
GPS信号による移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラム
【課題】スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる新規な移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラムの提供。
【解決手段】ボートBTなどの移動体に少なくとも2つ以上のGPS信号部A1、A2を備え、それらで検出されたボートBTの各位置測定点の位置を検出するようにしたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信部A1、A2で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートBTの姿勢および位置を正確且つ容易にコントロールすることができる。
【解決手段】ボートBTなどの移動体に少なくとも2つ以上のGPS信号部A1、A2を備え、それらで検出されたボートBTの各位置測定点の位置を検出するようにしたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信部A1、A2で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートBTの姿勢および位置を正確且つ容易にコントロールすることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GPS(全地球測位装置)衛星が発するGPS信号を移動体がこれを受信し、その受信信号によって移動体を制御する移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラムに関するものである。
【背景技術】
【0002】
GPS信号を利用した移動体位置決定装置は、船舶や航空機用のナビゲーション装置の他に、カーナビゲーション装置や携帯型ナビゲーション装置などとして広く普及しており、現在の情報化社会にとって欠かせないものとなってきている。
【0003】
従来のナビゲーション装置による移動体の現在位置は、受信したGPS信号に基づいて所定の時間ごと、例えば1secごとに計算して液晶モニターなどに出力して表示している。しかし、このGPS信号は大気の状態や環境などによって刻々と変化するため、算出された現在位置は、移動体が停止している状態であっても数十cm〜数十メートル程度の誤差が生じることがある。
【0004】
このようなGPS信号による位置測定誤差を解消するために従来から様々な方法が用いられている。例えば、以下の特許文献1などでは、地図データ上に道路情報などのベクトルデータを重ね合わせ、このベクトルデータ上に現在位置を強制的にマッチングするといった、いわゆるマップマッチングと称される方法を用いることで測定誤差を解消する方法が開示されている。
【0005】
また、以下の特許文献2などでは、自動車などの移動体に加速度センサやジャイロスコープなどのセンサを搭載してこれらのセンサからの出力を用いたり、タイヤの回転に伴う車速信号などを用いることでGPS信号による位置測定誤差を解消する方法が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平8−50025号公報
【特許文献2】特開平11−94570号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、海洋で釣り(海釣り)を行う場合には、狙いの魚が集まるポイントとなる海域まで小型船舶やボートなど(以下「ボート」という)で移動し、そのボートに乗りながら釣り糸を海中に垂らして魚が食いつくのを待つものであるが、このような海釣りには、大きく分けてポイント固定と流し釣りの2種類がある。ポイント固定とは、海底のポイントに対してボートを固定(アンカリング)した状態で行う釣りのことであり、流し釣りとは、ボートを一箇所に固定せずに潮の流れに任せてポイント上を何度も移動しながら行う釣りのことである。
【0008】
これらの海釣りは、潮の流れだけでなく風の影響も受けるため、風向きによっては船体が傾いたり回転してしまい、その結果、海中の釣り糸が絡まったり、ポイントの位置を見失ってしまうことがある。そのため、これらの海釣り用のボートの船尾などにはスパンカーと称される小型の帆が設けられており、このスパンカーによって風に対するボートの姿勢を安定させるようにしている。
【0009】
しかし、スパンカーを装備していてもボートは風で押されて流されるため、ステアリング操作とボートの推力調整をしてボートの位置を常にコントロールしなければならない。また、風向きが変わるごとにスパンカーの向きを調整して船体の姿勢を保たなければなければならず、その操作は困難で煩わしいという問題がある。
【0010】
そこで、本発明はこれらの課題を解決するために案出されたものであり、その主たる目的は、スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる新規な移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラムを提供するものである。
【0011】
前記課題を解決するために第1の発明は、
人工衛星から発信されるGPS信号に基づいて移動体を制御する移動体制御装置であって、前記移動体の第1の位置測定点に取り付けられて前記GPS信号を連続的に受信する第1のGPS信号受信手段と、前記移動体に前記第1の位置測定点よりも所定距離離れた第2の位置測定点に取り付けられて前記GPS信号を連続的に受信する第2のGPS信号受信手段と、当該第1および第2のGPS信号受信手段で受信したGPS信号に基づいて所定時間ごとに前記移動体の第1および第2の位置測定点を算定する位置算定手段と、当該位置算定手段で算定された所定時間ごとの前記各位置測定点の算定位置を記憶する算定位置記憶手段と、当該算定位置記憶手段で記憶された前記各位置測定点ごとの算定位置同士の広がり具合に基づいて前記各位置測定点の停止または移動を判断する移動判断手段と、当該移動判断手段で前記各位置測定点が移動したと判断したときに前記各位置測定点の位置を決定する位置決定手段と、当該位置決定手段で決定された前記各位置測定点の位置に基づいて前記移動体の姿勢および位置を検出する姿勢検出手段と、当該姿勢検出手段で検出した前記移動体の姿勢および位置に基づいて前記移動体の姿勢および位置を任意に制御する移動体制御手段と、を備えたことを特徴とする移動体制御装置である。
【0012】
このような構成によれば、ボートなどの移動体に少なくとも2つ以上のGPS信号受信手段を備えたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信手段で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる。
【0013】
第2の発明は、
第1の発明において、前記移動判断手段は、前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径内であるときは前記位置測定点が停止していると判断し、前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径を外れたときに前記位置測定点が移動したと判断することを特徴とする移動体制御装置である。
【0014】
このような構成によれば、移動体の移動、停止を正確に判断することができる。すなわち、GPS信号は大気の影響などによって微妙に変化するため、一定の場所に停止していたとしても測定ごとに値がばらついてしまい、停止しているか動いているかの判断が難しい。そのため、本発明のように記憶された所定の算定位置と基準算定位置からの所定半径との関係を見ることによって移動体が移動しているか停止しているかを正確に判断することができる。
【0015】
第3の発明は、
第2の発明において、前記移動判断手段は、前記算定位置記憶手段で前記位置測定点が移動したと判断したときは、その判断の基準となった前記位置測定点の算定位置を前記基準算定位置として前記移動体の移動または停止を順に判断することを特徴とする移動体制御装置である。
【0016】
このような構成によれば、移動体の移動、停止を連続して判断できると共にその移動軌跡も把握することができる。
【0017】
第4の発明は、
第2または第3の発明において、前記移動判断手段における前記基準算定位置から所定半径は、前記GPS信号受信の際のHDOPの値に基づいて決定することを特徴とする移動体制御装置である。このようにすれば、刻々と変化するHDOPの値に応じた適切な所定半径を算出できるため、より正確な移動判断を行うことができる。
【0018】
ここで、このHDOP(Horizontal Dilution of Precision:水平成分の位置精度劣化度)とは、周知の通り衛星の幾何学的配置を指数化した位置精度劣化度(PDOP:Position Dilution of Precision)のうち、水平成分の位置精度劣化度を示したものである。この値が小さければ算定位置の精度が高く、大きければ算定位置の精度が低いことを示している。
【0019】
つまり、上空に衛星が分散している状態のとき、PDOPの値は小さくなる。逆に、衛星が1箇所に固まっていたり直線上になっていたりすると、PDOPの値は大きくなることが知られている。そして、PDOPの水平成分、垂直成分だけを指数化したものが、それぞれHDOP(Horizontal Dilution of Precision)とVDOP(Vertical Dilution of Precision:垂直成分の位置精度劣化度)である。衛星配置とHDOP、VDOPとは相反する関係となっており、中低仰角方向の異なった方位に複数の衛星が配置されているときにVDOPの値が小さくなり、天頂方向に衛星が複数あるときにHDOPの値が小さくなる。
【0020】
これらPDOP、HDOP、VDOPの間には、PDOP2=HDOP2+VDOP2の関係があるため、HDOP、VDOPの値が小さいときにPDOPの値も小さくなる。従って、天頂方向と中低仰角方向の異なった方位に複数の衛星が配置されているときにPDOPの値が小さくなるといえる。一般的にはPDOPの値が3以下のときは位置の精度が良好であり、3〜7では許容範囲、7以上では精度が悪いと考えられる。
【0021】
本発明においては、前述したようにPDOPのうち、水平成分の位置精度劣化度であるHDOPを採用する。これは、位置決定のための計算に要する負荷を軽減するためであるが、このHDOPと共にVDOPを採用しても良い。但し、VDOPのみでは水平方向への正確な移動判断ができないため、HDOPは常に用いる必要がある。
【0022】
第5の発明は、
第2乃至第4の発明において、前記移動判断手段における前記基準算定位置から所定半径は、最尤法(Maximum likelihood estimation)により決定することを特徴とする移動体制御装置である。
【0023】
このように前記移動判断手段における前記基準算定位置から所定半径を、最尤法(Maximum likelihood estimation)によって決定すれば、HDOPの値に応じた最適な所定半径を算出できるため、より正確な移動判断を行うことができる。ここで、この最尤法(Maximum likelihood estimation)とは、統計学において与えられたデータからそれが従う確率分布の母数について推測するためによく用いられる方法であり、尤度の概念を利用するものである。なお、この最尤法(Maximum likelihood estimation)を用いた具体例については後に詳述する。
【0024】
第6の発明は、
第1乃至第5の発明において、前記移動体は船体であり、移動体制御手段は、前記船体の船首側に設けられたサイドスラスターを有することを特徴とする移動体制御装置である。このような構成によれば、舵とスクリューだけでは実現できないか、実現に困難が伴う船体に横方向の動きを与えることができるため、容易且つ正確に船体の姿勢および位置を制御することができる。
【0025】
第7の発明は、
第1乃至第6のいずれかの発明において、前記移動体は船体であり、移動体制御手段は、前記船体の船尾に設けられてそれぞれ独立して駆動する2軸の推力スクリューを有することを特徴とする移動体制御装置である。このような構成によれば、2軸の推力スクリューをそれぞれ独立して駆動することにより、狭い領域で容易且つ正確に船体の姿勢および位置を制御することができる。
【0026】
第8の発明は、
互いに通信可能な移動局と基地局とを有する移動局管理システムであって、前記移動局は、前記請求項1乃至5のいずれかの移動体制御装置と、前記基地局と通信する通信手段を備え、前記基地局は、人工衛星から発信されるGPS信号を地上の固定点で受信するGPS信号受信手段と、当該GPS信号受信手段で受信したGPS信号に基づいて当該基地局の位置を算出する位置算出手段と、当該位置算出手段で算出した当該基地局の計算位置と実際の位置との誤差値を算出する誤差計算手段と、当該誤差計算手段で算出した誤差値を前記基地局に送信する通信手段とを備え、前記移動局の移動体制御装置は、前記基地局に送信された誤差値に基づいて前記位置決定手段で決定した前記各位置測定点の位置を修正することを特徴とする移動局管理システムである。
【0027】
このような構成によれば、その移動局のGPS測定値に誤差が生じていてもその誤差が基地局から移動局に知らせることができるため、移動局はその誤差を考慮した正確な位置を求めることができる。
【0028】
第9の発明は、
第8の発明において、前記移動局の移動体制御装置は、前記移動局で受信したGPS信号の識別情報を前記通信手段によって前記基地局に送信し、前記基地局または前記移動局の位置算出手段は、前記基地局で受信したGPS信号のうち、前記移動局で受信したGPS信号と共通するGPS信号に基づいて前記誤差値を算出することを特徴とする移動局管理システムである。
【0029】
このような構成によれば、移動局と基地局とが離れていたりして相互に受信するGPS信号が一部異なっている場合でも、正確な誤差を算出して移動局に知らせることができる。つまり、移動局と基地局とが離れていたりして相互に受信するGPS信号が一部異なっている場合には、基地局での測定誤差と移動局での測定誤差が大きく異なることがある。この場合に、そのまま基地局での測定誤差を移動局に送っても正確な位置を求めることができないが、本発明のように共通するGPS信号に基づいて基地局の位置を算出すれば正確な誤差を移動局に知らせることができる。
【0030】
第10の発明は、
第8または第9の発明において、前記基地局は、前記移動局の要求に応じて所定の地図情報を当該移動局に提供する地図情報提供手段をさらに備えていることを特徴とする移動局管理システムである。このような構成によれば、移動局は地図情報を持つ必要がなくなり、また、常に最新の地図情報を基地局から取得することができる。
【0031】
第11の発明は、
人工衛星から発信されるGPS信号に基づいて移動体を制御する移動体制御方法であって、前記移動体の第1の位置測定点に取り付けられた第1の第1のGPSアンテナによって前記GPS信号を連続的に受信する第1のGPS信号受信ステップと、前記移動体に前記第1の位置測定点よりも所定距離離れた第2の位置測定点に取り付けられた第2のGPSアンテナによって前記GPS信号を連続的に受信する第2のGPS信号受信ステップと、当該第1および第2のGPS信号受信ステップで受信したGPS信号に基づいて所定時間ごとに前記移動体の第1および第2の位置測定点を算定する位置算定ステップと、当該位置算定ステップで算定された所定時間ごとの前記各位置測定点の算定位置を記憶する算定位置記憶ステップと、当該算定位置記憶ステップで記憶された前記各位置測定点ごとの算定位置同士の広がり具合に基づいて前記各位置測定点の停止または移動を判断する移動判断ステップと、当該移動判断ステップで前記各位置測定点が移動したと判断したときに前記各位置測定点の位置を決定する位置決定ステップと、当該位置決定ステップで決定された前記各位置測定点の位置に基づいて前記移動体の姿勢および位置を検出する姿勢検出ステップと、当該姿勢検出ステップで検出した前記移動体の姿勢および位置に基づいて前記移動体の姿勢および位置を任意に制御する移動体制御ステップと、を含むことを特徴とする移動体制御方法である。
【0032】
このような方法によれば、ボートなどの移動体に少なくとも2つ以上のGPS信号受信手段を備えたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信手段で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる。
【0033】
第12の発明は、
第11の発明において、前記移動判断ステップでは、前記算定位置記憶ステップで記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径内であるときは前記位置測定点が停止していると判断し、前記算定位置記憶ステップで記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径を外れたときに前記位置測定点が移動したと判断することを特徴とする移動体制御方法である。
【0034】
このような方法であれば、移動体の移動、停止を正確に判断することができる。すなわち、GPS信号は大気の影響などによって微妙に変化するため、一定の場所に停止していたとしても測定ごとに値がばらついてしまい、停止しているか動いているかの判断が難しい。そのため、本発明のように記憶された所定の算定位置と基準算定位置からの所定半径との関係を見ることによって移動体が移動しているか停止しているかを正確に判断することができる。
【0035】
第13の発明は、
第12の発明において、前記移動判断ステップでは、前記算定位置記憶ステップで前記位置測定点が移動したと判断したときは、その判断の基準となった前記位置測定点の算定位置を前記基準算定位置として前記移動体の移動または停止を順に判断することを特徴とする移動体制御方法である。
【0036】
このような方法によれば、第3の発明と同様に移動体の移動、停止を連続して判断できると共にその移動軌跡も把握することができる。
【0037】
第14の発明は、
第12または第13の発明において、前記移動判断ステップにおける前記基準算定位置から所定半径は、前記GPS信号受信の際のHDOPの値に基づいて決定することを特徴とする移動体制御方法である。このようにすれば、刻々と変化するHDOPの値に応じた適切な所定半径を算出できるため、より正確な移動判断を行うことができる。
【0038】
第15の発明は、
第11乃至第14の発明において、前記移動判断手段における前記基準算定位置から所定半径は、最尤法(Maximum likelihood estimation)により決定することを特徴とする移動体制御方法である。このようにすれば、HDOPの値に応じた最適な所定半径を算出できるため、より正確な移動判断を行うことができる。
【0039】
第16の発明は、
互いに通信可能な移動局と基地局とを有する移動局管理方法であって、前記移動局は、前記請求項1乃至5のいずれかの移動体制御装置と、前記基地局と通信する通信手段を備え、前記基地局は、人工衛星から発信されるGPS信号を地上の固定点で受信するGPS信号受信ステップと、当該GPS信号受信ステップで受信したGPS信号に基づいて当該基地局の位置を算出する位置算出ステップと、当該位置算出ステップで算出した当該基地局の計算位置と実際の位置との誤差値を算出する誤差計算ステップと、当該誤差計算ステップで算出した誤差値を前記基地局に送信する通信ステップとを備え、前記移動局の移動体制御装置は、前記基地局に送信された誤差値に基づいて前記位置決定手段で決定した前記各位置測定点の位置を修正することを特徴とする移動局管理方法である。
【0040】
このような方法によれば、その移動局のGPS測定値に誤差が生じていてもその誤差を基地局から移動局に知らせることができるため、移動局はその誤差を考慮した正確な位置を求めることができる。
【0041】
第17の発明は、
第16の発明において、前記移動局の移動体制御装置は、前記移動局で受信したGPS信号の識別情報を前記通信手段によって前記基地局に送信し、前記基地局または移動局の位置算出ステップでは、前記基地局で受信したGPS信号のうち、前記移動局で受信したGPS信号と共通するGPS信号に基づいて前記誤差値を算出することを特徴とする移動局管理方法である。
【0042】
このような方法によれば、移動局と基地局とが離れていたりして相互に受信するGPS信号が一部異なっている場合でも、正確な誤差を算出して移動局に知らせることができる。
【0043】
第18の発明は、
第16または第17の発明において、前記基地局は、前記移動局の要求に応じて所定の地図情報を当該移動局に提供することを特徴とする移動局管理方法である。このような方法によれば、移動局は地図情報を持つ必要がなくなり、また、常に最新の地図情報を基地局から取得することができる。
【0044】
第19の発明は、
人工衛星から発信されるGPS信号に基づいて移動体を制御する移動体制御プログラムであって、コンピュータを、前記移動体の第1の位置測定点に取り付けられて前記GPS信号を連続的に受信する第1のGPS信号受信手段と、前記移動体に前記第1の位置測定点よりも所定距離離れた第2の位置測定点に取り付けられて前記GPS信号を連続的に受信する第2のGPS信号受信手段と、当該第1および第2のGPS信号受信手段で受信したGPS信号に基づいて所定時間ごとに前記移動体の第1および第2の位置測定点を算定する位置算定手段と、当該位置算定手段で算定された所定時間ごとの前記各位置測定点の算定位置を記憶する算定位置記憶手段と、当該算定位置記憶手段で記憶された前記各位置測定点ごとの算定位置同士の広がり具合に基づいて前記各位置測定点の停止または移動を判断する移動判断手段と、当該移動判断手段で前記各位置測定点が移動したと判断したときに前記各位置測定点の位置を決定する位置決定手段と、当該位置決定手段で決定された前記各位置測定点の位置に基づいて前記移動体の姿勢および位置を検出する姿勢検出手段と、当該姿勢検出手段で検出した前記移動体の姿勢および位置に基づいて前記移動体の姿勢および位置を任意に制御する移動体制御手段と、して機能させることを特徴とする移動体制御プログラムである。
【0045】
このようなプログラムによれば、ボートなどの移動体に少なくとも2つ以上のGPS信号受信手段を備えたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信手段で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる。
【0046】
第20の発明は、
第18の発明において、前記コンピュータで機能する前記移動判断手段は、前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径内であるときは前記位置測定点が停止していると判断し、前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径を外れたときに前記位置測定点が移動したと判断することを特徴とする移動体制御プログラムである。このようなプログラムによれば、移動体の移動、停止を正確に判断することができる。
【0047】
第21の発明は、
第20の発明において、前記コンピュータで機能する前記移動判断手段は、前記算定位置記憶手段で前記位置測定点が移動したと判断したときは、その判断の基準となった前記位置測定点の算定位置を前記基準算定位置として前記移動体の移動または停止を順に判断することを特徴とする移動体制御プログラムである。このようなプログラムによれば、移動体の移動、停止を連続して判断できると共にその移動軌跡も把握することができる。
【0048】
第22の発明は、
第20または21の発明において、前記移動判断手段における前記基準算定位置から所定半径は、前記GPS信号受信の際のHDOPの値に基づいて決定することを特徴とする移動体制御プログラムである。このようなプログラムによれば、刻々と変化するHDOPの値に応じた適切な所定半径を算出できるため、より正確な移動判断を行うことができる。
【0049】
第23の発明は、
第20乃至第22の発明において、前記移動判断手段における前記基準算定位置から所定半径は、最尤法(Maximum likelihood estimation)により決定することを特徴とする移動体制御プログラムである。このようにすれば、HDOPの値に応じた最適な所定半径を算出できるため、より正確な移動判断を行うことができる。
【0050】
第24の発明は、
互いに通信可能な移動局と基地局とを有する移動局管理プログラムであって、前記移動局のコンピュータを、前記請求項1乃至5のいずれかの移動体制御装置と、前記基地局と通信する通信手段として機能させ、前記基地局のコンピュータを、人工衛星から発信されるGPS信号を地上の固定点で受信するGPS信号受信手段と、当該GPS信号受信手段で受信したGPS信号に基づいて当該基地局の位置を算出する位置算出手段と、当該位置算出手段で算出した当該基地局の計算位置と実際の位置との誤差値を算出する誤差計算手段と、当該誤差計算手段で算出した誤差値を前記基地局に送信する通信手段として機能させ、前記移動局の移動体制御装置を、前記基地局に送信された誤差値に基づいて前記位置決定手段で決定した前記各位置測定点の位置を修正するように機能させることを特徴とする移動局管理プログラムである。
【0051】
このようなプログラムによれば、その移動局のGPS測定値に誤差が生じていてもその誤差を基地局から移動局に知らせることができるため、移動局はその誤差を考慮した正確な位置を求めることができる。
【0052】
第25の発明は、
第24の発明において、前記移動局の移動体制御装置を、前記移動局で受信したGPS信号の識別情報を前記通信手段によって前記基地局に送信するように機能させ、前記基地局または前記移動局の位置算出手段を、前記基地局で受信したGPS信号のうち、前記移動局で受信したGPS信号と共通するGPS信号に基づいて前記誤差値を算出するように機能させることを特徴とする移動局管理プログラムである。
【0053】
このようなプログラムによれば、移動局と基地局とが離れていたりして相互に受信するGPS信号が一部異なっている場合でも、正確な誤差を算出して移動局に知らせることができる。
【0054】
第26の発明は、
第24または第25の発明において、前記基地局は、前記移動局の要求に応じて所定の地図情報を当該移動局に提供することを特徴とする移動局管理方法である。このような方法によれば、移動局は地図情報を持つ必要がなくなり、また、常に最新の地図情報を基地局から取得することができる。
【発明の効果】
【0055】
本発明によれば、ボートなどの移動体に少なくとも2つ以上のGPS信号受信手段を備えたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信手段で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできるなどといった優れた効果を発揮できる。
【図面の簡単な説明】
【0056】
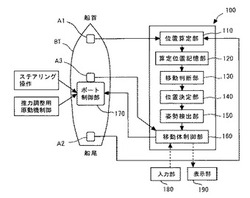
【図1】本発明に係る移動体制御装置100の実施の一形態を示す全体ブロック図である。
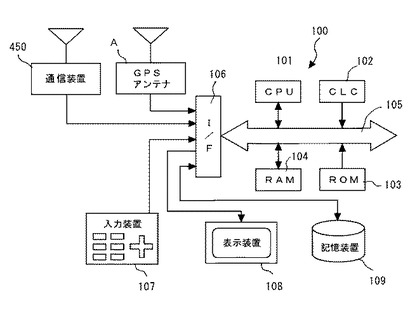
【図2】本発明に係る移動体制御装置100を構成するハードウェア構成図である。
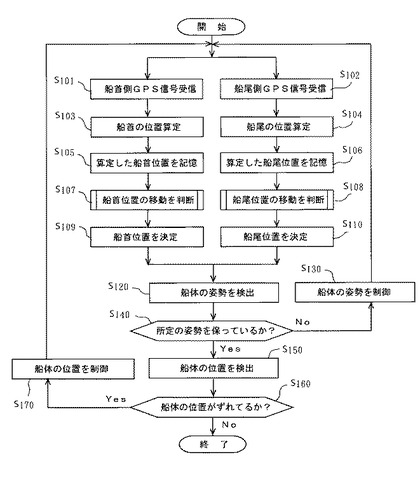
【図3】本発明に係る移動体位置決定方法の流れを示すフローチャート図である。
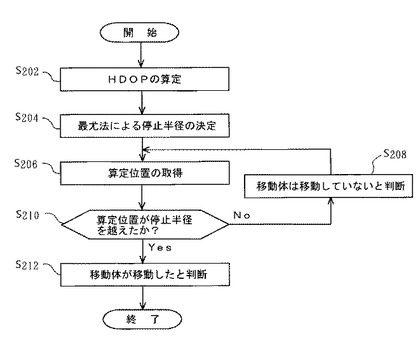
【図4】図3のステップS107およびS108(移動判断処理)の詳細な流れを示すフローチャート図である。
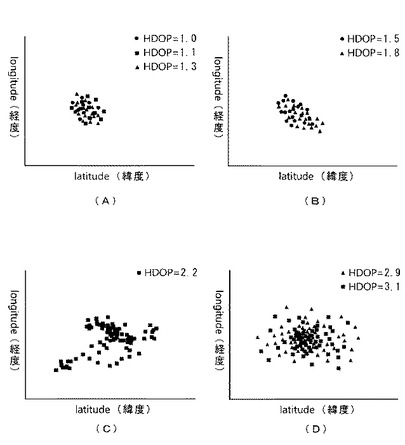
【図5】HDOPと算定された移動体の現在位置との関係を示す図である。
【図6】HDOPと停止半径との関係を示す図である。
【図7】HDOPと算定位置数および停止半径中心を示す正規分布図である。
【図8】潮流とボートBT(移動体)との関係を示す模式図である。
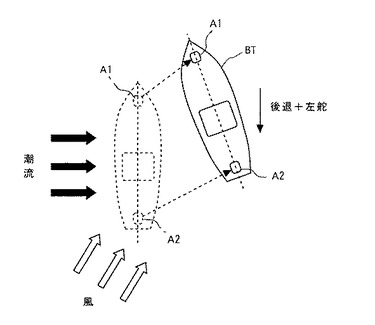
【図9】潮流および風とボートBT(移動体)との関係を示す模式図である。
【図10】潮流とボートBT(移動体)との関係を示す模式図である。
【図11】潮流および風とボートBT(移動体)との関係を示す模式図である。
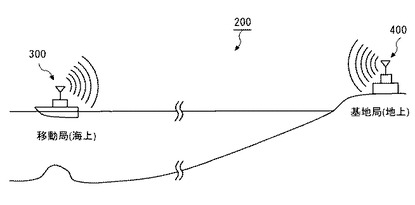
【図12】本発明の移動局管理システム200の実施の一形態を示す概念図である。
【図13】本発明の移動局管理システム200の移動局300を構成するブロック図である。
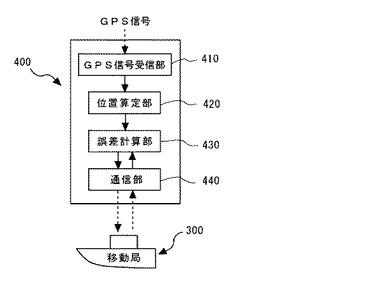
【図14】本発明の移動局管理システム200の基地局400を構成するブロック図である。
【図15】基地局400を構成するハードウェア構成図である。第2の実施形態に係る図3のステップS400(移動体判断処理)の詳細な流れを示すフローチャート図である。
【図16】移動局300の位置決定方法の流れを示すフローチャート図である。
【図17】本発明の移動局管理システム200による処理の一例を示すフローチャート図である。
【図18】移動体制御手段としてサイドスラスターと2軸の推進スクリューとを有するボートBT(移動体)の動き(旋回)の一例を示した模式図である。
【図19】移動体制御手段としてサイドスラスターと2軸の推進スクリューとを有するボートBT(移動体)の動き(右回転)の一例を示した模式図である。
【図20】移動体制御手段としてサイドスラスターと2軸の推進スクリューとを有するボートBT(移動体)の動き(左回転)の一例を示した模式図である。
【図21】移動体制御手段としてサイドスラスターと2軸の推進スクリューとを有するボートBT(移動体)の動き(横移動)の一例を示した模式図である。
【発明を実施するための形態】
【0057】
次に、本発明の実施の形態を添付図面を参照しながら説明する。
【0058】
図1乃至図11は、本発明に係る移動体制御装置100の第1の実施形態を示したものである。図1に示すようにこの移動体制御装置100は、移動体の一つであるボートBTなどに搭載されて用いられるものであり、第1のGPS受信部A1と、第2のGPS受信部A2と、位置算定部110と、算定位置記憶部120と、移動判断部130と、位置決定部140と、姿勢検出部150と、移動体制御部160と、ボート制御部170、入力部180および表示部190とから主に構成されている。
【0059】
GPS受信部A1は、公知のGPSアンテナなどから構成されており、ボートBTの船首(Bow:第1の位置測定点)側に固定されて、その天空上に位置する複数のGPS(Global Positioning System)衛星からそれぞれ発信される、その位置情報と時刻情報とを含むGPS信号を受信してその受信したGPS信号を位置算定部110に入力する機能を有する。
【0060】
また、GPS受信部A2も同じく公知のGPSアンテナなどから構成されており、ボートBTの船尾(Stern:第2の位置測定点)側に固定されて、その天空上に位置する複数のGPS(Global Positioning System)衛星からそれぞれ発信される、その位置情報と時刻情報とを含むGPS信号を受信してその受信したGPS信号を位置算定部110に入力する機能を有する。
【0061】
位置算定部110は、これら各々のGPS受信部A1およびA2で受信したGPS信号に基づいて、一定時間間隔ごと(例えば、1秒ごと)に海面上における、そのボートBTの船首および船尾の現在位置(経度、緯度)を計算し、計算し終えると一定のフォーマット(例えば、NMEA0183仕様)で算定位置記憶部120に出力する機能を有する。なお、この位置算定部110によるボートBTの船首および船尾の現在位置の算定方法は、従来公知の方法そのものを用いたものである。なお、後述するように一般に海面上のボートBTは、その周囲にGPS信号を遮る建造物や樹木などが無いため、GPS受信部A1およびA2におけるHDOP(Horizontal Dilution of Precision:水平成分の位置精度劣化度)が小さくなり、高精度(数十cm〜数m程度)の位置測定が可能となる。
【0062】
ここで、この位置算定部110で算定される一定時間間隔ごとの各々の位置情報(ボートBTの船首および船尾の現在位置)は、GPS衛星からの信号伝播経路と空間媒体の物理定数の変化によりボートBTが停止していても毎回異なる。また、この位置情報はGPS衛星の天空上での分散状態でも異なる。そのため、この位置算定部110は、受信したGPS信号の発信元であるGPS衛星の分散度から位置精度劣化度(PDOP:Position Dilution of Precision)のうち、主に水平成分の位置精度劣化度を示したHDOP(Horizontal Dilution of Precision)も同時に算定する機能を有する。
【0063】
算定位置記憶部120は、この位置算定部110によって所定時間ごとに各々算定されるボートBTの船首および船尾の現在位置を所定数、所定時間記憶し、記憶した位置情報を移動判断部130に出力する機能を有する。
【0064】
移動判断部130は、前記算定位置記憶部120で記憶したボートBTの船首および船尾の位置情報を用い、後述する最尤法によりそのボートBTの船首および船尾の移動および停止を判断する機能を有する。
【0065】
位置決定部140は、前記移動判断部130でボートBTの船首および船尾の位置が移動したと判断したときに、同じく後述する最尤法によりボートBTの船首および船尾の位置を決定する機能を有する。
【0066】
姿勢検出部150は、前記位置決定部140で決定されたボートBTの船首および船尾の位置に基づいてそのボートBTの姿勢(向き)および位置を検出する機能を有する。すなわち、ボートBTの船首および船尾の位置関係を把握することでボートBTがどの方向を向いているのかなどを正確に検出可能となっている。
【0067】
移動体制御部160は、姿勢検出部150で検出したボートBTの姿勢および位置に基づいてそのボートBTの姿勢および位置を直接制御するボート制御部170を制御する機能を有する。
【0068】
ボート制御部170は、移動体制御部160からの制御信号に基づいてボートBTのステアリング操作や推力調整用原動機を制御してボートBTの姿勢および位置を直接制御する機能を有する。
【0069】
入力部180は、利用者による各種操作、例えば電源入断や表示の切り替え、表示画面の拡縮、表示設定などの各種操作を行う操作手段(操作ボタンなど)から構成されている。
【0070】
表示部190は、液晶ディスプレイなどの視認可能な表示画面を備えており、主に前記位置決定部140で決定されたボートBTの位置、および姿勢検出部150で検出したボートBTの姿勢(向き)を利用者が視認可能な画像情報などとして表示画面上に表示する機能を有する。なお、この位置表示部80は、ボートBTの位置などと同時に地図(海図)なども表示可能となっている。
【0071】
このような機能を有する本発明の移動体制御装置100は、具体的には図2に示すように電子計算機(コンピュータ:情報処理システム)を中心に構成されており、CPU(演算装置)101、CLC(クロック)102、ROM(読出専用メモリ)103、RAM(主記憶装置)104、バス105、I/F(入出力インターフェース)106、入力装置107、表示装置108、外部記憶装置109、第1のGPSアンテナA1、第2のGPSアンテナA2、ボート制御部170などからなるハードウェアと、ROM103に予め記録された専用の制御プログラム(ソフトウェア)とが協働することによって図1に示した各部110乃至160の機能を実現する。
【0072】
具体的には、第1のGPSアンテナA1および第2のGPSアンテナA2が図1に示す第1のGPS受信部A1および第1のGPS受信部A2に対応し、入力装置107が入力部180に対応し、表示装置108が表示部190に対応する。そして、CPU101、CLC102、ROM103、RAM104、バス105、I/F106、記憶装置109およびROM103に予め記録された専用の制御プログラム(ソフトウェア)によって図1に示す位置算定部110、算定位置記憶部120、移動判断部130、位置決定部140、姿勢検出部150、移動制御部160が実現される。
【0073】
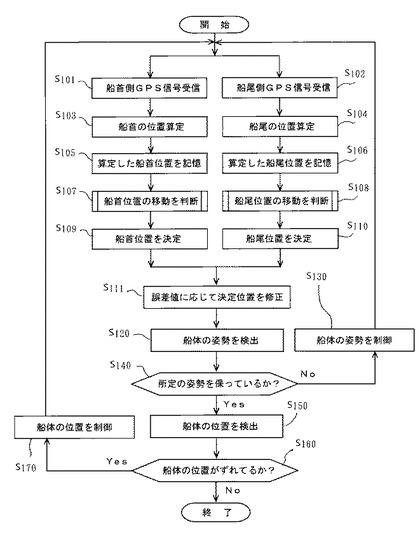
次に、このような構成をした本発明の移動体制御装置100による移動体位置決定方法を、主に図3のフローチャートを参照しながら説明する。図示するように、先ずこの移動体制御装置100(のCPU101)は、電源投入後の所定のシステムチェックが終了したならば、最初のステップS101、ステップS102に移行して第1および第2のGPSアンテナA1、A2によるGPS信号の受信処理をそれぞれ並行に実行してそれぞれ次のステップS103,S104に移行する。
【0074】
ステップS103,S104では、最初のステップS101、ステップS102でそれぞれ受信したGPS信号に基づいてボートBTの船首(第1の位置測定点)および船尾(第2の位置測定点)の現在位置を一定時間間隔ごとに計算により求め、次のステップS105、S106に移行する。ステップS105,S106では、前のステップS103,S104でそれぞれ算定したボートBTの船首および船尾の現在位置情報をそれぞれ所定時間、所定数記憶して次のステップS107、S108に移行する。ステップS107,S108では、ステップS105,S106で記憶したボートBTの船首および船尾の複数の現在位置情報に基づいてボートBTの船首および船尾が移動したか否かを判断する。
【0075】
図4は、このステップS107、S108におけるそれぞれの移動判断処理の流れを示したフローである。なお、この移動判断処理の流れは、ステップS107、S108のいずれでも同じであるからステップS107における船首(第1の位置測定点)について説明する。図示するように、最初のステップS202では受信したGPS信号からその時間帯における水平成分の位置精度劣化度であるHDOPを算定する。所定時間間隔ごとに算定される船首の現在位置に関する位置情報は、GPS衛星の天空上での分散状態でも異なることから、以下の数式1で示される分散をもっているからである。
【0076】
【数1】

ここで、xi(x=x1、x2、x3…、xn)はN(μ、σi2)、μはサンプル値、σは標準偏差値である。
上式1の対数をとると、以下の数式2となる。
【0077】
【数2】
この数式2から、μ(サンプル値)、σ(標準偏差値)は以下の数式3のようになる
【0078】
【数3】
従って、GPS衛星の分散状態をHDOPで表すと、σiがHDOPと比例関係にあるからσiは、以下の数式4のようになる。
【0079】
【数4】
【0080】
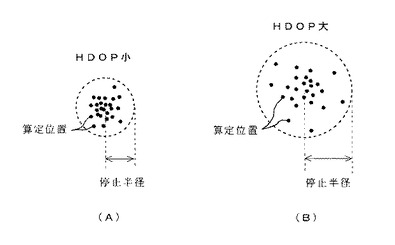
図5は、船首が停止している状態で一定時間間隔ごとに算定された複数の現在位置(緯度、経度)の集合と、HDOPとの関係を示したものである。同図(A)に示すように、HDOPが小さい(「1.0」,「1.1」,「1.3」)ときは船首の算定位置の集合の広がり具合(バラツキ)が小さいが、同図(2)から(4)に示すように、HDOPが大きくなるに従って徐々に船首の現在算定位置の集合のバラツキが大きくなっていることを示している。つまり、HDOPが小さいほど高精度の位置測定が可能となる。
【0081】
図4のフローに戻り、ステップS202においてHDOPの算定処理が行われたならば、次のステップS204に移行して最尤法(Maximum likelihood estimation)による集合の停止半径の決定を行って次のステップS206に移行する。すなわち、前記のようにボートBTの船首が停止している状態であってもHDOPの値によって算定位置の集合のバラツキが大きく異なることから、HDOPの値に基づいて算定位置の集合の中心とその中心からの標準偏差値から停止半径を決定する。この結果、図6(A)に示すようにHDOPが小さいときには停止半径は小さくなり、図6(B)に示すようにHDOPが大きいときには停止半径は大きくなる。
【0082】
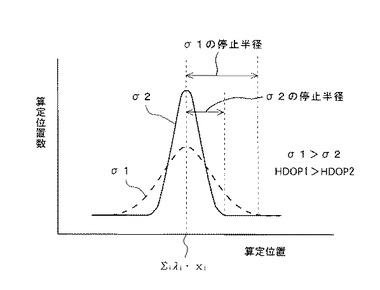
船尾が停止している状態で一定時間間隔で算定された船首の現在位置(緯度、経度)の集合の中心の値は、図7に示すようにΣiλi・xiであるから、数値計算するとHDOPの値の大小によって集合の中心からのずれが計算される。HDOPの値を考慮して集合の中心を求めると共にその中心からの標準偏差値から停止半径を決定する。図7は、所定時間内に算定された船首の算定位置とその数との関係を示した正規分布図であり、標準偏差σ1よりも小さい標準偏差σ2のほうが停止半径を小さくできることがわかる。
【0083】
ステップS206では、このようにして最尤法による停止半径が決定された後に記憶された新たな算定位置を取得して次のステップS210に移行する。
【0084】
ステップS210では、新たに取得した算定位置が決定された停止半径を超えたか否かを判断し、越えていないと判断したとき(No)は、ステップS208に移行して船首は移動していない、つまり停止した状態であると判断してステップS206に戻って次の新たな算定位置の取得を繰り返す。これに対し、取得した算定位置が決定された停止半径を超えていると判断したとき(Yes)は、次のステップS212に移行して船首は移動したと判断する。船尾の場合もこれと全く同様の処理によってその停止、移動が判断される。なお、この移動、停止は船首および船尾で一致しない場合もある。すなわち、例えば船首を中心に船尾側が回転移動した場合には、船首は停止と判断され、船尾が移動したと判断される。
【0085】
また、その停止半径の中心(Σiλi・xi)を移動前の船首の正式な位置として決定したならば、決定したその位置を表示部190の画面上に表示しても良い。この場合、この船首の位置表示方法としては、その緯度および経度を数値として表示する他に、表示部190の画面上に表示された地図(海図)上に船首の現在位置を示す点やマークなどを重ねて記すことで表示する方法の他、縦軸に経度または緯度、横軸に緯度または経度が記された画面上に同じく船首の現在位置を示す点やマークなどを記す方法でも良い。
【0086】
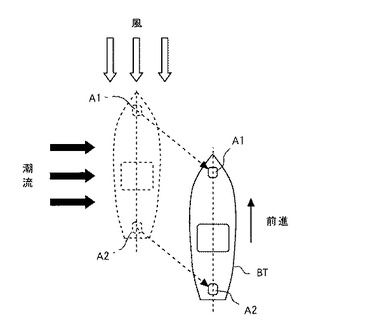
図3のフローに戻り、このようにステップS107,S108において船首および船尾の移動を判断したならば、それぞれ次のステップS109,S110に移動して船首および船尾の位置を決定して次のステップS120に移行してボートBTの船体の姿勢(向き)を検出する。すなわち、ボートBTが完全に停止してる状態は勿論、例えば図8に示すようにボートBTが潮の流れに沿って動いていても無風状態のときは、船体の姿勢(向き)は変わらない。また、図9のように風が船首方向から真っすぐ吹いているときには、潮の流れと風力とによって船体が斜め方向に移動するがその姿勢自体は変わらない。
【0087】
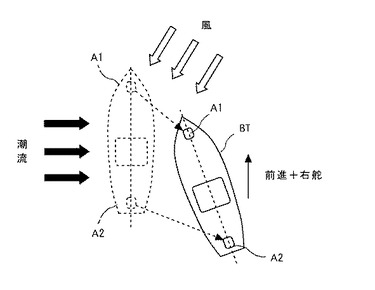
これに対し、図10や図11のように風が右斜め前方や左下後方から吹いていると、その風の影響によって船体が左斜めに傾くように姿勢が変化する。このような姿勢の変化は船首と船尾の位置関係を測定するだけで容易に把握することができる。また、前述したように海面上はHDOPが小さく測定精度が高いため、数十cm〜数mの移動も精度良く感知することができる。
【0088】
ステップS120においてボートBTの船体の姿勢(向き)を検出したならば、次のステップS140に移行し、所定の姿勢(向き)を保っているかを判断する。すなわち、例えば、流し釣りのように潮の流れに沿ってボートBTを移動する場合には、海中に垂らした釣り糸が絡み合ったりしないように、ボートBTの姿勢を一定に保つことが重要となる。また、ポイント固定の場合も船の姿勢が変わって同じく海中に垂らした釣り糸が絡み合ったりしないように、ボートBTの姿勢を一定に保つことが重要となる。
【0089】
この判断の結果、所定の姿勢(向き)を保っていないと判断した(No)とき(向きが変化したと判断したとき)は、ステップS130に移行して船体の姿勢を修正するように制御する。
【0090】
具体的には、図1に示すように姿勢制御部150からの姿勢制御信号を受けた移動制御部160がボート制御部17に対して船体の姿勢を所定の姿勢に修正する信号を送り、これを受けたボート制御部17がボートBTのステアリングや推力調整用原動機を操作、制御することで船体の姿勢の修正が行われる。なお、この姿勢修正中にもステップS101からステップS120までの処理が繰り返し行われ、所定の姿勢に修正されたか否かが判断される。
【0091】
そして、所定の姿勢(向き)を保っていると判断した(Yes)ときはステップS150に移行し、その船体の位置を検出して次のステップS160に移行する。ステップS160では、船体の位置が所定の位置よりもずれているか否かを判断し、ずれていないと判断したとき(No)はそのまま処理を終了するが、ずれていると判断したとき(Yes)は、次のステップS170に移行して船体の位置を制御する。なお、この船体の姿勢制御および位置制御は同時に行っても良い。
【0092】
例えば、図9に示すように流し釣りを行っている場合に、船体の姿勢(向き)は一定に保っているが、風の影響により、船体が船首方向より押され、潮流に対して斜めに船体が移動しているときには、ボートBTをそのまま真っすぐ前進させることで潮の流れに対するボートBTの位置を維持することができる。
【0093】
また、図10のように、風向きの影響により、船体の姿勢が斜めに傾いたときには、ステアリングと推力調整用原動機を操作制御して船体を前進させると共に右舵をとることで潮の流れに対するボートBTの位置および姿勢を維持することができる。また、図11のような場合には、同じくステアリングと推力調整用原動機を操作制御して船体を後退させると共に左舵をとることで潮の流れに対するボートBTの位置および姿勢を維持することができる。また、ポイント固定釣りの場合も同様な操作、制御を繰り返すことでポイント上にボートBTを所定の姿勢を維持しつつ位置させることができる。
【0094】
このように本発明の移動体制御装置100によれば、ボートBTなどの移動体に少なくとも2つ以上のGPS信号部A1、A2を備え、それらで検出されたボートBTの各位置測定点の位置を検出するようにしたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信部A1、A2で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確且つ容易にコントロールすることができる。
【0095】
また、移動判断部130における判断は、算定位置記憶部120で記憶された所定の算定位置を基準算定位置とし、この基準算定位置を記憶した後に記憶される他の算定位置が基準算定位置から所定半径内であるときは、位置測定点が停止していると判断し、算定位置記憶部120で記憶された所定の算定位置を基準算定位置とし、この基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径を外れたときに前記位置測定点が移動したと判断することにより、ボートBTの移動、停止を正確に判断することができる。
【0096】
すなわち、GPS信号は大気の影響などによって微妙に変化するため、一定の場所に停止していたとしても測定ごとに値がばらついてしまい、停止しているか動いているかの判断が難しい。特に、自動車のように車速センサなどからの情報が得られないボートBTの場合は尚更である。そのため、本発明のように記憶された所定の算定位置と基準算定位置からの所定半径との関係を見ることによってボートBTが移動しているか停止しているかを正確に判断することができる。
【0097】
また、移動判断部130における基準算定位置から所定半径を前述したようにGPS信号受信の際のHDOPの値に基づいて決定すれば、刻々と変化するHDOPの値に応じた適切な所定半径を算出できるため、より正確な移動判断を行うことができる。
【0098】
また、さらにこの移動判断部130における基準算定位置から所定半径を前述したように最尤法(Maximum likelihood estimation)により決定すれば、HDOPの値に応じた最適な所定半径を算出できるため、より正確な移動判断を行うことができる。
【0099】
また、このように移動や停止および姿勢の検出を行うことにより、加速度センサやジャイロスコープなどの専用のセンサ(ハードウェア)を用いることなくソフトウェア上でGPS信号による移動体の位置および姿勢を正確に決定することが可能となるため、コストの大幅な削減や故障による信頼性の低下を防止できる。
【0100】
また、風向きが潮の流れと一致する場合、または風向きが潮の流れと反対方向の場合、ボートBTはその姿勢を維持したまま潮の流れよりも速くまたは遅く移動することになる。そのため、図1に示すようにボートBTに潮流計A3を備え、この潮流計A3によって潮の流れも同時に検出し、その検出信号を姿勢制御部150などに入力するようにすれば、潮の流れに沿った流し釣りを容易に行うことができる。
【0101】
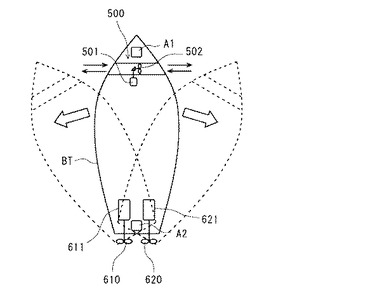
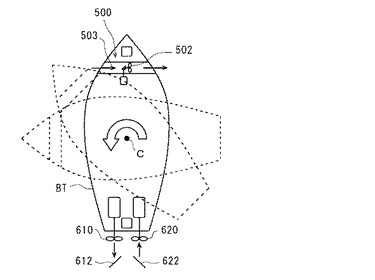
また、図18に示すようにボートBTの船首側にサイド(バウ)スラスター(side thruster)500を備えると共に、船尾側に2軸の推力スクリュー610,620を備え、これらを動作させることによってボートBTの船体の姿勢や位置を制御するようにしても良い。
【0102】
図示するように、このサイド(バウ)スラスター500は、第1のGPS受信部A1が設けられた船首部分に、これに左右に貫通するトンネル503を設け、そのトンネル502内にモータ501で駆動するプロペラ502を設置して、そのトンネル503内で左右方向の水流を作り出す構造となっている。従って、例えば2軸の推力スクリュー610,620を停止した状態でそのトンネル502内で進行方向に向かって右方向の流れを発生させると図中破線に示すように、船尾部分を軸として船体が左方向に旋回し、反対にそのトンネル502内で進行方向に向かって左方向の流れを発生させると船体が右方向に旋回するようになっている。
【0103】
また、第2のGPS受信部A2を有する船尾側に設けられた2軸の推力スクリュー610,620は、それぞれ独立したディーゼルエンジン611,621によって駆動されるようになっている。このディーゼルエンジン611,621は、ピストンで駆動されるコネクテングロッドに直接、推力スクリュー610,620の回転軸を接続したものであり、ディーゼルエンジン611,621のプランジャーポンプの噴射タイミングをコントロールすることでこれら推力スクリュー610,620を正逆いずれの方向にも回転駆動可能となっている。
【0104】
そのため、これらの2軸の推力スクリュー610,620を同じ方向に同じ回転数で回転駆動すれば、船体を真っすぐに前進または後退させることが可能となるだけでなく、両者の回転数に差をつければ、左右いずれの方向にも舵をとることが可能となっている。さらに、停止した状態で2軸の推力スクリュー610,620をそれぞれ反対方向に回転させれば、定位置での船体の向きを変えることも可能となっている。
【0105】
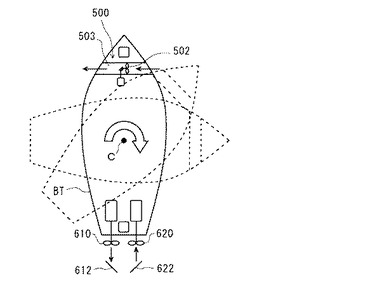
そして、この2軸の推力スクリュー610,620による回転駆動とサイド(バウ)スラスター500の駆動を複合すれば、図19乃至図21に示すように、舵とスクリューあるいはスパンカだけでは到底実現できないか、実現に困難が伴う船体の旋回(回転)や横方向の動きを与えることが可能となるため、容易且つ正確に船体の姿勢および位置を制御することができる。
【0106】
例えば、図19に示すようにサイド(バウ)スラスター500のトンネル503内に船体の右側から左側に向けて水の流れを発生させると同時に、推力スクリュー610,620をそれぞれ反対方向に回転すると共に舵612,622を逆ハの字形にすれば、船体の中心Cを軸としてその船体を定位置で時計回りに回転動作させることができる。
【0107】
これとは反対に、図20に示すようにサイド(バウ)スラスター500のトンネル503内に船体の左側から右側に向けて水の流れを発生させると同時に、推力スクリュー610,620をそれぞれ反対方向に回転すると共に舵612,622をハの字形にすれば、船体の中心Cを軸としてその船体を定位置で反時計回りに回転動作させることができる。これによって、風や潮流によって船体が回転した場合でも簡単に元の姿勢に戻すことができる。
【0108】
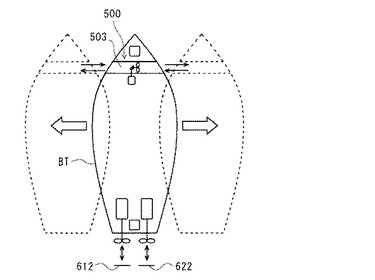
また、図21に示すように、サイド(バウ)スラスター500を駆動すると共に、舵612,622を平行にした状態で推力スクリュー610,620をそれぞれ逆方向に回転させると、船体がそのままの姿勢を保ったまま真横方向に移動することになる。これによって船体が風や潮流によって真横に流された場合でもそのずれた位置から船体をそのままの姿勢を保ったまま元の位置に戻るように移動することが可能となる。
【0109】
これを実現するためには、例えば図1に示すように、姿勢検知部150からの船体の姿勢および位置信号を受けた移動体制御10がボート制御部170に指令を送り、ボート制御部170が、これらサイド(バウ)スラスター500と2軸の推力スクリュー610,620の回転方向および回転数および舵612,622などを複合して逐次制御することで容易且つ確実に達成することができる。なお、この移動体制御のための構成としては、サイドスラスター500と従来の1軸式の推進スクリューおよびスパンカーとの組み合わせたものでも良く、また、このサイドスラスター500は、船首のみならず船尾側にも設けるようにしても良い。
【0110】
次に、このような構成をした本発明に係る移動体制御装置100を用いた移動局管理システム200の実施の一形態について説明する。この移動局管理システム200は、図12に示すように前述した移動体制御装置100を備えたボートからなる移動局300と、この移動局300と通信可能な基地局400とから構成されている。
【0111】
移動局300は、図13に示すように図1に示したような構成に加え、基地局400と無線通信するための通信部310を備えた構成になっている。この通信部310は、アナログ無線またはデジタル無線のような海洋無線や携帯電話網などの公知の通信設備をそのまま利用することができ、基地局400との間で各種データを送受信する機能を有している。
【0112】
基地局400は、地上の建物内などに設置されており、図14に示すようにGPS信号受信部410と、位置算定部420と、誤差計算部430と、通信部440とから主に構成されている。
【0113】
GPS信号受信部410は、その地図上の位置(緯度、経度)が予め正確に判明している場所(地上)に設置(固定)されたGPSアンテナから構成されており、その天空上のGPS衛星から発信されるGPS信号を受信して位置算定部420に送る機能を有する。
【0114】
位置算定部420は、このGPS信号受信部410で受信したGPS信号に基づいてその基地局400の位置を算出して誤差計算部430に送る機能を有する。
【0115】
誤差計算部430は、この位置算出部420で算出した基地局400の計算位置と実際の位置との誤差値を算出してその誤差値を通信部440に送る機能を有する。
【0116】
通信部440は、この誤差計算部430で算出したGPS位置情報の誤差値に関する情報を移動局300に送信する機能を有すると共に移動局300から送られる各種データを受信する機能を有する。また、さらにこの通信部440は、必要に応じて地図データや天気に関する任意の各種データを移動局300に送信する機能も有する。
【0117】
これらの機能を有する基地局400も具体的には図15に示すように電子計算機(コンピュータ:情報処理システム)を中心に構成されており、CPU(演算装置)101、CLC(クロック)102、ROM(読出専用メモリ)103、RAM(主記憶装置)104、バス105、I/F(入出力インターフェース)106、入力装置107、表示装置108、外部記憶装置109、GPSアンテナA、通信装置450などからなるハードウェアと、ROM103に予め記録された専用の制御プログラム(ソフトウェア)とが協働することによって図14に示した各部410乃至440の機能を実現する。
【0118】
図16は、このような構成をした移動局管理システム200における移動局300(移動体制御装置100)の処理の流れを示したものであり、図3で説明したステップS101からステップS110およびステップS120との間に新たにステップS111を加えたものである。
【0119】
すなわち、前述した図3で示すステップS101からステップS110までの処理によってボートBTの船首位置および船尾位置をそれぞれ決定したならば、ステップS111に移行し、基地局400から移動局300に送られてきた誤差値情報に基づいてそれぞれの決定位置を修正する。そしてこの誤差値に基づいてボートBTの船首位置および船尾位置を修正したならば、ステップS120以降は前述の処理(図3)と同様な処理を行うことになる。
【0120】
このように本発明の移動局管理システム200は、移動局300と基地局400とを通信可能とし、地上に設置された基地局400で計測された正確な位置情報の誤差値を随時移動局300に送るようにしたため、その移動局300のGPS測定値に誤差が生じていてもその誤差を基地局400から移動局300に知らせることができるため、移動局300はその誤差を修生した正確な位置および姿勢を求めることができる。
【0121】
また、移動局300の移動体制御装置100は、移動局300で受信したGPS信号の識別情報を基地局400に送信し、基地局400は受信したGPS信号のうち、移動局300で受信したGPS信号と共通するGPS信号に基づいて誤差値を算出するようにしても良い。また、この誤差の計算は移動局300側で行っても良い。また、GPS信号の受信状況は、地上にある基地局400よりも、電波を遮ることがない海洋上にある移動局300のほうが遙かに優れている。そのため、基地局400は、その位置算出に際して移動局300で受信したGPS信号を用いるようにしても良い。
【0122】
図17は、基地局400におけるこの誤差値の送信処理の流れを示したものである。先ず、基地局400は最初のステップS302においてGPS信号を受信したならば、次のステップS304に移行し、移動局300からのGPS信号識別情報を受信したか否かを判断する。すなわち、GPS信号にはGPS衛星ごとに割り当てられた識別情報が含まれており、移動局300は受信した全てのGPS信号の識別情報を通信部440を介して基地局400に送信する。
【0123】
ステップS304での判断の結果、識別情報を受信したと判断したとき(Yes)はステップS306に移行して基地局400で受信したGPS信号のうち共通するGPS信号に基づいて誤差を計算してステップS310に移行する。一方、識別情報を受信していないと判断したとき(No)はステップS308に移行して基地局400で受信したGPS信号のみに基づいて誤差を計算してステップS310に移行する。そして、ステップS310では、このようにして算出した誤差を移動局300に送信して処理を終了する。
【0124】
このように移動局300で受信したGPS信号と共通するGPS信号に基づいて誤差値を算出するようにすれば、移動局300と基地局400とが離れていたりして相互に受信するGPS信号が一部異なっている場合でも、正確な誤差を算出して移動局に知らせることができる。つまり、移動局300と基地局400とが離れていたりして相互に受信するGPS信号が一部異なっている場合には、基地局400での測定誤差がそのまま移動局300での測定誤差と一致しないことがある。この場合に、そのまま基地局400での測定誤差を移動局300に送っても正確な位置を求めることができないが、このように共通するGPS信号に基づいて基地局400の位置を算出すれば共通した正確な誤差値を移動局30に知らせることができる。
【0125】
また、基地局400は、移動局300の要求に応じて所定の地図(海図)情報を移動局に提供する地図情報提供手段をさらに備えていればなお良い。このような地図情報提供手段を備えておけば、移動局300は地図情報を持つ必要がなくなり、また、常に最新の地図情報を基地局400から取得することができる。なお、この地図(海図)情報は、緯度、経度のみだけでなく海面の高さを基準とする高低情報も含むものであって良い。
【符号の説明】
【0126】
100…移動体制御装置
101…演算装置(CPU)
102…クロック(CLC)
103…読出専用メモリ(ROM)
104…主記憶装置(RAM)
105…バス
106…入出力インターフェース
107…入力装置
108…表示装置
109…記憶装置
110…位置算定部
120…算定位置記憶部
130…移動判断部
140…位置決定部
150…姿勢検出部
160…移動体制御部
170…ボート制御部
180…入力部
190…表示部
200…移動局管理システム
300…移動局
310…通信部
400…基地局
410…GPS信号受信部
420…位置算定部
430…誤差計算部
440…通信部
450…通信装置
500…サイド(バウ)スラスター
610,620…(2軸の)推進スクリュー
612,622…舵
A…GPS受信部
A1…第1のGPS受信部
A2…第2のGPS受信部
A3…潮流計
BT…ボート(移動体)
【技術分野】
【0001】
本発明は、GPS(全地球測位装置)衛星が発するGPS信号を移動体がこれを受信し、その受信信号によって移動体を制御する移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラムに関するものである。
【背景技術】
【0002】
GPS信号を利用した移動体位置決定装置は、船舶や航空機用のナビゲーション装置の他に、カーナビゲーション装置や携帯型ナビゲーション装置などとして広く普及しており、現在の情報化社会にとって欠かせないものとなってきている。
【0003】
従来のナビゲーション装置による移動体の現在位置は、受信したGPS信号に基づいて所定の時間ごと、例えば1secごとに計算して液晶モニターなどに出力して表示している。しかし、このGPS信号は大気の状態や環境などによって刻々と変化するため、算出された現在位置は、移動体が停止している状態であっても数十cm〜数十メートル程度の誤差が生じることがある。
【0004】
このようなGPS信号による位置測定誤差を解消するために従来から様々な方法が用いられている。例えば、以下の特許文献1などでは、地図データ上に道路情報などのベクトルデータを重ね合わせ、このベクトルデータ上に現在位置を強制的にマッチングするといった、いわゆるマップマッチングと称される方法を用いることで測定誤差を解消する方法が開示されている。
【0005】
また、以下の特許文献2などでは、自動車などの移動体に加速度センサやジャイロスコープなどのセンサを搭載してこれらのセンサからの出力を用いたり、タイヤの回転に伴う車速信号などを用いることでGPS信号による位置測定誤差を解消する方法が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平8−50025号公報
【特許文献2】特開平11−94570号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、海洋で釣り(海釣り)を行う場合には、狙いの魚が集まるポイントとなる海域まで小型船舶やボートなど(以下「ボート」という)で移動し、そのボートに乗りながら釣り糸を海中に垂らして魚が食いつくのを待つものであるが、このような海釣りには、大きく分けてポイント固定と流し釣りの2種類がある。ポイント固定とは、海底のポイントに対してボートを固定(アンカリング)した状態で行う釣りのことであり、流し釣りとは、ボートを一箇所に固定せずに潮の流れに任せてポイント上を何度も移動しながら行う釣りのことである。
【0008】
これらの海釣りは、潮の流れだけでなく風の影響も受けるため、風向きによっては船体が傾いたり回転してしまい、その結果、海中の釣り糸が絡まったり、ポイントの位置を見失ってしまうことがある。そのため、これらの海釣り用のボートの船尾などにはスパンカーと称される小型の帆が設けられており、このスパンカーによって風に対するボートの姿勢を安定させるようにしている。
【0009】
しかし、スパンカーを装備していてもボートは風で押されて流されるため、ステアリング操作とボートの推力調整をしてボートの位置を常にコントロールしなければならない。また、風向きが変わるごとにスパンカーの向きを調整して船体の姿勢を保たなければなければならず、その操作は困難で煩わしいという問題がある。
【0010】
そこで、本発明はこれらの課題を解決するために案出されたものであり、その主たる目的は、スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる新規な移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラムを提供するものである。
【0011】
前記課題を解決するために第1の発明は、
人工衛星から発信されるGPS信号に基づいて移動体を制御する移動体制御装置であって、前記移動体の第1の位置測定点に取り付けられて前記GPS信号を連続的に受信する第1のGPS信号受信手段と、前記移動体に前記第1の位置測定点よりも所定距離離れた第2の位置測定点に取り付けられて前記GPS信号を連続的に受信する第2のGPS信号受信手段と、当該第1および第2のGPS信号受信手段で受信したGPS信号に基づいて所定時間ごとに前記移動体の第1および第2の位置測定点を算定する位置算定手段と、当該位置算定手段で算定された所定時間ごとの前記各位置測定点の算定位置を記憶する算定位置記憶手段と、当該算定位置記憶手段で記憶された前記各位置測定点ごとの算定位置同士の広がり具合に基づいて前記各位置測定点の停止または移動を判断する移動判断手段と、当該移動判断手段で前記各位置測定点が移動したと判断したときに前記各位置測定点の位置を決定する位置決定手段と、当該位置決定手段で決定された前記各位置測定点の位置に基づいて前記移動体の姿勢および位置を検出する姿勢検出手段と、当該姿勢検出手段で検出した前記移動体の姿勢および位置に基づいて前記移動体の姿勢および位置を任意に制御する移動体制御手段と、を備えたことを特徴とする移動体制御装置である。
【0012】
このような構成によれば、ボートなどの移動体に少なくとも2つ以上のGPS信号受信手段を備えたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信手段で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる。
【0013】
第2の発明は、
第1の発明において、前記移動判断手段は、前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径内であるときは前記位置測定点が停止していると判断し、前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径を外れたときに前記位置測定点が移動したと判断することを特徴とする移動体制御装置である。
【0014】
このような構成によれば、移動体の移動、停止を正確に判断することができる。すなわち、GPS信号は大気の影響などによって微妙に変化するため、一定の場所に停止していたとしても測定ごとに値がばらついてしまい、停止しているか動いているかの判断が難しい。そのため、本発明のように記憶された所定の算定位置と基準算定位置からの所定半径との関係を見ることによって移動体が移動しているか停止しているかを正確に判断することができる。
【0015】
第3の発明は、
第2の発明において、前記移動判断手段は、前記算定位置記憶手段で前記位置測定点が移動したと判断したときは、その判断の基準となった前記位置測定点の算定位置を前記基準算定位置として前記移動体の移動または停止を順に判断することを特徴とする移動体制御装置である。
【0016】
このような構成によれば、移動体の移動、停止を連続して判断できると共にその移動軌跡も把握することができる。
【0017】
第4の発明は、
第2または第3の発明において、前記移動判断手段における前記基準算定位置から所定半径は、前記GPS信号受信の際のHDOPの値に基づいて決定することを特徴とする移動体制御装置である。このようにすれば、刻々と変化するHDOPの値に応じた適切な所定半径を算出できるため、より正確な移動判断を行うことができる。
【0018】
ここで、このHDOP(Horizontal Dilution of Precision:水平成分の位置精度劣化度)とは、周知の通り衛星の幾何学的配置を指数化した位置精度劣化度(PDOP:Position Dilution of Precision)のうち、水平成分の位置精度劣化度を示したものである。この値が小さければ算定位置の精度が高く、大きければ算定位置の精度が低いことを示している。
【0019】
つまり、上空に衛星が分散している状態のとき、PDOPの値は小さくなる。逆に、衛星が1箇所に固まっていたり直線上になっていたりすると、PDOPの値は大きくなることが知られている。そして、PDOPの水平成分、垂直成分だけを指数化したものが、それぞれHDOP(Horizontal Dilution of Precision)とVDOP(Vertical Dilution of Precision:垂直成分の位置精度劣化度)である。衛星配置とHDOP、VDOPとは相反する関係となっており、中低仰角方向の異なった方位に複数の衛星が配置されているときにVDOPの値が小さくなり、天頂方向に衛星が複数あるときにHDOPの値が小さくなる。
【0020】
これらPDOP、HDOP、VDOPの間には、PDOP2=HDOP2+VDOP2の関係があるため、HDOP、VDOPの値が小さいときにPDOPの値も小さくなる。従って、天頂方向と中低仰角方向の異なった方位に複数の衛星が配置されているときにPDOPの値が小さくなるといえる。一般的にはPDOPの値が3以下のときは位置の精度が良好であり、3〜7では許容範囲、7以上では精度が悪いと考えられる。
【0021】
本発明においては、前述したようにPDOPのうち、水平成分の位置精度劣化度であるHDOPを採用する。これは、位置決定のための計算に要する負荷を軽減するためであるが、このHDOPと共にVDOPを採用しても良い。但し、VDOPのみでは水平方向への正確な移動判断ができないため、HDOPは常に用いる必要がある。
【0022】
第5の発明は、
第2乃至第4の発明において、前記移動判断手段における前記基準算定位置から所定半径は、最尤法(Maximum likelihood estimation)により決定することを特徴とする移動体制御装置である。
【0023】
このように前記移動判断手段における前記基準算定位置から所定半径を、最尤法(Maximum likelihood estimation)によって決定すれば、HDOPの値に応じた最適な所定半径を算出できるため、より正確な移動判断を行うことができる。ここで、この最尤法(Maximum likelihood estimation)とは、統計学において与えられたデータからそれが従う確率分布の母数について推測するためによく用いられる方法であり、尤度の概念を利用するものである。なお、この最尤法(Maximum likelihood estimation)を用いた具体例については後に詳述する。
【0024】
第6の発明は、
第1乃至第5の発明において、前記移動体は船体であり、移動体制御手段は、前記船体の船首側に設けられたサイドスラスターを有することを特徴とする移動体制御装置である。このような構成によれば、舵とスクリューだけでは実現できないか、実現に困難が伴う船体に横方向の動きを与えることができるため、容易且つ正確に船体の姿勢および位置を制御することができる。
【0025】
第7の発明は、
第1乃至第6のいずれかの発明において、前記移動体は船体であり、移動体制御手段は、前記船体の船尾に設けられてそれぞれ独立して駆動する2軸の推力スクリューを有することを特徴とする移動体制御装置である。このような構成によれば、2軸の推力スクリューをそれぞれ独立して駆動することにより、狭い領域で容易且つ正確に船体の姿勢および位置を制御することができる。
【0026】
第8の発明は、
互いに通信可能な移動局と基地局とを有する移動局管理システムであって、前記移動局は、前記請求項1乃至5のいずれかの移動体制御装置と、前記基地局と通信する通信手段を備え、前記基地局は、人工衛星から発信されるGPS信号を地上の固定点で受信するGPS信号受信手段と、当該GPS信号受信手段で受信したGPS信号に基づいて当該基地局の位置を算出する位置算出手段と、当該位置算出手段で算出した当該基地局の計算位置と実際の位置との誤差値を算出する誤差計算手段と、当該誤差計算手段で算出した誤差値を前記基地局に送信する通信手段とを備え、前記移動局の移動体制御装置は、前記基地局に送信された誤差値に基づいて前記位置決定手段で決定した前記各位置測定点の位置を修正することを特徴とする移動局管理システムである。
【0027】
このような構成によれば、その移動局のGPS測定値に誤差が生じていてもその誤差が基地局から移動局に知らせることができるため、移動局はその誤差を考慮した正確な位置を求めることができる。
【0028】
第9の発明は、
第8の発明において、前記移動局の移動体制御装置は、前記移動局で受信したGPS信号の識別情報を前記通信手段によって前記基地局に送信し、前記基地局または前記移動局の位置算出手段は、前記基地局で受信したGPS信号のうち、前記移動局で受信したGPS信号と共通するGPS信号に基づいて前記誤差値を算出することを特徴とする移動局管理システムである。
【0029】
このような構成によれば、移動局と基地局とが離れていたりして相互に受信するGPS信号が一部異なっている場合でも、正確な誤差を算出して移動局に知らせることができる。つまり、移動局と基地局とが離れていたりして相互に受信するGPS信号が一部異なっている場合には、基地局での測定誤差と移動局での測定誤差が大きく異なることがある。この場合に、そのまま基地局での測定誤差を移動局に送っても正確な位置を求めることができないが、本発明のように共通するGPS信号に基づいて基地局の位置を算出すれば正確な誤差を移動局に知らせることができる。
【0030】
第10の発明は、
第8または第9の発明において、前記基地局は、前記移動局の要求に応じて所定の地図情報を当該移動局に提供する地図情報提供手段をさらに備えていることを特徴とする移動局管理システムである。このような構成によれば、移動局は地図情報を持つ必要がなくなり、また、常に最新の地図情報を基地局から取得することができる。
【0031】
第11の発明は、
人工衛星から発信されるGPS信号に基づいて移動体を制御する移動体制御方法であって、前記移動体の第1の位置測定点に取り付けられた第1の第1のGPSアンテナによって前記GPS信号を連続的に受信する第1のGPS信号受信ステップと、前記移動体に前記第1の位置測定点よりも所定距離離れた第2の位置測定点に取り付けられた第2のGPSアンテナによって前記GPS信号を連続的に受信する第2のGPS信号受信ステップと、当該第1および第2のGPS信号受信ステップで受信したGPS信号に基づいて所定時間ごとに前記移動体の第1および第2の位置測定点を算定する位置算定ステップと、当該位置算定ステップで算定された所定時間ごとの前記各位置測定点の算定位置を記憶する算定位置記憶ステップと、当該算定位置記憶ステップで記憶された前記各位置測定点ごとの算定位置同士の広がり具合に基づいて前記各位置測定点の停止または移動を判断する移動判断ステップと、当該移動判断ステップで前記各位置測定点が移動したと判断したときに前記各位置測定点の位置を決定する位置決定ステップと、当該位置決定ステップで決定された前記各位置測定点の位置に基づいて前記移動体の姿勢および位置を検出する姿勢検出ステップと、当該姿勢検出ステップで検出した前記移動体の姿勢および位置に基づいて前記移動体の姿勢および位置を任意に制御する移動体制御ステップと、を含むことを特徴とする移動体制御方法である。
【0032】
このような方法によれば、ボートなどの移動体に少なくとも2つ以上のGPS信号受信手段を備えたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信手段で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる。
【0033】
第12の発明は、
第11の発明において、前記移動判断ステップでは、前記算定位置記憶ステップで記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径内であるときは前記位置測定点が停止していると判断し、前記算定位置記憶ステップで記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径を外れたときに前記位置測定点が移動したと判断することを特徴とする移動体制御方法である。
【0034】
このような方法であれば、移動体の移動、停止を正確に判断することができる。すなわち、GPS信号は大気の影響などによって微妙に変化するため、一定の場所に停止していたとしても測定ごとに値がばらついてしまい、停止しているか動いているかの判断が難しい。そのため、本発明のように記憶された所定の算定位置と基準算定位置からの所定半径との関係を見ることによって移動体が移動しているか停止しているかを正確に判断することができる。
【0035】
第13の発明は、
第12の発明において、前記移動判断ステップでは、前記算定位置記憶ステップで前記位置測定点が移動したと判断したときは、その判断の基準となった前記位置測定点の算定位置を前記基準算定位置として前記移動体の移動または停止を順に判断することを特徴とする移動体制御方法である。
【0036】
このような方法によれば、第3の発明と同様に移動体の移動、停止を連続して判断できると共にその移動軌跡も把握することができる。
【0037】
第14の発明は、
第12または第13の発明において、前記移動判断ステップにおける前記基準算定位置から所定半径は、前記GPS信号受信の際のHDOPの値に基づいて決定することを特徴とする移動体制御方法である。このようにすれば、刻々と変化するHDOPの値に応じた適切な所定半径を算出できるため、より正確な移動判断を行うことができる。
【0038】
第15の発明は、
第11乃至第14の発明において、前記移動判断手段における前記基準算定位置から所定半径は、最尤法(Maximum likelihood estimation)により決定することを特徴とする移動体制御方法である。このようにすれば、HDOPの値に応じた最適な所定半径を算出できるため、より正確な移動判断を行うことができる。
【0039】
第16の発明は、
互いに通信可能な移動局と基地局とを有する移動局管理方法であって、前記移動局は、前記請求項1乃至5のいずれかの移動体制御装置と、前記基地局と通信する通信手段を備え、前記基地局は、人工衛星から発信されるGPS信号を地上の固定点で受信するGPS信号受信ステップと、当該GPS信号受信ステップで受信したGPS信号に基づいて当該基地局の位置を算出する位置算出ステップと、当該位置算出ステップで算出した当該基地局の計算位置と実際の位置との誤差値を算出する誤差計算ステップと、当該誤差計算ステップで算出した誤差値を前記基地局に送信する通信ステップとを備え、前記移動局の移動体制御装置は、前記基地局に送信された誤差値に基づいて前記位置決定手段で決定した前記各位置測定点の位置を修正することを特徴とする移動局管理方法である。
【0040】
このような方法によれば、その移動局のGPS測定値に誤差が生じていてもその誤差を基地局から移動局に知らせることができるため、移動局はその誤差を考慮した正確な位置を求めることができる。
【0041】
第17の発明は、
第16の発明において、前記移動局の移動体制御装置は、前記移動局で受信したGPS信号の識別情報を前記通信手段によって前記基地局に送信し、前記基地局または移動局の位置算出ステップでは、前記基地局で受信したGPS信号のうち、前記移動局で受信したGPS信号と共通するGPS信号に基づいて前記誤差値を算出することを特徴とする移動局管理方法である。
【0042】
このような方法によれば、移動局と基地局とが離れていたりして相互に受信するGPS信号が一部異なっている場合でも、正確な誤差を算出して移動局に知らせることができる。
【0043】
第18の発明は、
第16または第17の発明において、前記基地局は、前記移動局の要求に応じて所定の地図情報を当該移動局に提供することを特徴とする移動局管理方法である。このような方法によれば、移動局は地図情報を持つ必要がなくなり、また、常に最新の地図情報を基地局から取得することができる。
【0044】
第19の発明は、
人工衛星から発信されるGPS信号に基づいて移動体を制御する移動体制御プログラムであって、コンピュータを、前記移動体の第1の位置測定点に取り付けられて前記GPS信号を連続的に受信する第1のGPS信号受信手段と、前記移動体に前記第1の位置測定点よりも所定距離離れた第2の位置測定点に取り付けられて前記GPS信号を連続的に受信する第2のGPS信号受信手段と、当該第1および第2のGPS信号受信手段で受信したGPS信号に基づいて所定時間ごとに前記移動体の第1および第2の位置測定点を算定する位置算定手段と、当該位置算定手段で算定された所定時間ごとの前記各位置測定点の算定位置を記憶する算定位置記憶手段と、当該算定位置記憶手段で記憶された前記各位置測定点ごとの算定位置同士の広がり具合に基づいて前記各位置測定点の停止または移動を判断する移動判断手段と、当該移動判断手段で前記各位置測定点が移動したと判断したときに前記各位置測定点の位置を決定する位置決定手段と、当該位置決定手段で決定された前記各位置測定点の位置に基づいて前記移動体の姿勢および位置を検出する姿勢検出手段と、当該姿勢検出手段で検出した前記移動体の姿勢および位置に基づいて前記移動体の姿勢および位置を任意に制御する移動体制御手段と、して機能させることを特徴とする移動体制御プログラムである。
【0045】
このようなプログラムによれば、ボートなどの移動体に少なくとも2つ以上のGPS信号受信手段を備えたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信手段で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる。
【0046】
第20の発明は、
第18の発明において、前記コンピュータで機能する前記移動判断手段は、前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径内であるときは前記位置測定点が停止していると判断し、前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径を外れたときに前記位置測定点が移動したと判断することを特徴とする移動体制御プログラムである。このようなプログラムによれば、移動体の移動、停止を正確に判断することができる。
【0047】
第21の発明は、
第20の発明において、前記コンピュータで機能する前記移動判断手段は、前記算定位置記憶手段で前記位置測定点が移動したと判断したときは、その判断の基準となった前記位置測定点の算定位置を前記基準算定位置として前記移動体の移動または停止を順に判断することを特徴とする移動体制御プログラムである。このようなプログラムによれば、移動体の移動、停止を連続して判断できると共にその移動軌跡も把握することができる。
【0048】
第22の発明は、
第20または21の発明において、前記移動判断手段における前記基準算定位置から所定半径は、前記GPS信号受信の際のHDOPの値に基づいて決定することを特徴とする移動体制御プログラムである。このようなプログラムによれば、刻々と変化するHDOPの値に応じた適切な所定半径を算出できるため、より正確な移動判断を行うことができる。
【0049】
第23の発明は、
第20乃至第22の発明において、前記移動判断手段における前記基準算定位置から所定半径は、最尤法(Maximum likelihood estimation)により決定することを特徴とする移動体制御プログラムである。このようにすれば、HDOPの値に応じた最適な所定半径を算出できるため、より正確な移動判断を行うことができる。
【0050】
第24の発明は、
互いに通信可能な移動局と基地局とを有する移動局管理プログラムであって、前記移動局のコンピュータを、前記請求項1乃至5のいずれかの移動体制御装置と、前記基地局と通信する通信手段として機能させ、前記基地局のコンピュータを、人工衛星から発信されるGPS信号を地上の固定点で受信するGPS信号受信手段と、当該GPS信号受信手段で受信したGPS信号に基づいて当該基地局の位置を算出する位置算出手段と、当該位置算出手段で算出した当該基地局の計算位置と実際の位置との誤差値を算出する誤差計算手段と、当該誤差計算手段で算出した誤差値を前記基地局に送信する通信手段として機能させ、前記移動局の移動体制御装置を、前記基地局に送信された誤差値に基づいて前記位置決定手段で決定した前記各位置測定点の位置を修正するように機能させることを特徴とする移動局管理プログラムである。
【0051】
このようなプログラムによれば、その移動局のGPS測定値に誤差が生じていてもその誤差を基地局から移動局に知らせることができるため、移動局はその誤差を考慮した正確な位置を求めることができる。
【0052】
第25の発明は、
第24の発明において、前記移動局の移動体制御装置を、前記移動局で受信したGPS信号の識別情報を前記通信手段によって前記基地局に送信するように機能させ、前記基地局または前記移動局の位置算出手段を、前記基地局で受信したGPS信号のうち、前記移動局で受信したGPS信号と共通するGPS信号に基づいて前記誤差値を算出するように機能させることを特徴とする移動局管理プログラムである。
【0053】
このようなプログラムによれば、移動局と基地局とが離れていたりして相互に受信するGPS信号が一部異なっている場合でも、正確な誤差を算出して移動局に知らせることができる。
【0054】
第26の発明は、
第24または第25の発明において、前記基地局は、前記移動局の要求に応じて所定の地図情報を当該移動局に提供することを特徴とする移動局管理方法である。このような方法によれば、移動局は地図情報を持つ必要がなくなり、また、常に最新の地図情報を基地局から取得することができる。
【発明の効果】
【0055】
本発明によれば、ボートなどの移動体に少なくとも2つ以上のGPS信号受信手段を備えたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信手段で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできるなどといった優れた効果を発揮できる。
【図面の簡単な説明】
【0056】
【図1】本発明に係る移動体制御装置100の実施の一形態を示す全体ブロック図である。
【図2】本発明に係る移動体制御装置100を構成するハードウェア構成図である。
【図3】本発明に係る移動体位置決定方法の流れを示すフローチャート図である。
【図4】図3のステップS107およびS108(移動判断処理)の詳細な流れを示すフローチャート図である。
【図5】HDOPと算定された移動体の現在位置との関係を示す図である。
【図6】HDOPと停止半径との関係を示す図である。
【図7】HDOPと算定位置数および停止半径中心を示す正規分布図である。
【図8】潮流とボートBT(移動体)との関係を示す模式図である。
【図9】潮流および風とボートBT(移動体)との関係を示す模式図である。
【図10】潮流とボートBT(移動体)との関係を示す模式図である。
【図11】潮流および風とボートBT(移動体)との関係を示す模式図である。
【図12】本発明の移動局管理システム200の実施の一形態を示す概念図である。
【図13】本発明の移動局管理システム200の移動局300を構成するブロック図である。
【図14】本発明の移動局管理システム200の基地局400を構成するブロック図である。
【図15】基地局400を構成するハードウェア構成図である。第2の実施形態に係る図3のステップS400(移動体判断処理)の詳細な流れを示すフローチャート図である。
【図16】移動局300の位置決定方法の流れを示すフローチャート図である。
【図17】本発明の移動局管理システム200による処理の一例を示すフローチャート図である。
【図18】移動体制御手段としてサイドスラスターと2軸の推進スクリューとを有するボートBT(移動体)の動き(旋回)の一例を示した模式図である。
【図19】移動体制御手段としてサイドスラスターと2軸の推進スクリューとを有するボートBT(移動体)の動き(右回転)の一例を示した模式図である。
【図20】移動体制御手段としてサイドスラスターと2軸の推進スクリューとを有するボートBT(移動体)の動き(左回転)の一例を示した模式図である。
【図21】移動体制御手段としてサイドスラスターと2軸の推進スクリューとを有するボートBT(移動体)の動き(横移動)の一例を示した模式図である。
【発明を実施するための形態】
【0057】
次に、本発明の実施の形態を添付図面を参照しながら説明する。
【0058】
図1乃至図11は、本発明に係る移動体制御装置100の第1の実施形態を示したものである。図1に示すようにこの移動体制御装置100は、移動体の一つであるボートBTなどに搭載されて用いられるものであり、第1のGPS受信部A1と、第2のGPS受信部A2と、位置算定部110と、算定位置記憶部120と、移動判断部130と、位置決定部140と、姿勢検出部150と、移動体制御部160と、ボート制御部170、入力部180および表示部190とから主に構成されている。
【0059】
GPS受信部A1は、公知のGPSアンテナなどから構成されており、ボートBTの船首(Bow:第1の位置測定点)側に固定されて、その天空上に位置する複数のGPS(Global Positioning System)衛星からそれぞれ発信される、その位置情報と時刻情報とを含むGPS信号を受信してその受信したGPS信号を位置算定部110に入力する機能を有する。
【0060】
また、GPS受信部A2も同じく公知のGPSアンテナなどから構成されており、ボートBTの船尾(Stern:第2の位置測定点)側に固定されて、その天空上に位置する複数のGPS(Global Positioning System)衛星からそれぞれ発信される、その位置情報と時刻情報とを含むGPS信号を受信してその受信したGPS信号を位置算定部110に入力する機能を有する。
【0061】
位置算定部110は、これら各々のGPS受信部A1およびA2で受信したGPS信号に基づいて、一定時間間隔ごと(例えば、1秒ごと)に海面上における、そのボートBTの船首および船尾の現在位置(経度、緯度)を計算し、計算し終えると一定のフォーマット(例えば、NMEA0183仕様)で算定位置記憶部120に出力する機能を有する。なお、この位置算定部110によるボートBTの船首および船尾の現在位置の算定方法は、従来公知の方法そのものを用いたものである。なお、後述するように一般に海面上のボートBTは、その周囲にGPS信号を遮る建造物や樹木などが無いため、GPS受信部A1およびA2におけるHDOP(Horizontal Dilution of Precision:水平成分の位置精度劣化度)が小さくなり、高精度(数十cm〜数m程度)の位置測定が可能となる。
【0062】
ここで、この位置算定部110で算定される一定時間間隔ごとの各々の位置情報(ボートBTの船首および船尾の現在位置)は、GPS衛星からの信号伝播経路と空間媒体の物理定数の変化によりボートBTが停止していても毎回異なる。また、この位置情報はGPS衛星の天空上での分散状態でも異なる。そのため、この位置算定部110は、受信したGPS信号の発信元であるGPS衛星の分散度から位置精度劣化度(PDOP:Position Dilution of Precision)のうち、主に水平成分の位置精度劣化度を示したHDOP(Horizontal Dilution of Precision)も同時に算定する機能を有する。
【0063】
算定位置記憶部120は、この位置算定部110によって所定時間ごとに各々算定されるボートBTの船首および船尾の現在位置を所定数、所定時間記憶し、記憶した位置情報を移動判断部130に出力する機能を有する。
【0064】
移動判断部130は、前記算定位置記憶部120で記憶したボートBTの船首および船尾の位置情報を用い、後述する最尤法によりそのボートBTの船首および船尾の移動および停止を判断する機能を有する。
【0065】
位置決定部140は、前記移動判断部130でボートBTの船首および船尾の位置が移動したと判断したときに、同じく後述する最尤法によりボートBTの船首および船尾の位置を決定する機能を有する。
【0066】
姿勢検出部150は、前記位置決定部140で決定されたボートBTの船首および船尾の位置に基づいてそのボートBTの姿勢(向き)および位置を検出する機能を有する。すなわち、ボートBTの船首および船尾の位置関係を把握することでボートBTがどの方向を向いているのかなどを正確に検出可能となっている。
【0067】
移動体制御部160は、姿勢検出部150で検出したボートBTの姿勢および位置に基づいてそのボートBTの姿勢および位置を直接制御するボート制御部170を制御する機能を有する。
【0068】
ボート制御部170は、移動体制御部160からの制御信号に基づいてボートBTのステアリング操作や推力調整用原動機を制御してボートBTの姿勢および位置を直接制御する機能を有する。
【0069】
入力部180は、利用者による各種操作、例えば電源入断や表示の切り替え、表示画面の拡縮、表示設定などの各種操作を行う操作手段(操作ボタンなど)から構成されている。
【0070】
表示部190は、液晶ディスプレイなどの視認可能な表示画面を備えており、主に前記位置決定部140で決定されたボートBTの位置、および姿勢検出部150で検出したボートBTの姿勢(向き)を利用者が視認可能な画像情報などとして表示画面上に表示する機能を有する。なお、この位置表示部80は、ボートBTの位置などと同時に地図(海図)なども表示可能となっている。
【0071】
このような機能を有する本発明の移動体制御装置100は、具体的には図2に示すように電子計算機(コンピュータ:情報処理システム)を中心に構成されており、CPU(演算装置)101、CLC(クロック)102、ROM(読出専用メモリ)103、RAM(主記憶装置)104、バス105、I/F(入出力インターフェース)106、入力装置107、表示装置108、外部記憶装置109、第1のGPSアンテナA1、第2のGPSアンテナA2、ボート制御部170などからなるハードウェアと、ROM103に予め記録された専用の制御プログラム(ソフトウェア)とが協働することによって図1に示した各部110乃至160の機能を実現する。
【0072】
具体的には、第1のGPSアンテナA1および第2のGPSアンテナA2が図1に示す第1のGPS受信部A1および第1のGPS受信部A2に対応し、入力装置107が入力部180に対応し、表示装置108が表示部190に対応する。そして、CPU101、CLC102、ROM103、RAM104、バス105、I/F106、記憶装置109およびROM103に予め記録された専用の制御プログラム(ソフトウェア)によって図1に示す位置算定部110、算定位置記憶部120、移動判断部130、位置決定部140、姿勢検出部150、移動制御部160が実現される。
【0073】
次に、このような構成をした本発明の移動体制御装置100による移動体位置決定方法を、主に図3のフローチャートを参照しながら説明する。図示するように、先ずこの移動体制御装置100(のCPU101)は、電源投入後の所定のシステムチェックが終了したならば、最初のステップS101、ステップS102に移行して第1および第2のGPSアンテナA1、A2によるGPS信号の受信処理をそれぞれ並行に実行してそれぞれ次のステップS103,S104に移行する。
【0074】
ステップS103,S104では、最初のステップS101、ステップS102でそれぞれ受信したGPS信号に基づいてボートBTの船首(第1の位置測定点)および船尾(第2の位置測定点)の現在位置を一定時間間隔ごとに計算により求め、次のステップS105、S106に移行する。ステップS105,S106では、前のステップS103,S104でそれぞれ算定したボートBTの船首および船尾の現在位置情報をそれぞれ所定時間、所定数記憶して次のステップS107、S108に移行する。ステップS107,S108では、ステップS105,S106で記憶したボートBTの船首および船尾の複数の現在位置情報に基づいてボートBTの船首および船尾が移動したか否かを判断する。
【0075】
図4は、このステップS107、S108におけるそれぞれの移動判断処理の流れを示したフローである。なお、この移動判断処理の流れは、ステップS107、S108のいずれでも同じであるからステップS107における船首(第1の位置測定点)について説明する。図示するように、最初のステップS202では受信したGPS信号からその時間帯における水平成分の位置精度劣化度であるHDOPを算定する。所定時間間隔ごとに算定される船首の現在位置に関する位置情報は、GPS衛星の天空上での分散状態でも異なることから、以下の数式1で示される分散をもっているからである。
【0076】
【数1】
ここで、xi(x=x1、x2、x3…、xn)はN(μ、σi2)、μはサンプル値、σは標準偏差値である。
上式1の対数をとると、以下の数式2となる。
【0077】
【数2】
この数式2から、μ(サンプル値)、σ(標準偏差値)は以下の数式3のようになる
【0078】
【数3】
従って、GPS衛星の分散状態をHDOPで表すと、σiがHDOPと比例関係にあるからσiは、以下の数式4のようになる。
【0079】
【数4】
【0080】
図5は、船首が停止している状態で一定時間間隔ごとに算定された複数の現在位置(緯度、経度)の集合と、HDOPとの関係を示したものである。同図(A)に示すように、HDOPが小さい(「1.0」,「1.1」,「1.3」)ときは船首の算定位置の集合の広がり具合(バラツキ)が小さいが、同図(2)から(4)に示すように、HDOPが大きくなるに従って徐々に船首の現在算定位置の集合のバラツキが大きくなっていることを示している。つまり、HDOPが小さいほど高精度の位置測定が可能となる。
【0081】
図4のフローに戻り、ステップS202においてHDOPの算定処理が行われたならば、次のステップS204に移行して最尤法(Maximum likelihood estimation)による集合の停止半径の決定を行って次のステップS206に移行する。すなわち、前記のようにボートBTの船首が停止している状態であってもHDOPの値によって算定位置の集合のバラツキが大きく異なることから、HDOPの値に基づいて算定位置の集合の中心とその中心からの標準偏差値から停止半径を決定する。この結果、図6(A)に示すようにHDOPが小さいときには停止半径は小さくなり、図6(B)に示すようにHDOPが大きいときには停止半径は大きくなる。
【0082】
船尾が停止している状態で一定時間間隔で算定された船首の現在位置(緯度、経度)の集合の中心の値は、図7に示すようにΣiλi・xiであるから、数値計算するとHDOPの値の大小によって集合の中心からのずれが計算される。HDOPの値を考慮して集合の中心を求めると共にその中心からの標準偏差値から停止半径を決定する。図7は、所定時間内に算定された船首の算定位置とその数との関係を示した正規分布図であり、標準偏差σ1よりも小さい標準偏差σ2のほうが停止半径を小さくできることがわかる。
【0083】
ステップS206では、このようにして最尤法による停止半径が決定された後に記憶された新たな算定位置を取得して次のステップS210に移行する。
【0084】
ステップS210では、新たに取得した算定位置が決定された停止半径を超えたか否かを判断し、越えていないと判断したとき(No)は、ステップS208に移行して船首は移動していない、つまり停止した状態であると判断してステップS206に戻って次の新たな算定位置の取得を繰り返す。これに対し、取得した算定位置が決定された停止半径を超えていると判断したとき(Yes)は、次のステップS212に移行して船首は移動したと判断する。船尾の場合もこれと全く同様の処理によってその停止、移動が判断される。なお、この移動、停止は船首および船尾で一致しない場合もある。すなわち、例えば船首を中心に船尾側が回転移動した場合には、船首は停止と判断され、船尾が移動したと判断される。
【0085】
また、その停止半径の中心(Σiλi・xi)を移動前の船首の正式な位置として決定したならば、決定したその位置を表示部190の画面上に表示しても良い。この場合、この船首の位置表示方法としては、その緯度および経度を数値として表示する他に、表示部190の画面上に表示された地図(海図)上に船首の現在位置を示す点やマークなどを重ねて記すことで表示する方法の他、縦軸に経度または緯度、横軸に緯度または経度が記された画面上に同じく船首の現在位置を示す点やマークなどを記す方法でも良い。
【0086】
図3のフローに戻り、このようにステップS107,S108において船首および船尾の移動を判断したならば、それぞれ次のステップS109,S110に移動して船首および船尾の位置を決定して次のステップS120に移行してボートBTの船体の姿勢(向き)を検出する。すなわち、ボートBTが完全に停止してる状態は勿論、例えば図8に示すようにボートBTが潮の流れに沿って動いていても無風状態のときは、船体の姿勢(向き)は変わらない。また、図9のように風が船首方向から真っすぐ吹いているときには、潮の流れと風力とによって船体が斜め方向に移動するがその姿勢自体は変わらない。
【0087】
これに対し、図10や図11のように風が右斜め前方や左下後方から吹いていると、その風の影響によって船体が左斜めに傾くように姿勢が変化する。このような姿勢の変化は船首と船尾の位置関係を測定するだけで容易に把握することができる。また、前述したように海面上はHDOPが小さく測定精度が高いため、数十cm〜数mの移動も精度良く感知することができる。
【0088】
ステップS120においてボートBTの船体の姿勢(向き)を検出したならば、次のステップS140に移行し、所定の姿勢(向き)を保っているかを判断する。すなわち、例えば、流し釣りのように潮の流れに沿ってボートBTを移動する場合には、海中に垂らした釣り糸が絡み合ったりしないように、ボートBTの姿勢を一定に保つことが重要となる。また、ポイント固定の場合も船の姿勢が変わって同じく海中に垂らした釣り糸が絡み合ったりしないように、ボートBTの姿勢を一定に保つことが重要となる。
【0089】
この判断の結果、所定の姿勢(向き)を保っていないと判断した(No)とき(向きが変化したと判断したとき)は、ステップS130に移行して船体の姿勢を修正するように制御する。
【0090】
具体的には、図1に示すように姿勢制御部150からの姿勢制御信号を受けた移動制御部160がボート制御部17に対して船体の姿勢を所定の姿勢に修正する信号を送り、これを受けたボート制御部17がボートBTのステアリングや推力調整用原動機を操作、制御することで船体の姿勢の修正が行われる。なお、この姿勢修正中にもステップS101からステップS120までの処理が繰り返し行われ、所定の姿勢に修正されたか否かが判断される。
【0091】
そして、所定の姿勢(向き)を保っていると判断した(Yes)ときはステップS150に移行し、その船体の位置を検出して次のステップS160に移行する。ステップS160では、船体の位置が所定の位置よりもずれているか否かを判断し、ずれていないと判断したとき(No)はそのまま処理を終了するが、ずれていると判断したとき(Yes)は、次のステップS170に移行して船体の位置を制御する。なお、この船体の姿勢制御および位置制御は同時に行っても良い。
【0092】
例えば、図9に示すように流し釣りを行っている場合に、船体の姿勢(向き)は一定に保っているが、風の影響により、船体が船首方向より押され、潮流に対して斜めに船体が移動しているときには、ボートBTをそのまま真っすぐ前進させることで潮の流れに対するボートBTの位置を維持することができる。
【0093】
また、図10のように、風向きの影響により、船体の姿勢が斜めに傾いたときには、ステアリングと推力調整用原動機を操作制御して船体を前進させると共に右舵をとることで潮の流れに対するボートBTの位置および姿勢を維持することができる。また、図11のような場合には、同じくステアリングと推力調整用原動機を操作制御して船体を後退させると共に左舵をとることで潮の流れに対するボートBTの位置および姿勢を維持することができる。また、ポイント固定釣りの場合も同様な操作、制御を繰り返すことでポイント上にボートBTを所定の姿勢を維持しつつ位置させることができる。
【0094】
このように本発明の移動体制御装置100によれば、ボートBTなどの移動体に少なくとも2つ以上のGPS信号部A1、A2を備え、それらで検出されたボートBTの各位置測定点の位置を検出するようにしたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信部A1、A2で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確且つ容易にコントロールすることができる。
【0095】
また、移動判断部130における判断は、算定位置記憶部120で記憶された所定の算定位置を基準算定位置とし、この基準算定位置を記憶した後に記憶される他の算定位置が基準算定位置から所定半径内であるときは、位置測定点が停止していると判断し、算定位置記憶部120で記憶された所定の算定位置を基準算定位置とし、この基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径を外れたときに前記位置測定点が移動したと判断することにより、ボートBTの移動、停止を正確に判断することができる。
【0096】
すなわち、GPS信号は大気の影響などによって微妙に変化するため、一定の場所に停止していたとしても測定ごとに値がばらついてしまい、停止しているか動いているかの判断が難しい。特に、自動車のように車速センサなどからの情報が得られないボートBTの場合は尚更である。そのため、本発明のように記憶された所定の算定位置と基準算定位置からの所定半径との関係を見ることによってボートBTが移動しているか停止しているかを正確に判断することができる。
【0097】
また、移動判断部130における基準算定位置から所定半径を前述したようにGPS信号受信の際のHDOPの値に基づいて決定すれば、刻々と変化するHDOPの値に応じた適切な所定半径を算出できるため、より正確な移動判断を行うことができる。
【0098】
また、さらにこの移動判断部130における基準算定位置から所定半径を前述したように最尤法(Maximum likelihood estimation)により決定すれば、HDOPの値に応じた最適な所定半径を算出できるため、より正確な移動判断を行うことができる。
【0099】
また、このように移動や停止および姿勢の検出を行うことにより、加速度センサやジャイロスコープなどの専用のセンサ(ハードウェア)を用いることなくソフトウェア上でGPS信号による移動体の位置および姿勢を正確に決定することが可能となるため、コストの大幅な削減や故障による信頼性の低下を防止できる。
【0100】
また、風向きが潮の流れと一致する場合、または風向きが潮の流れと反対方向の場合、ボートBTはその姿勢を維持したまま潮の流れよりも速くまたは遅く移動することになる。そのため、図1に示すようにボートBTに潮流計A3を備え、この潮流計A3によって潮の流れも同時に検出し、その検出信号を姿勢制御部150などに入力するようにすれば、潮の流れに沿った流し釣りを容易に行うことができる。
【0101】
また、図18に示すようにボートBTの船首側にサイド(バウ)スラスター(side thruster)500を備えると共に、船尾側に2軸の推力スクリュー610,620を備え、これらを動作させることによってボートBTの船体の姿勢や位置を制御するようにしても良い。
【0102】
図示するように、このサイド(バウ)スラスター500は、第1のGPS受信部A1が設けられた船首部分に、これに左右に貫通するトンネル503を設け、そのトンネル502内にモータ501で駆動するプロペラ502を設置して、そのトンネル503内で左右方向の水流を作り出す構造となっている。従って、例えば2軸の推力スクリュー610,620を停止した状態でそのトンネル502内で進行方向に向かって右方向の流れを発生させると図中破線に示すように、船尾部分を軸として船体が左方向に旋回し、反対にそのトンネル502内で進行方向に向かって左方向の流れを発生させると船体が右方向に旋回するようになっている。
【0103】
また、第2のGPS受信部A2を有する船尾側に設けられた2軸の推力スクリュー610,620は、それぞれ独立したディーゼルエンジン611,621によって駆動されるようになっている。このディーゼルエンジン611,621は、ピストンで駆動されるコネクテングロッドに直接、推力スクリュー610,620の回転軸を接続したものであり、ディーゼルエンジン611,621のプランジャーポンプの噴射タイミングをコントロールすることでこれら推力スクリュー610,620を正逆いずれの方向にも回転駆動可能となっている。
【0104】
そのため、これらの2軸の推力スクリュー610,620を同じ方向に同じ回転数で回転駆動すれば、船体を真っすぐに前進または後退させることが可能となるだけでなく、両者の回転数に差をつければ、左右いずれの方向にも舵をとることが可能となっている。さらに、停止した状態で2軸の推力スクリュー610,620をそれぞれ反対方向に回転させれば、定位置での船体の向きを変えることも可能となっている。
【0105】
そして、この2軸の推力スクリュー610,620による回転駆動とサイド(バウ)スラスター500の駆動を複合すれば、図19乃至図21に示すように、舵とスクリューあるいはスパンカだけでは到底実現できないか、実現に困難が伴う船体の旋回(回転)や横方向の動きを与えることが可能となるため、容易且つ正確に船体の姿勢および位置を制御することができる。
【0106】
例えば、図19に示すようにサイド(バウ)スラスター500のトンネル503内に船体の右側から左側に向けて水の流れを発生させると同時に、推力スクリュー610,620をそれぞれ反対方向に回転すると共に舵612,622を逆ハの字形にすれば、船体の中心Cを軸としてその船体を定位置で時計回りに回転動作させることができる。
【0107】
これとは反対に、図20に示すようにサイド(バウ)スラスター500のトンネル503内に船体の左側から右側に向けて水の流れを発生させると同時に、推力スクリュー610,620をそれぞれ反対方向に回転すると共に舵612,622をハの字形にすれば、船体の中心Cを軸としてその船体を定位置で反時計回りに回転動作させることができる。これによって、風や潮流によって船体が回転した場合でも簡単に元の姿勢に戻すことができる。
【0108】
また、図21に示すように、サイド(バウ)スラスター500を駆動すると共に、舵612,622を平行にした状態で推力スクリュー610,620をそれぞれ逆方向に回転させると、船体がそのままの姿勢を保ったまま真横方向に移動することになる。これによって船体が風や潮流によって真横に流された場合でもそのずれた位置から船体をそのままの姿勢を保ったまま元の位置に戻るように移動することが可能となる。
【0109】
これを実現するためには、例えば図1に示すように、姿勢検知部150からの船体の姿勢および位置信号を受けた移動体制御10がボート制御部170に指令を送り、ボート制御部170が、これらサイド(バウ)スラスター500と2軸の推力スクリュー610,620の回転方向および回転数および舵612,622などを複合して逐次制御することで容易且つ確実に達成することができる。なお、この移動体制御のための構成としては、サイドスラスター500と従来の1軸式の推進スクリューおよびスパンカーとの組み合わせたものでも良く、また、このサイドスラスター500は、船首のみならず船尾側にも設けるようにしても良い。
【0110】
次に、このような構成をした本発明に係る移動体制御装置100を用いた移動局管理システム200の実施の一形態について説明する。この移動局管理システム200は、図12に示すように前述した移動体制御装置100を備えたボートからなる移動局300と、この移動局300と通信可能な基地局400とから構成されている。
【0111】
移動局300は、図13に示すように図1に示したような構成に加え、基地局400と無線通信するための通信部310を備えた構成になっている。この通信部310は、アナログ無線またはデジタル無線のような海洋無線や携帯電話網などの公知の通信設備をそのまま利用することができ、基地局400との間で各種データを送受信する機能を有している。
【0112】
基地局400は、地上の建物内などに設置されており、図14に示すようにGPS信号受信部410と、位置算定部420と、誤差計算部430と、通信部440とから主に構成されている。
【0113】
GPS信号受信部410は、その地図上の位置(緯度、経度)が予め正確に判明している場所(地上)に設置(固定)されたGPSアンテナから構成されており、その天空上のGPS衛星から発信されるGPS信号を受信して位置算定部420に送る機能を有する。
【0114】
位置算定部420は、このGPS信号受信部410で受信したGPS信号に基づいてその基地局400の位置を算出して誤差計算部430に送る機能を有する。
【0115】
誤差計算部430は、この位置算出部420で算出した基地局400の計算位置と実際の位置との誤差値を算出してその誤差値を通信部440に送る機能を有する。
【0116】
通信部440は、この誤差計算部430で算出したGPS位置情報の誤差値に関する情報を移動局300に送信する機能を有すると共に移動局300から送られる各種データを受信する機能を有する。また、さらにこの通信部440は、必要に応じて地図データや天気に関する任意の各種データを移動局300に送信する機能も有する。
【0117】
これらの機能を有する基地局400も具体的には図15に示すように電子計算機(コンピュータ:情報処理システム)を中心に構成されており、CPU(演算装置)101、CLC(クロック)102、ROM(読出専用メモリ)103、RAM(主記憶装置)104、バス105、I/F(入出力インターフェース)106、入力装置107、表示装置108、外部記憶装置109、GPSアンテナA、通信装置450などからなるハードウェアと、ROM103に予め記録された専用の制御プログラム(ソフトウェア)とが協働することによって図14に示した各部410乃至440の機能を実現する。
【0118】
図16は、このような構成をした移動局管理システム200における移動局300(移動体制御装置100)の処理の流れを示したものであり、図3で説明したステップS101からステップS110およびステップS120との間に新たにステップS111を加えたものである。
【0119】
すなわち、前述した図3で示すステップS101からステップS110までの処理によってボートBTの船首位置および船尾位置をそれぞれ決定したならば、ステップS111に移行し、基地局400から移動局300に送られてきた誤差値情報に基づいてそれぞれの決定位置を修正する。そしてこの誤差値に基づいてボートBTの船首位置および船尾位置を修正したならば、ステップS120以降は前述の処理(図3)と同様な処理を行うことになる。
【0120】
このように本発明の移動局管理システム200は、移動局300と基地局400とを通信可能とし、地上に設置された基地局400で計測された正確な位置情報の誤差値を随時移動局300に送るようにしたため、その移動局300のGPS測定値に誤差が生じていてもその誤差を基地局400から移動局300に知らせることができるため、移動局300はその誤差を修生した正確な位置および姿勢を求めることができる。
【0121】
また、移動局300の移動体制御装置100は、移動局300で受信したGPS信号の識別情報を基地局400に送信し、基地局400は受信したGPS信号のうち、移動局300で受信したGPS信号と共通するGPS信号に基づいて誤差値を算出するようにしても良い。また、この誤差の計算は移動局300側で行っても良い。また、GPS信号の受信状況は、地上にある基地局400よりも、電波を遮ることがない海洋上にある移動局300のほうが遙かに優れている。そのため、基地局400は、その位置算出に際して移動局300で受信したGPS信号を用いるようにしても良い。
【0122】
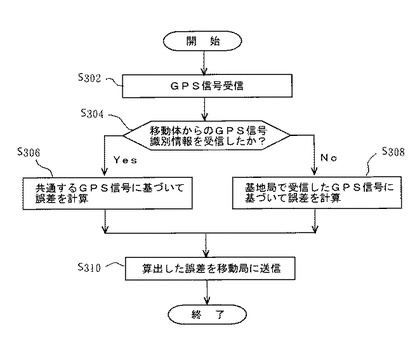
図17は、基地局400におけるこの誤差値の送信処理の流れを示したものである。先ず、基地局400は最初のステップS302においてGPS信号を受信したならば、次のステップS304に移行し、移動局300からのGPS信号識別情報を受信したか否かを判断する。すなわち、GPS信号にはGPS衛星ごとに割り当てられた識別情報が含まれており、移動局300は受信した全てのGPS信号の識別情報を通信部440を介して基地局400に送信する。
【0123】
ステップS304での判断の結果、識別情報を受信したと判断したとき(Yes)はステップS306に移行して基地局400で受信したGPS信号のうち共通するGPS信号に基づいて誤差を計算してステップS310に移行する。一方、識別情報を受信していないと判断したとき(No)はステップS308に移行して基地局400で受信したGPS信号のみに基づいて誤差を計算してステップS310に移行する。そして、ステップS310では、このようにして算出した誤差を移動局300に送信して処理を終了する。
【0124】
このように移動局300で受信したGPS信号と共通するGPS信号に基づいて誤差値を算出するようにすれば、移動局300と基地局400とが離れていたりして相互に受信するGPS信号が一部異なっている場合でも、正確な誤差を算出して移動局に知らせることができる。つまり、移動局300と基地局400とが離れていたりして相互に受信するGPS信号が一部異なっている場合には、基地局400での測定誤差がそのまま移動局300での測定誤差と一致しないことがある。この場合に、そのまま基地局400での測定誤差を移動局300に送っても正確な位置を求めることができないが、このように共通するGPS信号に基づいて基地局400の位置を算出すれば共通した正確な誤差値を移動局30に知らせることができる。
【0125】
また、基地局400は、移動局300の要求に応じて所定の地図(海図)情報を移動局に提供する地図情報提供手段をさらに備えていればなお良い。このような地図情報提供手段を備えておけば、移動局300は地図情報を持つ必要がなくなり、また、常に最新の地図情報を基地局400から取得することができる。なお、この地図(海図)情報は、緯度、経度のみだけでなく海面の高さを基準とする高低情報も含むものであって良い。
【符号の説明】
【0126】
100…移動体制御装置
101…演算装置(CPU)
102…クロック(CLC)
103…読出専用メモリ(ROM)
104…主記憶装置(RAM)
105…バス
106…入出力インターフェース
107…入力装置
108…表示装置
109…記憶装置
110…位置算定部
120…算定位置記憶部
130…移動判断部
140…位置決定部
150…姿勢検出部
160…移動体制御部
170…ボート制御部
180…入力部
190…表示部
200…移動局管理システム
300…移動局
310…通信部
400…基地局
410…GPS信号受信部
420…位置算定部
430…誤差計算部
440…通信部
450…通信装置
500…サイド(バウ)スラスター
610,620…(2軸の)推進スクリュー
612,622…舵
A…GPS受信部
A1…第1のGPS受信部
A2…第2のGPS受信部
A3…潮流計
BT…ボート(移動体)
【特許請求の範囲】
【請求項1】
人工衛星から発信されるGPS信号に基づいて移動体を制御する移動体制御装置であって、
前記移動体の第1の位置測定点に取り付けられて前記GPS信号を連続的に受信する第1のGPS信号受信手段と、
前記移動体に前記第1の位置測定点よりも所定距離離れた第2の位置測定点に取り付けられて前記GPS信号を連続的に受信する第2のGPS信号受信手段と、
当該第1および第2のGPS信号受信手段で受信したGPS信号に基づいて所定時間ごとに前記移動体の第1および第2の位置測定点を算定する位置算定手段と、
当該位置算定手段で算定された所定時間ごとの前記各位置測定点の算定位置を記憶する算定位置記憶手段と、
当該算定位置記憶手段で記憶された前記各位置測定点ごとの算定位置同士の広がり具合に基づいて前記各位置測定点の停止または移動を判断する移動判断手段と、
当該移動判断手段で前記各位置測定点が移動したと判断したときに前記各位置測定点の位置を決定する位置決定手段と、
当該位置決定手段で決定された前記各位置測定点の位置に基づいて前記移動体の姿勢および位置を検出する姿勢検出手段と、
当該姿勢検出手段で検出した前記移動体の姿勢および位置に基づいて前記移動体の姿勢および位置を任意に制御する移動体制御手段と、を備えたことを特徴とする移動体制御装置。
【請求項2】
請求項1に記載の移動体制御装置において、
前記移動判断手段は、
前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径内であるときは前記位置測定点が停止していると判断し、
前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径を外れたときに前記位置測定点が移動したと判断することを特徴とする移動体制御装置。
【請求項3】
請求項2に記載の移動体制御装置において、
前記移動判断手段における前記基準算定位置から所定半径は、前記GPS信号受信の際のHDOPの値に基づいて決定することを特徴とする移動体制御装置。
【請求項4】
請求項2または3に記載の移動体制御装置において、
前記移動判断手段における前記基準算定位置から所定半径は、最尤法(Maximum likelihood estimation)により決定することを特徴とする移動体制御装置。
【請求項5】
請求項1乃至4のいずれかに記載の移動体制御装置において、
前記移動体は船体であり、
移動体制御手段は、前記船体の船首側に設けられたサイドスラスターを有することを特徴とする移動体制御装置。
【請求項6】
請求項1乃至5のいずれかに記載の移動体制御装置において、
前記移動体は船体であり、
移動体制御手段は、前記船体の船尾に設けられてそれぞれ独立して駆動する2軸の推力スクリューを有することを特徴とする移動体制御装置。
【請求項7】
互いに通信可能な移動局と基地局とを有する移動局管理システムであって、
前記移動局は、
前記請求項1乃至6のいずれかの移動体制御装置と、前記基地局と通信する通信手段を備え、
前記基地局は、
人工衛星から発信されるGPS信号を地上の固定点で受信するGPS信号受信手段と、当該GPS信号受信手段で受信したGPS信号に基づいて当該基地局の位置を算出する位置算出手段と、当該位置算出手段で算出した当該基地局の計算位置と実際の位置との誤差値を算出する誤差計算手段と、当該誤差計算手段で算出した誤差値を前記基地局に送信する通信手段とを備え、
前記移動局の移動体制御装置は、前記基地局から送信された誤差値に基づいて前記位置決定手段で決定した前記各位置測定点の位置を修正することを特徴とする移動局管理システム。
【請求項8】
請求項7の移動局管理システムにおいて、
前記移動局の移動体制御装置は、前記移動局で受信したGPS信号の識別情報を前記通信手段によって前記基地局に送信し、
前記基地局または前記移動局の位置算出手段は、前記基地局で受信したGPS信号のうち、前記移動局で受信したGPS信号と共通するGPS信号に基づいて前記誤差値を算出することを特徴とする移動局管理システム。
【請求項9】
請求項7または8の移動局管理システムにおいて、
前記基地局は、前記移動局の要求に応じて所定の地図情報を当該移動局に提供する地図情報提供手段をさらに備えていることを特徴とする移動局管理システム。
【請求項10】
人工衛星から発信されるGPS信号に基づいて移動体を制御する移動体制御方法であって、
前記移動体の第1の位置測定点に取り付けられた第1の第1のGPSアンテナによって前記GPS信号を連続的に受信する第1のGPS信号受信ステップと、
前記移動体に前記第1の位置測定点よりも所定距離離れた第2の位置測定点に取り付けられた第2のGPSアンテナによって前記GPS信号を連続的に受信する第2のGPS信号受信ステップと、
当該第1および第2のGPS信号受信ステップで受信したGPS信号に基づいて所定時間ごとに前記移動体の第1および第2の位置測定点を算定する位置算定ステップと、
当該位置算定ステップで算定された所定時間ごとの前記各位置測定点の算定位置を記憶する算定位置記憶ステップと、
当該算定位置記憶ステップで記憶された前記各位置測定点ごとの算定位置同士の広がり具合に基づいて前記各位置測定点の停止または移動を判断する移動判断ステップと、
当該移動判断ステップで前記各位置測定点が移動したと判断したときに前記各位置測定点の位置を決定する位置決定ステップと、
当該位置決定ステップで決定された前記各位置測定点の位置に基づいて前記移動体の姿勢および位置を検出する姿勢検出ステップと、
当該姿勢検出ステップで検出した前記移動体の姿勢および位置に基づいて前記移動体の姿勢および位置を任意に制御する移動体制御ステップと、を含むことを特徴とする移動体制御方法。
【請求項11】
請求項10に記載の移動体制御方法において、
前記移動判断ステップでは、
前記算定位置記憶ステップで記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径内であるときは前記位置測定点が停止していると判断し、
前記算定位置記憶ステップで記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径を外れたときに前記位置測定点が移動したと判断することを特徴とする移動体制御方法。
【請求項12】
請求項11に記載の移動体制御方法において、
前記移動判断ステップにおける前記基準算定位置から所定半径は、前記GPS信号受信の際のHDOPの値に基づいて決定することを特徴とする移動体制御方法。
【請求項13】
請求項10または11に記載の移動体制御方法において、
前記移動判断手段における前記基準算定位置から所定半径は、最尤法(Maximum likelihood estimation)により決定することを特徴とする移動体制御方法。
【請求項14】
互いに通信可能な移動局と基地局とを有する移動局管理方法であって、
前記移動局は、
前記請求項1乃至6のいずれかの移動体制御装置と、前記基地局と通信する通信手段を備え、
前記基地局は、
人工衛星から発信されるGPS信号を地上の固定点で受信するGPS信号受信ステップと、当該GPS信号受信ステップで受信したGPS信号に基づいて当該基地局の位置を算出する位置算出ステップと、当該位置算出ステップで算出した当該基地局の計算位置と実際の位置との誤差値を算出する誤差計算ステップと、当該誤差計算ステップで算出した誤差値を前記基地局に送信する通信ステップとを備え、
前記移動局の移動体制御装置は、前記基地局に送信された誤差値に基づいて前記位置決定手段で決定した前記各位置測定点の位置を修正することを特徴とする移動局管理方法。
【請求項15】
請求項14の移動局管理方法において、
前記移動局の移動体制御装置は、前記移動局で受信したGPS信号の識別情報を前記通信手段によって前記基地局に送信し、
前記基地局または前記移動局の位置算出ステップでは、前記基地局で受信したGPS信号のうち、前記移動局で受信したGPS信号と共通するGPS信号に基づいて前記誤差値を算出することを特徴とする移動局管理方法。
【請求項16】
請求項14または15の移動局管理方法において、
前記基地局は、前記移動局の要求に応じて所定の地図情報を当該移動局に提供する地図情報提供手段をさらに備えていることを特徴とする移動局管理方法。
【請求項17】
人工衛星から発信されるGPS信号に基づいて移動体を制御する移動体制御プログラムであって、
コンピュータを、
前記移動体の第1の位置測定点に取り付けられて前記GPS信号を連続的に受信する第1のGPS信号受信手段と、
前記移動体に前記第1の位置測定点よりも所定距離離れた第2の位置測定点に取り付けられて前記GPS信号を連続的に受信する第2のGPS信号受信手段と、
当該第1および第2のGPS信号受信手段で受信したGPS信号に基づいて所定時間ごとに前記移動体の第1および第2の位置測定点を算定する位置算定手段と、
当該位置算定手段で算定された所定時間ごとの前記各位置測定点の算定位置を記憶する算定位置記憶手段と、
当該算定位置記憶手段で記憶された前記各位置測定点ごとの算定位置同士の広がり具合に基づいて前記各位置測定点の停止または移動を判断する移動判断手段と、
当該移動判断手段で前記各位置測定点が移動したと判断したときに前記各位置測定点の位置を決定する位置決定手段と、
当該位置決定手段で決定された前記各位置測定点の位置に基づいて前記移動体の姿勢および位置を検出する姿勢検出手段と、
当該姿勢検出手段で検出した前記移動体の姿勢および位置に基づいて前記移動体の姿勢および位置を任意に制御する移動体制御手段と、して機能させることを特徴とする移動体制御プログラム。
【請求項18】
請求項17に記載の移動体制御プログラムにおいて、
前記コンピュータで機能する前記移動判断手段は、
前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径内であるときは前記位置測定点が停止していると判断し、
前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径を外れたときに前記位置測定点が移動したと判断することを特徴とする移動体制御プログラム。
【請求項19】
請求項18に記載の移動体制御プログラムにおいて、
前記移動判断手段における前記基準算定位置から所定半径は、前記GPS信号受信の際のHDOPの値に基づいて決定することを特徴とする移動体制御プログラム。
【請求項20】
請求項18または19に記載の移動体制御プログラムにおいて、
前記移動判断手段における前記基準算定位置から所定半径は、最尤法(Maximum likelihood estimation)により決定することを特徴とする移動体制御プログラム。
【請求項21】
互いに通信可能な移動局と基地局とを有する移動局管理プログラムであって、
前記移動局のコンピュータを、
前記請求項1乃至5のいずれかの移動体制御装置と、前記基地局と通信する通信手段として機能させ、
前記基地局のコンピュータを、
人工衛星から発信されるGPS信号を地上の固定点で受信するGPS信号受信手段と、当該GPS信号受信手段で受信したGPS信号に基づいて当該基地局の位置を算出する位置算出手段と、当該位置算出手段で算出した当該基地局の計算位置と実際の位置との誤差値を算出する誤差計算手段と、当該誤差計算手段で算出した誤差値を前記基地局に送信する通信手段として機能させ、
前記移動局の移動体制御装置を、前記基地局に送信された誤差値に基づいて前記位置決定手段で決定した前記各位置測定点の位置を修正するように機能させることを特徴とする移動局管理システム。
【請求項22】
請求項21の移動局管理プログラムにおいて、
前記移動局の移動体制御装置を、前記移動局で受信したGPS信号の識別情報を前記通信手段によって前記基地局に送信するように機能させ、
前記基地局または前記移動局の位置算出手段を、前記基地局で受信したGPS信号のうち、前記移動局で受信したGPS信号と共通するGPS信号に基づいて前記誤差値を算出するように機能させることを特徴とする移動局管理プログラム。
【請求項23】
請求項21または22の移動局管理プログラムにおいて、
前記基地局を、前記移動局の要求に応じて所定の地図情報を当該移動局に提供する地図情報提供手段としてさらに機能させることを特徴とする移動局管理プログラム。
【請求項1】
人工衛星から発信されるGPS信号に基づいて移動体を制御する移動体制御装置であって、
前記移動体の第1の位置測定点に取り付けられて前記GPS信号を連続的に受信する第1のGPS信号受信手段と、
前記移動体に前記第1の位置測定点よりも所定距離離れた第2の位置測定点に取り付けられて前記GPS信号を連続的に受信する第2のGPS信号受信手段と、
当該第1および第2のGPS信号受信手段で受信したGPS信号に基づいて所定時間ごとに前記移動体の第1および第2の位置測定点を算定する位置算定手段と、
当該位置算定手段で算定された所定時間ごとの前記各位置測定点の算定位置を記憶する算定位置記憶手段と、
当該算定位置記憶手段で記憶された前記各位置測定点ごとの算定位置同士の広がり具合に基づいて前記各位置測定点の停止または移動を判断する移動判断手段と、
当該移動判断手段で前記各位置測定点が移動したと判断したときに前記各位置測定点の位置を決定する位置決定手段と、
当該位置決定手段で決定された前記各位置測定点の位置に基づいて前記移動体の姿勢および位置を検出する姿勢検出手段と、
当該姿勢検出手段で検出した前記移動体の姿勢および位置に基づいて前記移動体の姿勢および位置を任意に制御する移動体制御手段と、を備えたことを特徴とする移動体制御装置。
【請求項2】
請求項1に記載の移動体制御装置において、
前記移動判断手段は、
前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径内であるときは前記位置測定点が停止していると判断し、
前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径を外れたときに前記位置測定点が移動したと判断することを特徴とする移動体制御装置。
【請求項3】
請求項2に記載の移動体制御装置において、
前記移動判断手段における前記基準算定位置から所定半径は、前記GPS信号受信の際のHDOPの値に基づいて決定することを特徴とする移動体制御装置。
【請求項4】
請求項2または3に記載の移動体制御装置において、
前記移動判断手段における前記基準算定位置から所定半径は、最尤法(Maximum likelihood estimation)により決定することを特徴とする移動体制御装置。
【請求項5】
請求項1乃至4のいずれかに記載の移動体制御装置において、
前記移動体は船体であり、
移動体制御手段は、前記船体の船首側に設けられたサイドスラスターを有することを特徴とする移動体制御装置。
【請求項6】
請求項1乃至5のいずれかに記載の移動体制御装置において、
前記移動体は船体であり、
移動体制御手段は、前記船体の船尾に設けられてそれぞれ独立して駆動する2軸の推力スクリューを有することを特徴とする移動体制御装置。
【請求項7】
互いに通信可能な移動局と基地局とを有する移動局管理システムであって、
前記移動局は、
前記請求項1乃至6のいずれかの移動体制御装置と、前記基地局と通信する通信手段を備え、
前記基地局は、
人工衛星から発信されるGPS信号を地上の固定点で受信するGPS信号受信手段と、当該GPS信号受信手段で受信したGPS信号に基づいて当該基地局の位置を算出する位置算出手段と、当該位置算出手段で算出した当該基地局の計算位置と実際の位置との誤差値を算出する誤差計算手段と、当該誤差計算手段で算出した誤差値を前記基地局に送信する通信手段とを備え、
前記移動局の移動体制御装置は、前記基地局から送信された誤差値に基づいて前記位置決定手段で決定した前記各位置測定点の位置を修正することを特徴とする移動局管理システム。
【請求項8】
請求項7の移動局管理システムにおいて、
前記移動局の移動体制御装置は、前記移動局で受信したGPS信号の識別情報を前記通信手段によって前記基地局に送信し、
前記基地局または前記移動局の位置算出手段は、前記基地局で受信したGPS信号のうち、前記移動局で受信したGPS信号と共通するGPS信号に基づいて前記誤差値を算出することを特徴とする移動局管理システム。
【請求項9】
請求項7または8の移動局管理システムにおいて、
前記基地局は、前記移動局の要求に応じて所定の地図情報を当該移動局に提供する地図情報提供手段をさらに備えていることを特徴とする移動局管理システム。
【請求項10】
人工衛星から発信されるGPS信号に基づいて移動体を制御する移動体制御方法であって、
前記移動体の第1の位置測定点に取り付けられた第1の第1のGPSアンテナによって前記GPS信号を連続的に受信する第1のGPS信号受信ステップと、
前記移動体に前記第1の位置測定点よりも所定距離離れた第2の位置測定点に取り付けられた第2のGPSアンテナによって前記GPS信号を連続的に受信する第2のGPS信号受信ステップと、
当該第1および第2のGPS信号受信ステップで受信したGPS信号に基づいて所定時間ごとに前記移動体の第1および第2の位置測定点を算定する位置算定ステップと、
当該位置算定ステップで算定された所定時間ごとの前記各位置測定点の算定位置を記憶する算定位置記憶ステップと、
当該算定位置記憶ステップで記憶された前記各位置測定点ごとの算定位置同士の広がり具合に基づいて前記各位置測定点の停止または移動を判断する移動判断ステップと、
当該移動判断ステップで前記各位置測定点が移動したと判断したときに前記各位置測定点の位置を決定する位置決定ステップと、
当該位置決定ステップで決定された前記各位置測定点の位置に基づいて前記移動体の姿勢および位置を検出する姿勢検出ステップと、
当該姿勢検出ステップで検出した前記移動体の姿勢および位置に基づいて前記移動体の姿勢および位置を任意に制御する移動体制御ステップと、を含むことを特徴とする移動体制御方法。
【請求項11】
請求項10に記載の移動体制御方法において、
前記移動判断ステップでは、
前記算定位置記憶ステップで記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径内であるときは前記位置測定点が停止していると判断し、
前記算定位置記憶ステップで記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径を外れたときに前記位置測定点が移動したと判断することを特徴とする移動体制御方法。
【請求項12】
請求項11に記載の移動体制御方法において、
前記移動判断ステップにおける前記基準算定位置から所定半径は、前記GPS信号受信の際のHDOPの値に基づいて決定することを特徴とする移動体制御方法。
【請求項13】
請求項10または11に記載の移動体制御方法において、
前記移動判断手段における前記基準算定位置から所定半径は、最尤法(Maximum likelihood estimation)により決定することを特徴とする移動体制御方法。
【請求項14】
互いに通信可能な移動局と基地局とを有する移動局管理方法であって、
前記移動局は、
前記請求項1乃至6のいずれかの移動体制御装置と、前記基地局と通信する通信手段を備え、
前記基地局は、
人工衛星から発信されるGPS信号を地上の固定点で受信するGPS信号受信ステップと、当該GPS信号受信ステップで受信したGPS信号に基づいて当該基地局の位置を算出する位置算出ステップと、当該位置算出ステップで算出した当該基地局の計算位置と実際の位置との誤差値を算出する誤差計算ステップと、当該誤差計算ステップで算出した誤差値を前記基地局に送信する通信ステップとを備え、
前記移動局の移動体制御装置は、前記基地局に送信された誤差値に基づいて前記位置決定手段で決定した前記各位置測定点の位置を修正することを特徴とする移動局管理方法。
【請求項15】
請求項14の移動局管理方法において、
前記移動局の移動体制御装置は、前記移動局で受信したGPS信号の識別情報を前記通信手段によって前記基地局に送信し、
前記基地局または前記移動局の位置算出ステップでは、前記基地局で受信したGPS信号のうち、前記移動局で受信したGPS信号と共通するGPS信号に基づいて前記誤差値を算出することを特徴とする移動局管理方法。
【請求項16】
請求項14または15の移動局管理方法において、
前記基地局は、前記移動局の要求に応じて所定の地図情報を当該移動局に提供する地図情報提供手段をさらに備えていることを特徴とする移動局管理方法。
【請求項17】
人工衛星から発信されるGPS信号に基づいて移動体を制御する移動体制御プログラムであって、
コンピュータを、
前記移動体の第1の位置測定点に取り付けられて前記GPS信号を連続的に受信する第1のGPS信号受信手段と、
前記移動体に前記第1の位置測定点よりも所定距離離れた第2の位置測定点に取り付けられて前記GPS信号を連続的に受信する第2のGPS信号受信手段と、
当該第1および第2のGPS信号受信手段で受信したGPS信号に基づいて所定時間ごとに前記移動体の第1および第2の位置測定点を算定する位置算定手段と、
当該位置算定手段で算定された所定時間ごとの前記各位置測定点の算定位置を記憶する算定位置記憶手段と、
当該算定位置記憶手段で記憶された前記各位置測定点ごとの算定位置同士の広がり具合に基づいて前記各位置測定点の停止または移動を判断する移動判断手段と、
当該移動判断手段で前記各位置測定点が移動したと判断したときに前記各位置測定点の位置を決定する位置決定手段と、
当該位置決定手段で決定された前記各位置測定点の位置に基づいて前記移動体の姿勢および位置を検出する姿勢検出手段と、
当該姿勢検出手段で検出した前記移動体の姿勢および位置に基づいて前記移動体の姿勢および位置を任意に制御する移動体制御手段と、して機能させることを特徴とする移動体制御プログラム。
【請求項18】
請求項17に記載の移動体制御プログラムにおいて、
前記コンピュータで機能する前記移動判断手段は、
前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径内であるときは前記位置測定点が停止していると判断し、
前記算定位置記憶手段で記憶された所定の算定位置を基準算定位置とし、当該基準算定位置を記憶した後に記憶される他の算定位置が前記基準算定位置から所定半径を外れたときに前記位置測定点が移動したと判断することを特徴とする移動体制御プログラム。
【請求項19】
請求項18に記載の移動体制御プログラムにおいて、
前記移動判断手段における前記基準算定位置から所定半径は、前記GPS信号受信の際のHDOPの値に基づいて決定することを特徴とする移動体制御プログラム。
【請求項20】
請求項18または19に記載の移動体制御プログラムにおいて、
前記移動判断手段における前記基準算定位置から所定半径は、最尤法(Maximum likelihood estimation)により決定することを特徴とする移動体制御プログラム。
【請求項21】
互いに通信可能な移動局と基地局とを有する移動局管理プログラムであって、
前記移動局のコンピュータを、
前記請求項1乃至5のいずれかの移動体制御装置と、前記基地局と通信する通信手段として機能させ、
前記基地局のコンピュータを、
人工衛星から発信されるGPS信号を地上の固定点で受信するGPS信号受信手段と、当該GPS信号受信手段で受信したGPS信号に基づいて当該基地局の位置を算出する位置算出手段と、当該位置算出手段で算出した当該基地局の計算位置と実際の位置との誤差値を算出する誤差計算手段と、当該誤差計算手段で算出した誤差値を前記基地局に送信する通信手段として機能させ、
前記移動局の移動体制御装置を、前記基地局に送信された誤差値に基づいて前記位置決定手段で決定した前記各位置測定点の位置を修正するように機能させることを特徴とする移動局管理システム。
【請求項22】
請求項21の移動局管理プログラムにおいて、
前記移動局の移動体制御装置を、前記移動局で受信したGPS信号の識別情報を前記通信手段によって前記基地局に送信するように機能させ、
前記基地局または前記移動局の位置算出手段を、前記基地局で受信したGPS信号のうち、前記移動局で受信したGPS信号と共通するGPS信号に基づいて前記誤差値を算出するように機能させることを特徴とする移動局管理プログラム。
【請求項23】
請求項21または22の移動局管理プログラムにおいて、
前記基地局を、前記移動局の要求に応じて所定の地図情報を当該移動局に提供する地図情報提供手段としてさらに機能させることを特徴とする移動局管理プログラム。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】

【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2012−185154(P2012−185154A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2012−24820(P2012−24820)
【出願日】平成24年2月8日(2012.2.8)
【出願人】(595167292)株式会社デージーエス・コンピュータ (18)
【出願人】(511039706)株式会社ドナウホールディングス (1)
【Fターム(参考)】
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成24年2月8日(2012.2.8)
【出願人】(595167292)株式会社デージーエス・コンピュータ (18)
【出願人】(511039706)株式会社ドナウホールディングス (1)
【Fターム(参考)】
[ Back to top ]