
GPS信号とGLONASS信号とを同時に受信するシステムのためのアナログフロントエンド
GPS信号とGLONASS信号の両方を受信するための受信機が提供される。この受信機は、アナログフロントエンド(AFE)と、AFEの出力を受信するためのGPSデジタルフロントエンド(DFE)およびGLONASS DFEと、GPS DFEおよびGLONASS DFEの出力を受信するためのデュアルモードインターフェース(DMI)とを含む。DMIの出力を受信するための検索エンジンが提供される。特に、AFEのいくつかのフロントエンド構成要素が、GPS信号とGLONASS信号の両方を処理するように構成される。

【発明の詳細な説明】
【技術分野】
【0001】
[関連出願]
本出願は、2010年1月25日に出願された「System And Method For Simultaneously Receiving GPS And GLONASS Signals」と題する米国仮特許出願第61/298,187号の優先権を主張する。
【背景技術】
【0002】
[発明の分野]
本発明は、位置判断を可能にする衛星システムに関し、特に、GPSおよびGLONASS衛星システムの衛星がリアルタイム位置判断を同時に行うことを可能にするシステムおよび方法に関する。
【0003】
[関連技術]
GPS(全地球測位システム:global positioning system)は、米国によって開発され、運営されている無線ベースの衛星システムである。GPSは1995年に完全に動作可能になった。グローバルカバレージを与えるために、GPSは24個から32個の衛星を使用する。最小24個の衛星を仮定すると、6つの軌道の各々に4つの衛星が配置される。6つの軌道平面の昇交点(ascending node)は60度ずつ分離される。この構成では、任意の所与のポイントからいつでも最低6つの衛星が見えるべきである。
【0004】
すべてのGPS衛星は1575MHzで送信し、各信号は、衛星ごとに一意である1023個の「チップ」の高レート擬似ランダム(PRN)系列で符号化されるので、受信機は、異なる衛星からの信号を区別することができる。粗捕捉(CA:coarse acquisition)コードとも呼ばれるこれらのチップは、受信機の検索エンジンが位置判断のために利用可能な衛星を識別することを可能にするために、連続的に反復される。たとえば、GPSは1023チップ/msのチッピングレートを有する。また、見える衛星を判断するために、反復CAコード内の位置を指すCA位相が使用され得る。受信機における誤差補正に応じて、GPSは、1cmから15mの測位精度を与えることができる。
【0005】
GLONASS(全地球航法衛星システム;global navigation satellite system)は、旧ソビエト連邦によって開発され、現在ロシアによって運営されている無線ベースの衛星システムである。2009年現在、GLONASSはグローバルカバレージを有する。このグローバルカバレージを与えるために、GLONASSは24個の衛星を含み、21個の衛星は信号を送信するために使用され得、3つの衛星はスペアとして使用され得る。24個の衛星は3つの軌道に配置され、各軌道は8つの衛星を有する。3つの軌道平面の昇交点は120度ずつ分離される。この構成では、任意の所与のポイントからいつでも最低5つの衛星が見えるべきである。
【0006】
すべてのGLONASS衛星は同じ標準精度(SP:standard precision)信号を送信するが、各衛星は異なる周波数で送信する。詳細には、GLONASSは、1602.0MHzを中心とする15チャネルFDMA(周波数分割多元接続)を使用する。したがって、各衛星は1602MHz+(N×0.5625MHz)で送信し、Nは周波数チャネル番号(N=−7,−6,−5,...5,6)である。GLONASSは511チップ/msのチッピングレートを有する。GLONASSは、5〜10メートル以内の水平方向測位精度と、15メートル以内の垂直方向測位精度とを与えることができる。
【0007】
現在、位置情報を与えるために利用可能であるGLONASS衛星の出現とともに、位置判断のためにGPS信号とGLONASS信号の両方を使用する能力を含むシステムを有することが望ましい。現在のシステムは、信号タイプごとに別個の受信経路を含む。たとえば、2006年10月30日にGradincicらによって出願された(2007年5月3日に公開された)米国公開第2007/0096980号には、複数の独立した信号経路を含み、各信号経路が別個のIFおよびベースバンドダウンコンバータを含む、RF受信機が記載されている。各信号経路は、外部IFフィルタの選択によって特定のIF帯域に同調される。
【0008】
したがって、構成要素を最小限に抑えながら、GPS信号とGLONASS信号の両方のセットが位置判断において使用されることを可能にし、それによって位置精度を改善する、両方の信号を受信するためのシステムおよび方法が必要である。
【発明の概要】
【0009】
GPS信号とGLONASS信号の両方を受信するための受信機が提供される。この受信機は、アナログフロントエンド(AFE;analog front end)と、AFEの出力を受信するためのGPSデジタルフロントエンド(DFE;digital front end)およびGLONASS DFEと、GPS DFEおよびGLONASS DFEの出力を受信するためのデュアルモードインターフェース(DMI;dual mode interface)とを含む。検索エンジンと追跡エンジンとが提供され、各々がDMIの出力を受信する。特に、AFEのいくつかのフロントエンド構成要素が、GPS信号とGLONASS信号の両方を処理するように構成される。
【0010】
GPS信号とGLONASS信号の両方を処理するように構成された例示的なフロントエンド構成要素は、低雑音増幅器(LNA;low noise amplifier)と単一のミキサセット(すなわち単一のI/Qミキサペア)とを含むことができる。好ましい一実施形態では、フロントエンド構成要素は単一の局部発振器(LO;local oscillator)を含むことができる。このLOは静的にまたは動的に調整され得る。
【0011】
AFEは、GPSポリフェーズ(polyphase)フィルタとGLONASSポリフェーズフィルタとを含むことができる。一実施形態では、GPSポリフェーズフィルタおよび/またはGLONASSポリフェーズフィルタのためのLO周波数およびフィルタ中心周波数は(静的にまたは動的に)調整可能であり得る。この構成では、LOは、整数N合成器(integer-N synthesizer)または小数N合成器(fractional-N synthesizer)を用いて実装され得る。別の実施形態では、GPSポリフェーズフィルタおよびGLONASSポリフェーズフィルタの通過帯域は、正の周波数および負の周波数のいずれかであるように(静的にまたは動的に)選択可能であり得る。さらに別の実施形態では、GPSポリフェーズフィルタおよびGLONASSポリフェーズフィルタの各々のためのフィルタ帯域幅は(静的にまたは動的に)調整可能であり得る。一実施形態では、これらのフィルタのポリフェーズ機能を切り替え、それによってポリフェーズフィルタを標準的な中間周波数(IF)フィルタに変換することができる。
【0012】
一実施形態では、LOの周波数はGPS周波数とGLONASS周波数との間に設定され得る。たとえば、好ましい実施形態では、LOの周波数は、GPS IFがGLONASS IFを下回るように設定され得る。一実施形態では、LO周波数は、GPS信号を最適化するために使用され得る。詳細には、LOの周波数がほぼ1581.67MHzであるとき、GPS信号の得られたIF周波数はほぼ6MHzである。ダウンコンバートされたGPS信号は、このIFの周りの有限帯域幅、たとえば4〜8MHzを占有する。概して、ダウンコンバートされた信号スペクトルが1〜6MHzの間の帯域に入る場合、IFはDCオフセットと1/f雑音とを回避するためには十分高いが、フィルタ性能を最大にするためには十分低い。したがって、この構成では、GPSフィルタの最適化は、事実上、GLONASSフィルタに勝る優先度を与えられる。
【0013】
GPS DFEは、低域フィルタ(LPF)とマルチプレクサとを含むことができる。LPFは、AFEの出力信号をフィルタ処理し、デシメートすることができる。マルチプレクサは、AFEの出力信号またはLPFの出力信号のいずれかを選択することができる。一実施形態では、AFEの出力信号が64MHzであるとき、マルチプレクサはLPFの出力を選択することができ、LPFは、32MHz信号を生成する2:1デシメータを含む。GPS DFEはまた、マルチプレクサの出力信号から干渉をフィルタ除去するための帯域通過フィルタを含むことができる。
【0014】
GPS DFEは、マルチプレクサの出力信号から既知のスパー周波数(spur frequency)を消去するための少なくとも1つのスパー推定消去(SEC;spur estimation cancellation)ブロックをさらに含むことができる。各SECブロックは、サンプルに基づいてスパーの位相を生成するための数値制御発振器(NCO)を含むことができ、サンプルはスパー周波数/アナログデジタル変換器(ADC)周波数である。sin/cosテーブルは、NCOによって与えられた位相に基づいて4象限フェーザ(four quadrant phasor)を生成することができる。共役乗算器(conjugate multiplier)は、AFEの4象限フェーザと出力信号の共役とを乗算することができる。合計ブロックは、大きいブロックサイズにわたって共役乗算器の結果を平均化することができる。複素複素乗算器(complex-by-complex multiplier)は、合計ブロックからのダンプ値と4象限フェーザとを乗算することができる。加算器は、SECブロック出力を生成するためにAFEの出力信号と複素複素乗算器の実数結果とを加算することができる。
【0015】
GPS DFEは、サンプルカウントによって正規化されたアキュムレータ機能を実行するためのDC推定および消去ブロックをさらに含むことができる。DECの出力信号は、量子化誤差を低減するために有利には小数ビットを含むことができる。
【0016】
GPS DFEは、中間周波数(IF)信号をベースバンド信号に変換するためのデジタルミキサをさらに含むことができる。デジタルミキサは、有利には、変換後に、最大ドップラー周波数よりも大きい残留周波数オフセットを与えることができる。一実施形態では、デジタルミキサは、1経路入力2経路(I/Q)出力構成を有する。
【0017】
GPS DFEは、デジタルミキサの出力信号を受信する積分およびダンプデシメーション(dump decimation)(ID2)ブロックをさらに含むことができる。一実施形態では、ID2ブロックは、16MHz信号を生成する2:1デシメータを含む。
【0018】
GPS DFEは、ID2ブロックの出力信号を符号ビットと大きさビットとに変換する量子化器ブロックをさらに含むことができる。量子化器は、符号ビットと大きさビットとを、レガシーデバイスに適合する2ビットフォーマットで組み合わせることができる。特に、大きさビットは、GPS DFEの出力における最大電力に対する所望の信号電力と、量子化器の入力における最大電力に対する所望の信号電力とを含むパラメータに基づくしきい値と比較され得る。
【0019】
GLONASS DFEは、既知のスパー周波数を消去するための少なくとも1つのスパー推定消去(SEC)ブロックと、デジタルミキサと、LPFと、量子化器とを含むことができる。一実施形態では、SECブロックと、デジタルミキサと、LPFとは、GPS SECブロックのために与えられるものと実質的に同じであり得る。量子化器ブロックも、しきい値がGLONASS DFEの出力における最大電力に対する所望の信号電力と量子化器の入力における最大電力に対する所望の信号電力とを含むパラメータに基づき得ることを除いて、GPS DFEのための量子化器ブロックと実質的に同じである。
【0020】
この受信機は、有利には、自動利得制御(AGC)ブロックの少なくとも一部分が、GPS信号とGLONASS信号の両方に適用される利得の共通制御を行う、AGCブロックを含むことができる。一実施形態では、利得は低雑音増幅器(LNA)に関連する。AGCを提供することは、GPS信号経路において利得を最適化することと、次いで、GLONASS信号経路において利得を調整することとを含むことができる。詳細には、AFEの場合、AGCを提供することは、GPS固有増幅器と、GLONASS固有増幅器と、共有GPS/GLONASS増幅器とを初期化することを含むことができる。次いで、GPS固有増幅器および共有GPS/GLONASS増幅器の利得が、GPS DFEの出力を使用して補正され得る。GPS AGCロックの後、GLONASS固有増幅器の利得は、GLONASS DFEの出力を使用して補正され得る。一実施形態では、GPS固有増幅器および共有GPS/GLONASS増幅器の利得を補正すること、ならびにGLONASS固有増幅器の利得を補正することは、インターフェースカウンタデバイス(ICD)によって実行され得る。特に、GPS DFEおよびGLONASS DFEの出力は、大きさビットのみがカウントされる量子化出力であり得る。一実施形態では、ICDは、受信機における他の量子化出力を測定することによってデバッグされ得る。
【0021】
この受信機を動作させる方法が、同じ検索エンジンを使用してGPS信号とGLONASS信号とを処理することを含むことができる。特に、検索エンジンは、コヒーレント積分と非コヒーレント積分の両方を実行し、得られた最大出力値を捕捉判断のためのソフトウェアに送ることができる。
【0022】
この受信機は、デュアルモードインターフェースからGPS固有信号を受信するように構成されたGPS事前相関(pre-correlation)雑音推定器と、デュアルモードインターフェースからGLONASS固有信号を受信するように構成されたGLONASS事前相関雑音推定器とをさらに含むことができる。GPS事前相関雑音推定器およびGLONASS推定器は、トレーニングエンジンとは別個であり得ることに留意されたい。GPS事前相関雑音推定器およびGLONASS事前相関雑音推定器の各々は、入来信号のI成分とQ成分の両方の帯域外雑音を削除するための第1の積分およびダンプブロックを含むことができる。絶対値ブロックは、第1の積分およびダンプブロックからの出力の絶対値を与えることができる。加算器は、絶対値ブロックの出力を加算することができる。第2の積分およびダンプブロックは、加算器の出力を処理し、雑音推定値出力を生成することができる。GPS事前相関雑音推定器およびGLONASS事前相関雑音推定器の各々は、各ダンプをカウントするカウンタをさらに含むことができる。GPS事前相関雑音推定器の絶対値ブロックおよび加算器のためのビット幅がGLONASS事前相関雑音推定器の絶対値ブロックおよび加算器のためのビット幅とは異なり得ることに留意されたい。
【0023】
この受信機のためのタップ生成器は、シフトレジスタと、5つのマルチプレクサと、制御回路とを含むことができる。シフトレジスタは、新しいチップが生成されるとシフトするように構成され得る。シフトレジスタの各レジスタは、異なるチップを記憶することができ、中間レジスタはプロンプトコードを与えることができる。シフトレジスタによって記憶されたチップのうちの1つを選択するように構成され得る各マルチプレクサは、雑音(N)コードと、非常に早い(VE)コードと、早い(E)コード、遅い(L)コード、または非常に遅い(VL)コードを出力することができる。制御回路は5つのマルチプレクサを制御することができる。一実施形態では、制御回路は5つの加算器と5つのフロアブロックとを含むことができる。各加算器は、タップN、タップVE、タップE、タップL、またはタップVLのための相対タップ間隔(RTS)と、切捨てコード位相とを加算することができる。各フロアブロックは、5つの加算器によって生成された5つの和のうちの1つを切り捨て、5つのマルチプレクサのうちの1つのための制御信号を生成するように構成され得る。
【0024】
この受信機は、GPS信号とGLONASS信号とのレイテンシが同等になるように受信機におけるフィルタの遅延が補正されるように較正され得る。一実施形態では、補正は、AFEに対して、たとえば表面弾性波(SAW)フィルタにおいて行われ得る。一実施形態では、いつ較正が必要とされるかを判断し、および/または補正量を調整するために、温度センサが使用され得る。フィルタは中間周波数(IF)フィルタを含むことができる。一実施形態では、補正されるべき遅延の差を計算するために、較正信号が使用され得る。補正は、DFEにおいて、たとえばベースバンドフィルタにおいて行われ得る。一実施形態では、補正は、ライブGPS信号を使用して行われ得る。
【0025】
一実施形態では、IFフィルタを較正することは、受信機の先行する構成要素からIFフィルタを切断することを含むことができる。この時点で、IFフィルタへの入力のための複素トーンが生成され得る。複素トーンはIFフィルタによってフィルタ処理され得る。得られたフィルタ処理された信号は、アナログデジタル変換(ADC)を含む、IFフィルタに続く構成要素を通して伝搬され得る。ADCの出力と複素トーンとは相関され得る。次いで、相関に基づいて遅延較正値が生成され得る。この遅延較正値は、IFフィルタを較正するために使用され得る。
【0026】
一実施形態では、受信機のデジタル処理チェーンを較正することは、デジタル処理チェーンの複数のデジタル構成要素のためのルックアップテーブル(LUT)を構築することを含むことができる。LUTは、アナログデジタルクロックサイクルによって測定された各デジタル構成要素のレイテンシを含むことができる。
【0027】
一実施形態では、受信機への入力において強い干渉が検出されると、信号がブランキングされ得る。ブランキングは、受信機中の低雑音増幅器(LNA)のピーク検出器、受信機と共存しているブルートゥースシステムの送信インジケータ、WiFiシステムの送信インジケータ、および/またはセルフォンの送信インジケータによって制御され得る。一実施形態では、ピーク検出器と送信インジケータのうちの少なくとも1つとは、イネーブル/ディセーブル機能を有することができる。ブランキングは、AGCと、追跡チャネルと、検索エンジンとのうちの少なくとも1つに適用され得る。
【0028】
一実施形態では、GPS専用モードと、GPSおよびGLONASS固定モードと、GPSおよびGLONASS動的モードとのうちの1つから動作モードが選択され得る。GPSおよびGLONASS固定モードはGPSおよびGLONASSを常時オンにし、GPSおよびGLONASS動的モードは、GPSとGLONASSとのうちの1つを常時オンにし、他のシステムを所定の条件に基づいてオンにする。
【0029】
一実施形態では、受信機のための非活動化回路が提供され得る。(1)第1のシステム(すなわちGPSまたはGLONASS)からの対応する信号が必要とされないとき、または(2)第2のシステムからの信号のみが正確な位置判断を与えるとき、この非活動化回路は第1のシステムの専用回路を非活動化することができる。この非活動化回路はナビゲーションエンジンによって制御され得る。
【図面の簡単な説明】
【0030】
【図1】GPSとGLONASSの両方のための信号を受信し、復号するための例示的な受信機を示す図。
【図2A】図1の受信機のための例示的なアナログフロントエンドを示す図。
【図2B】図1の受信機のための別の例示的なアナログフロントエンドを示す図。
【図3A】所与のGPS周波数およびGLONASS周波数に対する局部発振器(LO)周波数の様々な位置と、混合後のそれらのLO周波数の影響とを示す図。
【図3B】所与のGPS周波数およびGLONASS周波数に対する局部発振器(LO)周波数の様々な位置と、混合後のそれらのLO周波数の影響とを示す図。
【図3C】所与のGPS周波数およびGLONASS周波数に対する局部発振器(LO)周波数の様々な位置と、混合後のそれらのLO周波数の影響とを示す図。
【図3D】所与のGPS周波数およびGLONASS周波数に対する局部発振器(LO)周波数の様々な位置と、混合後のそれらのLO周波数の影響とを示す図。
【図3E】所与のGPS周波数およびGLONASS周波数に対する局部発振器(LO)周波数の様々な位置と、混合後のそれらのLO周波数の影響とを示す図。
【図3F】所与のGPS周波数およびGLONASS周波数に対する局部発振器(LO)周波数の様々な位置と、混合後のそれらのLO周波数の影響とを示す図。
【図4】GPSのための例示的なデジタルフロントエンド(DFE)を示す図。
【図5】GPS DFEのための例示的な低域フィルタ(LPF)を示す図。
【図6】GPS DFEのための例示的な帯域フィルタ(BPF)を示す図。
【図7】GPS DFEのための例示的なスパー推定および消去(SEC)ブロックを示す図。
【図8】GPS DFEのための別の例示的なSECブロックを示す図。
【図9】GPS DFEのための例示的なDC推定および消去(DEC)ブロックを示す図。
【図10】GPS DFEのための例示的なデジタルミキサ(DM)を示す図。
【図11】GPS DFEのための例示的な積分およびダンプ(I&D)セット(ID2)を示す図。
【図12】GPS DFEのための例示的な2ビット量子化器を示す図。
【図13A】64MHzのADC周波数および6MHzのIF周波数についての例示的なシミュレーション結果を示す図。
【図13B】64MHzのADC周波数および6MHzのIF周波数についての例示的なシミュレーション結果を示す図。
【図13C】64MHzのADC周波数および6MHzのIF周波数についての例示的なシミュレーション結果を示す図。
【図13D】64MHzのADC周波数および6MHzのIF周波数についての例示的なシミュレーション結果を示す図。
【図13E】64MHzのADC周波数および6MHzのIF周波数についての例示的なシミュレーション結果を示す図。
【図13F】64MHzのADC周波数および6MHzのIF周波数についての例示的なシミュレーション結果を示す図。
【図14A】異なる信号電力についてのSE検出確率(Pd(%))対スパー電力レベルを示すプロット。
【図14B】4つの異なる信号電力レベルについてのSE検出確率(Pd(%))対スパー周波数を示すプロット。
【図14C】異なるスパーについてのSE検出確率(Pd(%))対信号電力(信号インジケータ)(dBm)を示すプロット。
【図14D】SE検出確率(PD(%))対スパー周波数誤差(Hz)を示すプロット。
【図15】例示的なGLONASS DFEを示す図。
【図16】GLONASS DFEのための例示的なSECブロックを示す図。
【図17】GLONASS DFEのための例示的なDMを示す図。
【図18】GLONASS DFEのための例示的なLPFを示す図。
【図19】図1に示す受信機の構成要素を制御することができる非活動化回路を示す図。
【図20】複数のチップを含むロケーション判断システムを示す図。
【図21】GPS DFE動作およびGLO DFE動作の例示的なタイミング図。
【図22】例示的なGPS AGC動作を示す図。
【図23】例示的なGLONASS AGC動作を示す図。
【図24】例示的なデュアルモードインターフェース(DMI)を示す図。
【図25】DMIのための例示的なチャネル選択ミキサを示す図。
【図26】例示的な検索エンジンを示す図。
【図27】例示的なGPSコード生成器を示す図。
【図28】例示的なGLONASSコード生成器を示す図。
【図29】例示的なGLONASSデータ系列生成を示す図。
【図30】例示的なコードトラッキングループを示す図。
【図31】コードトラッキングループと追跡エンジンとの間の例示的なインターフェースを示す図。
【図32】例示的な追跡エンジンを示す図。
【図33】事前相関雑音推定器のための例示的な位置を示す図。
【図34】例示的なGPS事前相関雑音推定器を示す図。
【図35】例示的なGLONASS事前相関雑音推定器を示す図。
【図36】事前相関雑音推定器(すなわち、GPS事前相関雑音推定器またはGLONASS事前相関雑音推定器)についての推定雑音電力対時間の例示的なシミュレーショングラフを示す図。
【図37】従来の雑音タップ推定器についての推定雑音電力対時間の例示的なシミュレーショングラフを示す図。
【図38】高度ダブルデルタコード弁別器をサポートする例示的な6タップ生成器を示す図。
【図39】図38に示す6タップ生成器のための例示的なコード数値制御発振器(NCO)を示す図。
【図40】ポリフェーズフィルタにおける異なるレイテンシを補償するための、図2Aに示すAFEの例示的な較正構成を示す図。
【図41】図40に示す較正構成のための例示的な相関器を示す図。
【図42】レイテンシに寄与し得る、デュアルモードインターフェースのGPS DFEおよびGPS使用構成要素のうちの例示的な構成要素を示す図。
【図43】レイテンシに寄与し得る、デュアルモードインターフェースのGLONASS DFEおよびGLONASS使用構成要素のうちの例示的な構成要素を示す図。
【図44】ブランクイネーブル信号を生成するために複数の制御信号を組み合わせるための例示的な回路を示す図。
【図45】Bluetooth(登録商標)において使用される例示的なHV3送信を示す図。
【図46】ブランクイネーブル信号を受信し、ICDイネーブル信号を生成するための例示的な回路を示す図。
【発明を実施するための形態】
【0031】
GPS信号とGLONASS信号の両方を受信することが可能な受信機について説明する。この受信機は、構成要素を共有し、それによって受信機サイズを著しく低減するように有利に構成され得る。この受信機はまた、位置判断において信号の両方のセットが同時に使用されることを有利に可能にし、それによって受信機の位置精度を改善することができる。
【0032】
受信機の概要
図1に、GPSとGLONASSの両方の信号を受信し、復号するための例示的な受信機を示す。一実施形態では、受信機は、2つのチップ(すなわち集積回路)ソリューション、たとえばRFチップ110とベースバンドチップ111とを含むことができる。RFチップ110は、アナログフロントエンド(AFE)101と、GPSのためのデジタルフロントエンド(DFE_GPS)102Aと、GLONASSのためのDFE(DFE_GLO102B)と、マルチプレクサ(MUX)103とを含むことができる。
【0033】
AFE101は、受信されたGPS信号については32MHzまたは64MHzでアナログデジタル変換器(ADC)信号を出力し、受信されたGLONASS信号については64MHzでADC信号を出力する。DFE_GPS102AのDFE出力とDFE_GLO102BのDFE出力とは両方とも16MHzでサンプリングされる。MUX103は、RFチップ110の出力において単一の信号を生成するようにこれらの2つの出力を32MHzに多重化し、それによってチップのピンを節約する。
【0034】
ベースバンドチップ111は、デュアルモードインターフェース104と、複数の検索エンジン105Aと、複数の追跡エンジン105Bとを含むことができる。デュアルモードインターフェース104は、MUX103の出力を受信し、検索エンジン105A用に(たとえば16MHzで)、ならびに追跡エンジン105B用に(たとえば8MHzで)信号を生成することができる。一実施形態では、ベースバンドチップ111は、これらの機能を実行する標準的なチップを用いて実装され得る。
【0035】
アナログフロントエンド
図2Aに、信号(GPSおよび/またはGLONASS)を受信する低雑音増幅器(LNA)201を含む例示的なAFEを示す。表面弾性波(SAW)フィルタ202は、LNA201の出力を受信し、帯域通過フィルタ処理を行うことができる。バッファ203はSAWフィルタ202の出力を受信し、それのバッファされた信号を単一のミキサセット(すなわち単一のI/Qミキサペア)204に与えることができ、セット204のうちの1つのミキサは、局部発振器からcos信号をさらに受信し、セット204のうちの他のミキサは、局部発振器からsin信号をさらに受信する。これらのミキサ出力は、電流電圧ブロック(I2V)205によって電流モードから電圧モードに変換され、次いでポリフェーズフィルタ(PPF)206Aおよび206Bに与えられる。PPF206Aおよび206Bが複素数入力(I/Q)を有し、一般に画像信号を削除し、実数出力(I)を有することに留意されたい。電圧利得増幅器(VGA)207Aおよび207Bは、それぞれPPF206Aおよび206Bの出力を受信する。アナログデジタル変換器(ADC)208Aおよび208B(たとえば2つの8ビットADC)は、それぞれVGA207Aおよび207Bの増幅された出力を受信し、次いで(図2Aにコンテキストのために示してある)DFE−GPS102AおよびDFE_GLO102Bに信号を与える。したがって、上記で説明した構成では、GPSとGLONASSとは、フロントエンド受信機経路、すなわち、LNA201と、SAWフィルタ202と、バッファ203と、ミキサセット204とを共有する。ただし、ミキサセット204の後、GPSとGLONASSとは、異なるPPFと、AGCと、ADCとを使用する。
【0036】
好ましい一実施形態では、単一の局部発振器(LO)220は、ミキサセット204用にcos信号とsin信号の両方を生成するために使用され得る。一実施形態では、LO220のRF周波数は、GPS信号とGLONASS信号とのための所定のIF周波数を取得するために設定され得る。たとえば、図3Aを参照すると、LOのRF周波数302は、1575.42MHzのGPS周波数301と1601.72MHzのGLONASS周波数303との間である1581.67MHzに設定され得る。ミキサセット204の後、得られたGPS IF周波数およびGLO IF周波数は、図3Bに示すように、それぞれ、6.25MHz(312)および20.05MHz(313)である(DC311はコンテキストのために示してある)。
【0037】
図3Cに示す別の実施形態では、LO RF周波数304は1585MHzに設定され得る。この場合、ミキサセット204の後、GPS混合周波数およびGLO混合周波数は、図3Dに示すように、それぞれ10MHz(314)および16MHz(315)である。LO周波数がGLONASS周波数に近づくにつれて、得られたGPS IF周波数とGLONASS IF周波数とがより近接することに留意されたい。
【0038】
図3Eに示すさらに別の実施形態では、LO RF周波数304は、GPS周波数301とGLONASS周波数303との間の中間周波数に設定され得る。この場合、ミキサセット204の後、図3Fに示すように、GPS混合周波数316とGLONASS混合周波数317とは、ほぼ13〜14MHzにおいて重複している。この設定は、GLONASSのための最も低いIF周波数を生じることに留意されたい。
【0039】
特に、LO周波数の設定は、GPSまたはGLONASSのための(たとえばポリフェーズフィルタ206Aおよび206Bのための)フィルタ実装形態に影響を及ぼすことがある。詳細には、LOの周波数をより高く(たとえば、周波数302の代わりに周波数304を使用して)設定することにより、GPSフィルタ(すなわちポリフェーズフィルタ206A)を実装することはより費用のかかる困難なものになり、GLONASSフィルタ(すなわちポリフェーズフィルタ206B)を実装することはより費用のかからないより容易なものになり得る。一方、LO周波数をより低く(たとえば、周波数304の代わりに周波数302を使用して)設定することにより、GPSフィルタを実装することはより費用のかからないより容易なものになり、GLONASSフィルタを実装することはより費用のかかる困難なものになり得る。
【0040】
LO周波数305の場合、ポリフェーズフィルタ206Aおよび206Bは、正または負の周波数に基づいてGPS信号とGLONASS信号とを区別することができることに留意されたい。すなわち、図3Fは、信号が重複しているように見えることを示しているが、GPS信号は実際には負の周波数であり、GLONASS信号は実際には正の周波数である。したがって、ポリフェーズフィルタ206Aおよび206Bは、GPS信号とGLONASS信号とのためのフィルタ帯域幅を調整することができる(GPSについては一点鎖線、GLONASSについては二点鎖線を参照)。ただし、このLO設定は潜在的にI/Q不整合を生じ得、I/Q不整合は別の信号経路への信号結合を生じ得ることに留意されたい。この信号結合は受信機性能を著しく低下させ得る。
【0041】
LO周波数302またはLO周波数304のいずれかを使用することによって、ポリフェーズフィルタ206Aおよび206Bはまた、GPS帯域幅とGLONASS帯域幅とのために有利に調整され得ることに留意されたい(図3Bおよび図3D中で、GPSについては一点鎖線、およびGLONASSについては二点鎖線を参照)。さらに、それらのIF周波数分離はI/Q不整合を軽減し、それによってより良好な受信機性能を保証することができる。ただし、I/Q不整合の存在下でのこのLO設定は、Glonass経路とGPS経路との間の信号結合を生じ得ることに留意されたい。
【0042】
好ましい一実施形態では、LO周波数302は、GPS信号を最適化するために使用される。詳細には、GPS信号の理想的なIF周波数は、DCオフセットと1/f雑音とを回避するためには十分高いが、フィルタ性能を最大にするためには十分低い、ほぼ1〜6MHzの間にある。一実施形態では、ポリフェーズフィルタ106Aの最適化は、ポリフェーズフィルタ106Bに勝る優先度を与えられ得る。たとえば、LO周波数302は低いGPS IF周波数を与えることができ、それにより低コストの、容易に実装されるGPSフィルタが保証されるとともに、GLONASSフィルタを実装するのに費用がかかりすぎたり、実装が困難になることがなくなる。また、図3Bに示すフィルタ帯域幅は明確に別個であり、したがって、図3Dに示すフィルタ帯域幅よりもより良好な受信機性能を与えることができることに留意されたい。
【0043】
一実施形態では、LO周波数とポリフェーズフィルタ中心周波数の両方が調整され得る。この調整は、スパーを回避するため、および/または異なる水晶基準周波数に適応するために有利に使用され得る。この調整機能は、任意の水晶周波数をもつ整数N合成器を用いてLO220を実装することを可能にする。整数N合成器は、単純な実装および最小の位相雑音という利点を有する。一実施形態では、LO周波数およびポリフェーズフィルタ中心周波数の調整は、通常の受信機動作中に動的に実行され得る。
【0044】
別の実施形態では、ポリフェーズフィルタ帯域幅も調整可能であり得る。この帯域幅調整は、受信機性能を最適化するために考慮されるべき干渉除去と感度とのトレードオフを有利に可能にすることができる。たとえば、帯域幅を広くした場合、所望の信号の減衰はほとんどないが、より多くの干渉が可能にされる。一方、帯域幅を狭くした場合、干渉は最小限に抑えられるが、所望の信号は部分的に減衰され得る。このフィルタ帯域幅調整は静的または動的な方法で実行され得る。
【0045】
一実施形態では、ポリフェーズフィルタの各々の通過帯域は正の周波数または負の周波数のいずれかとして選択され得る。たとえば、一実施形態では、GPSポリフェーズフィルタ通過帯域は正の周波数に切り替えられ得る(および、GLONASSポリフェーズフィルタ極性は負の周波数に切り替えられ得る)。そのような切替えは、さもなければGPS信号とGLONASS信号とのうちの1つと干渉するであろうスパーを回避するために使用され得る。この通過帯域選択は静的または動的な方法で実行され得る。
【0046】
フィルタ処理がポリフェーズフィルタ処理によって実行されない場合、たとえば従来のIFフィルタが使用された場合、フィルタ帯域幅は、より広い信号(すなわちGLONASS信号)(一点鎖線のみ)に調整され得ることに留意されたい。従来のIFフィルタ構成はポリフェーズフィルタのIFフィルタ構成よりも単純であろう。さらに、従来のフィルタ構成は、ポリフェーズフィルタに比較して電力を節約することができる。しかしながら、従来のフィルタ構成はまた、I/Q不整合が増加しやすく、したがって、望ましくない信号結合が起こりやすいことがある。さらに、従来のフィルタ構成を使用することによって、ある程度の(たとえば3dB程度の)信号対雑音(SNR)劣化が生じ得る。
【0047】
図2Bに、AFE101’の別の例示的な実施形態を示す。この実施形態では、I2Vブロック205は除去され、ミキサセット204の代わりにミキサセット210Aおよび210Bが使用される。この構成では、各ミキサセットのミキサは、それらのそれぞれのPPFに直接与えられる。ミキサセット210Aおよび210B中の各ミキサには依然としてLO220が与えられ得ることに留意されたい。AFE101’は、AFE101(図2A)よりも良好な線形性および雑音性能を与え得る。しかしながら、AFE101はLNA201の負荷がより低く、これにより潜在的により高い利得を与えることができる。
【0048】
一実施形態では、GPS自動利得制御(AGC)ブロック2006AおよびGLO AGCブロック2006B(オフチップ、コンテキストのために示してある)は、それぞれDFE_GPS102AおよびDFE_GLO102Bから入力を受信することができる。一実施形態では、AGC入力は、DFEからの16MHz複素数(I/Q)2ビットサンプルであり得る。GPS AGC2006Aは、バッファ203、PPF206A、およびVGA207Aの利得を制御する。対照的に、GPS AGC2006Bは、PPF206BおよびVGA207Bの利得を制御する。
【0049】
GPSデジタルフロントエンド(DFE)
従来のGPS受信機は、概して1または2ビットADCを使用しているが、受信GPS信号は、通常、熱雑音フロアを下回るので、それで十分である。たとえば、熱雑音電力は一般的なアナログフィルタでは約−110dBmであるが、GPS信号の受信電力は−130dBm以下である。この場合、ADCによってもたらされる量子化雑音が熱雑音に比較して無視できる限り、全体的な性能は低下しない。
【0050】
上記のように、ADC入力においてGPS信号および熱雑音のみが存在すると仮定している。しかしながら、ADC入力において干渉信号も存在する場合、ひどいクリッピングを回避するために、ADCダイナミックレンジの一部を干渉のために割り振らなければならない。したがって、所望の信号はサイズが小さくなり、熱雑音に対する量子化雑音は増加し、性能は低下する。
【0051】
実際の使用において、周波数スペクトルはすべての種類のRF信号でパックされ、そのうちのいくつかは保護GPS帯域から数十MHzしか離れていない。さらに、チップ中のデジタルクロックのRF漏れまたは高調波はGPS帯域において非常に近接してまたは均等に見え得る。残念ながら、ADC入力において信号を干渉のない状態にすることは、アナログ回路設計において非常にコストがかり、かなりの電力と面積とを消費する。
【0052】
改善されたAFEの1つの実施形態によれば、アナログ設計要件が緩和され得る。詳細には、マルチビットADC(たとえば、図2A、ADC208Aおよび208Bの各々については8ビット実装形態)が使用され得、それによって、一部の干渉が通過することを可能にする。次いで、この干渉はデジタル的に抑制され得る。特に、DFEは、AFEに比較してより小さく、より低電力であるので、この実装形態は商業的に選好される。さらに、集積回路技術はより小さいジオメトリに縮小し続けているので、AFEに比較して、DFEはより良くスケーリングする。
【0053】
概して、DFEは、ADCとベースバンドモジュールの残部との間に位置するものとして特徴づけられ得る。以下で説明するDFEは、1つまたは複数のスパーと、DCオフセットと、ブロッカーとを削除するように構成され得る。一実施形態では、DFEは、複数ビット入力を2ビット出力に低減することができる。特に、コアデジタル回路の面積と電力とが維持され得るように、出力ビット幅は標準的なADCビット数に切り捨てられ得る。
【0054】
図4に、低域フィルタ(LPF)402と、マルチプレクサ(MUX)403と、帯域通過フィルタ(BPF)404と、スパー推定および消去(SEC)ブロック405〜406と、DC推定および消去(DEC)ブロック407と、デジタルミキサ(DM)408と、積分およびダンプデシメーションブロック409と、量子化器410とを含むことができる例示的なDFE_GPS102A(図1)を示す。一実施形態では、BPF404と、SEC405および406と、DEC407と、DM408とは、32MHzと64MHzの両方のADCモードにおいて32MHzで動作することができる。
【0055】
DFE_GPS102Aのこの実施形態では、MUX403は、(コンテキストのために示してある)ADC208Aと(ADC208からそれの入力を受信する)LPF402とから入力を受信することができ、出力を帯域通過フィルタ(BPF)404に与えることができる。ADCサンプル周波数は、エイリアシングを回避するために32または64MHz(2つの動作モード)で動作することができることに留意されたい。
【0056】
ADC208が64MHzで動作するとき、LPF402は25〜27MHzで画像を抑制するために使用され得る。一実施形態では、LPF402中の2:1デシメータがクロックを32MHzに低減することができる。対照的に、ADC208が32MHzで動作するとき、MUX403を使用してLPF402はバイパスされ得る。いずれの場合も、(32MHzで動作する)BPF404は干渉をフィルタ除去することができる。
【0057】
一実施形態では、LPF402は(図5により詳細に示される)固定係数7タップフィルタとして実装され得る。LPF402は、64MHzから32MHzへのデシメーションの前に(IF=5〜7MHzの場合)25〜27MHzで画像を30dBだけ抑制するように構成され得る。
【0058】
図5に、デイジーチェーンにおける複数のレジスタ501(1)〜501(6)と複数の乗算器502(0)〜502(6)とを含む例示的なLPF402を示し、各レジスタへの入力はそれの関連する乗算器にも与えられる(たとえば、ラッチ501(5)への入力は乗算器502(5)にも与えられる)。乗算器502(0)〜502(6)は、それぞれフィルタ係数H(0)〜H(6)をさらに受信する。一実施形態では、フィルタ係数は、固定され、中央タップに関して対称であり得る。乗算は、ビットシフトと加算とによって実装され得る。各タップ(すなわち各ミキサ)の出力は合計ブロック503に与えられ、合計ブロック503は出力504を生成する。2:1デシメーションにより、2つの出力サンプルごとに1つのみを計算すればよいことに留意されたい。デシメーションは、入力においてフィルタ係数を2つのセット(2つの位相)に分割することによって行われ得る。
【0059】
図6に、デイジーチェーンにおける複数のレジスタ601(1)〜601(12)と複数の乗算器602(0)〜602(12)とを含む例示的なBPF404を示し、各レジスタへの入力はそれの関連する乗算器にも与えられる(たとえば、レジスタ601(11)への入力は乗算器602(11)にも与えられる)。乗算器602(0)〜602(11)は、それぞれフィルタ係数H(0)〜H(12)をさらに受信する。乗算は、ビットシフトと加算とによって実装され得る。タップの出力は合計ブロック603に与えられ、合計ブロック603は出力604を生成する。
【0060】
帯域外ブロッカーと雑音とを抑制するように構成されたBPF404は、IF周波数を中心とし、通過帯域と阻止帯域とによって指定され得る。IF周波数は基準水晶に応じて変化し得、通過帯域および阻止帯域は相関ピークおよび干渉除去の必要とされるシャープネスに応じて変化し得るので、フィルタ係数はソフトウェアによって構成され得る。このために、ハードコードされたタップの代わりに汎用乗算器が使用され得る。一実施形態では、帯域外干渉がない場合、BPF404はバイパスされ得る。
【0061】
図7に例示的なSEC405を示す。この実施形態では、SEC405は、スパーがシングルトーンであると仮定し、それの振幅と位相とを推定することを試み、スパーを再構成し、スパーを減算する。位相雑音は、スパーを不鮮明にし、トーンの周りに「スカート」を作成し得るが、シングルトーンを消去した後の残余誤差が無視でき、したがってSEC405によって無視され得ることに留意されたい。帯域内にノッチがあるとき、信号をひずませることなしに狭いノッチフィルタを構築することは極めて困難であるので、このシングルスパー推定/減算は、ノッチフィルタを通して信号をパスするよりも良好に動作することにさらに留意されたい。
【0062】
SEC405において、数値制御発振器(NCO)701は、受信スパー周波数(f_spur_over_f_ADC)を使用してスパーの位相を生成するために使用され得る。一実施形態では、SEC405における最大サンプルレートは32MHzに設定され得る。ターゲット周波数誤差0.01Hz(すなわち、1秒中の位相誤差3.6度)の場合、NCOにおいて32ビットが使用され得る(たとえば、log2(32e6/0.01)−1=31ビットであり、便宜上32ビットに増加させる)。
【0063】
(たとえば、残差−130dBm未満の)完全な消去を得るために、スパー振幅および位相の正確な推定値が必要である。したがって、sin/cosテーブル702の分解能の要件は、このように(当業者に知られており、したがって本明細書では詳細に説明しない)ドップラーワイパーの分解能の要件よりも厳しい。一実施形態では、スパー推定および再構成は、いくつかの小数ビットを使用し得ることに留意されたい。
【0064】
スパー推定のアルゴリズムは以下のように計算され得る。入来信号のスパーは次の通りであると仮定する。
【数1】
【0065】
この値に(共役生成器703によって計算された)スパーフェーザ(spur phasor)の共役を乗算して、以下を得ることができる。
【数2】
【0066】
したがって、乗算器704の出力は次の通りである。
【数3】
【0067】
この結果は、大きいブロックサイズにわたって(アキュムレータ705によって)平均化され(ブロック706において記憶され)得る。一実施形態では、デフォルトサイズはN=4096サンプルであり、最大サイズは218=262144サンプルまたは8msであり得る(ダンプ信号がブロック706にアサートされると、推定値が更新されることに留意されたい)。この平均化中に、第2の期間は逓減し、(固定である)第1の期間はそのままである。以下の式によって生成された得られた複素数値は、スパーの振幅と位相とを表す。
【数4】
【0068】
スパーを消去するために、この複素数値に(乗算器707を使用して)スパーフェーザを乗算することができ、(ブロック708によって記憶された)実数部は以下によって表される。
【数5】
【0069】
この値は再構成されたスパーを表し、(加算器709を使用して)原信号からこの値を減算すると、スパーを事実上消去することができる。
【0070】
この実施形態では、乗算器704は複素複素乗算器であり得る。アキュムレータ705は、最大ブロックサイズをサポートすることができるフォーマットであり得る。乗算器707は、スパー消去のための複素複素乗算器として実装され得る。以下で説明するように、加算器709のフォーマットは、SEC406が使用中かどうかに応じていくつかの符号付き小数ビットを含むことができる。一実施形態では、(図8に関して説明するように)飽和が使用され得る。
【0071】
図4に示す実施形態では、DFE_GPS102Aは2つのSEC(すなわち、SEC405とSEC406と)を含む。SEC405とSEC406とを連結することは、2つの別個のスパーを推定し、消去することを可能にすることができる。図8に、SEC405に関して説明した構成要素に加えて、丸め器ブロック801と、マルチプレクサ802と、飽和ブロック803とをさらに含む例示的なSEC406を示す。この実施形態では、SEC405から受信された信号を(丸めブロック801によって)丸めることができ、スパー推定のための小数ビットを除去することができる。この丸めは、SEC405の場合のように同じ乗算器の再利用を可能にする。特に、小数ビットは第1のスパー周波数におけるエネルギーを表すので、丸めにもかかわらずSEC性能は低下しない。
【0072】
(SEC2イネーブル信号によって判断されるように)SEC405とSEC406の両方が使用された場合、MUX802はそれの出力のために加算器709の出力を選択する。一方、SEC405のみが使用された場合、MUX802はそれの出力のために受信信号を選択する(すなわち、加算器709をバイパスする)。SEC405出力においてフルレンジを保つことは、SEC406において強いスパーが消去されることを可能にし(さもなければクリッピング/ひずみが生じ得る)、SEC405およびSEC406の入力フォーマットを同様にする。SEC406の後、信号サイズは著しく低減され得る。したがって、一実施形態では、飽和ブロック803は、それの出力のために、低減されたビットセットを生成することができる。特に、第2のスパーの推定は、第1のスパーが推定され、消去が開始した後にのみ行われる。したがって、この技法は、推定および消去プロセスの安定性を保証することができる。
【0073】
一実施形態では、スパーが存在しない場合、SEC405と406の両方がマルチプレクサバイパス(図示しないが、図8に示すものと同様)を使用してバイパスされ得る。この場合、MSBは飽和され得、LSBは0でパディングされ得る。
【0074】
スパー推定および消去が有効化された場合、ハードウェアリセットおよび利得変更後に新しい推定が実行され得る。推定/消去は、1信号ブロックを要し、ブロックの直後に利用可能である。推定/消去は、連続的にまたは周期的に動作することができることに留意されたい。周期的に動作する場合、周期は、許容できる累積位相誤差に基づいて判断され得る。たとえば、746msは、32MHzサンプルレートおよび32ビットNCOで終端に向かって約1度の位相誤差を与える。したがって、この場合、消去は連続的に実行されるべきである。一実施形態では、次の推定が利用可能になるまで、直近のスパー振幅と位相推定とが使用され得る。
【0075】
図9に、DC推定および消去を行うことができる例示的なDEC407を示す。この実施形態では、DEC407は、サンプルカウントによって正規化されたアキュムレータ905を含むことができる。DCは、1ブロックのサンプル(デフォルトN=4096、最大サイズは215=32768または1ms)を使用して推定され(ブロック906によって記憶され、ダンプ信号によってトリガされ)、結果はブロックの直後に適用され得る。
【0076】
一実施形態では、量子化誤差を低減するために、小数ビットがブロック平均に保たれ得る。たとえば、8ビットADCの出力中に、非対称コードワード(−128〜127)に起因するシステマティック−0.5*LSBバイアスがあることに留意されたい。ブロッカーのための十分なヘッドルームを残すためにGPS信号が小さいサイズであるとき、この0.5LSBはGPS信号自体に比較して無視できないことがある。この場合、それが削除されない場合、2ビット量子化器(QUAN)410はバイアスされた出力をも生成し、それによって性能に悪影響を及ぼし得る。特に、小数ビットを可能にすることは、有利には、そのような小さいが無視できないDC値を削除するために十分な分解能を与えることができる。
【0077】
BPF404が有効化されると、設計によってDC成分が30dBだけ抑制され得ることに留意されたい。この場合、DEC407はバイパスされ得る。(DECイネーブル信号によって判断されるように)DEC407が使用された場合、MUX908はそれの出力のために加算器907の出力を選択することができる。一方、DEC407がバイパスされるべきである場合、MUX908はそれの出力のために(たとえば、SEC406からの)受信信号を選択することができる。一実施形態では、飽和ブロック909は、MUX908からの出力を受信し、出力を生成することができる。DEC407が使用されたとき、ハードウェアリセットおよび利得変更後に新しい推定が実行され得る。DEC推定は、連続的にまたは周期的に動作することができる。周期的に動作する場合、周期はDCのドリフト特性によって判断されるべきである。一実施形態では、消去は、直近の推定を用いて連続的に動作することができる。DEC407がバイパスされたとき、0小数ビットがパディングされ得ることに留意されたい。
【0078】
図10に、DEC407の出力を受信する2つのミキサ1001Aおよび1001Bを含む例示的なDM408を示す。一実施形態では、DM408は、32MHz(すなわち、AFE101におけるDFE_GPS102A出力サンプリングレートの2倍の速度)で動作することができる。DM408は、IF(f0)を中心とする通過帯域信号をベースバンドに変換することができる。キャリアNCO1003は16ビット幅であり得る。入力周波数のステップサイズは、fstep=32MHz/216=488.28125Hzである。変換後に必要とされる残留周波数オフセットは少なくともΔfであり、ただし、Δfは、通常、最大ドップラー周波数よりも大きいと仮定する。次いで、丸めIF周波数は次のように計算され得る。
【数6】
【0079】
この計算は、残留周波数
【数7】
【0080】
がΔfよりも大きいことを保証する。図10に示すように、DM408は、1経路(I)入力および2経路(I/Q)出力を有する。I経路に
【数8】
【0081】
を乗算することができ、Q経路に
【数9】
【0082】
を乗算することができる。
【0083】
図11に、それぞれ(コンテキストのために示してある)マルチプレクサ1001Aおよび1001Bから入力を受信する2つの積分およびダンプブロック1101Aおよび1102Bを含むことができる例示的なID2 409を示す。一実施形態では、I&Dブロック1101Aおよび1101Bの各々は、信号を32MHzから16MHzにダウンサンプリングするための単純な2:1積分およびダンプデシメーションを使用して実装され得る。信号はすでにベースバンドに混合されているので、BPF阻止は+/−5MHzを越えて30dBであることに留意されたい。したがって、積分およびダンプの前に低域フィルタを必要としない。I&D1101Aおよび1101Bは、各々、それらのそれぞれの、(コンテキストのために示してある)QUAN410の量子化器に2ビットを与えることができる。
【0084】
図12に、それの入力を(符号ブロック1201によって生成された)符号ビットと(大きさブロック1202によって生成された)大きさビットとに変換することができる例示的な2ビット量子化器を示す。符号ビットは、正の場合は「0」、負の場合は「1」に等しい。大きさビットは(コンパレータ1203を使用して)しきい値と比較される。大きさがしきい値以上である場合、コンパレータ1203は「1」を出力する。他の場合、コンパレータ1203は「0」を出力する。一実施形態では、2ビットフォーマット(符号、大きさ)を使用して4つのレベルを表すために(組合せブロック1204を使用して)符号と大きさとが組み合わせられ得、ただし、(2ビットADC出力フォーマットに適合可能であり得る)00=+l、01=+3、10=−1、および11=−3である。量子化しきい値は所望の信号サイズから判断され得る。
【0085】
図13A〜図13Fに、64MHzのADC周波数および6MHzのIF周波数についての例示的なシミュレーション結果を示す。このシミュレーションでは、受信信号中に、IFから0、1、および5MHz離れた、すべて同じ85dBmレベルの3つのスパーがある。図13Aは、ADCの出力における電力スペクトル密度(PSD)を示す第1のプロットである。図13Bは、LPFの出力におけるPSDを示す第2のプロットである。図13Cは、BPFの出力におけるPSDを示す第3のプロットであり、5MHzスパーはBPFによってすでに抑制されている。図13Dは、SECにおけるPSDを示す第4のプロットであり、SECは、キャリアから0および1MHz離れた2つのスパーを推定し、消去するように構成されている。スパーは消去後にほとんど見えないことに留意されたい。再構成されたスパー中の量子化雑音により、はるかに低電力の少数の帯域外スパーが作成される。図13Eは、DM出力におけるPSDを示す第5のプロットである。−6MHzの信号はDCまで回転され、+6MHzの画像は+12MHzまで回転される。図13Fは、DFEの出力におけるPSDを示す第6のプロットであり、ID2および2ビット量子化は行われている。この時点で、信号は32Mspsから16Mspsにダウンサンプリングされている。雑音フロアは量子化により引き上げられる。12MHz(または−4MHz)の周りのバンプは、画像雑音によって生じるが、帯域内信号には影響を及ぼさない。
【0086】
GLOデジタルフロントエンド(DFE)
図15に、19MHzと21MHzの間のIF周波数と、64MHzのADCサンプル周波数とを有する例示的なDFE_GLO102Bを示す。この実施形態では、DFE_GLO102B(図1)は、スパー推定および消去(SEC)ブロック1502〜1503と、デジタルミキサ(DM)1504と、低域フィルタ1505〜1506と、量子化器(QUAN)1507とを含むことができ、すべてが直列に結合される。SEC1502は、(コンテキストのため示してある)ADC208Bの出力を受信することができることに留意されたい。一実施形態では、SEC1502〜1503は必要に応じて独立して有効化/無効化され得、DM1504と、LPF1505〜1506と、QUAN1507とは常に有効化され得る。
【0087】
図16に例示的なSEC1502を示す。SEC1502は、信号ダイナミックレンジを低減するために大きいスパーを削除するように構成され得るが、GPS SECよりも大きい残余スパーを残すことができることに留意されたい。すなわち、GLONASSがFDMAであるので、(より高い残余スパー電力をもつ)不良チャネルはより容易に廃棄され得る。SEC1502および1503の出力においてフルレンジを保つことにより、LPF1505およびLPF1506において強い帯域外スパーおよびブロッカーが抑制されることが可能になる。
【0088】
SEC1502において、数値制御発振器(NCO)1601(たとえば32ビット)は、受信スパー周波数を使用してスパーの位相を生成するために使用され得る。一実施形態では、SEC1502における最大サンプルレートは64MHzに設定され得る。スパー周波数は符号付きであり、サンプル周波数の半分よりも大きくないことに留意されたい。
【0089】
(たとえば、残差−130dBm未満の)完全な消去を得るために、スパー振幅および位相の正確な推定値が必要である。sin/cosテーブル1602の一実施形態では、角度分解能は1象限に対して(pi*2)/512または128レベルであり得、出力ビット幅は8であり得る。sin/cosテーブル1602において4象限をカバーするために符号拡張が使用され得ることに留意されたい。
【0090】
sin/cosテーブル1602を使用してスパー推定のアルゴリズムを計算した後、この数値にスパーフェーザの共役を乗算することができる(共役生成器1603によって共役が実行され、乗算器1604によって乗算が実行される)。乗算器1604の出力は、(アキュムレータ1605によって)平均化され(ブロック1606において記憶され)得る。一実施形態では、デフォルトサイズはN=8192サンプルであり、最大サイズは219=524288サンプルまたは8msであり得る(ダンプ信号がブロック1606にアサートされると、推定値が更新されることに留意されたい)。スパーを消去するために、ブロック1606によって記憶された複素数値に、乗算器1607を使用してスパーフェーザを乗算することができる。(ブロック1608によって与えられた)再構成されたスパーの実数部は、加算器1609を使用して原信号から減算され得る。
【0091】
この実施形態では、乗算器1604はスパー推定のために複素複素乗算器によって実装され得る。アキュムレータ105は、最大ブロックサイズをサポートするフォーマットであり得る。乗算器1607は、スパー消去のための複素複素乗算器によって実装され得る。一実施形態では、飽和(ブロック1610)は、加算器1609の出力を、小数ビットを含む数値から整数ビットのみに丸めるために使用され、それによってダウンストリームDFE_GLOモジュール(たとえばDMおよびLPF)のビット幅を低減することができる。
【0092】
SEC1503は、SEC1502について上記で説明した構成要素と同様の構成における同様の構成要素を使用して実装され得ることに留意されたい。SEC1502とSEC1503とを連結することは、2つの別個のスパーを推定し、消去することを可能にすることができる。SEC1502および1503の両方が有効化された場合、第1のスパーが推定され、消去が開始した後にのみ、スパー推定が行われ、それによって推定および消去プロセスの安定性を保証する。
【0093】
図17に、SEC1503の出力を受信する2つのミキサ1701Aおよび1701Bを含む例示的なDM1504を示す。DM1504は、IF(f0)を中心とする通過帯域信号をベースバンドに変換することができる。一実施形態では、キャリアNCO1703は16ビット幅であり得る。入力周波数のステップサイズは、fstep=64MHz/216=976.5625Hzであり得る。周波数f0は、GLONASS帯域の中間に、すなわちチャネル−1とチャネル0との中間(20.05MHz)に設定され得る。最小のポストDM残余周波数オフセットは300kHzであり得る。デジタルIF周波数は次のように計算され得る。
【数10】
【0094】
丸めによる残余IF周波数は、それぞれミキサ1701Aおよび1701Bのデュアルモードインターフェースにおける出力に基づいて丸めブロック1704Aおよび1704Bによって生成され得る。
【0095】
図17に示すように、入力信号はI経路およびQ経路として複製され得る。I経路に
【数11】
【0096】
を乗算し、Q経路に
【数12】
【0097】
を乗算する。
【0098】
LPF1505および1506は、帯域外(たとえば12〜32MHz)ブロッカーと雑音とを30dBだけ抑制するように構成され得る。図18に、デイジーチェーンにおける複数のレジスタ1801(1)〜1801(6)と複数の乗算器1802(0)〜1802(6)とを含む例示的なLPF1505を示し、各レジスタへの入力はそれの関連する乗算器にも与えられる(たとえば、レジスタ1801(5)への入力は乗算器1802(5)にも与えられる)。乗算器1802(0)〜1802(6)は、それぞれフィルタ係数H(0)〜H(6)をさらに受信する。一実施形態では、フィルタ係数は、固定され、中央タップに関して対称であり得る。乗算は、ビットシフトと加算とによって実装され得る。各タップ(すなわち各ミキサ)の出力は累積ブロック1803に与えられ得、累積ブロック1803は出力1804を生成する。2:1デシメーションにより、2つの出力サンプルごとに1つのみを計算すればよいことに留意されたい。デシメーションは、入力においてフィルタ係数を2つのセット(2つの位相)に分割することによって行われ得る。
【0099】
LPF1506は、32MHzから16MHzへのデシメーションの前に、12MHz〜16MHzで30dBだけさらなるフィルタ処理を行うように構成され得る。一実施形態では、LPF1506はLPF1505と同様の構成を有することができるが、合計ブロック1813の出力は比較的少数のビットを有し得る。LPF2/DECIの後、信号サイズが著しく低減され得、したがって、より少数のビットが出力のために使用され得ることに留意されたい。一実施形態では、ダウンストリーム量子化器の分解能を高めるために、小数ビット(この場合は4つの小数ビット)はLPF1506の出力において保たれ得る。
【0100】
QUAN1507は、GPS QUAN(たとえば、図11および図12)について説明した構成と同様の構成を使用して実装され得る。たとえば、16MHzにおける2つの2ビット量子化器がIチャネルとQチャネルのために使用され得る。一実施形態では、これらの2ビット量子化器は常にオンであり得る。これらの量子化器は、2ビットフォーマット(符号、大きさ)を使用してそれらの入力を4つのレベルに変換することができる。
【0101】
一実施形態では、GLO C/Aコードは27dBの逆拡散利得(de-spreading gain)を与え得る。スパーの逆拡散利得はスパーの周波数に依存する。最大逆拡散利得は、信号からnkHz離れたスパーについて達成され得、ただし、nは整数である。これらのすべてのn kHz周波数オフセットについての逆拡散利得は13.5dBである。
【0102】
非活動化回路
図19に、有利には、図1に示す受信機の構成要素を制御することができる非活動化回路1900を示す。一実施形態では、非活動化回路1900は、DFE_GPS102と、DFE_GLO102Bと、MUX103と、デュアルモードインターフェース104とを制御することができる。非活動化回路1900は、今度は、(ソフトウェアで実装された)ナビゲーションエンジン1901によって制御され得る。一実施形態では、受信機によってGPS信号またはGLONASS信号のうちの1つのみが使用されているとき、非活動化回路1900は、DFE_GPS102A、DFE_GLO102B、および/またはデュアルモードインターフェース104中に設けられたいくつかの専用回路を電源切断することができる。
【0103】
インターフェースカウンタデバイスおよび自動利得制御
図20に、(上記で説明した)RFチップ110と、ベースバンド(BB)チップ111と、GML(GNSS測定レイヤSW)2012とを含むロケーション判断システムを示す。BBチップ111は、(図1に関して説明した構成要素に加えて)デマルチプレクサ2001とインターフェースカウンタデバイス(ICD)2002とを含むことができる。ICD2002は、GPS DFE2経路(I/Q)2ビット出力またはGLO DFE2経路(I/Q)2ビット出力のいずれかをとることができる。
【0104】
GML2012は自動利得制御(AGC)ユニット2006を含むことができ、AGCユニット2006はGPS AGC2006AとGLO AGC2006B(図2Aを参照)とを含むことができる。AGCユニット2006は、電力がターゲットを達成するかまたは利得変更の最大数に達するまで、信号電力を連続的に測定し、測定された信号電力を所望のターゲットサイズと比較し、アナログ利得段を更新することができる。一実施形態では、AGC電力測定ウィンドウサイズは0.25msから32msまでに設定され得る。一実施形態では、GPS AGC2006AおよびGLO AGC2006Bは、2048〜65536の間のブロック長さを使用して、電力測定を16MHzで動作させることができる。
【0105】
ICD2002は、数値(−3、−1、+1、+3)をもつ2ビットデータストリーム中の+/−3の数をカウントし、AGC電力測定のためにその数をGML2012に与えることができる。大きさ=3をもつサンプルの比率が所望のターゲットを達成するまで、AGCユニット2006は利得を調整することができる。(MUX103によって多重化し、DEMUX2001によって多重分離した後の)通常動作では、ICD2002は、GPS AGC動作中にGPS DFE102AのI2Q2出力を、またはGLONASS AGC動作中にGLO DFE102BのI2Q2出力を測定することができる。GPS AGC動作とGLO AGC動作とは同時にでなく直列に行われ得、それによってICD2002がGPSとGLONASSの両方によって共有されることが可能になることに留意されたい。
【0106】
デバッグのために、ICD2002はまた、2ビット量子化器しきい値を較正するために、システムにおける他の2ビット量子化器の出力、たとえば(図24および図25に関して説明する)GLONASSチャネル選択ミキサのI2Q2出力、および検索エンジン105Aにおける粗ドップラーワイパー(図26のミキサ2603参照)のI2Q2出力を測定するように構成され得る。
【0107】
たとえば、図26に示す例示的な検索エンジン2600を参照すると、検索エンジン2600内のモジュールは、粗ドップラーワイパー2603(IR粗ミキサ)出力を2ビットに量子化し得る。DFEおよび検索エンジン動作モードは、雑音電力スペクトル密度、したがって検索エンジン2600におけるI&Dブロック2601の出力信号サイズを変更するので、量子化しきい値はDFEおよび検索エンジン動作モードに依存する。雑音が狭帯域であるほど、サンプルはより相関し、積分およびダンプ(I&D)後の出力は高くなる。I&Dブロック2601における出力が高いほど、IR粗ミキサ2603における出力は高くなり、それによってより高い量子化器しきい値が必要になる。一実施形態では、(入力信号のRMSに等しい)2ビット量子化しきい値の場合、出力サンプルのほぼ33%が+/−3になり得る。したがって、量子化器2606の出力を監視することは、有利には、ハードウェア中でしきい値を最適化することを可能にすることができる。
【0108】
一実施形態では、(図示せず、ICD2002をデバッグするために使用される)4:1マルチプレクサは、(1)DFE_GPS102AのI2Q2出力と、(2)DFE_GLO102BのI2Q2出力と、(3)GLONASSチャネル選択ミキサ2403(12個のミキサのいずれか)のI2Q2出力と、(4)粗ドップラーワイパー出力(たとえば、ミキサ2603)のI2Q2出力とを受信することができる。
【0109】
図21に、GPS DFE動作2101およびGLO DFE動作2106の例示的なタイミング図を示す。一実施形態では、GPS AGC(たとえばGPF AGC2006A)は、GPSとGLONASSとによって共有されるLNA(たとえばLNA201)の利得を制御することができる。GPS AGCのレース状態ならびに性能低化を回避するために、GLONASS AGC電力測定はGPS AGC動作後に行われ得る。たとえば、1つのAGC動作期間2102中にGPS AGC動作2103が実行され得る。生じたGPS AGCロックの後、GPSスパー推定(SE)2105が開始することができる。同時に、GLO DFE動作2106およびGLO AGC動作2107が開始することができる。生じたGLO AGCロックの後、GLO SE動作2109が開始することができる。
【0110】
図22に、例示的なGPS AGC動作2201を示す。過渡期間2202は、スパー推定期間2203とスパー消去期間2204とに先行する。無効なデータを含む過渡期間2202は、ハードウェアリセットまたは利得変更後に発生する。したがって、DFE動作は過渡期間2202の後にのみ行われる。この実施形態では、GPS DFEは、DC推定(および消去)ならびにスパー推定(および消去)の両方を含むことができる。スパーがDCに近いときに問題であり得る、スパー推定からDC推定への干渉を回避するために、DC推定期間2205はスパー推定期間2203後に発生する。DC消去期間2206はDC推定期間2205の後にくる。したがって、サンプルの第1のブロック2210はスパー推定のために使用され得、サンプルの第2のブロック2211は、スパー消去を有し、DC推定のための使用され得、サンプルの第3のブロック2212(および、サンプルのすべての後続のブロック)は、スパーとDCの両方の消去を有し、AGC電力測定期間2207中に使用され得る。図22には、簡単のために、1つのスパー推定期間2203とスパー消去期間2204とを示してあることに留意されたい。したがって、両方のSECユニットが使用されたとき、第2のスパー推定期間は、第1のスパー推定期間2203に後続し、DC推定および消去期間は第2のスパー推定期間の後(すなわち第2のスパー消去期間中)にのみ開始する。
【0111】
図23に、例示的なGLONASS AGC動作2301を示す。過渡(無効なデータ)期間2302は、スパー推定期間2303とスパー消去期間2304とに先行する。GLONASS DFEがDC推定または消去を有しないことに留意されたい。したがって、(スパー推定が有効化されていると仮定すると)スパー推定期間2303が完了した後、GLONASS AGC電力測定期間が発生し得る。このタイミングは、有利には、AGC電力測定とのスパー干渉を防ぐことができる。
【0112】
一実施形態では、GPSおよびGLONASSのためのスパー推定ならびにGPSのためのDC推定が、ハードウェアリセットの後、毎回のAGC電力測定の前に実行され得る。その後、所定の数のブロックの後にスパーおよびDC推定が周期的に反復され得る。一実施形態では、所定のブロック数が0に設定された場合、推定は1回しか実行されず、反復されない。期間が1である場合、推定はブロックごとに、または連続的に行われる。
【0113】
GPSおよびGLONASS AGC動作は周期的に実行され得る。一実施形態では、これらの動作は、各後続のAGC動作期間中に反復され得る。たとえば、再び図21を参照すると、後続のAGC期間2108中に、GPS AGC動作2104は、GLONASS AGC動作2109に先行することができる(他の動作は簡単のために図示せず)。そのときスパーまたはDC推定が進行中である場合、スパーまたはDC推定器がリセットされ得、新しい推定を開始することができることに留意されたい。
【0114】
デュアルモードインターフェース
再び図1を参照すると、デュアルモードインターフェース(DMI)104は、処理されたDFE出力信号を検索エンジン105Aと追跡エンジン105Bとに与えることができる。図24に、デマルチプレクサ(DEMUX)2402と、チャネル選択ミキサ2403と、2つの積分およびダンプ(I&D)ユニット2404Aおよび2404Bと、第1のスイッチマトリックス2405と、第2のスイッチマトリックス2406とを含む例示的なDMI104を示す。(コンテキストのために示してある)MUX103は、RFチップ110の出力において2つの16MHz GPS信号とGLO信号とを一緒に多重化する(図1を参照)。したがって、DEMUX2402は、ベースバンドチップ111の入力において2つの信号を分離することができる。
【0115】
GLONASSは、14チャネルをサポートするFDMAシステムである。(たとえば、DCにおいてまたは実質的にDCにおいて)GLONASS信号をベースバンドにダウンコンバートするために、チャネル選択ミキサ2403が使用され得る。それらの14チャネルの中心周波数は次の通りである。
【数13】
【0116】
上式で、kは−7、−6、−5、...、5、6である。
【0117】
GLONASSチャネル間隔は562.5kHzである。一実施形態では、局部発振器(LO)周波数は1581.67Hzであり、DMI周波数は20.05MHzである。したがって、チャネル選択ミキサ2403の各々の前の入力周波数は次の通りである。
【数14】
【0118】
上式で、kは−7、−6、−5、...、5、6である。
【0119】
図25に、ほぼ250Hzの分解能を与えるために便宜上16ビットのキャリアNCO2503を使用する例示的なチャネル選択ミキサ2403Aを示す。プログラムされたチャネル周波数は次のように計算され得る。
【数15】
【0120】
上式で、f_inはチャネル選択ミキサ2403のための入力サンプリングレート(たとえば、約16MHz)である。
【0121】
乗算器2501は、I/Q信号に5ビットを乗算し、その積を量子化器(QUAN)2504に与える。図12に例示的なQUAN2504のための構成を示す。この実施形態では、電力判断のために大きさビットのみがカウントされることに留意されたい。すなわち、従来の電力判断では、符号と大きさの両方が2乗され、累積される。GLONASSでは3つのレベルのみが可能なので、このプロセスは、有利には、大きさビットだけをカウントし、この情報を乗算器2501に与えることによって簡略化され得る。
【0122】
一実施形態では、第1の(すなわち符号)ビットは、正の場合は「0」に等しく、負の場合は「1」に等しい。第2のビットである大きさは、QUAN2504においてしきい値と比較され得る。大きさがしきい値よりも大きい場合、出力は「1」である。他の場合、出力は「0」である。2ビットフォーマット(符号、大きさ)を使用して4つのレベルを表すために、符号と大きさとを一緒に組み合わせることができ、ただし、00=+l、01=+3、10=−1、および11=−3である。一実施形態では、QUAN2504の最適なしきい値は29である。このしきい値は、制御レジスタを介してプログラム可能であり得る。
【0123】
積分およびダンプ(I&D)ブロック2404Aおよび2404Bは、DEMUX2402およびチャネル選択ミキサ2403の出力に対して16MHzから8MHzへのデシメーションを実行する2ビット入力および3ビット出力モジュールとして実装され得る。一実施形態では、GPSのための1つのI&Dブロック2404Aと、GLONASSのための14個のI&Dブロック2404B(すなわち、チャネル選択ミキサごとに1つのI&Dブロック)とがある。GLONASSは、チッピングレート1023チップ/msのGPSよりも低いチッピングレート、すなわち511チップ/msを有することに留意されたい。したがって、一実施形態では、I&D2404AはI&D2404Bと異なるダンプ時間を有し得る。別の実施形態では、I&D2404AとI&D2404Bの両方は固定比2:1、たとえば、入力16MHz、出力8MHzを有し得る。一実施形態では、ダンプ時間はプログラム可能であり得、ソフトウェアによって判断され得る。
【0124】
スイッチマトリックス2405は、検索エンジンごとの経路の総数(たとえば15経路:GPSのための1+GLONASSのための14)から所望の信号を生成するように構成され得る。一実施形態では、スイッチマトリックス2405は、DEMUX2402およびチャネル選択ミキサ2403の出力を受信し、検索エンジンのための出力SE_00_IN[3:0]〜SE_07_IN[3:0]を選択するように構成され得る。一実施形態では、スイッチマトリックス2405のサイズは15×8であり得、要素ごとに4ビットおよび16MHzである。
【0125】
スイッチマトリックス2406は、I&D2404Aおよび2404Bの出力を受信し、追跡エンジンのための出力CORR_00_IN[5:0]〜CORR_15_IN[5:0]を生成することができる。別の実施形態では、各チャネル選択ミキサが任意のチャネルにプログラムされ得るので、チャネル選択ミキサ2403は追跡エンジンの各々に有線接続され得る。チャネル選択ミキサ、検索エンジン、および追跡チャネルの最終数はハードウェアコストに基づいて変化し得ることに留意されたい。たとえば、一実施形態では、14個のチャネル選択ミキサと16個の追跡エンジンとが使用され得る。
【0126】
図26に、検索エンジン105A(図1)の一部を形成することができる例示的な検索エンジン2600を示す。この実施形態では、検索エンジン2600は積分およびダンプ(I&D)ユニット2601と、ミキサ2603と、量子化器2606と、相関器2607と、ミキサ2609と、コヒーレント積分ブロック2612と、絶対値ブロック2613と、非コヒーレントブロック2614と、(検索エンジン2600の出力を与える)MAXブロック2615とを含むことができ、すべてが直列に結合される。コードNCO2602は、I&D2601と、2つのキャリアNCO2605および2611と、コヒーレント積分ブロック2612と、非コヒーレント積分ブロック2614とに入力を与えることができる。それぞれキャリアNCO2605および2611はそれらの出力をsin/cosテーブル2604および2610に与え、sin/cosテーブル2604および2610はそれらの出力をそれぞれミキサ2603および2609に与える。(図27にさらに詳細に示す)検索エンジン2600によって実行される例示的な動作は、積分/ダンプと、粗キャリア周波数との混合と、2ビット量子化と、基準コードとの混合および相関と、微細キャリア周波数との混合と、(データシフトを含む)コヒーレント積分と、絶対値の計算と、(データシフトを含む)非コヒーレント積分と、最大値の計算とを含む。
【0127】
一実施形態では、相関器2607は、それの記憶されたビットを、コード生成器2608(すなわち、図29および図30に関して以下で説明するGPSコード生成器2608AまたはGLONASSコード生成器2608B)から受信したC/Aコードビットと比較するシフトレジスタ遅延線を使用して実装され得る。コード生成器2608が位相オフセットを受信し(すなわち、以下で説明する、位相セレクタのための、G2生成器のいくつかの出力を選択し)、ならびにNMS(ナビゲーションメッセージシーケンサ)を受信することに留意されたい。一実施形態では、相関器2607は相関結果を1msごとに与えることができ、コヒーレント積分は20ms未満の間実行され得る(さもなければ、コヒーレント積分は、データ信号に関連するビット遷移と干渉することがある)。
【0128】
一実施形態では、NMSは、より高感度の捕捉モードを可能にすることができる。詳細には、データビットのビット境界と極性とが知られているとき、より長いコヒーレント積分が実行され得る。(コヒーレント積分では雑音が経時的に消去するが、非コヒーレント積分では消去しないので)信号対雑音比(SNR)は、コヒーレント積分によって、非コヒーレント積分に比較してより効率的にブーストされることに留意されたい。したがって、積分のために設定された時間を仮定すれば、一般に非コヒーレント積分よりもコヒーレント積分が選好される。したがって、ビット極性が知られている(そして、NMSによって与えられた)場合、コード生成器2608によって出力されたC/Aコードは、2607によって相関する前に、ビットの極性によって変調され得、それにより、コヒーレント積分ブロック2612によってより長いコヒーレント積分が実行されることが可能になる。
【0129】
GLONASSのためのコード周波数はGPSの周波数の半分であるので、GLONASSのための(I&Dブロック2601に関連する)第1の積分およびダンプの出力サンプリングレートは、GPSの出力サンプリングレートの半分であることに留意されたい。たとえば、1/2チップ分解能の場合、出力サンプリングレートは、GPSでは2MHz、GLONASSでは1MHzである。1/4チップ分解能の場合、出力サンプリングレートは、GPSでは4MHz、GLONASSでは2MHzである。
【0130】
信号は、粗ドップラーワイパー(すなわち、ミキサ2603)の後、量子化器2606によって複数ビットから2ビットに量子化され得る。1つの最適化2ビット量子化しきい値は、入力信号の2乗平均(RMS)に等しい。異なる雑音形状がI&Dブロック2601の出力信号サイズを変更し得ることに留意されたい。LPF402およびBPF404(図4)の使用は雑音電力スペクトルを変更し得る。雑音形状を変更することができるDFE_GPS102Aの4つの構成は、ADC208Aが64MHzで動作し、LPF402が使用され、BPF404が使用される構成と、ADC208Aが64MHzで動作し、LPF402が使用され、BPF404がバイパスされる構成と、ADC208Aが32MHzで動作し、LPF402がバイパスされ、BPF404が使用される構成と、ADC208Aが32MHzで動作し、LPF402がバイパスされ、BPF402がバイパスされる構成とである。
【0131】
一方、1/2または1/4I&D動作モードは、I&Dブロック2601の出力サイズのRMSに影響を及ぼし得る。したがって、I&Dブロック2601は4つの動作モードを有することができる、すなわち、GPS1/2チップモードでは、I&Dブロック2601は16MHzから2MHzへの変換(8:1デシメーション)を実行することができ、GPS1/4チップモードでは、I&Dブロック2601は16MHzから4MHzへの変換(4:1デシメーション)を実行することができ、GLO1/2チップモードでは、I&Dブロック2601は16MHzから1MHzへの変換(16:1デシメーション)を実行することができ、GLONASS1/4チップモードでは、I&Dブロック2601は16MHzから2MHzへの変換(8:1デシメーション)を実行することができる。
【0132】
図27に、GPSのための例示的なコード生成器2608A(図26、コード生成器2608の一部を形成するコード生成器2608A)を示す。この実施形態では、コード生成器2608Aは、G1コードを生成するためのG1生成器2701と、G2コードを生成するためのG2生成器2702と、初期化ブロック2903と、位相セレクタ2704と、XGi C/Aコードを生成するための加算器2705とを含む。位相セレクタ2704では、S1およびS2は、各エポックにおいてG2i出力を作成するためにG2生成器2702のシフトレジスタ2712のどのビットが加算されるかを示すことに留意されたい。異なる衛星の場合はS1およびS2が異なることにさらに留意されたい。たとえば、PRN1は、G2iビットを形成するためにシフトレジスタ2712からビット2とビット6とを加算することによって生成され得、PRN2は、G2iビットを形成するためにビット3とビット7とを加算することによって形成され得る。XGi C/Aコードは、以下によって作成され得る。
【0133】
a.初期化ブロック2703を使用して、G1生成器2701とG2生成器2702の両方のシフトレジスタ(2711および2712)にすべて1を装荷すること。
【0134】
b.現在のエポックのための出力ビットを判断するためにすべてのXOR演算から和を計算すること。
【0135】
c.G1生成器2701とG2生成器2702の両方のレジスタを1要素右にシフトすること。G1生成器2701およびG2生成器2702の最左要素に、シフトの直前から適宜に計算されたビットを装荷すること。
【0136】
d.ステップ2に戻ること。
【0137】
GPSのためのC/Aコード系列は、2つのPRN系列G1およびG2の排他的論理和をとることによって組み合わせられる。コード周波数は約1.023MHzである。(図27に示す)一実施形態では、G1とG2とを生成する、LFSRに対応する多項式は次の通りである。
【数16】
【0138】
図28に、GLONASSのための例示的なコード生成器2608B(図26、コード生成器2608の一部を形成するコード生成器2608B)を示す。この実施形態では、コード生成器2608Bは、G1/CAコードを生成するためのG1生成器2801と、G2(アイドル)コードを生成するためのG2生成器2802と、初期化ブロック2803と、位相セレクタ2804とを含む。位相セレクタ2804では、S1およびS2は、各エポックにおいてG2i(アイドル)出力を作成するためにG2生成器2812のシフトレジスタ2802のどのビットが加算されるかを示すことに留意されたい。
【0139】
図28に示すコード生成器2608Bの構成では、C/Aコード系列はG1のみに依存し得、コード周波数は511kHzであり得る。一実施形態では、G1とG2とを生成する、LFSRに対応する多項式は次の通りである。
【数17】
【0140】
GLONASSのためのコード系列は1ms持続時間の511チップである。コード系列は9段最大長シフトレジスタ(MLSR)によって生成され得る。生成多項式G(x)=1+x5+x9であり、すべての初期状態は(初期化ブロック2803を使用して)1に設定される。一実施形態では、コード生成器2608Bは、再構成可能なコード生成器2608Aを使用して実装され得る。
【0141】
図29に、例示的なGLONASSデータ系列生成を示す。ライン2901は期間T=10msのクロックパルスを示し、ライン2902はメアンダ(meander)信号(T=10ms)を示し、ライン2903は相対コードにおけるデータビット(T=20ms)を示し、ライン2904は双バイナリ(bi-binary)コードにおけるデータビット(T=10ms)を示し、ライン2905は時間マークビット(T=10ms)を示す。図29では、各ストリングは、1.7秒のナビゲーションデータと0.3秒の時間マーク系列とからなる。一実施形態では、20ms期間で85データビットが、10msごとに極性を変更するメアンダ系列によって変調され得る。この極性変更は、10msの有効データビット持続時間を生じる。最後の0.3秒は、各ビットが10ms長である、30ビットからなる時間マーク系列である。この場合、時間マークパターンの30ビットは、[111110001101110101000010010110]である。
【0142】
追跡エンジンおよび事前相関雑音推定器
図30に、受信機内の例示的なコードトラッキングループ3000を示す。この実施形態では、トラッキングループ3000は、直角位相相関器ブロック3001と、同相相関器ブロック3002と、コード生成器3003と、弁別器3004と、コードループフィルタ2705と、コードクロック生成器3006とを含む。
【0143】
コード生成器3003は、いくつかの系列パラメータとPRNクロック信号3018とに基づいて、特定の衛星のPRNコード系列に関連するPRNコード系列を局所的に生成するように構成される。コード生成器3003は、関連する衛星信号に関して早い程度から遅い程度までのPRNコード系列の複数の位相シフトバージョンを生成し得る。
【0144】
一実施形態では、コード生成器3003は、PRNコード系列の、非常に早い(VE)3040−2、早い(E)3040−3、プロンプト(P)3040−4、遅い(L)3040−5、および非常に遅い(VL)3040−6位相に対応する、5つのPRN信号3040(3040−2〜3040−6)を生成する。たとえば、非常に早い3040−2信号はプロンプト3040−4信号から0.75チップ時間だけオフセットされ得、対称的に、非常に遅い3040−6信号はプロンプト3040−4信号から0.75チップ時間だけオフセットされ得る。早い信号3040−3はプロンプト信号3040−4に対して時間的に0.25チップ時間だけ早いことがあり、遅い信号3040−4はプロンプト信号3040−4に対して0.25チップ時間だけ遅いことがある。プロンプト信号3040−4のタイミングは、現在のタイミングと、対応する衛星信号のためのコードトラッキングループ2700内の位相推定値とに対応する。
【0145】
同相相関器ブロック3002は、PRN信号3040と、スイッチマトリックス2406から出力された同相成分など、同相信号i(n)3012とを受信する。同相相関器ブロック3002は、同相入力i(n)3012とPRN信号3040とに基づいて同相相関サンプル3014を生成するように構成される。たとえば、同相相関サンプル3014は、同相信号i(n)3012と非常に早いPRN信号3040−2との間の相関関数に対応するIVE(同相、非常に早い)信号を含み得る。
【0146】
直角位相相関器ブロック3001は、PRN信号3040と、スイッチマトリックス2406から出力された直交成分など、直角位相信号q(n)3011とを受信する。直角位相相関器ブロック3001は、直交信号q(n)3011とPRN信号3040とに基づいて直角位相相関サンプル3013を生成するように構成される。
【0147】
直角位相相関サンプル3013および同相相関サンプル3014は、弁別器3004に送信される。これらの相関サンプルを使用して、弁別器3004は、同相入力i(n)3013とプロンプトPRN信号3040−4との間の位相差を検出するように構成される。弁別器3004は、プロンプトPRNコード3040−4の位相が、入力i(n)3013の前方にあるか、それの後方にあるか、またはそれと同じ位置にあるかを示す弁別器出力信号3015を生成する。言い換えれば、弁別器出力信号3015は、コード生成器3003によって局所的に生成されたPRNコード系列と、受信機のアンテナにおいて受信された衛星信号との間の位相差を示す。
【0148】
弁別器出力信号3015とレート補助(rate aiding)信号3016とは、コードクロック制御信号3016を生成するためにコードループフィルタ3005内で組み合わせられる。一実施形態では、レート補助信号3016は、関連する衛星信号から捕捉された粗タイミング信号に対応する。コードループフィルタ3005は、弁別器出力信号3015に対する低域動作を実装するように構成されるべきである。
【0149】
コードクロック3006は、コードクロック制御信号3016に基づいてPRNクロック信号3018を生成する。コードクロック生成器3006と、コード生成器3003と、直角位相相関器ブロック3001と、同相相関器ブロック3002と、弁別器3004と、コードループフィルタ3005とは、同相入力i(n)3012の着信コード系列の位相整合を追跡するように構成された負帰還制御ループを形成する。コードトラッキングループ3000が入力i(n)3012を適切に追跡しているとき、プロンプトPRN信号3040−4上の遷移はi(n)信号3012内の遷移と位相整合される。受信されたPRN系列(同相入力i(n)3012)と局所的に生成されたPRN系列との間の位相差は、弁別器出力信号3015とコードクロック制御信号3016とに反映され、コードクロック制御信号3016は、コードクロック生成器3006とPRNクロック信号3018の得られた位相とを制御する。PRNクロック信号3018の位相は、局所的に生成されたPRN系列の位相を判断する。コードクロック生成器3006は、特定の実装形態要件に従って、周波数調整、位相調整または周波数調整と位相調整の両方を使用してPRNクロック信号3018を調整することによって、コードクロック制御信号3016中に示された位相差を補償し得る。
【0150】
局所的に生成されたPRN系列が、同相の受信されたPRN系列の前方にあるとき、弁別器出力信号3015は正の位相差を示し、それに応じてコードクロック生成器3006にPRNクロック信号3018を調整(周波数を減少、位相シフトを減少)させる。局所的に生成されたPRN系列が、同相の受信されたPRN系列の後方にあるとき、弁別器出力信号3015は負の位相差を示し、それに応じてコードクロック生成器3006にPRNクロック信号3018を調整(周波数を増加、位相シフトを増加)させる。一実施形態では、入力q(n)3011とi(n)3012とはコードトラッキングループ3000内で位相整合されて到着し、ただし、直交信号q(n)3011はADC内のi(n)3012から90度オフセット上でサンプリングされる。受信されたPRNコード系列と局所的に生成されたPRNコード系列との間の位相差の特定のしきい値が、負帰還制御ループにおける適切な位相ロックを劣化させることなしに、通常動作中にいつでも存在し得ることを当業者は認識するであろう。
【0151】
弁別器出力信号3015は、PRNクロック信号3018と同相入力i(n)3012との間の位相誤差推定値を表す。位相誤差推定値は、同相入力i(n)3012の位相と周波数とを追跡するようにコードクロック生成器3006を調整するために使用される。GPSキャリアにおけるドップラーシフトに基づく擬似距離変化率などのキャリア情報は、コードループフィルタ3005の帯域幅を調整するために使用され得、雑音性能と動的性能との間の有益なトレードオフを実装する。キャリア情報はレート補助信号3016を介して搬送され得る。
【0152】
図31に、(図32に関して説明する)追跡エンジン3200と、(図30に関して説明した)コードトラッキングループ3000およびコード生成器3003と、(図41に関して説明する)6タップ生成器4100との間の例示的な関係を示す。図31に示すように、6タップ生成器4100はコード生成器3003中に含まれ、コード生成器3003はコードトラッキングループ3000中に含まれ、コード生成器3003は追跡エンジン3200中に含まれる。これらの構成要素間の特定の結合については、図30、図32、および図41に関して説明してあることに留意されたい。
【0153】
検索エンジン105AによってGPSおよび/またはGLONASS衛星が捕捉された後、追跡エンジン105Bは、連続的リアルタイム位置判断を行うために、見える識別された衛星の各々を追跡することができる。一実施形態では、(追跡エンジン105Bの一部を形成する)GPS追跡エンジンとGLONASS追跡エンジンとは、実質的に同様の構成要素を有し得る。GPS追跡エンジンとGLONASS追跡エンジンとの間の差異については、以下でさらに詳細に説明する。
【0154】
上記のように、GLONASSはCDMAシステムの代わりにFDMAシステムを使用する。ただし、デュアルモードインターフェース104のチャネルミキサにおけるチャネル周波数オフセットは削除され得るので、GPS衛星とGLONASS衛星とを追跡するために同じ入力サンプリングレートとデータビット幅とが使用され得る。GLONASSは、GPSと同じナビゲーションビット持続時間(20ms/ビット)を有するが、これらのナビゲーションビットは10msメアンダ系列でモジュール2変調される。そのメアンダ系列は10msビット遷移をもたらし、これは、ストリング同期が検出される前にFLL(周波数ロックループ)およびDLL(遅延ロックループ)のためのコヒーレント積分時間を限定する。GLONASSは、2倍のC/Aチップ持続時間(約2μs)を有し、GPSよりも大きい数メートルのコード位相誤差をもたらすことにさらに留意されたい。
【0155】
図32に、ハードウェアベースの相関器3210と、ファームウェアベースのGMLアルゴリズム3211とを含む例示的な追跡エンジン3200を示す。この実施形態では、相関器3210は、ミキサ3201と、積分およびダンプ(I&D)ブロック3204と、ミキサ3205と、I&Dブロック3208とを含み、すべてが直列に結合される。コードNCO3203(たとえば32ビット)はそれの出力をコード生成器3202に与えることができ、コード生成器3202は今度はそれの出力をミキサ3201に与える。キャリアNCO3207(たとえば24ビット)はそれの出力をsin/cosテーブル3206に与えることができ、sin/cosテーブル3206はそれの出力をミキサ3205に与える。GML3211の一部であるデポラライザ(depolarizer)3209は、I&Dブロック3208によって出力された結果を復極する(depolarize)ことができる。これらの分極結果は、追跡制御と、DLLと、FLLと、ビット境界判断と、時間マーク判断と、データビット抽出とを行うために(ソフトウェアによって)使用され得る。ソフトウェアは、コード周波数をコードNCO3203に与え、ドップラー周波数をキャリアNCO3207に与えることができることに留意されたい。一実施形態では、相関器3210は、コード生成器3202(たとえば、GPSコード生成器2608A(図29)およびGLONASSコード生成器2608B(図30)を参照)を除いて、GPSでもGLONASSでも同じであり得る。
【0156】
GPS信号は熱雑音中に浸漬される。たとえば、一般的な信号電力は−130dBm未満であるが、(1MHzの帯域幅にわたる)熱雑音は一般に約−110dBmである。信号の相対品質を判断するために雑音電力が測定され得ることに留意されたい。図33に示す一実施形態では、この機能を提供するために、事前相関GPS雑音推定器3301および事前相関GLONASS雑音推定器3302は、相関の前に雑音電力を測定するために使用され得る。事前相関GPS雑音推定器3301(すなわち、追跡エンジン3200の相関器3210の前)がすべてのGPS追跡チャネル(I&D2404Aの出力)によって共有され得ることに留意されたい。対照的に、事前相関GLONASS雑音推定器3302は、マルチプレクサ(図示せず)を用いて入力(I&D2404Bからの出力のうちの1つ)を選択することによって、特定のGLONASSチャネルに同調することができる。
【0157】
一実施形態では、従来の雑音タップベースの雑音推定器が追跡エンジン3200中の追跡チャネル内に保持され得る。すなわち、従来の追跡エンジンは複数のタップを含み、各タップは、入来信号と相関する異なるコード位相のためのものである。データロックループが動作する(それによって、正確なロケーション判断を可能にする)ために、プロンプトタップ、早いタップ、および遅いタップが使用され得る。この構成では、プロンプトタップ値が最高値(電力)である場合、早いタップの数値と遅いタップの数値とが平衡され、追跡は良好として特徴づけられる。一実施形態では、雑音タップはまた、プロンプトタップから数チップ離れて与えられ得る。この雑音タップの値は、無視できるべきであり、信号対雑音比(SNR)を計算するために使用され得る。SNRは、データロックループを調整するために、プロンプト、早い、および遅いタブの数値とともに使用され得る。残念ながら、このSNR計算は、相関の後にくるので、遅く到着し、比較的低速である(msごとにただ1つの測定値を与える)。したがって、安定したデータロックループを与えるために数ミリ秒が必要とされ得る。(GPSおよびGLONASSのための)事前相関雑音推定器3301および3302は、たいていの条件の下で高速のSNR計算を可能にすることができる。
【0158】
雑音タップベース雑音推定器は干渉の影響を相関出力に反映しないので、事前相関雑音推定器3301および3302は、雑音タップベース雑音推定器よりも狭帯域干渉に対して脆弱であり得ることに留意されたい。したがって、上述のように、一実施形態では、従来の雑音タップ雑音推定器はシステム中に保持され得る。この場合、従来の雑音推定器を補完し、性能を向上させるために、事前相関雑音推定器3301および3302が使用され得る。
【0159】
図34に、例示的なGPS事前相関雑音推定器3301を示す。入力信号は、I構成要素とQ構成要素とをもつ8MHz信号であり得る。合計ブロック3402およびダンプブロック3402は、帯域外雑音を削除するために、固定比8:1積分およびダンプ動作を実行することができる。ダンプブロック3402の出力は、絶対値ブロック3403Aおよび3403Bに提供される。絶対値ブロック3403Aおよび3403Bの出力は、加算器3404によって合計され得る。合計ブロック3405およびダンプブロック3406は、帯域外雑音を削除するために、加算器3404の出力に対して積分およびダンプ動作を実行することができる。この実施形態では、ダンプは1msクロックによって駆動され得る。各ダンプにおける累積の数はダンプごとに変動し得る(比率カウント:1)ことに留意されたい。
【0160】
一実施形態では、合計ブロック3405は、各ダンプの正確なカウントを与えるために、カウンタを含むことができる。ダンプブロック3406によって生成されたアキュムレータ出力と同様に、このカウント値は、正確な平均を計算するためにGML3211(図32)にパスされ得る。代替的に、
【数18】
【0161】
の公称値はカウント値を近似することができ、fBBはベースバンド(たとえば16MHz)におけるクロックレートである。GPS雑音推定器3301の出力は、推定雑音電力を計算するために、1msごとにGML3211にパスされ得る。異なるGPS衛星が同じ周波数帯域を占有するので、すべてのGPS追跡チャネルのためにただ1つのGPS雑音推定器3301が必要とされることに留意されたい。
【0162】
図35に、例示的なGLONASS事前相関雑音推定器3302を示す。GLONASS雑音推定器3302は、GPS雑音推定器3301と同じ構成要素を含むが、中間ブロックについて異なるデシメーション比(decimation ratio)とビット幅とを有することに留意されたい。
【0163】
GLONASSはFDMAシステムであるので、(チャネル周波数オフセットを削除した後に)チャネルごとに1つのGLONASS雑音推定器3302が与えられ得る。1つのリソース効率的な実施形態では、GLONASS3302のための1つの事前相関雑音推定器は、すべてのアクティブなGLONASSチャネルとともに使用するために時分割され得る。この実施形態は、雑音電力が安定した測定値であることに依拠する。再び図33を参照すると、MUX3303は、所望のチャネルを選択することができ、信号をそのチャネル上で事前相関雑音推定器3302にパスする。一実施形態では、累積の数をカウントするために、アキュムレータ3405の一部としてカウンタが含まれ得る。積分時間が異なるチャネル間で変動する場合、このカウントは適切な正規化を保証することができる。
【0164】
GPS事前相関雑音推定器3301と、GLONASS事前相関雑音推定器3302と、追跡エンジン105Bとにおける従来のタップの結果は、白色雑音のみが存在する(たとえば、事前相関雑音推定器の結果と従来のタップの結果とが実質的に同じとき)か、干渉物が存在する(たとえば、事前相関雑音推定器の結果と従来のタップの結果とが異なるとき)か、およびどの(1つまたは複数の)衛星が重み付け解除(de-weight)されるべきであるかを判断するために使用され得、または場合によってはロケーション判断のために使用さえされない。一実施形態では、有意な干渉が存在するかどうかを判断するために、2つの雑音測定値の差がしきい値と比較され得る。別の実施形態では、この情報は、対応する衛星が、劣化した品質により、ユーザ位置を判断するために使用されることから除外されるべきであるかどうかを判断する推定信号電力と組み合わせられ得る。
【0165】
図36および図37に、推定雑音電力対事前相関雑音推定器(たとえば、GPS事前相関雑音推定器3301またはGLONASS事前相関雑音推定器3302)のための時間の例示的なシミュレーショングラフを示す。これらのシミュレーションでは、合計800個の観測値が連続的に記録される。図36と図37とを比較することによって示されるように、事前相関雑音推定器は、従来の雑音タップ推定器に比較して著しくより安定した推定値を与えることができる。安定した雑音電力推定を行うことは、GMLが正確なC/N0推定を迅速に取得することを可能にすることができる。
【0166】
柔軟な6タップ生成器
従来の生成器は、各追跡チャネルにおいて4つのタップ、すなわちE(早い)と、P(プロンプト)と、L(遅い)と、N(雑音)とをサポートする。この生成器では、それぞれ、最小タップ間隔は、2、4、および8MHzのシフトレジスタレート(SRR)に対して1/2、1/4、および1/8チップである。改善された追跡エンジンの1つの機能によれば、6タップ生成器が含まれ得る。
【0167】
有利には、マルチパス緩和が可能なダブルデルタ(DD)遅延ロックループがGML中に含まれるとき、6タップ生成器が使用され得る。一実施形態では、第1〜第5のタップ(すなわち、VE(非常に早い)、E(早い)、P(プロンプト)、L(遅い)、およびVL(非常に遅い))は弁別器を形成するために使用され得、第6のタップは雑音タップとして使用され得る。
【0168】
図38に、高度ダブルデルタコード弁別器をサポートする例示的な6タップコード生成器3800を示す。この実施形態では、(コンテキストのために示してある)コードNCO3203がプロンプトタップのための瞬時コード位相をカウントすることができる。それの桁上げ(たとえば1ビット桁上げ)は、(同じくコンテキストのために示してある)CAコード生成器3202を駆動して、9段シフトレジスタ3207中にバッファされたコード系列を生成させる。シフトレジスタ3807における(塗りつぶしパターンで示してある)中央のビットは、プロンプトタップのための現在のコードビット(コードP)を記憶することができる。すべての他のタップのコード系列はプロンプトタップのコードに関して生成される。それらのコード位相(コードN、VE、E、L、およびVL)は、(ソフトウェアによって判断された)プロンプトタップコード位相と相対タップ間隔(RTS)とに基づいて計算され得る。次いで、計算されたコード位相は、適切なチップを出力するためにシフトレジスタ3807における適切なビットを選択するために、アドレスとして使用され得る。従来のタップ生成器はチップサンプルを記憶することに留意されたい。したがって、6タップ生成器3800は、有利には、記憶リソースを最小限に抑えることができる。
【0169】
図39に、32ビット周波数信号を受信し、マルチプレクサ3902への入力を生成する加算器3901を含む例示的なコードNCO3201を示す。マルチプレクサ3902への他の入力は8ビット位相信号である。マルチプレクサ3902は、(NCOを初期化するかまたは増分によってNCOを更新するためにGMLによって生成されたSET信号によって選択された)それの出力を、32ビットNCOレジスタ3903に与えることができる。コードNCO3903の1ビット桁上げ信号は、CAコード生成器3202のクロックを駆動するために使用される。NCOレジスタ3903の出力は、加算器3901ならびに切捨てブロック3803に第2の入力として与えられる。切捨てブロック3803は、コード位相を、(31/32チップ分解能を与える)その5つの最上位ビット(MSB)に切り捨てる。この構成では、シフトレジスタ3807は桁上げ信号によって事実上クロック制御され得、すなわち、コンテンツは、新しいチップが生成されるたびにシフトされ得る。
【0170】
「プロンプト」タップ(すなわち、プロンプト位置3910)におけるチップは、(マルチプレクサ3806Aに0としてインデックス付けされた)レジスタ3807の中心に所与の時間に基準として記憶される。チップのそれの部分コード位相は、32ビットNCOレジスタ3903中に記憶される。任意の他のタップのコード位相は、切捨てブロック3803によって出力されたプロンプトタップコード位相とプロンプトタップまでの相対タップ間隔(RTS)(図39ではRTS:N)とを使用して加算器3801Aによって計算され得る。次いで、計算されたコード位相はフロアブロック3805A(すなわち、フロアブロック3805Aは、加算器3804Aによって生成された和の整数部分だけを使用する)によって切り捨てられ、次いで、切り捨てられた数値は、シフトレジスタ3807から(MUX3806Aを介して)所望のチップを選択するためにアドレスとして使用される。タップ間隔ソリューションが1/32チップであり、最終チップスパンが−4〜4チップであるように、RTS値(N=雑音、VE=非常に早い、E=早い、L=遅い、およびVL=非常に遅い)はs3.5フォーマットであり、Pタップ小数コード位相の上位5ビットはu0.5にフォーマットされる。
【0171】
再び図38を参照すると、複数の加算器3804B〜3804E、フロア3805B〜3805E、およびマルチプレクサ3806B〜3806Eが、加算器3804A、フロア3805A、およびマルチプレクサ3806Aと同様に機能する。したがって、シフトレジスタ3807の各レジスタは異なるチップを保持することができ、それによって、タップ間隔とタップスパンとの間のトレードオフを除去する。
【0172】
8MHz相関分解能を得るために、CAコード生成器3202およびフロアブロック3805A〜3805E(すなわちチップセレクタ)における位相更新が8MHzでも実行され得ることに留意されたい。シフトレジスタ3807、CAコード生成器3202、およびすべてのタップのためのチップインデックス付けは、電力を節約するために、それらの桁上げ信号(たとえば、キャリア信号またはNCO reg3903のオーバーフロー)によって駆動され得る。節電機能とともにより低い相関分解能とともに一実施形態では、CAコード生成器3202およびフロアブロック3805A〜3805Eにおける位相更新は、2または4MHz(すなわち、より低い周波数)でも実行され得る。
【0173】
有利には、上記で説明した共有構成により、ロケーション判断システム100は、GPSのみ、GPSおよびGLONASS(常時オン、固定)、ならびにGPSおよびGLONASS(動的)の3つのモードのうちの1つで動作することができる。一実施形態では、選択されたモードは、現在利用可能な電力に基づくことができる(すなわち、低い電力可用性はGPSのみのモードをトリガすることができるが、高い電力可用性はGPSおよびGLONASS(固定)モードをトリガすることができる)。一実施形態では、(動作周波数のわずかな差による)GPSおよびGLONASSに関連する雑音の差は、GPSのみのモードが選択されるかGPSおよびGLONASSのモードが選択されるかを判断することができる。
【0174】
一実施形態では、GPSおよびGLONASS(動的)モードは、検索エンジン105Aによって識別されたGPS衛星の数に基づいて選択され得る(たとえば、十分なGPS衛星が見えるときはGLONASSがオフにされ得、十分なGPS衛星が見えないときはGLONASSがオンにされ得る)。一実施形態では、十分なGPS衛星が見えるときでも、ロケーション判断をさらに改良するためにGLONASS衛星が使用され得る。すなわち、GPS衛星は、タイミングおよび基本ロケーション情報を与えることが可能であり得る。この情報と、GLONASS衛星のアルマナックと、粗いドップラー周波数とを用いて、1つまたは複数のGLONASS衛星の速い、効率的な捕捉が実行され得、それによって、ロケーション判断の改良を可能にする。
【0175】
ハードウェアレイテンシ較正
GPS受信機およびGLONASS受信機は、アンテナから検索エンジン/追跡エンジンまでのレイテンシを処理することに反応する。レイテンシが一定である場合、影響はクロックオフセットに吸収され得、したがって、PVT(位置、速度、および時間)ソリューションに対して透過的である。ただし、検索エンジンと追跡エンジンとでレイテンシが異なる場合、捕捉と追跡との間の適切なハンドオーバを保証するようにデルタを較正する必要がある。さらに、GLONASSとGPSとでこのレイテンシが異なる場合、システマティックバイアスを除去するようにデルタを較正する必要がある。さらに、異なるハードウェアモードでレイテンシが異なる場合も、無矛盾な1pps生成のためにデルタを較正する必要がある。
【0176】
アナログ回路におけるレイテンシ
SAWフィルタ202は、GPS帯域とGLONASS帯域とで異なる群遅延を有し得る。たとえば、GPSとGLONASSとの間で最高8nsの群遅延デルタが認識されており、様々なGLONASSデバイスにおけるGLONASSチャネル間では最高5nsである。一実施形態では、最悪状況を制限するために定数オフセットが加算され得る。たとえば、変動が−9nsから+3nsまでの間にある場合、定数3nsを加算することは、ワーストケース絶対誤差9nsの代わりに6nsを作成する。別の実施形態では、ルックアップテーブルが、温度変化および/またはプロセスコーナーに基づく群遅延デルタを含むことができる。一実施形態では、較正をいつ実行すべきかを知るために温度センサが使用され得る。別の実施形態では、補正量を調整するために温度センサが使用され得る。
【0177】
LNA201とミキサセット204との群遅延デルタは、非常に小さい、すなわち−0.1ns程度であることに留意されたい。したがって、LNA201またはミキサセット204のいずれに対しても較正は必要とされない。
【0178】
GPSポリフェーズフィルタ205Aの群遅延(すなわち、このフィルタを通過する遅延)は100nsであり得るが、GLONASSポリフェーズフィルタ205Bの群遅延は、帯域中心では80ns、および帯域エッジでは160〜210nsであり得る。したがって、ポリフェーズフィルタ205Aおよび205Bの較正が望ましい。
【0179】
図40に、ポリフェーズフィルタ206Aおよび206Bにおける異なるレイテンシを補償するための、AFE101の例示的な較正構成を示す。一実施形態では、ポリフェーズフィルタ206AはGPS用であり、ポリフェーズフィルタ206BはGLONASS用である。この構成では、ミキサ204は、通常使用中にポリフェーズフィルタ206A、206Bに結合され得る電流電圧コンバータ(I2V205)に結合される。較正構成では、ポリフェーズフィルタ206Aおよび206Bは、それぞれDACのペア4002Aおよび4002Bから入力を受信するように結合され得る。この結合は、マルチプレクサ、トランジスタまたは任意の他の技術的に実現可能な手段によって行われ得る。トーン生成器4001からI入力とQ入力とを受信するDAC4002Aおよび4002Bは、複素トーンを生成し、次いで、複素トーンはポリフェーズフィルタ206Aおよび206Bに注入され得る。一実施形態では、DAC4002Aおよび4002Bは、他のオンチップ回路から(たとえばBluetooth送信機から)「借用」され得る。一実施形態では、較正が起動時に実行され得る。別の実施形態では、(たとえばミリ秒程度の)群遅延に影響を及ぼす有意な温度変化の後にも、較正が実行され得る。
【0180】
ADC208Aおよび208Bはマルチプレクサ4004に結合され得る(DFEへの接続はAGC動作のために残るべきであることに留意されたい)。マルチプレクサ4004はADC208Aの出力と208Bの出力との間で選択し、それの出力を相関器4003に与え、相関器4003は各ADC出力をそれの対応するDAC入力と相関させる。相関値(すなわち遅延較正)は、ソフトウェアに報告され得、次いでソフトウェアによって位相オフセットに変換され得る。このプロセスは、群遅延を計算するために一連の周波数で繰り返され得る。
【0181】
図41に、一体型乗算器/飽和構成要素4101Aおよび4101Bと累積ブロック4102Aおよび4102Bとを含む例示的な相関器4003を示す。X入力は複素テストトーン(Re(X)およびIm(X))であり、Y入力は実ADC出力である。以下を仮定する。
【数19】
【0182】
上式で、Aはテストトーンの大きさであり、BはADC出力における受信信号の大きさであり、ωはテストトーンの周波数であり、tは時間であり、0は受信信号の位相である。
【0183】
次いで、相関のNポイント平均は以下の通りである(ただしN≫1)。
【数20】
【0184】
したがって、位相オフセットは、Θ=−angle(Z)として計算され得る。この時点で、位相の傾きを生じるために一連の周波数が使用され得る。群遅延は、位相の微分を見つけることによって計算され得る。
【0185】
DAC出力範囲は、IFフィルタおよびVGAの最大利得を用いて、ADCにおける出力がフルスケールに達することができるように設計され得る。ADCにおける出力が不十分な利得によりフルレンジでない場合、推定誤差は増加し得る。
【0186】
ポリフェーズフィルタ206Aとポリフェーズフィルタ206Bとは、1つがGLONASS用であり、1つがGPS用であるので、異なることに留意されたい。一実施形態では、相関器4003は、RFビルトインセルフテスト(RBIST)を実行するために、このバリエーションを判断することができる。たとえば、トーン生成器4001は、異なるトーンを生成することができ、相関器4003は、それらの異なるトーン(たとえば、通常の中心から+/−1Hz)に基づいて電力測定を実行することができる。これらのトーンからの電力比較に基づいて、相関器4003は、フィルタオフセットを計算し、次いで、フィルタをリセンタリングするために、フィルタにおけるキャパシタおよびレジスタ値を調整することができる。したがって、相関器4003はまた、製造ばらつきを補償するように構成され得る。
【0187】
デジタル回路におけるレイテンシ
ロケーション判断システムのデジタル回路におけるレイテンシは、特定のデジタル処理チェーン、すなわちGPSまたはGLONASSに依存する。図42に、レイテンシに寄与し得るデュアルモードインターフェース104のDFE_GPS102AおよびGPS使用構成要素のうちの例示的な構成要素を示す(ADC208Aと、検索エンジン105Aと、追跡エンジン105Bとは、コンテキストのために示してある)。図43に、レイテンシに寄与し得るデュアルモードインターフェース104のDFE_GLO102BおよびGLONASS使用構成要素の例示的な構成要素を示す(ADC208Bと、検索エンジン105A、および追跡エンジン105Bは、コンテキストのために示してある)。GPSデジタル処理チェーン対GLONASSデジタル処理チェーンでは、異なる構成要素が与えられるので、これらのチェーンが本質的に異なるレイテンシを有するであろうことに留意されたい。ただし、各々チェーンのレイテンシは決定論的であり、したがって他のチェーンのレイテンシを補償するために使用され得る。
【0188】
レイテンシルックアップテーブル
一実施形態では、各モジュールの処理レイテンシは、決定論的にカウントされ得、ルックアップテーブルに保存され得る。レイテンシは、ADCクロックサイクル数で指定され得る。
【0189】
論理的に、ブロックがバイパスされた場合、それの関連するレイテンシは除去される。一実施形態では、ルックアップテーブルは、RTL設計における各構成要素のすべてのモードおよび/または構成を含むことができ、異なるクロックレートおよび/または温度を考慮に入れることができる。デルタは、捕捉と追跡との間のコード位相、およびGPSとGLONASSとの間のコード位相を較正するために使用され得る。
【0190】
一実施形態では、較正は、ライブGPS信号を使用して実行され得る。この較正は、新しい位置を判断するために、既知の位置とライブGPS信号とを使用する。既知のユーザロケーションと既知の衛星ロケーションとを用いて、衛星からユーザまでの実際の無線信号移動時間が計算され得る。次いで、実際の移動時間と測定された移動時間との間の差はハードウェアレイテンシにマッピングされ得る。
【0191】
異なる衛星のための較正の適用
GPSとGLONASSとの間または異なるGLONASSチャネル間のレイテンシデルタをPVTソリューションのために補償すること、すなわち、LS(最小2乗)または(一連の雑音の多い測定値から線形動的システムの状態を推定する)カルマンフィルタの前にコード位相測定を相応に調整することができる。この調整は、GML、他の測定SW、またはナビゲーションSWにおいて行われ得る。
【0192】
ブランキング
一実施形態では、GPS/GLONASS受信機の入力において強い干渉があるとき、信号は、誤ったAGC測定値、捕捉結果、および追跡結果を生成することを回避するために「ブランキング」され得る。ブランキングをトリガする制御信号は複数のソースによって制御され得る。一実施形態では、ブランキングは、最高4つのソース、たとえば、(1)LNAにおいて飽和が検出されたときにトリガする、GLONASS受信機中のLNAのピーク検出器(内部)、(2)共存するBTシステムの送信インジケータ(内部)、(3)WiFi送信インジケータ(外部、随意)、および(4)セルフォン送信インジケータ(外部、随意)によって制御され得る。
【0193】
一実施形態では、2つの内部制御信号は1つの信号に組み合わせられ得る。たとえば、図44を参照すると、ANDゲート4401はピーク検出器(ピークDet)と第1のイネーブル信号(enl)とを受信することができ、ANDゲート4402は送信インジケータ(BT Tx1)と第2のイネーブル信号とを受信することができる。第1および第2のイネーブル信号enlおよびen2は、それぞれピーク検出器とBT送信機とによってブランキングをトリガすることができる。ANDゲート4401および4402の出力はORゲート4403によって受信され得、ブランクイネーブル(blank_en)信号を与える、ORゲート4403の出力は、ベースバンドチップ上の汎用入出力(GPIO)ピンに接続され得る。
【0194】
一実施形態では、すべての制御信号を統合するために、図44に関して説明する同様の論理を用いて、ブランキングを制御するために、ベースバンドチップ上にWiFiおよびセルフォン送信信号のための2つの他のGPIOピンがあり得る。「blank_en」という用語は、本明細書では、統合ブランキング制御信号全体を指す。
【0195】
任意の時点において、Bluetooth信号はちょうど1MHzの帯域幅を占有するが、中心周波数は最高毎秒1600回変化する(スロット当たり625μs)。マスタデバイスは偶数番号のスロット中に送信し、スレーブデバイスは奇数番号のスロット中に送信する。現在のBluetooth仕様はまた、パケットが複数の連続する(3つまたは5つの)スロットを占有するマルチスロット送信を可能にする。
【0196】
ヘッドセットおよびハンズフリーアプリケーションにおいて使用される最も一般的なBluetoothパケットタイプはHV3である。HV3は6つのスロットごとに反復し、マスタがスロット0において送信し、スレーブがスロット1において送信し、スロット2〜5がアイドルである。送信の実際のエアタイムは、約370μsであり、1スロット未満である。アクティビティは図45に示されている。GPSは、マスタ(たとえばスマートフォン)またはスレーブ(たとえばPND)と共同設置されるので、有効なオンタイムは0.37msであり、オフタイムは3.38msである。
【0197】
対照的に、WiFiはCSMAを使用し、非同期である。パケット長は数十マイクロ秒から数十ミリ秒まで変動する。さらに、送信間のギャップもユーザアクティビティに応じて著しく変動し得る。
【0198】
セルフォン送信に関して、各GSM(登録商標)周波数チャネルは4.615msフレームに分割される。1つのフレームは8つのスロットに分割され、各スロットは577μsである。GSMハンドセットは、基地局に通信するためにスロットのうちの1つを使用する。したがって、オンタイムは0.58msであり、オフタイムは約4.04msである。CDMAセルフォンは連続的に送信する。
【0199】
AGCのブランキング
強い干渉が存在するとき、ICD出力は増加し、AGCに利得を低減させる。干渉が消えたとき、AGCが利得をバックアップするのに時間がかかるので、利得のこの低減は望ましくない。この遅延を回避するために、blank_enが所定の値に等しいとき(たとえば、blank_en=1とき)、AGC動作をフリーズすることができる。
【0200】
GMLは、67msごとに周期的にAGCを実行する。67ms期間ごとに、4つの10ms測定値が取得され得る。AGCは、利得変更を決定する前に、4つの全測定値を累積する。
【0201】
測定中、blank_en=1である場合、対応する結果は無効である。一実施形態では、ICDは、図46に示す回路4600を使用してICD_validビットを生成することができる。回路4600は、blank_en信号を受信するインバータ4601を含む。ANDゲート4602は、反転blank_en信号とレジスタ4603の出力とを受信する。ANDゲート4602の出力はICD_valid信号である。一実施形態では、レジスタは1に初期化される。当該の時間中に、blank_enが1になった場合、ICD_valid信号はレジスタ4603のフィードバックにより0にロックされる。
【0202】
ブランキングを用いた例示的なAGC動作は、以下のステップを含むことができる。第1のステップにおいて、HWはAGC測定の前に1にICD_valid信号を初期化する。第2のステップにおいて、測定中にいつでもblank_en=1である場合、ICD_valid信号は0に設定される。blank_enが0に戻ったときでも、ビットは0のままである。第3のステップにおいて、測定値が完了している後、GMLは結果を検査する。ICD_valid=0である場合、結果は廃棄される。GMLが4つの連続する有効なICD測定値を得ることができない場合、利得変更は行われない。
【0203】
追跡チャネルのブランキング
追跡チャネルの3ビット入力は2の補数フォーマットである。一実施形態では、ブランクイネーブルビット(blank_en)が「1」であるとき、その3ビット入力は、実数0を生成するためにすべて0に設定される。積分中にblank_en=1が生成された場合、対応する追跡結果は無効である。一実施形態では、各追跡チャネルは、blank_enに基づいて有効な追跡ビット(TRK_valid)を設定する(図46を参照)。一実施形態では、動作は以下のステップを含むことができる。
【0204】
第1のステップにおいて、HWは、追跡チャネルを開始する前にTRK_validを1に初期化する。第2のステップにおいて、積分中にいつでもblank_en=1である場合、TRK_validは0に設定される。blank_enが0に戻ったときでも、ビットは0のままである。第3のステップにおいて、コードエポック境界において、追跡結果およびTRK_validビットは、GMLにパスされるためにハードウェア中に保存される。TRK_validは、次のコードエポックの前に1にリセットされ得る。エポックごとにステップ2および3が反復され得る。コードエポックは追跡チャネルのC/Aコード境界であり、TMEエポックではないことに留意されたい。各追跡チャネルは、それ自体の有効ビットを生成すべきである。
【0205】
廃棄されるべきデータユニットは、1ms積分結果であり得るか、またはPDI msの積分結果であり得る。ms間隔が選定された場合、(1つまたは複数の)消失したmsのための測定値が調整されるべきであり、それはより多くのコーディングおよびより多くのCPU使用率である。ただし、この調整は、ブランキングの影響を最小限に抑えることができ、したがってより良好な性能を有するべきである。PDI間隔が選定された場合、PDI間隔は現在のコード構造においてより良く適合するが、ブランキングの影響は最小でない。一実施形態ではPDI間隔が使用される。
【0206】
追跡結果が無効であるとき、追跡ループは巡航する必要がある、すなわちキャリアの周波数およびコードNCOは変化しない。ブランキング期間が長い場合、この期間は信号をドリフトさせ得、信号が戻った後、プルイン(pull-in)が必要であり得る。
【0207】
検索エンジンのブランキング
一実施形態では、検索エンジンへの入力は2ビット(符号、大きさ)フォーマットである。この入力は、積分およびダンプユニットにおいて2の補数に変換され得る。blank_en=1とき、変換された信号はすべて0に設定され、それによって+1ではなく実数0を保証する。
【0208】
捕捉結果は、多くのミリ秒にわたるコヒーレント積分および非コヒーレント積分から累積されるので、ブランキング中にデータを利用することは捕捉を非常に複雑にする。複雑さを効率とトレードオフする様々な手法がある。
【0209】
第1の手法は、ソフトウェアを変更せず、通常通り積分結果を使用することである。ブランキングが信号エネルギーの無視できる部分を取り除くだけであり、検出確率を劣化させなければ、この手法はうまく動作する。しかしながら、ブランキングが積分期間のかなりの部分を占める場合、積分値はしきい値をパスする可能性が低い。さらに、異なる積分値が不均等にブランキングされた場合、異なる積分結果の間にバイアスがあり、それはより高いフォールスアラームにつながり得る。
【0210】
第2の手法は、全積分期間中に単一のACQ_validビットを生成し、ACQ_valid=0である場合、積分結果を廃棄することである。廃棄された検索は後で再試行され得る。この手法は短い積分持続時間および副次的な干渉に対してのみうまく動作し、他の場合、再試行のコストは非常に高く、再試行成功率は非常に低い。
【0211】
第3の手法は、より微細グラニュラリティ(たとえばエポックの1/8)を用いて妥当性を検査し、各積分結果におけるブランキングされた期間のパーセンテージを計算するために有効ビットを累積することである。情報は、それに応じて結果を受け付ける/拒否するためにソフトウェアにパスされ得る。
【0212】
本発明の例示的な実施形態について添付の図を参照しながら本明細書で詳細に説明したが、本発明がそれらの正確な実施形態に限定されないことを理解されたい。
【0213】
たとえば、一実施形態では、GPSとGLONASSとの間のロケーション精度差が考慮に入れられる。すなわち、GLONASSの誤り率はGPSの2倍である。したがって、GLONASSからの信号とGPSからの信号とは別様に重み付けされ得、すなわち、GPS信号はGLONASS信号よりも大きな重みを与えられ、それによってシステム性能を最適化することができる(重み付き最小2乗ソリューション)。
【0214】
本明細書で説明する実施形態は、網羅的なものではなく、本発明を開示した正確な形態に限定するものでもない。したがって、多くの変更形態および変形形態は明らかであろう。たとえば、一実施形態では、上記で説明した追跡エンジンは、専用追跡エンジン、追跡目的のために使用される検索エンジン(たとえば、図1において追跡エンジン105Bを除去し、検索エンジン105Aのみを使用する)、または専用追跡エンジンと追跡を実行する検索エンジンとの組合せで実装され得る。それに応じて、本発明の範囲は、以下の特許請求の範囲およびそれらの等価物によって定義されるものとする。
【技術分野】
【0001】
[関連出願]
本出願は、2010年1月25日に出願された「System And Method For Simultaneously Receiving GPS And GLONASS Signals」と題する米国仮特許出願第61/298,187号の優先権を主張する。
【背景技術】
【0002】
[発明の分野]
本発明は、位置判断を可能にする衛星システムに関し、特に、GPSおよびGLONASS衛星システムの衛星がリアルタイム位置判断を同時に行うことを可能にするシステムおよび方法に関する。
【0003】
[関連技術]
GPS(全地球測位システム:global positioning system)は、米国によって開発され、運営されている無線ベースの衛星システムである。GPSは1995年に完全に動作可能になった。グローバルカバレージを与えるために、GPSは24個から32個の衛星を使用する。最小24個の衛星を仮定すると、6つの軌道の各々に4つの衛星が配置される。6つの軌道平面の昇交点(ascending node)は60度ずつ分離される。この構成では、任意の所与のポイントからいつでも最低6つの衛星が見えるべきである。
【0004】
すべてのGPS衛星は1575MHzで送信し、各信号は、衛星ごとに一意である1023個の「チップ」の高レート擬似ランダム(PRN)系列で符号化されるので、受信機は、異なる衛星からの信号を区別することができる。粗捕捉(CA:coarse acquisition)コードとも呼ばれるこれらのチップは、受信機の検索エンジンが位置判断のために利用可能な衛星を識別することを可能にするために、連続的に反復される。たとえば、GPSは1023チップ/msのチッピングレートを有する。また、見える衛星を判断するために、反復CAコード内の位置を指すCA位相が使用され得る。受信機における誤差補正に応じて、GPSは、1cmから15mの測位精度を与えることができる。
【0005】
GLONASS(全地球航法衛星システム;global navigation satellite system)は、旧ソビエト連邦によって開発され、現在ロシアによって運営されている無線ベースの衛星システムである。2009年現在、GLONASSはグローバルカバレージを有する。このグローバルカバレージを与えるために、GLONASSは24個の衛星を含み、21個の衛星は信号を送信するために使用され得、3つの衛星はスペアとして使用され得る。24個の衛星は3つの軌道に配置され、各軌道は8つの衛星を有する。3つの軌道平面の昇交点は120度ずつ分離される。この構成では、任意の所与のポイントからいつでも最低5つの衛星が見えるべきである。
【0006】
すべてのGLONASS衛星は同じ標準精度(SP:standard precision)信号を送信するが、各衛星は異なる周波数で送信する。詳細には、GLONASSは、1602.0MHzを中心とする15チャネルFDMA(周波数分割多元接続)を使用する。したがって、各衛星は1602MHz+(N×0.5625MHz)で送信し、Nは周波数チャネル番号(N=−7,−6,−5,...5,6)である。GLONASSは511チップ/msのチッピングレートを有する。GLONASSは、5〜10メートル以内の水平方向測位精度と、15メートル以内の垂直方向測位精度とを与えることができる。
【0007】
現在、位置情報を与えるために利用可能であるGLONASS衛星の出現とともに、位置判断のためにGPS信号とGLONASS信号の両方を使用する能力を含むシステムを有することが望ましい。現在のシステムは、信号タイプごとに別個の受信経路を含む。たとえば、2006年10月30日にGradincicらによって出願された(2007年5月3日に公開された)米国公開第2007/0096980号には、複数の独立した信号経路を含み、各信号経路が別個のIFおよびベースバンドダウンコンバータを含む、RF受信機が記載されている。各信号経路は、外部IFフィルタの選択によって特定のIF帯域に同調される。
【0008】
したがって、構成要素を最小限に抑えながら、GPS信号とGLONASS信号の両方のセットが位置判断において使用されることを可能にし、それによって位置精度を改善する、両方の信号を受信するためのシステムおよび方法が必要である。
【発明の概要】
【0009】
GPS信号とGLONASS信号の両方を受信するための受信機が提供される。この受信機は、アナログフロントエンド(AFE;analog front end)と、AFEの出力を受信するためのGPSデジタルフロントエンド(DFE;digital front end)およびGLONASS DFEと、GPS DFEおよびGLONASS DFEの出力を受信するためのデュアルモードインターフェース(DMI;dual mode interface)とを含む。検索エンジンと追跡エンジンとが提供され、各々がDMIの出力を受信する。特に、AFEのいくつかのフロントエンド構成要素が、GPS信号とGLONASS信号の両方を処理するように構成される。
【0010】
GPS信号とGLONASS信号の両方を処理するように構成された例示的なフロントエンド構成要素は、低雑音増幅器(LNA;low noise amplifier)と単一のミキサセット(すなわち単一のI/Qミキサペア)とを含むことができる。好ましい一実施形態では、フロントエンド構成要素は単一の局部発振器(LO;local oscillator)を含むことができる。このLOは静的にまたは動的に調整され得る。
【0011】
AFEは、GPSポリフェーズ(polyphase)フィルタとGLONASSポリフェーズフィルタとを含むことができる。一実施形態では、GPSポリフェーズフィルタおよび/またはGLONASSポリフェーズフィルタのためのLO周波数およびフィルタ中心周波数は(静的にまたは動的に)調整可能であり得る。この構成では、LOは、整数N合成器(integer-N synthesizer)または小数N合成器(fractional-N synthesizer)を用いて実装され得る。別の実施形態では、GPSポリフェーズフィルタおよびGLONASSポリフェーズフィルタの通過帯域は、正の周波数および負の周波数のいずれかであるように(静的にまたは動的に)選択可能であり得る。さらに別の実施形態では、GPSポリフェーズフィルタおよびGLONASSポリフェーズフィルタの各々のためのフィルタ帯域幅は(静的にまたは動的に)調整可能であり得る。一実施形態では、これらのフィルタのポリフェーズ機能を切り替え、それによってポリフェーズフィルタを標準的な中間周波数(IF)フィルタに変換することができる。
【0012】
一実施形態では、LOの周波数はGPS周波数とGLONASS周波数との間に設定され得る。たとえば、好ましい実施形態では、LOの周波数は、GPS IFがGLONASS IFを下回るように設定され得る。一実施形態では、LO周波数は、GPS信号を最適化するために使用され得る。詳細には、LOの周波数がほぼ1581.67MHzであるとき、GPS信号の得られたIF周波数はほぼ6MHzである。ダウンコンバートされたGPS信号は、このIFの周りの有限帯域幅、たとえば4〜8MHzを占有する。概して、ダウンコンバートされた信号スペクトルが1〜6MHzの間の帯域に入る場合、IFはDCオフセットと1/f雑音とを回避するためには十分高いが、フィルタ性能を最大にするためには十分低い。したがって、この構成では、GPSフィルタの最適化は、事実上、GLONASSフィルタに勝る優先度を与えられる。
【0013】
GPS DFEは、低域フィルタ(LPF)とマルチプレクサとを含むことができる。LPFは、AFEの出力信号をフィルタ処理し、デシメートすることができる。マルチプレクサは、AFEの出力信号またはLPFの出力信号のいずれかを選択することができる。一実施形態では、AFEの出力信号が64MHzであるとき、マルチプレクサはLPFの出力を選択することができ、LPFは、32MHz信号を生成する2:1デシメータを含む。GPS DFEはまた、マルチプレクサの出力信号から干渉をフィルタ除去するための帯域通過フィルタを含むことができる。
【0014】
GPS DFEは、マルチプレクサの出力信号から既知のスパー周波数(spur frequency)を消去するための少なくとも1つのスパー推定消去(SEC;spur estimation cancellation)ブロックをさらに含むことができる。各SECブロックは、サンプルに基づいてスパーの位相を生成するための数値制御発振器(NCO)を含むことができ、サンプルはスパー周波数/アナログデジタル変換器(ADC)周波数である。sin/cosテーブルは、NCOによって与えられた位相に基づいて4象限フェーザ(four quadrant phasor)を生成することができる。共役乗算器(conjugate multiplier)は、AFEの4象限フェーザと出力信号の共役とを乗算することができる。合計ブロックは、大きいブロックサイズにわたって共役乗算器の結果を平均化することができる。複素複素乗算器(complex-by-complex multiplier)は、合計ブロックからのダンプ値と4象限フェーザとを乗算することができる。加算器は、SECブロック出力を生成するためにAFEの出力信号と複素複素乗算器の実数結果とを加算することができる。
【0015】
GPS DFEは、サンプルカウントによって正規化されたアキュムレータ機能を実行するためのDC推定および消去ブロックをさらに含むことができる。DECの出力信号は、量子化誤差を低減するために有利には小数ビットを含むことができる。
【0016】
GPS DFEは、中間周波数(IF)信号をベースバンド信号に変換するためのデジタルミキサをさらに含むことができる。デジタルミキサは、有利には、変換後に、最大ドップラー周波数よりも大きい残留周波数オフセットを与えることができる。一実施形態では、デジタルミキサは、1経路入力2経路(I/Q)出力構成を有する。
【0017】
GPS DFEは、デジタルミキサの出力信号を受信する積分およびダンプデシメーション(dump decimation)(ID2)ブロックをさらに含むことができる。一実施形態では、ID2ブロックは、16MHz信号を生成する2:1デシメータを含む。
【0018】
GPS DFEは、ID2ブロックの出力信号を符号ビットと大きさビットとに変換する量子化器ブロックをさらに含むことができる。量子化器は、符号ビットと大きさビットとを、レガシーデバイスに適合する2ビットフォーマットで組み合わせることができる。特に、大きさビットは、GPS DFEの出力における最大電力に対する所望の信号電力と、量子化器の入力における最大電力に対する所望の信号電力とを含むパラメータに基づくしきい値と比較され得る。
【0019】
GLONASS DFEは、既知のスパー周波数を消去するための少なくとも1つのスパー推定消去(SEC)ブロックと、デジタルミキサと、LPFと、量子化器とを含むことができる。一実施形態では、SECブロックと、デジタルミキサと、LPFとは、GPS SECブロックのために与えられるものと実質的に同じであり得る。量子化器ブロックも、しきい値がGLONASS DFEの出力における最大電力に対する所望の信号電力と量子化器の入力における最大電力に対する所望の信号電力とを含むパラメータに基づき得ることを除いて、GPS DFEのための量子化器ブロックと実質的に同じである。
【0020】
この受信機は、有利には、自動利得制御(AGC)ブロックの少なくとも一部分が、GPS信号とGLONASS信号の両方に適用される利得の共通制御を行う、AGCブロックを含むことができる。一実施形態では、利得は低雑音増幅器(LNA)に関連する。AGCを提供することは、GPS信号経路において利得を最適化することと、次いで、GLONASS信号経路において利得を調整することとを含むことができる。詳細には、AFEの場合、AGCを提供することは、GPS固有増幅器と、GLONASS固有増幅器と、共有GPS/GLONASS増幅器とを初期化することを含むことができる。次いで、GPS固有増幅器および共有GPS/GLONASS増幅器の利得が、GPS DFEの出力を使用して補正され得る。GPS AGCロックの後、GLONASS固有増幅器の利得は、GLONASS DFEの出力を使用して補正され得る。一実施形態では、GPS固有増幅器および共有GPS/GLONASS増幅器の利得を補正すること、ならびにGLONASS固有増幅器の利得を補正することは、インターフェースカウンタデバイス(ICD)によって実行され得る。特に、GPS DFEおよびGLONASS DFEの出力は、大きさビットのみがカウントされる量子化出力であり得る。一実施形態では、ICDは、受信機における他の量子化出力を測定することによってデバッグされ得る。
【0021】
この受信機を動作させる方法が、同じ検索エンジンを使用してGPS信号とGLONASS信号とを処理することを含むことができる。特に、検索エンジンは、コヒーレント積分と非コヒーレント積分の両方を実行し、得られた最大出力値を捕捉判断のためのソフトウェアに送ることができる。
【0022】
この受信機は、デュアルモードインターフェースからGPS固有信号を受信するように構成されたGPS事前相関(pre-correlation)雑音推定器と、デュアルモードインターフェースからGLONASS固有信号を受信するように構成されたGLONASS事前相関雑音推定器とをさらに含むことができる。GPS事前相関雑音推定器およびGLONASS推定器は、トレーニングエンジンとは別個であり得ることに留意されたい。GPS事前相関雑音推定器およびGLONASS事前相関雑音推定器の各々は、入来信号のI成分とQ成分の両方の帯域外雑音を削除するための第1の積分およびダンプブロックを含むことができる。絶対値ブロックは、第1の積分およびダンプブロックからの出力の絶対値を与えることができる。加算器は、絶対値ブロックの出力を加算することができる。第2の積分およびダンプブロックは、加算器の出力を処理し、雑音推定値出力を生成することができる。GPS事前相関雑音推定器およびGLONASS事前相関雑音推定器の各々は、各ダンプをカウントするカウンタをさらに含むことができる。GPS事前相関雑音推定器の絶対値ブロックおよび加算器のためのビット幅がGLONASS事前相関雑音推定器の絶対値ブロックおよび加算器のためのビット幅とは異なり得ることに留意されたい。
【0023】
この受信機のためのタップ生成器は、シフトレジスタと、5つのマルチプレクサと、制御回路とを含むことができる。シフトレジスタは、新しいチップが生成されるとシフトするように構成され得る。シフトレジスタの各レジスタは、異なるチップを記憶することができ、中間レジスタはプロンプトコードを与えることができる。シフトレジスタによって記憶されたチップのうちの1つを選択するように構成され得る各マルチプレクサは、雑音(N)コードと、非常に早い(VE)コードと、早い(E)コード、遅い(L)コード、または非常に遅い(VL)コードを出力することができる。制御回路は5つのマルチプレクサを制御することができる。一実施形態では、制御回路は5つの加算器と5つのフロアブロックとを含むことができる。各加算器は、タップN、タップVE、タップE、タップL、またはタップVLのための相対タップ間隔(RTS)と、切捨てコード位相とを加算することができる。各フロアブロックは、5つの加算器によって生成された5つの和のうちの1つを切り捨て、5つのマルチプレクサのうちの1つのための制御信号を生成するように構成され得る。
【0024】
この受信機は、GPS信号とGLONASS信号とのレイテンシが同等になるように受信機におけるフィルタの遅延が補正されるように較正され得る。一実施形態では、補正は、AFEに対して、たとえば表面弾性波(SAW)フィルタにおいて行われ得る。一実施形態では、いつ較正が必要とされるかを判断し、および/または補正量を調整するために、温度センサが使用され得る。フィルタは中間周波数(IF)フィルタを含むことができる。一実施形態では、補正されるべき遅延の差を計算するために、較正信号が使用され得る。補正は、DFEにおいて、たとえばベースバンドフィルタにおいて行われ得る。一実施形態では、補正は、ライブGPS信号を使用して行われ得る。
【0025】
一実施形態では、IFフィルタを較正することは、受信機の先行する構成要素からIFフィルタを切断することを含むことができる。この時点で、IFフィルタへの入力のための複素トーンが生成され得る。複素トーンはIFフィルタによってフィルタ処理され得る。得られたフィルタ処理された信号は、アナログデジタル変換(ADC)を含む、IFフィルタに続く構成要素を通して伝搬され得る。ADCの出力と複素トーンとは相関され得る。次いで、相関に基づいて遅延較正値が生成され得る。この遅延較正値は、IFフィルタを較正するために使用され得る。
【0026】
一実施形態では、受信機のデジタル処理チェーンを較正することは、デジタル処理チェーンの複数のデジタル構成要素のためのルックアップテーブル(LUT)を構築することを含むことができる。LUTは、アナログデジタルクロックサイクルによって測定された各デジタル構成要素のレイテンシを含むことができる。
【0027】
一実施形態では、受信機への入力において強い干渉が検出されると、信号がブランキングされ得る。ブランキングは、受信機中の低雑音増幅器(LNA)のピーク検出器、受信機と共存しているブルートゥースシステムの送信インジケータ、WiFiシステムの送信インジケータ、および/またはセルフォンの送信インジケータによって制御され得る。一実施形態では、ピーク検出器と送信インジケータのうちの少なくとも1つとは、イネーブル/ディセーブル機能を有することができる。ブランキングは、AGCと、追跡チャネルと、検索エンジンとのうちの少なくとも1つに適用され得る。
【0028】
一実施形態では、GPS専用モードと、GPSおよびGLONASS固定モードと、GPSおよびGLONASS動的モードとのうちの1つから動作モードが選択され得る。GPSおよびGLONASS固定モードはGPSおよびGLONASSを常時オンにし、GPSおよびGLONASS動的モードは、GPSとGLONASSとのうちの1つを常時オンにし、他のシステムを所定の条件に基づいてオンにする。
【0029】
一実施形態では、受信機のための非活動化回路が提供され得る。(1)第1のシステム(すなわちGPSまたはGLONASS)からの対応する信号が必要とされないとき、または(2)第2のシステムからの信号のみが正確な位置判断を与えるとき、この非活動化回路は第1のシステムの専用回路を非活動化することができる。この非活動化回路はナビゲーションエンジンによって制御され得る。
【図面の簡単な説明】
【0030】
【図1】GPSとGLONASSの両方のための信号を受信し、復号するための例示的な受信機を示す図。
【図2A】図1の受信機のための例示的なアナログフロントエンドを示す図。
【図2B】図1の受信機のための別の例示的なアナログフロントエンドを示す図。
【図3A】所与のGPS周波数およびGLONASS周波数に対する局部発振器(LO)周波数の様々な位置と、混合後のそれらのLO周波数の影響とを示す図。
【図3B】所与のGPS周波数およびGLONASS周波数に対する局部発振器(LO)周波数の様々な位置と、混合後のそれらのLO周波数の影響とを示す図。
【図3C】所与のGPS周波数およびGLONASS周波数に対する局部発振器(LO)周波数の様々な位置と、混合後のそれらのLO周波数の影響とを示す図。
【図3D】所与のGPS周波数およびGLONASS周波数に対する局部発振器(LO)周波数の様々な位置と、混合後のそれらのLO周波数の影響とを示す図。
【図3E】所与のGPS周波数およびGLONASS周波数に対する局部発振器(LO)周波数の様々な位置と、混合後のそれらのLO周波数の影響とを示す図。
【図3F】所与のGPS周波数およびGLONASS周波数に対する局部発振器(LO)周波数の様々な位置と、混合後のそれらのLO周波数の影響とを示す図。
【図4】GPSのための例示的なデジタルフロントエンド(DFE)を示す図。
【図5】GPS DFEのための例示的な低域フィルタ(LPF)を示す図。
【図6】GPS DFEのための例示的な帯域フィルタ(BPF)を示す図。
【図7】GPS DFEのための例示的なスパー推定および消去(SEC)ブロックを示す図。
【図8】GPS DFEのための別の例示的なSECブロックを示す図。
【図9】GPS DFEのための例示的なDC推定および消去(DEC)ブロックを示す図。
【図10】GPS DFEのための例示的なデジタルミキサ(DM)を示す図。
【図11】GPS DFEのための例示的な積分およびダンプ(I&D)セット(ID2)を示す図。
【図12】GPS DFEのための例示的な2ビット量子化器を示す図。
【図13A】64MHzのADC周波数および6MHzのIF周波数についての例示的なシミュレーション結果を示す図。
【図13B】64MHzのADC周波数および6MHzのIF周波数についての例示的なシミュレーション結果を示す図。
【図13C】64MHzのADC周波数および6MHzのIF周波数についての例示的なシミュレーション結果を示す図。
【図13D】64MHzのADC周波数および6MHzのIF周波数についての例示的なシミュレーション結果を示す図。
【図13E】64MHzのADC周波数および6MHzのIF周波数についての例示的なシミュレーション結果を示す図。
【図13F】64MHzのADC周波数および6MHzのIF周波数についての例示的なシミュレーション結果を示す図。
【図14A】異なる信号電力についてのSE検出確率(Pd(%))対スパー電力レベルを示すプロット。
【図14B】4つの異なる信号電力レベルについてのSE検出確率(Pd(%))対スパー周波数を示すプロット。
【図14C】異なるスパーについてのSE検出確率(Pd(%))対信号電力(信号インジケータ)(dBm)を示すプロット。
【図14D】SE検出確率(PD(%))対スパー周波数誤差(Hz)を示すプロット。
【図15】例示的なGLONASS DFEを示す図。
【図16】GLONASS DFEのための例示的なSECブロックを示す図。
【図17】GLONASS DFEのための例示的なDMを示す図。
【図18】GLONASS DFEのための例示的なLPFを示す図。
【図19】図1に示す受信機の構成要素を制御することができる非活動化回路を示す図。
【図20】複数のチップを含むロケーション判断システムを示す図。
【図21】GPS DFE動作およびGLO DFE動作の例示的なタイミング図。
【図22】例示的なGPS AGC動作を示す図。
【図23】例示的なGLONASS AGC動作を示す図。
【図24】例示的なデュアルモードインターフェース(DMI)を示す図。
【図25】DMIのための例示的なチャネル選択ミキサを示す図。
【図26】例示的な検索エンジンを示す図。
【図27】例示的なGPSコード生成器を示す図。
【図28】例示的なGLONASSコード生成器を示す図。
【図29】例示的なGLONASSデータ系列生成を示す図。
【図30】例示的なコードトラッキングループを示す図。
【図31】コードトラッキングループと追跡エンジンとの間の例示的なインターフェースを示す図。
【図32】例示的な追跡エンジンを示す図。
【図33】事前相関雑音推定器のための例示的な位置を示す図。
【図34】例示的なGPS事前相関雑音推定器を示す図。
【図35】例示的なGLONASS事前相関雑音推定器を示す図。
【図36】事前相関雑音推定器(すなわち、GPS事前相関雑音推定器またはGLONASS事前相関雑音推定器)についての推定雑音電力対時間の例示的なシミュレーショングラフを示す図。
【図37】従来の雑音タップ推定器についての推定雑音電力対時間の例示的なシミュレーショングラフを示す図。
【図38】高度ダブルデルタコード弁別器をサポートする例示的な6タップ生成器を示す図。
【図39】図38に示す6タップ生成器のための例示的なコード数値制御発振器(NCO)を示す図。
【図40】ポリフェーズフィルタにおける異なるレイテンシを補償するための、図2Aに示すAFEの例示的な較正構成を示す図。
【図41】図40に示す較正構成のための例示的な相関器を示す図。
【図42】レイテンシに寄与し得る、デュアルモードインターフェースのGPS DFEおよびGPS使用構成要素のうちの例示的な構成要素を示す図。
【図43】レイテンシに寄与し得る、デュアルモードインターフェースのGLONASS DFEおよびGLONASS使用構成要素のうちの例示的な構成要素を示す図。
【図44】ブランクイネーブル信号を生成するために複数の制御信号を組み合わせるための例示的な回路を示す図。
【図45】Bluetooth(登録商標)において使用される例示的なHV3送信を示す図。
【図46】ブランクイネーブル信号を受信し、ICDイネーブル信号を生成するための例示的な回路を示す図。
【発明を実施するための形態】
【0031】
GPS信号とGLONASS信号の両方を受信することが可能な受信機について説明する。この受信機は、構成要素を共有し、それによって受信機サイズを著しく低減するように有利に構成され得る。この受信機はまた、位置判断において信号の両方のセットが同時に使用されることを有利に可能にし、それによって受信機の位置精度を改善することができる。
【0032】
受信機の概要
図1に、GPSとGLONASSの両方の信号を受信し、復号するための例示的な受信機を示す。一実施形態では、受信機は、2つのチップ(すなわち集積回路)ソリューション、たとえばRFチップ110とベースバンドチップ111とを含むことができる。RFチップ110は、アナログフロントエンド(AFE)101と、GPSのためのデジタルフロントエンド(DFE_GPS)102Aと、GLONASSのためのDFE(DFE_GLO102B)と、マルチプレクサ(MUX)103とを含むことができる。
【0033】
AFE101は、受信されたGPS信号については32MHzまたは64MHzでアナログデジタル変換器(ADC)信号を出力し、受信されたGLONASS信号については64MHzでADC信号を出力する。DFE_GPS102AのDFE出力とDFE_GLO102BのDFE出力とは両方とも16MHzでサンプリングされる。MUX103は、RFチップ110の出力において単一の信号を生成するようにこれらの2つの出力を32MHzに多重化し、それによってチップのピンを節約する。
【0034】
ベースバンドチップ111は、デュアルモードインターフェース104と、複数の検索エンジン105Aと、複数の追跡エンジン105Bとを含むことができる。デュアルモードインターフェース104は、MUX103の出力を受信し、検索エンジン105A用に(たとえば16MHzで)、ならびに追跡エンジン105B用に(たとえば8MHzで)信号を生成することができる。一実施形態では、ベースバンドチップ111は、これらの機能を実行する標準的なチップを用いて実装され得る。
【0035】
アナログフロントエンド
図2Aに、信号(GPSおよび/またはGLONASS)を受信する低雑音増幅器(LNA)201を含む例示的なAFEを示す。表面弾性波(SAW)フィルタ202は、LNA201の出力を受信し、帯域通過フィルタ処理を行うことができる。バッファ203はSAWフィルタ202の出力を受信し、それのバッファされた信号を単一のミキサセット(すなわち単一のI/Qミキサペア)204に与えることができ、セット204のうちの1つのミキサは、局部発振器からcos信号をさらに受信し、セット204のうちの他のミキサは、局部発振器からsin信号をさらに受信する。これらのミキサ出力は、電流電圧ブロック(I2V)205によって電流モードから電圧モードに変換され、次いでポリフェーズフィルタ(PPF)206Aおよび206Bに与えられる。PPF206Aおよび206Bが複素数入力(I/Q)を有し、一般に画像信号を削除し、実数出力(I)を有することに留意されたい。電圧利得増幅器(VGA)207Aおよび207Bは、それぞれPPF206Aおよび206Bの出力を受信する。アナログデジタル変換器(ADC)208Aおよび208B(たとえば2つの8ビットADC)は、それぞれVGA207Aおよび207Bの増幅された出力を受信し、次いで(図2Aにコンテキストのために示してある)DFE−GPS102AおよびDFE_GLO102Bに信号を与える。したがって、上記で説明した構成では、GPSとGLONASSとは、フロントエンド受信機経路、すなわち、LNA201と、SAWフィルタ202と、バッファ203と、ミキサセット204とを共有する。ただし、ミキサセット204の後、GPSとGLONASSとは、異なるPPFと、AGCと、ADCとを使用する。
【0036】
好ましい一実施形態では、単一の局部発振器(LO)220は、ミキサセット204用にcos信号とsin信号の両方を生成するために使用され得る。一実施形態では、LO220のRF周波数は、GPS信号とGLONASS信号とのための所定のIF周波数を取得するために設定され得る。たとえば、図3Aを参照すると、LOのRF周波数302は、1575.42MHzのGPS周波数301と1601.72MHzのGLONASS周波数303との間である1581.67MHzに設定され得る。ミキサセット204の後、得られたGPS IF周波数およびGLO IF周波数は、図3Bに示すように、それぞれ、6.25MHz(312)および20.05MHz(313)である(DC311はコンテキストのために示してある)。
【0037】
図3Cに示す別の実施形態では、LO RF周波数304は1585MHzに設定され得る。この場合、ミキサセット204の後、GPS混合周波数およびGLO混合周波数は、図3Dに示すように、それぞれ10MHz(314)および16MHz(315)である。LO周波数がGLONASS周波数に近づくにつれて、得られたGPS IF周波数とGLONASS IF周波数とがより近接することに留意されたい。
【0038】
図3Eに示すさらに別の実施形態では、LO RF周波数304は、GPS周波数301とGLONASS周波数303との間の中間周波数に設定され得る。この場合、ミキサセット204の後、図3Fに示すように、GPS混合周波数316とGLONASS混合周波数317とは、ほぼ13〜14MHzにおいて重複している。この設定は、GLONASSのための最も低いIF周波数を生じることに留意されたい。
【0039】
特に、LO周波数の設定は、GPSまたはGLONASSのための(たとえばポリフェーズフィルタ206Aおよび206Bのための)フィルタ実装形態に影響を及ぼすことがある。詳細には、LOの周波数をより高く(たとえば、周波数302の代わりに周波数304を使用して)設定することにより、GPSフィルタ(すなわちポリフェーズフィルタ206A)を実装することはより費用のかかる困難なものになり、GLONASSフィルタ(すなわちポリフェーズフィルタ206B)を実装することはより費用のかからないより容易なものになり得る。一方、LO周波数をより低く(たとえば、周波数304の代わりに周波数302を使用して)設定することにより、GPSフィルタを実装することはより費用のかからないより容易なものになり、GLONASSフィルタを実装することはより費用のかかる困難なものになり得る。
【0040】
LO周波数305の場合、ポリフェーズフィルタ206Aおよび206Bは、正または負の周波数に基づいてGPS信号とGLONASS信号とを区別することができることに留意されたい。すなわち、図3Fは、信号が重複しているように見えることを示しているが、GPS信号は実際には負の周波数であり、GLONASS信号は実際には正の周波数である。したがって、ポリフェーズフィルタ206Aおよび206Bは、GPS信号とGLONASS信号とのためのフィルタ帯域幅を調整することができる(GPSについては一点鎖線、GLONASSについては二点鎖線を参照)。ただし、このLO設定は潜在的にI/Q不整合を生じ得、I/Q不整合は別の信号経路への信号結合を生じ得ることに留意されたい。この信号結合は受信機性能を著しく低下させ得る。
【0041】
LO周波数302またはLO周波数304のいずれかを使用することによって、ポリフェーズフィルタ206Aおよび206Bはまた、GPS帯域幅とGLONASS帯域幅とのために有利に調整され得ることに留意されたい(図3Bおよび図3D中で、GPSについては一点鎖線、およびGLONASSについては二点鎖線を参照)。さらに、それらのIF周波数分離はI/Q不整合を軽減し、それによってより良好な受信機性能を保証することができる。ただし、I/Q不整合の存在下でのこのLO設定は、Glonass経路とGPS経路との間の信号結合を生じ得ることに留意されたい。
【0042】
好ましい一実施形態では、LO周波数302は、GPS信号を最適化するために使用される。詳細には、GPS信号の理想的なIF周波数は、DCオフセットと1/f雑音とを回避するためには十分高いが、フィルタ性能を最大にするためには十分低い、ほぼ1〜6MHzの間にある。一実施形態では、ポリフェーズフィルタ106Aの最適化は、ポリフェーズフィルタ106Bに勝る優先度を与えられ得る。たとえば、LO周波数302は低いGPS IF周波数を与えることができ、それにより低コストの、容易に実装されるGPSフィルタが保証されるとともに、GLONASSフィルタを実装するのに費用がかかりすぎたり、実装が困難になることがなくなる。また、図3Bに示すフィルタ帯域幅は明確に別個であり、したがって、図3Dに示すフィルタ帯域幅よりもより良好な受信機性能を与えることができることに留意されたい。
【0043】
一実施形態では、LO周波数とポリフェーズフィルタ中心周波数の両方が調整され得る。この調整は、スパーを回避するため、および/または異なる水晶基準周波数に適応するために有利に使用され得る。この調整機能は、任意の水晶周波数をもつ整数N合成器を用いてLO220を実装することを可能にする。整数N合成器は、単純な実装および最小の位相雑音という利点を有する。一実施形態では、LO周波数およびポリフェーズフィルタ中心周波数の調整は、通常の受信機動作中に動的に実行され得る。
【0044】
別の実施形態では、ポリフェーズフィルタ帯域幅も調整可能であり得る。この帯域幅調整は、受信機性能を最適化するために考慮されるべき干渉除去と感度とのトレードオフを有利に可能にすることができる。たとえば、帯域幅を広くした場合、所望の信号の減衰はほとんどないが、より多くの干渉が可能にされる。一方、帯域幅を狭くした場合、干渉は最小限に抑えられるが、所望の信号は部分的に減衰され得る。このフィルタ帯域幅調整は静的または動的な方法で実行され得る。
【0045】
一実施形態では、ポリフェーズフィルタの各々の通過帯域は正の周波数または負の周波数のいずれかとして選択され得る。たとえば、一実施形態では、GPSポリフェーズフィルタ通過帯域は正の周波数に切り替えられ得る(および、GLONASSポリフェーズフィルタ極性は負の周波数に切り替えられ得る)。そのような切替えは、さもなければGPS信号とGLONASS信号とのうちの1つと干渉するであろうスパーを回避するために使用され得る。この通過帯域選択は静的または動的な方法で実行され得る。
【0046】
フィルタ処理がポリフェーズフィルタ処理によって実行されない場合、たとえば従来のIFフィルタが使用された場合、フィルタ帯域幅は、より広い信号(すなわちGLONASS信号)(一点鎖線のみ)に調整され得ることに留意されたい。従来のIFフィルタ構成はポリフェーズフィルタのIFフィルタ構成よりも単純であろう。さらに、従来のフィルタ構成は、ポリフェーズフィルタに比較して電力を節約することができる。しかしながら、従来のフィルタ構成はまた、I/Q不整合が増加しやすく、したがって、望ましくない信号結合が起こりやすいことがある。さらに、従来のフィルタ構成を使用することによって、ある程度の(たとえば3dB程度の)信号対雑音(SNR)劣化が生じ得る。
【0047】
図2Bに、AFE101’の別の例示的な実施形態を示す。この実施形態では、I2Vブロック205は除去され、ミキサセット204の代わりにミキサセット210Aおよび210Bが使用される。この構成では、各ミキサセットのミキサは、それらのそれぞれのPPFに直接与えられる。ミキサセット210Aおよび210B中の各ミキサには依然としてLO220が与えられ得ることに留意されたい。AFE101’は、AFE101(図2A)よりも良好な線形性および雑音性能を与え得る。しかしながら、AFE101はLNA201の負荷がより低く、これにより潜在的により高い利得を与えることができる。
【0048】
一実施形態では、GPS自動利得制御(AGC)ブロック2006AおよびGLO AGCブロック2006B(オフチップ、コンテキストのために示してある)は、それぞれDFE_GPS102AおよびDFE_GLO102Bから入力を受信することができる。一実施形態では、AGC入力は、DFEからの16MHz複素数(I/Q)2ビットサンプルであり得る。GPS AGC2006Aは、バッファ203、PPF206A、およびVGA207Aの利得を制御する。対照的に、GPS AGC2006Bは、PPF206BおよびVGA207Bの利得を制御する。
【0049】
GPSデジタルフロントエンド(DFE)
従来のGPS受信機は、概して1または2ビットADCを使用しているが、受信GPS信号は、通常、熱雑音フロアを下回るので、それで十分である。たとえば、熱雑音電力は一般的なアナログフィルタでは約−110dBmであるが、GPS信号の受信電力は−130dBm以下である。この場合、ADCによってもたらされる量子化雑音が熱雑音に比較して無視できる限り、全体的な性能は低下しない。
【0050】
上記のように、ADC入力においてGPS信号および熱雑音のみが存在すると仮定している。しかしながら、ADC入力において干渉信号も存在する場合、ひどいクリッピングを回避するために、ADCダイナミックレンジの一部を干渉のために割り振らなければならない。したがって、所望の信号はサイズが小さくなり、熱雑音に対する量子化雑音は増加し、性能は低下する。
【0051】
実際の使用において、周波数スペクトルはすべての種類のRF信号でパックされ、そのうちのいくつかは保護GPS帯域から数十MHzしか離れていない。さらに、チップ中のデジタルクロックのRF漏れまたは高調波はGPS帯域において非常に近接してまたは均等に見え得る。残念ながら、ADC入力において信号を干渉のない状態にすることは、アナログ回路設計において非常にコストがかり、かなりの電力と面積とを消費する。
【0052】
改善されたAFEの1つの実施形態によれば、アナログ設計要件が緩和され得る。詳細には、マルチビットADC(たとえば、図2A、ADC208Aおよび208Bの各々については8ビット実装形態)が使用され得、それによって、一部の干渉が通過することを可能にする。次いで、この干渉はデジタル的に抑制され得る。特に、DFEは、AFEに比較してより小さく、より低電力であるので、この実装形態は商業的に選好される。さらに、集積回路技術はより小さいジオメトリに縮小し続けているので、AFEに比較して、DFEはより良くスケーリングする。
【0053】
概して、DFEは、ADCとベースバンドモジュールの残部との間に位置するものとして特徴づけられ得る。以下で説明するDFEは、1つまたは複数のスパーと、DCオフセットと、ブロッカーとを削除するように構成され得る。一実施形態では、DFEは、複数ビット入力を2ビット出力に低減することができる。特に、コアデジタル回路の面積と電力とが維持され得るように、出力ビット幅は標準的なADCビット数に切り捨てられ得る。
【0054】
図4に、低域フィルタ(LPF)402と、マルチプレクサ(MUX)403と、帯域通過フィルタ(BPF)404と、スパー推定および消去(SEC)ブロック405〜406と、DC推定および消去(DEC)ブロック407と、デジタルミキサ(DM)408と、積分およびダンプデシメーションブロック409と、量子化器410とを含むことができる例示的なDFE_GPS102A(図1)を示す。一実施形態では、BPF404と、SEC405および406と、DEC407と、DM408とは、32MHzと64MHzの両方のADCモードにおいて32MHzで動作することができる。
【0055】
DFE_GPS102Aのこの実施形態では、MUX403は、(コンテキストのために示してある)ADC208Aと(ADC208からそれの入力を受信する)LPF402とから入力を受信することができ、出力を帯域通過フィルタ(BPF)404に与えることができる。ADCサンプル周波数は、エイリアシングを回避するために32または64MHz(2つの動作モード)で動作することができることに留意されたい。
【0056】
ADC208が64MHzで動作するとき、LPF402は25〜27MHzで画像を抑制するために使用され得る。一実施形態では、LPF402中の2:1デシメータがクロックを32MHzに低減することができる。対照的に、ADC208が32MHzで動作するとき、MUX403を使用してLPF402はバイパスされ得る。いずれの場合も、(32MHzで動作する)BPF404は干渉をフィルタ除去することができる。
【0057】
一実施形態では、LPF402は(図5により詳細に示される)固定係数7タップフィルタとして実装され得る。LPF402は、64MHzから32MHzへのデシメーションの前に(IF=5〜7MHzの場合)25〜27MHzで画像を30dBだけ抑制するように構成され得る。
【0058】
図5に、デイジーチェーンにおける複数のレジスタ501(1)〜501(6)と複数の乗算器502(0)〜502(6)とを含む例示的なLPF402を示し、各レジスタへの入力はそれの関連する乗算器にも与えられる(たとえば、ラッチ501(5)への入力は乗算器502(5)にも与えられる)。乗算器502(0)〜502(6)は、それぞれフィルタ係数H(0)〜H(6)をさらに受信する。一実施形態では、フィルタ係数は、固定され、中央タップに関して対称であり得る。乗算は、ビットシフトと加算とによって実装され得る。各タップ(すなわち各ミキサ)の出力は合計ブロック503に与えられ、合計ブロック503は出力504を生成する。2:1デシメーションにより、2つの出力サンプルごとに1つのみを計算すればよいことに留意されたい。デシメーションは、入力においてフィルタ係数を2つのセット(2つの位相)に分割することによって行われ得る。
【0059】
図6に、デイジーチェーンにおける複数のレジスタ601(1)〜601(12)と複数の乗算器602(0)〜602(12)とを含む例示的なBPF404を示し、各レジスタへの入力はそれの関連する乗算器にも与えられる(たとえば、レジスタ601(11)への入力は乗算器602(11)にも与えられる)。乗算器602(0)〜602(11)は、それぞれフィルタ係数H(0)〜H(12)をさらに受信する。乗算は、ビットシフトと加算とによって実装され得る。タップの出力は合計ブロック603に与えられ、合計ブロック603は出力604を生成する。
【0060】
帯域外ブロッカーと雑音とを抑制するように構成されたBPF404は、IF周波数を中心とし、通過帯域と阻止帯域とによって指定され得る。IF周波数は基準水晶に応じて変化し得、通過帯域および阻止帯域は相関ピークおよび干渉除去の必要とされるシャープネスに応じて変化し得るので、フィルタ係数はソフトウェアによって構成され得る。このために、ハードコードされたタップの代わりに汎用乗算器が使用され得る。一実施形態では、帯域外干渉がない場合、BPF404はバイパスされ得る。
【0061】
図7に例示的なSEC405を示す。この実施形態では、SEC405は、スパーがシングルトーンであると仮定し、それの振幅と位相とを推定することを試み、スパーを再構成し、スパーを減算する。位相雑音は、スパーを不鮮明にし、トーンの周りに「スカート」を作成し得るが、シングルトーンを消去した後の残余誤差が無視でき、したがってSEC405によって無視され得ることに留意されたい。帯域内にノッチがあるとき、信号をひずませることなしに狭いノッチフィルタを構築することは極めて困難であるので、このシングルスパー推定/減算は、ノッチフィルタを通して信号をパスするよりも良好に動作することにさらに留意されたい。
【0062】
SEC405において、数値制御発振器(NCO)701は、受信スパー周波数(f_spur_over_f_ADC)を使用してスパーの位相を生成するために使用され得る。一実施形態では、SEC405における最大サンプルレートは32MHzに設定され得る。ターゲット周波数誤差0.01Hz(すなわち、1秒中の位相誤差3.6度)の場合、NCOにおいて32ビットが使用され得る(たとえば、log2(32e6/0.01)−1=31ビットであり、便宜上32ビットに増加させる)。
【0063】
(たとえば、残差−130dBm未満の)完全な消去を得るために、スパー振幅および位相の正確な推定値が必要である。したがって、sin/cosテーブル702の分解能の要件は、このように(当業者に知られており、したがって本明細書では詳細に説明しない)ドップラーワイパーの分解能の要件よりも厳しい。一実施形態では、スパー推定および再構成は、いくつかの小数ビットを使用し得ることに留意されたい。
【0064】
スパー推定のアルゴリズムは以下のように計算され得る。入来信号のスパーは次の通りであると仮定する。
【数1】
【0065】
この値に(共役生成器703によって計算された)スパーフェーザ(spur phasor)の共役を乗算して、以下を得ることができる。
【数2】
【0066】
したがって、乗算器704の出力は次の通りである。
【数3】
【0067】
この結果は、大きいブロックサイズにわたって(アキュムレータ705によって)平均化され(ブロック706において記憶され)得る。一実施形態では、デフォルトサイズはN=4096サンプルであり、最大サイズは218=262144サンプルまたは8msであり得る(ダンプ信号がブロック706にアサートされると、推定値が更新されることに留意されたい)。この平均化中に、第2の期間は逓減し、(固定である)第1の期間はそのままである。以下の式によって生成された得られた複素数値は、スパーの振幅と位相とを表す。
【数4】
【0068】
スパーを消去するために、この複素数値に(乗算器707を使用して)スパーフェーザを乗算することができ、(ブロック708によって記憶された)実数部は以下によって表される。
【数5】
【0069】
この値は再構成されたスパーを表し、(加算器709を使用して)原信号からこの値を減算すると、スパーを事実上消去することができる。
【0070】
この実施形態では、乗算器704は複素複素乗算器であり得る。アキュムレータ705は、最大ブロックサイズをサポートすることができるフォーマットであり得る。乗算器707は、スパー消去のための複素複素乗算器として実装され得る。以下で説明するように、加算器709のフォーマットは、SEC406が使用中かどうかに応じていくつかの符号付き小数ビットを含むことができる。一実施形態では、(図8に関して説明するように)飽和が使用され得る。
【0071】
図4に示す実施形態では、DFE_GPS102Aは2つのSEC(すなわち、SEC405とSEC406と)を含む。SEC405とSEC406とを連結することは、2つの別個のスパーを推定し、消去することを可能にすることができる。図8に、SEC405に関して説明した構成要素に加えて、丸め器ブロック801と、マルチプレクサ802と、飽和ブロック803とをさらに含む例示的なSEC406を示す。この実施形態では、SEC405から受信された信号を(丸めブロック801によって)丸めることができ、スパー推定のための小数ビットを除去することができる。この丸めは、SEC405の場合のように同じ乗算器の再利用を可能にする。特に、小数ビットは第1のスパー周波数におけるエネルギーを表すので、丸めにもかかわらずSEC性能は低下しない。
【0072】
(SEC2イネーブル信号によって判断されるように)SEC405とSEC406の両方が使用された場合、MUX802はそれの出力のために加算器709の出力を選択する。一方、SEC405のみが使用された場合、MUX802はそれの出力のために受信信号を選択する(すなわち、加算器709をバイパスする)。SEC405出力においてフルレンジを保つことは、SEC406において強いスパーが消去されることを可能にし(さもなければクリッピング/ひずみが生じ得る)、SEC405およびSEC406の入力フォーマットを同様にする。SEC406の後、信号サイズは著しく低減され得る。したがって、一実施形態では、飽和ブロック803は、それの出力のために、低減されたビットセットを生成することができる。特に、第2のスパーの推定は、第1のスパーが推定され、消去が開始した後にのみ行われる。したがって、この技法は、推定および消去プロセスの安定性を保証することができる。
【0073】
一実施形態では、スパーが存在しない場合、SEC405と406の両方がマルチプレクサバイパス(図示しないが、図8に示すものと同様)を使用してバイパスされ得る。この場合、MSBは飽和され得、LSBは0でパディングされ得る。
【0074】
スパー推定および消去が有効化された場合、ハードウェアリセットおよび利得変更後に新しい推定が実行され得る。推定/消去は、1信号ブロックを要し、ブロックの直後に利用可能である。推定/消去は、連続的にまたは周期的に動作することができることに留意されたい。周期的に動作する場合、周期は、許容できる累積位相誤差に基づいて判断され得る。たとえば、746msは、32MHzサンプルレートおよび32ビットNCOで終端に向かって約1度の位相誤差を与える。したがって、この場合、消去は連続的に実行されるべきである。一実施形態では、次の推定が利用可能になるまで、直近のスパー振幅と位相推定とが使用され得る。
【0075】
図9に、DC推定および消去を行うことができる例示的なDEC407を示す。この実施形態では、DEC407は、サンプルカウントによって正規化されたアキュムレータ905を含むことができる。DCは、1ブロックのサンプル(デフォルトN=4096、最大サイズは215=32768または1ms)を使用して推定され(ブロック906によって記憶され、ダンプ信号によってトリガされ)、結果はブロックの直後に適用され得る。
【0076】
一実施形態では、量子化誤差を低減するために、小数ビットがブロック平均に保たれ得る。たとえば、8ビットADCの出力中に、非対称コードワード(−128〜127)に起因するシステマティック−0.5*LSBバイアスがあることに留意されたい。ブロッカーのための十分なヘッドルームを残すためにGPS信号が小さいサイズであるとき、この0.5LSBはGPS信号自体に比較して無視できないことがある。この場合、それが削除されない場合、2ビット量子化器(QUAN)410はバイアスされた出力をも生成し、それによって性能に悪影響を及ぼし得る。特に、小数ビットを可能にすることは、有利には、そのような小さいが無視できないDC値を削除するために十分な分解能を与えることができる。
【0077】
BPF404が有効化されると、設計によってDC成分が30dBだけ抑制され得ることに留意されたい。この場合、DEC407はバイパスされ得る。(DECイネーブル信号によって判断されるように)DEC407が使用された場合、MUX908はそれの出力のために加算器907の出力を選択することができる。一方、DEC407がバイパスされるべきである場合、MUX908はそれの出力のために(たとえば、SEC406からの)受信信号を選択することができる。一実施形態では、飽和ブロック909は、MUX908からの出力を受信し、出力を生成することができる。DEC407が使用されたとき、ハードウェアリセットおよび利得変更後に新しい推定が実行され得る。DEC推定は、連続的にまたは周期的に動作することができる。周期的に動作する場合、周期はDCのドリフト特性によって判断されるべきである。一実施形態では、消去は、直近の推定を用いて連続的に動作することができる。DEC407がバイパスされたとき、0小数ビットがパディングされ得ることに留意されたい。
【0078】
図10に、DEC407の出力を受信する2つのミキサ1001Aおよび1001Bを含む例示的なDM408を示す。一実施形態では、DM408は、32MHz(すなわち、AFE101におけるDFE_GPS102A出力サンプリングレートの2倍の速度)で動作することができる。DM408は、IF(f0)を中心とする通過帯域信号をベースバンドに変換することができる。キャリアNCO1003は16ビット幅であり得る。入力周波数のステップサイズは、fstep=32MHz/216=488.28125Hzである。変換後に必要とされる残留周波数オフセットは少なくともΔfであり、ただし、Δfは、通常、最大ドップラー周波数よりも大きいと仮定する。次いで、丸めIF周波数は次のように計算され得る。
【数6】
【0079】
この計算は、残留周波数
【数7】
【0080】
がΔfよりも大きいことを保証する。図10に示すように、DM408は、1経路(I)入力および2経路(I/Q)出力を有する。I経路に
【数8】
【0081】
を乗算することができ、Q経路に
【数9】
【0082】
を乗算することができる。
【0083】
図11に、それぞれ(コンテキストのために示してある)マルチプレクサ1001Aおよび1001Bから入力を受信する2つの積分およびダンプブロック1101Aおよび1102Bを含むことができる例示的なID2 409を示す。一実施形態では、I&Dブロック1101Aおよび1101Bの各々は、信号を32MHzから16MHzにダウンサンプリングするための単純な2:1積分およびダンプデシメーションを使用して実装され得る。信号はすでにベースバンドに混合されているので、BPF阻止は+/−5MHzを越えて30dBであることに留意されたい。したがって、積分およびダンプの前に低域フィルタを必要としない。I&D1101Aおよび1101Bは、各々、それらのそれぞれの、(コンテキストのために示してある)QUAN410の量子化器に2ビットを与えることができる。
【0084】
図12に、それの入力を(符号ブロック1201によって生成された)符号ビットと(大きさブロック1202によって生成された)大きさビットとに変換することができる例示的な2ビット量子化器を示す。符号ビットは、正の場合は「0」、負の場合は「1」に等しい。大きさビットは(コンパレータ1203を使用して)しきい値と比較される。大きさがしきい値以上である場合、コンパレータ1203は「1」を出力する。他の場合、コンパレータ1203は「0」を出力する。一実施形態では、2ビットフォーマット(符号、大きさ)を使用して4つのレベルを表すために(組合せブロック1204を使用して)符号と大きさとが組み合わせられ得、ただし、(2ビットADC出力フォーマットに適合可能であり得る)00=+l、01=+3、10=−1、および11=−3である。量子化しきい値は所望の信号サイズから判断され得る。
【0085】
図13A〜図13Fに、64MHzのADC周波数および6MHzのIF周波数についての例示的なシミュレーション結果を示す。このシミュレーションでは、受信信号中に、IFから0、1、および5MHz離れた、すべて同じ85dBmレベルの3つのスパーがある。図13Aは、ADCの出力における電力スペクトル密度(PSD)を示す第1のプロットである。図13Bは、LPFの出力におけるPSDを示す第2のプロットである。図13Cは、BPFの出力におけるPSDを示す第3のプロットであり、5MHzスパーはBPFによってすでに抑制されている。図13Dは、SECにおけるPSDを示す第4のプロットであり、SECは、キャリアから0および1MHz離れた2つのスパーを推定し、消去するように構成されている。スパーは消去後にほとんど見えないことに留意されたい。再構成されたスパー中の量子化雑音により、はるかに低電力の少数の帯域外スパーが作成される。図13Eは、DM出力におけるPSDを示す第5のプロットである。−6MHzの信号はDCまで回転され、+6MHzの画像は+12MHzまで回転される。図13Fは、DFEの出力におけるPSDを示す第6のプロットであり、ID2および2ビット量子化は行われている。この時点で、信号は32Mspsから16Mspsにダウンサンプリングされている。雑音フロアは量子化により引き上げられる。12MHz(または−4MHz)の周りのバンプは、画像雑音によって生じるが、帯域内信号には影響を及ぼさない。
【0086】
GLOデジタルフロントエンド(DFE)
図15に、19MHzと21MHzの間のIF周波数と、64MHzのADCサンプル周波数とを有する例示的なDFE_GLO102Bを示す。この実施形態では、DFE_GLO102B(図1)は、スパー推定および消去(SEC)ブロック1502〜1503と、デジタルミキサ(DM)1504と、低域フィルタ1505〜1506と、量子化器(QUAN)1507とを含むことができ、すべてが直列に結合される。SEC1502は、(コンテキストのため示してある)ADC208Bの出力を受信することができることに留意されたい。一実施形態では、SEC1502〜1503は必要に応じて独立して有効化/無効化され得、DM1504と、LPF1505〜1506と、QUAN1507とは常に有効化され得る。
【0087】
図16に例示的なSEC1502を示す。SEC1502は、信号ダイナミックレンジを低減するために大きいスパーを削除するように構成され得るが、GPS SECよりも大きい残余スパーを残すことができることに留意されたい。すなわち、GLONASSがFDMAであるので、(より高い残余スパー電力をもつ)不良チャネルはより容易に廃棄され得る。SEC1502および1503の出力においてフルレンジを保つことにより、LPF1505およびLPF1506において強い帯域外スパーおよびブロッカーが抑制されることが可能になる。
【0088】
SEC1502において、数値制御発振器(NCO)1601(たとえば32ビット)は、受信スパー周波数を使用してスパーの位相を生成するために使用され得る。一実施形態では、SEC1502における最大サンプルレートは64MHzに設定され得る。スパー周波数は符号付きであり、サンプル周波数の半分よりも大きくないことに留意されたい。
【0089】
(たとえば、残差−130dBm未満の)完全な消去を得るために、スパー振幅および位相の正確な推定値が必要である。sin/cosテーブル1602の一実施形態では、角度分解能は1象限に対して(pi*2)/512または128レベルであり得、出力ビット幅は8であり得る。sin/cosテーブル1602において4象限をカバーするために符号拡張が使用され得ることに留意されたい。
【0090】
sin/cosテーブル1602を使用してスパー推定のアルゴリズムを計算した後、この数値にスパーフェーザの共役を乗算することができる(共役生成器1603によって共役が実行され、乗算器1604によって乗算が実行される)。乗算器1604の出力は、(アキュムレータ1605によって)平均化され(ブロック1606において記憶され)得る。一実施形態では、デフォルトサイズはN=8192サンプルであり、最大サイズは219=524288サンプルまたは8msであり得る(ダンプ信号がブロック1606にアサートされると、推定値が更新されることに留意されたい)。スパーを消去するために、ブロック1606によって記憶された複素数値に、乗算器1607を使用してスパーフェーザを乗算することができる。(ブロック1608によって与えられた)再構成されたスパーの実数部は、加算器1609を使用して原信号から減算され得る。
【0091】
この実施形態では、乗算器1604はスパー推定のために複素複素乗算器によって実装され得る。アキュムレータ105は、最大ブロックサイズをサポートするフォーマットであり得る。乗算器1607は、スパー消去のための複素複素乗算器によって実装され得る。一実施形態では、飽和(ブロック1610)は、加算器1609の出力を、小数ビットを含む数値から整数ビットのみに丸めるために使用され、それによってダウンストリームDFE_GLOモジュール(たとえばDMおよびLPF)のビット幅を低減することができる。
【0092】
SEC1503は、SEC1502について上記で説明した構成要素と同様の構成における同様の構成要素を使用して実装され得ることに留意されたい。SEC1502とSEC1503とを連結することは、2つの別個のスパーを推定し、消去することを可能にすることができる。SEC1502および1503の両方が有効化された場合、第1のスパーが推定され、消去が開始した後にのみ、スパー推定が行われ、それによって推定および消去プロセスの安定性を保証する。
【0093】
図17に、SEC1503の出力を受信する2つのミキサ1701Aおよび1701Bを含む例示的なDM1504を示す。DM1504は、IF(f0)を中心とする通過帯域信号をベースバンドに変換することができる。一実施形態では、キャリアNCO1703は16ビット幅であり得る。入力周波数のステップサイズは、fstep=64MHz/216=976.5625Hzであり得る。周波数f0は、GLONASS帯域の中間に、すなわちチャネル−1とチャネル0との中間(20.05MHz)に設定され得る。最小のポストDM残余周波数オフセットは300kHzであり得る。デジタルIF周波数は次のように計算され得る。
【数10】
【0094】
丸めによる残余IF周波数は、それぞれミキサ1701Aおよび1701Bのデュアルモードインターフェースにおける出力に基づいて丸めブロック1704Aおよび1704Bによって生成され得る。
【0095】
図17に示すように、入力信号はI経路およびQ経路として複製され得る。I経路に
【数11】
【0096】
を乗算し、Q経路に
【数12】
【0097】
を乗算する。
【0098】
LPF1505および1506は、帯域外(たとえば12〜32MHz)ブロッカーと雑音とを30dBだけ抑制するように構成され得る。図18に、デイジーチェーンにおける複数のレジスタ1801(1)〜1801(6)と複数の乗算器1802(0)〜1802(6)とを含む例示的なLPF1505を示し、各レジスタへの入力はそれの関連する乗算器にも与えられる(たとえば、レジスタ1801(5)への入力は乗算器1802(5)にも与えられる)。乗算器1802(0)〜1802(6)は、それぞれフィルタ係数H(0)〜H(6)をさらに受信する。一実施形態では、フィルタ係数は、固定され、中央タップに関して対称であり得る。乗算は、ビットシフトと加算とによって実装され得る。各タップ(すなわち各ミキサ)の出力は累積ブロック1803に与えられ得、累積ブロック1803は出力1804を生成する。2:1デシメーションにより、2つの出力サンプルごとに1つのみを計算すればよいことに留意されたい。デシメーションは、入力においてフィルタ係数を2つのセット(2つの位相)に分割することによって行われ得る。
【0099】
LPF1506は、32MHzから16MHzへのデシメーションの前に、12MHz〜16MHzで30dBだけさらなるフィルタ処理を行うように構成され得る。一実施形態では、LPF1506はLPF1505と同様の構成を有することができるが、合計ブロック1813の出力は比較的少数のビットを有し得る。LPF2/DECIの後、信号サイズが著しく低減され得、したがって、より少数のビットが出力のために使用され得ることに留意されたい。一実施形態では、ダウンストリーム量子化器の分解能を高めるために、小数ビット(この場合は4つの小数ビット)はLPF1506の出力において保たれ得る。
【0100】
QUAN1507は、GPS QUAN(たとえば、図11および図12)について説明した構成と同様の構成を使用して実装され得る。たとえば、16MHzにおける2つの2ビット量子化器がIチャネルとQチャネルのために使用され得る。一実施形態では、これらの2ビット量子化器は常にオンであり得る。これらの量子化器は、2ビットフォーマット(符号、大きさ)を使用してそれらの入力を4つのレベルに変換することができる。
【0101】
一実施形態では、GLO C/Aコードは27dBの逆拡散利得(de-spreading gain)を与え得る。スパーの逆拡散利得はスパーの周波数に依存する。最大逆拡散利得は、信号からnkHz離れたスパーについて達成され得、ただし、nは整数である。これらのすべてのn kHz周波数オフセットについての逆拡散利得は13.5dBである。
【0102】
非活動化回路
図19に、有利には、図1に示す受信機の構成要素を制御することができる非活動化回路1900を示す。一実施形態では、非活動化回路1900は、DFE_GPS102と、DFE_GLO102Bと、MUX103と、デュアルモードインターフェース104とを制御することができる。非活動化回路1900は、今度は、(ソフトウェアで実装された)ナビゲーションエンジン1901によって制御され得る。一実施形態では、受信機によってGPS信号またはGLONASS信号のうちの1つのみが使用されているとき、非活動化回路1900は、DFE_GPS102A、DFE_GLO102B、および/またはデュアルモードインターフェース104中に設けられたいくつかの専用回路を電源切断することができる。
【0103】
インターフェースカウンタデバイスおよび自動利得制御
図20に、(上記で説明した)RFチップ110と、ベースバンド(BB)チップ111と、GML(GNSS測定レイヤSW)2012とを含むロケーション判断システムを示す。BBチップ111は、(図1に関して説明した構成要素に加えて)デマルチプレクサ2001とインターフェースカウンタデバイス(ICD)2002とを含むことができる。ICD2002は、GPS DFE2経路(I/Q)2ビット出力またはGLO DFE2経路(I/Q)2ビット出力のいずれかをとることができる。
【0104】
GML2012は自動利得制御(AGC)ユニット2006を含むことができ、AGCユニット2006はGPS AGC2006AとGLO AGC2006B(図2Aを参照)とを含むことができる。AGCユニット2006は、電力がターゲットを達成するかまたは利得変更の最大数に達するまで、信号電力を連続的に測定し、測定された信号電力を所望のターゲットサイズと比較し、アナログ利得段を更新することができる。一実施形態では、AGC電力測定ウィンドウサイズは0.25msから32msまでに設定され得る。一実施形態では、GPS AGC2006AおよびGLO AGC2006Bは、2048〜65536の間のブロック長さを使用して、電力測定を16MHzで動作させることができる。
【0105】
ICD2002は、数値(−3、−1、+1、+3)をもつ2ビットデータストリーム中の+/−3の数をカウントし、AGC電力測定のためにその数をGML2012に与えることができる。大きさ=3をもつサンプルの比率が所望のターゲットを達成するまで、AGCユニット2006は利得を調整することができる。(MUX103によって多重化し、DEMUX2001によって多重分離した後の)通常動作では、ICD2002は、GPS AGC動作中にGPS DFE102AのI2Q2出力を、またはGLONASS AGC動作中にGLO DFE102BのI2Q2出力を測定することができる。GPS AGC動作とGLO AGC動作とは同時にでなく直列に行われ得、それによってICD2002がGPSとGLONASSの両方によって共有されることが可能になることに留意されたい。
【0106】
デバッグのために、ICD2002はまた、2ビット量子化器しきい値を較正するために、システムにおける他の2ビット量子化器の出力、たとえば(図24および図25に関して説明する)GLONASSチャネル選択ミキサのI2Q2出力、および検索エンジン105Aにおける粗ドップラーワイパー(図26のミキサ2603参照)のI2Q2出力を測定するように構成され得る。
【0107】
たとえば、図26に示す例示的な検索エンジン2600を参照すると、検索エンジン2600内のモジュールは、粗ドップラーワイパー2603(IR粗ミキサ)出力を2ビットに量子化し得る。DFEおよび検索エンジン動作モードは、雑音電力スペクトル密度、したがって検索エンジン2600におけるI&Dブロック2601の出力信号サイズを変更するので、量子化しきい値はDFEおよび検索エンジン動作モードに依存する。雑音が狭帯域であるほど、サンプルはより相関し、積分およびダンプ(I&D)後の出力は高くなる。I&Dブロック2601における出力が高いほど、IR粗ミキサ2603における出力は高くなり、それによってより高い量子化器しきい値が必要になる。一実施形態では、(入力信号のRMSに等しい)2ビット量子化しきい値の場合、出力サンプルのほぼ33%が+/−3になり得る。したがって、量子化器2606の出力を監視することは、有利には、ハードウェア中でしきい値を最適化することを可能にすることができる。
【0108】
一実施形態では、(図示せず、ICD2002をデバッグするために使用される)4:1マルチプレクサは、(1)DFE_GPS102AのI2Q2出力と、(2)DFE_GLO102BのI2Q2出力と、(3)GLONASSチャネル選択ミキサ2403(12個のミキサのいずれか)のI2Q2出力と、(4)粗ドップラーワイパー出力(たとえば、ミキサ2603)のI2Q2出力とを受信することができる。
【0109】
図21に、GPS DFE動作2101およびGLO DFE動作2106の例示的なタイミング図を示す。一実施形態では、GPS AGC(たとえばGPF AGC2006A)は、GPSとGLONASSとによって共有されるLNA(たとえばLNA201)の利得を制御することができる。GPS AGCのレース状態ならびに性能低化を回避するために、GLONASS AGC電力測定はGPS AGC動作後に行われ得る。たとえば、1つのAGC動作期間2102中にGPS AGC動作2103が実行され得る。生じたGPS AGCロックの後、GPSスパー推定(SE)2105が開始することができる。同時に、GLO DFE動作2106およびGLO AGC動作2107が開始することができる。生じたGLO AGCロックの後、GLO SE動作2109が開始することができる。
【0110】
図22に、例示的なGPS AGC動作2201を示す。過渡期間2202は、スパー推定期間2203とスパー消去期間2204とに先行する。無効なデータを含む過渡期間2202は、ハードウェアリセットまたは利得変更後に発生する。したがって、DFE動作は過渡期間2202の後にのみ行われる。この実施形態では、GPS DFEは、DC推定(および消去)ならびにスパー推定(および消去)の両方を含むことができる。スパーがDCに近いときに問題であり得る、スパー推定からDC推定への干渉を回避するために、DC推定期間2205はスパー推定期間2203後に発生する。DC消去期間2206はDC推定期間2205の後にくる。したがって、サンプルの第1のブロック2210はスパー推定のために使用され得、サンプルの第2のブロック2211は、スパー消去を有し、DC推定のための使用され得、サンプルの第3のブロック2212(および、サンプルのすべての後続のブロック)は、スパーとDCの両方の消去を有し、AGC電力測定期間2207中に使用され得る。図22には、簡単のために、1つのスパー推定期間2203とスパー消去期間2204とを示してあることに留意されたい。したがって、両方のSECユニットが使用されたとき、第2のスパー推定期間は、第1のスパー推定期間2203に後続し、DC推定および消去期間は第2のスパー推定期間の後(すなわち第2のスパー消去期間中)にのみ開始する。
【0111】
図23に、例示的なGLONASS AGC動作2301を示す。過渡(無効なデータ)期間2302は、スパー推定期間2303とスパー消去期間2304とに先行する。GLONASS DFEがDC推定または消去を有しないことに留意されたい。したがって、(スパー推定が有効化されていると仮定すると)スパー推定期間2303が完了した後、GLONASS AGC電力測定期間が発生し得る。このタイミングは、有利には、AGC電力測定とのスパー干渉を防ぐことができる。
【0112】
一実施形態では、GPSおよびGLONASSのためのスパー推定ならびにGPSのためのDC推定が、ハードウェアリセットの後、毎回のAGC電力測定の前に実行され得る。その後、所定の数のブロックの後にスパーおよびDC推定が周期的に反復され得る。一実施形態では、所定のブロック数が0に設定された場合、推定は1回しか実行されず、反復されない。期間が1である場合、推定はブロックごとに、または連続的に行われる。
【0113】
GPSおよびGLONASS AGC動作は周期的に実行され得る。一実施形態では、これらの動作は、各後続のAGC動作期間中に反復され得る。たとえば、再び図21を参照すると、後続のAGC期間2108中に、GPS AGC動作2104は、GLONASS AGC動作2109に先行することができる(他の動作は簡単のために図示せず)。そのときスパーまたはDC推定が進行中である場合、スパーまたはDC推定器がリセットされ得、新しい推定を開始することができることに留意されたい。
【0114】
デュアルモードインターフェース
再び図1を参照すると、デュアルモードインターフェース(DMI)104は、処理されたDFE出力信号を検索エンジン105Aと追跡エンジン105Bとに与えることができる。図24に、デマルチプレクサ(DEMUX)2402と、チャネル選択ミキサ2403と、2つの積分およびダンプ(I&D)ユニット2404Aおよび2404Bと、第1のスイッチマトリックス2405と、第2のスイッチマトリックス2406とを含む例示的なDMI104を示す。(コンテキストのために示してある)MUX103は、RFチップ110の出力において2つの16MHz GPS信号とGLO信号とを一緒に多重化する(図1を参照)。したがって、DEMUX2402は、ベースバンドチップ111の入力において2つの信号を分離することができる。
【0115】
GLONASSは、14チャネルをサポートするFDMAシステムである。(たとえば、DCにおいてまたは実質的にDCにおいて)GLONASS信号をベースバンドにダウンコンバートするために、チャネル選択ミキサ2403が使用され得る。それらの14チャネルの中心周波数は次の通りである。
【数13】
【0116】
上式で、kは−7、−6、−5、...、5、6である。
【0117】
GLONASSチャネル間隔は562.5kHzである。一実施形態では、局部発振器(LO)周波数は1581.67Hzであり、DMI周波数は20.05MHzである。したがって、チャネル選択ミキサ2403の各々の前の入力周波数は次の通りである。
【数14】
【0118】
上式で、kは−7、−6、−5、...、5、6である。
【0119】
図25に、ほぼ250Hzの分解能を与えるために便宜上16ビットのキャリアNCO2503を使用する例示的なチャネル選択ミキサ2403Aを示す。プログラムされたチャネル周波数は次のように計算され得る。
【数15】
【0120】
上式で、f_inはチャネル選択ミキサ2403のための入力サンプリングレート(たとえば、約16MHz)である。
【0121】
乗算器2501は、I/Q信号に5ビットを乗算し、その積を量子化器(QUAN)2504に与える。図12に例示的なQUAN2504のための構成を示す。この実施形態では、電力判断のために大きさビットのみがカウントされることに留意されたい。すなわち、従来の電力判断では、符号と大きさの両方が2乗され、累積される。GLONASSでは3つのレベルのみが可能なので、このプロセスは、有利には、大きさビットだけをカウントし、この情報を乗算器2501に与えることによって簡略化され得る。
【0122】
一実施形態では、第1の(すなわち符号)ビットは、正の場合は「0」に等しく、負の場合は「1」に等しい。第2のビットである大きさは、QUAN2504においてしきい値と比較され得る。大きさがしきい値よりも大きい場合、出力は「1」である。他の場合、出力は「0」である。2ビットフォーマット(符号、大きさ)を使用して4つのレベルを表すために、符号と大きさとを一緒に組み合わせることができ、ただし、00=+l、01=+3、10=−1、および11=−3である。一実施形態では、QUAN2504の最適なしきい値は29である。このしきい値は、制御レジスタを介してプログラム可能であり得る。
【0123】
積分およびダンプ(I&D)ブロック2404Aおよび2404Bは、DEMUX2402およびチャネル選択ミキサ2403の出力に対して16MHzから8MHzへのデシメーションを実行する2ビット入力および3ビット出力モジュールとして実装され得る。一実施形態では、GPSのための1つのI&Dブロック2404Aと、GLONASSのための14個のI&Dブロック2404B(すなわち、チャネル選択ミキサごとに1つのI&Dブロック)とがある。GLONASSは、チッピングレート1023チップ/msのGPSよりも低いチッピングレート、すなわち511チップ/msを有することに留意されたい。したがって、一実施形態では、I&D2404AはI&D2404Bと異なるダンプ時間を有し得る。別の実施形態では、I&D2404AとI&D2404Bの両方は固定比2:1、たとえば、入力16MHz、出力8MHzを有し得る。一実施形態では、ダンプ時間はプログラム可能であり得、ソフトウェアによって判断され得る。
【0124】
スイッチマトリックス2405は、検索エンジンごとの経路の総数(たとえば15経路:GPSのための1+GLONASSのための14)から所望の信号を生成するように構成され得る。一実施形態では、スイッチマトリックス2405は、DEMUX2402およびチャネル選択ミキサ2403の出力を受信し、検索エンジンのための出力SE_00_IN[3:0]〜SE_07_IN[3:0]を選択するように構成され得る。一実施形態では、スイッチマトリックス2405のサイズは15×8であり得、要素ごとに4ビットおよび16MHzである。
【0125】
スイッチマトリックス2406は、I&D2404Aおよび2404Bの出力を受信し、追跡エンジンのための出力CORR_00_IN[5:0]〜CORR_15_IN[5:0]を生成することができる。別の実施形態では、各チャネル選択ミキサが任意のチャネルにプログラムされ得るので、チャネル選択ミキサ2403は追跡エンジンの各々に有線接続され得る。チャネル選択ミキサ、検索エンジン、および追跡チャネルの最終数はハードウェアコストに基づいて変化し得ることに留意されたい。たとえば、一実施形態では、14個のチャネル選択ミキサと16個の追跡エンジンとが使用され得る。
【0126】
図26に、検索エンジン105A(図1)の一部を形成することができる例示的な検索エンジン2600を示す。この実施形態では、検索エンジン2600は積分およびダンプ(I&D)ユニット2601と、ミキサ2603と、量子化器2606と、相関器2607と、ミキサ2609と、コヒーレント積分ブロック2612と、絶対値ブロック2613と、非コヒーレントブロック2614と、(検索エンジン2600の出力を与える)MAXブロック2615とを含むことができ、すべてが直列に結合される。コードNCO2602は、I&D2601と、2つのキャリアNCO2605および2611と、コヒーレント積分ブロック2612と、非コヒーレント積分ブロック2614とに入力を与えることができる。それぞれキャリアNCO2605および2611はそれらの出力をsin/cosテーブル2604および2610に与え、sin/cosテーブル2604および2610はそれらの出力をそれぞれミキサ2603および2609に与える。(図27にさらに詳細に示す)検索エンジン2600によって実行される例示的な動作は、積分/ダンプと、粗キャリア周波数との混合と、2ビット量子化と、基準コードとの混合および相関と、微細キャリア周波数との混合と、(データシフトを含む)コヒーレント積分と、絶対値の計算と、(データシフトを含む)非コヒーレント積分と、最大値の計算とを含む。
【0127】
一実施形態では、相関器2607は、それの記憶されたビットを、コード生成器2608(すなわち、図29および図30に関して以下で説明するGPSコード生成器2608AまたはGLONASSコード生成器2608B)から受信したC/Aコードビットと比較するシフトレジスタ遅延線を使用して実装され得る。コード生成器2608が位相オフセットを受信し(すなわち、以下で説明する、位相セレクタのための、G2生成器のいくつかの出力を選択し)、ならびにNMS(ナビゲーションメッセージシーケンサ)を受信することに留意されたい。一実施形態では、相関器2607は相関結果を1msごとに与えることができ、コヒーレント積分は20ms未満の間実行され得る(さもなければ、コヒーレント積分は、データ信号に関連するビット遷移と干渉することがある)。
【0128】
一実施形態では、NMSは、より高感度の捕捉モードを可能にすることができる。詳細には、データビットのビット境界と極性とが知られているとき、より長いコヒーレント積分が実行され得る。(コヒーレント積分では雑音が経時的に消去するが、非コヒーレント積分では消去しないので)信号対雑音比(SNR)は、コヒーレント積分によって、非コヒーレント積分に比較してより効率的にブーストされることに留意されたい。したがって、積分のために設定された時間を仮定すれば、一般に非コヒーレント積分よりもコヒーレント積分が選好される。したがって、ビット極性が知られている(そして、NMSによって与えられた)場合、コード生成器2608によって出力されたC/Aコードは、2607によって相関する前に、ビットの極性によって変調され得、それにより、コヒーレント積分ブロック2612によってより長いコヒーレント積分が実行されることが可能になる。
【0129】
GLONASSのためのコード周波数はGPSの周波数の半分であるので、GLONASSのための(I&Dブロック2601に関連する)第1の積分およびダンプの出力サンプリングレートは、GPSの出力サンプリングレートの半分であることに留意されたい。たとえば、1/2チップ分解能の場合、出力サンプリングレートは、GPSでは2MHz、GLONASSでは1MHzである。1/4チップ分解能の場合、出力サンプリングレートは、GPSでは4MHz、GLONASSでは2MHzである。
【0130】
信号は、粗ドップラーワイパー(すなわち、ミキサ2603)の後、量子化器2606によって複数ビットから2ビットに量子化され得る。1つの最適化2ビット量子化しきい値は、入力信号の2乗平均(RMS)に等しい。異なる雑音形状がI&Dブロック2601の出力信号サイズを変更し得ることに留意されたい。LPF402およびBPF404(図4)の使用は雑音電力スペクトルを変更し得る。雑音形状を変更することができるDFE_GPS102Aの4つの構成は、ADC208Aが64MHzで動作し、LPF402が使用され、BPF404が使用される構成と、ADC208Aが64MHzで動作し、LPF402が使用され、BPF404がバイパスされる構成と、ADC208Aが32MHzで動作し、LPF402がバイパスされ、BPF404が使用される構成と、ADC208Aが32MHzで動作し、LPF402がバイパスされ、BPF402がバイパスされる構成とである。
【0131】
一方、1/2または1/4I&D動作モードは、I&Dブロック2601の出力サイズのRMSに影響を及ぼし得る。したがって、I&Dブロック2601は4つの動作モードを有することができる、すなわち、GPS1/2チップモードでは、I&Dブロック2601は16MHzから2MHzへの変換(8:1デシメーション)を実行することができ、GPS1/4チップモードでは、I&Dブロック2601は16MHzから4MHzへの変換(4:1デシメーション)を実行することができ、GLO1/2チップモードでは、I&Dブロック2601は16MHzから1MHzへの変換(16:1デシメーション)を実行することができ、GLONASS1/4チップモードでは、I&Dブロック2601は16MHzから2MHzへの変換(8:1デシメーション)を実行することができる。
【0132】
図27に、GPSのための例示的なコード生成器2608A(図26、コード生成器2608の一部を形成するコード生成器2608A)を示す。この実施形態では、コード生成器2608Aは、G1コードを生成するためのG1生成器2701と、G2コードを生成するためのG2生成器2702と、初期化ブロック2903と、位相セレクタ2704と、XGi C/Aコードを生成するための加算器2705とを含む。位相セレクタ2704では、S1およびS2は、各エポックにおいてG2i出力を作成するためにG2生成器2702のシフトレジスタ2712のどのビットが加算されるかを示すことに留意されたい。異なる衛星の場合はS1およびS2が異なることにさらに留意されたい。たとえば、PRN1は、G2iビットを形成するためにシフトレジスタ2712からビット2とビット6とを加算することによって生成され得、PRN2は、G2iビットを形成するためにビット3とビット7とを加算することによって形成され得る。XGi C/Aコードは、以下によって作成され得る。
【0133】
a.初期化ブロック2703を使用して、G1生成器2701とG2生成器2702の両方のシフトレジスタ(2711および2712)にすべて1を装荷すること。
【0134】
b.現在のエポックのための出力ビットを判断するためにすべてのXOR演算から和を計算すること。
【0135】
c.G1生成器2701とG2生成器2702の両方のレジスタを1要素右にシフトすること。G1生成器2701およびG2生成器2702の最左要素に、シフトの直前から適宜に計算されたビットを装荷すること。
【0136】
d.ステップ2に戻ること。
【0137】
GPSのためのC/Aコード系列は、2つのPRN系列G1およびG2の排他的論理和をとることによって組み合わせられる。コード周波数は約1.023MHzである。(図27に示す)一実施形態では、G1とG2とを生成する、LFSRに対応する多項式は次の通りである。
【数16】
【0138】
図28に、GLONASSのための例示的なコード生成器2608B(図26、コード生成器2608の一部を形成するコード生成器2608B)を示す。この実施形態では、コード生成器2608Bは、G1/CAコードを生成するためのG1生成器2801と、G2(アイドル)コードを生成するためのG2生成器2802と、初期化ブロック2803と、位相セレクタ2804とを含む。位相セレクタ2804では、S1およびS2は、各エポックにおいてG2i(アイドル)出力を作成するためにG2生成器2812のシフトレジスタ2802のどのビットが加算されるかを示すことに留意されたい。
【0139】
図28に示すコード生成器2608Bの構成では、C/Aコード系列はG1のみに依存し得、コード周波数は511kHzであり得る。一実施形態では、G1とG2とを生成する、LFSRに対応する多項式は次の通りである。
【数17】
【0140】
GLONASSのためのコード系列は1ms持続時間の511チップである。コード系列は9段最大長シフトレジスタ(MLSR)によって生成され得る。生成多項式G(x)=1+x5+x9であり、すべての初期状態は(初期化ブロック2803を使用して)1に設定される。一実施形態では、コード生成器2608Bは、再構成可能なコード生成器2608Aを使用して実装され得る。
【0141】
図29に、例示的なGLONASSデータ系列生成を示す。ライン2901は期間T=10msのクロックパルスを示し、ライン2902はメアンダ(meander)信号(T=10ms)を示し、ライン2903は相対コードにおけるデータビット(T=20ms)を示し、ライン2904は双バイナリ(bi-binary)コードにおけるデータビット(T=10ms)を示し、ライン2905は時間マークビット(T=10ms)を示す。図29では、各ストリングは、1.7秒のナビゲーションデータと0.3秒の時間マーク系列とからなる。一実施形態では、20ms期間で85データビットが、10msごとに極性を変更するメアンダ系列によって変調され得る。この極性変更は、10msの有効データビット持続時間を生じる。最後の0.3秒は、各ビットが10ms長である、30ビットからなる時間マーク系列である。この場合、時間マークパターンの30ビットは、[111110001101110101000010010110]である。
【0142】
追跡エンジンおよび事前相関雑音推定器
図30に、受信機内の例示的なコードトラッキングループ3000を示す。この実施形態では、トラッキングループ3000は、直角位相相関器ブロック3001と、同相相関器ブロック3002と、コード生成器3003と、弁別器3004と、コードループフィルタ2705と、コードクロック生成器3006とを含む。
【0143】
コード生成器3003は、いくつかの系列パラメータとPRNクロック信号3018とに基づいて、特定の衛星のPRNコード系列に関連するPRNコード系列を局所的に生成するように構成される。コード生成器3003は、関連する衛星信号に関して早い程度から遅い程度までのPRNコード系列の複数の位相シフトバージョンを生成し得る。
【0144】
一実施形態では、コード生成器3003は、PRNコード系列の、非常に早い(VE)3040−2、早い(E)3040−3、プロンプト(P)3040−4、遅い(L)3040−5、および非常に遅い(VL)3040−6位相に対応する、5つのPRN信号3040(3040−2〜3040−6)を生成する。たとえば、非常に早い3040−2信号はプロンプト3040−4信号から0.75チップ時間だけオフセットされ得、対称的に、非常に遅い3040−6信号はプロンプト3040−4信号から0.75チップ時間だけオフセットされ得る。早い信号3040−3はプロンプト信号3040−4に対して時間的に0.25チップ時間だけ早いことがあり、遅い信号3040−4はプロンプト信号3040−4に対して0.25チップ時間だけ遅いことがある。プロンプト信号3040−4のタイミングは、現在のタイミングと、対応する衛星信号のためのコードトラッキングループ2700内の位相推定値とに対応する。
【0145】
同相相関器ブロック3002は、PRN信号3040と、スイッチマトリックス2406から出力された同相成分など、同相信号i(n)3012とを受信する。同相相関器ブロック3002は、同相入力i(n)3012とPRN信号3040とに基づいて同相相関サンプル3014を生成するように構成される。たとえば、同相相関サンプル3014は、同相信号i(n)3012と非常に早いPRN信号3040−2との間の相関関数に対応するIVE(同相、非常に早い)信号を含み得る。
【0146】
直角位相相関器ブロック3001は、PRN信号3040と、スイッチマトリックス2406から出力された直交成分など、直角位相信号q(n)3011とを受信する。直角位相相関器ブロック3001は、直交信号q(n)3011とPRN信号3040とに基づいて直角位相相関サンプル3013を生成するように構成される。
【0147】
直角位相相関サンプル3013および同相相関サンプル3014は、弁別器3004に送信される。これらの相関サンプルを使用して、弁別器3004は、同相入力i(n)3013とプロンプトPRN信号3040−4との間の位相差を検出するように構成される。弁別器3004は、プロンプトPRNコード3040−4の位相が、入力i(n)3013の前方にあるか、それの後方にあるか、またはそれと同じ位置にあるかを示す弁別器出力信号3015を生成する。言い換えれば、弁別器出力信号3015は、コード生成器3003によって局所的に生成されたPRNコード系列と、受信機のアンテナにおいて受信された衛星信号との間の位相差を示す。
【0148】
弁別器出力信号3015とレート補助(rate aiding)信号3016とは、コードクロック制御信号3016を生成するためにコードループフィルタ3005内で組み合わせられる。一実施形態では、レート補助信号3016は、関連する衛星信号から捕捉された粗タイミング信号に対応する。コードループフィルタ3005は、弁別器出力信号3015に対する低域動作を実装するように構成されるべきである。
【0149】
コードクロック3006は、コードクロック制御信号3016に基づいてPRNクロック信号3018を生成する。コードクロック生成器3006と、コード生成器3003と、直角位相相関器ブロック3001と、同相相関器ブロック3002と、弁別器3004と、コードループフィルタ3005とは、同相入力i(n)3012の着信コード系列の位相整合を追跡するように構成された負帰還制御ループを形成する。コードトラッキングループ3000が入力i(n)3012を適切に追跡しているとき、プロンプトPRN信号3040−4上の遷移はi(n)信号3012内の遷移と位相整合される。受信されたPRN系列(同相入力i(n)3012)と局所的に生成されたPRN系列との間の位相差は、弁別器出力信号3015とコードクロック制御信号3016とに反映され、コードクロック制御信号3016は、コードクロック生成器3006とPRNクロック信号3018の得られた位相とを制御する。PRNクロック信号3018の位相は、局所的に生成されたPRN系列の位相を判断する。コードクロック生成器3006は、特定の実装形態要件に従って、周波数調整、位相調整または周波数調整と位相調整の両方を使用してPRNクロック信号3018を調整することによって、コードクロック制御信号3016中に示された位相差を補償し得る。
【0150】
局所的に生成されたPRN系列が、同相の受信されたPRN系列の前方にあるとき、弁別器出力信号3015は正の位相差を示し、それに応じてコードクロック生成器3006にPRNクロック信号3018を調整(周波数を減少、位相シフトを減少)させる。局所的に生成されたPRN系列が、同相の受信されたPRN系列の後方にあるとき、弁別器出力信号3015は負の位相差を示し、それに応じてコードクロック生成器3006にPRNクロック信号3018を調整(周波数を増加、位相シフトを増加)させる。一実施形態では、入力q(n)3011とi(n)3012とはコードトラッキングループ3000内で位相整合されて到着し、ただし、直交信号q(n)3011はADC内のi(n)3012から90度オフセット上でサンプリングされる。受信されたPRNコード系列と局所的に生成されたPRNコード系列との間の位相差の特定のしきい値が、負帰還制御ループにおける適切な位相ロックを劣化させることなしに、通常動作中にいつでも存在し得ることを当業者は認識するであろう。
【0151】
弁別器出力信号3015は、PRNクロック信号3018と同相入力i(n)3012との間の位相誤差推定値を表す。位相誤差推定値は、同相入力i(n)3012の位相と周波数とを追跡するようにコードクロック生成器3006を調整するために使用される。GPSキャリアにおけるドップラーシフトに基づく擬似距離変化率などのキャリア情報は、コードループフィルタ3005の帯域幅を調整するために使用され得、雑音性能と動的性能との間の有益なトレードオフを実装する。キャリア情報はレート補助信号3016を介して搬送され得る。
【0152】
図31に、(図32に関して説明する)追跡エンジン3200と、(図30に関して説明した)コードトラッキングループ3000およびコード生成器3003と、(図41に関して説明する)6タップ生成器4100との間の例示的な関係を示す。図31に示すように、6タップ生成器4100はコード生成器3003中に含まれ、コード生成器3003はコードトラッキングループ3000中に含まれ、コード生成器3003は追跡エンジン3200中に含まれる。これらの構成要素間の特定の結合については、図30、図32、および図41に関して説明してあることに留意されたい。
【0153】
検索エンジン105AによってGPSおよび/またはGLONASS衛星が捕捉された後、追跡エンジン105Bは、連続的リアルタイム位置判断を行うために、見える識別された衛星の各々を追跡することができる。一実施形態では、(追跡エンジン105Bの一部を形成する)GPS追跡エンジンとGLONASS追跡エンジンとは、実質的に同様の構成要素を有し得る。GPS追跡エンジンとGLONASS追跡エンジンとの間の差異については、以下でさらに詳細に説明する。
【0154】
上記のように、GLONASSはCDMAシステムの代わりにFDMAシステムを使用する。ただし、デュアルモードインターフェース104のチャネルミキサにおけるチャネル周波数オフセットは削除され得るので、GPS衛星とGLONASS衛星とを追跡するために同じ入力サンプリングレートとデータビット幅とが使用され得る。GLONASSは、GPSと同じナビゲーションビット持続時間(20ms/ビット)を有するが、これらのナビゲーションビットは10msメアンダ系列でモジュール2変調される。そのメアンダ系列は10msビット遷移をもたらし、これは、ストリング同期が検出される前にFLL(周波数ロックループ)およびDLL(遅延ロックループ)のためのコヒーレント積分時間を限定する。GLONASSは、2倍のC/Aチップ持続時間(約2μs)を有し、GPSよりも大きい数メートルのコード位相誤差をもたらすことにさらに留意されたい。
【0155】
図32に、ハードウェアベースの相関器3210と、ファームウェアベースのGMLアルゴリズム3211とを含む例示的な追跡エンジン3200を示す。この実施形態では、相関器3210は、ミキサ3201と、積分およびダンプ(I&D)ブロック3204と、ミキサ3205と、I&Dブロック3208とを含み、すべてが直列に結合される。コードNCO3203(たとえば32ビット)はそれの出力をコード生成器3202に与えることができ、コード生成器3202は今度はそれの出力をミキサ3201に与える。キャリアNCO3207(たとえば24ビット)はそれの出力をsin/cosテーブル3206に与えることができ、sin/cosテーブル3206はそれの出力をミキサ3205に与える。GML3211の一部であるデポラライザ(depolarizer)3209は、I&Dブロック3208によって出力された結果を復極する(depolarize)ことができる。これらの分極結果は、追跡制御と、DLLと、FLLと、ビット境界判断と、時間マーク判断と、データビット抽出とを行うために(ソフトウェアによって)使用され得る。ソフトウェアは、コード周波数をコードNCO3203に与え、ドップラー周波数をキャリアNCO3207に与えることができることに留意されたい。一実施形態では、相関器3210は、コード生成器3202(たとえば、GPSコード生成器2608A(図29)およびGLONASSコード生成器2608B(図30)を参照)を除いて、GPSでもGLONASSでも同じであり得る。
【0156】
GPS信号は熱雑音中に浸漬される。たとえば、一般的な信号電力は−130dBm未満であるが、(1MHzの帯域幅にわたる)熱雑音は一般に約−110dBmである。信号の相対品質を判断するために雑音電力が測定され得ることに留意されたい。図33に示す一実施形態では、この機能を提供するために、事前相関GPS雑音推定器3301および事前相関GLONASS雑音推定器3302は、相関の前に雑音電力を測定するために使用され得る。事前相関GPS雑音推定器3301(すなわち、追跡エンジン3200の相関器3210の前)がすべてのGPS追跡チャネル(I&D2404Aの出力)によって共有され得ることに留意されたい。対照的に、事前相関GLONASS雑音推定器3302は、マルチプレクサ(図示せず)を用いて入力(I&D2404Bからの出力のうちの1つ)を選択することによって、特定のGLONASSチャネルに同調することができる。
【0157】
一実施形態では、従来の雑音タップベースの雑音推定器が追跡エンジン3200中の追跡チャネル内に保持され得る。すなわち、従来の追跡エンジンは複数のタップを含み、各タップは、入来信号と相関する異なるコード位相のためのものである。データロックループが動作する(それによって、正確なロケーション判断を可能にする)ために、プロンプトタップ、早いタップ、および遅いタップが使用され得る。この構成では、プロンプトタップ値が最高値(電力)である場合、早いタップの数値と遅いタップの数値とが平衡され、追跡は良好として特徴づけられる。一実施形態では、雑音タップはまた、プロンプトタップから数チップ離れて与えられ得る。この雑音タップの値は、無視できるべきであり、信号対雑音比(SNR)を計算するために使用され得る。SNRは、データロックループを調整するために、プロンプト、早い、および遅いタブの数値とともに使用され得る。残念ながら、このSNR計算は、相関の後にくるので、遅く到着し、比較的低速である(msごとにただ1つの測定値を与える)。したがって、安定したデータロックループを与えるために数ミリ秒が必要とされ得る。(GPSおよびGLONASSのための)事前相関雑音推定器3301および3302は、たいていの条件の下で高速のSNR計算を可能にすることができる。
【0158】
雑音タップベース雑音推定器は干渉の影響を相関出力に反映しないので、事前相関雑音推定器3301および3302は、雑音タップベース雑音推定器よりも狭帯域干渉に対して脆弱であり得ることに留意されたい。したがって、上述のように、一実施形態では、従来の雑音タップ雑音推定器はシステム中に保持され得る。この場合、従来の雑音推定器を補完し、性能を向上させるために、事前相関雑音推定器3301および3302が使用され得る。
【0159】
図34に、例示的なGPS事前相関雑音推定器3301を示す。入力信号は、I構成要素とQ構成要素とをもつ8MHz信号であり得る。合計ブロック3402およびダンプブロック3402は、帯域外雑音を削除するために、固定比8:1積分およびダンプ動作を実行することができる。ダンプブロック3402の出力は、絶対値ブロック3403Aおよび3403Bに提供される。絶対値ブロック3403Aおよび3403Bの出力は、加算器3404によって合計され得る。合計ブロック3405およびダンプブロック3406は、帯域外雑音を削除するために、加算器3404の出力に対して積分およびダンプ動作を実行することができる。この実施形態では、ダンプは1msクロックによって駆動され得る。各ダンプにおける累積の数はダンプごとに変動し得る(比率カウント:1)ことに留意されたい。
【0160】
一実施形態では、合計ブロック3405は、各ダンプの正確なカウントを与えるために、カウンタを含むことができる。ダンプブロック3406によって生成されたアキュムレータ出力と同様に、このカウント値は、正確な平均を計算するためにGML3211(図32)にパスされ得る。代替的に、
【数18】
【0161】
の公称値はカウント値を近似することができ、fBBはベースバンド(たとえば16MHz)におけるクロックレートである。GPS雑音推定器3301の出力は、推定雑音電力を計算するために、1msごとにGML3211にパスされ得る。異なるGPS衛星が同じ周波数帯域を占有するので、すべてのGPS追跡チャネルのためにただ1つのGPS雑音推定器3301が必要とされることに留意されたい。
【0162】
図35に、例示的なGLONASS事前相関雑音推定器3302を示す。GLONASS雑音推定器3302は、GPS雑音推定器3301と同じ構成要素を含むが、中間ブロックについて異なるデシメーション比(decimation ratio)とビット幅とを有することに留意されたい。
【0163】
GLONASSはFDMAシステムであるので、(チャネル周波数オフセットを削除した後に)チャネルごとに1つのGLONASS雑音推定器3302が与えられ得る。1つのリソース効率的な実施形態では、GLONASS3302のための1つの事前相関雑音推定器は、すべてのアクティブなGLONASSチャネルとともに使用するために時分割され得る。この実施形態は、雑音電力が安定した測定値であることに依拠する。再び図33を参照すると、MUX3303は、所望のチャネルを選択することができ、信号をそのチャネル上で事前相関雑音推定器3302にパスする。一実施形態では、累積の数をカウントするために、アキュムレータ3405の一部としてカウンタが含まれ得る。積分時間が異なるチャネル間で変動する場合、このカウントは適切な正規化を保証することができる。
【0164】
GPS事前相関雑音推定器3301と、GLONASS事前相関雑音推定器3302と、追跡エンジン105Bとにおける従来のタップの結果は、白色雑音のみが存在する(たとえば、事前相関雑音推定器の結果と従来のタップの結果とが実質的に同じとき)か、干渉物が存在する(たとえば、事前相関雑音推定器の結果と従来のタップの結果とが異なるとき)か、およびどの(1つまたは複数の)衛星が重み付け解除(de-weight)されるべきであるかを判断するために使用され得、または場合によってはロケーション判断のために使用さえされない。一実施形態では、有意な干渉が存在するかどうかを判断するために、2つの雑音測定値の差がしきい値と比較され得る。別の実施形態では、この情報は、対応する衛星が、劣化した品質により、ユーザ位置を判断するために使用されることから除外されるべきであるかどうかを判断する推定信号電力と組み合わせられ得る。
【0165】
図36および図37に、推定雑音電力対事前相関雑音推定器(たとえば、GPS事前相関雑音推定器3301またはGLONASS事前相関雑音推定器3302)のための時間の例示的なシミュレーショングラフを示す。これらのシミュレーションでは、合計800個の観測値が連続的に記録される。図36と図37とを比較することによって示されるように、事前相関雑音推定器は、従来の雑音タップ推定器に比較して著しくより安定した推定値を与えることができる。安定した雑音電力推定を行うことは、GMLが正確なC/N0推定を迅速に取得することを可能にすることができる。
【0166】
柔軟な6タップ生成器
従来の生成器は、各追跡チャネルにおいて4つのタップ、すなわちE(早い)と、P(プロンプト)と、L(遅い)と、N(雑音)とをサポートする。この生成器では、それぞれ、最小タップ間隔は、2、4、および8MHzのシフトレジスタレート(SRR)に対して1/2、1/4、および1/8チップである。改善された追跡エンジンの1つの機能によれば、6タップ生成器が含まれ得る。
【0167】
有利には、マルチパス緩和が可能なダブルデルタ(DD)遅延ロックループがGML中に含まれるとき、6タップ生成器が使用され得る。一実施形態では、第1〜第5のタップ(すなわち、VE(非常に早い)、E(早い)、P(プロンプト)、L(遅い)、およびVL(非常に遅い))は弁別器を形成するために使用され得、第6のタップは雑音タップとして使用され得る。
【0168】
図38に、高度ダブルデルタコード弁別器をサポートする例示的な6タップコード生成器3800を示す。この実施形態では、(コンテキストのために示してある)コードNCO3203がプロンプトタップのための瞬時コード位相をカウントすることができる。それの桁上げ(たとえば1ビット桁上げ)は、(同じくコンテキストのために示してある)CAコード生成器3202を駆動して、9段シフトレジスタ3207中にバッファされたコード系列を生成させる。シフトレジスタ3807における(塗りつぶしパターンで示してある)中央のビットは、プロンプトタップのための現在のコードビット(コードP)を記憶することができる。すべての他のタップのコード系列はプロンプトタップのコードに関して生成される。それらのコード位相(コードN、VE、E、L、およびVL)は、(ソフトウェアによって判断された)プロンプトタップコード位相と相対タップ間隔(RTS)とに基づいて計算され得る。次いで、計算されたコード位相は、適切なチップを出力するためにシフトレジスタ3807における適切なビットを選択するために、アドレスとして使用され得る。従来のタップ生成器はチップサンプルを記憶することに留意されたい。したがって、6タップ生成器3800は、有利には、記憶リソースを最小限に抑えることができる。
【0169】
図39に、32ビット周波数信号を受信し、マルチプレクサ3902への入力を生成する加算器3901を含む例示的なコードNCO3201を示す。マルチプレクサ3902への他の入力は8ビット位相信号である。マルチプレクサ3902は、(NCOを初期化するかまたは増分によってNCOを更新するためにGMLによって生成されたSET信号によって選択された)それの出力を、32ビットNCOレジスタ3903に与えることができる。コードNCO3903の1ビット桁上げ信号は、CAコード生成器3202のクロックを駆動するために使用される。NCOレジスタ3903の出力は、加算器3901ならびに切捨てブロック3803に第2の入力として与えられる。切捨てブロック3803は、コード位相を、(31/32チップ分解能を与える)その5つの最上位ビット(MSB)に切り捨てる。この構成では、シフトレジスタ3807は桁上げ信号によって事実上クロック制御され得、すなわち、コンテンツは、新しいチップが生成されるたびにシフトされ得る。
【0170】
「プロンプト」タップ(すなわち、プロンプト位置3910)におけるチップは、(マルチプレクサ3806Aに0としてインデックス付けされた)レジスタ3807の中心に所与の時間に基準として記憶される。チップのそれの部分コード位相は、32ビットNCOレジスタ3903中に記憶される。任意の他のタップのコード位相は、切捨てブロック3803によって出力されたプロンプトタップコード位相とプロンプトタップまでの相対タップ間隔(RTS)(図39ではRTS:N)とを使用して加算器3801Aによって計算され得る。次いで、計算されたコード位相はフロアブロック3805A(すなわち、フロアブロック3805Aは、加算器3804Aによって生成された和の整数部分だけを使用する)によって切り捨てられ、次いで、切り捨てられた数値は、シフトレジスタ3807から(MUX3806Aを介して)所望のチップを選択するためにアドレスとして使用される。タップ間隔ソリューションが1/32チップであり、最終チップスパンが−4〜4チップであるように、RTS値(N=雑音、VE=非常に早い、E=早い、L=遅い、およびVL=非常に遅い)はs3.5フォーマットであり、Pタップ小数コード位相の上位5ビットはu0.5にフォーマットされる。
【0171】
再び図38を参照すると、複数の加算器3804B〜3804E、フロア3805B〜3805E、およびマルチプレクサ3806B〜3806Eが、加算器3804A、フロア3805A、およびマルチプレクサ3806Aと同様に機能する。したがって、シフトレジスタ3807の各レジスタは異なるチップを保持することができ、それによって、タップ間隔とタップスパンとの間のトレードオフを除去する。
【0172】
8MHz相関分解能を得るために、CAコード生成器3202およびフロアブロック3805A〜3805E(すなわちチップセレクタ)における位相更新が8MHzでも実行され得ることに留意されたい。シフトレジスタ3807、CAコード生成器3202、およびすべてのタップのためのチップインデックス付けは、電力を節約するために、それらの桁上げ信号(たとえば、キャリア信号またはNCO reg3903のオーバーフロー)によって駆動され得る。節電機能とともにより低い相関分解能とともに一実施形態では、CAコード生成器3202およびフロアブロック3805A〜3805Eにおける位相更新は、2または4MHz(すなわち、より低い周波数)でも実行され得る。
【0173】
有利には、上記で説明した共有構成により、ロケーション判断システム100は、GPSのみ、GPSおよびGLONASS(常時オン、固定)、ならびにGPSおよびGLONASS(動的)の3つのモードのうちの1つで動作することができる。一実施形態では、選択されたモードは、現在利用可能な電力に基づくことができる(すなわち、低い電力可用性はGPSのみのモードをトリガすることができるが、高い電力可用性はGPSおよびGLONASS(固定)モードをトリガすることができる)。一実施形態では、(動作周波数のわずかな差による)GPSおよびGLONASSに関連する雑音の差は、GPSのみのモードが選択されるかGPSおよびGLONASSのモードが選択されるかを判断することができる。
【0174】
一実施形態では、GPSおよびGLONASS(動的)モードは、検索エンジン105Aによって識別されたGPS衛星の数に基づいて選択され得る(たとえば、十分なGPS衛星が見えるときはGLONASSがオフにされ得、十分なGPS衛星が見えないときはGLONASSがオンにされ得る)。一実施形態では、十分なGPS衛星が見えるときでも、ロケーション判断をさらに改良するためにGLONASS衛星が使用され得る。すなわち、GPS衛星は、タイミングおよび基本ロケーション情報を与えることが可能であり得る。この情報と、GLONASS衛星のアルマナックと、粗いドップラー周波数とを用いて、1つまたは複数のGLONASS衛星の速い、効率的な捕捉が実行され得、それによって、ロケーション判断の改良を可能にする。
【0175】
ハードウェアレイテンシ較正
GPS受信機およびGLONASS受信機は、アンテナから検索エンジン/追跡エンジンまでのレイテンシを処理することに反応する。レイテンシが一定である場合、影響はクロックオフセットに吸収され得、したがって、PVT(位置、速度、および時間)ソリューションに対して透過的である。ただし、検索エンジンと追跡エンジンとでレイテンシが異なる場合、捕捉と追跡との間の適切なハンドオーバを保証するようにデルタを較正する必要がある。さらに、GLONASSとGPSとでこのレイテンシが異なる場合、システマティックバイアスを除去するようにデルタを較正する必要がある。さらに、異なるハードウェアモードでレイテンシが異なる場合も、無矛盾な1pps生成のためにデルタを較正する必要がある。
【0176】
アナログ回路におけるレイテンシ
SAWフィルタ202は、GPS帯域とGLONASS帯域とで異なる群遅延を有し得る。たとえば、GPSとGLONASSとの間で最高8nsの群遅延デルタが認識されており、様々なGLONASSデバイスにおけるGLONASSチャネル間では最高5nsである。一実施形態では、最悪状況を制限するために定数オフセットが加算され得る。たとえば、変動が−9nsから+3nsまでの間にある場合、定数3nsを加算することは、ワーストケース絶対誤差9nsの代わりに6nsを作成する。別の実施形態では、ルックアップテーブルが、温度変化および/またはプロセスコーナーに基づく群遅延デルタを含むことができる。一実施形態では、較正をいつ実行すべきかを知るために温度センサが使用され得る。別の実施形態では、補正量を調整するために温度センサが使用され得る。
【0177】
LNA201とミキサセット204との群遅延デルタは、非常に小さい、すなわち−0.1ns程度であることに留意されたい。したがって、LNA201またはミキサセット204のいずれに対しても較正は必要とされない。
【0178】
GPSポリフェーズフィルタ205Aの群遅延(すなわち、このフィルタを通過する遅延)は100nsであり得るが、GLONASSポリフェーズフィルタ205Bの群遅延は、帯域中心では80ns、および帯域エッジでは160〜210nsであり得る。したがって、ポリフェーズフィルタ205Aおよび205Bの較正が望ましい。
【0179】
図40に、ポリフェーズフィルタ206Aおよび206Bにおける異なるレイテンシを補償するための、AFE101の例示的な較正構成を示す。一実施形態では、ポリフェーズフィルタ206AはGPS用であり、ポリフェーズフィルタ206BはGLONASS用である。この構成では、ミキサ204は、通常使用中にポリフェーズフィルタ206A、206Bに結合され得る電流電圧コンバータ(I2V205)に結合される。較正構成では、ポリフェーズフィルタ206Aおよび206Bは、それぞれDACのペア4002Aおよび4002Bから入力を受信するように結合され得る。この結合は、マルチプレクサ、トランジスタまたは任意の他の技術的に実現可能な手段によって行われ得る。トーン生成器4001からI入力とQ入力とを受信するDAC4002Aおよび4002Bは、複素トーンを生成し、次いで、複素トーンはポリフェーズフィルタ206Aおよび206Bに注入され得る。一実施形態では、DAC4002Aおよび4002Bは、他のオンチップ回路から(たとえばBluetooth送信機から)「借用」され得る。一実施形態では、較正が起動時に実行され得る。別の実施形態では、(たとえばミリ秒程度の)群遅延に影響を及ぼす有意な温度変化の後にも、較正が実行され得る。
【0180】
ADC208Aおよび208Bはマルチプレクサ4004に結合され得る(DFEへの接続はAGC動作のために残るべきであることに留意されたい)。マルチプレクサ4004はADC208Aの出力と208Bの出力との間で選択し、それの出力を相関器4003に与え、相関器4003は各ADC出力をそれの対応するDAC入力と相関させる。相関値(すなわち遅延較正)は、ソフトウェアに報告され得、次いでソフトウェアによって位相オフセットに変換され得る。このプロセスは、群遅延を計算するために一連の周波数で繰り返され得る。
【0181】
図41に、一体型乗算器/飽和構成要素4101Aおよび4101Bと累積ブロック4102Aおよび4102Bとを含む例示的な相関器4003を示す。X入力は複素テストトーン(Re(X)およびIm(X))であり、Y入力は実ADC出力である。以下を仮定する。
【数19】
【0182】
上式で、Aはテストトーンの大きさであり、BはADC出力における受信信号の大きさであり、ωはテストトーンの周波数であり、tは時間であり、0は受信信号の位相である。
【0183】
次いで、相関のNポイント平均は以下の通りである(ただしN≫1)。
【数20】
【0184】
したがって、位相オフセットは、Θ=−angle(Z)として計算され得る。この時点で、位相の傾きを生じるために一連の周波数が使用され得る。群遅延は、位相の微分を見つけることによって計算され得る。
【0185】
DAC出力範囲は、IFフィルタおよびVGAの最大利得を用いて、ADCにおける出力がフルスケールに達することができるように設計され得る。ADCにおける出力が不十分な利得によりフルレンジでない場合、推定誤差は増加し得る。
【0186】
ポリフェーズフィルタ206Aとポリフェーズフィルタ206Bとは、1つがGLONASS用であり、1つがGPS用であるので、異なることに留意されたい。一実施形態では、相関器4003は、RFビルトインセルフテスト(RBIST)を実行するために、このバリエーションを判断することができる。たとえば、トーン生成器4001は、異なるトーンを生成することができ、相関器4003は、それらの異なるトーン(たとえば、通常の中心から+/−1Hz)に基づいて電力測定を実行することができる。これらのトーンからの電力比較に基づいて、相関器4003は、フィルタオフセットを計算し、次いで、フィルタをリセンタリングするために、フィルタにおけるキャパシタおよびレジスタ値を調整することができる。したがって、相関器4003はまた、製造ばらつきを補償するように構成され得る。
【0187】
デジタル回路におけるレイテンシ
ロケーション判断システムのデジタル回路におけるレイテンシは、特定のデジタル処理チェーン、すなわちGPSまたはGLONASSに依存する。図42に、レイテンシに寄与し得るデュアルモードインターフェース104のDFE_GPS102AおよびGPS使用構成要素のうちの例示的な構成要素を示す(ADC208Aと、検索エンジン105Aと、追跡エンジン105Bとは、コンテキストのために示してある)。図43に、レイテンシに寄与し得るデュアルモードインターフェース104のDFE_GLO102BおよびGLONASS使用構成要素の例示的な構成要素を示す(ADC208Bと、検索エンジン105A、および追跡エンジン105Bは、コンテキストのために示してある)。GPSデジタル処理チェーン対GLONASSデジタル処理チェーンでは、異なる構成要素が与えられるので、これらのチェーンが本質的に異なるレイテンシを有するであろうことに留意されたい。ただし、各々チェーンのレイテンシは決定論的であり、したがって他のチェーンのレイテンシを補償するために使用され得る。
【0188】
レイテンシルックアップテーブル
一実施形態では、各モジュールの処理レイテンシは、決定論的にカウントされ得、ルックアップテーブルに保存され得る。レイテンシは、ADCクロックサイクル数で指定され得る。
【0189】
論理的に、ブロックがバイパスされた場合、それの関連するレイテンシは除去される。一実施形態では、ルックアップテーブルは、RTL設計における各構成要素のすべてのモードおよび/または構成を含むことができ、異なるクロックレートおよび/または温度を考慮に入れることができる。デルタは、捕捉と追跡との間のコード位相、およびGPSとGLONASSとの間のコード位相を較正するために使用され得る。
【0190】
一実施形態では、較正は、ライブGPS信号を使用して実行され得る。この較正は、新しい位置を判断するために、既知の位置とライブGPS信号とを使用する。既知のユーザロケーションと既知の衛星ロケーションとを用いて、衛星からユーザまでの実際の無線信号移動時間が計算され得る。次いで、実際の移動時間と測定された移動時間との間の差はハードウェアレイテンシにマッピングされ得る。
【0191】
異なる衛星のための較正の適用
GPSとGLONASSとの間または異なるGLONASSチャネル間のレイテンシデルタをPVTソリューションのために補償すること、すなわち、LS(最小2乗)または(一連の雑音の多い測定値から線形動的システムの状態を推定する)カルマンフィルタの前にコード位相測定を相応に調整することができる。この調整は、GML、他の測定SW、またはナビゲーションSWにおいて行われ得る。
【0192】
ブランキング
一実施形態では、GPS/GLONASS受信機の入力において強い干渉があるとき、信号は、誤ったAGC測定値、捕捉結果、および追跡結果を生成することを回避するために「ブランキング」され得る。ブランキングをトリガする制御信号は複数のソースによって制御され得る。一実施形態では、ブランキングは、最高4つのソース、たとえば、(1)LNAにおいて飽和が検出されたときにトリガする、GLONASS受信機中のLNAのピーク検出器(内部)、(2)共存するBTシステムの送信インジケータ(内部)、(3)WiFi送信インジケータ(外部、随意)、および(4)セルフォン送信インジケータ(外部、随意)によって制御され得る。
【0193】
一実施形態では、2つの内部制御信号は1つの信号に組み合わせられ得る。たとえば、図44を参照すると、ANDゲート4401はピーク検出器(ピークDet)と第1のイネーブル信号(enl)とを受信することができ、ANDゲート4402は送信インジケータ(BT Tx1)と第2のイネーブル信号とを受信することができる。第1および第2のイネーブル信号enlおよびen2は、それぞれピーク検出器とBT送信機とによってブランキングをトリガすることができる。ANDゲート4401および4402の出力はORゲート4403によって受信され得、ブランクイネーブル(blank_en)信号を与える、ORゲート4403の出力は、ベースバンドチップ上の汎用入出力(GPIO)ピンに接続され得る。
【0194】
一実施形態では、すべての制御信号を統合するために、図44に関して説明する同様の論理を用いて、ブランキングを制御するために、ベースバンドチップ上にWiFiおよびセルフォン送信信号のための2つの他のGPIOピンがあり得る。「blank_en」という用語は、本明細書では、統合ブランキング制御信号全体を指す。
【0195】
任意の時点において、Bluetooth信号はちょうど1MHzの帯域幅を占有するが、中心周波数は最高毎秒1600回変化する(スロット当たり625μs)。マスタデバイスは偶数番号のスロット中に送信し、スレーブデバイスは奇数番号のスロット中に送信する。現在のBluetooth仕様はまた、パケットが複数の連続する(3つまたは5つの)スロットを占有するマルチスロット送信を可能にする。
【0196】
ヘッドセットおよびハンズフリーアプリケーションにおいて使用される最も一般的なBluetoothパケットタイプはHV3である。HV3は6つのスロットごとに反復し、マスタがスロット0において送信し、スレーブがスロット1において送信し、スロット2〜5がアイドルである。送信の実際のエアタイムは、約370μsであり、1スロット未満である。アクティビティは図45に示されている。GPSは、マスタ(たとえばスマートフォン)またはスレーブ(たとえばPND)と共同設置されるので、有効なオンタイムは0.37msであり、オフタイムは3.38msである。
【0197】
対照的に、WiFiはCSMAを使用し、非同期である。パケット長は数十マイクロ秒から数十ミリ秒まで変動する。さらに、送信間のギャップもユーザアクティビティに応じて著しく変動し得る。
【0198】
セルフォン送信に関して、各GSM(登録商標)周波数チャネルは4.615msフレームに分割される。1つのフレームは8つのスロットに分割され、各スロットは577μsである。GSMハンドセットは、基地局に通信するためにスロットのうちの1つを使用する。したがって、オンタイムは0.58msであり、オフタイムは約4.04msである。CDMAセルフォンは連続的に送信する。
【0199】
AGCのブランキング
強い干渉が存在するとき、ICD出力は増加し、AGCに利得を低減させる。干渉が消えたとき、AGCが利得をバックアップするのに時間がかかるので、利得のこの低減は望ましくない。この遅延を回避するために、blank_enが所定の値に等しいとき(たとえば、blank_en=1とき)、AGC動作をフリーズすることができる。
【0200】
GMLは、67msごとに周期的にAGCを実行する。67ms期間ごとに、4つの10ms測定値が取得され得る。AGCは、利得変更を決定する前に、4つの全測定値を累積する。
【0201】
測定中、blank_en=1である場合、対応する結果は無効である。一実施形態では、ICDは、図46に示す回路4600を使用してICD_validビットを生成することができる。回路4600は、blank_en信号を受信するインバータ4601を含む。ANDゲート4602は、反転blank_en信号とレジスタ4603の出力とを受信する。ANDゲート4602の出力はICD_valid信号である。一実施形態では、レジスタは1に初期化される。当該の時間中に、blank_enが1になった場合、ICD_valid信号はレジスタ4603のフィードバックにより0にロックされる。
【0202】
ブランキングを用いた例示的なAGC動作は、以下のステップを含むことができる。第1のステップにおいて、HWはAGC測定の前に1にICD_valid信号を初期化する。第2のステップにおいて、測定中にいつでもblank_en=1である場合、ICD_valid信号は0に設定される。blank_enが0に戻ったときでも、ビットは0のままである。第3のステップにおいて、測定値が完了している後、GMLは結果を検査する。ICD_valid=0である場合、結果は廃棄される。GMLが4つの連続する有効なICD測定値を得ることができない場合、利得変更は行われない。
【0203】
追跡チャネルのブランキング
追跡チャネルの3ビット入力は2の補数フォーマットである。一実施形態では、ブランクイネーブルビット(blank_en)が「1」であるとき、その3ビット入力は、実数0を生成するためにすべて0に設定される。積分中にblank_en=1が生成された場合、対応する追跡結果は無効である。一実施形態では、各追跡チャネルは、blank_enに基づいて有効な追跡ビット(TRK_valid)を設定する(図46を参照)。一実施形態では、動作は以下のステップを含むことができる。
【0204】
第1のステップにおいて、HWは、追跡チャネルを開始する前にTRK_validを1に初期化する。第2のステップにおいて、積分中にいつでもblank_en=1である場合、TRK_validは0に設定される。blank_enが0に戻ったときでも、ビットは0のままである。第3のステップにおいて、コードエポック境界において、追跡結果およびTRK_validビットは、GMLにパスされるためにハードウェア中に保存される。TRK_validは、次のコードエポックの前に1にリセットされ得る。エポックごとにステップ2および3が反復され得る。コードエポックは追跡チャネルのC/Aコード境界であり、TMEエポックではないことに留意されたい。各追跡チャネルは、それ自体の有効ビットを生成すべきである。
【0205】
廃棄されるべきデータユニットは、1ms積分結果であり得るか、またはPDI msの積分結果であり得る。ms間隔が選定された場合、(1つまたは複数の)消失したmsのための測定値が調整されるべきであり、それはより多くのコーディングおよびより多くのCPU使用率である。ただし、この調整は、ブランキングの影響を最小限に抑えることができ、したがってより良好な性能を有するべきである。PDI間隔が選定された場合、PDI間隔は現在のコード構造においてより良く適合するが、ブランキングの影響は最小でない。一実施形態ではPDI間隔が使用される。
【0206】
追跡結果が無効であるとき、追跡ループは巡航する必要がある、すなわちキャリアの周波数およびコードNCOは変化しない。ブランキング期間が長い場合、この期間は信号をドリフトさせ得、信号が戻った後、プルイン(pull-in)が必要であり得る。
【0207】
検索エンジンのブランキング
一実施形態では、検索エンジンへの入力は2ビット(符号、大きさ)フォーマットである。この入力は、積分およびダンプユニットにおいて2の補数に変換され得る。blank_en=1とき、変換された信号はすべて0に設定され、それによって+1ではなく実数0を保証する。
【0208】
捕捉結果は、多くのミリ秒にわたるコヒーレント積分および非コヒーレント積分から累積されるので、ブランキング中にデータを利用することは捕捉を非常に複雑にする。複雑さを効率とトレードオフする様々な手法がある。
【0209】
第1の手法は、ソフトウェアを変更せず、通常通り積分結果を使用することである。ブランキングが信号エネルギーの無視できる部分を取り除くだけであり、検出確率を劣化させなければ、この手法はうまく動作する。しかしながら、ブランキングが積分期間のかなりの部分を占める場合、積分値はしきい値をパスする可能性が低い。さらに、異なる積分値が不均等にブランキングされた場合、異なる積分結果の間にバイアスがあり、それはより高いフォールスアラームにつながり得る。
【0210】
第2の手法は、全積分期間中に単一のACQ_validビットを生成し、ACQ_valid=0である場合、積分結果を廃棄することである。廃棄された検索は後で再試行され得る。この手法は短い積分持続時間および副次的な干渉に対してのみうまく動作し、他の場合、再試行のコストは非常に高く、再試行成功率は非常に低い。
【0211】
第3の手法は、より微細グラニュラリティ(たとえばエポックの1/8)を用いて妥当性を検査し、各積分結果におけるブランキングされた期間のパーセンテージを計算するために有効ビットを累積することである。情報は、それに応じて結果を受け付ける/拒否するためにソフトウェアにパスされ得る。
【0212】
本発明の例示的な実施形態について添付の図を参照しながら本明細書で詳細に説明したが、本発明がそれらの正確な実施形態に限定されないことを理解されたい。
【0213】
たとえば、一実施形態では、GPSとGLONASSとの間のロケーション精度差が考慮に入れられる。すなわち、GLONASSの誤り率はGPSの2倍である。したがって、GLONASSからの信号とGPSからの信号とは別様に重み付けされ得、すなわち、GPS信号はGLONASS信号よりも大きな重みを与えられ、それによってシステム性能を最適化することができる(重み付き最小2乗ソリューション)。
【0214】
本明細書で説明する実施形態は、網羅的なものではなく、本発明を開示した正確な形態に限定するものでもない。したがって、多くの変更形態および変形形態は明らかであろう。たとえば、一実施形態では、上記で説明した追跡エンジンは、専用追跡エンジン、追跡目的のために使用される検索エンジン(たとえば、図1において追跡エンジン105Bを除去し、検索エンジン105Aのみを使用する)、または専用追跡エンジンと追跡を実行する検索エンジンとの組合せで実装され得る。それに応じて、本発明の範囲は、以下の特許請求の範囲およびそれらの等価物によって定義されるものとする。
【特許請求の範囲】
【請求項1】
GPS信号とGLONASS信号とを受信するための受信機であって、
アナログフロントエンド(AFE)と、
前記AFEの出力を受信するためのGPSデジタルフロントエンド(DFE)およびGLONASS DFEと、
前記GPS DFEおよびGLONASS DFEの出力を受信するためのデュアルモードインターフェース(DMI)と、
前記DMIの出力を受信するための検索エンジンとを備え、
前記AFEのフロントエンド構成要素が、前記GPS信号と前記GLONASS信号の両方を処理するように構成された、受信機。
【請求項2】
前記フロントエンド構成要素が低雑音増幅器(LNA)を含む、請求項1に記載の受信機。
【請求項3】
前記フロントエンド構成要素が単一のミキサセットを含む、請求項1に記載の受信機。
【請求項4】
前記フロントエンド構成要素が単一のI/Qミキサペアを含む、請求項1に記載の受信機。
【請求項5】
前記フロントエンド構成要素が単一の局部発振器(LO)を含む、請求項1に記載の受信機。
【請求項6】
前記LOが調整可能である、請求項5に記載の受信機。
【請求項7】
前記LOが動的に調整可能である、請求項5に記載の受信機。
【請求項8】
前記AFEがGPSポリフェーズフィルタとGLONASSポリフェーズフィルタとを含み、前記GPSポリフェーズフィルタと前記GLONASSポリフェーズフィルタとのうちの少なくとも1つについてのLO周波数とフィルタ中心周波数とが調整可能である、請求項5に記載の受信機。
【請求項9】
前記LO周波数と前記フィルタ中心周波数とが動的に調整可能である、請求項8に記載の受信機。
【請求項10】
前記LOが整数N合成器である、請求項5に記載の受信機。
【請求項11】
前記GPSポリフェーズフィルタと前記GLONASSポリフェーズフィルタとの通過帯域が正の周波数と負の周波数とのうちの1つであるように選択可能である、請求項8に記載の受信機。
【請求項12】
通過帯域選択が静的および動的のいずれかである、請求項11に記載の受信機。
【請求項13】
前記AFEがGPSポリフェーズフィルタとGLONASSポリフェーズフィルタとを含み、前記GPSポリフェーズフィルタおよび前記GLONASSポリフェーズフィルタの各々についてのフィルタ帯域幅が調整可能である、請求項1に記載の受信機。
【請求項14】
前記のフィルタ帯域幅が動的に調整可能である、請求項13に記載の受信機。
【請求項15】
前記AFEがGPS中間周波数(IF)フィルタとGLONASS IFフィルタとを含む、請求項1に記載の受信機。
【請求項16】
前記LOの周波数がGPS周波数とGLONASS周波数との間に設定される、請求項5に記載の受信機。
【請求項17】
前記LOの前記周波数は、GPS中間周波数(IF)がGLONASS IFを下回るように設定される、請求項16に記載の受信機。
【請求項18】
前記GPS IFがほぼ1〜6MHzの間にある、請求項17に記載の受信機。
【請求項19】
前記LOの前記周波数がほぼ1581.67MHzである、請求項18に記載の受信機。
【請求項20】
GPS信号とGLONASS信号の両方を受信するように構成された受信機のための局部発振器(LO)周波数を生成するための方法であって、
前記LO周波数をGPS周波数とGLONASS周波数との間に設定すること
を備える方法。
【請求項21】
前記LO周波数は、GPS中間周波数(IF)がGLONASS IFを下回るように設定される、請求項20に記載の方法。
【請求項22】
前記LO周波数は、前記GPS IFがほぼ1〜6MHzの間にあるように設定される、請求項21に記載の方法。
【請求項23】
前記LO周波数がほぼ1581.67MHzである、請求項22に記載の方法。
【請求項24】
GPS信号とGLONASS信号の両方を受信するように構成された受信機を動作させる方法であって、
GPS専用モードと、GPSおよびGLONASS固定モードと、GPSおよびGLONASS動的モードとのうちの1つから動作モードを選択することを備え、
前記GPSおよびGLONASS固定モードがGPSとGLONASSとを常時オンにし、
前記GPSおよびGLONASS動的モードが、GPSとGLONASSとのうちの1つを常時オンにし、別の1つを所定の条件に基づいてオンにする、方法。
【請求項25】
GPS信号とGLONASS信号とを同時に受信するための受信機であって、
アナログフロントエンド(AFE)と、
GPS経路とGLONASS経路とを含むデジタルフロントエンド(DFE)であって、前記AFEの出力を受信するDFEと、
前記DFEの出力を受信するためのデュアルモードインターフェース(DMI)と、
前記DMIの出力を受信するための検索エンジンと、
前記GPS信号と前記GLONASS信号とのうちの1つが必要とされないとき、前記DFEおよび前記DMIの専用回路を非活動化するための非活動化回路と
を備える受信機。
【請求項26】
前記非活動化回路がナビゲーションエンジンによって制御される、請求項25に記載の受信機。
【請求項27】
GPS信号とGLONASS信号とを同時に受信するための受信機であって、
アナログフロントエンド(AFE)と、
GPS経路とGLONASS経路とを含むデジタルフロントエンド(DFE)であって、前記AFEの出力を受信するDFEと、
前記DFEの出力を受信するためのデュアルモードインターフェース(DMI)と、
前記DMIの出力を受信するための検索エンジンと、
第2のシステムからの信号のみが位置判断を与えるとき、第1のシステムの専用回路を非活動化するための非活動化回路と
を備える受信機。
【請求項28】
GPS信号とGLONASS信号とを同時に受信するための受信機であって、
複数の衛星を捕捉するための検索エンジンと、
前記複数の衛星を追跡するための追跡エンジンとを備え、
前記検索エンジンと前記追跡エンジンとが、前記GPS信号と前記GLONASS信号とを処理するように構成された、受信機。
【請求項1】
GPS信号とGLONASS信号とを受信するための受信機であって、
アナログフロントエンド(AFE)と、
前記AFEの出力を受信するためのGPSデジタルフロントエンド(DFE)およびGLONASS DFEと、
前記GPS DFEおよびGLONASS DFEの出力を受信するためのデュアルモードインターフェース(DMI)と、
前記DMIの出力を受信するための検索エンジンとを備え、
前記AFEのフロントエンド構成要素が、前記GPS信号と前記GLONASS信号の両方を処理するように構成された、受信機。
【請求項2】
前記フロントエンド構成要素が低雑音増幅器(LNA)を含む、請求項1に記載の受信機。
【請求項3】
前記フロントエンド構成要素が単一のミキサセットを含む、請求項1に記載の受信機。
【請求項4】
前記フロントエンド構成要素が単一のI/Qミキサペアを含む、請求項1に記載の受信機。
【請求項5】
前記フロントエンド構成要素が単一の局部発振器(LO)を含む、請求項1に記載の受信機。
【請求項6】
前記LOが調整可能である、請求項5に記載の受信機。
【請求項7】
前記LOが動的に調整可能である、請求項5に記載の受信機。
【請求項8】
前記AFEがGPSポリフェーズフィルタとGLONASSポリフェーズフィルタとを含み、前記GPSポリフェーズフィルタと前記GLONASSポリフェーズフィルタとのうちの少なくとも1つについてのLO周波数とフィルタ中心周波数とが調整可能である、請求項5に記載の受信機。
【請求項9】
前記LO周波数と前記フィルタ中心周波数とが動的に調整可能である、請求項8に記載の受信機。
【請求項10】
前記LOが整数N合成器である、請求項5に記載の受信機。
【請求項11】
前記GPSポリフェーズフィルタと前記GLONASSポリフェーズフィルタとの通過帯域が正の周波数と負の周波数とのうちの1つであるように選択可能である、請求項8に記載の受信機。
【請求項12】
通過帯域選択が静的および動的のいずれかである、請求項11に記載の受信機。
【請求項13】
前記AFEがGPSポリフェーズフィルタとGLONASSポリフェーズフィルタとを含み、前記GPSポリフェーズフィルタおよび前記GLONASSポリフェーズフィルタの各々についてのフィルタ帯域幅が調整可能である、請求項1に記載の受信機。
【請求項14】
前記のフィルタ帯域幅が動的に調整可能である、請求項13に記載の受信機。
【請求項15】
前記AFEがGPS中間周波数(IF)フィルタとGLONASS IFフィルタとを含む、請求項1に記載の受信機。
【請求項16】
前記LOの周波数がGPS周波数とGLONASS周波数との間に設定される、請求項5に記載の受信機。
【請求項17】
前記LOの前記周波数は、GPS中間周波数(IF)がGLONASS IFを下回るように設定される、請求項16に記載の受信機。
【請求項18】
前記GPS IFがほぼ1〜6MHzの間にある、請求項17に記載の受信機。
【請求項19】
前記LOの前記周波数がほぼ1581.67MHzである、請求項18に記載の受信機。
【請求項20】
GPS信号とGLONASS信号の両方を受信するように構成された受信機のための局部発振器(LO)周波数を生成するための方法であって、
前記LO周波数をGPS周波数とGLONASS周波数との間に設定すること
を備える方法。
【請求項21】
前記LO周波数は、GPS中間周波数(IF)がGLONASS IFを下回るように設定される、請求項20に記載の方法。
【請求項22】
前記LO周波数は、前記GPS IFがほぼ1〜6MHzの間にあるように設定される、請求項21に記載の方法。
【請求項23】
前記LO周波数がほぼ1581.67MHzである、請求項22に記載の方法。
【請求項24】
GPS信号とGLONASS信号の両方を受信するように構成された受信機を動作させる方法であって、
GPS専用モードと、GPSおよびGLONASS固定モードと、GPSおよびGLONASS動的モードとのうちの1つから動作モードを選択することを備え、
前記GPSおよびGLONASS固定モードがGPSとGLONASSとを常時オンにし、
前記GPSおよびGLONASS動的モードが、GPSとGLONASSとのうちの1つを常時オンにし、別の1つを所定の条件に基づいてオンにする、方法。
【請求項25】
GPS信号とGLONASS信号とを同時に受信するための受信機であって、
アナログフロントエンド(AFE)と、
GPS経路とGLONASS経路とを含むデジタルフロントエンド(DFE)であって、前記AFEの出力を受信するDFEと、
前記DFEの出力を受信するためのデュアルモードインターフェース(DMI)と、
前記DMIの出力を受信するための検索エンジンと、
前記GPS信号と前記GLONASS信号とのうちの1つが必要とされないとき、前記DFEおよび前記DMIの専用回路を非活動化するための非活動化回路と
を備える受信機。
【請求項26】
前記非活動化回路がナビゲーションエンジンによって制御される、請求項25に記載の受信機。
【請求項27】
GPS信号とGLONASS信号とを同時に受信するための受信機であって、
アナログフロントエンド(AFE)と、
GPS経路とGLONASS経路とを含むデジタルフロントエンド(DFE)であって、前記AFEの出力を受信するDFEと、
前記DFEの出力を受信するためのデュアルモードインターフェース(DMI)と、
前記DMIの出力を受信するための検索エンジンと、
第2のシステムからの信号のみが位置判断を与えるとき、第1のシステムの専用回路を非活動化するための非活動化回路と
を備える受信機。
【請求項28】
GPS信号とGLONASS信号とを同時に受信するための受信機であって、
複数の衛星を捕捉するための検索エンジンと、
前記複数の衛星を追跡するための追跡エンジンとを備え、
前記検索エンジンと前記追跡エンジンとが、前記GPS信号と前記GLONASS信号とを処理するように構成された、受信機。
【図1】

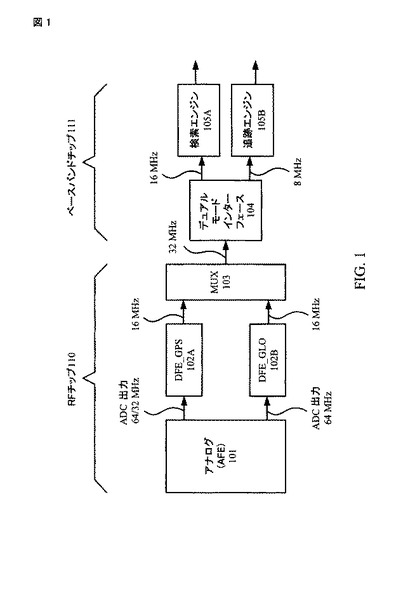
【図2A】
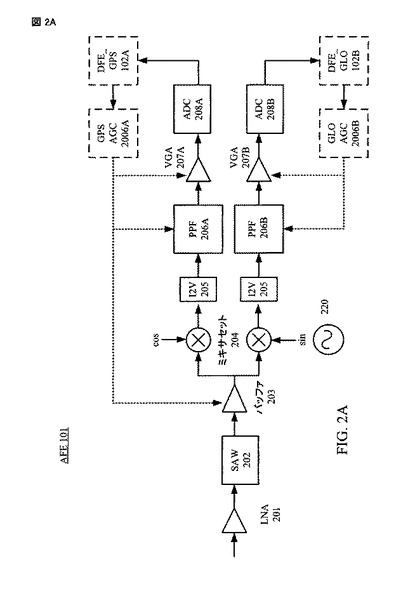
【図2B】
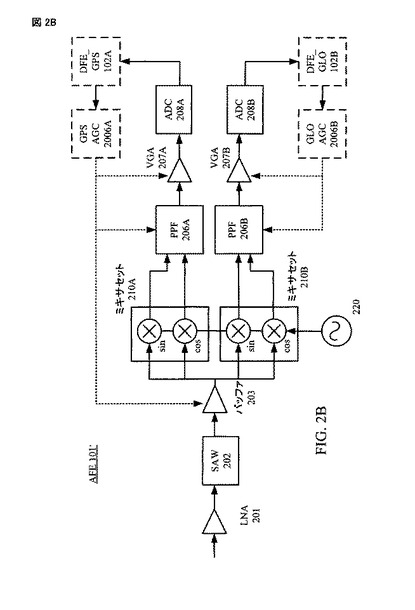
【図3A】
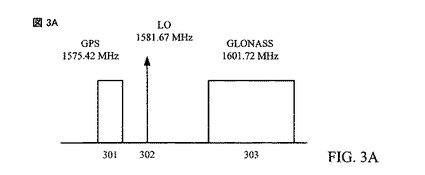
【図3B】
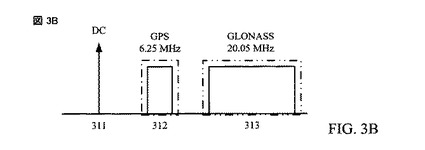
【図3C】
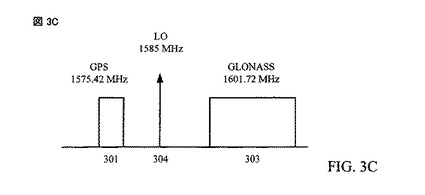
【図3D】
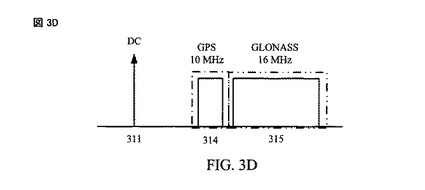
【図3E】
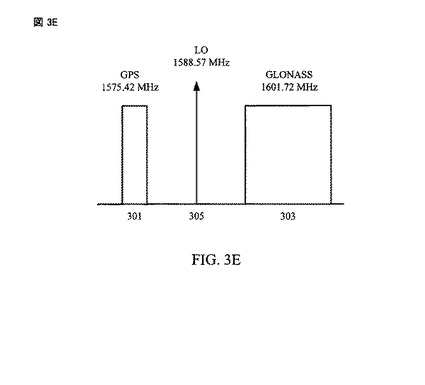
【図3F】
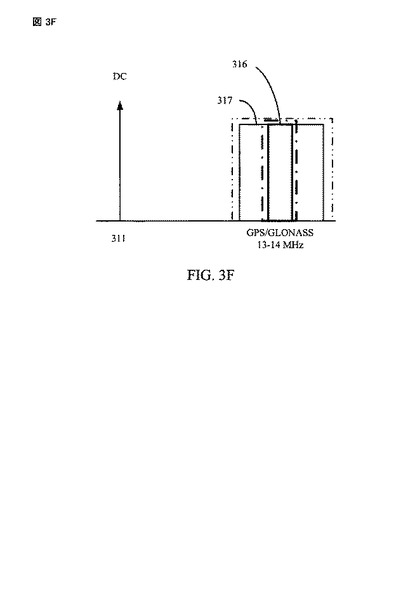
【図4】
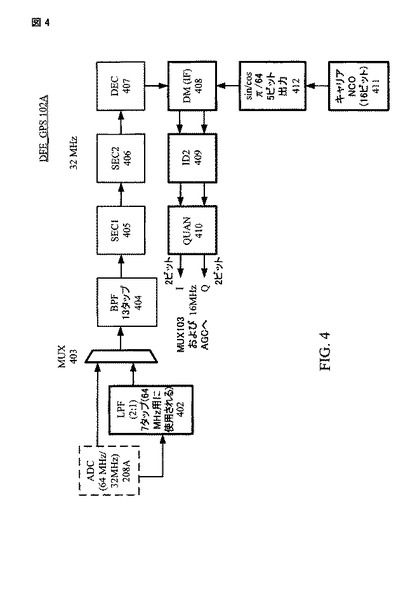
【図5】
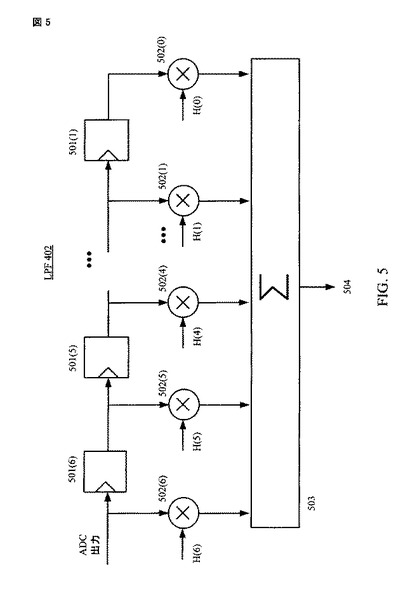
【図6】
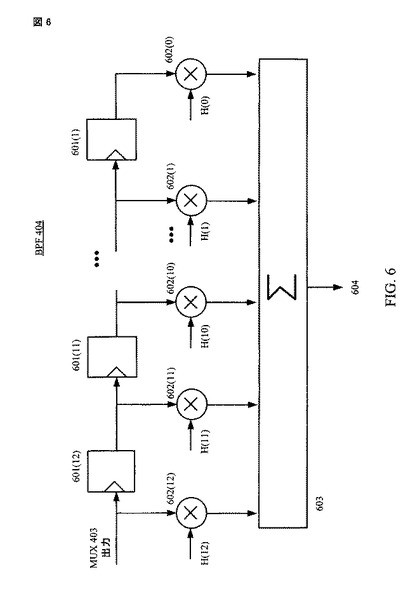
【図7】
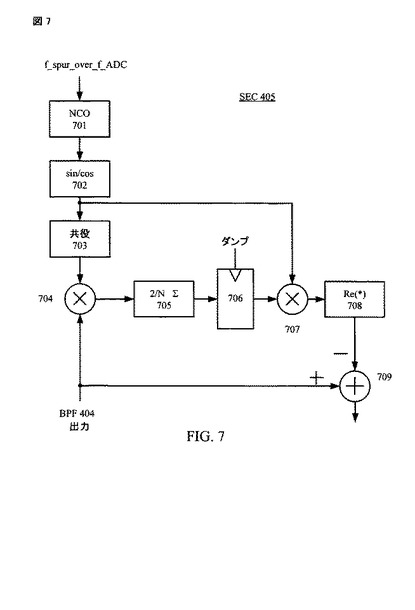
【図8】
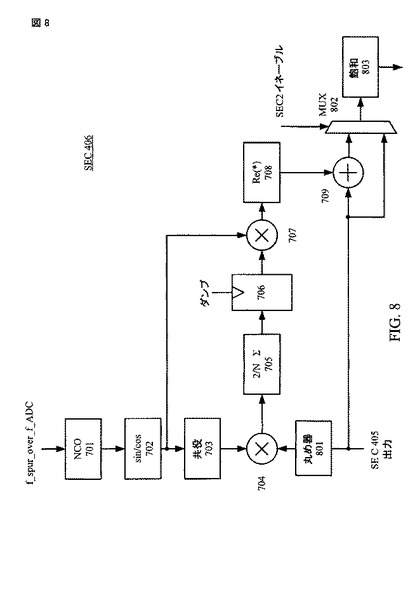
【図9】
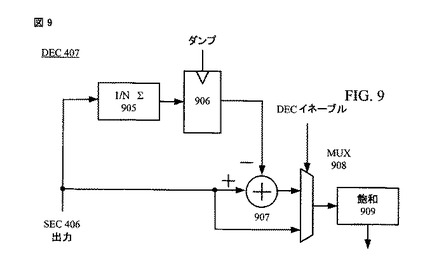
【図10】
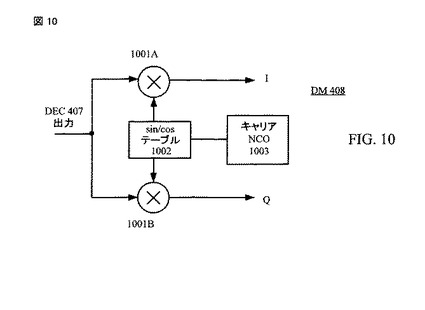
【図11】
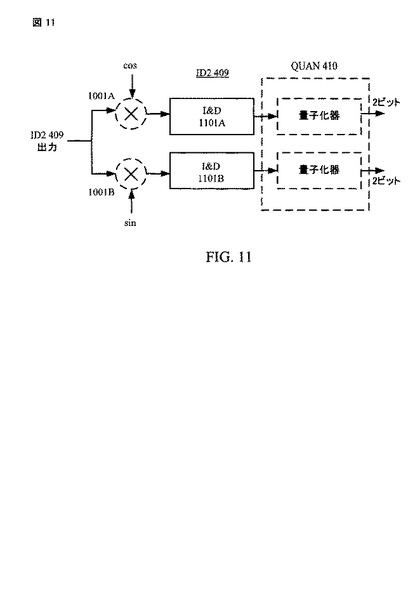
【図12】
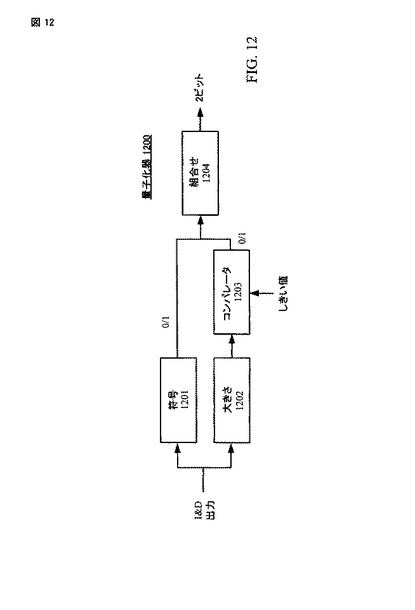
【図13A】
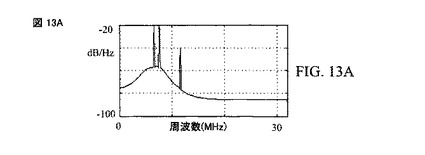
【図13B】
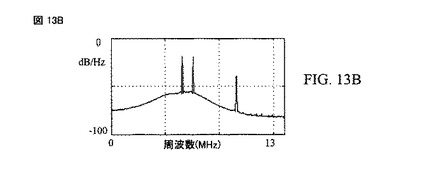
【図13C】
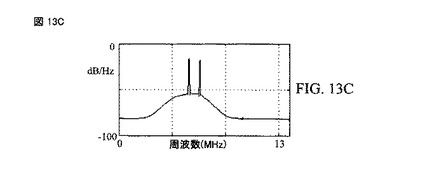
【図13D】
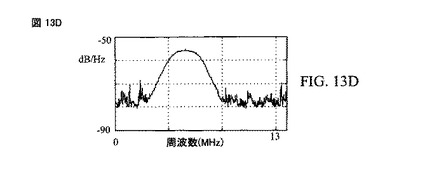
【図13E】
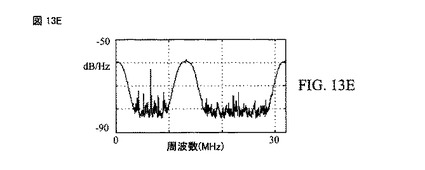
【図13F】
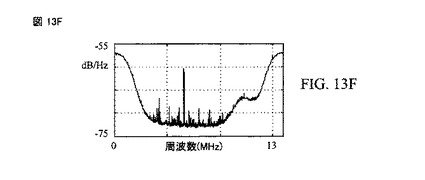
【図14A】
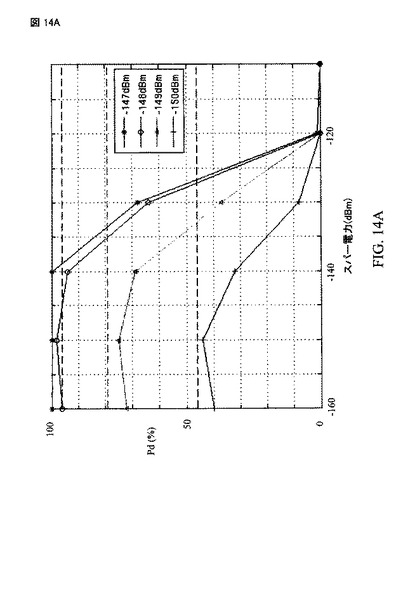
【図14B】
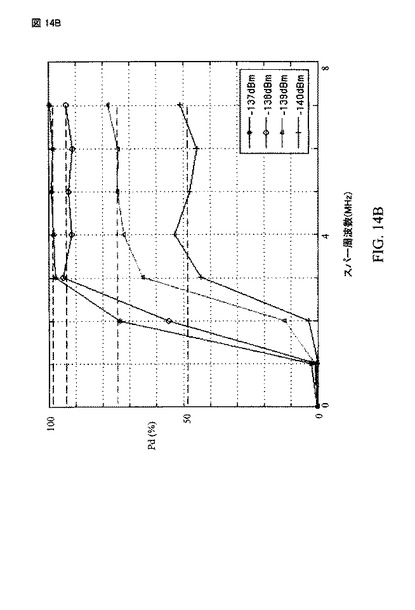
【図14C】
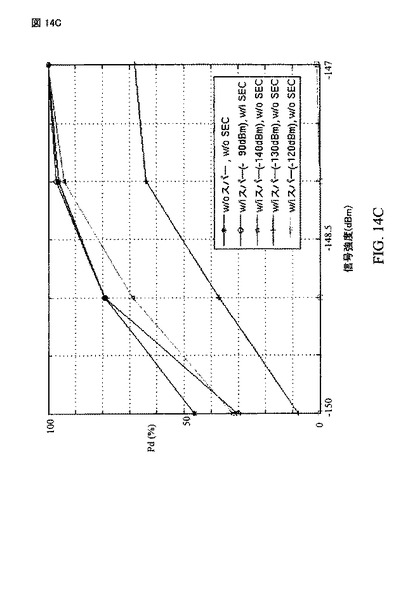
【図14D】
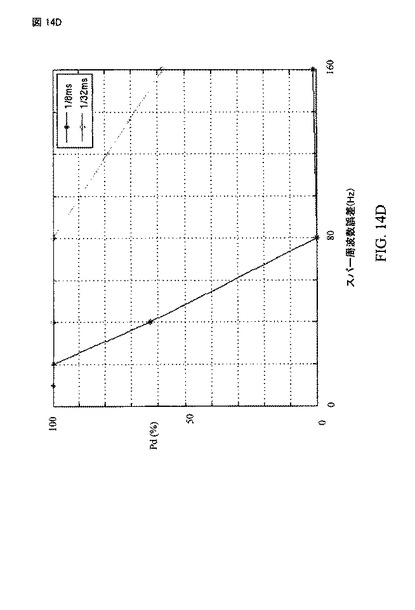
【図15】
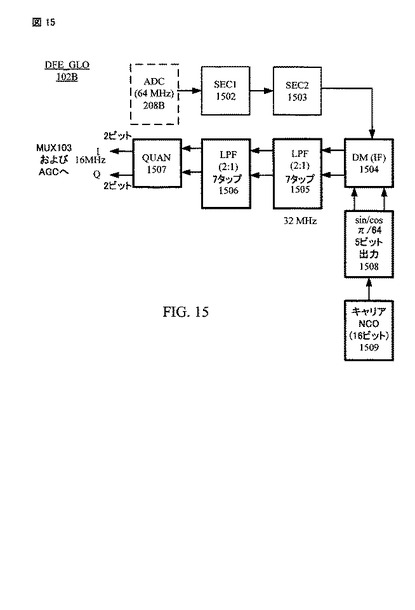
【図16】
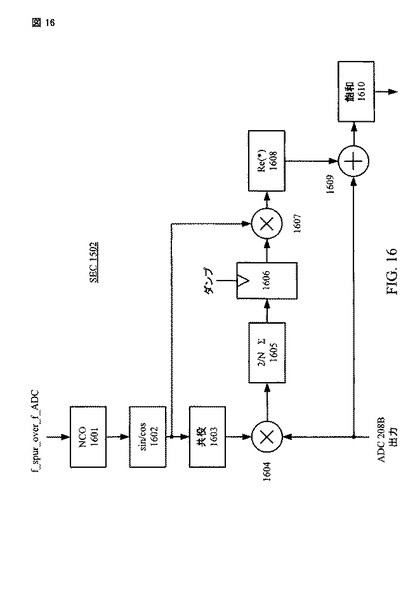
【図17】
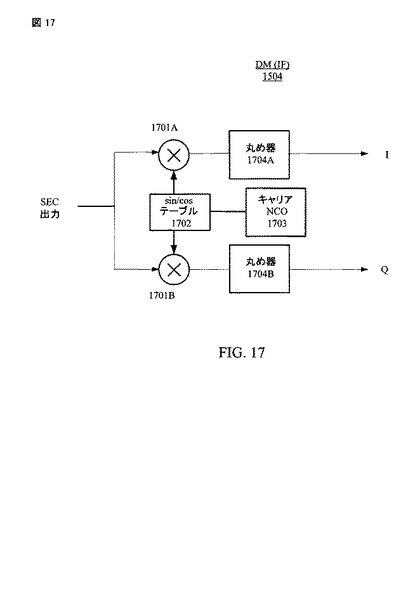
【図18】
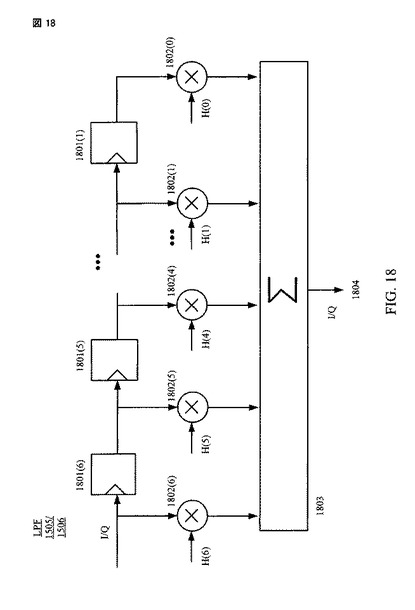
【図19】
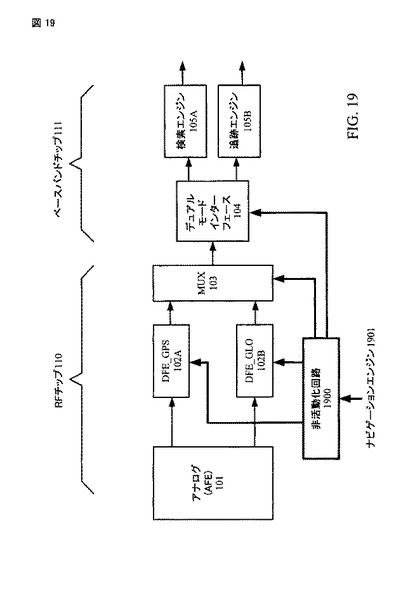
【図20】
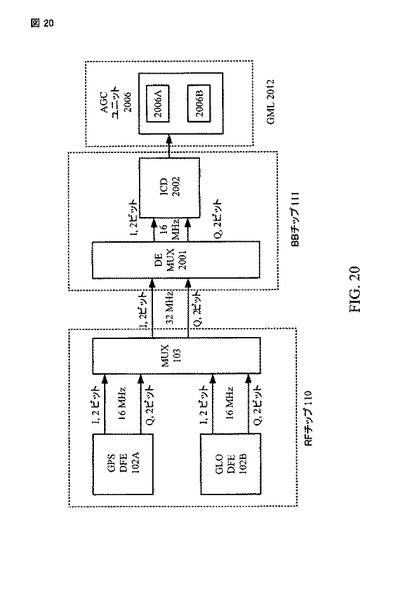
【図21】
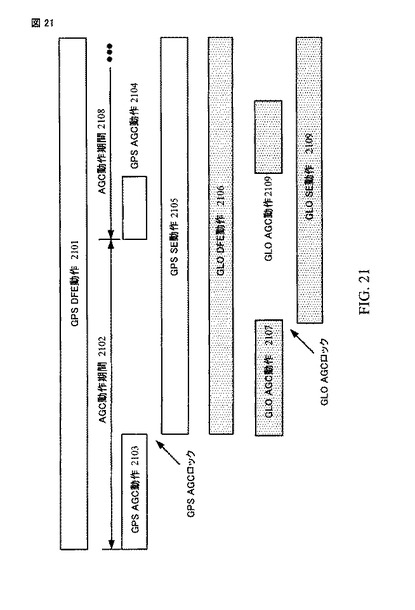
【図22】
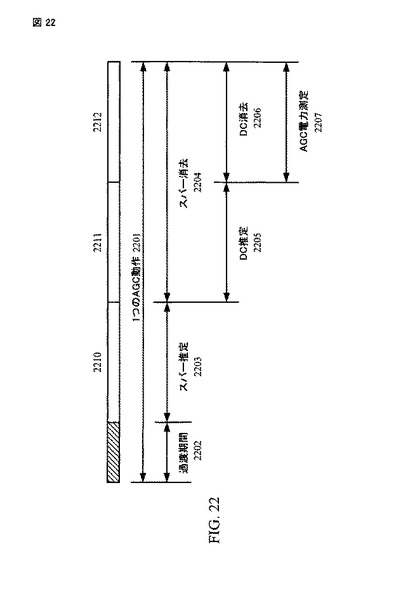
【図23】
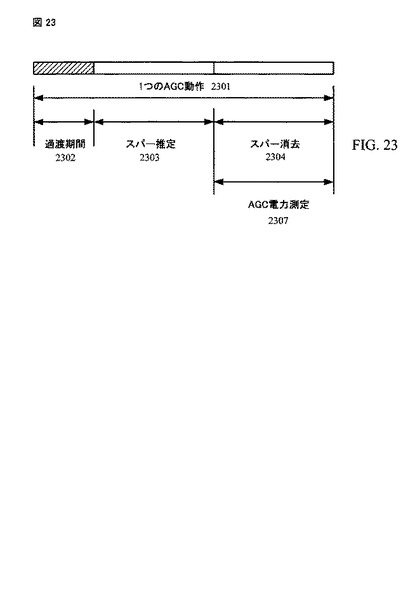
【図24】
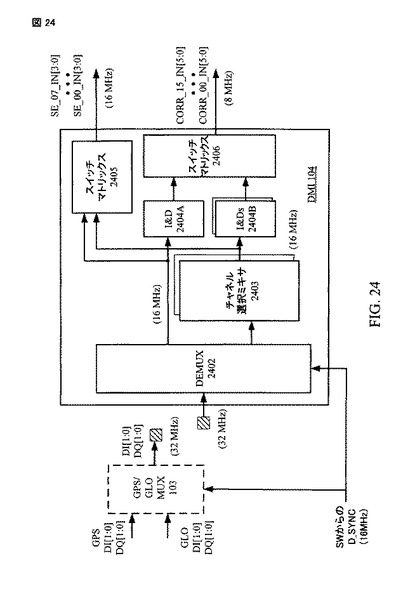
【図25】

【図26】
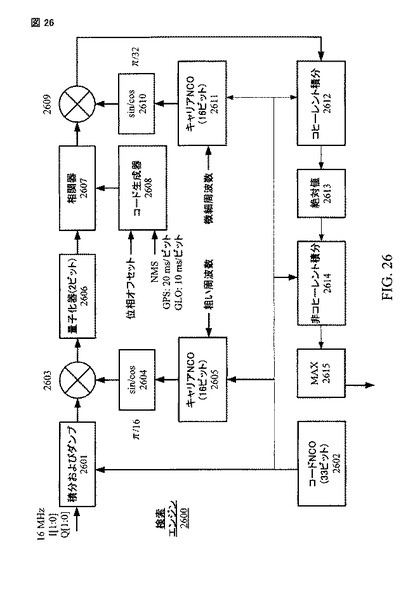
【図27】
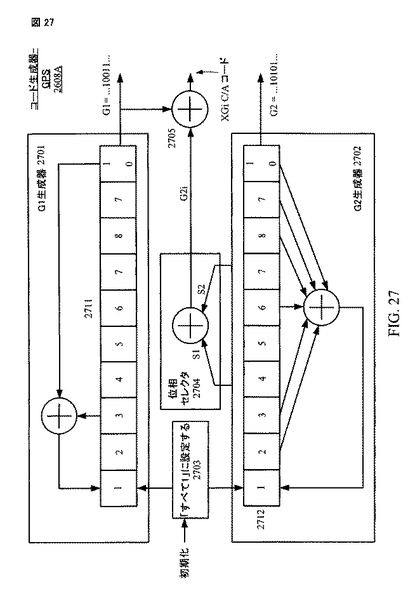
【図28】
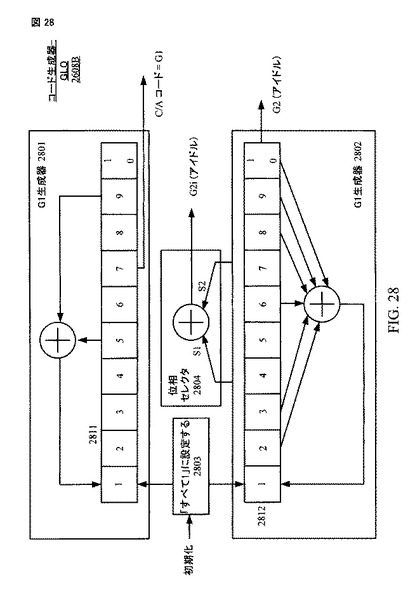
【図29】
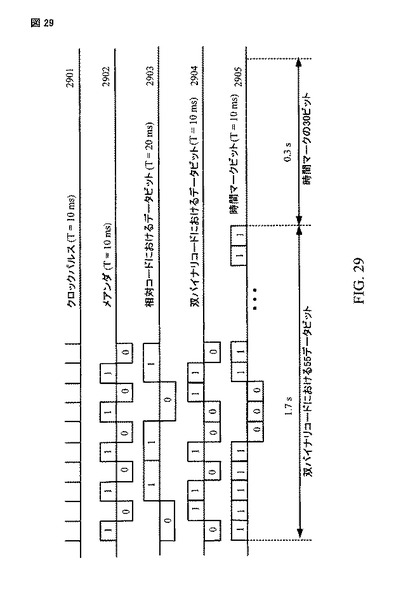
【図30】
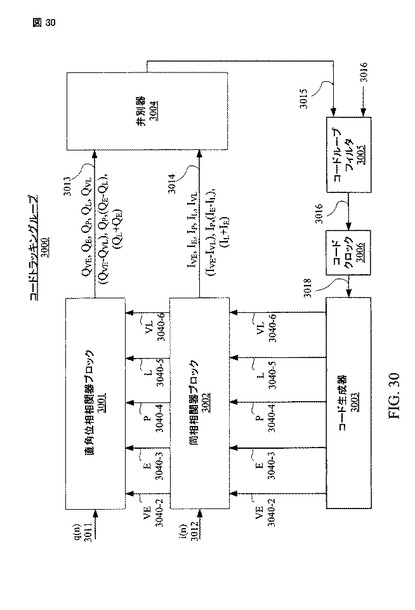
【図31】
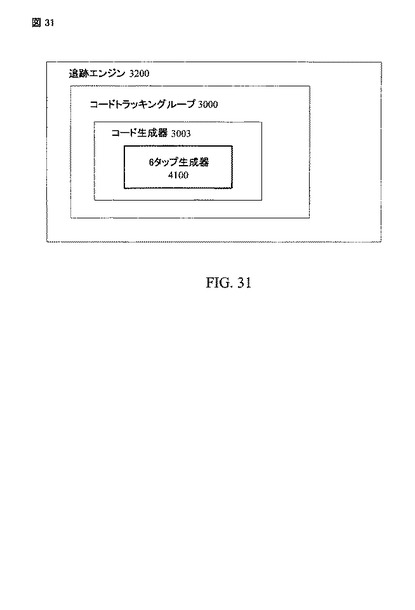
【図32】
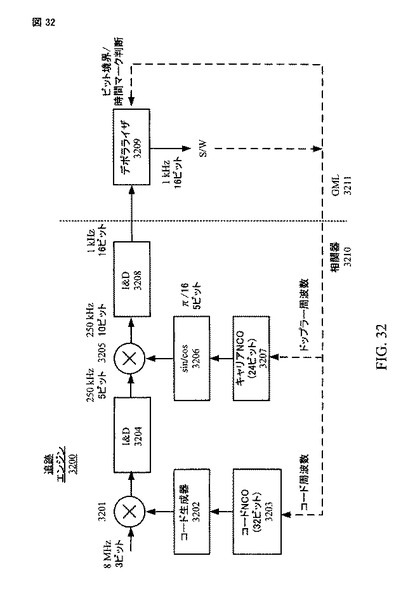
【図33】
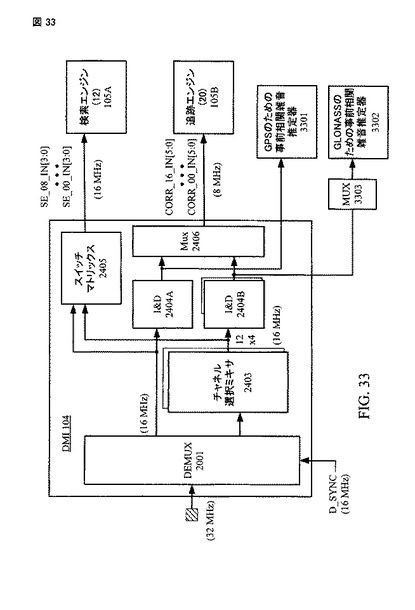
【図34】
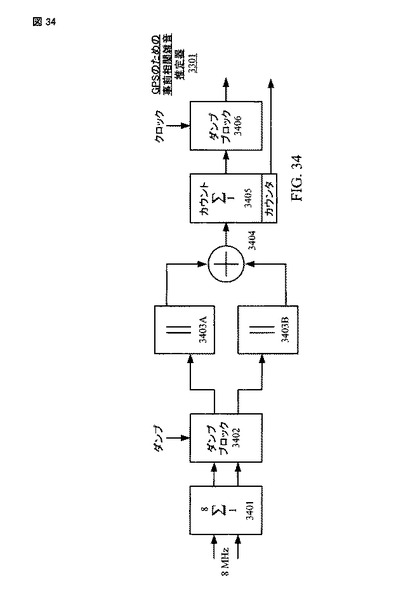
【図35】
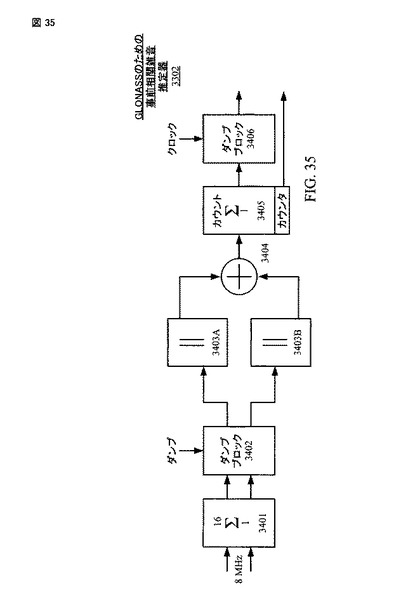
【図36】
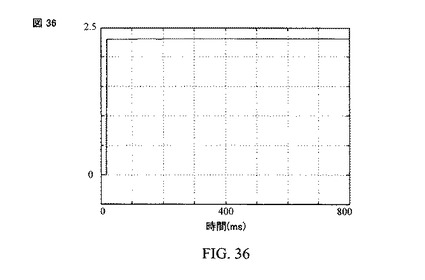
【図37】
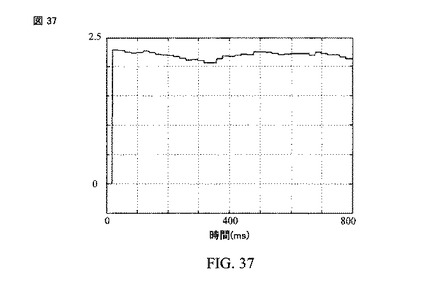
【図38】
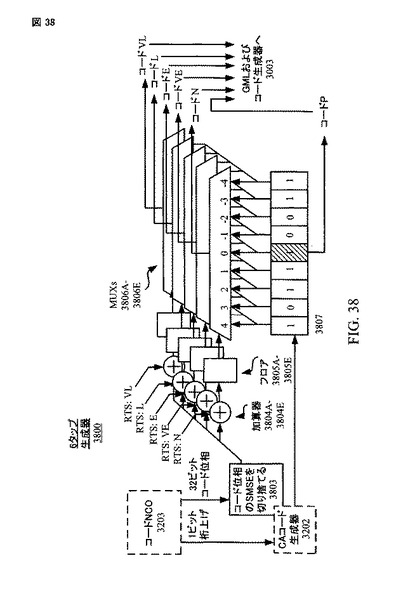
【図39】
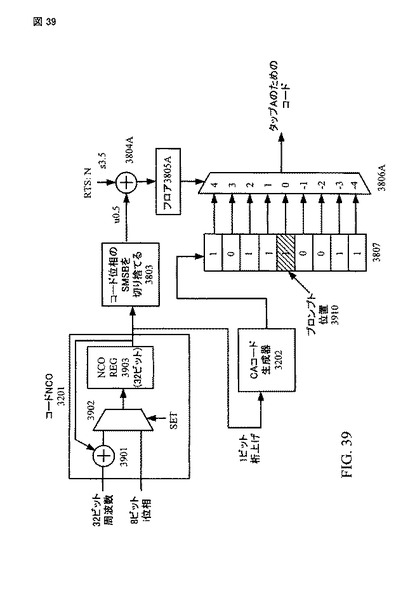
【図40】
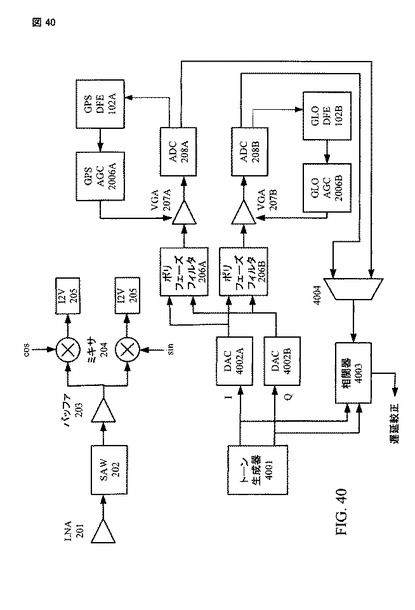
【図41】
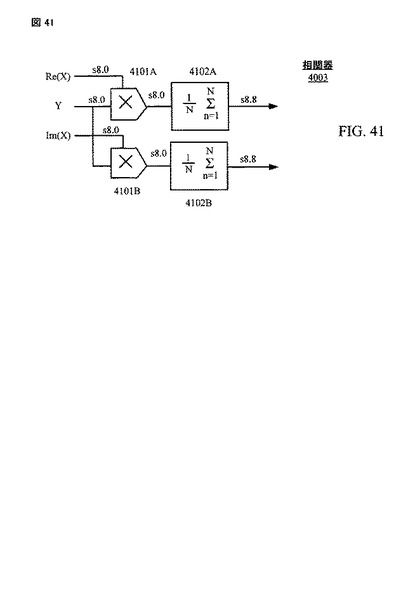
【図42】
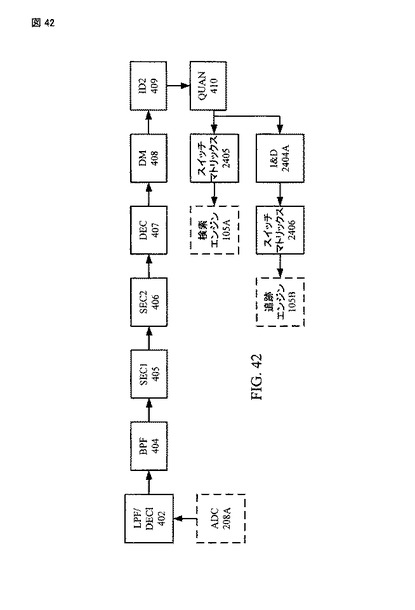
【図43】
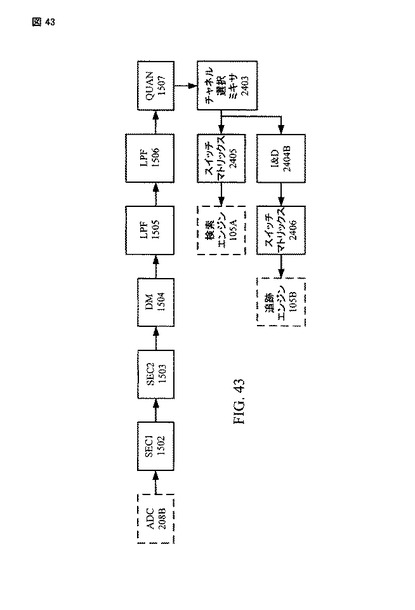
【図44】
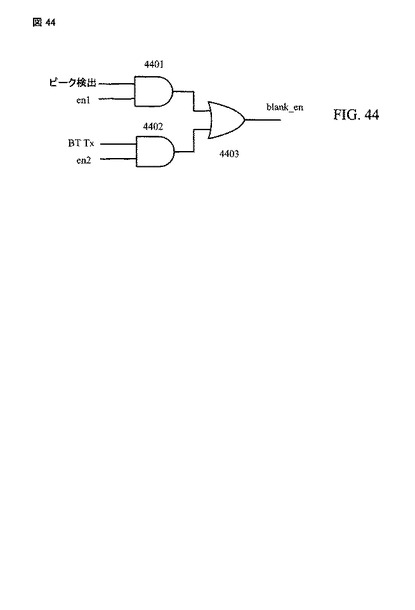
【図45】
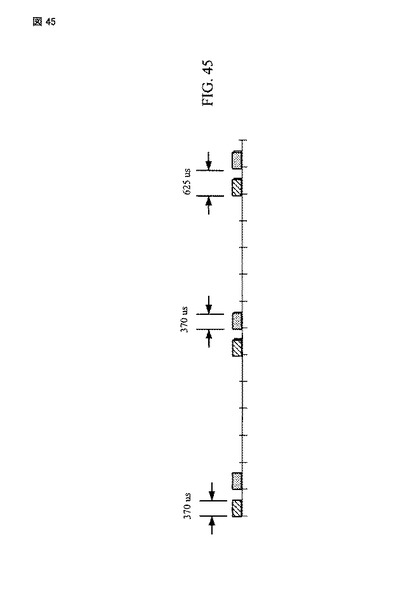
【図46】
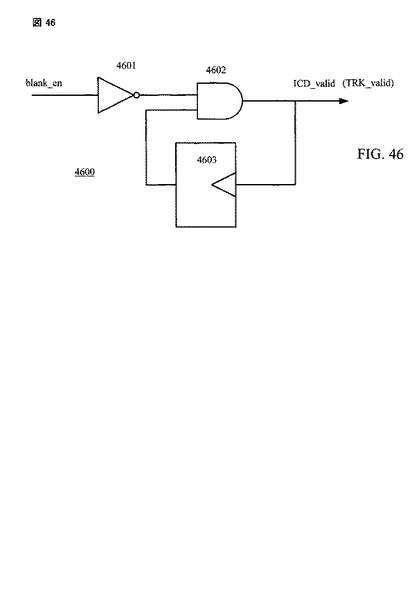
【図2A】
【図2B】
【図3A】
【図3B】
【図3C】
【図3D】
【図3E】
【図3F】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13A】
【図13B】
【図13C】
【図13D】
【図13E】
【図13F】
【図14A】
【図14B】
【図14C】
【図14D】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【公表番号】特表2013−518281(P2013−518281A)
【公表日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2012−551140(P2012−551140)
【出願日】平成22年5月4日(2010.5.4)
【国際出願番号】PCT/US2010/033634
【国際公開番号】WO2011/090497
【国際公開日】平成23年7月28日(2011.7.28)
【出願人】(500395510)クゥアルコム・アセロス・インコーポレイテッド (8)
【氏名又は名称原語表記】Qualcomm Afheros,Inc.
【Fターム(参考)】
【公表日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成22年5月4日(2010.5.4)
【国際出願番号】PCT/US2010/033634
【国際公開番号】WO2011/090497
【国際公開日】平成23年7月28日(2011.7.28)
【出願人】(500395510)クゥアルコム・アセロス・インコーポレイテッド (8)
【氏名又は名称原語表記】Qualcomm Afheros,Inc.
【Fターム(参考)】
[ Back to top ]