
GPS測位システム及び方法

【課題】より精度の高い測位データを得ることが可能なGPS測位システム及び方法を提供する。
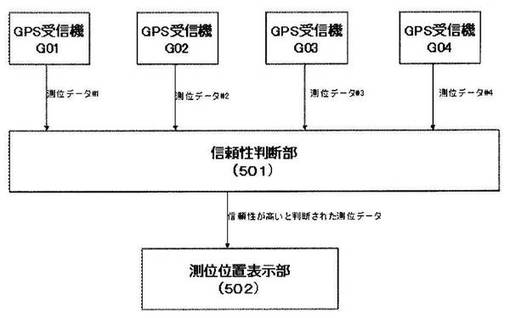
【解決手段】複数のGPS受信機G01〜G04によりGPS衛星からのGPS測位データを受信し、信頼度判断部501では各GPS受信機からのそれぞれのGPS測位データの信頼度を判断して最も信頼度の高い測位データを選択する。また、信頼度判断部501によって選択された最も信頼度の高いGPS受信機の測位データを測位位置表示部502で表示する。
【解決手段】複数のGPS受信機G01〜G04によりGPS衛星からのGPS測位データを受信し、信頼度判断部501では各GPS受信機からのそれぞれのGPS測位データの信頼度を判断して最も信頼度の高い測位データを選択する。また、信頼度判断部501によって選択された最も信頼度の高いGPS受信機の測位データを測位位置表示部502で表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GPS(Global Positioning System)を使用して位置を測定するGPS測位システム及び方法に関するものである。
【背景技術】
【0002】
従来、GPSを用いて位置を測定するシステムでは、GPSを1台使用するのが一般的である。その場合、使用者の身体がGPS電波を遮る場合があり、GPS衛星の位置によっては受信状態が悪い状況が起こることがある。また、都会のビルの中で使用者が歩行している場合等には、ビル等がGPS電波を遮ったり、マルチパスを作って受信状態の悪い状況が起きることがある。
【0003】
そこで、従来のGPS測位システムとしては、例えば、特許文献1乃至3等に記載されたものがある。特許文献1には、トロリーとパケットに各々GPS受信機を搭載し、これら2つのGPS受信機を通じて衛星からの電波を受信し、各々トロリーとパケットの現在位置を測位することが記載されている。
【0004】
また、特許文献2には、GPSを搭載する携帯機器において4衛星以上捕捉できた場合には4台以上の衛星を使用して位置計算を行う3次元測位と、3台の衛星しか捕捉できない環境下で位置計算を2次元測位と、のいずれかでGPS測位を行うことが記載されている。
【0005】
更に、特許文献3には、移動通信端末においてGPS測位の測位状態、GPS衛星の捕捉状態、GPS衛星の捕捉数のいずれかに基づいてGPS測位を継続させるか否かを判定することが記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−240372号公報
【特許文献2】特開2005−147720号公報
【特許文献3】特開2009−031115号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
特許文献1のものは、位置測定の対象物のトロリーやパケットにそれぞれGPS受信機を搭載し、2つのGPS受信機を通じて正確に対象物の現在位置の測定を行うというものである。
【0008】
また、特許文献2のものは、1台のGPSを有する携帯機器において水平位置精度の劣化を防ぐため、衛星捕捉数に応じて3次元測位と2次元測位の測位モードを切り替えるものである。更に、特許文献3のものは、GPS測位が可能となりうる場合に測位が中止されることを防止するため、GPS測位の測位状態、GPS衛星の捕捉状態、GPS衛星の捕捉数のいずれかに基づいてGPS測位を継続させるか否かを判定するものである。
【0009】
このように引用文献1乃至3のものは、GPSを用いて測位を行うものであるが、上述のような使用者の身体がGPS電波を遮ったり、都会のビル等がGPS電波を遮ったり、或いはマルチパスを作る等して受信状態の悪い状況下で精度の高い測位データを得るには有効ではない。
【0010】
本発明の目的は、より精度の高い測位データを得ることが可能なGPS測位システム及び方法を提供することにある。
【課題を解決するための手段】
【0011】
本発明に係るGPS測位システムは、複数のGPS受信機を有し、その複数のGPS受信機によりGPS衛星からのGPS測位データをそれぞれ受信し、選択手段によって複数のGPS受信機からのそれぞれのGPS測位データの信頼度を判断して、最も信頼度の高い測位データを選択する。
【0012】
また、本発明は、複数のGPS受信機を有し、その複数のGPS受信機によりGPS衛星からのGPS測位データをそれぞれ受信し、衛星捕捉数計測手段により複数のGPS受信機のそれぞれの測位データからGPS衛星の捕捉数を計測する。そして、選択手段により複数のGPS受信機のうちGPS衛星の捕捉数が最も多いGPS受信機の測位データを選択する。
【0013】
また、本発明に係るGPS測位システムは、複数のGPS受信機を有し、その複数のGPS受信機によりGPS衛星からのGPS測位データをそれぞれ受信し、衛星捕捉数計測手段により複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する。一方、複数のGPS受信機にはそれぞれ各GPS受信機の周辺の光強度を検出する光センサが装着されている。そして、信頼度計算手段により衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と各GPS受信機に装着された光センサの光強度に基づいて各GPS受信機の測位データの信頼度を計算し、選択手段により計算された複数のGPS受信機のうち最も信頼度の高いGPS受信機の測位データを選択する。
【0014】
また、本発明に係るGPS測位システムは、複数のGPS受信機を有し、その複数のGPS受信機によりGPS衛星からのGPS測位データをそれぞれ受信し、衛星捕捉数計測手段により複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する。一方、複数のGPS受信機にはそれぞれ各GPS受信機と周辺との距離を計測する距離計測手段が装着されている。そして、信頼度計算手段により衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と各GPS受信機に装着された距離計測手段の距離情報に基づいて各GPS受信機の測位データの信頼度を計算し、選択手段により計算された各GPS受信機の信頼度のうち最も信頼度の高いGPS受信機の測位データを選択する。
【0015】
また、本発明に係るGPS測位方法は、複数のGPS受信機によりGPS衛星からの測位データを受信し、選択手段により複数のGPS受信機のそれぞれの測位データのうち最も信頼度の高い測位データを選択する。
【0016】
また、本発明に係るGPS測位方法は、複数のGPS受信機よりGPS衛星からの測位データを受信し、衛星捕捉数計測手段により複数のGPS受信機のそれぞれの測位データからGPS衛星の捕捉数を計測し、選択手段により複数のGPS受信機のうちGPS衛星の捕捉数が最も多いGPS受信機の測位データを選択する。
【0017】
また、本発明に係るGPS測位方法は、複数のGPS受信機によりGPS衛星からの測位データを受信し、衛星捕捉数計測手段により複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する。一方、複数のGPS受信機にそれぞれ装着された光センサにより各GPS受信機の周辺の光強度を検出し、信頼度計算手段により計測された各GPS受信機の捕捉衛星数と検出された各GPS受信機の周辺の光強度に基づいて各GPS受信機の測位データの信頼度を計算し、選択手段により計算された各GPS受信機の信頼度のうち最も信頼度の高いGPS受信機の測位データを選択する。
【0018】
また、本発明に係るGPS測位システムは、複数のGPS受信機によりGPS衛星からの測位データを受信し、衛星捕捉数計測手段により複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する。一方、複数のGPS受信機にそれぞれ装着された距離計測手段により各GPS受信機と周辺との距離を計測し、信頼度計算手段により計測された各GPS受信機の衛星捕捉数と距離情報に基づいて各GPS受信機の測位データの信頼度を計算し、選択手段より計算された各GPS受信機のうち最も信頼度の高いGPS受信機の測位データを選択する。
【発明の効果】
【0019】
本発明によれば、複数のGPS受信機の各測位データから最も信頼度の高い測位データを選択することにより、使用者の体等によるGPS電波の影或いはビルの影等の悪影響を軽減でき、より高精度の測位が可能となる。
【図面の簡単な説明】
【0020】
【図1】本発明に係るGPS測位システムの第1の実施形態を示すブロック図である。
【図2】複数のGPS受信機の装着例を示す図である。
【図3】図2のGPS受信機の装着状態でGPS電波の飛来方向が前方の場合の影になるGPS受信機を説明する図である。
【図4】図2のGPS受信機の装着状態でGPS電波の飛来方向が斜右前方の場合の影になるGPS受信機を説明する図である。
【図5】図2のGPS受信機の装着状態でGPS電波の飛来方向が右方向の場合の影になるGPS受信機を説明する図である。
【発明を実施するための形態】
【0021】
次に、発明を実施するための形態について図面を参照して詳細に説明する。
【0022】
(第1の実施形態)
図1は本発明に係るGPS測位システムの第1の実施形態を示すブロック図である。図中G01、G02、G03、G04はGPS衛星(不図示)からのGPS測位データを受信するGPS受信機である。GPS受信機G01〜G04からのGPS測位データは信頼性判断部501に送信される。
【0023】
信頼性判断部501は4つのGPS受信機G01〜G04からの測位データの信頼性を判断し、最も高精度と判断した測位データを選択出力する。測位位置表示部502は信頼性判断部501から送信された測位データを表示する。測位位置表示部502には、後で地図上に測位位置をプロットするために測位位置をメモリ上に記録する機能を持たせても良い。
【0024】
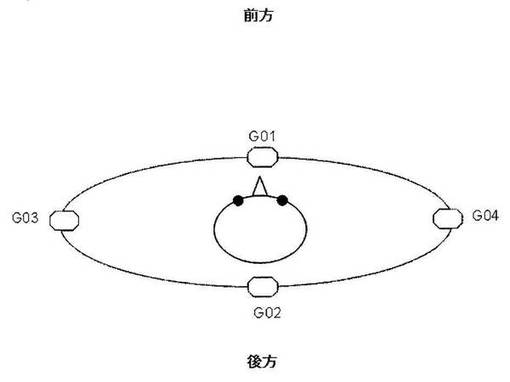
図2は使用者に4つのGPS受信機G01〜G04を装着した例を示す。なお、図2は使用者の上方位置から見た図である。図2の例では、使用者の前後(ベルト等)にGPS受信機G01、G02が装着され、使用者の両肩にGPS受信機G03、G04が装着されている。なお、図2は4つのGPS受信機の装着例を示すもので、本発明はこれに限ることはない。
【0025】
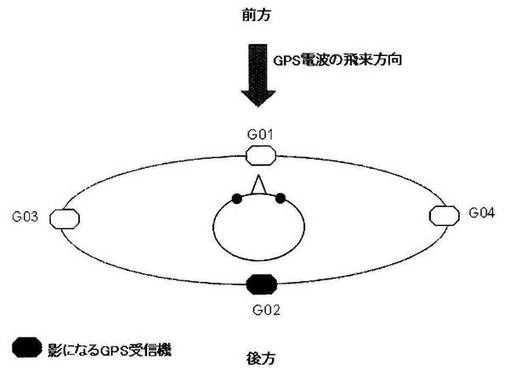
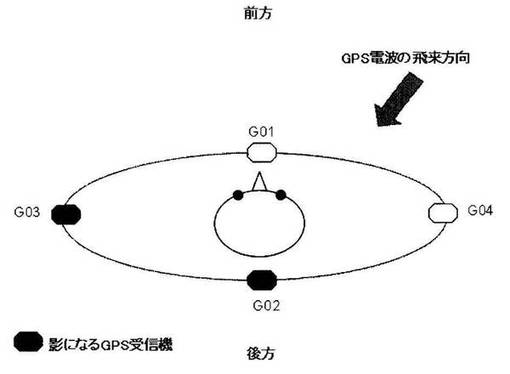
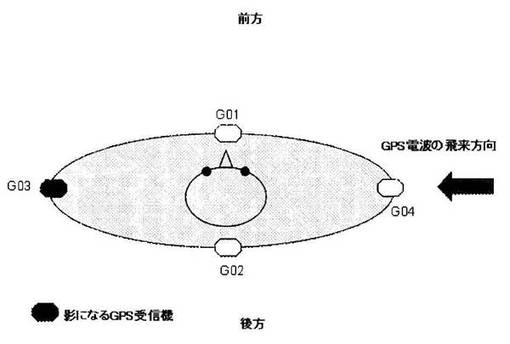
図3、図4、図5はGPS電波の飛来方向により受信できない(影になる)GPS受信機の位置を示す。図3に示すようにGPS電波の飛来方向が矢印で示す前方の場合には、使用者の後に装着されたGPS受信機G02が影になるためGPS電波を受信できない。また、図4に示すようにGPS電波の飛来方向が矢印で示す斜め右前方の場合には、使用者の後に装着されたGPS受信機G02と左肩に装着されたGPS受信機G03が影になるためGPS電波を受信できない。
【0026】
更に、図5に示すようにGPS電波の飛来方向が矢印で示すように右方向の場合には、使用者の左肩に装着されたGPS受信機G03がGPS電波を受信できない。このように使用者の移動又はGPS衛星の位置等によりGPS電波の飛来方向が変化するためGPS電波を受信できないGPS受信機がある。
【0027】
次に、本発明の実施例の動作について説明する。図1に示すように4つのGPS受信機G01〜G04で測位されたGPS測位データは、それぞれ信頼性判断部501に送信される。信頼性判断部501は各GPS受信機の測位データから各GPS受信機の信頼度を判断し、最も信頼度の高いGPS受信機の測位データを測位位置表示部502に送信する。測位位置表示部502はLCD等の表示部に位置を表示すると共に、図示しないメモリに記録する。
【0028】
次に、信頼性判断部の信頼性判断方法を説明する。まず、信頼性判断部501は4つのGPS受信機G01〜G04から入力された4つの測位データからそれぞれの捕捉衛星数を抽出する。その中から捕捉衛星数が最大のGPS受信機の測位データを最も信頼度が高いと判断し、測位位置表示部502に送信する。例えば、図3に示すようにGPS電波の飛来方向が前方である場合には、使用者の前面に装着されたGPS受信機G01が最も捕捉衛星数が多くなる。
【0029】
また、図4に示す例では、GPS受信機G01又はG04が捕捉衛星数が最も多くなり、図5に示す例では、GPS受信機G04が最も捕捉衛星数が多くなる。信頼性判断部501はこのようにして捕捉衛星数が最大のGPS受信機の測位データを最も信頼度が高いと判断する。捕捉衛星数が同数のGPS受信機が複数ある場合にはどのGPS受信機を選択しても良い。
【0030】
本実施形態では、色々な方向からのGPS電波を受信するため、複数のGPS受信機を使用者に装着する。例えば、4つのGPS受信機を使用者の左右の両肩、使用者のベルト等に前後に装着する。そのため、使用者の身体がGPS電波を遮る状況を軽減することが可能となり、前後左右4方向の4つのGPS受信機からGPS測位データが同時に得られる。
【0031】
また、各GPS受信機の測位データからGPS受信機が捕捉している衛星数が得られるため、捕捉衛星数が最も多いGPS受信機の測位データが最も信頼性が高いと判断してその測位データを採用することにより、従来に比べて精度の高い測位データを得ることが可能となる。更に、衛星の位置状況、使用者の進行方向、使用者の周辺状況(ビル、木立等のGPS電波を遮るものの状況)において信頼性の高いGPS受信機の測位データ(4つのうちの1つ)が得られ、指向性のあるアンテナを一番受信状態が良くなるように振ったと同様の効果が得られる。
【0032】
なお、本発明は、4つのGPS受信機を用いた例を示したが、本発明はこれに限ることなく、それ以上又はそれ以下であっても良い。また、各GPS受信機G01〜G04側で測位データを記録し、後処理として信頼性判断部501や測位位置表示部502と同様の処理をPC等で行っても構わない。その場合には、特殊な装置を使わずに4つのGPS受信機を用意するだけで高精度の測位が可能となるため、低コストで高精度の測位が実現可能となる。
【0033】
(第2の実施形態)
次に、本発明の第2の実施形態として各GPS受信機G01〜G04に周辺の光強度を検出する光センサを装着しても良い。具体的には、各GPS受信機からGPS測位データの他に光強度を入力として信頼性判断部501に送信し、信頼性判断部501ではそれぞれの測位データに対して以下の計算式で信頼度を計算し、一番信頼度が大きいと判断したGPS受信機の測位データを選択する。その場合の計算式には色々なものが考えられ、これは一例に過ぎない。
【0034】
信頼度=捕捉衛星数×光強度
このように各GPS受信機に光センサを装着して光の強度を計測することにより、GPS電波の飛来方向の見通しを推測することができる。即ち、光強度が大きいと飛来方向の見通しが良く、信頼度が高いと判断できる。また、光強度に時間的なゆらぎがある場合には、木漏れ陽の下と判断して信頼度を下げる判断をする。捕捉衛星数は多いが光強度が小さい場合には、マルチパスの影響があると判断する等、捕捉衛星数だけに頼るよりも精度の高い判断が可能となる。
【0035】
(第3の実施形態)
次に、本発明の第3の実施形態として各GPS受信機に周辺との距離(GPS受信機の周辺に存在する物体等)を計測する超音波距離計等を装着しても良い。即ち、測位データの他に周辺との距離情報を入力として信頼性判断部501に送信し、信頼性判断部501ではそれぞれの測位データに対して以下の式で信頼度を計算し、一番信頼度が大きいと判断したGPS受信機の測位データを選択する。この場合も計算式には色々なものが考えられ、これは一例にすぎない。計測不能の場合には距離を無限大として(1/距離)をゼロと計算する。
【0036】
信頼度=捕捉衛星数×(1−1/距離)
このように超音波距離計を各GPS受信機に装着してGPS受信機とその周辺との距離を計測し、計測不能(距離が無限大)なら見通しが良いと判断する。また、距離を計測できた場合には、距離が短い方がマルチパスの確率が高いと判断することにより捕捉衛星数だけに頼るよりも精度の高い判断が可能となる。
【0037】
なお、以上の実施形態のGPS測位システムは、ハードウェアによっても実現できるが、コンピュータをその情報処理システムとして機能させるためのプログラムをコンピュータがコンピュータ読み取り可能な記録媒体から読み込んで実行することによっても実現できる。また、以上の実施形態のGPS測位方法は、ハードウェアによっても実現できるが、コンピュータにその方法を実行させるためのプログラムをコンピュータがコンピュータ読み取り可能な記録媒体から読み込んで実行することによっても実現できる。
【0038】
また、上記実施形態の一部又は全部は、以下の付記のようにも記載されうるが、以下には限らない。
【0039】
(付記1)複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データのうち最も信頼度の高い測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【0040】
(付記2)複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データからGPS衛星の捕捉数を計測し、前記複数のGPS受信機のうち前記GPS衛星の捕捉数が最も多いGPS受信機の測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【0041】
(付記3)複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測手段と、
前記複数のGPS受信機にそれぞれ装着され、各GPS受信機の周辺の光強度を検出する光センサと、
前記衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と前記各GPS受信機に装着された光センサの光強度に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算手段と、
前記計算された複数のGPS受信機のうち最も信頼度の高いGPS受信機の測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【0042】
(付記4)前記信頼度計算手段は、信頼度=GPS受信機の衛星捕捉数×光センサの光強度によってGPS受信機の測位データの信頼度を計算することを特徴とする付記3に記載のGPS測位システム。
【0043】
(付記5)複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測手段と、
前記複数のGPS受信機にそれぞれ装着され、各GPS受信機と周辺との距離を計測する距離計測手段と、
前記衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と前記各GPS受信機に装着された距離計測手段の距離情報に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算手段と、
前記計算された各GPS受信機の信頼度のうち最も信頼度の高いGPS受信機の測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【0044】
(付記6)前記信頼度計算手段は、GPS受信機の衛星捕捉数×(1−1/距離計測手段の距離情報)によってGPS受信機の測位データの信頼度を計算することを特徴とする付記5に記載のGPS測位システム。
【0045】
(付記7)前記選択手段によって選択されたGPS受信機の測位データを採用して測位位置を表示する表示手段を有することを特徴とする付記1ないし6の何れか1項に記載のGPS測位システム。
【0046】
(付記8)複数のGPS受信機によりGPS衛星からの測位データを受信する工程と、
選択手段により前記複数のGPS受信機のそれぞれの測位データのうち最も信頼度の高い測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【0047】
(付記9)複数のGPS受信機よりGPS衛星からの測位データを受信する工程と、
選択手段により前記複数のGPS受信機のそれぞれの測位データからGPS衛星の捕捉数を計測し、前記複数のGPS受信機のうち前記GPS衛星の捕捉数が最も多いGPS受信機の測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【0048】
(付記10)複数のGPS受信機によりGPS衛星からの測位データを受信する工程と、
衛星捕捉数計測手段により前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測工程と、
前記複数のGPS受信機にそれぞれ装着された光センサにより各GPS受信機の周辺の光強度を検出する検出工程と、
信頼度計算手段により前記衛星捕捉数計測工程で計測された各GPS受信機の捕捉衛星数と前記検出工程で検出された各GPS受信機の周辺の光強度に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算工程と、
選択手段により前記信頼度計算工程で計算された各GPS受信機の信頼度のうち最も信頼度の高いGPS受信機の測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【0049】
(付記11)
前記信頼度計算工程において、信頼度=GPS受信機の衛星捕捉数×光センサの光強度によってGPS受信機の測位データの信頼度を計算することを特徴とする付記10に記載のGPS測位方法。
【0050】
(付記12)複数のGPS受信機によりGPS衛星からの測位データを受信する工程と、
衛星捕捉数計測手段により前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測工程と、
前記複数のGPS受信機にそれぞれ装着された距離計測手段により各GPS受信機と周辺との距離を計測する距離計測工程と、
信頼度計算手段により前記衛星捕捉数計測工程で計測された各GPS受信機の衛星捕捉数と前記距離計測工程で計測された距離情報に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算工程と、
選択手段より前記信頼度計算工程で計算された各GPS受信機のうち最も信頼度の高いGPS受信機の測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【0051】
(付記13)前記信頼度計算工程において、GPS受信機の衛星捕捉数×(1−1/距離計測手段の距離情報)によってGPS受信機の測位データの信頼度を計算することを特徴とする付記12に記載のGPS測位方法。
【0052】
(付記14)前記選択工程によって選択されたGPS受信機の測位データを採用して測位位置を表示する表示工程を含むことを特徴とする付記8ないし13の何れか1項に記載のGPS測位方法。
【0053】
(付記15)複数のGPS受信機を有し、前記複数のGPS受信機により受信した測位データの中から信頼度の最も高い測位データを採用するGPS測位システムのプログラムであって、
前記GPS測位システムを、
前記複数のGPS受信機のそれぞれの測位データのうち最も信頼度の高い測位データを選択する選択手段と、
して機能させるためのプログラム。
【0054】
(付記16)複数のGPS受信機を有し、前記複数のGPS受信機により受信した測位データの中から信頼度の最も高い測位データを採用するGPS測位システムのプログラムであって、
前記GPS測位システムを、
前記複数のGPS受信機のそれぞれの測位データからGPS衛星の捕捉数を計測し、前記複数のGPS受信機のうち前記GPS衛星の捕捉数が最も多いGPS受信機の測位データを選択する選択手段と、
して機能させるためのプログラム。
【0055】
(付記17)複数のGPS受信機を有し、前記複数のGPS受信機により受信した測位データの中から信頼度の最も高い測位データを採用するGPS測位システムのプログラムであって、
前記GPS測位システムを、
前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測手段と、
前記衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と各GPS受信機に装着された光センサの光強度に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算手段と、
前記計算された複数のGPS受信機のうち最も信頼度の高いGPS受信機の測位データを選択する選択手段と、
して機能させるためのプログラム。
【0056】
(付記18)前記信頼度計算手段は、信頼度=GPS受信機の衛星捕捉数×光センサの光強度によってGPS受信機の測位データの信頼度を計算することを特徴とする付記17に記載のプログラム。
【0057】
(付記19)複数のGPS受信機を有し、前記複数のGPS受信機により受信した測位データの中から信頼度の最も高い測位データを採用するGPS測位システムのプログラムであって、
前記GPS測位システムを、
前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測手段と、
前記衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と各GPS受信機に装着された距離計測手段の距離情報に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算手段と、
前記計算された各GPS受信機の信頼度のうち最も信頼度の高いGPS受信機の測位データを選択する選択手段と、
して機能させるためのプログラム。
【0058】
(付記20)前記信頼度計算手段は、GPS受信機の衛星捕捉数×(1−1/距離計測手段の距離情報)によってGPS受信機の測位データの信頼度を計算することを特徴とする付記19に記載のプログラム。
【0059】
(付記21)前記選択手段によって選択されたGPS受信機の測位データを採用して測位位置を表示させる表示手段として機能させることを特徴とする付記15ないし20の何れか1項に記載のプログラム。
【産業上の利用可能性】
【0060】
本発明は、使用者の位置情報を高精度化できるので、初めての土地での道案内システム等に好適に使用できる。また、クレーン車等自分自身のクレーンでGPS電波を遮る可能性のある移動体に対して歩行者と同様に複数のGPS受信機を搭載することにより測位精度を高精度化できる。
【符号の説明】
【0061】
501 信頼性判断部
502 測位位置表示部
G01〜G04 GPS受信機
【技術分野】
【0001】
本発明は、GPS(Global Positioning System)を使用して位置を測定するGPS測位システム及び方法に関するものである。
【背景技術】
【0002】
従来、GPSを用いて位置を測定するシステムでは、GPSを1台使用するのが一般的である。その場合、使用者の身体がGPS電波を遮る場合があり、GPS衛星の位置によっては受信状態が悪い状況が起こることがある。また、都会のビルの中で使用者が歩行している場合等には、ビル等がGPS電波を遮ったり、マルチパスを作って受信状態の悪い状況が起きることがある。
【0003】
そこで、従来のGPS測位システムとしては、例えば、特許文献1乃至3等に記載されたものがある。特許文献1には、トロリーとパケットに各々GPS受信機を搭載し、これら2つのGPS受信機を通じて衛星からの電波を受信し、各々トロリーとパケットの現在位置を測位することが記載されている。
【0004】
また、特許文献2には、GPSを搭載する携帯機器において4衛星以上捕捉できた場合には4台以上の衛星を使用して位置計算を行う3次元測位と、3台の衛星しか捕捉できない環境下で位置計算を2次元測位と、のいずれかでGPS測位を行うことが記載されている。
【0005】
更に、特許文献3には、移動通信端末においてGPS測位の測位状態、GPS衛星の捕捉状態、GPS衛星の捕捉数のいずれかに基づいてGPS測位を継続させるか否かを判定することが記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−240372号公報
【特許文献2】特開2005−147720号公報
【特許文献3】特開2009−031115号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
特許文献1のものは、位置測定の対象物のトロリーやパケットにそれぞれGPS受信機を搭載し、2つのGPS受信機を通じて正確に対象物の現在位置の測定を行うというものである。
【0008】
また、特許文献2のものは、1台のGPSを有する携帯機器において水平位置精度の劣化を防ぐため、衛星捕捉数に応じて3次元測位と2次元測位の測位モードを切り替えるものである。更に、特許文献3のものは、GPS測位が可能となりうる場合に測位が中止されることを防止するため、GPS測位の測位状態、GPS衛星の捕捉状態、GPS衛星の捕捉数のいずれかに基づいてGPS測位を継続させるか否かを判定するものである。
【0009】
このように引用文献1乃至3のものは、GPSを用いて測位を行うものであるが、上述のような使用者の身体がGPS電波を遮ったり、都会のビル等がGPS電波を遮ったり、或いはマルチパスを作る等して受信状態の悪い状況下で精度の高い測位データを得るには有効ではない。
【0010】
本発明の目的は、より精度の高い測位データを得ることが可能なGPS測位システム及び方法を提供することにある。
【課題を解決するための手段】
【0011】
本発明に係るGPS測位システムは、複数のGPS受信機を有し、その複数のGPS受信機によりGPS衛星からのGPS測位データをそれぞれ受信し、選択手段によって複数のGPS受信機からのそれぞれのGPS測位データの信頼度を判断して、最も信頼度の高い測位データを選択する。
【0012】
また、本発明は、複数のGPS受信機を有し、その複数のGPS受信機によりGPS衛星からのGPS測位データをそれぞれ受信し、衛星捕捉数計測手段により複数のGPS受信機のそれぞれの測位データからGPS衛星の捕捉数を計測する。そして、選択手段により複数のGPS受信機のうちGPS衛星の捕捉数が最も多いGPS受信機の測位データを選択する。
【0013】
また、本発明に係るGPS測位システムは、複数のGPS受信機を有し、その複数のGPS受信機によりGPS衛星からのGPS測位データをそれぞれ受信し、衛星捕捉数計測手段により複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する。一方、複数のGPS受信機にはそれぞれ各GPS受信機の周辺の光強度を検出する光センサが装着されている。そして、信頼度計算手段により衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と各GPS受信機に装着された光センサの光強度に基づいて各GPS受信機の測位データの信頼度を計算し、選択手段により計算された複数のGPS受信機のうち最も信頼度の高いGPS受信機の測位データを選択する。
【0014】
また、本発明に係るGPS測位システムは、複数のGPS受信機を有し、その複数のGPS受信機によりGPS衛星からのGPS測位データをそれぞれ受信し、衛星捕捉数計測手段により複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する。一方、複数のGPS受信機にはそれぞれ各GPS受信機と周辺との距離を計測する距離計測手段が装着されている。そして、信頼度計算手段により衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と各GPS受信機に装着された距離計測手段の距離情報に基づいて各GPS受信機の測位データの信頼度を計算し、選択手段により計算された各GPS受信機の信頼度のうち最も信頼度の高いGPS受信機の測位データを選択する。
【0015】
また、本発明に係るGPS測位方法は、複数のGPS受信機によりGPS衛星からの測位データを受信し、選択手段により複数のGPS受信機のそれぞれの測位データのうち最も信頼度の高い測位データを選択する。
【0016】
また、本発明に係るGPS測位方法は、複数のGPS受信機よりGPS衛星からの測位データを受信し、衛星捕捉数計測手段により複数のGPS受信機のそれぞれの測位データからGPS衛星の捕捉数を計測し、選択手段により複数のGPS受信機のうちGPS衛星の捕捉数が最も多いGPS受信機の測位データを選択する。
【0017】
また、本発明に係るGPS測位方法は、複数のGPS受信機によりGPS衛星からの測位データを受信し、衛星捕捉数計測手段により複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する。一方、複数のGPS受信機にそれぞれ装着された光センサにより各GPS受信機の周辺の光強度を検出し、信頼度計算手段により計測された各GPS受信機の捕捉衛星数と検出された各GPS受信機の周辺の光強度に基づいて各GPS受信機の測位データの信頼度を計算し、選択手段により計算された各GPS受信機の信頼度のうち最も信頼度の高いGPS受信機の測位データを選択する。
【0018】
また、本発明に係るGPS測位システムは、複数のGPS受信機によりGPS衛星からの測位データを受信し、衛星捕捉数計測手段により複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する。一方、複数のGPS受信機にそれぞれ装着された距離計測手段により各GPS受信機と周辺との距離を計測し、信頼度計算手段により計測された各GPS受信機の衛星捕捉数と距離情報に基づいて各GPS受信機の測位データの信頼度を計算し、選択手段より計算された各GPS受信機のうち最も信頼度の高いGPS受信機の測位データを選択する。
【発明の効果】
【0019】
本発明によれば、複数のGPS受信機の各測位データから最も信頼度の高い測位データを選択することにより、使用者の体等によるGPS電波の影或いはビルの影等の悪影響を軽減でき、より高精度の測位が可能となる。
【図面の簡単な説明】
【0020】
【図1】本発明に係るGPS測位システムの第1の実施形態を示すブロック図である。
【図2】複数のGPS受信機の装着例を示す図である。
【図3】図2のGPS受信機の装着状態でGPS電波の飛来方向が前方の場合の影になるGPS受信機を説明する図である。
【図4】図2のGPS受信機の装着状態でGPS電波の飛来方向が斜右前方の場合の影になるGPS受信機を説明する図である。
【図5】図2のGPS受信機の装着状態でGPS電波の飛来方向が右方向の場合の影になるGPS受信機を説明する図である。
【発明を実施するための形態】
【0021】
次に、発明を実施するための形態について図面を参照して詳細に説明する。
【0022】
(第1の実施形態)
図1は本発明に係るGPS測位システムの第1の実施形態を示すブロック図である。図中G01、G02、G03、G04はGPS衛星(不図示)からのGPS測位データを受信するGPS受信機である。GPS受信機G01〜G04からのGPS測位データは信頼性判断部501に送信される。
【0023】
信頼性判断部501は4つのGPS受信機G01〜G04からの測位データの信頼性を判断し、最も高精度と判断した測位データを選択出力する。測位位置表示部502は信頼性判断部501から送信された測位データを表示する。測位位置表示部502には、後で地図上に測位位置をプロットするために測位位置をメモリ上に記録する機能を持たせても良い。
【0024】
図2は使用者に4つのGPS受信機G01〜G04を装着した例を示す。なお、図2は使用者の上方位置から見た図である。図2の例では、使用者の前後(ベルト等)にGPS受信機G01、G02が装着され、使用者の両肩にGPS受信機G03、G04が装着されている。なお、図2は4つのGPS受信機の装着例を示すもので、本発明はこれに限ることはない。
【0025】
図3、図4、図5はGPS電波の飛来方向により受信できない(影になる)GPS受信機の位置を示す。図3に示すようにGPS電波の飛来方向が矢印で示す前方の場合には、使用者の後に装着されたGPS受信機G02が影になるためGPS電波を受信できない。また、図4に示すようにGPS電波の飛来方向が矢印で示す斜め右前方の場合には、使用者の後に装着されたGPS受信機G02と左肩に装着されたGPS受信機G03が影になるためGPS電波を受信できない。
【0026】
更に、図5に示すようにGPS電波の飛来方向が矢印で示すように右方向の場合には、使用者の左肩に装着されたGPS受信機G03がGPS電波を受信できない。このように使用者の移動又はGPS衛星の位置等によりGPS電波の飛来方向が変化するためGPS電波を受信できないGPS受信機がある。
【0027】
次に、本発明の実施例の動作について説明する。図1に示すように4つのGPS受信機G01〜G04で測位されたGPS測位データは、それぞれ信頼性判断部501に送信される。信頼性判断部501は各GPS受信機の測位データから各GPS受信機の信頼度を判断し、最も信頼度の高いGPS受信機の測位データを測位位置表示部502に送信する。測位位置表示部502はLCD等の表示部に位置を表示すると共に、図示しないメモリに記録する。
【0028】
次に、信頼性判断部の信頼性判断方法を説明する。まず、信頼性判断部501は4つのGPS受信機G01〜G04から入力された4つの測位データからそれぞれの捕捉衛星数を抽出する。その中から捕捉衛星数が最大のGPS受信機の測位データを最も信頼度が高いと判断し、測位位置表示部502に送信する。例えば、図3に示すようにGPS電波の飛来方向が前方である場合には、使用者の前面に装着されたGPS受信機G01が最も捕捉衛星数が多くなる。
【0029】
また、図4に示す例では、GPS受信機G01又はG04が捕捉衛星数が最も多くなり、図5に示す例では、GPS受信機G04が最も捕捉衛星数が多くなる。信頼性判断部501はこのようにして捕捉衛星数が最大のGPS受信機の測位データを最も信頼度が高いと判断する。捕捉衛星数が同数のGPS受信機が複数ある場合にはどのGPS受信機を選択しても良い。
【0030】
本実施形態では、色々な方向からのGPS電波を受信するため、複数のGPS受信機を使用者に装着する。例えば、4つのGPS受信機を使用者の左右の両肩、使用者のベルト等に前後に装着する。そのため、使用者の身体がGPS電波を遮る状況を軽減することが可能となり、前後左右4方向の4つのGPS受信機からGPS測位データが同時に得られる。
【0031】
また、各GPS受信機の測位データからGPS受信機が捕捉している衛星数が得られるため、捕捉衛星数が最も多いGPS受信機の測位データが最も信頼性が高いと判断してその測位データを採用することにより、従来に比べて精度の高い測位データを得ることが可能となる。更に、衛星の位置状況、使用者の進行方向、使用者の周辺状況(ビル、木立等のGPS電波を遮るものの状況)において信頼性の高いGPS受信機の測位データ(4つのうちの1つ)が得られ、指向性のあるアンテナを一番受信状態が良くなるように振ったと同様の効果が得られる。
【0032】
なお、本発明は、4つのGPS受信機を用いた例を示したが、本発明はこれに限ることなく、それ以上又はそれ以下であっても良い。また、各GPS受信機G01〜G04側で測位データを記録し、後処理として信頼性判断部501や測位位置表示部502と同様の処理をPC等で行っても構わない。その場合には、特殊な装置を使わずに4つのGPS受信機を用意するだけで高精度の測位が可能となるため、低コストで高精度の測位が実現可能となる。
【0033】
(第2の実施形態)
次に、本発明の第2の実施形態として各GPS受信機G01〜G04に周辺の光強度を検出する光センサを装着しても良い。具体的には、各GPS受信機からGPS測位データの他に光強度を入力として信頼性判断部501に送信し、信頼性判断部501ではそれぞれの測位データに対して以下の計算式で信頼度を計算し、一番信頼度が大きいと判断したGPS受信機の測位データを選択する。その場合の計算式には色々なものが考えられ、これは一例に過ぎない。
【0034】
信頼度=捕捉衛星数×光強度
このように各GPS受信機に光センサを装着して光の強度を計測することにより、GPS電波の飛来方向の見通しを推測することができる。即ち、光強度が大きいと飛来方向の見通しが良く、信頼度が高いと判断できる。また、光強度に時間的なゆらぎがある場合には、木漏れ陽の下と判断して信頼度を下げる判断をする。捕捉衛星数は多いが光強度が小さい場合には、マルチパスの影響があると判断する等、捕捉衛星数だけに頼るよりも精度の高い判断が可能となる。
【0035】
(第3の実施形態)
次に、本発明の第3の実施形態として各GPS受信機に周辺との距離(GPS受信機の周辺に存在する物体等)を計測する超音波距離計等を装着しても良い。即ち、測位データの他に周辺との距離情報を入力として信頼性判断部501に送信し、信頼性判断部501ではそれぞれの測位データに対して以下の式で信頼度を計算し、一番信頼度が大きいと判断したGPS受信機の測位データを選択する。この場合も計算式には色々なものが考えられ、これは一例にすぎない。計測不能の場合には距離を無限大として(1/距離)をゼロと計算する。
【0036】
信頼度=捕捉衛星数×(1−1/距離)
このように超音波距離計を各GPS受信機に装着してGPS受信機とその周辺との距離を計測し、計測不能(距離が無限大)なら見通しが良いと判断する。また、距離を計測できた場合には、距離が短い方がマルチパスの確率が高いと判断することにより捕捉衛星数だけに頼るよりも精度の高い判断が可能となる。
【0037】
なお、以上の実施形態のGPS測位システムは、ハードウェアによっても実現できるが、コンピュータをその情報処理システムとして機能させるためのプログラムをコンピュータがコンピュータ読み取り可能な記録媒体から読み込んで実行することによっても実現できる。また、以上の実施形態のGPS測位方法は、ハードウェアによっても実現できるが、コンピュータにその方法を実行させるためのプログラムをコンピュータがコンピュータ読み取り可能な記録媒体から読み込んで実行することによっても実現できる。
【0038】
また、上記実施形態の一部又は全部は、以下の付記のようにも記載されうるが、以下には限らない。
【0039】
(付記1)複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データのうち最も信頼度の高い測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【0040】
(付記2)複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データからGPS衛星の捕捉数を計測し、前記複数のGPS受信機のうち前記GPS衛星の捕捉数が最も多いGPS受信機の測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【0041】
(付記3)複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測手段と、
前記複数のGPS受信機にそれぞれ装着され、各GPS受信機の周辺の光強度を検出する光センサと、
前記衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と前記各GPS受信機に装着された光センサの光強度に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算手段と、
前記計算された複数のGPS受信機のうち最も信頼度の高いGPS受信機の測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【0042】
(付記4)前記信頼度計算手段は、信頼度=GPS受信機の衛星捕捉数×光センサの光強度によってGPS受信機の測位データの信頼度を計算することを特徴とする付記3に記載のGPS測位システム。
【0043】
(付記5)複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測手段と、
前記複数のGPS受信機にそれぞれ装着され、各GPS受信機と周辺との距離を計測する距離計測手段と、
前記衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と前記各GPS受信機に装着された距離計測手段の距離情報に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算手段と、
前記計算された各GPS受信機の信頼度のうち最も信頼度の高いGPS受信機の測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【0044】
(付記6)前記信頼度計算手段は、GPS受信機の衛星捕捉数×(1−1/距離計測手段の距離情報)によってGPS受信機の測位データの信頼度を計算することを特徴とする付記5に記載のGPS測位システム。
【0045】
(付記7)前記選択手段によって選択されたGPS受信機の測位データを採用して測位位置を表示する表示手段を有することを特徴とする付記1ないし6の何れか1項に記載のGPS測位システム。
【0046】
(付記8)複数のGPS受信機によりGPS衛星からの測位データを受信する工程と、
選択手段により前記複数のGPS受信機のそれぞれの測位データのうち最も信頼度の高い測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【0047】
(付記9)複数のGPS受信機よりGPS衛星からの測位データを受信する工程と、
選択手段により前記複数のGPS受信機のそれぞれの測位データからGPS衛星の捕捉数を計測し、前記複数のGPS受信機のうち前記GPS衛星の捕捉数が最も多いGPS受信機の測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【0048】
(付記10)複数のGPS受信機によりGPS衛星からの測位データを受信する工程と、
衛星捕捉数計測手段により前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測工程と、
前記複数のGPS受信機にそれぞれ装着された光センサにより各GPS受信機の周辺の光強度を検出する検出工程と、
信頼度計算手段により前記衛星捕捉数計測工程で計測された各GPS受信機の捕捉衛星数と前記検出工程で検出された各GPS受信機の周辺の光強度に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算工程と、
選択手段により前記信頼度計算工程で計算された各GPS受信機の信頼度のうち最も信頼度の高いGPS受信機の測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【0049】
(付記11)
前記信頼度計算工程において、信頼度=GPS受信機の衛星捕捉数×光センサの光強度によってGPS受信機の測位データの信頼度を計算することを特徴とする付記10に記載のGPS測位方法。
【0050】
(付記12)複数のGPS受信機によりGPS衛星からの測位データを受信する工程と、
衛星捕捉数計測手段により前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測工程と、
前記複数のGPS受信機にそれぞれ装着された距離計測手段により各GPS受信機と周辺との距離を計測する距離計測工程と、
信頼度計算手段により前記衛星捕捉数計測工程で計測された各GPS受信機の衛星捕捉数と前記距離計測工程で計測された距離情報に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算工程と、
選択手段より前記信頼度計算工程で計算された各GPS受信機のうち最も信頼度の高いGPS受信機の測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【0051】
(付記13)前記信頼度計算工程において、GPS受信機の衛星捕捉数×(1−1/距離計測手段の距離情報)によってGPS受信機の測位データの信頼度を計算することを特徴とする付記12に記載のGPS測位方法。
【0052】
(付記14)前記選択工程によって選択されたGPS受信機の測位データを採用して測位位置を表示する表示工程を含むことを特徴とする付記8ないし13の何れか1項に記載のGPS測位方法。
【0053】
(付記15)複数のGPS受信機を有し、前記複数のGPS受信機により受信した測位データの中から信頼度の最も高い測位データを採用するGPS測位システムのプログラムであって、
前記GPS測位システムを、
前記複数のGPS受信機のそれぞれの測位データのうち最も信頼度の高い測位データを選択する選択手段と、
して機能させるためのプログラム。
【0054】
(付記16)複数のGPS受信機を有し、前記複数のGPS受信機により受信した測位データの中から信頼度の最も高い測位データを採用するGPS測位システムのプログラムであって、
前記GPS測位システムを、
前記複数のGPS受信機のそれぞれの測位データからGPS衛星の捕捉数を計測し、前記複数のGPS受信機のうち前記GPS衛星の捕捉数が最も多いGPS受信機の測位データを選択する選択手段と、
して機能させるためのプログラム。
【0055】
(付記17)複数のGPS受信機を有し、前記複数のGPS受信機により受信した測位データの中から信頼度の最も高い測位データを採用するGPS測位システムのプログラムであって、
前記GPS測位システムを、
前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測手段と、
前記衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と各GPS受信機に装着された光センサの光強度に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算手段と、
前記計算された複数のGPS受信機のうち最も信頼度の高いGPS受信機の測位データを選択する選択手段と、
して機能させるためのプログラム。
【0056】
(付記18)前記信頼度計算手段は、信頼度=GPS受信機の衛星捕捉数×光センサの光強度によってGPS受信機の測位データの信頼度を計算することを特徴とする付記17に記載のプログラム。
【0057】
(付記19)複数のGPS受信機を有し、前記複数のGPS受信機により受信した測位データの中から信頼度の最も高い測位データを採用するGPS測位システムのプログラムであって、
前記GPS測位システムを、
前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測手段と、
前記衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と各GPS受信機に装着された距離計測手段の距離情報に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算手段と、
前記計算された各GPS受信機の信頼度のうち最も信頼度の高いGPS受信機の測位データを選択する選択手段と、
して機能させるためのプログラム。
【0058】
(付記20)前記信頼度計算手段は、GPS受信機の衛星捕捉数×(1−1/距離計測手段の距離情報)によってGPS受信機の測位データの信頼度を計算することを特徴とする付記19に記載のプログラム。
【0059】
(付記21)前記選択手段によって選択されたGPS受信機の測位データを採用して測位位置を表示させる表示手段として機能させることを特徴とする付記15ないし20の何れか1項に記載のプログラム。
【産業上の利用可能性】
【0060】
本発明は、使用者の位置情報を高精度化できるので、初めての土地での道案内システム等に好適に使用できる。また、クレーン車等自分自身のクレーンでGPS電波を遮る可能性のある移動体に対して歩行者と同様に複数のGPS受信機を搭載することにより測位精度を高精度化できる。
【符号の説明】
【0061】
501 信頼性判断部
502 測位位置表示部
G01〜G04 GPS受信機
【特許請求の範囲】
【請求項1】
複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データのうち最も信頼度の高い測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【請求項2】
複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データからGPS衛星の捕捉数を計測し、前記複数のGPS受信機のうち前記GPS衛星の捕捉数が最も多いGPS受信機の測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【請求項3】
複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測手段と、
前記複数のGPS受信機にそれぞれ装着され、各GPS受信機の周辺の光強度を検出する光センサと、
前記衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と前記各GPS受信機に装着された光センサの光強度に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算手段と、
前記計算された複数のGPS受信機のうち最も信頼度の高いGPS受信機の測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【請求項4】
複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測手段と、
前記複数のGPS受信機にそれぞれ装着され、各GPS受信機と周辺との距離を計測する距離計測手段と、
前記衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と前記各GPS受信機に装着された距離計測手段の距離情報に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算手段と、
前記計算された各GPS受信機の信頼度のうち最も信頼度の高いGPS受信機の測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【請求項5】
前記選択手段によって選択されたGPS受信機の測位データを採用して測位位置を表示する表示手段を有することを特徴とする請求項1ないし4の何れか1項に記載のGPS測位システム。
【請求項6】
複数のGPS受信機によりGPS衛星からの測位データを受信する工程と、
選択手段により前記複数のGPS受信機のそれぞれの測位データのうち最も信頼度の高い測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【請求項7】
複数のGPS受信機よりGPS衛星からの測位データを受信する工程と、
選択手段により前記複数のGPS受信機のそれぞれの測位データからGPS衛星の捕捉数を計測し、前記複数のGPS受信機のうち前記GPS衛星の捕捉数が最も多いGPS受信機の測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【請求項8】
複数のGPS受信機によりGPS衛星からの測位データを受信する工程と、
衛星捕捉数計測手段により前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測工程と、
前記複数のGPS受信機にそれぞれ装着された光センサにより各GPS受信機の周辺の光強度を検出する検出工程と、
信頼度計算手段により前記衛星捕捉数計測工程で計測された各GPS受信機の捕捉衛星数と前記検出工程で検出された各GPS受信機の周辺の光強度に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算工程と、
選択手段により前記信頼度計算工程で計算された各GPS受信機の信頼度のうち最も信頼度の高いGPS受信機の測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【請求項9】
複数のGPS受信機によりGPS衛星からの測位データを受信する工程と、
衛星捕捉数計測手段により前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測工程と、
前記複数のGPS受信機にそれぞれ装着された距離計測手段により各GPS受信機と周辺との距離を計測する距離計測工程と、
信頼度計算手段により前記衛星捕捉数計測工程で計測された各GPS受信機の衛星捕捉数と前記距離計測工程で計測された距離情報に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算工程と、
選択手段より前記信頼度計算工程で計算された各GPS受信機のうち最も信頼度の高いGPS受信機の測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【請求項10】
前記選択工程によって選択されたGPS受信機の測位データを採用して測位位置を表示する表示工程を含むことを特徴とする請求項6ないし9の何れか1項に記載のGPS測位方法。
【請求項1】
複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データのうち最も信頼度の高い測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【請求項2】
複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データからGPS衛星の捕捉数を計測し、前記複数のGPS受信機のうち前記GPS衛星の捕捉数が最も多いGPS受信機の測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【請求項3】
複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測手段と、
前記複数のGPS受信機にそれぞれ装着され、各GPS受信機の周辺の光強度を検出する光センサと、
前記衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と前記各GPS受信機に装着された光センサの光強度に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算手段と、
前記計算された複数のGPS受信機のうち最も信頼度の高いGPS受信機の測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【請求項4】
複数のGPS受信機と、
前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測手段と、
前記複数のGPS受信機にそれぞれ装着され、各GPS受信機と周辺との距離を計測する距離計測手段と、
前記衛星捕捉数計測手段で計測された各GPS受信機の捕捉衛星数と前記各GPS受信機に装着された距離計測手段の距離情報に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算手段と、
前記計算された各GPS受信機の信頼度のうち最も信頼度の高いGPS受信機の測位データを選択する選択手段と、
を備えたことを特徴とするGPS測位システム。
【請求項5】
前記選択手段によって選択されたGPS受信機の測位データを採用して測位位置を表示する表示手段を有することを特徴とする請求項1ないし4の何れか1項に記載のGPS測位システム。
【請求項6】
複数のGPS受信機によりGPS衛星からの測位データを受信する工程と、
選択手段により前記複数のGPS受信機のそれぞれの測位データのうち最も信頼度の高い測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【請求項7】
複数のGPS受信機よりGPS衛星からの測位データを受信する工程と、
選択手段により前記複数のGPS受信機のそれぞれの測位データからGPS衛星の捕捉数を計測し、前記複数のGPS受信機のうち前記GPS衛星の捕捉数が最も多いGPS受信機の測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【請求項8】
複数のGPS受信機によりGPS衛星からの測位データを受信する工程と、
衛星捕捉数計測手段により前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測工程と、
前記複数のGPS受信機にそれぞれ装着された光センサにより各GPS受信機の周辺の光強度を検出する検出工程と、
信頼度計算手段により前記衛星捕捉数計測工程で計測された各GPS受信機の捕捉衛星数と前記検出工程で検出された各GPS受信機の周辺の光強度に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算工程と、
選択手段により前記信頼度計算工程で計算された各GPS受信機の信頼度のうち最も信頼度の高いGPS受信機の測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【請求項9】
複数のGPS受信機によりGPS衛星からの測位データを受信する工程と、
衛星捕捉数計測手段により前記複数のGPS受信機のそれぞれの測位データから各GPS受信機の衛星捕捉数を計測する衛星捕捉数計測工程と、
前記複数のGPS受信機にそれぞれ装着された距離計測手段により各GPS受信機と周辺との距離を計測する距離計測工程と、
信頼度計算手段により前記衛星捕捉数計測工程で計測された各GPS受信機の衛星捕捉数と前記距離計測工程で計測された距離情報に基づいて各GPS受信機の測位データの信頼度を計算する信頼度計算工程と、
選択手段より前記信頼度計算工程で計算された各GPS受信機のうち最も信頼度の高いGPS受信機の測位データを選択する選択工程と、
を含むことを特徴とするGPS測位方法。
【請求項10】
前記選択工程によって選択されたGPS受信機の測位データを採用して測位位置を表示する表示工程を含むことを特徴とする請求項6ないし9の何れか1項に記載のGPS測位方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−237250(P2011−237250A)
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願番号】特願2010−108230(P2010−108230)
【出願日】平成22年5月10日(2010.5.10)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願日】平成22年5月10日(2010.5.10)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]