
GPS測位精度早期安定化方法
【課題】橋梁や歩道橋などの物体が存在する道路においても常に高精度の現在位置表示が得られようにしたGPS測位精度早期安定化方法を提供すること。
【解決手段】道路にある歩道橋やトンネルなどの構造物100の出口105の近傍に、GPSアンテナ102とリピータアンテナ103を備えたリピータ101を設け、構造物100の下の道路を走行している自動車などの移動体200が出口105の近傍にきたとき、GPS衛星からGPSアンテナ102で受信した電波を、リピータアンテナ103を介して当該移動体200に中継し、移動体200に搭載したGPS受信機210による位置算出処理が、移動体200が構造物100を通過する際、その手前から開始されるようにし、GPS衛星からの電波を直接受信できる場所に移動体100が移動した際、GPS受信機が算出する位置の精度が早く復帰されるようにした。
【解決手段】道路にある歩道橋やトンネルなどの構造物100の出口105の近傍に、GPSアンテナ102とリピータアンテナ103を備えたリピータ101を設け、構造物100の下の道路を走行している自動車などの移動体200が出口105の近傍にきたとき、GPS衛星からGPSアンテナ102で受信した電波を、リピータアンテナ103を介して当該移動体200に中継し、移動体200に搭載したGPS受信機210による位置算出処理が、移動体200が構造物100を通過する際、その手前から開始されるようにし、GPS衛星からの電波を直接受信できる場所に移動体100が移動した際、GPS受信機が算出する位置の精度が早く復帰されるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GPS測位システムの測位精度を早期に安定化する方法に係り、特に自動車の位置測定に適用されるGPS測位システムの測位精度早期安定化方法に関する。
【背景技術】
【0002】
人工衛星の電波を利用したGPS測位システムは、いわゆるカーナビシステムとして、特に自動車には極めて有用な装備品として近年広く認識されるようになっているが、この場合、走行中も常に精度よく安定して車両位置の表示が与えられるのが望ましい。
【0003】
そこで、特定の場所で外部から与えられる情報に依存し、その都度、現在の正確な車両位置を取込み、GPS測位システムにより与えられる位置を補正することにより、高精度の車両位置が表示できるようにした現在位置算出装置が従来技術として提案されている(例えば、特許文献1参照。)。
【0004】
そして、この従来技術では、車両の現在位置情報を外部から受信する手段として、有料道路のETC料金収受システムに用いられている通信手段を利用している。
【特許文献1】特開2001−289653号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記従来技術は、道路に存在する橋梁や歩道橋など各種物体に配慮がされておらず、このため、以下に説明するように、車両位置精度の維持に問題があった。
【0006】
自動車の走行は、当然のことではあるが道路上に限られるのが通例であり、この場合、走行路には橋梁や歩道橋など各種の物体が存在することになる。そこで、この場合は、GPS測位システムを搭載した車両が走行移動し、橋梁や歩道橋などの物体の下に入ったとすると、当該物体により電波が遮蔽され、GPS衛星からの電波の捕捉が途切れてしまう。
【0007】
そして、車両が橋梁や歩道橋などの下を通過した時点で衛星からの電波がGPS受信機に再び捕捉されることになるが、このとき、電波を再捕捉してから安定した位置が検出できるまでにはかなりの時間を要し、その間、正しい位置から数百メートルもずれた位置を算出してしまう虞がある。
【0008】
しかるに上記従来技術では、有料道路のETC料金収受システムなどが置かれている特定の位置でしか現在位置の補正ができないので、上記した電波の再捕捉時での位置ずれに対応できず、従って車両位置精度の維持に問題が生じてしまうのである。
【0009】
本発明の目的は、橋梁や歩道橋などの物体が存在する道路においても常に高精度の現在位置表示が得られようにしたGPS測位精度早期安定化方法を提供することにある。
【課題を解決するための手段】
【0010】
上記目的は、移動体に装備したGPS測位システムのGPS測位精度早期安定化方法であって、前記移動体が走行する道路上にある構造物の出口の近傍にGPS電波中継用の手段を設け、前記移動体が前記構造物の出口の近傍にさしかかった際、前記移動体に装備したGPS測位システムによる測位処理が予め開始させられているようにして達成される。
【0011】
このとき、GPS電波中継用の手段とは、例えばGPSアンテナとリピータアンテナを備えたリピータのことであり、ここでリピータとは中継装置のことで、これを橋下・歩道橋・架下等の出入り口付近に設置することにより、橋下・歩道橋・架下等を出る前から、衛星を捕捉可能な状態にすることができ、これにより、移動体のGPS受信機は、衛星捕捉処理を橋下・歩道橋・架下等を出る前から行うことができるようになる。
【0012】
これにより、橋下・歩道橋・架下等を通過後、GPS受信機が衛星を再捕捉するまでに要する時間を短くし、橋下・歩道橋・架下等を通過直後に正しい位置から数百メートル離れた位置を算出してしまうという事象の発生頻度を下げることができる。
【発明の効果】
【0013】
本発明によれば、GPS受信機を搭載した移動体が橋などの構造物の下でGPS衛星からの電波を直接受信できない場所を通過してから、再びGPS衛星からの電波を直接受信できる場所へ移動した際、GPS受信機が算出する位置の精度が早く復帰するので、復帰直後に位置が誤って算出される虞がなく、従って、正しい位置から数百メートル離れた位置を算出してしまうという事象の発生頻度を下げる効果がある。
【0014】
また、本発明によれば、GPS受信機に特別な信号受信手段を設ける必要がないので、車両側の装置にコストの上昇を伴う虞がない。
【発明を実施するための最良の形態】
【0015】
以下、本発明によるGPS測位精度早期安定化方法について、図示の実施の形態により詳細に説明する。
【0016】
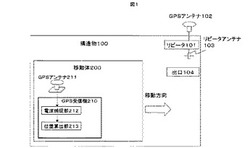
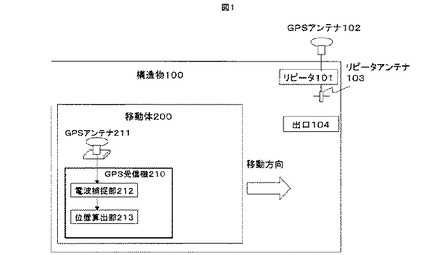
ここで、図1は本発明によるGPS測位精度早期安定化方法の一実施形態が適用されたGPS測位システムの一例で、この場合、システムは、大きく分けて構造物100と移動体200で構成され、ここで、構造物100とは、橋梁や歩道橋など道路に存在する各種の物体のことで、移動体200は、この道路を走行している自動車などの車両のことであり、このとき矢印は、図示のように、車両の移動方向を表わしている。
【0017】
そして、まず、構造物100には、リピータ101とGPSアンテナ102、それにリピータアンテナ103が備えられている。このときリピータ101の設置箇所は構造物100の中など何処でもよいが、GPSアンテナ102は、天空が開けていて、少なくとも3基のGPS衛星によるGPS電波が同時に受信できる位置に設置され、他方、リピータアンテナ103は、構造物100の出口104の近傍において道路に向けて設置される。
【0018】
次に、移動体200にはカーナビシステムを構成しているGPS受信機210とGPSアンテナ211が装備してあり、このときGPS受信機210は、一般的なGPS受信機に必要な構成として電波捕捉部212と位置算出部213が備えられている。
【0019】
次に、各部分の構成について詳細に説明する。このとき移動体200は、構造物100の中、つまり橋の下や建物の中など、GPS衛星からの直接波を受信できない場所から矢印方向に移動を開始し、出口104からGPS衛星によるGPS電波が直接受信できる場所(天空の開けている屋外等を想定)に抜けて移動するものとする。
【0020】
まず、リピータ101は、GPSアンテナ102によりGPS衛星から受信したGPS電波による信号を増幅し、リピータアンテナ103から電波として再び送信する中継装置としての働きをする。このとき、少なくとも3基のGPS衛星による信号を中継する必要があり、このため、上記したように、天空が開けている場所にGPSアンテナ102を設置し、複数のGPS衛星によるGPS電波が同時に受信できるようにしてある。
【0021】
次に、リピータアンテナ103は、中継すべきGPS衛星による信号を電波に乗せて送信する働きをする。そして、これにより構造物100の中を走行している移動体200が出口104の近傍にさしかかったとき、このリピータアンテナ103から送信されている電波が当該移動体200により受信できるようにしている。
【0022】
このとき、移動体200に搭載されているGPS受信機210とGPSアンテナ211は、図示してないGPS衛星からの電波を受信する働きをし、電波捕捉部212と位置算出部213は、移動体100の位置を検出し、位置情報を算出する働きをする。
【0023】
ここで、算出された位置情報は図示してないモニタ装置に供給される。そして、その表示面に映出させた地図上にマークとして表示され、これによりカーナビシステムとしての働きが得られることになる。このとき、モニタ装置の設置位置は、移動体200の外であっても良い。
【0024】
次に、この実施形態の動作について説明すると、ここで、まず、移動体200は、構造物100の下又は中にあったとき、GPS衛星からの直接波は受信できず、また、出口104付近からも離れているので、リピータアンテナ101からの電波も受信できない状態にある。従って、この状態では、GPS受信機210にはGPS衛星からの電波が全く届かないため、GPS受信機210の電波捕捉部212と位置算出部213は、自車の位置を算出する処理はできない。
【0025】
次に、移動体200が移動し、出口104に近づいたとすると、リピータ101のリピータアンテナ103から出口104付近に向けて送信されている電波が移動体200のGPSアンテナ211により受信されるようになり、これから信号がGPS受信機210内の電波捕捉部212に出力される。
【0026】
そこで、電波捕捉部212は、当該信号をデータ化し、GPS衛星からリピータ101のGPSアンテナ102までの擬似距離や搬送波位相値などの位置算出に必要な諸物理量を算出し、位置算出部213は、電波捕捉部212から入力された擬似距離や搬送波位相値などの位置算出に必要な諸物理量に基づいてGPSアンテナ102の位置を算出する。
【0027】
このとき、電波捕捉部212は、前述のとおり、GPS電波の捕捉を開始した後、しばらくは安定した位置の算出ができず、データが安定するまでにはある程度の時間を要する。そこで、この電波が捕捉された直後のときは、電波捕捉部212から供給された擬似距離や搬送波位相値などの位置算出に必要な諸物理量については、また精度が低く、データのばらつきなども大きくなっている。
【0028】
従って、このときは、当初は位置算出部213での位置の算出が不可能であったり、上記したように、正しい位置から数百メートル離れた位置を算出してまう可能性があるが、とにかく電波捕捉部212と位置算出部213による位置算出のための処理は、リピータ101の電波により開始されている。そして、或る程度の時間経過後は安定してGPSアンテナ102の位置が算出されていることになる。
【0029】
次に、移動体200が更に移動して構造物100の外に出たとする。そうすると、ここで移動体200のGPSアンテナ211は、リピータアンテナ103からの電波は受信できなくなるが、その代りに今度はGPS衛星から直接波が受信されるようになり、この時点からGPS受信機211の電波捕捉部212による処理は、GPS衛星から受信した信号に基づくものとなる。
【0030】
ここで、いま、従来技術のように、リピータ101が無かったとすると、この場合、電波捕捉部212は、前述のとおり、GPS電波の捕捉を開始した後しばらくは安定した位置の算出ができず、データが安定するまでにはある程度の時間を要するので、上記したように、安定した位置の算出ができない。
【0031】
しかし、この実施形態の場合は、電波捕捉部212と位置算出部213による位置算出のための処理が、既にリピータ101の電波により開始されているので、正しい位置を算出するまでに要する時間が短縮されており、従って、位置算出部213は、移動体200が構造物100から外に出たあと、直ちに安定して正しい位置を算出することができる。
【0032】
つまり、この実施形態によれば、GPS受信機210内の電波捕捉部212は、GPS衛星からの電波捕捉開始直後の精度が低く、データのばらつきなども大きくなってしまう処理については、移動体200が構造物100の外に出る前、既に実行し終えておくことができ、従って、移動体200が構造物100の外に出た直後から、安定した位置精度が確保できるのである。
【0033】
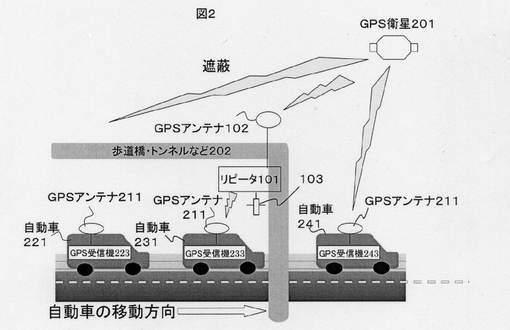
次に、この実施形態の動作について、図2により更に具体的に説明すると、ここで、まず、この図2にはGPS衛星201が示してある。次に、この図2では、図1の構造体100については歩道橋・トンネル202として示してあり、この下に道路Lが通っているものとする。そして、同じく図1の移動体200については、それぞれ自動車221、231、241として示してあり、これらは、道路L上を走行しているものとする。つまり、自動車221から自動車231、自動車241へと移動するものとする。
【0034】
そうすると、まず、自動車221の場合は、歩道橋・トンネル202の下又は中を走行していて、GPS衛星からの直接波は受信できず、また、出口104付近からも離れているので、リピータアンテナ101からの電波も受信できない状態にある。
【0035】
従って、この状態では、GPS受信機210にはGPS衛星からの電波が全く届かないため、GPS受信機210の電波捕捉部212と位置算出部213は、自車の位置を算出するための処理はできない。そこで、自動車221が歩道橋・トンネル202の下又は中に至る前の位置情報が更新されずに表示されていることになる。
【0036】
次に、自動車221が走行し、出口104に近づいていって、自動車231の状態になると、リピータ101のリピータアンテナ103から歩道橋・トンネル202内の出口104付近に向けて送信されている電波が自動車231のGPSアンテナ211により受信されるようになる。
【0037】
そこで、リピータ101から電波を受信したGPSアンテナ211は、捕捉した信号をGPS受信機210内の電波捕捉部212に出力する。信号を受信した電波捕捉部212は、信号をデータ化し、GPS衛星102からリピータアンテナ103までの擬似距離や搬送波位相値などの位置算出に必要な諸物理量を算出し、その値を位置算出部213に出力する。
【0038】
これにより、位置算出部213は、電波捕捉部212から入力された擬似距離や搬送波位相値などの位置算出に必要な諸物理量に基づいてGPSアンテナ102の位置を算出するが、しかし、この状態では、まだ電波の捕捉を開始した直後であるため、電波捕捉部212から供給された擬似距離や搬送波位相値などの位置算出に必要な諸物理量については精度が低く、データのばらつきなども大きくなっている。
【0039】
従って、自動車231の場合、位置算出部213では、位置の算出が不可能であったり、上記したように、正しい位置から数百メートル離れた位置を算出してまうなどの好ましくない事態が発生してしまう虞があるが、このとき、リピータアンテナ103からの電波が受信されているため、GPS受信機210は、衛星捕捉に必要な処理をここで既に開始させておくことができる。
【0040】
そして、更に自動車231が走行を続け、歩道橋・トンネル202から抜けて自動車241の位置に到達したとする。そうすると、この自動車241のGPSアンテナ211は、ここでリピータ101から送信されている電波は、距離が長くなって届かなくなり、受信できなくなるが、その代わりに、歩道橋・トンネル202から外に出たことにより、今度はGPS衛星201からの直接波が受信できるようになる。
【0041】
このとき自動車241に搭載されているGPS受信機210は、本来であれば、自動車241の位置に到着してから衛星捕捉のための処理を開始するのであるが、この実施形態の場合、自動車241に搭載されているGPS受信機210は、自動車231の位置にいた段階で既に衛星捕捉処理を開始しているため、自動車241が歩道橋・トンネル202から抜け出た直後、速やかに安定した位置を算出できるようになる。
【0042】
従って、この実施形態によれば、自動車が歩道橋・トンネル202に入ったあと、それを抜け出たときでも直ちに安定した精度の位置に復帰するので、復帰直後の正しい位置から数百メートル離れた位置を算出してしまうなどの好ましくない事象が発生する頻度を下げることができる。
【0043】
また、この実施形態によれば、GPS受信機211に特別な信号受信手段を設ける必要がないので、自動車側の装置にコストの上昇を伴う虞がなく、優れた性能のカーナビシステムの提供に寄与することができる。
【図面の簡単な説明】
【0044】
【図1】本発明によるGPS測位精度早期安定化方法の一実施形態を示すシステム構成図である。
【図2】本発明によるGPS測位精度早期安定化方法の一実施形態による動作を説明するための模式図である。
【符号の説明】
【0045】
100:構造物
101:リピータ(中継装置)
102:GPSアンテナ
103:リピータアンテナ
104:出口(構造物の出口)
200:移動体
210:GPS受信機
211:GPSアンテナ
212:電波捕捉部
213:位置算出部
201:GPS衛星
202:歩道橋・トンネル
211:GPSアンテナ
221、231、241:自動車
L:道路
【技術分野】
【0001】
本発明は、GPS測位システムの測位精度を早期に安定化する方法に係り、特に自動車の位置測定に適用されるGPS測位システムの測位精度早期安定化方法に関する。
【背景技術】
【0002】
人工衛星の電波を利用したGPS測位システムは、いわゆるカーナビシステムとして、特に自動車には極めて有用な装備品として近年広く認識されるようになっているが、この場合、走行中も常に精度よく安定して車両位置の表示が与えられるのが望ましい。
【0003】
そこで、特定の場所で外部から与えられる情報に依存し、その都度、現在の正確な車両位置を取込み、GPS測位システムにより与えられる位置を補正することにより、高精度の車両位置が表示できるようにした現在位置算出装置が従来技術として提案されている(例えば、特許文献1参照。)。
【0004】
そして、この従来技術では、車両の現在位置情報を外部から受信する手段として、有料道路のETC料金収受システムに用いられている通信手段を利用している。
【特許文献1】特開2001−289653号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記従来技術は、道路に存在する橋梁や歩道橋など各種物体に配慮がされておらず、このため、以下に説明するように、車両位置精度の維持に問題があった。
【0006】
自動車の走行は、当然のことではあるが道路上に限られるのが通例であり、この場合、走行路には橋梁や歩道橋など各種の物体が存在することになる。そこで、この場合は、GPS測位システムを搭載した車両が走行移動し、橋梁や歩道橋などの物体の下に入ったとすると、当該物体により電波が遮蔽され、GPS衛星からの電波の捕捉が途切れてしまう。
【0007】
そして、車両が橋梁や歩道橋などの下を通過した時点で衛星からの電波がGPS受信機に再び捕捉されることになるが、このとき、電波を再捕捉してから安定した位置が検出できるまでにはかなりの時間を要し、その間、正しい位置から数百メートルもずれた位置を算出してしまう虞がある。
【0008】
しかるに上記従来技術では、有料道路のETC料金収受システムなどが置かれている特定の位置でしか現在位置の補正ができないので、上記した電波の再捕捉時での位置ずれに対応できず、従って車両位置精度の維持に問題が生じてしまうのである。
【0009】
本発明の目的は、橋梁や歩道橋などの物体が存在する道路においても常に高精度の現在位置表示が得られようにしたGPS測位精度早期安定化方法を提供することにある。
【課題を解決するための手段】
【0010】
上記目的は、移動体に装備したGPS測位システムのGPS測位精度早期安定化方法であって、前記移動体が走行する道路上にある構造物の出口の近傍にGPS電波中継用の手段を設け、前記移動体が前記構造物の出口の近傍にさしかかった際、前記移動体に装備したGPS測位システムによる測位処理が予め開始させられているようにして達成される。
【0011】
このとき、GPS電波中継用の手段とは、例えばGPSアンテナとリピータアンテナを備えたリピータのことであり、ここでリピータとは中継装置のことで、これを橋下・歩道橋・架下等の出入り口付近に設置することにより、橋下・歩道橋・架下等を出る前から、衛星を捕捉可能な状態にすることができ、これにより、移動体のGPS受信機は、衛星捕捉処理を橋下・歩道橋・架下等を出る前から行うことができるようになる。
【0012】
これにより、橋下・歩道橋・架下等を通過後、GPS受信機が衛星を再捕捉するまでに要する時間を短くし、橋下・歩道橋・架下等を通過直後に正しい位置から数百メートル離れた位置を算出してしまうという事象の発生頻度を下げることができる。
【発明の効果】
【0013】
本発明によれば、GPS受信機を搭載した移動体が橋などの構造物の下でGPS衛星からの電波を直接受信できない場所を通過してから、再びGPS衛星からの電波を直接受信できる場所へ移動した際、GPS受信機が算出する位置の精度が早く復帰するので、復帰直後に位置が誤って算出される虞がなく、従って、正しい位置から数百メートル離れた位置を算出してしまうという事象の発生頻度を下げる効果がある。
【0014】
また、本発明によれば、GPS受信機に特別な信号受信手段を設ける必要がないので、車両側の装置にコストの上昇を伴う虞がない。
【発明を実施するための最良の形態】
【0015】
以下、本発明によるGPS測位精度早期安定化方法について、図示の実施の形態により詳細に説明する。
【0016】
ここで、図1は本発明によるGPS測位精度早期安定化方法の一実施形態が適用されたGPS測位システムの一例で、この場合、システムは、大きく分けて構造物100と移動体200で構成され、ここで、構造物100とは、橋梁や歩道橋など道路に存在する各種の物体のことで、移動体200は、この道路を走行している自動車などの車両のことであり、このとき矢印は、図示のように、車両の移動方向を表わしている。
【0017】
そして、まず、構造物100には、リピータ101とGPSアンテナ102、それにリピータアンテナ103が備えられている。このときリピータ101の設置箇所は構造物100の中など何処でもよいが、GPSアンテナ102は、天空が開けていて、少なくとも3基のGPS衛星によるGPS電波が同時に受信できる位置に設置され、他方、リピータアンテナ103は、構造物100の出口104の近傍において道路に向けて設置される。
【0018】
次に、移動体200にはカーナビシステムを構成しているGPS受信機210とGPSアンテナ211が装備してあり、このときGPS受信機210は、一般的なGPS受信機に必要な構成として電波捕捉部212と位置算出部213が備えられている。
【0019】
次に、各部分の構成について詳細に説明する。このとき移動体200は、構造物100の中、つまり橋の下や建物の中など、GPS衛星からの直接波を受信できない場所から矢印方向に移動を開始し、出口104からGPS衛星によるGPS電波が直接受信できる場所(天空の開けている屋外等を想定)に抜けて移動するものとする。
【0020】
まず、リピータ101は、GPSアンテナ102によりGPS衛星から受信したGPS電波による信号を増幅し、リピータアンテナ103から電波として再び送信する中継装置としての働きをする。このとき、少なくとも3基のGPS衛星による信号を中継する必要があり、このため、上記したように、天空が開けている場所にGPSアンテナ102を設置し、複数のGPS衛星によるGPS電波が同時に受信できるようにしてある。
【0021】
次に、リピータアンテナ103は、中継すべきGPS衛星による信号を電波に乗せて送信する働きをする。そして、これにより構造物100の中を走行している移動体200が出口104の近傍にさしかかったとき、このリピータアンテナ103から送信されている電波が当該移動体200により受信できるようにしている。
【0022】
このとき、移動体200に搭載されているGPS受信機210とGPSアンテナ211は、図示してないGPS衛星からの電波を受信する働きをし、電波捕捉部212と位置算出部213は、移動体100の位置を検出し、位置情報を算出する働きをする。
【0023】
ここで、算出された位置情報は図示してないモニタ装置に供給される。そして、その表示面に映出させた地図上にマークとして表示され、これによりカーナビシステムとしての働きが得られることになる。このとき、モニタ装置の設置位置は、移動体200の外であっても良い。
【0024】
次に、この実施形態の動作について説明すると、ここで、まず、移動体200は、構造物100の下又は中にあったとき、GPS衛星からの直接波は受信できず、また、出口104付近からも離れているので、リピータアンテナ101からの電波も受信できない状態にある。従って、この状態では、GPS受信機210にはGPS衛星からの電波が全く届かないため、GPS受信機210の電波捕捉部212と位置算出部213は、自車の位置を算出する処理はできない。
【0025】
次に、移動体200が移動し、出口104に近づいたとすると、リピータ101のリピータアンテナ103から出口104付近に向けて送信されている電波が移動体200のGPSアンテナ211により受信されるようになり、これから信号がGPS受信機210内の電波捕捉部212に出力される。
【0026】
そこで、電波捕捉部212は、当該信号をデータ化し、GPS衛星からリピータ101のGPSアンテナ102までの擬似距離や搬送波位相値などの位置算出に必要な諸物理量を算出し、位置算出部213は、電波捕捉部212から入力された擬似距離や搬送波位相値などの位置算出に必要な諸物理量に基づいてGPSアンテナ102の位置を算出する。
【0027】
このとき、電波捕捉部212は、前述のとおり、GPS電波の捕捉を開始した後、しばらくは安定した位置の算出ができず、データが安定するまでにはある程度の時間を要する。そこで、この電波が捕捉された直後のときは、電波捕捉部212から供給された擬似距離や搬送波位相値などの位置算出に必要な諸物理量については、また精度が低く、データのばらつきなども大きくなっている。
【0028】
従って、このときは、当初は位置算出部213での位置の算出が不可能であったり、上記したように、正しい位置から数百メートル離れた位置を算出してまう可能性があるが、とにかく電波捕捉部212と位置算出部213による位置算出のための処理は、リピータ101の電波により開始されている。そして、或る程度の時間経過後は安定してGPSアンテナ102の位置が算出されていることになる。
【0029】
次に、移動体200が更に移動して構造物100の外に出たとする。そうすると、ここで移動体200のGPSアンテナ211は、リピータアンテナ103からの電波は受信できなくなるが、その代りに今度はGPS衛星から直接波が受信されるようになり、この時点からGPS受信機211の電波捕捉部212による処理は、GPS衛星から受信した信号に基づくものとなる。
【0030】
ここで、いま、従来技術のように、リピータ101が無かったとすると、この場合、電波捕捉部212は、前述のとおり、GPS電波の捕捉を開始した後しばらくは安定した位置の算出ができず、データが安定するまでにはある程度の時間を要するので、上記したように、安定した位置の算出ができない。
【0031】
しかし、この実施形態の場合は、電波捕捉部212と位置算出部213による位置算出のための処理が、既にリピータ101の電波により開始されているので、正しい位置を算出するまでに要する時間が短縮されており、従って、位置算出部213は、移動体200が構造物100から外に出たあと、直ちに安定して正しい位置を算出することができる。
【0032】
つまり、この実施形態によれば、GPS受信機210内の電波捕捉部212は、GPS衛星からの電波捕捉開始直後の精度が低く、データのばらつきなども大きくなってしまう処理については、移動体200が構造物100の外に出る前、既に実行し終えておくことができ、従って、移動体200が構造物100の外に出た直後から、安定した位置精度が確保できるのである。
【0033】
次に、この実施形態の動作について、図2により更に具体的に説明すると、ここで、まず、この図2にはGPS衛星201が示してある。次に、この図2では、図1の構造体100については歩道橋・トンネル202として示してあり、この下に道路Lが通っているものとする。そして、同じく図1の移動体200については、それぞれ自動車221、231、241として示してあり、これらは、道路L上を走行しているものとする。つまり、自動車221から自動車231、自動車241へと移動するものとする。
【0034】
そうすると、まず、自動車221の場合は、歩道橋・トンネル202の下又は中を走行していて、GPS衛星からの直接波は受信できず、また、出口104付近からも離れているので、リピータアンテナ101からの電波も受信できない状態にある。
【0035】
従って、この状態では、GPS受信機210にはGPS衛星からの電波が全く届かないため、GPS受信機210の電波捕捉部212と位置算出部213は、自車の位置を算出するための処理はできない。そこで、自動車221が歩道橋・トンネル202の下又は中に至る前の位置情報が更新されずに表示されていることになる。
【0036】
次に、自動車221が走行し、出口104に近づいていって、自動車231の状態になると、リピータ101のリピータアンテナ103から歩道橋・トンネル202内の出口104付近に向けて送信されている電波が自動車231のGPSアンテナ211により受信されるようになる。
【0037】
そこで、リピータ101から電波を受信したGPSアンテナ211は、捕捉した信号をGPS受信機210内の電波捕捉部212に出力する。信号を受信した電波捕捉部212は、信号をデータ化し、GPS衛星102からリピータアンテナ103までの擬似距離や搬送波位相値などの位置算出に必要な諸物理量を算出し、その値を位置算出部213に出力する。
【0038】
これにより、位置算出部213は、電波捕捉部212から入力された擬似距離や搬送波位相値などの位置算出に必要な諸物理量に基づいてGPSアンテナ102の位置を算出するが、しかし、この状態では、まだ電波の捕捉を開始した直後であるため、電波捕捉部212から供給された擬似距離や搬送波位相値などの位置算出に必要な諸物理量については精度が低く、データのばらつきなども大きくなっている。
【0039】
従って、自動車231の場合、位置算出部213では、位置の算出が不可能であったり、上記したように、正しい位置から数百メートル離れた位置を算出してまうなどの好ましくない事態が発生してしまう虞があるが、このとき、リピータアンテナ103からの電波が受信されているため、GPS受信機210は、衛星捕捉に必要な処理をここで既に開始させておくことができる。
【0040】
そして、更に自動車231が走行を続け、歩道橋・トンネル202から抜けて自動車241の位置に到達したとする。そうすると、この自動車241のGPSアンテナ211は、ここでリピータ101から送信されている電波は、距離が長くなって届かなくなり、受信できなくなるが、その代わりに、歩道橋・トンネル202から外に出たことにより、今度はGPS衛星201からの直接波が受信できるようになる。
【0041】
このとき自動車241に搭載されているGPS受信機210は、本来であれば、自動車241の位置に到着してから衛星捕捉のための処理を開始するのであるが、この実施形態の場合、自動車241に搭載されているGPS受信機210は、自動車231の位置にいた段階で既に衛星捕捉処理を開始しているため、自動車241が歩道橋・トンネル202から抜け出た直後、速やかに安定した位置を算出できるようになる。
【0042】
従って、この実施形態によれば、自動車が歩道橋・トンネル202に入ったあと、それを抜け出たときでも直ちに安定した精度の位置に復帰するので、復帰直後の正しい位置から数百メートル離れた位置を算出してしまうなどの好ましくない事象が発生する頻度を下げることができる。
【0043】
また、この実施形態によれば、GPS受信機211に特別な信号受信手段を設ける必要がないので、自動車側の装置にコストの上昇を伴う虞がなく、優れた性能のカーナビシステムの提供に寄与することができる。
【図面の簡単な説明】
【0044】
【図1】本発明によるGPS測位精度早期安定化方法の一実施形態を示すシステム構成図である。
【図2】本発明によるGPS測位精度早期安定化方法の一実施形態による動作を説明するための模式図である。
【符号の説明】
【0045】
100:構造物
101:リピータ(中継装置)
102:GPSアンテナ
103:リピータアンテナ
104:出口(構造物の出口)
200:移動体
210:GPS受信機
211:GPSアンテナ
212:電波捕捉部
213:位置算出部
201:GPS衛星
202:歩道橋・トンネル
211:GPSアンテナ
221、231、241:自動車
L:道路
【特許請求の範囲】
【請求項1】
移動体に装備したGPS測位システムのGPS測位精度早期安定化方法であって、
前記移動体が走行する道路上にある構造物の出口の近傍にGPS電波中継用の手段を設け、
前記移動体が前記構造物の出口の近傍にさしかかった際、前記移動体に装備したGPS測位システムによる測位処理が予め開始させられているようにしたことを特徴とするGPS測位精度早期安定化方法。
【請求項1】
移動体に装備したGPS測位システムのGPS測位精度早期安定化方法であって、
前記移動体が走行する道路上にある構造物の出口の近傍にGPS電波中継用の手段を設け、
前記移動体が前記構造物の出口の近傍にさしかかった際、前記移動体に装備したGPS測位システムによる測位処理が予め開始させられているようにしたことを特徴とするGPS測位精度早期安定化方法。
【図1】


【図2】
【図2】
【公開番号】特開2007−93436(P2007−93436A)
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願番号】特願2005−284438(P2005−284438)
【出願日】平成17年9月29日(2005.9.29)
【出願人】(502129933)株式会社日立産機システム (1,140)
【Fターム(参考)】
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願日】平成17年9月29日(2005.9.29)
【出願人】(502129933)株式会社日立産機システム (1,140)
【Fターム(参考)】
[ Back to top ]