
ATC車上速度制御装置、列車制御システム、及び、制御方法
【課題】運転時隔の短縮を図るとともに、運転士優先の車内信号式ATCの実現。
【解決手段】先行列車の在線区間の後方に防護区間が定められ、この防護区間の外方に速度制限区間が定められ、速度制限区間と防護区間との境界を目標停止位置とする。そして、地上装置から、目標停止位置及び終端速度を含むATC信号を送信し、車上装置では、受信したATC信号に含まれる目標停止位置での制限速度が終端速度なるような速度照査パターンを作成し、この速度照査パターンに従った速度制御(制動制御)が行われる。終端速度は、防護区間内において停止可能な防護区間への進入速度の上限速度として定められる。
【解決手段】先行列車の在線区間の後方に防護区間が定められ、この防護区間の外方に速度制限区間が定められ、速度制限区間と防護区間との境界を目標停止位置とする。そして、地上装置から、目標停止位置及び終端速度を含むATC信号を送信し、車上装置では、受信したATC信号に含まれる目標停止位置での制限速度が終端速度なるような速度照査パターンを作成し、この速度照査パターンに従った速度制御(制動制御)が行われる。終端速度は、防護区間内において停止可能な防護区間への進入速度の上限速度として定められる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、列車制御システム等に関する。
【背景技術】
【0002】
従来の車内信号閉そく式ATC(Automatic Train Control)は、信号方式として車内信号機を用いたATCである。ATCは、列車の走行速度が定められた許容速度を超えると、自動的にブレーキを作動させて減速し速度を制限する方式である。車内信号機は、現在の進路(閉そく区間)の状態を示し、その信号現示は「車内進行信号(G灯)」及び「車内停止信号(R灯)」の二種類であり、それぞれに、制限速度或いは条件が定められている。
【0003】
また、ブレーキ制御方式として、多段ブレーキ制御、及び、一段ブレーキ制御がある。多段ブレーキ制御では、先行列車の位置に基づいて、この先行列車より後方の閉そく区間それぞれに、先行列車に近いほど低くなるように許容速度が段階的に定められる。そして、後続列車では、位置している閉そく区間に定められた許容速度を超過すると自動的にブレーキを作動させ、走行速度が低下して許容速度を下回るとブレーキが緩むように、速度制御(制動制御)がなされる。しかしながら、多段ブレーキ制御方式では、段階的に減速していくため、閉そく区間の境界を通過する毎にブレーキが作動するといった状態が起こり、乗り心地が悪いという問題があった。
【0004】
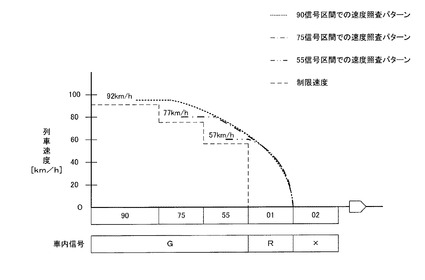
そこで、このような問題点を改善するため、一段ブレーキ制御方式が開発された。図7は、一段ブレーキ制御方式のブレーキパターン(速度照査パターン)の一例を示す図である。図7に示すように、一段ブレーキ制御では、先行列車の在線区間の後方区間から順に、02信号、01信号、55信号、75信号、90信号を配置し、車内信号機の信号現示は、02信号区間では×現示を表示させ、01信号区間ではR現示を表示させ、55信号区間を含む55信号区間の手前方ではG現示を表示させる。そして、75信号区間、55信号区間、及び、01信号区間のそれぞれに、定められた制限速度を超過して進入するとブレーキが作動し、01信号区間の終端までに停止するまでブレーキは緩まない。
【0005】
一段ブレーキ制御では、一度ブレーキが作動すると停止するまでブレーキが緩まないため、滑走等によりブレーキ力が損なわれた場合を担保するよう、先行列車と停止位置との間に、進入すると非常ブレーキを作動させる02信号区間を設ける必要がある。このような一段ブレーキ制御によれば、多段ブレーキ制御に比較して、ブレーキ開始位置を前方(前方列車に近い位置)とすることができ、列車の運転間隔を短くすることができるとともに、乗り心地が改善される(例えば、非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】村本道明、「東急田園都市線・新玉川線のATCシステム」、鉄道と電気技術、VOL.1、No.1、日本鉄道電気技術協会、平成2年7月発行、p.15−24
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、従来の車内信号閉そく式ATCにおける一段ブレーキ制御では、01信号区間は列車進入を許容するが、進入すると無条件の停止制御となる。つまり、01信号区間の進入速度によって停止位置が異なる。すなわち、低速で進入すると、停止位置が区間の進入直後の位置となり、先行列車との間隔が長くなる結果、運転時隔が長くなり得た。
【0008】
また、車内信号閉そく式では、車内信号機は、現在の進路(閉そく区間)の信号現示を表示する。つまり、内方区間の現示がその区間に進入するまで表示されないため、現在の走行区間より速度制限が下位の区間に進入すると、運転士の手動ブレーキの前にブレーキが自動的に作動し、乗り心地が悪くなる。また、運転士は、新たな区間に進入する都度、自動ブレーキが作動する可能性を感じながら運転することとなる。このため、新たな区間に進入する手前で減速操作をする場合があり、運転時間が長くなる場合があった。
【0009】
本発明は、上記事情に鑑みてなされたものであり、その目的とするところは、運転時隔の短縮を図るとともに、運転士優先の車内信号式ATCを実現することである。
【課題を解決するための手段】
【0010】
上記課題を解決するための第1の形態は、
ATC送信器から受信した情報に基づいて、1)列車の目標停止位置と、2)当該目標停止位置の内方の防護区間と、3)当該目標停止位置を冒進又は過走した場合に当該防護区間内で列車を停止させることが可能な有速度でなる当該目標停止位置における制限速度と、を設定する設定手段と、
前記目標停止位置での照査速度を前記制限速度とする速度照査パターンを作成する速度照査パターン作成手段と、
走行位置を判定する走行位置判定手段と、
前記目標停止位置の手前方において前記速度照査パターンを用いて列車速度を制御する第1の速度制御手段と、
前記防護区間において列車を停止させるための速度制御を行う第2の速度制御手段と、
を備えたATC車上速度制御装置である。
【0011】
また、他の形態として、
ATC車上速度制御装置の制御方法であって、
ATC送信器から受信した情報に基づいて、1)列車の目標停止位置と、2)当該目標停止位置の内方の防護区間と、3)当該目標停止位置を冒進又は過走した場合に当該防護区間内で列車を停止させることが可能な有速度でなる当該目標停止位置における制限速度と、を設定する設定ステップと、
前記目標停止位置での照査速度を前記制限速度とする速度照査パターンを作成する速度照査パターン作成ステップと、
前記目標停止位置の手前方において前記速度照査パターンを用いて列車速度を制御する第1の速度制御ステップと、
前記防護区間において列車を停止させるための速度制御を行う第2の速度制御ステップと、
を含む制御方法を構成しても良い。
【0012】
この第1の形態等によれば、ATC車上装置では、ATC送信器から受信した情報をもとに速度照査パターンを作成し、この速度照査パターンを用いて列車速度を制御するが、この速度照査パターンは、目標停止位置における制限速度が有速度となるように作成される。一方、運転士は、目標停止位置で停止するようにブレーキ制御を行う。このため、速度照査パターンで定められる制限速度は、目標停止位置で停止するための制限速度に対して余裕を持った速度となり、少なくとも目標停止位置近傍においては、運転士優先の速度制御が実現されるといえる。すなわち、運転士優先の速度制御によって運転士の操作で列車を目標停止位置に停止させることができるため、先行列車との間隔を短くでき、運転時隔の短縮を図ることが可能となる。
【0013】
また、第2の形態として、第1の形態のATC車上速度制御装置であって、
現在の走行位置から前記目標停止位置までの接近距離に基づき、前記目標停止位置に接近した旨を示す接近報知を行う接近報知手段を更に備えたATC車上速度制御装置を構成しても良い。
【0014】
この第2の形態によれば、現在の走行位置から目標停止位置までの接近距離に基づき、目標停止位置に接近した旨を示す接近報知が行われる。この接近報知により、運転士は、目標停止位置への接近を知ることができ、適切なタイミングで減速操作をすることが可能となる。
【0015】
第3の形態として、第2の形態のATC車上速度制御装置であって、
前記接近報知手段は、前記接近距離に基づいて少なくとも2段階の接近報知を行う、
ATC車上速度制御装置を構成しても良い。
【0016】
この第3の形態によれば、目標停止位置に接近した旨を示す接近報知として、接近距離に基づいて、少なくとも2段階の接近報知が行われる。具体的には、例えば先ず、減速が必要な旨を報知し、次いで、停止を促すといった報知を行うことで、ブレーキ制御の程度を運転士に知らせることができる。
【0017】
更に、第4の形態として、第1〜第3の何れかの形態のATC車上速度制御装置と、ATC送信器と、地上装置とを具備した列車制御システムであって、
前記地上装置は、
前記ATC車上速度制御装置を備えた列車の前方直近の列車位置或いは当該列車の停車駅位置に基づいて当該列車の目標停止位置を決定する目標停止位置決定手段と、
前記目標停止位置決定手段により決定された目標停止位置を超えて進入した場合の防護区間の所与の防護区間長と当該防護区間進入時の空走時分とに基づいて当該目標停止位置における制限速度を算出する目標速度算出手段と、
前記目標停止位置決定手段により決定された目標停止位置および前記目標速度算出手段により算出された制限速度を含む情報を、前記ATC車上速度制御装置に向けて前記ATC送信器に送信させる送信制御手段と、
を備える、
列車制御システムを構成しても良い。
【図面の簡単な説明】
【0018】
【図1】列車制御システムの構成図。
【図2】速度制御の概要図。
【図3】初速度と制動距離との関係の一例。
【図4】ATC信号の送信の説明図。
【図5】車上装置の内部構成図。
【図6】駅構内区間での速度制御の概要図。
【図7】従来の一段ブレーキ制御の説明図。
【発明を実施するための形態】
【0019】
以下、図面を参照して、本発明の実施形態を説明する。但し、本発明の適用可能な実施形態がこれに限定されるものではない。
【0020】
[構成]
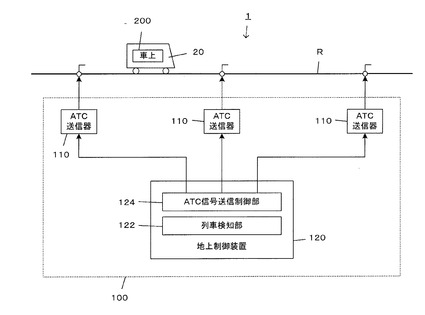
図1は、本実施形態における列車制御システム1の概略構成図である。図1によれば、この列車制御システム1は、地上装置100と、軌道Rを走行する列車20に搭載される車上装置(ATC車上速度制御装置)200とから構成される。
【0021】
地上装置100は、ATC送信器110と、地上制御装置120とを有している。ATC送信器110は、各軌道回路(閉そく区間)の進出側の境界に接続され、地上制御装置120によって生成されたATC信号(デジタル信号)を軌道回路に送信する。地上制御装置120は、軌道上の列車の位置を軌道回路単位で検知し、検知した列車の在線位置区間に応じて、列車に速度制御を行わせるためのATC信号を、ATC送信器110から送信させる。
【0022】
車上装置200は、軌道回路から受信したATC信号に基づく列車20の速度制御を行う。具体的には、受信したATC信号に基づく速度照査パターンを作成し、この速度照査パターンに従った速度制御(制動制御)を行う。なお、列車における速度制御は運転士による手動運転が優先され、この速度照査パターンに従った速度制御は、運転士による手動運転のバックアップとして用いられる。
【0023】
[原理]
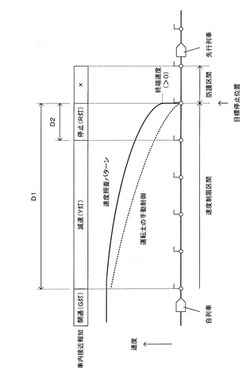
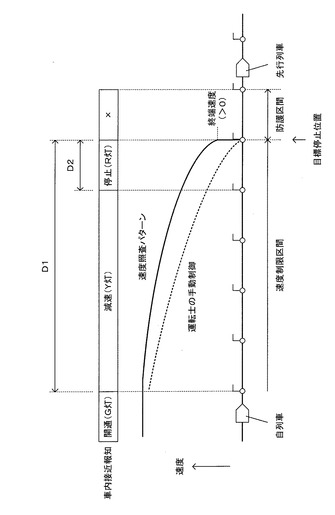
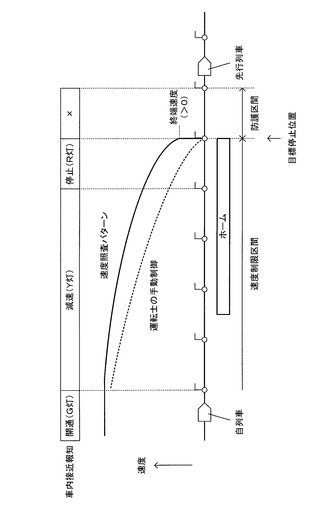
図2は、列車制御システム1における列車制御の説明図である。図2では、右方向を列車の進行方向として、自列車の速度照査パターンと、自列車の車内における接近報知とを示している。
【0024】
図2に示すように、先ず、先行列車の在線区間の後方の区間(閉そく区間)が、自列車の過走又は冒進を防護するための防護区間として定められる。次いで、この防護区間の外方に隣接する区間(複数の閉そく区間)が、自列車の速度制限を行う速度制限区間として定められる。この速度制限区間と防護区間との境界が、自列車の目標停止位置となる。
【0025】
そして、自列車の速度照査パターンは、目標停止位置における照査速度が、所定の有速度である終端速度となるように作成される。終端速度は、防護区間への進入速度であって、防護区間内において停止可能な上限速度として定められる。具体的には、防護区間の区間長、及び、防護区間への進入の際に想定される空走時分をもとに定められる。
【0026】
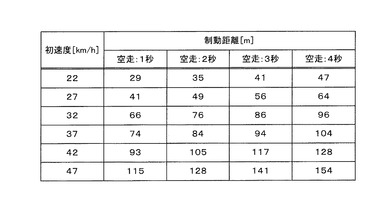
図3は、列車の初速度と制動距離との関係の一例を示す図である。図3では、列車の初速度それぞれに、停止までに必要な距離である制動距離を、ブレーキが作動し始めるまでの空走時分が異なる場合それぞれに対応付けて示している。例えば、防護区間の区間長が「70m」の場合、「10m」の制動余裕を見込むと、「60m」が制動限界距離となる。また、図3に示す関係によれば、防護区間への進入時の無信号検知時間である空走時分を「3秒」以下とすると、制動距離が制動限界距離である「60m」以下となるためには、初速度が「27km/h」以下でなければならない。そして、速度照査誤差(速度検出誤差を含む)を考慮すると、終端速度は、例えば「25km/h」として定められる。
【0027】
また、図2に示すように、車内では、目標停止位置までの距離(接近距離)に応じた接近報知がなされる。この接近報知は、運転士に対して速度制御(ブレーキ制御)を指示するためになされ、例えば、車内信号機における信号現示のように、複数種類の接近報知を灯色によって表示することで実現される。
【0028】
すなわち、目標停止位置までの距離が所定距離D1に達するまでは、「進行指示(例えば、青色灯)」を表示する。この所定距離D1は、例えば、現在の走行速度(或いは、軌道に定められた制限速度)をもとに、目標停止位置に停止するために減速を開始する必要がある距離として定められる。そして、目標停止位置までの距離が所定距離D1以下となると、目標停止位置に停止するために減速する必要があることを示す「減速指示(例えば、黄色灯)」を表示する。次いで、目標停止位置までの距離が所定距離D2(<D1)以下となると、停止目標位置に接近しており、停止目標位置への停止を指示する指示「停止指示(例えば、赤色灯)」を表示する。更に走行し、停止目標位置を超えて「防護区間」へ進入すると、非常ブレーキを作動させる「強制停止(例えば、×現示)」を表示する。
【0029】
図1に示したように、地上制御装置120は、列車検知部122と、ATC信号送信制御部124とを有している。
【0030】
列車検知部122は、軌道上の列車の位置を軌道回路単位で検知する。軌道回路では、当該軌道回路内に列車が進入した際に、当該列車の車輪及び車軸でなる輪軸によって左右のレール間が短絡されることにより、当該軌道回路の送端側から送出された電圧の受信側での受電レベルが低下することを利用して、当該軌道回路内に列車が在線していることを検知する。列車検知部122は、不図示の伝送ラインを介して各軌道回路からの検知結果を受信することで、列車の位置を検知する。
【0031】
ATC信号送信制御部124は、列車検知部122によって検知された列車位置をもとに、各列車が速度制御(制動制御)を行うためのATC信号を、ATC送信器110から軌道回路に送信させる。
【0032】
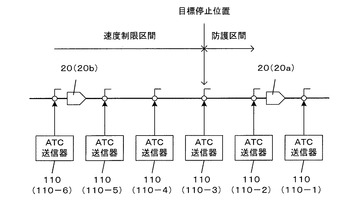
具体的には、図4に示すように、先行列車(列車20a)の在線位置(在線区間)の後方直近の区間(閉そく区間)を防護区間とし、この防護区間の外方に隣接するN個の区間(N個の閉そく区間)を速度制限区間とする。そして、この防護区間と速度制限区間との境界を、後続列車(列車20b)の目標停止位置とする。
【0033】
また、この目標停止位置での終端速度を決定する。すなわち、例えば、図3に一例を示すように定められる初速度と制動距離との関係に従い、防護区間の区間長と、想定する空走時分とに応じて、目標停止位置での終端速度(制限速度)を決定する。そして、決定した目標停止位置及び終端速度を含むATC信号を、後続列車(列車20b)に向けて、先行列車(列車20a)の後方の閉そく区間に接続されているATC送信器(ATC送信器110)から送信させる。このATC信号送信制御部124が「目標停止位置決定手段」、「目標速度算出手段」及び「送信制御手段」に対応する。
【0034】
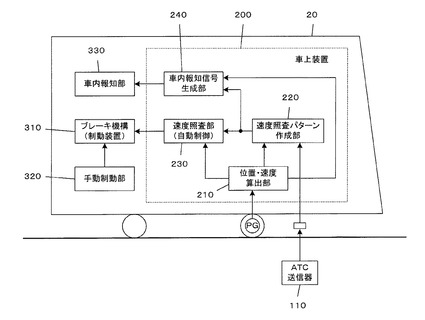
図5は、車上装置200の内部構成図である。図5によれば、車上装置200は、位置・速度算出部210と、速度照査パターン作成部220と、速度照査部230と、車内報知信号生成部240とを有している。
【0035】
位置・速度算出部210は、車軸に取り付けられた速度発電機の回転数の計測値をもとに、自列車の現在の走行位置(走行距離)及び走行速度を算出する。更に、地上子(不図示)の近傍の通過時に、該地上子と無線通信によって取得した地上子IDから通過した地上子を識別し、走行位置を補正する。この位置・速度算出部210が「走行位置判定手段」に対応する。
【0036】
速度照査パターン作成部220は、ATC送信器110から受信したATC信号をもとに、速度照査パターンを作成する。具体的には、受信したATC信号に含まれる目標停止位置を、次の目標停止位置として設定するとともに、該ATC信号に含まれる終端速度を、該目標停止位置における制限速度として設定する。また、該目標停止位置の内方の区間(閉そく区間)を防護区間として設定する。そして、設定した目標停止位置における照査速度を設定した制限速度とした速度照査パターンを作成する。この速度操作パターン作成部220が「設定手段」及び「速度照査パターン作成手段」に対応する。
【0037】
速度照査部230は、速度照査パターン作成部220によって作成された速度照査パターンに従った速度照査を行う。すなわち、速度照査パターンで定められる現在の走行位置の制限速度と、現在の走行速度を比較し、走行速度が制限速度を超える場合には、ブレーキ機構310を作動させて減速させる。更に、現在の走行位置が目標停止位置を超えて防護区間に進入した場合には、ブレーキを作動させて自列車を停止させる。なお、このブレーキ機構310は、列車の運転士による手動制御部320によっても作動される。この速度照査部230が「第1の速度制御手段」及び「第2の速度制御手段」に対応する。
【0038】
車内報知信号生成部240は、現在の走行位置から目標停止位置までの距離(接近距離)を算出し、この接近距離に応じた接近報知を、車内報知部330に表示させる。具体的には、接近距離が所定距離D1に達していないならば「進行指示」を表示させ、所定距離D1に達しているならば「減速指示」を表示させ、所定距離D2に達したならば「停止指示」を表示させ、停止する前に目標停止位置を超えたならば「強制停止」を表示させる。この車内報知信号生成部240が「接近報知手段」に対応する。
【0039】
[作用・効果]
このように、本実施形態によれば、地上装置から、目標停止位置及び終端速度を含むATC信号が軌道回路に送信され、車上装置では、受信したATC信号をもとに速度照査パターンを作成し、この速度照査パターンに従った速度制御(制動制御)が行われる。速度照査パターンは、受信した目標停止位置での制限速度が、受信した有速度である終端速度となるように作成される。また、運転士は、目標停止位置で停止するように速度制御(手動運転)を行う。つまり、速度照査パターンで定められる制限速度は、目標停止位置で停止するための制限速度に対して余裕を持った速度となる。このため、運転士優先の速度制御が実現される。また、運転士の手動制御によって、目標停止位置に停止するように速度制御されるため、従来の一段ブレーキ制御方式に比較して、停車時の先行列車との間隔を短くすることができる。
【0040】
なお、本発明の適用可能な実施形態は上述の実施形態に限定されることなく、本発明の趣旨を逸脱しない範囲で適宜変更可能なのは勿論である。
【0041】
(A)駅停車時
例えば、上述の実施形態では、列車の走行中における先行列車の位置に応じた速度制御を行う場合を説明したが、駅への停車時にも同様に適用可能である。具体的には、図6に示すように、駅構内区間では、停車駅に予め定められた停車位置を自列車の目標停止位置とする。また、この目標停止位置の内方区間を防護区間とするとともに、目標停止位置の外方区間を速度制限区間とする。次いで、上述した実施形態と同様に、防護区間の区間長や想定する空走時分をもとに、目標停止位置における制限速度を算出し、目標停止位置における制限速度を算出した制限速度とした速度照査パターンを作成する。そして、この速度照査パターンに従った速度制御(制動制御)を行う。
【符号の説明】
【0042】
1 列車制御システム
100 地上装置
110 ATC送信器
120 地上制御装置、122 列車検知部、124 ATC信号送信制御部
20 列車
200 車上装置
210 位置・速度算出部、220 速度照査パターン作成部
230 速度照査部、240 車内報知信号生成部
310 ブレーキ機構、320 手動制御部、330 車内報知部
【技術分野】
【0001】
本発明は、列車制御システム等に関する。
【背景技術】
【0002】
従来の車内信号閉そく式ATC(Automatic Train Control)は、信号方式として車内信号機を用いたATCである。ATCは、列車の走行速度が定められた許容速度を超えると、自動的にブレーキを作動させて減速し速度を制限する方式である。車内信号機は、現在の進路(閉そく区間)の状態を示し、その信号現示は「車内進行信号(G灯)」及び「車内停止信号(R灯)」の二種類であり、それぞれに、制限速度或いは条件が定められている。
【0003】
また、ブレーキ制御方式として、多段ブレーキ制御、及び、一段ブレーキ制御がある。多段ブレーキ制御では、先行列車の位置に基づいて、この先行列車より後方の閉そく区間それぞれに、先行列車に近いほど低くなるように許容速度が段階的に定められる。そして、後続列車では、位置している閉そく区間に定められた許容速度を超過すると自動的にブレーキを作動させ、走行速度が低下して許容速度を下回るとブレーキが緩むように、速度制御(制動制御)がなされる。しかしながら、多段ブレーキ制御方式では、段階的に減速していくため、閉そく区間の境界を通過する毎にブレーキが作動するといった状態が起こり、乗り心地が悪いという問題があった。
【0004】
そこで、このような問題点を改善するため、一段ブレーキ制御方式が開発された。図7は、一段ブレーキ制御方式のブレーキパターン(速度照査パターン)の一例を示す図である。図7に示すように、一段ブレーキ制御では、先行列車の在線区間の後方区間から順に、02信号、01信号、55信号、75信号、90信号を配置し、車内信号機の信号現示は、02信号区間では×現示を表示させ、01信号区間ではR現示を表示させ、55信号区間を含む55信号区間の手前方ではG現示を表示させる。そして、75信号区間、55信号区間、及び、01信号区間のそれぞれに、定められた制限速度を超過して進入するとブレーキが作動し、01信号区間の終端までに停止するまでブレーキは緩まない。
【0005】
一段ブレーキ制御では、一度ブレーキが作動すると停止するまでブレーキが緩まないため、滑走等によりブレーキ力が損なわれた場合を担保するよう、先行列車と停止位置との間に、進入すると非常ブレーキを作動させる02信号区間を設ける必要がある。このような一段ブレーキ制御によれば、多段ブレーキ制御に比較して、ブレーキ開始位置を前方(前方列車に近い位置)とすることができ、列車の運転間隔を短くすることができるとともに、乗り心地が改善される(例えば、非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】村本道明、「東急田園都市線・新玉川線のATCシステム」、鉄道と電気技術、VOL.1、No.1、日本鉄道電気技術協会、平成2年7月発行、p.15−24
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、従来の車内信号閉そく式ATCにおける一段ブレーキ制御では、01信号区間は列車進入を許容するが、進入すると無条件の停止制御となる。つまり、01信号区間の進入速度によって停止位置が異なる。すなわち、低速で進入すると、停止位置が区間の進入直後の位置となり、先行列車との間隔が長くなる結果、運転時隔が長くなり得た。
【0008】
また、車内信号閉そく式では、車内信号機は、現在の進路(閉そく区間)の信号現示を表示する。つまり、内方区間の現示がその区間に進入するまで表示されないため、現在の走行区間より速度制限が下位の区間に進入すると、運転士の手動ブレーキの前にブレーキが自動的に作動し、乗り心地が悪くなる。また、運転士は、新たな区間に進入する都度、自動ブレーキが作動する可能性を感じながら運転することとなる。このため、新たな区間に進入する手前で減速操作をする場合があり、運転時間が長くなる場合があった。
【0009】
本発明は、上記事情に鑑みてなされたものであり、その目的とするところは、運転時隔の短縮を図るとともに、運転士優先の車内信号式ATCを実現することである。
【課題を解決するための手段】
【0010】
上記課題を解決するための第1の形態は、
ATC送信器から受信した情報に基づいて、1)列車の目標停止位置と、2)当該目標停止位置の内方の防護区間と、3)当該目標停止位置を冒進又は過走した場合に当該防護区間内で列車を停止させることが可能な有速度でなる当該目標停止位置における制限速度と、を設定する設定手段と、
前記目標停止位置での照査速度を前記制限速度とする速度照査パターンを作成する速度照査パターン作成手段と、
走行位置を判定する走行位置判定手段と、
前記目標停止位置の手前方において前記速度照査パターンを用いて列車速度を制御する第1の速度制御手段と、
前記防護区間において列車を停止させるための速度制御を行う第2の速度制御手段と、
を備えたATC車上速度制御装置である。
【0011】
また、他の形態として、
ATC車上速度制御装置の制御方法であって、
ATC送信器から受信した情報に基づいて、1)列車の目標停止位置と、2)当該目標停止位置の内方の防護区間と、3)当該目標停止位置を冒進又は過走した場合に当該防護区間内で列車を停止させることが可能な有速度でなる当該目標停止位置における制限速度と、を設定する設定ステップと、
前記目標停止位置での照査速度を前記制限速度とする速度照査パターンを作成する速度照査パターン作成ステップと、
前記目標停止位置の手前方において前記速度照査パターンを用いて列車速度を制御する第1の速度制御ステップと、
前記防護区間において列車を停止させるための速度制御を行う第2の速度制御ステップと、
を含む制御方法を構成しても良い。
【0012】
この第1の形態等によれば、ATC車上装置では、ATC送信器から受信した情報をもとに速度照査パターンを作成し、この速度照査パターンを用いて列車速度を制御するが、この速度照査パターンは、目標停止位置における制限速度が有速度となるように作成される。一方、運転士は、目標停止位置で停止するようにブレーキ制御を行う。このため、速度照査パターンで定められる制限速度は、目標停止位置で停止するための制限速度に対して余裕を持った速度となり、少なくとも目標停止位置近傍においては、運転士優先の速度制御が実現されるといえる。すなわち、運転士優先の速度制御によって運転士の操作で列車を目標停止位置に停止させることができるため、先行列車との間隔を短くでき、運転時隔の短縮を図ることが可能となる。
【0013】
また、第2の形態として、第1の形態のATC車上速度制御装置であって、
現在の走行位置から前記目標停止位置までの接近距離に基づき、前記目標停止位置に接近した旨を示す接近報知を行う接近報知手段を更に備えたATC車上速度制御装置を構成しても良い。
【0014】
この第2の形態によれば、現在の走行位置から目標停止位置までの接近距離に基づき、目標停止位置に接近した旨を示す接近報知が行われる。この接近報知により、運転士は、目標停止位置への接近を知ることができ、適切なタイミングで減速操作をすることが可能となる。
【0015】
第3の形態として、第2の形態のATC車上速度制御装置であって、
前記接近報知手段は、前記接近距離に基づいて少なくとも2段階の接近報知を行う、
ATC車上速度制御装置を構成しても良い。
【0016】
この第3の形態によれば、目標停止位置に接近した旨を示す接近報知として、接近距離に基づいて、少なくとも2段階の接近報知が行われる。具体的には、例えば先ず、減速が必要な旨を報知し、次いで、停止を促すといった報知を行うことで、ブレーキ制御の程度を運転士に知らせることができる。
【0017】
更に、第4の形態として、第1〜第3の何れかの形態のATC車上速度制御装置と、ATC送信器と、地上装置とを具備した列車制御システムであって、
前記地上装置は、
前記ATC車上速度制御装置を備えた列車の前方直近の列車位置或いは当該列車の停車駅位置に基づいて当該列車の目標停止位置を決定する目標停止位置決定手段と、
前記目標停止位置決定手段により決定された目標停止位置を超えて進入した場合の防護区間の所与の防護区間長と当該防護区間進入時の空走時分とに基づいて当該目標停止位置における制限速度を算出する目標速度算出手段と、
前記目標停止位置決定手段により決定された目標停止位置および前記目標速度算出手段により算出された制限速度を含む情報を、前記ATC車上速度制御装置に向けて前記ATC送信器に送信させる送信制御手段と、
を備える、
列車制御システムを構成しても良い。
【図面の簡単な説明】
【0018】
【図1】列車制御システムの構成図。
【図2】速度制御の概要図。
【図3】初速度と制動距離との関係の一例。
【図4】ATC信号の送信の説明図。
【図5】車上装置の内部構成図。
【図6】駅構内区間での速度制御の概要図。
【図7】従来の一段ブレーキ制御の説明図。
【発明を実施するための形態】
【0019】
以下、図面を参照して、本発明の実施形態を説明する。但し、本発明の適用可能な実施形態がこれに限定されるものではない。
【0020】
[構成]
図1は、本実施形態における列車制御システム1の概略構成図である。図1によれば、この列車制御システム1は、地上装置100と、軌道Rを走行する列車20に搭載される車上装置(ATC車上速度制御装置)200とから構成される。
【0021】
地上装置100は、ATC送信器110と、地上制御装置120とを有している。ATC送信器110は、各軌道回路(閉そく区間)の進出側の境界に接続され、地上制御装置120によって生成されたATC信号(デジタル信号)を軌道回路に送信する。地上制御装置120は、軌道上の列車の位置を軌道回路単位で検知し、検知した列車の在線位置区間に応じて、列車に速度制御を行わせるためのATC信号を、ATC送信器110から送信させる。
【0022】
車上装置200は、軌道回路から受信したATC信号に基づく列車20の速度制御を行う。具体的には、受信したATC信号に基づく速度照査パターンを作成し、この速度照査パターンに従った速度制御(制動制御)を行う。なお、列車における速度制御は運転士による手動運転が優先され、この速度照査パターンに従った速度制御は、運転士による手動運転のバックアップとして用いられる。
【0023】
[原理]
図2は、列車制御システム1における列車制御の説明図である。図2では、右方向を列車の進行方向として、自列車の速度照査パターンと、自列車の車内における接近報知とを示している。
【0024】
図2に示すように、先ず、先行列車の在線区間の後方の区間(閉そく区間)が、自列車の過走又は冒進を防護するための防護区間として定められる。次いで、この防護区間の外方に隣接する区間(複数の閉そく区間)が、自列車の速度制限を行う速度制限区間として定められる。この速度制限区間と防護区間との境界が、自列車の目標停止位置となる。
【0025】
そして、自列車の速度照査パターンは、目標停止位置における照査速度が、所定の有速度である終端速度となるように作成される。終端速度は、防護区間への進入速度であって、防護区間内において停止可能な上限速度として定められる。具体的には、防護区間の区間長、及び、防護区間への進入の際に想定される空走時分をもとに定められる。
【0026】
図3は、列車の初速度と制動距離との関係の一例を示す図である。図3では、列車の初速度それぞれに、停止までに必要な距離である制動距離を、ブレーキが作動し始めるまでの空走時分が異なる場合それぞれに対応付けて示している。例えば、防護区間の区間長が「70m」の場合、「10m」の制動余裕を見込むと、「60m」が制動限界距離となる。また、図3に示す関係によれば、防護区間への進入時の無信号検知時間である空走時分を「3秒」以下とすると、制動距離が制動限界距離である「60m」以下となるためには、初速度が「27km/h」以下でなければならない。そして、速度照査誤差(速度検出誤差を含む)を考慮すると、終端速度は、例えば「25km/h」として定められる。
【0027】
また、図2に示すように、車内では、目標停止位置までの距離(接近距離)に応じた接近報知がなされる。この接近報知は、運転士に対して速度制御(ブレーキ制御)を指示するためになされ、例えば、車内信号機における信号現示のように、複数種類の接近報知を灯色によって表示することで実現される。
【0028】
すなわち、目標停止位置までの距離が所定距離D1に達するまでは、「進行指示(例えば、青色灯)」を表示する。この所定距離D1は、例えば、現在の走行速度(或いは、軌道に定められた制限速度)をもとに、目標停止位置に停止するために減速を開始する必要がある距離として定められる。そして、目標停止位置までの距離が所定距離D1以下となると、目標停止位置に停止するために減速する必要があることを示す「減速指示(例えば、黄色灯)」を表示する。次いで、目標停止位置までの距離が所定距離D2(<D1)以下となると、停止目標位置に接近しており、停止目標位置への停止を指示する指示「停止指示(例えば、赤色灯)」を表示する。更に走行し、停止目標位置を超えて「防護区間」へ進入すると、非常ブレーキを作動させる「強制停止(例えば、×現示)」を表示する。
【0029】
図1に示したように、地上制御装置120は、列車検知部122と、ATC信号送信制御部124とを有している。
【0030】
列車検知部122は、軌道上の列車の位置を軌道回路単位で検知する。軌道回路では、当該軌道回路内に列車が進入した際に、当該列車の車輪及び車軸でなる輪軸によって左右のレール間が短絡されることにより、当該軌道回路の送端側から送出された電圧の受信側での受電レベルが低下することを利用して、当該軌道回路内に列車が在線していることを検知する。列車検知部122は、不図示の伝送ラインを介して各軌道回路からの検知結果を受信することで、列車の位置を検知する。
【0031】
ATC信号送信制御部124は、列車検知部122によって検知された列車位置をもとに、各列車が速度制御(制動制御)を行うためのATC信号を、ATC送信器110から軌道回路に送信させる。
【0032】
具体的には、図4に示すように、先行列車(列車20a)の在線位置(在線区間)の後方直近の区間(閉そく区間)を防護区間とし、この防護区間の外方に隣接するN個の区間(N個の閉そく区間)を速度制限区間とする。そして、この防護区間と速度制限区間との境界を、後続列車(列車20b)の目標停止位置とする。
【0033】
また、この目標停止位置での終端速度を決定する。すなわち、例えば、図3に一例を示すように定められる初速度と制動距離との関係に従い、防護区間の区間長と、想定する空走時分とに応じて、目標停止位置での終端速度(制限速度)を決定する。そして、決定した目標停止位置及び終端速度を含むATC信号を、後続列車(列車20b)に向けて、先行列車(列車20a)の後方の閉そく区間に接続されているATC送信器(ATC送信器110)から送信させる。このATC信号送信制御部124が「目標停止位置決定手段」、「目標速度算出手段」及び「送信制御手段」に対応する。
【0034】
図5は、車上装置200の内部構成図である。図5によれば、車上装置200は、位置・速度算出部210と、速度照査パターン作成部220と、速度照査部230と、車内報知信号生成部240とを有している。
【0035】
位置・速度算出部210は、車軸に取り付けられた速度発電機の回転数の計測値をもとに、自列車の現在の走行位置(走行距離)及び走行速度を算出する。更に、地上子(不図示)の近傍の通過時に、該地上子と無線通信によって取得した地上子IDから通過した地上子を識別し、走行位置を補正する。この位置・速度算出部210が「走行位置判定手段」に対応する。
【0036】
速度照査パターン作成部220は、ATC送信器110から受信したATC信号をもとに、速度照査パターンを作成する。具体的には、受信したATC信号に含まれる目標停止位置を、次の目標停止位置として設定するとともに、該ATC信号に含まれる終端速度を、該目標停止位置における制限速度として設定する。また、該目標停止位置の内方の区間(閉そく区間)を防護区間として設定する。そして、設定した目標停止位置における照査速度を設定した制限速度とした速度照査パターンを作成する。この速度操作パターン作成部220が「設定手段」及び「速度照査パターン作成手段」に対応する。
【0037】
速度照査部230は、速度照査パターン作成部220によって作成された速度照査パターンに従った速度照査を行う。すなわち、速度照査パターンで定められる現在の走行位置の制限速度と、現在の走行速度を比較し、走行速度が制限速度を超える場合には、ブレーキ機構310を作動させて減速させる。更に、現在の走行位置が目標停止位置を超えて防護区間に進入した場合には、ブレーキを作動させて自列車を停止させる。なお、このブレーキ機構310は、列車の運転士による手動制御部320によっても作動される。この速度照査部230が「第1の速度制御手段」及び「第2の速度制御手段」に対応する。
【0038】
車内報知信号生成部240は、現在の走行位置から目標停止位置までの距離(接近距離)を算出し、この接近距離に応じた接近報知を、車内報知部330に表示させる。具体的には、接近距離が所定距離D1に達していないならば「進行指示」を表示させ、所定距離D1に達しているならば「減速指示」を表示させ、所定距離D2に達したならば「停止指示」を表示させ、停止する前に目標停止位置を超えたならば「強制停止」を表示させる。この車内報知信号生成部240が「接近報知手段」に対応する。
【0039】
[作用・効果]
このように、本実施形態によれば、地上装置から、目標停止位置及び終端速度を含むATC信号が軌道回路に送信され、車上装置では、受信したATC信号をもとに速度照査パターンを作成し、この速度照査パターンに従った速度制御(制動制御)が行われる。速度照査パターンは、受信した目標停止位置での制限速度が、受信した有速度である終端速度となるように作成される。また、運転士は、目標停止位置で停止するように速度制御(手動運転)を行う。つまり、速度照査パターンで定められる制限速度は、目標停止位置で停止するための制限速度に対して余裕を持った速度となる。このため、運転士優先の速度制御が実現される。また、運転士の手動制御によって、目標停止位置に停止するように速度制御されるため、従来の一段ブレーキ制御方式に比較して、停車時の先行列車との間隔を短くすることができる。
【0040】
なお、本発明の適用可能な実施形態は上述の実施形態に限定されることなく、本発明の趣旨を逸脱しない範囲で適宜変更可能なのは勿論である。
【0041】
(A)駅停車時
例えば、上述の実施形態では、列車の走行中における先行列車の位置に応じた速度制御を行う場合を説明したが、駅への停車時にも同様に適用可能である。具体的には、図6に示すように、駅構内区間では、停車駅に予め定められた停車位置を自列車の目標停止位置とする。また、この目標停止位置の内方区間を防護区間とするとともに、目標停止位置の外方区間を速度制限区間とする。次いで、上述した実施形態と同様に、防護区間の区間長や想定する空走時分をもとに、目標停止位置における制限速度を算出し、目標停止位置における制限速度を算出した制限速度とした速度照査パターンを作成する。そして、この速度照査パターンに従った速度制御(制動制御)を行う。
【符号の説明】
【0042】
1 列車制御システム
100 地上装置
110 ATC送信器
120 地上制御装置、122 列車検知部、124 ATC信号送信制御部
20 列車
200 車上装置
210 位置・速度算出部、220 速度照査パターン作成部
230 速度照査部、240 車内報知信号生成部
310 ブレーキ機構、320 手動制御部、330 車内報知部
【特許請求の範囲】
【請求項1】
ATC送信器から受信した情報に基づいて、1)列車の目標停止位置と、2)当該目標停止位置の内方の防護区間と、3)当該目標停止位置を冒進又は過走した場合に当該防護区間内で列車を停止させることが可能な有速度でなる当該目標停止位置における制限速度と、を設定する設定手段と、
前記目標停止位置での照査速度を前記制限速度とする速度照査パターンを作成する速度照査パターン作成手段と、
走行位置を判定する走行位置判定手段と、
前記目標停止位置の手前方において前記速度照査パターンを用いて列車速度を制御する第1の速度制御手段と、
前記防護区間において列車を停止させるための速度制御を行う第2の速度制御手段と、
を備えたATC車上速度制御装置。
【請求項2】
現在の走行位置から前記目標停止位置までの接近距離に基づき、前記目標停止位置に接近した旨を示す接近報知を行う接近報知手段を更に備えた請求項1に記載のATC車上速度制御装置。
【請求項3】
前記接近報知手段は、前記接近距離に基づいて少なくとも2段階の接近報知を行う、
請求項2に記載のATC車上速度制御装置。
【請求項4】
請求項1〜3の何れか一項に記載のATC車上速度制御装置と、ATC送信器と、地上装置とを具備した列車制御システムであって、
前記地上装置は、
前記ATC車上速度制御装置を備えた列車の前方直近の列車位置或いは当該列車の停車駅位置に基づいて当該列車の目標停止位置を決定する目標停止位置決定手段と、
前記目標停止位置決定手段により決定された目標停止位置を超えて進入した場合の防護区間の所与の防護区間長と当該防護区間進入時の空走時分とに基づいて当該目標停止位置における制限速度を算出する目標速度算出手段と、
前記目標停止位置決定手段により決定された目標停止位置および前記目標速度算出手段により算出された制限速度を含む情報を、前記ATC車上速度制御装置に向けて前記ATC送信器に送信させる送信制御手段と、
を備える、
列車制御システム。
【請求項5】
ATC車上速度制御装置の制御方法であって、
ATC送信器から受信した情報に基づいて、1)列車の目標停止位置と、2)当該目標停止位置の内方の防護区間と、3)当該目標停止位置を冒進又は過走した場合に当該防護区間内で列車を停止させることが可能な有速度でなる当該目標停止位置における制限速度と、を設定する設定ステップと、
前記目標停止位置での照査速度を前記制限速度とする速度照査パターンを作成する速度照査パターン作成ステップと、
前記目標停止位置の手前方において前記速度照査パターンを用いて列車速度を制御する第1の速度制御ステップと、
前記防護区間において列車を停止させるための速度制御を行う第2の速度制御ステップと、
を含む制御方法。
【請求項1】
ATC送信器から受信した情報に基づいて、1)列車の目標停止位置と、2)当該目標停止位置の内方の防護区間と、3)当該目標停止位置を冒進又は過走した場合に当該防護区間内で列車を停止させることが可能な有速度でなる当該目標停止位置における制限速度と、を設定する設定手段と、
前記目標停止位置での照査速度を前記制限速度とする速度照査パターンを作成する速度照査パターン作成手段と、
走行位置を判定する走行位置判定手段と、
前記目標停止位置の手前方において前記速度照査パターンを用いて列車速度を制御する第1の速度制御手段と、
前記防護区間において列車を停止させるための速度制御を行う第2の速度制御手段と、
を備えたATC車上速度制御装置。
【請求項2】
現在の走行位置から前記目標停止位置までの接近距離に基づき、前記目標停止位置に接近した旨を示す接近報知を行う接近報知手段を更に備えた請求項1に記載のATC車上速度制御装置。
【請求項3】
前記接近報知手段は、前記接近距離に基づいて少なくとも2段階の接近報知を行う、
請求項2に記載のATC車上速度制御装置。
【請求項4】
請求項1〜3の何れか一項に記載のATC車上速度制御装置と、ATC送信器と、地上装置とを具備した列車制御システムであって、
前記地上装置は、
前記ATC車上速度制御装置を備えた列車の前方直近の列車位置或いは当該列車の停車駅位置に基づいて当該列車の目標停止位置を決定する目標停止位置決定手段と、
前記目標停止位置決定手段により決定された目標停止位置を超えて進入した場合の防護区間の所与の防護区間長と当該防護区間進入時の空走時分とに基づいて当該目標停止位置における制限速度を算出する目標速度算出手段と、
前記目標停止位置決定手段により決定された目標停止位置および前記目標速度算出手段により算出された制限速度を含む情報を、前記ATC車上速度制御装置に向けて前記ATC送信器に送信させる送信制御手段と、
を備える、
列車制御システム。
【請求項5】
ATC車上速度制御装置の制御方法であって、
ATC送信器から受信した情報に基づいて、1)列車の目標停止位置と、2)当該目標停止位置の内方の防護区間と、3)当該目標停止位置を冒進又は過走した場合に当該防護区間内で列車を停止させることが可能な有速度でなる当該目標停止位置における制限速度と、を設定する設定ステップと、
前記目標停止位置での照査速度を前記制限速度とする速度照査パターンを作成する速度照査パターン作成ステップと、
前記目標停止位置の手前方において前記速度照査パターンを用いて列車速度を制御する第1の速度制御ステップと、
前記防護区間において列車を停止させるための速度制御を行う第2の速度制御ステップと、
を含む制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−249402(P2012−249402A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−118664(P2011−118664)
【出願日】平成23年5月27日(2011.5.27)
【出願人】(000001292)株式会社京三製作所 (324)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月27日(2011.5.27)
【出願人】(000001292)株式会社京三製作所 (324)
【Fターム(参考)】
[ Back to top ]