
CPAP治療中の漏出の判定
【課題】漏出源を詳細にモデリングすることなく、かつ漏出が発生する、呼吸サイクルにおける正確な位相を判定する必要性なく、CPAPシステムにおける瞬間漏出を迅速に判定する呼吸治療装置を提供する。
【解決手段】漏出モデルのパラメータの判定に使用されるローパスフィルタ値が平均化され、平均化ウィンドウの開始を設定するために、漏出は、1回の呼吸の間、遡及して各瞬間において判定され、妨害指数は、漏出が、急速に変化しているかどうかを示し、妨害が高い限り、使用される漏出推定値は、スライド呼吸ウィンドウ平均化を使用したものから、より強固で、より速く反応するローパスフィルタ方法へと、次第に変化し、推定呼吸流量を用いた測定値に基づく換気補助の調整は、減速または停止する構成とする。
【解決手段】漏出モデルのパラメータの判定に使用されるローパスフィルタ値が平均化され、平均化ウィンドウの開始を設定するために、漏出は、1回の呼吸の間、遡及して各瞬間において判定され、妨害指数は、漏出が、急速に変化しているかどうかを示し、妨害が高い限り、使用される漏出推定値は、スライド呼吸ウィンドウ平均化を使用したものから、より強固で、より速く反応するローパスフィルタ方法へと、次第に変化し、推定呼吸流量を用いた測定値に基づく換気補助の調整は、減速または停止する構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、無呼吸および他の呼吸器疾患の治療に関する。特に、本発明は、陽性気道圧に機械的を適用する場合の、漏れ空気量および実際の呼吸気流量の判定のための、方法および器具に関する。
【背景技術】
【0002】
無呼吸および他の呼吸器疾患の治療に対して、例えば、マスクを介して、吸気中にはより高く、呼気中にはより低くなり得る圧力で、呼吸可能なガスが、機械的呼吸器または人工呼吸器から供給される。(本明細書において、「マスク」へのいかなる言及も、鼻マスク、鼻/口マスク、鼻カニューレ/枕、および気管内または気管切開チューブを含む、個人の気道に呼吸可能なガスを送るための、すべての形態の装置を含むと理解されるものとする。「換気」という用語は、呼吸作業の一部を行う、全ての装置を説明するために使用される。)典型的に、治療の妥当性を評価するために、または人工呼吸器の操作を制御するために、機械的換気中に対象の呼吸気流量を測定する。
【0003】
呼吸気流量は、一般的に、マスクと圧力源との間のガス送達経路内に設置される、呼吸気流計で測定される。マスクと対象との間の漏出は、不可避である。呼吸気流計は、呼吸気流量+漏出を経た流量+通気口を経た流量(「意図的漏出」とも呼ばれる)の合計を測定する。漏出を経た瞬間流量が、既知である場合、呼吸気流量は、呼吸計における流量から、漏出を経た流量および通気口を経た流量を減算することにより計算され得る。典型的に、通気口を経た流量は、通気口における圧力の既知の関数であり、通気口における圧力が、妥当な正確さで推定され得ると仮定すると、通気口を経た流量は、容易に計算され得る。一方で、通気口の特徴が、用いられる漏出モデルに好適である場合、換気流および非意図的漏出は、ともにまとめられ、単一数量として推定され得る。通気口における圧力を使用した、換気流の直接推定は以下に仮定され、人工呼吸器の全流出量からのこの換気流の減算は、明確に言及されない場合には、行われたと仮定される。
【0004】
漏出を経た流量を修正するためのいくつかの方法では、(i)漏出が、略一定であり、(ii)十分長い時間にわたり、吸気および呼気の流量が、相殺されることを仮定する。これらの仮定が満たされる場合、十分長い時間にわたる呼吸計を経た平均流量は、漏出の規模と等しくなり、次いで、実際の呼吸気流量は、記載されるように計算され得る。
【0005】
既知の方法は、マスクにおける圧力が一定である場合のみ的確である。一方で、マスク圧力が時間とともに変化する場合(例えば、人工呼吸器の場合)、上記の仮定(i)は妥当ではなく、したがって、計算された呼吸気流量は、不正確である。これは、図1a〜図1fに顕著に示される。
【0006】
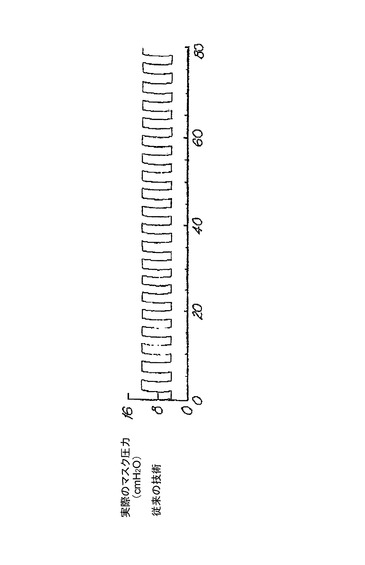
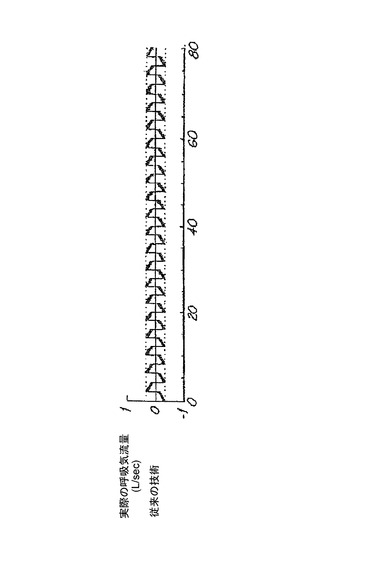
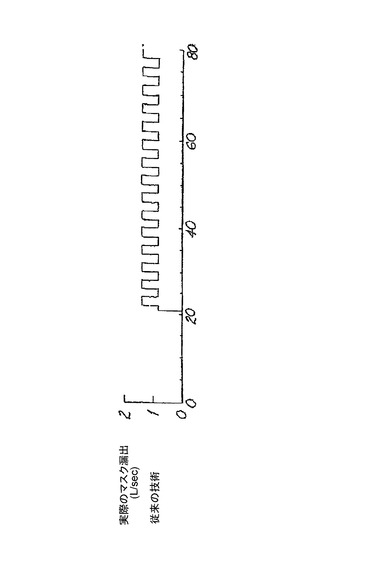
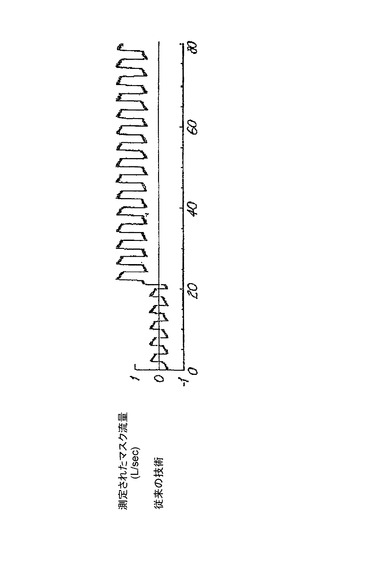
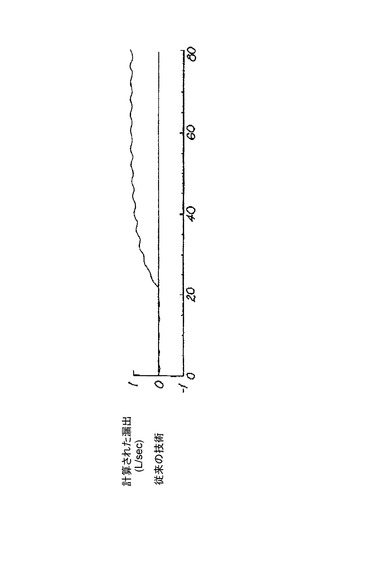
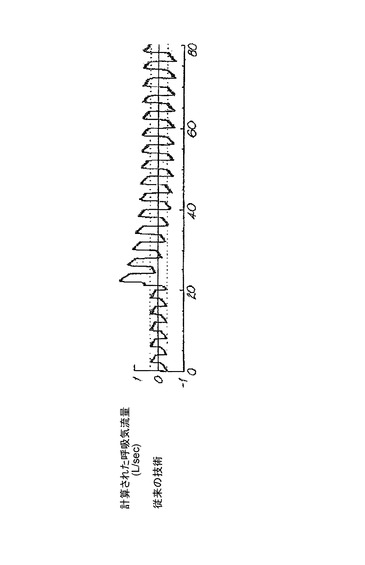
図1aは、呼気時約4cm H2Oと吸気時12cm H2Oとの間の二相性CPAP(持続的陽性気道圧)治療において、測定されたマスク圧力の記録を示す。図1bは、マスク圧力と同期した実際の呼吸気流量の記録を示す。図1cに示されるように、21秒の時間で、マスク漏出が発生し、治療圧力の関数である漏出からの漏れ流量をもたらす。ここで、図1dに示される測定されたマスク流量は、漏出流量による相殺を含む。次いで、従来技術の方法では、図1eに示されるように、複数の呼吸にわたり、計算された漏出流量を判定する。測定された流量−計算漏出流量として得られる計算された呼吸流量は、図1fに示され、正確な平均値に戻っているが、尺度が不正確なために計測されており、正および負のピーク空気流量の誤った表示を与える。
【0007】
別の従来技術の処理は、欧州公開第0 714 670 A2号に開示され、圧力依存性の漏出構成要素の計算を含む。該方法は、吸気事象の開始および次の吸気事象の開始の発生を正確に知ることに依存する。言い換えれば、漏出計算は、既知の呼吸とそれに続く呼吸に適用された平均として演算される。
【0008】
この方法は、前回の呼吸の開始と終了の瞬間が不明である場合、使用され得ない。概して、呼吸開始の時間を的確に計算することは困難であり得る。これは、特に、漏出の急な変化の直後の場合である。
【0009】
さらに、無呼吸の継続中には、計算を行うための呼吸の開始も終了もないため、該方法は、呼吸の努力を行わず、瞬間的にも全く換気されない対象の場合、例えば無呼吸中、には機能しない。
【0010】
米国特許第6,152,129号(Berthon−Jones)において、漏出は、長期オリフィス流量からの漏出経路のコンダクタンスを最初に推定することにより、判定され、
【数1】

となり、GL=1/RLは、コンダクタンス(Lは漏出を示す)であり、Qは、瞬間流量であり、pは、瞬間圧力であり、<>は、例えば、IIFを有するローパスフィルタリング、または長い時定数を有する他のフィルタにより計算された、長期平均を示す。本明細書で使用されるように、「平均」という用語は、ローパスフィルタリングステップの結果を含んだ一般的な意味を含み、算術平均またはRMS平均等の他の標準的平均に限定されないことに留意する。
【0011】
次いで、オリフィスを経た流量のモデルに基づく瞬間漏出流量は、
【数2】
となる。次いで、瞬間呼吸気流量は、QR=Q―QLとなることに留意する。
【0012】
Berthon−Jonesは、ファジー理論を使用して、フィルタ時定数を動的に調整し、漏出が安定していることが確実である場合、時定数を延長し、漏出が急に変化したことが確実である場合は、時定数を減少させ、漏出が安定していることが中間的に確実である場合、中間的に長いまたは短い時定数を使用することにより、瞬間漏出流量の急な変化に対処しようと試みている。
【0013】
また、Berthon−Jonesは、漏出のコンダクタンスの大きい、かつ急に増加する場合に対処するために、ファジー理論によって妨害指数を開発したが、この場合、計算された呼吸気流量は不正確となる。特に、明らかな吸気の間では、計算された呼吸気流量は、通常の吸気の予期された継続時間と比較して長い時間、大きな正である。逆に、漏出のコンダクタンスの急な減少がある場合、明らかな呼気の間では、計算された呼吸気流量は、通常の呼気の継続時間と比較して長い時間、大きな負である。
【0014】
したがって、空気流量が、ゼロから離れて大きくなり、かつより大量であるほど、指数がより大きくなるように、妨害指数、すなわち、漏出が急に変化した確実度の指数が導き出される。ファジー理論による妨害指数の明示的な計算は、米国特許第6,152,129号に記載され、参照することにより本明細書に組み込まれる。
【0015】
次いで、ローパスフィルタに対する時定数は、妨害指数とは逆に変化するように調整される。操作において、漏出の急な、かつ大きい変化がある場合、指数は大きくなり、漏出のコンダクタンスの計算に対する時定数は、小さくなり、漏れコンダクタンスが新しい値に急収束することを可能にする。逆に、漏出が長時間安定している場合、指数は小さくなり、漏れコンダクタンスの計算に対する時定数は、大きくなり、瞬間呼吸気流量の正確な計算を可能にする。計算された瞬間呼吸気流量が、より大きく、かつより長い期間である、中間の状況のスペクトルにおいて、指数は、次第に大きくなり、漏出の計算に対する時定数は、次第に減少する。例えば、漏出が実際に一定であり、対象が、単に大きなため息を開始しただけであるかどうか、または実際に、漏出が急に増加しているかどうか不確実である瞬間において、指数は、中間値となり、漏出のインピーダンスの計算に対する時定数もまた、中間値となる。
【発明の概要】
【課題を解決するための手段】
【0016】
本発明は、漏出源を詳細にモデリングすることなく、かつ漏出が発生する、呼吸サイクルにおける正確な位相を判定する必要性なく、CPAPシステムにおける瞬間漏出を迅速に判定する。代わりに、本発明は、呼吸サイクルを画定するためのタイマーの使用、および瞬間流量が、全呼吸を含むに十分長い時間にわたる流量と比較されることを確実にするための計算に頼る。本発明は、全位相サイクルを含むように遡って調べることにより、これを行う。これは、複数の呼吸にわたり長期平均を取る必要性、または呼吸の開始および終了を認識したモデルを有する必要性を回避する。
【0017】
漏出の急な変化は認識され、漏出が急速に変化している程度を妨害指数値として表わし、次いで、漏出の推定を構成する構成要素の寄与を調整するための、サーボベンチレータの場合には、サーボベンチレータ制御装置の出力パラメータ、典型的には圧力補助レベルの調整を一時的に減速または一時停止するための、パラメータとして使用される。
【図面の簡単な説明】
【0018】
【図1a】呼気時約4cm H2Oと吸気時12cm H2Oとの間の二相性CPAP(持続的陽性気道圧)治療において、測定されたマスク圧力の記録を示す。
【図1b】マスク圧力と同期した実際の呼吸気流量の記録を示す。
【図1c】21秒で、マスク漏出が発生し、治療圧力の関数である漏出からの漏れ流量をもたらすことを示す。
【図1d】測定されたマスク流量が漏出流量による相殺を含むことを示す。
【図1e】複数の呼吸にわたり、計算された漏出流量を判定するための図である。
【図1f】測定された流量−計算漏出流量として得られる計算された呼吸流量を示す。
【発明を実施するための形態】
【0019】
本発明は、実際の漏出パラメータが安定している場合に非常に安定するが、実際の漏出パラメータが急速に変化している場合、次第にかつゆっくりと、より不安定で、より不正確であるが、より早く反応する推定値に変化する漏出モデルパラメータの、継続的に更新された推定値を得ようとする願望が動機となっている。該漏出モデルパラメータは、典型的にオリフィス定数(漏出コンダクタンスと同等)であるが、そうである必要はない。
【0020】
漏出コンダクタンスの継続的に更新された推定値(特に、各呼吸の間に継続的に更新される)は、一次ローパスフィルタまたは移動平均フィルタ等の、典型的に固定されたウィンドウの長さを有する、何らかのローパスフィルタリング操作を、非換気流(呼吸流量および瞬間漏出流量の合計に等しい)、およびマスク圧力の平方根に対して行うことにより計算することができ、Berthon−Jonesにあるような漏出コンダクタンスの推定値G1を得る。この方法は、呼吸位相(進行中の呼吸内の位置)の判定と無関係であるという点で、他のいくつかの方法よりも優れた利点を有する。したがって、漏出の急な変化が発生し得て、呼吸流量の推定値、ひいては呼吸位相推定値に、著しい誤差を生じさせてもなお、漏出パラメータの推定値の更新を継続する。そのような呼吸と無関係の推定値の不利点は、特定の偶発事象が起こらない限り、推定値が、一呼吸内で安定しないことである。例えば、偶然に、ウィンドウ平均化フィルタの継続時間が、正確にN呼吸、Nは正数値である、を含む場合である。この不安定性の具体的事例は、マスク流量およびマスク圧力の一次ローパスフィルタ推定値が使用される場合を考慮することにより、説明される。単純化のために、マスク圧力は一定であり、実際の漏出コンダクタンスはゼロであると仮定する。次いで、漏出流量の推定値は、単に一次ローパスフィルタリングされた形の呼吸流量である。この推定値は、呼吸流量が、漏出流量の推定値を超える場合はいつでも増加し、呼吸流量が、漏出流量の推定値を下回る場合は減少する。特に、妥当なフィルタ時定数により、漏出流量の推定値は、吸気の大部分の間増加し、吸気の大部分の間減少し、呼気の中断の間ゆっくりと増加し、通常の状況下で、呼気の中断の間は決定的にゼロ以下となる。実際の呼吸流量が、呼気の中断の間はゼロであるため、マスク流量(仮定より、呼吸流量に等しい)と推定された漏出流量との差である、推定された呼吸流量は、呼気の中断の間正であり、例えば、
【数3】
に等しい。推定された呼吸流量が、ある実際の呼吸流量の閾値
【数4】
を超える場合に、人工呼吸器が、吸気をトリガーするように設計されている場合、この種類の漏出の推定値を使用する人工呼吸器は、望ましい実際の呼吸流量においてトリガーするために、そのトリガー閾値を、より高い値
【数5】
に設定しなければならない。残念ながら、
【数6】
は、リアルタイムで判定することが不可能とは言えないまでも困難である、呼吸流形態、呼吸速度、およびローパスフィルタ時定数の関数である。したがって、可変閾値においてトリガリングが実際に起こり、最悪の場合、自動トリガー(実際の呼吸流量がゼロにおけるトリガリング)が、起こり得る。留意すべきは、誤った呼吸流量をもたらす漏出パラメータの非定常推定値の影響は、呼吸の間中、かつ識別可能な呼気の中断があるかどうかにかかわらず存在し、循環(呼気トリガリング)および(吸気)トリガリング、ならびに推定された呼吸流量に作用する他のアルゴリズムに、潜在的な悪影響を有するということである。
【0021】
「妨害」は、Berthon−Jonesに記載されるように、漏出が、まだ相殺されていない程度であり、通常、漏出の急速な変化に起因する。それは、本明細書では、ファジー理論的な数量とみなされる。
【0022】
漏出コンダクタンスの推定値G1は、上記のように計算される。フィルタ使用の時定数は、Berthon−Jonesに記載されるように、妨害が増加すると、好ましくは減少することに留意されたい。
【0023】
第2の漏出コンダクタンスの推定値G2は、呼吸周波数と比べてなお高い、アルゴリズムのサンプリング周波数または低周波数(例えば、10Hz)において、継続的に計算される。以下に記載される方法で、アルゴリズムは、進行中の呼吸位置を識別し、次いで、前回の呼吸における同一の位置に関連する時間を見つけようと試みる。そのような位置を見つけられない場合、アルゴリズムは、代わりに、過去の10秒の時間を使用する。過去と現時点の時間の間に、ウィンドウが設定される。次いで、典型的には、G1の判定に使用されるローパスフィルタ値である、ローパスフィルタリングされたマスク流量、およびローパスフィルタリングされたマスク圧力の平方根(一次LPF等の、呼吸非依存性方法によりフィルタリングされる)は、このウィンドウにわたり平均化されることにより、さらにローパスフィルタリングされる。これらのウィンドウ平均値の比は、漏出コンダクタンスの推定値G2であり、安定した漏出の条件下で、非常に安定している。
【0024】
G2は、漏出コンダクタンスの変化に多少ゆっくりと反応するため、漏出が急速に変化している場合の使用は、不適当である。したがって、妨害がある限り、G2よりもG1が使用される。好ましい実施において、Jが妨害である場合([0,1]の数量)、
【数7】
で与えられる、コンダクタンスの推定値GJが使用される。
【0025】
次いで、瞬間漏出が、
【数8】
により容易に計算される。
【0026】
G2に対する平均化ウィンドウの開始位置の判定
目的は、患者の進行中の呼吸と同一の、前回の呼吸における位置を判定することである。このために、人は、吸気および呼気等の小さい組の分類の1つだけではなく、吸気の開始から呼気の終了まで、潜在的には有限の小さな数の急上昇を有して、次第に増加する、概念的に実数値(実際には、有理数)の変数でもある、呼吸位相の概念を必要とする。そのような概念は、Berthon−Jones Cheyne−Stokesの特許第WO98/012965号に提供され、参照することにより本明細書に組み込まれる。そこで、呼吸位相は、吸気の開始時に0、呼気の開始時に0.5に画定され、および呼気の終了時に1に近づく。そのような呼吸位相を仮定すると、人は、現時点における呼吸位相を見つけ、次いで、前回の呼吸における同一の呼吸位相を見つけるために、時間を遡り調査する。Berthon−Jonesにより記載されるシステムにより推定されるような呼吸位相が、典型的には、呼吸中に増加するが、必ずしも呼吸中に増加しないため(それが必ず減少する、呼気から吸気への移行を無視して)、現時点の値と同一の呼吸位相を有する、同一の呼吸における時点が、前回の呼吸にあると識別されないように、時間を遡り調査するアルゴリズムを有する必要がある。そのような探索アルゴリズムは、以下に記載される。このアルゴリズムは、例外的な状況下で失敗する可能性があるが、ほとんどの場合かなり強固である。位相におけるジャンプ(jumps)のため、現時点に関連する位相に等しい位相を有する前回の呼吸における時点が存在しない場合があり、この場合には、現時点における位相以下の位相を有する前回の呼吸における、最後の時間が代わりに使用される。
【0027】
一方で、トリガリングおよび循環に対する従来の流量閾値を使用するシステムは、進行中の呼吸における位置と同一の、前回の呼吸における位置を見出す目的で、呼吸位相を判定するためのファジー理論システムを使用する必要はない。吸気中に、現時点から吸気の終了までの最大時間が既知であると仮定して(典型的に、吸気の開始時に判定されるが、必ずしもそうではない)、各サンプリング間隔における呼吸位相は、その量に等しい増加量により、位相が、吸気の終了時に0.5に達するような量で増加する。例えば、1.6秒の最大吸気時間が、吸気開始時に判定された、簡単な場合において、位相は、0.5/1.6位相単位/秒の安定した速度で増加し得る。例えば呼吸流量が、循環閾値以下に落ちたことにより、循環(呼気への移行)がより早く起こった場合、位相は、その時点で0.5に急上昇し得る。同様の考察が、呼気中に当てはまり、位相の増加率は、1と最大呼気時間までの残りの時間で除算される現時点の位相の差である。この方法で判定される呼吸位相が、典型的に、進行中の呼吸における位置と同一の、前回の呼吸における位置を判定する目的のみに使用されるため、「ブックキーピング」位相と呼ばれる。
【0028】
Berthon−Jonesの方法であろうと、上記のような「ブックキーピング」位相であろうと、または他の特定の方法であろうと、使用される位相判定方法にかかわらず、現時点における位相以下の位相を有する、前回の呼吸における最後の時間を見つけるための、時間を遡る調査は、以下のように行われる(「ブックキーピング」位相に対しては、より単純な方法が利用可能であることが、十分理解されるが)。
【0029】
現時点の位相、例えば、φ0から始まり、本発明は、間隔[φ0−0.75、φ0−0.25]における最新の位相を、時間を遡り求める。目的は、現時点の前の呼吸の少なくとも0.25の時点を求めることである。そのような位相が見つかった場合、本発明は、φ1=φ0−0.25を計算し、間隔[φ1−0.75、φ1−0.25]における位相を、時間を遡り求める。これは、一度に0.25、すなわち、φI+1=φi−.025で継続する。[φ3−.075、φ3−0.25]において位相が見つかった場合、これは、単に[φ0−0.5、φ0]であるため、反復は中止される。位相が継続的に変化した場合、これは、正確にφ0であることが分かっているであろうが、実際には、φ0−εを得る可能性が最も高く、εは小さいことが望ましい。この方法で進めていくことにより、我々は、現時点の前の4位相の象限における位相を見つけたことから、位相が、進むというよりも戻ったという、ある程度の自信を有する。このアルゴリズムは、連続した0.5の2つの位相移行を逆移動とみなすが、実際の方向は、もちろん実際の中間である。このアルゴリズムが、この条件を満たす現時点と現時点の前の時間との間の時点が見つからない場合には、我々は、10秒等の、現時点の前の特定の妥当な最大時間となるように、平均化ウィンドウを取る。実施の詳細として、コンピュータの必要条件を減少させるために、漏出流量値は、最後の0.1秒にわたり平均化し、関連した呼吸位相に付随するバッファに記憶してもよく、最後の呼吸の検索が、100ポイントのバッファにおいて実行され、0.1秒毎に行われるようにする。次いで、瞬間漏出計算周波数、例えば、100Hzにおける、平均化された漏出の推定値は、最新の平均化された漏出コンダクタンスの推定値と、その直前の平均化されたコンダクタンス漏出の推定値との線形補間により、計算され得る。
【0030】
サーボベンチレータ、または換気補助を調整するために、何らかの換気量(呼吸流量の絶対値の半分、または全肺胞換気量、または最大流量、または吸気もしくは呼気中に判定される流量の特定の加重平均等)を使用する他のシステムにおいて、妨害が認められると、システムは、圧力補助の変化を減速または一時停止する。これは、呼吸流量の推定値が、妨害の存在下で確実ではなく、呼吸流量に基づく様々な換気量が、換気量を多く推定する可能性が高く、例えば、サーボベンチレータにおいては、換気量が、標的換気量を上回ると考えられるため、換気補助を不当に中断する。呼吸補助の調整の減速の程度は、好ましくは、妨害の増加関数である。例えば、前回からの、計算された呼吸補助の変化が、特定の値
【数9】
である場合、調整された補助の変化は、
【数10】
となり得て、例えば、kは、J≦0.1に対して1であり、J≧0.3に対して0であり、Jの中間値に対しては、線形補間された値を取る。
【技術分野】
【0001】
本発明は、無呼吸および他の呼吸器疾患の治療に関する。特に、本発明は、陽性気道圧に機械的を適用する場合の、漏れ空気量および実際の呼吸気流量の判定のための、方法および器具に関する。
【背景技術】
【0002】
無呼吸および他の呼吸器疾患の治療に対して、例えば、マスクを介して、吸気中にはより高く、呼気中にはより低くなり得る圧力で、呼吸可能なガスが、機械的呼吸器または人工呼吸器から供給される。(本明細書において、「マスク」へのいかなる言及も、鼻マスク、鼻/口マスク、鼻カニューレ/枕、および気管内または気管切開チューブを含む、個人の気道に呼吸可能なガスを送るための、すべての形態の装置を含むと理解されるものとする。「換気」という用語は、呼吸作業の一部を行う、全ての装置を説明するために使用される。)典型的に、治療の妥当性を評価するために、または人工呼吸器の操作を制御するために、機械的換気中に対象の呼吸気流量を測定する。
【0003】
呼吸気流量は、一般的に、マスクと圧力源との間のガス送達経路内に設置される、呼吸気流計で測定される。マスクと対象との間の漏出は、不可避である。呼吸気流計は、呼吸気流量+漏出を経た流量+通気口を経た流量(「意図的漏出」とも呼ばれる)の合計を測定する。漏出を経た瞬間流量が、既知である場合、呼吸気流量は、呼吸計における流量から、漏出を経た流量および通気口を経た流量を減算することにより計算され得る。典型的に、通気口を経た流量は、通気口における圧力の既知の関数であり、通気口における圧力が、妥当な正確さで推定され得ると仮定すると、通気口を経た流量は、容易に計算され得る。一方で、通気口の特徴が、用いられる漏出モデルに好適である場合、換気流および非意図的漏出は、ともにまとめられ、単一数量として推定され得る。通気口における圧力を使用した、換気流の直接推定は以下に仮定され、人工呼吸器の全流出量からのこの換気流の減算は、明確に言及されない場合には、行われたと仮定される。
【0004】
漏出を経た流量を修正するためのいくつかの方法では、(i)漏出が、略一定であり、(ii)十分長い時間にわたり、吸気および呼気の流量が、相殺されることを仮定する。これらの仮定が満たされる場合、十分長い時間にわたる呼吸計を経た平均流量は、漏出の規模と等しくなり、次いで、実際の呼吸気流量は、記載されるように計算され得る。
【0005】
既知の方法は、マスクにおける圧力が一定である場合のみ的確である。一方で、マスク圧力が時間とともに変化する場合(例えば、人工呼吸器の場合)、上記の仮定(i)は妥当ではなく、したがって、計算された呼吸気流量は、不正確である。これは、図1a〜図1fに顕著に示される。
【0006】
図1aは、呼気時約4cm H2Oと吸気時12cm H2Oとの間の二相性CPAP(持続的陽性気道圧)治療において、測定されたマスク圧力の記録を示す。図1bは、マスク圧力と同期した実際の呼吸気流量の記録を示す。図1cに示されるように、21秒の時間で、マスク漏出が発生し、治療圧力の関数である漏出からの漏れ流量をもたらす。ここで、図1dに示される測定されたマスク流量は、漏出流量による相殺を含む。次いで、従来技術の方法では、図1eに示されるように、複数の呼吸にわたり、計算された漏出流量を判定する。測定された流量−計算漏出流量として得られる計算された呼吸流量は、図1fに示され、正確な平均値に戻っているが、尺度が不正確なために計測されており、正および負のピーク空気流量の誤った表示を与える。
【0007】
別の従来技術の処理は、欧州公開第0 714 670 A2号に開示され、圧力依存性の漏出構成要素の計算を含む。該方法は、吸気事象の開始および次の吸気事象の開始の発生を正確に知ることに依存する。言い換えれば、漏出計算は、既知の呼吸とそれに続く呼吸に適用された平均として演算される。
【0008】
この方法は、前回の呼吸の開始と終了の瞬間が不明である場合、使用され得ない。概して、呼吸開始の時間を的確に計算することは困難であり得る。これは、特に、漏出の急な変化の直後の場合である。
【0009】
さらに、無呼吸の継続中には、計算を行うための呼吸の開始も終了もないため、該方法は、呼吸の努力を行わず、瞬間的にも全く換気されない対象の場合、例えば無呼吸中、には機能しない。
【0010】
米国特許第6,152,129号(Berthon−Jones)において、漏出は、長期オリフィス流量からの漏出経路のコンダクタンスを最初に推定することにより、判定され、
【数1】
となり、GL=1/RLは、コンダクタンス(Lは漏出を示す)であり、Qは、瞬間流量であり、pは、瞬間圧力であり、<>は、例えば、IIFを有するローパスフィルタリング、または長い時定数を有する他のフィルタにより計算された、長期平均を示す。本明細書で使用されるように、「平均」という用語は、ローパスフィルタリングステップの結果を含んだ一般的な意味を含み、算術平均またはRMS平均等の他の標準的平均に限定されないことに留意する。
【0011】
次いで、オリフィスを経た流量のモデルに基づく瞬間漏出流量は、
【数2】
となる。次いで、瞬間呼吸気流量は、QR=Q―QLとなることに留意する。
【0012】
Berthon−Jonesは、ファジー理論を使用して、フィルタ時定数を動的に調整し、漏出が安定していることが確実である場合、時定数を延長し、漏出が急に変化したことが確実である場合は、時定数を減少させ、漏出が安定していることが中間的に確実である場合、中間的に長いまたは短い時定数を使用することにより、瞬間漏出流量の急な変化に対処しようと試みている。
【0013】
また、Berthon−Jonesは、漏出のコンダクタンスの大きい、かつ急に増加する場合に対処するために、ファジー理論によって妨害指数を開発したが、この場合、計算された呼吸気流量は不正確となる。特に、明らかな吸気の間では、計算された呼吸気流量は、通常の吸気の予期された継続時間と比較して長い時間、大きな正である。逆に、漏出のコンダクタンスの急な減少がある場合、明らかな呼気の間では、計算された呼吸気流量は、通常の呼気の継続時間と比較して長い時間、大きな負である。
【0014】
したがって、空気流量が、ゼロから離れて大きくなり、かつより大量であるほど、指数がより大きくなるように、妨害指数、すなわち、漏出が急に変化した確実度の指数が導き出される。ファジー理論による妨害指数の明示的な計算は、米国特許第6,152,129号に記載され、参照することにより本明細書に組み込まれる。
【0015】
次いで、ローパスフィルタに対する時定数は、妨害指数とは逆に変化するように調整される。操作において、漏出の急な、かつ大きい変化がある場合、指数は大きくなり、漏出のコンダクタンスの計算に対する時定数は、小さくなり、漏れコンダクタンスが新しい値に急収束することを可能にする。逆に、漏出が長時間安定している場合、指数は小さくなり、漏れコンダクタンスの計算に対する時定数は、大きくなり、瞬間呼吸気流量の正確な計算を可能にする。計算された瞬間呼吸気流量が、より大きく、かつより長い期間である、中間の状況のスペクトルにおいて、指数は、次第に大きくなり、漏出の計算に対する時定数は、次第に減少する。例えば、漏出が実際に一定であり、対象が、単に大きなため息を開始しただけであるかどうか、または実際に、漏出が急に増加しているかどうか不確実である瞬間において、指数は、中間値となり、漏出のインピーダンスの計算に対する時定数もまた、中間値となる。
【発明の概要】
【課題を解決するための手段】
【0016】
本発明は、漏出源を詳細にモデリングすることなく、かつ漏出が発生する、呼吸サイクルにおける正確な位相を判定する必要性なく、CPAPシステムにおける瞬間漏出を迅速に判定する。代わりに、本発明は、呼吸サイクルを画定するためのタイマーの使用、および瞬間流量が、全呼吸を含むに十分長い時間にわたる流量と比較されることを確実にするための計算に頼る。本発明は、全位相サイクルを含むように遡って調べることにより、これを行う。これは、複数の呼吸にわたり長期平均を取る必要性、または呼吸の開始および終了を認識したモデルを有する必要性を回避する。
【0017】
漏出の急な変化は認識され、漏出が急速に変化している程度を妨害指数値として表わし、次いで、漏出の推定を構成する構成要素の寄与を調整するための、サーボベンチレータの場合には、サーボベンチレータ制御装置の出力パラメータ、典型的には圧力補助レベルの調整を一時的に減速または一時停止するための、パラメータとして使用される。
【図面の簡単な説明】
【0018】
【図1a】呼気時約4cm H2Oと吸気時12cm H2Oとの間の二相性CPAP(持続的陽性気道圧)治療において、測定されたマスク圧力の記録を示す。
【図1b】マスク圧力と同期した実際の呼吸気流量の記録を示す。
【図1c】21秒で、マスク漏出が発生し、治療圧力の関数である漏出からの漏れ流量をもたらすことを示す。
【図1d】測定されたマスク流量が漏出流量による相殺を含むことを示す。
【図1e】複数の呼吸にわたり、計算された漏出流量を判定するための図である。
【図1f】測定された流量−計算漏出流量として得られる計算された呼吸流量を示す。
【発明を実施するための形態】
【0019】
本発明は、実際の漏出パラメータが安定している場合に非常に安定するが、実際の漏出パラメータが急速に変化している場合、次第にかつゆっくりと、より不安定で、より不正確であるが、より早く反応する推定値に変化する漏出モデルパラメータの、継続的に更新された推定値を得ようとする願望が動機となっている。該漏出モデルパラメータは、典型的にオリフィス定数(漏出コンダクタンスと同等)であるが、そうである必要はない。
【0020】
漏出コンダクタンスの継続的に更新された推定値(特に、各呼吸の間に継続的に更新される)は、一次ローパスフィルタまたは移動平均フィルタ等の、典型的に固定されたウィンドウの長さを有する、何らかのローパスフィルタリング操作を、非換気流(呼吸流量および瞬間漏出流量の合計に等しい)、およびマスク圧力の平方根に対して行うことにより計算することができ、Berthon−Jonesにあるような漏出コンダクタンスの推定値G1を得る。この方法は、呼吸位相(進行中の呼吸内の位置)の判定と無関係であるという点で、他のいくつかの方法よりも優れた利点を有する。したがって、漏出の急な変化が発生し得て、呼吸流量の推定値、ひいては呼吸位相推定値に、著しい誤差を生じさせてもなお、漏出パラメータの推定値の更新を継続する。そのような呼吸と無関係の推定値の不利点は、特定の偶発事象が起こらない限り、推定値が、一呼吸内で安定しないことである。例えば、偶然に、ウィンドウ平均化フィルタの継続時間が、正確にN呼吸、Nは正数値である、を含む場合である。この不安定性の具体的事例は、マスク流量およびマスク圧力の一次ローパスフィルタ推定値が使用される場合を考慮することにより、説明される。単純化のために、マスク圧力は一定であり、実際の漏出コンダクタンスはゼロであると仮定する。次いで、漏出流量の推定値は、単に一次ローパスフィルタリングされた形の呼吸流量である。この推定値は、呼吸流量が、漏出流量の推定値を超える場合はいつでも増加し、呼吸流量が、漏出流量の推定値を下回る場合は減少する。特に、妥当なフィルタ時定数により、漏出流量の推定値は、吸気の大部分の間増加し、吸気の大部分の間減少し、呼気の中断の間ゆっくりと増加し、通常の状況下で、呼気の中断の間は決定的にゼロ以下となる。実際の呼吸流量が、呼気の中断の間はゼロであるため、マスク流量(仮定より、呼吸流量に等しい)と推定された漏出流量との差である、推定された呼吸流量は、呼気の中断の間正であり、例えば、
【数3】
に等しい。推定された呼吸流量が、ある実際の呼吸流量の閾値
【数4】
を超える場合に、人工呼吸器が、吸気をトリガーするように設計されている場合、この種類の漏出の推定値を使用する人工呼吸器は、望ましい実際の呼吸流量においてトリガーするために、そのトリガー閾値を、より高い値
【数5】
に設定しなければならない。残念ながら、
【数6】
は、リアルタイムで判定することが不可能とは言えないまでも困難である、呼吸流形態、呼吸速度、およびローパスフィルタ時定数の関数である。したがって、可変閾値においてトリガリングが実際に起こり、最悪の場合、自動トリガー(実際の呼吸流量がゼロにおけるトリガリング)が、起こり得る。留意すべきは、誤った呼吸流量をもたらす漏出パラメータの非定常推定値の影響は、呼吸の間中、かつ識別可能な呼気の中断があるかどうかにかかわらず存在し、循環(呼気トリガリング)および(吸気)トリガリング、ならびに推定された呼吸流量に作用する他のアルゴリズムに、潜在的な悪影響を有するということである。
【0021】
「妨害」は、Berthon−Jonesに記載されるように、漏出が、まだ相殺されていない程度であり、通常、漏出の急速な変化に起因する。それは、本明細書では、ファジー理論的な数量とみなされる。
【0022】
漏出コンダクタンスの推定値G1は、上記のように計算される。フィルタ使用の時定数は、Berthon−Jonesに記載されるように、妨害が増加すると、好ましくは減少することに留意されたい。
【0023】
第2の漏出コンダクタンスの推定値G2は、呼吸周波数と比べてなお高い、アルゴリズムのサンプリング周波数または低周波数(例えば、10Hz)において、継続的に計算される。以下に記載される方法で、アルゴリズムは、進行中の呼吸位置を識別し、次いで、前回の呼吸における同一の位置に関連する時間を見つけようと試みる。そのような位置を見つけられない場合、アルゴリズムは、代わりに、過去の10秒の時間を使用する。過去と現時点の時間の間に、ウィンドウが設定される。次いで、典型的には、G1の判定に使用されるローパスフィルタ値である、ローパスフィルタリングされたマスク流量、およびローパスフィルタリングされたマスク圧力の平方根(一次LPF等の、呼吸非依存性方法によりフィルタリングされる)は、このウィンドウにわたり平均化されることにより、さらにローパスフィルタリングされる。これらのウィンドウ平均値の比は、漏出コンダクタンスの推定値G2であり、安定した漏出の条件下で、非常に安定している。
【0024】
G2は、漏出コンダクタンスの変化に多少ゆっくりと反応するため、漏出が急速に変化している場合の使用は、不適当である。したがって、妨害がある限り、G2よりもG1が使用される。好ましい実施において、Jが妨害である場合([0,1]の数量)、
【数7】
で与えられる、コンダクタンスの推定値GJが使用される。
【0025】
次いで、瞬間漏出が、
【数8】
により容易に計算される。
【0026】
G2に対する平均化ウィンドウの開始位置の判定
目的は、患者の進行中の呼吸と同一の、前回の呼吸における位置を判定することである。このために、人は、吸気および呼気等の小さい組の分類の1つだけではなく、吸気の開始から呼気の終了まで、潜在的には有限の小さな数の急上昇を有して、次第に増加する、概念的に実数値(実際には、有理数)の変数でもある、呼吸位相の概念を必要とする。そのような概念は、Berthon−Jones Cheyne−Stokesの特許第WO98/012965号に提供され、参照することにより本明細書に組み込まれる。そこで、呼吸位相は、吸気の開始時に0、呼気の開始時に0.5に画定され、および呼気の終了時に1に近づく。そのような呼吸位相を仮定すると、人は、現時点における呼吸位相を見つけ、次いで、前回の呼吸における同一の呼吸位相を見つけるために、時間を遡り調査する。Berthon−Jonesにより記載されるシステムにより推定されるような呼吸位相が、典型的には、呼吸中に増加するが、必ずしも呼吸中に増加しないため(それが必ず減少する、呼気から吸気への移行を無視して)、現時点の値と同一の呼吸位相を有する、同一の呼吸における時点が、前回の呼吸にあると識別されないように、時間を遡り調査するアルゴリズムを有する必要がある。そのような探索アルゴリズムは、以下に記載される。このアルゴリズムは、例外的な状況下で失敗する可能性があるが、ほとんどの場合かなり強固である。位相におけるジャンプ(jumps)のため、現時点に関連する位相に等しい位相を有する前回の呼吸における時点が存在しない場合があり、この場合には、現時点における位相以下の位相を有する前回の呼吸における、最後の時間が代わりに使用される。
【0027】
一方で、トリガリングおよび循環に対する従来の流量閾値を使用するシステムは、進行中の呼吸における位置と同一の、前回の呼吸における位置を見出す目的で、呼吸位相を判定するためのファジー理論システムを使用する必要はない。吸気中に、現時点から吸気の終了までの最大時間が既知であると仮定して(典型的に、吸気の開始時に判定されるが、必ずしもそうではない)、各サンプリング間隔における呼吸位相は、その量に等しい増加量により、位相が、吸気の終了時に0.5に達するような量で増加する。例えば、1.6秒の最大吸気時間が、吸気開始時に判定された、簡単な場合において、位相は、0.5/1.6位相単位/秒の安定した速度で増加し得る。例えば呼吸流量が、循環閾値以下に落ちたことにより、循環(呼気への移行)がより早く起こった場合、位相は、その時点で0.5に急上昇し得る。同様の考察が、呼気中に当てはまり、位相の増加率は、1と最大呼気時間までの残りの時間で除算される現時点の位相の差である。この方法で判定される呼吸位相が、典型的に、進行中の呼吸における位置と同一の、前回の呼吸における位置を判定する目的のみに使用されるため、「ブックキーピング」位相と呼ばれる。
【0028】
Berthon−Jonesの方法であろうと、上記のような「ブックキーピング」位相であろうと、または他の特定の方法であろうと、使用される位相判定方法にかかわらず、現時点における位相以下の位相を有する、前回の呼吸における最後の時間を見つけるための、時間を遡る調査は、以下のように行われる(「ブックキーピング」位相に対しては、より単純な方法が利用可能であることが、十分理解されるが)。
【0029】
現時点の位相、例えば、φ0から始まり、本発明は、間隔[φ0−0.75、φ0−0.25]における最新の位相を、時間を遡り求める。目的は、現時点の前の呼吸の少なくとも0.25の時点を求めることである。そのような位相が見つかった場合、本発明は、φ1=φ0−0.25を計算し、間隔[φ1−0.75、φ1−0.25]における位相を、時間を遡り求める。これは、一度に0.25、すなわち、φI+1=φi−.025で継続する。[φ3−.075、φ3−0.25]において位相が見つかった場合、これは、単に[φ0−0.5、φ0]であるため、反復は中止される。位相が継続的に変化した場合、これは、正確にφ0であることが分かっているであろうが、実際には、φ0−εを得る可能性が最も高く、εは小さいことが望ましい。この方法で進めていくことにより、我々は、現時点の前の4位相の象限における位相を見つけたことから、位相が、進むというよりも戻ったという、ある程度の自信を有する。このアルゴリズムは、連続した0.5の2つの位相移行を逆移動とみなすが、実際の方向は、もちろん実際の中間である。このアルゴリズムが、この条件を満たす現時点と現時点の前の時間との間の時点が見つからない場合には、我々は、10秒等の、現時点の前の特定の妥当な最大時間となるように、平均化ウィンドウを取る。実施の詳細として、コンピュータの必要条件を減少させるために、漏出流量値は、最後の0.1秒にわたり平均化し、関連した呼吸位相に付随するバッファに記憶してもよく、最後の呼吸の検索が、100ポイントのバッファにおいて実行され、0.1秒毎に行われるようにする。次いで、瞬間漏出計算周波数、例えば、100Hzにおける、平均化された漏出の推定値は、最新の平均化された漏出コンダクタンスの推定値と、その直前の平均化されたコンダクタンス漏出の推定値との線形補間により、計算され得る。
【0030】
サーボベンチレータ、または換気補助を調整するために、何らかの換気量(呼吸流量の絶対値の半分、または全肺胞換気量、または最大流量、または吸気もしくは呼気中に判定される流量の特定の加重平均等)を使用する他のシステムにおいて、妨害が認められると、システムは、圧力補助の変化を減速または一時停止する。これは、呼吸流量の推定値が、妨害の存在下で確実ではなく、呼吸流量に基づく様々な換気量が、換気量を多く推定する可能性が高く、例えば、サーボベンチレータにおいては、換気量が、標的換気量を上回ると考えられるため、換気補助を不当に中断する。呼吸補助の調整の減速の程度は、好ましくは、妨害の増加関数である。例えば、前回からの、計算された呼吸補助の変化が、特定の値
【数9】
である場合、調整された補助の変化は、
【数10】
となり得て、例えば、kは、J≦0.1に対して1であり、J≧0.3に対して0であり、Jの中間値に対しては、線形補間された値を取る。
【特許請求の範囲】
【請求項1】
患者の呼吸装置におけるマスク漏出コンダクタンスを判定する方法であって、
漏出コンダクタンスの変化に比較的迅速に反応する、漏出コンダクタンスの第1の推定値を判定するステップと、
漏出コンダクタンスの変化によりゆっくりと反応する、漏出コンダクタンスの第2の推定値を判定するステップと、
漏出コンダクタンスの前記第1および第2の推定値の関数として、前記マスク漏出コンダクタンスを判定するステップと、
を含むことを特徴とする方法。
【請求項2】
前記マスク内の圧力を判定するステップをさらに含むことを特徴とする請求項1に記載の方法。
【請求項3】
前記マスク漏出コンダクタンスおよび前記マスク圧力の関数として、非意図的マスク漏出の推定値を判定するステップをさらに含むことを特徴とする請求項2に記載の方法。
【請求項4】
前記非意図的マスク漏出が、
【数1】
として計算され、式中、
Qleakは、非意図的マスク漏出であり、
Gjは、マスク漏出コンダクタンスであり、
Pmaskは、マスク圧力である、
ことを特徴とする請求項3に記載の方法。
【請求項5】
マスク漏出の非補正の程度を表す、非補正漏出指数を判定するためのステップをさらに含むことを特徴とする請求項1に記載の方法。
【請求項6】
前記マスク漏出コンダクタンスは、前記非補正漏出指数、ならびに漏出コンダクタンスの前記第1および第2の推定値の関数として計算されることを特徴とする請求項5に記載の方法。
【請求項7】
前記マスク漏出コンダクタンスは、
【数2】
として計算され、式中、
Gjは、マスク漏出コンダクタンスの推定値であり、
G1は、漏出コンダクタンスの前記第1の推定値であり、
G2は、漏出コンダクタンスの前記第2の推定値であり、
Jは、非補正マスク漏出の指数である、
ことを特徴とする請求項6に記載の方法。
【請求項8】
患者に換気補助を提供する方法であって、
非意図的漏出の非補正の程度を示す、指数を判定するステップと、
前記指数に従い、換気補助レベルを調整するステップと、
を含むことを特徴とする方法。
【請求項9】
前記換気補助レベルは、前記指数の関数である速度で調整されることを特徴とする請求項8に記載の方法。
【請求項10】
前記調整速度は、非補正非意図的漏出の増加とともに減少することを特徴とする請求項9に記載の方法。
【請求項1】
患者の呼吸装置におけるマスク漏出コンダクタンスを判定する方法であって、
漏出コンダクタンスの変化に比較的迅速に反応する、漏出コンダクタンスの第1の推定値を判定するステップと、
漏出コンダクタンスの変化によりゆっくりと反応する、漏出コンダクタンスの第2の推定値を判定するステップと、
漏出コンダクタンスの前記第1および第2の推定値の関数として、前記マスク漏出コンダクタンスを判定するステップと、
を含むことを特徴とする方法。
【請求項2】
前記マスク内の圧力を判定するステップをさらに含むことを特徴とする請求項1に記載の方法。
【請求項3】
前記マスク漏出コンダクタンスおよび前記マスク圧力の関数として、非意図的マスク漏出の推定値を判定するステップをさらに含むことを特徴とする請求項2に記載の方法。
【請求項4】
前記非意図的マスク漏出が、
【数1】
として計算され、式中、
Qleakは、非意図的マスク漏出であり、
Gjは、マスク漏出コンダクタンスであり、
Pmaskは、マスク圧力である、
ことを特徴とする請求項3に記載の方法。
【請求項5】
マスク漏出の非補正の程度を表す、非補正漏出指数を判定するためのステップをさらに含むことを特徴とする請求項1に記載の方法。
【請求項6】
前記マスク漏出コンダクタンスは、前記非補正漏出指数、ならびに漏出コンダクタンスの前記第1および第2の推定値の関数として計算されることを特徴とする請求項5に記載の方法。
【請求項7】
前記マスク漏出コンダクタンスは、
【数2】
として計算され、式中、
Gjは、マスク漏出コンダクタンスの推定値であり、
G1は、漏出コンダクタンスの前記第1の推定値であり、
G2は、漏出コンダクタンスの前記第2の推定値であり、
Jは、非補正マスク漏出の指数である、
ことを特徴とする請求項6に記載の方法。
【請求項8】
患者に換気補助を提供する方法であって、
非意図的漏出の非補正の程度を示す、指数を判定するステップと、
前記指数に従い、換気補助レベルを調整するステップと、
を含むことを特徴とする方法。
【請求項9】
前記換気補助レベルは、前記指数の関数である速度で調整されることを特徴とする請求項8に記載の方法。
【請求項10】
前記調整速度は、非補正非意図的漏出の増加とともに減少することを特徴とする請求項9に記載の方法。
【図1a】

【図1b】
【図1c】
【図1d】
【図1e】
【図1f】
【図1b】
【図1c】
【図1d】
【図1e】
【図1f】
【公開番号】特開2012−196505(P2012−196505A)
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−137024(P2012−137024)
【出願日】平成24年6月18日(2012.6.18)
【分割の表示】特願2009−525854(P2009−525854)の分割
【原出願日】平成19年8月30日(2007.8.30)
【出願人】(500046450)レスメド・リミテッド (192)
【氏名又は名称原語表記】RESMED LTD
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願番号】特願2012−137024(P2012−137024)
【出願日】平成24年6月18日(2012.6.18)
【分割の表示】特願2009−525854(P2009−525854)の分割
【原出願日】平成19年8月30日(2007.8.30)
【出願人】(500046450)レスメド・リミテッド (192)
【氏名又は名称原語表記】RESMED LTD
[ Back to top ]