によって符号化される。図4は、格納/メモリモジュール410に格納されたソフトウェアを実行するデータプロセッサ408を含む処理環境を示すが、代替の処理環境は、固定されたハードウェア論理を通して、論理の機能を行うように構成されている特定用途向け集積回路(ASIC)のような固定されたデータ処理素子である。さらに別の可能なデータ処理環境は、1つ以上のフィールドプログラマブル論理デバイス、ファームウェア、もしくは固定された処理素子、ファームウェアおよび/またはプログラマブル論理デバイスの組み合わせを含むものである。
【0025】
図4において、SBS測位システム402がADS−B送信器/受信器システム404とは別個のシステムとして概念的に示されている。任意で、SBS測位システム402によって表される能力は、例えば、ソフトウェアアップグレードまたはアプリケーションとして、ADS−B IN航空電子機器(つまり、図4におけるADS−B送信器/受信器システム404)に一体化され得る。
【0026】
図5において示されるフローチャートは、例えば、UATプロトコルの時分割多重化スキームのメッセージを用いて、航空機または別のモバイルプラットフォームまたはデバイスの位置を決定するために採用される技術を要約する。ここで、ADS−Bを備えた航空機のようなモバイル基準デバイスのセットから受信されたメッセージは、信頼できる送信器の位置情報およびMSO値を含む。
【0027】
動作500において、モバイルデバイスは、複数のメッセージを複数のモバイル基準デ
バイスのそれぞれから受信する。本明細書において用いられた場合は、モバイルデバイスは、位置メッセージを送信または受信する能力を有している任意のデバイスをであり、空中の航空電子機器システム、海上のナビゲーションシステム、地上の乗り物に搭載されたナビゲーションシステム、およびハンドヘルドまたは身体搭載デバイスのようなポータブルナビゲーションデバイスを含む。メッセージの各々は、基準時間に対して既知のタイミングを有しているあるMSO時刻で始まり、放送される。メッセージの各々は、放送基準デバイスに関する位置情報も含む。
【0028】
例えば、一般の航空電子機器航空機を目標にしたUATプロトコルで、ADS−Bメッセージが航空機から放送され、航空機の現在の位置のような情報を伝達する。送信航空機のセットからの既存のADS−Bメッセージを処理することによって、受信航空機または他のUATを備えたプラットフォームは、自身のナビゲーションソリューション(位置)を決定し得る。図4に示される例において、オンボードADS−Bトランシーバーシステム404は、ADS−Bメッセージを受信し、位置決定処理のために、そのADS−BメッセージをSBS測位システム402に供給する。
【0029】
UATを備えた航空機によって受信されるADS−Bメッセージは、特定の規則によって送信される。各航空機は、メッセージ開始適用(MSO)と呼ばれる、周期的なある離散的な瞬間で、一定程度正確に始まるADS−Bメッセージを送信するために要求される。特に、航空機は、協定世界時(UTC)に同期され、1秒時間フレームに従い、信号通知が計画される。図6において示されるように、1秒UTC時間フレームのUAT時間分割は、送信が許可されない6ms保護帯域で始まり、176ms地上アップリンク区分が続く。次いで、12ms保護帯域は、地上アップリンク区分を800msADS−B時間区分から分離させ、1秒UTCフレームの終わりに、最後の6ms保護帯域が続く。FIS−Bメッセージは、アップリンク時間区分中にSBS地上局によって送信されるが、ADS−B時間区分は、TIS−BおよびADS−RをアップリンクするSBS地上局と、ADS−Bメッセージを他の航空機およびSBS地上局に放送する航空機によって用いられる。地理的な領域送信内のADS−Bを備えた航空機は、800msADS−B区分内の異なるMSOで無作為に始まる。しかし、MSOは、UTC秒内に固定され、送信される「長い」UATメッセージ内で符号化されるので、送信の時間は受信の際に、符号化されたMSO値から絶対的に決定され得る。
【0030】
800msADS−B区分は、3200個のMSO時刻瞬間に分割される。各々は、250μsの間隔を有している。各MSOは、「長い」UATメッセージで符号化される(12ビットMSOの6つのLSBがメッセージで符号化され、6つのMSBは、受信サブシステムによって、概算的に決定され得る)。各MSOは、1秒UTC時間フレーム(つまり、UTCエポック)の始まりに対する特定のタイミングを示す。例えば、「2376」のMSOは、フレームの始まりに対応するUTC0秒時間エポック(この例は、フレームにおける第一のMSO値が「0」を付されると想定する)後の600msにおける(2376×0.25ms+6ms(最初の保護帯域))MSOに対応する。
【0031】
RTCA DO−282Bセクション2.2.4において特定されるように、UAT ADS−Bメッセージは、種々の情報を含む。例えば、3つのフィールドは、それぞれ、送信航空機の緯度、経度および高度を含む。さらに、UATプロトコル下では、各ADS−Bメッセージは、そのメッセージに適用されるMSO値を含むフィールドを含む。UTC期間からUTC期間までに、特定の航空機のMSO値が変わることに注意されたい。しかし、個別のADS−Bメッセージの送信の時間は、UTC時間エポックに対して、ADS−Bメッセージに含まれるMSO情報に基づき、決定され得る。
【0032】
再び図5を参照すると、動作510において、メッセージの各々が受信された際に、モ
バイルデバイスは、メッセージの受信の時間を決定する。送信された信号の到着の時間を精密に決定する技術は周知であり、種々の技術のいずれかが、各信号の受信の時間を決定するモバイルデバイスによって採用され得る。図4に示される例において、ADS−Bトランシーバーシステム404は、範囲内の航空機から到着するADS−Bメッセージの受信の時間を決定し得る。
【0033】
動作520において、モバイルデバイスにおいて受信されたメッセージの各々の送信の時間(TOT)は、メッセージ自体内に含まれるMSO値から決定され得る。UATプロトコルの下で放送されたADS−Bメッセージの場合は、UTC時間フレームのADS−B区分における各MSO値の間隔は既知(つまり、250μs)である。したがって、UTC時間フレームの始まりに対する送信の時間は、MSO値をMSO間隔によって乗算し、先行する保護帯域を占めることによって決定され得る。再び図4を参照すると、ADS−Bメッセージの受信の際に、ADS−Bトランシーバーシステム404は、メッセージのフィールドに含まれるMSO値を識別し(例えば、図6に示された例においては、MSO値=2376)、MSO値をさらなる処理のために、SBS測位システム402に供給する。MSO値は、連続的であり、各MSOは、既知の間隔を有しているので、2376のMSO値は、先に記載したように、時間フレームの開始の600ms後に始まる。したがって、SBS測位システム402は、ADS−Bメッセージの送信の時間をADS−Bメッセージ含まれるMSO値から決定し得る。
【0034】
動作530において、モバイルデバイスは、メッセージの送信の時間および受信の時間と、受信されたメッセージにおいて、モバイルデバイスに報告されるモバイル基準デバイスの位置とに基づいて自身の位置を多辺測量により決定する。図4に示される例において、放送航空機の位置は、ADS−Bメッセージにおいて符号化された緯度、経度および高度情報を介してADS−Bトランシーバー404に供給され、この情報は、SBS測位システム402へ転送される。受信航空機の場合は、航空機は、その高度を大気圧を測定する機内機器から信頼性を有して、知ることができる。
【0035】
モバイル基準デバイス(例えば、ADS−Bを備えた送信航空機)およびモバイルデバイス(例えば、ADS−Bトランシーバーシステム404およびSBS測位システム402)は、UTC時間に同期されているので、メッセージ(例えば、ADS−Bメッセージ)のフライトの時間は、送信の時間と受信の時間との間の差異として決定され得る。次いで、各モバイル基準デバイスから受信モバイルデバイスまでの距離が、メッセージ信号のフライトの時間を光の速さによって乗算することによって決定され得る。送信の時間は、クロスリンクメッセージに含まれるMSO値からのみによって、確実に決定され得ることに注意されたい。したがって、受信デバイスが、任意のメッセージおける送信情報の時間を実際に受信せずに、送信の時間を決定することを可能にするUAT放送プロトコルの時間区分された性質を技術は利用する。むしろ、標準的なUAT ADS−Bメッセージに既に提供されているMSO値は、受信器が送信の時間を精密に決定することを可能にするのに十分である。
【0036】
SBS測位システム402は、多辺測量を用いて、ナビゲーションソリューション(つまり、プラットフォームの位置)を決定するために、受信された位置情報と、送信および受信の時間から決定された各送信航空機へのフライト(無線での信号伝搬)の距離または時間とを用いる。一般的には、少なくとも3つまたは4つの送信モバイルデバイスからの放送信号の受信が最初の位置ソリューションを発展させるために、1秒時間フレームにおいて要求される。
【0037】
受信されたADS−Bメッセージの各セットから瞬間位置測定を計算することに加えて、SBS測位システム402は、Kalmanフィルタリングまたは他のフィルタリング
または追跡アルゴリズムを用いて、GPS受信器システムに類似する態様で、状態ベクトルナビゲーションソリューションを形成することによって、時間にわたり、位置を追跡し得る。前記のナビゲーションソリューションの品質/精度値(NIC、NACおよびSIL)もRTCA規格毎に計算され得る。
【0038】
SBS測位システム402は、また、GPS受信器システム406から、状態ベクトルの形態でナビゲーションソリューションを精度値と共に受信する。GPSデータが一時的に利用不能になった場合は、SBS測位システム402がGPSナビゲーションソリューションをADS−Bナビゲーションソリューションで代用し得、それによって、ナビゲーションデータの信頼できるバックアップソースをADS−Bシステム内に提供する。
【0039】
任意で、品質値を用いて、SBS測位システム402は、ADS−Bメッセージから決定されたナビゲーションソリューションの精度を現在のGPSナビゲーションソリューションの精度に比較し得、2つのナビゲーションソリューションのうちのより正確な方を放送のために選択し得る。次いで、SPS測位システム402は、選択されたナビゲーションソリューションを、ADS−Bメッセージを介して放送されるADS−Bトランシーバーシステム404への航空機データバスにフィードバックする。ADS−Bメッセージは、SBS地上局および他の航空機によって受信され得、地上および空中での監視を維持する。
【0040】
したがって、一実装に従うと、SBS測位システム402は、時間エポックに対するADS−Bメッセージの送信の時間(TOT)(例えば、1秒UTC時間インターバルの始まりから経過した時間)を決定するために、受信されたADS−BメッセージのMSO値を用い得る。システムは、ADS−Bを備えた送信モバイルプラットフォームから、受信の時間とTOTとの間の経過した時間に基づき、その距離を決定し得る。各送信ADS−Bモバイルプラットフォームの場所は既知なので、受信器は、その位置を多辺測量を介して、モバイルプラットフォームのセットから送られたADS−Bメッセージから利用可能な情報を用いて、決定し得る。したがって、ADS−Bメッセージは、UAT受信器を備えたモバイルプラットフォーム(航空機、船舶、地上など)において受信され得ると想定し、モバイルプラットフォームは、ADS−Bを備えた一群の送信モバイルプラットフォーム(例えば、航空機)から受信されたADS−Bメッセージに存在するMSO値および緯度、経度および高度情報を用いることによって、その位置を決定し得る。UATソリューションは、モバイルデバイスの位置を決定するために、ADS−B送信機器に対して変更を要求せず、既存のメッセージから利用可能な情報を利用する。
【0041】
先述の実装は、UAT航空電子機器を備えた航空機に関連して記載されたが、位置決定技術は、ADS−Bメッセージを受信するために備えられた任意のモバイルデバイスと共に用いられ得、船舶、地上の乗り物ならびにハンドヘルドまたは身体搭載デバイスを含むことが認識される。さらに、記載された実装は、UATプロトコル内のソリューションを含むが、送信の時間を伝達するためにMSO値を用いるという概念は、任意の時間スロットまたは時間区分されたプロトコルで採用され得、それによって、他の信号通知プロトコル内の類似するソリューションをサポートする。
【0042】
1090ESプロトコルは、ある観点では、UATプロトコルと著しく異なる。1090ESは、識別可能なMSOを有する時間スロットシステムに基づかず、その結果、ADS−Bメッセージは、送信時間を精密に示すいずれの情報も含まない。したがって、別の信号通知機構が、1090ESプロトコルを用いて、航空機または他のプラットフォームと通信する空中の航空機からの空対空のクロスリンクメッセージに頼る位置決定スキームをサポートするように適合されなければならない。
【0043】
UTC同期1090ES送信器に対して、1秒UTC時間フレームが200msecインターバルに分割され、図7に示されるように、200ms毎に識別可能な時間エポックが生じる。これらのエポックは、代替的に「奇数」および「偶数」指定が割り当てられる。これらのエポックの各々は、ADS−Bメッセージに含まれる情報に対して適用可能な時間として機能し得る。例えば、メッセージを準備している従来のUTC結合1090ES航空機は、メッセージを時宜よい態様で送信器に搬送するために、さまざまなメッセージ占有活動を100ms時間期間内に行うことを要求される。メッセージで送信される航空機位置情報が時間の識別可能な点に関連付けられ得るように、航空機の航空電子機器は、最も近い200msecエポックに自身のナビゲーションソリューション(例えば、緯度、経度)を推定し、位置情報に対して有意な適用可能な時間を提供する。
【0044】
ADS−Bメッセージを受信する航空機または地上局は、適用可能な時間を最も近い200msecエポックとして、ADS−Bメッセージが受信された時間に基づき識別し得る。ADS−Bメッセージのフライトの時間が200ms未満であり、適用可能な時間として用いられたエポックは、「奇数」または「偶数」エポックであったかを示すビットをADS−Bメッセージが含む場合には、正しいエポックに関して受信器に曖昧さは存在しない。その結果、受信器エンドにおいて、ADS−Bメッセージは、送信器に関して優れた位置精度を提供する。なぜなら、メッセージは、送信器位置と、その位置が適用可能な瞬間との両方を特定するからである。
【0045】
しかし、受信の時間は、受信器がADS−Bメッセージに含まれる情報に関連付けられた適用可能な時間を決定することを可能にするが、受信器がADS−Bメッセージの送信の時間を決定することを可能にはしない。1090ESプロトコルは、頻繁な信号コンテンションを回避し、放送デバイス間の衝突を減少させるために、メッセージの送信時間を無作為化することを含み、それによって、送信の時間が顕著に不確かになる。結果として、1090ESプロトコルでは、ADS−Bメッセージの送信の時間は、レンジング、位置決定または時間同期をサポートするために十分な精度をもって、受信器において知られ得ない。この送信アプローチは、送信の時間を受信デバイスに報告する際の難問を示す。受信デバイスは、フライトの時間/距離を計算し、受信されたメッセージからナビゲーションソリューションを発展させるために送信の時間を要求する。したがって、標準的なビーコンADS−Bメッセージスキームに対するいくつかの改変が位置決定をサポートするために要求される。
【0046】
ADS−Bメッセージの送信の時間を1090ESプロトコルの受信航空電子機器に伝達する1つの選択肢は、送信の時間を追従メッセージのADS−Bメッセージ自体に符号化することである。このことは、既存の1090ESスキームに対して実質的に透明な数多くの方法によって達成され得る。送信の時間をADS−Bメッセージ自体に符号化するアプローチは、送信の時間はメッセージが生成されたときに既知であることを想定する。これは、現在の1090ESプロトコルでは一般的に真実ではない。別の選択肢は、送信器サブシステム(この場合は、送信モバイルプラットフォーム)から位置メッセージの送信の時間を決定することであり、次いで、送信の時間を受信航空電子機器に、後続のメッセージで供給することである。そのようなスキームは、1090ESでのADS−Bの一式のメッセージ内では特定のタイプのメッセージである航空機IDおよびカテゴリー(ACID)メッセージを用いることによって、実装され得る。
【0047】
航空機間の空対空のクロスリンク通信において意図された態様で用いられた場合は、ACIDメッセージが航空機間の分離を維持するために採用される。位置決定のために、受信エンドにおいて用いられるADS−Bメッセージに関連して、ACIDメッセージは、先行するADS−Bメッセージの送信の時間を伝達するために再利用され得る。図8において示され、RTCA DO−260Bセクション2.2.3.2.5において特定され
るように、ACIDメッセージの「ME」ペイロードフィールドは、タイプコードおよびサブタイプコードから成るエミッターカテゴリーを含む。タイプコードとサブタイプコードとは、一緒に、メッセージを送るエミッターのタイプ(例えば、大きな航空機、小さい航空機、ビーコンなど)を識別する。この場合は、これらのフィールドは、エミッターが位置決定の使用のためのADS−Bメッセージ(つまり、ADS−B位置メッセージ)を送っていることを示すために満たされる。タイプおよびサブタイプフィールドの後は、ACIDメッセージ構造は、48ビットを含む。より一般的な空対空に関連すると、これらのビットは、ASCII様フォーマットで符号化された8つの文字を伝達するために用いられる。航空機は、通常は、フライトID(例えば、「United Airlines
1531」)をここで挿入する。フライトIDは、分離および動作のために用いられ得る。
【0048】
ADS−Bメッセージが位置決定をサポートする場合には、ACIDメッセージにフライトIDが存在する必要はない。フライトIDは比較的固定しているので、ADS−B航空電子機器は、送信の時間を通信するために、このフィールドを断続的に用い得る。特に、ACIDメッセージの残りの48ビット(8文字)は、先に放送されたADS−Bメッセージの送信の時間を、1090ESプロトコルの規則に違反することなく、伝達するために用いられ得る。精密なレンジングをサポートするために、送信の時間は、10ns下の分解能に既知である必要がある。限定された数の文字をACIDメッセージに想定すると、送信の時間の分解能が大きくなると、文字によって表され得る時間インターバルは短くなる。先に記載されたUAT時間スロットソリューションに比較可能であるために、約1nsの分解能が要求される。
【0049】
ACIDメッセージの文字によって伝達され得る時間インターバルは限定されているので、符号化された送信の時間は、現在の1秒UTCフレームの始まりに対して特定され得る。例えば、242.435178msの送信の時間は、先行するADS−Bタイミングメッセージが、現在のUTCフレームの始まりの242.435178ms後に送信されたことを意味する。1つの選択肢に従うと、ACIDメッセージの8文字フィールドの最初の2文字は、ミリセコンドの送信の時間を示し得、次の3文字は、マイクロセコンドの送信の時間を示し得、最後の3文字は、ナノセコンドの送信の時間を示し得る。
【0050】
別のアプローチに従うと、最初の文字は、ACIDメッセージがタイミングメッセージであり、通常のフライトIDではないことと、残りのビットは、16進法で送信の時間を符号化するために用いられていることとを示すマーカーとして機能する特別な文字(例えば、コロンまたはセミコロン文字)で満たされ得る。概して、これは48ビットのより効率的な使用であり、256msまで1ns(7文字×16)の正確性によって符号化されることを可能にする。このことは、UATアプローチに比較可能な精度でレンジングおよび位置決定をサポートするのに十分である。結果として、ADS−Bタイミングメッセージは、図7に示されるように、その送信の時間が1nsの正確性を有して、ACIDメッセージに符号化されるために、1秒UTC時間フレームの始まりの最初の256ms内に送信モバイルプラットフォームから送信されるべきである。あるいは、4ns解像能が許容可能である場合は、1秒がACIDメッセージにおいて表され得、それによって、ADS−Bタイミングメッセージが1秒UTCフレームの開始に対して送信される場合の制約を取り除く。
【0051】
1090ESソリューションを既存のADS−B航空機の航空電子機器によって機械化するために、数多くの選択肢が利用可能である。図9において示されるように、1つのアプローチに従うと、3つのメッセージのシーケンスは、モバイルプラットフォームを1秒UTCフレーム内に送信することによって、放送され得る。3つのメッセージのシーケンスは、最初のADS−B位置メッセージと、最初のADS−B位置メッセージの送信の時
間を含むACIDメッセージと、SBS測位システムによって受信される報告を生成する受信航空機の航空電子機器を起動させる第二のADS−B位置メッセージとである。先に記載したが、曖昧さを避けるために、ADS−Bメッセージは、UTC時間フレーム内における適用可能な時間として偶数または奇数エポックを示すパリティービットを含む。第一のADS−B位置メッセージは、「偶数」パリティーメッセージとして特定され、第二のADS−B位置メッセージ(シーケンス中の第三のメッセージ)は、「奇数」パリティーメッセージとして特定される。
【0052】
現在の航空電子機器は、ADS−B位置メッセージの受信に応答して、出力報告を生成する。このスキームにおいて、最初のADS−B位置メッセージは、ADS−Bトランシーバーに報告を生成させ、その報告は、SBS測位システムに供給される。後続のACIDメッセージは、最初のADS−Bメッセージの送信の時間(TOT)をADS−Bトランシーバーシステムに供給するが、トランシーバーシステムに報告は生成させない。第二のADS−B位置メッセージは、ADS−Bトランシーバーシステムに第二の報告を生成させる。この第二の報告は、ACIDメッセージで受信されたTOTによって占有される。ACIDメッセージからのエミッターカテゴリー情報は、また、第二の報告に挿入され、SBS測位システムが第二の報告を第一の報告に関連付けることを可能にする(つまり、報告は、同じ航空機からのものであると識別可能である)。それによって、最初のASD−Bメッセージの、必要なTOTをSBS測位システムに提供する。実際には、このスキームは、SBSトランシーバーシステムが、必要なタイミング情報を2つ報告シーケンスにおけるSBS測位システムに、既存のADS−B航空電子機器に対して透明であり、既存の航空電子機器に対して、いずれのハードウェアまたはソフトウェア改変を要求しない態様で送ることを可能にする。もちろん、任意の種々の他の機構が用いられ得、将来の航空電子機器は、ADS−B位置メッセージに対する報告スキームを単純化するために実装され得る。
【0053】
1090ESプロトコル内の別の選択肢に従うと、ADS−Bメッセージ内の1つ以上のフィールドは、上に記載されたUATアプローチに類似する態様で、スロットIDまたはMSO値を符号化するために用いられ得る。例えば、ADS−Bメッセージ内のフィールドは、MSO値を符号化するために用いられ得る。しかし、MSO値が受信デバイスに対して有用であるためには、送信の時間がMSO値から導出可能でなければならず、送信の時間が、一定程度の正確性をもって、特定の時間に生じることを要求する。したがって、この選択肢は、1090ESプロトコル内の少なくともあるメッセージが送信の時間の無作為化をすることなしに送信されることを要求し、これは、1090ES機器におけるハードウェアまたはファームウェア変更を要求し得る。
【0054】
図10は、モバイルデバイスの位置を、航空機のようなモバイルプラットフォームから放送されたADS−Bメッセージから決定することに関する動作を要約する。動作1000において、モバイルデバイスは、複数のADS−Bメッセージを複数のモバイルADS−B放送デバイスのそれぞれから受信する。モバイルデバイスは、受信されたADS−Bメッセージの各々の受信の時間を動作1010において決定する。動作1020において、モバイルデバイスは、ADS−Bメッセージの各々のフィールドまたはそれぞれの後続のメッセージのフィールド内に含まれる情報(例えば、UTCエポックに対する送信の時間が、後続のACIDメッセージに符号化される)から、受信されたADS−Bメッセージの各々の送信の時間を決定する。モバイルデバイスは、ADS−Bメッセージの送信の時間および受信の時間ならびにモバイルデバイスにおいて受信されたADS−Bメッセージに含まれるモバイルADS−B放送デバイスに対する位置情報に基づいてその位置を動作1030において、多辺測量をにより決定する。特に、SBS測位システムは、ナビゲーションソリューションを決定するUATプロトコルに関する例において、上に記載されたのと本質的に同じ機構を採用し得、次いで、GPSナビゲーションソリューションに対
するバックアップとしてナビゲーション用い得るか、または精度値の比較に基づき、2つのナビゲーションソリューションのうちのより正確を用い得る。
【0055】
GPS信号と同様に、本明細書において記載される位置決定をサポートするADS−Bを備えたモバイルプラットフォームによって放送された信号は、受信器クロックのタイミングを基準デバイスのタイミングに同期させるためにも用いられ得る。この目的のために、受信デバイスは、モバイルデバイス(例えば、空中、海上または地上ベースのプラットフォーム)または固定設置(例えば、建造物に搭載された受信器)のどちらかであり得る。時間同期のためには、受信器は、単一のADS−B放送ソースのみからタイミングメッセージを要求する。なぜなら、多辺測量は必要ないからである。例えば、送信情報の時間を伝達するために、MSO値を採用するUATプロトコル実装において、単一の航空機からのADS−Bメッセージは、UAT受信器のクロックを航空機のクロックに同期させるために用いられ得る。同様に、1090ESプロトコル下では、ADS−Bメッセージシーケンスの受信は、時間同期を可能にする1つの航空機からのみ要求される。
【0056】
図11のフローチャートは、ローカルクロックを同期させる動作を要約する。動作1100において、ローカルクロックと共に配置されるADS−B受信器が、モバイルADS−B放送デバイスから送信されたADS−Bメッセージを受信する。ADS−B受信器において受信されたADS−Bメッセージの受信の時間は、動作1110において決定され、動作1120において、ADS−Bメッセージの送信の時間が、ADS−Bメッセージに含まれる情報または後続のメッセージに含まれる情報から(例えば、先に記載したメッセージに符号化されたMSO値または送信の時間を用いて)決定される。動作1130において、ローカルクロックは、ADS−Bメッセージの送信の時間または受信の時間に基づき、モバイルADS−B放送デバイスのタイミングに同期される。より具体的には、ローカルクロックのタイミング(例えば、時刻の値)とモバイルADS−B放送デバイスのクロックのタイミングとの間のタイミングエラーは、放送ADS−Bメッセージのフライトの時間および任意の既知または推定された処理遅延を含むタイミングオフセットを決定することによって計算され得る。タイミングエラーは、このタイミングオフセットと、ローカルと基準クロックとの実際の時間差との間の差異から計算され得る。タイミングエラーが決定されると、ローカルクロックのタイミングは、タイミングエラーによって調節され得、その結果、ローカルクロックのタイミングは、モバイルADS−B放送デバイスのタイミングと同じになる。
【0057】
この時間同期機構は、GPSが一時的または断続的に時間同期のために利用不能である場合に、特に有用であり得る。GPSなしでは、一般的なクロックは、約1時間以内に同期から外れる。これは、非常に高精密なセシウムクロックによって回避され得る。しかし、そのようなクロックの普及している使用は、費用が非常に高い(例えば、セシウムクロックサーバーは、現在、約30,000USドルのコストがかかる)。記載された時間同期スキームは、モバイルADS−B放送デバイス(例えば、航空機)が、受信器と互換性を有しているADS−Bをコストの一部(例えば、UAT受信器システムは、現在、約5,000USドルである)でプラットフォームに備えることによって、精密な時間基準を普及することを効率的に可能にする。
【0058】
モバイルデバイスに加えて、種々の固定プラットフォームは、モバイルADS−B放送デバイスにより放送されたメッセージによって提供される時間同期能力から利益を得ることができる。例えば、金融機関(例えば、株式取引所、仲買業務所、銀行など)を収容する建造物は、ローカルタイミング基準が金融取引のスタンピングまたはタギングの精密な時間のために、UTC時間との同期を維持することを可能にする少なくとも1つのモバイルADS−B放送デバイスからメッセージを受信する能力を有するUAT受信器を備え得る。これは、GPSに対するバックアップまたは一次基準ソースのどちらかとして用いら
れ得る。セルラー式電話塔もUTC時間同期を維持するために、ADS−B放送信号を一次または二次基準ソースとして用い得る。
【0059】
本明細書において記載された技術は、受信器が陸上の地上局からの信号にアクセスを有していない場合に、特に有益であり得る。例えば、海上関連では、海における船舶は、地上局から位置決定信号を受信する能力を有していない場合があるが、それでも、範囲内の頭上の航空機から信号を受信することができる。したがって、GPSに対する効果的な補償またはバックアップが、地上ベースの信号が利用可能でない幅広い範囲にわたり提供され得る。
【0060】
先述の明細書において、発明の実施形態が、その特定の例示的実施形態を参照して記載された。さまざまな改変が、以下の請求項に記載される発明のより広い精神および範囲を逸脱することなしに、それらの実施形態に対してなされ得ることが明らかである。特定の用語が本明細書において採用されたが、それらは、一般的および説明的な意味でのみ用いられ、限定の目的ではない。
【特許請求の範囲】
【請求項1】
モバイルデバイスの位置を決定する方法であって、
該方法は、
該モバイルデバイスにおいて、複数のメッセージを複数のモバイル基準デバイスのそれぞれから受信することであって、放送される該メッセージの各々は、基準時間に対して既知のタイミングを有している複数のメッセージ開始適用(MSO)時刻のうちの1つで始まり、該メッセージの各々は、該メッセージを送信する該モバイル基準デバイスに対する位置情報と、該メッセージの送信が開始される該MSO時刻を示すMSO値とを含む、ことと、
該モバイルデバイスにおいて受信されるメッセージの各々の受信の時間を決定することと、
該モバイルデバイスにおいて受信されるメッセージの各々の送信の時間を決定するために、該MSO値を用いることと、
該メッセージの送信の時間および受信の時間と、該モバイル基準デバイスに対する位置情報とに基づいて該モバイルデバイスの位置を多辺測量により、決定することと
を含む、方法。
【請求項2】
前記メッセージは、それぞれの空中の航空機から受信される、請求項1に記載の方法。
【請求項3】
前記複数のメッセージの各々は、放送型自動従属監視(ADS−B)メッセージであり、該ADS−Bメッセージは、該ADS−Bメッセージを送信するADS−Bを備えたモバイルプラットフォームに対する前記MSO値ならびに緯度、経度および高度情報を含む、請求項1に記載の方法。
【請求項4】
前記モバイルデバイスから、前記メッセージから決定された該モバイルデバイスの位置を放送することをさらに含む、請求項1に記載の方法。
【請求項5】
前記送信の時間は、協定世界時(UTC)エポックに対して決定される、請求項1に記載の方法。
【請求項6】
モバイルプラットフォーム上に配置されたプロセッサを含む装置であって、該プロセッサは、複数のメッセージを複数のモバイル基準デバイスのそれぞれから受信するように構成されており、放送される該メッセージの各々は、基準時間に対して既知のタイミングを有している複数のメッセージ開始適用(MSO)時刻のうちの1つで始まり、該メッセージの各々は、該メッセージを送信する該モバイル基準デバイスに対する位置情報と、該メッセージの送信が開始される該MSO時刻を示すMSO値とを含み、該プロセッサは、
該モバイルプラットフォームにおいて受信される該メッセージの各々の送信の時間を決定することであって、該送信の時間は、該MSO値から決定される、ことと、
該メッセージの各々の送信の時間および受信の時間と該モバイル基準デバイスに対する位置情報とに基づいて該モバイルプラットフォームの位置を多辺測量により、決定することと
を行うように構成されている、装置。
【請求項7】
前記プロセッサは、空中の航空機から受信される複数のメッセージの各々の送信の時間を決定するように構成されている、請求項6に記載の装置。
【請求項8】
前記プロセッサは、
放送型自動従属監視(ADS−B)を備えた複数のモバイルプラットフォームのそれぞれから受信された複数のADS−Bメッセージの各々の送信の時間を決定することであっ
て、各ADS−Bメッセージの送信の時間は、各ADS−Bメッセージの中に含まれる前記MSO値から決定される、ことと、
該ADS−Bメッセージに含まれる位置情報に基づいて該モバイルプラットフォームの位置を決定することと
を行うように構成されている、請求項6に記載の装置。
【請求項9】
前記プロセッサは、放送のために、前記モバイルデバイスの位置を送信器システムに供給するようにさらに構成されている、請求項6に記載の装置。
【請求項10】
前記プロセッサは、前記送信の時間を協定世界時(UTC)エポックに対して決定するように構成されている、請求項6に記載の装置。
【請求項11】
ソフトウェアによって符号化される1つ以上のコンピュータ読み取り可能格納媒体であって、該1つ以上のコンピュータ読み取り可能格納媒体は、コンピュータ実行可能命令を含み、該コンピュータ実行可能命令は、該ソフトウェアが実行された場合に、
モバイルプラットフォームにおいて、複数のモバイル基準デバイスのそれぞれから受信される複数のメッセージの各々の送信の時間を決定することであって、放送される該メッセージの各々は、基準時間に対して既知のタイミングを有している複数のメッセージ開始適用(MSO)時刻のうちの1つにおいて始まり、該メッセージの各々は、該メッセージを送信する該モバイル基準デバイスに対する位置情報と、該メッセージの送信が開始される該MSO時刻を示すMSO値とを含む、ことと
該メッセージの各々の送信の時間および受信の時間と該モバイル基準デバイスに対する位置情報とに基づいて該モバイルプラットフォームの位置を多辺測量により、決定することと
を行うように動作可能である、コンピュータ読み取り可能格納媒体。
【請求項12】
前記送信の時間を決定するように動作可能である前記命令は、空中の航空機から受信されるメッセージの送信の時間を決定するように動作可能である命令を含む、請求項11に記載のコンピュータ読み取り可能格納媒体。
【請求項13】
前記送信の時間を決定するように動作可能である前記命令は、複数の放送型自動従属監視(ADS−B)メッセージの各々の送信の時間を決定するように動作可能である命令を含み、該ADS−Bメッセージは、ADS−Bを備えた複数のモバイルプラットフォームのそれぞれから受信され、各ADS−Bメッセージの送信の時間は、各ADS−Bメッセージの中に含まれる前記MSO値から決定され、
前記モバイルプラットフォームの位置を決定するように動作可能な前記命令は、該ADS−Bメッセージに含まれる位置情報に基づいて多辺測量を行うように動作可能である命令を含む、請求項11に記載のコンピュータ読み取り可能格納媒体。
【請求項14】
放送のために、前記モバイルデバイスの位置を送信器システムに供給するように動作可能な命令をさらに含む、請求項11に記載のコンピュータ読み取り可能格納媒体。
【請求項15】
前記送信の時間を決定するように動作可能な前記命令は、該送信の時間を協定世界時(UTC)エポックに対して決定するように動作可能である命令を含む、請求項11に記載のコンピュータ読み取り可能格納媒体。
【請求項16】
モバイルデバイスの位置を決定する方法であって、
該方法は、
該モバイルデバイスにおいて、複数の放送型自動従属監視(ADS−B)メッセージを複数のモバイルADS−B放送デバイスのそれぞれから受信することと、
該モバイルデバイスにおいて受信される該ADS−Bメッセージの各々の受信の時間を決定することと、
該モバイルデバイスにおいて受信される該ADS−Bメッセージの各々の送信の時間を、該ADS−Bメッセージの各々のフィールドまたはそれぞれの後続のメッセージのフィールド内に含まれる情報から決定することと、
該ADS−Bメッセージの送信の時間および受信の時間と、該モバイルデバイスにおいて受信される該ADS−Bメッセージに含まれる前記モバイルADS−B放送デバイスに対する位置情報とに基づいて該モバイルデバイスの位置を多辺測量により、決定することと
を含む、方法。
【請求項17】
前記ADS−Bメッセージは、空中の航空機から送信される、請求項16に記載の方法。
【請求項18】
前記ADS−Bメッセージの各々の送信の時間を前記それぞれの後続のメッセージを介して受信することをさらに含み、該それぞれの後続のメッセージは、それぞれのADS−Bメッセージの送信の時間を含むように再構成されている航空機IDおよびカテゴリー(ACID)メッセージを含む、請求項16に記載の方法。
【請求項19】
前記モバイルデバイスから、前記ADS−Bメッセージから決定される該モバイルデバイスの位置を放送することをさらに含む、請求項16に記載の方法。
【請求項20】
前記モバイルデバイスにおいて受信される前記ADS−Bメッセージの各々の送信の時間は、無作為化されている、請求項16に記載の方法。
【請求項21】
ローカルクロックをモバイル基準デバイスのタイミングに同期させる方法であって、
該方法は、
放送型自動従属監視(ADS−B)メッセージを、該ローカルクロックと共に配置されたADS−B受信器において受信することであって、該ADS−Bメッセージは、該モバイル基準デバイスから送信される、ことと、
該ADS−B受信器において受信される該ADS−Bメッセージの受信の時間を決定することと、
該ADS−Bメッセージの送信の時間を、該ADS−Bメッセージに含まれる情報または後続のメッセージに含まれる情報から決定することと、
該ADS−Bメッセージの送信の時間および受信の時間に基づいて該ローカルクロックをモバイル基準デバイスのタイミングに同期させることと
を含む、方法。
【請求項22】
前記ADS−Bメッセージは、空中の航空機から受信される、請求項21に記載の方法。
【請求項23】
前記ADS−Bメッセージは、メッセージ開始適用(MSO)値を含むADS−Bメッセージであり、該ADS−Bメッセージの送信の時間は、該MSO値から決定される、請求項21に記載の方法。
【請求項24】
前記ADS−Bメッセージは、1090ESプロトコル下で送信される、請求項21に記載の方法。
【請求項25】
前記ADS−Bメッセージの送信の時間は、後続のメッセージにおいて受信される、請求項21に記載の方法。
【請求項1】
モバイルデバイスの位置を決定する方法であって、
該方法は、
該モバイルデバイスにおいて、複数のメッセージを複数のモバイル基準デバイスのそれぞれから受信することであって、放送される該メッセージの各々は、基準時間に対して既知のタイミングを有している複数のメッセージ開始適用(MSO)時刻のうちの1つで始まり、該メッセージの各々は、該メッセージを送信する該モバイル基準デバイスに対する位置情報と、該メッセージの送信が開始される該MSO時刻を示すMSO値とを含む、ことと、
該モバイルデバイスにおいて受信されるメッセージの各々の受信の時間を決定することと、
該モバイルデバイスにおいて受信されるメッセージの各々の送信の時間を決定するために、該MSO値を用いることと、
該メッセージの送信の時間および受信の時間と、該モバイル基準デバイスに対する位置情報とに基づいて該モバイルデバイスの位置を多辺測量により、決定することと
を含む、方法。
【請求項2】
前記メッセージは、それぞれの空中の航空機から受信される、請求項1に記載の方法。
【請求項3】
前記複数のメッセージの各々は、放送型自動従属監視(ADS−B)メッセージであり、該ADS−Bメッセージは、該ADS−Bメッセージを送信するADS−Bを備えたモバイルプラットフォームに対する前記MSO値ならびに緯度、経度および高度情報を含む、請求項1に記載の方法。
【請求項4】
前記モバイルデバイスから、前記メッセージから決定された該モバイルデバイスの位置を放送することをさらに含む、請求項1に記載の方法。
【請求項5】
前記送信の時間は、協定世界時(UTC)エポックに対して決定される、請求項1に記載の方法。
【請求項6】
モバイルプラットフォーム上に配置されたプロセッサを含む装置であって、該プロセッサは、複数のメッセージを複数のモバイル基準デバイスのそれぞれから受信するように構成されており、放送される該メッセージの各々は、基準時間に対して既知のタイミングを有している複数のメッセージ開始適用(MSO)時刻のうちの1つで始まり、該メッセージの各々は、該メッセージを送信する該モバイル基準デバイスに対する位置情報と、該メッセージの送信が開始される該MSO時刻を示すMSO値とを含み、該プロセッサは、
該モバイルプラットフォームにおいて受信される該メッセージの各々の送信の時間を決定することであって、該送信の時間は、該MSO値から決定される、ことと、
該メッセージの各々の送信の時間および受信の時間と該モバイル基準デバイスに対する位置情報とに基づいて該モバイルプラットフォームの位置を多辺測量により、決定することと
を行うように構成されている、装置。
【請求項7】
前記プロセッサは、空中の航空機から受信される複数のメッセージの各々の送信の時間を決定するように構成されている、請求項6に記載の装置。
【請求項8】
前記プロセッサは、
放送型自動従属監視(ADS−B)を備えた複数のモバイルプラットフォームのそれぞれから受信された複数のADS−Bメッセージの各々の送信の時間を決定することであっ
て、各ADS−Bメッセージの送信の時間は、各ADS−Bメッセージの中に含まれる前記MSO値から決定される、ことと、
該ADS−Bメッセージに含まれる位置情報に基づいて該モバイルプラットフォームの位置を決定することと
を行うように構成されている、請求項6に記載の装置。
【請求項9】
前記プロセッサは、放送のために、前記モバイルデバイスの位置を送信器システムに供給するようにさらに構成されている、請求項6に記載の装置。
【請求項10】
前記プロセッサは、前記送信の時間を協定世界時(UTC)エポックに対して決定するように構成されている、請求項6に記載の装置。
【請求項11】
ソフトウェアによって符号化される1つ以上のコンピュータ読み取り可能格納媒体であって、該1つ以上のコンピュータ読み取り可能格納媒体は、コンピュータ実行可能命令を含み、該コンピュータ実行可能命令は、該ソフトウェアが実行された場合に、
モバイルプラットフォームにおいて、複数のモバイル基準デバイスのそれぞれから受信される複数のメッセージの各々の送信の時間を決定することであって、放送される該メッセージの各々は、基準時間に対して既知のタイミングを有している複数のメッセージ開始適用(MSO)時刻のうちの1つにおいて始まり、該メッセージの各々は、該メッセージを送信する該モバイル基準デバイスに対する位置情報と、該メッセージの送信が開始される該MSO時刻を示すMSO値とを含む、ことと
該メッセージの各々の送信の時間および受信の時間と該モバイル基準デバイスに対する位置情報とに基づいて該モバイルプラットフォームの位置を多辺測量により、決定することと
を行うように動作可能である、コンピュータ読み取り可能格納媒体。
【請求項12】
前記送信の時間を決定するように動作可能である前記命令は、空中の航空機から受信されるメッセージの送信の時間を決定するように動作可能である命令を含む、請求項11に記載のコンピュータ読み取り可能格納媒体。
【請求項13】
前記送信の時間を決定するように動作可能である前記命令は、複数の放送型自動従属監視(ADS−B)メッセージの各々の送信の時間を決定するように動作可能である命令を含み、該ADS−Bメッセージは、ADS−Bを備えた複数のモバイルプラットフォームのそれぞれから受信され、各ADS−Bメッセージの送信の時間は、各ADS−Bメッセージの中に含まれる前記MSO値から決定され、
前記モバイルプラットフォームの位置を決定するように動作可能な前記命令は、該ADS−Bメッセージに含まれる位置情報に基づいて多辺測量を行うように動作可能である命令を含む、請求項11に記載のコンピュータ読み取り可能格納媒体。
【請求項14】
放送のために、前記モバイルデバイスの位置を送信器システムに供給するように動作可能な命令をさらに含む、請求項11に記載のコンピュータ読み取り可能格納媒体。
【請求項15】
前記送信の時間を決定するように動作可能な前記命令は、該送信の時間を協定世界時(UTC)エポックに対して決定するように動作可能である命令を含む、請求項11に記載のコンピュータ読み取り可能格納媒体。
【請求項16】
モバイルデバイスの位置を決定する方法であって、
該方法は、
該モバイルデバイスにおいて、複数の放送型自動従属監視(ADS−B)メッセージを複数のモバイルADS−B放送デバイスのそれぞれから受信することと、
該モバイルデバイスにおいて受信される該ADS−Bメッセージの各々の受信の時間を決定することと、
該モバイルデバイスにおいて受信される該ADS−Bメッセージの各々の送信の時間を、該ADS−Bメッセージの各々のフィールドまたはそれぞれの後続のメッセージのフィールド内に含まれる情報から決定することと、
該ADS−Bメッセージの送信の時間および受信の時間と、該モバイルデバイスにおいて受信される該ADS−Bメッセージに含まれる前記モバイルADS−B放送デバイスに対する位置情報とに基づいて該モバイルデバイスの位置を多辺測量により、決定することと
を含む、方法。
【請求項17】
前記ADS−Bメッセージは、空中の航空機から送信される、請求項16に記載の方法。
【請求項18】
前記ADS−Bメッセージの各々の送信の時間を前記それぞれの後続のメッセージを介して受信することをさらに含み、該それぞれの後続のメッセージは、それぞれのADS−Bメッセージの送信の時間を含むように再構成されている航空機IDおよびカテゴリー(ACID)メッセージを含む、請求項16に記載の方法。
【請求項19】
前記モバイルデバイスから、前記ADS−Bメッセージから決定される該モバイルデバイスの位置を放送することをさらに含む、請求項16に記載の方法。
【請求項20】
前記モバイルデバイスにおいて受信される前記ADS−Bメッセージの各々の送信の時間は、無作為化されている、請求項16に記載の方法。
【請求項21】
ローカルクロックをモバイル基準デバイスのタイミングに同期させる方法であって、
該方法は、
放送型自動従属監視(ADS−B)メッセージを、該ローカルクロックと共に配置されたADS−B受信器において受信することであって、該ADS−Bメッセージは、該モバイル基準デバイスから送信される、ことと、
該ADS−B受信器において受信される該ADS−Bメッセージの受信の時間を決定することと、
該ADS−Bメッセージの送信の時間を、該ADS−Bメッセージに含まれる情報または後続のメッセージに含まれる情報から決定することと、
該ADS−Bメッセージの送信の時間および受信の時間に基づいて該ローカルクロックをモバイル基準デバイスのタイミングに同期させることと
を含む、方法。
【請求項22】
前記ADS−Bメッセージは、空中の航空機から受信される、請求項21に記載の方法。
【請求項23】
前記ADS−Bメッセージは、メッセージ開始適用(MSO)値を含むADS−Bメッセージであり、該ADS−Bメッセージの送信の時間は、該MSO値から決定される、請求項21に記載の方法。
【請求項24】
前記ADS−Bメッセージは、1090ESプロトコル下で送信される、請求項21に記載の方法。
【請求項25】
前記ADS−Bメッセージの送信の時間は、後続のメッセージにおいて受信される、請求項21に記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−225915(P2012−225915A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2012−92272(P2012−92272)
【出願日】平成24年4月13日(2012.4.13)
【出願人】(512067159)エクセリス インコーポレイテッド (8)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成24年4月13日(2012.4.13)
【出願人】(512067159)エクセリス インコーポレイテッド (8)
【Fターム(参考)】
[ Back to top ]