
GPS受信装置
【課題】自車位置の検出に要する時間を短縮することができるGPS受信装置を提供する。
【解決手段】複数の人工衛星から送信されるGPS信号を受信し、該GPS信号の測位情報より位置を算出するGPS受信装置に、所定の移動体から送信された情報を受信する受信手段と、前記情報から求められた位置を基準位置として初期サーチを行い、現在位置を特定する測位手段とを備えることにより達成される。
【解決手段】複数の人工衛星から送信されるGPS信号を受信し、該GPS信号の測位情報より位置を算出するGPS受信装置に、所定の移動体から送信された情報を受信する受信手段と、前記情報から求められた位置を基準位置として初期サーチを行い、現在位置を特定する測位手段とを備えることにより達成される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両などに搭載されるGPS受信装置に関する。
【背景技術】
【0002】
複数の人工衛星から送信されるGPS信号を受信して、移動体の位置や速度を計測するGPSシステムが普及している。
【0003】
このGPSシステムは、移動体に設けられたGPSアンテナによって少なくとも3個以上の人工衛星を捕捉し、該GPSアンテナが捕捉した天空に位置する3個以上の人工衛星から送信されるGPS信号を受信してこのGPSアンテナに接続されたGPS受信機により測位情報を算出し、緯度、経度、高度などの位置情報を得ることができる。
【0004】
また、これら複数個の人工衛星から送られたGPSデータに含まれる位置データ、時間データ、衛星データに基づいて、現在位置、高度および移動した距離を算出することができる。また、上記データに時間データを加えることにより移動スピードを算出することができる。
【0005】
ところで、GPSシステムが車両に搭載された場合、該車両が停車し、電源が落とされ、その後電源の投入が行われた場合、直前の停車位置を基準に測位が再開される。例えば、車両がフェリーにより移動し、フェリー降船後に、GPSシステムが起動された場合、出発前のフェリー乗り場を示した地図上に自車マークが表示され、出発前のフェリー乗り場を基準に測位が行われる。このため、GPSシステムは車両の現在位置を速やかに確認できない。
【0006】
このような、GPSシステムにおける誤った表示状態は、GPS等による電波航法を用いたGPSシステムでは、暫くすると解消される。しかし、フェリーで到着した先がユーザにとって不案内である場所であるときには、その間、進行方向が確認できず大変不便となる。
【0007】
このような問題を解決する技術として、ラジオ信号を受信して、該ラジオ信号を用いて移動体の推測位置を割り出すようにしたGPS受信機が開示されている(例えば、特許文献1参照)。
【0008】
このGPS受信機によれば、GPS信号が捕捉できなくても、初期推測位置を設定することができ、電源投入時に人工衛星などの位置を捕捉する時間を短縮できる。
【特許文献1】特開平9−288165号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、上述した背景技術には以下の問題がある。
【0010】
GPSシステムでは、車両が停車し電源が落とされ、その後電源の投入が行われた場合、直前の停車位置を基準に測位が再開される。例えば、GPSシステムが搭載された車両がフェリーに乗船し、長距離輸送された場合、GPS受信装置には乗船時のデータが残っており、下船時には、乗船時の位置データに基づいて、自車位置が検出される。このため、現在位置を把握するまでに時間がかかる問題がある。
【0011】
本発明は、上述の点に鑑みてなされたものであり、自車位置の検出に要する時間を短縮することができるGPS受信装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記課題を解決するため、本発明のGPS受信装置は、複数の人工衛星から送信されるGPS信号を受信し、該GPS信号の測位情報より位置を算出するGPS受信装置において、所定の移動体から送信された情報を受信する受信手段と、前記情報から求められた位置を基準位置として初期サーチを行い、現在位置を特定する測位手段とを備えることを特徴の1つとする。
【0013】
このように構成することにより、所定の移動体、例えば船舶から送信された情報に基づいて、該情報から求められた位置を基準位置として初期サーチを行うことができる。
【0014】
また、前記受信手段は、船舶から送信された位置情報を受信し、前記測位手段は、前記位置情報に対応する位置を基準位置とするようにしてもよい。
【0015】
このように構成することにより、船舶から送信された位置情報に基づいて、初期サーチを行うことができる。
【0016】
また、前記受信手段は、FM多重放送により送信された位置情報を受信するようにしてもよい。
【0017】
このように構成することにより、VICS情報などFM多重放送により送信された位置情報に基づいて、初期サーチを行うことができる。
【0018】
また、前記受信手段は、所定の無線通信方式により送信された位置情報を受信するようにしてもよい。
【0019】
このように構成することにより、例えば携帯端末と同様な無線通信方式により送信された位置情報に基づいて、初期サーチを行うことができる。
【発明の効果】
【0020】
本発明の実施例によれば、自車位置の検出に要する時間を短縮することができるGPS受信装置を実現できる。
【発明を実施するための最良の形態】
【0021】
次に、本発明を実施するための最良の形態を、以下の実施例に基づき図面を参照しつつ説明する。
なお、実施例を説明するための全図において、同一機能を有するものは同一符号を用い、繰り返しの説明は省略する。
【0022】
本発明の実施例にかかるGPS受信装置100について、図1を参照して説明する。
【0023】
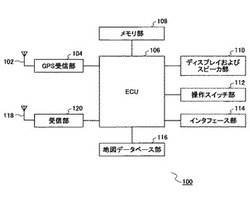
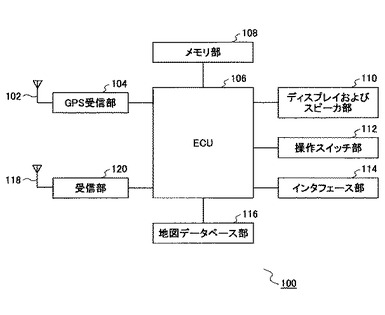
本実施例にかかるGPS受信装置100は、GPSアンテナ102と、GPSアンテナ102と接続されたGPS受信部104と、GPS受信部104と接続された測位手段としてのECU(電子制御回路)106と、ECU106と接続されたメモリ部108、ディスプレイおよびスピーカ部110、操作スイッチ部112、インタフェース部114、地図データベース部116および受信部120と、受信部120と接続されたアンテナ118とを備える。
【0024】
GPS衛星から送信された航法メッセージは、GPSアンテナ102を介してGPS受信部104に受信される。GPS受信部104は、該航法メッセージを解読し、ECU106に入力する。ECU106は、GPS受信部104により受信および解読された少なくとも4個のGPS衛星からの航法メッセージに含まれる時刻情報および軌道情報を用いて、各GPS衛星の位置と、各GPS衛星からGPS受信部104までの距離とを算出し、例えば三角測量の原理によってGPS受信部104の緯度、経度および高度を計測する。
【0025】
また、ECU106は、全GPS衛星の配置情報をメモリ部108に格納する。なお、ECU106はGPS受信開始時にはメモリ部108の格納情報から、どのGPS衛星の送信信号を受信するかをGPS受信部104に指示する。
【0026】
また、ECU106は、GPS衛星からの信号が受信できない場合においても自車両の位置を算出することができる。例えば、車輪速センサにより、自車両が単位時間にどのくらい移動したかを算出し、また車輪速センサと地磁気センサにより自車両がどのくらい進行方向を変化させたかを算出できる。この進行方向の変化量の検出は、ジャイロシステムによって行うようにしてもよい。そして、これらのセンサにより検出された相対移動量と、地図データベース部116に記憶された地図情報とを対応させ、地図上での自車両の位置がECU106により算出される。この地図情報と自車両の位置をディスプレイおよびスピーカ部110に重畳表示させ、ドライバーなどのユーザに報知する。
【0027】
また、ECU106は、検出された自車両の位置と地図情報との対比を常に行い(マップマッチング)、地図上の位置が妥当な位置か否かを判断する。たとえば、現在走行している場所には道路が全くなく自車両の走行軌跡と平行に道路があった場合、ECU106は、自車両位置をシフトさせ、現在位置が道路上になるように補正する。また、交差点を右左折したときにもその交差点位置から補正が行われる。このような補正によってGPSなどの位置検出精度を補償する。さらに、重要な情報をディスプレイおよびスピーカ部110により音声で報知し、ユーザがディスプレイ表示を見ていなくても確実に伝達できるように構成される。
【0028】
操作スイッチ部112は目的地の指定や表示の切換えなどの操作を行うためのものである。インタフェース部26は、例えば車載用ナビゲーション装置のカードスロットにPCカードが装着されたとき、PCカードのインタフェース部と接続されてデータの授受を行う。
【0029】
船舶200から送信された位置情報は、アンテナ118を介して受信部120に受信される。受信部120は、位置情報を解読し、ECU106に入力する。ECU106は、受信部120により受信および解読された位置情報に基づいて、受信部120の緯度、経度および高度を計測する。
【0030】
ここで、船舶200について、図2を参照して説明する。
【0031】
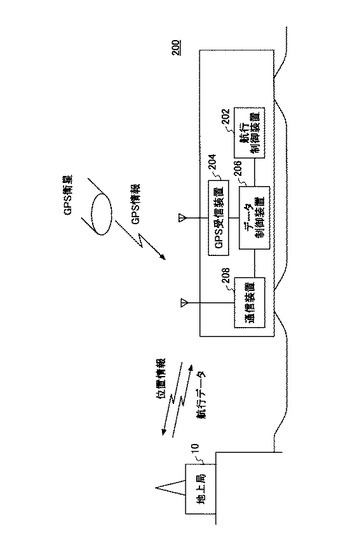
船舶200は、航行制御装置202と、航行制御装置202と接続されたデータ制御装置206と、データ制御装置206と接続されたGPS受信装置204および通信装置208とを備える。GPS受信装置204および通信装置208は、それぞれアンテナを備える。
【0032】
船舶200は、GPS受信装置204により自船舶位置を測位する。すなわち、自船舶200の現在の位置の緯度・経度を測位によって求める。この情報を位置情報とする。位置情報は時々刻々と変化する。この位置情報データはデータ制御装置206に入力され管理される。この位置情報は、通信装置208により地上局10および上述したGPS受信装置100に送信される。
【0033】
地上局ではこのデータを基に当該船舶200の方向・速度および目標位置を定め航行データとして船舶200に返信する。船舶200では地上局からの航行データを通信装置208により受信する。そしてこの航行データはデータ制御装置206に入力される。データ制御装置206は、航行データにしたがい、航行制御装置202に指令を行う。航行制御装置202では指令にしたがって、操舵あるいは運行の制御を行うことにより自船の向きや速度を変更し、目標位置に自船を導く。
【0034】
GPS受信装置100は、受信した位置情報に基づいて、受信部120の緯度、経度および高度を計測する。
【0035】
このようにすることにより、例えば、車両が船舶200、例えばフェリーにより移動し、フェリー降船後に、GPS受信装置が起動された場合、受信した位置情報に基づいて、現在地をサーチすることができる。このため、初期サーチ時間を短縮することができる。
【0036】
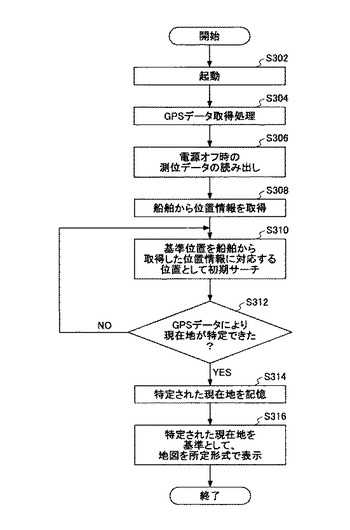
次に、車両がフェリーにより移動し、フェリー降船後に、搭載されたGPS受信装置が起動された場合に、現在地を取得して地図を表示する処理について、図3を参照して説明する。
【0037】
GPS受信装置100の起動が行われる(ステップS302)。
【0038】
次に、ECU106は、メモリ部108からGPSデータを取得する(ステップS304)。
【0039】
また、ECU106は、メモリ部108から電源オフ時の測位データを読み出す(ステップS306)。
【0040】
また、ECU106は、受信部120により、船舶200から位置情報を取得する(ステップS308)。
【0041】
次に、ECU106は、基準位置を、船舶200から取得した位置情報に対応する位置として、初期サーチを行う(ステップS310)。ここで、電源オフ時の測位データと船舶200から取得した位置情報とを比較して、その位置の違いが所定の範囲であるか否かを判断し、その違いが所定の範囲以上である場合に、船舶200から取得した位置情報に対応する位置として、初期サーチを行うようにしてもよい。
【0042】
次に、ECU106は、GPSデータにより現在地が特定できたか否かを判断する(ステップS312)。
【0043】
GPSデータにより現在地が特定できない場合(ステップS312:NO)、ステップS310に戻る。
【0044】
一方、GPSデータにより現在地が特定できた場合(ステップS312:YES)、ECU106は特定された現在地を、メモリ部108に記憶する(ステップS314)。
【0045】
次に、ECU106は、特定された現在地を基準として、ディスプレイおよびスピーカ部110のディスプレイに、地図を所定形式で表示する(ステップS316)。
【0046】
その後、現在地の取得、現在地の更新記憶および現在地を基準とした地図表示処理が、電源がオフされるまで行われる。
【0047】
位置情報は、船舶、例えばフェリーにより送信される。例えば、車両がフェリーにより移動し、フェリー降船後に、GPSシステムが起動された場合、該位置情報に対応する位置を基準位置として、初期サーチが行われる。このため、現在位置に近い位置からサーチを行うことができるため、初期サーチの時間を短縮できる。
【0048】
本実施例においては、GPS受信装置100を搭載した車両がフェリーから降船し、GPS受信装置100が起動された場合について説明したが、フェリー船内においてGPSシステムが起動される場合にも適用できる。
【0049】
また、本実施例において、船舶200からの位置情報は、船内の無線機からラジオ情報としてGPS受信装置に伝達するようにしてもよいし、携帯電話を利用してGPS受信装置に伝達するようにしてもよい。
【0050】
この場合、位置情報は、VICS(Vehicle Information and Communication System)により送信される道路交通情報(VICS情報)と同様にFM多重を利用して送信される。また、位置情報は、携帯端末と同様な無線通信方式により送信されるようにしてもよい。
【0051】
例えば、船舶200の通信装置208は、FM多重または携帯端末と同様な無線通信方式により、GPS受信装置204により測位された位置情報を送信する。
【0052】
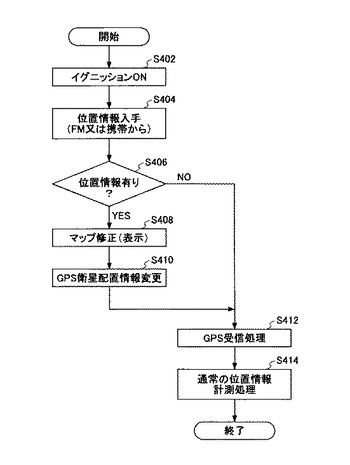
この場合の車両側に搭載されたGPS受信装置100の動作について、図4を参照して説明する。
【0053】
イグニッションがオンにされ、プログラムが開始される(ステップS402)。
【0054】
次に、位置情報を入手する(ステップS404)。例えば、フェリーは、FM多重または携帯端末と同様な無線通信方式により、GPS受信装置204により測位された位置情報を送信する。GPS受信装置100の受信部120は、フェリーから送信された信号を受信する。
【0055】
次に、ECU106は、受信信号に位置情報が含まれているか否かを判断する(ステップS406)。
【0056】
受信信号に位置情報が含まれている場合(ステップS406:YES)、ECU106は、基準位置を、位置情報に対応する位置として、初期サーチを行い、マップの修正を行う(ステップS408)。
【0057】
次に、ECU106は、メモリ部108に格納されたGPS衛星の配置情報の変更を行う(ステップS410)。
【0058】
一方、受信信号に位置情報が含まれていない場合(ステップS406:NO)およびステップS410において、GPS衛星の配置情報の変更が行われた場合、GPS受信部104は、GPS受信処理を行う(ステップS412)。
【0059】
次に、ECU106は、受信された航法メッセージに基づいて、通常の位置情報計測処理を行う。例えば、ECU106は、上述したように、GPS受信部104により受信および解読された少なくとも4個のGPS衛星からの航法メッセージに含まれる時刻情報および軌道情報を用いて、各GPS衛星の位置と、各GPS衛星からGPS受信部104までの距離とを算出し、GPS受信部104の緯度、経度および高度を計測する。
【0060】
本発明の実施例によれば、船舶、例えばフェリーから送信された位置情報を受信して、該位置情報を用いてGPS受信装置が搭載された移動体の推測位置を割り出すことができるので、初期サーチ時間を短縮することができる。
【産業上の利用可能性】
【0061】
本発明にかかるGPS受信装置は、測位システムに適用できる。
【図面の簡単な説明】
【0062】
【図1】本発明の一実施例にかかるGPS受信装置を示す部分ブロック図である。
【図2】船舶を示す部分ブロック図である。
【図3】本発明の一実施例にかかるGPS受信装置の動作を示すフロー図である。
【図4】本発明の一実施例にかかるGPS受信装置の動作を示すフロー図である。
【符号の説明】
【0063】
100 GPS受信装置
200 船舶
【技術分野】
【0001】
本発明は、車両などに搭載されるGPS受信装置に関する。
【背景技術】
【0002】
複数の人工衛星から送信されるGPS信号を受信して、移動体の位置や速度を計測するGPSシステムが普及している。
【0003】
このGPSシステムは、移動体に設けられたGPSアンテナによって少なくとも3個以上の人工衛星を捕捉し、該GPSアンテナが捕捉した天空に位置する3個以上の人工衛星から送信されるGPS信号を受信してこのGPSアンテナに接続されたGPS受信機により測位情報を算出し、緯度、経度、高度などの位置情報を得ることができる。
【0004】
また、これら複数個の人工衛星から送られたGPSデータに含まれる位置データ、時間データ、衛星データに基づいて、現在位置、高度および移動した距離を算出することができる。また、上記データに時間データを加えることにより移動スピードを算出することができる。
【0005】
ところで、GPSシステムが車両に搭載された場合、該車両が停車し、電源が落とされ、その後電源の投入が行われた場合、直前の停車位置を基準に測位が再開される。例えば、車両がフェリーにより移動し、フェリー降船後に、GPSシステムが起動された場合、出発前のフェリー乗り場を示した地図上に自車マークが表示され、出発前のフェリー乗り場を基準に測位が行われる。このため、GPSシステムは車両の現在位置を速やかに確認できない。
【0006】
このような、GPSシステムにおける誤った表示状態は、GPS等による電波航法を用いたGPSシステムでは、暫くすると解消される。しかし、フェリーで到着した先がユーザにとって不案内である場所であるときには、その間、進行方向が確認できず大変不便となる。
【0007】
このような問題を解決する技術として、ラジオ信号を受信して、該ラジオ信号を用いて移動体の推測位置を割り出すようにしたGPS受信機が開示されている(例えば、特許文献1参照)。
【0008】
このGPS受信機によれば、GPS信号が捕捉できなくても、初期推測位置を設定することができ、電源投入時に人工衛星などの位置を捕捉する時間を短縮できる。
【特許文献1】特開平9−288165号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、上述した背景技術には以下の問題がある。
【0010】
GPSシステムでは、車両が停車し電源が落とされ、その後電源の投入が行われた場合、直前の停車位置を基準に測位が再開される。例えば、GPSシステムが搭載された車両がフェリーに乗船し、長距離輸送された場合、GPS受信装置には乗船時のデータが残っており、下船時には、乗船時の位置データに基づいて、自車位置が検出される。このため、現在位置を把握するまでに時間がかかる問題がある。
【0011】
本発明は、上述の点に鑑みてなされたものであり、自車位置の検出に要する時間を短縮することができるGPS受信装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記課題を解決するため、本発明のGPS受信装置は、複数の人工衛星から送信されるGPS信号を受信し、該GPS信号の測位情報より位置を算出するGPS受信装置において、所定の移動体から送信された情報を受信する受信手段と、前記情報から求められた位置を基準位置として初期サーチを行い、現在位置を特定する測位手段とを備えることを特徴の1つとする。
【0013】
このように構成することにより、所定の移動体、例えば船舶から送信された情報に基づいて、該情報から求められた位置を基準位置として初期サーチを行うことができる。
【0014】
また、前記受信手段は、船舶から送信された位置情報を受信し、前記測位手段は、前記位置情報に対応する位置を基準位置とするようにしてもよい。
【0015】
このように構成することにより、船舶から送信された位置情報に基づいて、初期サーチを行うことができる。
【0016】
また、前記受信手段は、FM多重放送により送信された位置情報を受信するようにしてもよい。
【0017】
このように構成することにより、VICS情報などFM多重放送により送信された位置情報に基づいて、初期サーチを行うことができる。
【0018】
また、前記受信手段は、所定の無線通信方式により送信された位置情報を受信するようにしてもよい。
【0019】
このように構成することにより、例えば携帯端末と同様な無線通信方式により送信された位置情報に基づいて、初期サーチを行うことができる。
【発明の効果】
【0020】
本発明の実施例によれば、自車位置の検出に要する時間を短縮することができるGPS受信装置を実現できる。
【発明を実施するための最良の形態】
【0021】
次に、本発明を実施するための最良の形態を、以下の実施例に基づき図面を参照しつつ説明する。
なお、実施例を説明するための全図において、同一機能を有するものは同一符号を用い、繰り返しの説明は省略する。
【0022】
本発明の実施例にかかるGPS受信装置100について、図1を参照して説明する。
【0023】
本実施例にかかるGPS受信装置100は、GPSアンテナ102と、GPSアンテナ102と接続されたGPS受信部104と、GPS受信部104と接続された測位手段としてのECU(電子制御回路)106と、ECU106と接続されたメモリ部108、ディスプレイおよびスピーカ部110、操作スイッチ部112、インタフェース部114、地図データベース部116および受信部120と、受信部120と接続されたアンテナ118とを備える。
【0024】
GPS衛星から送信された航法メッセージは、GPSアンテナ102を介してGPS受信部104に受信される。GPS受信部104は、該航法メッセージを解読し、ECU106に入力する。ECU106は、GPS受信部104により受信および解読された少なくとも4個のGPS衛星からの航法メッセージに含まれる時刻情報および軌道情報を用いて、各GPS衛星の位置と、各GPS衛星からGPS受信部104までの距離とを算出し、例えば三角測量の原理によってGPS受信部104の緯度、経度および高度を計測する。
【0025】
また、ECU106は、全GPS衛星の配置情報をメモリ部108に格納する。なお、ECU106はGPS受信開始時にはメモリ部108の格納情報から、どのGPS衛星の送信信号を受信するかをGPS受信部104に指示する。
【0026】
また、ECU106は、GPS衛星からの信号が受信できない場合においても自車両の位置を算出することができる。例えば、車輪速センサにより、自車両が単位時間にどのくらい移動したかを算出し、また車輪速センサと地磁気センサにより自車両がどのくらい進行方向を変化させたかを算出できる。この進行方向の変化量の検出は、ジャイロシステムによって行うようにしてもよい。そして、これらのセンサにより検出された相対移動量と、地図データベース部116に記憶された地図情報とを対応させ、地図上での自車両の位置がECU106により算出される。この地図情報と自車両の位置をディスプレイおよびスピーカ部110に重畳表示させ、ドライバーなどのユーザに報知する。
【0027】
また、ECU106は、検出された自車両の位置と地図情報との対比を常に行い(マップマッチング)、地図上の位置が妥当な位置か否かを判断する。たとえば、現在走行している場所には道路が全くなく自車両の走行軌跡と平行に道路があった場合、ECU106は、自車両位置をシフトさせ、現在位置が道路上になるように補正する。また、交差点を右左折したときにもその交差点位置から補正が行われる。このような補正によってGPSなどの位置検出精度を補償する。さらに、重要な情報をディスプレイおよびスピーカ部110により音声で報知し、ユーザがディスプレイ表示を見ていなくても確実に伝達できるように構成される。
【0028】
操作スイッチ部112は目的地の指定や表示の切換えなどの操作を行うためのものである。インタフェース部26は、例えば車載用ナビゲーション装置のカードスロットにPCカードが装着されたとき、PCカードのインタフェース部と接続されてデータの授受を行う。
【0029】
船舶200から送信された位置情報は、アンテナ118を介して受信部120に受信される。受信部120は、位置情報を解読し、ECU106に入力する。ECU106は、受信部120により受信および解読された位置情報に基づいて、受信部120の緯度、経度および高度を計測する。
【0030】
ここで、船舶200について、図2を参照して説明する。
【0031】
船舶200は、航行制御装置202と、航行制御装置202と接続されたデータ制御装置206と、データ制御装置206と接続されたGPS受信装置204および通信装置208とを備える。GPS受信装置204および通信装置208は、それぞれアンテナを備える。
【0032】
船舶200は、GPS受信装置204により自船舶位置を測位する。すなわち、自船舶200の現在の位置の緯度・経度を測位によって求める。この情報を位置情報とする。位置情報は時々刻々と変化する。この位置情報データはデータ制御装置206に入力され管理される。この位置情報は、通信装置208により地上局10および上述したGPS受信装置100に送信される。
【0033】
地上局ではこのデータを基に当該船舶200の方向・速度および目標位置を定め航行データとして船舶200に返信する。船舶200では地上局からの航行データを通信装置208により受信する。そしてこの航行データはデータ制御装置206に入力される。データ制御装置206は、航行データにしたがい、航行制御装置202に指令を行う。航行制御装置202では指令にしたがって、操舵あるいは運行の制御を行うことにより自船の向きや速度を変更し、目標位置に自船を導く。
【0034】
GPS受信装置100は、受信した位置情報に基づいて、受信部120の緯度、経度および高度を計測する。
【0035】
このようにすることにより、例えば、車両が船舶200、例えばフェリーにより移動し、フェリー降船後に、GPS受信装置が起動された場合、受信した位置情報に基づいて、現在地をサーチすることができる。このため、初期サーチ時間を短縮することができる。
【0036】
次に、車両がフェリーにより移動し、フェリー降船後に、搭載されたGPS受信装置が起動された場合に、現在地を取得して地図を表示する処理について、図3を参照して説明する。
【0037】
GPS受信装置100の起動が行われる(ステップS302)。
【0038】
次に、ECU106は、メモリ部108からGPSデータを取得する(ステップS304)。
【0039】
また、ECU106は、メモリ部108から電源オフ時の測位データを読み出す(ステップS306)。
【0040】
また、ECU106は、受信部120により、船舶200から位置情報を取得する(ステップS308)。
【0041】
次に、ECU106は、基準位置を、船舶200から取得した位置情報に対応する位置として、初期サーチを行う(ステップS310)。ここで、電源オフ時の測位データと船舶200から取得した位置情報とを比較して、その位置の違いが所定の範囲であるか否かを判断し、その違いが所定の範囲以上である場合に、船舶200から取得した位置情報に対応する位置として、初期サーチを行うようにしてもよい。
【0042】
次に、ECU106は、GPSデータにより現在地が特定できたか否かを判断する(ステップS312)。
【0043】
GPSデータにより現在地が特定できない場合(ステップS312:NO)、ステップS310に戻る。
【0044】
一方、GPSデータにより現在地が特定できた場合(ステップS312:YES)、ECU106は特定された現在地を、メモリ部108に記憶する(ステップS314)。
【0045】
次に、ECU106は、特定された現在地を基準として、ディスプレイおよびスピーカ部110のディスプレイに、地図を所定形式で表示する(ステップS316)。
【0046】
その後、現在地の取得、現在地の更新記憶および現在地を基準とした地図表示処理が、電源がオフされるまで行われる。
【0047】
位置情報は、船舶、例えばフェリーにより送信される。例えば、車両がフェリーにより移動し、フェリー降船後に、GPSシステムが起動された場合、該位置情報に対応する位置を基準位置として、初期サーチが行われる。このため、現在位置に近い位置からサーチを行うことができるため、初期サーチの時間を短縮できる。
【0048】
本実施例においては、GPS受信装置100を搭載した車両がフェリーから降船し、GPS受信装置100が起動された場合について説明したが、フェリー船内においてGPSシステムが起動される場合にも適用できる。
【0049】
また、本実施例において、船舶200からの位置情報は、船内の無線機からラジオ情報としてGPS受信装置に伝達するようにしてもよいし、携帯電話を利用してGPS受信装置に伝達するようにしてもよい。
【0050】
この場合、位置情報は、VICS(Vehicle Information and Communication System)により送信される道路交通情報(VICS情報)と同様にFM多重を利用して送信される。また、位置情報は、携帯端末と同様な無線通信方式により送信されるようにしてもよい。
【0051】
例えば、船舶200の通信装置208は、FM多重または携帯端末と同様な無線通信方式により、GPS受信装置204により測位された位置情報を送信する。
【0052】
この場合の車両側に搭載されたGPS受信装置100の動作について、図4を参照して説明する。
【0053】
イグニッションがオンにされ、プログラムが開始される(ステップS402)。
【0054】
次に、位置情報を入手する(ステップS404)。例えば、フェリーは、FM多重または携帯端末と同様な無線通信方式により、GPS受信装置204により測位された位置情報を送信する。GPS受信装置100の受信部120は、フェリーから送信された信号を受信する。
【0055】
次に、ECU106は、受信信号に位置情報が含まれているか否かを判断する(ステップS406)。
【0056】
受信信号に位置情報が含まれている場合(ステップS406:YES)、ECU106は、基準位置を、位置情報に対応する位置として、初期サーチを行い、マップの修正を行う(ステップS408)。
【0057】
次に、ECU106は、メモリ部108に格納されたGPS衛星の配置情報の変更を行う(ステップS410)。
【0058】
一方、受信信号に位置情報が含まれていない場合(ステップS406:NO)およびステップS410において、GPS衛星の配置情報の変更が行われた場合、GPS受信部104は、GPS受信処理を行う(ステップS412)。
【0059】
次に、ECU106は、受信された航法メッセージに基づいて、通常の位置情報計測処理を行う。例えば、ECU106は、上述したように、GPS受信部104により受信および解読された少なくとも4個のGPS衛星からの航法メッセージに含まれる時刻情報および軌道情報を用いて、各GPS衛星の位置と、各GPS衛星からGPS受信部104までの距離とを算出し、GPS受信部104の緯度、経度および高度を計測する。
【0060】
本発明の実施例によれば、船舶、例えばフェリーから送信された位置情報を受信して、該位置情報を用いてGPS受信装置が搭載された移動体の推測位置を割り出すことができるので、初期サーチ時間を短縮することができる。
【産業上の利用可能性】
【0061】
本発明にかかるGPS受信装置は、測位システムに適用できる。
【図面の簡単な説明】
【0062】
【図1】本発明の一実施例にかかるGPS受信装置を示す部分ブロック図である。
【図2】船舶を示す部分ブロック図である。
【図3】本発明の一実施例にかかるGPS受信装置の動作を示すフロー図である。
【図4】本発明の一実施例にかかるGPS受信装置の動作を示すフロー図である。
【符号の説明】
【0063】
100 GPS受信装置
200 船舶
【特許請求の範囲】
【請求項1】
複数の人工衛星から送信されるGPS信号を受信し、該GPS信号の測位情報より位置を算出するGPS受信装置において、
所定の移動体から送信された情報を受信する受信手段と、
前記情報から求められた位置を基準位置として初期サーチを行い、現在位置を特定する測位手段と
を備えることを特徴とするGPS受信装置。
【請求項2】
請求項1に記載のGPS受信装置において、
前記受信手段は、船舶から送信された位置情報を受信し、
前記測位手段は、前記位置情報に対応する位置を基準位置とすることを特徴とするGPS受信装置。
【請求項3】
請求項1に記載のGPS受信装置において、
前記受信手段は、FM多重放送により送信された位置情報を受信することを特徴とするGPS受信装置。
【請求項4】
請求項1に記載のGPS受信装置において、
前記受信手段は、所定の無線通信方式により送信された位置情報を受信することを特徴とするGPS受信装置。
【請求項1】
複数の人工衛星から送信されるGPS信号を受信し、該GPS信号の測位情報より位置を算出するGPS受信装置において、
所定の移動体から送信された情報を受信する受信手段と、
前記情報から求められた位置を基準位置として初期サーチを行い、現在位置を特定する測位手段と
を備えることを特徴とするGPS受信装置。
【請求項2】
請求項1に記載のGPS受信装置において、
前記受信手段は、船舶から送信された位置情報を受信し、
前記測位手段は、前記位置情報に対応する位置を基準位置とすることを特徴とするGPS受信装置。
【請求項3】
請求項1に記載のGPS受信装置において、
前記受信手段は、FM多重放送により送信された位置情報を受信することを特徴とするGPS受信装置。
【請求項4】
請求項1に記載のGPS受信装置において、
前記受信手段は、所定の無線通信方式により送信された位置情報を受信することを特徴とするGPS受信装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−232567(P2007−232567A)
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願番号】特願2006−54583(P2006−54583)
【出願日】平成18年3月1日(2006.3.1)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願日】平成18年3月1日(2006.3.1)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]