
GNSSデバイスにおける衛星信号マルチパス緩和
【課題】デバイスにおける衛星信号マルチパス緩和の提供。
【解決手段】GNSSデバイスにおけるマルチパス誤差の影響を緩和する方法であって、方法は、GNSS衛星の第一のセットにおける衛星から信号を受信することと、少なくとも1つの画像センサから画像データを受信することと、少なくとも1つの配向センサから配向データを受信することと、画像データに基づいて妨害データを決定することと、妨害データ、配向データ、およびGNSS衛星位置データに基づいて、妨害領域に対する衛星の第二のセットにおけるGNSS衛星の位置を決定することと、GNSSデバイスの位置を決定することであって、GNSSデバイスの位置を決定することは、GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つからの信号と、妨害領域に対する第二のセットにおける少なくとも1つの衛星の位置とに基づくこととを含む、方法。
【解決手段】GNSSデバイスにおけるマルチパス誤差の影響を緩和する方法であって、方法は、GNSS衛星の第一のセットにおける衛星から信号を受信することと、少なくとも1つの画像センサから画像データを受信することと、少なくとも1つの配向センサから配向データを受信することと、画像データに基づいて妨害データを決定することと、妨害データ、配向データ、およびGNSS衛星位置データに基づいて、妨害領域に対する衛星の第二のセットにおけるGNSS衛星の位置を決定することと、GNSSデバイスの位置を決定することであって、GNSSデバイスの位置を決定することは、GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つからの信号と、妨害領域に対する第二のセットにおける少なくとも1つの衛星の位置とに基づくこととを含む、方法。
【発明の詳細な説明】
【技術分野】
【0001】
(分野)
本発明は、全地球的航法衛星システム(GNSS)デバイスにおける間接的衛星信号からのマルチパス誤差の影響を緩和することに関する。
【0002】
(関連出願の相互参照)
本出願は、2010年11月24日に出願された米国仮出願第61/417,209号に対する利益を主張し、先の出願は、本明細書において参照によって援用される。
【背景技術】
【0003】
(関連技術)
GPSまたはGLONASS(本明細書において以降、集合的に「GNSS」と呼ばれる)のような全地球的航法衛星システムを使用するナビゲーション受信器は、受信器の位置の高精度な決定を可能にする。衛星信号は、擬似ランダム二進符号によって変調されるキャリア高調波信号を含み得、キャリア高調波信号は、受信側において、ローカル基準クロックに対する遅延を測定するために使用され得る。これらの遅延の測定値は、受信器と衛星との間の擬似距離を決定するために使用され得る。受信器のローカルクロックが衛星内蔵クロックと異なるため、擬似距離は本来の幾何学的な距離ではない。視界内の衛星の数が4つ以上の場合、次に、測定された擬似距離は、受信器のクロックオフセットを補うとともにベクターX=(x、y、z)Tによって表されるようなユーザの単点の位置を決定するために処理され得る。
【0004】
GNSS技術の測位精度は、遅延測定値の精度に直接依存する。測定値誤差の周知の源は、マルチパス誤差による。マルチパス誤差は、受信アンテナの近隣に位置する表面からの無線信号の反射によってもたらされる。アンテナは、衛星から受信器への最短経路を通る直接信号と、間接的な経路をたどる反射された信号との双方を受信する。アンテナでの2つの(またはそれより多くの)信号の組み合わせは、未加工測定値の歪曲に繋がる。マルチパス誤差は、擬似距離およびキャリア位相測定値の双方に影響を及ぼす。マルチパスの空間相関は、アンテナに対する反射表面の位置に依存する。アンテナの上部に到達する反射を生成する表面に対して、キャリア位相マルチパスは、わずか数デシメートル離れたところに位置するアンテナに対して実質的に相関されていない場合がある。
【0005】
GNSS衛星からの信号に基づいて位置を決定することと、それらの信号に関連する潜在的な誤差のさらに詳細な記述は、本発明の譲受人に譲渡された2008年2月15日に出願された米国特許出願第12/070,333号と、2009年1月27に出願された米国特許出願第12/360,808号とにおいて公開され、これらの出願のそれぞれは、その全内容が全ての目的のために本明細書において参照によって援用される。
【0006】
従って、マルチパス誤差の影響を緩和する高精度の、携帯式の、完全なハンドヘルドGNSSデバイスが望まれる。
【発明の概要】
【課題を解決するための手段】
【0007】
GNSS衛星からの信号が受信される。画像センサからの画像データが受信される。配向センサからの配向データが受信される。配向データは、画像センサの配向を表現する。妨害データが画像データに基づいて決定される。妨害データは、妨害領域を含み、妨害領域は、その領域における空が構造物によって妨害されていることを示す。配向データ、妨害データ、およびGNSS衛星位置データに基づいて、妨害領域に対するGNSS衛星の位置が決定される。GNSSデバイスの位置は、GNSS衛星のうちのいくつかからの信号と、妨害領域に対するGNSS衛星の位置とに基づいて決定される。
【0008】
1つの例において、妨害領域内に位置する衛星からの信号は、GNSSデバイスの位置を決定するときに除外される。
【0009】
別の例において、信号が妨害領域に位置する衛星からであることは、これらの衛星からの信号が疑わしくない衛星と比べてマルチパス誤差を被る確率がより高いことを示す。
【0010】
本発明は例えば以下を提供する。
(項目1) GNSSデバイスにおけるマルチパス誤差の影響を緩和する方法であって、該方法は、
GNSS衛星の第一のセットにおける衛星から信号を受信することと、
少なくとも1つの画像センサから画像データを受信することと、
少なくとも1つの配向センサから配向データを受信することと、
該画像データに基づいて妨害データを決定することであって、該妨害データは妨害領域を示す、ことと、
該妨害データ、該配向データ、およびGNSS衛星位置データに基づいて、該妨害領域に対する衛星の第二のセットにおけるGNSS衛星の位置を決定することであって、該GNSS衛星位置データは、該GNSS衛星の第二のセットにおける衛星の位置を表現する、ことと、
該GNSSデバイスの位置を決定することであって、該GNSSデバイスの位置を決定することは、該GNSS衛星の第一のセットにおける衛生のうちの少なくとも1つからの信号と、該妨害領域に対する該第二のセットにおける少なくとも1つの衛星の位置とに基づき、該GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つは、該GNSS衛星の第二のセットにもある、ことと
を含む、方法。
(項目2) 少なくとも1つの衛星が、その位置が上記妨害領域内にある場合に、妨害された衛星であることを決定することをさらに含み、上記GNSSデバイスの位置を決定することは、該少なくとも1つの妨害された衛星からの信号を除外することをさらに含む、上記項目に記載の方法。
(項目3) 少なくとも1つの衛星が、上記妨害領域に対するその衛星の位置がマルチパス閾値より高いマルチパス誤差に対応する場合に、疑わしい衛星であることを決定することをさらに含み、上記GNSSデバイスの位置を決定することは、該少なくとも1つの疑わしい衛星からの信号を除外すること、または該信号の重み付けの比率を下げることをさらに含む、上記項目のいずれか一項に記載の方法。
(項目4) 上記画像データは、異なる配向における上記画像センサから受信された画像データの組み合わせである、上記項目のいずれか一項に記載の方法。
(項目5) GNSS衛星の第一のセットにおける衛星から信号を受信することと、
少なくとも1つの画像センサから画像データを受信することと、
少なくとも1つの配向センサから配向データを受信することと、
該画像データに基づいて妨害データを決定することであって、該妨害データは妨害領域を示す、ことと、
該妨害データ、該配向データ、およびGNSS衛星位置データに基づいて、該妨害領域に対する衛星の第二のセットにおけるGNSS衛星の位置を決定することであって、該GNSS衛星位置データは、該GNSS衛星の第二のセットにおける衛星の位置を表現する、ことと、
GNSSデバイスの位置を決定することであって、該GNSSデバイスの位置を決定することは、該GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つからの信号と、該妨害領域に対する該第二のセットにおける少なくとも1つの衛星の位置とに基づき、該GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つは、該GNSS衛星の第二のセットにもある、ことと
を行うためのコンピュータ実行可能命令を記憶する、コンピュータ読み取り可能記憶媒体。
(項目6) 少なくとも1つの衛星が、その位置が上記妨害領域内にある場合に、妨害された衛星である決定するためのコンピュータ実行可能命令をさらに記憶し、上記GNSSデバイスの位置を決定することは、該少なくとも1つの妨害された衛星からの信号を除外することをさらに含む、上記項目に記載のコンピュータ読み取り可能記憶媒体。
(項目7) 少なくとも1つの衛星が、上記妨害領域に対するその衛星の位置がマルチパス閾値より高いマルチパス誤差に対応する場合に、疑わしい衛星であることを決定するためのコンピュータ実行可能命令をさらに記憶し、上記GNSSデバイスの位置を決定することは、該少なくとも1つの疑わしい衛星からの信号を除外することまたは重み付けの比率を下げることをさらに含む、上記項目のいずれか一項に記載のコンピュータ読み取り可能記憶媒体。
(項目8) 上記画像データは、異なる配向における上記画像センサから受信された画像データの組み合わせである、上記項目のいずれか一項に記載のコンピュータ読み取り可能記憶媒体。
【0011】
(摘要)
GNSSデバイスにおけるマルチパス誤差の影響を緩和する方法が提供される。GNSS衛星からの信号が受信される。画像センサからの画像データが受信される。配向センサからの配向データが受信される。配向データは、画像センサの配向を表現する。妨害データが画像データに基づいて決定される。妨害データは、妨害領域を含み、妨害領域は、その領域における空が構造物によって妨害されていることを示す。配向データ、妨害データ、およびGNSS衛星位置データに基づいて、妨害領域に対するGNSS衛星の位置が決定される。GNSSデバイスの位置は、GNSS衛星のうちのいくつかからの信号と、妨害領域に対するGNSS衛星の位置とに基づいて決定され得る。
【図面の簡単な説明】
【0012】
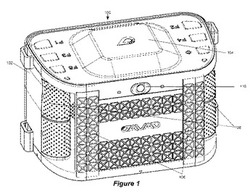
【図1】図1は、本発明の実施形態に従ったハンドヘルドGNSSデバイスの斜視図を描写する。
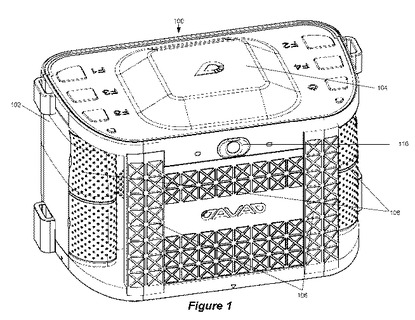
【図2】図2は、本発明の実施形態に従ったハンドヘルドGNSSデバイスの別の斜視図を描写する。
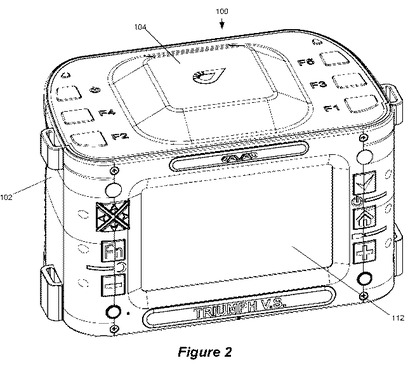
【図3】図3は、本発明の実施形態に従ったハンドヘルドGNSSデバイスの別の斜視図を描写する。
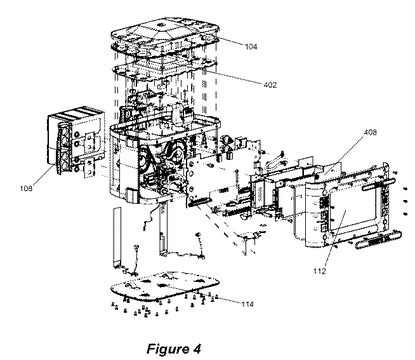
【図4】図4は、本発明の実施形態に従った、カメラのビューファインダを含むハンドヘルドGNSSデバイスの分解図を描写する。
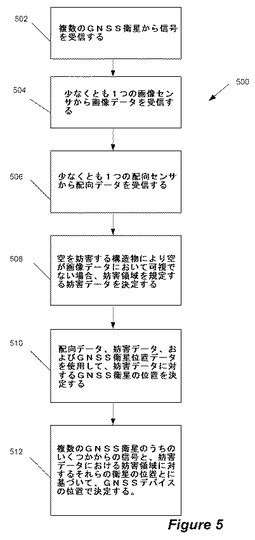
【図5】図5は、本発明の実施形態に従った、ハンドヘルドGNSSデバイスの位置を決定する場合にマルチパス誤差を緩和する方法のフローチャートを描写する。
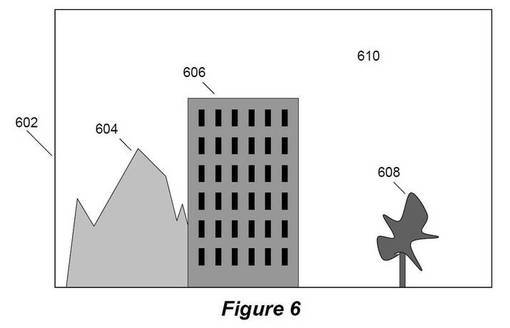
【図6】図6は、本発明の実施形態に従った、ハンドヘルドGNSSデバイスの位置を決定する場合にマルチパス誤差を緩和するための方法のステップに従って受信された画像データから生成された画像を表す。
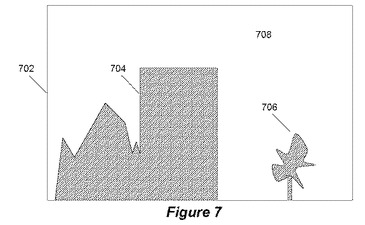
【図7】図7は、本発明の実施形態に従った、ハンドヘルドGNSSデバイスの位置を決定する場合にマルチパス誤差を緩和する方法のステップに従って生成された妨害データから生成された画像を表す。
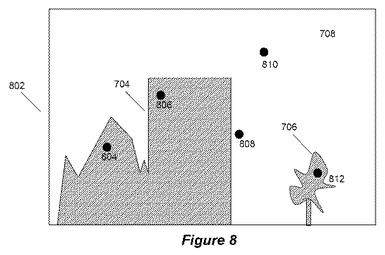
【図8】図8は、本発明の実施形態に従った、ハンドヘルドGNSSデバイスの位置を決定する場合にマルチパス誤差を緩和する方法のステップに従って生成された妨害データから生成された画像におけるGNSS衛星の位置を表す。
【図9】図9は、カメラの3つの異なる配向に対する画像データから生成された画像を表す。
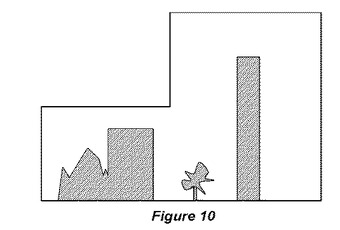
【図10】図10は、カメラの3つの配向に対する画像データから共に縫合された画像データから生成された妨害データを表す画像を表す。
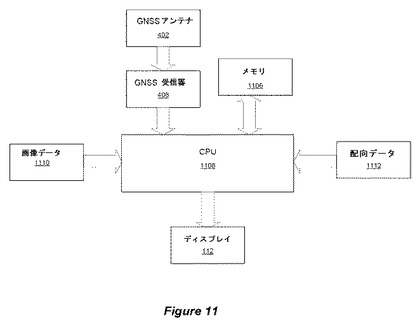
【図11】図11は、本発明の実施形態に従った、ハンドヘルドGNSSデバイスの様々なコンポーネント間の関係を示す論理図を描写する。
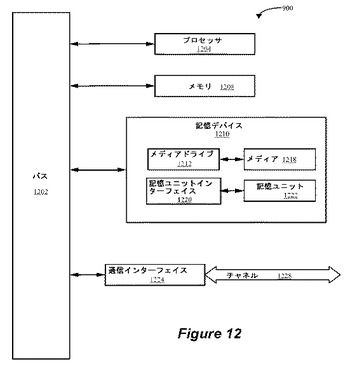
【図12】図12は、特定の実施形態において処理機能の一部またはすべてを実装するために使用され得る典型的なコンピューティングシステムを描写する。
【発明を実施するための形態】
【0013】
以下の記述において、以下の記述の一部を形成し、本発明のいくつかの実施形態を描写する添付の図面に参照がなされる。他の実施形態が使用され得、本発明の範囲から逸脱することなく構造的および動作的な変更がなされ得ることが理解される。異なる図面における同じ参照記号の使用は、同様または同一アイテムを示す。
【0014】
以下の記述は、当業者が様々な実施形態を生成し使用することを可能にするために提供されている。特定のデバイス、技法、および用途の記述は、例としてのみ提供されている。本明細書において記述されている例への様々な改変は、当業者に明白であり、本明細書において規定される一般的な原理は、特許請求される本発明の精神および範囲から逸脱することなく他の例および用途に適用され得る。従って、様々な実施形態は、本明細書において記述され、示される例に限定されることが意図されず、特許請求と一貫した範囲が与えられる。
【0015】
図1は、例示的なハンドヘルドGNSSデバイス100を描写する。ハンドヘルドGNSSデバイス100は、単一の筐体102を使用する。いくつかのGNSS要素が筐体102に組み込まれ、GNSS要素は、筐体内にあるか、または筐体に堅固に装着されている。堅固に装着された要素は取り外し可能であり得る。筐体102は、ユーザが典型的なカメラを保持する方法と同様にハンドヘルドGNSSデバイス100を保持することを可能にする。1つの例において、筐体102は、GNSSアンテナ402(図4に例示的な分解図で示されている)を覆うために、GNSSアンテナカバー104を含み得る。GNSSアンテナ402は、複数のGNSS衛星によって送信され、ハンドヘルドGNSSデバイス100によって位置を決定するために使用される信号を受信し得る。GNSSアンテナ402は筐体102に組み込まれ得、筐体102内のGNSSアンテナカバー104の下にある。
【0016】
1つの例において、GNSSアンテナ402は、少なくとも4つのGNSS衛星によって送信された信号を受信し得る。図1によって示される例において、GNSSアンテナカバー104は、ハンドヘルドGNSSデバイス100の上面に位置する。
【0017】
ハンドヘルドGNSSデバイス100は、少なくとも1つのハンドグリップ108をさらに含み得る。図1に示される例において、2つのハンドグリップ108が筐体102に組み込まれている。ハンドグリップ108は、快適性のため、およびユーザの手の滑りを低減するためにゴム材料で覆われ得る。
【0018】
前部カメラレンズ110がハンドヘルドGNSSデバイス100の前面に位置する。画像センサ(図示なし)がハンドヘルドGNSSデバイス100内に装着され、画像センサがハンドヘルドGNSSデバイス100の前方の情景の画像データを生成するために前部カメラレンズ110と協働することを可能にする。第二の底面カメラレンズ116が、図3に示される例において、ハンドヘルドGNSSデバイス100の底面に位置し得る。含まれるカメラは、スチルカメラまたはビデオカメラであり得る。
【0019】
図2に示されるように、ハンドヘルドGNSSデバイス100は、デバイスを位置づけすることにおいてユーザを補助するために、情報を表示するためのディスプレイ112をさらに含み得る。ディスプレイ112は、液晶(LCD)ディスプレイ、発光ダイオード(LED)ディスプレイなどのような任意の電子ディスプレイであり得る。このようなディスプレイデバイスは、当業者に周知であり、任意のこのようなデバイスが使用され得る。図2によって示される例において、ディスプレイ112は、ハンドヘルドGNSSデバイス100の筐体102の背面に組み込まれている。
【0020】
ハンドヘルドGNSSデバイス100は、スチル画像またはビデオを記録するためのカメラをさらに含み得る。このような記録デバイスは、当業者に周知であり、任意のこのようなデバイスが使用され得る。図1に描写される例において、前部カメラレンズ110がハンドヘルドGNSSデバイス100の前面に位置する。1つの例において、ディスプレイ112は、前部カメラレンズ110の出力を表示するために使用され得る。
【0021】
図3を参照すると、ハンドヘルドGNSSデバイス100はまた、観察、およびハンドヘルドGNSSデバイス100の関心地点マーカーとの整合のために、ハンドヘルドGNSSデバイス100の底面において第二の底面カメラレンズ116を含み得る。関心地点マーカーの画像はまた、GNSS受信器808が正確に装着されたことを確実にするため、または記録されたカメラ情報に基づいて後に不整合を補正するためにGNSSデータと共に記録され得る。底面カメラレンズ116、および不整合を補正するための底面カメラレンズの使用の記述は、本出願の譲受人に譲渡された、2009年9月30日に出願された米国特許出願第12/571,244号にあり、先の出願は、全ての目的のためにその全体が本明細書において参照によって援用される。
【0022】
ハンドヘルドGNSSデバイス100は、デバイスに対する配向データを生成するための地平線センサ、MEMSジャイロスコープ、または磁気コンパスのような様々なタイプのセンサを含み得る。配向データは、地平面に対するハンドヘルドGNSSデバイス100およびカメラレンズ110の配向を表現する。配向データは、それ自体のみで記録されるか、またはGNSS位置データもしくは画像データのような様々な他のデータに関連付けられ得る。以下に論じられるように、配向データは、マルチパス衛星信号による誤差を緩和するために使用され得る。
【0023】
地平線センサは、傾斜計、加速度計などのような任意のタイプの地平線センサであり得る。このような地平線センサは、当業者に周知であり、任意のこのようなデバイスが使用され得る。1つの例において、地平線センサの出力の表現がディスプレイ112を使用して表示され得る。ピッチおよびロールのような地平線センサ情報がGNSSデータと共に記録され得る。地平線センサ情報は、例えばアンテナの誤った水平化を補正するために後に有用であり得る。
【0024】
磁気コンパスは、当業者に周知であり、任意のこのようなデバイスが使用され得る。磁気コンパスは、ハンドヘルドGNSSデバイス100が向いている磁気方位の決定を可能にする。磁気コンパスデータは、キャプチャされた画像と共に記録され得る。磁気コンパスデータは、例えば、前向きのカメラから取得された画像データの方向を決定するために有用であり得る。
【0025】
MEMSジャイロスコープは、当業者に周知であり、任意のこのようなデバイスが使用され得る。MEMSジャイロスコープは、ハンドヘルドGNSSデバイス100の角速度の測定を可能にする。例えば磁気コンパスからの開始方向に基づいて、MEMSジャイロスコープ情報がデバイスの前面が向いている方向を決定するために使用され得る。MEMSジャイロスコープ情報は、キャプチャされた画像と共に記録され得る。MEMSジャイロスコープ情報は、例えば、前向きのカメラによってキャプチャされた2つの画像の間の空間関係を決定するために使用され得る。
【0026】
ハンドヘルドGNSSデバイス100は、直線距離を測定するために距離センサ(図示なし)をさらに含み得る。距離センサは、ソナー、レーザー、レーダー、赤外線などのような任意の距離発見技術を使用し得る。このような距離センサは、当業者に周知であり、任意のこのようなデバイスが使用され得る。
【0027】
図3は、本発明の実施形態に従ったハンドヘルドGNSSデバイス100の底面図を描写する。ハンドヘルドGNSSデバイス100は、一部の実施形態において、3つのねじ切りブッシュ114のような装着構造によって三脚またはある他の支持構造に装着され得る。
【0028】
図5は、本発明の実施形態に従った、ハンドヘルドGNSSデバイス100を使用してマルチパス誤差の影響を緩和するための例示的なプロセス500を描写する。ステップ502において、GNSSアンテナ402とGNSS受信器408(図4)とが複数のGNSS衛星から信号を受信する。ステップ504において、図1を参照すると、ユーザは、ハンドヘルドGNSSデバイス100を位置付けし、前部カメラレンズ110との使用のために装着されたセンサのような画像センサがハンドヘルドGNSSデバイス100の前方の領域の画像データを取得する。ステップ506において、CPU1108(図11)は、ハンドヘルドGNSSデバイス100の配向センサから配向データを受信する。ステップ508において、CPU1108は、構造物が空を妨害する場合、画像データにおける妨害領域を規定する妨害データを決定する。妨害データ、配向データ、およびGNSS衛星位置データに基づいて、ステップ510において、ハンドヘルドGNSSデバイス100のCPU1108は、ハンドヘルドGNSSデバイス100の視界の、妨害データにおいて表されている構造物が、画像データの観測視野に存在する衛星を妨害しているかどうかを決定する。ステップ512において、CPU1108は、複数のGNSS衛星のうちのいくつかからの信号と、ステップ510において決定されたような妨害領域に対するこれらの衛星の位置とに基づいてハンドヘルドGNSSデバイス100の位置を決定する。例示的なプロセス500の各ステップが以下にさらに詳細に説明される。
【0029】
ステップ502を参照すると、複数のGNSS衛星からの信号は、図4のアンテナ402と、GNSS受信器408とを介してハンドヘルドGNSSデバイス100によって受信される。信号は、ローカル基準クロックに対する遅延を測定するために使用され得る擬似ランダム二進符号によって変調されるキャリア高調波信号を含み得る。各衛星信号は、特定の衛星から来る信号として識別するための固有衛星識別符号を含む。以下のステップ512において、基準クロックに対する、信号の一部を受信することにおける遅延の測定は、ハンドヘルドGNSSデバイス100の位置を決定するために使用され得る。
【0030】
ステップ504を参照すると、前部カメラレンズ110と共に装着されたセンサのような画像センサは、図6の画像602を生成するために使用され得る画像データを取得する。この例において、画像データは、山604、ビル606、および木608を表すデータを含む。残りの画像データは、空610を表す。前部カメラレンズ110と共に装着された画像センサによって生成された画像データの観測視野は、フォーカスすることとレンズのズーム設定によって取得され得る。あるいは、観測視野は、レンズが固定フォーカスでありズームレンズでない場合、周知の固定された設定によって取得され得る。例えば、前部カメラレンズ110を使用する画像センサは、45度の固定された観測視野を有し得る。しかし、他の観測視野が使用され得る。
【0031】
ステップ506を参照すると、配向データは、配向センサから受信される。配向データは、ステップ504における画像データが取得された時点でのハンドヘルドGNSSデバイス100の3次元配向を決定するために充分な情報を提供し得る。例えば、配向データは、地平線に対するデバイスのピッチおよびロールを表現する傾斜データと、デバイスが向いている磁気方位を表現する磁気方位とを含み得る。
【0032】
配向データと画像データの観測視野についての情報とに基づいて、画像データが表す物理界における位置が算定され得る。第一の例において、配向データに基づいて、画像データは、画像センサが北に向けられ、地平線に対して15度に傾斜されていたときに取られたデータを表すことが決定され得る。配向データと画像データの観測視野とに基づいて、画像データが表す空および景観の部分が算定され得る。第二の例において、同じ画像センサが左に45度回転され、上にさらに15度傾けられた場合、その位置から取得された画像データは、画像センサが北西に向けられ、地平線に対して30度傾けられていたことを示す関連配向データを有する。繰り返すと、画像データが表す空および景観の部分が配向データと画像データの観測視野とに基づいて算定され得る。上記の第一の例および第二の例における画像データの観測視野次第で、各配向における画像データによって表される物理界の部分にオーバーラップが存在し得る。
【0033】
例えば画像センサに対する配向データと共に観測視野情報を使用することによって、画像データが表す空の部分が算定され得る。画像センサの光学軸が30度の方位角と、60度の地平線に対する仰角とを有する地点にあることを配向データが決定する例を考察する。さらに、光学軸に対して対称的な45度の固定された観測視野を有する画像センサを考察する。この例において、画像センサからの画像データは、7.5から52.5度の方位角と、37.5から82.5度の地平線に対する仰角とを有する空の領域を表す。
【0034】
画像センサの観測視野で利用可能な空の区分より大きな空の区分に対する画像データが必要とされる場合、次に、画像センサの複数の配向からの画像データが周知の画像処理技法を使用して共に縫合され得る。配向データはまた、2つの異なる配向においてとられた画像データ間の空間関係を規定することによって、縫合プロセスを補助し得る。縫合プロセスを使用して、可視の空全体に対する画像データが取得され得る。あるいは、画像データをともに縫合する代わりに、各固有の配向における画像データが以下のステップ508および510に従って別個に処理され得る。
【0035】
ステップ508を参照すると、空の視界を妨害する画像データにおいて存在する構造物を規定する妨害データを決定するために、画像処理技法が使用される。ステップ508を実行するための例示的な画像処理技法は、例示的な画像処理技法自体に色彩識別、スペクトル解析、赤外線解析、または縁検出を含み得るか使用し得る。図7の画像702は、図6の画像602を生成するために使用される画像データに基づいて妨害データから生成される。妨害データは、木608によってもたらされた妨害を考慮する妨害領域706とともに、山604およびビル606によってもたらされた妨害を考慮する妨害領域704を含む。妨害領域によって覆われてていない妨害データにおける領域は、妨害されていない空708とみなされる。
【0036】
ステップ510を参照すると、配向データ、妨害データ、およびGNSS衛星位置データを使用して、妨害領域に対するGNSS衛星の位置が決定される。GNSS衛星データは、空におけるGNSS衛星の位置を識別する。例えば、GNSS衛星データは、GNSS群における衛星の仰角および方位角を含み得る。これは、当業者に広範に利用可能である情報である。
【0037】
ステップ506に関して論じられたように、配向データおよび画像データの観測視野は、画像データが物理界の部分にマッピングされることを可能にする。配向データは、画像データの境界部における空の仰角および方位角の算定を可能にする。妨害データが画像データに基づき、画像データと同じ観測視野を有するべきであるため、配向データはまた、同じ手段で妨害データを物理界にマッピングするために使用され得る。物理界における衛星の位置を提供するGNSS衛星位置データを使用して、妨害領域に対するGNSS衛星の位置が妨害データにおいて識別され得る。
【0038】
ステップ506の例示的な結果の代表例が図8のオーバーレイ802に描写されている。このようなオーバーレイは、プロセス500に従って必ずしも生成されるわけではないが、オーバーレイ802は、ステップ506を説明するために有用である。
【0039】
オーバーレイ802は、一様な色彩の円で印された衛星804−812の位置を有する。衛星804は、山604によって妨害され、衛星806は、ビル606によって妨害され、衛星812は、木608によってもたらされた妨害706によって妨害されている。これらの衛星は、妨害された衛星とみなされ得る。衛星808および810は妨害されていない。しかし、衛星808から受信された信号に基づいた遅延の測定値は、マルチパス誤差がより大きく生じる傾向があるため、この衛星の妨害領域704への近接度に基づいて、衛星808は、疑わしい衛星とみなされ得る。
【0040】
ステップ512を参照すると、ハンドヘルドGNSSデバイス100の位置は、ステップ502における複数のGNSS衛星のうちのいくつかからの信号と、ステップ510において決定されたような妨害データにおける複数のGNSS衛星の位置に基づいて決定される。
【0041】
例えば、衛星信号が、図8の妨害されていない衛星808および810、ならびに妨害された衛星804、806、および812から受信された場合、ハンドヘルドGNSSデバイス100の位置は、図8に示されていない他の衛星からの信号と共に(妨害された衛星804、806、および812を除外して)衛星808および810からの信号に基づいて決定され得る。
【0042】
別の例において、図8のオーバーレイ802を参照すると、衛星808の妨害領域704への近接度は、衛星808からの信号が、妨害領域からより離れた衛星810の信号よりもマルチパス誤差による影響を受ける可能性が高いことを示し得る。この決定に基づいて、衛星808からの信号が除外され得るか、またはこの信号に基づく遅延の測定値がハンドヘルドGNSSデバイス100の位置の決定において重み付けの比率を下げられ得る。信号の重み付けの比率を下げることは、ハンドヘルドGNSSデバイス100の位置を決定するときに使用されるその信号の測定値の量を低減することによって達成され得、位置を決定するために必要とされる最低限の衛星の数が4であるため、4つより多くの衛星からの信号がある場合に特に有用であり得る。
【0043】
衛星の妨害領域への近接度以外の他のファクターもその衛星からの信号に基づいた遅延の測定値にマルチパス誤差が生じる傾向があるかどうかを決定するために使用され得る。例えば、3次元効果が考慮され得る。ハンドヘルドGNSSデバイス100に直接の視線を有する衛星が大きな妨害領域から180度の位置に位置する場合、衛星からの信号は、妨害領域によって表される構造物から反射し得る。衛星から直接信号を得ているにもかかわらず、ハンドヘルドGNSSデバイス100はまた、マルチパス誤差をもたらし得る反射信号を受信し得る。この例において、予測される妨害領域から反射される信号源に基づいて、衛星は、疑わしい衛星リストに追加され得る。
【0044】
1つの例において、衛星が疑わしいとみなされるかどうかは、マルチパス誤差があるマルチパス閾値以上である可能性を衛星が有するかどうかに基づいて決定され得る。衛星が閾値以上のマルチパス誤差を有する可能性は、上述された位置ファクター(例えば、妨害領域への距離、または3次元効果)、他のファクター、または複数のファクターの組み合わせに基づいて決定され得る。閾値は、例えばマルチパス環境におけるハンドヘルドGNSSデバイス100のコンピュータシュミレーションによって決定され得る。
【0045】
さらに別の例において、ステップ508からの妨害データに基づいて、ハンドヘルドGNSSデバイス100のディスプレイ112は、マルチパス誤差を低減するために、ユーザがデバイスを異なる位置に移動させるべきであることのインジケーションを提供し得る。
【0046】
図11は、ハンドヘルドGNSSデバイス100の様々なコンポーネント間の関係を示す例示的な論理図を描写する。1つの例として、GNSSアンテナ404は、GNSS衛星から受信された位置データを受信器408に送り得る。受信器408は、受信されたGNSS衛星信号をWGS84、ECEF、ENUなどのような地球ベースの座標に変換し得る。GNSS受信器408は、座標を他のデータと共に処理するためにCPU1108に座標をさらに送り得る。配向データ1112は、例えばピッチ地平線センサからのピッチデータとロール地平線センサからのロールデータとを含み得る。ビデオまたはスチルカメラからの画像データ1110はまた、GNSSアンテナ402によって受信された位置データ、通信アンテナ106によって受信された位置補助データ、および配向データ1112と共にCPU1108に送られ得る。距離センサからの距離データもCPU1108によって使用され得る。CPU1108は、関心地点マーカーの位置を決定するためにデータを処理し、ディスプレイ112上に表示される表示データを提供する。CPU1108は、メモリ1106にデータを記憶し得、メモリ1106からデータを引き出し得る。例えば、画像データおよび関連する配向データが、GNSS衛星のいずれかが視界から妨害されているかどうかを決定するまでメモリ1106に記憶され得る。GNSS衛星位置データもメモリ1106に記憶され得る。
【0047】
図12は、本発明の技術の様々な局面(例えば、GNSSデバイス、受信器、CPU1108、活動データロジック/データベース、これらの組み合わせなどとして)に対する処理機能を実装するために使用され得る例示的なコンピューティングシステム1200を描写する。コンピューティングシステム1200は、例示的なプロセス500のステップを実装するために使用され得る。当業者はまた、他のコンピューティングシステムまたはアーキテクチャを使用して本発明の技術をどのように実装するかを認識する。コンピューティングシステム1200は、例えばデスクトップ、モバイル電話、測地線デバイスなどのような、所与の用途または環境に対して望ましい、または適切であり得るユーザデバイスを表し得る。コンピューティングシステム1200は、プロセッサ1204のような1つ以上のプロセッサを含み得る。プロセッサ1204は、例えばマイクロプロセッサ、マイクロコントローラ、または他の制御ロジックのような汎用または特定用途向け処理エンジンを使用して実装され得る。この例において、プロセッサ1204は、バス1202または他の通信媒体に接続されている。
【0048】
コンピューティングシステム1200はまた、情報と、プロセッサ1204によって実行される命令とを記憶するための、ランダムアクセスメモリ(RAM)または他の動的メモリのような主要メモリ1208を含み得る。主要メモリ1208はまた、プロセッサ1204によって実行される命令を実行中に、一時変数または他の中間情報を記憶するために使用され得る。コンピューティングシステム1200は、同様に、プロセッサ1204のための静的情報および命令を記憶するための、バス1202に結合されたリードオンリーメモリ(「ROM」)または他の静的記憶デバイスを含み得る。
【0049】
コンピューティングシステム1200はまた、例えばメディアドライブ1212および取り外し可能記憶インターフェイス1220を含み得る情報記憶メカニズム1210を含み得る。メディアドライブ1212は、ハードディスクドライブ、フロッピ(登録商標)ディスクドライブ、磁気テープドライブ、光学ディスクドライブ、CDもしくはDVDドライブ(RもしくはRW)、または他の取り外し可能メディアドライブもしくは固定メディアドライブのような固定もしくは取り外し可能記憶メディアをサポートするためにドライブもしくは他のメカニズムを含み得る。記憶メディア1218は、メディアドライブ1212によって読み取られ、書き込まれる、例えばハードディスク、フロッピ(登録商標)ーディスク、磁気テープ、光学ディスク、CDもしくはDVD、または他の固定もしくは取り外し可能メディアを含み得る。これらの例が描写するように、記憶メディア1218は、コンピュータ読み取り可能記憶メディアを含み得、コンピュータ読み取り可能記憶メディアは、コンピュータ読み取り可能記憶メディア内に特定のコンピュータソフトウェアまたはデータを記憶している。
【0050】
代替の実施形態において、情報記憶メカニズム1210は、コンピュータプログラム、または他の命令もしくはデータがコンピューティングシステム1200にロードされることを可能にするための他の同様な機器類を含み得る。このような機器類は、例えばプログラムカートリッジおよびカートリッジインターフェイスと、取り外し可能メモリ(例えば、フラッシュメモリまたは他の取り外し可能メモリモジュール)およびメモリスロットと、ソフトウェアおよびデータが取り外し可能記憶ユニット1222からコンピューティングシステム1200に転送されることを可能にする他の取り外し可能記憶ユニット1222およびインターフェイス1220とのような取り外し可能記憶ユニット1222およびインターフェイス1220を含み得る。
【0051】
コンピューティングシステム1200はまた、通信インターフェイス1224を含み得る。通信インターフェイス1224は、ソフトウェアおよびデータがコンピューティングシステム1200と外部デバイスとの間で転送されることを可能にするために使用され得る。通信インターフェイス1224の例として、モデム、(イーサネット(登録商標)または他のNICカードのような)ネットワークインターフェイス、(例えば、USBポートのような)
通信ポート、PCMCIAスロットおよびカードなどが挙げられる。ソフトウェアおよびデータは、通信インターフェイス1224を介して転送される。チャネルの一部の例として、電話線、セルラー式電話リンク、RFリンク、ネットワークインターフェイス、構内通信網もしくは広域通信網、および他の通信チャネルが挙げられる。
【0052】
本明細書において、「コンピュータプログラム製品」および「コンピュータ読み取り可能記憶メディア」という用語は、概して、例えばメモリ1208、記憶メディア1218、または取り外し可能記憶ユニット1222のようなメディアを指すために使用され得る。コンピュータ読み取り可能メディアのこれらまたは他の形態は、1つ以上の命令の1つ以上のシーケンスを実行のためにプロセッサ1204に提供することに関わり得る。概して「コンピュータプログラム符号」と呼ばれるこのような命令(これらはコンピュータプログラムの形式、または他のグループに分類され得る)は、実行されたとき、コンピュータシステム1200が本発明の技術の実施形態の特徴または機能を実行することを可能にする。
【0053】
要素がソフトウェアを使用して実装される実施形態において、ソフトウェアは、例えば取り外し可能記憶ドライブ1222、メディアドライブ1212、または通信インターフェイス1224を使用してコンピュータ読み取り可能媒体に記憶され得、コンピューティングシステム1200にロードされ得る。制御ロジック(この例において、ソフトウェア命令またはコンピュータプログラム符号)は、プロセッサ1204によって実行された場合、プロセッサ1204が本明細書において記述されるような技術の機能を実行することをもたらす。
【0054】
上記の説明が、明瞭性のために、実施形態を異なる機能ユニットおよびプロセッサへの参照と共に記述したことが認識される。しかし、異なる機能ユニット、プロセッサ、またはドメイン間の任意の適切な機能の分配が使用され得ることが明白である。例えば、別個のプロセッサまたはコントローラによって実行されるように描写されている機能は、同じプロセッサまたはコントローラによって実行され得る。従って、特定の機能ユニットへの参照は、厳密な、論理的(もしくは物理的)構造(もしくは構成)を示すものではなく、記述された機能を提供するための単なる適切な手段への参照として理解される。
【0055】
さらに、個別に列挙されているが、複数の手段、要素、または方法ステップが、例えば単一のユニットまたはプロセッサによって実装され得る。その上、個別の特徴が異なる請求項において含まれ得るが、これらの個別の特徴は、有益的に組み合されることが可能であり得、異なる請求項における包含は、特徴の組み合わせが可能でない、または有益的でないことを暗示しない。また、1つのカテゴリの請求項における特徴の包含は、このカテゴリへの限定を暗示するのではなく、むしろ、特徴は適切に他の請求項カテゴリに等しく適用可能であり得る。
【0056】
特徴が特定の実施形態に関連して記述されているように思えるが、当業者は、記述された実施形態の様々な特徴が組み合され得ることを認識する。さらに、実施形態に関連して記述された局面は、独立して機能し得る。
【符号の説明】
【0057】
102 筐体
104 GNSSアンテナカバー
106 通信アンテナ
108 ハンドルグリップ
110 前部カメラレンズ
【技術分野】
【0001】
(分野)
本発明は、全地球的航法衛星システム(GNSS)デバイスにおける間接的衛星信号からのマルチパス誤差の影響を緩和することに関する。
【0002】
(関連出願の相互参照)
本出願は、2010年11月24日に出願された米国仮出願第61/417,209号に対する利益を主張し、先の出願は、本明細書において参照によって援用される。
【背景技術】
【0003】
(関連技術)
GPSまたはGLONASS(本明細書において以降、集合的に「GNSS」と呼ばれる)のような全地球的航法衛星システムを使用するナビゲーション受信器は、受信器の位置の高精度な決定を可能にする。衛星信号は、擬似ランダム二進符号によって変調されるキャリア高調波信号を含み得、キャリア高調波信号は、受信側において、ローカル基準クロックに対する遅延を測定するために使用され得る。これらの遅延の測定値は、受信器と衛星との間の擬似距離を決定するために使用され得る。受信器のローカルクロックが衛星内蔵クロックと異なるため、擬似距離は本来の幾何学的な距離ではない。視界内の衛星の数が4つ以上の場合、次に、測定された擬似距離は、受信器のクロックオフセットを補うとともにベクターX=(x、y、z)Tによって表されるようなユーザの単点の位置を決定するために処理され得る。
【0004】
GNSS技術の測位精度は、遅延測定値の精度に直接依存する。測定値誤差の周知の源は、マルチパス誤差による。マルチパス誤差は、受信アンテナの近隣に位置する表面からの無線信号の反射によってもたらされる。アンテナは、衛星から受信器への最短経路を通る直接信号と、間接的な経路をたどる反射された信号との双方を受信する。アンテナでの2つの(またはそれより多くの)信号の組み合わせは、未加工測定値の歪曲に繋がる。マルチパス誤差は、擬似距離およびキャリア位相測定値の双方に影響を及ぼす。マルチパスの空間相関は、アンテナに対する反射表面の位置に依存する。アンテナの上部に到達する反射を生成する表面に対して、キャリア位相マルチパスは、わずか数デシメートル離れたところに位置するアンテナに対して実質的に相関されていない場合がある。
【0005】
GNSS衛星からの信号に基づいて位置を決定することと、それらの信号に関連する潜在的な誤差のさらに詳細な記述は、本発明の譲受人に譲渡された2008年2月15日に出願された米国特許出願第12/070,333号と、2009年1月27に出願された米国特許出願第12/360,808号とにおいて公開され、これらの出願のそれぞれは、その全内容が全ての目的のために本明細書において参照によって援用される。
【0006】
従って、マルチパス誤差の影響を緩和する高精度の、携帯式の、完全なハンドヘルドGNSSデバイスが望まれる。
【発明の概要】
【課題を解決するための手段】
【0007】
GNSS衛星からの信号が受信される。画像センサからの画像データが受信される。配向センサからの配向データが受信される。配向データは、画像センサの配向を表現する。妨害データが画像データに基づいて決定される。妨害データは、妨害領域を含み、妨害領域は、その領域における空が構造物によって妨害されていることを示す。配向データ、妨害データ、およびGNSS衛星位置データに基づいて、妨害領域に対するGNSS衛星の位置が決定される。GNSSデバイスの位置は、GNSS衛星のうちのいくつかからの信号と、妨害領域に対するGNSS衛星の位置とに基づいて決定される。
【0008】
1つの例において、妨害領域内に位置する衛星からの信号は、GNSSデバイスの位置を決定するときに除外される。
【0009】
別の例において、信号が妨害領域に位置する衛星からであることは、これらの衛星からの信号が疑わしくない衛星と比べてマルチパス誤差を被る確率がより高いことを示す。
【0010】
本発明は例えば以下を提供する。
(項目1) GNSSデバイスにおけるマルチパス誤差の影響を緩和する方法であって、該方法は、
GNSS衛星の第一のセットにおける衛星から信号を受信することと、
少なくとも1つの画像センサから画像データを受信することと、
少なくとも1つの配向センサから配向データを受信することと、
該画像データに基づいて妨害データを決定することであって、該妨害データは妨害領域を示す、ことと、
該妨害データ、該配向データ、およびGNSS衛星位置データに基づいて、該妨害領域に対する衛星の第二のセットにおけるGNSS衛星の位置を決定することであって、該GNSS衛星位置データは、該GNSS衛星の第二のセットにおける衛星の位置を表現する、ことと、
該GNSSデバイスの位置を決定することであって、該GNSSデバイスの位置を決定することは、該GNSS衛星の第一のセットにおける衛生のうちの少なくとも1つからの信号と、該妨害領域に対する該第二のセットにおける少なくとも1つの衛星の位置とに基づき、該GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つは、該GNSS衛星の第二のセットにもある、ことと
を含む、方法。
(項目2) 少なくとも1つの衛星が、その位置が上記妨害領域内にある場合に、妨害された衛星であることを決定することをさらに含み、上記GNSSデバイスの位置を決定することは、該少なくとも1つの妨害された衛星からの信号を除外することをさらに含む、上記項目に記載の方法。
(項目3) 少なくとも1つの衛星が、上記妨害領域に対するその衛星の位置がマルチパス閾値より高いマルチパス誤差に対応する場合に、疑わしい衛星であることを決定することをさらに含み、上記GNSSデバイスの位置を決定することは、該少なくとも1つの疑わしい衛星からの信号を除外すること、または該信号の重み付けの比率を下げることをさらに含む、上記項目のいずれか一項に記載の方法。
(項目4) 上記画像データは、異なる配向における上記画像センサから受信された画像データの組み合わせである、上記項目のいずれか一項に記載の方法。
(項目5) GNSS衛星の第一のセットにおける衛星から信号を受信することと、
少なくとも1つの画像センサから画像データを受信することと、
少なくとも1つの配向センサから配向データを受信することと、
該画像データに基づいて妨害データを決定することであって、該妨害データは妨害領域を示す、ことと、
該妨害データ、該配向データ、およびGNSS衛星位置データに基づいて、該妨害領域に対する衛星の第二のセットにおけるGNSS衛星の位置を決定することであって、該GNSS衛星位置データは、該GNSS衛星の第二のセットにおける衛星の位置を表現する、ことと、
GNSSデバイスの位置を決定することであって、該GNSSデバイスの位置を決定することは、該GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つからの信号と、該妨害領域に対する該第二のセットにおける少なくとも1つの衛星の位置とに基づき、該GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つは、該GNSS衛星の第二のセットにもある、ことと
を行うためのコンピュータ実行可能命令を記憶する、コンピュータ読み取り可能記憶媒体。
(項目6) 少なくとも1つの衛星が、その位置が上記妨害領域内にある場合に、妨害された衛星である決定するためのコンピュータ実行可能命令をさらに記憶し、上記GNSSデバイスの位置を決定することは、該少なくとも1つの妨害された衛星からの信号を除外することをさらに含む、上記項目に記載のコンピュータ読み取り可能記憶媒体。
(項目7) 少なくとも1つの衛星が、上記妨害領域に対するその衛星の位置がマルチパス閾値より高いマルチパス誤差に対応する場合に、疑わしい衛星であることを決定するためのコンピュータ実行可能命令をさらに記憶し、上記GNSSデバイスの位置を決定することは、該少なくとも1つの疑わしい衛星からの信号を除外することまたは重み付けの比率を下げることをさらに含む、上記項目のいずれか一項に記載のコンピュータ読み取り可能記憶媒体。
(項目8) 上記画像データは、異なる配向における上記画像センサから受信された画像データの組み合わせである、上記項目のいずれか一項に記載のコンピュータ読み取り可能記憶媒体。
【0011】
(摘要)
GNSSデバイスにおけるマルチパス誤差の影響を緩和する方法が提供される。GNSS衛星からの信号が受信される。画像センサからの画像データが受信される。配向センサからの配向データが受信される。配向データは、画像センサの配向を表現する。妨害データが画像データに基づいて決定される。妨害データは、妨害領域を含み、妨害領域は、その領域における空が構造物によって妨害されていることを示す。配向データ、妨害データ、およびGNSS衛星位置データに基づいて、妨害領域に対するGNSS衛星の位置が決定される。GNSSデバイスの位置は、GNSS衛星のうちのいくつかからの信号と、妨害領域に対するGNSS衛星の位置とに基づいて決定され得る。
【図面の簡単な説明】
【0012】
【図1】図1は、本発明の実施形態に従ったハンドヘルドGNSSデバイスの斜視図を描写する。
【図2】図2は、本発明の実施形態に従ったハンドヘルドGNSSデバイスの別の斜視図を描写する。
【図3】図3は、本発明の実施形態に従ったハンドヘルドGNSSデバイスの別の斜視図を描写する。
【図4】図4は、本発明の実施形態に従った、カメラのビューファインダを含むハンドヘルドGNSSデバイスの分解図を描写する。
【図5】図5は、本発明の実施形態に従った、ハンドヘルドGNSSデバイスの位置を決定する場合にマルチパス誤差を緩和する方法のフローチャートを描写する。
【図6】図6は、本発明の実施形態に従った、ハンドヘルドGNSSデバイスの位置を決定する場合にマルチパス誤差を緩和するための方法のステップに従って受信された画像データから生成された画像を表す。
【図7】図7は、本発明の実施形態に従った、ハンドヘルドGNSSデバイスの位置を決定する場合にマルチパス誤差を緩和する方法のステップに従って生成された妨害データから生成された画像を表す。
【図8】図8は、本発明の実施形態に従った、ハンドヘルドGNSSデバイスの位置を決定する場合にマルチパス誤差を緩和する方法のステップに従って生成された妨害データから生成された画像におけるGNSS衛星の位置を表す。
【図9】図9は、カメラの3つの異なる配向に対する画像データから生成された画像を表す。
【図10】図10は、カメラの3つの配向に対する画像データから共に縫合された画像データから生成された妨害データを表す画像を表す。
【図11】図11は、本発明の実施形態に従った、ハンドヘルドGNSSデバイスの様々なコンポーネント間の関係を示す論理図を描写する。
【図12】図12は、特定の実施形態において処理機能の一部またはすべてを実装するために使用され得る典型的なコンピューティングシステムを描写する。
【発明を実施するための形態】
【0013】
以下の記述において、以下の記述の一部を形成し、本発明のいくつかの実施形態を描写する添付の図面に参照がなされる。他の実施形態が使用され得、本発明の範囲から逸脱することなく構造的および動作的な変更がなされ得ることが理解される。異なる図面における同じ参照記号の使用は、同様または同一アイテムを示す。
【0014】
以下の記述は、当業者が様々な実施形態を生成し使用することを可能にするために提供されている。特定のデバイス、技法、および用途の記述は、例としてのみ提供されている。本明細書において記述されている例への様々な改変は、当業者に明白であり、本明細書において規定される一般的な原理は、特許請求される本発明の精神および範囲から逸脱することなく他の例および用途に適用され得る。従って、様々な実施形態は、本明細書において記述され、示される例に限定されることが意図されず、特許請求と一貫した範囲が与えられる。
【0015】
図1は、例示的なハンドヘルドGNSSデバイス100を描写する。ハンドヘルドGNSSデバイス100は、単一の筐体102を使用する。いくつかのGNSS要素が筐体102に組み込まれ、GNSS要素は、筐体内にあるか、または筐体に堅固に装着されている。堅固に装着された要素は取り外し可能であり得る。筐体102は、ユーザが典型的なカメラを保持する方法と同様にハンドヘルドGNSSデバイス100を保持することを可能にする。1つの例において、筐体102は、GNSSアンテナ402(図4に例示的な分解図で示されている)を覆うために、GNSSアンテナカバー104を含み得る。GNSSアンテナ402は、複数のGNSS衛星によって送信され、ハンドヘルドGNSSデバイス100によって位置を決定するために使用される信号を受信し得る。GNSSアンテナ402は筐体102に組み込まれ得、筐体102内のGNSSアンテナカバー104の下にある。
【0016】
1つの例において、GNSSアンテナ402は、少なくとも4つのGNSS衛星によって送信された信号を受信し得る。図1によって示される例において、GNSSアンテナカバー104は、ハンドヘルドGNSSデバイス100の上面に位置する。
【0017】
ハンドヘルドGNSSデバイス100は、少なくとも1つのハンドグリップ108をさらに含み得る。図1に示される例において、2つのハンドグリップ108が筐体102に組み込まれている。ハンドグリップ108は、快適性のため、およびユーザの手の滑りを低減するためにゴム材料で覆われ得る。
【0018】
前部カメラレンズ110がハンドヘルドGNSSデバイス100の前面に位置する。画像センサ(図示なし)がハンドヘルドGNSSデバイス100内に装着され、画像センサがハンドヘルドGNSSデバイス100の前方の情景の画像データを生成するために前部カメラレンズ110と協働することを可能にする。第二の底面カメラレンズ116が、図3に示される例において、ハンドヘルドGNSSデバイス100の底面に位置し得る。含まれるカメラは、スチルカメラまたはビデオカメラであり得る。
【0019】
図2に示されるように、ハンドヘルドGNSSデバイス100は、デバイスを位置づけすることにおいてユーザを補助するために、情報を表示するためのディスプレイ112をさらに含み得る。ディスプレイ112は、液晶(LCD)ディスプレイ、発光ダイオード(LED)ディスプレイなどのような任意の電子ディスプレイであり得る。このようなディスプレイデバイスは、当業者に周知であり、任意のこのようなデバイスが使用され得る。図2によって示される例において、ディスプレイ112は、ハンドヘルドGNSSデバイス100の筐体102の背面に組み込まれている。
【0020】
ハンドヘルドGNSSデバイス100は、スチル画像またはビデオを記録するためのカメラをさらに含み得る。このような記録デバイスは、当業者に周知であり、任意のこのようなデバイスが使用され得る。図1に描写される例において、前部カメラレンズ110がハンドヘルドGNSSデバイス100の前面に位置する。1つの例において、ディスプレイ112は、前部カメラレンズ110の出力を表示するために使用され得る。
【0021】
図3を参照すると、ハンドヘルドGNSSデバイス100はまた、観察、およびハンドヘルドGNSSデバイス100の関心地点マーカーとの整合のために、ハンドヘルドGNSSデバイス100の底面において第二の底面カメラレンズ116を含み得る。関心地点マーカーの画像はまた、GNSS受信器808が正確に装着されたことを確実にするため、または記録されたカメラ情報に基づいて後に不整合を補正するためにGNSSデータと共に記録され得る。底面カメラレンズ116、および不整合を補正するための底面カメラレンズの使用の記述は、本出願の譲受人に譲渡された、2009年9月30日に出願された米国特許出願第12/571,244号にあり、先の出願は、全ての目的のためにその全体が本明細書において参照によって援用される。
【0022】
ハンドヘルドGNSSデバイス100は、デバイスに対する配向データを生成するための地平線センサ、MEMSジャイロスコープ、または磁気コンパスのような様々なタイプのセンサを含み得る。配向データは、地平面に対するハンドヘルドGNSSデバイス100およびカメラレンズ110の配向を表現する。配向データは、それ自体のみで記録されるか、またはGNSS位置データもしくは画像データのような様々な他のデータに関連付けられ得る。以下に論じられるように、配向データは、マルチパス衛星信号による誤差を緩和するために使用され得る。
【0023】
地平線センサは、傾斜計、加速度計などのような任意のタイプの地平線センサであり得る。このような地平線センサは、当業者に周知であり、任意のこのようなデバイスが使用され得る。1つの例において、地平線センサの出力の表現がディスプレイ112を使用して表示され得る。ピッチおよびロールのような地平線センサ情報がGNSSデータと共に記録され得る。地平線センサ情報は、例えばアンテナの誤った水平化を補正するために後に有用であり得る。
【0024】
磁気コンパスは、当業者に周知であり、任意のこのようなデバイスが使用され得る。磁気コンパスは、ハンドヘルドGNSSデバイス100が向いている磁気方位の決定を可能にする。磁気コンパスデータは、キャプチャされた画像と共に記録され得る。磁気コンパスデータは、例えば、前向きのカメラから取得された画像データの方向を決定するために有用であり得る。
【0025】
MEMSジャイロスコープは、当業者に周知であり、任意のこのようなデバイスが使用され得る。MEMSジャイロスコープは、ハンドヘルドGNSSデバイス100の角速度の測定を可能にする。例えば磁気コンパスからの開始方向に基づいて、MEMSジャイロスコープ情報がデバイスの前面が向いている方向を決定するために使用され得る。MEMSジャイロスコープ情報は、キャプチャされた画像と共に記録され得る。MEMSジャイロスコープ情報は、例えば、前向きのカメラによってキャプチャされた2つの画像の間の空間関係を決定するために使用され得る。
【0026】
ハンドヘルドGNSSデバイス100は、直線距離を測定するために距離センサ(図示なし)をさらに含み得る。距離センサは、ソナー、レーザー、レーダー、赤外線などのような任意の距離発見技術を使用し得る。このような距離センサは、当業者に周知であり、任意のこのようなデバイスが使用され得る。
【0027】
図3は、本発明の実施形態に従ったハンドヘルドGNSSデバイス100の底面図を描写する。ハンドヘルドGNSSデバイス100は、一部の実施形態において、3つのねじ切りブッシュ114のような装着構造によって三脚またはある他の支持構造に装着され得る。
【0028】
図5は、本発明の実施形態に従った、ハンドヘルドGNSSデバイス100を使用してマルチパス誤差の影響を緩和するための例示的なプロセス500を描写する。ステップ502において、GNSSアンテナ402とGNSS受信器408(図4)とが複数のGNSS衛星から信号を受信する。ステップ504において、図1を参照すると、ユーザは、ハンドヘルドGNSSデバイス100を位置付けし、前部カメラレンズ110との使用のために装着されたセンサのような画像センサがハンドヘルドGNSSデバイス100の前方の領域の画像データを取得する。ステップ506において、CPU1108(図11)は、ハンドヘルドGNSSデバイス100の配向センサから配向データを受信する。ステップ508において、CPU1108は、構造物が空を妨害する場合、画像データにおける妨害領域を規定する妨害データを決定する。妨害データ、配向データ、およびGNSS衛星位置データに基づいて、ステップ510において、ハンドヘルドGNSSデバイス100のCPU1108は、ハンドヘルドGNSSデバイス100の視界の、妨害データにおいて表されている構造物が、画像データの観測視野に存在する衛星を妨害しているかどうかを決定する。ステップ512において、CPU1108は、複数のGNSS衛星のうちのいくつかからの信号と、ステップ510において決定されたような妨害領域に対するこれらの衛星の位置とに基づいてハンドヘルドGNSSデバイス100の位置を決定する。例示的なプロセス500の各ステップが以下にさらに詳細に説明される。
【0029】
ステップ502を参照すると、複数のGNSS衛星からの信号は、図4のアンテナ402と、GNSS受信器408とを介してハンドヘルドGNSSデバイス100によって受信される。信号は、ローカル基準クロックに対する遅延を測定するために使用され得る擬似ランダム二進符号によって変調されるキャリア高調波信号を含み得る。各衛星信号は、特定の衛星から来る信号として識別するための固有衛星識別符号を含む。以下のステップ512において、基準クロックに対する、信号の一部を受信することにおける遅延の測定は、ハンドヘルドGNSSデバイス100の位置を決定するために使用され得る。
【0030】
ステップ504を参照すると、前部カメラレンズ110と共に装着されたセンサのような画像センサは、図6の画像602を生成するために使用され得る画像データを取得する。この例において、画像データは、山604、ビル606、および木608を表すデータを含む。残りの画像データは、空610を表す。前部カメラレンズ110と共に装着された画像センサによって生成された画像データの観測視野は、フォーカスすることとレンズのズーム設定によって取得され得る。あるいは、観測視野は、レンズが固定フォーカスでありズームレンズでない場合、周知の固定された設定によって取得され得る。例えば、前部カメラレンズ110を使用する画像センサは、45度の固定された観測視野を有し得る。しかし、他の観測視野が使用され得る。
【0031】
ステップ506を参照すると、配向データは、配向センサから受信される。配向データは、ステップ504における画像データが取得された時点でのハンドヘルドGNSSデバイス100の3次元配向を決定するために充分な情報を提供し得る。例えば、配向データは、地平線に対するデバイスのピッチおよびロールを表現する傾斜データと、デバイスが向いている磁気方位を表現する磁気方位とを含み得る。
【0032】
配向データと画像データの観測視野についての情報とに基づいて、画像データが表す物理界における位置が算定され得る。第一の例において、配向データに基づいて、画像データは、画像センサが北に向けられ、地平線に対して15度に傾斜されていたときに取られたデータを表すことが決定され得る。配向データと画像データの観測視野とに基づいて、画像データが表す空および景観の部分が算定され得る。第二の例において、同じ画像センサが左に45度回転され、上にさらに15度傾けられた場合、その位置から取得された画像データは、画像センサが北西に向けられ、地平線に対して30度傾けられていたことを示す関連配向データを有する。繰り返すと、画像データが表す空および景観の部分が配向データと画像データの観測視野とに基づいて算定され得る。上記の第一の例および第二の例における画像データの観測視野次第で、各配向における画像データによって表される物理界の部分にオーバーラップが存在し得る。
【0033】
例えば画像センサに対する配向データと共に観測視野情報を使用することによって、画像データが表す空の部分が算定され得る。画像センサの光学軸が30度の方位角と、60度の地平線に対する仰角とを有する地点にあることを配向データが決定する例を考察する。さらに、光学軸に対して対称的な45度の固定された観測視野を有する画像センサを考察する。この例において、画像センサからの画像データは、7.5から52.5度の方位角と、37.5から82.5度の地平線に対する仰角とを有する空の領域を表す。
【0034】
画像センサの観測視野で利用可能な空の区分より大きな空の区分に対する画像データが必要とされる場合、次に、画像センサの複数の配向からの画像データが周知の画像処理技法を使用して共に縫合され得る。配向データはまた、2つの異なる配向においてとられた画像データ間の空間関係を規定することによって、縫合プロセスを補助し得る。縫合プロセスを使用して、可視の空全体に対する画像データが取得され得る。あるいは、画像データをともに縫合する代わりに、各固有の配向における画像データが以下のステップ508および510に従って別個に処理され得る。
【0035】
ステップ508を参照すると、空の視界を妨害する画像データにおいて存在する構造物を規定する妨害データを決定するために、画像処理技法が使用される。ステップ508を実行するための例示的な画像処理技法は、例示的な画像処理技法自体に色彩識別、スペクトル解析、赤外線解析、または縁検出を含み得るか使用し得る。図7の画像702は、図6の画像602を生成するために使用される画像データに基づいて妨害データから生成される。妨害データは、木608によってもたらされた妨害を考慮する妨害領域706とともに、山604およびビル606によってもたらされた妨害を考慮する妨害領域704を含む。妨害領域によって覆われてていない妨害データにおける領域は、妨害されていない空708とみなされる。
【0036】
ステップ510を参照すると、配向データ、妨害データ、およびGNSS衛星位置データを使用して、妨害領域に対するGNSS衛星の位置が決定される。GNSS衛星データは、空におけるGNSS衛星の位置を識別する。例えば、GNSS衛星データは、GNSS群における衛星の仰角および方位角を含み得る。これは、当業者に広範に利用可能である情報である。
【0037】
ステップ506に関して論じられたように、配向データおよび画像データの観測視野は、画像データが物理界の部分にマッピングされることを可能にする。配向データは、画像データの境界部における空の仰角および方位角の算定を可能にする。妨害データが画像データに基づき、画像データと同じ観測視野を有するべきであるため、配向データはまた、同じ手段で妨害データを物理界にマッピングするために使用され得る。物理界における衛星の位置を提供するGNSS衛星位置データを使用して、妨害領域に対するGNSS衛星の位置が妨害データにおいて識別され得る。
【0038】
ステップ506の例示的な結果の代表例が図8のオーバーレイ802に描写されている。このようなオーバーレイは、プロセス500に従って必ずしも生成されるわけではないが、オーバーレイ802は、ステップ506を説明するために有用である。
【0039】
オーバーレイ802は、一様な色彩の円で印された衛星804−812の位置を有する。衛星804は、山604によって妨害され、衛星806は、ビル606によって妨害され、衛星812は、木608によってもたらされた妨害706によって妨害されている。これらの衛星は、妨害された衛星とみなされ得る。衛星808および810は妨害されていない。しかし、衛星808から受信された信号に基づいた遅延の測定値は、マルチパス誤差がより大きく生じる傾向があるため、この衛星の妨害領域704への近接度に基づいて、衛星808は、疑わしい衛星とみなされ得る。
【0040】
ステップ512を参照すると、ハンドヘルドGNSSデバイス100の位置は、ステップ502における複数のGNSS衛星のうちのいくつかからの信号と、ステップ510において決定されたような妨害データにおける複数のGNSS衛星の位置に基づいて決定される。
【0041】
例えば、衛星信号が、図8の妨害されていない衛星808および810、ならびに妨害された衛星804、806、および812から受信された場合、ハンドヘルドGNSSデバイス100の位置は、図8に示されていない他の衛星からの信号と共に(妨害された衛星804、806、および812を除外して)衛星808および810からの信号に基づいて決定され得る。
【0042】
別の例において、図8のオーバーレイ802を参照すると、衛星808の妨害領域704への近接度は、衛星808からの信号が、妨害領域からより離れた衛星810の信号よりもマルチパス誤差による影響を受ける可能性が高いことを示し得る。この決定に基づいて、衛星808からの信号が除外され得るか、またはこの信号に基づく遅延の測定値がハンドヘルドGNSSデバイス100の位置の決定において重み付けの比率を下げられ得る。信号の重み付けの比率を下げることは、ハンドヘルドGNSSデバイス100の位置を決定するときに使用されるその信号の測定値の量を低減することによって達成され得、位置を決定するために必要とされる最低限の衛星の数が4であるため、4つより多くの衛星からの信号がある場合に特に有用であり得る。
【0043】
衛星の妨害領域への近接度以外の他のファクターもその衛星からの信号に基づいた遅延の測定値にマルチパス誤差が生じる傾向があるかどうかを決定するために使用され得る。例えば、3次元効果が考慮され得る。ハンドヘルドGNSSデバイス100に直接の視線を有する衛星が大きな妨害領域から180度の位置に位置する場合、衛星からの信号は、妨害領域によって表される構造物から反射し得る。衛星から直接信号を得ているにもかかわらず、ハンドヘルドGNSSデバイス100はまた、マルチパス誤差をもたらし得る反射信号を受信し得る。この例において、予測される妨害領域から反射される信号源に基づいて、衛星は、疑わしい衛星リストに追加され得る。
【0044】
1つの例において、衛星が疑わしいとみなされるかどうかは、マルチパス誤差があるマルチパス閾値以上である可能性を衛星が有するかどうかに基づいて決定され得る。衛星が閾値以上のマルチパス誤差を有する可能性は、上述された位置ファクター(例えば、妨害領域への距離、または3次元効果)、他のファクター、または複数のファクターの組み合わせに基づいて決定され得る。閾値は、例えばマルチパス環境におけるハンドヘルドGNSSデバイス100のコンピュータシュミレーションによって決定され得る。
【0045】
さらに別の例において、ステップ508からの妨害データに基づいて、ハンドヘルドGNSSデバイス100のディスプレイ112は、マルチパス誤差を低減するために、ユーザがデバイスを異なる位置に移動させるべきであることのインジケーションを提供し得る。
【0046】
図11は、ハンドヘルドGNSSデバイス100の様々なコンポーネント間の関係を示す例示的な論理図を描写する。1つの例として、GNSSアンテナ404は、GNSS衛星から受信された位置データを受信器408に送り得る。受信器408は、受信されたGNSS衛星信号をWGS84、ECEF、ENUなどのような地球ベースの座標に変換し得る。GNSS受信器408は、座標を他のデータと共に処理するためにCPU1108に座標をさらに送り得る。配向データ1112は、例えばピッチ地平線センサからのピッチデータとロール地平線センサからのロールデータとを含み得る。ビデオまたはスチルカメラからの画像データ1110はまた、GNSSアンテナ402によって受信された位置データ、通信アンテナ106によって受信された位置補助データ、および配向データ1112と共にCPU1108に送られ得る。距離センサからの距離データもCPU1108によって使用され得る。CPU1108は、関心地点マーカーの位置を決定するためにデータを処理し、ディスプレイ112上に表示される表示データを提供する。CPU1108は、メモリ1106にデータを記憶し得、メモリ1106からデータを引き出し得る。例えば、画像データおよび関連する配向データが、GNSS衛星のいずれかが視界から妨害されているかどうかを決定するまでメモリ1106に記憶され得る。GNSS衛星位置データもメモリ1106に記憶され得る。
【0047】
図12は、本発明の技術の様々な局面(例えば、GNSSデバイス、受信器、CPU1108、活動データロジック/データベース、これらの組み合わせなどとして)に対する処理機能を実装するために使用され得る例示的なコンピューティングシステム1200を描写する。コンピューティングシステム1200は、例示的なプロセス500のステップを実装するために使用され得る。当業者はまた、他のコンピューティングシステムまたはアーキテクチャを使用して本発明の技術をどのように実装するかを認識する。コンピューティングシステム1200は、例えばデスクトップ、モバイル電話、測地線デバイスなどのような、所与の用途または環境に対して望ましい、または適切であり得るユーザデバイスを表し得る。コンピューティングシステム1200は、プロセッサ1204のような1つ以上のプロセッサを含み得る。プロセッサ1204は、例えばマイクロプロセッサ、マイクロコントローラ、または他の制御ロジックのような汎用または特定用途向け処理エンジンを使用して実装され得る。この例において、プロセッサ1204は、バス1202または他の通信媒体に接続されている。
【0048】
コンピューティングシステム1200はまた、情報と、プロセッサ1204によって実行される命令とを記憶するための、ランダムアクセスメモリ(RAM)または他の動的メモリのような主要メモリ1208を含み得る。主要メモリ1208はまた、プロセッサ1204によって実行される命令を実行中に、一時変数または他の中間情報を記憶するために使用され得る。コンピューティングシステム1200は、同様に、プロセッサ1204のための静的情報および命令を記憶するための、バス1202に結合されたリードオンリーメモリ(「ROM」)または他の静的記憶デバイスを含み得る。
【0049】
コンピューティングシステム1200はまた、例えばメディアドライブ1212および取り外し可能記憶インターフェイス1220を含み得る情報記憶メカニズム1210を含み得る。メディアドライブ1212は、ハードディスクドライブ、フロッピ(登録商標)ディスクドライブ、磁気テープドライブ、光学ディスクドライブ、CDもしくはDVDドライブ(RもしくはRW)、または他の取り外し可能メディアドライブもしくは固定メディアドライブのような固定もしくは取り外し可能記憶メディアをサポートするためにドライブもしくは他のメカニズムを含み得る。記憶メディア1218は、メディアドライブ1212によって読み取られ、書き込まれる、例えばハードディスク、フロッピ(登録商標)ーディスク、磁気テープ、光学ディスク、CDもしくはDVD、または他の固定もしくは取り外し可能メディアを含み得る。これらの例が描写するように、記憶メディア1218は、コンピュータ読み取り可能記憶メディアを含み得、コンピュータ読み取り可能記憶メディアは、コンピュータ読み取り可能記憶メディア内に特定のコンピュータソフトウェアまたはデータを記憶している。
【0050】
代替の実施形態において、情報記憶メカニズム1210は、コンピュータプログラム、または他の命令もしくはデータがコンピューティングシステム1200にロードされることを可能にするための他の同様な機器類を含み得る。このような機器類は、例えばプログラムカートリッジおよびカートリッジインターフェイスと、取り外し可能メモリ(例えば、フラッシュメモリまたは他の取り外し可能メモリモジュール)およびメモリスロットと、ソフトウェアおよびデータが取り外し可能記憶ユニット1222からコンピューティングシステム1200に転送されることを可能にする他の取り外し可能記憶ユニット1222およびインターフェイス1220とのような取り外し可能記憶ユニット1222およびインターフェイス1220を含み得る。
【0051】
コンピューティングシステム1200はまた、通信インターフェイス1224を含み得る。通信インターフェイス1224は、ソフトウェアおよびデータがコンピューティングシステム1200と外部デバイスとの間で転送されることを可能にするために使用され得る。通信インターフェイス1224の例として、モデム、(イーサネット(登録商標)または他のNICカードのような)ネットワークインターフェイス、(例えば、USBポートのような)
通信ポート、PCMCIAスロットおよびカードなどが挙げられる。ソフトウェアおよびデータは、通信インターフェイス1224を介して転送される。チャネルの一部の例として、電話線、セルラー式電話リンク、RFリンク、ネットワークインターフェイス、構内通信網もしくは広域通信網、および他の通信チャネルが挙げられる。
【0052】
本明細書において、「コンピュータプログラム製品」および「コンピュータ読み取り可能記憶メディア」という用語は、概して、例えばメモリ1208、記憶メディア1218、または取り外し可能記憶ユニット1222のようなメディアを指すために使用され得る。コンピュータ読み取り可能メディアのこれらまたは他の形態は、1つ以上の命令の1つ以上のシーケンスを実行のためにプロセッサ1204に提供することに関わり得る。概して「コンピュータプログラム符号」と呼ばれるこのような命令(これらはコンピュータプログラムの形式、または他のグループに分類され得る)は、実行されたとき、コンピュータシステム1200が本発明の技術の実施形態の特徴または機能を実行することを可能にする。
【0053】
要素がソフトウェアを使用して実装される実施形態において、ソフトウェアは、例えば取り外し可能記憶ドライブ1222、メディアドライブ1212、または通信インターフェイス1224を使用してコンピュータ読み取り可能媒体に記憶され得、コンピューティングシステム1200にロードされ得る。制御ロジック(この例において、ソフトウェア命令またはコンピュータプログラム符号)は、プロセッサ1204によって実行された場合、プロセッサ1204が本明細書において記述されるような技術の機能を実行することをもたらす。
【0054】
上記の説明が、明瞭性のために、実施形態を異なる機能ユニットおよびプロセッサへの参照と共に記述したことが認識される。しかし、異なる機能ユニット、プロセッサ、またはドメイン間の任意の適切な機能の分配が使用され得ることが明白である。例えば、別個のプロセッサまたはコントローラによって実行されるように描写されている機能は、同じプロセッサまたはコントローラによって実行され得る。従って、特定の機能ユニットへの参照は、厳密な、論理的(もしくは物理的)構造(もしくは構成)を示すものではなく、記述された機能を提供するための単なる適切な手段への参照として理解される。
【0055】
さらに、個別に列挙されているが、複数の手段、要素、または方法ステップが、例えば単一のユニットまたはプロセッサによって実装され得る。その上、個別の特徴が異なる請求項において含まれ得るが、これらの個別の特徴は、有益的に組み合されることが可能であり得、異なる請求項における包含は、特徴の組み合わせが可能でない、または有益的でないことを暗示しない。また、1つのカテゴリの請求項における特徴の包含は、このカテゴリへの限定を暗示するのではなく、むしろ、特徴は適切に他の請求項カテゴリに等しく適用可能であり得る。
【0056】
特徴が特定の実施形態に関連して記述されているように思えるが、当業者は、記述された実施形態の様々な特徴が組み合され得ることを認識する。さらに、実施形態に関連して記述された局面は、独立して機能し得る。
【符号の説明】
【0057】
102 筐体
104 GNSSアンテナカバー
106 通信アンテナ
108 ハンドルグリップ
110 前部カメラレンズ
【特許請求の範囲】
【請求項1】
GNSSデバイスにおけるマルチパス誤差の影響を緩和する方法であって、該方法は、
GNSS衛星の第一のセットにおける衛星から信号を受信することと、
少なくとも1つの画像センサから画像データを受信することと、
少なくとも1つの配向センサから配向データを受信することと、
該画像データに基づいて妨害データを決定することであって、該妨害データは妨害領域を示す、ことと、
該妨害データ、該配向データ、およびGNSS衛星位置データに基づいて、該妨害領域に対する衛星の第二のセットにおけるGNSS衛星の位置を決定することであって、該GNSS衛星位置データは、該GNSS衛星の第二のセットにおける衛星の位置を表現する、ことと、
該GNSSデバイスの位置を決定することであって、該GNSSデバイスの位置を決定することは、該GNSS衛星の第一のセットにおける衛生のうちの少なくとも1つからの信号と、該妨害領域に対する該第二のセットにおける少なくとも1つの衛星の位置とに基づき、該GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つは、該GNSS衛星の第二のセットにもある、ことと
を含む、方法。
【請求項2】
少なくとも1つの衛星が、その位置が前記妨害領域内にある場合に、妨害された衛星であることを決定することをさらに含み、前記GNSSデバイスの位置を決定することは、該少なくとも1つの妨害された衛星からの信号を除外することをさらに含む、請求項1に記載の方法。
【請求項3】
少なくとも1つの衛星が、前記妨害領域に対するその衛星の位置がマルチパス閾値より高いマルチパス誤差に対応する場合に、疑わしい衛星であることを決定することをさらに含み、前記GNSSデバイスの位置を決定することは、該少なくとも1つの疑わしい衛星からの信号を除外すること、または該信号の重み付けの比率を下げることをさらに含む、請求項1に記載の方法。
【請求項4】
前記画像データは、異なる配向における前記画像センサから受信された画像データの組み合わせである、請求項1に記載の方法。
【請求項5】
GNSS衛星の第一のセットにおける衛星から信号を受信することと、
少なくとも1つの画像センサから画像データを受信することと、
少なくとも1つの配向センサから配向データを受信することと、
該画像データに基づいて妨害データを決定することであって、該妨害データは妨害領域を示す、ことと、
該妨害データ、該配向データ、およびGNSS衛星位置データに基づいて、該妨害領域に対する衛星の第二のセットにおけるGNSS衛星の位置を決定することであって、該GNSS衛星位置データは、該GNSS衛星の第二のセットにおける衛星の位置を表現する、ことと、
GNSSデバイスの位置を決定することであって、該GNSSデバイスの位置を決定することは、該GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つからの信号と、該妨害領域に対する該第二のセットにおける少なくとも1つの衛星の位置とに基づき、該GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つは、該GNSS衛星の第二のセットにもある、ことと
を行うためのコンピュータ実行可能命令を記憶する、コンピュータ読み取り可能記憶媒体。
【請求項6】
少なくとも1つの衛星が、その位置が前記妨害領域内にある場合に、妨害された衛星である決定するためのコンピュータ実行可能命令をさらに記憶し、前記GNSSデバイスの位置を決定することは、該少なくとも1つの妨害された衛星からの信号を除外することをさらに含む、請求項5に記載のコンピュータ読み取り可能記憶媒体。
【請求項7】
少なくとも1つの衛星が、前記妨害領域に対するその衛星の位置がマルチパス閾値より高いマルチパス誤差に対応する場合に、疑わしい衛星であることを決定するためのコンピュータ実行可能命令をさらに記憶し、前記GNSSデバイスの位置を決定することは、該少なくとも1つの疑わしい衛星からの信号を除外することまたは重み付けの比率を下げることをさらに含む、請求項5に記載のコンピュータ読み取り可能記憶媒体。
【請求項8】
前記画像データは、異なる配向における前記画像センサから受信された画像データの組み合わせである、請求項5に記載のコンピュータ読み取り可能記憶媒体。
【請求項1】
GNSSデバイスにおけるマルチパス誤差の影響を緩和する方法であって、該方法は、
GNSS衛星の第一のセットにおける衛星から信号を受信することと、
少なくとも1つの画像センサから画像データを受信することと、
少なくとも1つの配向センサから配向データを受信することと、
該画像データに基づいて妨害データを決定することであって、該妨害データは妨害領域を示す、ことと、
該妨害データ、該配向データ、およびGNSS衛星位置データに基づいて、該妨害領域に対する衛星の第二のセットにおけるGNSS衛星の位置を決定することであって、該GNSS衛星位置データは、該GNSS衛星の第二のセットにおける衛星の位置を表現する、ことと、
該GNSSデバイスの位置を決定することであって、該GNSSデバイスの位置を決定することは、該GNSS衛星の第一のセットにおける衛生のうちの少なくとも1つからの信号と、該妨害領域に対する該第二のセットにおける少なくとも1つの衛星の位置とに基づき、該GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つは、該GNSS衛星の第二のセットにもある、ことと
を含む、方法。
【請求項2】
少なくとも1つの衛星が、その位置が前記妨害領域内にある場合に、妨害された衛星であることを決定することをさらに含み、前記GNSSデバイスの位置を決定することは、該少なくとも1つの妨害された衛星からの信号を除外することをさらに含む、請求項1に記載の方法。
【請求項3】
少なくとも1つの衛星が、前記妨害領域に対するその衛星の位置がマルチパス閾値より高いマルチパス誤差に対応する場合に、疑わしい衛星であることを決定することをさらに含み、前記GNSSデバイスの位置を決定することは、該少なくとも1つの疑わしい衛星からの信号を除外すること、または該信号の重み付けの比率を下げることをさらに含む、請求項1に記載の方法。
【請求項4】
前記画像データは、異なる配向における前記画像センサから受信された画像データの組み合わせである、請求項1に記載の方法。
【請求項5】
GNSS衛星の第一のセットにおける衛星から信号を受信することと、
少なくとも1つの画像センサから画像データを受信することと、
少なくとも1つの配向センサから配向データを受信することと、
該画像データに基づいて妨害データを決定することであって、該妨害データは妨害領域を示す、ことと、
該妨害データ、該配向データ、およびGNSS衛星位置データに基づいて、該妨害領域に対する衛星の第二のセットにおけるGNSS衛星の位置を決定することであって、該GNSS衛星位置データは、該GNSS衛星の第二のセットにおける衛星の位置を表現する、ことと、
GNSSデバイスの位置を決定することであって、該GNSSデバイスの位置を決定することは、該GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つからの信号と、該妨害領域に対する該第二のセットにおける少なくとも1つの衛星の位置とに基づき、該GNSS衛星の第一のセットにおける衛星のうちの少なくとも1つは、該GNSS衛星の第二のセットにもある、ことと
を行うためのコンピュータ実行可能命令を記憶する、コンピュータ読み取り可能記憶媒体。
【請求項6】
少なくとも1つの衛星が、その位置が前記妨害領域内にある場合に、妨害された衛星である決定するためのコンピュータ実行可能命令をさらに記憶し、前記GNSSデバイスの位置を決定することは、該少なくとも1つの妨害された衛星からの信号を除外することをさらに含む、請求項5に記載のコンピュータ読み取り可能記憶媒体。
【請求項7】
少なくとも1つの衛星が、前記妨害領域に対するその衛星の位置がマルチパス閾値より高いマルチパス誤差に対応する場合に、疑わしい衛星であることを決定するためのコンピュータ実行可能命令をさらに記憶し、前記GNSSデバイスの位置を決定することは、該少なくとも1つの疑わしい衛星からの信号を除外することまたは重み付けの比率を下げることをさらに含む、請求項5に記載のコンピュータ読み取り可能記憶媒体。
【請求項8】
前記画像データは、異なる配向における前記画像センサから受信された画像データの組み合わせである、請求項5に記載のコンピュータ読み取り可能記憶媒体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図7】
【図8】
【図10】
【図11】
【図12】
【図6】
【図9】
【図2】
【図3】
【図4】
【図5】
【図7】
【図8】
【図10】
【図11】
【図12】
【図6】
【図9】
【公開番号】特開2012−112959(P2012−112959A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2011−255021(P2011−255021)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(510001320)ジャバド ジーエヌエスエス, インコーポレイテッド (8)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(510001320)ジャバド ジーエヌエスエス, インコーポレイテッド (8)
【Fターム(参考)】
[ Back to top ]