
GNSS受信機、航法装置、信号処理装置、GNSS速度補正プログラム及びGNSS速度補正方法

【課題】アンテナの動揺による速度測定値の誤差を遅延無く除去することが可能であり、しかも特別な設定作業等を行う必要が無いGNSS受信機を提供する。
【解決手段】本実施形態のGPS受信機2は、GPSアンテナ4と、GNSS位置・速度算出部11と、磁気方位センサ5と、傾斜センサ6と、動揺速度除去部15と、を備えている。GPSアンテナ4は、船舶に取り付けられ、GPS衛星からの測位用信号を受信する。GPS位置・速度算出部11は、測位用信号に基づいて、GPS速度を算出する。磁気方位センサ5は、船舶の船首方向の絶対方位を検出する。傾斜センサ6は、GPSアンテナ4の傾斜角を検出する。動揺速度除去部15は、絶対方位及び傾斜角に基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
【解決手段】本実施形態のGPS受信機2は、GPSアンテナ4と、GNSS位置・速度算出部11と、磁気方位センサ5と、傾斜センサ6と、動揺速度除去部15と、を備えている。GPSアンテナ4は、船舶に取り付けられ、GPS衛星からの測位用信号を受信する。GPS位置・速度算出部11は、測位用信号に基づいて、GPS速度を算出する。磁気方位センサ5は、船舶の船首方向の絶対方位を検出する。傾斜センサ6は、GPSアンテナ4の傾斜角を検出する。動揺速度除去部15は、絶対方位及び傾斜角に基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主として、GNSS受信機に関する。詳細には、GNSS受信機において、アンテナの動揺によるGNSS速度の誤差を除去するための構成に関する。
【背景技術】
【0002】
GNSS(Global Navigation Satelite System)衛星からの測位用信号をアンテナによって受信し、受信した測位用信号に基づいて、自装置の位置や速度を測定するGNSS受信機が知られている。このようなGNSS受信機は、例えば船舶等の移動体に搭載され、当該移動体の現在位置や移動速度を取得するために用いられる。
【0003】
一般に、アンテナは、電波が遮られない位置に設置されることが好ましい。このため、船舶等においては、アンテナはマスト頂上等の高い位置に取り付けられる。このようにアンテナが高い位置に設置されていると、時化などにより船体の動揺が激しくなった場合、船舶の重心位置に対してアンテナの位置が大きく動揺することとなる(図6(a)を参照のこと)。
【0004】
ここで、GNSS衛星からの測位信号に基づいて求めた移動速度をGNSS速度VGNSS、船舶の重心に対するアンテナの相対的な移動速度をVantとし、地球に対する船舶の重心の移動速度(真の船速)をVとする。GNSS速度VGNSSは、地球に対するアンテナの移動速度を測定したものであるから、速度ベクトルVGNSS,Vant,及びVの間には以下のような関係がある。
VGNSS=V+Vant
【0005】
船舶の正確な移動速度Vを検出するという観点からは、船舶の重心に対するアンテナの相対移動速度Vantは、誤差ないしノイズであるといえる。例えば真の船速Vの大きさが一定であっても、アンテナが動揺していれば、GNSS速度VGNSSは図6(b)に示すように変動してしまう。また、Vantが大きくなると(アンテナの動揺が激しくなると)、図6(c)のように、測定されたGNSS速度VGNSSの方向・大きさが、真の船速V(当該船舶の重心の速度)からかけ離れてしまうという問題があった。
【0006】
このようなアンテナの動揺によるVantの影響を除去するために低域通過フィルタを用いることも考えられるが、出力結果に遅延が生じてしまうため実用的では無い。
【0007】
この点、特許文献1は、船体の揺れ成分を減衰させるための狭帯域減衰フィルタを備えた船速測定用GPS受信装置を開示する。特許文献1は、これにより、計測された速度に遅れを発生させることなく、計測した速度から揺れ成分のみを除去することが可能であるとしている。
【0008】
また、特許文献2は、船体の傾斜角度を検出する傾斜角度検出部を備えたGPS航法装置を開示している。特許文献2は、前記傾斜角度と、アンテナの高さと、に基づいて、アンテナ位置の変動量を求め、規定時間の間におけるアンテナ位置の変動量によって、アンテナ位置変動速度を求めている。そして、特許文献2は、このようにして求めたアンテナ位置変動速度に応じて船舶測定速度を補正することにより、時化のように船舶の動揺が大きい場合でも、正確でしかも応答遅れが無く船速を測定することができるとしている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特許第2763707号公報
【特許文献2】特許第3807845号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし、上記特許文献1の構成は、船体動揺の周波数を逐次推定する必要がある。また、船体動揺の周波数が低い場合(低速航行時など)は、狭帯域減衰フィルタの減衰帯域を当該フィルタの追従性を保ったままで設定することが困難になると考えられる。
【0011】
一方、特許文献2の構成において、アンテナ位置の変動速度を求めるためには、アンテナの高さ(船体の重心から当該アンテナまでの距離)の設定若しくは推定を行う必要がある。しかしながら、一般に、船体の重心位置を求めることは困難である。
【0012】
本発明は以上の事情に鑑みてされたものであり、その主要な目的は、アンテナの動揺による速度測定値の誤差を遅延無く除去することが可能であり、しかも特別な設定作業等を行う必要が無いGNSS受信機を提供することにある。
【課題を解決するための手段及び効果】
【0013】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0014】
本発明の第1の観点によれば、以下の構成のGNSS受信機が提供される。即ち、このGNSS受信機は、アンテナと、GNSS速度算出部と、方位検出部と、傾斜角検出部と、動揺速度除去部と、を備える。前記アンテナは、移動体に取り付けられ、GNSS衛星からの測位用信号を受信する。前記GNSS速度算出部は、前記測位用信号に基づいて、GNSS速度を算出する。前記方位検出部は、前記移動体の前進方向の方位を検出する。前記傾斜角検出部は、前記アンテナの傾斜角を検出する。前記動揺速度除去部は、前記方位及び前記傾斜角に基づいて、前記アンテナの動揺による誤差を算出して前記GNSS速度から除去する。
【0015】
これにより、アンテナの動揺によるGNSS速度の誤差を除去し、移動体の正確な移動速度を得ることができる。また、ローパスフィルタ等を用いて誤差を除去する処理とは異なり、遅延は殆ど発生しない。更に、アンテナの揺動による誤差を除去するためのパラメータ(方位及び傾斜角)は、方位検出部及び傾斜角検出部によって容易に得ることができる。従って、当該パラメータを推定する演算等を行う必要が無く、オペレータが当該パラメータを設定する必要も無い。
【0016】
前記のGNSS受信機は、以下のように構成されることが好ましい。即ち、前記動揺速度除去部は、前記移動体の前進方向を正面側とした場合における前記GNSS速度の側方成分と上下方向成分とを、前記方位及び前記傾斜角に基づいて算出して、前記GNSS速度から除去する。
【0017】
即ち、移動体の前進方向と直交する速度成分はアンテナの揺動による誤差であるとみなすことができるので、当該誤差をGNSS速度から除去することにより、前記移動体の正確な速度を求めることができる。
【0018】
前記のGNSS受信機は、以下のように構成することもできる。即ち、前記動揺速度除去部は、前記移動体の前進方向を正面側とした場合における前記GNSS速度の側方成分を、前記方位及び前記傾斜角に基づいて算出して、前記GNSS速度から除去する。
【0019】
例えば船舶等の水平面内で移動する移動体の場合、アンテナの位置が上下に素早く動揺することは少ないと考えられるので、アンテナが上下に動揺することによる誤差は無視できる場合がある。このような場合は上記のように、アンテナの動揺による誤差としてGNSS速度の側方成分のみを考えても、十分な精度で正確な速度を得ることができる。
【0020】
前記のGNSS受信機において、前記移動体は、船舶であることが好ましい。
【0021】
即ち、特に船舶においては、時化若しくは低速航行などにより船体が動揺するので、これによりアンテナが動揺してGNSS速度の誤差が発生し易い。従って、船舶が備えるGNSS受信機に本発明の構成を適用することが特に有効である。
【0022】
本発明の第2の観点によれば、前記のGNSS受信機と、前記アンテナの揺動による誤差が除去された前記GNSS速度を表示する表示部と、を備える航法装置が提供される。
【0023】
このように、アンテナの揺動による誤差が除去されたGNSS速度(即ち、移動体の真の移動速度)を表示部に表示することにより、当該移動体の操縦者は、表示部の表示を確認して移動体の移動状況を正確に把握することができる。これにより、移動体を正確に運航させることができる。
【0024】
本発明の第3の観点によれば、以下の構成の信号処理装置が提供される。即ち、この信号処理装置は、アンテナが受信したGNSS衛星からの測位用信号に基づいて算出されたGNSS速度から、前記アンテナの動揺による誤差を除去する動揺速度除去部を備える。前記動揺速度除去部は、前記アンテナが取り付けられた移動体の前進方向の方位と、前記アンテナの傾斜角と、に基づいて、前記アンテナの動揺による誤差を算出して前記GNSS速度から除去する。
【0025】
これにより、アンテナの動揺によるGNSS速度の誤差を除去し、移動体の正確な移動速度を得ることができる。また、ローパスフィルタ等を用いて誤差を除去する処理とは異なり、遅延は殆ど発生しない。更に、アンテナの揺動による誤差を除去するためのパラメータ(方位及び傾斜角)は、適宜のセンサ等によって容易に得ることができる。従って、当該パラメータを推定する演算等を行う必要が無く、オペレータが当該パラメータを設定する必要も無い。
【0026】
本発明の第4の観点によれば、以下のGNSS速度補正プログラムが提供される。即ち、このGNSS速度補正プログラムは、GNSS速度算出ステップと、方位取得ステップと、傾斜角取得ステップと、動揺速度除去ステップと、を含む処理を信号処理装置に実行させるプログラムである。前記GNSS速度算出ステップでは、アンテナが受信したGNSS衛星からの測位用信号に基づいてGNSS速度を算出する。前記方位取得ステップでは、前記アンテナが取り付けられた移動体の前進方向の方位を取得する。前記傾斜角取得ステップでは、前記アンテナの傾斜角を取得する。前記動揺速度除去ステップでは、前記方位及び前記傾斜角に基づいて、前記アンテナの動揺による誤差を算出して前記GNSS速度から除去する。
【0027】
これにより、アンテナの動揺によるGNSS速度の誤差を除去し、移動体の正確な移動速度を得ることができる。また、ローパスフィルタ等を用いて誤差を除去する処理とは異なり、遅延は殆ど発生しない。更に、アンテナの揺動による誤差を除去するためのパラメータ(方位及び傾斜角)は、適宜のセンサ等によって容易に得ることができる。従って、当該パラメータを推定する演算等を行う必要が無く、当該パラメータを設定する必要も無い。
【0028】
本発明の第5の観点によれば、以下のGNSS速度補正方法が提供される。即ち、このGNSS速度補正方法は、GNSS速度補正工程と、方位取得工程と、傾斜角取得工程と、動揺速度除去工程と、を含む。前記GNSS速度算出工程では、アンテナが受信したGNSS衛星からの測位用信号に基づいてGNSS速度を算出する。前記方位取得工程では、前記アンテナが取り付けられた移動体の前進方向の方位を取得する。前記傾斜角取得工程では、前記アンテナの傾斜角を取得する。前記動揺速度除去工程では、前記方位及び前記傾斜角に基づいて、前記アンテナの動揺による誤差を算出して前記GNSS速度から除去する。
【0029】
これにより、アンテナの動揺によるGNSS速度の誤差を除去し、移動体の正確な移動速度を得ることができる。また、ローパスフィルタ等を用いて誤差を除去する方法とは異なり、遅延は殆ど発生しない。更に、アンテナの揺動による誤差を除去するためのパラメータ(方位及び傾斜角)は、適宜のセンサ等によって容易に得ることができる。従って、当該パラメータを推定する演算等を行う必要が無く、当該パラメータを設定する必要も無い。
【図面の簡単な説明】
【0030】
【図1】本発明の一実施形態に係る航法装置の構成を示すブロック図。
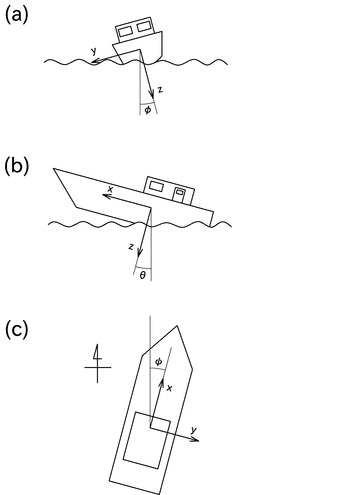
【図2】(a)ロール角を説明するための船体の正面図。(b)ピッチ角を説明するための船体の右側面図。(c)ヘディング角を説明するための船体の平面図。
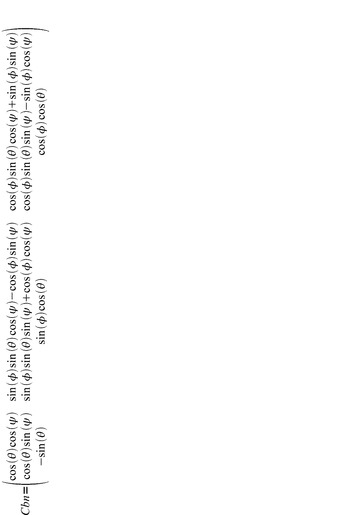
【図3】座標変換行列を求める式。
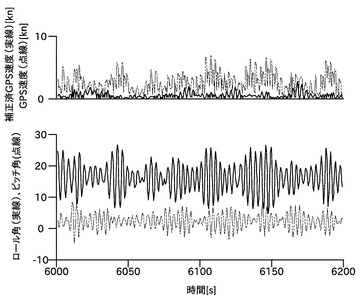
【図4】本実施形態の航法装置によって実際にGPS速度の補正を行った結果を示すグラフ。
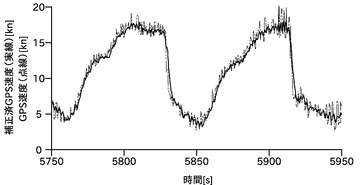
【図5】急発進、急停止時にGPS速度の補正を行った結果を示すグラフ。
【図6】(a)アンテナが動揺する様子を示す模式図。(b)アンテナの動揺によるGNSS速度の変動を説明するグラフ。(c)アンテナの動揺によるGNSS速度の誤差を説明する図。
【発明を実施するための形態】
【0031】
次に、図面を参照して本発明の実施の形態を説明する。図1は本発明に係る船舶用航法装置1の構成を示すブロック図である。
【0032】
本実施形態の航法装置1は、GPS受信機(GNSS受信機)2と、表示部3と、を備えている。
【0033】
GPS受信機2は、複数のGPS(Global Positioning System)衛星からの測位用信号を受信し、当該測位用信号に基づいて、自装置の位置や移動速度(即ち、航法装置1が設置されている船舶の位置や移動速度)を検出して表示部3に出力するように構成されている。
【0034】
具体的には、GPS受信機2は、GPSアンテナ4と、磁気方位センサ(方位検出部)5と、傾斜センサ(傾斜角検出部)6と、信号処理装置7と、を備えている。
【0035】
GPSアンテナ4は、GPS衛星からの測位用信号を受信するように構成され、例えばマストの頂上など、電波が遮られないような高い位置に設置される。GPS信号が受信した測位用信号は、信号処理装置7に出力される。
【0036】
磁気方位センサ5は、航法装置1が設置されている船舶の船首方向(船首が向いている方向)を、地球基準の絶対的な方位で検出するように構成されている。一般的に、船舶は、船首方向へ向かって前進する。従って、磁気方位センサ5は、船体の前進方向の方位を検出していると言うこともできる。なお船舶は、波や風等の外乱の影響により、船首方向からズレた方向に向けて進行する場合がある。本明細書において、「前進方向」と言った場合は、波や風等の外乱の影響を受けないと考えた場合に船体が進むべき方向(即ち船首方向)のことをいう。磁気方位センサ5による検出結果は、信号処理装置7に出力される。
【0037】
傾斜センサ6は、航法装置1が設置されている船舶の船体の傾斜角度を検出するように構成されている。なお、船体が傾くことによりGPSアンテナ4も同様に傾くことから、傾斜センサ6はGPSアンテナ4の傾きを検出していると言うこともできる。傾斜センサ6による検出結果は、信号処理装置7に出力される。
【0038】
信号処理装置7は、図略のCPU、ROM、RAM等のハードウェアと、前記ROMに記憶されたプログラム等のソフトウェアと、から構成されている。
【0039】
前記プログラムには、本実施形態に係るGNSS速度補正方法を信号処理装置7によって実現するための、GNSS速度補正プログラムが含まれている。
【0040】
前記GNSS速度補正方法は、GPS位置算出工程と、GPS速度算出工程(GNSS速度算出工程)と、方位取得工程と、傾斜角取得工程と、変換行列算出工程と、動揺速度除去工程と、を含んでいる。従って、前記GNSS速度補正プログラムは、前記各工程に対応して、GPS位置算出ステップと、GPS速度算出ステップ(GNSS速度算出ステップ)と、方位取得ステップと、傾斜角取得ステップと、変換行列算出ステップと、動揺速度除去ステップと、を含んでいる。
【0041】
そして、前記ハードウェアと前記ソフトウェアとが協働して動作することにより、信号処理装置7を、GPS位置・速度算出部(GNSS速度算出部)11、方位取得部12、傾斜角取得部13、変換行列算出部14及び動揺速度除去部15として機能させることができるようになっている。
【0042】
GPS位置・速度算出部11は、GPSアンテナ4が受信した測位用信号に基づいて、当該GPSアンテナ4の地球に対する絶対位置であるGPS位置と、当該GPSアンテナ4の地球に対する移動速度であるGPS速度(GNSS速度)と、を求めるように構成されている。なお、このGPS位置・速度算出部11の処理内容は、前記GNSS速度補正プログラムのGPS位置算出ステップ及びGPS速度算出ステップに対応している。
【0043】
本実施形態において、前記GPS速度は、北方向をX軸、東方向をY軸、地球中心方向をZ軸とする直交座標で定義された局地座標系(NED系)における速度ベクトルとして求められるものとする。なお、GPS衛星からの測位用信号に基づくGPS速度の算出方法としては、疑似距離の時間変化に基づいた方法と、搬送波のドップラ効果を利用する方法とが公知であるが、何れの方法を用いても良い。
【0044】
方位取得部12は、磁気方位センサ5からの出力信号に基づいて、船体のヘディング角ψ(船首方向の絶対方位)を取得するように構成されている。なお、方位取得部12の処理内容は、前記GNSS速度補正プログラムの方位取得ステップに対応している。
【0045】
傾斜角取得部13は、傾斜センサ6からの出力信号に基づいて、船体のピッチ角θ(ピッチ方向の傾斜角)及びロール角φ(ロール方向の傾斜角)を取得するように構成されている。なお、この傾斜角取得部13の処理内容は、前記GNSS速度補正プログラムの傾斜角取得ステップに対応している。
【0046】
ここで、ヘディング角ψ、ピッチ角θ及びロール角φの定義は以下のようなものである。即ち、図2のように、本実施形態の航法装置1が設置されている船舶の船首方向をx軸、舷側右方向をy軸、船体の下方向をz軸とする直交座標の船舶座標系(ボディ系)を定義する。そして、船体のx軸周りの傾斜角をロール角φ、y軸周りの傾斜角をピッチ角θとする。また、船首方向と北方向とのズレをヘディング角ψとする。
【0047】
変換行列算出部14は、前記方位取得部12が取得したヘディング角ψと、傾斜角取得部13が取得したピッチ角θ及びロール角φと、に基づいて、ボディ系からNED系への座標変換行列Cbnを求める。ヘディング角ψ、ピッチ角θ及びロール角φと、座標変換行列Cbnとの関係は、図3のとおりである。なお、この変換行列算出部14の処理内容は、前記GNSS速度補正プログラムの変換行列算出ステップに対応している。
【0048】
動揺速度除去部15は、ヘディング角ψ、ピッチ角θ及びロール角φに基づいて求められた前記座標変換行列Cbnに基づいて、GPSアンテナ4の動揺による誤差をGPS速度から除去し、補正済GPS速度を求めるように構成されている(具体的な処理内容は後述する)。なお、この動揺速度除去部15の処理内容は、前記GNSS速度補正プログラムの動揺速度除去ステップに対応している。
【0049】
GPS受信機2は、以上のようにして求めたGPS位置及び補正済GPS速度を、表示部3に出力する。
【0050】
表示部3は、具体的にはGPSプロッタとして構成されており、液晶ディスプレイを備えている。表示部3は、前記GPS位置に基づいて、地図上における自船の位置を液晶ディスプレイにグラフィカルに表示することができる。また表示部3は、この液晶ディスプレイに、GPS受信機2から入力された補正済GPS速度を表示することができるように構成されている。このように本実施形態では、GPSアンテナ4の動揺による誤差をGPS速度から除去して表示部3に表示することができる。従って、航法装置1のオペレータは、表示部3の表示内容を確認することにより正確な船速を把握することができる。
【0051】
次に、動揺速度除去部15における処理内容について具体的に説明する。
【0052】
前述のように、GPS位置・速度算出部11で算出されたGPS速度VGPSは、地球に対するGPSアンテナの移動速度であるため、当該GPSアンテナ4の動揺による誤差を含んでいる。即ち、GPS速度VGPSは、真の船速V(船の重心の地球に対する移動速度)と、船の重心に対するGPSアンテナ4の相対速度Vant(誤差)を合成したものであると言える。なお以下の説明では、船の重心に対するGPSアンテナ4の相対速度Vantを、アンテナ動揺速度と呼ぶ。
VGPS=V+Vant ・・・(1)
【0053】
従って、GPS速度VGPSから、アンテナ動揺速度Vantを誤差として除去することにより、真の船速Vを求めることができる。
V=VGPS−Vant ・・・(2)
【0054】
ここで、GPSアンテナ4は、船体の動揺によって、船首方向を正面側としたときの船体側方及び上下方向(船首方向と直交する方向)に移動することから、これをGPSアンテナ4の動揺による誤差(アンテナ動揺速度Vant)として算出している。
【0055】
つまり、船首方向と直交する平面内の速度成分(アンテナ動揺速度Vant)は、舷側方向(船首方向を正面側としたときの船体側方、即ちボディ系のy軸と平行な方向)のアンテナ移動速度VGPS_Edyと、上下方向(ボディ系のz軸と平行な方向)のアンテナ移動速度VGPS_Edzと、を合成することにより求めることができる。
Vant=VGPS_Edy+VGPS_Edz ・・・(3)
【0056】
舷側方向のアンテナ移動速度VGPS_Edyは、舷側方向(y軸方向)の単位ベクトルEdyに対するGPS速度VGPSの投影によって求めることができる。
VGPS_Edy=(Edy・VGPS)Edy ・・・(4)
なお、(Edy・VGPS)は内積である。
【0057】
上記の式(4)において、y軸方向の単位ベクトルEdyは、ボディ系で表現したy軸方向の単位ベクトル(0,1,0)をNED系に変換することで得ることができる。具体的には、Edyは、以下の式で求めることができる。
Edy=Cbn×(0,1,0)t ・・・(5)
【0058】
また、上下方向のアンテナ移動速度VGPS_Edzは、上下方向(z軸方向)の単位ベクトルEdzに対するGPS速度VGPSの投影によって求めることができる。
VGPS_Edz=(Edz・VGPS)Edz ・・・(6)
なお、(Edz・VGPS)は内積である。
【0059】
上記の式(6)において、z軸方向の単位ベクトルEdzは、ボディ系で表現したz軸方向の単位ベクトル(0,0,1)をNED系に変換することで得ることができる。具体的には、Edzは、以下の式で求めることができる。
Edz=Cbn×(0,0,1)t ・・・(7)
【0060】
従って、動揺速度除去部15における処理内容は、以下のとおりである。即ち、動揺速度除去部15は、まず、変換行列算出部14で求めた座標変換行列Cbnを式(5),(7)に代入することによって、単位ベクトルEdy,Edzを求める。続いて、動揺速度除去部15は、式(4)によって舷側方向のアンテナ移動速度VGPS_Edyを、式(6)によって上下方向のアンテナ移動速度VGPS_Edzを、それぞれ求める。そして、動揺速度除去部15は、式(3)によってアンテナ動揺速度Vant(GPSアンテナ4の動揺による速度誤差)を算出した後、式(2)によってGPS速度VGPSを補正することにより、真の船速(補正済GPS速度)Vを求める。
【0061】
以上のように、動揺速度除去部15は、船首方向の絶対方位(ヘディング角ψ)と、GPSアンテナ4の傾斜角(ピッチ角θ及びロール角φ)と、に基づいて求められた座標変換行列Cbnに基づいて、真の船速(補正済GPS速度)Vを算出するように構成されている。
【0062】
このように、本実施形態の航法装置1は、船体の船首方向の絶対方位と、GPSアンテナ4の傾斜角とを測定するだけで、GPS速度の補正を行うことができる。即ち、特許文献1とは異なり、船体の動揺周波数を推定する必要が無い。また、特許文献2とは異なり、GPS速度の補正を行うためにアンテナの高さに関する情報が必要無い。
【0063】
従って、本実施形態の航法装置1によれば、船の種類、積荷の状況や天候状況による動揺周波数の変化にかかわらず、常に適切にGPS速度の補正を行うことができる。また、正確な値を得ることが困難なアンテナ高さの情報を必要としないので、正確な補正結果を簡単に得ることができる。
【0064】
次に、本実施形態の航法装置1を用いて実際にGPS速度の補正を行った様子について説明する。
【0065】
本願発明者らは、本実施形態の航法装置1の効果を確認するため、実際の船舶に航法装置1を設置し、洋上停泊時においてGPS速度の補正を行った。このときに測定されたGPS速度(補正前の速度)、ピッチ角、ロール角、及び、航法装置1によって補正されたGPS速度(補正済GPS速度)を、図4のグラフに示す。
【0066】
図4の上側のグラフには、洋上停泊時に測定したGPS速度VGPS(補正前の速度)の時間変化が点線で示されている。また、同じく図4の上側のグラフには、前記GPS速度VGPSを本実施形態の航法装置1で補正することにより求めた、真の船速(補正済GPS速度)Vが実線で示されている。また、図4の下側のグラフには、このときのロール角の時間変化(実線)と、ピッチ角の時間変化(点線)と、がそれぞれ示されている。
【0067】
図4に示すGPS速度VGPSは停泊中に測定したものであるから、本来なら一定の値(速度ゼロ)を示すべきであるが、実際にはグラフに示すように大きく動揺している。これは、既に説明した通り、波などの影響により船体が動揺することで、GPSアンテナ4が動揺し、その結果アンテナ動揺速度Vantが誤差として含まれてしまうためである。
【0068】
一方、グラフに示すように、本実施形態の航法装置1が出力した補正済GPS速度Vは、GPS速度VGPS(補正前の速度)に比べて、正確な船速(速度ゼロ)に近いことが分かる。即ち、本実施形態の航法装置1によってGPS速度を補正することにより、アンテナの動揺による誤差を低減できることが確認された。
【0069】
なお、図4のグラフからわかるように、今回の実験で得られた補正済GPS速度Vは、GPS速度VGPS(補正前の速度)に比べて大幅に誤差を低減することができてはいるものの、正確な値(速度ゼロ)で一定の値とはなっておらず、ピッチ角の変動と同期して若干の変動がみられる。即ち、本実施形態の航法装置1では、ピッチ角の変動と同期したGPS速度の誤差を完全には除去することができない場合がある。しかしながら、例えば漁船が底曳き網漁を行っている場合は、低速航行時であっても船体で網を引っ張っているので、ピッチ方向の船体の動揺はかなり低減されると考えられる。従って、底曳き網漁船の場合は、本実施形態の航法装置1によって特に正確にGPS速度を補正することができる。
【0070】
また本願発明者らは、本実施形態の航法装置1によってGPS速度を補正することによる遅延の有無について検証するため、航法装置1を搭載した船舶の急発進及び急停止を行った。このときの様子を図5のグラフに示す。
【0071】
図5のグラフには、急発進及び急停止を行った時に測定したGPS速度VGPS(補正前の速度)の時間変化が点線で示されている。また、同じく図5のグラフには、前記GPS速度VGPSを本実施形態の航法装置1で補正することにより求めた、真の船速(補正済GPS速度)Vが実線で示されている。
【0072】
図5のグラフからわかるように、補正済GPS速度Vは、GPS速度VGPSの変化に対して殆ど遅れていない。この点、例えばローパスフィルタによってアンテナ動揺による速度誤差を除去しようとした場合、当該ローパスフィルタの出力は元のGPS速度VGPSに対して5秒程度遅れてしまう。以上のように、本実施形態の航法装置1は、ローパスフィルタ等の従来技術と比べて、殆ど遅延無くGPS速度の誤差を除去することができることが確認できた。
【0073】
以上で説明したように、本実施形態のGPS受信機2は、GPSアンテナ4と、GNSS位置・速度算出部11と、磁気方位センサ5と、傾斜センサ6と、動揺速度除去部15と、を備えている。GPSアンテナ4は、船舶に取り付けられ、GPS衛星からの測位用信号を受信する。GPS位置・速度算出部11は、測位用信号に基づいて、GPS速度を算出する。磁気方位センサ5は、船舶の船首方向の方位を検出する。傾斜センサ6は、GPSアンテナ4の傾斜角を検出する。動揺速度除去部15は、方位及び傾斜角に基づいて求めた座標変換行列Cbnに基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
【0074】
これにより、GPSアンテナ4の動揺によるGPS速度の誤差を除去し、船舶の正確な移動速度を得ることができる。また、ローパスフィルタ等を用いて誤差を除去する処理とは異なり、遅延は殆ど発生しない。更に、GPSアンテナ4の揺動による誤差を除去するためのパラメータ(方位及び傾斜角)は、磁気方位センサ5及び傾斜センサ6によって容易に得ることができる。従って、当該パラメータを推定する演算等を行う必要が無く、オペレータが当該パラメータを設定する必要も無い。
【0075】
また、本実施形態のGPS受信機2は、以下のように構成されている。即ち、動揺速度除去部15は、船舶の船首方向を正面側とした場合におけるGPS速度の側方成分と上下方向成分とを、方位及び傾斜角に基づいて求めた座標変換行列Cbnに基づいて算出する。そして、動揺速度除去部15は、GPS速度の側方成分と上下方向成分を、GPS速度から除去する。
【0076】
即ち、船舶の船首方向と直交する速度成分はGPSアンテナ4の揺動による誤差であるとみなすことができるので、当該誤差をGPS速度から除去することにより、船舶の正確な速度を求めることができる。
【0077】
また、本実施形態のGPS受信機2は、船舶に搭載されている。
【0078】
即ち、特に船舶においては、時化若しくは低速航行などにより船体が動揺するので、これによりGPSアンテナ4が動揺してGPS速度の誤差が発生し易い。従って、本実施形態のGPS受信機2によって、船舶に取り付けられたGPSアンテナ4の動揺に基づく速度の誤差を除去することが特に有効である。
【0079】
また、本実施形態の航法装置1は、GPS受信機2と、GPSアンテナ4の揺動による誤差が除去された前記GPS速度を表示する表示部3と、を備えている。
【0080】
このように、GPSアンテナ4の揺動による誤差が除去された補正済GPS速度(即ち、船舶の真の移動速度)を表示部3に表示することにより、船舶の操縦者は、表示部の表示を確認して船舶の移動状況を正確に把握することができる。これにより、船舶を正確に運航させることができる。
【0081】
また、本実施形態の信号処理装置7は、以下のように構成されている。即ち、この信号処理装置7は、GPSアンテナ4が受信したGPS衛星からの測位用信号に基づいて算出されたGPS速度から、GPSアンテナ4の動揺による誤差を除去する動揺速度除去部15を備える。動揺速度除去部15は、GPSアンテナ4が取り付けられた船舶の船首方向の方位と、GPSアンテナ4の傾斜角と、に基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
【0082】
また、本実施形態のGNSS速度補正プログラムは、GPS速度算出ステップと、方位取得ステップと、傾斜角取得ステップと、動揺速度除去ステップと、を含む処理を信号処理装置に実行させるプログラムである。GPS速度算出ステップでは、GPSアンテナ4が受信したGPS衛星からの測位用信号に基づいてGPS速度を算出する。方位取得ステップでは、前記GPSアンテナが取り付けられた船舶の船首方向の方位を取得する。傾斜角取得ステップでは、GPSアンテナ4の傾斜角を取得する。動揺速度除去ステップでは、方位及び傾斜角に基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
【0083】
また、本実施形態のGNSS速度補正方法は、GPS速度補正工程と、方位取得工程と、傾斜角取得工程と、動揺速度除去工程と、を含んでいる。GPS速度算出工程では、GPSアンテナ4が受信したGPS衛星からの測位用信号に基づいてGPS速度を算出する。方位取得工程では、GPSアンテナ4が取り付けられた船舶の船首方向の方位を取得する。傾斜角取得工程では、GPSアンテナの傾斜角を取得する。動揺速度除去工程では、方位及び傾斜角に基づいて、GPSアンテナ4の動揺による誤差を算出して前記GPS速度から除去する。
【0084】
次に、上記実施形態の変形例について説明する。
【0085】
本変形例は、上記実施例の式(3)に代えて、以下の式(3)’によってアンテナ動揺速度Vantを求めるものである。
Vant=VGPS_Edy ・・・(3)’
【0086】
即ち、船舶のように水平面上を移動する移動体においては、上下方向のアンテナ移動速度VGPS_Edzはそれほど大きくならないため、無視することができる場合である。この場合、式(3)’のように、舷側方向のアンテナ移動速度VGPS_Edyをアンテナ動揺速度Vantとすれば良い。
【0087】
このように、上下方向のアンテナ移動速度VGPS_Edzを無視することにより、上記実施形態の式(6),(7)の演算を省略することができるので、演算負荷を低減することができる。なお、本願発明者らが本変形例の航法装置を船舶に設置し、実際にGPS速度を補正する実験を行った結果、上下方向のアンテナ移動速度VGPS_Edzを考慮した場合と殆ど変わらない結果が得られることが確認できている。
【0088】
以上で説明したように、本変形例のGPS受信機は、以下のように構成されている。即ち、動揺速度除去部15は、船舶の船首方向を正面側とした場合におけるGPS速度の側方成分を、方位及び傾斜角に基づいて求めた座標変換行列Cbnに基づいて算出する。そして、動揺速度除去部15は、GPS速度の側方成分を、GPS速度から除去する。
【0089】
例えば船舶等の水平面内で移動する移動体の場合、GPSアンテナ4の位置が上下に素早く動揺することは少ないと考えられるので、GPSアンテナが上下に動揺することによる誤差は無視できる場合がある。このような場合は上記のように、アンテナの動揺による誤差としてGNSS速度の側方成分のみを考えても、十分な精度で正確な速度を得ることができる。
【0090】
以上に本発明の好適な実施の形態(及び変形例)を説明したが、上記の構成は例えば以下のように変更することができる。
【0091】
上記実施形態では、GNSSの一例としてGPSを用いた実施例を説明したが、他のGNSSを用いる構成であっても良いことは勿論である。
【0092】
上記実施形態では、磁気方位センサを方位検出部、傾斜センサを傾斜角検出部としたが、これに限らず、船首方位と傾斜角を検出できる構成であれば他の形式のセンサを方位検出部及び傾斜角検出部として採用することができる。例えば、磁気方位センサ及び傾斜センサに代え、あるいはこれらに加えて、角速度センサや加速度センサなどを組み合わせて船首方位と傾斜角を検出するように構成することができる。
【0093】
上記実施形態では、GPS受信機が備えたセンサが方位及び傾斜角を検出する構成としたが、この構成に限らず、GPS受信機の外部の機器(例えば慣性航法装置)が方位及び傾斜角を検出する構成でも良い。この場合、前記慣性航法装置が検出した方位及び傾斜角を示すデータが、信号処理装置に入力される。
【0094】
上記計算式は一例であって、この計算式に限定されるものではない。例えば、上記実施形態では、ボディ系とNED系を用いて速度ベクトルの演算を行っているが、速度ベクトルの演算は任意の座標系に変換して行うことができるのは勿論である。
【0095】
上記実施形態では、信号処理装置7が備える各構成(GPS速度算出部、方位取得部12、傾斜角取得部13、変換行列算出部、動揺速度除去部15等)を、ソフトウェアとハードウェアとの協働により実現している。この構成に代え、信号処理装置7が備える各構成の全部又は一部を、専用のハードウェアで実現しても良い。
【0096】
本発明の航法装置は、船舶に限らず、飛行機、自動車等の任意の移動体に搭載することができる。例えば、飛行機の場合においては、機首が向いている方向が前進方向であり、自動車の場合は、車体正面が向いている方向が前進方向であると言える。ただし、船舶の場合は、GPSアンテナがマスト頂上等の高い位置に設置される傾向があり、しかも波等によって船体が動揺するため、アンテナの動揺による誤差が発生し易いという事情がある。従って、本発明の航法装置を船舶に搭載することにより、特に大きな効果を発揮することができる。
【符号の説明】
【0097】
1 航法装置
2 GPS受信機(GNSS受信機)
3 表示部
4 GPSアンテナ(アンテナ)
5 磁気方位センサ(方位検出部)
6 傾斜センサ(傾斜角取得部)
7 信号処理装置
11 GPS位置・速度算出部
15 動揺速度除去部
【技術分野】
【0001】
本発明は、主として、GNSS受信機に関する。詳細には、GNSS受信機において、アンテナの動揺によるGNSS速度の誤差を除去するための構成に関する。
【背景技術】
【0002】
GNSS(Global Navigation Satelite System)衛星からの測位用信号をアンテナによって受信し、受信した測位用信号に基づいて、自装置の位置や速度を測定するGNSS受信機が知られている。このようなGNSS受信機は、例えば船舶等の移動体に搭載され、当該移動体の現在位置や移動速度を取得するために用いられる。
【0003】
一般に、アンテナは、電波が遮られない位置に設置されることが好ましい。このため、船舶等においては、アンテナはマスト頂上等の高い位置に取り付けられる。このようにアンテナが高い位置に設置されていると、時化などにより船体の動揺が激しくなった場合、船舶の重心位置に対してアンテナの位置が大きく動揺することとなる(図6(a)を参照のこと)。
【0004】
ここで、GNSS衛星からの測位信号に基づいて求めた移動速度をGNSS速度VGNSS、船舶の重心に対するアンテナの相対的な移動速度をVantとし、地球に対する船舶の重心の移動速度(真の船速)をVとする。GNSS速度VGNSSは、地球に対するアンテナの移動速度を測定したものであるから、速度ベクトルVGNSS,Vant,及びVの間には以下のような関係がある。
VGNSS=V+Vant
【0005】
船舶の正確な移動速度Vを検出するという観点からは、船舶の重心に対するアンテナの相対移動速度Vantは、誤差ないしノイズであるといえる。例えば真の船速Vの大きさが一定であっても、アンテナが動揺していれば、GNSS速度VGNSSは図6(b)に示すように変動してしまう。また、Vantが大きくなると(アンテナの動揺が激しくなると)、図6(c)のように、測定されたGNSS速度VGNSSの方向・大きさが、真の船速V(当該船舶の重心の速度)からかけ離れてしまうという問題があった。
【0006】
このようなアンテナの動揺によるVantの影響を除去するために低域通過フィルタを用いることも考えられるが、出力結果に遅延が生じてしまうため実用的では無い。
【0007】
この点、特許文献1は、船体の揺れ成分を減衰させるための狭帯域減衰フィルタを備えた船速測定用GPS受信装置を開示する。特許文献1は、これにより、計測された速度に遅れを発生させることなく、計測した速度から揺れ成分のみを除去することが可能であるとしている。
【0008】
また、特許文献2は、船体の傾斜角度を検出する傾斜角度検出部を備えたGPS航法装置を開示している。特許文献2は、前記傾斜角度と、アンテナの高さと、に基づいて、アンテナ位置の変動量を求め、規定時間の間におけるアンテナ位置の変動量によって、アンテナ位置変動速度を求めている。そして、特許文献2は、このようにして求めたアンテナ位置変動速度に応じて船舶測定速度を補正することにより、時化のように船舶の動揺が大きい場合でも、正確でしかも応答遅れが無く船速を測定することができるとしている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特許第2763707号公報
【特許文献2】特許第3807845号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし、上記特許文献1の構成は、船体動揺の周波数を逐次推定する必要がある。また、船体動揺の周波数が低い場合(低速航行時など)は、狭帯域減衰フィルタの減衰帯域を当該フィルタの追従性を保ったままで設定することが困難になると考えられる。
【0011】
一方、特許文献2の構成において、アンテナ位置の変動速度を求めるためには、アンテナの高さ(船体の重心から当該アンテナまでの距離)の設定若しくは推定を行う必要がある。しかしながら、一般に、船体の重心位置を求めることは困難である。
【0012】
本発明は以上の事情に鑑みてされたものであり、その主要な目的は、アンテナの動揺による速度測定値の誤差を遅延無く除去することが可能であり、しかも特別な設定作業等を行う必要が無いGNSS受信機を提供することにある。
【課題を解決するための手段及び効果】
【0013】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0014】
本発明の第1の観点によれば、以下の構成のGNSS受信機が提供される。即ち、このGNSS受信機は、アンテナと、GNSS速度算出部と、方位検出部と、傾斜角検出部と、動揺速度除去部と、を備える。前記アンテナは、移動体に取り付けられ、GNSS衛星からの測位用信号を受信する。前記GNSS速度算出部は、前記測位用信号に基づいて、GNSS速度を算出する。前記方位検出部は、前記移動体の前進方向の方位を検出する。前記傾斜角検出部は、前記アンテナの傾斜角を検出する。前記動揺速度除去部は、前記方位及び前記傾斜角に基づいて、前記アンテナの動揺による誤差を算出して前記GNSS速度から除去する。
【0015】
これにより、アンテナの動揺によるGNSS速度の誤差を除去し、移動体の正確な移動速度を得ることができる。また、ローパスフィルタ等を用いて誤差を除去する処理とは異なり、遅延は殆ど発生しない。更に、アンテナの揺動による誤差を除去するためのパラメータ(方位及び傾斜角)は、方位検出部及び傾斜角検出部によって容易に得ることができる。従って、当該パラメータを推定する演算等を行う必要が無く、オペレータが当該パラメータを設定する必要も無い。
【0016】
前記のGNSS受信機は、以下のように構成されることが好ましい。即ち、前記動揺速度除去部は、前記移動体の前進方向を正面側とした場合における前記GNSS速度の側方成分と上下方向成分とを、前記方位及び前記傾斜角に基づいて算出して、前記GNSS速度から除去する。
【0017】
即ち、移動体の前進方向と直交する速度成分はアンテナの揺動による誤差であるとみなすことができるので、当該誤差をGNSS速度から除去することにより、前記移動体の正確な速度を求めることができる。
【0018】
前記のGNSS受信機は、以下のように構成することもできる。即ち、前記動揺速度除去部は、前記移動体の前進方向を正面側とした場合における前記GNSS速度の側方成分を、前記方位及び前記傾斜角に基づいて算出して、前記GNSS速度から除去する。
【0019】
例えば船舶等の水平面内で移動する移動体の場合、アンテナの位置が上下に素早く動揺することは少ないと考えられるので、アンテナが上下に動揺することによる誤差は無視できる場合がある。このような場合は上記のように、アンテナの動揺による誤差としてGNSS速度の側方成分のみを考えても、十分な精度で正確な速度を得ることができる。
【0020】
前記のGNSS受信機において、前記移動体は、船舶であることが好ましい。
【0021】
即ち、特に船舶においては、時化若しくは低速航行などにより船体が動揺するので、これによりアンテナが動揺してGNSS速度の誤差が発生し易い。従って、船舶が備えるGNSS受信機に本発明の構成を適用することが特に有効である。
【0022】
本発明の第2の観点によれば、前記のGNSS受信機と、前記アンテナの揺動による誤差が除去された前記GNSS速度を表示する表示部と、を備える航法装置が提供される。
【0023】
このように、アンテナの揺動による誤差が除去されたGNSS速度(即ち、移動体の真の移動速度)を表示部に表示することにより、当該移動体の操縦者は、表示部の表示を確認して移動体の移動状況を正確に把握することができる。これにより、移動体を正確に運航させることができる。
【0024】
本発明の第3の観点によれば、以下の構成の信号処理装置が提供される。即ち、この信号処理装置は、アンテナが受信したGNSS衛星からの測位用信号に基づいて算出されたGNSS速度から、前記アンテナの動揺による誤差を除去する動揺速度除去部を備える。前記動揺速度除去部は、前記アンテナが取り付けられた移動体の前進方向の方位と、前記アンテナの傾斜角と、に基づいて、前記アンテナの動揺による誤差を算出して前記GNSS速度から除去する。
【0025】
これにより、アンテナの動揺によるGNSS速度の誤差を除去し、移動体の正確な移動速度を得ることができる。また、ローパスフィルタ等を用いて誤差を除去する処理とは異なり、遅延は殆ど発生しない。更に、アンテナの揺動による誤差を除去するためのパラメータ(方位及び傾斜角)は、適宜のセンサ等によって容易に得ることができる。従って、当該パラメータを推定する演算等を行う必要が無く、オペレータが当該パラメータを設定する必要も無い。
【0026】
本発明の第4の観点によれば、以下のGNSS速度補正プログラムが提供される。即ち、このGNSS速度補正プログラムは、GNSS速度算出ステップと、方位取得ステップと、傾斜角取得ステップと、動揺速度除去ステップと、を含む処理を信号処理装置に実行させるプログラムである。前記GNSS速度算出ステップでは、アンテナが受信したGNSS衛星からの測位用信号に基づいてGNSS速度を算出する。前記方位取得ステップでは、前記アンテナが取り付けられた移動体の前進方向の方位を取得する。前記傾斜角取得ステップでは、前記アンテナの傾斜角を取得する。前記動揺速度除去ステップでは、前記方位及び前記傾斜角に基づいて、前記アンテナの動揺による誤差を算出して前記GNSS速度から除去する。
【0027】
これにより、アンテナの動揺によるGNSS速度の誤差を除去し、移動体の正確な移動速度を得ることができる。また、ローパスフィルタ等を用いて誤差を除去する処理とは異なり、遅延は殆ど発生しない。更に、アンテナの揺動による誤差を除去するためのパラメータ(方位及び傾斜角)は、適宜のセンサ等によって容易に得ることができる。従って、当該パラメータを推定する演算等を行う必要が無く、当該パラメータを設定する必要も無い。
【0028】
本発明の第5の観点によれば、以下のGNSS速度補正方法が提供される。即ち、このGNSS速度補正方法は、GNSS速度補正工程と、方位取得工程と、傾斜角取得工程と、動揺速度除去工程と、を含む。前記GNSS速度算出工程では、アンテナが受信したGNSS衛星からの測位用信号に基づいてGNSS速度を算出する。前記方位取得工程では、前記アンテナが取り付けられた移動体の前進方向の方位を取得する。前記傾斜角取得工程では、前記アンテナの傾斜角を取得する。前記動揺速度除去工程では、前記方位及び前記傾斜角に基づいて、前記アンテナの動揺による誤差を算出して前記GNSS速度から除去する。
【0029】
これにより、アンテナの動揺によるGNSS速度の誤差を除去し、移動体の正確な移動速度を得ることができる。また、ローパスフィルタ等を用いて誤差を除去する方法とは異なり、遅延は殆ど発生しない。更に、アンテナの揺動による誤差を除去するためのパラメータ(方位及び傾斜角)は、適宜のセンサ等によって容易に得ることができる。従って、当該パラメータを推定する演算等を行う必要が無く、当該パラメータを設定する必要も無い。
【図面の簡単な説明】
【0030】
【図1】本発明の一実施形態に係る航法装置の構成を示すブロック図。
【図2】(a)ロール角を説明するための船体の正面図。(b)ピッチ角を説明するための船体の右側面図。(c)ヘディング角を説明するための船体の平面図。
【図3】座標変換行列を求める式。
【図4】本実施形態の航法装置によって実際にGPS速度の補正を行った結果を示すグラフ。
【図5】急発進、急停止時にGPS速度の補正を行った結果を示すグラフ。
【図6】(a)アンテナが動揺する様子を示す模式図。(b)アンテナの動揺によるGNSS速度の変動を説明するグラフ。(c)アンテナの動揺によるGNSS速度の誤差を説明する図。
【発明を実施するための形態】
【0031】
次に、図面を参照して本発明の実施の形態を説明する。図1は本発明に係る船舶用航法装置1の構成を示すブロック図である。
【0032】
本実施形態の航法装置1は、GPS受信機(GNSS受信機)2と、表示部3と、を備えている。
【0033】
GPS受信機2は、複数のGPS(Global Positioning System)衛星からの測位用信号を受信し、当該測位用信号に基づいて、自装置の位置や移動速度(即ち、航法装置1が設置されている船舶の位置や移動速度)を検出して表示部3に出力するように構成されている。
【0034】
具体的には、GPS受信機2は、GPSアンテナ4と、磁気方位センサ(方位検出部)5と、傾斜センサ(傾斜角検出部)6と、信号処理装置7と、を備えている。
【0035】
GPSアンテナ4は、GPS衛星からの測位用信号を受信するように構成され、例えばマストの頂上など、電波が遮られないような高い位置に設置される。GPS信号が受信した測位用信号は、信号処理装置7に出力される。
【0036】
磁気方位センサ5は、航法装置1が設置されている船舶の船首方向(船首が向いている方向)を、地球基準の絶対的な方位で検出するように構成されている。一般的に、船舶は、船首方向へ向かって前進する。従って、磁気方位センサ5は、船体の前進方向の方位を検出していると言うこともできる。なお船舶は、波や風等の外乱の影響により、船首方向からズレた方向に向けて進行する場合がある。本明細書において、「前進方向」と言った場合は、波や風等の外乱の影響を受けないと考えた場合に船体が進むべき方向(即ち船首方向)のことをいう。磁気方位センサ5による検出結果は、信号処理装置7に出力される。
【0037】
傾斜センサ6は、航法装置1が設置されている船舶の船体の傾斜角度を検出するように構成されている。なお、船体が傾くことによりGPSアンテナ4も同様に傾くことから、傾斜センサ6はGPSアンテナ4の傾きを検出していると言うこともできる。傾斜センサ6による検出結果は、信号処理装置7に出力される。
【0038】
信号処理装置7は、図略のCPU、ROM、RAM等のハードウェアと、前記ROMに記憶されたプログラム等のソフトウェアと、から構成されている。
【0039】
前記プログラムには、本実施形態に係るGNSS速度補正方法を信号処理装置7によって実現するための、GNSS速度補正プログラムが含まれている。
【0040】
前記GNSS速度補正方法は、GPS位置算出工程と、GPS速度算出工程(GNSS速度算出工程)と、方位取得工程と、傾斜角取得工程と、変換行列算出工程と、動揺速度除去工程と、を含んでいる。従って、前記GNSS速度補正プログラムは、前記各工程に対応して、GPS位置算出ステップと、GPS速度算出ステップ(GNSS速度算出ステップ)と、方位取得ステップと、傾斜角取得ステップと、変換行列算出ステップと、動揺速度除去ステップと、を含んでいる。
【0041】
そして、前記ハードウェアと前記ソフトウェアとが協働して動作することにより、信号処理装置7を、GPS位置・速度算出部(GNSS速度算出部)11、方位取得部12、傾斜角取得部13、変換行列算出部14及び動揺速度除去部15として機能させることができるようになっている。
【0042】
GPS位置・速度算出部11は、GPSアンテナ4が受信した測位用信号に基づいて、当該GPSアンテナ4の地球に対する絶対位置であるGPS位置と、当該GPSアンテナ4の地球に対する移動速度であるGPS速度(GNSS速度)と、を求めるように構成されている。なお、このGPS位置・速度算出部11の処理内容は、前記GNSS速度補正プログラムのGPS位置算出ステップ及びGPS速度算出ステップに対応している。
【0043】
本実施形態において、前記GPS速度は、北方向をX軸、東方向をY軸、地球中心方向をZ軸とする直交座標で定義された局地座標系(NED系)における速度ベクトルとして求められるものとする。なお、GPS衛星からの測位用信号に基づくGPS速度の算出方法としては、疑似距離の時間変化に基づいた方法と、搬送波のドップラ効果を利用する方法とが公知であるが、何れの方法を用いても良い。
【0044】
方位取得部12は、磁気方位センサ5からの出力信号に基づいて、船体のヘディング角ψ(船首方向の絶対方位)を取得するように構成されている。なお、方位取得部12の処理内容は、前記GNSS速度補正プログラムの方位取得ステップに対応している。
【0045】
傾斜角取得部13は、傾斜センサ6からの出力信号に基づいて、船体のピッチ角θ(ピッチ方向の傾斜角)及びロール角φ(ロール方向の傾斜角)を取得するように構成されている。なお、この傾斜角取得部13の処理内容は、前記GNSS速度補正プログラムの傾斜角取得ステップに対応している。
【0046】
ここで、ヘディング角ψ、ピッチ角θ及びロール角φの定義は以下のようなものである。即ち、図2のように、本実施形態の航法装置1が設置されている船舶の船首方向をx軸、舷側右方向をy軸、船体の下方向をz軸とする直交座標の船舶座標系(ボディ系)を定義する。そして、船体のx軸周りの傾斜角をロール角φ、y軸周りの傾斜角をピッチ角θとする。また、船首方向と北方向とのズレをヘディング角ψとする。
【0047】
変換行列算出部14は、前記方位取得部12が取得したヘディング角ψと、傾斜角取得部13が取得したピッチ角θ及びロール角φと、に基づいて、ボディ系からNED系への座標変換行列Cbnを求める。ヘディング角ψ、ピッチ角θ及びロール角φと、座標変換行列Cbnとの関係は、図3のとおりである。なお、この変換行列算出部14の処理内容は、前記GNSS速度補正プログラムの変換行列算出ステップに対応している。
【0048】
動揺速度除去部15は、ヘディング角ψ、ピッチ角θ及びロール角φに基づいて求められた前記座標変換行列Cbnに基づいて、GPSアンテナ4の動揺による誤差をGPS速度から除去し、補正済GPS速度を求めるように構成されている(具体的な処理内容は後述する)。なお、この動揺速度除去部15の処理内容は、前記GNSS速度補正プログラムの動揺速度除去ステップに対応している。
【0049】
GPS受信機2は、以上のようにして求めたGPS位置及び補正済GPS速度を、表示部3に出力する。
【0050】
表示部3は、具体的にはGPSプロッタとして構成されており、液晶ディスプレイを備えている。表示部3は、前記GPS位置に基づいて、地図上における自船の位置を液晶ディスプレイにグラフィカルに表示することができる。また表示部3は、この液晶ディスプレイに、GPS受信機2から入力された補正済GPS速度を表示することができるように構成されている。このように本実施形態では、GPSアンテナ4の動揺による誤差をGPS速度から除去して表示部3に表示することができる。従って、航法装置1のオペレータは、表示部3の表示内容を確認することにより正確な船速を把握することができる。
【0051】
次に、動揺速度除去部15における処理内容について具体的に説明する。
【0052】
前述のように、GPS位置・速度算出部11で算出されたGPS速度VGPSは、地球に対するGPSアンテナの移動速度であるため、当該GPSアンテナ4の動揺による誤差を含んでいる。即ち、GPS速度VGPSは、真の船速V(船の重心の地球に対する移動速度)と、船の重心に対するGPSアンテナ4の相対速度Vant(誤差)を合成したものであると言える。なお以下の説明では、船の重心に対するGPSアンテナ4の相対速度Vantを、アンテナ動揺速度と呼ぶ。
VGPS=V+Vant ・・・(1)
【0053】
従って、GPS速度VGPSから、アンテナ動揺速度Vantを誤差として除去することにより、真の船速Vを求めることができる。
V=VGPS−Vant ・・・(2)
【0054】
ここで、GPSアンテナ4は、船体の動揺によって、船首方向を正面側としたときの船体側方及び上下方向(船首方向と直交する方向)に移動することから、これをGPSアンテナ4の動揺による誤差(アンテナ動揺速度Vant)として算出している。
【0055】
つまり、船首方向と直交する平面内の速度成分(アンテナ動揺速度Vant)は、舷側方向(船首方向を正面側としたときの船体側方、即ちボディ系のy軸と平行な方向)のアンテナ移動速度VGPS_Edyと、上下方向(ボディ系のz軸と平行な方向)のアンテナ移動速度VGPS_Edzと、を合成することにより求めることができる。
Vant=VGPS_Edy+VGPS_Edz ・・・(3)
【0056】
舷側方向のアンテナ移動速度VGPS_Edyは、舷側方向(y軸方向)の単位ベクトルEdyに対するGPS速度VGPSの投影によって求めることができる。
VGPS_Edy=(Edy・VGPS)Edy ・・・(4)
なお、(Edy・VGPS)は内積である。
【0057】
上記の式(4)において、y軸方向の単位ベクトルEdyは、ボディ系で表現したy軸方向の単位ベクトル(0,1,0)をNED系に変換することで得ることができる。具体的には、Edyは、以下の式で求めることができる。
Edy=Cbn×(0,1,0)t ・・・(5)
【0058】
また、上下方向のアンテナ移動速度VGPS_Edzは、上下方向(z軸方向)の単位ベクトルEdzに対するGPS速度VGPSの投影によって求めることができる。
VGPS_Edz=(Edz・VGPS)Edz ・・・(6)
なお、(Edz・VGPS)は内積である。
【0059】
上記の式(6)において、z軸方向の単位ベクトルEdzは、ボディ系で表現したz軸方向の単位ベクトル(0,0,1)をNED系に変換することで得ることができる。具体的には、Edzは、以下の式で求めることができる。
Edz=Cbn×(0,0,1)t ・・・(7)
【0060】
従って、動揺速度除去部15における処理内容は、以下のとおりである。即ち、動揺速度除去部15は、まず、変換行列算出部14で求めた座標変換行列Cbnを式(5),(7)に代入することによって、単位ベクトルEdy,Edzを求める。続いて、動揺速度除去部15は、式(4)によって舷側方向のアンテナ移動速度VGPS_Edyを、式(6)によって上下方向のアンテナ移動速度VGPS_Edzを、それぞれ求める。そして、動揺速度除去部15は、式(3)によってアンテナ動揺速度Vant(GPSアンテナ4の動揺による速度誤差)を算出した後、式(2)によってGPS速度VGPSを補正することにより、真の船速(補正済GPS速度)Vを求める。
【0061】
以上のように、動揺速度除去部15は、船首方向の絶対方位(ヘディング角ψ)と、GPSアンテナ4の傾斜角(ピッチ角θ及びロール角φ)と、に基づいて求められた座標変換行列Cbnに基づいて、真の船速(補正済GPS速度)Vを算出するように構成されている。
【0062】
このように、本実施形態の航法装置1は、船体の船首方向の絶対方位と、GPSアンテナ4の傾斜角とを測定するだけで、GPS速度の補正を行うことができる。即ち、特許文献1とは異なり、船体の動揺周波数を推定する必要が無い。また、特許文献2とは異なり、GPS速度の補正を行うためにアンテナの高さに関する情報が必要無い。
【0063】
従って、本実施形態の航法装置1によれば、船の種類、積荷の状況や天候状況による動揺周波数の変化にかかわらず、常に適切にGPS速度の補正を行うことができる。また、正確な値を得ることが困難なアンテナ高さの情報を必要としないので、正確な補正結果を簡単に得ることができる。
【0064】
次に、本実施形態の航法装置1を用いて実際にGPS速度の補正を行った様子について説明する。
【0065】
本願発明者らは、本実施形態の航法装置1の効果を確認するため、実際の船舶に航法装置1を設置し、洋上停泊時においてGPS速度の補正を行った。このときに測定されたGPS速度(補正前の速度)、ピッチ角、ロール角、及び、航法装置1によって補正されたGPS速度(補正済GPS速度)を、図4のグラフに示す。
【0066】
図4の上側のグラフには、洋上停泊時に測定したGPS速度VGPS(補正前の速度)の時間変化が点線で示されている。また、同じく図4の上側のグラフには、前記GPS速度VGPSを本実施形態の航法装置1で補正することにより求めた、真の船速(補正済GPS速度)Vが実線で示されている。また、図4の下側のグラフには、このときのロール角の時間変化(実線)と、ピッチ角の時間変化(点線)と、がそれぞれ示されている。
【0067】
図4に示すGPS速度VGPSは停泊中に測定したものであるから、本来なら一定の値(速度ゼロ)を示すべきであるが、実際にはグラフに示すように大きく動揺している。これは、既に説明した通り、波などの影響により船体が動揺することで、GPSアンテナ4が動揺し、その結果アンテナ動揺速度Vantが誤差として含まれてしまうためである。
【0068】
一方、グラフに示すように、本実施形態の航法装置1が出力した補正済GPS速度Vは、GPS速度VGPS(補正前の速度)に比べて、正確な船速(速度ゼロ)に近いことが分かる。即ち、本実施形態の航法装置1によってGPS速度を補正することにより、アンテナの動揺による誤差を低減できることが確認された。
【0069】
なお、図4のグラフからわかるように、今回の実験で得られた補正済GPS速度Vは、GPS速度VGPS(補正前の速度)に比べて大幅に誤差を低減することができてはいるものの、正確な値(速度ゼロ)で一定の値とはなっておらず、ピッチ角の変動と同期して若干の変動がみられる。即ち、本実施形態の航法装置1では、ピッチ角の変動と同期したGPS速度の誤差を完全には除去することができない場合がある。しかしながら、例えば漁船が底曳き網漁を行っている場合は、低速航行時であっても船体で網を引っ張っているので、ピッチ方向の船体の動揺はかなり低減されると考えられる。従って、底曳き網漁船の場合は、本実施形態の航法装置1によって特に正確にGPS速度を補正することができる。
【0070】
また本願発明者らは、本実施形態の航法装置1によってGPS速度を補正することによる遅延の有無について検証するため、航法装置1を搭載した船舶の急発進及び急停止を行った。このときの様子を図5のグラフに示す。
【0071】
図5のグラフには、急発進及び急停止を行った時に測定したGPS速度VGPS(補正前の速度)の時間変化が点線で示されている。また、同じく図5のグラフには、前記GPS速度VGPSを本実施形態の航法装置1で補正することにより求めた、真の船速(補正済GPS速度)Vが実線で示されている。
【0072】
図5のグラフからわかるように、補正済GPS速度Vは、GPS速度VGPSの変化に対して殆ど遅れていない。この点、例えばローパスフィルタによってアンテナ動揺による速度誤差を除去しようとした場合、当該ローパスフィルタの出力は元のGPS速度VGPSに対して5秒程度遅れてしまう。以上のように、本実施形態の航法装置1は、ローパスフィルタ等の従来技術と比べて、殆ど遅延無くGPS速度の誤差を除去することができることが確認できた。
【0073】
以上で説明したように、本実施形態のGPS受信機2は、GPSアンテナ4と、GNSS位置・速度算出部11と、磁気方位センサ5と、傾斜センサ6と、動揺速度除去部15と、を備えている。GPSアンテナ4は、船舶に取り付けられ、GPS衛星からの測位用信号を受信する。GPS位置・速度算出部11は、測位用信号に基づいて、GPS速度を算出する。磁気方位センサ5は、船舶の船首方向の方位を検出する。傾斜センサ6は、GPSアンテナ4の傾斜角を検出する。動揺速度除去部15は、方位及び傾斜角に基づいて求めた座標変換行列Cbnに基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
【0074】
これにより、GPSアンテナ4の動揺によるGPS速度の誤差を除去し、船舶の正確な移動速度を得ることができる。また、ローパスフィルタ等を用いて誤差を除去する処理とは異なり、遅延は殆ど発生しない。更に、GPSアンテナ4の揺動による誤差を除去するためのパラメータ(方位及び傾斜角)は、磁気方位センサ5及び傾斜センサ6によって容易に得ることができる。従って、当該パラメータを推定する演算等を行う必要が無く、オペレータが当該パラメータを設定する必要も無い。
【0075】
また、本実施形態のGPS受信機2は、以下のように構成されている。即ち、動揺速度除去部15は、船舶の船首方向を正面側とした場合におけるGPS速度の側方成分と上下方向成分とを、方位及び傾斜角に基づいて求めた座標変換行列Cbnに基づいて算出する。そして、動揺速度除去部15は、GPS速度の側方成分と上下方向成分を、GPS速度から除去する。
【0076】
即ち、船舶の船首方向と直交する速度成分はGPSアンテナ4の揺動による誤差であるとみなすことができるので、当該誤差をGPS速度から除去することにより、船舶の正確な速度を求めることができる。
【0077】
また、本実施形態のGPS受信機2は、船舶に搭載されている。
【0078】
即ち、特に船舶においては、時化若しくは低速航行などにより船体が動揺するので、これによりGPSアンテナ4が動揺してGPS速度の誤差が発生し易い。従って、本実施形態のGPS受信機2によって、船舶に取り付けられたGPSアンテナ4の動揺に基づく速度の誤差を除去することが特に有効である。
【0079】
また、本実施形態の航法装置1は、GPS受信機2と、GPSアンテナ4の揺動による誤差が除去された前記GPS速度を表示する表示部3と、を備えている。
【0080】
このように、GPSアンテナ4の揺動による誤差が除去された補正済GPS速度(即ち、船舶の真の移動速度)を表示部3に表示することにより、船舶の操縦者は、表示部の表示を確認して船舶の移動状況を正確に把握することができる。これにより、船舶を正確に運航させることができる。
【0081】
また、本実施形態の信号処理装置7は、以下のように構成されている。即ち、この信号処理装置7は、GPSアンテナ4が受信したGPS衛星からの測位用信号に基づいて算出されたGPS速度から、GPSアンテナ4の動揺による誤差を除去する動揺速度除去部15を備える。動揺速度除去部15は、GPSアンテナ4が取り付けられた船舶の船首方向の方位と、GPSアンテナ4の傾斜角と、に基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
【0082】
また、本実施形態のGNSS速度補正プログラムは、GPS速度算出ステップと、方位取得ステップと、傾斜角取得ステップと、動揺速度除去ステップと、を含む処理を信号処理装置に実行させるプログラムである。GPS速度算出ステップでは、GPSアンテナ4が受信したGPS衛星からの測位用信号に基づいてGPS速度を算出する。方位取得ステップでは、前記GPSアンテナが取り付けられた船舶の船首方向の方位を取得する。傾斜角取得ステップでは、GPSアンテナ4の傾斜角を取得する。動揺速度除去ステップでは、方位及び傾斜角に基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
【0083】
また、本実施形態のGNSS速度補正方法は、GPS速度補正工程と、方位取得工程と、傾斜角取得工程と、動揺速度除去工程と、を含んでいる。GPS速度算出工程では、GPSアンテナ4が受信したGPS衛星からの測位用信号に基づいてGPS速度を算出する。方位取得工程では、GPSアンテナ4が取り付けられた船舶の船首方向の方位を取得する。傾斜角取得工程では、GPSアンテナの傾斜角を取得する。動揺速度除去工程では、方位及び傾斜角に基づいて、GPSアンテナ4の動揺による誤差を算出して前記GPS速度から除去する。
【0084】
次に、上記実施形態の変形例について説明する。
【0085】
本変形例は、上記実施例の式(3)に代えて、以下の式(3)’によってアンテナ動揺速度Vantを求めるものである。
Vant=VGPS_Edy ・・・(3)’
【0086】
即ち、船舶のように水平面上を移動する移動体においては、上下方向のアンテナ移動速度VGPS_Edzはそれほど大きくならないため、無視することができる場合である。この場合、式(3)’のように、舷側方向のアンテナ移動速度VGPS_Edyをアンテナ動揺速度Vantとすれば良い。
【0087】
このように、上下方向のアンテナ移動速度VGPS_Edzを無視することにより、上記実施形態の式(6),(7)の演算を省略することができるので、演算負荷を低減することができる。なお、本願発明者らが本変形例の航法装置を船舶に設置し、実際にGPS速度を補正する実験を行った結果、上下方向のアンテナ移動速度VGPS_Edzを考慮した場合と殆ど変わらない結果が得られることが確認できている。
【0088】
以上で説明したように、本変形例のGPS受信機は、以下のように構成されている。即ち、動揺速度除去部15は、船舶の船首方向を正面側とした場合におけるGPS速度の側方成分を、方位及び傾斜角に基づいて求めた座標変換行列Cbnに基づいて算出する。そして、動揺速度除去部15は、GPS速度の側方成分を、GPS速度から除去する。
【0089】
例えば船舶等の水平面内で移動する移動体の場合、GPSアンテナ4の位置が上下に素早く動揺することは少ないと考えられるので、GPSアンテナが上下に動揺することによる誤差は無視できる場合がある。このような場合は上記のように、アンテナの動揺による誤差としてGNSS速度の側方成分のみを考えても、十分な精度で正確な速度を得ることができる。
【0090】
以上に本発明の好適な実施の形態(及び変形例)を説明したが、上記の構成は例えば以下のように変更することができる。
【0091】
上記実施形態では、GNSSの一例としてGPSを用いた実施例を説明したが、他のGNSSを用いる構成であっても良いことは勿論である。
【0092】
上記実施形態では、磁気方位センサを方位検出部、傾斜センサを傾斜角検出部としたが、これに限らず、船首方位と傾斜角を検出できる構成であれば他の形式のセンサを方位検出部及び傾斜角検出部として採用することができる。例えば、磁気方位センサ及び傾斜センサに代え、あるいはこれらに加えて、角速度センサや加速度センサなどを組み合わせて船首方位と傾斜角を検出するように構成することができる。
【0093】
上記実施形態では、GPS受信機が備えたセンサが方位及び傾斜角を検出する構成としたが、この構成に限らず、GPS受信機の外部の機器(例えば慣性航法装置)が方位及び傾斜角を検出する構成でも良い。この場合、前記慣性航法装置が検出した方位及び傾斜角を示すデータが、信号処理装置に入力される。
【0094】
上記計算式は一例であって、この計算式に限定されるものではない。例えば、上記実施形態では、ボディ系とNED系を用いて速度ベクトルの演算を行っているが、速度ベクトルの演算は任意の座標系に変換して行うことができるのは勿論である。
【0095】
上記実施形態では、信号処理装置7が備える各構成(GPS速度算出部、方位取得部12、傾斜角取得部13、変換行列算出部、動揺速度除去部15等)を、ソフトウェアとハードウェアとの協働により実現している。この構成に代え、信号処理装置7が備える各構成の全部又は一部を、専用のハードウェアで実現しても良い。
【0096】
本発明の航法装置は、船舶に限らず、飛行機、自動車等の任意の移動体に搭載することができる。例えば、飛行機の場合においては、機首が向いている方向が前進方向であり、自動車の場合は、車体正面が向いている方向が前進方向であると言える。ただし、船舶の場合は、GPSアンテナがマスト頂上等の高い位置に設置される傾向があり、しかも波等によって船体が動揺するため、アンテナの動揺による誤差が発生し易いという事情がある。従って、本発明の航法装置を船舶に搭載することにより、特に大きな効果を発揮することができる。
【符号の説明】
【0097】
1 航法装置
2 GPS受信機(GNSS受信機)
3 表示部
4 GPSアンテナ(アンテナ)
5 磁気方位センサ(方位検出部)
6 傾斜センサ(傾斜角取得部)
7 信号処理装置
11 GPS位置・速度算出部
15 動揺速度除去部
【特許請求の範囲】
【請求項1】
移動体に取り付けられ、GNSS衛星からの測位用信号を受信するアンテナと、
前記測位用信号に基づいて、GNSS速度を算出するGNSS速度算出部と、
前記移動体の前進方向の方位を検出する方位検出部と、
前記アンテナの傾斜角を検出する傾斜角検出部と、
前記方位及び前記傾斜角に基づいて前記アンテナの動揺による誤差を算出して前記GNSS速度から除去する動揺速度除去部と、
を備えることを特徴とするGNSS受信機。
【請求項2】
請求項1に記載のGNSS受信機であって、
前記動揺速度除去部は、前記移動体の前進方向を正面側とした場合における前記GNSS速度の側方成分と上下方向成分とを、前記方位及び前記傾斜角に基づいて算出して前記GNSS速度から除去することを特徴とするGNSS受信機。
【請求項3】
請求項1に記載のGNSS受信機であって、
前記動揺速度除去部は、前記移動体の前進方向を正面側とした場合における前記GNSS速度の側方成分を、前記方位及び前記傾斜角に基づいて算出して前記GNSS速度から除去することを特徴とするGNSS受信機。
【請求項4】
請求項1から3までの何れか一項に記載のGNSS受信機であって、
前記移動体は、船舶であることを特徴とするGNSS受信機。
【請求項5】
請求項1から4までの何れか一項に記載のGNSS受信機と、
前記アンテナの揺動による誤差が除去された前記GNSS速度を表示する表示部と、
を備えることを特徴とする航法装置。
【請求項6】
アンテナが受信したGNSS衛星からの測位用信号に基づいて算出されたGNSS速度から、前記アンテナの動揺による誤差を除去する動揺速度除去部を備えた信号処理装置であって、
前記動揺速度除去部は、前記アンテナが取り付けられた移動体の前進方向の方位と、前記アンテナの傾斜角と、に基づいて、前記アンテナの動揺による誤差を算出して前記GNSS速度から除去することを特徴とする信号処理装置。
【請求項7】
アンテナが受信したGNSS衛星からの測位用信号に基づいてGNSS速度を算出するGNSS速度算出ステップと、
前記アンテナが取り付けられた移動体の前進方向の方位を取得する方位取得ステップと、
前記アンテナの傾斜角を取得する傾斜角取得ステップと、
前記方位及び前記傾斜角に基づいて、前記アンテナの動揺による誤差を算出して前記GNSS速度から除去する動揺速度除去ステップと、
を含む処理を信号処理装置に実行させることを特徴とするGNSS速度補正プログラム。
【請求項8】
アンテナが受信したGNSS衛星からの測位用信号に基づいてGNSS速度を算出するGNSS速度算出工程と、
前記アンテナが取り付けられた移動体の前進方向の方位を取得する方位取得工程と、
前記アンテナの傾斜角を取得する傾斜角取得工程と、
前記方位及び前記傾斜角に基づいて、前記アンテナの動揺による誤差を算出して前記GNSS速度から除去する動揺速度除去工程と、
を含むことを特徴とするGNSS速度補正方法。
【請求項1】
移動体に取り付けられ、GNSS衛星からの測位用信号を受信するアンテナと、
前記測位用信号に基づいて、GNSS速度を算出するGNSS速度算出部と、
前記移動体の前進方向の方位を検出する方位検出部と、
前記アンテナの傾斜角を検出する傾斜角検出部と、
前記方位及び前記傾斜角に基づいて前記アンテナの動揺による誤差を算出して前記GNSS速度から除去する動揺速度除去部と、
を備えることを特徴とするGNSS受信機。
【請求項2】
請求項1に記載のGNSS受信機であって、
前記動揺速度除去部は、前記移動体の前進方向を正面側とした場合における前記GNSS速度の側方成分と上下方向成分とを、前記方位及び前記傾斜角に基づいて算出して前記GNSS速度から除去することを特徴とするGNSS受信機。
【請求項3】
請求項1に記載のGNSS受信機であって、
前記動揺速度除去部は、前記移動体の前進方向を正面側とした場合における前記GNSS速度の側方成分を、前記方位及び前記傾斜角に基づいて算出して前記GNSS速度から除去することを特徴とするGNSS受信機。
【請求項4】
請求項1から3までの何れか一項に記載のGNSS受信機であって、
前記移動体は、船舶であることを特徴とするGNSS受信機。
【請求項5】
請求項1から4までの何れか一項に記載のGNSS受信機と、
前記アンテナの揺動による誤差が除去された前記GNSS速度を表示する表示部と、
を備えることを特徴とする航法装置。
【請求項6】
アンテナが受信したGNSS衛星からの測位用信号に基づいて算出されたGNSS速度から、前記アンテナの動揺による誤差を除去する動揺速度除去部を備えた信号処理装置であって、
前記動揺速度除去部は、前記アンテナが取り付けられた移動体の前進方向の方位と、前記アンテナの傾斜角と、に基づいて、前記アンテナの動揺による誤差を算出して前記GNSS速度から除去することを特徴とする信号処理装置。
【請求項7】
アンテナが受信したGNSS衛星からの測位用信号に基づいてGNSS速度を算出するGNSS速度算出ステップと、
前記アンテナが取り付けられた移動体の前進方向の方位を取得する方位取得ステップと、
前記アンテナの傾斜角を取得する傾斜角取得ステップと、
前記方位及び前記傾斜角に基づいて、前記アンテナの動揺による誤差を算出して前記GNSS速度から除去する動揺速度除去ステップと、
を含む処理を信号処理装置に実行させることを特徴とするGNSS速度補正プログラム。
【請求項8】
アンテナが受信したGNSS衛星からの測位用信号に基づいてGNSS速度を算出するGNSS速度算出工程と、
前記アンテナが取り付けられた移動体の前進方向の方位を取得する方位取得工程と、
前記アンテナの傾斜角を取得する傾斜角取得工程と、
前記方位及び前記傾斜角に基づいて、前記アンテナの動揺による誤差を算出して前記GNSS速度から除去する動揺速度除去工程と、
を含むことを特徴とするGNSS速度補正方法。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−215113(P2011−215113A)
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願番号】特願2010−86116(P2010−86116)
【出願日】平成22年4月2日(2010.4.2)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願日】平成22年4月2日(2010.4.2)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
[ Back to top ]