
CT装置
【課題】被検体の着目部を簡便に回転軸上に合わせる。
【解決手段】テーブル4をxy方向に移動させるXY機構6と、z方向に移動させる昇降機構7と、ある回転位置でX線検出器3が検出した第一の透過像を表示する表示部9aと、表示部9aに表示された第一の透過像上で着目部の設定を受け付けるROI設定部9cにより第一の透過像上で着目部が設定されると、移動制御部9dによりXY機構6を制御してテーブル4を所定距離xy移動させてからあるいは昇降機構7を制御してテーブル4を所定距離z移動させてから第二の透過像をX線検出器3で検出させ、第一の透過像と第二の透過像とから着目部の透過像上の移動量を求め、求めた透過像上の移動量から着目部のxy面に沿った位置を求め、XY機構6を制御して着目部を回転軸RA上に合わせるようにテーブル4をxy移動させる。
【解決手段】テーブル4をxy方向に移動させるXY機構6と、z方向に移動させる昇降機構7と、ある回転位置でX線検出器3が検出した第一の透過像を表示する表示部9aと、表示部9aに表示された第一の透過像上で着目部の設定を受け付けるROI設定部9cにより第一の透過像上で着目部が設定されると、移動制御部9dによりXY機構6を制御してテーブル4を所定距離xy移動させてからあるいは昇降機構7を制御してテーブル4を所定距離z移動させてから第二の透過像をX線検出器3で検出させ、第一の透過像と第二の透過像とから着目部の透過像上の移動量を求め、求めた透過像上の移動量から着目部のxy面に沿った位置を求め、XY機構6を制御して着目部を回転軸RA上に合わせるようにテーブル4をxy移動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被検体の断面像を撮影するコンピュータ断層撮影装置(以下CT(Computed Tomography)装置と記載する。)に関する。
【背景技術】
【0002】
従来のCT装置で、所謂RR(Rotate Rotate)方式(第三世代方式)と呼ばれるCT装置は、放射線源から発生する放射線(X線)を被検体に向けて照射し、被検体を放射線の光軸の方向に対し交差する回転軸で放射線に対して相対的に回転させ、一回転中の所定回転位置ごとに被検体から透過してくる放射線を1次元あるいは2次元の複数検出チャンネルを有する放射線検出器で検出し、この検出器出力から被検体の断面像ないし3次元データを得る(断層撮影する)ものである。
【0003】
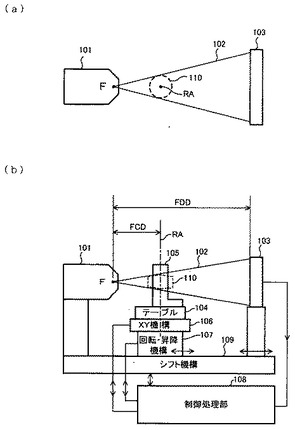
従来例として図8に、特許文献1に記載されているCT装置の構成を示す(図8(a)平面図、図8(b)正面図)。X線管101と、ここから発生するコーン状のX線ビーム102を2次元の分解能で検出するX線検出器103が対向して配置され、このX線ビーム102に入るようにテーブル104上に載置された被検体105の透過像(透過データ)を得るようになっている。
【0004】
テーブル104はXY機構106上に配置され、XY機構106は回転・昇降機構107上に配置されている。被検体105の断面像を撮影する場合は、テーブル104を回転軸RAに対し回転・昇降機構107により1回転させながら多数の方向について透過像を得る(スキャンと言う)。このスキャンにより得られた多数の透過像を制御処理部108で処理して被検体105の断面像(1枚ないし多数枚)を得る。
【0005】
ここで、XY機構106は、回転軸RAに対しテーブル104を回転軸RAと直交する面内で移動させ、被検体105の着目部が回転軸RA上になるように位置調整するために用いられる。
【0006】
さらに、回転軸RAおよびX線検出器103はシフト機構109によりX線管101に近づけあるいは遠ざけることができ、目的に応じて撮影倍率(=FDD/FCD)を変更できるようになっている。
【0007】
図8に示す断面像視野(あるいはスキャン領域と称する)110は、テーブル104が回転軸RAに対して1回転する間に、常にX線検出器103で検出されるX線ビーム102に包含される領域と定義される。断面像視野110は回転軸RAを軸とする略円筒状の領域であり、無理なく断面像を再構成できる領域である。
【0008】
ところで、撮影に先立ち、被検体105の着目部を断面像視野110に収める必要があるが、断面像視野110を直接目視できないため着目部の位置設定が難しい。そこで、特許文献1のCT装置では、撮影倍率を低く設定した状態で仮断層撮影を行って得た断面像を表示し、この断面像上で操作者が着目部をROI(Region of Interest)指定すると、このROI指定した部分の中央が回転軸上に来るように自動的にXY機構106を制御している。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2002−310943号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
従来技術では、被検体の着目部が回転軸上に来るように配置するとき、仮の断層撮影をおこない、仮の断面像を再構成していた。このため、操作者としては着目部をROI指定する前に、仮の断層撮影と仮の断面像の再構成の時間を待たされることになり、使用勝手として簡便ではなかった。
【0011】
本発明は上記事情に鑑みてなされたもので、被検体の着目部を簡便に回転軸上に合わせることができるCT装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するため、請求項1記載の本発明に係るCT装置は、テーブル上に載置された被検体に向けて放射線を放射する放射線源と、前記被検体を透過した放射線を検出して透過像として出力する放射線検出手段と、前記放射線と交差する回転軸に対し前記テーブルと前記放射線とを相対的に回転させる回転手段と、前記回転の多数の方向で検出された透過像から前記被検体の断面像を再構成する再構成手段を有するCT装置において、前記テーブルを前記回転軸及び前記放射線に対し前記回転軸と直交するxy面に沿って相対的にxy移動させるxy移動手段と、前記テーブルを前記放射線に対し前記回転軸と平行なz方向に相対的にz移動させるz移動手段と、1つの前記回転の位置で前記放射線検出手段が検出した第一の透過像を表示する表示手段と、前記表示手段に表示された前記第一の透過像上で着目部の設定を受け付ける受付手段と、前記受付手段により前記第一の透過像上で前記着目部が設定されると、前記xy移動手段を制御して前記テーブルを前記放射線を横切る方向へ所定距離相対的にxy移動させてからあるいは前記z移動手段を制御して前記テーブルを前記z方向へ所定距離相対的にz移動させてから第二の透過像を前記放射線検出手段で検出させ、前記第一の透過像と前記第二の透過像とから前記着目部の透過像上の移動量を求め、前記求めた透過像上の移動量から前記着目部の前記xy面に沿った位置を求め、前記xy移動手段を制御して前記着目部を前記回転軸上に合わせるように前記テーブルを相対的にxy移動させる移動制御手段とを有することを要旨とする。
【0013】
この構成により、第一透過像上で被検体の着目部を設定するのみで、テーブルを所定距離(S)移動させて撮影した第二透過像上の着目部の移動量(Δn)から着目部のxy面に沿った位置(x2,y2)を求めるので、着目部を簡便に回転軸上に合わせることができる。
【0014】
請求項2記載の本発明に係るCT装置は、請求項1に記載のCT装置において、前記移動制御手段は、さらに、求めた前記着目部の前記xy面に沿った位置を用いて、前記着目部が前記放射線の広がりの前記z方向の中央になるように、前記z移動手段を制御して前記テーブルを相対的にz移動させることを要旨とする。
【0015】
この構成により、第一透過像上で被検体の着目部を設定するのみで、着目部のxy面に沿った位置(y2)を用いて着目部のz方向の位置(z2)を求めるので、着目部を簡便にz方向中央に合わせることができる。
【0016】
請求項3記載の本発明に係るCT装置は、請求項1または請求項2に記載のCT装置において、前記放射線源と前記回転軸との距離である撮影距離を変更する撮影距離変更手段を有し、前記移動制御手段は、さらに、求めた前記着目部の前記xy面に沿った位置および設定された前記着目部の大きさとから、前記着目部の大きさが前記放射線の前記xy面に沿った広がりにあるいは前記放射線の前記z方向に沿った広がりにちょうど収まる前記撮影距離となるように、前記撮影距離変更手段を制御して前記撮影距離を変更することを要旨とする。
【0017】
この構成により、第一透過像上で被検体の着目部を設定するのみで、着目部のxy面に沿った位置(y2)と着目部の大きさ(NrまたはMr)とから、着目部の大きさがX線ビーム2のxy面に沿った広がりまたはz方向に沿った広がりにちょうど収まる撮影距離(FCD’またはFCD’’)に変更するので、着目部を簡便に断面像視野10の直径内または高さ内にちょうど収めるようにできる。
【0018】
請求項4記載の本発明に係るCT装置は、請求項1ないし請求項3のいずれか1項に記載のCT装置において、前記移動制御手段は、前記第一の透過像上で設定された着目部をずらして前記第二の透過像と比較し、一致度が高いずらし量を前記着目部の透過像上の移動量として求めることを要旨とする。
【0019】
この構成により、第一透過像上の着目部をずらして第二透過像と相関を取って一致度が高いずらし量を着目部の透過像上の移動量として求めるので、透過像上の模様16の移動量として着目部の移動量を正確に求めることができ、着目部を正確に回転軸上に合わせることができる。
【発明の効果】
【0020】
本発明によれば、被検体の着目部を簡便に回転軸上に合わせることができる。
【図面の簡単な説明】
【0021】
【図1】本発明の第一実施形態に係るCT装置の構成を示した模式図((a)平面図、(b)正面図)。
【図2】本発明の第一の実施形態に係る断層撮影に先立つ被検体の配置調整のフロー図。
【図3】第一の実施形態に係る第一の透過像を示す模式図。
【図4】第一の実施形態に係る第二の透過像を示す模式図。
【図5】第一の実施形態に係る着目部のxyz位置を求める幾何図((a)平面図、(b)正面図)。
【図6】第一の実施形態に係るxy方向とXY方向の関係を示す幾何図(平面図)。
【図7】本発明の第二実施形態に係るCT装置の構成を示した模式図(正面図)。
【図8】従来のCT装置の構成を示した模式図((a)平面図、(b)正面図)。
【発明を実施するための形態】
【0022】
以下、図面を参照して、本発明実施形態を説明する。
【0023】
(本発明の第一の実施の形態の構成)
以下、本発明の第一の実施形態の構成について図1を参照して説明する。
【0024】
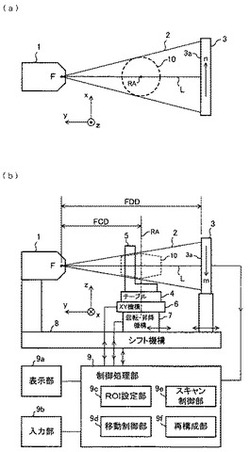
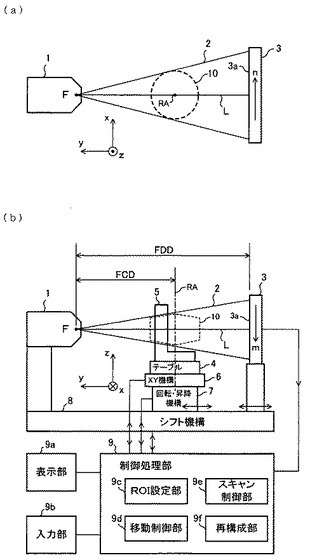
図1は本発明の第一実施形態に係るCT装置の構成を示した模式図(図1(a)平面図、図1(b)正面図)である。
【0025】
X線管(放射線源)1と、X線管1のX線焦点Fより放射されたX線の一部であるコーン状のX線ビーム(放射線)2を2次元の分解能で検出するX線検出器(放射線検出手段)3とが対向して配置され、このX線ビーム2に入るようにテーブル4上に載置された被検体5を透過したX線ビーム2がX線検出器3により検出され、透過像(透過データ)として出力される。
【0026】
テーブル4はXY機構(xy移動手段)6上に配置され、XY機構6は回転・昇降機構(回転手段、z移動手段)7上に配置されている。テーブル4は回転・昇降機構7によりX線ビーム2と交差する(X線ビーム2の光軸Lに対して垂直に交差し、実質的に垂直な方向であれば良い。)回転軸RAに対して回転されるとともに、回転軸RAと平行なz方向にz移動(昇降)される。XY機構6は、回転軸RAに対しテーブル4を回転軸RAと直交するxy面内で移動させる。
【0027】
さらに、シフト機構(撮影距離変更手段)8により回転軸RAおよびX線検出器3をX線管1に近づけあるいは遠ざけることができ、X線管1のX線焦点Fと回転軸RAとの間の撮影距離FCD(Focus to rotation Center Distance)と、X線焦点FとX線検出器3の検出面3aとの間の検出距離FDD(Focus to Detector Distance)を変えることができる。
【0028】
ここで、XY機構6は、被検体5の着目部が回転軸RA上になるように位置調整するために用いられ、シフト機構8は目的に応じて撮影倍率(=FDD/FCD)を変更するために用いられ、回転・昇降機構7のz移動は被検体5の着目部をX線ビーム2の高さに合わせるのに用いられる。また、回転・昇降機構7の回転は断面像を撮影する場合に被検体5をX線ビーム2に対し回転させて、多数の方向について透過像を得るために用いられる。
【0029】
図1に示す断面像視野(あるいはスキャン領域と称する)10は、テーブル4が回転軸RAに対して1回転する間に、常にX線検出器3で検出されるX線ビーム2に包含される領域と定義される。断面像視野10は回転軸RAを軸とする略円筒状の領域であり、無理なく断面像を再構成できる領域である。
【0030】
構成要素として、他に、各機構部(XY機構6、回転・昇降機構7、シフト機構8)を制御し、また、X線検出器3からの透過データを処理する制御処理部9、処理結果等を表示する表示部9a(表示手段)、X線管1を制御するX線制御部(図示せず)等がある。
【0031】
制御処理部9は通常のコンピュータで、CPU、メモリ、ディスク、表示部9a、入力部(キーボードやマウス等)9b、機構制御ボード、インターフェース、等より成っている。
【0032】
制御処理部9は、機構制御ボードにより、各機構部6,7,8の動作位置の信号(エンコーダパルス等)を受けて各機構部6,7,8を制御して被検体の位置合わせやスキャン(断層撮影走査)等を行わせる他、透過データの収集指令パルス等をX線検出器3に送る。なお、各機構部6,7,8には図示していないエンコーダが取付けられており、テーブル4のXY機構6による移動位置X,Y、回転・昇降機構7によるz移動位置zと回転角度φ、及びシフト機構8によるFCD,FDDが読み取られ、それぞれ制御処理部9に送られる。
【0033】
また、制御処理部9は、断層撮影時にX線検出器3からの透過データを収集し、記憶し、再構成処理して被検体の断面像を作成し、表示部9aに表示する。
【0034】
また、制御処理部9は、X線制御部(図示せず)に指令を出し、管電圧、管電流を指定すると共に、X線の放射、停止の指示を行なう。管電圧、管電流は被検体に合わせて変えることができる。
【0035】
図1に示すように、制御処理部9はソフトウェアを読み込んでCPUが機能する機能ブロックとして、透過像上で着目部の設定を受け付けるROI設定部(受付手段)9c、設定された着目部を回転軸RA上に移動する移動制御部(移動制御手段)9d、断層撮影をするためのスキャン制御部9e、透過データを用いて断面像を作成する再構成部(再構成手段)9f、等を備えている。
【0036】
(第一の実施の形態の作用)
本発明の第一の実施形態の作用について図2ないし図6を参照して説明する。
【0037】
図2は第一の実施形態に係る断層撮影に先立つ被検体の配置調整のフロー図である。
【0038】
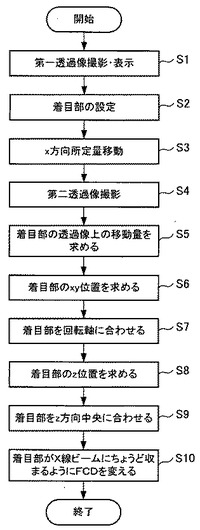
まず、断層撮影に先立ち、図2のフローに従って、以下に記載するように被検体5の着目部を断面像視野10の中央に収める。
【0039】
ステップS1で、操作者は被検体5をテーブル4に載置し、入力部9bからX線照射指令を入力すると、制御処理部9はX線検出器3の出力を取込み、被検体5の第一の透過像を制御処理部9の適宜な記憶部(図示せず)に記憶し、表示部9aに表示する。
【0040】
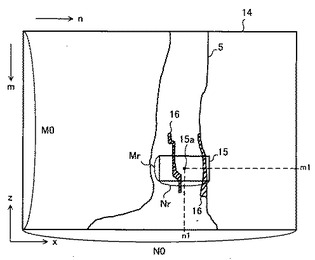
ステップS2で、第一の透過像上で着目部の設定を以下のように行う。図3は第一の実施形態に係る第一の透過像を示す模式図である。操作者は入力部9bから入力することで、第一の透過像14に重ねて矩形ROI(Region of Interest)15を表示させ、ROI15の大きさと位置を調整して着目部を設定する。このとき操作者は、第一の透過像14で特徴的な模様16を頼りに着目部を設定する。ROI設定部9cはこの入力を受け付けてROI15を設定して記憶する。ここで記憶するデータは、例えば、ROI15の位置、大きさに関するデータであり、制御処理部9の適宜な記憶部(図示せず)に記憶される。この設定したROI15が設定した着目部を表す。15aは着目部中心である。
【0041】
次に、移動制御部9dは以下に記載するようにステップS3ないしステップS10を実行して被検体5の着目部を断面像視野10の中央に収める。
【0042】
ステップS3で、移動制御部9dはXY機構6を制御してテーブル4をx方向に所定距離移動させる。ここでx方向は、xy面内でX線ビーム2を直角に横切る方向(X線ビーム2の光軸Lに対して直角となる方向で、実質的に直角であれば良い。)で、y方向はX線ビーム2に沿った方向(X線ビーム2の光軸Lに対して平行となる方向で、実質的に平行であれば良い。)で、x方向とy方向は互いに直交している。回転角度φが0°のとき、XY機構6の移動方向XとYはそれぞれx方向とy方向に一致しているので、x方向の移動はX移動のみで行われる。回転角度φが0°でないとき、XY機構6の移動方向XとYは方向xとyから回転しているのでx方向の移動はX移動とY移動を組み合わせて行うようにする。
【0043】
移動させるx方向の所定距離としては、撮影倍率(=FDD/FCD)が大きいほど小さな量を選ぶ。例えば、所定距離Sは式、
S=ΔN・dpn・FCD/FDD ………(1)
で計算する。ΔNは期待されるずれ画素数で、定数(例えば50)である。dpnは検出面3a上のx方向の1画素サイズで、定数である。
【0044】
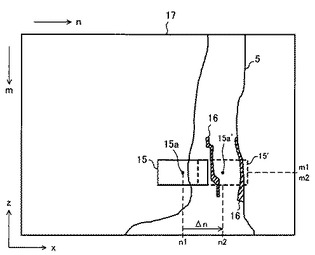
ステップS3でテーブル4をx方向に所定距離Sだけ移動させた後、ステップS4で、移動制御部9dは、X線を照射させX線検出器3の出力を取込み、被検体5の第二の透過像を制御処理部9の適宜な記憶部(図示せず)に記憶する。図4は第一の実施形態に係る第二の透過像を示す模式図である。第二の透過像17上では、第一の透過像14と比べて、被検体5はx方向に移動しており、透過像上の模様16を有する着目部もx方向に移動している。
【0045】
ステップS5で、着目部の透過像上の移動量を以下のように求める。第二透過像上でROI15を、形を保ったままx方向にΔn画素ずらし、ROI15’としたときのROI15’内の画像と、ステップS1で記憶した第一透過像のROI15内の画像との相関を取る。相関は、例えば、対応する画素間の画像値の差の絶対値をROI内の全画素数分加算して相関値を求め、ずらし量Δnを変えて行き、最も小さな相関値となるΔn(最も一致度が高いずらし量)を着目部の透過像上の移動量とする。これにより、模様16の移動量としてΔnが求まる。ここで、もし模様16がX線焦点FからFCDの距離にあった場合、Δnは期待されるずれ画素数ΔNと一致するが、一般的には異なる距離にあるので、ΔNとΔnは異なる値になる。
【0046】
ステップS6で、移動制御部9dは、着目部のxy位置を以下のように求める。
【0047】
図5は、第一の実施形態に係る着目部のxyz位置を求める幾何図((a)平面図、(b)正面図)である。ここで、x,y,z座標の原点Cは回転軸RA上のX線ビーム2の中央位置に定める。
【0048】
第二透過像のROI15’の中心である着目部中心15a’のx,y位置x2,y2を、例えば、式、
y2=FCD・(Δn−ΔN)/Δn ………(2)
x2=(n2−nc)・dpn・(FCD−y2)/FDD ………(3)
を順次計算して求める。ここで、n2は第二透過像上の着目部中心15a’のx方向の画素位置、ncは回転軸RAの投影位置でほぼ画面の中央である。
【0049】
ステップS7で、移動制御部9dは、XY機構6を制御して、テーブル4をx,y方向それぞれに、−x2、−y2だけ移動させて、被検体5の着目部中心15a’を回転軸RA上に来るように合わせる。
【0050】
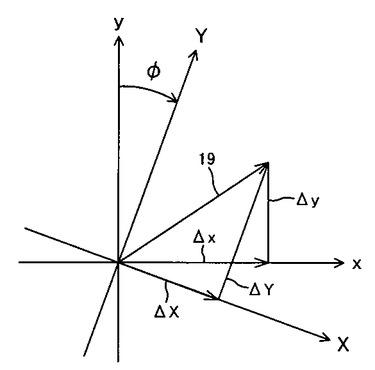
ここで、図6を参照して、回転角度φが0°でないとき、XY機構6の移動方向XとYは方向xとyから回転しているので、移動ベクトル19(Δx,Δy)の移動は、式、
ΔX=Δx・cosφ−Δy・sinφ ………(4)
ΔY=Δx・sinφ+Δy・cosφ ………(5)
で計算されるX移動とY移動を組み合わせて行うようにする。
【0051】
ステップS8で,図5を参照して、移動制御部9dは、第二透過像のROI15’の中心である着目部中心15a’のz位置z2を、例えば、式、
z2=(mc−m2)・dpm・(FCD−y2)/FDD ………(6)
で計算する。ここで、m2は第二透過像上の着目部中心15a’のz方向の画素位置、mcは断面像の中央、dpmは検出面3a上のz方向の1画素サイズである。
【0052】
ステップS9で、移動制御部9dは、回転・昇降機構7を制御して、テーブル4をz方向に、−z2だけ移動させて、被検体5の着目部中心15a’を、検出面3aに対してX線ビーム2の広がりのz方向の中央に合わせる。
【0053】
ステップS10で、移動制御部9dは、シフト機構8を制御して、ROI15で示される着目部の大きさが、検出面3aに対してX線ビーム2のxy面に沿った広がりにちょうど収まるようにFCDを変える。このときのFCDの移動先FCD’は、例えば、式、
FCD’=(FCD−y2)・Nr/N0 ………(7)
で計算する。ここで右辺のFCDは移動前の値、y2は式(2)で求めた値、NrはROI15のn方向の画素数、N0は透過像のn方向画素数である。
【0054】
以上のステップS1ないしステップS10により、被検体5の着目部を断面像視野10の直径内にちょうど収めるようにできる。
【0055】
次に、スキャン制御部9eが断層撮影を制御し、被検体5をX線ビーム2に対し回転させて、多数の方向について透過像を得る。再構成部9fは、得られた多数の方向の透過像を処理して被検体5の着目部内の断面像を得る。
【0056】
(第一の実施の形態の効果)
第一の実施形態によれば、第一透過像上で被検体の着目部を設定するのみで、テーブルを所定距離(S)移動させて撮影した第二透過像上の着目部の移動量(Δn)から着目部のxy面に沿った位置(x2,y2)を求めるので、着目部を簡便に回転軸上に合わせることができる。また、着目部のxy面に沿った位置(y2)を用いて着目部のz方向の位置(z2)を求めるので、着目部を簡便にz方向中央に合わせることができる。また、着目部のxy面に沿った位置(y2)と着目部の大きさ(Nr)とから、着目部の大きさがX線ビーム2のxy面に沿った広がりにちょうど収まる撮影距離(FCD’)に変更するので、着目部を簡便に断面像視野10の直径内にちょうど収めるようにできる。
【0057】
また、第一透過像上の着目部をずらして第二透過像と相関を取って一致度が高いずらし量を着目部の透過像上の移動量として求めるので、透過像上の模様16の移動量として着目部の移動量を正確に求めることができ、着目部を正確に回転軸上に合わせることができる。
【0058】
(第一の実施の形態の変形)
その他、本発明は、上記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変形して実施することが可能である。
【0059】
(変形例1)
第一実施形態のステップS10では、着目部の大きさがX線ビーム2のxy面に沿った広がりにちょうど収まるようにFCDを変えているが、着目部の大きさがX線ビーム2のz方向に沿った広がりにちょうど収まるようにFCDを変えてもよい。この場合は、FCDの移動先FCD’’は、例えば、式、
FCD’’=(FCD−y2)・Mr/M0 ………(8)
で計算する。ここで右辺のFCDは移動前の値、y2は式(2)で求めた値、MrはROI15のm方向の画素数、M0は透過像のm方向画素数である。これにより、着目部を簡便に断面像視野10の高さ内にちょうど収めるようにできる。
【0060】
また、式(7)で計算したFCD’と、式(8)で計算したFCD’’を比較して、大きい方を採用してFCDを変えるようにしてもよい。この場合は、着目部を簡便に断面像視野10の直径内かつ高さ内にちょうど収めるようにできる。
【0061】
(変形例2)
第一実施形態で、移動制御部9dはステップS3ないしステップS10を行なってテーブルのxyz位置およびFCDを自動移動しているが、xy位置のみ自動移動としてもよい。これは、図2でステップS8,S9、S10を省略したフローである。この場合は、着目部を回転軸上に合わせる移動のみが自動で行なわれ、z移動とFCD調整は操作者が表示部9aに表示されたリアルタイム透過像(動画)を目視しながら手動で行う。この場合でも着目部を簡便に回転軸上に合わせることができ、着目部が回転軸に合っていることでz移動とFCD調整は手動でも比較的容易である。
【0062】
さらに、同様に、xyz位置のみ自動移動(ステップS10を省略)とすることも、xy移動とFCD調整のみを自動移動(ステップS8,S9を省略)とすることもできる。
【0063】
(変形例3)
第一の実施形態では、ステップS3でテーブル4をx方向に所定距離移動させているが、z方向に所定距離移動するようにしてもよい。この場合の変更点は以下のとおりである。
【0064】
ステップS3で、テーブル4をx方向に移動させる代わりに、式、
S=ΔM・dpm・FCD/FDD ………(1’)
で計算される所定距離Sだけz方向に移動させる。ここでΔMは期待されるずれ画素数で、定数(例えば50)である。dpmは検出面3a上のz方向の1画素サイズで、定数である。
【0065】
ステップS5で、第二透過像上でROI15を、形を保ったままz方向にΔm画素ずらしROI15’としたときのROI15’内の画像と、ステップS1で記憶した第一透過像のROI15内の画像との相関を取る。相関は、例えば、対応する画素間の画像値の差の絶対値をROI内の全画素数分加算して相関値を求め、ずらし量Δmを変えて行き、最も小さな相関値となるΔm(最も一致度が高いずらし量)を着目部の透過像上の移動量とする。ここで、もし模様16がX線焦点FからFCDの距離にあった場合、Δmは期待されるずれ画素数ΔMと一致するが、一般的には異なる距離にあるのでΔMとΔmは異なる値になる。
【0066】
ステップS6で式(2)の代わりに、式、
y2=FCD・(Δm−ΔM)/Δm ………(2’)
を用いる。
【0067】
(変形例4)
第一の実施形態で、所定距離Sだけx方向に移動させるが、xのプラス方向でもマイナス方向でもよい。マイナス方向へ移動させる場合はΔNに負の数値を用いるだけで、計算式はそのまま使用できる。また、変形例3でも、マイナス方向へ移動させる場合はΔMに負の数値を用いるだけでよい。
【0068】
また、第一透過像上のROI15の位置が透過像の中央に近づく向きに所定距離Sだけ移動させるようにすると、第二透過像上でROI15’が透過像からはみ出すことが生じないので都合がよい。
【0069】
(本発明の第二の実施の形態の構成)
以下、本発明の第二の実施形態の構成について図7を参照して説明する。
【0070】
図7は本発明の第二実施形態に係るCT装置の構成を示した模式図(正面図)である。
【0071】
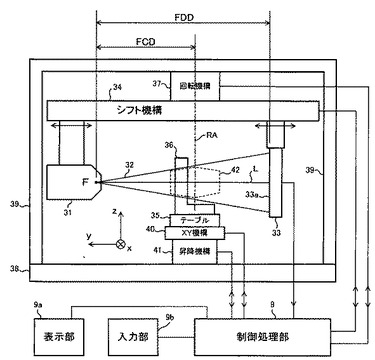
X線管(放射線源)31と、X線管31のX線焦点Fより放射されたX線の一部であるコーン状のX線ビーム(放射線)32を2次元の分解能で検出するX線検出器(放射線検出手段)33とが対向してシフト機構34上に配置され、このX線ビーム32に入るようにテーブル35上に載置された被検体36を透過したX線ビーム32がX線検出器33により検出され、透過像(透過データ)として出力される。
【0072】
X線管31とX線検出器33はシフト機構(撮影距離変更手段)34とともに回転機構37(回転手段)によりX線ビーム32と交差する(X線ビーム32の光軸Lに対して垂直に交差し、実質的に垂直な方向であれば良い。)回転軸RAに対して回転され、回転機構37はベース38から支柱39により支持されている。さらに、X線管31およびX線検出器33はシフト機構34により回転軸RAに近づけあるいは遠ざけることができ、撮影距離FCDと検出距離FDDを変えることができる。
【0073】
テーブル35はXY機構(xy移動手段)40上に配置され、XY機構40はベース38に支持された昇降機構(z移動手段)41上に配置されている。XY機構40は、回転軸RAに対しテーブル35を回転軸RAと直交するxy面内で移動させ、昇降機構41は、テーブル35を回転軸RAと平行なz方向にz移動(昇降)させる。
【0074】
ここで、XY機構40は、被検体36の着目部が回転軸RA上になるように位置調整するために用いられ、シフト機構34は目的に応じて撮影倍率(=FDD/FCD)を変更するために用いられ、昇降機構41は被検体36の着目部をX線ビーム32の高さに合わせるのに用いられる。また、回転機構37は断面像を撮影する場合にX線ビーム32を被検体36に対し回転させて、多数の方向について透過像を得るために用いられる。
【0075】
図7に示す断面像視野(あるいはスキャン領域と称する)42は、X線ビーム32が回転軸RAに対して1回転する間に、常にX線検出器33で検出されるX線ビーム32に包含される領域と定義される。断面像視野42は回転軸RAを軸とする略円筒状の領域であり、無理なく断面像を再構成できる領域である。
【0076】
構成要素として、他に、各機構部(シフト機構34、回転機構37、XY機構40、昇降機構41)を制御し、また、X線検出器33からの透過データを処理する制御処理部9、処理結果等を表示する表示部9a(表示手段)、X線管31を制御するX線制御部(図示せず)等がある。
【0077】
制御処理部9は第一実施形態と同一の構成で、通常のコンピュータであり、CPU、メモリ、ディスク、表示部9a、入力部(キーボードやマウス等)9b、機構制御ボード、インターフェース、等より成っている。
【0078】
制御処理部9は、機構制御ボードにより、各機構部34,37,40、41の動作位置の信号(エンコーダパルス等)を受けて各機構部34,37,40、41を制御して被検体の位置合わせやスキャン(断層撮影走査)等を行わせる他、透過データの収集指令パルス等をX線検出器33に送る。なお、各機構部34,37,40、41には図示してないエンコーダが取付けられており、テーブル35のXY機構40による移動位置X,Y、昇降機構41によるz移動位置z、回転機構37による回転角度φ、及びシフト機構34によるFCD,FDDが読み取られ、それぞれ制御処理部9に送られる。
【0079】
また、制御処理部9は、断層撮影時にX線検出器33からの透過データを収集し、記憶し、再構成処理して被検体の断面像を作成し、表示部9aに表示する。
【0080】
また、制御処理部9は、X線制御部(図示せず)に指令を出し、管電圧、管電流を指定すると共に、X線の放射、停止の指示を行なう。管電圧、管電流は被検体に合わせて変えることができる。
【0081】
制御処理部9は、図1と同様に、ソフトウエアを読み込んでCPUが機能する機能ブロックとして、透過像上で着目部の設定を受け付けるROI設定部(受付手段)9c、設定された着目部を回転軸RA上に移動する移動制御部(移動制御手段)9d、断層撮影をするためのスキャン制御部9e、透過像データを用いて断面像を作成する再構成部(再構成手段)9f、等を備えている。
【0082】
(第二の実施の形態の作用)
第二実施形態の作用においては、第一実施形態に係る、XY機構6によるXY移動、回転・昇降機構7によるz移動、回転・昇降機構7による回転角度φの変更及びシフト機構8によるFCD,FDDの変更が、第二実施形態では、それぞれ、XY機構40によるXY移動、昇降機構41によるz移動、回転機構37による回転角度φの変更及びシフト機構34によるFCD,FDDの変更に置き換わるのみである。これらの動きによる被検体36とX線ビーム32間の相対的な動きは第一実施形態と第二実施形態で全く同じである。
【0083】
したがって、第二実施形態の作用は、第一実施形態の作用と同様になるので記載を省略する。
【0084】
(第二の実施の形態の効果)
第二の実施形態によれば、第一の実施形態と同様の効果をあげることができるが、それに加えて、被検体を回転させずに断層撮影できるので、軟弱な被検体でも断層撮影できる効果がある。
【0085】
(第二の実施の形態の変形)
その他、本発明は、上記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変形して実施することが可能で、例えば、第一の実施形態と同様の変形が可能である。また、以下の変形も可能である。
【0086】
(変形例1)
第二実施形態ではテーブル35を昇降機構41でz移動させているが、X線管31とX線検出器33とを一体的にz移動させてもよい。要は、テーブル35とX線ビーム32とが相対的にz移動すればよい。
【0087】
また、テーブル35をXY機構40でxy面に沿って移動させているが、回転軸RA及びX線ビーム32をxy面に沿って移動させてもよい。(この場合、回転機構37、シフト機構34、X線管31、X線検出器33の全体を支柱39に対して移動させる。)要は、テーブル35が回転軸RA及びX線ビーム32に対してxy面に沿って相対的にxy移動すればよい。
【符号の説明】
【0088】
1…X線管、2…X線ビーム、3…X線検出器、3a…検出面、4…テーブル、5…被検体、6…XY機構、7…回転・昇降機構、8…シフト機構、9…制御処理部、9a…表示部、9b…入力部、9c…ROI設定部、9d…移動制御部、9e…スキャン制御部、9f…再構成部、10…断面像視野、14…第一の透過像、15,15’…ROI、15a,15a’…着目部中心、16…模様、17…第二の透過像、19…移動ベクトル、31…X線管、32…X線ビーム、33…X線検出器、34…シフト機構、35…テーブル、36…被検体、37…回転機構、38…ベース、39…支柱、40…XY機構、41…昇降機構、42…断面像視野、101…X線管、102…X線ビーム、103…X線検出器、104…テーブル、105…被検体、106…XY機構、107…回転・昇降機構、108…制御処理部、109…シフト機構、110…断面像視野
【技術分野】
【0001】
本発明は、被検体の断面像を撮影するコンピュータ断層撮影装置(以下CT(Computed Tomography)装置と記載する。)に関する。
【背景技術】
【0002】
従来のCT装置で、所謂RR(Rotate Rotate)方式(第三世代方式)と呼ばれるCT装置は、放射線源から発生する放射線(X線)を被検体に向けて照射し、被検体を放射線の光軸の方向に対し交差する回転軸で放射線に対して相対的に回転させ、一回転中の所定回転位置ごとに被検体から透過してくる放射線を1次元あるいは2次元の複数検出チャンネルを有する放射線検出器で検出し、この検出器出力から被検体の断面像ないし3次元データを得る(断層撮影する)ものである。
【0003】
従来例として図8に、特許文献1に記載されているCT装置の構成を示す(図8(a)平面図、図8(b)正面図)。X線管101と、ここから発生するコーン状のX線ビーム102を2次元の分解能で検出するX線検出器103が対向して配置され、このX線ビーム102に入るようにテーブル104上に載置された被検体105の透過像(透過データ)を得るようになっている。
【0004】
テーブル104はXY機構106上に配置され、XY機構106は回転・昇降機構107上に配置されている。被検体105の断面像を撮影する場合は、テーブル104を回転軸RAに対し回転・昇降機構107により1回転させながら多数の方向について透過像を得る(スキャンと言う)。このスキャンにより得られた多数の透過像を制御処理部108で処理して被検体105の断面像(1枚ないし多数枚)を得る。
【0005】
ここで、XY機構106は、回転軸RAに対しテーブル104を回転軸RAと直交する面内で移動させ、被検体105の着目部が回転軸RA上になるように位置調整するために用いられる。
【0006】
さらに、回転軸RAおよびX線検出器103はシフト機構109によりX線管101に近づけあるいは遠ざけることができ、目的に応じて撮影倍率(=FDD/FCD)を変更できるようになっている。
【0007】
図8に示す断面像視野(あるいはスキャン領域と称する)110は、テーブル104が回転軸RAに対して1回転する間に、常にX線検出器103で検出されるX線ビーム102に包含される領域と定義される。断面像視野110は回転軸RAを軸とする略円筒状の領域であり、無理なく断面像を再構成できる領域である。
【0008】
ところで、撮影に先立ち、被検体105の着目部を断面像視野110に収める必要があるが、断面像視野110を直接目視できないため着目部の位置設定が難しい。そこで、特許文献1のCT装置では、撮影倍率を低く設定した状態で仮断層撮影を行って得た断面像を表示し、この断面像上で操作者が着目部をROI(Region of Interest)指定すると、このROI指定した部分の中央が回転軸上に来るように自動的にXY機構106を制御している。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2002−310943号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
従来技術では、被検体の着目部が回転軸上に来るように配置するとき、仮の断層撮影をおこない、仮の断面像を再構成していた。このため、操作者としては着目部をROI指定する前に、仮の断層撮影と仮の断面像の再構成の時間を待たされることになり、使用勝手として簡便ではなかった。
【0011】
本発明は上記事情に鑑みてなされたもので、被検体の着目部を簡便に回転軸上に合わせることができるCT装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するため、請求項1記載の本発明に係るCT装置は、テーブル上に載置された被検体に向けて放射線を放射する放射線源と、前記被検体を透過した放射線を検出して透過像として出力する放射線検出手段と、前記放射線と交差する回転軸に対し前記テーブルと前記放射線とを相対的に回転させる回転手段と、前記回転の多数の方向で検出された透過像から前記被検体の断面像を再構成する再構成手段を有するCT装置において、前記テーブルを前記回転軸及び前記放射線に対し前記回転軸と直交するxy面に沿って相対的にxy移動させるxy移動手段と、前記テーブルを前記放射線に対し前記回転軸と平行なz方向に相対的にz移動させるz移動手段と、1つの前記回転の位置で前記放射線検出手段が検出した第一の透過像を表示する表示手段と、前記表示手段に表示された前記第一の透過像上で着目部の設定を受け付ける受付手段と、前記受付手段により前記第一の透過像上で前記着目部が設定されると、前記xy移動手段を制御して前記テーブルを前記放射線を横切る方向へ所定距離相対的にxy移動させてからあるいは前記z移動手段を制御して前記テーブルを前記z方向へ所定距離相対的にz移動させてから第二の透過像を前記放射線検出手段で検出させ、前記第一の透過像と前記第二の透過像とから前記着目部の透過像上の移動量を求め、前記求めた透過像上の移動量から前記着目部の前記xy面に沿った位置を求め、前記xy移動手段を制御して前記着目部を前記回転軸上に合わせるように前記テーブルを相対的にxy移動させる移動制御手段とを有することを要旨とする。
【0013】
この構成により、第一透過像上で被検体の着目部を設定するのみで、テーブルを所定距離(S)移動させて撮影した第二透過像上の着目部の移動量(Δn)から着目部のxy面に沿った位置(x2,y2)を求めるので、着目部を簡便に回転軸上に合わせることができる。
【0014】
請求項2記載の本発明に係るCT装置は、請求項1に記載のCT装置において、前記移動制御手段は、さらに、求めた前記着目部の前記xy面に沿った位置を用いて、前記着目部が前記放射線の広がりの前記z方向の中央になるように、前記z移動手段を制御して前記テーブルを相対的にz移動させることを要旨とする。
【0015】
この構成により、第一透過像上で被検体の着目部を設定するのみで、着目部のxy面に沿った位置(y2)を用いて着目部のz方向の位置(z2)を求めるので、着目部を簡便にz方向中央に合わせることができる。
【0016】
請求項3記載の本発明に係るCT装置は、請求項1または請求項2に記載のCT装置において、前記放射線源と前記回転軸との距離である撮影距離を変更する撮影距離変更手段を有し、前記移動制御手段は、さらに、求めた前記着目部の前記xy面に沿った位置および設定された前記着目部の大きさとから、前記着目部の大きさが前記放射線の前記xy面に沿った広がりにあるいは前記放射線の前記z方向に沿った広がりにちょうど収まる前記撮影距離となるように、前記撮影距離変更手段を制御して前記撮影距離を変更することを要旨とする。
【0017】
この構成により、第一透過像上で被検体の着目部を設定するのみで、着目部のxy面に沿った位置(y2)と着目部の大きさ(NrまたはMr)とから、着目部の大きさがX線ビーム2のxy面に沿った広がりまたはz方向に沿った広がりにちょうど収まる撮影距離(FCD’またはFCD’’)に変更するので、着目部を簡便に断面像視野10の直径内または高さ内にちょうど収めるようにできる。
【0018】
請求項4記載の本発明に係るCT装置は、請求項1ないし請求項3のいずれか1項に記載のCT装置において、前記移動制御手段は、前記第一の透過像上で設定された着目部をずらして前記第二の透過像と比較し、一致度が高いずらし量を前記着目部の透過像上の移動量として求めることを要旨とする。
【0019】
この構成により、第一透過像上の着目部をずらして第二透過像と相関を取って一致度が高いずらし量を着目部の透過像上の移動量として求めるので、透過像上の模様16の移動量として着目部の移動量を正確に求めることができ、着目部を正確に回転軸上に合わせることができる。
【発明の効果】
【0020】
本発明によれば、被検体の着目部を簡便に回転軸上に合わせることができる。
【図面の簡単な説明】
【0021】
【図1】本発明の第一実施形態に係るCT装置の構成を示した模式図((a)平面図、(b)正面図)。
【図2】本発明の第一の実施形態に係る断層撮影に先立つ被検体の配置調整のフロー図。
【図3】第一の実施形態に係る第一の透過像を示す模式図。
【図4】第一の実施形態に係る第二の透過像を示す模式図。
【図5】第一の実施形態に係る着目部のxyz位置を求める幾何図((a)平面図、(b)正面図)。
【図6】第一の実施形態に係るxy方向とXY方向の関係を示す幾何図(平面図)。
【図7】本発明の第二実施形態に係るCT装置の構成を示した模式図(正面図)。
【図8】従来のCT装置の構成を示した模式図((a)平面図、(b)正面図)。
【発明を実施するための形態】
【0022】
以下、図面を参照して、本発明実施形態を説明する。
【0023】
(本発明の第一の実施の形態の構成)
以下、本発明の第一の実施形態の構成について図1を参照して説明する。
【0024】
図1は本発明の第一実施形態に係るCT装置の構成を示した模式図(図1(a)平面図、図1(b)正面図)である。
【0025】
X線管(放射線源)1と、X線管1のX線焦点Fより放射されたX線の一部であるコーン状のX線ビーム(放射線)2を2次元の分解能で検出するX線検出器(放射線検出手段)3とが対向して配置され、このX線ビーム2に入るようにテーブル4上に載置された被検体5を透過したX線ビーム2がX線検出器3により検出され、透過像(透過データ)として出力される。
【0026】
テーブル4はXY機構(xy移動手段)6上に配置され、XY機構6は回転・昇降機構(回転手段、z移動手段)7上に配置されている。テーブル4は回転・昇降機構7によりX線ビーム2と交差する(X線ビーム2の光軸Lに対して垂直に交差し、実質的に垂直な方向であれば良い。)回転軸RAに対して回転されるとともに、回転軸RAと平行なz方向にz移動(昇降)される。XY機構6は、回転軸RAに対しテーブル4を回転軸RAと直交するxy面内で移動させる。
【0027】
さらに、シフト機構(撮影距離変更手段)8により回転軸RAおよびX線検出器3をX線管1に近づけあるいは遠ざけることができ、X線管1のX線焦点Fと回転軸RAとの間の撮影距離FCD(Focus to rotation Center Distance)と、X線焦点FとX線検出器3の検出面3aとの間の検出距離FDD(Focus to Detector Distance)を変えることができる。
【0028】
ここで、XY機構6は、被検体5の着目部が回転軸RA上になるように位置調整するために用いられ、シフト機構8は目的に応じて撮影倍率(=FDD/FCD)を変更するために用いられ、回転・昇降機構7のz移動は被検体5の着目部をX線ビーム2の高さに合わせるのに用いられる。また、回転・昇降機構7の回転は断面像を撮影する場合に被検体5をX線ビーム2に対し回転させて、多数の方向について透過像を得るために用いられる。
【0029】
図1に示す断面像視野(あるいはスキャン領域と称する)10は、テーブル4が回転軸RAに対して1回転する間に、常にX線検出器3で検出されるX線ビーム2に包含される領域と定義される。断面像視野10は回転軸RAを軸とする略円筒状の領域であり、無理なく断面像を再構成できる領域である。
【0030】
構成要素として、他に、各機構部(XY機構6、回転・昇降機構7、シフト機構8)を制御し、また、X線検出器3からの透過データを処理する制御処理部9、処理結果等を表示する表示部9a(表示手段)、X線管1を制御するX線制御部(図示せず)等がある。
【0031】
制御処理部9は通常のコンピュータで、CPU、メモリ、ディスク、表示部9a、入力部(キーボードやマウス等)9b、機構制御ボード、インターフェース、等より成っている。
【0032】
制御処理部9は、機構制御ボードにより、各機構部6,7,8の動作位置の信号(エンコーダパルス等)を受けて各機構部6,7,8を制御して被検体の位置合わせやスキャン(断層撮影走査)等を行わせる他、透過データの収集指令パルス等をX線検出器3に送る。なお、各機構部6,7,8には図示していないエンコーダが取付けられており、テーブル4のXY機構6による移動位置X,Y、回転・昇降機構7によるz移動位置zと回転角度φ、及びシフト機構8によるFCD,FDDが読み取られ、それぞれ制御処理部9に送られる。
【0033】
また、制御処理部9は、断層撮影時にX線検出器3からの透過データを収集し、記憶し、再構成処理して被検体の断面像を作成し、表示部9aに表示する。
【0034】
また、制御処理部9は、X線制御部(図示せず)に指令を出し、管電圧、管電流を指定すると共に、X線の放射、停止の指示を行なう。管電圧、管電流は被検体に合わせて変えることができる。
【0035】
図1に示すように、制御処理部9はソフトウェアを読み込んでCPUが機能する機能ブロックとして、透過像上で着目部の設定を受け付けるROI設定部(受付手段)9c、設定された着目部を回転軸RA上に移動する移動制御部(移動制御手段)9d、断層撮影をするためのスキャン制御部9e、透過データを用いて断面像を作成する再構成部(再構成手段)9f、等を備えている。
【0036】
(第一の実施の形態の作用)
本発明の第一の実施形態の作用について図2ないし図6を参照して説明する。
【0037】
図2は第一の実施形態に係る断層撮影に先立つ被検体の配置調整のフロー図である。
【0038】
まず、断層撮影に先立ち、図2のフローに従って、以下に記載するように被検体5の着目部を断面像視野10の中央に収める。
【0039】
ステップS1で、操作者は被検体5をテーブル4に載置し、入力部9bからX線照射指令を入力すると、制御処理部9はX線検出器3の出力を取込み、被検体5の第一の透過像を制御処理部9の適宜な記憶部(図示せず)に記憶し、表示部9aに表示する。
【0040】
ステップS2で、第一の透過像上で着目部の設定を以下のように行う。図3は第一の実施形態に係る第一の透過像を示す模式図である。操作者は入力部9bから入力することで、第一の透過像14に重ねて矩形ROI(Region of Interest)15を表示させ、ROI15の大きさと位置を調整して着目部を設定する。このとき操作者は、第一の透過像14で特徴的な模様16を頼りに着目部を設定する。ROI設定部9cはこの入力を受け付けてROI15を設定して記憶する。ここで記憶するデータは、例えば、ROI15の位置、大きさに関するデータであり、制御処理部9の適宜な記憶部(図示せず)に記憶される。この設定したROI15が設定した着目部を表す。15aは着目部中心である。
【0041】
次に、移動制御部9dは以下に記載するようにステップS3ないしステップS10を実行して被検体5の着目部を断面像視野10の中央に収める。
【0042】
ステップS3で、移動制御部9dはXY機構6を制御してテーブル4をx方向に所定距離移動させる。ここでx方向は、xy面内でX線ビーム2を直角に横切る方向(X線ビーム2の光軸Lに対して直角となる方向で、実質的に直角であれば良い。)で、y方向はX線ビーム2に沿った方向(X線ビーム2の光軸Lに対して平行となる方向で、実質的に平行であれば良い。)で、x方向とy方向は互いに直交している。回転角度φが0°のとき、XY機構6の移動方向XとYはそれぞれx方向とy方向に一致しているので、x方向の移動はX移動のみで行われる。回転角度φが0°でないとき、XY機構6の移動方向XとYは方向xとyから回転しているのでx方向の移動はX移動とY移動を組み合わせて行うようにする。
【0043】
移動させるx方向の所定距離としては、撮影倍率(=FDD/FCD)が大きいほど小さな量を選ぶ。例えば、所定距離Sは式、
S=ΔN・dpn・FCD/FDD ………(1)
で計算する。ΔNは期待されるずれ画素数で、定数(例えば50)である。dpnは検出面3a上のx方向の1画素サイズで、定数である。
【0044】
ステップS3でテーブル4をx方向に所定距離Sだけ移動させた後、ステップS4で、移動制御部9dは、X線を照射させX線検出器3の出力を取込み、被検体5の第二の透過像を制御処理部9の適宜な記憶部(図示せず)に記憶する。図4は第一の実施形態に係る第二の透過像を示す模式図である。第二の透過像17上では、第一の透過像14と比べて、被検体5はx方向に移動しており、透過像上の模様16を有する着目部もx方向に移動している。
【0045】
ステップS5で、着目部の透過像上の移動量を以下のように求める。第二透過像上でROI15を、形を保ったままx方向にΔn画素ずらし、ROI15’としたときのROI15’内の画像と、ステップS1で記憶した第一透過像のROI15内の画像との相関を取る。相関は、例えば、対応する画素間の画像値の差の絶対値をROI内の全画素数分加算して相関値を求め、ずらし量Δnを変えて行き、最も小さな相関値となるΔn(最も一致度が高いずらし量)を着目部の透過像上の移動量とする。これにより、模様16の移動量としてΔnが求まる。ここで、もし模様16がX線焦点FからFCDの距離にあった場合、Δnは期待されるずれ画素数ΔNと一致するが、一般的には異なる距離にあるので、ΔNとΔnは異なる値になる。
【0046】
ステップS6で、移動制御部9dは、着目部のxy位置を以下のように求める。
【0047】
図5は、第一の実施形態に係る着目部のxyz位置を求める幾何図((a)平面図、(b)正面図)である。ここで、x,y,z座標の原点Cは回転軸RA上のX線ビーム2の中央位置に定める。
【0048】
第二透過像のROI15’の中心である着目部中心15a’のx,y位置x2,y2を、例えば、式、
y2=FCD・(Δn−ΔN)/Δn ………(2)
x2=(n2−nc)・dpn・(FCD−y2)/FDD ………(3)
を順次計算して求める。ここで、n2は第二透過像上の着目部中心15a’のx方向の画素位置、ncは回転軸RAの投影位置でほぼ画面の中央である。
【0049】
ステップS7で、移動制御部9dは、XY機構6を制御して、テーブル4をx,y方向それぞれに、−x2、−y2だけ移動させて、被検体5の着目部中心15a’を回転軸RA上に来るように合わせる。
【0050】
ここで、図6を参照して、回転角度φが0°でないとき、XY機構6の移動方向XとYは方向xとyから回転しているので、移動ベクトル19(Δx,Δy)の移動は、式、
ΔX=Δx・cosφ−Δy・sinφ ………(4)
ΔY=Δx・sinφ+Δy・cosφ ………(5)
で計算されるX移動とY移動を組み合わせて行うようにする。
【0051】
ステップS8で,図5を参照して、移動制御部9dは、第二透過像のROI15’の中心である着目部中心15a’のz位置z2を、例えば、式、
z2=(mc−m2)・dpm・(FCD−y2)/FDD ………(6)
で計算する。ここで、m2は第二透過像上の着目部中心15a’のz方向の画素位置、mcは断面像の中央、dpmは検出面3a上のz方向の1画素サイズである。
【0052】
ステップS9で、移動制御部9dは、回転・昇降機構7を制御して、テーブル4をz方向に、−z2だけ移動させて、被検体5の着目部中心15a’を、検出面3aに対してX線ビーム2の広がりのz方向の中央に合わせる。
【0053】
ステップS10で、移動制御部9dは、シフト機構8を制御して、ROI15で示される着目部の大きさが、検出面3aに対してX線ビーム2のxy面に沿った広がりにちょうど収まるようにFCDを変える。このときのFCDの移動先FCD’は、例えば、式、
FCD’=(FCD−y2)・Nr/N0 ………(7)
で計算する。ここで右辺のFCDは移動前の値、y2は式(2)で求めた値、NrはROI15のn方向の画素数、N0は透過像のn方向画素数である。
【0054】
以上のステップS1ないしステップS10により、被検体5の着目部を断面像視野10の直径内にちょうど収めるようにできる。
【0055】
次に、スキャン制御部9eが断層撮影を制御し、被検体5をX線ビーム2に対し回転させて、多数の方向について透過像を得る。再構成部9fは、得られた多数の方向の透過像を処理して被検体5の着目部内の断面像を得る。
【0056】
(第一の実施の形態の効果)
第一の実施形態によれば、第一透過像上で被検体の着目部を設定するのみで、テーブルを所定距離(S)移動させて撮影した第二透過像上の着目部の移動量(Δn)から着目部のxy面に沿った位置(x2,y2)を求めるので、着目部を簡便に回転軸上に合わせることができる。また、着目部のxy面に沿った位置(y2)を用いて着目部のz方向の位置(z2)を求めるので、着目部を簡便にz方向中央に合わせることができる。また、着目部のxy面に沿った位置(y2)と着目部の大きさ(Nr)とから、着目部の大きさがX線ビーム2のxy面に沿った広がりにちょうど収まる撮影距離(FCD’)に変更するので、着目部を簡便に断面像視野10の直径内にちょうど収めるようにできる。
【0057】
また、第一透過像上の着目部をずらして第二透過像と相関を取って一致度が高いずらし量を着目部の透過像上の移動量として求めるので、透過像上の模様16の移動量として着目部の移動量を正確に求めることができ、着目部を正確に回転軸上に合わせることができる。
【0058】
(第一の実施の形態の変形)
その他、本発明は、上記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変形して実施することが可能である。
【0059】
(変形例1)
第一実施形態のステップS10では、着目部の大きさがX線ビーム2のxy面に沿った広がりにちょうど収まるようにFCDを変えているが、着目部の大きさがX線ビーム2のz方向に沿った広がりにちょうど収まるようにFCDを変えてもよい。この場合は、FCDの移動先FCD’’は、例えば、式、
FCD’’=(FCD−y2)・Mr/M0 ………(8)
で計算する。ここで右辺のFCDは移動前の値、y2は式(2)で求めた値、MrはROI15のm方向の画素数、M0は透過像のm方向画素数である。これにより、着目部を簡便に断面像視野10の高さ内にちょうど収めるようにできる。
【0060】
また、式(7)で計算したFCD’と、式(8)で計算したFCD’’を比較して、大きい方を採用してFCDを変えるようにしてもよい。この場合は、着目部を簡便に断面像視野10の直径内かつ高さ内にちょうど収めるようにできる。
【0061】
(変形例2)
第一実施形態で、移動制御部9dはステップS3ないしステップS10を行なってテーブルのxyz位置およびFCDを自動移動しているが、xy位置のみ自動移動としてもよい。これは、図2でステップS8,S9、S10を省略したフローである。この場合は、着目部を回転軸上に合わせる移動のみが自動で行なわれ、z移動とFCD調整は操作者が表示部9aに表示されたリアルタイム透過像(動画)を目視しながら手動で行う。この場合でも着目部を簡便に回転軸上に合わせることができ、着目部が回転軸に合っていることでz移動とFCD調整は手動でも比較的容易である。
【0062】
さらに、同様に、xyz位置のみ自動移動(ステップS10を省略)とすることも、xy移動とFCD調整のみを自動移動(ステップS8,S9を省略)とすることもできる。
【0063】
(変形例3)
第一の実施形態では、ステップS3でテーブル4をx方向に所定距離移動させているが、z方向に所定距離移動するようにしてもよい。この場合の変更点は以下のとおりである。
【0064】
ステップS3で、テーブル4をx方向に移動させる代わりに、式、
S=ΔM・dpm・FCD/FDD ………(1’)
で計算される所定距離Sだけz方向に移動させる。ここでΔMは期待されるずれ画素数で、定数(例えば50)である。dpmは検出面3a上のz方向の1画素サイズで、定数である。
【0065】
ステップS5で、第二透過像上でROI15を、形を保ったままz方向にΔm画素ずらしROI15’としたときのROI15’内の画像と、ステップS1で記憶した第一透過像のROI15内の画像との相関を取る。相関は、例えば、対応する画素間の画像値の差の絶対値をROI内の全画素数分加算して相関値を求め、ずらし量Δmを変えて行き、最も小さな相関値となるΔm(最も一致度が高いずらし量)を着目部の透過像上の移動量とする。ここで、もし模様16がX線焦点FからFCDの距離にあった場合、Δmは期待されるずれ画素数ΔMと一致するが、一般的には異なる距離にあるのでΔMとΔmは異なる値になる。
【0066】
ステップS6で式(2)の代わりに、式、
y2=FCD・(Δm−ΔM)/Δm ………(2’)
を用いる。
【0067】
(変形例4)
第一の実施形態で、所定距離Sだけx方向に移動させるが、xのプラス方向でもマイナス方向でもよい。マイナス方向へ移動させる場合はΔNに負の数値を用いるだけで、計算式はそのまま使用できる。また、変形例3でも、マイナス方向へ移動させる場合はΔMに負の数値を用いるだけでよい。
【0068】
また、第一透過像上のROI15の位置が透過像の中央に近づく向きに所定距離Sだけ移動させるようにすると、第二透過像上でROI15’が透過像からはみ出すことが生じないので都合がよい。
【0069】
(本発明の第二の実施の形態の構成)
以下、本発明の第二の実施形態の構成について図7を参照して説明する。
【0070】
図7は本発明の第二実施形態に係るCT装置の構成を示した模式図(正面図)である。
【0071】
X線管(放射線源)31と、X線管31のX線焦点Fより放射されたX線の一部であるコーン状のX線ビーム(放射線)32を2次元の分解能で検出するX線検出器(放射線検出手段)33とが対向してシフト機構34上に配置され、このX線ビーム32に入るようにテーブル35上に載置された被検体36を透過したX線ビーム32がX線検出器33により検出され、透過像(透過データ)として出力される。
【0072】
X線管31とX線検出器33はシフト機構(撮影距離変更手段)34とともに回転機構37(回転手段)によりX線ビーム32と交差する(X線ビーム32の光軸Lに対して垂直に交差し、実質的に垂直な方向であれば良い。)回転軸RAに対して回転され、回転機構37はベース38から支柱39により支持されている。さらに、X線管31およびX線検出器33はシフト機構34により回転軸RAに近づけあるいは遠ざけることができ、撮影距離FCDと検出距離FDDを変えることができる。
【0073】
テーブル35はXY機構(xy移動手段)40上に配置され、XY機構40はベース38に支持された昇降機構(z移動手段)41上に配置されている。XY機構40は、回転軸RAに対しテーブル35を回転軸RAと直交するxy面内で移動させ、昇降機構41は、テーブル35を回転軸RAと平行なz方向にz移動(昇降)させる。
【0074】
ここで、XY機構40は、被検体36の着目部が回転軸RA上になるように位置調整するために用いられ、シフト機構34は目的に応じて撮影倍率(=FDD/FCD)を変更するために用いられ、昇降機構41は被検体36の着目部をX線ビーム32の高さに合わせるのに用いられる。また、回転機構37は断面像を撮影する場合にX線ビーム32を被検体36に対し回転させて、多数の方向について透過像を得るために用いられる。
【0075】
図7に示す断面像視野(あるいはスキャン領域と称する)42は、X線ビーム32が回転軸RAに対して1回転する間に、常にX線検出器33で検出されるX線ビーム32に包含される領域と定義される。断面像視野42は回転軸RAを軸とする略円筒状の領域であり、無理なく断面像を再構成できる領域である。
【0076】
構成要素として、他に、各機構部(シフト機構34、回転機構37、XY機構40、昇降機構41)を制御し、また、X線検出器33からの透過データを処理する制御処理部9、処理結果等を表示する表示部9a(表示手段)、X線管31を制御するX線制御部(図示せず)等がある。
【0077】
制御処理部9は第一実施形態と同一の構成で、通常のコンピュータであり、CPU、メモリ、ディスク、表示部9a、入力部(キーボードやマウス等)9b、機構制御ボード、インターフェース、等より成っている。
【0078】
制御処理部9は、機構制御ボードにより、各機構部34,37,40、41の動作位置の信号(エンコーダパルス等)を受けて各機構部34,37,40、41を制御して被検体の位置合わせやスキャン(断層撮影走査)等を行わせる他、透過データの収集指令パルス等をX線検出器33に送る。なお、各機構部34,37,40、41には図示してないエンコーダが取付けられており、テーブル35のXY機構40による移動位置X,Y、昇降機構41によるz移動位置z、回転機構37による回転角度φ、及びシフト機構34によるFCD,FDDが読み取られ、それぞれ制御処理部9に送られる。
【0079】
また、制御処理部9は、断層撮影時にX線検出器33からの透過データを収集し、記憶し、再構成処理して被検体の断面像を作成し、表示部9aに表示する。
【0080】
また、制御処理部9は、X線制御部(図示せず)に指令を出し、管電圧、管電流を指定すると共に、X線の放射、停止の指示を行なう。管電圧、管電流は被検体に合わせて変えることができる。
【0081】
制御処理部9は、図1と同様に、ソフトウエアを読み込んでCPUが機能する機能ブロックとして、透過像上で着目部の設定を受け付けるROI設定部(受付手段)9c、設定された着目部を回転軸RA上に移動する移動制御部(移動制御手段)9d、断層撮影をするためのスキャン制御部9e、透過像データを用いて断面像を作成する再構成部(再構成手段)9f、等を備えている。
【0082】
(第二の実施の形態の作用)
第二実施形態の作用においては、第一実施形態に係る、XY機構6によるXY移動、回転・昇降機構7によるz移動、回転・昇降機構7による回転角度φの変更及びシフト機構8によるFCD,FDDの変更が、第二実施形態では、それぞれ、XY機構40によるXY移動、昇降機構41によるz移動、回転機構37による回転角度φの変更及びシフト機構34によるFCD,FDDの変更に置き換わるのみである。これらの動きによる被検体36とX線ビーム32間の相対的な動きは第一実施形態と第二実施形態で全く同じである。
【0083】
したがって、第二実施形態の作用は、第一実施形態の作用と同様になるので記載を省略する。
【0084】
(第二の実施の形態の効果)
第二の実施形態によれば、第一の実施形態と同様の効果をあげることができるが、それに加えて、被検体を回転させずに断層撮影できるので、軟弱な被検体でも断層撮影できる効果がある。
【0085】
(第二の実施の形態の変形)
その他、本発明は、上記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変形して実施することが可能で、例えば、第一の実施形態と同様の変形が可能である。また、以下の変形も可能である。
【0086】
(変形例1)
第二実施形態ではテーブル35を昇降機構41でz移動させているが、X線管31とX線検出器33とを一体的にz移動させてもよい。要は、テーブル35とX線ビーム32とが相対的にz移動すればよい。
【0087】
また、テーブル35をXY機構40でxy面に沿って移動させているが、回転軸RA及びX線ビーム32をxy面に沿って移動させてもよい。(この場合、回転機構37、シフト機構34、X線管31、X線検出器33の全体を支柱39に対して移動させる。)要は、テーブル35が回転軸RA及びX線ビーム32に対してxy面に沿って相対的にxy移動すればよい。
【符号の説明】
【0088】
1…X線管、2…X線ビーム、3…X線検出器、3a…検出面、4…テーブル、5…被検体、6…XY機構、7…回転・昇降機構、8…シフト機構、9…制御処理部、9a…表示部、9b…入力部、9c…ROI設定部、9d…移動制御部、9e…スキャン制御部、9f…再構成部、10…断面像視野、14…第一の透過像、15,15’…ROI、15a,15a’…着目部中心、16…模様、17…第二の透過像、19…移動ベクトル、31…X線管、32…X線ビーム、33…X線検出器、34…シフト機構、35…テーブル、36…被検体、37…回転機構、38…ベース、39…支柱、40…XY機構、41…昇降機構、42…断面像視野、101…X線管、102…X線ビーム、103…X線検出器、104…テーブル、105…被検体、106…XY機構、107…回転・昇降機構、108…制御処理部、109…シフト機構、110…断面像視野
【特許請求の範囲】
【請求項1】
テーブル上に載置された被検体に向けて放射線を放射する放射線源と、前記被検体を透過した放射線を検出して透過像として出力する放射線検出手段と、前記放射線と交差する回転軸に対し前記テーブルと前記放射線とを相対的に回転させる回転手段と、前記回転の多数の方向で検出された透過像から前記被検体の断面像を再構成する再構成手段を有するCT装置において、
前記テーブルを前記回転軸及び前記放射線に対し前記回転軸と直交するxy面に沿って相対的にxy移動させるxy移動手段と、
前記テーブルを前記放射線に対し前記回転軸と平行なz方向に相対的にz移動させるz移動手段と、
1つの前記回転の位置で前記放射線検出手段が検出した第一の透過像を表示する表示手段と、
前記表示手段に表示された前記第一の透過像上で着目部の設定を受け付ける受付手段と、
前記受付手段により前記第一の透過像上で前記着目部が設定されると、前記xy移動手段を制御して前記テーブルを前記放射線を横切る方向へ所定距離相対的にxy移動させてからあるいは前記z移動手段を制御して前記テーブルを前記z方向へ所定距離相対的にz移動させてから第二の透過像を前記放射線検出手段で検出させ、前記第一の透過像と前記第二の透過像とから前記着目部の透過像上の移動量を求め、前記求めた透過像上の移動量から前記着目部の前記xy面に沿った位置を求め、前記xy移動手段を制御して前記着目部を前記回転軸上に合わせるように前記テーブルを相対的にxy移動させる移動制御手段と
を有することを特徴とするCT装置。
【請求項2】
請求項1に記載のCT装置において、
前記移動制御手段は、さらに、求めた前記着目部の前記xy面に沿った位置を用いて、前記着目部が前記放射線の広がりの前記z方向の中央になるように、前記z移動手段を制御して前記テーブルを相対的にz移動させることを特徴とするCT装置。
【請求項3】
請求項1または請求項2に記載のCT装置において、
前記放射線源と前記回転軸との距離である撮影距離を変更する撮影距離変更手段を有し、
前記移動制御手段は、さらに、求めた前記着目部の前記xy面に沿った位置および設定された前記着目部の大きさとから、前記着目部の大きさが前記放射線の前記xy面に沿った広がりにあるいは前記放射線の前記z方向に沿った広がりにちょうど収まる前記撮影距離となるように、前記撮影距離変更手段を制御して前記撮影距離を変更することを特徴とするCT装置。
【請求項4】
請求項1ないし請求項3のいずれか1項に記載のCT装置において、
前記移動制御手段は、前記第一の透過像上で設定された着目部をずらして前記第二の透過像と比較し、一致度が高いずらし量を前記着目部の透過像上の移動量として求めることを特徴とするCT装置。
【請求項1】
テーブル上に載置された被検体に向けて放射線を放射する放射線源と、前記被検体を透過した放射線を検出して透過像として出力する放射線検出手段と、前記放射線と交差する回転軸に対し前記テーブルと前記放射線とを相対的に回転させる回転手段と、前記回転の多数の方向で検出された透過像から前記被検体の断面像を再構成する再構成手段を有するCT装置において、
前記テーブルを前記回転軸及び前記放射線に対し前記回転軸と直交するxy面に沿って相対的にxy移動させるxy移動手段と、
前記テーブルを前記放射線に対し前記回転軸と平行なz方向に相対的にz移動させるz移動手段と、
1つの前記回転の位置で前記放射線検出手段が検出した第一の透過像を表示する表示手段と、
前記表示手段に表示された前記第一の透過像上で着目部の設定を受け付ける受付手段と、
前記受付手段により前記第一の透過像上で前記着目部が設定されると、前記xy移動手段を制御して前記テーブルを前記放射線を横切る方向へ所定距離相対的にxy移動させてからあるいは前記z移動手段を制御して前記テーブルを前記z方向へ所定距離相対的にz移動させてから第二の透過像を前記放射線検出手段で検出させ、前記第一の透過像と前記第二の透過像とから前記着目部の透過像上の移動量を求め、前記求めた透過像上の移動量から前記着目部の前記xy面に沿った位置を求め、前記xy移動手段を制御して前記着目部を前記回転軸上に合わせるように前記テーブルを相対的にxy移動させる移動制御手段と
を有することを特徴とするCT装置。
【請求項2】
請求項1に記載のCT装置において、
前記移動制御手段は、さらに、求めた前記着目部の前記xy面に沿った位置を用いて、前記着目部が前記放射線の広がりの前記z方向の中央になるように、前記z移動手段を制御して前記テーブルを相対的にz移動させることを特徴とするCT装置。
【請求項3】
請求項1または請求項2に記載のCT装置において、
前記放射線源と前記回転軸との距離である撮影距離を変更する撮影距離変更手段を有し、
前記移動制御手段は、さらに、求めた前記着目部の前記xy面に沿った位置および設定された前記着目部の大きさとから、前記着目部の大きさが前記放射線の前記xy面に沿った広がりにあるいは前記放射線の前記z方向に沿った広がりにちょうど収まる前記撮影距離となるように、前記撮影距離変更手段を制御して前記撮影距離を変更することを特徴とするCT装置。
【請求項4】
請求項1ないし請求項3のいずれか1項に記載のCT装置において、
前記移動制御手段は、前記第一の透過像上で設定された着目部をずらして前記第二の透過像と比較し、一致度が高いずらし量を前記着目部の透過像上の移動量として求めることを特徴とするCT装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−169647(P2010−169647A)
【公開日】平成22年8月5日(2010.8.5)
【国際特許分類】
【出願番号】特願2009−34493(P2009−34493)
【出願日】平成21年1月26日(2009.1.26)
【出願人】(391017540)東芝ITコントロールシステム株式会社 (107)
【Fターム(参考)】
【公開日】平成22年8月5日(2010.8.5)
【国際特許分類】
【出願日】平成21年1月26日(2009.1.26)
【出願人】(391017540)東芝ITコントロールシステム株式会社 (107)
【Fターム(参考)】
[ Back to top ]