
GMRセンサ
【課題】軽量、小型でありながらも、高温環境下にある機器の測定に用いたとしても信号処理基板の損傷を低減することが可能であり、且つ渦電流の影響を低減することが可能なGMRセンサを提供する。
【解決手段】GMRセンサ10に関し、本発明おいて、樹脂筐体17は、モータケース19を貫通し、且つ一端側20が磁石回転子12の外周面に隣接しており、センサ基板14は、モータケース19内に位置する樹脂筐体17の一端側20に配置され、信号処理基板15は、モータケース19外に位置する樹脂筐体17の他端側23に配置され、モータケース19内に位置する信号接続線16は、GMR素子13を挟んで磁石回転子12と反対側に位置するように配線されることを特徴としている。
【解決手段】GMRセンサ10に関し、本発明おいて、樹脂筐体17は、モータケース19を貫通し、且つ一端側20が磁石回転子12の外周面に隣接しており、センサ基板14は、モータケース19内に位置する樹脂筐体17の一端側20に配置され、信号処理基板15は、モータケース19外に位置する樹脂筐体17の他端側23に配置され、モータケース19内に位置する信号接続線16は、GMR素子13を挟んで磁石回転子12と反対側に位置するように配線されることを特徴としている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転体と同軸で回転する磁石回転子で生成された回転磁界の変化による磁気抵抗の変動を検出して、回転体の回転速度や回転角などを検出するGMR(Giant Magneto−Resistive:巨大磁気抵抗)センサに関するものである。
【背景技術】
【0002】
従来より、例えば、モータの回転角を検出するための回転センサとして、モータロータなどの回転体と同軸で回転する励磁コイルと、モータステータなどの固定体に取り付けられると共に回転体の回転軸周りに配置された複数の検出コイルと、からなり、回転角に対して振幅が変化する複数相の出力信号から回転角を検出するレゾルバがある(例えば、特許文献1)。
【0003】
ところで、近年、著しい進歩を遂げている、例えば、ハイブリッド車、電気自動車などのエコカーにおいては、省エネ性能を向上させるべく、全ての電装部品に対して軽量化が要求されている。しかし、前述したレゾルバは、その重量が300g程度以上であり、軽量化には不向きであった。
【0004】
そこで、軽量化の要求に鑑み、その重量が100g程度以下と前述したレゾルバよりも軽量なGMRセンサを、モータの回転角を検出するために用いようとする試みがなされている(例えば、特許文献2)。
【0005】
GMRセンサは、GMR素子を用いた回転センサであり、磁石回転子で生成された回転磁界の変化で磁気抵抗が変動する磁気抵抗効果を利用して回転角や回転速度を検出するものである。
【0006】
また、更に最近では、電装部品は、軽量化のみならず、小型化も要求されている。この小型化の要求に鑑み、磁気検出素子、磁気検出素子が搭載されたセンサ基板、及び信号処理基板を樹脂モールドにより一体化(アッセンブリ)した磁気センサ(例えば、特許文献3)も盛んに開発されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第4558036号公報
【特許文献2】特許第4273363号公報
【特許文献3】特開平11−211739号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、GMRセンサを高温環境下に曝される車両の機器(モータ)の測定に用いると、高温環境の温度によっては信号処理基板が損傷してしまう場合があった。
【0009】
また、小型化を目的として、単に、GMR素子、GMR素子が搭載されたセンサ基板、及び信号処理基板を一体化しようとすると、センサ基板と信号処理基板とを接続する信号接続線と、磁石回転子と、が非常に近接する場合がある。これに伴い、信号接続線に渦電流が発生してしまい、正確な回転角や回転速度を得ることができない虞があった。
【0010】
本発明は、このような事情に鑑みなされたものであり、軽量、小型でありながらも、高温環境下にある機器の測定に用いたとしても信号処理基板の損傷を低減することが可能であり、且つ渦電流の影響を低減することが可能なGMRセンサの提供を目的とする。
【課題を解決するための手段】
【0011】
この目的を達成するために創案された本発明は、回転磁界を生成する磁石回転子と、前記磁石回転子で生成された回転磁界の変化による磁気抵抗の変動を検出すると共に検出信号を出力するGMR素子が搭載されたセンサ基板と、前記GMR素子から出力された検出信号を処理する信号処理基板と、前記センサ基板と前記信号処理基板とを接続する信号接続線と、を備え、前記センサ基板、前記信号処理基板、及び前記信号接続線は、同一の樹脂筐体内に収納されると共に、前記磁石回転子は、機器の収納ケース内に収納されるGMRセンサであって、前記樹脂筐体は、前記収納ケースを貫通し、且つ一端側が前記磁石回転子の外周面に隣接しており、前記センサ基板は、前記収納ケース内に位置する前記樹脂筐体の一端側に配置され、前記信号処理基板は、前記収納ケース外に位置する前記樹脂筐体の他端側に配置され、前記収納ケース内に位置する前記信号接続線は、前記GMR素子を挟んで前記磁石回転子と反対側に位置するように配線されることを特徴とするGMRセンサである。
【0012】
前記樹脂筐体は、前記収納ケース内外にわたって前記磁石回転子の回転軸と平行な方向に伸びる中空部が形成され、前記中空部には、前記センサ基板、前記信号処理基板、及び前記信号接続線が収納されると良い。
【0013】
前記中空部を区画形成する壁部のうち、前記磁石回転子の外周面に隣接する位置の壁部が他の壁部に比べて薄く形成されており、前記GMR素子と前記磁石回転子との距離が短くされると良い。
【0014】
前記中空部は、前記センサ基板、前記信号処理基板、及び前記信号接続線が収納された後ポッティングされ、前記樹脂筐体に対する前記センサ基板、前記信号処理基板、及び前記信号接続線の位置関係が固定されると良い。
【0015】
前記信号接続線は、前記収納ケース外に位置する一端がクランク状に形成されていると良い。
【発明の効果】
【0016】
本発明によれば、軽量、小型でありながらも、高温環境下にある機器の測定に用いたとしても信号処理基板の損傷を低減することが可能であり、且つ渦電流の影響を低減することが可能である。
【図面の簡単な説明】
【0017】
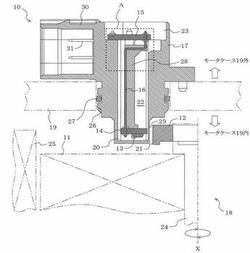
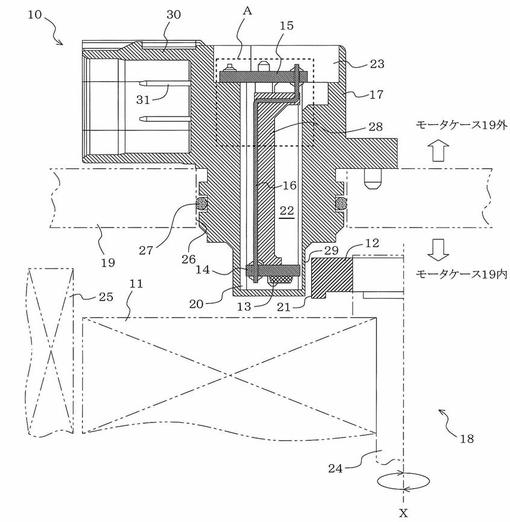
【図1】本発明の実施の形態に係るGMRセンサ示す断面図である。
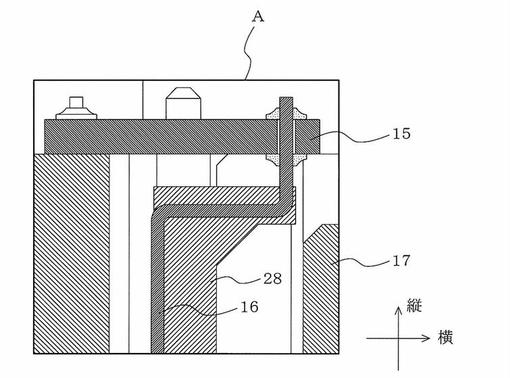
【図2】図1の部分拡大図であり、信号接続線と信号処理基板との接続方法を説明する図である。
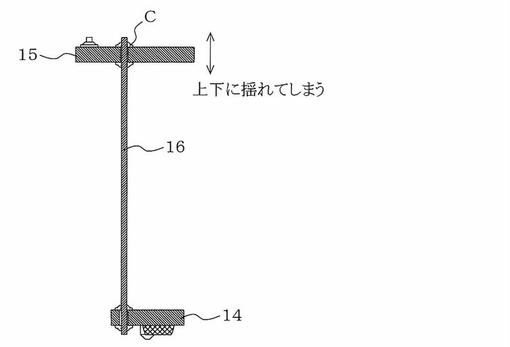
【図3】信号接続線と信号処理基板との接続方法の違いによって生じる問題点を説明する図である。
【発明を実施するための形態】
【0018】
以下、本発明の好適な実施の形態を添付図面にしたがって説明する。
【0019】
図1は、本発明の好適な実施の形態に係るGMRセンサを示す断面図である。
【0020】
図1に示すように、本実施の形態に係るGMRセンサ10は、回転磁界を生成する磁石回転子12と、磁石回転子12で生成された回転磁界の変化による磁気抵抗の変動を検出すると共に検出信号を出力するGMR素子13が搭載されたセンサ基板14と、GMR素子13から出力された検出信号を処理する信号処理基板15と、センサ基板14と信号処理基板15とを接続する信号接続線16と、を備え、センサ基板14、信号処理基板15、及び信号接続線16は、同一の樹脂筐体17内に収納されると共に、磁石回転子12は、機器の収納ケースとしてのモータケース19内に収納されたものである。本発明において、樹脂筐体17は、モータケース19を貫通し、且つ一端側が磁石回転子12の外周面に隣接しており、センサ基板14は、モータケース19内に位置する樹脂筐体17の一端側に配置され、信号処理基板15は、モータケース19外に位置する樹脂筐体17の他端側に配置され、モータケース19内に位置する信号接続線16は、GMR素子13を挟んで磁石回転子12と反対側に位置するように配線されることを特徴としている。
【0021】
以下に、一例として、本実施の形態に係るGMRセンサ10をモータのモータロータの回転角を検出するために用いた例を説明する。
【0022】
モータ18は、回転軸X上に配置されるモータシャフト24と、モータシャフト24に取り付けられたモータロータ11と、モータロータ11の外周側に配置されたモータステータ25と、これらを収納するモータケース19と、を有する。
【0023】
磁石回転子12は、その外周に沿ってN極とS極とが交互に配置されたリング状に形成されると共に、モータロータ11の回転軸Xを構成するモータシャフト24に一体的に固定される。この磁石回転子12は、モータロータ11の回転に伴ってモータシャフト24と一体に回転し、その放射方向に回転磁界を生成する。
【0024】
GMR素子13は、磁石回転子12で生成された回転磁界の変化に応じて抵抗が変動する磁気抵抗効果を利用して正弦波状に振幅が変化する検出信号を出力するものである。
【0025】
信号処理基板15は、GMR素子13から出力された検出信号を処理する信号処理回路を有している。本実施の形態においては、信号処理基板15は、GMR素子13から出力された検出信号の増幅を行ったり、検出信号に基づき演算を行ったり、又はその両方を行い、図示しないCPU又は専用ICへ処理信号を出力する。そして、CPU又は専用ICは、当該処理信号に基づき、磁石回転子12の回転角や回転速度を計算する。なお、本実施の形態において、信号処理基板15は、GMR素子13から出力された検出信号を処理し、CPU又は専用ICに処理信号を出力するのみとしたが、信号処理基板15自体に回転角や回転速度を計算する機能を持たせることも可能である。
【0026】
信号接続線16は、GMR素子13が搭載されたセンサ基板14と信号処理基板15との間で検出信号などの伝送を行うためのものであり、例えば、銅や銅合金などの金属からなる。
【0027】
樹脂筐体17は、モータケース19に形成された貫通孔26に挿入されると共にその貫通孔26にOリング27を介して取り付けられる。樹脂筐体17の内部には中空部22が形成されている。中空部22は、樹脂筐体17の内部におけるモータケース19内外にわたって磁石回転子12の回転軸Xと平行な方向に伸びる。中空部22は、樹脂製の端子ブロック28が収納されるとともに、端子ブロック28ごとポッティングされ、樹脂筐体17に対するセンサ基板14、信号処理基板15、及び信号接続線16の位置関係が固定される。
【0028】
この端子ブロック28には、信号接続線16が図示下側から図示上側にかけてインサートされており、図示下側に露出した信号接続線16の一端にセンサ基板14が接続されて固定され、図示上側に露出した信号接続線16の他端に信号処理基板15が接続されて固定される。
【0029】
この状態で端子ブロック28が中空部22に収納されることで、センサ基板14がモータケース19内に位置する中空部22(樹脂筐体17)の一端側20に配置され、信号処理基板15がモータケース19外に位置する中空部22(樹脂筐体17)の他端側23に配置され、信号接続線16がGMR素子13を挟んで磁石回転子12と反対側に位置するように配線される。
【0030】
このように、センサ基板14を、モータケース19内に位置する中空部22の一端側20に配置するのは、磁石回転子12とできるだけ近接した位置にGMR素子13を配置して、その検出感度を向上させるためである。
【0031】
特に、本実施の形態においては、中空部22を区画形成する壁部のうち、磁石回転子12の外周面21に隣接する位置の壁部29が他の壁部に比べて薄く形成されており、GMR素子13と磁石回転子12との距離が極力短くなるようにされ、検出感度の更なる向上及び強度の両立が図られている。
【0032】
一方、信号処理基板15を、モータケース19外に位置する中空部22の他端側23に配置するのは、温度が比較的低温となるモータケース19の外部に信号処理基板15を配置して、モータ18の駆動により発生した熱で信号処理基板15が高温化することによる誤作動を低減し、更には、当該高温化による信号処理基板15の損傷を低減するためである。
【0033】
ところで、GMR素子13と磁石回転子12との間に信号接続線16を配置すると、信号接続線16に発生する渦電流で回転磁界が変化し、正しい検出ができない場合がある。そこで、信号接続線16を、GMR素子13を挟んで磁石回転子12の反対側に位置するように配線している。
【0034】
また、図1の部分Aの拡大図である図2に示すように、信号接続線16は、一端が横方向に曲げられ、その後縦方向に曲げられて、信号処理基板15と接続されている。即ち、信号接続線16は、モータケース19外に位置する一端がクランク状に形成され、信号処理基板15と接続されている。このようにせずに、即ち、図3に示すように、信号接続線16をセンサ基板14から縦方向に直線状に信号処理基板15に接続した場合、例えば、エラストマ等の軟らかい部材で中空部22をポッティングすると、車両の振動等により、信号処理基板15が信号処理基板15と信号接続線16との接続部分Cを支点に上下方向に揺れて、信号処理基板15と信号接続線16とのはんだ付け部分にストレスがかかってしまう。この場合、はんだ付け部分における信号処理基板15と信号接続線16との接続が外れてしまう場合がある。これに対し、図2に示したように信号接続線16を信号処理基板15と接続することで、エラストマ等の軟らかい部材で中空部22をポッティングした場合であっても、車両の振動によるはんだ付け部分における信号処理基板15と信号接続線16との接続の外れを抑制することが可能である。
【0035】
また、樹脂筐体17は、外部からのケーブル等を接続するコネクタ30を有しており、このコネクタ30内には、信号処理基板15に接続されたコネクタピン31が設けられる。
【0036】
以上説明したGMRセンサ10は、レゾルバよりも軽いGMRセンサを用いているため軽量であり、また、センサ基板及び信号処理基板を磁石回転子12の回転軸Xに沿って配置されているため、小型である。
【0037】
そして、GMRセンサ10は、センサ基板14がモータケース19内に位置する中空部22(樹脂筐体17)の一端側20に配置され、信号処理基板15がモータケース19外に位置する中空部22(樹脂筐体17)の他端側23に配置されているため、モータ18の駆動により発生した熱で信号処理基板15が誤動作、更には、損傷するのを低減することができる。
【0038】
また、GMRセンサ10によれば、信号接続線16がGMR素子13を挟んで磁石回転子12と反対側に位置するように配線されるため、信号接続線16に発生する渦電流で回転磁界が変化するのを低減し、正確な回転速度や回転角を得ることができる。
【0039】
従って、本発明によれば、軽量、小型でありながらも、高温環境下にある機器の測定をすることが可能であり、且つ渦電流の影響を低減することが可能である。
【符号の説明】
【0040】
10 GMRセンサ
11 モータロータ
12 磁石回転子
13 GMR素子
14 センサ基板
15 信号処理基板
16 信号接続線
17 樹脂筐体
18 モータ
19 モータケース
20 一端側
21 外周面
22 中空部
23 他端側
24 モータシャフト
25 モータステータ
26 貫通孔
27 Oリング
28 端子ブロック
29 壁部
30 コネクタ
31 コネクタピン
C 接続部分
X 回転軸
【技術分野】
【0001】
本発明は、回転体と同軸で回転する磁石回転子で生成された回転磁界の変化による磁気抵抗の変動を検出して、回転体の回転速度や回転角などを検出するGMR(Giant Magneto−Resistive:巨大磁気抵抗)センサに関するものである。
【背景技術】
【0002】
従来より、例えば、モータの回転角を検出するための回転センサとして、モータロータなどの回転体と同軸で回転する励磁コイルと、モータステータなどの固定体に取り付けられると共に回転体の回転軸周りに配置された複数の検出コイルと、からなり、回転角に対して振幅が変化する複数相の出力信号から回転角を検出するレゾルバがある(例えば、特許文献1)。
【0003】
ところで、近年、著しい進歩を遂げている、例えば、ハイブリッド車、電気自動車などのエコカーにおいては、省エネ性能を向上させるべく、全ての電装部品に対して軽量化が要求されている。しかし、前述したレゾルバは、その重量が300g程度以上であり、軽量化には不向きであった。
【0004】
そこで、軽量化の要求に鑑み、その重量が100g程度以下と前述したレゾルバよりも軽量なGMRセンサを、モータの回転角を検出するために用いようとする試みがなされている(例えば、特許文献2)。
【0005】
GMRセンサは、GMR素子を用いた回転センサであり、磁石回転子で生成された回転磁界の変化で磁気抵抗が変動する磁気抵抗効果を利用して回転角や回転速度を検出するものである。
【0006】
また、更に最近では、電装部品は、軽量化のみならず、小型化も要求されている。この小型化の要求に鑑み、磁気検出素子、磁気検出素子が搭載されたセンサ基板、及び信号処理基板を樹脂モールドにより一体化(アッセンブリ)した磁気センサ(例えば、特許文献3)も盛んに開発されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第4558036号公報
【特許文献2】特許第4273363号公報
【特許文献3】特開平11−211739号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、GMRセンサを高温環境下に曝される車両の機器(モータ)の測定に用いると、高温環境の温度によっては信号処理基板が損傷してしまう場合があった。
【0009】
また、小型化を目的として、単に、GMR素子、GMR素子が搭載されたセンサ基板、及び信号処理基板を一体化しようとすると、センサ基板と信号処理基板とを接続する信号接続線と、磁石回転子と、が非常に近接する場合がある。これに伴い、信号接続線に渦電流が発生してしまい、正確な回転角や回転速度を得ることができない虞があった。
【0010】
本発明は、このような事情に鑑みなされたものであり、軽量、小型でありながらも、高温環境下にある機器の測定に用いたとしても信号処理基板の損傷を低減することが可能であり、且つ渦電流の影響を低減することが可能なGMRセンサの提供を目的とする。
【課題を解決するための手段】
【0011】
この目的を達成するために創案された本発明は、回転磁界を生成する磁石回転子と、前記磁石回転子で生成された回転磁界の変化による磁気抵抗の変動を検出すると共に検出信号を出力するGMR素子が搭載されたセンサ基板と、前記GMR素子から出力された検出信号を処理する信号処理基板と、前記センサ基板と前記信号処理基板とを接続する信号接続線と、を備え、前記センサ基板、前記信号処理基板、及び前記信号接続線は、同一の樹脂筐体内に収納されると共に、前記磁石回転子は、機器の収納ケース内に収納されるGMRセンサであって、前記樹脂筐体は、前記収納ケースを貫通し、且つ一端側が前記磁石回転子の外周面に隣接しており、前記センサ基板は、前記収納ケース内に位置する前記樹脂筐体の一端側に配置され、前記信号処理基板は、前記収納ケース外に位置する前記樹脂筐体の他端側に配置され、前記収納ケース内に位置する前記信号接続線は、前記GMR素子を挟んで前記磁石回転子と反対側に位置するように配線されることを特徴とするGMRセンサである。
【0012】
前記樹脂筐体は、前記収納ケース内外にわたって前記磁石回転子の回転軸と平行な方向に伸びる中空部が形成され、前記中空部には、前記センサ基板、前記信号処理基板、及び前記信号接続線が収納されると良い。
【0013】
前記中空部を区画形成する壁部のうち、前記磁石回転子の外周面に隣接する位置の壁部が他の壁部に比べて薄く形成されており、前記GMR素子と前記磁石回転子との距離が短くされると良い。
【0014】
前記中空部は、前記センサ基板、前記信号処理基板、及び前記信号接続線が収納された後ポッティングされ、前記樹脂筐体に対する前記センサ基板、前記信号処理基板、及び前記信号接続線の位置関係が固定されると良い。
【0015】
前記信号接続線は、前記収納ケース外に位置する一端がクランク状に形成されていると良い。
【発明の効果】
【0016】
本発明によれば、軽量、小型でありながらも、高温環境下にある機器の測定に用いたとしても信号処理基板の損傷を低減することが可能であり、且つ渦電流の影響を低減することが可能である。
【図面の簡単な説明】
【0017】
【図1】本発明の実施の形態に係るGMRセンサ示す断面図である。
【図2】図1の部分拡大図であり、信号接続線と信号処理基板との接続方法を説明する図である。
【図3】信号接続線と信号処理基板との接続方法の違いによって生じる問題点を説明する図である。
【発明を実施するための形態】
【0018】
以下、本発明の好適な実施の形態を添付図面にしたがって説明する。
【0019】
図1は、本発明の好適な実施の形態に係るGMRセンサを示す断面図である。
【0020】
図1に示すように、本実施の形態に係るGMRセンサ10は、回転磁界を生成する磁石回転子12と、磁石回転子12で生成された回転磁界の変化による磁気抵抗の変動を検出すると共に検出信号を出力するGMR素子13が搭載されたセンサ基板14と、GMR素子13から出力された検出信号を処理する信号処理基板15と、センサ基板14と信号処理基板15とを接続する信号接続線16と、を備え、センサ基板14、信号処理基板15、及び信号接続線16は、同一の樹脂筐体17内に収納されると共に、磁石回転子12は、機器の収納ケースとしてのモータケース19内に収納されたものである。本発明において、樹脂筐体17は、モータケース19を貫通し、且つ一端側が磁石回転子12の外周面に隣接しており、センサ基板14は、モータケース19内に位置する樹脂筐体17の一端側に配置され、信号処理基板15は、モータケース19外に位置する樹脂筐体17の他端側に配置され、モータケース19内に位置する信号接続線16は、GMR素子13を挟んで磁石回転子12と反対側に位置するように配線されることを特徴としている。
【0021】
以下に、一例として、本実施の形態に係るGMRセンサ10をモータのモータロータの回転角を検出するために用いた例を説明する。
【0022】
モータ18は、回転軸X上に配置されるモータシャフト24と、モータシャフト24に取り付けられたモータロータ11と、モータロータ11の外周側に配置されたモータステータ25と、これらを収納するモータケース19と、を有する。
【0023】
磁石回転子12は、その外周に沿ってN極とS極とが交互に配置されたリング状に形成されると共に、モータロータ11の回転軸Xを構成するモータシャフト24に一体的に固定される。この磁石回転子12は、モータロータ11の回転に伴ってモータシャフト24と一体に回転し、その放射方向に回転磁界を生成する。
【0024】
GMR素子13は、磁石回転子12で生成された回転磁界の変化に応じて抵抗が変動する磁気抵抗効果を利用して正弦波状に振幅が変化する検出信号を出力するものである。
【0025】
信号処理基板15は、GMR素子13から出力された検出信号を処理する信号処理回路を有している。本実施の形態においては、信号処理基板15は、GMR素子13から出力された検出信号の増幅を行ったり、検出信号に基づき演算を行ったり、又はその両方を行い、図示しないCPU又は専用ICへ処理信号を出力する。そして、CPU又は専用ICは、当該処理信号に基づき、磁石回転子12の回転角や回転速度を計算する。なお、本実施の形態において、信号処理基板15は、GMR素子13から出力された検出信号を処理し、CPU又は専用ICに処理信号を出力するのみとしたが、信号処理基板15自体に回転角や回転速度を計算する機能を持たせることも可能である。
【0026】
信号接続線16は、GMR素子13が搭載されたセンサ基板14と信号処理基板15との間で検出信号などの伝送を行うためのものであり、例えば、銅や銅合金などの金属からなる。
【0027】
樹脂筐体17は、モータケース19に形成された貫通孔26に挿入されると共にその貫通孔26にOリング27を介して取り付けられる。樹脂筐体17の内部には中空部22が形成されている。中空部22は、樹脂筐体17の内部におけるモータケース19内外にわたって磁石回転子12の回転軸Xと平行な方向に伸びる。中空部22は、樹脂製の端子ブロック28が収納されるとともに、端子ブロック28ごとポッティングされ、樹脂筐体17に対するセンサ基板14、信号処理基板15、及び信号接続線16の位置関係が固定される。
【0028】
この端子ブロック28には、信号接続線16が図示下側から図示上側にかけてインサートされており、図示下側に露出した信号接続線16の一端にセンサ基板14が接続されて固定され、図示上側に露出した信号接続線16の他端に信号処理基板15が接続されて固定される。
【0029】
この状態で端子ブロック28が中空部22に収納されることで、センサ基板14がモータケース19内に位置する中空部22(樹脂筐体17)の一端側20に配置され、信号処理基板15がモータケース19外に位置する中空部22(樹脂筐体17)の他端側23に配置され、信号接続線16がGMR素子13を挟んで磁石回転子12と反対側に位置するように配線される。
【0030】
このように、センサ基板14を、モータケース19内に位置する中空部22の一端側20に配置するのは、磁石回転子12とできるだけ近接した位置にGMR素子13を配置して、その検出感度を向上させるためである。
【0031】
特に、本実施の形態においては、中空部22を区画形成する壁部のうち、磁石回転子12の外周面21に隣接する位置の壁部29が他の壁部に比べて薄く形成されており、GMR素子13と磁石回転子12との距離が極力短くなるようにされ、検出感度の更なる向上及び強度の両立が図られている。
【0032】
一方、信号処理基板15を、モータケース19外に位置する中空部22の他端側23に配置するのは、温度が比較的低温となるモータケース19の外部に信号処理基板15を配置して、モータ18の駆動により発生した熱で信号処理基板15が高温化することによる誤作動を低減し、更には、当該高温化による信号処理基板15の損傷を低減するためである。
【0033】
ところで、GMR素子13と磁石回転子12との間に信号接続線16を配置すると、信号接続線16に発生する渦電流で回転磁界が変化し、正しい検出ができない場合がある。そこで、信号接続線16を、GMR素子13を挟んで磁石回転子12の反対側に位置するように配線している。
【0034】
また、図1の部分Aの拡大図である図2に示すように、信号接続線16は、一端が横方向に曲げられ、その後縦方向に曲げられて、信号処理基板15と接続されている。即ち、信号接続線16は、モータケース19外に位置する一端がクランク状に形成され、信号処理基板15と接続されている。このようにせずに、即ち、図3に示すように、信号接続線16をセンサ基板14から縦方向に直線状に信号処理基板15に接続した場合、例えば、エラストマ等の軟らかい部材で中空部22をポッティングすると、車両の振動等により、信号処理基板15が信号処理基板15と信号接続線16との接続部分Cを支点に上下方向に揺れて、信号処理基板15と信号接続線16とのはんだ付け部分にストレスがかかってしまう。この場合、はんだ付け部分における信号処理基板15と信号接続線16との接続が外れてしまう場合がある。これに対し、図2に示したように信号接続線16を信号処理基板15と接続することで、エラストマ等の軟らかい部材で中空部22をポッティングした場合であっても、車両の振動によるはんだ付け部分における信号処理基板15と信号接続線16との接続の外れを抑制することが可能である。
【0035】
また、樹脂筐体17は、外部からのケーブル等を接続するコネクタ30を有しており、このコネクタ30内には、信号処理基板15に接続されたコネクタピン31が設けられる。
【0036】
以上説明したGMRセンサ10は、レゾルバよりも軽いGMRセンサを用いているため軽量であり、また、センサ基板及び信号処理基板を磁石回転子12の回転軸Xに沿って配置されているため、小型である。
【0037】
そして、GMRセンサ10は、センサ基板14がモータケース19内に位置する中空部22(樹脂筐体17)の一端側20に配置され、信号処理基板15がモータケース19外に位置する中空部22(樹脂筐体17)の他端側23に配置されているため、モータ18の駆動により発生した熱で信号処理基板15が誤動作、更には、損傷するのを低減することができる。
【0038】
また、GMRセンサ10によれば、信号接続線16がGMR素子13を挟んで磁石回転子12と反対側に位置するように配線されるため、信号接続線16に発生する渦電流で回転磁界が変化するのを低減し、正確な回転速度や回転角を得ることができる。
【0039】
従って、本発明によれば、軽量、小型でありながらも、高温環境下にある機器の測定をすることが可能であり、且つ渦電流の影響を低減することが可能である。
【符号の説明】
【0040】
10 GMRセンサ
11 モータロータ
12 磁石回転子
13 GMR素子
14 センサ基板
15 信号処理基板
16 信号接続線
17 樹脂筐体
18 モータ
19 モータケース
20 一端側
21 外周面
22 中空部
23 他端側
24 モータシャフト
25 モータステータ
26 貫通孔
27 Oリング
28 端子ブロック
29 壁部
30 コネクタ
31 コネクタピン
C 接続部分
X 回転軸
【特許請求の範囲】
【請求項1】
回転磁界を生成する磁石回転子と、
前記磁石回転子で生成された回転磁界の変化による磁気抵抗の変動を検出すると共に検出信号を出力するGMR素子が搭載されたセンサ基板と、
前記GMR素子から出力された検出信号を処理する信号処理基板と、
前記センサ基板と前記信号処理基板とを接続する信号接続線と、
を備え、
前記センサ基板、前記信号処理基板、及び前記信号接続線は、同一の樹脂筐体内に収納されると共に、前記磁石回転子は、機器の収納ケース内に収納されるGMRセンサであって、
前記樹脂筐体は、前記収納ケースを貫通し、且つ一端側が前記磁石回転子の外周面に隣接しており、
前記センサ基板は、前記収納ケース内に位置する前記樹脂筐体の一端側に配置され、
前記信号処理基板は、前記収納ケース外に位置する前記樹脂筐体の他端側に配置され、
前記収納ケース内に位置する前記信号接続線は、前記GMR素子を挟んで前記磁石回転子と反対側に位置するように配線されることを特徴とするGMRセンサ。
【請求項2】
前記樹脂筐体は、前記収納ケース内外にわたって前記磁石回転子の回転軸と平行な方向に伸びる中空部が形成され、
前記中空部には、前記センサ基板、前記信号処理基板、及び前記信号接続線が収納される請求項1に記載のGMRセンサ。
【請求項3】
前記中空部を区画形成する壁部のうち、前記磁石回転子の外周面に隣接する位置の壁部が他の壁部に比べて薄く形成されており、前記GMR素子と前記磁石回転子との距離が短くされる請求項2に記載のGMRセンサ。
【請求項4】
前記中空部は、前記センサ基板、前記信号処理基板、及び前記信号接続線が収納された後ポッティングされ、前記樹脂筐体に対する前記センサ基板、前記信号処理基板、及び前記信号接続線の位置関係が固定される請求項2又は3に記載のGMRセンサ。
【請求項5】
前記信号接続線は、前記収納ケース外に位置する一端がクランク状に形成されている請求項1〜4のいずれかに記載のGMRセンサ。
【請求項1】
回転磁界を生成する磁石回転子と、
前記磁石回転子で生成された回転磁界の変化による磁気抵抗の変動を検出すると共に検出信号を出力するGMR素子が搭載されたセンサ基板と、
前記GMR素子から出力された検出信号を処理する信号処理基板と、
前記センサ基板と前記信号処理基板とを接続する信号接続線と、
を備え、
前記センサ基板、前記信号処理基板、及び前記信号接続線は、同一の樹脂筐体内に収納されると共に、前記磁石回転子は、機器の収納ケース内に収納されるGMRセンサであって、
前記樹脂筐体は、前記収納ケースを貫通し、且つ一端側が前記磁石回転子の外周面に隣接しており、
前記センサ基板は、前記収納ケース内に位置する前記樹脂筐体の一端側に配置され、
前記信号処理基板は、前記収納ケース外に位置する前記樹脂筐体の他端側に配置され、
前記収納ケース内に位置する前記信号接続線は、前記GMR素子を挟んで前記磁石回転子と反対側に位置するように配線されることを特徴とするGMRセンサ。
【請求項2】
前記樹脂筐体は、前記収納ケース内外にわたって前記磁石回転子の回転軸と平行な方向に伸びる中空部が形成され、
前記中空部には、前記センサ基板、前記信号処理基板、及び前記信号接続線が収納される請求項1に記載のGMRセンサ。
【請求項3】
前記中空部を区画形成する壁部のうち、前記磁石回転子の外周面に隣接する位置の壁部が他の壁部に比べて薄く形成されており、前記GMR素子と前記磁石回転子との距離が短くされる請求項2に記載のGMRセンサ。
【請求項4】
前記中空部は、前記センサ基板、前記信号処理基板、及び前記信号接続線が収納された後ポッティングされ、前記樹脂筐体に対する前記センサ基板、前記信号処理基板、及び前記信号接続線の位置関係が固定される請求項2又は3に記載のGMRセンサ。
【請求項5】
前記信号接続線は、前記収納ケース外に位置する一端がクランク状に形成されている請求項1〜4のいずれかに記載のGMRセンサ。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−2993(P2013−2993A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−135122(P2011−135122)
【出願日】平成23年6月17日(2011.6.17)
【出願人】(000005120)日立電線株式会社 (3,358)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月17日(2011.6.17)
【出願人】(000005120)日立電線株式会社 (3,358)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]