
GPS受信機の時間の決定
【課題】非同期ネットワークの一部であるGPSハンドセットで、測定時刻を決定する。
【解決手段】方法は、所定の期間だけGPSメッセージからGPSデータを捕捉するステップと、予測されるデータパターンを捕捉データに配置するステップと、データ捕捉の開始時間と予測されるデータパターンの到着時刻との時間オフセットを決定するステップとを含む。
【解決手段】方法は、所定の期間だけGPSメッセージからGPSデータを捕捉するステップと、予測されるデータパターンを捕捉データに配置するステップと、データ捕捉の開始時間と予測されるデータパターンの到着時刻との時間オフセットを決定するステップとを含む。
【発明の詳細な説明】
【技術分野】
【0001】
(関連出願の相互参照)
本出願は、1999年2月19日に出願された係属中の米国実用特許出願第09/253,318号、1999年2月19日に出願された係属中の米国実用特許出願第09/253,662号、および1999年2月19日に出願された係属中の米国実用特許出願第09/253,679号に基づく優先権を主張する。
【0002】
(発明の分野)
本発明は、概してGPS受信機に関し、特にGPSハンドセットに関する。
【背景技術】
【0003】
(発明の背景)
全地球測位システム(GPS)は、世界中のどこにGPS受信機があるときにもGPS受信機に正確な位置情報を与えるため米国国防省が開発した衛星に基づくシステムである。したがって、適切に装備されたGPS受信機は、位置が望まれるあらゆる状況で使用することができ、通常は3次元の位置座標を生成する。GPSシステムは、12時間の軌道で地球を周回する24個以上の衛星で構成された衛星軌道配置(コンステレーション)によって可能になる。衛星は6つの軌道面に配置され、各軌道面が4つの衛星を含む。軌道面は60°隔置され、赤道面から約55°傾斜する。この配置により、空の見通しがきく地球上の任意の点で、いつでも4個〜12個の衛星が見えることが確実にされる。
【0004】
GPS衛星は、GPS受信機が使用すべきデータを伝送する。データには、衛星位置データ(人工衛星軌道暦データ)および衛星クロック補正データが含まれる。GPS信号は、1.023Mhzチップレート(0.001秒反復インターバル)において1023ビット長のGoldスプレッディングコードで2相変調した搬送信号を含む。これは、50ビット/秒(BPS)のレートのデータビット(1データビット当たり20ミリ秒のレートでの伝送)でも変調する。50BPSデータは、GPSに基づく時刻(すなわち、GPS衛星のクロック時刻)を決定するための情報および地理的位置を決定するための情報を含む。
【0005】
GPS信号に含まれるデータの詳細情報は、Interface Control Document ICD−GPS−200で入手可能であり、これは1991年に改訂され、Rockwell International Corporationから発行され、引用により本明細書に組み込まれる。GPSメッセージに含まれるクロック時刻は、衛星で精密に同期された絶対時刻信号である。すなわち、GPS配置にあるすべての衛星は、衛星から地上局への信号伝搬時間を考慮に入れた地上基準局によって同期される。この方法で、配置にあるどの衛星も、衛星で時間を同期され、絶対時刻エラーは、数ナノ秒〜数十ナノ秒以内で精密に制御される。
【0006】
絶対時刻信号は、位置を正確に決定するために、GPS受信機によって使用することができる。位置がほぼ判明したら、受信機内の絶対時刻も、衛星同報通信メッセージで受信機が観察した精密な時間を、受信機と衛星間の計算可能な伝搬遅延でオフセットすることにより知ることができる。
【0007】
受信機で絶対時刻を知ることは、GPS衛星が約4m/ミリ秒で移動しているので、重要なパラメータである。レンジ測定時刻に1ミリ秒の誤差がある場合、測定されたレンジには4メートルもの誤差があることもある。このレンジエラーは、次に幾何学的位置係数(GDOP、すなわち精密度の幾何学的希釈)を掛けて追加の位置エラーに翻訳され、これは4メートルの追加レンジエラーの何倍にもなることがある。
【0008】
50BPSデータに含まれる週の時刻(TOW)データフィールドは、絶対時刻信号と組み合わせられて、GPS受信機がローカル時間を正確かつ確実に決定するのを可能にする。TOWデータは、6秒間隔で全衛星から伝送される。TOWデータの検出は、信号の絶対値によって決定される。特定の信号絶対値レベルを下回ると、レンジ測定値を獲得することは可能であるが、TOWデータを復号することが不可能である。例えば、約30dB−Hz未満の信号レベルの場合は、50BPSメッセージの個々のメッセージビットを復号することが不可能になる。しかし、30dB−Hzよりはるかに下、20dB−Hz未満のレベルの信号でも信号補正を獲得することが可能である。Motorolaの出願第09/253,318号、第09/253,662号および第09/253,679号で採用した技術を使用して、補正検出精度をこれらのレベルまで拡張することができる。したがって、必要なのは、30dB−Hz未満の信号レベルで時刻を決定する方法である。
【0009】
GPS受信機は、常にGPS衛星同報通信データからローカル時間を確実に決定できるわけではない。GPSの機能は非常に有用であり、その結果、例えば、携帯電話および他のハンドヘルド電子装置などの、様々な装置に組み込まれている。このような携帯性のため、それらの装置は往々にしてビルの谷間を走行する車両に置かれたり、建物または他の障害物の中に持ち込まれたりする。当然の結果として、GPS信号は遮断されるか、受信状態が悪くなり得る。このため、50BPS絶対時刻信号の受信が不確実になることがある。このような場合は、位置測定が可能になるようにGPSハンドセットが正確な時間測定値を獲得することが望ましい。GPS衛星は約4m/ミリ秒の速度で移動するので、レンジ測定の時刻が正確に分からなければ、レンジ測定が、したがって位置測定が、それに比例する誤差を有することになる。例えば、測定時刻が20ミリ秒の誤差を含む場合、レンジ測定には80メートルもの誤差があり、その結果、幾何学的形状に応じて、位置測定に数百メートルの誤差が生じる恐れがある。
【0010】
CDMA(符号分割多元接続)携帯電話などの、一部の携帯電話装置では、インフラストラクチャが同期され、各基地局がネットワークのGPS受信機から精密な時刻を受信する。次に、CDMA基地局は、時刻をモバイル機器に伝送することによってモバイル機器を同期し、CDMA電話ハンドセットの時刻を1マイクロ秒(+伝送遅延)のオーダーの精度で分かるようにする。
【0011】
例えば、氾欧州デジタルセルラーシステム(GSM(登録商標))携帯電話などの非同期GPS装置では、精密な時刻情報が望ましいが、概ねネットワークから発する信号から入手することができない。しかし、適切なハードウェアおよび/またはソフトウェアを追加することにより、これらを同期するために既存のネットワークを改造することは非実用的であり、費用がかかる。
【0012】
関連技術は、様々な方法で上記の問題を解決しようとした。第1の手法は、Krasnerの米国特許第5,812,087号で与えられている。Krasnerは、ハンドセットのディジタルスナップショットメモリを使用して、データをランダム列で捕捉し、それを基地局に伝送する。基地局は、従来通りのGPS受信機を使用して、ディジタルスナップショットメモリで捕捉した50BPSデータビットの一部の到着時刻を測定する。基地局で測定したデータビットは、既知の到着時刻を有し、ディジタルスナップショットメモリで捕捉した未知のデータビットとの相関がとられる。最大の相関が得られると、移動メモリのデータ捕捉時刻を決定することができる。
【0013】
しかし、Krasnerの欠点は、遠隔の基地局のGPS受信機が必要とされることである。遠隔の基地局のGPS受信機が、1つまたは複数のGPS衛星からの現在のGPSデータシーケンスを測定し、これを移動ユニットに伝送しなければならない。あるいは、移動ユニットが検出後の補正データを基地に伝送してもよい。いずれの方法でも、手法では基地局と移動ユニット間で多数のビットを伝送する必要があり(例えば、12個の衛星がそれぞれ50ビット)、ハンドセットが、基地局で観察し、通信したパターンとの相関を後にとるため、受信データのサンプルを記憶する必要がある。
【0014】
第2の関連技術の手法では、位置測定ユニット(LMU)を非同期ネットワーク全体に配置する。LMUの目的は、非同期通信ネットワークが記憶する時刻とGPSの時間との時間オフセットを測定することである。個々のLMUが各基地局からのメッセージビットの到着時刻を測定し、各基地局の相対的時間オフセットを決定する。これは、(伝搬時間を決定するための)各基地局の位置およびLMUの位置に関する知識を使用し、LMU内部のGPS受信機によって遂行される。
【0015】
しかし、この第2の関連技術の手法は、通信ネットワークに追加の構成要素を必要とするので費用がかかる。複雑な解決策でもある。第3の関連技術の手法では、50BPSデータシーケンスを固定したメインサイトで観察する。時刻データがメインサイトから移動ユニットに伝送される。移動ユニットは、既知のデータパターンおよび(メインサイトが観察した)その既知の到着時刻を使用して、取得帯域幅を50BPSデータレート未満に狭めることができる。
【0016】
この場合も、主な欠点は、測定した50BPSデータシーケンスを移動ユニットに伝送し、移動ユニットがデータを受信し、復調できなければならないことである。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】米国特許第5,812,087号
【発明の概要】
【発明が解決しようとする課題】
【0018】
したがって、当該技術分野では、GSM(登録商標)システムなどの、非同期ネットワークの一部であるGPSハンドセットで、測定時刻を決定する必要がある。
【課題を解決するための手段】
【0019】
(発明の概要)
本発明の第1の態様により、GPS受信機で時刻を決定する方法が提供される。方法は、所定の期間だけGPSメッセージからGPSデータを捕捉するステップと、予測されるデータパターンを捕捉データに配置するステップと、データ捕捉の開始時間と予測されるデータパターンの到着時刻との時間オフセットを決定するステップとを含む。
【0020】
本発明の第2の態様により、GPS受信機で時刻を決定する方法が提供される。方法は、所定の期間だけ相関後コヒーレントGPSデータを捕捉するステップと、予測されるデータパターンを捕捉データに配置するステップと、データ捕捉の開始時刻と予測されるデータパターンの到着時刻との時間オフセットを決定するステップとを含む。
【0021】
本発明の第3の態様により、GPS受信機で時刻を決定する方法が提供される。方法は、GPSメッセージを所定の中間周波数まで逓減するステップと、複数のサンプルを生成するよう中間周波数をサンプリングするステップと、複数のサンプルをメモリに記憶するステップと、各可視GPS衛星信号のコード位相を決定するステップと、メモリの各可視GPS衛星信号のドップラーシフトを決定するステップと、衛星のGPSデータを選択するステップと、複数の所定の期間にわたって相関後データの同相コヒーレント特徴を測定して記憶するステップと、複数の所定の期間にわたって相関後データの直交コヒーレント特徴を測定して記憶するステップと、同相および直交特徴と予測されるデータパターンとをコヒーレントに相関させるステップと、相関最大値が捕捉ステップの開始から時間オフセットの後に発生する状態で、相関最大値から時間オフセットを決定するステップとを含む。
【0022】
本発明の第4の態様により、GPS受信機で時刻を決定する方法が提供される。方法は、GPSメッセージを所定の中間周波数まで逓減するステップと、複数のサンプルを生成するよう中間周波数をサンプリングするステップと、複数のサンプルと各可視衛星PRNおよび各可視衛星ドップラーとを非コヒーレントに相関させるステップと、各可視GPS衛星信号で実時間コード位相および実時間ドップラーシフトを決定するステップと、衛星GPSデータを選択するステップと、複数の所定の期間にわたって相関後データの実時間同相コヒーレント特徴を測定して記憶するステップと、所定の複数の期間にわたって相関後データの実時間直交コヒーレント特徴を測定して記憶するステップと、同相および直交特徴を予測されるデータパターンにコヒーレントに相関させるステップと、相関最大値が非コヒーレント相関ステップの開始から時間オフセットの後に発生する状態で、相関最大値から時間オフセットを決定するステップとを含む。
【0023】
本発明の第5の態様により、GPS受信機で時間を決定する装置が提供される。装置は、GPS信号を中間周波数に逓減し、GPS信号ソースに接続することができるGPSダウンコンバータと;中間周波数データをディジタルデータに変換するためにダウンコンバータに接続されたアナログ−ディジタル変換器と;アナログ−ディジタル変換器に接続され、かつクロックに接続されたディジタルIFスイッチであって、所定のサンプル期間だけ周期的に閉鎖するようにクロックによって制御されるディジタルIFスイッチと;ディジタルIFスイッチに接続され、かつディジタルIFスイッチの閉鎖時に入手可能な複数のディジタルIFデータを記憶することができるIFメモリと;IFメモリに接続され、複数のディジタルIFデータのコード位相特徴を決定し、ドップラー特徴を決定し、信号強度特徴を決定することができる非コヒーレントGPS相関器と;IFメモリおよび非コヒーレントGPS相関器との両方に接続され、同相および直交コヒーレント測定値を生成するコヒーレントGPS相関器と;コヒーレントGPS相関器に接続され、周期的に閉鎖して複数の同相および直交測定値を生成するメモリ記憶スイッチと;メモリ記憶スイッチに接続され、複数の同相および直交測定値を記憶することができるサンプルメモリと;サンプルメモリおよび予測されるデータパターン記憶に接続された相関器であって、複数の同相および直交測定値を予測されるデータパターンにコヒーレントに相関させて、相関出力を生成する相関器と;相関器に接続され、かつ相関出力を積分して積分出力を生成するコヒーレント積分器と;コヒーレント積分器に接続され、かつ積分出力を大きさを検出して、複数の積分大きさを生成する大きさ決定器と;大きさ決定器に接続されて、複数の積分大きさを記憶する大きさ対遅延メモリと;大きさ対遅延メモリに接続されて、最大積分大きさを決定することができる最大積分大きさ決定器と;を備え、最大信号大きさの遅延時間が時間オフセットである。
【0024】
本発明の第6の態様により、GPS受信機で時刻を決定する装置が提供される。装置は、GPS信号を中間周波数に逓減し、GPS信号ソースに接続することができるGPSダウンコンバータと;中間周波数データを複数のディジタルデータに変換するためにダウンコンバータに接続されたアナログ−ディジタル変換器と;アナログ−ディジタル変換器に接続され、コード位相特徴を決定し、ドップラー特徴を決定し、複数のディジタルデータの信号強度特徴を決定することができる非コヒーレントGPS相関器と;アナログ−ディジタル変換器および非コヒーレントGPS相関器の両方に接続され、同相および直交コヒーレント測定値を生成するコヒーレントGPS相関器と;コヒーレントGPS相関器に接続され、周期的に閉鎖して複数の同相および直交測定値を生成するメモリ記憶スイッチと;メモリ記憶スイッチに接続され、複数の同相および直交相関後測定値を記憶することができるサンプルメモリと;サンプルメモリおよび予測されたデータパターン記憶に接続された相関器とであって、複数の同相および直交測定値を予測されるデータパターンにコヒーレントに相関させて、相関出力を生成する相関器と;相関器に接続され、かつ相関出力を積分して積分出力を生成するコヒーレント積分器と;コヒーレント積分器に接続され、かつ積分出力の大きさを検出して、複数の積分大きさを生成する大きさ決定器と;大きさ決定器に接続されて、複数の積分大きさを記憶する大きさ対遅延メモリと;大きさ対遅延メモリに接続されて、最大積分大きさを決定することができる最大積分大きさ決定器と;を備え、最大信号大きさの遅延期間が時間オフセットである。
【0025】
本発明の以上のおよびその他の特徴および利点は、以下の本発明の好ましい実施形態を添付図面と組み合わせて説明することにより、さらに深く理解される。
【図面の簡単な説明】
【0026】
【図1】GPSデータワードを示す。
【図2A】GPSデータワードのデータセグメント捕捉に使用する1秒の捕捉時間枠の使用を示す。
【図2B】GPSデータワードのデータセグメント捕捉に使用する1秒の捕捉時間枠の使用を示す。
【図3】本発明の方法の第1実施形態の流れ図を示す。
【図4】本発明の方法の第2実施形態の流れ図を示す。
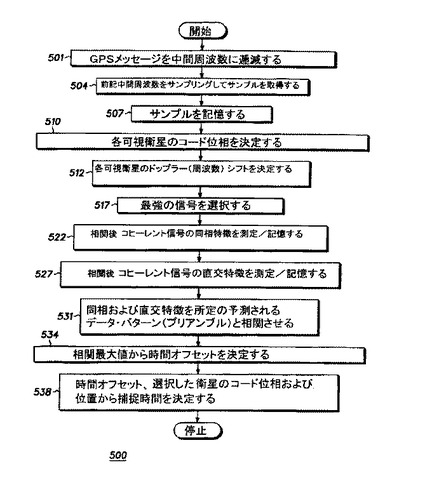
【図5】本発明の方法の第3実施形態の流れ図を示す。
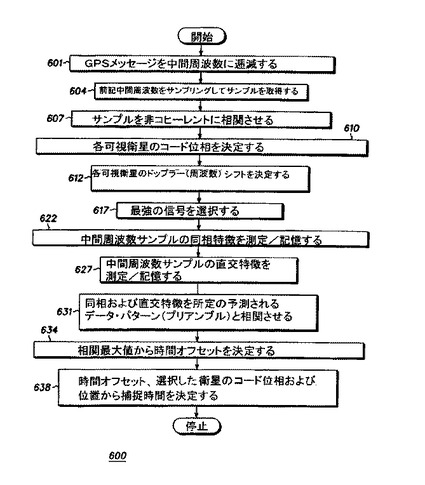
【図6】本発明の方法の第4実施形態の流れ図を示す。
【図7】GPSハンドセットで時間を決定する装置の第1実施形態のブロック図を示す。
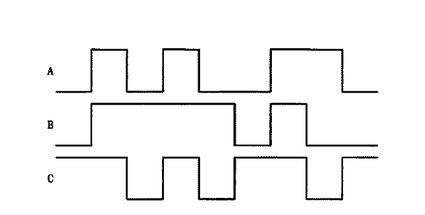
【図8】信号AおよびBを相関させて出力信号Cを生成する方法を示す。
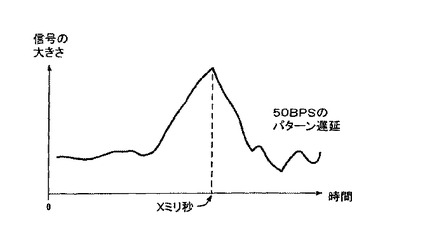
【図9】最大積分大きさが予測されたデータパターンの開始を指示する方法を示す。
【図10】信号IF捕捉メモリを使用しない装置の第2実施形態のブロック図を示す。
【発明を実施するための形態】
【0027】
(発明の詳細な説明)
非同期GPSハンドセットで時刻を決定する低コストの方法を、外部受信機または独立した計時装置での通信リンクおよびデータ転送を必要とせずに実行する。GPS衛星信号の予測可能な構造が、ハンドセットでの時刻決定を補助する。
【0028】
50BPSデータパターンまたはデータシーケンスが精密に分かり、時間の関数として精密に計算することができる(すなわち確定的)衛星同報通信データ(それぞれが6秒毎に反復する)は少なくとも3つのセグメントがある。これらの既知で予測可能なデータシーケンスまたはデータパターンを、複数のデータビットにわたって相関し、使用して、50BPSデータメッセージの個々のビットを復調するにはGPS信号が弱すぎる場合でも、精密な時刻を決定することができる。
【0029】
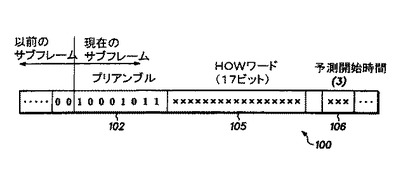
図1は、各GPS衛星が6秒毎に伝送するGPSデータワード100を示す。GPSデータワード100は、プリアンブル102、HOWワード105、およびサブフレームID106を含む。プリアンブル102は、各衛星で同じである所定の8ビット識別子を含み、同じパターンが6秒毎に反復する。また、以前のサブフレームからの直前の2ビットは常に同じ(00)であり、したがって衛星毎に常に合計10ビットが同じである。この文書ではこれ以降、「プリアンブル」は、直前サブフレームの最後の2ビット(00)と現在のサブフレームの冒頭にある8ビットのシーケンスを有する10ビットのシーケンスを含むものとする。プリアンブル102は、50BPSデータレートに基づいて各衛星が伝送するのに200ミリ秒かかる。HOWワード105は、次のサブフレームの第1ビットの週時刻を規定する17ビット長のワードである。サブフレームID106は、5個の可能なサブフレームそれぞれの内容を規定する3ビットのフィールドである。HOWワード105は伝送に340ミリ秒かかり、サブフレームID106は伝送に60ミリ秒かかる。
【0030】
その結果、10ビットのプリアンブル102は常に同じかつ既知であり、17ビットのHOWワード105および3ビットのサブフレームID106は、時刻の関数として予測可能である。新しいHOWワード105およびサブフレームID106は、6秒の間隔でメッセージに現れるので、ハンドセットでローカル時間を3秒以内まで分かれば、サブフレーム毎に17ビットのHOWワード105および3ビットのサブフレームID106の精密なパターンが分かる。ハンドセットのローカル時間を3秒以内に維持することは、既にどのディジタルハンドセットの部品にもなっている低コストで低出力の実時間クロックの機能内で、容易に実行される。
【0031】
50BPSメッセージの各ビットは、1.023MHzで伝送される1023ビットスプレッディングゴールドコードとコヒーレントで、これ自体も精密な衛星クロックに対してコヒーレントである。ゴールドコードはデータビット毎に20回反復し、各ゴールドコードビットの20の発生を復号するのに約20ミリ秒の期間を必要とする。
【0032】
50BPSメッセージ全体が衛星クロックと同期しているので、50BPSメッセージの各ビットを衛星から伝送する時間は精密に制御されると共に既知であり、精密な時刻を指示するのに使用することができる。前述したように、GPS地上制御セグメントは、各衛星の精密なクロックを数ナノ秒の正確さまで維持する(すなわち操作する)。その結果、プリアンブル102、HOWワード105、およびサブフレームID106の衛星からの伝送時間が精密に分かる。これらの既知または予測可能なデータビットパターンの受信時間を同期させると、信号の飛行時間(衛星と受信機間の伝搬遅延)および衛星クロック誤差を予測されるビットの受信時刻に加算することにより、GPS衛星からGPS受信機へと精密な絶対ローカル時間を伝送することができる。伝搬遅延および衛星クロック誤差は、衛星の同報通信人工衛星軌道暦およびクロック補正データを知ることにより受信機で計算可能であり、距離測定値から位置を計算するために、これらのデータも必要である。
【0033】
GPSデータワード100の到着時刻を使用して、GPSハンドセット内で自由に動作する局所クロックを校正することができる。校正方法は、Kingの米国特許第5,893,044号で教示され、これは引用により本明細書に組み込まれる。プリアンブル102および/またはHOWワード105および/またはサブフレームID106の到着時間(TOA)は、飛行中の衛星距離の測定時間の測定に使用するか、任意選択でメモリへの捕捉時間の測定に使用することができる。GPS信号の捕捉および相関のオンザフライ(転送時)測定は、GPS信号が強力である場合に使用することができ、GPS信号の捕捉および相関のメモリ方法は、信号が弱いか不確実である場合に使用することができる。
【0034】
メモリを使用する場合、メモリは、いずれか1つまたは全てのデータセグメントを含むのに必要なメモリより大きいことが好ましい。捕捉時間は、本発明の技術により、またはKingの米国特許第5,893,044号によって教示された技術により、またはネットワークからハンドセットに送信されたパルスまたはメッセージなど、他の粗い時間基準を使用することにより、周期的に再校正した自由作動の局所実時間クロックで制御することが好ましい。重要なのは、捕捉間隔開始時間が、1つのサブフレームデータパターンの開始を他と区別することができるのに十分な正確さ、またはせいせい3秒の誤差であることである。データセグメントをメモリ(予備相関のためのIFメモリまたは相関後メモリ)に捕捉したら、データセグメントの精密な到着時間を直接測定し、したがってデータ捕捉時間を、したがってレンジ測定時間を確立することができる。これは、既存のGSM(登録商標)セルラー装置のハードウェアを広範に改造したり、既存の通信ネットワークに追加の構成要素を追加したり、特殊なネットワークメッセージを送信したりする必要なく実行することができる。
【0035】
GPS受信機またはハンドセットは独自の内部クロックを有することができる。しかし、この内部クロックは、GPS信号データの到着時間を正確に追跡するのに必要な正確さを有しなくてもよい。代わりに、内部クロックは、GPSデータメッセージ100の到着時間を抽出し、測定した到着時間を使用して内部クロックを周期的に再校正することにより、周期的に再校正することができる。最悪のケースでは、GPSハンドセットの局所実時間クロックが、約50PPMの誤差を有する32kHzの発振器を使用できることが予想され、1日に約2回の再校正が必要となる(1秒の正確さドリフト)。
【0036】
言うまでもなく、ハンドセットの局所実時間クロックが変動するにつれ、GPSデータメッセージ100の測定された到着時間は変動するが、局所実時間クロック(この変化時間レートもGPSによって校正することができる)の変動が比較的少ないので、測定した到着時間を使用して、局所実時間クロックの再校正に有用なオフセットを決定することができる。例えば、図1では、以前のサブフレームおよび現在のサブフレームを示す縦線は、GPSハンドセットがGPSデータメッセージ100の開始を予測する場所を示すことができる。したがって、実際の開始時間とGPSハンドセットが開始を予測する時間との差を測定すると、GPSハンドセットのクロック時間および変化時間レートの再校正に使用できる時間オフセットが得られる。
【0037】
局所実時間クロックが校正されていない場合は、探索プロセスを使用してセグメントをサンプリングし、既知のデータパターンまたはシーケンスに対してこれを検査し、次に検査間隔を別のセグメント長にスライドさせて、所望の既知のデータパターンまたはシーケンスが発見されるまで反復する。
【0038】
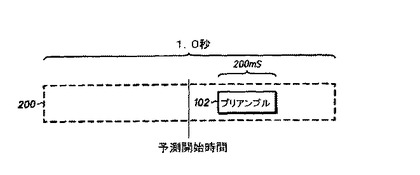
図2A〜図2Bは、データセグメントを捕捉するための1秒の捕捉時間枠200の使用を示す。入りGPS信号は、この実施形態では1秒の期間、捕捉される。所望に応じて他の捕捉時間枠を使用してもよい。図2Aでは、(クロックドリフトのために)GPSハンドセットの予測開始時間より前にプリアンブル102が到着する。しかし、捕捉時間枠200のサイズのため、プリアンブル102全体が捕捉され、記憶される。プリアンブルの予測される開始時間の前および後のGPSデータが捕捉されるように1秒の捕捉時間枠が好ましい。したがって、捕捉されたデータを検査して、いつプリアンブルが開始したか正確に求めることができる。
【0039】
図2Bでは、プリアンブル102が予測開始時間より後に到着する。1秒の捕捉時間枠200を使用することにより、局所ハンドセットクロックは、多数のビットをオフしてもよく、それでもプリアンブル102全体をなお捕捉することができる。
【0040】
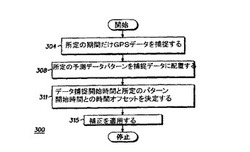
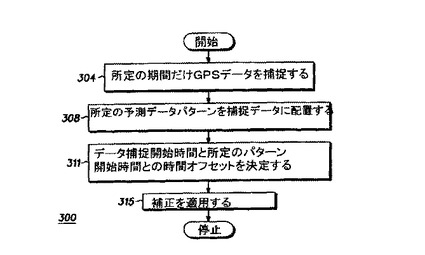
図3は、GPSハンドセットの時刻を決定する方法の第1実施形態の流れ図300を示す。ステップ304で、GPSデータを所定の期間だけ捕捉する。好ましい実施形態では、GPSデータは、図2Aおよび図2Bで示すように、約1秒間捕捉されるが、他の期間を使用してもよい。開始時間および捕捉事象の継続時間は、局所実時間クロックによって制御される。局所実時間クロックは予め(本明細書で説明する方法、または従来のGPS信号処理技術によって)校正され、ドリフトしてもよい。
【0041】
局所実時間クロックの正確さは、例えば、ハンドセット基準発振器などの駆動発振器の安定性に基づいて決まる。GSM(登録商標)およびCDMAハンドセットでは、ハンドセット基準発振器は通常、約0.05PPMの安定性を有する(すなわち、発振器は100,000,000回振動する毎に約±5回変動する)。局所実時間クロックは、単純な32KHzの自由作動発振器で駆動してもよい。
【0042】
ステップ308では、確定的特徴または所定の特徴(例えば、プリアンブル、HOWワード、サブフレームIDのコードレプリカなど)を有する予測データパターンを捕捉データに配置する。好ましい実施形態では、これは図1に示すプリアンブル102である。しかし、HOWワード105のように、確定的特徴または所定の特徴を有する他の予測データパターンを使用してもよい。
【0043】
ステップ311では、捕捉開始時間から予測されたデータパターンまたはデータシーケンスの到着時間までの時間オフセットを決定する。ステップ315では、衛星から受信機への信号の伝搬遅延および衛星オフセットクロック補正を適用し、精密なローカル時間の測定値を生成する。この時間オフセットを使用して、GPSハンドセットのクロックを再校正し、さらに衛星レンジ測定の時間スタンピングのベースにすることができる。
【0044】
図4は、GPSハンドセットで時間を決定する方法の第2実施形態の流れ図400を示す。流れ図400は、進行中に方法を実行する点のみが、第1の実施形態の流れ図300と異なる。したがって、ステップ404では、ステップ304のようにGPSデータをただ捕捉するのではなく、方法は相関後コヒーレントGPSデータを捕捉する。ステップ408はステップ308と等しく、ステップ411はステップ311と等しい。
【0045】
流れ図300または流れ図400のいずれかを使用してもよいことを理解されたい。実時間オンザフライ方法が好ましいが、代わりにGPS信号をメモリに記憶してから、処理してもよい。メモリは一般に、受信機が相関ロックを喪失し、したがって信号の受信時に実時間でそれをもはや相関できない場合に使用する。これは、信号受信を改善または維持したり、受信信号の強度を改善したり、電力消費量を削減したり、計算負荷を長時間分配したりするために実行することができる。
【0046】
図5は、GPSハンドセットで時間を決定する方法の第3実施形態の流れ図500を示す。ステップ501では、受信したGPSメッセージを中間周波数に逓減する。これは当該技術分野で一般に知られ、データ処理および取扱いをさらに容易にするために実行される。
【0047】
ステップ504では、中間周波数をサンプリングし、複数のディジタルサンプルを取得する。サンプリングは、通常、例えば、1秒などの所定の期間にわたって実行され、その結果、好ましい実施形態では200のサンプルが生成される。
【0048】
ステップ507では、ディジタルIFサンプルを記憶する。好ましい実施形態では、これは、例えば、ランダムアクセスメモリなどの一般的メモリに記憶される。しかし、ディジタルIFサンプルは任意のタイプのディジタル記憶装置に記憶することができる。
【0049】
ステップ510では、データを受信した可視衛星毎にコード位相を決定する。ステップ512では、各可視衛星で受信したデータで、ドップラー(または周波数)シフトを決定する。GPSシステムは、地球の周囲の軌道に分布した24の衛星を使用し、一般に、少なくとも4つの衛星が、空の見通しがよい状態で地上の任意の点から見える。
【0050】
ステップ517では、処理のために最も強い信号を選択する。方法は、GPS信号の受信が比較的不良である期間中に正確な時間を決定するよう設計されるので、最強の信号を選択すると、最も確実であり、成功の可能性も最大になる。時間決定に必要な最小数の信号を処理するだけで計算時間、およびその結果としての電力消費量が減少され、その信号は1つの衛星の信号である。言うまでもなく、正確な時間を決定するのに、最強の信号が絶対的に必要なわけではない。追加的に(しかし次善的に)、受信機で複数の信号を処理して、時間を決定することができる。
【0051】
ステップ522では、相関後コヒーレント信号の同相特徴を測定し、記憶する。ステップ527では、相関後コヒーレント信号の直交特徴を測定し、記憶する。ステップ522および527は同時に実行することが好ましい。
【0052】
ステップ531では、ステップ522および527で決定した同相および直交特徴を、予測されるデータパターンとコヒーレントに相関させる。好ましい実施形態では、これはプリアンブル102、HOWワード105および/またはサブフレームID106である。実際には、ステップ531は受信信号の同相および直交特徴を予測されるデータパターンと比較して、受信データのシーケンスにおいて予測されるデータパターンがいつ開始するか決定する。
【0053】
ステップ534では、相関最大値から時間オフセットを決定する。ステップ531の相関はピーク(図9に見ることができる)を生成し、このピークは最大相関点、すなわち入りデータが予測されるデータパターンと一致する点である。したがって、データ捕捉開始からピークまでの時間が、予測されるデータパターンの開始が生じる時間オフセットを与える。
【0054】
ステップ538では、ステップ534で決定した時間オフセット、選択された衛星のコード位相および位置、衛星に対応するクロック補正(任意のGPS受信機の標準)、特定のGPSデータセグメントの既知の到着時間(プリアンブル102、HOWワード105および/またはサブフレームID106)、およびハンドセットの地理的位置から捕捉時間を決定する。ハンドセットの位置は、初期推測からの反復によって計算することができ、初期推測は、例えば、最寄りのセルラー基地局の位置である(各セルラー基地局は既知の緯度と経度を有する)。このデータは、時間オフセットを決定するのに十分である。次に、時間オフセットを使用してハンドセットの実時間クロックを再校正し、GPS衛星システムとの時間同期を維持することができる。
【0055】
図6は、GPSハンドセットで時間を決定する方法の第4実施形態の流れ図600を示す。流れ図600は、ステップ607で流れ図600がGPSサンプルを各可視衛星の疑似ランダムノイズ(PRN)コード(すなわち各衛星の一意の識別子で、ゴールドコードとしても知られる)および各可視衛星のドップラー特徴と非コヒーレントに相関させる点で、第3実施形態の流れ図500と異なる。図6に示す他のステップは、図5の対応するステップと同じである。図4の方法と同様、図6の方法はオンザフライの時間オフセット決定であり、ディジタルIFメモリを必要としない。
【0056】
流れ図500または流れ図600のいずれを使用してもよいことを理解されたい。実時間のオンザフライ方法が好ましいが、代替的にGPS信号をメモリに記憶してから、処理してもよい。メモリは一般に、受信機が相関ロックを喪失し、したがって信号の受信時に実時間でそれをもはや相関できない場合に使用する。これは、信号受信を改善または維持したり、受信信号の強度を改善したり、電力消費量を削減したり、長時間にわたって処理を延長したりするために実行することができる。
【0057】
図7は、GPSハンドセットで時間を決定する装置700の第1実施形態のブロック図を示す。装置700は、アンテナ704、GPSダウンコンバータ709、アナログ−ディジタル変換器(ADC)711、相関前ディジタルIFスイッチ713、局所実時間クロック715、ディジタルIFメモリ721、取得補助データ724、非コヒーレントGPS相関器726、コヒーレントGPS相関器729、相関後コヒーレントメモリ記憶スイッチ732、サンプルメモリ735、クリーンアップミキサ738、相関器742、予め記憶された予測データパターン744、時間拡張器748、時間遅延750、コヒーレント積分器754、大きさ決定器757、大きさ対遅延メモリ762、および最大積分大きさ決定器766を含む。
【0058】
アンテナ704は、GPS信号を受信し、これをGPSダウンコンバータ709に送る。GPSダウンコンバータ709はGPSデータ信号を中間周波数(IF)に変換し、これをADC711に送る。ADC711はIFデータをディジタルIFデータに変換し、ディジタルIFデータをディジタルIFスイッチ713に送る。ディジタルIFスイッチ713は、局所実時間クロック715の制御下で、ディジタルIFデータを周期的にサンプリングし、周期的サンプル(相関前)はディジタルIFメモリ721に記憶される。
【0059】
標的ビットがNミリ秒長のメモリに適切に捕捉されるのを保証するため、実時間クロック715の正確さは(N−M)/2ミリ秒以内に維持しなければならない。好ましい実施形態ではNが1秒、Mが200ミリ秒であるとすると、クロックは約±200ミリ秒もドリフトすることができ、それでも標的データシーケンスの捕捉に有用である。
【0060】
しかしながら、局所実時間クロック715は周期的に再校正しなければならない。再校正は、幾つかの方法で実施することができる。例えば、1)各GPS位置決め要求で本明細書に記載した方法を適用するか、2)実時間クロック715が所定の許容不能な量ドリフトするよう予想される場合は、自動的に再校正するか、3)ハンドセットから空の見晴らしがよい場合は、直接GPS信号から従来通のGPSが時間を抽出することができるか、4)ハンドセットが充電などの遠隔動力を有している場合は、従来のGPS信号検出器から時間を取得し、可能な場合はGPS信号から時間を直接取得するか、5)カーキットに内蔵された埋め込み式GPSセンサから、または、例えば、ブルートゥースなどの無線インタフェースを介して車両自体から、カーキットからハンドセットへ時間を転送するか、6)非同期ネットワークを通して粗い時間を伝送する。
【0061】
非コヒーレントGPS相関器726は、受信してディジタルIFメモリ721に記憶されるGPS衛星信号のコード位相特徴、ドップラー特徴、および信号強度を決定する。ハードウェアはこのポイントまで複数のGPS衛星信号を受信することができ、ディジタルIFメモリ721に記憶されたディジタルIFデータは、幾つかの衛星信号のデータを含むことを理解されたい。前述したように、任意の時刻にGPSハンドセットの視野には最少でも4つのGPS衛星があり、場合によってはそれ以上ある。したがって、少なくとも4つのGPSデータ信号が存在する。
【0062】
非コヒーレントGPS相関器726は、取得補助データ724からの情報も受信し、これは既知および予測される衛星位置などの衛星の配置を含む。この取得補助データ724によって、非コヒーレントGPS相関器726は衛星信号を区別し、検出可能な各衛星信号のコード位相(0から1ミリ秒の時間オフセット)およびドップラー周波数(±4KHz)を決定することができる。
【0063】
非コヒーレントGPS相関器726は、時間領域の相関器でよく、相関器は連続する出力を1ミリ秒までコヒーレントに合計する。このような相関器の例が、Kennedyの米国特許第5,148,452で示され、これは引用により本明細書に組み込まれる。代替的に、非コヒーレントGPS相関器726は、Krasnerの米国特許第5,663,734号、またはMaその他の米国特許第4,998,111号で開示されているような周波数領域の相関器でもよく、それらは両方とも引用により本明細書に組み込まれる。非コヒーレント相関器は、50BPSデータパターンを知る必要がなく、従来のGPS信号処理技術が失敗する環境で、信号のコード位相およびドップラーシフトを抽出できることに留意することが重要である。また、非コヒーレントGPS相関器726は、専用のハードウェアで実装するか、プログラム可能なディジタル信号プロセッサにコード化したソフトウェアによって生成することができる。
【0064】
コヒーレントGPS相関器729は、同様にディジタルIFメモリ721に接続され、非コヒーレントGPS相関器726にも接続される。ディジタルIFメモリ721からのデータが(単チャネル)コヒーレントGPS相関器729に供給され、コヒーレントGPS相関器729は、所定のコード位相およびドップラーで信号の1ミリ秒同相および直交測定を実行する。コヒーレントGPS相関器729は単チャネル相関器であり、非コヒーレントGPS相関器726から受信した最強GPSデータ信号の同相および直交測定値を生成する。この時点で、最強のGPS信号は選択されており、時間決定の取得の信頼性および可能性を向上させるために、この時点から使用される。非コヒーレントGPS相関器726およびコヒーレント相関器729は、2つの異なるモードで使用される同じ1つの相関器でもよいことに留意することが重要である。
【0065】
非コヒーレントGPS相関器726と同様、コヒーレントGPS相関器729も専用のハードウェアで実装するか、プログラム可能なディジタル信号プロセッサにコード化したソフトウェアによって生成することができる。
【0066】
コヒーレントGPS相関器729には、相関後メモリ記憶スイッチ732が接続され、これはサンプルメモリ735に接続されて、サンプルメモリ735に記憶される同相および直交測定サンプルワードを生成する。メモリ記憶スイッチ732は、好ましい実施形態では1ミリ秒のサンプルを採取し、ディジタルIFメモリ721に記憶されたNミリ秒のデータに対応する同相および直交測定値のNワードの複素数データを生成する。1ミリ秒のサンプルは拡散が防止されており(GPS信号は拡散スペクトル信号である)、ほぼゼロのドップラーであり、したがってサンプルワードに残っている唯一の信号は50BPSデータパターン(およびノイズ)である。
【0067】
サンプルメモリ735にはクリーンアップミキサ738が接続され、これは記憶された同相および直交測定値から残りのドップラー特徴を除去する(サンプルメモリ735は、サンプルから全て、またはほとんど全てのドップラーを除去した同相および直交測定値を含む)。これは、相関後サンプルがメモリに既に記憶され、再生することができるので、複数の技術を使用し、反復的な方法で実施することができる。例えば、1つの方法は、大きさ対遅延メモリ762のピーク信号を最大にするドップラーワイプオフ周波数を見出すようにサンプルメモリ735に記憶された完全なサンプルセットから複数の相関で残りのドップラーワイプオフ周波数の反復的ステッピングを実行する。これを最善に実行するため、コヒーレント相関器729のドップラー信号の大部分をワイプオフするのに使用する推定ドップラー周波数は、サンプルメモリ735に充填する間、一定に維持するとよい。このようにして、一定の残りのドップラーワイプオフ周波数を使用することができるか、あるいは動力学を受ける受信機の場合は、チャープのある(一定でなく、一定速度の周波数変化で変化する)残りのドップラーワイプオフ周波数も、反復的試行の一部として試みることができる。
【0068】
相関器742はクリーンアップミキサ738および予想データパターン744に接続される。相関器742は、予想データパターン744に同相および直交測定値を相関させる。
【0069】
好ましい実施形態では、予想データパターン744はGPSデータメッセージ100のプリアンブル102、HOWワード105および/またはサブフレームID106である。予想データパターン744は時間拡張器748に接続され、これは各ビットの継続時間を1ミリ秒から20ミリ秒に拡張し、時間拡張器748はさらに遅延器750に接続される。遅延器750は相関器742に接続される。したがって、予想される50BPSデータパターンは、サンプルメモリ735に記憶されたサンプルワードの長さに一致するため、200ミリ秒の長さのデータパターンに変換される(プリアンブル102の場合)。相関器742は、受信して記憶したデータをこの予測データパターンとコヒーレントに相関させ、データパターンに相関がある場合は最高値を生成する。これが図8に図示され、ここで信号AおよびBは相関して、出力信号Cを生成する。したがって、信号Cは信号AおよびBが同じ値を有する場合はディジタルの1を含み、信号AとBが異なる場合はディジタルのゼロを含む。これは、ハードウェアの排他的ORゲート、またはこのメモリに記憶されたマイクロプロセッサのアルゴリズムによって実行することができる。
【0070】
コヒーレント相関器754は相関器742に接続され、相関出力を積分して積分出力を生成する。N−M遅延コヒーレント積分を実行する作業の多くは、マイクロプロセッサまたは専用ハードウェアに記憶された再帰的アルゴリズムにより実行することができるので、必要な作業数が大幅に減少することに留意されたい。また、乗算演算は全て+1または−1で実行されるので、計算が大幅に単純になる。
【0071】
コヒーレント相関器754には大きさ決定器757が接続され、積分結果の大きさを検出する。大きさ決定器757からの複数の積分大きさが、大きさ対遅延メモリ762に記憶される。好ましい実施形態では、N−M大きさ値の合計が生成され、大きさ対遅延メモリ762に記憶される。パラメータNは、サンプルメモリ735のワードのサイズであり、NはディジタルIFメモリ721に捕捉されたデータのミリ秒数を反映する。ディジタルIFメモリが1秒のデータ(すなわち、1000個のサンプル)を含む場合、パラメータNは1,000である。パラメータMは既知のデータパターンの長さである。プリアンブル102を捕捉する場合、パラメータMは200ミリ秒の長さである。同様に、HOWワード105では、パラメータMは340ミリ秒の長さである。積分大きさの数は、ADC711の後に捕捉された元のIFデータ内のサンプル数に対応する。
【0072】
次に、最大積分大きさ決定器766が大きさ対遅延メモリ762に記憶されたデータを使用して、最大積分結果が達成されるポイントを決定する。これは図9に図示され、ここで最大積分大きさは予測データパターンの冒頭を指示する。信号捕捉開始時(時間ゼロポイント)と最大積分大きさ測定時間(ピーク)との間の時間オフセットが、求める時間オフセットである。次に、時間オフセットを(選択された衛星のコード位相および位置、および対応する衛星クロック補正とともに)使用して、図5のステップ538および図6のステップ638との関連で上述したように、実際の(ローカル)時間を決定し、ハンドセットの実時間クロックを再校正することができる。
【0073】
同様の方法で、図10に示すようなGPSハンドセットで時間を決定する装置の第2実施形態を使用する。ここでは図7に示したようなディジタルIFサンプルメモリ721およびIFスイッチ713は削除されている。図10を参照すると、ローカル実時間クロック1015が、サンプルメモリ1035に記憶された相関後同相および直交サンプルの捕捉時間スイッチ1032を直接制御する。残りの装置は、図7に関して述べたものと同じである。したがって、装置1000は、時間オフセットを決定するため、GPS信号を進行中に処理するよう設計される。
【0074】
要素732〜766および要素1032〜1066は、全て、制御マイクロプロセッサ上で実行するソフトウェアアルゴリズムで好ましく実行でき、したがって追加のハードウェアを必要としない。
【0075】
好ましい実施形態について以上で詳細に説明してきたが、本発明は記載されたような特定の実施形態に制限されるものではない。本発明の概念から逸脱することなく、当業者には本明細書で記載した特定の実施形態を多様に使用し、改造し、逸脱できることが明白である。
【技術分野】
【0001】
(関連出願の相互参照)
本出願は、1999年2月19日に出願された係属中の米国実用特許出願第09/253,318号、1999年2月19日に出願された係属中の米国実用特許出願第09/253,662号、および1999年2月19日に出願された係属中の米国実用特許出願第09/253,679号に基づく優先権を主張する。
【0002】
(発明の分野)
本発明は、概してGPS受信機に関し、特にGPSハンドセットに関する。
【背景技術】
【0003】
(発明の背景)
全地球測位システム(GPS)は、世界中のどこにGPS受信機があるときにもGPS受信機に正確な位置情報を与えるため米国国防省が開発した衛星に基づくシステムである。したがって、適切に装備されたGPS受信機は、位置が望まれるあらゆる状況で使用することができ、通常は3次元の位置座標を生成する。GPSシステムは、12時間の軌道で地球を周回する24個以上の衛星で構成された衛星軌道配置(コンステレーション)によって可能になる。衛星は6つの軌道面に配置され、各軌道面が4つの衛星を含む。軌道面は60°隔置され、赤道面から約55°傾斜する。この配置により、空の見通しがきく地球上の任意の点で、いつでも4個〜12個の衛星が見えることが確実にされる。
【0004】
GPS衛星は、GPS受信機が使用すべきデータを伝送する。データには、衛星位置データ(人工衛星軌道暦データ)および衛星クロック補正データが含まれる。GPS信号は、1.023Mhzチップレート(0.001秒反復インターバル)において1023ビット長のGoldスプレッディングコードで2相変調した搬送信号を含む。これは、50ビット/秒(BPS)のレートのデータビット(1データビット当たり20ミリ秒のレートでの伝送)でも変調する。50BPSデータは、GPSに基づく時刻(すなわち、GPS衛星のクロック時刻)を決定するための情報および地理的位置を決定するための情報を含む。
【0005】
GPS信号に含まれるデータの詳細情報は、Interface Control Document ICD−GPS−200で入手可能であり、これは1991年に改訂され、Rockwell International Corporationから発行され、引用により本明細書に組み込まれる。GPSメッセージに含まれるクロック時刻は、衛星で精密に同期された絶対時刻信号である。すなわち、GPS配置にあるすべての衛星は、衛星から地上局への信号伝搬時間を考慮に入れた地上基準局によって同期される。この方法で、配置にあるどの衛星も、衛星で時間を同期され、絶対時刻エラーは、数ナノ秒〜数十ナノ秒以内で精密に制御される。
【0006】
絶対時刻信号は、位置を正確に決定するために、GPS受信機によって使用することができる。位置がほぼ判明したら、受信機内の絶対時刻も、衛星同報通信メッセージで受信機が観察した精密な時間を、受信機と衛星間の計算可能な伝搬遅延でオフセットすることにより知ることができる。
【0007】
受信機で絶対時刻を知ることは、GPS衛星が約4m/ミリ秒で移動しているので、重要なパラメータである。レンジ測定時刻に1ミリ秒の誤差がある場合、測定されたレンジには4メートルもの誤差があることもある。このレンジエラーは、次に幾何学的位置係数(GDOP、すなわち精密度の幾何学的希釈)を掛けて追加の位置エラーに翻訳され、これは4メートルの追加レンジエラーの何倍にもなることがある。
【0008】
50BPSデータに含まれる週の時刻(TOW)データフィールドは、絶対時刻信号と組み合わせられて、GPS受信機がローカル時間を正確かつ確実に決定するのを可能にする。TOWデータは、6秒間隔で全衛星から伝送される。TOWデータの検出は、信号の絶対値によって決定される。特定の信号絶対値レベルを下回ると、レンジ測定値を獲得することは可能であるが、TOWデータを復号することが不可能である。例えば、約30dB−Hz未満の信号レベルの場合は、50BPSメッセージの個々のメッセージビットを復号することが不可能になる。しかし、30dB−Hzよりはるかに下、20dB−Hz未満のレベルの信号でも信号補正を獲得することが可能である。Motorolaの出願第09/253,318号、第09/253,662号および第09/253,679号で採用した技術を使用して、補正検出精度をこれらのレベルまで拡張することができる。したがって、必要なのは、30dB−Hz未満の信号レベルで時刻を決定する方法である。
【0009】
GPS受信機は、常にGPS衛星同報通信データからローカル時間を確実に決定できるわけではない。GPSの機能は非常に有用であり、その結果、例えば、携帯電話および他のハンドヘルド電子装置などの、様々な装置に組み込まれている。このような携帯性のため、それらの装置は往々にしてビルの谷間を走行する車両に置かれたり、建物または他の障害物の中に持ち込まれたりする。当然の結果として、GPS信号は遮断されるか、受信状態が悪くなり得る。このため、50BPS絶対時刻信号の受信が不確実になることがある。このような場合は、位置測定が可能になるようにGPSハンドセットが正確な時間測定値を獲得することが望ましい。GPS衛星は約4m/ミリ秒の速度で移動するので、レンジ測定の時刻が正確に分からなければ、レンジ測定が、したがって位置測定が、それに比例する誤差を有することになる。例えば、測定時刻が20ミリ秒の誤差を含む場合、レンジ測定には80メートルもの誤差があり、その結果、幾何学的形状に応じて、位置測定に数百メートルの誤差が生じる恐れがある。
【0010】
CDMA(符号分割多元接続)携帯電話などの、一部の携帯電話装置では、インフラストラクチャが同期され、各基地局がネットワークのGPS受信機から精密な時刻を受信する。次に、CDMA基地局は、時刻をモバイル機器に伝送することによってモバイル機器を同期し、CDMA電話ハンドセットの時刻を1マイクロ秒(+伝送遅延)のオーダーの精度で分かるようにする。
【0011】
例えば、氾欧州デジタルセルラーシステム(GSM(登録商標))携帯電話などの非同期GPS装置では、精密な時刻情報が望ましいが、概ねネットワークから発する信号から入手することができない。しかし、適切なハードウェアおよび/またはソフトウェアを追加することにより、これらを同期するために既存のネットワークを改造することは非実用的であり、費用がかかる。
【0012】
関連技術は、様々な方法で上記の問題を解決しようとした。第1の手法は、Krasnerの米国特許第5,812,087号で与えられている。Krasnerは、ハンドセットのディジタルスナップショットメモリを使用して、データをランダム列で捕捉し、それを基地局に伝送する。基地局は、従来通りのGPS受信機を使用して、ディジタルスナップショットメモリで捕捉した50BPSデータビットの一部の到着時刻を測定する。基地局で測定したデータビットは、既知の到着時刻を有し、ディジタルスナップショットメモリで捕捉した未知のデータビットとの相関がとられる。最大の相関が得られると、移動メモリのデータ捕捉時刻を決定することができる。
【0013】
しかし、Krasnerの欠点は、遠隔の基地局のGPS受信機が必要とされることである。遠隔の基地局のGPS受信機が、1つまたは複数のGPS衛星からの現在のGPSデータシーケンスを測定し、これを移動ユニットに伝送しなければならない。あるいは、移動ユニットが検出後の補正データを基地に伝送してもよい。いずれの方法でも、手法では基地局と移動ユニット間で多数のビットを伝送する必要があり(例えば、12個の衛星がそれぞれ50ビット)、ハンドセットが、基地局で観察し、通信したパターンとの相関を後にとるため、受信データのサンプルを記憶する必要がある。
【0014】
第2の関連技術の手法では、位置測定ユニット(LMU)を非同期ネットワーク全体に配置する。LMUの目的は、非同期通信ネットワークが記憶する時刻とGPSの時間との時間オフセットを測定することである。個々のLMUが各基地局からのメッセージビットの到着時刻を測定し、各基地局の相対的時間オフセットを決定する。これは、(伝搬時間を決定するための)各基地局の位置およびLMUの位置に関する知識を使用し、LMU内部のGPS受信機によって遂行される。
【0015】
しかし、この第2の関連技術の手法は、通信ネットワークに追加の構成要素を必要とするので費用がかかる。複雑な解決策でもある。第3の関連技術の手法では、50BPSデータシーケンスを固定したメインサイトで観察する。時刻データがメインサイトから移動ユニットに伝送される。移動ユニットは、既知のデータパターンおよび(メインサイトが観察した)その既知の到着時刻を使用して、取得帯域幅を50BPSデータレート未満に狭めることができる。
【0016】
この場合も、主な欠点は、測定した50BPSデータシーケンスを移動ユニットに伝送し、移動ユニットがデータを受信し、復調できなければならないことである。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】米国特許第5,812,087号
【発明の概要】
【発明が解決しようとする課題】
【0018】
したがって、当該技術分野では、GSM(登録商標)システムなどの、非同期ネットワークの一部であるGPSハンドセットで、測定時刻を決定する必要がある。
【課題を解決するための手段】
【0019】
(発明の概要)
本発明の第1の態様により、GPS受信機で時刻を決定する方法が提供される。方法は、所定の期間だけGPSメッセージからGPSデータを捕捉するステップと、予測されるデータパターンを捕捉データに配置するステップと、データ捕捉の開始時間と予測されるデータパターンの到着時刻との時間オフセットを決定するステップとを含む。
【0020】
本発明の第2の態様により、GPS受信機で時刻を決定する方法が提供される。方法は、所定の期間だけ相関後コヒーレントGPSデータを捕捉するステップと、予測されるデータパターンを捕捉データに配置するステップと、データ捕捉の開始時刻と予測されるデータパターンの到着時刻との時間オフセットを決定するステップとを含む。
【0021】
本発明の第3の態様により、GPS受信機で時刻を決定する方法が提供される。方法は、GPSメッセージを所定の中間周波数まで逓減するステップと、複数のサンプルを生成するよう中間周波数をサンプリングするステップと、複数のサンプルをメモリに記憶するステップと、各可視GPS衛星信号のコード位相を決定するステップと、メモリの各可視GPS衛星信号のドップラーシフトを決定するステップと、衛星のGPSデータを選択するステップと、複数の所定の期間にわたって相関後データの同相コヒーレント特徴を測定して記憶するステップと、複数の所定の期間にわたって相関後データの直交コヒーレント特徴を測定して記憶するステップと、同相および直交特徴と予測されるデータパターンとをコヒーレントに相関させるステップと、相関最大値が捕捉ステップの開始から時間オフセットの後に発生する状態で、相関最大値から時間オフセットを決定するステップとを含む。
【0022】
本発明の第4の態様により、GPS受信機で時刻を決定する方法が提供される。方法は、GPSメッセージを所定の中間周波数まで逓減するステップと、複数のサンプルを生成するよう中間周波数をサンプリングするステップと、複数のサンプルと各可視衛星PRNおよび各可視衛星ドップラーとを非コヒーレントに相関させるステップと、各可視GPS衛星信号で実時間コード位相および実時間ドップラーシフトを決定するステップと、衛星GPSデータを選択するステップと、複数の所定の期間にわたって相関後データの実時間同相コヒーレント特徴を測定して記憶するステップと、所定の複数の期間にわたって相関後データの実時間直交コヒーレント特徴を測定して記憶するステップと、同相および直交特徴を予測されるデータパターンにコヒーレントに相関させるステップと、相関最大値が非コヒーレント相関ステップの開始から時間オフセットの後に発生する状態で、相関最大値から時間オフセットを決定するステップとを含む。
【0023】
本発明の第5の態様により、GPS受信機で時間を決定する装置が提供される。装置は、GPS信号を中間周波数に逓減し、GPS信号ソースに接続することができるGPSダウンコンバータと;中間周波数データをディジタルデータに変換するためにダウンコンバータに接続されたアナログ−ディジタル変換器と;アナログ−ディジタル変換器に接続され、かつクロックに接続されたディジタルIFスイッチであって、所定のサンプル期間だけ周期的に閉鎖するようにクロックによって制御されるディジタルIFスイッチと;ディジタルIFスイッチに接続され、かつディジタルIFスイッチの閉鎖時に入手可能な複数のディジタルIFデータを記憶することができるIFメモリと;IFメモリに接続され、複数のディジタルIFデータのコード位相特徴を決定し、ドップラー特徴を決定し、信号強度特徴を決定することができる非コヒーレントGPS相関器と;IFメモリおよび非コヒーレントGPS相関器との両方に接続され、同相および直交コヒーレント測定値を生成するコヒーレントGPS相関器と;コヒーレントGPS相関器に接続され、周期的に閉鎖して複数の同相および直交測定値を生成するメモリ記憶スイッチと;メモリ記憶スイッチに接続され、複数の同相および直交測定値を記憶することができるサンプルメモリと;サンプルメモリおよび予測されるデータパターン記憶に接続された相関器であって、複数の同相および直交測定値を予測されるデータパターンにコヒーレントに相関させて、相関出力を生成する相関器と;相関器に接続され、かつ相関出力を積分して積分出力を生成するコヒーレント積分器と;コヒーレント積分器に接続され、かつ積分出力を大きさを検出して、複数の積分大きさを生成する大きさ決定器と;大きさ決定器に接続されて、複数の積分大きさを記憶する大きさ対遅延メモリと;大きさ対遅延メモリに接続されて、最大積分大きさを決定することができる最大積分大きさ決定器と;を備え、最大信号大きさの遅延時間が時間オフセットである。
【0024】
本発明の第6の態様により、GPS受信機で時刻を決定する装置が提供される。装置は、GPS信号を中間周波数に逓減し、GPS信号ソースに接続することができるGPSダウンコンバータと;中間周波数データを複数のディジタルデータに変換するためにダウンコンバータに接続されたアナログ−ディジタル変換器と;アナログ−ディジタル変換器に接続され、コード位相特徴を決定し、ドップラー特徴を決定し、複数のディジタルデータの信号強度特徴を決定することができる非コヒーレントGPS相関器と;アナログ−ディジタル変換器および非コヒーレントGPS相関器の両方に接続され、同相および直交コヒーレント測定値を生成するコヒーレントGPS相関器と;コヒーレントGPS相関器に接続され、周期的に閉鎖して複数の同相および直交測定値を生成するメモリ記憶スイッチと;メモリ記憶スイッチに接続され、複数の同相および直交相関後測定値を記憶することができるサンプルメモリと;サンプルメモリおよび予測されたデータパターン記憶に接続された相関器とであって、複数の同相および直交測定値を予測されるデータパターンにコヒーレントに相関させて、相関出力を生成する相関器と;相関器に接続され、かつ相関出力を積分して積分出力を生成するコヒーレント積分器と;コヒーレント積分器に接続され、かつ積分出力の大きさを検出して、複数の積分大きさを生成する大きさ決定器と;大きさ決定器に接続されて、複数の積分大きさを記憶する大きさ対遅延メモリと;大きさ対遅延メモリに接続されて、最大積分大きさを決定することができる最大積分大きさ決定器と;を備え、最大信号大きさの遅延期間が時間オフセットである。
【0025】
本発明の以上のおよびその他の特徴および利点は、以下の本発明の好ましい実施形態を添付図面と組み合わせて説明することにより、さらに深く理解される。
【図面の簡単な説明】
【0026】
【図1】GPSデータワードを示す。
【図2A】GPSデータワードのデータセグメント捕捉に使用する1秒の捕捉時間枠の使用を示す。
【図2B】GPSデータワードのデータセグメント捕捉に使用する1秒の捕捉時間枠の使用を示す。
【図3】本発明の方法の第1実施形態の流れ図を示す。
【図4】本発明の方法の第2実施形態の流れ図を示す。
【図5】本発明の方法の第3実施形態の流れ図を示す。
【図6】本発明の方法の第4実施形態の流れ図を示す。
【図7】GPSハンドセットで時間を決定する装置の第1実施形態のブロック図を示す。
【図8】信号AおよびBを相関させて出力信号Cを生成する方法を示す。
【図9】最大積分大きさが予測されたデータパターンの開始を指示する方法を示す。
【図10】信号IF捕捉メモリを使用しない装置の第2実施形態のブロック図を示す。
【発明を実施するための形態】
【0027】
(発明の詳細な説明)
非同期GPSハンドセットで時刻を決定する低コストの方法を、外部受信機または独立した計時装置での通信リンクおよびデータ転送を必要とせずに実行する。GPS衛星信号の予測可能な構造が、ハンドセットでの時刻決定を補助する。
【0028】
50BPSデータパターンまたはデータシーケンスが精密に分かり、時間の関数として精密に計算することができる(すなわち確定的)衛星同報通信データ(それぞれが6秒毎に反復する)は少なくとも3つのセグメントがある。これらの既知で予測可能なデータシーケンスまたはデータパターンを、複数のデータビットにわたって相関し、使用して、50BPSデータメッセージの個々のビットを復調するにはGPS信号が弱すぎる場合でも、精密な時刻を決定することができる。
【0029】
図1は、各GPS衛星が6秒毎に伝送するGPSデータワード100を示す。GPSデータワード100は、プリアンブル102、HOWワード105、およびサブフレームID106を含む。プリアンブル102は、各衛星で同じである所定の8ビット識別子を含み、同じパターンが6秒毎に反復する。また、以前のサブフレームからの直前の2ビットは常に同じ(00)であり、したがって衛星毎に常に合計10ビットが同じである。この文書ではこれ以降、「プリアンブル」は、直前サブフレームの最後の2ビット(00)と現在のサブフレームの冒頭にある8ビットのシーケンスを有する10ビットのシーケンスを含むものとする。プリアンブル102は、50BPSデータレートに基づいて各衛星が伝送するのに200ミリ秒かかる。HOWワード105は、次のサブフレームの第1ビットの週時刻を規定する17ビット長のワードである。サブフレームID106は、5個の可能なサブフレームそれぞれの内容を規定する3ビットのフィールドである。HOWワード105は伝送に340ミリ秒かかり、サブフレームID106は伝送に60ミリ秒かかる。
【0030】
その結果、10ビットのプリアンブル102は常に同じかつ既知であり、17ビットのHOWワード105および3ビットのサブフレームID106は、時刻の関数として予測可能である。新しいHOWワード105およびサブフレームID106は、6秒の間隔でメッセージに現れるので、ハンドセットでローカル時間を3秒以内まで分かれば、サブフレーム毎に17ビットのHOWワード105および3ビットのサブフレームID106の精密なパターンが分かる。ハンドセットのローカル時間を3秒以内に維持することは、既にどのディジタルハンドセットの部品にもなっている低コストで低出力の実時間クロックの機能内で、容易に実行される。
【0031】
50BPSメッセージの各ビットは、1.023MHzで伝送される1023ビットスプレッディングゴールドコードとコヒーレントで、これ自体も精密な衛星クロックに対してコヒーレントである。ゴールドコードはデータビット毎に20回反復し、各ゴールドコードビットの20の発生を復号するのに約20ミリ秒の期間を必要とする。
【0032】
50BPSメッセージ全体が衛星クロックと同期しているので、50BPSメッセージの各ビットを衛星から伝送する時間は精密に制御されると共に既知であり、精密な時刻を指示するのに使用することができる。前述したように、GPS地上制御セグメントは、各衛星の精密なクロックを数ナノ秒の正確さまで維持する(すなわち操作する)。その結果、プリアンブル102、HOWワード105、およびサブフレームID106の衛星からの伝送時間が精密に分かる。これらの既知または予測可能なデータビットパターンの受信時間を同期させると、信号の飛行時間(衛星と受信機間の伝搬遅延)および衛星クロック誤差を予測されるビットの受信時刻に加算することにより、GPS衛星からGPS受信機へと精密な絶対ローカル時間を伝送することができる。伝搬遅延および衛星クロック誤差は、衛星の同報通信人工衛星軌道暦およびクロック補正データを知ることにより受信機で計算可能であり、距離測定値から位置を計算するために、これらのデータも必要である。
【0033】
GPSデータワード100の到着時刻を使用して、GPSハンドセット内で自由に動作する局所クロックを校正することができる。校正方法は、Kingの米国特許第5,893,044号で教示され、これは引用により本明細書に組み込まれる。プリアンブル102および/またはHOWワード105および/またはサブフレームID106の到着時間(TOA)は、飛行中の衛星距離の測定時間の測定に使用するか、任意選択でメモリへの捕捉時間の測定に使用することができる。GPS信号の捕捉および相関のオンザフライ(転送時)測定は、GPS信号が強力である場合に使用することができ、GPS信号の捕捉および相関のメモリ方法は、信号が弱いか不確実である場合に使用することができる。
【0034】
メモリを使用する場合、メモリは、いずれか1つまたは全てのデータセグメントを含むのに必要なメモリより大きいことが好ましい。捕捉時間は、本発明の技術により、またはKingの米国特許第5,893,044号によって教示された技術により、またはネットワークからハンドセットに送信されたパルスまたはメッセージなど、他の粗い時間基準を使用することにより、周期的に再校正した自由作動の局所実時間クロックで制御することが好ましい。重要なのは、捕捉間隔開始時間が、1つのサブフレームデータパターンの開始を他と区別することができるのに十分な正確さ、またはせいせい3秒の誤差であることである。データセグメントをメモリ(予備相関のためのIFメモリまたは相関後メモリ)に捕捉したら、データセグメントの精密な到着時間を直接測定し、したがってデータ捕捉時間を、したがってレンジ測定時間を確立することができる。これは、既存のGSM(登録商標)セルラー装置のハードウェアを広範に改造したり、既存の通信ネットワークに追加の構成要素を追加したり、特殊なネットワークメッセージを送信したりする必要なく実行することができる。
【0035】
GPS受信機またはハンドセットは独自の内部クロックを有することができる。しかし、この内部クロックは、GPS信号データの到着時間を正確に追跡するのに必要な正確さを有しなくてもよい。代わりに、内部クロックは、GPSデータメッセージ100の到着時間を抽出し、測定した到着時間を使用して内部クロックを周期的に再校正することにより、周期的に再校正することができる。最悪のケースでは、GPSハンドセットの局所実時間クロックが、約50PPMの誤差を有する32kHzの発振器を使用できることが予想され、1日に約2回の再校正が必要となる(1秒の正確さドリフト)。
【0036】
言うまでもなく、ハンドセットの局所実時間クロックが変動するにつれ、GPSデータメッセージ100の測定された到着時間は変動するが、局所実時間クロック(この変化時間レートもGPSによって校正することができる)の変動が比較的少ないので、測定した到着時間を使用して、局所実時間クロックの再校正に有用なオフセットを決定することができる。例えば、図1では、以前のサブフレームおよび現在のサブフレームを示す縦線は、GPSハンドセットがGPSデータメッセージ100の開始を予測する場所を示すことができる。したがって、実際の開始時間とGPSハンドセットが開始を予測する時間との差を測定すると、GPSハンドセットのクロック時間および変化時間レートの再校正に使用できる時間オフセットが得られる。
【0037】
局所実時間クロックが校正されていない場合は、探索プロセスを使用してセグメントをサンプリングし、既知のデータパターンまたはシーケンスに対してこれを検査し、次に検査間隔を別のセグメント長にスライドさせて、所望の既知のデータパターンまたはシーケンスが発見されるまで反復する。
【0038】
図2A〜図2Bは、データセグメントを捕捉するための1秒の捕捉時間枠200の使用を示す。入りGPS信号は、この実施形態では1秒の期間、捕捉される。所望に応じて他の捕捉時間枠を使用してもよい。図2Aでは、(クロックドリフトのために)GPSハンドセットの予測開始時間より前にプリアンブル102が到着する。しかし、捕捉時間枠200のサイズのため、プリアンブル102全体が捕捉され、記憶される。プリアンブルの予測される開始時間の前および後のGPSデータが捕捉されるように1秒の捕捉時間枠が好ましい。したがって、捕捉されたデータを検査して、いつプリアンブルが開始したか正確に求めることができる。
【0039】
図2Bでは、プリアンブル102が予測開始時間より後に到着する。1秒の捕捉時間枠200を使用することにより、局所ハンドセットクロックは、多数のビットをオフしてもよく、それでもプリアンブル102全体をなお捕捉することができる。
【0040】
図3は、GPSハンドセットの時刻を決定する方法の第1実施形態の流れ図300を示す。ステップ304で、GPSデータを所定の期間だけ捕捉する。好ましい実施形態では、GPSデータは、図2Aおよび図2Bで示すように、約1秒間捕捉されるが、他の期間を使用してもよい。開始時間および捕捉事象の継続時間は、局所実時間クロックによって制御される。局所実時間クロックは予め(本明細書で説明する方法、または従来のGPS信号処理技術によって)校正され、ドリフトしてもよい。
【0041】
局所実時間クロックの正確さは、例えば、ハンドセット基準発振器などの駆動発振器の安定性に基づいて決まる。GSM(登録商標)およびCDMAハンドセットでは、ハンドセット基準発振器は通常、約0.05PPMの安定性を有する(すなわち、発振器は100,000,000回振動する毎に約±5回変動する)。局所実時間クロックは、単純な32KHzの自由作動発振器で駆動してもよい。
【0042】
ステップ308では、確定的特徴または所定の特徴(例えば、プリアンブル、HOWワード、サブフレームIDのコードレプリカなど)を有する予測データパターンを捕捉データに配置する。好ましい実施形態では、これは図1に示すプリアンブル102である。しかし、HOWワード105のように、確定的特徴または所定の特徴を有する他の予測データパターンを使用してもよい。
【0043】
ステップ311では、捕捉開始時間から予測されたデータパターンまたはデータシーケンスの到着時間までの時間オフセットを決定する。ステップ315では、衛星から受信機への信号の伝搬遅延および衛星オフセットクロック補正を適用し、精密なローカル時間の測定値を生成する。この時間オフセットを使用して、GPSハンドセットのクロックを再校正し、さらに衛星レンジ測定の時間スタンピングのベースにすることができる。
【0044】
図4は、GPSハンドセットで時間を決定する方法の第2実施形態の流れ図400を示す。流れ図400は、進行中に方法を実行する点のみが、第1の実施形態の流れ図300と異なる。したがって、ステップ404では、ステップ304のようにGPSデータをただ捕捉するのではなく、方法は相関後コヒーレントGPSデータを捕捉する。ステップ408はステップ308と等しく、ステップ411はステップ311と等しい。
【0045】
流れ図300または流れ図400のいずれかを使用してもよいことを理解されたい。実時間オンザフライ方法が好ましいが、代わりにGPS信号をメモリに記憶してから、処理してもよい。メモリは一般に、受信機が相関ロックを喪失し、したがって信号の受信時に実時間でそれをもはや相関できない場合に使用する。これは、信号受信を改善または維持したり、受信信号の強度を改善したり、電力消費量を削減したり、計算負荷を長時間分配したりするために実行することができる。
【0046】
図5は、GPSハンドセットで時間を決定する方法の第3実施形態の流れ図500を示す。ステップ501では、受信したGPSメッセージを中間周波数に逓減する。これは当該技術分野で一般に知られ、データ処理および取扱いをさらに容易にするために実行される。
【0047】
ステップ504では、中間周波数をサンプリングし、複数のディジタルサンプルを取得する。サンプリングは、通常、例えば、1秒などの所定の期間にわたって実行され、その結果、好ましい実施形態では200のサンプルが生成される。
【0048】
ステップ507では、ディジタルIFサンプルを記憶する。好ましい実施形態では、これは、例えば、ランダムアクセスメモリなどの一般的メモリに記憶される。しかし、ディジタルIFサンプルは任意のタイプのディジタル記憶装置に記憶することができる。
【0049】
ステップ510では、データを受信した可視衛星毎にコード位相を決定する。ステップ512では、各可視衛星で受信したデータで、ドップラー(または周波数)シフトを決定する。GPSシステムは、地球の周囲の軌道に分布した24の衛星を使用し、一般に、少なくとも4つの衛星が、空の見通しがよい状態で地上の任意の点から見える。
【0050】
ステップ517では、処理のために最も強い信号を選択する。方法は、GPS信号の受信が比較的不良である期間中に正確な時間を決定するよう設計されるので、最強の信号を選択すると、最も確実であり、成功の可能性も最大になる。時間決定に必要な最小数の信号を処理するだけで計算時間、およびその結果としての電力消費量が減少され、その信号は1つの衛星の信号である。言うまでもなく、正確な時間を決定するのに、最強の信号が絶対的に必要なわけではない。追加的に(しかし次善的に)、受信機で複数の信号を処理して、時間を決定することができる。
【0051】
ステップ522では、相関後コヒーレント信号の同相特徴を測定し、記憶する。ステップ527では、相関後コヒーレント信号の直交特徴を測定し、記憶する。ステップ522および527は同時に実行することが好ましい。
【0052】
ステップ531では、ステップ522および527で決定した同相および直交特徴を、予測されるデータパターンとコヒーレントに相関させる。好ましい実施形態では、これはプリアンブル102、HOWワード105および/またはサブフレームID106である。実際には、ステップ531は受信信号の同相および直交特徴を予測されるデータパターンと比較して、受信データのシーケンスにおいて予測されるデータパターンがいつ開始するか決定する。
【0053】
ステップ534では、相関最大値から時間オフセットを決定する。ステップ531の相関はピーク(図9に見ることができる)を生成し、このピークは最大相関点、すなわち入りデータが予測されるデータパターンと一致する点である。したがって、データ捕捉開始からピークまでの時間が、予測されるデータパターンの開始が生じる時間オフセットを与える。
【0054】
ステップ538では、ステップ534で決定した時間オフセット、選択された衛星のコード位相および位置、衛星に対応するクロック補正(任意のGPS受信機の標準)、特定のGPSデータセグメントの既知の到着時間(プリアンブル102、HOWワード105および/またはサブフレームID106)、およびハンドセットの地理的位置から捕捉時間を決定する。ハンドセットの位置は、初期推測からの反復によって計算することができ、初期推測は、例えば、最寄りのセルラー基地局の位置である(各セルラー基地局は既知の緯度と経度を有する)。このデータは、時間オフセットを決定するのに十分である。次に、時間オフセットを使用してハンドセットの実時間クロックを再校正し、GPS衛星システムとの時間同期を維持することができる。
【0055】
図6は、GPSハンドセットで時間を決定する方法の第4実施形態の流れ図600を示す。流れ図600は、ステップ607で流れ図600がGPSサンプルを各可視衛星の疑似ランダムノイズ(PRN)コード(すなわち各衛星の一意の識別子で、ゴールドコードとしても知られる)および各可視衛星のドップラー特徴と非コヒーレントに相関させる点で、第3実施形態の流れ図500と異なる。図6に示す他のステップは、図5の対応するステップと同じである。図4の方法と同様、図6の方法はオンザフライの時間オフセット決定であり、ディジタルIFメモリを必要としない。
【0056】
流れ図500または流れ図600のいずれを使用してもよいことを理解されたい。実時間のオンザフライ方法が好ましいが、代替的にGPS信号をメモリに記憶してから、処理してもよい。メモリは一般に、受信機が相関ロックを喪失し、したがって信号の受信時に実時間でそれをもはや相関できない場合に使用する。これは、信号受信を改善または維持したり、受信信号の強度を改善したり、電力消費量を削減したり、長時間にわたって処理を延長したりするために実行することができる。
【0057】
図7は、GPSハンドセットで時間を決定する装置700の第1実施形態のブロック図を示す。装置700は、アンテナ704、GPSダウンコンバータ709、アナログ−ディジタル変換器(ADC)711、相関前ディジタルIFスイッチ713、局所実時間クロック715、ディジタルIFメモリ721、取得補助データ724、非コヒーレントGPS相関器726、コヒーレントGPS相関器729、相関後コヒーレントメモリ記憶スイッチ732、サンプルメモリ735、クリーンアップミキサ738、相関器742、予め記憶された予測データパターン744、時間拡張器748、時間遅延750、コヒーレント積分器754、大きさ決定器757、大きさ対遅延メモリ762、および最大積分大きさ決定器766を含む。
【0058】
アンテナ704は、GPS信号を受信し、これをGPSダウンコンバータ709に送る。GPSダウンコンバータ709はGPSデータ信号を中間周波数(IF)に変換し、これをADC711に送る。ADC711はIFデータをディジタルIFデータに変換し、ディジタルIFデータをディジタルIFスイッチ713に送る。ディジタルIFスイッチ713は、局所実時間クロック715の制御下で、ディジタルIFデータを周期的にサンプリングし、周期的サンプル(相関前)はディジタルIFメモリ721に記憶される。
【0059】
標的ビットがNミリ秒長のメモリに適切に捕捉されるのを保証するため、実時間クロック715の正確さは(N−M)/2ミリ秒以内に維持しなければならない。好ましい実施形態ではNが1秒、Mが200ミリ秒であるとすると、クロックは約±200ミリ秒もドリフトすることができ、それでも標的データシーケンスの捕捉に有用である。
【0060】
しかしながら、局所実時間クロック715は周期的に再校正しなければならない。再校正は、幾つかの方法で実施することができる。例えば、1)各GPS位置決め要求で本明細書に記載した方法を適用するか、2)実時間クロック715が所定の許容不能な量ドリフトするよう予想される場合は、自動的に再校正するか、3)ハンドセットから空の見晴らしがよい場合は、直接GPS信号から従来通のGPSが時間を抽出することができるか、4)ハンドセットが充電などの遠隔動力を有している場合は、従来のGPS信号検出器から時間を取得し、可能な場合はGPS信号から時間を直接取得するか、5)カーキットに内蔵された埋め込み式GPSセンサから、または、例えば、ブルートゥースなどの無線インタフェースを介して車両自体から、カーキットからハンドセットへ時間を転送するか、6)非同期ネットワークを通して粗い時間を伝送する。
【0061】
非コヒーレントGPS相関器726は、受信してディジタルIFメモリ721に記憶されるGPS衛星信号のコード位相特徴、ドップラー特徴、および信号強度を決定する。ハードウェアはこのポイントまで複数のGPS衛星信号を受信することができ、ディジタルIFメモリ721に記憶されたディジタルIFデータは、幾つかの衛星信号のデータを含むことを理解されたい。前述したように、任意の時刻にGPSハンドセットの視野には最少でも4つのGPS衛星があり、場合によってはそれ以上ある。したがって、少なくとも4つのGPSデータ信号が存在する。
【0062】
非コヒーレントGPS相関器726は、取得補助データ724からの情報も受信し、これは既知および予測される衛星位置などの衛星の配置を含む。この取得補助データ724によって、非コヒーレントGPS相関器726は衛星信号を区別し、検出可能な各衛星信号のコード位相(0から1ミリ秒の時間オフセット)およびドップラー周波数(±4KHz)を決定することができる。
【0063】
非コヒーレントGPS相関器726は、時間領域の相関器でよく、相関器は連続する出力を1ミリ秒までコヒーレントに合計する。このような相関器の例が、Kennedyの米国特許第5,148,452で示され、これは引用により本明細書に組み込まれる。代替的に、非コヒーレントGPS相関器726は、Krasnerの米国特許第5,663,734号、またはMaその他の米国特許第4,998,111号で開示されているような周波数領域の相関器でもよく、それらは両方とも引用により本明細書に組み込まれる。非コヒーレント相関器は、50BPSデータパターンを知る必要がなく、従来のGPS信号処理技術が失敗する環境で、信号のコード位相およびドップラーシフトを抽出できることに留意することが重要である。また、非コヒーレントGPS相関器726は、専用のハードウェアで実装するか、プログラム可能なディジタル信号プロセッサにコード化したソフトウェアによって生成することができる。
【0064】
コヒーレントGPS相関器729は、同様にディジタルIFメモリ721に接続され、非コヒーレントGPS相関器726にも接続される。ディジタルIFメモリ721からのデータが(単チャネル)コヒーレントGPS相関器729に供給され、コヒーレントGPS相関器729は、所定のコード位相およびドップラーで信号の1ミリ秒同相および直交測定を実行する。コヒーレントGPS相関器729は単チャネル相関器であり、非コヒーレントGPS相関器726から受信した最強GPSデータ信号の同相および直交測定値を生成する。この時点で、最強のGPS信号は選択されており、時間決定の取得の信頼性および可能性を向上させるために、この時点から使用される。非コヒーレントGPS相関器726およびコヒーレント相関器729は、2つの異なるモードで使用される同じ1つの相関器でもよいことに留意することが重要である。
【0065】
非コヒーレントGPS相関器726と同様、コヒーレントGPS相関器729も専用のハードウェアで実装するか、プログラム可能なディジタル信号プロセッサにコード化したソフトウェアによって生成することができる。
【0066】
コヒーレントGPS相関器729には、相関後メモリ記憶スイッチ732が接続され、これはサンプルメモリ735に接続されて、サンプルメモリ735に記憶される同相および直交測定サンプルワードを生成する。メモリ記憶スイッチ732は、好ましい実施形態では1ミリ秒のサンプルを採取し、ディジタルIFメモリ721に記憶されたNミリ秒のデータに対応する同相および直交測定値のNワードの複素数データを生成する。1ミリ秒のサンプルは拡散が防止されており(GPS信号は拡散スペクトル信号である)、ほぼゼロのドップラーであり、したがってサンプルワードに残っている唯一の信号は50BPSデータパターン(およびノイズ)である。
【0067】
サンプルメモリ735にはクリーンアップミキサ738が接続され、これは記憶された同相および直交測定値から残りのドップラー特徴を除去する(サンプルメモリ735は、サンプルから全て、またはほとんど全てのドップラーを除去した同相および直交測定値を含む)。これは、相関後サンプルがメモリに既に記憶され、再生することができるので、複数の技術を使用し、反復的な方法で実施することができる。例えば、1つの方法は、大きさ対遅延メモリ762のピーク信号を最大にするドップラーワイプオフ周波数を見出すようにサンプルメモリ735に記憶された完全なサンプルセットから複数の相関で残りのドップラーワイプオフ周波数の反復的ステッピングを実行する。これを最善に実行するため、コヒーレント相関器729のドップラー信号の大部分をワイプオフするのに使用する推定ドップラー周波数は、サンプルメモリ735に充填する間、一定に維持するとよい。このようにして、一定の残りのドップラーワイプオフ周波数を使用することができるか、あるいは動力学を受ける受信機の場合は、チャープのある(一定でなく、一定速度の周波数変化で変化する)残りのドップラーワイプオフ周波数も、反復的試行の一部として試みることができる。
【0068】
相関器742はクリーンアップミキサ738および予想データパターン744に接続される。相関器742は、予想データパターン744に同相および直交測定値を相関させる。
【0069】
好ましい実施形態では、予想データパターン744はGPSデータメッセージ100のプリアンブル102、HOWワード105および/またはサブフレームID106である。予想データパターン744は時間拡張器748に接続され、これは各ビットの継続時間を1ミリ秒から20ミリ秒に拡張し、時間拡張器748はさらに遅延器750に接続される。遅延器750は相関器742に接続される。したがって、予想される50BPSデータパターンは、サンプルメモリ735に記憶されたサンプルワードの長さに一致するため、200ミリ秒の長さのデータパターンに変換される(プリアンブル102の場合)。相関器742は、受信して記憶したデータをこの予測データパターンとコヒーレントに相関させ、データパターンに相関がある場合は最高値を生成する。これが図8に図示され、ここで信号AおよびBは相関して、出力信号Cを生成する。したがって、信号Cは信号AおよびBが同じ値を有する場合はディジタルの1を含み、信号AとBが異なる場合はディジタルのゼロを含む。これは、ハードウェアの排他的ORゲート、またはこのメモリに記憶されたマイクロプロセッサのアルゴリズムによって実行することができる。
【0070】
コヒーレント相関器754は相関器742に接続され、相関出力を積分して積分出力を生成する。N−M遅延コヒーレント積分を実行する作業の多くは、マイクロプロセッサまたは専用ハードウェアに記憶された再帰的アルゴリズムにより実行することができるので、必要な作業数が大幅に減少することに留意されたい。また、乗算演算は全て+1または−1で実行されるので、計算が大幅に単純になる。
【0071】
コヒーレント相関器754には大きさ決定器757が接続され、積分結果の大きさを検出する。大きさ決定器757からの複数の積分大きさが、大きさ対遅延メモリ762に記憶される。好ましい実施形態では、N−M大きさ値の合計が生成され、大きさ対遅延メモリ762に記憶される。パラメータNは、サンプルメモリ735のワードのサイズであり、NはディジタルIFメモリ721に捕捉されたデータのミリ秒数を反映する。ディジタルIFメモリが1秒のデータ(すなわち、1000個のサンプル)を含む場合、パラメータNは1,000である。パラメータMは既知のデータパターンの長さである。プリアンブル102を捕捉する場合、パラメータMは200ミリ秒の長さである。同様に、HOWワード105では、パラメータMは340ミリ秒の長さである。積分大きさの数は、ADC711の後に捕捉された元のIFデータ内のサンプル数に対応する。
【0072】
次に、最大積分大きさ決定器766が大きさ対遅延メモリ762に記憶されたデータを使用して、最大積分結果が達成されるポイントを決定する。これは図9に図示され、ここで最大積分大きさは予測データパターンの冒頭を指示する。信号捕捉開始時(時間ゼロポイント)と最大積分大きさ測定時間(ピーク)との間の時間オフセットが、求める時間オフセットである。次に、時間オフセットを(選択された衛星のコード位相および位置、および対応する衛星クロック補正とともに)使用して、図5のステップ538および図6のステップ638との関連で上述したように、実際の(ローカル)時間を決定し、ハンドセットの実時間クロックを再校正することができる。
【0073】
同様の方法で、図10に示すようなGPSハンドセットで時間を決定する装置の第2実施形態を使用する。ここでは図7に示したようなディジタルIFサンプルメモリ721およびIFスイッチ713は削除されている。図10を参照すると、ローカル実時間クロック1015が、サンプルメモリ1035に記憶された相関後同相および直交サンプルの捕捉時間スイッチ1032を直接制御する。残りの装置は、図7に関して述べたものと同じである。したがって、装置1000は、時間オフセットを決定するため、GPS信号を進行中に処理するよう設計される。
【0074】
要素732〜766および要素1032〜1066は、全て、制御マイクロプロセッサ上で実行するソフトウェアアルゴリズムで好ましく実行でき、したがって追加のハードウェアを必要としない。
【0075】
好ましい実施形態について以上で詳細に説明してきたが、本発明は記載されたような特定の実施形態に制限されるものではない。本発明の概念から逸脱することなく、当業者には本明細書で記載した特定の実施形態を多様に使用し、改造し、逸脱できることが明白である。
【特許請求の範囲】
【請求項1】
GPS受信機が時間を決定する決定方法であって、
所定の期間に亘って、GPSメッセージからGPSデータを捕捉するステップ(304)と;
捕捉した前記GPSデータをデータシーケンスパターンに相関させることによって、前記データシーケンスパターンを、捕捉した前記GPSデータに配置するステップと(308);
前記所定の期間の開始時間と前記データシーケンスパターンの到着時間との間の時間オフセットを決定するステップ(311)と
を有し、
前記GPSメッセージは、GPS衛星からのメッセージであり、
前記決定するステップは、前記時間オフセットを補正することによって前記GPS衛星と前記GPS受信機との間の信号伝達時間を補償することを含み、
前記時間オフセットを補正することは、前記補正された時間オフセットを修正することによって、衛星クロックオフセット時間を補償することを含む、決定方法。
【請求項2】
前記時間オフセットは、前記GPS受信機のクロックを校正するために使用される、
請求項1記載の決定方法。
【請求項3】
前記データシーケンスパターンは、GPSメッセージプリアンブル(102)である、
請求項1記載の決定方法。
【請求項4】
前記データシーケンスパターンは、ハンドオーバワード(105)である、
請求項1記載の決定方法。
【請求項5】
前記データシーケンスパターンは、サブフレームID(106)である、
請求項1記載の決定方法。
【請求項6】
前記データシーケンスパターンは、GPSメッセージプリアンブル(102)と、ハンドオーバワード(105)と、サブフレームID(106)と、それらの組合せとから選択される、
請求項1記載の決定方法。
【請求項7】
前記所定の期間は、1秒である、
請求項1記載の決定方法。
【請求項8】
前記捕捉するステップは、
GPS信号を所定の中間周波数に逓減するステップと;
逓減された前記GPS信号をサンプリングすることによって、複数のサンプルを生成するステップと;
前記複数のサンプルをメモリに格納するステップと
を有する、
請求項1記載の決定方法。
【請求項9】
請求項1〜8のうちのいずれか1項に記載の決定方法を実行するように構成された装置。
【請求項1】
GPS受信機が時間を決定する決定方法であって、
所定の期間に亘って、GPSメッセージからGPSデータを捕捉するステップ(304)と;
捕捉した前記GPSデータをデータシーケンスパターンに相関させることによって、前記データシーケンスパターンを、捕捉した前記GPSデータに配置するステップと(308);
前記所定の期間の開始時間と前記データシーケンスパターンの到着時間との間の時間オフセットを決定するステップ(311)と
を有し、
前記GPSメッセージは、GPS衛星からのメッセージであり、
前記決定するステップは、前記時間オフセットを補正することによって前記GPS衛星と前記GPS受信機との間の信号伝達時間を補償することを含み、
前記時間オフセットを補正することは、前記補正された時間オフセットを修正することによって、衛星クロックオフセット時間を補償することを含む、決定方法。
【請求項2】
前記時間オフセットは、前記GPS受信機のクロックを校正するために使用される、
請求項1記載の決定方法。
【請求項3】
前記データシーケンスパターンは、GPSメッセージプリアンブル(102)である、
請求項1記載の決定方法。
【請求項4】
前記データシーケンスパターンは、ハンドオーバワード(105)である、
請求項1記載の決定方法。
【請求項5】
前記データシーケンスパターンは、サブフレームID(106)である、
請求項1記載の決定方法。
【請求項6】
前記データシーケンスパターンは、GPSメッセージプリアンブル(102)と、ハンドオーバワード(105)と、サブフレームID(106)と、それらの組合せとから選択される、
請求項1記載の決定方法。
【請求項7】
前記所定の期間は、1秒である、
請求項1記載の決定方法。
【請求項8】
前記捕捉するステップは、
GPS信号を所定の中間周波数に逓減するステップと;
逓減された前記GPS信号をサンプリングすることによって、複数のサンプルを生成するステップと;
前記複数のサンプルをメモリに格納するステップと
を有する、
請求項1記載の決定方法。
【請求項9】
請求項1〜8のうちのいずれか1項に記載の決定方法を実行するように構成された装置。
【図1】


【図2A】

【図2B】
【図3】
【図4】

【図5】
【図6】
【図7】

【図8】
【図9】
【図10】

【図2A】
【図2B】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−50461(P2013−50461A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2012−243604(P2012−243604)
【出願日】平成24年11月5日(2012.11.5)
【分割の表示】特願2001−573091(P2001−573091)の分割
【原出願日】平成13年3月29日(2001.3.29)
【出願人】(510284071)モトローラ モビリティ エルエルシー (50)
【氏名又は名称原語表記】MOTOROLA MOBILITY LLC
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成24年11月5日(2012.11.5)
【分割の表示】特願2001−573091(P2001−573091)の分割
【原出願日】平成13年3月29日(2001.3.29)
【出願人】(510284071)モトローラ モビリティ エルエルシー (50)
【氏名又は名称原語表記】MOTOROLA MOBILITY LLC
【Fターム(参考)】
[ Back to top ]