
AFM測定方法及びAFM測定システム
【課題】AFM測定方法及びAFM測定システムが提供される。
【解決手段】光源から入射光が照射される基板の上の複数個の地点にカンチレバーの先端を提供し、前記入射光によって前記カンチレバーの先端と前記基板との間で発生された散乱光の強度を測定し、前記散乱光の強度をデータ処理部へ入力して前記入射光の強度が最高である地点を探す。前記カンチレバーの先端を前記入射光の強度が最高である地点へ移動させる。
【解決手段】光源から入射光が照射される基板の上の複数個の地点にカンチレバーの先端を提供し、前記入射光によって前記カンチレバーの先端と前記基板との間で発生された散乱光の強度を測定し、前記散乱光の強度をデータ処理部へ入力して前記入射光の強度が最高である地点を探す。前記カンチレバーの先端を前記入射光の強度が最高である地点へ移動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はAFMに関し、より詳細にはAFM測定方法及びAFM測定システムに関する。
【背景技術】
【0002】
原子間力顕微鏡(Atomic Force Microscope、以下AFMと称する)は原子の間の相互作用力を利用して試料表面の形状を原子単位で測定する高精密表面分析装置である。AFMは試料を測定するためのカンチレバー(cantilever)が装着され、前記カンチレバーの端部には鋭い探針(probe)又は先端(tip)が取り付けられ、この探針の先端は幾つかの原子程度の大きさ(数nm)で非常に尖鋭である。この探針を試料表面に接近させれば、探針の先端の原子と試料表面原子との間の間隔の程度にしたがって引寄せる力(引力)や押出す力(斥力)が作用する。
【0003】
AFMは半導体工程等で表面の粗さ測定、チップ又はマスク等の欠陥の測定等に使用される。但し、AFMは化学的選択性がないので、サンプルの化学的特性を区別する能力がない。最近には、AFMに光学顕微鏡を結合するか、或いはAFMの先端(tip)の化学的処理を通じて化学的選択性を与える等の方法が研究されている。その中の1つとしてラマン分光法(Raman Spectroscopy)を利用する方法がある。
【0004】
光が媒質を通過するとき、光の一部は散乱されて進行方向から逸脱して他の方向に進行し、散乱された光は元のエネルギーをそのまま有することもあるが、しかし、元の光のエネルギーより少ないか、或いは多いエネルギーを有する場合もある。散乱された光の中で元のエネルギーをそのまま維持しながら、散乱される過程をレイリー散乱(Rayleigh scattering)と称し、エネルギーを失うか、或いは得ながら、散乱される過程をラマン散乱(Raman Scattering又はinelastic scattering)と称する。分子が光を受け取る時に分子は励起状態(excited vibration state)に励起し、この励起状態の分子は3つの方式を経て再び基底状態に戻るようになる。先ず、入射光源のエネルギーを全て放出しながら基底状態に戻れば、入射光源のようなエネルギーの光が散乱されて放出される。この場合が前記のレイリー散乱である。これに反して、分子の振動エネルギー程度を吸収するか、或いは放出した後、基底状態に戻る場合をラマン散乱と称する。この時、電子状態は変わらないが、振動状態の転移が発生する。分子が振動エネルギーを吸収した後に、基底状態に戻る場合をストークス効果と称し、この時、輻射線(radiant ray)のエネルギーが分子によって吸収されるので、入射光源より低いエネルギー、即ち、より長い波長の光が散乱される。反面、分子が有している振動エネルギーを放出し、基底状態に戻る場合を反ストークス効果と称し、輻射線が分子からエネルギーを得た状態であるので、入射光源より高いエネルギー、即ち、短い波長の光が散乱される。このようなラマン散乱過程を通じて入射光源と物質との間のエネルギー交換が発生する。物質が吸収又は放出するエネルギーは各物質を構成する分子構造と密接な関係があり、ラマン散乱による散乱光は各物質にしたがって固有であるので、散乱光を分析すれば、物質の分子構造を推定できる。一般的にこのような変化は光が散乱前後、ある程度のエネルギーを失うか、或いは得るかを観察することによって測定され得る。前記散乱前後のスペクトルの変化をラマンシフト(Raman Shift)と称する。前記ラマンシフトは分子の振動周波数に該当する。このようなラマン分光器がAFMと結合される場合、AFMの探針と接触される領域に限定されて増幅されたラマン信号が発生して高分解能のラマン分光分析が可能である。このような方式をTERS(Tip−Enhances Raman Spectroscopy)という。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国公開特許第2005−0242283号公報
【特許文献2】米国公開特許第2007−0091977号公報
【特許文献3】日本国公開特許第10−214868号公報
【特許文献4】韓国公開特許第10−2006−0002299号公報
【特許文献5】韓国特許第10−0720456号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題はAFMスキャニングの時、入射光の強度が最高になる地点にカンチレバーの先端が位置した状態でスキャニングできるAFMスキャニング方法を提供することである。
【0007】
本発明が解決しようとする課題はこれに制限されるものではなく、言及されないその他の課題は下の記載から当業者であれば明確に理解できる。
【課題を解決するための手段】
【0008】
上述した技術的課題を解決するためのAFM測定方法を提供する。この方法は光源から入射光が照射される基板の上の複数個の地点にカンチレバーの先端を提供することと、前記入射光によって前記カンチレバーの先端と前記基板との間で発生された散乱光の強度を測定することと、前記散乱光の強度をデータ処理部へ入力して前記入射光の強度が最高である地点を探すことと、前記カンチレバーの先端を前記入射光の強度が最高である地点へ移動させることと、を含む。
【0009】
本発明の一実施形態によれば、前記カンチレバーの先端と前記光源との相対的位置を固定した状態で前記基板を移動しながら測定することをさらに含む。
【0010】
本発明の一実施形態によれば、前記データ処理部はガウシアン関数を利用して前記入射光の強度が最高である地点を探すことを特徴とする。
【0011】
本発明の一実施形態によれば、前記データ処理部は前記複数個の地点と前記複数個の地点での前記散乱光の強度をガウシアン関数に代入して前記入射光の強度が最高である地点を探すことを特徴とする。
【0012】
本発明の一実施形態によれば、前記複数個の地点にカンチレバーを提供することは前記入射光を前記カンチレバーの先端に照射することと、前記入射光が固定された状態で前記カンチレバーを移動させることと、を含む。
【0013】
上述した技術的課題を解決するためのAFMシステムを提供する。このシステムは光源部、カンチレバーと前記カンチレバーの端部に提供された先端とを含む測定部、前記光源部から入射光が照射される基板の上の複数個の地点に前記カンチレバーを提供する駆動部、前記カンチレバーの先端と前記基板との間に発生した散乱光の強度を測定するセンサー部、及び前記散乱光の強度を受信して前記入射光の強度が最高である地点を探すデータ処理部を含む。
【0014】
本発明の一実施形態によれば、前記カンチレバーの先端は金属物質で表面処理されていることを特徴とする。
【0015】
本発明の一実施形態によれば、前記駆動部は前記先端を前記入射光の強度が最高である地点へ移動させる。
【0016】
本発明の一実施形態によれば、前記データ処理部はガウシアン関数を利用して前記入射光の強度が最高である地点を探すことを特徴とする。
【0017】
本発明の一実施形態によれば、前記データ処理部は前記複数個の地点と前記散乱光の強度とをガウシアン関数に代入して前記入射光の強度が最高である地点を探すことを特徴とする。
【発明の効果】
【0018】
本発明によれば、入射光の強度が最高になる地点にカンチレバーの先端が位置した状態でスキャニングされるので、より精密にAFMスキャニングできる。
【図面の簡単な説明】
【0019】
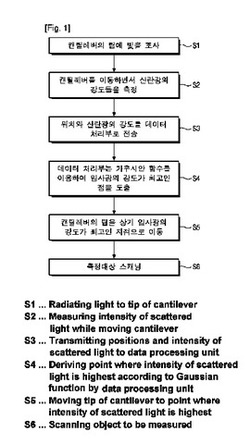
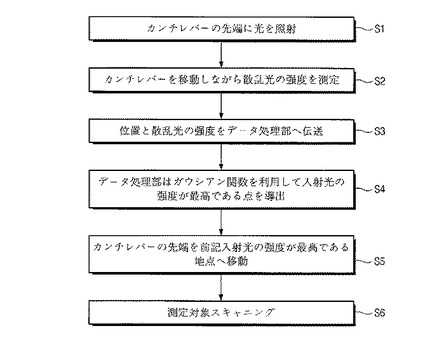
【図1】本発明の一実施形態によるAFM測定方法の工程フローチャートである。
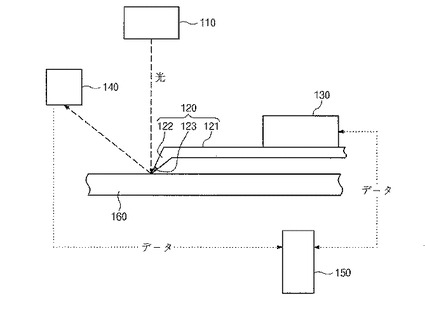
【図2】本発明の一実施形態によるAFM測定システムを説明するための図面である。
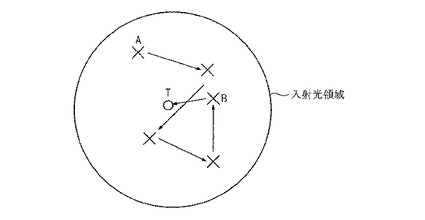
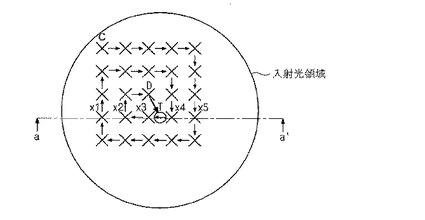
【図3】本発明の一実施形態によるカンチレバーの先端の移動経路を図示する図面である。
【図4】本発明の一実施形態によるカンチレバーの先端の移動経路を図示する図面である。
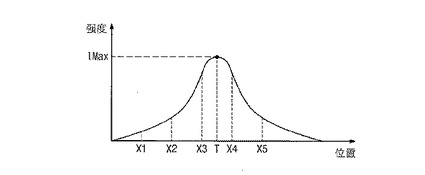
【図5】図4のa−a’線に沿う散乱光の強度分布を示す曲線である。
【発明を実施するための形態】
【0020】
本発明の長所及び特徴、及びそれを達成する方法は、添付される図面と共に詳細に後述されている実施形態を参照すれば、明確になる。しかし、本発明は以下で開示される実施形態に限定されるものではなく、互いに異なる多様な形態に具現化でき、単に本実施形態は本発明の開示が完全になるようにし、本発明が属する技術分野で通常の知識を有する者も発明の範疇を完全に知らせるために提供されることであり、本発明は請求項の範疇のみによって定義される。すなわち、本実施形態は、単に本発明を開示し、本発明が属する技術分野で通常の知識を有する者に本発明の範疇を知らせるために提供されるものである。明細書全体に亘って同一参照符号は同一構成要素を示す。
【0021】
本明細書の多様な実施形態で第1、第2、第3等の用語が構成要素等を記述するために使用されたが、これは単にいずれか構成要素等を他の構成要素と区別させるために使用されただけであり、このような用語によって限定されてはならない。
【0022】
本明細書で使用された用語は実施形態を説明するためのものであり、本発明を制限しようとするものではない。本明細書で単数形は、特別に言及しない限り複数形も含む。明細書で使用される‘含む(comprises)’及び/又は‘包含する(comprising)’言及された構成要素、段階、動作及び/又は素子は1つ以上の他の構成要素、段階、動作及び/又は素子の存在又は追加を排除しない。
【0023】
また、本明細書で記述する実施形態は本発明の理想的な例示図である断面図及び/又は平面図を参考して説明される。また、図面において、膜及び領域の厚さは技術的内容を効果的に説明するために誇張されたものである。したがって、製造技術及び/又は許容誤差等によって例示図の形態が変形され得る。したがって、本発明の実施形態は図示された特定形態に制限されるものではなく製造工程によって生成される形態の変化も含むものである。例えば、直角に図示されたエッチング領域は丸められるか、或いは所定の曲率を有する形態であり得る。したがって、図面で例示された領域は概略的な属性を有し、図面で例示された領域の模様は素子の領域の特定形態を例示するためのものであり、発明の範疇を制限するためのことではない。
【0024】
図1は本発明の一実施形態によるAFM測定方法を説明するためのフローチャートである。図2は本発明の一実施形態によるAFM測定システムを説明するための図面である。
図1及び図2を参照すると、カンチレバー121の先端(tip)122へ光を照射する(S1)。前記光は光源部110で発生される。前記光源部110はレーザー光源である。一例としてNd:YAGレーザー(neodymium−doped yttriym aluminium ganet laser)又はTi:サファイアレーザーである。前記光源部110で発生された光はスプリッター(splitter)(図示せず)を通じて以下に説明される基板のスキャニングの時にカンチレバー121の上部へ照射されてカンチレバー121の動きを測定するように使用される。
【0025】
前記光源部110で発生された光は測定部120に達する。前記測定部120はカンチレバー121を含む。前記カンチレバー121の端部には先端122が提供される。一例として前記先端122の形状は三角錐、四角錐、円錐である。前記先端122の末端は幾つかの原子程度の大きさで非常に尖鋭である。
【0026】
測定対象表面に前記先端122を接近させれば、前記先端122の原子と測定対象表面の原子との間に引力又は斥力が作用する。前記先端122の末端はラマン散乱のための金属物質123で表面処理される。一例として前記金属物質123は金(Au)、銀(Ag)である。本発明の他の実施形態において、前記先端122がラマン散乱のための金属物質123で提供される。ラマン散乱の場合、蛍光や赤外線分光に比べて信号の強さが非常に小さいので、ラマン信号自体の増幅を必要とする。前記金属物質123が前記先端122の末端に局部的に形成されているので、以下に説明される測定対象の測定の時、ラマン散乱の領域が制限されて感度、解像度が増大される。
【0027】
前記光源部110で発生された光の幅は前記先端122の末端に形成された金属物質123のサイズより一般的に大きい。レンズ等を利用する光の集光(focusing)により解像度の改善が可能であるが、光学的な方式での光の集光には限界がある。本発明の一実施形態では測定対象に到達する光の入射領域の中で最も強度が高い領域に前記先端122の末端を配置して測定対象を測定することによって、測定対象の測定の感度、解像度を増大させる。
【0028】
前記金属物質123と基板160との間で発生された散乱光はセンサー部140で測定される。前記基板160は半導体基板に限定されず、あらゆる測定対象を含む。前記センサー部140は前記基板160と前記金属物質123との間で発生された散乱前後に波長の変化した光の強度を測定することができる。
【0029】
図1を続いて参照すると、前記カンチレバー121を移動しながら散乱前後に波長の変化した光の強度を様々な位置で測定する(S2)。前記カンチレバー121は駆動部130によって移動される。前記駆動部130は前記測定部120を微細に移動させる。前記駆動部130は圧電素子(piezo−electric device)であり得る。前記駆動部130によって前記先端122が前記基板160の上に位置する地点に基づく散乱された光の強度を測定してデータを得られる。
【0030】
図3乃至図5を参照すると、前記先端122の移動経路が図示される。前記先端122の移動経路は前記入射光領域内で散乱光の強度を獲得できるいずれの経路も可能である。本発明の一実施形態によれば、図3に示したようにA地点から始めて無作為的な間隔と方向へ移動してB地点まで5つの地点に対するデータを得られる。本発明の他の実施形態によれば、図4に示したようにC地点、即ち、最初前記先端122が位置された地点から始めて所定の間隔でD地点に到達される時まで25個の地点に対するデータを得られる。図5は図4のa−a’線に沿う散乱光の強度分布を示す曲線である。前記散乱光の強度分布は3次元的なガウシアン関数の形態であり得る。
【0031】
図1乃至図5を続いて参照すると、前記データがデータ処理部150へ伝送される(S3)。前記データ処理部150は前記データを利用して入射光領域内で入射光の強度が最高である地点Tを導出できる。本発明の一実施形態によれば、前記入射光の強度が最高である地点を導出する方法はガウシアン関数を利用することができる(S4)。本発明の一実施形態によれば、散乱光の強度が大きければ、入射光の強度も大きいので、前記基板160の上の前記先端122の位置と、前記先端122の位置で散乱光の強度を測定して得られた値とをガウシアン関数に代入して前記入射光の強度が最高である地点(ガウシアン関数グラフのピーク:T)を導出できる。
【0032】
図1乃至図5を続いて参照すると、前記カンチレバーの先端122を前記入射光の強度が最高である地点Tへ移動する(S5)。この場合、前記光源110の相対的位置は固定された状態である。前記カンチレバーの先端122が前記入射光の強度が最高である地点へ移動させる場合、以下に説明される前記基板160のスキャニングの時より感度、解像度が増大される。前記カンチレバーの先端122は前記駆動部130によって前記入射光の強度が最高である地点へ移動される。
【0033】
図1を続いて参照すると、前記カンチレバーの先端122が前記入射光の強度が最高である地点に固定された状態で前記基板160がスキャニングされる(S6)。前記スキャニングは前記カンチレバーの先端122と前記光源110との相対的位置が固定された状態で前記基板160を移動させて行われる。また、前記カンチレバーの先端122と前記光源110とを、相対的位置が固定された状態で同時に移動させ、前記基板160をスキャニングすることもできる。
【0034】
前記実施形態の説明は、本発明のさらに徹底した理解を提供するために図面を参照に例としてあげたものに過ぎないので、本発明を限定する意味で解釈されてはならない。そして、本発明の技術分野で通常の知識を有する者が、本発明の基本的な原理を逸脱しない範囲内で多様な変化と変更ができるのは勿論である。
【技術分野】
【0001】
本発明はAFMに関し、より詳細にはAFM測定方法及びAFM測定システムに関する。
【背景技術】
【0002】
原子間力顕微鏡(Atomic Force Microscope、以下AFMと称する)は原子の間の相互作用力を利用して試料表面の形状を原子単位で測定する高精密表面分析装置である。AFMは試料を測定するためのカンチレバー(cantilever)が装着され、前記カンチレバーの端部には鋭い探針(probe)又は先端(tip)が取り付けられ、この探針の先端は幾つかの原子程度の大きさ(数nm)で非常に尖鋭である。この探針を試料表面に接近させれば、探針の先端の原子と試料表面原子との間の間隔の程度にしたがって引寄せる力(引力)や押出す力(斥力)が作用する。
【0003】
AFMは半導体工程等で表面の粗さ測定、チップ又はマスク等の欠陥の測定等に使用される。但し、AFMは化学的選択性がないので、サンプルの化学的特性を区別する能力がない。最近には、AFMに光学顕微鏡を結合するか、或いはAFMの先端(tip)の化学的処理を通じて化学的選択性を与える等の方法が研究されている。その中の1つとしてラマン分光法(Raman Spectroscopy)を利用する方法がある。
【0004】
光が媒質を通過するとき、光の一部は散乱されて進行方向から逸脱して他の方向に進行し、散乱された光は元のエネルギーをそのまま有することもあるが、しかし、元の光のエネルギーより少ないか、或いは多いエネルギーを有する場合もある。散乱された光の中で元のエネルギーをそのまま維持しながら、散乱される過程をレイリー散乱(Rayleigh scattering)と称し、エネルギーを失うか、或いは得ながら、散乱される過程をラマン散乱(Raman Scattering又はinelastic scattering)と称する。分子が光を受け取る時に分子は励起状態(excited vibration state)に励起し、この励起状態の分子は3つの方式を経て再び基底状態に戻るようになる。先ず、入射光源のエネルギーを全て放出しながら基底状態に戻れば、入射光源のようなエネルギーの光が散乱されて放出される。この場合が前記のレイリー散乱である。これに反して、分子の振動エネルギー程度を吸収するか、或いは放出した後、基底状態に戻る場合をラマン散乱と称する。この時、電子状態は変わらないが、振動状態の転移が発生する。分子が振動エネルギーを吸収した後に、基底状態に戻る場合をストークス効果と称し、この時、輻射線(radiant ray)のエネルギーが分子によって吸収されるので、入射光源より低いエネルギー、即ち、より長い波長の光が散乱される。反面、分子が有している振動エネルギーを放出し、基底状態に戻る場合を反ストークス効果と称し、輻射線が分子からエネルギーを得た状態であるので、入射光源より高いエネルギー、即ち、短い波長の光が散乱される。このようなラマン散乱過程を通じて入射光源と物質との間のエネルギー交換が発生する。物質が吸収又は放出するエネルギーは各物質を構成する分子構造と密接な関係があり、ラマン散乱による散乱光は各物質にしたがって固有であるので、散乱光を分析すれば、物質の分子構造を推定できる。一般的にこのような変化は光が散乱前後、ある程度のエネルギーを失うか、或いは得るかを観察することによって測定され得る。前記散乱前後のスペクトルの変化をラマンシフト(Raman Shift)と称する。前記ラマンシフトは分子の振動周波数に該当する。このようなラマン分光器がAFMと結合される場合、AFMの探針と接触される領域に限定されて増幅されたラマン信号が発生して高分解能のラマン分光分析が可能である。このような方式をTERS(Tip−Enhances Raman Spectroscopy)という。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国公開特許第2005−0242283号公報
【特許文献2】米国公開特許第2007−0091977号公報
【特許文献3】日本国公開特許第10−214868号公報
【特許文献4】韓国公開特許第10−2006−0002299号公報
【特許文献5】韓国特許第10−0720456号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題はAFMスキャニングの時、入射光の強度が最高になる地点にカンチレバーの先端が位置した状態でスキャニングできるAFMスキャニング方法を提供することである。
【0007】
本発明が解決しようとする課題はこれに制限されるものではなく、言及されないその他の課題は下の記載から当業者であれば明確に理解できる。
【課題を解決するための手段】
【0008】
上述した技術的課題を解決するためのAFM測定方法を提供する。この方法は光源から入射光が照射される基板の上の複数個の地点にカンチレバーの先端を提供することと、前記入射光によって前記カンチレバーの先端と前記基板との間で発生された散乱光の強度を測定することと、前記散乱光の強度をデータ処理部へ入力して前記入射光の強度が最高である地点を探すことと、前記カンチレバーの先端を前記入射光の強度が最高である地点へ移動させることと、を含む。
【0009】
本発明の一実施形態によれば、前記カンチレバーの先端と前記光源との相対的位置を固定した状態で前記基板を移動しながら測定することをさらに含む。
【0010】
本発明の一実施形態によれば、前記データ処理部はガウシアン関数を利用して前記入射光の強度が最高である地点を探すことを特徴とする。
【0011】
本発明の一実施形態によれば、前記データ処理部は前記複数個の地点と前記複数個の地点での前記散乱光の強度をガウシアン関数に代入して前記入射光の強度が最高である地点を探すことを特徴とする。
【0012】
本発明の一実施形態によれば、前記複数個の地点にカンチレバーを提供することは前記入射光を前記カンチレバーの先端に照射することと、前記入射光が固定された状態で前記カンチレバーを移動させることと、を含む。
【0013】
上述した技術的課題を解決するためのAFMシステムを提供する。このシステムは光源部、カンチレバーと前記カンチレバーの端部に提供された先端とを含む測定部、前記光源部から入射光が照射される基板の上の複数個の地点に前記カンチレバーを提供する駆動部、前記カンチレバーの先端と前記基板との間に発生した散乱光の強度を測定するセンサー部、及び前記散乱光の強度を受信して前記入射光の強度が最高である地点を探すデータ処理部を含む。
【0014】
本発明の一実施形態によれば、前記カンチレバーの先端は金属物質で表面処理されていることを特徴とする。
【0015】
本発明の一実施形態によれば、前記駆動部は前記先端を前記入射光の強度が最高である地点へ移動させる。
【0016】
本発明の一実施形態によれば、前記データ処理部はガウシアン関数を利用して前記入射光の強度が最高である地点を探すことを特徴とする。
【0017】
本発明の一実施形態によれば、前記データ処理部は前記複数個の地点と前記散乱光の強度とをガウシアン関数に代入して前記入射光の強度が最高である地点を探すことを特徴とする。
【発明の効果】
【0018】
本発明によれば、入射光の強度が最高になる地点にカンチレバーの先端が位置した状態でスキャニングされるので、より精密にAFMスキャニングできる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施形態によるAFM測定方法の工程フローチャートである。
【図2】本発明の一実施形態によるAFM測定システムを説明するための図面である。
【図3】本発明の一実施形態によるカンチレバーの先端の移動経路を図示する図面である。
【図4】本発明の一実施形態によるカンチレバーの先端の移動経路を図示する図面である。
【図5】図4のa−a’線に沿う散乱光の強度分布を示す曲線である。
【発明を実施するための形態】
【0020】
本発明の長所及び特徴、及びそれを達成する方法は、添付される図面と共に詳細に後述されている実施形態を参照すれば、明確になる。しかし、本発明は以下で開示される実施形態に限定されるものではなく、互いに異なる多様な形態に具現化でき、単に本実施形態は本発明の開示が完全になるようにし、本発明が属する技術分野で通常の知識を有する者も発明の範疇を完全に知らせるために提供されることであり、本発明は請求項の範疇のみによって定義される。すなわち、本実施形態は、単に本発明を開示し、本発明が属する技術分野で通常の知識を有する者に本発明の範疇を知らせるために提供されるものである。明細書全体に亘って同一参照符号は同一構成要素を示す。
【0021】
本明細書の多様な実施形態で第1、第2、第3等の用語が構成要素等を記述するために使用されたが、これは単にいずれか構成要素等を他の構成要素と区別させるために使用されただけであり、このような用語によって限定されてはならない。
【0022】
本明細書で使用された用語は実施形態を説明するためのものであり、本発明を制限しようとするものではない。本明細書で単数形は、特別に言及しない限り複数形も含む。明細書で使用される‘含む(comprises)’及び/又は‘包含する(comprising)’言及された構成要素、段階、動作及び/又は素子は1つ以上の他の構成要素、段階、動作及び/又は素子の存在又は追加を排除しない。
【0023】
また、本明細書で記述する実施形態は本発明の理想的な例示図である断面図及び/又は平面図を参考して説明される。また、図面において、膜及び領域の厚さは技術的内容を効果的に説明するために誇張されたものである。したがって、製造技術及び/又は許容誤差等によって例示図の形態が変形され得る。したがって、本発明の実施形態は図示された特定形態に制限されるものではなく製造工程によって生成される形態の変化も含むものである。例えば、直角に図示されたエッチング領域は丸められるか、或いは所定の曲率を有する形態であり得る。したがって、図面で例示された領域は概略的な属性を有し、図面で例示された領域の模様は素子の領域の特定形態を例示するためのものであり、発明の範疇を制限するためのことではない。
【0024】
図1は本発明の一実施形態によるAFM測定方法を説明するためのフローチャートである。図2は本発明の一実施形態によるAFM測定システムを説明するための図面である。
図1及び図2を参照すると、カンチレバー121の先端(tip)122へ光を照射する(S1)。前記光は光源部110で発生される。前記光源部110はレーザー光源である。一例としてNd:YAGレーザー(neodymium−doped yttriym aluminium ganet laser)又はTi:サファイアレーザーである。前記光源部110で発生された光はスプリッター(splitter)(図示せず)を通じて以下に説明される基板のスキャニングの時にカンチレバー121の上部へ照射されてカンチレバー121の動きを測定するように使用される。
【0025】
前記光源部110で発生された光は測定部120に達する。前記測定部120はカンチレバー121を含む。前記カンチレバー121の端部には先端122が提供される。一例として前記先端122の形状は三角錐、四角錐、円錐である。前記先端122の末端は幾つかの原子程度の大きさで非常に尖鋭である。
【0026】
測定対象表面に前記先端122を接近させれば、前記先端122の原子と測定対象表面の原子との間に引力又は斥力が作用する。前記先端122の末端はラマン散乱のための金属物質123で表面処理される。一例として前記金属物質123は金(Au)、銀(Ag)である。本発明の他の実施形態において、前記先端122がラマン散乱のための金属物質123で提供される。ラマン散乱の場合、蛍光や赤外線分光に比べて信号の強さが非常に小さいので、ラマン信号自体の増幅を必要とする。前記金属物質123が前記先端122の末端に局部的に形成されているので、以下に説明される測定対象の測定の時、ラマン散乱の領域が制限されて感度、解像度が増大される。
【0027】
前記光源部110で発生された光の幅は前記先端122の末端に形成された金属物質123のサイズより一般的に大きい。レンズ等を利用する光の集光(focusing)により解像度の改善が可能であるが、光学的な方式での光の集光には限界がある。本発明の一実施形態では測定対象に到達する光の入射領域の中で最も強度が高い領域に前記先端122の末端を配置して測定対象を測定することによって、測定対象の測定の感度、解像度を増大させる。
【0028】
前記金属物質123と基板160との間で発生された散乱光はセンサー部140で測定される。前記基板160は半導体基板に限定されず、あらゆる測定対象を含む。前記センサー部140は前記基板160と前記金属物質123との間で発生された散乱前後に波長の変化した光の強度を測定することができる。
【0029】
図1を続いて参照すると、前記カンチレバー121を移動しながら散乱前後に波長の変化した光の強度を様々な位置で測定する(S2)。前記カンチレバー121は駆動部130によって移動される。前記駆動部130は前記測定部120を微細に移動させる。前記駆動部130は圧電素子(piezo−electric device)であり得る。前記駆動部130によって前記先端122が前記基板160の上に位置する地点に基づく散乱された光の強度を測定してデータを得られる。
【0030】
図3乃至図5を参照すると、前記先端122の移動経路が図示される。前記先端122の移動経路は前記入射光領域内で散乱光の強度を獲得できるいずれの経路も可能である。本発明の一実施形態によれば、図3に示したようにA地点から始めて無作為的な間隔と方向へ移動してB地点まで5つの地点に対するデータを得られる。本発明の他の実施形態によれば、図4に示したようにC地点、即ち、最初前記先端122が位置された地点から始めて所定の間隔でD地点に到達される時まで25個の地点に対するデータを得られる。図5は図4のa−a’線に沿う散乱光の強度分布を示す曲線である。前記散乱光の強度分布は3次元的なガウシアン関数の形態であり得る。
【0031】
図1乃至図5を続いて参照すると、前記データがデータ処理部150へ伝送される(S3)。前記データ処理部150は前記データを利用して入射光領域内で入射光の強度が最高である地点Tを導出できる。本発明の一実施形態によれば、前記入射光の強度が最高である地点を導出する方法はガウシアン関数を利用することができる(S4)。本発明の一実施形態によれば、散乱光の強度が大きければ、入射光の強度も大きいので、前記基板160の上の前記先端122の位置と、前記先端122の位置で散乱光の強度を測定して得られた値とをガウシアン関数に代入して前記入射光の強度が最高である地点(ガウシアン関数グラフのピーク:T)を導出できる。
【0032】
図1乃至図5を続いて参照すると、前記カンチレバーの先端122を前記入射光の強度が最高である地点Tへ移動する(S5)。この場合、前記光源110の相対的位置は固定された状態である。前記カンチレバーの先端122が前記入射光の強度が最高である地点へ移動させる場合、以下に説明される前記基板160のスキャニングの時より感度、解像度が増大される。前記カンチレバーの先端122は前記駆動部130によって前記入射光の強度が最高である地点へ移動される。
【0033】
図1を続いて参照すると、前記カンチレバーの先端122が前記入射光の強度が最高である地点に固定された状態で前記基板160がスキャニングされる(S6)。前記スキャニングは前記カンチレバーの先端122と前記光源110との相対的位置が固定された状態で前記基板160を移動させて行われる。また、前記カンチレバーの先端122と前記光源110とを、相対的位置が固定された状態で同時に移動させ、前記基板160をスキャニングすることもできる。
【0034】
前記実施形態の説明は、本発明のさらに徹底した理解を提供するために図面を参照に例としてあげたものに過ぎないので、本発明を限定する意味で解釈されてはならない。そして、本発明の技術分野で通常の知識を有する者が、本発明の基本的な原理を逸脱しない範囲内で多様な変化と変更ができるのは勿論である。
【特許請求の範囲】
【請求項1】
光源から入射光が照射される基板の上の複数個の地点にカンチレバーの先端を提供することと、
前記入射光によって前記カンチレバーの先端と前記基板との間で発生された散乱光の強度を測定することと、
前記散乱光の強度をデータ処理部へ入力して前記入射光の強度が最高である地点を探すことと、
前記カンチレバーの先端を前記入射光の強度が最高である地点へ移動させることと、を含むことを特徴とするAFM測定方法。
【請求項2】
前記カンチレバーの先端と前記光源との相対的位置を固定した状態で前記基板を移動しながら、測定することをさらに含むことを特徴とする請求項1に記載のAFM測定方法。
【請求項3】
前記データ処理部はガウシアン関数を利用して前記入射光の強度が最高である地点を探すことを特徴とする請求項2に記載のAFM測定方法。
【請求項4】
前記データ処理部は前記複数個の地点と前記複数個の地点での前記散乱光の強度をガウシアン関数に代入して前記入射光の強度が最高である地点を探すことを特徴とする請求項3に記載のAFM測定方法。
【請求項5】
前記複数個の地点にカンチレバーを提供することは、
前記入射光を前記カンチレバーの先端に照射することと、
前記入射光が固定された状態で前記カンチレバーを移動させることと、を
含むことを特徴とする請求項1に記載のAFM測定方法。
【請求項6】
光源部と、
カンチレバーと前記カンチレバーの端部に提供された先端とを含む測定部と、
前記光源部から入射光が照射される基板の上の複数個の地点へ前記カンチレバーを移動させる駆動部と、
前記カンチレバーの先端と前記基板との間に発生された散乱光の強度を測定するセンサー部と、
前記散乱光の強度を受信して前記入射光の強度が最高である地点を探すデータ処理部と、を含むことを特徴とするAFM測定システム。
【請求項7】
前記カンチレバーの先端は金属物質で表面処理されていることを特徴とする請求項6に記載のAFM測定システム。
【請求項8】
前記駆動部は前記先端を前記入射光の強度が最高である地点へ移動させることを特徴とする請求項7に記載のAFM測定システム。
【請求項9】
前記データ処理部はガウシアン関数を利用して前記入射光の強度が最高である地点を探すことを特徴とする請求項8に記載のAFM測定システム。
【請求項10】
前記データ処理部は前記複数個の地点と前記散乱光の強度とをガウシアン関数に代入して前記入射光の強度が最高である地点を探すことを特徴とする請求項9に記載のAFM測定システム。
【請求項1】
光源から入射光が照射される基板の上の複数個の地点にカンチレバーの先端を提供することと、
前記入射光によって前記カンチレバーの先端と前記基板との間で発生された散乱光の強度を測定することと、
前記散乱光の強度をデータ処理部へ入力して前記入射光の強度が最高である地点を探すことと、
前記カンチレバーの先端を前記入射光の強度が最高である地点へ移動させることと、を含むことを特徴とするAFM測定方法。
【請求項2】
前記カンチレバーの先端と前記光源との相対的位置を固定した状態で前記基板を移動しながら、測定することをさらに含むことを特徴とする請求項1に記載のAFM測定方法。
【請求項3】
前記データ処理部はガウシアン関数を利用して前記入射光の強度が最高である地点を探すことを特徴とする請求項2に記載のAFM測定方法。
【請求項4】
前記データ処理部は前記複数個の地点と前記複数個の地点での前記散乱光の強度をガウシアン関数に代入して前記入射光の強度が最高である地点を探すことを特徴とする請求項3に記載のAFM測定方法。
【請求項5】
前記複数個の地点にカンチレバーを提供することは、
前記入射光を前記カンチレバーの先端に照射することと、
前記入射光が固定された状態で前記カンチレバーを移動させることと、を
含むことを特徴とする請求項1に記載のAFM測定方法。
【請求項6】
光源部と、
カンチレバーと前記カンチレバーの端部に提供された先端とを含む測定部と、
前記光源部から入射光が照射される基板の上の複数個の地点へ前記カンチレバーを移動させる駆動部と、
前記カンチレバーの先端と前記基板との間に発生された散乱光の強度を測定するセンサー部と、
前記散乱光の強度を受信して前記入射光の強度が最高である地点を探すデータ処理部と、を含むことを特徴とするAFM測定システム。
【請求項7】
前記カンチレバーの先端は金属物質で表面処理されていることを特徴とする請求項6に記載のAFM測定システム。
【請求項8】
前記駆動部は前記先端を前記入射光の強度が最高である地点へ移動させることを特徴とする請求項7に記載のAFM測定システム。
【請求項9】
前記データ処理部はガウシアン関数を利用して前記入射光の強度が最高である地点を探すことを特徴とする請求項8に記載のAFM測定システム。
【請求項10】
前記データ処理部は前記複数個の地点と前記散乱光の強度とをガウシアン関数に代入して前記入射光の強度が最高である地点を探すことを特徴とする請求項9に記載のAFM測定システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2012−530258(P2012−530258A)
【公表日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2012−515960(P2012−515960)
【出願日】平成22年4月5日(2010.4.5)
【国際出願番号】PCT/KR2010/002073
【国際公開番号】WO2010/147296
【国際公開日】平成22年12月23日(2010.12.23)
【出願人】(510203441)ナノフォーカス インコーポレイテッド (3)
【公表日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成22年4月5日(2010.4.5)
【国際出願番号】PCT/KR2010/002073
【国際公開番号】WO2010/147296
【国際公開日】平成22年12月23日(2010.12.23)
【出願人】(510203441)ナノフォーカス インコーポレイテッド (3)
[ Back to top ]