
GPS受信機を備えた地震測定システム
3次元地震データを解析するためのシステムは、複数のデジタイザ装置(7)(各々が一式の地中聴音器(8)を備えている)、データ記録及びコントロールセンター(12)、上空視野が実質的に制限されていない関連するアンテナ(5)を有する基地GPS受信機、及び基地GPS受信機により提供される追跡支援情報を使用して、GPS衛星(9)信号を取得して追跡する、それぞれのデジタイザ装置(7)に設けられた低電力のスレーブGPS受信機(6)を備える。スレーブGPS受信機(6)は、追跡支援情報を使用して樹葉(11)による天蓋状の覆いの存在などのサイトにおける条件のために受信機で比較的弱くなっている場合があるGPS衛星信号を取得して追跡する。システムは、長時間にわたってスレーブGPS受信機(6)によって提供された距離情報を処理する。このようにして、スレーブGPS受信機(6)が、3または4つだけの比較的短い時間間隔にわたって、その長時間の間様々な上空の位置にある2つ以上の衛星(9)の組からのデータを観測して収集することしかできない場合でも、それぞれのスレーブGPS受信機(6)、したがって、デジタイザ装置の正確な位置を計算することができる。スレーブGPS受信機(6)は、次に、デジタイザ装置(7)のために、GPSコードに基づいており、かつ、システム全体で同期化しているタイミング信号を局所的に生成する。所与のスレーブGPS受信機(6)が、所与の時刻において、いずれのGPS衛星信号も追跡できない場合には、近くのスレーブGPS受信機(6)が、地中聴音器のデータ収集動作のために必要なタイミング情報を供給する。

【発明の詳細な説明】
【技術分野】
【0001】
「関連出願への相互参照」
本出願は、Patrick C. Fentonによって2003年7月17日に出願された、「A SEISMIC MEASURING SYSTEM INCLUDING GPS RECEIVERS」と題する米国仮特許出願第60/488,124の利益を主張するものである。尚、この仮特許出願は、参照により本明細書に組み込まれるものとする。
【0002】
本発明は、一般に、地震データ収集システムに関連し、特に、3次元地震データを収集して解析するためのシステムに関する。
【背景技術】
【0003】
3次元地震データを解析するためにシステムは、地震測定値に対応する信号を生成するデジタイザユニット(DU)に取り付けられて、これらのDUと通信する一式の地中聴音器から地震測定値を収集する。DUは、対象とするサイト(場所)をまたぐケーブルに沿った選択された位置に配置され、一式の地中聴音器から測定値を取得して、ケーブルを介してデータ記録及び制御センターに、対応する信号を送信する。これらのデータは、例えば、そのサイトに油脈が存在する可能性を判定するために使用される。典型的なサイトには、数千のDUを設けることができる(各々のDUが、関連する一式の地中聴音器を備える)。
【発明の開示】
【発明が解決しようとする課題】
【0004】
測定装置をセットアップし動作させることは、時間がかかりかつ複雑な作業である。DUの位置は、厳格な垂直及び水平方向における厳格な精度の限度内で既知でなければならず、一般に、それぞれのDUの位置は、光学測量技術である、GPS RTK「バックパック(back-pack)システムまたはGPS/INSシステムを用いて個々に決定される。さらに、サイトの見通しがよくない、すなわち、選択されたDUの位置にある植物の葉を取り除くことはできない場合がある。DUの位置を決定するプロセスは、このように、見通し線がさえぎられているときには、さらに、時間がかかりかつ複雑なものとなる。DUによって取得された地中聴音器の測定値を、厳格なタイミング制限内で同期化しなければならない。従来の既知のシステムでは、タイミング信号は、ケーブルを介して送られ、測定値はこのタイミング信号に応答して種々のDUで取得される。したがって、関連するタイミング信号の遅延を回避するために、それぞれのケーブの長さは制限されている。この結果、所与の時刻に試験することが可能なエリアもまた、ケーブルの長さによって制限される。
【0005】
必要とされているのは、セットアップに要する時間をより少なくでき、かつより大きなエリアに対して正確に動作することが可能なシステムである。
【課題を解決するための手段】
【0006】
「発明の概要」
3次元の地震データを解析するためのシステムは、DU、地中聴音器、データ記録及びコントロールセンターに加えて、基地GPS受信機(ベースGPS受信機)及び実質的に上空の視界が制限されていない関連するアンテナと、それぞれのDUの位置にある低電力スレーブGPS受信機とを備えている。低電力GPS受信機は、基地GPS受信機によって提供される追跡支援情報を使用して、GPS衛星信号を取得して追跡する。スレーブGPS受信機は、追跡支援情報を使用して、樹葉による天蓋状の覆いの存在などのサイトにおける条件のために受信機で比較的弱くなっている場合があるGPS衛星信号を取得して追跡することができる。さらに、後述するように、システムは、スレーブGPS受信機を動作させて、関連する距離情報を処理し、これによって、それぞれのスレーブGPS受信機の上空の視界が大幅に悪くなった場合でも、それぞれのDUの正確な位置が計算され、かつ、同期化されたタイミング情報が各DUに提供されるようにする。
【0007】
所与のDUの正確な位置を決定するために、関連するスレーブGPS受信機は、追跡支援情報を使用して、受信機の視界内にある衛星からGPS衛星信号を取得して追跡する。スレーブGPS受信機は、次に、関連する距離情報を生成して、この情報をデータ記録及びコントロールセンターに提供する。データ記録及びコントロールセンターは、適宜、数時間や数日といった長時間にわたって距離情報を収集する。このセンターは、次に、その情報をバッチ処理(一括処理)して、単一の計算された位置を生成する。長時間にわたって収集された情報を処理することによって、システムは、スレーブGPS受信機が、3または4の比較的短い時間間隔わたって、その長時間の期間中さまざまな上空の位置にある少なくとも2つの衛星からのデータを同時に観測して収集することが可能なかぎりは、地震測定に必要とされる厳格な垂直及び水平方向の許容誤差内でスレーブGPS受信機の位置を決定することができる。したがって、バッチ処理を行うことによって、GPS衛星信号を絶えず追跡する必要性、及び/または、それぞれの時間間隔にわたって同じ組の衛星からの信号を追跡する必要性がなくなる。
【0008】
データ記録及びコントロールセンターは、その後、それぞれのスレーブGPS受信機に計算された正確な位置を提供する。スレーブGPS受信機は、次に、この位置情報と、基地GPS受信機によって提供された追跡支援情報を使用して、地中聴音器からの地震データの集合を操作する際に使用する、同期化されたタイミング信号を生成する。タイミング信号は、GPS衛星信号中のコードに関連付けられた1パルス/秒のストローブと、関連するRS−232タイムタグ(時間タグまたは時刻タグ)データを有する。タイミング信号は、複数のスレーブGPS受信機が、個別に、地中聴音器のデータ収集動作中に少なくとも1つのGPS衛星からの信号を追跡し続けている限りは、システム全体において同期化されたままである。データ収集動作中に追跡を行っているスレーブGPS受信機は、同期化されたタイミング信号を、接続ケーブルを介して、近くの追跡を行っていないスレーブGPS受信機に提供する。したがって、ケーブル長に対する制限は、本質的に、それぞれのスレーブGPS受信機間に存在する。これは、それぞれのDUとコントロールセンターの間にケーブル長に対する制限が課されなければならない既知の従来システムとは対照的である。
【0009】
したがって、システムは、単一の基地GPS受信機によって提供された追跡支援情報により強化された取得及び追跡能力を有する比較的廉価なスレーブGPS受信機を使用して、それぞれのDUに対する正確な位置情報(または測位情報)と、地中聴音器からのデータの集合に対する同期化されたタイミング信号を提供する。さらに、システムは、正確な位置情報(または測位情報)と同期化されたタイミング信号の生成を、従来の方式で動作するGPS受信機が、たとえば、それぞれのGPS受信機におけるGPS衛星信号の受信を妨害する木の葉による遮りのために一般になしえなかった環境において行うことができる。
【0010】
以下、本発明を添付図面を参照して説明する。
【実施例】
【0011】
「例示的な実施形態の詳細な説明」
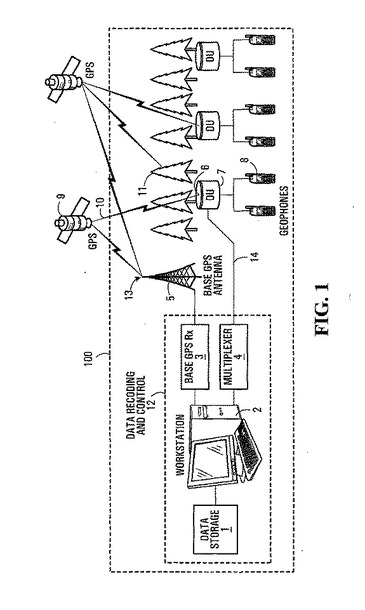
図1には、地震測定値を収集して分析するためのシステム100が示されている。システム100は、DU7を介してデータ記録及びコントロールセンター12に地震データを供給する複数の地中聴音器8を備える。DUは、対象とするサイト上の選択された位置に配置され、ケーブル14によってセンターに接続されている。センター12は、地中聴音器によって収集されたデータを処理し、及び、格納する1つ以上のワークステーション2とデータ記憶装置1を備える。さまざまなケーブル14(ケーブルの1つだけが図示されている)からの信号は、従来の方式で動作するマルチプレクサ4を介して1つ以上のワークステーション2に供給される。システムは一般に数千のDUを備え、各DUは、関連する地中聴音器(一式)を有する。
【0012】
データ記録及びコントロールセンター12は、さらに、見通しのきく上空の視界を有するように位置決めされた基地GPSアンテナ13を使用してさまざまなGPS衛星9からの信号を受信する、全地球測位システム(GPS)の基地受信機3を備える。図示されているように、高い塔5が、GPSアンテナ13に見通しのきく空の視界をもたらすために必要になる場合がある。比較的廉価な低電力(L1)受信機とすることができるスレーブGPS受信機6が、それぞれのDU7に配置される。より詳細に後述するように、スレーブGPS受信機6は、データ記録及びコントロールセンター12に距離情報を提供し、かつ、DU7に、同期化されたデータ収集タイミング信号を提供する。また、図示されているように、いくつかのまたは全てのスレーブGPS受信機6は、さまざまな木11の下またはそれらの近くに配置され、このため、任意の所与の時間において、いくつかの上空の位置にあるGPS衛星9からの信号10が、さまざまなスレーブGPS受信機で利用できなくなったり、または、それらの受信機において弱められる可能性がある。
【0013】
基地GPS受信機3は、視野内の各GPS衛星からの信号10を取得して追跡し、さまざまな時刻に、関連する追跡支援情報をスレーブGPS受信機に提供する。基地GPS受信機は、追跡支援情報として、少なくとも、視野内の衛星のリスト、関連するドップラー周波数オフセット及びブロードキャストデータシンボル(broadcast data symbol)を提供する。スレーブGPS受信機は、比較的狭い帯域幅の追跡ループ(トラッキングループ)を用いて種々の衛星からの信号を取得して追跡するために、追跡支援情報を使用する。これにより、それぞれのスレーブGPS受信機は、これらの受信機のところで弱くなっているGPS衛星信号を利用することができるようになる。たとえば、スレーブGPS受信機は、従来の方式で動作している、すなわち、追跡支援情報なしで動作しているGPS受信機によって要求される信号より10〜15dB低い信号を取得して追跡することができる。
【0014】
各スレーブGPS受信機6は、所与の時刻にこの受信機が追跡することができる衛星信号に基づいて距離情報を生成し、その距離情報をデータ記録及びコントロールセンター12に提供する。距離情報には、追跡されている信号の各々についてのコード及びキャリアタイミング情報が含まれる。センターは、たとえば、数時間、数日または数週間といった長時間にわたって距離情報を収集し、次に、受信機の正確な緯度、経度及び高さを計算するために収集された情報をバッチ処理する。センターは、また、より詳細に後述するように、バッチ処理による位置計算において使用される情報が十分に信頼できるものであることを保証するために、収集された距離情報の品質を計算する。
【0015】
スレーブGPS受信機が、3また4の比較的短い時間間隔にわたって、上記長時間の時間中に異なる上空の位置にある少なくとも2つの衛星を同時に追跡する限りは、距離情報のバッチ処理は、地震測定に要求される許容誤差内でスレーブGPS受信機の位置を計算する。したがって、バッチ処理を行うことにより、スレーブGPS受信機が、複数の衛星からのGPS衛星信号を絶えず追跡すること、及び/または、同じ組のGPS衛星からの信号を追跡することを必要とすることなく、システムは、スレーブ受信機の正確な位置を計算することが可能となる。
【0016】
データ記録及びコントロールセンター12は、一定位置にある所与のスレーブGPS受信機から収集された距離データをバッチ処理して、単一の位置(すなわち、緯度、経度、及び高さ)、及び関連する位置共分散を計算する。バッチ処理は、30〜60メートル以内の精度であることが期待される地球上における位置の推定値を生成するために、収集された距離データに対する複数の段階を含み、その第1の段階は、全ての収集されたデータ、すなわち、全ての擬似距離(pseudorange)及びキャリア位相情報を使用する。上述したように、精度は、距離データの全体的品質によって悪影響を受ける。距離データは、長時間にわたって、すなわち、数時間、数日等にわたって、さまざまな時刻に受信機の視野にある衛星からの信号に基づいて生成される。一般的には、距離データは8〜24時間の期間にわたって収集されることが期待されている。植物の葉に起因して、または受信可能範囲が部分的であることによって、スレーブGPS受信機の上空の視野が制限されているために、受信機は、上記長時間のほとんどの期間にわたって視野内に同じ衛星の組を有しない可能性があり、及び/または、特定の時刻に視野内に2つ以上の衛星を有しない可能性がある。さらに、いくつかの衛星の信号は、植物の葉や近くになる他の障害物によって受信機に反射される信号による大きな多経路成分信号によって歪む可能性がある。
【0017】
データに対する次の段階として、データ記録及びコントロールセンターは、多経路干渉をより受けにくいキャリア位相測定値のみを使用して、計算された位置及び位置共分散を改善する。受信機は、第1の段階からの推定された位置及び位置共分散から開始し、計算集約的な手法で、推定された位置及び関連する位置共分散の更新値を決定するために、キャリアサイクルのアンビギティー(曖昧さ)を解消する。推定された位置及び関連する位置共分散は、コード時間(コードエポック:code epoch)毎に更新される。このコード時間において、2つ以上の衛星が受信機の視野内にあり、すなわち、このとき、二重差(double difference)を計算してキャリアサイクルのアンビギティーを解消することができる。第2の段階の終わりにおける位置予測値の精度は3〜6メートルの範囲内であることが期待されるが、誤差のほとんどが高さ成分によるものである。
【0018】
データに対する第3の段階では、キャリア位相測定値に基づいて、位置及び位置共分散を第2の段階からの最良の推定値に保持し、感知される動き(perceived movement)をサーチする。この場合、処理は、ほんのわずかな感知される動きまたはゼロの感知される動き(すなわち、感知される動きがない)に関連するデータをさらに処理するために選択を行う。処理は、この更なる処理で使用される種々のデータに選択的に重み付けを行うこともできる。
【0019】
より具体的には、第3の段階の処理は、一定位置に関して二重差キャリア位相測定値の残差を計算し、その残差が感知される動きを示すか否かを判定する。残差は、キャリア位相測定値において連続性がある時間にわたって、すなわち、捕捉の中断(またはロックの喪失:loss of lock)またはサイクルスリップがない期間にわたって累積される。処理は、残差の平方の和が正規化閾値より小さい場合に、及び、さらに、その平方の和の増加率が所定の閾値より小さい場合に、測定データが所与の時間にわたって有効であると判定する。これら両方の条件が満たされない場合には、処理は、サイクルスリップ間の時間全体にわたって、関連する一連のキャリア測定値が無効であることを示す(または、そのことを示すフラグを立てる)。処理は、また、有効とみなされているそれぞれの測定値に重みを割り当てることができる。したがって、処理は、いくつかの測定値の重み付けを下げて、相互に関連する多経路誤差、すなわち、非白色ノイズ誤差が、上記更なる処理に悪影響を与えるのを防止することができる。重み付けを下げることは、たとえば、特定のコード時間にわたる測定値のうちの少数の測定値、たとえば、4つの全ての測定値のうちの1つ、を使用するか、または、関連する計算においてより大きな標準偏差を使用するいった形態をとることができる。
【0020】
次に、処理は、第3の段階の結果に基づいて推定された位置を再計算する。したがって、システムは、計算値から、無効として示された測定値を除去して、残りの測定値に適切な重みを割り当て、新しい位置推定値及び関連する位置共分散を生成する。
【0021】
処理システムは、次に、位置及び位置共分散を新しい推定値に固定された状態に保持して、第3の段階、すなわち、関連する残差に基づいて測定値の有効性を判定し及びそれらの測定値について重み付けを行う処理ステップを繰り返す。このステップにおいて、システムは、新しい推定値に関してではなく、以前の推定された位置及び位置共分散に対して感知される動きを示した特定の測定値を良好な測定値であると認めることができる。次に、処理システムは、更新された重み付けと有効性の判定を用いて、次の推定された位置及び関連する位置共分散を決定し、こうした繰り返し(すなわち、新たな重み付け及び位置の次の推定値を決定すること)を、推定された高さが、それらの繰り返し間の所定の閾値よりも小さく変化するまで継続する。
【0022】
バッチ処理の動作については、本願と共通の譲受人に譲渡された「METHOD FOR POSITIONING USING GPS IN A RESTRICTIVE COVERAGE ENVIRONMMENT」と題する同時係属中の米国仮特許出願(出願番号は現時点で不明。代理人事件番号016437-0218R)により詳細に記載されている。尚、この仮特許出願は参照によりその全体を本明細書に組み込むものとする。
【0023】
システムによって実施されるバッチ処理は、既知のassisted GPS、すなわち、e911システムとも呼ばれるA-GPSシステムにおいて実施される処理とは大きく異なる。A-GPSシステムは、携帯電話内のGPS受信機が、3〜4つのGPS衛星からの信号を同時に高速に取得して追跡することに基づいて、本質的に、約100メートル以内で「瞬間的な」位置を決定することを可能にする。A-GPSシステムは、地震測定に必要とされる厳格な許容誤差を満足するように設計されておらず、また、そのような許容誤差を満たすものでもない。
【0024】
図1をさらに参照すると、データ記録及びコントロールセンター12が、必要とされる許容誤差内でそれぞれのスレーブGPS受信機6の位置を計算すると、センターはその位置を受信機に提供する。スレーブGPS受信機6は、次に、基地GPS受信機によって供給されたそれらの位置及び追跡支援情報を使用して、受信したGPS衛星信号内のコードのタイミングに対応する同期化された1パルス/秒のタイミング信号生成し、また、その1パルス/秒の信号に関連するRS-232時刻タグメッセージを生成する。DUは、タイミング信号(1パルス/秒及び時刻タグメッセージ)を使用して、地中聴音器からのデータの集合を操作する。所与のスレーブGPS受信機は、GPSコードに関連付けられたタイミング信号を生成するために任意の所与の時刻に単一のGPS衛星からの信号を追跡するだけでよく、したがって、DU及び関連するスレーブGPS受信機は、システム全体にわたってそれらのタイミング信号を同期した状態に維持することができなければならない。
【0025】
任意の所与の時刻に1つ以上のスレーブGPS受信機6が衛星信号の追跡に失敗した場合には、システムは、近くの追跡中のスレーブGPS受信機から、接続ケーブル14を介して、追跡中でないスレーブGPS受信機に、同期化されたタイミング信号を提供することにより、依然として地中聴音器からのデータを収集することができるであろう。スレーブGPS受信機はそれぞれ、ケーブルを介してタイミング情報を送信することができ、これによって、所与の受信機が、それ自体のタイミング情報または受信したタイミング情報を適宜使用することが可能となる。受信したタイミング信号は、そのタイミング信号を提供する受信機が、受信した信号にたよらなければならない受信機の約1キロメートル以内にある限り同期化されたままとなる。
【0026】
代替的なシステムの構成は、追跡支援情報の発生源としてDUに配置された受信機の1つを使用することができる。したがって、DUが、上空の視野が比較的見通しが良い場所に配置される場合には、設置者は、この受信機を構成して、追跡支援情報を種々のスレーブGPS受信機に供給するようにすることができる。したがって、この構成では、基地GPS受信機3、基地GPSアンテナ13、及び、高い塔5は必要でない場合がある。これに代えて、適宜、システムは、追跡支援情報の発生源としてDUに配置された2つ以上の受信機を使用することができ、この場合、選択された受信機は、上空の特定の領域におけるGPS衛星に対する追跡支援情報の発生源である。
【0027】
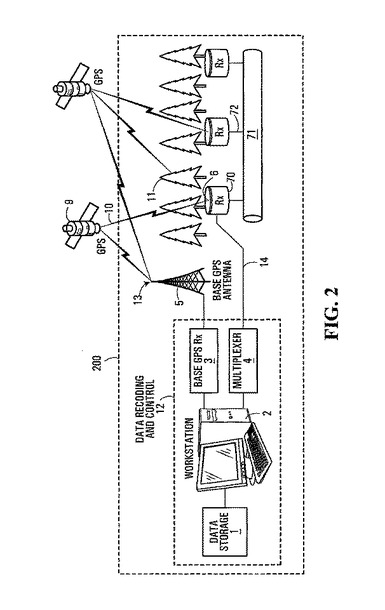
いずれの構成でも、システムを使用して、変形(歪みなど)の監視を実行することもできる。変形監視は、潜在的に不安定な地面に配置される場合がある橋、ダム、建物、パイプラインなどの、本質的に固定された対象とする地点の動きをチェックする。ここで、図2を参照すると、変形監視システム200は、追跡支援情報を提供する、上空への見通しのよい視野を有する1つ以上の基地GPS受信機3と、監視装置として機能する複数のスレーブGPS受信機6を備えている。スレーブGPS受信機は、地中に埋め込まれたパイプ71にポール72により堅く取り付けられている。信号受信機70は、GPS受信機6及びケーブル14に信号を提供するとともにそれらからの信号を受信する。データ記録及びコントロールセンター12は、それぞれの基地GPS受信機及びスレーブGPS受信機から距離情報を収集し、距離情報をバッチ処理して、パイプ71に沿ったそれぞれのスレーブGPS受信機の正確な位置を決定する。それぞれのスレーブ受信機は、1つまたは複数の基地GPS受信機によって提供される追跡支援を用いて、衛星信号を追跡し続け、距離情報をデータ記録及びコントロールセンターに提供する。センターは、次に、変形を示す、それぞれのスレーブGPS受信機の位置の変化の有無を決定する。
【0028】
変形監視システム内の信号受信機70は、また、パイプ71に取り付けられている(不図示の)歪み計または傾斜計(tilt meter)などの副次的な測定装置からの他のタイプの測定データをデータ記録及びコントロールセンター12に提供することができる。このタイプのデータについては、データ記録及びコントロールセンターは、ケーブル14を介して、地震などの時刻タグ移動「事象」にタイミング信号を提供することができる。これらのまたは他の副次的な装置によってなされる測定に対して、システムが、ケーブルを介して提供することが可能なものよりも高い精度の測定タイミング信号を要求する場合には、システムは、その代わりに、スレーブGPS受信機によって生成されたタイミング信号を使用することができる。
【0029】
上述したシステムは、地震測定または変形監視のいずれに使用されようとも、各スレーブGPS受信機において、システム全体にわたって同期化されているタイミング信号を局所的に生成することを、その利点の1つとして有する。上述したように、ケーブル長の制限は、GPS衛星を連続的に追跡することに失敗することによって自身のタイミング信号を失ったスレーブGPS受信機に対して近くのスレーブGPS受信機からのタイミング信号を提供することによって回避される。さらに、スレーブGPS受信機は、基地GPS受信機により提供される追跡支援情報を使用して、上空の視野が制限された環境においてタイミング信号を生成し、したがって、従来のGPS受信機が役に立たないエリアで動作することができる。これらの利点は、スレーブGPS受信機の正確な位置がどのようにして決定されるかに関係なくもたらされる。したがって、システムのいくつかのまたは全ての利点は、他のバッチ処理技術を使用して、スレーブGPS受信機の正確な位置を決定することにより、または、測量などの従来の方法(これは、時間及び労力集約的ではあるが)を使用して位置を決定することにより達成される。
【0030】
また、システムは、スレーブGPS受信機に追跡支援情報を提供することなく動作することができる。これらの動作では、基地GPS受信機は、距離情報、すなわち、バッチ処理中になされる二重差(double difference)計算で使用されることになる擬似距離及びキャリア測定情報を、データ記録及びコントロールセンターに提供する。スレーブGPS受信機は、最初に、従来の方式で動作して、視野内の衛星からの衛星信号を取得して追跡する。上述したように、スレーブGPS受信機は、関連する距離情報をデータ記録及びコントロールセンターに提供し、センターはバッチ処理を実行する。その後、センターは、スレーブGPS受信機に位置情報を提供し、スレーブGPS受信機は、この位置情報に基づいて衛星信号を取得して追跡し続ける。このように、すなわち、追跡支援なしで動作するスレーブGPS受信機は、衛星信号を連続的に追跡することがより困難であろう。したがって、DUに、同期化したタイミング信号を提供するために、より多くのスレーブGPS受信機が、近くの受信機からのタイミング信号を要求することになる。しかしながら、このように動作するシステムは、追跡支援がスレーブGPS受信機に提供されないときには距離情報を収集するために必要な長期間の長さが長くなるにもかかわらず、スレーブGPS受信機の正確な位置を決定することができる。
【図面の簡単な説明】
【0031】
【図1】本発明にしたがって構成された地震測定システムの機能ブロック図である。
【図2】本発明にしたがって構成された変形監視システムの機能ブロック図である。
【技術分野】
【0001】
「関連出願への相互参照」
本出願は、Patrick C. Fentonによって2003年7月17日に出願された、「A SEISMIC MEASURING SYSTEM INCLUDING GPS RECEIVERS」と題する米国仮特許出願第60/488,124の利益を主張するものである。尚、この仮特許出願は、参照により本明細書に組み込まれるものとする。
【0002】
本発明は、一般に、地震データ収集システムに関連し、特に、3次元地震データを収集して解析するためのシステムに関する。
【背景技術】
【0003】
3次元地震データを解析するためにシステムは、地震測定値に対応する信号を生成するデジタイザユニット(DU)に取り付けられて、これらのDUと通信する一式の地中聴音器から地震測定値を収集する。DUは、対象とするサイト(場所)をまたぐケーブルに沿った選択された位置に配置され、一式の地中聴音器から測定値を取得して、ケーブルを介してデータ記録及び制御センターに、対応する信号を送信する。これらのデータは、例えば、そのサイトに油脈が存在する可能性を判定するために使用される。典型的なサイトには、数千のDUを設けることができる(各々のDUが、関連する一式の地中聴音器を備える)。
【発明の開示】
【発明が解決しようとする課題】
【0004】
測定装置をセットアップし動作させることは、時間がかかりかつ複雑な作業である。DUの位置は、厳格な垂直及び水平方向における厳格な精度の限度内で既知でなければならず、一般に、それぞれのDUの位置は、光学測量技術である、GPS RTK「バックパック(back-pack)システムまたはGPS/INSシステムを用いて個々に決定される。さらに、サイトの見通しがよくない、すなわち、選択されたDUの位置にある植物の葉を取り除くことはできない場合がある。DUの位置を決定するプロセスは、このように、見通し線がさえぎられているときには、さらに、時間がかかりかつ複雑なものとなる。DUによって取得された地中聴音器の測定値を、厳格なタイミング制限内で同期化しなければならない。従来の既知のシステムでは、タイミング信号は、ケーブルを介して送られ、測定値はこのタイミング信号に応答して種々のDUで取得される。したがって、関連するタイミング信号の遅延を回避するために、それぞれのケーブの長さは制限されている。この結果、所与の時刻に試験することが可能なエリアもまた、ケーブルの長さによって制限される。
【0005】
必要とされているのは、セットアップに要する時間をより少なくでき、かつより大きなエリアに対して正確に動作することが可能なシステムである。
【課題を解決するための手段】
【0006】
「発明の概要」
3次元の地震データを解析するためのシステムは、DU、地中聴音器、データ記録及びコントロールセンターに加えて、基地GPS受信機(ベースGPS受信機)及び実質的に上空の視界が制限されていない関連するアンテナと、それぞれのDUの位置にある低電力スレーブGPS受信機とを備えている。低電力GPS受信機は、基地GPS受信機によって提供される追跡支援情報を使用して、GPS衛星信号を取得して追跡する。スレーブGPS受信機は、追跡支援情報を使用して、樹葉による天蓋状の覆いの存在などのサイトにおける条件のために受信機で比較的弱くなっている場合があるGPS衛星信号を取得して追跡することができる。さらに、後述するように、システムは、スレーブGPS受信機を動作させて、関連する距離情報を処理し、これによって、それぞれのスレーブGPS受信機の上空の視界が大幅に悪くなった場合でも、それぞれのDUの正確な位置が計算され、かつ、同期化されたタイミング情報が各DUに提供されるようにする。
【0007】
所与のDUの正確な位置を決定するために、関連するスレーブGPS受信機は、追跡支援情報を使用して、受信機の視界内にある衛星からGPS衛星信号を取得して追跡する。スレーブGPS受信機は、次に、関連する距離情報を生成して、この情報をデータ記録及びコントロールセンターに提供する。データ記録及びコントロールセンターは、適宜、数時間や数日といった長時間にわたって距離情報を収集する。このセンターは、次に、その情報をバッチ処理(一括処理)して、単一の計算された位置を生成する。長時間にわたって収集された情報を処理することによって、システムは、スレーブGPS受信機が、3または4の比較的短い時間間隔わたって、その長時間の期間中さまざまな上空の位置にある少なくとも2つの衛星からのデータを同時に観測して収集することが可能なかぎりは、地震測定に必要とされる厳格な垂直及び水平方向の許容誤差内でスレーブGPS受信機の位置を決定することができる。したがって、バッチ処理を行うことによって、GPS衛星信号を絶えず追跡する必要性、及び/または、それぞれの時間間隔にわたって同じ組の衛星からの信号を追跡する必要性がなくなる。
【0008】
データ記録及びコントロールセンターは、その後、それぞれのスレーブGPS受信機に計算された正確な位置を提供する。スレーブGPS受信機は、次に、この位置情報と、基地GPS受信機によって提供された追跡支援情報を使用して、地中聴音器からの地震データの集合を操作する際に使用する、同期化されたタイミング信号を生成する。タイミング信号は、GPS衛星信号中のコードに関連付けられた1パルス/秒のストローブと、関連するRS−232タイムタグ(時間タグまたは時刻タグ)データを有する。タイミング信号は、複数のスレーブGPS受信機が、個別に、地中聴音器のデータ収集動作中に少なくとも1つのGPS衛星からの信号を追跡し続けている限りは、システム全体において同期化されたままである。データ収集動作中に追跡を行っているスレーブGPS受信機は、同期化されたタイミング信号を、接続ケーブルを介して、近くの追跡を行っていないスレーブGPS受信機に提供する。したがって、ケーブル長に対する制限は、本質的に、それぞれのスレーブGPS受信機間に存在する。これは、それぞれのDUとコントロールセンターの間にケーブル長に対する制限が課されなければならない既知の従来システムとは対照的である。
【0009】
したがって、システムは、単一の基地GPS受信機によって提供された追跡支援情報により強化された取得及び追跡能力を有する比較的廉価なスレーブGPS受信機を使用して、それぞれのDUに対する正確な位置情報(または測位情報)と、地中聴音器からのデータの集合に対する同期化されたタイミング信号を提供する。さらに、システムは、正確な位置情報(または測位情報)と同期化されたタイミング信号の生成を、従来の方式で動作するGPS受信機が、たとえば、それぞれのGPS受信機におけるGPS衛星信号の受信を妨害する木の葉による遮りのために一般になしえなかった環境において行うことができる。
【0010】
以下、本発明を添付図面を参照して説明する。
【実施例】
【0011】
「例示的な実施形態の詳細な説明」
図1には、地震測定値を収集して分析するためのシステム100が示されている。システム100は、DU7を介してデータ記録及びコントロールセンター12に地震データを供給する複数の地中聴音器8を備える。DUは、対象とするサイト上の選択された位置に配置され、ケーブル14によってセンターに接続されている。センター12は、地中聴音器によって収集されたデータを処理し、及び、格納する1つ以上のワークステーション2とデータ記憶装置1を備える。さまざまなケーブル14(ケーブルの1つだけが図示されている)からの信号は、従来の方式で動作するマルチプレクサ4を介して1つ以上のワークステーション2に供給される。システムは一般に数千のDUを備え、各DUは、関連する地中聴音器(一式)を有する。
【0012】
データ記録及びコントロールセンター12は、さらに、見通しのきく上空の視界を有するように位置決めされた基地GPSアンテナ13を使用してさまざまなGPS衛星9からの信号を受信する、全地球測位システム(GPS)の基地受信機3を備える。図示されているように、高い塔5が、GPSアンテナ13に見通しのきく空の視界をもたらすために必要になる場合がある。比較的廉価な低電力(L1)受信機とすることができるスレーブGPS受信機6が、それぞれのDU7に配置される。より詳細に後述するように、スレーブGPS受信機6は、データ記録及びコントロールセンター12に距離情報を提供し、かつ、DU7に、同期化されたデータ収集タイミング信号を提供する。また、図示されているように、いくつかのまたは全てのスレーブGPS受信機6は、さまざまな木11の下またはそれらの近くに配置され、このため、任意の所与の時間において、いくつかの上空の位置にあるGPS衛星9からの信号10が、さまざまなスレーブGPS受信機で利用できなくなったり、または、それらの受信機において弱められる可能性がある。
【0013】
基地GPS受信機3は、視野内の各GPS衛星からの信号10を取得して追跡し、さまざまな時刻に、関連する追跡支援情報をスレーブGPS受信機に提供する。基地GPS受信機は、追跡支援情報として、少なくとも、視野内の衛星のリスト、関連するドップラー周波数オフセット及びブロードキャストデータシンボル(broadcast data symbol)を提供する。スレーブGPS受信機は、比較的狭い帯域幅の追跡ループ(トラッキングループ)を用いて種々の衛星からの信号を取得して追跡するために、追跡支援情報を使用する。これにより、それぞれのスレーブGPS受信機は、これらの受信機のところで弱くなっているGPS衛星信号を利用することができるようになる。たとえば、スレーブGPS受信機は、従来の方式で動作している、すなわち、追跡支援情報なしで動作しているGPS受信機によって要求される信号より10〜15dB低い信号を取得して追跡することができる。
【0014】
各スレーブGPS受信機6は、所与の時刻にこの受信機が追跡することができる衛星信号に基づいて距離情報を生成し、その距離情報をデータ記録及びコントロールセンター12に提供する。距離情報には、追跡されている信号の各々についてのコード及びキャリアタイミング情報が含まれる。センターは、たとえば、数時間、数日または数週間といった長時間にわたって距離情報を収集し、次に、受信機の正確な緯度、経度及び高さを計算するために収集された情報をバッチ処理する。センターは、また、より詳細に後述するように、バッチ処理による位置計算において使用される情報が十分に信頼できるものであることを保証するために、収集された距離情報の品質を計算する。
【0015】
スレーブGPS受信機が、3また4の比較的短い時間間隔にわたって、上記長時間の時間中に異なる上空の位置にある少なくとも2つの衛星を同時に追跡する限りは、距離情報のバッチ処理は、地震測定に要求される許容誤差内でスレーブGPS受信機の位置を計算する。したがって、バッチ処理を行うことにより、スレーブGPS受信機が、複数の衛星からのGPS衛星信号を絶えず追跡すること、及び/または、同じ組のGPS衛星からの信号を追跡することを必要とすることなく、システムは、スレーブ受信機の正確な位置を計算することが可能となる。
【0016】
データ記録及びコントロールセンター12は、一定位置にある所与のスレーブGPS受信機から収集された距離データをバッチ処理して、単一の位置(すなわち、緯度、経度、及び高さ)、及び関連する位置共分散を計算する。バッチ処理は、30〜60メートル以内の精度であることが期待される地球上における位置の推定値を生成するために、収集された距離データに対する複数の段階を含み、その第1の段階は、全ての収集されたデータ、すなわち、全ての擬似距離(pseudorange)及びキャリア位相情報を使用する。上述したように、精度は、距離データの全体的品質によって悪影響を受ける。距離データは、長時間にわたって、すなわち、数時間、数日等にわたって、さまざまな時刻に受信機の視野にある衛星からの信号に基づいて生成される。一般的には、距離データは8〜24時間の期間にわたって収集されることが期待されている。植物の葉に起因して、または受信可能範囲が部分的であることによって、スレーブGPS受信機の上空の視野が制限されているために、受信機は、上記長時間のほとんどの期間にわたって視野内に同じ衛星の組を有しない可能性があり、及び/または、特定の時刻に視野内に2つ以上の衛星を有しない可能性がある。さらに、いくつかの衛星の信号は、植物の葉や近くになる他の障害物によって受信機に反射される信号による大きな多経路成分信号によって歪む可能性がある。
【0017】
データに対する次の段階として、データ記録及びコントロールセンターは、多経路干渉をより受けにくいキャリア位相測定値のみを使用して、計算された位置及び位置共分散を改善する。受信機は、第1の段階からの推定された位置及び位置共分散から開始し、計算集約的な手法で、推定された位置及び関連する位置共分散の更新値を決定するために、キャリアサイクルのアンビギティー(曖昧さ)を解消する。推定された位置及び関連する位置共分散は、コード時間(コードエポック:code epoch)毎に更新される。このコード時間において、2つ以上の衛星が受信機の視野内にあり、すなわち、このとき、二重差(double difference)を計算してキャリアサイクルのアンビギティーを解消することができる。第2の段階の終わりにおける位置予測値の精度は3〜6メートルの範囲内であることが期待されるが、誤差のほとんどが高さ成分によるものである。
【0018】
データに対する第3の段階では、キャリア位相測定値に基づいて、位置及び位置共分散を第2の段階からの最良の推定値に保持し、感知される動き(perceived movement)をサーチする。この場合、処理は、ほんのわずかな感知される動きまたはゼロの感知される動き(すなわち、感知される動きがない)に関連するデータをさらに処理するために選択を行う。処理は、この更なる処理で使用される種々のデータに選択的に重み付けを行うこともできる。
【0019】
より具体的には、第3の段階の処理は、一定位置に関して二重差キャリア位相測定値の残差を計算し、その残差が感知される動きを示すか否かを判定する。残差は、キャリア位相測定値において連続性がある時間にわたって、すなわち、捕捉の中断(またはロックの喪失:loss of lock)またはサイクルスリップがない期間にわたって累積される。処理は、残差の平方の和が正規化閾値より小さい場合に、及び、さらに、その平方の和の増加率が所定の閾値より小さい場合に、測定データが所与の時間にわたって有効であると判定する。これら両方の条件が満たされない場合には、処理は、サイクルスリップ間の時間全体にわたって、関連する一連のキャリア測定値が無効であることを示す(または、そのことを示すフラグを立てる)。処理は、また、有効とみなされているそれぞれの測定値に重みを割り当てることができる。したがって、処理は、いくつかの測定値の重み付けを下げて、相互に関連する多経路誤差、すなわち、非白色ノイズ誤差が、上記更なる処理に悪影響を与えるのを防止することができる。重み付けを下げることは、たとえば、特定のコード時間にわたる測定値のうちの少数の測定値、たとえば、4つの全ての測定値のうちの1つ、を使用するか、または、関連する計算においてより大きな標準偏差を使用するいった形態をとることができる。
【0020】
次に、処理は、第3の段階の結果に基づいて推定された位置を再計算する。したがって、システムは、計算値から、無効として示された測定値を除去して、残りの測定値に適切な重みを割り当て、新しい位置推定値及び関連する位置共分散を生成する。
【0021】
処理システムは、次に、位置及び位置共分散を新しい推定値に固定された状態に保持して、第3の段階、すなわち、関連する残差に基づいて測定値の有効性を判定し及びそれらの測定値について重み付けを行う処理ステップを繰り返す。このステップにおいて、システムは、新しい推定値に関してではなく、以前の推定された位置及び位置共分散に対して感知される動きを示した特定の測定値を良好な測定値であると認めることができる。次に、処理システムは、更新された重み付けと有効性の判定を用いて、次の推定された位置及び関連する位置共分散を決定し、こうした繰り返し(すなわち、新たな重み付け及び位置の次の推定値を決定すること)を、推定された高さが、それらの繰り返し間の所定の閾値よりも小さく変化するまで継続する。
【0022】
バッチ処理の動作については、本願と共通の譲受人に譲渡された「METHOD FOR POSITIONING USING GPS IN A RESTRICTIVE COVERAGE ENVIRONMMENT」と題する同時係属中の米国仮特許出願(出願番号は現時点で不明。代理人事件番号016437-0218R)により詳細に記載されている。尚、この仮特許出願は参照によりその全体を本明細書に組み込むものとする。
【0023】
システムによって実施されるバッチ処理は、既知のassisted GPS、すなわち、e911システムとも呼ばれるA-GPSシステムにおいて実施される処理とは大きく異なる。A-GPSシステムは、携帯電話内のGPS受信機が、3〜4つのGPS衛星からの信号を同時に高速に取得して追跡することに基づいて、本質的に、約100メートル以内で「瞬間的な」位置を決定することを可能にする。A-GPSシステムは、地震測定に必要とされる厳格な許容誤差を満足するように設計されておらず、また、そのような許容誤差を満たすものでもない。
【0024】
図1をさらに参照すると、データ記録及びコントロールセンター12が、必要とされる許容誤差内でそれぞれのスレーブGPS受信機6の位置を計算すると、センターはその位置を受信機に提供する。スレーブGPS受信機6は、次に、基地GPS受信機によって供給されたそれらの位置及び追跡支援情報を使用して、受信したGPS衛星信号内のコードのタイミングに対応する同期化された1パルス/秒のタイミング信号生成し、また、その1パルス/秒の信号に関連するRS-232時刻タグメッセージを生成する。DUは、タイミング信号(1パルス/秒及び時刻タグメッセージ)を使用して、地中聴音器からのデータの集合を操作する。所与のスレーブGPS受信機は、GPSコードに関連付けられたタイミング信号を生成するために任意の所与の時刻に単一のGPS衛星からの信号を追跡するだけでよく、したがって、DU及び関連するスレーブGPS受信機は、システム全体にわたってそれらのタイミング信号を同期した状態に維持することができなければならない。
【0025】
任意の所与の時刻に1つ以上のスレーブGPS受信機6が衛星信号の追跡に失敗した場合には、システムは、近くの追跡中のスレーブGPS受信機から、接続ケーブル14を介して、追跡中でないスレーブGPS受信機に、同期化されたタイミング信号を提供することにより、依然として地中聴音器からのデータを収集することができるであろう。スレーブGPS受信機はそれぞれ、ケーブルを介してタイミング情報を送信することができ、これによって、所与の受信機が、それ自体のタイミング情報または受信したタイミング情報を適宜使用することが可能となる。受信したタイミング信号は、そのタイミング信号を提供する受信機が、受信した信号にたよらなければならない受信機の約1キロメートル以内にある限り同期化されたままとなる。
【0026】
代替的なシステムの構成は、追跡支援情報の発生源としてDUに配置された受信機の1つを使用することができる。したがって、DUが、上空の視野が比較的見通しが良い場所に配置される場合には、設置者は、この受信機を構成して、追跡支援情報を種々のスレーブGPS受信機に供給するようにすることができる。したがって、この構成では、基地GPS受信機3、基地GPSアンテナ13、及び、高い塔5は必要でない場合がある。これに代えて、適宜、システムは、追跡支援情報の発生源としてDUに配置された2つ以上の受信機を使用することができ、この場合、選択された受信機は、上空の特定の領域におけるGPS衛星に対する追跡支援情報の発生源である。
【0027】
いずれの構成でも、システムを使用して、変形(歪みなど)の監視を実行することもできる。変形監視は、潜在的に不安定な地面に配置される場合がある橋、ダム、建物、パイプラインなどの、本質的に固定された対象とする地点の動きをチェックする。ここで、図2を参照すると、変形監視システム200は、追跡支援情報を提供する、上空への見通しのよい視野を有する1つ以上の基地GPS受信機3と、監視装置として機能する複数のスレーブGPS受信機6を備えている。スレーブGPS受信機は、地中に埋め込まれたパイプ71にポール72により堅く取り付けられている。信号受信機70は、GPS受信機6及びケーブル14に信号を提供するとともにそれらからの信号を受信する。データ記録及びコントロールセンター12は、それぞれの基地GPS受信機及びスレーブGPS受信機から距離情報を収集し、距離情報をバッチ処理して、パイプ71に沿ったそれぞれのスレーブGPS受信機の正確な位置を決定する。それぞれのスレーブ受信機は、1つまたは複数の基地GPS受信機によって提供される追跡支援を用いて、衛星信号を追跡し続け、距離情報をデータ記録及びコントロールセンターに提供する。センターは、次に、変形を示す、それぞれのスレーブGPS受信機の位置の変化の有無を決定する。
【0028】
変形監視システム内の信号受信機70は、また、パイプ71に取り付けられている(不図示の)歪み計または傾斜計(tilt meter)などの副次的な測定装置からの他のタイプの測定データをデータ記録及びコントロールセンター12に提供することができる。このタイプのデータについては、データ記録及びコントロールセンターは、ケーブル14を介して、地震などの時刻タグ移動「事象」にタイミング信号を提供することができる。これらのまたは他の副次的な装置によってなされる測定に対して、システムが、ケーブルを介して提供することが可能なものよりも高い精度の測定タイミング信号を要求する場合には、システムは、その代わりに、スレーブGPS受信機によって生成されたタイミング信号を使用することができる。
【0029】
上述したシステムは、地震測定または変形監視のいずれに使用されようとも、各スレーブGPS受信機において、システム全体にわたって同期化されているタイミング信号を局所的に生成することを、その利点の1つとして有する。上述したように、ケーブル長の制限は、GPS衛星を連続的に追跡することに失敗することによって自身のタイミング信号を失ったスレーブGPS受信機に対して近くのスレーブGPS受信機からのタイミング信号を提供することによって回避される。さらに、スレーブGPS受信機は、基地GPS受信機により提供される追跡支援情報を使用して、上空の視野が制限された環境においてタイミング信号を生成し、したがって、従来のGPS受信機が役に立たないエリアで動作することができる。これらの利点は、スレーブGPS受信機の正確な位置がどのようにして決定されるかに関係なくもたらされる。したがって、システムのいくつかのまたは全ての利点は、他のバッチ処理技術を使用して、スレーブGPS受信機の正確な位置を決定することにより、または、測量などの従来の方法(これは、時間及び労力集約的ではあるが)を使用して位置を決定することにより達成される。
【0030】
また、システムは、スレーブGPS受信機に追跡支援情報を提供することなく動作することができる。これらの動作では、基地GPS受信機は、距離情報、すなわち、バッチ処理中になされる二重差(double difference)計算で使用されることになる擬似距離及びキャリア測定情報を、データ記録及びコントロールセンターに提供する。スレーブGPS受信機は、最初に、従来の方式で動作して、視野内の衛星からの衛星信号を取得して追跡する。上述したように、スレーブGPS受信機は、関連する距離情報をデータ記録及びコントロールセンターに提供し、センターはバッチ処理を実行する。その後、センターは、スレーブGPS受信機に位置情報を提供し、スレーブGPS受信機は、この位置情報に基づいて衛星信号を取得して追跡し続ける。このように、すなわち、追跡支援なしで動作するスレーブGPS受信機は、衛星信号を連続的に追跡することがより困難であろう。したがって、DUに、同期化したタイミング信号を提供するために、より多くのスレーブGPS受信機が、近くの受信機からのタイミング信号を要求することになる。しかしながら、このように動作するシステムは、追跡支援がスレーブGPS受信機に提供されないときには距離情報を収集するために必要な長期間の長さが長くなるにもかかわらず、スレーブGPS受信機の正確な位置を決定することができる。
【図面の簡単な説明】
【0031】
【図1】本発明にしたがって構成された地震測定システムの機能ブロック図である。
【図2】本発明にしたがって構成された変形監視システムの機能ブロック図である。
【特許請求の範囲】
【請求項1】
地震測定システムであって、
地震活動に関連するデータを収集するための複数のデジタイザ装置及び関連する地中聴音器と、
GPS衛星信号を取得して追跡し、かつ、距離情報を生成する基地GPS受信機、及び十分な上空視野を有する関連するアンテナと、
複数のスレーブGPS受信機であって、それぞれが、各デジタイザ装置の位置にあり、GPS衛星信号を取得して追跡し、かつ、距離情報を生成する複数のスレーブGPS受信機と、
データ記録及びコントロールセンター
を備え、
前記データ記録及びコントロールセンターは、
長期間にわたって前記距離情報を収集して、その情報をバッチ処理して、前記それぞれのスレーブGPS受信機及び関連するデジタイザ装置の位置を計算し、及び、
前記それぞれのデジタイザ装置によって提供されるデータを収集し、解析して、地震測定値を生成することからなる、システム。
【請求項2】
前記基地GPS受信機は、視野内のGPS衛星に関連する追跡支援情報を提供し、
前記スレーブGPS受信機は、前記GPS衛星からの信号を取得し追跡する際に、前記追跡支援情報を利用する
ことからなる、請求項1のシステム。
【請求項3】
前記スレーブGPS受信機は、さらに、前記デジタイザ装置によるデータ収集のタイミングを制御するためにタイミング信号を生成する、請求項2のシステム。
【請求項4】
前記データ記録及びコントロールセンターは、前記計算した位置を前記それぞれのスレーブGPS受信機に返し、
前記それぞれのスレーブGPS受信機は、前記計算した位置及び前記追跡支援情報を利用して、少なくとも1つのGPS衛星からの信号を取得して追跡し、前記追跡したGPS衛星信号内のコードのタイミングに関連付けられたタイミング信号を生成する
ことからなる、請求項2のシステム。
【請求項5】
前記基地GPS受信機は、前記デジタイザ装置のうちの1つデジタイザ装置の位置に配置される、請求項1のシステム。
【請求項6】
GPS衛星信号を追跡していないスレーブGPS受信機に関連したデジタイザ装置が、少なくとも1つのGPS衛星信号を追跡している近くのスレーブGPS受信機によって提供されるタイミング信号を使用する、請求項3のシステム。
【請求項7】
前記基地GPS受信機に関連したアンテナが塔に配置される、請求項1のシステム。
【請求項8】
それぞれのスレーブGPS受信機の上空の視野が制限されている、請求項1のシステム。
【請求項9】
前記追跡支援情報が、視野内にある衛星のリストと、関連するドップラー周波数オフセット及びブロードキャストデータシンボルを有する、請求項2のシステム。
【請求項10】
地震測定システムであって、
地震活動に関連するデータを収集するための複数のデジタイザ装置及び関連する地中聴音器と、
上空の少なくとも一部分について十分な視野を有する1つ以上の基地GPS受信機であって、視野内のGPS衛星に関連する追跡支援情報を提供する、1つ以上の基地GPS受信機と、
前記デジタイザ装置の残りの位置にある複数のスレーブGPS受信機であって、前記追跡支援情報を利用して、前記GPS衛星からの信号を取得して追跡し、前記追跡したGPS衛星信号内のコードのタイミングに関連付けられたタイミング信号を生成して、前記デジタイザ装置によるデータ収集のタイミングを制御することからなる、複数のスレーブGPS受信機と、
前記それぞれのデジタイザ装置により提供されるデータを収集して解析するためのデータ記録及びコントロールセンター
を備える、システム。
【請求項11】
前記基地GPS受信機及びスレーブGPS受信機は、関連する距離情報を生成し、
前記データ記録及びコントロールセンターは、長時間にわたって前記スレーブGPS受信機から距離情報を収集し、その情報をバッチ処理して、前記それぞれのスレーブGPS受信機の位置を計算する
ことからなる、請求項10のシステム。
【請求項12】
前記データ記録及びコントロールセンターは、前記計算した位置を前記それぞれのスレーブGPS受信機に返し、
前記それぞれのスレーブGPS受信機は、前記計算した位置及び前記追跡支援情報を利用して、少なくとも1つのGPS衛星からの信号を取得して追跡する
ことからなる、請求項11のシステム。
【請求項13】
前記基地GPS受信機は、上空の各部分に関連する追跡支援情報を提供し、その上空の各部分に対して、前記それぞれの基地GPS受信機の視野が妨害されない、請求項10のシステム。
【請求項14】
前記1つ以上の基地GPS受信機は、それぞれ、デジタイザ装置の位置に配置される、請求項10のシステム。
【請求項15】
変形監視システムであって、
十分な上空視野を有する関連するアンテナを備える1つ以上の基地GPS受信機であって、GPS衛星信号を取得して追跡し、かつ、距離情報を提供する1つ以上の基地GPS受信機と、
監視されるサイト上に選択的に配置された複数のスレーブGPS受信機であって、GPS衛星信号を取得して追跡し、かつ、距離情報を提供する、複数のスレーブGPS受信機と、
データ記録及びコントロールセンター
を備え、
前記データ記録及びコントロールセンターは、
長期間にわたって前記距離情報を収集して、その情報をバッチ処理して、前記それぞれのスレーブGPS受信機の位置を計算し、及び、
前記スレーブGPS受信機によって提供される距離情報を収集し、解析して、変形を示す相対的な動きを決定する
ことからなる、システム。
【請求項16】
前記データ記録及びコントロールセンターは、前記計算した位置を前記それぞれのスレーブGPS受信機に返し、
前記それぞれのスレーブGPS受信機は、前記計算した位置及び前記追跡支援情報を利用して、少なくとも1つのGPS衛星からの信号を取得して追跡し、前記追跡したGPS衛星信号内のコードのタイミングに関連付けれたタイミング信号を生成する
ことからなる、請求項15のシステム。
【請求項17】
前記GPS衛星信号を喪失したスレーブGPS受信機に関連したデジタイザ装置が、少なくとも1つのGPS衛星信号を追跡している近くのスレーブGPS受信機によって提供されるタイミング信号を使用する、請求項15のシステム。
【請求項1】
地震測定システムであって、
地震活動に関連するデータを収集するための複数のデジタイザ装置及び関連する地中聴音器と、
GPS衛星信号を取得して追跡し、かつ、距離情報を生成する基地GPS受信機、及び十分な上空視野を有する関連するアンテナと、
複数のスレーブGPS受信機であって、それぞれが、各デジタイザ装置の位置にあり、GPS衛星信号を取得して追跡し、かつ、距離情報を生成する複数のスレーブGPS受信機と、
データ記録及びコントロールセンター
を備え、
前記データ記録及びコントロールセンターは、
長期間にわたって前記距離情報を収集して、その情報をバッチ処理して、前記それぞれのスレーブGPS受信機及び関連するデジタイザ装置の位置を計算し、及び、
前記それぞれのデジタイザ装置によって提供されるデータを収集し、解析して、地震測定値を生成することからなる、システム。
【請求項2】
前記基地GPS受信機は、視野内のGPS衛星に関連する追跡支援情報を提供し、
前記スレーブGPS受信機は、前記GPS衛星からの信号を取得し追跡する際に、前記追跡支援情報を利用する
ことからなる、請求項1のシステム。
【請求項3】
前記スレーブGPS受信機は、さらに、前記デジタイザ装置によるデータ収集のタイミングを制御するためにタイミング信号を生成する、請求項2のシステム。
【請求項4】
前記データ記録及びコントロールセンターは、前記計算した位置を前記それぞれのスレーブGPS受信機に返し、
前記それぞれのスレーブGPS受信機は、前記計算した位置及び前記追跡支援情報を利用して、少なくとも1つのGPS衛星からの信号を取得して追跡し、前記追跡したGPS衛星信号内のコードのタイミングに関連付けられたタイミング信号を生成する
ことからなる、請求項2のシステム。
【請求項5】
前記基地GPS受信機は、前記デジタイザ装置のうちの1つデジタイザ装置の位置に配置される、請求項1のシステム。
【請求項6】
GPS衛星信号を追跡していないスレーブGPS受信機に関連したデジタイザ装置が、少なくとも1つのGPS衛星信号を追跡している近くのスレーブGPS受信機によって提供されるタイミング信号を使用する、請求項3のシステム。
【請求項7】
前記基地GPS受信機に関連したアンテナが塔に配置される、請求項1のシステム。
【請求項8】
それぞれのスレーブGPS受信機の上空の視野が制限されている、請求項1のシステム。
【請求項9】
前記追跡支援情報が、視野内にある衛星のリストと、関連するドップラー周波数オフセット及びブロードキャストデータシンボルを有する、請求項2のシステム。
【請求項10】
地震測定システムであって、
地震活動に関連するデータを収集するための複数のデジタイザ装置及び関連する地中聴音器と、
上空の少なくとも一部分について十分な視野を有する1つ以上の基地GPS受信機であって、視野内のGPS衛星に関連する追跡支援情報を提供する、1つ以上の基地GPS受信機と、
前記デジタイザ装置の残りの位置にある複数のスレーブGPS受信機であって、前記追跡支援情報を利用して、前記GPS衛星からの信号を取得して追跡し、前記追跡したGPS衛星信号内のコードのタイミングに関連付けられたタイミング信号を生成して、前記デジタイザ装置によるデータ収集のタイミングを制御することからなる、複数のスレーブGPS受信機と、
前記それぞれのデジタイザ装置により提供されるデータを収集して解析するためのデータ記録及びコントロールセンター
を備える、システム。
【請求項11】
前記基地GPS受信機及びスレーブGPS受信機は、関連する距離情報を生成し、
前記データ記録及びコントロールセンターは、長時間にわたって前記スレーブGPS受信機から距離情報を収集し、その情報をバッチ処理して、前記それぞれのスレーブGPS受信機の位置を計算する
ことからなる、請求項10のシステム。
【請求項12】
前記データ記録及びコントロールセンターは、前記計算した位置を前記それぞれのスレーブGPS受信機に返し、
前記それぞれのスレーブGPS受信機は、前記計算した位置及び前記追跡支援情報を利用して、少なくとも1つのGPS衛星からの信号を取得して追跡する
ことからなる、請求項11のシステム。
【請求項13】
前記基地GPS受信機は、上空の各部分に関連する追跡支援情報を提供し、その上空の各部分に対して、前記それぞれの基地GPS受信機の視野が妨害されない、請求項10のシステム。
【請求項14】
前記1つ以上の基地GPS受信機は、それぞれ、デジタイザ装置の位置に配置される、請求項10のシステム。
【請求項15】
変形監視システムであって、
十分な上空視野を有する関連するアンテナを備える1つ以上の基地GPS受信機であって、GPS衛星信号を取得して追跡し、かつ、距離情報を提供する1つ以上の基地GPS受信機と、
監視されるサイト上に選択的に配置された複数のスレーブGPS受信機であって、GPS衛星信号を取得して追跡し、かつ、距離情報を提供する、複数のスレーブGPS受信機と、
データ記録及びコントロールセンター
を備え、
前記データ記録及びコントロールセンターは、
長期間にわたって前記距離情報を収集して、その情報をバッチ処理して、前記それぞれのスレーブGPS受信機の位置を計算し、及び、
前記スレーブGPS受信機によって提供される距離情報を収集し、解析して、変形を示す相対的な動きを決定する
ことからなる、システム。
【請求項16】
前記データ記録及びコントロールセンターは、前記計算した位置を前記それぞれのスレーブGPS受信機に返し、
前記それぞれのスレーブGPS受信機は、前記計算した位置及び前記追跡支援情報を利用して、少なくとも1つのGPS衛星からの信号を取得して追跡し、前記追跡したGPS衛星信号内のコードのタイミングに関連付けれたタイミング信号を生成する
ことからなる、請求項15のシステム。
【請求項17】
前記GPS衛星信号を喪失したスレーブGPS受信機に関連したデジタイザ装置が、少なくとも1つのGPS衛星信号を追跡している近くのスレーブGPS受信機によって提供されるタイミング信号を使用する、請求項15のシステム。
【図1】

【図2】
【図2】
【公表番号】特表2007−505289(P2007−505289A)
【公表日】平成19年3月8日(2007.3.8)
【国際特許分類】
【出願番号】特願2006−519735(P2006−519735)
【出願日】平成16年7月16日(2004.7.16)
【国際出願番号】PCT/CA2004/001029
【国際公開番号】WO2005/008288
【国際公開日】平成17年1月27日(2005.1.27)
【出願人】(598093381)ノヴァテル・インコーポレイテッド (7)
【公表日】平成19年3月8日(2007.3.8)
【国際特許分類】
【出願日】平成16年7月16日(2004.7.16)
【国際出願番号】PCT/CA2004/001029
【国際公開番号】WO2005/008288
【国際公開日】平成17年1月27日(2005.1.27)
【出願人】(598093381)ノヴァテル・インコーポレイテッド (7)
[ Back to top ]