
GPS受信機の時刻決定方法
【課題】 ホットスタート時におけるTTFFを短くする。
【解決手段】 RTCの時刻から所定の範囲にある時刻を候補時刻とし、この候補時刻における衛星の位置をエフェメリスデータに基づいて算出し、算出した衛星の位置に基づいて、前回の測位位置と衛星との距離を算出する。続いて、算出した距離に基づいて、候補時刻に対する衛星からの送信時刻を算出し、送信時刻における衛星の位置を算出して、算出した衛星の位置と前回の測位位置とに基づいて衛星受信機間距離を算出する。次に、衛星受信機間距離の1ミリ秒以下の桁に対応する部分と、衛星から実際に受信した擬似距離の1ミリ秒以下の部分との差を擬似距離残差とし、各衛星の擬似距離残差を算出して測位させ、その測位位置での擬似距離残差を求め、その標準偏差が小さい候補時刻を割り出す。
【解決手段】 RTCの時刻から所定の範囲にある時刻を候補時刻とし、この候補時刻における衛星の位置をエフェメリスデータに基づいて算出し、算出した衛星の位置に基づいて、前回の測位位置と衛星との距離を算出する。続いて、算出した距離に基づいて、候補時刻に対する衛星からの送信時刻を算出し、送信時刻における衛星の位置を算出して、算出した衛星の位置と前回の測位位置とに基づいて衛星受信機間距離を算出する。次に、衛星受信機間距離の1ミリ秒以下の桁に対応する部分と、衛星から実際に受信した擬似距離の1ミリ秒以下の部分との差を擬似距離残差とし、各衛星の擬似距離残差を算出して測位させ、その測位位置での擬似距離残差を求め、その標準偏差が小さい候補時刻を割り出す。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、GPS(Global Positioning System)による測位のホットスタート時において、GPS受信機の正しい・真の時刻を推定、決定するGPS受信機の時刻決定方法に関する。
【背景技術】
【0002】
例えば、GPSによるカーナビゲーションにおいて、一時的に自動車を駐車などしてカーナビゲーションを停止し、再度カーナビゲーションを開始する場合、GPS受信機において測位を開始する。このような状況での測位開始をホットスタートといい、GPS受信機には、前回の測位位置、RTC(Real−Time Clock)の時刻、エフェメリスデータなどが保有され、従来、次のようにして測位を算出していた。ここで、RTCの時刻とは、前回の測位の時刻からGPS受信機側で独自に進んだ時刻であり、真の時刻に対しておおよその時刻を示し、また、航法データを復調することで、正確な信号送信時刻が得られる。
【0003】
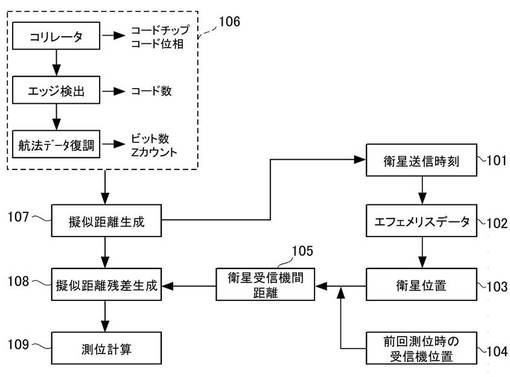
まず、図4に示すように、衛星の送信時刻(101)とエフェメリスデータ(102)とに基づいて衛星の位置(103)を算出し、算出した衛星位置(103)と前回測位したときのGPS受信機の位置(104)とに基づいて、衛星とGPS受信機との距離(105)を算出する。一方、衛星から受信した航法データに基づいて、衛星とGPS受信機との擬似距離を生成する(106、107)。
【0004】
すなわち、擬似距離ρ(t)は、次式で表される。
ρ(t)=c[tu−ts]
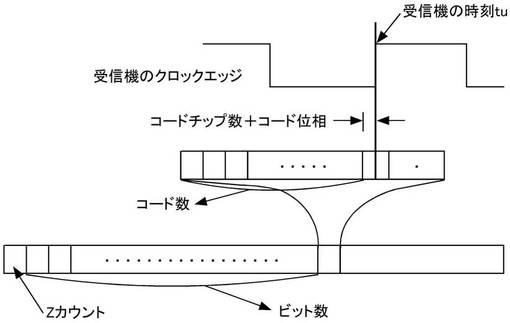
ここで、tuはGPS受信器の受信時刻、tsは衛星の送信時刻、cは光速であり、さらに、tsは、図5に示すように、Zカウント、航法データのビット数、コード数、コードチップ数およびコードチップの位相を加算したものとなる。そして、擬似距離を生成するには、まず、コリレータによってコードチップとコード位相とを検出し、次に、エッジ検出によってコード数を検出し、さらに、航法データを復調してビット数とZカウントとを取得して、衛星の送信時刻tsを生成し、この送信時刻tsと受信器の受信時刻tuとの差から擬似距離を算出する。次に、算出した衛星受信機距離(105)と生成した擬似距離(107)との差である擬似距離残差を算出・生成する(108)。そして、この擬似距離残差を用いて、最小二乗法によりGPS受信機の位置を算出する(109)ものである。
【0005】
また、受信不可能なGPS信号をサーチしないことにより、初回の測位開始から測位までに要する時間、つまりTTFF(Time To First Fix)を短くすることが可能、という技術が知られている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−303663号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、従来のホットスタート時における測位方法では、航法データのすべてを解読・解析して擬似距離を生成しなければならない。すなわち、上記のように、コードチップとコード位相の検出を行った後に、エッジの検出や航法データの復調などを行わなければならない。さらに、生成した擬似距離と算出した衛星受信機距離との差から擬似距離残差を生成しなければならないため、解読や生成に時間を要する。このため、TTFFが長くなるという問題があった。一方、GPS受信機の正しい・真の時刻が短時間にわかれば、ホットスタート時におけるGPS受信機の測位を短時間に算出すること、つまりTTFFを短くすることが可能となる。
【0008】
そこでこの発明は、ホットスタート時におけるTTFFを短くすることが可能なGPS受信機の時刻決定方法を提供することを目的としている。
【課題を解決するための手段】
【0009】
上記目的を達成するために請求項1に記載の発明は、GPS受信機に、GPS受信機の前回の測位位置、リアルタイムクロックの時刻およびエフェメリスデータが保有されている時に、GPS受信機の正しい時刻を決定するGPS受信機の時刻決定方法であって、
リアルタイムクロックの時刻から所定の範囲にある時刻を候補時刻とし、この候補時刻における衛星の位置をエフェメリスデータに基づいて算出し、
算出した衛星の位置に基づいて、前回の測位位置と衛星との距離を算出し、
算出した距離に基づいて、前記候補時刻に対する衛星からの送信時刻を算出し、
算出した送信時刻における衛星の位置を算出して、算出した衛星の位置と前回の測位位置とに基づいて衛星受信機間距離を算出し、
算出した衛星受信機間距離の1ミリ秒以下の桁に対応する部分と、衛星から実際に受信した擬似距離(航法データ)の1ミリ秒以下の部分(コードチップ)との差を擬似距離残差とし、各衛星の擬似距離残差を算出して最小二乗法によりGPS受信機の位置を算出し、その測位位置での擬似距離残差を求め、その標準偏差が小さい候補時刻を割り出してGPS受信機の正しい時刻とする、ことを特徴とする。
【0010】
この発明によれば、候補時刻に対する各衛星受信機間距離を算出し、算出した各衛星受信機間距離と各衛星から受信した擬似距離との1ミリ秒以下の部分から、各衛星の擬似距離残差を算出する。このような算出を複数の候補時刻に対して行い、各衛星の擬似距離残差の偏差(バラツキ)が小さい候補時刻をGPS受信機の正しい時刻とする。
【発明の効果】
【0011】
請求項1に記載の発明によれば、候補時刻に対する各衛星受信機間距離を算出し、衛星受信機間距離の1ミリ秒以下の桁に対応する部分と、衛星から実際に受信した擬似距離の1ミリ秒以下の部分とから擬似距離残差を算出する。このため、衛星から受信する擬似距離(航法データ)のすべてを解読・解析する必要がなく、1ミリ秒以下の部分、つまりコードチップのみを受信した時点で擬似距離残差を算出することができる。また、擬似距離残差の算出を複数の候補時刻に対して行い、各衛星の擬似距離残差の偏差が小さい候補時刻をGPS受信機の正しい時刻とするため、高い精度・所望の精度で正しい時刻を得ることが可能となる。これらの結果、GPS受信機の正しい時刻を短時間で算出することが可能となり、得られた正しい時刻を用いることで、ホットスタート時におけるGPS受信機の測位を短時間に行うこと、つまりTTFFを短くすることが可能となる。
【図面の簡単な説明】
【0012】
【図1】この発明の実施の形態に係るGPS受信機の時刻決定方法を利用したホットスタート時における受信機の測位方法を示す概略フローチャートである。
【図2】図1の測位方法とGPS受信機で保有するデータなどとの関係を示す概略構成ブロック図である。
【図3】この発明の実施の形態に係るGPS受信機の時刻決定方法を示すフローチャートである。
【図4】従来のホットスタート時における測位方法を示す概略構成ブロック図である。
【図5】衛星から受信する擬似距離のデータ構成とGPS受信機のクロックとの関係を示す図である。
【発明を実施するための形態】
【0013】
以下、この発明を図示の実施の形態に基づいて説明する。
【0014】
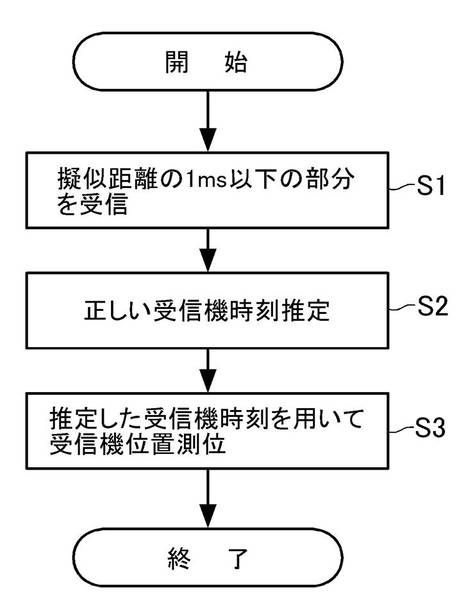
まず、この発明の実施の形態に係るGPS受信機の時刻決定方法を利用した、ホットスタート時におけるGPS受信機の測位方法について、その概略を説明する。この測位方法では、GPS受信機に、GPS受信機(ユーザ)の前回の測位位置、リアルタイムクロック(RTC)の時刻およびエフェメリスデータが保有、記憶されていることを前提とし、まず、図1に示すように、衛星から擬似距離の1ms(ミリ秒)以下の部分を受信する(ステップS1)。つまり、衛星から航法データのコードチップ以下の部分を受信する。
【0015】
次に、後述する時刻決定方法に従って、GPS受信機の正しい時刻を推定、決定し(ステップS2)、さらに、この時刻に基づいてGPS受信機の測位を算出する(ステップS3)ものである。
【0016】
ここで、ホットスタート時における測位方法の概略について、GPS受信機で保有するデータなどとの関係に基づいて説明する。まず、図2に示すように、RTCの時刻D1に基づいてGPS受信機の時刻を仮定し(ステップS11)、仮定した受信機時刻とエフェメリスデータD2とに基づいて衛星の位置を算出する(ステップS12)。次に、算出した衛星位置と前回測位したときのGPS受信機の位置D3とに基づいて、衛星とGPS受信機との距離を算出し、さらに、算出した衛星受信機間距離の1ms以下の桁に対応する部分を算出・抽出する(ステップS13)。
【0017】
一方、衛星から実際に受信した擬似距離の1ms以下の部分を生成する(ステップS14、15)。すなわち、コリレータによって航法データのコードチップとコード位相とを検出する。次に、ステップS13で算出した衛星受信機間距離の1ms以下の部分と、ステップS15で算出した擬似距離の1ms以下の部分との差である擬似距離残差を生成する(ステップS16)。そして、この擬似距離残差に基づいてGPS受信機の測位を算出する(ステップS17)ものである。
【0018】
次に、GPS受信機の時刻決定方法について、具体的に説明する。ここで、前提条件として、GPS受信機の正しい時刻は、RTCの時刻から所定の範囲内、具体的には、RTCの時刻の±5秒の範囲内に存在するものとし、目標精度を±10msとする。また、目標の測位精度を30m、想定するHDOPを1.5とし、目標の擬似距離精度を20mとする。一方、最大ドップラー周波数を5kHzとし、最大擬似距離変化率を950m/sとする。そして、目標の擬似距離精度が20mとなる時間は、20/950=21msであり、マージンを考慮して10msとする。
【0019】
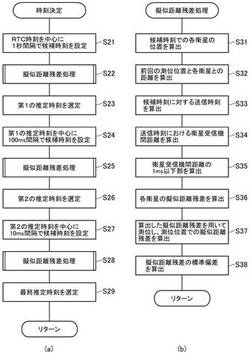
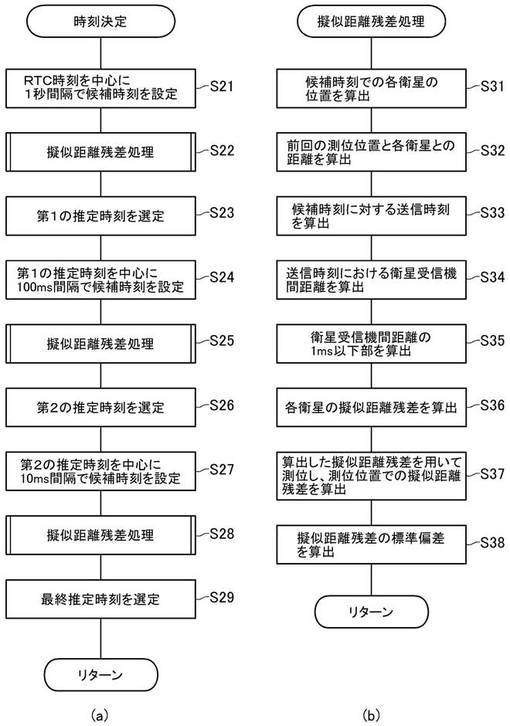
まず、図3に示すように、RTCの時刻から所定の範囲内にある時刻を候補時刻として設定する(ステップS21)。すなわち、RTCで読み取った時刻の小数部を丸めて(四捨五入等して)整数秒t0とし、このRTCの時刻t0を中心として±5秒の範囲内で、1秒間隔で候補時刻t0―k(k=−5、−4…+4、+5)を設定する。次に、各候補時刻t0―kに対して、擬似距離残差処理を行う(ステップS22)。
【0020】
具体的には、候補時刻t0―kにおける各衛星iの位置riを、エフェメリスデータに基づいて算出する(ステップS31)。なお、この算出は、既知の算出式によって行う。
【数1】

【0021】
次に、ステップS31で算出した衛星の位置riに基づいて、GPS受信機の前回の測位位置と各衛星iとの距離di(t0―k)を算出する(ステップS32)。続いて、ステップS32で算出した距離di(t0―k)に基づいて、候補時刻t0―kに対する各衛星iからの送信時刻tk´を、次式に基づいて算出する(ステップS33)。
【数2】
ここで、cは、光速を示す。
【0022】
次に、送信時刻tk´における各衛星iの位置ri(tk´)を算出し、さらに、算出した衛星の位置ri(tk´)とGPS受信機の前回の測位位置とに基づいて、各衛星iの衛星受信機間距離di(tk´)を算出する(ステップS34)。すなわち、衛星iの位置ri(tk´)は次の数3で表され、GPS受信機の前回の測位位置X0を(x0、y0、z0)とすると、衛星受信機間距離di(tk´)は、次の数4で算出される。
【数3】
【数4】
【0023】
続いて、ステップS34で算出した各衛星iの衛星受信機間距離di(tk´)の1ms以下の桁に対応する部分δdi(tk´)を、次式によって算出する(ステップS35)。
【数5】
【0024】
そして、ステップS35で算出した1ms以下の桁に対応する部分δdi(tk´)と、各衛星iから実際に受信した擬似距離(航法データ)の1ms以下の部分(コードチップ)との差から擬似距離残差δρiを算出する。すなわち、次式に基づいて、各衛星iの擬似距離残差δρiを算出する(ステップS36)。
【数6】
ここで、「CodeChip(m)」は、衛星から受信した擬似距離の1ms以下の部分の補正値を示し、「di(tk´)の1ms以下の桁」は、ステップS35で算出したδdi(tk´)を示す。
【0025】
一方、擬似距離残差δρiは、線形化した次の観測方程式で得られる。
【数7】
δXT=(δx、δy、δz):GPS受信機の前回の位置からのずれ
δb:GPS受信機の時刻オフセット
ε:擬似距離誤差
ここで、「G」は観測行列(幾何行列)を表す。
【数8】
n:衛星数
l(i):受信機からi番衛星への視線方向の単位ベクトル
【0026】
そして、この式の最小二乗法による解は、次のようになる。
【数9】
また、上記のように、前回の測位位置をX0=(x0、y0、z0)とすると、GPS受信機の測位位置X=(x、y、z)は、次のように表される。
x=x0+δx
y=y0+δy
z=z0+δz
【0027】
GPS受信機の測位位置Xと各衛星iとの距離dik´を、上記の数4と同様に、次式によって算出する。
【数10】
さらに、上記の数6と同様に、衛星受信機間距離dik´の1ms以下の桁に対応する部分と、各衛星iから実際に受信した擬似距離の1ms以下の部分(コードチップ)との差、つまり擬似距離残差ΔRikを次式によって算出する。このように、数6で算出した擬似距離残差δρiを用いて、再度、擬似距離残差ΔRikを算出するものである(ステップS37)。
【数11】
なお、次の数12は、各衛星iの擬似距離残差ΔRikの平均値を示す。
【数12】
【0028】
次に、各衛星iの擬似距離残差ΔRikの標準偏差σkを、次の式によって算出する(ステップS38)。
【数13】
ここで、nは、衛星数を示す。
【0029】
以上のような擬似距離残差処理をすべての候補時刻t0―kに対して行い、標準偏差σkが最も小さい候補時刻t0―kを第1の推定時刻とする(ステップS23)。このように、標準偏差σkが最も小さい候補時刻t0―kを第1の推定時刻に選定するのは、次の理由による。すなわち、雑音がないと仮定すると、擬似距離残差の平均値であるところの数12が、ユーザ時刻(GPS受信機の時刻)とGPSシステム時刻(各衛星の時刻)とのオフセットに相当し、候補時刻t0―kが正しい時刻であれば、各衛星iの擬似距離残差ΔRikが等しくなる。そして、候補時刻t0―kが正しい時刻に近いほど、各衛星iの擬似距離残差ΔRikのバラツキ(偏差)が小さくなるからである。
【0030】
次に、第1の推定時刻から所定の範囲内にある時刻を候補時刻として設定する(ステップS24)。すなわち、この実施の形態では、第1の推定時刻t1を中心として±500msの範囲内で、100ms間隔で候補時刻t1―k(k=−500ミリ、−400ミリ…+400ミリ、+500ミリ)を設定する。次に、各候補時刻t1―kに対して、上記の擬似距離残差処理を行い(ステップS25)、標準偏差σkが最も小さい候補時刻t1―kを第2の推定時刻とする(ステップS26)。
【0031】
続いて、第2の推定時刻から所定の範囲内にある時刻を候補時刻として設定する(ステップS27)。すなわち、この実施の形態では、第2の推定時刻t2を中心として±50msの範囲内で、10ms間隔で候補時刻t2―k(k=−50ミリ、−40ミリ…+40ミリ、+50ミリ)を設定する。次に、各候補時刻t2―kに対して、上記の擬似距離残差処理を行い(ステップS28)、標準偏差σkが最も小さい候補時刻t2―kを最終推定時刻とする(ステップS29)。
【0032】
このようにして、目標精度である±10msまで最終推定時刻を絞り込む。そして、この最終推定時刻がGPS受信機の正しい時刻と推定、決定され、上記のように、この最終推定時刻に基づいてGPS受信機の測位が算出される(ステップS3)ものである。以上のような時刻決定方法および測位方法に基づくアルゴリズム(プログラム)が、GPS受信器に備えられている。なお、このようなアルゴリズムでは、3次元測位する場合、衛星数が4個では、候補時刻がGPS受信機の正しい時刻から大きくずれていても、ΔRikのバラツキがゼロとなる測位解が得られてしまい、ΔRikの標準偏差σkの最小値を求めることができない。このため、3次元測位する場合には、5個以上の衛星が必要であり、同様に、2次元測位する場合には、4個以上の衛星が必要である。
【0033】
このような時刻決定方法を利用したホットスタート時の測位方法では、まず、各衛星iから擬似距離の1ms以下の部分を受信すると(ステップS1)、上記の時刻決定方法に従って、GPS受信機の正しい時刻が推定、決定される(ステップS2)。すなわち、上記のように、候補時刻を基準にして算出した各衛星iの衛星受信機間距離di(tk´)の1ms以下の桁に対応する部分δdi(tk´)と、各衛星iから受信した擬似距離の1ms以下の部分とから擬似距離残差ΔRikを算出する。そして、この擬似距離残差の平均値であるところの数12が、ユーザ時刻(GPS受信機の時刻)とGPSシステム時刻(各衛星の時刻)とのオフセットに相当するため、候補時刻がGPS受信機の時刻として正しいとすると、各衛星iの擬似距離残差ΔRikが等しくなる(近似する)。このため、各衛星iの擬似距離残差ΔRikの標準偏差σkが最小な候補時刻を、選定範囲および選定レベルを狭めながら、±10msのレベルまで割り出して、GPS受信機の正しい時刻と推定、決定するものである。
【0034】
次に、推定、決定したGPS受信機の時刻における擬似距離残差ΔRikを用いて、最小二乗法によりGPS受信機の位置を算出する(ステップS3)ものである。
【0035】
以上のようなホットスタート時におけるGPS受信機の時刻決定方法および測位方法によれば、各衛星iから擬似距離(航法データ)の1ms以下の部分を受信した時点で、候補時刻t0―kに対する各衛星受信機間距離di(tk´)を算出し、この衛星受信機間距離di(tk´)の1ミリ秒以下の桁に対応する部分δdi(tk´)と、衛星から実際に受信した擬似距離の1ミリ秒以下の部分(コードチップ)とから擬似距離残差δρi(ΔRik)を算出する。このため、各衛星iから受信する航法データのすべてを解読・解析する必要がなく、1ミリ秒以下の部分、つまりコードチップ以下のみを受信した時点で擬似距離残差δρiを算出することができる。また、選定範囲および選定レベルを狭めながら、擬似距離残差δρiの算出を複数の候補時刻t0―k(t1―k、t2―k)に対して行い、各衛星iの擬似距離残差δρiの標準偏差σkが最も小さい候補時刻t0―k(t1―k、t2―k)をGPS受信機の正しい時刻とするため、高い精度・所望の精度で正しい時刻を得ることが可能となる。
【0036】
すなわち、従来の測位方法では、各衛星iから受信した航法データのすべてを解読・解析して擬似距離を生成し、この擬似距離と算出した衛星受信機距離とから擬似距離残差を算出する。つまり、各衛星iから受信した擬似距離と算出した衛星受信機距離との絶対値(全体値)を比較して擬似距離残差を算出する。そして、絶対値である擬似距離残差に基づいて、GPS受信機の測位を算出する。これに対して、この実施の形態では、GPS受信機の正しい時刻においては、擬似距離残差は小さく、かつ、各衛星の擬似距離残差は等しくなることから、各衛星iから航法データの1ms以下の部分のみを受信した時点で、絶対値ではなく、1ms以下における擬似距離残差ΔRik(δρi)を算出する。そして、この擬似距離残差ΔRikの標準偏差σkが最小となる候補時刻t0―k(t1―k、t2―k)が正しい時刻であるとして、GPS受信機の正しい時刻を推定、決定し、GPS受信機の測位を算出する。
【0037】
これらの結果、GPS受信機の正しい時刻を短時間で算出、推定することが可能となり、推定された正しい時刻を用いることで、ホットスタート時におけるGPS受信機の測位を短時間に行うこと、つまりTTFFを短くすることが可能となる。
【0038】
以上、この発明の実施の形態について説明したが、具体的な構成は、上記の実施の形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計の変更等があっても、この発明に含まれる。例えば、上記の実施の形態では、RTCの時刻t0などを中心に所定の範囲内で、所定の時間間隔で候補時刻t0―kを設定しているが、例えば、2つの候補時刻で擬似距離残差の標準偏差を比較し、その結果に基づいて次の候補時刻を設定し、同様にして擬似距離残差の標準偏差を比較する、というようにして候補時刻を絞り込むようにしてもよい。
【技術分野】
【0001】
この発明は、GPS(Global Positioning System)による測位のホットスタート時において、GPS受信機の正しい・真の時刻を推定、決定するGPS受信機の時刻決定方法に関する。
【背景技術】
【0002】
例えば、GPSによるカーナビゲーションにおいて、一時的に自動車を駐車などしてカーナビゲーションを停止し、再度カーナビゲーションを開始する場合、GPS受信機において測位を開始する。このような状況での測位開始をホットスタートといい、GPS受信機には、前回の測位位置、RTC(Real−Time Clock)の時刻、エフェメリスデータなどが保有され、従来、次のようにして測位を算出していた。ここで、RTCの時刻とは、前回の測位の時刻からGPS受信機側で独自に進んだ時刻であり、真の時刻に対しておおよその時刻を示し、また、航法データを復調することで、正確な信号送信時刻が得られる。
【0003】
まず、図4に示すように、衛星の送信時刻(101)とエフェメリスデータ(102)とに基づいて衛星の位置(103)を算出し、算出した衛星位置(103)と前回測位したときのGPS受信機の位置(104)とに基づいて、衛星とGPS受信機との距離(105)を算出する。一方、衛星から受信した航法データに基づいて、衛星とGPS受信機との擬似距離を生成する(106、107)。
【0004】
すなわち、擬似距離ρ(t)は、次式で表される。
ρ(t)=c[tu−ts]
ここで、tuはGPS受信器の受信時刻、tsは衛星の送信時刻、cは光速であり、さらに、tsは、図5に示すように、Zカウント、航法データのビット数、コード数、コードチップ数およびコードチップの位相を加算したものとなる。そして、擬似距離を生成するには、まず、コリレータによってコードチップとコード位相とを検出し、次に、エッジ検出によってコード数を検出し、さらに、航法データを復調してビット数とZカウントとを取得して、衛星の送信時刻tsを生成し、この送信時刻tsと受信器の受信時刻tuとの差から擬似距離を算出する。次に、算出した衛星受信機距離(105)と生成した擬似距離(107)との差である擬似距離残差を算出・生成する(108)。そして、この擬似距離残差を用いて、最小二乗法によりGPS受信機の位置を算出する(109)ものである。
【0005】
また、受信不可能なGPS信号をサーチしないことにより、初回の測位開始から測位までに要する時間、つまりTTFF(Time To First Fix)を短くすることが可能、という技術が知られている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−303663号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、従来のホットスタート時における測位方法では、航法データのすべてを解読・解析して擬似距離を生成しなければならない。すなわち、上記のように、コードチップとコード位相の検出を行った後に、エッジの検出や航法データの復調などを行わなければならない。さらに、生成した擬似距離と算出した衛星受信機距離との差から擬似距離残差を生成しなければならないため、解読や生成に時間を要する。このため、TTFFが長くなるという問題があった。一方、GPS受信機の正しい・真の時刻が短時間にわかれば、ホットスタート時におけるGPS受信機の測位を短時間に算出すること、つまりTTFFを短くすることが可能となる。
【0008】
そこでこの発明は、ホットスタート時におけるTTFFを短くすることが可能なGPS受信機の時刻決定方法を提供することを目的としている。
【課題を解決するための手段】
【0009】
上記目的を達成するために請求項1に記載の発明は、GPS受信機に、GPS受信機の前回の測位位置、リアルタイムクロックの時刻およびエフェメリスデータが保有されている時に、GPS受信機の正しい時刻を決定するGPS受信機の時刻決定方法であって、
リアルタイムクロックの時刻から所定の範囲にある時刻を候補時刻とし、この候補時刻における衛星の位置をエフェメリスデータに基づいて算出し、
算出した衛星の位置に基づいて、前回の測位位置と衛星との距離を算出し、
算出した距離に基づいて、前記候補時刻に対する衛星からの送信時刻を算出し、
算出した送信時刻における衛星の位置を算出して、算出した衛星の位置と前回の測位位置とに基づいて衛星受信機間距離を算出し、
算出した衛星受信機間距離の1ミリ秒以下の桁に対応する部分と、衛星から実際に受信した擬似距離(航法データ)の1ミリ秒以下の部分(コードチップ)との差を擬似距離残差とし、各衛星の擬似距離残差を算出して最小二乗法によりGPS受信機の位置を算出し、その測位位置での擬似距離残差を求め、その標準偏差が小さい候補時刻を割り出してGPS受信機の正しい時刻とする、ことを特徴とする。
【0010】
この発明によれば、候補時刻に対する各衛星受信機間距離を算出し、算出した各衛星受信機間距離と各衛星から受信した擬似距離との1ミリ秒以下の部分から、各衛星の擬似距離残差を算出する。このような算出を複数の候補時刻に対して行い、各衛星の擬似距離残差の偏差(バラツキ)が小さい候補時刻をGPS受信機の正しい時刻とする。
【発明の効果】
【0011】
請求項1に記載の発明によれば、候補時刻に対する各衛星受信機間距離を算出し、衛星受信機間距離の1ミリ秒以下の桁に対応する部分と、衛星から実際に受信した擬似距離の1ミリ秒以下の部分とから擬似距離残差を算出する。このため、衛星から受信する擬似距離(航法データ)のすべてを解読・解析する必要がなく、1ミリ秒以下の部分、つまりコードチップのみを受信した時点で擬似距離残差を算出することができる。また、擬似距離残差の算出を複数の候補時刻に対して行い、各衛星の擬似距離残差の偏差が小さい候補時刻をGPS受信機の正しい時刻とするため、高い精度・所望の精度で正しい時刻を得ることが可能となる。これらの結果、GPS受信機の正しい時刻を短時間で算出することが可能となり、得られた正しい時刻を用いることで、ホットスタート時におけるGPS受信機の測位を短時間に行うこと、つまりTTFFを短くすることが可能となる。
【図面の簡単な説明】
【0012】
【図1】この発明の実施の形態に係るGPS受信機の時刻決定方法を利用したホットスタート時における受信機の測位方法を示す概略フローチャートである。
【図2】図1の測位方法とGPS受信機で保有するデータなどとの関係を示す概略構成ブロック図である。
【図3】この発明の実施の形態に係るGPS受信機の時刻決定方法を示すフローチャートである。
【図4】従来のホットスタート時における測位方法を示す概略構成ブロック図である。
【図5】衛星から受信する擬似距離のデータ構成とGPS受信機のクロックとの関係を示す図である。
【発明を実施するための形態】
【0013】
以下、この発明を図示の実施の形態に基づいて説明する。
【0014】
まず、この発明の実施の形態に係るGPS受信機の時刻決定方法を利用した、ホットスタート時におけるGPS受信機の測位方法について、その概略を説明する。この測位方法では、GPS受信機に、GPS受信機(ユーザ)の前回の測位位置、リアルタイムクロック(RTC)の時刻およびエフェメリスデータが保有、記憶されていることを前提とし、まず、図1に示すように、衛星から擬似距離の1ms(ミリ秒)以下の部分を受信する(ステップS1)。つまり、衛星から航法データのコードチップ以下の部分を受信する。
【0015】
次に、後述する時刻決定方法に従って、GPS受信機の正しい時刻を推定、決定し(ステップS2)、さらに、この時刻に基づいてGPS受信機の測位を算出する(ステップS3)ものである。
【0016】
ここで、ホットスタート時における測位方法の概略について、GPS受信機で保有するデータなどとの関係に基づいて説明する。まず、図2に示すように、RTCの時刻D1に基づいてGPS受信機の時刻を仮定し(ステップS11)、仮定した受信機時刻とエフェメリスデータD2とに基づいて衛星の位置を算出する(ステップS12)。次に、算出した衛星位置と前回測位したときのGPS受信機の位置D3とに基づいて、衛星とGPS受信機との距離を算出し、さらに、算出した衛星受信機間距離の1ms以下の桁に対応する部分を算出・抽出する(ステップS13)。
【0017】
一方、衛星から実際に受信した擬似距離の1ms以下の部分を生成する(ステップS14、15)。すなわち、コリレータによって航法データのコードチップとコード位相とを検出する。次に、ステップS13で算出した衛星受信機間距離の1ms以下の部分と、ステップS15で算出した擬似距離の1ms以下の部分との差である擬似距離残差を生成する(ステップS16)。そして、この擬似距離残差に基づいてGPS受信機の測位を算出する(ステップS17)ものである。
【0018】
次に、GPS受信機の時刻決定方法について、具体的に説明する。ここで、前提条件として、GPS受信機の正しい時刻は、RTCの時刻から所定の範囲内、具体的には、RTCの時刻の±5秒の範囲内に存在するものとし、目標精度を±10msとする。また、目標の測位精度を30m、想定するHDOPを1.5とし、目標の擬似距離精度を20mとする。一方、最大ドップラー周波数を5kHzとし、最大擬似距離変化率を950m/sとする。そして、目標の擬似距離精度が20mとなる時間は、20/950=21msであり、マージンを考慮して10msとする。
【0019】
まず、図3に示すように、RTCの時刻から所定の範囲内にある時刻を候補時刻として設定する(ステップS21)。すなわち、RTCで読み取った時刻の小数部を丸めて(四捨五入等して)整数秒t0とし、このRTCの時刻t0を中心として±5秒の範囲内で、1秒間隔で候補時刻t0―k(k=−5、−4…+4、+5)を設定する。次に、各候補時刻t0―kに対して、擬似距離残差処理を行う(ステップS22)。
【0020】
具体的には、候補時刻t0―kにおける各衛星iの位置riを、エフェメリスデータに基づいて算出する(ステップS31)。なお、この算出は、既知の算出式によって行う。
【数1】
【0021】
次に、ステップS31で算出した衛星の位置riに基づいて、GPS受信機の前回の測位位置と各衛星iとの距離di(t0―k)を算出する(ステップS32)。続いて、ステップS32で算出した距離di(t0―k)に基づいて、候補時刻t0―kに対する各衛星iからの送信時刻tk´を、次式に基づいて算出する(ステップS33)。
【数2】
ここで、cは、光速を示す。
【0022】
次に、送信時刻tk´における各衛星iの位置ri(tk´)を算出し、さらに、算出した衛星の位置ri(tk´)とGPS受信機の前回の測位位置とに基づいて、各衛星iの衛星受信機間距離di(tk´)を算出する(ステップS34)。すなわち、衛星iの位置ri(tk´)は次の数3で表され、GPS受信機の前回の測位位置X0を(x0、y0、z0)とすると、衛星受信機間距離di(tk´)は、次の数4で算出される。
【数3】
【数4】
【0023】
続いて、ステップS34で算出した各衛星iの衛星受信機間距離di(tk´)の1ms以下の桁に対応する部分δdi(tk´)を、次式によって算出する(ステップS35)。
【数5】
【0024】
そして、ステップS35で算出した1ms以下の桁に対応する部分δdi(tk´)と、各衛星iから実際に受信した擬似距離(航法データ)の1ms以下の部分(コードチップ)との差から擬似距離残差δρiを算出する。すなわち、次式に基づいて、各衛星iの擬似距離残差δρiを算出する(ステップS36)。
【数6】
ここで、「CodeChip(m)」は、衛星から受信した擬似距離の1ms以下の部分の補正値を示し、「di(tk´)の1ms以下の桁」は、ステップS35で算出したδdi(tk´)を示す。
【0025】
一方、擬似距離残差δρiは、線形化した次の観測方程式で得られる。
【数7】
δXT=(δx、δy、δz):GPS受信機の前回の位置からのずれ
δb:GPS受信機の時刻オフセット
ε:擬似距離誤差
ここで、「G」は観測行列(幾何行列)を表す。
【数8】
n:衛星数
l(i):受信機からi番衛星への視線方向の単位ベクトル
【0026】
そして、この式の最小二乗法による解は、次のようになる。
【数9】
また、上記のように、前回の測位位置をX0=(x0、y0、z0)とすると、GPS受信機の測位位置X=(x、y、z)は、次のように表される。
x=x0+δx
y=y0+δy
z=z0+δz
【0027】
GPS受信機の測位位置Xと各衛星iとの距離dik´を、上記の数4と同様に、次式によって算出する。
【数10】
さらに、上記の数6と同様に、衛星受信機間距離dik´の1ms以下の桁に対応する部分と、各衛星iから実際に受信した擬似距離の1ms以下の部分(コードチップ)との差、つまり擬似距離残差ΔRikを次式によって算出する。このように、数6で算出した擬似距離残差δρiを用いて、再度、擬似距離残差ΔRikを算出するものである(ステップS37)。
【数11】
なお、次の数12は、各衛星iの擬似距離残差ΔRikの平均値を示す。
【数12】
【0028】
次に、各衛星iの擬似距離残差ΔRikの標準偏差σkを、次の式によって算出する(ステップS38)。
【数13】
ここで、nは、衛星数を示す。
【0029】
以上のような擬似距離残差処理をすべての候補時刻t0―kに対して行い、標準偏差σkが最も小さい候補時刻t0―kを第1の推定時刻とする(ステップS23)。このように、標準偏差σkが最も小さい候補時刻t0―kを第1の推定時刻に選定するのは、次の理由による。すなわち、雑音がないと仮定すると、擬似距離残差の平均値であるところの数12が、ユーザ時刻(GPS受信機の時刻)とGPSシステム時刻(各衛星の時刻)とのオフセットに相当し、候補時刻t0―kが正しい時刻であれば、各衛星iの擬似距離残差ΔRikが等しくなる。そして、候補時刻t0―kが正しい時刻に近いほど、各衛星iの擬似距離残差ΔRikのバラツキ(偏差)が小さくなるからである。
【0030】
次に、第1の推定時刻から所定の範囲内にある時刻を候補時刻として設定する(ステップS24)。すなわち、この実施の形態では、第1の推定時刻t1を中心として±500msの範囲内で、100ms間隔で候補時刻t1―k(k=−500ミリ、−400ミリ…+400ミリ、+500ミリ)を設定する。次に、各候補時刻t1―kに対して、上記の擬似距離残差処理を行い(ステップS25)、標準偏差σkが最も小さい候補時刻t1―kを第2の推定時刻とする(ステップS26)。
【0031】
続いて、第2の推定時刻から所定の範囲内にある時刻を候補時刻として設定する(ステップS27)。すなわち、この実施の形態では、第2の推定時刻t2を中心として±50msの範囲内で、10ms間隔で候補時刻t2―k(k=−50ミリ、−40ミリ…+40ミリ、+50ミリ)を設定する。次に、各候補時刻t2―kに対して、上記の擬似距離残差処理を行い(ステップS28)、標準偏差σkが最も小さい候補時刻t2―kを最終推定時刻とする(ステップS29)。
【0032】
このようにして、目標精度である±10msまで最終推定時刻を絞り込む。そして、この最終推定時刻がGPS受信機の正しい時刻と推定、決定され、上記のように、この最終推定時刻に基づいてGPS受信機の測位が算出される(ステップS3)ものである。以上のような時刻決定方法および測位方法に基づくアルゴリズム(プログラム)が、GPS受信器に備えられている。なお、このようなアルゴリズムでは、3次元測位する場合、衛星数が4個では、候補時刻がGPS受信機の正しい時刻から大きくずれていても、ΔRikのバラツキがゼロとなる測位解が得られてしまい、ΔRikの標準偏差σkの最小値を求めることができない。このため、3次元測位する場合には、5個以上の衛星が必要であり、同様に、2次元測位する場合には、4個以上の衛星が必要である。
【0033】
このような時刻決定方法を利用したホットスタート時の測位方法では、まず、各衛星iから擬似距離の1ms以下の部分を受信すると(ステップS1)、上記の時刻決定方法に従って、GPS受信機の正しい時刻が推定、決定される(ステップS2)。すなわち、上記のように、候補時刻を基準にして算出した各衛星iの衛星受信機間距離di(tk´)の1ms以下の桁に対応する部分δdi(tk´)と、各衛星iから受信した擬似距離の1ms以下の部分とから擬似距離残差ΔRikを算出する。そして、この擬似距離残差の平均値であるところの数12が、ユーザ時刻(GPS受信機の時刻)とGPSシステム時刻(各衛星の時刻)とのオフセットに相当するため、候補時刻がGPS受信機の時刻として正しいとすると、各衛星iの擬似距離残差ΔRikが等しくなる(近似する)。このため、各衛星iの擬似距離残差ΔRikの標準偏差σkが最小な候補時刻を、選定範囲および選定レベルを狭めながら、±10msのレベルまで割り出して、GPS受信機の正しい時刻と推定、決定するものである。
【0034】
次に、推定、決定したGPS受信機の時刻における擬似距離残差ΔRikを用いて、最小二乗法によりGPS受信機の位置を算出する(ステップS3)ものである。
【0035】
以上のようなホットスタート時におけるGPS受信機の時刻決定方法および測位方法によれば、各衛星iから擬似距離(航法データ)の1ms以下の部分を受信した時点で、候補時刻t0―kに対する各衛星受信機間距離di(tk´)を算出し、この衛星受信機間距離di(tk´)の1ミリ秒以下の桁に対応する部分δdi(tk´)と、衛星から実際に受信した擬似距離の1ミリ秒以下の部分(コードチップ)とから擬似距離残差δρi(ΔRik)を算出する。このため、各衛星iから受信する航法データのすべてを解読・解析する必要がなく、1ミリ秒以下の部分、つまりコードチップ以下のみを受信した時点で擬似距離残差δρiを算出することができる。また、選定範囲および選定レベルを狭めながら、擬似距離残差δρiの算出を複数の候補時刻t0―k(t1―k、t2―k)に対して行い、各衛星iの擬似距離残差δρiの標準偏差σkが最も小さい候補時刻t0―k(t1―k、t2―k)をGPS受信機の正しい時刻とするため、高い精度・所望の精度で正しい時刻を得ることが可能となる。
【0036】
すなわち、従来の測位方法では、各衛星iから受信した航法データのすべてを解読・解析して擬似距離を生成し、この擬似距離と算出した衛星受信機距離とから擬似距離残差を算出する。つまり、各衛星iから受信した擬似距離と算出した衛星受信機距離との絶対値(全体値)を比較して擬似距離残差を算出する。そして、絶対値である擬似距離残差に基づいて、GPS受信機の測位を算出する。これに対して、この実施の形態では、GPS受信機の正しい時刻においては、擬似距離残差は小さく、かつ、各衛星の擬似距離残差は等しくなることから、各衛星iから航法データの1ms以下の部分のみを受信した時点で、絶対値ではなく、1ms以下における擬似距離残差ΔRik(δρi)を算出する。そして、この擬似距離残差ΔRikの標準偏差σkが最小となる候補時刻t0―k(t1―k、t2―k)が正しい時刻であるとして、GPS受信機の正しい時刻を推定、決定し、GPS受信機の測位を算出する。
【0037】
これらの結果、GPS受信機の正しい時刻を短時間で算出、推定することが可能となり、推定された正しい時刻を用いることで、ホットスタート時におけるGPS受信機の測位を短時間に行うこと、つまりTTFFを短くすることが可能となる。
【0038】
以上、この発明の実施の形態について説明したが、具体的な構成は、上記の実施の形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計の変更等があっても、この発明に含まれる。例えば、上記の実施の形態では、RTCの時刻t0などを中心に所定の範囲内で、所定の時間間隔で候補時刻t0―kを設定しているが、例えば、2つの候補時刻で擬似距離残差の標準偏差を比較し、その結果に基づいて次の候補時刻を設定し、同様にして擬似距離残差の標準偏差を比較する、というようにして候補時刻を絞り込むようにしてもよい。
【特許請求の範囲】
【請求項1】
GPS受信機に、GPS受信機の前回の測位位置、リアルタイムクロックの時刻およびエフェメリスデータが保有されている時に、GPS受信機の正しい時刻を決定するGPS受信機の時刻決定方法であって、
リアルタイムクロックの時刻から所定の範囲にある時刻を候補時刻とし、この候補時刻における衛星の位置をエフェメリスデータに基づいて算出し、
算出した衛星の位置に基づいて、前回の測位位置と衛星との距離を算出し、
算出した距離に基づいて、前記候補時刻に対する衛星からの送信時刻を算出し、
算出した送信時刻における衛星の位置を算出して、算出した衛星の位置と前回の測位位置とに基づいて衛星受信機間距離を算出し、
算出した衛星受信機間距離の1ミリ秒以下の桁に対応する部分と、衛星から実際に受信した擬似距離の1ミリ秒以下の部分との差を擬似距離残差とし、各衛星の擬似距離残差を算出して測位させ、その測位位置での擬似距離残差を求め、その標準偏差が最小となる候補時刻を割り出してGPS受信機の正しい時刻とする、
ことを特徴とするGPS受信機の時刻決定方法。
【請求項1】
GPS受信機に、GPS受信機の前回の測位位置、リアルタイムクロックの時刻およびエフェメリスデータが保有されている時に、GPS受信機の正しい時刻を決定するGPS受信機の時刻決定方法であって、
リアルタイムクロックの時刻から所定の範囲にある時刻を候補時刻とし、この候補時刻における衛星の位置をエフェメリスデータに基づいて算出し、
算出した衛星の位置に基づいて、前回の測位位置と衛星との距離を算出し、
算出した距離に基づいて、前記候補時刻に対する衛星からの送信時刻を算出し、
算出した送信時刻における衛星の位置を算出して、算出した衛星の位置と前回の測位位置とに基づいて衛星受信機間距離を算出し、
算出した衛星受信機間距離の1ミリ秒以下の桁に対応する部分と、衛星から実際に受信した擬似距離の1ミリ秒以下の部分との差を擬似距離残差とし、各衛星の擬似距離残差を算出して測位させ、その測位位置での擬似距離残差を求め、その標準偏差が最小となる候補時刻を割り出してGPS受信機の正しい時刻とする、
ことを特徴とするGPS受信機の時刻決定方法。
【図1】

【図2】

【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−153890(P2011−153890A)
【公開日】平成23年8月11日(2011.8.11)
【国際特許分類】
【出願番号】特願2010−15162(P2010−15162)
【出願日】平成22年1月27日(2010.1.27)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成23年8月11日(2011.8.11)
【国際特許分類】
【出願日】平成22年1月27日(2010.1.27)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]