
AISメッセージを検出するための方法
【課題】AIS送信機の地域マップまたは世界マップを作成するために、衛星によるAISメッセージの検出を改善すること
【解決手段】AISメッセージを検出するための方法は、少なくとも1つのAISチャンネルにて衛星によって受信された信号を示すデジタルデータを提供するステップと、デジタルデータとフラグメント状疑似メッセージとを相関化することにより、デジタルデータ内の候補メッセージを識別するステップ(E18)とを含む。フラグメント状疑似メッセージは、送信時間および/または送信機の位置に依存し、AIS送信機のデータベース(26)の支援により決定される少なくとも1つのAISメッセージフラグメントを含む。
【解決手段】AISメッセージを検出するための方法は、少なくとも1つのAISチャンネルにて衛星によって受信された信号を示すデジタルデータを提供するステップと、デジタルデータとフラグメント状疑似メッセージとを相関化することにより、デジタルデータ内の候補メッセージを識別するステップ(E18)とを含む。フラグメント状疑似メッセージは、送信時間および/または送信機の位置に依存し、AIS送信機のデータベース(26)の支援により決定される少なくとも1つのAISメッセージフラグメントを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶およびブイのための衛星監視システムに関する。
【背景技術】
【0002】
自動識別システム(AIS)とは、20〜30海里(37〜56km)の距離内で船舶と沿岸局とナビゲーションサポートシステムとの間でショートメッセージを交換するためのシステムのことである。AISは、VHFの船舶モバイルバンドにおいて自己組織型時間分割マルチアクセス(SOTDMA)を使用している。(162.975MHzを中心とする)AIS 1チャンネルまたは(162.025MHzを中心とする)AIS 2チャンネルで通信が行われ、各チャンネルは、25kHzの幅を有し、交換されるメッセージは、所定の長さを有し、船舶の識別(ID)、船舶の位置、船舶の航路および船舶の速度のようなデータを含む。
【0003】
各通信チャンネルは、60秒の長さのフレーム内で時間分割されており、各フレームは、2250個のスロットに分割されており、通常の運用では1つのAISメッセージ(またはレポート)が各スロットを占有できるようになっている。通常のモードでは、各船舶は2つの通信チャンネルで自己のAISメッセージを交互に送信する。所定の船舶からのAISメッセージの頻度は、その船舶の速度に応じて決まる。その船舶が航行中であれば、2〜10秒ごとに1つのメッセージが送信され、船舶の速度が速くなればなるほど、連続する2つのメッセージの間のスペースは短くなる。船舶が停止している場合には、3分ごとにメッセージが送信される。このシステムに参加している異なるプラットフォームからのメッセージの間のインターバルは、例えばITU−R M.2084レポート「自動識別システムメッセージの衛星検出」に記載されている。
【0004】
船舶および沿岸局のAIS受信機は、近くにあるすべての船舶からのメッセージを受信し、これら船舶がローカル環境の詳細マップを作成できるようにしている。
【0005】
このAISは、船舶の時間分割アクセスを管理する中央TDMAコントローラがなくても運用される。各AISトランスポンダは、通信チャンネルをモニタし、各メッセージ内で次のメッセージを送信するために使用されるスロットを留保している。ローカルの地理的ゾーンでは、衝突解決プロトコルが同一スロットにおけるメッセージの衝突を防止している。
【0006】
実情は、AISメッセージを衛星で検出することではない。実際には低軌道を回る衛星のアンテナのフットプリントが、共にコーディネートされていない複数のローカルの地理的ゾーンを一般にカバーしている。従って、その衛星は同じスロットにおけるメッセージのランダムな衝突を観察するので、その結果、衝突するメッセージの1つ以上が失われることがあり得る。所定のAISメッセージの正しい検出がデコードされる確率は、衝突の数のレートが増加するにつれて低下する。この件に関するより詳細な情報は、ITU−R M.2084レポートに記載されている。本明細書も、衛星のキャパシティを改善するための可能な方法を示唆するものである。
〇衛星の動きの結果生じるドップラーシフトは、フットプリント内の送信機の位置に応じて決まるので、このドップラーシフトに基づき、複数のメッセージを弁別することができる。衛星の動きによって生じるドップラーシフトは、±4kHzに達し得る。それにもかかわらず、このアプローチではAISの規格は、船舶のTDMA送信機に対し、キャリア周波数に対して±500Hzの誤差を許容していることを念頭に入れておかなければならない。
〇所定の船舶によって送信される連続する2つのAISメッセージの間には情報の重要な冗長性がある。ITU−R M.2084レポートは、地上をベースとする局で特殊な処理をすることを見込んで、特に衛星が1回の通過する時間長さに対応する時間スロットにおいて、先に受信された信号のスキャンされたコピーと着信中のAIS信号とを連続的に相関化するために、2つのAISチャンネルで受信されたデータをリアルタイムでダウンロードすることにより、連続送信することを示唆している。
【0007】
米国特許第7,876,865号は、スペース内のAISメッセージを検出し、これらメッセージをデコードするためのシステムおよび方法を記載している。AIS信号はデジタル化されており、異なるドップラーシフトに対するAISメッセージのコードシーケンスに対応する所定信号とデジタルデータとを相関化することにより、AIS候補メッセージを識別している。相関化に使用されるメッセージコードシーケンスは、すべてのAISメッセージ、すなわち24ビットのトレーニングシーケンスおよび8ビットのスタートフラグに共通するメッセージのスタートに対応している。AIS候補メッセージの検出を改善するために、相関化に使用されるメッセージコードシーケンスは、既知メッセージの一部、例えば船舶識別子(この場合、MMSI番号10)の一部によって拡張できる。従って、米国特許第7,876,865号は、直前に検出された送信機からのメッセージを再検出しようと試みるステップに述べているITU−R M.2084レポートからのアイデアについて記載している。このアプローチは、同じ船舶からの連続する2つのメッセージのうちのかなり多数のビットが同じとなっているという事実を活用するものである。
【0008】
AISの詳細については勧告書IUT−R M.1371−4(04/2010)およびその付属書に記載されている。
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明の目的は、AIS送信機の地域マップまたは世界マップを作成するために、衛星によるAISメッセージの検出を改善することにある。
【課題を解決するための手段】
【0010】
本発明によれば、AISメッセージを検出するための方法は、少なくとも1つのAISチャンネルにて衛星によって受信された信号を示すデジタルデータを提供するステップと、デジタルデータとフラグメント状疑似メッセージとを相関化することにより、デジタルデータ内の候補メッセージを識別するステップとを含む。フラグメント状疑似メッセージは、送信時間および/または送信機の位置に依存すると共にAIS送信機のデータベースの支援により決定される少なくとも1つのAISメッセージフラグメントを含む。
【0011】
従って、本発明に係わる方法は、AIS送信機上の情報を含むデータベースに基づくものである。第1の場所において、この情報は衛星のオーバーパス(上空通過)中(すなわち当該デジタルデータに変換された信号の受信時)の衛星のフットプリント内に、どのAIS送信機を発見すべきかを決定するのに使用される。すべてのAISメッセージに共通するメッセージフラグメント(特にスタートフラグに続く可能性のあるトレーニングシーケンス)とデジタルデータとを相関化することにより、デジタルデータ内のAISメッセージをサーチする代わりに、本発明は、信号受信時に衛星によってカバーされているゾーン内において発見すべき(またはデータがリアルタイムで評価されない場合には、発見された)既知の特定の送信機からのAISメッセージをデータバンクからデジタルデータ内でサーチすることを提案するものである。従って、フラグメント状疑似メッセージは、データベースの助けにより、かつ衛星の軌跡から(例えば、時間を関数とする衛星の位置から)予想可能なメッセージフラグメントから成る。例えば各AISメッセージは送信機を不明確でないように定義するフィールド「ユーザーID」(通常は船舶のMMSI番号)を含む。トレーニングシーケンスとスタートシーケンスとデジタルデータと相関化するためのフィールド「ユーザーID」を含むフラグメント化されたメッセージを使用することにより、特定のAIS送信機から発信されたAISメッセージを明瞭にサーチできる。ノイズに対する相関化ピークの高さは、フラグメント化されたメッセージのサイズ(ビット数)が大きくなるにつれ高くなることが理解できよう。本発明によれば、候補メッセージのアクティーブ部分も予想する。ここで、「アクティーブ」部分またはフィールドなる用語は、例えば位置、ナビゲーションなどに関する情報がメッセージごとに変わる可能性が高いAISメッセージ部分を意味するものと理解する。これまで示したように、フラグメント状疑似メッセージのアクティーブ部分は、送信時間、(例えば、「タイムスタンプ」、「UTC年」、「UTC月」、「UTC日」、「UTC時」、「UTC分」および/または「UTC秒」フィールドからのビット)および/または送信機の位置(例えば、フィールド「経度」および/または「緯度」からのビット)に依存するAISメッセージの少なくとも1つのフラグメントを含む。種々のAISメッセージフィールドについては、勧告書ITU−RM.1371−4(04/2010)およびその付属書に記載されている。
【0012】
本発明の方法の好ましい実施形態によれば、フラグメント状疑似メッセージは、送信機の位置に依存する少なくとも1つのAISメッセージフラグメントを含む。このメッセージフラグメントを合成することは、
〇前記信号の受信時に衛星によるサービスを受けるゾーン内に位置するAIS送信機を、AIS送信機のデータベースに基づいて識別するステップと、
〇前記識別された送信機の、前記データベースに記憶されていた位置に基づき、送信機の位置に応じた少なくとも1つのAISメッセージフラグメントを決定するステップとを含む。
【0013】
送信機の位置に応じて決まる少なくとも1つのAISメッセージフラグメントは、「経度」フィールドからの最大位ビットおよび/または「緯度」フィールドからの最大位ビットを含む。ここで、同一船舶の連続する2回の観察の間で、船舶の位置は少なくともほぼ同じであると仮定する。船舶の新しい位置は、その船舶の最後の既知の位置を中心とする円内に予想でき、この新しい位置は、船舶の最高速度および最終メッセージから経過した時間に対応する。その他のパラメータ、例えば船舶の目的地、その船舶の最終船首方位、その船舶の最終速度、その船舶の最終ナビゲーションステータスなどが既知である場合(例えばデータバンク内に記憶されている場合)、予想は更に正確になり得る。ある送信機が2〜10秒ごとにその送信機のAISメッセージを送信すると仮定した場合、衛星の同じオーバーパス中に受信されるAISメッセージに対する位置の推定値は、極めて正確となる。衛星が2回オーバーパスする間のある時間(例えば1〜2時間)の間、送信機が観測されないことがあり得る。推定される位置がより正確になればなるほど、フィールド「経度」および「緯度」のより多くの最大位ビットが既知となる。
【0014】
デジタルデータには(例えば衛星により)タイムスタンプを押すことが好ましい。こうして、デジタルデータのタイムスタンプに基づき、送信時間に依存する少なくとも1つのAISメッセージフラグメントを決定できる。送信時間に依存する少なくとも1つのAISメッセージフラグメントは、特に「タイムスタンプ」フィールドからのビット、すなわち「UTC年」、「UTC月」、「UTC日」、「UTC時」、「UTC分」および/または「UTC秒」フィールドからのビットを含む。
【0015】
フラグメント状疑似メッセージは、データベース内で識別された送信機固有の1つ以上のスタティックフィールドからのビットを含むことが好ましい。ここで、「スタティック」フィールドなる用語は所定のAIS送信機に対してメッセージごとにコンテントが変化しないフィールドを意味するものと理解されよう。スタティックフィールドの例として、「ユーザーID」フィールド(MMSI数を含む)、「AISバージョンインジケータ」フィールド、「IMO番号」フィールド(国際船舶協会番号)、「コールサイン」フィールド、「ネーム」フィールド(船名)、「船舶のタイプおよび積荷のタイプ」フィールド、「位置に対する全寸法/基準」フィールド、「電子位置固定デバイスのタイプ」フィールドからのビットがある。
【0016】
送信時間または送信機の位置に依存するフラグメントとは別に、フラグメント状疑似メッセージとして、データベース内で識別された送信機に固有の1つ以上のアクティーブフィールド、例えば「RAIMフラグ」フィールド(送信機自律完全調節)、「特殊操縦インジケータ」フィールド、「推定到着時間」フィールド、「現在の喫水」フィールド、「目的地」フィールド、「ナビゲーションステータス」フィールド、「地上のコース」フィールド、「地上の速度」フィールドおよび/または「通信ステータス」フィールドからのビットがある。
【0017】
デジタルデータ内の候補メッセージが一旦識別された場合、前記候補メッセージをデコードし、デコードされたメッセージ内に含まれる情報を使ってAIS送信機の前記データベースを更新することが好ましい。
【0018】
デジタルデータと複数のフラグメント状疑似メッセージとを相関化することにより、候補メッセージを識別することが好ましい。実際に、特にメッセージ固有の信号が極めて微弱であるか、ノイズが多い場合には、候補メッセージを識別するためにはいくつかの想定を検討しなければならないことがある。その理由の1つは、候補メッセージの予想可能なフラグメントがギャップによって分離される得ることにある。基本的には、AIS規格はフィールドの固定された公称長さを定義しているので、ギャップの長さは既知である。しかしながら、スタートフラグまたはエンドフラグと同じビットシーケンスの発生を防止するために、スタッフィングビットを挿入しなければならない場合、フィールド長さが、変わり得る。アプリオリに未知のように、ギャップ(候補メッセージの一部分)がスタッフィングビットを含む場合、候補メッセージ内にスタッフィングビットが存在するか否かを検査するように、複数のフラグメント状疑似メッセージを設計でき、異なるフラグメント状疑似メッセージに対応する相関性をシリアルにおよび/またはパラレルに計算できる。
【0019】
信号受信時の衛星の位置は種々の方法で得ることができる。例えば、衛星には測位システム(GPS、ドリス、ガリレオ、グロナス、コンパスまたはその他)を装備させることができ、こうして衛星はデジタルデータを衛星の軌跡データにリンクできる。別の可能な方法として、衛星コントロールセンター(TT&Cセンター:テレメートリー、トラッキングおよびコマンド)または例えばレーザー処理測定システムを使用する監視ネットワークにより、衛星の軌跡データを得る方法がある。更に別の可能な方法として、デジタルデータ内の1つ以上のAISメッセージを識別する送信機に対する三角測量(距離を測定することにより)により、信号受信時の衛星の位置を推定する方法がある。従って、受信したAISメッセージに基づき、衛星の軌跡を再構成できる。
【0020】
デジタルデータとフラグメント状疑似メッセージとを相関化するためには、フラグメント状疑似メッセージのスタート点とAIS時間フレームの時間インターバルのスタート点とを同期化することが好ましい。デジタルデータにはタイムスタンプが押されており、AISフレームは、UTC時間と同期化されているので、時間的な不確実性の範囲は、AISの同期化ジッター(±3ビットに対応する±312μs)に船舶の位置の不確実性を補償するための所定のバッファを加えた値に低減される。全体として見れば、時間的な不確実性の範囲は、UTC時間に対して±6ビットとなると想定できる。
【0021】
デジタルデータとフラグメント状疑似メッセージとを相関化するために、フラグメント状疑似メッセージに対する計算されたドップラーシフトを送信機の位置の関数として補償することが好ましい。1つのAISメッセージのドップラーシフトは、衛星とメッセージ送信機との間の相対的速度に応じて決まる。地上基準フレームでは、AIS送信機の速度を無視できるので、ドップラーシフトを衛星の基準フレーム内の送信機の位置の関数として表記できる。低軌道衛星の場合、ドップラーシフトは、±4.5kHzのインターバル内に含まれることになる。送信機の位置は、少なくとも最小100km(最後に検出された位置を中心とする約100kmの半径)であると判っており、衛星の軌跡も既知であると仮定した場合、ドップラーシフトの不確実性は、500Hz未満となる。しかしながら衛星の高さが低い(ターゲット方向と水平線の間の角度が小さい)場合、ドップラーシフトの不確実性は、通常±100Hzのオーダーとなる。
【0022】
しかしながらAIS規格は、±500Hzの送信機のキャリア周波数に対する誤差を許容しているので、周波数レンジ内の全不確実性は、±1000Hz(ドップラーシフトの不確実性+キャリア周波数に対する誤差)となる。所定のAIS送信機では、キャリア周波数に対する誤差は、通常時間に対して基本的には一定である。従ってこの誤差は、周波数レンジ内でのサーチを考慮できるようにデータベース内に記憶することが好ましい。従って、データベースからキャリア周波数に対する誤差を抽出できるAIS送信機の場合、周波数レンジ内の不確実性はドップラーシフト(±100Hz)の不確実性だけとなる。データベース内に所定のAIS送信機のキャリア周波数に対する誤差がセーブされていない場合、相関性ピークを検出した周波数から、および(衛星並びに送信機の位置を使って得た)理論的ドップラーシフトからおよび将来使用するためにこの誤差をデータベース内に記憶することにより、この誤差を計算できる。
【0023】
最後に、フラグメント状疑似メッセージとデジタルデータとを相関化するために、データベース内に記憶されているAIS送信機の変調指数も同じように考慮することが好ましい。特定のAIS送信機のメッセージをサーチするには、その変調指数(AISに対する公称値:0.5)を知ることが望ましい。従って、この変調指数がアプリオリに未知である場合、変調指数(例えば0.5±0、1のレンジにある)のための複数の想定をするための相関化を行うことができ、相関性を最大にする変調指数の値はデータベース内に記憶される。
【0024】
本発明の更なる特徴は、コンピュータによる実行時にコンピュータに上記方法を実行させるコンピュータで実行可能な命令を含むコンピュータプログラムにも関する。本発明の更に別の特徴は、プログラム命令を含むデータ記憶メディア(例えばランダムアクセスメモリまたはリードオンリーメモリ、CD−ROM、USBキー、ハードディスクなど)を含むコンピュータプログラム製品にも関する。
説明のために添付図面を参照して、以下に示す好ましい実施形態の詳細な説明から、本発明の上記以外の特性および特徴が明らかとなろう。
【図面の簡単な説明】
【0025】
【図1】AISメッセージのための衛星検出システムの全体のアウトライン図である。
【図2】AISメッセージの構造の図である。
【図3】本発明の第1実施形態に係わるAISメッセージの検出方法の原理を示す略図である。
【図4】AISメッセージを検出するためのフラグメント状疑似メッセージの図である。
【図5】船舶の新しい位置を予測するための原理の図である。
【図6】フラグメント状疑似メッセージのうちのメッセージフラグメント(既知のビット)およびギャップ(アプリオリに未知のビット)の図である。
【図7】LEO衛星のフェーズドアレイアンテナのフットプリントの略図である。
【図8】本発明の第2実施形態に係わるAISメッセージの検出方法の原理を示す略図である。
【発明を実施するための形態】
【0026】
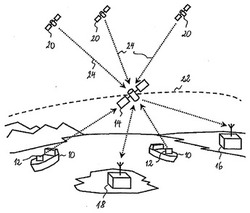
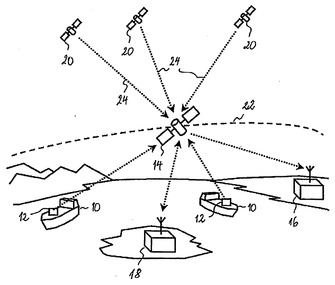
図1は、AISメッセージのための衛星検出システムの全体のアウトラインを示す。各々にAISトランシーバ12が装備されている複数の船舶10は、船舶の識別符号(MMSI番号)、WGS84座標における局所限定化(世界ジェオデティックシステム、1984年改訂)、船首方位、速度およびその他のステータス情報のようなデータを含むAISメッセージを送信し、近くにある船舶および沿岸局のAIS受信機によりこれらメッセージが受信される。こうして各船舶10は、(約20〜30海里の半径内の自己の)ローカル環境におけるAIS送信機の詳細マップを作成でき、このマップはレーダーおよびその他のナビゲーション援助装置が供給する情報を補足する。
【0027】
これらAISメッセージは、低地球軌道内、すなわち160〜2000kmの間の高度に存在し得る(LEO)衛星14によっても受信できる。1つの低軌道衛星のアンテナのフットプリントは、AISがメッセージの衝突を防止するセルの大きさを大幅に超えるような広さとなっている地理的ゾーンを一般にカバーする。これらセルは一般に、セル間ではコーディネートされていないので、衛星が受信するAIS信号は時間および周波数がオーバーラップするメッセージを含み得る。特に船舶密度が高いゾーンで問題が生じる。
【0028】
(162.975MHzを中心とする)AISチャンネル1または(162.025MHzを中心とする)AISチャンネル2(以下、これらチャンネルをAIS信号と称す)が衛星14によって受信され、デジタル化される。このように得られたデジタル信号にはタイムスタンプが押され、この信号は、ダウンリンクを通して1つ以上の地上局16へ送信される。船舶監視システムは、複数のLEO衛星と複数の地上局とを含むことができることに留意すべきである。これらLEO衛星は、1つ以上の衛星コントロールセンター18によって制御されるが、明確にするために、以下、1つのLEO衛星について述べる。複数の衛星を使用する場合、複数の衛星によるデータ処理をパラレルに実行することが好ましい。
【0029】
このLEO衛星14には、地球測位システム、例えばGPS受信機を装備することが好ましい。こうすると、衛星はGNSS衛星20から発信された無線ナビゲーション信号24によりその位置を決定できる。次に、AIS信号を示すデジタルデータを、LEO衛星の軌跡22に、全単射的にリンクできる。各データシーケンスが、LEO衛星の1つのインスタンスおよび1つの位置に明白に属すようにすることができる。
【0030】
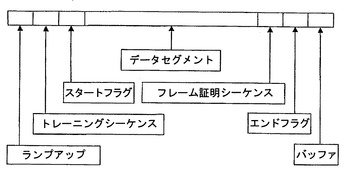
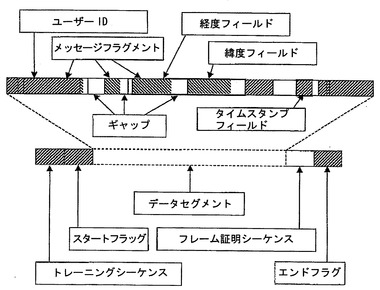
図2は、AISメッセージの構造の図である。各AISメッセージは256ビットを含み、ランプアップフィールド(8ビット)と、トレーニングシーケンス(24ビット)と、メッセージスタートフラグ(8ビット)と、データシーケンス(168ビット)と、周期的冗長性チェック(16ビット)と、メッセージエンドフラグ(8ビット)と、バッファ(24ビット)とにサブ分割されている。勧告書ITU−R M.1371.4は、スタートバッファだけでなくエンドバッファについても述べている。本明細書では、これら2つのフィールドを1つのフィールドとして扱う。
【0031】
AISメッセージのデータシーケンスも所定の長さのいくつかのフィールドにサブ分割されている。データシーケンスおよび送信されるフィールドの構造は、メッセージのタイプに応じて決まる。各AISメッセージは、すべてのAISメッセージに共通するビットシーケンス、例えばランプアップフィールドと、トレーニングシーケンスと、スタートフラグと、エンドフラグとを含むことに留意すべきである。あるタイプのAISメッセージしか検討しない場合、フィールド「IDメッセージ」も既知である。その他のビットシーケンスは送信機に固有のものである。これらのうちで、送信機において、不定期間の間でプログラムされる送信機固有の「スタティック」なビットシーケンスとメッセージごとに変わり得る送信機固有の「ダイナミック」なビットシーケンスとを区別することもできる。
次の表は、送信機固有の「スタティック」なビットシーケンスを示す。
【表1】

【0032】
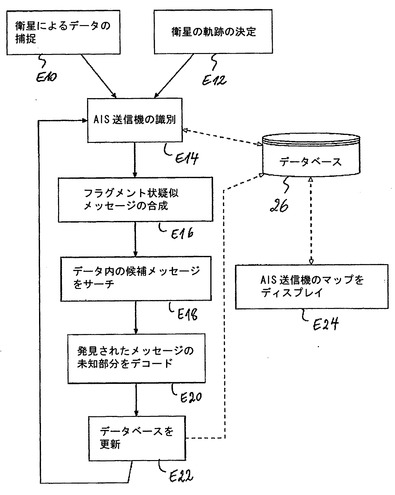
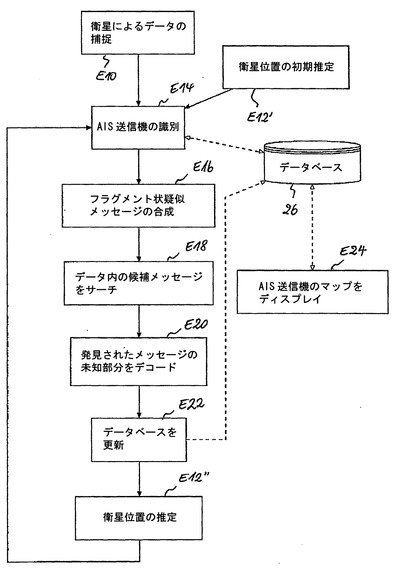
図3は、第1の好ましい実施形態に係わる本発明の方法のための原理の略図を示す。本発明は、メッセージを送信したAIS送信機が既知であり、かつ更にその送信機に関する補足情報、特にその位置が入手できる場合のAISメッセージのデータシーケンスの所定のビット数を予測できるということを活用するものである。この予測可能なビットは送信機固有の「スタティック」なフィールドのビットを特に含む。その理由は、AIS送信機のデータベース内にこれらフィールドのコンテントをセーブするだけでよいからである。その他の予測可能なビットは、送信機固有の「ダイナミック」フィールドの所定のビットである。例えばフィールド「経度」および「緯度」の最大位ビットを含むが、視界から送信機が消えることがないよう十分高い頻度で当該送信機の位置が発見されることが条件となる。
【0033】
上記のように、LEO衛星のレベルでデータを補足する(ステップE10)。タイムスタンプが押されたデジタルデータを衛星14へのダイレクトリンクにより地上局16内に位置し得るデータセンターへ送信するか、または地上局16と通信状態にある別のロケーションへ送信する。
【0034】
AISメッセージを検出するために、LEO衛星から(直接または間接的に)発信されたデジタルデータと通常トレーニングシーケンスとを相関化する。このシーケンスはかなり短いのでノイズの多い信号が存在している場合、相関化ピーク、従って候補メッセージを検出することはできない。デジタルデータ内でまだ検出されていないAISメッセージのうちのより多くの数のビットを予想するためには、オーバーパスの時間に衛星によってカバーされているゾーン内でAISメッセージを送信できたAIS送信機を識別する。
【0035】
これを行うには、まず最初に衛星の軌跡を決定しなければならない(ステップE12)。例えば測位システムを助けにして衛星のレベルで軌跡(時間を関数とする位置)を計算することが好ましい。この場合、AIS信号データと同じ通信リンクを通して衛星の軌跡に関するデータをデータセンターへ送信することができる。これとは異なり、データセンターが任意の通信リンクを通して衛星制御センター18(TT&Cセンター)からのLEO軌跡データを受信することができる。
【0036】
デジタルデータ内に含まれるAISメッセージを送信することができたAIS送信機を識別するために(ステップE14)、AIS信号の受信時に衛星の位置を決定する。次に、データベース26にセーブされている最終位置は、衛星位置のまわりの所定ゾーン内にあるAIS送信機を示すAIS送信機26のデータベースにコンサルトする。この所定のゾーンは、衛星のアンテナ(単数または複数)のフットプリントおよび可能な場合には周辺ゾーンも含むことができる。この周辺ゾーンは、データベースにセーブされた最終位置がフットプリントの外部にあり、かつ船舶位置が検出されてから経過した時間内に進入できる程度にフットプリントに十分近い船舶を考慮する。
【0037】
デジタルデータ内に含まれるAISメッセージを送信できた各AIS送信機に対し、データベース26に含まれる情報に基づき予測できるビットを含む、1つまたは複数のフラグメント状疑似メッセージを合成する(ステップE16)。次に、デジタルデータ内の候補メッセージとフラグメント状疑似メッセージとを相関化することにより、その候補メッセージのサーチを実行する(ステップE18)。以下、これらステップについてより詳細に説明する。
【0038】
デジタルデータ内の候補メッセージが一旦識別されると、その未知部分(すなわち、十分な確度で予想できないビットシーケンス)をデコードする(ステップE20)。この未知の部分は、既知の技術、例えばビタルビアルゴリズムの助けによってもデコードしてもよい。次に、デコードされたメッセージ内に含まれる情報を用いてデータベース26を更新する(ステップE22)。
【0039】
次のデジタルデータまでこの方法を続ける。衛星の位置が変化するにつれ、衛星フットプリントに進入したり、このフットプリントから離れる新しいAIS送信機を識別する。
【0040】
デジタルデータへの加入者は、このデジタルデータにアクセスすることができ、特にAIS送信機のマップのディスプレイを得ることができる。(ステップE24)。
【0041】
AIS送信機が衛星のフットプリントから離間するとき、AIS送信機は、AISメッセージの衛星検出システムの同じ衛星または別の衛星の次のオーバーパスまで、観察されない状態のままとなる。4台のLEO衛星が配置されたコンステレーションでは、ローカルの無観察時間は、2時間の長さとなり得る。このことは、衛星のフットプリントに進入する送信機に対してセーブされるデータが、平均2時間古いことを意味する。フラグメント状疑似メッセージを合成する際には、この時間を考慮することが好ましい。デジタルデータ内の候補メッセージを識別するには複数の仮想が必要となり得る。これら想定は、パラレルにおよび/またはシリアルに検討してよい。シリアルに検討することを選択するときには、最も可能性の高い確率の想定でスタートしなければならず、検出に失敗した場合には、確率の降順で次の想定を続けなければならない。
【0042】
例えば送信機が移動しているとデータベースにセーブされている最終ナビゲーション状態が示しているような所定のAIS送信機に対しては、タイプ1のAISメッセージを検出しようとすることが好ましい。この場合、デジタルデータと相関化するためのフラグメント状疑似メッセージを正しく構成する。失敗した場合(例えば相関性ピークが検出されない場合)、時間および周波数の同じ想定を有する同じ送信機からのタイプ3のAISメッセージの検出を試みることができる。データベース内にセーブされている最終ナビゲーション状態が移動していないことを示すAIS送信機を探すときには、最初にタイプ3のAISメッセージを検出しようとする。失敗した場合、時間および周波数の同じ想定を有する同じ送信機からのタイプ1のAISメッセージを検出することを試みることができる。カバーされている地理的ゾーン内に存在すると考えられるすべての送信機から、タイプ5のメッセージをパラレルに検出しようと試みることが好ましい。
【0043】
次の表は、タイプ1、2または3のAISメッセージに対する予測可能なビットを示す。一般的に、予測可能なビット数は予想に使用されるモデルの複雑さ、および予想時のデータベースの鮮度に応じて決まる。一般に送信機固有のスタティックフィールドのビットはすべて予想可能である。これと対照的に、メッセージごとに変化し得る送信機固有のダイナミックフィールドに対しては、データベースの鮮度は、これらフィールドのうちのどれだけ多くのビットを予想できるかを決定する。
【表2−1】
【表2−2】
【0044】
図4は、AIS送信機が通信ステートSOTDMAとなっている固定された(アンカー係留されているかまたはつながれている)船舶からのタイプ1のAISメッセージを検出するためのフラグメント状疑似メッセージの図である。予想可能なビットシーケンス(メッセージフラグメント)はハッチングされている。これら予想可能なビットシーケンスはいくつかのフィールドにわたって拡張できる。所定のフィールド、例えば経度および緯度のフィールドに対しては、ビットの一部を十分な確度で予想できる。
【0045】
次の表は、(固定された基地局から送信された)タイプ4のAISメッセージに対する予想ビットを示す。
【表3】
【0046】
次の表は、(AISフレーム内の連続する2つのスロットにわたって拡張された)タイプ5のAISメッセージに対する予想可能なビットを示す。
【表4】
【0047】
次の表は、タイプ21のAISメッセージに対する予想可能なビットを示す(ナビゲーション支援局によって送信され:AISフレーム内の連続する2つのスロットにわたって延びている)ことを示す。
【表5】
【0048】
従って、AIS送信機が既知の場合、各AISメッセージは予想可能なビットのシーケンスで開始する。フラグメント状疑似メッセージの第1フラグを示すこのビットシーケンスは、特に「トレーニングシーケンス」、「スタートフラグ」、「IDメッセージ」、「リピートインジケータ」および「IDユーザー」の各フィールド、すなわち少なくとも70ビットを含む。識別すべきメッセージのタイプによっては、この第1メッセージフラグメントは大幅に大きくなり得る(タイプ4のメッセージの場合は110ビット、タイプ5のメッセージに対しては306ビット)。
【0049】
上記表では、可能なスタッフィングビットは考慮していない。各AISメッセージでは、エンドメッセージフラグと同じビットシーケンス(すなわちビットシーケンス[01111110])が発生することを防止するためにデータシーケンスおよびフレームチェックシーケンス内にスタッフィングビットが自動的に挿入される。AIS送信機の側では、このことは出力ビットストリーム内に連続する5つの1が発見された場合、これらの1が5つ連続した後にゼロを挿入することを意味する。受信側では1が5つ連続した後の最初のゼロを除去しなければならない。これらスタッフィングビットは、検出すべきメッセージの既知の部分だけでなく、未知の部分も長くし得る。従って、異なる可能なケースを考慮するためにデジタルデータと相関化されたフラグメント状疑似メッセージ内で、ギャップ(未知の部分)の長さを変えなければならない。
【0050】
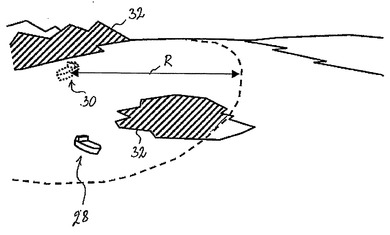
フラグメント状疑似メッセージは、AIS送信機の送信時間(例えばタイプ1、2、3または21のメッセージのフィールド「タイムスタンプ」)および/または位置(例えばタイプ1、2、3、4および21のメッセージのフィールド「経度」および「緯度」)に応じて決まる少なくとも1つのメッセージフラグメントを含む。送信機の位置に応じて決まるメッセージフラグメントのビットを推定(予想)するには、当該AIS送信機の(データベースにセーブされている)既知の最終位置を考慮しなければならない。いくつかのシナリオが可能である。特定の送信機からの最後にデコードされたAISメッセージと同じ送信機からの識別すべきAISメッセージとの間で、ナビゲーションステートが変化しないと想定することが好ましい。このような想定は、すべてのケースで必ずしも真であるわけではないが、当該観察されていない時間の間(長くて数時間の間)では、この想定は極めてあり得ることである。従って、船舶がアンカー係留されているか、つながれていることをデータベースが表示した場合、船舶の位置は(10メートル内の)同じ位置に留まるとの想定に基づき、フラグメント状疑似メッセージを合成する。相関ピークを検出できなければ、船舶が航行中であると仮定する。船舶が航行中であることを最後のナビゲーションステートが表示した場合、まず最初にこの想定を検討しなければならない。図5に示されるようなこのようなケースでは、最後の既知の位置30のまわりの円の内側に、船舶28の新しいアプリオリに未知の位置を見つけなければならない。ここで、円の半径Rは、最後にデコードされたAISメッセージからの時間ΔTと船舶の最大速度vmaxとの積である。すなわちR=ΔT×vmaxである。船舶の最大速度(この値がデータベースに記憶されている場合)をデータベース内で見つけることができる。最大速度が未知である場合、その速度は所定のスレッショルド値(例えば50km/h)よりも低いと想定することができる。円の内部にある陸地32の面積は無視できる。(しかしながら当該船舶が河川のボートである場合、明らかにナビゲート可能な水路を排除してはならない。)R=100kmの場合の新しい位置の精度では9ビット、フィールド「経度」およびフィールド「緯度」では8ビットを予想できる。データベースで船舶に関する別の情報を入手できる場合、特にタイプ5のメッセージのフィールド「船舶のタイプおよび積み荷のタイプ」、「推定到着時間」および「目的地」が入手できる場合、予想精度を改善できる。例えば、当該船舶が過去のルートの知られているフェリーであると判っている場合、その船舶は恐らくこれらルートのうちの1つにあり、位置の不確実性ゾーンは、かなり低下する。到着推定時間および到着港が判っている場合、このことは、この船舶がとるルートに関する予想も可能にする。
【0051】
次にデジタルデータ内の候補メッセージに対するサーチステップの好ましい実行(ステップE18)について、より詳細に説明する。これらデジタルデータは、予想ビットのセグメント(メッセージフラグメント)と一義的に相関化されることに留意すべきである。未知のビット(異なるメッセージフラグメント間のギャップ)とAIS信号のデジタルデータとは相関化されない。デジタルデータとUTC時間との同期化およびAIS送信機の位置の最小近似知識により、各メッセージからのAISメッセージの伝搬遅延時間を計算できる。各AIS送信機がそのメッセージをUTC時間に(直接または間接的に)同期化する際、伝搬遅延時間を考慮することにより、±6ビット(時間的な不確実性レンジ)の精度で所定の送信機からAISメッセージを開始できるインスタンスを知る。この時間的不確実性のレンジは、船舶の位置の不確実性を補償するためにAISの同期化ジッター(±3ビットに対応する±312μs)+所定のバッファから構成される。相関化のために時間サーチレンジは、時間的不確実性レンジ(例えば12ビット)に対応する。AISフレームの各タイムスロットのスタート時に相関化が実行される。
【0052】
送信機のキャリア周波数に対するドップラー効果および誤差を検討するために、キャリア周波数のまわりのサーチ周波数レンジにわたって相関化方法を実行する。データベース内にキャリア周波数に対する誤差が含まれているような送信機からのAISメッセージを探した場合、この誤差を補償することができ、周波数の残留ドメイン内における不確実性は、ドップラーシフトの不確実性(通常±100Hz)だけとなる。従って、周波数サーチインターバルは、一般に200Hzの幅となる。
【0053】
ハーフビットの各積分の間でのデジタルデータとフラグメント状疑似メッセージとの間の遅延時間を変えることにより、各相関化演算は、24回の積分を含む。周波数サーチインターバルを(25Hz幅の)8つのセルに分割することにより、(以下の変調指数のための異なる想定を含めない)時間/周波数サーチスペース内のセルごとに、総計192回の積分が行われる。周波数軸上の不明確性を生じることなく、主たる相関化ピークを検出できるように、周波数におけるセルの幅を選択することが望ましいことに留意すべきである。
【0054】
キャリア周波数に対するシフトが一旦判ると、理論的なドップラーシフト量を減算でき、残留誤差を使ってデータベース内にセーブされているキャリア周波数に対する誤差を補正できる。
【0055】
時間/周波数サーチスペースの各セルに対する変調指数の仮想のための相関化方法は、次のステップを含むことが好ましい。
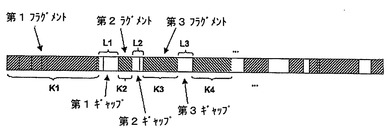
ステップa.2つの可能な位相(NRZIコーディングされたデータ)を使用することにより、デジタルデータと(K1の既知のビット(図6参照)を有する)第1メッセージフラグメントとを相関化するステップ。ステップaから2つの相関化の結果が得られる。
ステップb.デジタルデータと(K2の既知のビットを有する)第2メッセージフラグメントを相関化するステップ。第1ギャップ(第1フラグメントと第2フラグメントとの間の未知のビット)内の可能なスタッフィングビットを考慮するためには、第1フラグメントから異なる距離に相関化のスタート点を位置させなければならない。第1ギャップの未知のビットの数は、既知である(L1)。従って、第1ギャップの長さは、L1+スタッフィングビットの数となる。後者の数は未知であるので、異なる可能なギャップ長さを試みなければならない(L1、L1+1、....、L1+B1、ここでB1はL1ビットのシーケンス内のスタッフィングビットの最大数である)。NRZIコーディングを考慮するために2つの可能な位相に対して各相関化を実行しなければならない。ステップbからは2×B1の相関化結果が得られる。
ステップc.デジタルデータと(K3の既知のビットを有する)第3メッセージフラグメントを相関化するステップ。第2ギャップ(第2フラグメントと第3フラグメントとの間の未知のビット)内の可能なスタッフィングビットを考慮するためには第2フラグメントから異なる距離に相関化のスタート点を位置させなければならない。第2ギャップの未知のビットの数は、既知である(L2)。従って、第2ギャップの長さはL2+スタッフィングビットの数となる。後者の数は未知であるので、異なる可能なギャップ長さを試みなければならない(L1、L1+1、....、L1+B2、ここでB2はL2ビットのシーケンス内のスタッフィングビットの最大数である)。NRZIコーディングを考慮するように2つの可能な位相に対する各相関化も実行しなければならない。ステップbからは2×B2の相関化結果が得られる。
ステップd.等々
ステップe.パラレルな処理技術を採用する場合、ステップa、b、cおよびdの可能な組み合わせに従い、異なる相関化の結果を加算しなければならない。従って、テストされる想定の数は、2×(2×B1)(2×B2)....となる。
ステップf.検討された想定のうちで、(フラグメントの組に対し)最大の相関化ピークを有する結果のサーチを行う。更に確実な検出をするには、相関化ピークが、経験的に強化された(ノイズに対する)分析的にあらかじめ定められた所定のスレッショルドを超えていなければならない。
【0056】
すべての想定(すべての可能な組み合わせ)を検討する代わりに、ステップa、b、cおよびdに対し、各メッセージフラグメントに対して最大の相関化ピークを発生した想定だけを維持してもよい。このオプションには、フラグメントの正しい組み合わせに到達することができないという、より高いリスクが存在する。この欠点を緩和するために、ステップa、b、cおよびdを通過する際に、最大の相関化ピークを有する限られた数の組み合わせを保持できる可能性があり、その他の組み合わせは廃棄する。
【0057】
LEO衛星は、各々がAIS信号を受信する一群の基本アンテナ(フェーズドアレイアンテナを構成する)を含むことが好ましい。次に、これらアンテナ群の意図する指向性が得られるように、異なるアンテナが受信した信号を変換することによって得られるデジタルデータを組み合わせることができる。この場合、アンテナ群によってカバーされる海抜におけるゾーンを人工的に縮小し、一度に検討すべきAIS送信機の数(および衝突メッセージの数)を減少できる。換言すれば、このゾーンの外の地理的ゾーンを縮小しながら、所定の地理ゾーンに対するアンテナの感度を高めることができる。次に、異なるデジタルデータフローの間の位相関係を変えることによって、アンテナの群のフットプリントをスイープできる。この周波数選択技術(狭周波数セル)によって、干渉する信号のパワーを大幅に低下させることが可能となっている。
【0058】
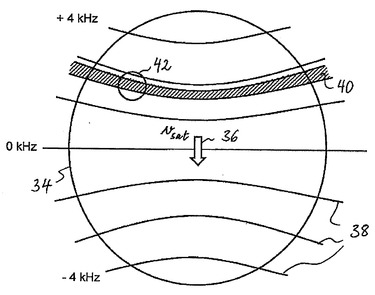
図7は、衛星のアンテナの群のフットプリント34を略図で示している。衛星は(矢印36が示す)速度vsatで移動し、これによって衛星が受信するAIS信号のドップラーシフトが生じる。参照番号38により等ドップラーラインが示されている。ハッチングのつけられたバンド40は、複数の周波数の1つのセルに対応している。フェーズドアレイアンテナにより、検出ゾーンをフットプリント34よりも実質的に狭いローカルゾーン42に縮小することが可能となっている。次に、データベース内に記録された最終位置の結果が、このローカルゾーン42に存在し得る船舶からのAISメッセージを検出する試みを行うことができる。ローカルゾーン42の内部では、ドップラーシフトの範囲はフットプリント34に対してかなり狭く、従って各ローカルゾーン42に対してテストすべき周波数セルの数は大幅に減少する。
【0059】
図8は、第2の好ましい実施形態に係わる本発明の方法に対する原理の略図を示す。この図の方法のステップと同一または類似のステップを示すのに、同じ参照番号が使用されている。前の例と同じように、LEO衛星の高さでデータを収集する(ステップE10)。コンピュータセンターにはタイムスタンプが押されたデジタルデータを送信する。図3の方法と異なる主な違いは、衛星の位置を送信機の位置までの距離を三角測量で得ている点にあり、送信機のAISメッセージはデジタルデータで識別される。LEO衛星に地球測位システムが装備されていない場合、このシステムが故障している場合、または制御センターにより衛星に関する軌道データが伝送されていない場合、本発明のこの変形例は重要である。
【0060】
この方法を開始するには、デジタルデータ内に含まれたAISメッセージを送信できたAIS送信機を識別する(ステップE14)。初期の可能性を低減できるようにするには、衛星位置の初期推定値を入手することが好ましい(ステップE12’)。衛星位置の初期推定値が入手できない場合、(相関化のためのAISメッセージすべてに共通するスタティック部分だけを使用することにより)従来の方法でデジタルデータ内の最初のAISメッセージを検出することを試みることができる。最初のAISメッセージが一旦デコードされると、受信された最初のAIS送信機の位置が判り、この位置を衛星位置の大ざっぱな推定値として使用できる。(上記ステップE16、E18およびE20を続けることにより)発見された第1送信機の近くにある船舶からのデジタルデータ内のメッセージを探す試みを行う。(異なる送信機からの)少なくとも4つのAISメッセージが一旦検出されると、次の式の系を解くことにより、衛星位置を推定できる(ステップE12”)
【数1】
ここで、Ti,i=A,...,Dは、衛星の時間系(衛星のクロック)内の送信機iか
メッセージの送信時間であり、δSAT-UTC(t)は、衛星の時間基準と基準UTCの項との間のバイアスである。AISフレームは、UTC時間に同期化されているので、
されているので、位置i=A,....,Dは、既知である。衛星のクロックが4つの測定値に対して安定しており、従ってUTC時間に対する安定したバイアスを示すこと、および一般に100m未満の誤差を有する時間Ti、i=A,....,Dに対して衛星位置が同じであると仮定できる。Tm=1/4(TA+TB+TC+TD)と設定すると、次の式が得られる。
【数2】
【0061】
考慮することにより、より高い精度に位置を決定できる。最小二乗方法を使用するか、または衛星軌道の数学的モデルに基づくカルマンフィルタを使用することが望ましい。
【0062】
このように、衛星位置を見つけた後に、衛星が受信したメッセージ、従ってデジタルデータに含まれるメッセージを送信できたAIS送信機を、より高い精度で識別できる。既に処理したデータ内のメッセージをサーチし、次にデジタルデータ内のメッセージをサーチし続けることができる。
【0063】
図3の例に示されるようにデータベースを更新する。
【符号の説明】
【0064】
10 船舶
12 AISトランシーバ
14 LEO衛星
16 地上局
18 コントロールセンター
20 GNSS衛星
22 LEO衛星の軌跡
24 無線ナビゲーション信号
26 データベース
28 船舶の新しい位置
30 船舶の最終位置
32 閉じた陸上エリア
34 フットプリント
36 vsatを示す矢印
38 等ドップラーライン
40 周波数のセルに対応するハッチングのつけられたバンド
42 ローカルゾーン
E10 データを補足するステップ
E12 衛星の軌跡を決定するステップ
E12’ 衛星位置を最初に推定するステップ
E12” 衛星位置を推定するステップ
E14 AIS送信機を識別するステップ
E16 フラグメント状疑似メッセージを合成するステップ
E18 デジタルデータ内の候補メッセージをサーチするステップ
E20 発見されたメッセージの未知の部分をデコードするステップ
E22 データベースを更新するステップ
E24 AIS送信機のマップをディスプレイするステップ
R 半径
【技術分野】
【0001】
本発明は、船舶およびブイのための衛星監視システムに関する。
【背景技術】
【0002】
自動識別システム(AIS)とは、20〜30海里(37〜56km)の距離内で船舶と沿岸局とナビゲーションサポートシステムとの間でショートメッセージを交換するためのシステムのことである。AISは、VHFの船舶モバイルバンドにおいて自己組織型時間分割マルチアクセス(SOTDMA)を使用している。(162.975MHzを中心とする)AIS 1チャンネルまたは(162.025MHzを中心とする)AIS 2チャンネルで通信が行われ、各チャンネルは、25kHzの幅を有し、交換されるメッセージは、所定の長さを有し、船舶の識別(ID)、船舶の位置、船舶の航路および船舶の速度のようなデータを含む。
【0003】
各通信チャンネルは、60秒の長さのフレーム内で時間分割されており、各フレームは、2250個のスロットに分割されており、通常の運用では1つのAISメッセージ(またはレポート)が各スロットを占有できるようになっている。通常のモードでは、各船舶は2つの通信チャンネルで自己のAISメッセージを交互に送信する。所定の船舶からのAISメッセージの頻度は、その船舶の速度に応じて決まる。その船舶が航行中であれば、2〜10秒ごとに1つのメッセージが送信され、船舶の速度が速くなればなるほど、連続する2つのメッセージの間のスペースは短くなる。船舶が停止している場合には、3分ごとにメッセージが送信される。このシステムに参加している異なるプラットフォームからのメッセージの間のインターバルは、例えばITU−R M.2084レポート「自動識別システムメッセージの衛星検出」に記載されている。
【0004】
船舶および沿岸局のAIS受信機は、近くにあるすべての船舶からのメッセージを受信し、これら船舶がローカル環境の詳細マップを作成できるようにしている。
【0005】
このAISは、船舶の時間分割アクセスを管理する中央TDMAコントローラがなくても運用される。各AISトランスポンダは、通信チャンネルをモニタし、各メッセージ内で次のメッセージを送信するために使用されるスロットを留保している。ローカルの地理的ゾーンでは、衝突解決プロトコルが同一スロットにおけるメッセージの衝突を防止している。
【0006】
実情は、AISメッセージを衛星で検出することではない。実際には低軌道を回る衛星のアンテナのフットプリントが、共にコーディネートされていない複数のローカルの地理的ゾーンを一般にカバーしている。従って、その衛星は同じスロットにおけるメッセージのランダムな衝突を観察するので、その結果、衝突するメッセージの1つ以上が失われることがあり得る。所定のAISメッセージの正しい検出がデコードされる確率は、衝突の数のレートが増加するにつれて低下する。この件に関するより詳細な情報は、ITU−R M.2084レポートに記載されている。本明細書も、衛星のキャパシティを改善するための可能な方法を示唆するものである。
〇衛星の動きの結果生じるドップラーシフトは、フットプリント内の送信機の位置に応じて決まるので、このドップラーシフトに基づき、複数のメッセージを弁別することができる。衛星の動きによって生じるドップラーシフトは、±4kHzに達し得る。それにもかかわらず、このアプローチではAISの規格は、船舶のTDMA送信機に対し、キャリア周波数に対して±500Hzの誤差を許容していることを念頭に入れておかなければならない。
〇所定の船舶によって送信される連続する2つのAISメッセージの間には情報の重要な冗長性がある。ITU−R M.2084レポートは、地上をベースとする局で特殊な処理をすることを見込んで、特に衛星が1回の通過する時間長さに対応する時間スロットにおいて、先に受信された信号のスキャンされたコピーと着信中のAIS信号とを連続的に相関化するために、2つのAISチャンネルで受信されたデータをリアルタイムでダウンロードすることにより、連続送信することを示唆している。
【0007】
米国特許第7,876,865号は、スペース内のAISメッセージを検出し、これらメッセージをデコードするためのシステムおよび方法を記載している。AIS信号はデジタル化されており、異なるドップラーシフトに対するAISメッセージのコードシーケンスに対応する所定信号とデジタルデータとを相関化することにより、AIS候補メッセージを識別している。相関化に使用されるメッセージコードシーケンスは、すべてのAISメッセージ、すなわち24ビットのトレーニングシーケンスおよび8ビットのスタートフラグに共通するメッセージのスタートに対応している。AIS候補メッセージの検出を改善するために、相関化に使用されるメッセージコードシーケンスは、既知メッセージの一部、例えば船舶識別子(この場合、MMSI番号10)の一部によって拡張できる。従って、米国特許第7,876,865号は、直前に検出された送信機からのメッセージを再検出しようと試みるステップに述べているITU−R M.2084レポートからのアイデアについて記載している。このアプローチは、同じ船舶からの連続する2つのメッセージのうちのかなり多数のビットが同じとなっているという事実を活用するものである。
【0008】
AISの詳細については勧告書IUT−R M.1371−4(04/2010)およびその付属書に記載されている。
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明の目的は、AIS送信機の地域マップまたは世界マップを作成するために、衛星によるAISメッセージの検出を改善することにある。
【課題を解決するための手段】
【0010】
本発明によれば、AISメッセージを検出するための方法は、少なくとも1つのAISチャンネルにて衛星によって受信された信号を示すデジタルデータを提供するステップと、デジタルデータとフラグメント状疑似メッセージとを相関化することにより、デジタルデータ内の候補メッセージを識別するステップとを含む。フラグメント状疑似メッセージは、送信時間および/または送信機の位置に依存すると共にAIS送信機のデータベースの支援により決定される少なくとも1つのAISメッセージフラグメントを含む。
【0011】
従って、本発明に係わる方法は、AIS送信機上の情報を含むデータベースに基づくものである。第1の場所において、この情報は衛星のオーバーパス(上空通過)中(すなわち当該デジタルデータに変換された信号の受信時)の衛星のフットプリント内に、どのAIS送信機を発見すべきかを決定するのに使用される。すべてのAISメッセージに共通するメッセージフラグメント(特にスタートフラグに続く可能性のあるトレーニングシーケンス)とデジタルデータとを相関化することにより、デジタルデータ内のAISメッセージをサーチする代わりに、本発明は、信号受信時に衛星によってカバーされているゾーン内において発見すべき(またはデータがリアルタイムで評価されない場合には、発見された)既知の特定の送信機からのAISメッセージをデータバンクからデジタルデータ内でサーチすることを提案するものである。従って、フラグメント状疑似メッセージは、データベースの助けにより、かつ衛星の軌跡から(例えば、時間を関数とする衛星の位置から)予想可能なメッセージフラグメントから成る。例えば各AISメッセージは送信機を不明確でないように定義するフィールド「ユーザーID」(通常は船舶のMMSI番号)を含む。トレーニングシーケンスとスタートシーケンスとデジタルデータと相関化するためのフィールド「ユーザーID」を含むフラグメント化されたメッセージを使用することにより、特定のAIS送信機から発信されたAISメッセージを明瞭にサーチできる。ノイズに対する相関化ピークの高さは、フラグメント化されたメッセージのサイズ(ビット数)が大きくなるにつれ高くなることが理解できよう。本発明によれば、候補メッセージのアクティーブ部分も予想する。ここで、「アクティーブ」部分またはフィールドなる用語は、例えば位置、ナビゲーションなどに関する情報がメッセージごとに変わる可能性が高いAISメッセージ部分を意味するものと理解する。これまで示したように、フラグメント状疑似メッセージのアクティーブ部分は、送信時間、(例えば、「タイムスタンプ」、「UTC年」、「UTC月」、「UTC日」、「UTC時」、「UTC分」および/または「UTC秒」フィールドからのビット)および/または送信機の位置(例えば、フィールド「経度」および/または「緯度」からのビット)に依存するAISメッセージの少なくとも1つのフラグメントを含む。種々のAISメッセージフィールドについては、勧告書ITU−RM.1371−4(04/2010)およびその付属書に記載されている。
【0012】
本発明の方法の好ましい実施形態によれば、フラグメント状疑似メッセージは、送信機の位置に依存する少なくとも1つのAISメッセージフラグメントを含む。このメッセージフラグメントを合成することは、
〇前記信号の受信時に衛星によるサービスを受けるゾーン内に位置するAIS送信機を、AIS送信機のデータベースに基づいて識別するステップと、
〇前記識別された送信機の、前記データベースに記憶されていた位置に基づき、送信機の位置に応じた少なくとも1つのAISメッセージフラグメントを決定するステップとを含む。
【0013】
送信機の位置に応じて決まる少なくとも1つのAISメッセージフラグメントは、「経度」フィールドからの最大位ビットおよび/または「緯度」フィールドからの最大位ビットを含む。ここで、同一船舶の連続する2回の観察の間で、船舶の位置は少なくともほぼ同じであると仮定する。船舶の新しい位置は、その船舶の最後の既知の位置を中心とする円内に予想でき、この新しい位置は、船舶の最高速度および最終メッセージから経過した時間に対応する。その他のパラメータ、例えば船舶の目的地、その船舶の最終船首方位、その船舶の最終速度、その船舶の最終ナビゲーションステータスなどが既知である場合(例えばデータバンク内に記憶されている場合)、予想は更に正確になり得る。ある送信機が2〜10秒ごとにその送信機のAISメッセージを送信すると仮定した場合、衛星の同じオーバーパス中に受信されるAISメッセージに対する位置の推定値は、極めて正確となる。衛星が2回オーバーパスする間のある時間(例えば1〜2時間)の間、送信機が観測されないことがあり得る。推定される位置がより正確になればなるほど、フィールド「経度」および「緯度」のより多くの最大位ビットが既知となる。
【0014】
デジタルデータには(例えば衛星により)タイムスタンプを押すことが好ましい。こうして、デジタルデータのタイムスタンプに基づき、送信時間に依存する少なくとも1つのAISメッセージフラグメントを決定できる。送信時間に依存する少なくとも1つのAISメッセージフラグメントは、特に「タイムスタンプ」フィールドからのビット、すなわち「UTC年」、「UTC月」、「UTC日」、「UTC時」、「UTC分」および/または「UTC秒」フィールドからのビットを含む。
【0015】
フラグメント状疑似メッセージは、データベース内で識別された送信機固有の1つ以上のスタティックフィールドからのビットを含むことが好ましい。ここで、「スタティック」フィールドなる用語は所定のAIS送信機に対してメッセージごとにコンテントが変化しないフィールドを意味するものと理解されよう。スタティックフィールドの例として、「ユーザーID」フィールド(MMSI数を含む)、「AISバージョンインジケータ」フィールド、「IMO番号」フィールド(国際船舶協会番号)、「コールサイン」フィールド、「ネーム」フィールド(船名)、「船舶のタイプおよび積荷のタイプ」フィールド、「位置に対する全寸法/基準」フィールド、「電子位置固定デバイスのタイプ」フィールドからのビットがある。
【0016】
送信時間または送信機の位置に依存するフラグメントとは別に、フラグメント状疑似メッセージとして、データベース内で識別された送信機に固有の1つ以上のアクティーブフィールド、例えば「RAIMフラグ」フィールド(送信機自律完全調節)、「特殊操縦インジケータ」フィールド、「推定到着時間」フィールド、「現在の喫水」フィールド、「目的地」フィールド、「ナビゲーションステータス」フィールド、「地上のコース」フィールド、「地上の速度」フィールドおよび/または「通信ステータス」フィールドからのビットがある。
【0017】
デジタルデータ内の候補メッセージが一旦識別された場合、前記候補メッセージをデコードし、デコードされたメッセージ内に含まれる情報を使ってAIS送信機の前記データベースを更新することが好ましい。
【0018】
デジタルデータと複数のフラグメント状疑似メッセージとを相関化することにより、候補メッセージを識別することが好ましい。実際に、特にメッセージ固有の信号が極めて微弱であるか、ノイズが多い場合には、候補メッセージを識別するためにはいくつかの想定を検討しなければならないことがある。その理由の1つは、候補メッセージの予想可能なフラグメントがギャップによって分離される得ることにある。基本的には、AIS規格はフィールドの固定された公称長さを定義しているので、ギャップの長さは既知である。しかしながら、スタートフラグまたはエンドフラグと同じビットシーケンスの発生を防止するために、スタッフィングビットを挿入しなければならない場合、フィールド長さが、変わり得る。アプリオリに未知のように、ギャップ(候補メッセージの一部分)がスタッフィングビットを含む場合、候補メッセージ内にスタッフィングビットが存在するか否かを検査するように、複数のフラグメント状疑似メッセージを設計でき、異なるフラグメント状疑似メッセージに対応する相関性をシリアルにおよび/またはパラレルに計算できる。
【0019】
信号受信時の衛星の位置は種々の方法で得ることができる。例えば、衛星には測位システム(GPS、ドリス、ガリレオ、グロナス、コンパスまたはその他)を装備させることができ、こうして衛星はデジタルデータを衛星の軌跡データにリンクできる。別の可能な方法として、衛星コントロールセンター(TT&Cセンター:テレメートリー、トラッキングおよびコマンド)または例えばレーザー処理測定システムを使用する監視ネットワークにより、衛星の軌跡データを得る方法がある。更に別の可能な方法として、デジタルデータ内の1つ以上のAISメッセージを識別する送信機に対する三角測量(距離を測定することにより)により、信号受信時の衛星の位置を推定する方法がある。従って、受信したAISメッセージに基づき、衛星の軌跡を再構成できる。
【0020】
デジタルデータとフラグメント状疑似メッセージとを相関化するためには、フラグメント状疑似メッセージのスタート点とAIS時間フレームの時間インターバルのスタート点とを同期化することが好ましい。デジタルデータにはタイムスタンプが押されており、AISフレームは、UTC時間と同期化されているので、時間的な不確実性の範囲は、AISの同期化ジッター(±3ビットに対応する±312μs)に船舶の位置の不確実性を補償するための所定のバッファを加えた値に低減される。全体として見れば、時間的な不確実性の範囲は、UTC時間に対して±6ビットとなると想定できる。
【0021】
デジタルデータとフラグメント状疑似メッセージとを相関化するために、フラグメント状疑似メッセージに対する計算されたドップラーシフトを送信機の位置の関数として補償することが好ましい。1つのAISメッセージのドップラーシフトは、衛星とメッセージ送信機との間の相対的速度に応じて決まる。地上基準フレームでは、AIS送信機の速度を無視できるので、ドップラーシフトを衛星の基準フレーム内の送信機の位置の関数として表記できる。低軌道衛星の場合、ドップラーシフトは、±4.5kHzのインターバル内に含まれることになる。送信機の位置は、少なくとも最小100km(最後に検出された位置を中心とする約100kmの半径)であると判っており、衛星の軌跡も既知であると仮定した場合、ドップラーシフトの不確実性は、500Hz未満となる。しかしながら衛星の高さが低い(ターゲット方向と水平線の間の角度が小さい)場合、ドップラーシフトの不確実性は、通常±100Hzのオーダーとなる。
【0022】
しかしながらAIS規格は、±500Hzの送信機のキャリア周波数に対する誤差を許容しているので、周波数レンジ内の全不確実性は、±1000Hz(ドップラーシフトの不確実性+キャリア周波数に対する誤差)となる。所定のAIS送信機では、キャリア周波数に対する誤差は、通常時間に対して基本的には一定である。従ってこの誤差は、周波数レンジ内でのサーチを考慮できるようにデータベース内に記憶することが好ましい。従って、データベースからキャリア周波数に対する誤差を抽出できるAIS送信機の場合、周波数レンジ内の不確実性はドップラーシフト(±100Hz)の不確実性だけとなる。データベース内に所定のAIS送信機のキャリア周波数に対する誤差がセーブされていない場合、相関性ピークを検出した周波数から、および(衛星並びに送信機の位置を使って得た)理論的ドップラーシフトからおよび将来使用するためにこの誤差をデータベース内に記憶することにより、この誤差を計算できる。
【0023】
最後に、フラグメント状疑似メッセージとデジタルデータとを相関化するために、データベース内に記憶されているAIS送信機の変調指数も同じように考慮することが好ましい。特定のAIS送信機のメッセージをサーチするには、その変調指数(AISに対する公称値:0.5)を知ることが望ましい。従って、この変調指数がアプリオリに未知である場合、変調指数(例えば0.5±0、1のレンジにある)のための複数の想定をするための相関化を行うことができ、相関性を最大にする変調指数の値はデータベース内に記憶される。
【0024】
本発明の更なる特徴は、コンピュータによる実行時にコンピュータに上記方法を実行させるコンピュータで実行可能な命令を含むコンピュータプログラムにも関する。本発明の更に別の特徴は、プログラム命令を含むデータ記憶メディア(例えばランダムアクセスメモリまたはリードオンリーメモリ、CD−ROM、USBキー、ハードディスクなど)を含むコンピュータプログラム製品にも関する。
説明のために添付図面を参照して、以下に示す好ましい実施形態の詳細な説明から、本発明の上記以外の特性および特徴が明らかとなろう。
【図面の簡単な説明】
【0025】
【図1】AISメッセージのための衛星検出システムの全体のアウトライン図である。
【図2】AISメッセージの構造の図である。
【図3】本発明の第1実施形態に係わるAISメッセージの検出方法の原理を示す略図である。
【図4】AISメッセージを検出するためのフラグメント状疑似メッセージの図である。
【図5】船舶の新しい位置を予測するための原理の図である。
【図6】フラグメント状疑似メッセージのうちのメッセージフラグメント(既知のビット)およびギャップ(アプリオリに未知のビット)の図である。
【図7】LEO衛星のフェーズドアレイアンテナのフットプリントの略図である。
【図8】本発明の第2実施形態に係わるAISメッセージの検出方法の原理を示す略図である。
【発明を実施するための形態】
【0026】
図1は、AISメッセージのための衛星検出システムの全体のアウトラインを示す。各々にAISトランシーバ12が装備されている複数の船舶10は、船舶の識別符号(MMSI番号)、WGS84座標における局所限定化(世界ジェオデティックシステム、1984年改訂)、船首方位、速度およびその他のステータス情報のようなデータを含むAISメッセージを送信し、近くにある船舶および沿岸局のAIS受信機によりこれらメッセージが受信される。こうして各船舶10は、(約20〜30海里の半径内の自己の)ローカル環境におけるAIS送信機の詳細マップを作成でき、このマップはレーダーおよびその他のナビゲーション援助装置が供給する情報を補足する。
【0027】
これらAISメッセージは、低地球軌道内、すなわち160〜2000kmの間の高度に存在し得る(LEO)衛星14によっても受信できる。1つの低軌道衛星のアンテナのフットプリントは、AISがメッセージの衝突を防止するセルの大きさを大幅に超えるような広さとなっている地理的ゾーンを一般にカバーする。これらセルは一般に、セル間ではコーディネートされていないので、衛星が受信するAIS信号は時間および周波数がオーバーラップするメッセージを含み得る。特に船舶密度が高いゾーンで問題が生じる。
【0028】
(162.975MHzを中心とする)AISチャンネル1または(162.025MHzを中心とする)AISチャンネル2(以下、これらチャンネルをAIS信号と称す)が衛星14によって受信され、デジタル化される。このように得られたデジタル信号にはタイムスタンプが押され、この信号は、ダウンリンクを通して1つ以上の地上局16へ送信される。船舶監視システムは、複数のLEO衛星と複数の地上局とを含むことができることに留意すべきである。これらLEO衛星は、1つ以上の衛星コントロールセンター18によって制御されるが、明確にするために、以下、1つのLEO衛星について述べる。複数の衛星を使用する場合、複数の衛星によるデータ処理をパラレルに実行することが好ましい。
【0029】
このLEO衛星14には、地球測位システム、例えばGPS受信機を装備することが好ましい。こうすると、衛星はGNSS衛星20から発信された無線ナビゲーション信号24によりその位置を決定できる。次に、AIS信号を示すデジタルデータを、LEO衛星の軌跡22に、全単射的にリンクできる。各データシーケンスが、LEO衛星の1つのインスタンスおよび1つの位置に明白に属すようにすることができる。
【0030】
図2は、AISメッセージの構造の図である。各AISメッセージは256ビットを含み、ランプアップフィールド(8ビット)と、トレーニングシーケンス(24ビット)と、メッセージスタートフラグ(8ビット)と、データシーケンス(168ビット)と、周期的冗長性チェック(16ビット)と、メッセージエンドフラグ(8ビット)と、バッファ(24ビット)とにサブ分割されている。勧告書ITU−R M.1371.4は、スタートバッファだけでなくエンドバッファについても述べている。本明細書では、これら2つのフィールドを1つのフィールドとして扱う。
【0031】
AISメッセージのデータシーケンスも所定の長さのいくつかのフィールドにサブ分割されている。データシーケンスおよび送信されるフィールドの構造は、メッセージのタイプに応じて決まる。各AISメッセージは、すべてのAISメッセージに共通するビットシーケンス、例えばランプアップフィールドと、トレーニングシーケンスと、スタートフラグと、エンドフラグとを含むことに留意すべきである。あるタイプのAISメッセージしか検討しない場合、フィールド「IDメッセージ」も既知である。その他のビットシーケンスは送信機に固有のものである。これらのうちで、送信機において、不定期間の間でプログラムされる送信機固有の「スタティック」なビットシーケンスとメッセージごとに変わり得る送信機固有の「ダイナミック」なビットシーケンスとを区別することもできる。
次の表は、送信機固有の「スタティック」なビットシーケンスを示す。
【表1】
【0032】
図3は、第1の好ましい実施形態に係わる本発明の方法のための原理の略図を示す。本発明は、メッセージを送信したAIS送信機が既知であり、かつ更にその送信機に関する補足情報、特にその位置が入手できる場合のAISメッセージのデータシーケンスの所定のビット数を予測できるということを活用するものである。この予測可能なビットは送信機固有の「スタティック」なフィールドのビットを特に含む。その理由は、AIS送信機のデータベース内にこれらフィールドのコンテントをセーブするだけでよいからである。その他の予測可能なビットは、送信機固有の「ダイナミック」フィールドの所定のビットである。例えばフィールド「経度」および「緯度」の最大位ビットを含むが、視界から送信機が消えることがないよう十分高い頻度で当該送信機の位置が発見されることが条件となる。
【0033】
上記のように、LEO衛星のレベルでデータを補足する(ステップE10)。タイムスタンプが押されたデジタルデータを衛星14へのダイレクトリンクにより地上局16内に位置し得るデータセンターへ送信するか、または地上局16と通信状態にある別のロケーションへ送信する。
【0034】
AISメッセージを検出するために、LEO衛星から(直接または間接的に)発信されたデジタルデータと通常トレーニングシーケンスとを相関化する。このシーケンスはかなり短いのでノイズの多い信号が存在している場合、相関化ピーク、従って候補メッセージを検出することはできない。デジタルデータ内でまだ検出されていないAISメッセージのうちのより多くの数のビットを予想するためには、オーバーパスの時間に衛星によってカバーされているゾーン内でAISメッセージを送信できたAIS送信機を識別する。
【0035】
これを行うには、まず最初に衛星の軌跡を決定しなければならない(ステップE12)。例えば測位システムを助けにして衛星のレベルで軌跡(時間を関数とする位置)を計算することが好ましい。この場合、AIS信号データと同じ通信リンクを通して衛星の軌跡に関するデータをデータセンターへ送信することができる。これとは異なり、データセンターが任意の通信リンクを通して衛星制御センター18(TT&Cセンター)からのLEO軌跡データを受信することができる。
【0036】
デジタルデータ内に含まれるAISメッセージを送信することができたAIS送信機を識別するために(ステップE14)、AIS信号の受信時に衛星の位置を決定する。次に、データベース26にセーブされている最終位置は、衛星位置のまわりの所定ゾーン内にあるAIS送信機を示すAIS送信機26のデータベースにコンサルトする。この所定のゾーンは、衛星のアンテナ(単数または複数)のフットプリントおよび可能な場合には周辺ゾーンも含むことができる。この周辺ゾーンは、データベースにセーブされた最終位置がフットプリントの外部にあり、かつ船舶位置が検出されてから経過した時間内に進入できる程度にフットプリントに十分近い船舶を考慮する。
【0037】
デジタルデータ内に含まれるAISメッセージを送信できた各AIS送信機に対し、データベース26に含まれる情報に基づき予測できるビットを含む、1つまたは複数のフラグメント状疑似メッセージを合成する(ステップE16)。次に、デジタルデータ内の候補メッセージとフラグメント状疑似メッセージとを相関化することにより、その候補メッセージのサーチを実行する(ステップE18)。以下、これらステップについてより詳細に説明する。
【0038】
デジタルデータ内の候補メッセージが一旦識別されると、その未知部分(すなわち、十分な確度で予想できないビットシーケンス)をデコードする(ステップE20)。この未知の部分は、既知の技術、例えばビタルビアルゴリズムの助けによってもデコードしてもよい。次に、デコードされたメッセージ内に含まれる情報を用いてデータベース26を更新する(ステップE22)。
【0039】
次のデジタルデータまでこの方法を続ける。衛星の位置が変化するにつれ、衛星フットプリントに進入したり、このフットプリントから離れる新しいAIS送信機を識別する。
【0040】
デジタルデータへの加入者は、このデジタルデータにアクセスすることができ、特にAIS送信機のマップのディスプレイを得ることができる。(ステップE24)。
【0041】
AIS送信機が衛星のフットプリントから離間するとき、AIS送信機は、AISメッセージの衛星検出システムの同じ衛星または別の衛星の次のオーバーパスまで、観察されない状態のままとなる。4台のLEO衛星が配置されたコンステレーションでは、ローカルの無観察時間は、2時間の長さとなり得る。このことは、衛星のフットプリントに進入する送信機に対してセーブされるデータが、平均2時間古いことを意味する。フラグメント状疑似メッセージを合成する際には、この時間を考慮することが好ましい。デジタルデータ内の候補メッセージを識別するには複数の仮想が必要となり得る。これら想定は、パラレルにおよび/またはシリアルに検討してよい。シリアルに検討することを選択するときには、最も可能性の高い確率の想定でスタートしなければならず、検出に失敗した場合には、確率の降順で次の想定を続けなければならない。
【0042】
例えば送信機が移動しているとデータベースにセーブされている最終ナビゲーション状態が示しているような所定のAIS送信機に対しては、タイプ1のAISメッセージを検出しようとすることが好ましい。この場合、デジタルデータと相関化するためのフラグメント状疑似メッセージを正しく構成する。失敗した場合(例えば相関性ピークが検出されない場合)、時間および周波数の同じ想定を有する同じ送信機からのタイプ3のAISメッセージの検出を試みることができる。データベース内にセーブされている最終ナビゲーション状態が移動していないことを示すAIS送信機を探すときには、最初にタイプ3のAISメッセージを検出しようとする。失敗した場合、時間および周波数の同じ想定を有する同じ送信機からのタイプ1のAISメッセージを検出することを試みることができる。カバーされている地理的ゾーン内に存在すると考えられるすべての送信機から、タイプ5のメッセージをパラレルに検出しようと試みることが好ましい。
【0043】
次の表は、タイプ1、2または3のAISメッセージに対する予測可能なビットを示す。一般的に、予測可能なビット数は予想に使用されるモデルの複雑さ、および予想時のデータベースの鮮度に応じて決まる。一般に送信機固有のスタティックフィールドのビットはすべて予想可能である。これと対照的に、メッセージごとに変化し得る送信機固有のダイナミックフィールドに対しては、データベースの鮮度は、これらフィールドのうちのどれだけ多くのビットを予想できるかを決定する。
【表2−1】
【表2−2】
【0044】
図4は、AIS送信機が通信ステートSOTDMAとなっている固定された(アンカー係留されているかまたはつながれている)船舶からのタイプ1のAISメッセージを検出するためのフラグメント状疑似メッセージの図である。予想可能なビットシーケンス(メッセージフラグメント)はハッチングされている。これら予想可能なビットシーケンスはいくつかのフィールドにわたって拡張できる。所定のフィールド、例えば経度および緯度のフィールドに対しては、ビットの一部を十分な確度で予想できる。
【0045】
次の表は、(固定された基地局から送信された)タイプ4のAISメッセージに対する予想ビットを示す。
【表3】
【0046】
次の表は、(AISフレーム内の連続する2つのスロットにわたって拡張された)タイプ5のAISメッセージに対する予想可能なビットを示す。
【表4】
【0047】
次の表は、タイプ21のAISメッセージに対する予想可能なビットを示す(ナビゲーション支援局によって送信され:AISフレーム内の連続する2つのスロットにわたって延びている)ことを示す。
【表5】
【0048】
従って、AIS送信機が既知の場合、各AISメッセージは予想可能なビットのシーケンスで開始する。フラグメント状疑似メッセージの第1フラグを示すこのビットシーケンスは、特に「トレーニングシーケンス」、「スタートフラグ」、「IDメッセージ」、「リピートインジケータ」および「IDユーザー」の各フィールド、すなわち少なくとも70ビットを含む。識別すべきメッセージのタイプによっては、この第1メッセージフラグメントは大幅に大きくなり得る(タイプ4のメッセージの場合は110ビット、タイプ5のメッセージに対しては306ビット)。
【0049】
上記表では、可能なスタッフィングビットは考慮していない。各AISメッセージでは、エンドメッセージフラグと同じビットシーケンス(すなわちビットシーケンス[01111110])が発生することを防止するためにデータシーケンスおよびフレームチェックシーケンス内にスタッフィングビットが自動的に挿入される。AIS送信機の側では、このことは出力ビットストリーム内に連続する5つの1が発見された場合、これらの1が5つ連続した後にゼロを挿入することを意味する。受信側では1が5つ連続した後の最初のゼロを除去しなければならない。これらスタッフィングビットは、検出すべきメッセージの既知の部分だけでなく、未知の部分も長くし得る。従って、異なる可能なケースを考慮するためにデジタルデータと相関化されたフラグメント状疑似メッセージ内で、ギャップ(未知の部分)の長さを変えなければならない。
【0050】
フラグメント状疑似メッセージは、AIS送信機の送信時間(例えばタイプ1、2、3または21のメッセージのフィールド「タイムスタンプ」)および/または位置(例えばタイプ1、2、3、4および21のメッセージのフィールド「経度」および「緯度」)に応じて決まる少なくとも1つのメッセージフラグメントを含む。送信機の位置に応じて決まるメッセージフラグメントのビットを推定(予想)するには、当該AIS送信機の(データベースにセーブされている)既知の最終位置を考慮しなければならない。いくつかのシナリオが可能である。特定の送信機からの最後にデコードされたAISメッセージと同じ送信機からの識別すべきAISメッセージとの間で、ナビゲーションステートが変化しないと想定することが好ましい。このような想定は、すべてのケースで必ずしも真であるわけではないが、当該観察されていない時間の間(長くて数時間の間)では、この想定は極めてあり得ることである。従って、船舶がアンカー係留されているか、つながれていることをデータベースが表示した場合、船舶の位置は(10メートル内の)同じ位置に留まるとの想定に基づき、フラグメント状疑似メッセージを合成する。相関ピークを検出できなければ、船舶が航行中であると仮定する。船舶が航行中であることを最後のナビゲーションステートが表示した場合、まず最初にこの想定を検討しなければならない。図5に示されるようなこのようなケースでは、最後の既知の位置30のまわりの円の内側に、船舶28の新しいアプリオリに未知の位置を見つけなければならない。ここで、円の半径Rは、最後にデコードされたAISメッセージからの時間ΔTと船舶の最大速度vmaxとの積である。すなわちR=ΔT×vmaxである。船舶の最大速度(この値がデータベースに記憶されている場合)をデータベース内で見つけることができる。最大速度が未知である場合、その速度は所定のスレッショルド値(例えば50km/h)よりも低いと想定することができる。円の内部にある陸地32の面積は無視できる。(しかしながら当該船舶が河川のボートである場合、明らかにナビゲート可能な水路を排除してはならない。)R=100kmの場合の新しい位置の精度では9ビット、フィールド「経度」およびフィールド「緯度」では8ビットを予想できる。データベースで船舶に関する別の情報を入手できる場合、特にタイプ5のメッセージのフィールド「船舶のタイプおよび積み荷のタイプ」、「推定到着時間」および「目的地」が入手できる場合、予想精度を改善できる。例えば、当該船舶が過去のルートの知られているフェリーであると判っている場合、その船舶は恐らくこれらルートのうちの1つにあり、位置の不確実性ゾーンは、かなり低下する。到着推定時間および到着港が判っている場合、このことは、この船舶がとるルートに関する予想も可能にする。
【0051】
次にデジタルデータ内の候補メッセージに対するサーチステップの好ましい実行(ステップE18)について、より詳細に説明する。これらデジタルデータは、予想ビットのセグメント(メッセージフラグメント)と一義的に相関化されることに留意すべきである。未知のビット(異なるメッセージフラグメント間のギャップ)とAIS信号のデジタルデータとは相関化されない。デジタルデータとUTC時間との同期化およびAIS送信機の位置の最小近似知識により、各メッセージからのAISメッセージの伝搬遅延時間を計算できる。各AIS送信機がそのメッセージをUTC時間に(直接または間接的に)同期化する際、伝搬遅延時間を考慮することにより、±6ビット(時間的な不確実性レンジ)の精度で所定の送信機からAISメッセージを開始できるインスタンスを知る。この時間的不確実性のレンジは、船舶の位置の不確実性を補償するためにAISの同期化ジッター(±3ビットに対応する±312μs)+所定のバッファから構成される。相関化のために時間サーチレンジは、時間的不確実性レンジ(例えば12ビット)に対応する。AISフレームの各タイムスロットのスタート時に相関化が実行される。
【0052】
送信機のキャリア周波数に対するドップラー効果および誤差を検討するために、キャリア周波数のまわりのサーチ周波数レンジにわたって相関化方法を実行する。データベース内にキャリア周波数に対する誤差が含まれているような送信機からのAISメッセージを探した場合、この誤差を補償することができ、周波数の残留ドメイン内における不確実性は、ドップラーシフトの不確実性(通常±100Hz)だけとなる。従って、周波数サーチインターバルは、一般に200Hzの幅となる。
【0053】
ハーフビットの各積分の間でのデジタルデータとフラグメント状疑似メッセージとの間の遅延時間を変えることにより、各相関化演算は、24回の積分を含む。周波数サーチインターバルを(25Hz幅の)8つのセルに分割することにより、(以下の変調指数のための異なる想定を含めない)時間/周波数サーチスペース内のセルごとに、総計192回の積分が行われる。周波数軸上の不明確性を生じることなく、主たる相関化ピークを検出できるように、周波数におけるセルの幅を選択することが望ましいことに留意すべきである。
【0054】
キャリア周波数に対するシフトが一旦判ると、理論的なドップラーシフト量を減算でき、残留誤差を使ってデータベース内にセーブされているキャリア周波数に対する誤差を補正できる。
【0055】
時間/周波数サーチスペースの各セルに対する変調指数の仮想のための相関化方法は、次のステップを含むことが好ましい。
ステップa.2つの可能な位相(NRZIコーディングされたデータ)を使用することにより、デジタルデータと(K1の既知のビット(図6参照)を有する)第1メッセージフラグメントとを相関化するステップ。ステップaから2つの相関化の結果が得られる。
ステップb.デジタルデータと(K2の既知のビットを有する)第2メッセージフラグメントを相関化するステップ。第1ギャップ(第1フラグメントと第2フラグメントとの間の未知のビット)内の可能なスタッフィングビットを考慮するためには、第1フラグメントから異なる距離に相関化のスタート点を位置させなければならない。第1ギャップの未知のビットの数は、既知である(L1)。従って、第1ギャップの長さは、L1+スタッフィングビットの数となる。後者の数は未知であるので、異なる可能なギャップ長さを試みなければならない(L1、L1+1、....、L1+B1、ここでB1はL1ビットのシーケンス内のスタッフィングビットの最大数である)。NRZIコーディングを考慮するために2つの可能な位相に対して各相関化を実行しなければならない。ステップbからは2×B1の相関化結果が得られる。
ステップc.デジタルデータと(K3の既知のビットを有する)第3メッセージフラグメントを相関化するステップ。第2ギャップ(第2フラグメントと第3フラグメントとの間の未知のビット)内の可能なスタッフィングビットを考慮するためには第2フラグメントから異なる距離に相関化のスタート点を位置させなければならない。第2ギャップの未知のビットの数は、既知である(L2)。従って、第2ギャップの長さはL2+スタッフィングビットの数となる。後者の数は未知であるので、異なる可能なギャップ長さを試みなければならない(L1、L1+1、....、L1+B2、ここでB2はL2ビットのシーケンス内のスタッフィングビットの最大数である)。NRZIコーディングを考慮するように2つの可能な位相に対する各相関化も実行しなければならない。ステップbからは2×B2の相関化結果が得られる。
ステップd.等々
ステップe.パラレルな処理技術を採用する場合、ステップa、b、cおよびdの可能な組み合わせに従い、異なる相関化の結果を加算しなければならない。従って、テストされる想定の数は、2×(2×B1)(2×B2)....となる。
ステップf.検討された想定のうちで、(フラグメントの組に対し)最大の相関化ピークを有する結果のサーチを行う。更に確実な検出をするには、相関化ピークが、経験的に強化された(ノイズに対する)分析的にあらかじめ定められた所定のスレッショルドを超えていなければならない。
【0056】
すべての想定(すべての可能な組み合わせ)を検討する代わりに、ステップa、b、cおよびdに対し、各メッセージフラグメントに対して最大の相関化ピークを発生した想定だけを維持してもよい。このオプションには、フラグメントの正しい組み合わせに到達することができないという、より高いリスクが存在する。この欠点を緩和するために、ステップa、b、cおよびdを通過する際に、最大の相関化ピークを有する限られた数の組み合わせを保持できる可能性があり、その他の組み合わせは廃棄する。
【0057】
LEO衛星は、各々がAIS信号を受信する一群の基本アンテナ(フェーズドアレイアンテナを構成する)を含むことが好ましい。次に、これらアンテナ群の意図する指向性が得られるように、異なるアンテナが受信した信号を変換することによって得られるデジタルデータを組み合わせることができる。この場合、アンテナ群によってカバーされる海抜におけるゾーンを人工的に縮小し、一度に検討すべきAIS送信機の数(および衝突メッセージの数)を減少できる。換言すれば、このゾーンの外の地理的ゾーンを縮小しながら、所定の地理ゾーンに対するアンテナの感度を高めることができる。次に、異なるデジタルデータフローの間の位相関係を変えることによって、アンテナの群のフットプリントをスイープできる。この周波数選択技術(狭周波数セル)によって、干渉する信号のパワーを大幅に低下させることが可能となっている。
【0058】
図7は、衛星のアンテナの群のフットプリント34を略図で示している。衛星は(矢印36が示す)速度vsatで移動し、これによって衛星が受信するAIS信号のドップラーシフトが生じる。参照番号38により等ドップラーラインが示されている。ハッチングのつけられたバンド40は、複数の周波数の1つのセルに対応している。フェーズドアレイアンテナにより、検出ゾーンをフットプリント34よりも実質的に狭いローカルゾーン42に縮小することが可能となっている。次に、データベース内に記録された最終位置の結果が、このローカルゾーン42に存在し得る船舶からのAISメッセージを検出する試みを行うことができる。ローカルゾーン42の内部では、ドップラーシフトの範囲はフットプリント34に対してかなり狭く、従って各ローカルゾーン42に対してテストすべき周波数セルの数は大幅に減少する。
【0059】
図8は、第2の好ましい実施形態に係わる本発明の方法に対する原理の略図を示す。この図の方法のステップと同一または類似のステップを示すのに、同じ参照番号が使用されている。前の例と同じように、LEO衛星の高さでデータを収集する(ステップE10)。コンピュータセンターにはタイムスタンプが押されたデジタルデータを送信する。図3の方法と異なる主な違いは、衛星の位置を送信機の位置までの距離を三角測量で得ている点にあり、送信機のAISメッセージはデジタルデータで識別される。LEO衛星に地球測位システムが装備されていない場合、このシステムが故障している場合、または制御センターにより衛星に関する軌道データが伝送されていない場合、本発明のこの変形例は重要である。
【0060】
この方法を開始するには、デジタルデータ内に含まれたAISメッセージを送信できたAIS送信機を識別する(ステップE14)。初期の可能性を低減できるようにするには、衛星位置の初期推定値を入手することが好ましい(ステップE12’)。衛星位置の初期推定値が入手できない場合、(相関化のためのAISメッセージすべてに共通するスタティック部分だけを使用することにより)従来の方法でデジタルデータ内の最初のAISメッセージを検出することを試みることができる。最初のAISメッセージが一旦デコードされると、受信された最初のAIS送信機の位置が判り、この位置を衛星位置の大ざっぱな推定値として使用できる。(上記ステップE16、E18およびE20を続けることにより)発見された第1送信機の近くにある船舶からのデジタルデータ内のメッセージを探す試みを行う。(異なる送信機からの)少なくとも4つのAISメッセージが一旦検出されると、次の式の系を解くことにより、衛星位置を推定できる(ステップE12”)
【数1】
ここで、Ti,i=A,...,Dは、衛星の時間系(衛星のクロック)内の送信機iか
メッセージの送信時間であり、δSAT-UTC(t)は、衛星の時間基準と基準UTCの項との間のバイアスである。AISフレームは、UTC時間に同期化されているので、
されているので、位置i=A,....,Dは、既知である。衛星のクロックが4つの測定値に対して安定しており、従ってUTC時間に対する安定したバイアスを示すこと、および一般に100m未満の誤差を有する時間Ti、i=A,....,Dに対して衛星位置が同じであると仮定できる。Tm=1/4(TA+TB+TC+TD)と設定すると、次の式が得られる。
【数2】
【0061】
考慮することにより、より高い精度に位置を決定できる。最小二乗方法を使用するか、または衛星軌道の数学的モデルに基づくカルマンフィルタを使用することが望ましい。
【0062】
このように、衛星位置を見つけた後に、衛星が受信したメッセージ、従ってデジタルデータに含まれるメッセージを送信できたAIS送信機を、より高い精度で識別できる。既に処理したデータ内のメッセージをサーチし、次にデジタルデータ内のメッセージをサーチし続けることができる。
【0063】
図3の例に示されるようにデータベースを更新する。
【符号の説明】
【0064】
10 船舶
12 AISトランシーバ
14 LEO衛星
16 地上局
18 コントロールセンター
20 GNSS衛星
22 LEO衛星の軌跡
24 無線ナビゲーション信号
26 データベース
28 船舶の新しい位置
30 船舶の最終位置
32 閉じた陸上エリア
34 フットプリント
36 vsatを示す矢印
38 等ドップラーライン
40 周波数のセルに対応するハッチングのつけられたバンド
42 ローカルゾーン
E10 データを補足するステップ
E12 衛星の軌跡を決定するステップ
E12’ 衛星位置を最初に推定するステップ
E12” 衛星位置を推定するステップ
E14 AIS送信機を識別するステップ
E16 フラグメント状疑似メッセージを合成するステップ
E18 デジタルデータ内の候補メッセージをサーチするステップ
E20 発見されたメッセージの未知の部分をデコードするステップ
E22 データベースを更新するステップ
E24 AIS送信機のマップをディスプレイするステップ
R 半径
【特許請求の範囲】
【請求項1】
少なくとも1つのAISチャンネルにて衛星によって受信された信号を示すデジタルデータを提供するステップと、
デジタルデータとフラグメント状疑似メッセージとを相関化することにより、デジタルデータ内の候補メッセージを識別するステップ(E18)とを含む、AISメッセージを検出するための方法において、
前記フラグメント状疑似メッセージが、送信時間および/または送信機の位置に依存すると共にAIS送信機のデータベース(26)の支援により決定される少なくとも1つのAISメッセージフラグメントを含むことを特徴とする、AISメッセージを検出するための方法。
【請求項2】
前記フラグメント状疑似メッセージが、送信位置に応じて決まる少なくとも1つのAISメッセージフラグメントを含み、前記フラグメント状疑似メッセージを合成することは、
前記信号の受信時に衛星によるサービスを受けるゾーン内に位置するAIS送信機を、AIS送信機のデータベースに基づいて識別するステップ(E14)と、
前記識別された送信機の、前記データベースに記憶されていた位置に基づき、送信機の位置に応じた少なくとも1つのAISメッセージフラグメントを決定するステップとを含むことを特徴とする、請求項1に記載の方法。
【請求項3】
前記送信機の位置に応じて決まる少なくとも1つのAISメッセージフラグメントは、「経度」フィールドからの最大位ビットおよび/または「緯度」フィールドからの最大位ビットを含むことを特徴とする、請求項2に記載の方法。
【請求項4】
前記デジタルデータにはタイムスタンプが押されており、前記フラグメント状疑似メッセージは、送信時間に応じて決まる1つ以上のAISメッセージフラグメントを含み、前記フラグメント状疑似メッセージを合成するステップは、前記デジタルデータのタイムスタンプに基づき、送信時間に応じて決まる少なくとも1つのAISメッセージフラグメントを決定することを含む、請求項1〜3のうちのいずれか1項に記載の方法。
【請求項5】
送信時間に依存するする少なくとも1つのAISメッセージフラグメントは、「タイムスタンプ」フィールドからのビット、または「UTC年」、「UTC月」、「UTC日」、「UTC時」、「UTC分」および/または「UTC秒」フィールドからのビットを含むことを特徴とする、請求項4に記載の方法。
【請求項6】
前記フラグメント状疑似メッセージは、前記データベース内で識別された前記送信機に固有の1つ以上のスタティックフィールド、例えば「ユーザーID」フィールド、「AISバージョンインジケータ」フィールド、「IMO番号」フィールド、「コールサイン」フィールド、「ネーム」フィールド、「船舶のタイプおよび積荷のタイプ」フィールド、「位置に対する全寸法/基準」フィールド、「電子位置固定デバイスのタイプ」フィールドからのビットを含むことを特徴とする、請求項1〜5のうちのいずれか1項に記載の方法。
【請求項7】
前記フラグメント状疑似メッセージは、前記データベース内で識別された前記送信機に固有の1つ以上のアクティーブフィールド、例えば「RAIMフラグ」フィールド、「特殊操縦インジケータ」フィールド、「推定到着時間」フィールド、「現在のドロート」フィールド、「目的地」フィールド、「ナビゲーションステータス」フィールド、「地上のコース」フィールド、「地上の速度」フィールドおよび/または「通信ステータス」フィールドからのビットを含むことを特徴とする、請求項1〜6のうちのいずれか1項に記載の方法。
【請求項8】
デジタルデータ内の候補メッセージが一旦識別された場合、前記候補メッセージをデコードすること(E20)、および前記デコードされたメッセージ内に含まれる情報を使ってAIS送信機の前記データベースを更新すること(E22)を特徴とする、請求項1〜7のうちのいずれか1項に記載の方法。
【請求項9】
前記デジタルデータと複数のフラグメント状疑似メッセージとを相関化することにより、前記候補メッセージ(E18)を識別し、種々の相関値をシリアルおよび/またはパラレルに計算することを特徴とする、請求項1〜8のうちのいずれか1項に記載の方法。
【請求項10】
前記フラグメント状疑似メッセージは、前記候補メッセージ内のスタッフィングビットが存在するか、存在しないかを検査するようになっていることを特徴とする、請求項9に記載の方法。
【請求項11】
前記デジタルデータ内の1つ以上のAISメッセージを識別した送信機に対する三角測量により、前記信号受信時の前記衛星の位置を推定する(E12”)ことを特徴とする、請求項1〜10のうちのいずれか1項に記載の方法。
【請求項12】
前記デジタルデータと前記フラグメント状疑似メッセージとを相関化するために、前記フラグメント状疑似メッセージのスタートと前記AIS時間フレームのうちの時間インターバルのスタートとを同期化することを特徴とする、請求項1〜11のうちのいずれか1項に記載の方法。
【請求項13】
前記デジタルデータと前記フラグメント状疑似メッセージとを相関化するために、前記フラグメント状疑似メッセージに対する計算されたドップラーシフトを送信機位置の関数として補償することを特徴とする、請求項1〜12のうちのいずれか1項に記載の方法。
【請求項14】
前記ドップラーシフトを補償するために、前記データベースに記憶されている送信機のキャリア周波数の誤差を考慮する(26)ことを特徴とする、請求項13に記載の方法。
【請求項15】
前記デジタルデータと前記フラグメント状疑似メッセージとを相関化するために、前記データベースに記憶されている前記送信機の変調指数を考慮する(26)ことを特徴とする、請求項1〜14のうちのいずれか1項に記載の方法。
【請求項16】
コンピュータによる実行時に前記請求項1〜15のうちのいずれか1項に記載の方法を、前記コンピュータに実行させる、コンピュータで実行可能な命令を含むデータ記憶媒体を含む、コンピュータソフトウェア製品。
【請求項1】
少なくとも1つのAISチャンネルにて衛星によって受信された信号を示すデジタルデータを提供するステップと、
デジタルデータとフラグメント状疑似メッセージとを相関化することにより、デジタルデータ内の候補メッセージを識別するステップ(E18)とを含む、AISメッセージを検出するための方法において、
前記フラグメント状疑似メッセージが、送信時間および/または送信機の位置に依存すると共にAIS送信機のデータベース(26)の支援により決定される少なくとも1つのAISメッセージフラグメントを含むことを特徴とする、AISメッセージを検出するための方法。
【請求項2】
前記フラグメント状疑似メッセージが、送信位置に応じて決まる少なくとも1つのAISメッセージフラグメントを含み、前記フラグメント状疑似メッセージを合成することは、
前記信号の受信時に衛星によるサービスを受けるゾーン内に位置するAIS送信機を、AIS送信機のデータベースに基づいて識別するステップ(E14)と、
前記識別された送信機の、前記データベースに記憶されていた位置に基づき、送信機の位置に応じた少なくとも1つのAISメッセージフラグメントを決定するステップとを含むことを特徴とする、請求項1に記載の方法。
【請求項3】
前記送信機の位置に応じて決まる少なくとも1つのAISメッセージフラグメントは、「経度」フィールドからの最大位ビットおよび/または「緯度」フィールドからの最大位ビットを含むことを特徴とする、請求項2に記載の方法。
【請求項4】
前記デジタルデータにはタイムスタンプが押されており、前記フラグメント状疑似メッセージは、送信時間に応じて決まる1つ以上のAISメッセージフラグメントを含み、前記フラグメント状疑似メッセージを合成するステップは、前記デジタルデータのタイムスタンプに基づき、送信時間に応じて決まる少なくとも1つのAISメッセージフラグメントを決定することを含む、請求項1〜3のうちのいずれか1項に記載の方法。
【請求項5】
送信時間に依存するする少なくとも1つのAISメッセージフラグメントは、「タイムスタンプ」フィールドからのビット、または「UTC年」、「UTC月」、「UTC日」、「UTC時」、「UTC分」および/または「UTC秒」フィールドからのビットを含むことを特徴とする、請求項4に記載の方法。
【請求項6】
前記フラグメント状疑似メッセージは、前記データベース内で識別された前記送信機に固有の1つ以上のスタティックフィールド、例えば「ユーザーID」フィールド、「AISバージョンインジケータ」フィールド、「IMO番号」フィールド、「コールサイン」フィールド、「ネーム」フィールド、「船舶のタイプおよび積荷のタイプ」フィールド、「位置に対する全寸法/基準」フィールド、「電子位置固定デバイスのタイプ」フィールドからのビットを含むことを特徴とする、請求項1〜5のうちのいずれか1項に記載の方法。
【請求項7】
前記フラグメント状疑似メッセージは、前記データベース内で識別された前記送信機に固有の1つ以上のアクティーブフィールド、例えば「RAIMフラグ」フィールド、「特殊操縦インジケータ」フィールド、「推定到着時間」フィールド、「現在のドロート」フィールド、「目的地」フィールド、「ナビゲーションステータス」フィールド、「地上のコース」フィールド、「地上の速度」フィールドおよび/または「通信ステータス」フィールドからのビットを含むことを特徴とする、請求項1〜6のうちのいずれか1項に記載の方法。
【請求項8】
デジタルデータ内の候補メッセージが一旦識別された場合、前記候補メッセージをデコードすること(E20)、および前記デコードされたメッセージ内に含まれる情報を使ってAIS送信機の前記データベースを更新すること(E22)を特徴とする、請求項1〜7のうちのいずれか1項に記載の方法。
【請求項9】
前記デジタルデータと複数のフラグメント状疑似メッセージとを相関化することにより、前記候補メッセージ(E18)を識別し、種々の相関値をシリアルおよび/またはパラレルに計算することを特徴とする、請求項1〜8のうちのいずれか1項に記載の方法。
【請求項10】
前記フラグメント状疑似メッセージは、前記候補メッセージ内のスタッフィングビットが存在するか、存在しないかを検査するようになっていることを特徴とする、請求項9に記載の方法。
【請求項11】
前記デジタルデータ内の1つ以上のAISメッセージを識別した送信機に対する三角測量により、前記信号受信時の前記衛星の位置を推定する(E12”)ことを特徴とする、請求項1〜10のうちのいずれか1項に記載の方法。
【請求項12】
前記デジタルデータと前記フラグメント状疑似メッセージとを相関化するために、前記フラグメント状疑似メッセージのスタートと前記AIS時間フレームのうちの時間インターバルのスタートとを同期化することを特徴とする、請求項1〜11のうちのいずれか1項に記載の方法。
【請求項13】
前記デジタルデータと前記フラグメント状疑似メッセージとを相関化するために、前記フラグメント状疑似メッセージに対する計算されたドップラーシフトを送信機位置の関数として補償することを特徴とする、請求項1〜12のうちのいずれか1項に記載の方法。
【請求項14】
前記ドップラーシフトを補償するために、前記データベースに記憶されている送信機のキャリア周波数の誤差を考慮する(26)ことを特徴とする、請求項13に記載の方法。
【請求項15】
前記デジタルデータと前記フラグメント状疑似メッセージとを相関化するために、前記データベースに記憶されている前記送信機の変調指数を考慮する(26)ことを特徴とする、請求項1〜14のうちのいずれか1項に記載の方法。
【請求項16】
コンピュータによる実行時に前記請求項1〜15のうちのいずれか1項に記載の方法を、前記コンピュータに実行させる、コンピュータで実行可能な命令を含むデータ記憶媒体を含む、コンピュータソフトウェア製品。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−109753(P2013−109753A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−183729(P2012−183729)
【出願日】平成24年8月23日(2012.8.23)
【出願人】(507233361)セントル・ナショナル・デチュード・スパシアル (7)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2012−183729(P2012−183729)
【出願日】平成24年8月23日(2012.8.23)
【出願人】(507233361)セントル・ナショナル・デチュード・スパシアル (7)
【Fターム(参考)】
[ Back to top ]