
GPS測定システムおよびGPS測位方法
【課題】測位サーバが測位端末の位置を精度よく算出することができる、GPS測位システムおよびGPS測定方法を提供する。
【解決手段】無線基地局装置30は、フレーム番号を付与した同報フレームを測位端末装置10および測位サーバ装置20に送信し、測位端末装置は、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現するワードの先頭ビットの先頭C/Aコードに関する位相制御量を該台数分取得し、該位相制御量とフレーム番号とを無線基地局を介して測位サーバ装置に送信し、測位サーバ装置は、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号と第2のGPS受信機から取得した航法メッセージ情報とから、先頭C/Aコードを特定し、送信時刻と該時刻における衛星位置とを求め、測位演算を行う。
【解決手段】無線基地局装置30は、フレーム番号を付与した同報フレームを測位端末装置10および測位サーバ装置20に送信し、測位端末装置は、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現するワードの先頭ビットの先頭C/Aコードに関する位相制御量を該台数分取得し、該位相制御量とフレーム番号とを無線基地局を介して測位サーバ装置に送信し、測位サーバ装置は、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号と第2のGPS受信機から取得した航法メッセージ情報とから、先頭C/Aコードを特定し、送信時刻と該時刻における衛星位置とを求め、測位演算を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GPS(Global Positioning System )衛星からそれぞれ航法メッセージを受信する測位端末と測位サーバがネットワークを介して接続され、測位端末の位置を測位サーバで算出するネットワークアシスト型のGPS測位システムおよびGPS測定方法に関する。
【背景技術】
【0002】
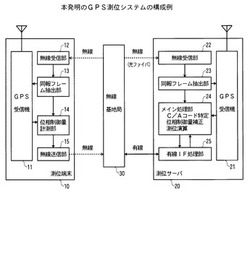
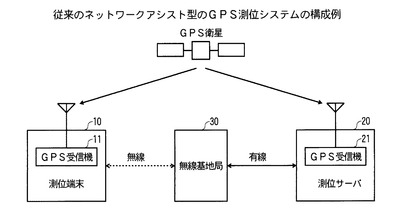
図11は、従来のネットワークアシスト型のGPS測位システムの構成例を示す。
図11において、測位端末10はGPS受信機11を備え、測位要求があるとGPS受信機11は航法メッセージの受信動作を開始し、受信した航法メッセージから信号処理した測位データを無線ネットワークを介して無線基地局30に送信する。無線基地局30は、測位サーバ20と有線ネットワークで接続され、測位端末10から受信した測位データを測位サーバ20に送信する。測位サーバ20はGPS受信機21を備え、常時航法メッセージを受信している。測位サーバ20は、測位端末10の測位データと、GPS受信機21で受信する航法メッセージから測位演算を行い、測位端末10の位置を算出する。
【0003】
ここで、GPS受信機11,21は、4つのGPS衛星から送信される航法メッセージ(GPSにおいて測位のための計算等に必要とされる衛星の軌道情報)を元に測位を行う。ネットワークアシスト型のGPS測位システムでは、測位サーバ20がエリア内で受信可能なGPS衛星を指定する衛星捕捉情報を生成し、測位端末20が無線基地局30を介して測位サーバ20から衛星捕捉情報を受け取り、その衛星捕捉情報を用いて受信対象となるGPS衛星を特定し、GPS受信機11はより短い受信時間で測位データを取得できる。
【0004】
例えば、特許文献1に記載の方法では、測位サーバ20が全てのGPS衛星の大まかな軌道を示すアルマナックデータを一定頻度で更新しており、アルマナックデータから当該測位サーバ20から受信可能なGPS衛星を特定し、その衛星IDを配下の測位端末10に向けて同報する。測位端末10は、受信可能なGPS衛星の衛星IDを取得することにより、即座にこの測位端末10から受信可能なGPS衛星の正確な軌道を示すエフェメリスデータの受信が可能となる。このように、測位端末10が即座に測位に用いるGPS衛星の選択ができることから、測位端末10における測位処理の負荷軽減が可能になっている。
【0005】
測位端末10は、衛星IDに対応するPRN(Pseudo Random Noise )コードとの相関ピークを探し、少なくとも4つの衛星の航法メッセージに関する相関ピークの時間差を計測する。さらに、受信したエフェメリスデータから送信時刻情報を取得し、データ送信時刻を特定する。測位サーバ20では、この測位データの送信時刻とエフェメリスデータから、データ送信時のGPS衛星の位置を計算するとともに、少なくとも4つGPS衛星の相関ピークに関する時間差情報を用いて、測位端末10の位置(x,y,z)と、測位端末10とGPS衛星間の時刻差Δtを未知数とするいわゆる最小二乗法などの方法により計算する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−43127号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
測位端末10は、測位データとして各衛星の位相制御量とその時の自時計の時刻および位相制御量を計測した航法メッセージのデータの位置を特定可能なビットパターンで送信する。位相制御量は、特定ビットの先頭C/A(Coarse/Acquisition )コードのようにデータの区切りのよい位置に着目し、各衛星について同じ送信時刻に相当するC/Aコードの相関ピーク取得時刻の時間差を測位データとして用いる。
【0008】
測位サーバ20は、常時受信しているビットパターンからデータを取得した時刻前後のデータについて航法メッセージのパターンマッチングを行い、位相制御量を取得したC/Aコードの位置を特定し、航法メッセージのサブフレーム先頭の時刻情報から当該C/Aコードの送信時刻を特定する。これによりC/Aコード送信時の衛星位置を特定する。
【0009】
測位端末10が相関ピークの取得を行ったC/Aコードについて、航法メッセージにおける位置を特定するためにビットパターンを各衛星分取得する必要がある。測位サーバ20がパターンマッチングを正しく行うためには数10ビット程度の情報が必要であり、これらの情報を測位サーバ20に送る必要がある。
【0010】
本発明は、ネットワークアシスト型のGPS技術において、測位端末の受信動作により取得した少量の測位データを元に、測位サーバが測位端末の位置を精度よく算出することができるGPS測位システムおよびGPS測定方法に関する。
【課題を解決するための手段】
【0011】
第1の発明のGPS測位システムは、第1のGPS受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、無線基地局装置は、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に測位端末装置および測位サーバ装置に送信する手段を備え、測位端末装置は、無線基地局装置から同報フレームを受信するとともに、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現するワードの先頭ビットの先頭C/Aコードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ワードの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを無線基地局を介して測位サーバ装置に送信する手段を備え、測位サーバ装置は、無線基地局装置から同報フレームを受信するとともに、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号または時刻情報と第2のGPS受信機から取得した航法メッセージ情報とから、測位端末装置が位相制御量の取得に利用したワードおよび該ワードの先頭ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と測位端末装置から受信した位相制御量とを用いて測位演算を行う手段を備える。
【0012】
第2の発明のGPS測位システムは、第1のGPS受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、無線基地局装置は、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に測位端末装置および測位サーバ装置に送信する手段を備え、測位端末装置は、無線基地局装置から同報フレームを受信するとともに、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現するビットの先頭C/Aコードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ビットの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを無線基地局を介して測位サーバ装置に送信する手段を備え、測位サーバ装置は、無線基地局装置から同報フレームを受信するとともに、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号または時刻情報と第2のGPS受信機から取得した航法メッセージ情報とから、測位端末装置が位相制御量の取得に利用したビットおよび該ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と測位端末装置から受信した位相制御量とを用いて測位演算を行う手段を備える。
【0013】
第3の発明のGPS測位システムは、第1のGPS受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、無線基地局装置は、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に測位端末装置および測位サーバ装置に送信する手段を備え、測位端末装置は、無線基地局装置から同報フレームを受信するとともに、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現する先頭C/Aコードに関する1ms(ミリ秒)未満の位相制御量を該台数分取得し、該位相制御量と該C/Aコードと同じタイミングの同報フレームのフレーム番号または時刻情報とを無線基地局を介して測位サーバ装置に送信する手段を備え、測位サーバ装置は、無線基地局装置から同報フレームを受信するとともに、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号または時刻情報と第2のGPS受信機から取得した航法メッセージ情報とから、測位端末装置が位相制御量の取得に利用したC/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と測位端末装置から受信した位相制御量とを用いて測位演算を行う手段を備える。
【0014】
第3の発明のGPS測位システムにおいて、測位サーバは、位置が既知である無線基地局装置の無線エリアに属する参照点の位置情報とC/Aコード送信時の衛星位置との間の距離を光速で割った概略到達時間を算出し、該概略到達時間から衛星と測位端末装置間の到達時間の1ms以上の量を特定し、1ms未満の量は測位端末装置が取得した位相制御量の情報により補正することにより衛星と測位端末装置間の正確な到達所要時間を算出し、該到達所用時間を利用して測位端末装置の測位演算を行う手段を含む。
【0015】
第1の発明のGPS測位システムにおいて、測位端末装置は、検知した同報フレームの切り替りタイミングと受信した全衛星の航法メッセージのワードの切り替りタイミングとの間に所定の時間差がない場合は、同報フレームの切り替りタイミングに対して 300ms相当のオフセット量を遅延させたタイミングを新たな判定タイミングとし、オフセットの有無の情報を位相制御量と同報フレームのフレーム番号または時刻情報とともに測位サーバ装置に送信する手段を含む。
【0016】
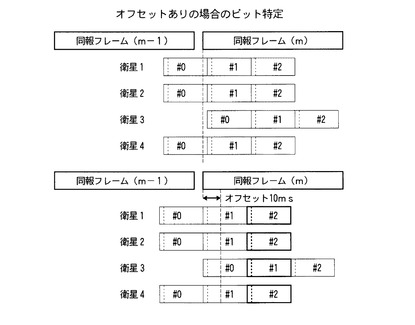
第2の発明のGPS測位システムにおいて、測位端末装置は、検知した同報フレームの切り替りタイミングと受信した全衛星の航法メッセージのビットの切り替りタイミングとの間に所定の時間差がない場合は、同報フレームの切り替りタイミングに対して10ms相当のオフセット量を遅延させたタイミングを新たな判定タイミングとし、オフセットの有無の情報を位相制御量と同報フレームのフレーム番号または時刻情報とともに測位サーバ装置に送信する手段を含む。
【0017】
第3の発明のGPS測位システムにおいて、測位端末装置は、検知した同報フレームの切り替りタイミングと受信した全衛星の航法メッセージのC/Aコードの切り替りタイミングとの間に所定の時間差がない場合は、同報フレームの切り替りタイミングに対して 500μs相当のオフセット量を遅延させたタイミングを新たな判定タイミングとし、オフセットの有無の情報を位相制御量と同報フレームのフレーム番号または時刻情報とともに測位サーバ装置に送信する手段を含む。
【0018】
第1〜第3の発明のGPS測位システムにおいて、測位サーバ装置は、GPS受信状態を観測して測位端末装置が受信可能なGPS衛星をあらかじめ決めた台数選定し、この選定した台数分のGPS衛星の情報を無線基地局装置を介して測位端末装置に送信する手段を含み、測位端末装置は、選定した台数分のGPS衛星の情報を受信して第1のGPS受信機を起動し、選定した台数分のGPS衛星の航法メッセージの受信動作を開始し、該台数分の位相制御量の取得を完了したことをもって第1のGPS受信機の動作を停止する手段を含む。
【0019】
第4の発明のGPS測位方法は、第1のGPS受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、無線基地局装置が、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に測位端末装置および測位サーバ装置に送信し、測位端末装置が、無線基地局装置から同報フレームを受信するとともに、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現するワードの先頭ビットの先頭C/Aコードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ワードの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを無線基地局を介して測位サーバ装置に送信し、測位サーバ装置が、無線基地局装置から同報フレームを受信するとともに、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号または時刻情報と第2のGPS受信機から取得した航法メッセージ情報とから、測位端末装置が位相制御量の取得に利用したワードおよび該ワードの先頭ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と測位端末装置から受信した位相制御量とを用いて測位演算を行う。
【0020】
第5の発明のGPS測位方法は、第1のGPS受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、無線基地局装置が、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に測位端末装置および測位サーバ装置に送信し、測位端末装置が、無線基地局装置から同報フレームを受信するとともに、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現するビットの先頭C/Aコードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ビットの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを無線基地局を介して測位サーバ装置に送信し、測位サーバ装置が、無線基地局装置から同報フレームを受信するとともに、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号または時刻情報と第2のGPS受信機から取得した航法メッセージ情報とから、測位端末装置が位相制御量の取得に利用したビットおよび該ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と測位端末装置から受信した位相制御量とを用いて測位演算を行う。
【0021】
第6の発明のGPS測位方法は、第1のGPS受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、無線基地局装置が、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に測位端末装置および測位サーバ装置に送信し、測位端末装置が、無線基地局装置から同報フレームを受信するとともに、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現する先頭C/Aコードに関する1ms(ミリ秒)未満の位相制御量を該台数分取得し、該位相制御量と該C/Aコードと同じタイミングの同報フレームのフレーム番号または時刻情報とを無線基地局を介して測位サーバ装置に送信し、測位サーバ装置が、無線基地局装置から同報フレームを受信するとともに、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号または時刻情報と第2のGPS受信機から取得した航法メッセージ情報とから、測位端末装置が位相制御量の取得に利用したC/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と測位端末装置から受信した位相制御量とを用いて測位演算を行う。
【発明の効果】
【0022】
本発明は、位相制御量の取得に用いたC/Aコードの特定に無線基地局装置から単位時間毎に送信される同報フレームを用いる。測位端末装置は、同報フレームの切り替りタイミング後の最初の1ワード目または最初の1ビット目の先頭C/Aコードに着目してmsオーダの位相制御量を取得し、ワードの先頭またはビットの先頭と同じタイミングの同報フレームのフレーム番号を位相制御量とあわせて測位サーバ装置に送信する。測位サーバ装置は、同報フレームを常時受信しており、測位端末装置から取得したフレーム番号をもとに、航法メッセージにおける測位データ取得に用いたC/Aコードの位置を特定する。特定したC/Aコードから送信時刻を逆算し衛星位置を算出し、測位サーバ装置の位置座標をもとに測位端末装置から送信された位相制御量の補正を行い、補正した位相制御量をもとに測位演算を行う。
【0023】
これにより、測位端末装置で航法メッセージを受信する時間を短縮し、かつ測位端末装置から測位サーバ装置に送信するC/Aコードを特定するための情報を短縮しながら、精度のよい測定処理を行うことができる。
【図面の簡単な説明】
【0024】
【図1】本発明のGPS測位システムの構成例を示す図である。
【図2】本発明のGPS測位システムの測位シーケンス例を示す図である。
【図3】測位端末10のGPS受信機11の動作例を示すタイミングチャートである。
【図4】ワード同期の場合の同報フレームと計測対象のC/Aコードの関係を示す図である。
【図5】測位端末10と測位サーバ20におけるワード特定を説明する図である。
【図6】ビット同期の場合の同報フレームと計測対象のC/Aコードの関係を示す図である。
【図7】測位端末10と測位サーバ20におけるビット特定を説明する図である。
【図8】オフセットありの場合のビット特定を説明する図である。
【図9】同報フレームと計測対象のC/Aコードの関係を示す図である。
【図10】測位端末10と測位サーバ20におけるC/Aコード特定を説明する図である。
【図11】従来のネットワークアシスト型のGPS測位システムの構成例を示す図である。
【発明を実施するための形態】
【実施例1】
【0025】
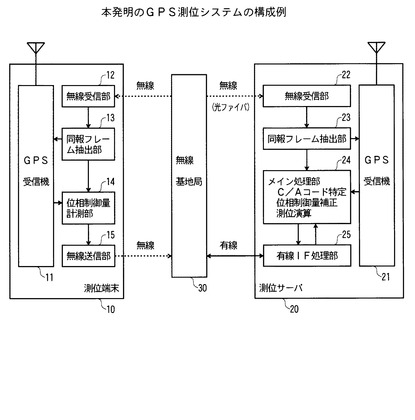
図1は、本発明のGPS測位システムの構成例を示す。
図1において、本発明のGPS測位システムは、測位端末10、測位サーバ20、無線基地局30から構成される。測位端末10は、GPS受信機11、無線受信部12、同報フレーム13、位相制御量計測部14、無線送信部15を備える。測位サーバ20は、GPS受信機21、無線受信部22、同報フレーム抽出部23、メイン処理部24、有線IF処理部25を備える。
【0026】
測位端末10は、無線受信部12および無線送信部15を介して無線基地局30と通信を行うことができる。測位サーバ20は、無線受信部22および有線IF処理部25を介して無線基地局30と通信を行うことができる。無線基地局30は、同報フレームを単位時間毎に送信しており、測位端末10は無線受信部12を介して同報フレーム抽出部13で同報フレームを受信し、測位サーバ20は無線受信部22を介して同報フレーム抽出部23で同報フレームを受信する。なお、本実施例では同報フレームは無線基地局30から無線通信により測位端末10および測位サーバ20に一斉に同報されることとしているが、測位サーバ20に対しては伝送遅延の小さい光ファイバを用いて同報フレームを同報する構成であってもよい。
【0027】
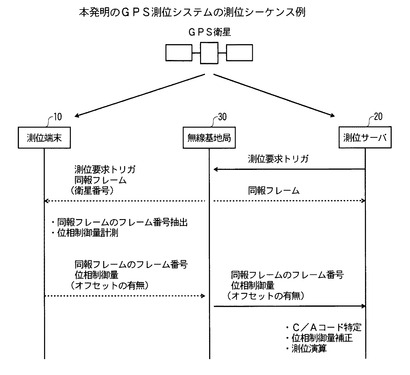
図2は、本発明のGPS測位システムの測位シーケンス例を示す。
測位サーバ20のGPS受信機21は、航法メッセージを常時受信している。測位端末10は、測位サーバ20から無線基地局30を介して受信する測位要求トリガによりGPS受信機11の受信動作を開始する。このとき、受信可能な衛星候補の情報(衛星番号)を測位サーバ20から受け取ってもよい。測位サーバ20はアルマナックデータから衛星の概位置を算出し、そのエリア内で良好な条件で受信可能な衛星を特定し、指定された台数(N1台)分の衛星情報を予備情報として測位端末10に送信してもよい。ここで、一般に4台の衛星が受信できれば測位演算が可能であるが、一時的に衛星が物陰に隠れて受信不可となる場合も考えられるため、N1は安全をみて測位可能な最低受信台数の4台より大きい台数が選ばれる。
【0028】
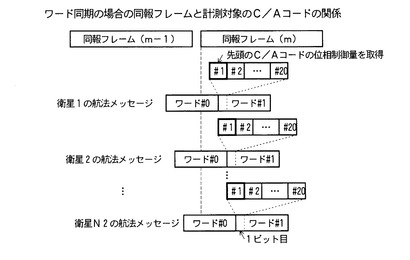
実施例1では、GPS受信機11がワード同期機能を備えている場合を想定する。一般に、GPS受信機は電源ONからワード同期を維持した航法メッセージの安定受信動作までにはしばらく時間(数10ms以上)を要する。1ワード(30ビット)の長さは 600msであり、衛星間の航法メッセージの到達時間差は高々20ms程度であるため、ワード同期が取れている受信状態では衛星間で送信時刻が同じワードを特定することができるため、すべての衛星について同一時刻に送信されたワードに関する先頭ビットの先頭C/Aコードを捕らえることができる。
【0029】
測位端末10の位相制御量計測部14は、測位サーバ20より報知された候補衛星について受信を開始し、ワードの先頭ビットの先頭C/Aコードに着目して1ワードの区切り時間である 600ms刻みで位相制御量を取得する。
【0030】
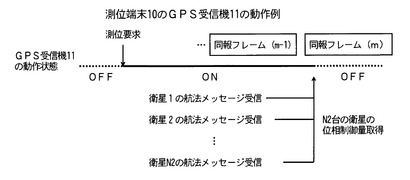
図3は、位相制御量取得時のGPS受信機11の動作状態を示す。
図4は、ワード同期の場合の同報フレームと計測対象C/Aコードの関係を示す。
ここでは、同報フレームの切り替りタイミング後最初のワードの先頭ビットの先頭C/Aコードで位相制御量を取得する様子を示す。このとき、同報フレームの切り替り後最初受信できたすべての衛星に関する同一時刻に送信されたワードに着目して位相制御量を取得する。このとき、測位端末10の内部時計として同報フレームに同期した時計を用いてもよい。衛星間の位相制御量の時間差が20ms以内かどうかで同一時刻に送信されたワードであるか否かを判定できる。
【0031】
GPS受信機11の安定受信後、最初の同報フレームの切り替りのタイミングの直後の航法メッセージのワードの先頭ビットの先頭C/Aコードの位相制御量をN2台分取得する。N2台分の衛星の位相制御量が計測できた段階でGPS受信機11は受信動作を停止し、待機モードに入る。一般に衛星台数が多いほど測位精度は向上するため、N2は、GPS受信機11の動作時間や測位データ量などの測位コストと測位精度のトレードオフ関係を考慮して4≦N2≦N1から決めることになる。
【0032】
測位端末10の位相制御量計測部14は、位相制御量を取得した時点の同報フレームのフレーム番号(図4の例ではフレーム番号m)と、N2台分の衛星の位相制御量を無線送信部15から無線基地局30を介して測位サーバ20に送信する。
【0033】
測位サーバ20に備わるGPS受信機21もワード同期機能を備えているとする。測位サーバ20のメイン処理部24は、同報フレーム抽出部23で受信した同報フレームの切り替りタイミングを識別し、m番目のフレーム番号の同報フレームに切り替った時刻以降で最初のワードの先頭ビットの先頭C/Aコードを識別する。C/Aコードが特定できれば、サブフレーム先頭に含まれるHOW値からそのサブフレームの送信時刻がわかるため、サブフレーム先頭からのオフセットを計算することにより、該ワードの先頭C/Aコードの送信時刻を特定することができる。
【0034】
GPS受信機21は、衛星間でもワード同期を維持しているとし、着目するワードはすべての衛星が同一時刻に送信されたものとする。
【0035】
メイン処理部24は、サブフレーム先頭から数えて何番目のC/AコードかをカウントすることによりC/Aコードが送信された時刻を特定できる。この時刻からC/Aコードを送信した時の衛星の位置をエフェメリスデータから計算できる。
【0036】
N2台の衛星位置(xi ,yi ,zi )を特定できれば、測位端末10の位置座標(x,y,z)と時計誤差Δtを未知数として
(x−x1)2 +(y−y1)2 +(z−z1)2 =c2(Δ1 −Δt)2
…
(x−xN2)2+(y−yN2)2+(z−zN2)2=c2(ΔN2−Δt)2
が成り立つ。なお、Δi は測位端末10で取得したi番目の衛星の位相制御量である。
【0037】
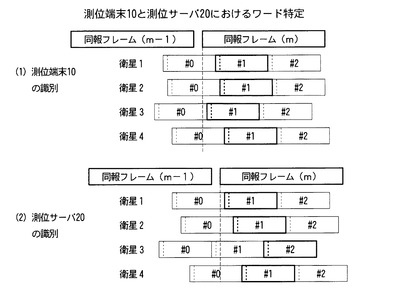
ここで、同報フレームのジッタや測位端末10に到着する航法メッセージと、測位サーバ20に到着する航法メッセージとの間の時間差が原因となって、m番目の同報フレームの切り替りタイミングから判定されるC/Aコードと位相制御量を取得したC/Aコードとを1ワード分ずれた位置で識別してしまう可能性がある。すなわち、1ワード前後のワードを識別してしまう可能性がある。
【0038】
この様子を図5に示す。この例では、測位端末10と測位サーバ20の同報フレームの到達時刻差により、測位端末10では衛星3について#1のワードを識別しているが、測位サーバ20では#2のワードを識別している。測位サーバ20が1ワード分ずれて識別した場合、正しく識別した場合から 600msの時間差が生じる。衛星は約 3.4km/s程度の速度で地球上を周回しているため、この間に約2km程度移動することになる。本来の衛星位置から約2km程度ずれた位置情報をもとに測位演算を行う、測位演算の結果得られた端末位置10は、無線エリアの半径を 1.5km程度とすると無線エリアから外れたり想定外の高度が得られたりすることが考えられる。このように誤って識別したワードから測位演算した結果は不適切な解として除外することができる。
【0039】
ワードの誤識別を回避する別の方法を以下に説明する。この場合、測位端末10が同報フレームの切り替りタイミングから前後に最も大きいマージンを持つ衛星の航法メッセージを基準にすることによって残りのワードの誤識別を回避できる。図5の例では、これを衛星4とする。衛星4の位相制御量Δ4 を基準とする。測位サーバ20は十分な判定マージンを有する衛星4のワードについては正しく識別することができるとする。残りの衛星1,2,3のワードの特定は、Δ1 −Δ4 、Δ2 −Δ4 、Δ3 −Δ4 を手掛かりに判定することができる。
【0040】
いま、測位サーバ20で取得したi番目の衛星の位相制御量をΔ'iと表記する。例えば図5において、測位サーバ20が衛星3のワード#2を識別した場合、測位サーバ20から見た位相制御量Δ'3−Δ'4の値がΔ3 −Δ4 と比較して大幅に異なる場合は、誤ってワード#2を識別していると判断できる。このようにしてワード#1を候補として絞り込むことができる。
【0041】
ここで、測位端末10において、たまたま全衛星のワードの先頭が同報フレームの切り替りとほぼ同じタイミングだった場合の対処について説明する。この場合は、同報フレームから例えば 600msの半分の 300msのオフセット後の時刻を新たな判定タイミングとして、このタイミング以降最初のワードを識別することによって、測位サーバ側で識別するワードずれを回避できる。オフセットの有無はフレーム番号および位相制御量の情報と一緒に測位サーバ20に送信する。
【0042】
GPS受信機11がワード同期機能を持つ場合は、 600ms単位で航法メッセージのワードを特定できればよいため、無線基地局30が送信する同報フレームがジッタなどの影響で測位端末10と測位サーバ20に到達する時刻に比較的大きな差が生じる場合でも対応できる。
【実施例2】
【0043】
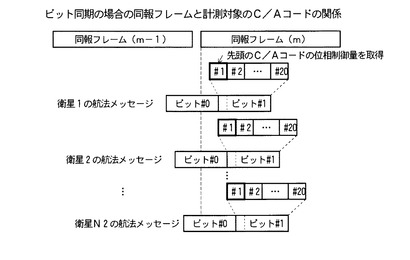
実施例2では、GPS受信機11がワード同期機能を備えずビット同期機能のみを備える場合を扱う。ワード同期には長い時間の受信動作が必要であるが、ビット同期のみであればより短時間で安定受信動作が可能である。ただし、ビット区切りは20ms単位であり、衛星位置による航法メッセージの到着時間差も20ms程度あるため、衛星間でビット同期を取ることはできない。ビット同期の場合の同報フレームと計測対象C/Aコードの関係を図6に示す。
【0044】
測位端末10は、同報フレームの切り替りタイミング以降の最初のビットの先頭C/Aコードについて、ビットの時間単位である20ms毎に位相制御量を取得する。位相制御量の値は0ms以上20ms未満となる。
【0045】
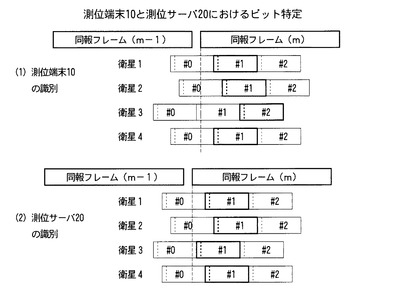
図7に示すように、フレームの切り替りタイミングのずれの影響で測位サーバ20が測位端末10とは異なるビットを識別してしまう場合がある。この場合、測位端末10が同報フレームの切り替りタイミングから前後に最も大きいマージンを持つ衛星の航法メッセージを基準にすることによって残りのビットの誤識別を回避できる。図7の例ではこれを衛星2とする。衛星2の位相制御量Δ2 を基準とする。測位サーバ20は十分な判定マージンを有する衛星2のビットについては正しく識別することができるとする。残りの衛星1,3,4のビットの特定は、Δ1 −Δ2 、Δ3 −Δ2 、Δ4 −Δ2 を手掛かりに判定することができる。例えば、図7において、測位サーバ20が衛星3のビット#1を識別した場合、測位サーバ20から見た位相制御量Δ'3−Δ'2の値がΔ3 −Δ2 と比較して大幅に異なる場合は、誤ってビットを識別していると判断できる。すなわち、ビット#2を候補として絞り込むことができる。
【0046】
ビットが特定できれば、サブフレーム先頭に含まれるHOW値からそのサブフレームの送信時刻がわかるため、サブフレーム先頭からのオフセットを計算することにより、該ビットの先頭C/Aコードの送信時刻を特定することができる。
【0047】
ここで、測位端末10において、図8(1) に示すように、たまたま全衛星のビットの先頭が同報フレームの切り替りとほぼ同じタイミングだった場合の対処について説明する。図8(2) に示すように、この場合は、同報フレームから例えば20msの半分の10msのオフセット後の時刻を新たな判定タイミングとして、このタイミング以降最初のビットを識別することによって、測位サーバ20側で識別するビットずれを回避できる。オフセットの有無はフレーム番号および位相制御量の情報と一緒に測位サーバ10に送信する。
【0048】
なお、測位端末10と測位サーバ20間、すなわちGPS受信機11とGPS受信機21の距離が数百km離れていたとしても、航法メッセージの到着時間差に換算すると1 〜2 ms程度と考えられるため、上に述べた方法でビットの誤識別を回避できる。
【0049】
また、図7の例では衛星3のみ他の衛星より1ビット遅れた航法メッセージから位相制御量を取得しているが、20ms間の間に測位端末が移動する距離はほとんど無視できる程度(時速 100km/hで移動していても約50cm)なので、よい近似で
(x−x1)2 +(y−y1)2 +(z−z1)2 =c2(Δ1 −Δt)2
…
(x−xN2)2+(y−yN2)2+(z−zN2)2=c2(ΔN2−Δt)2
が成り立つとしてよい。
【0050】
本実施例においては、ジッタ等の影響による測位端末10、測位サーバ20間の同報フレームの到着時間差は、実施例1に比較すると厳しい条件となる。
【実施例3】
【0051】
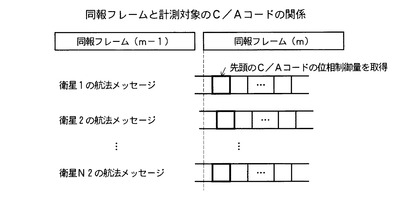
実施例3では、GPS受信機11がワード同期機能およびビット同期機能を備えておらず、1ms単位のC/Aコードに関する位相制御量を取得する機能のみを備えている場合に相当する。GPS受信機11は機能的に最も簡単な構造となる。したがって、ワード同期やビット同期に基づいた測位方法に比べると、GPS受信機11の安定受信動作に要する時間はより短時間で済む。同報フレームと計測対象C/Aコードの関係を図9に示す。
【0052】
測位端末10は同報フレームの切り替りタイミング直後のC/Aコードについて、C/Aコードの刻み幅である1msを基準に取得した1ms未満の量(Δi とする)を取得する。ms未満の量のみを測位サーバに送信すればよいため、無線ネットワークの帯域を節約できる。
【0053】
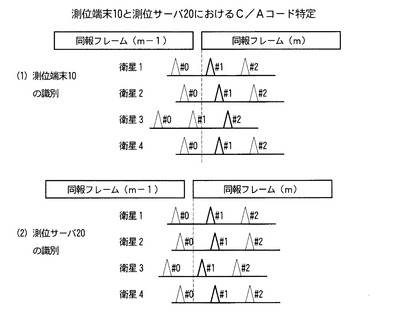
図10に示すように、フレームの切り替りタイミングのずれの影響で測位サーバ20が測位端末10とは異なるC/Aコードを識別してしまう場合がある。この場合、測位端末10が同報フレームの切り替りタイミングから前後に最も大きいマージンを持つ衛星の航法メッセージを基準にすることによって、残りのC/Aコードの誤識別を回避できる。図10の例ではこれを衛星2とし、測位サーバ20は十分な判定マージンを有する衛星2のC/Aコードについては正しく識別することができるとする。このときの衛星2の位相制御量Δ2 を基準とすると、残りの衛星1,3,4のC/Aコードの特定は、Δ1 −Δ2 、Δ3 −Δ2 、Δ4 −Δ2 を手掛かりに判定することができる。
【0054】
例えば図10において、測位サーバ20が衛星3のC/Aコードを#1として識別した場合、測位サーバ20から見た位相制御量Δ'3−Δ'2の値がΔ3 −Δ2 と比較して大幅に異なる場合は、誤ってC/Aコードを識別していると判断できる。すなわち、C/Aコード#2を候補として絞り込むことができる。C/Aコードが特定できれば、サブフレーム先頭に含まれるHOW値からそのサブフレームの送信時刻がわかるため、サブフレーム先頭からのオフセットを計算することにより、該C/Aコードの送信時刻を特定することができる。
【0055】
この処理を行うためには、測位端末10と測位サーバ20間の距離は航法メッセージの到達時間差にして1msよりも十分小さいことが必要となる。これは距離に換算すると、数十km程度となる(時間差 100μsを許容する場合、約30km)。したがって、実施例1,2に比べると、より密な間隔で測位サーバ20もしくはGPS受信機21を設置する必要がある。
【0056】
ここで、測位端末10において、たまたま全衛星のC/Aコードが同報フレームの切り替りとほぼ同じタイミングだった場合の対処について説明する。この場合は、同報フレームから例えば1msの半分の 500μsのオフセット後の時刻を新たな判定タイミングとして、このタイミング以降最初のC/Aコードを識別することによって、測位サーバ20側で識別するC/Aコードずれを回避できる。オフセットの有無はフレーム番号および位相制御量の情報と一緒に測位サーバ20に送信する。
【0057】
また、測位サーバ20は測位演算を行うために、1ms未満の位相制御量Δi からmsのオーダの量を含む位相制御量に復元する必要がある。上に述べた方法により各衛星の航法メッセージのC/Aコード位置を特定できたなら、そのC/Aコードを送信したGPS時刻を特定し、このときの衛星位置をエフェメリスデータから計算する。
【0058】
ここで、測位端末10は特定の無線基地局30に属するカバーエリア内に位置するとし、ひとつのカバーエリアの広さは高々数kmもしくは数十km程度であるとする。無線基地局30のカバーエリア内の中心付近に位置が既知のリファレンス地点があるとすると、上記C/Aコード送信時の衛星iの位置とリファレンス地点間の距離は計算可能であるので、この距離を光速で割った値δi を求める。上記C/Aコード送信時の衛星iの位置と測位端末間の擬似距離をc×di (cは光速) とすると、測位端末10とリファレンス地点間の距離は光速換算の1msに相当する 300km以下であるため、δi とdi の差は1ms未満のはずである。なお、di は、測位端末10で取得した衛星iのms未満の位相制御量Δi を測位サーバ20がmsのオーダまで考慮して変換した補正後の位相制御量である。
【0059】
いま、測位端末10が取得した1ms未満の位相制御量をΔ1<Δ2<Δ3<Δ4とする。またδi について、1ms未満を切り捨てた量をu(δi)、1ms未満の量をv(δi)とする。すなわち、δi =u(δi)+v(δi)である。ここで、測位演算に用いる擬似距離については共通の量を加減しても測位結果には影響がないため、δiから共通の量v(δi)を引いた値をδ'iとする。
δ'1=δ1 −v(δ1)=u(δ1)
δ'2=δ2 −v(δ1) δ'3=δ3 −v(δ1) δ'4=δ4 −v(δ1)
【0060】
d1 =δ'1とすれば、d2 はms以上の量はv (δ'2) をそのまま用い、1ms未満の量v (δ'2) のみ補正が必要であるためΔ2 −Δ1 で置き換えればよい。すなわち、
d2 =δ'2−v(δ'2)+(Δ2 −Δ1 )
とすればよい。d3 ,d4 についても同様に
d3 =δ'3−v(δ'3)+(Δ3 −Δ1 )
d4 =δ'4−v(δ'4)+(Δ4 −Δ1 )
とすればよい。
【0061】
以降の処理は、実施例1と同様に測位端末10の位置座標(x,y,z)と、測位端末10の時計誤差Δtを未知数として方程式N2台の衛星位置(xi ,yi ,zi )を特定できれば、測位端末10の位置座標(x,y,z)と時計誤差Δtを未知数として
(x−x1)2 +(y−y1)2 +(z−z1)2 =c2(d1 −Δt)2
…
(x−xN2)2+(y−yN2)2+(z−zN2)2=c2(dN2−Δt)2
を立てて、これらについて解を求めればよい。
【0062】
実施例1,2と比較すると、同報フレームのジッタに伴う到達時間差の許容値はより小さくなるが、GPS受信機11がワード同期するまで待つ必要がないため、実装機能が少なくてすむ、電源ON時間が短くてすむ等のメリットがある。
【符号の説明】
【0063】
10 測位端末
11 GPS受信機
12 無線受信部
13 同報フレーム
14 位相制御量計測部
15 無線送信部
20 測位サーバ
21 GPS受信機
22 無線受信部
23 同報フレーム抽出部
24 メイン処理部
25 有線IF処理部
30 無線基地局
【技術分野】
【0001】
本発明は、GPS(Global Positioning System )衛星からそれぞれ航法メッセージを受信する測位端末と測位サーバがネットワークを介して接続され、測位端末の位置を測位サーバで算出するネットワークアシスト型のGPS測位システムおよびGPS測定方法に関する。
【背景技術】
【0002】
図11は、従来のネットワークアシスト型のGPS測位システムの構成例を示す。
図11において、測位端末10はGPS受信機11を備え、測位要求があるとGPS受信機11は航法メッセージの受信動作を開始し、受信した航法メッセージから信号処理した測位データを無線ネットワークを介して無線基地局30に送信する。無線基地局30は、測位サーバ20と有線ネットワークで接続され、測位端末10から受信した測位データを測位サーバ20に送信する。測位サーバ20はGPS受信機21を備え、常時航法メッセージを受信している。測位サーバ20は、測位端末10の測位データと、GPS受信機21で受信する航法メッセージから測位演算を行い、測位端末10の位置を算出する。
【0003】
ここで、GPS受信機11,21は、4つのGPS衛星から送信される航法メッセージ(GPSにおいて測位のための計算等に必要とされる衛星の軌道情報)を元に測位を行う。ネットワークアシスト型のGPS測位システムでは、測位サーバ20がエリア内で受信可能なGPS衛星を指定する衛星捕捉情報を生成し、測位端末20が無線基地局30を介して測位サーバ20から衛星捕捉情報を受け取り、その衛星捕捉情報を用いて受信対象となるGPS衛星を特定し、GPS受信機11はより短い受信時間で測位データを取得できる。
【0004】
例えば、特許文献1に記載の方法では、測位サーバ20が全てのGPS衛星の大まかな軌道を示すアルマナックデータを一定頻度で更新しており、アルマナックデータから当該測位サーバ20から受信可能なGPS衛星を特定し、その衛星IDを配下の測位端末10に向けて同報する。測位端末10は、受信可能なGPS衛星の衛星IDを取得することにより、即座にこの測位端末10から受信可能なGPS衛星の正確な軌道を示すエフェメリスデータの受信が可能となる。このように、測位端末10が即座に測位に用いるGPS衛星の選択ができることから、測位端末10における測位処理の負荷軽減が可能になっている。
【0005】
測位端末10は、衛星IDに対応するPRN(Pseudo Random Noise )コードとの相関ピークを探し、少なくとも4つの衛星の航法メッセージに関する相関ピークの時間差を計測する。さらに、受信したエフェメリスデータから送信時刻情報を取得し、データ送信時刻を特定する。測位サーバ20では、この測位データの送信時刻とエフェメリスデータから、データ送信時のGPS衛星の位置を計算するとともに、少なくとも4つGPS衛星の相関ピークに関する時間差情報を用いて、測位端末10の位置(x,y,z)と、測位端末10とGPS衛星間の時刻差Δtを未知数とするいわゆる最小二乗法などの方法により計算する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−43127号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
測位端末10は、測位データとして各衛星の位相制御量とその時の自時計の時刻および位相制御量を計測した航法メッセージのデータの位置を特定可能なビットパターンで送信する。位相制御量は、特定ビットの先頭C/A(Coarse/Acquisition )コードのようにデータの区切りのよい位置に着目し、各衛星について同じ送信時刻に相当するC/Aコードの相関ピーク取得時刻の時間差を測位データとして用いる。
【0008】
測位サーバ20は、常時受信しているビットパターンからデータを取得した時刻前後のデータについて航法メッセージのパターンマッチングを行い、位相制御量を取得したC/Aコードの位置を特定し、航法メッセージのサブフレーム先頭の時刻情報から当該C/Aコードの送信時刻を特定する。これによりC/Aコード送信時の衛星位置を特定する。
【0009】
測位端末10が相関ピークの取得を行ったC/Aコードについて、航法メッセージにおける位置を特定するためにビットパターンを各衛星分取得する必要がある。測位サーバ20がパターンマッチングを正しく行うためには数10ビット程度の情報が必要であり、これらの情報を測位サーバ20に送る必要がある。
【0010】
本発明は、ネットワークアシスト型のGPS技術において、測位端末の受信動作により取得した少量の測位データを元に、測位サーバが測位端末の位置を精度よく算出することができるGPS測位システムおよびGPS測定方法に関する。
【課題を解決するための手段】
【0011】
第1の発明のGPS測位システムは、第1のGPS受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、無線基地局装置は、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に測位端末装置および測位サーバ装置に送信する手段を備え、測位端末装置は、無線基地局装置から同報フレームを受信するとともに、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現するワードの先頭ビットの先頭C/Aコードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ワードの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを無線基地局を介して測位サーバ装置に送信する手段を備え、測位サーバ装置は、無線基地局装置から同報フレームを受信するとともに、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号または時刻情報と第2のGPS受信機から取得した航法メッセージ情報とから、測位端末装置が位相制御量の取得に利用したワードおよび該ワードの先頭ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と測位端末装置から受信した位相制御量とを用いて測位演算を行う手段を備える。
【0012】
第2の発明のGPS測位システムは、第1のGPS受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、無線基地局装置は、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に測位端末装置および測位サーバ装置に送信する手段を備え、測位端末装置は、無線基地局装置から同報フレームを受信するとともに、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現するビットの先頭C/Aコードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ビットの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを無線基地局を介して測位サーバ装置に送信する手段を備え、測位サーバ装置は、無線基地局装置から同報フレームを受信するとともに、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号または時刻情報と第2のGPS受信機から取得した航法メッセージ情報とから、測位端末装置が位相制御量の取得に利用したビットおよび該ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と測位端末装置から受信した位相制御量とを用いて測位演算を行う手段を備える。
【0013】
第3の発明のGPS測位システムは、第1のGPS受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、無線基地局装置は、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に測位端末装置および測位サーバ装置に送信する手段を備え、測位端末装置は、無線基地局装置から同報フレームを受信するとともに、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現する先頭C/Aコードに関する1ms(ミリ秒)未満の位相制御量を該台数分取得し、該位相制御量と該C/Aコードと同じタイミングの同報フレームのフレーム番号または時刻情報とを無線基地局を介して測位サーバ装置に送信する手段を備え、測位サーバ装置は、無線基地局装置から同報フレームを受信するとともに、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号または時刻情報と第2のGPS受信機から取得した航法メッセージ情報とから、測位端末装置が位相制御量の取得に利用したC/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と測位端末装置から受信した位相制御量とを用いて測位演算を行う手段を備える。
【0014】
第3の発明のGPS測位システムにおいて、測位サーバは、位置が既知である無線基地局装置の無線エリアに属する参照点の位置情報とC/Aコード送信時の衛星位置との間の距離を光速で割った概略到達時間を算出し、該概略到達時間から衛星と測位端末装置間の到達時間の1ms以上の量を特定し、1ms未満の量は測位端末装置が取得した位相制御量の情報により補正することにより衛星と測位端末装置間の正確な到達所要時間を算出し、該到達所用時間を利用して測位端末装置の測位演算を行う手段を含む。
【0015】
第1の発明のGPS測位システムにおいて、測位端末装置は、検知した同報フレームの切り替りタイミングと受信した全衛星の航法メッセージのワードの切り替りタイミングとの間に所定の時間差がない場合は、同報フレームの切り替りタイミングに対して 300ms相当のオフセット量を遅延させたタイミングを新たな判定タイミングとし、オフセットの有無の情報を位相制御量と同報フレームのフレーム番号または時刻情報とともに測位サーバ装置に送信する手段を含む。
【0016】
第2の発明のGPS測位システムにおいて、測位端末装置は、検知した同報フレームの切り替りタイミングと受信した全衛星の航法メッセージのビットの切り替りタイミングとの間に所定の時間差がない場合は、同報フレームの切り替りタイミングに対して10ms相当のオフセット量を遅延させたタイミングを新たな判定タイミングとし、オフセットの有無の情報を位相制御量と同報フレームのフレーム番号または時刻情報とともに測位サーバ装置に送信する手段を含む。
【0017】
第3の発明のGPS測位システムにおいて、測位端末装置は、検知した同報フレームの切り替りタイミングと受信した全衛星の航法メッセージのC/Aコードの切り替りタイミングとの間に所定の時間差がない場合は、同報フレームの切り替りタイミングに対して 500μs相当のオフセット量を遅延させたタイミングを新たな判定タイミングとし、オフセットの有無の情報を位相制御量と同報フレームのフレーム番号または時刻情報とともに測位サーバ装置に送信する手段を含む。
【0018】
第1〜第3の発明のGPS測位システムにおいて、測位サーバ装置は、GPS受信状態を観測して測位端末装置が受信可能なGPS衛星をあらかじめ決めた台数選定し、この選定した台数分のGPS衛星の情報を無線基地局装置を介して測位端末装置に送信する手段を含み、測位端末装置は、選定した台数分のGPS衛星の情報を受信して第1のGPS受信機を起動し、選定した台数分のGPS衛星の航法メッセージの受信動作を開始し、該台数分の位相制御量の取得を完了したことをもって第1のGPS受信機の動作を停止する手段を含む。
【0019】
第4の発明のGPS測位方法は、第1のGPS受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、無線基地局装置が、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に測位端末装置および測位サーバ装置に送信し、測位端末装置が、無線基地局装置から同報フレームを受信するとともに、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現するワードの先頭ビットの先頭C/Aコードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ワードの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを無線基地局を介して測位サーバ装置に送信し、測位サーバ装置が、無線基地局装置から同報フレームを受信するとともに、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号または時刻情報と第2のGPS受信機から取得した航法メッセージ情報とから、測位端末装置が位相制御量の取得に利用したワードおよび該ワードの先頭ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と測位端末装置から受信した位相制御量とを用いて測位演算を行う。
【0020】
第5の発明のGPS測位方法は、第1のGPS受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、無線基地局装置が、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に測位端末装置および測位サーバ装置に送信し、測位端末装置が、無線基地局装置から同報フレームを受信するとともに、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現するビットの先頭C/Aコードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ビットの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを無線基地局を介して測位サーバ装置に送信し、測位サーバ装置が、無線基地局装置から同報フレームを受信するとともに、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号または時刻情報と第2のGPS受信機から取得した航法メッセージ情報とから、測位端末装置が位相制御量の取得に利用したビットおよび該ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と測位端末装置から受信した位相制御量とを用いて測位演算を行う。
【0021】
第6の発明のGPS測位方法は、第1のGPS受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、無線基地局装置が、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に測位端末装置および測位サーバ装置に送信し、測位端末装置が、無線基地局装置から同報フレームを受信するとともに、第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、同報フレームが切り替った後の航法メッセージにおいて最初に出現する先頭C/Aコードに関する1ms(ミリ秒)未満の位相制御量を該台数分取得し、該位相制御量と該C/Aコードと同じタイミングの同報フレームのフレーム番号または時刻情報とを無線基地局を介して測位サーバ装置に送信し、測位サーバ装置が、無線基地局装置から同報フレームを受信するとともに、測位端末装置から無線基地局装置を介して受信した同報フレームのフレーム番号または時刻情報と第2のGPS受信機から取得した航法メッセージ情報とから、測位端末装置が位相制御量の取得に利用したC/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と測位端末装置から受信した位相制御量とを用いて測位演算を行う。
【発明の効果】
【0022】
本発明は、位相制御量の取得に用いたC/Aコードの特定に無線基地局装置から単位時間毎に送信される同報フレームを用いる。測位端末装置は、同報フレームの切り替りタイミング後の最初の1ワード目または最初の1ビット目の先頭C/Aコードに着目してmsオーダの位相制御量を取得し、ワードの先頭またはビットの先頭と同じタイミングの同報フレームのフレーム番号を位相制御量とあわせて測位サーバ装置に送信する。測位サーバ装置は、同報フレームを常時受信しており、測位端末装置から取得したフレーム番号をもとに、航法メッセージにおける測位データ取得に用いたC/Aコードの位置を特定する。特定したC/Aコードから送信時刻を逆算し衛星位置を算出し、測位サーバ装置の位置座標をもとに測位端末装置から送信された位相制御量の補正を行い、補正した位相制御量をもとに測位演算を行う。
【0023】
これにより、測位端末装置で航法メッセージを受信する時間を短縮し、かつ測位端末装置から測位サーバ装置に送信するC/Aコードを特定するための情報を短縮しながら、精度のよい測定処理を行うことができる。
【図面の簡単な説明】
【0024】
【図1】本発明のGPS測位システムの構成例を示す図である。
【図2】本発明のGPS測位システムの測位シーケンス例を示す図である。
【図3】測位端末10のGPS受信機11の動作例を示すタイミングチャートである。
【図4】ワード同期の場合の同報フレームと計測対象のC/Aコードの関係を示す図である。
【図5】測位端末10と測位サーバ20におけるワード特定を説明する図である。
【図6】ビット同期の場合の同報フレームと計測対象のC/Aコードの関係を示す図である。
【図7】測位端末10と測位サーバ20におけるビット特定を説明する図である。
【図8】オフセットありの場合のビット特定を説明する図である。
【図9】同報フレームと計測対象のC/Aコードの関係を示す図である。
【図10】測位端末10と測位サーバ20におけるC/Aコード特定を説明する図である。
【図11】従来のネットワークアシスト型のGPS測位システムの構成例を示す図である。
【発明を実施するための形態】
【実施例1】
【0025】
図1は、本発明のGPS測位システムの構成例を示す。
図1において、本発明のGPS測位システムは、測位端末10、測位サーバ20、無線基地局30から構成される。測位端末10は、GPS受信機11、無線受信部12、同報フレーム13、位相制御量計測部14、無線送信部15を備える。測位サーバ20は、GPS受信機21、無線受信部22、同報フレーム抽出部23、メイン処理部24、有線IF処理部25を備える。
【0026】
測位端末10は、無線受信部12および無線送信部15を介して無線基地局30と通信を行うことができる。測位サーバ20は、無線受信部22および有線IF処理部25を介して無線基地局30と通信を行うことができる。無線基地局30は、同報フレームを単位時間毎に送信しており、測位端末10は無線受信部12を介して同報フレーム抽出部13で同報フレームを受信し、測位サーバ20は無線受信部22を介して同報フレーム抽出部23で同報フレームを受信する。なお、本実施例では同報フレームは無線基地局30から無線通信により測位端末10および測位サーバ20に一斉に同報されることとしているが、測位サーバ20に対しては伝送遅延の小さい光ファイバを用いて同報フレームを同報する構成であってもよい。
【0027】
図2は、本発明のGPS測位システムの測位シーケンス例を示す。
測位サーバ20のGPS受信機21は、航法メッセージを常時受信している。測位端末10は、測位サーバ20から無線基地局30を介して受信する測位要求トリガによりGPS受信機11の受信動作を開始する。このとき、受信可能な衛星候補の情報(衛星番号)を測位サーバ20から受け取ってもよい。測位サーバ20はアルマナックデータから衛星の概位置を算出し、そのエリア内で良好な条件で受信可能な衛星を特定し、指定された台数(N1台)分の衛星情報を予備情報として測位端末10に送信してもよい。ここで、一般に4台の衛星が受信できれば測位演算が可能であるが、一時的に衛星が物陰に隠れて受信不可となる場合も考えられるため、N1は安全をみて測位可能な最低受信台数の4台より大きい台数が選ばれる。
【0028】
実施例1では、GPS受信機11がワード同期機能を備えている場合を想定する。一般に、GPS受信機は電源ONからワード同期を維持した航法メッセージの安定受信動作までにはしばらく時間(数10ms以上)を要する。1ワード(30ビット)の長さは 600msであり、衛星間の航法メッセージの到達時間差は高々20ms程度であるため、ワード同期が取れている受信状態では衛星間で送信時刻が同じワードを特定することができるため、すべての衛星について同一時刻に送信されたワードに関する先頭ビットの先頭C/Aコードを捕らえることができる。
【0029】
測位端末10の位相制御量計測部14は、測位サーバ20より報知された候補衛星について受信を開始し、ワードの先頭ビットの先頭C/Aコードに着目して1ワードの区切り時間である 600ms刻みで位相制御量を取得する。
【0030】
図3は、位相制御量取得時のGPS受信機11の動作状態を示す。
図4は、ワード同期の場合の同報フレームと計測対象C/Aコードの関係を示す。
ここでは、同報フレームの切り替りタイミング後最初のワードの先頭ビットの先頭C/Aコードで位相制御量を取得する様子を示す。このとき、同報フレームの切り替り後最初受信できたすべての衛星に関する同一時刻に送信されたワードに着目して位相制御量を取得する。このとき、測位端末10の内部時計として同報フレームに同期した時計を用いてもよい。衛星間の位相制御量の時間差が20ms以内かどうかで同一時刻に送信されたワードであるか否かを判定できる。
【0031】
GPS受信機11の安定受信後、最初の同報フレームの切り替りのタイミングの直後の航法メッセージのワードの先頭ビットの先頭C/Aコードの位相制御量をN2台分取得する。N2台分の衛星の位相制御量が計測できた段階でGPS受信機11は受信動作を停止し、待機モードに入る。一般に衛星台数が多いほど測位精度は向上するため、N2は、GPS受信機11の動作時間や測位データ量などの測位コストと測位精度のトレードオフ関係を考慮して4≦N2≦N1から決めることになる。
【0032】
測位端末10の位相制御量計測部14は、位相制御量を取得した時点の同報フレームのフレーム番号(図4の例ではフレーム番号m)と、N2台分の衛星の位相制御量を無線送信部15から無線基地局30を介して測位サーバ20に送信する。
【0033】
測位サーバ20に備わるGPS受信機21もワード同期機能を備えているとする。測位サーバ20のメイン処理部24は、同報フレーム抽出部23で受信した同報フレームの切り替りタイミングを識別し、m番目のフレーム番号の同報フレームに切り替った時刻以降で最初のワードの先頭ビットの先頭C/Aコードを識別する。C/Aコードが特定できれば、サブフレーム先頭に含まれるHOW値からそのサブフレームの送信時刻がわかるため、サブフレーム先頭からのオフセットを計算することにより、該ワードの先頭C/Aコードの送信時刻を特定することができる。
【0034】
GPS受信機21は、衛星間でもワード同期を維持しているとし、着目するワードはすべての衛星が同一時刻に送信されたものとする。
【0035】
メイン処理部24は、サブフレーム先頭から数えて何番目のC/AコードかをカウントすることによりC/Aコードが送信された時刻を特定できる。この時刻からC/Aコードを送信した時の衛星の位置をエフェメリスデータから計算できる。
【0036】
N2台の衛星位置(xi ,yi ,zi )を特定できれば、測位端末10の位置座標(x,y,z)と時計誤差Δtを未知数として
(x−x1)2 +(y−y1)2 +(z−z1)2 =c2(Δ1 −Δt)2
…
(x−xN2)2+(y−yN2)2+(z−zN2)2=c2(ΔN2−Δt)2
が成り立つ。なお、Δi は測位端末10で取得したi番目の衛星の位相制御量である。
【0037】
ここで、同報フレームのジッタや測位端末10に到着する航法メッセージと、測位サーバ20に到着する航法メッセージとの間の時間差が原因となって、m番目の同報フレームの切り替りタイミングから判定されるC/Aコードと位相制御量を取得したC/Aコードとを1ワード分ずれた位置で識別してしまう可能性がある。すなわち、1ワード前後のワードを識別してしまう可能性がある。
【0038】
この様子を図5に示す。この例では、測位端末10と測位サーバ20の同報フレームの到達時刻差により、測位端末10では衛星3について#1のワードを識別しているが、測位サーバ20では#2のワードを識別している。測位サーバ20が1ワード分ずれて識別した場合、正しく識別した場合から 600msの時間差が生じる。衛星は約 3.4km/s程度の速度で地球上を周回しているため、この間に約2km程度移動することになる。本来の衛星位置から約2km程度ずれた位置情報をもとに測位演算を行う、測位演算の結果得られた端末位置10は、無線エリアの半径を 1.5km程度とすると無線エリアから外れたり想定外の高度が得られたりすることが考えられる。このように誤って識別したワードから測位演算した結果は不適切な解として除外することができる。
【0039】
ワードの誤識別を回避する別の方法を以下に説明する。この場合、測位端末10が同報フレームの切り替りタイミングから前後に最も大きいマージンを持つ衛星の航法メッセージを基準にすることによって残りのワードの誤識別を回避できる。図5の例では、これを衛星4とする。衛星4の位相制御量Δ4 を基準とする。測位サーバ20は十分な判定マージンを有する衛星4のワードについては正しく識別することができるとする。残りの衛星1,2,3のワードの特定は、Δ1 −Δ4 、Δ2 −Δ4 、Δ3 −Δ4 を手掛かりに判定することができる。
【0040】
いま、測位サーバ20で取得したi番目の衛星の位相制御量をΔ'iと表記する。例えば図5において、測位サーバ20が衛星3のワード#2を識別した場合、測位サーバ20から見た位相制御量Δ'3−Δ'4の値がΔ3 −Δ4 と比較して大幅に異なる場合は、誤ってワード#2を識別していると判断できる。このようにしてワード#1を候補として絞り込むことができる。
【0041】
ここで、測位端末10において、たまたま全衛星のワードの先頭が同報フレームの切り替りとほぼ同じタイミングだった場合の対処について説明する。この場合は、同報フレームから例えば 600msの半分の 300msのオフセット後の時刻を新たな判定タイミングとして、このタイミング以降最初のワードを識別することによって、測位サーバ側で識別するワードずれを回避できる。オフセットの有無はフレーム番号および位相制御量の情報と一緒に測位サーバ20に送信する。
【0042】
GPS受信機11がワード同期機能を持つ場合は、 600ms単位で航法メッセージのワードを特定できればよいため、無線基地局30が送信する同報フレームがジッタなどの影響で測位端末10と測位サーバ20に到達する時刻に比較的大きな差が生じる場合でも対応できる。
【実施例2】
【0043】
実施例2では、GPS受信機11がワード同期機能を備えずビット同期機能のみを備える場合を扱う。ワード同期には長い時間の受信動作が必要であるが、ビット同期のみであればより短時間で安定受信動作が可能である。ただし、ビット区切りは20ms単位であり、衛星位置による航法メッセージの到着時間差も20ms程度あるため、衛星間でビット同期を取ることはできない。ビット同期の場合の同報フレームと計測対象C/Aコードの関係を図6に示す。
【0044】
測位端末10は、同報フレームの切り替りタイミング以降の最初のビットの先頭C/Aコードについて、ビットの時間単位である20ms毎に位相制御量を取得する。位相制御量の値は0ms以上20ms未満となる。
【0045】
図7に示すように、フレームの切り替りタイミングのずれの影響で測位サーバ20が測位端末10とは異なるビットを識別してしまう場合がある。この場合、測位端末10が同報フレームの切り替りタイミングから前後に最も大きいマージンを持つ衛星の航法メッセージを基準にすることによって残りのビットの誤識別を回避できる。図7の例ではこれを衛星2とする。衛星2の位相制御量Δ2 を基準とする。測位サーバ20は十分な判定マージンを有する衛星2のビットについては正しく識別することができるとする。残りの衛星1,3,4のビットの特定は、Δ1 −Δ2 、Δ3 −Δ2 、Δ4 −Δ2 を手掛かりに判定することができる。例えば、図7において、測位サーバ20が衛星3のビット#1を識別した場合、測位サーバ20から見た位相制御量Δ'3−Δ'2の値がΔ3 −Δ2 と比較して大幅に異なる場合は、誤ってビットを識別していると判断できる。すなわち、ビット#2を候補として絞り込むことができる。
【0046】
ビットが特定できれば、サブフレーム先頭に含まれるHOW値からそのサブフレームの送信時刻がわかるため、サブフレーム先頭からのオフセットを計算することにより、該ビットの先頭C/Aコードの送信時刻を特定することができる。
【0047】
ここで、測位端末10において、図8(1) に示すように、たまたま全衛星のビットの先頭が同報フレームの切り替りとほぼ同じタイミングだった場合の対処について説明する。図8(2) に示すように、この場合は、同報フレームから例えば20msの半分の10msのオフセット後の時刻を新たな判定タイミングとして、このタイミング以降最初のビットを識別することによって、測位サーバ20側で識別するビットずれを回避できる。オフセットの有無はフレーム番号および位相制御量の情報と一緒に測位サーバ10に送信する。
【0048】
なお、測位端末10と測位サーバ20間、すなわちGPS受信機11とGPS受信機21の距離が数百km離れていたとしても、航法メッセージの到着時間差に換算すると1 〜2 ms程度と考えられるため、上に述べた方法でビットの誤識別を回避できる。
【0049】
また、図7の例では衛星3のみ他の衛星より1ビット遅れた航法メッセージから位相制御量を取得しているが、20ms間の間に測位端末が移動する距離はほとんど無視できる程度(時速 100km/hで移動していても約50cm)なので、よい近似で
(x−x1)2 +(y−y1)2 +(z−z1)2 =c2(Δ1 −Δt)2
…
(x−xN2)2+(y−yN2)2+(z−zN2)2=c2(ΔN2−Δt)2
が成り立つとしてよい。
【0050】
本実施例においては、ジッタ等の影響による測位端末10、測位サーバ20間の同報フレームの到着時間差は、実施例1に比較すると厳しい条件となる。
【実施例3】
【0051】
実施例3では、GPS受信機11がワード同期機能およびビット同期機能を備えておらず、1ms単位のC/Aコードに関する位相制御量を取得する機能のみを備えている場合に相当する。GPS受信機11は機能的に最も簡単な構造となる。したがって、ワード同期やビット同期に基づいた測位方法に比べると、GPS受信機11の安定受信動作に要する時間はより短時間で済む。同報フレームと計測対象C/Aコードの関係を図9に示す。
【0052】
測位端末10は同報フレームの切り替りタイミング直後のC/Aコードについて、C/Aコードの刻み幅である1msを基準に取得した1ms未満の量(Δi とする)を取得する。ms未満の量のみを測位サーバに送信すればよいため、無線ネットワークの帯域を節約できる。
【0053】
図10に示すように、フレームの切り替りタイミングのずれの影響で測位サーバ20が測位端末10とは異なるC/Aコードを識別してしまう場合がある。この場合、測位端末10が同報フレームの切り替りタイミングから前後に最も大きいマージンを持つ衛星の航法メッセージを基準にすることによって、残りのC/Aコードの誤識別を回避できる。図10の例ではこれを衛星2とし、測位サーバ20は十分な判定マージンを有する衛星2のC/Aコードについては正しく識別することができるとする。このときの衛星2の位相制御量Δ2 を基準とすると、残りの衛星1,3,4のC/Aコードの特定は、Δ1 −Δ2 、Δ3 −Δ2 、Δ4 −Δ2 を手掛かりに判定することができる。
【0054】
例えば図10において、測位サーバ20が衛星3のC/Aコードを#1として識別した場合、測位サーバ20から見た位相制御量Δ'3−Δ'2の値がΔ3 −Δ2 と比較して大幅に異なる場合は、誤ってC/Aコードを識別していると判断できる。すなわち、C/Aコード#2を候補として絞り込むことができる。C/Aコードが特定できれば、サブフレーム先頭に含まれるHOW値からそのサブフレームの送信時刻がわかるため、サブフレーム先頭からのオフセットを計算することにより、該C/Aコードの送信時刻を特定することができる。
【0055】
この処理を行うためには、測位端末10と測位サーバ20間の距離は航法メッセージの到達時間差にして1msよりも十分小さいことが必要となる。これは距離に換算すると、数十km程度となる(時間差 100μsを許容する場合、約30km)。したがって、実施例1,2に比べると、より密な間隔で測位サーバ20もしくはGPS受信機21を設置する必要がある。
【0056】
ここで、測位端末10において、たまたま全衛星のC/Aコードが同報フレームの切り替りとほぼ同じタイミングだった場合の対処について説明する。この場合は、同報フレームから例えば1msの半分の 500μsのオフセット後の時刻を新たな判定タイミングとして、このタイミング以降最初のC/Aコードを識別することによって、測位サーバ20側で識別するC/Aコードずれを回避できる。オフセットの有無はフレーム番号および位相制御量の情報と一緒に測位サーバ20に送信する。
【0057】
また、測位サーバ20は測位演算を行うために、1ms未満の位相制御量Δi からmsのオーダの量を含む位相制御量に復元する必要がある。上に述べた方法により各衛星の航法メッセージのC/Aコード位置を特定できたなら、そのC/Aコードを送信したGPS時刻を特定し、このときの衛星位置をエフェメリスデータから計算する。
【0058】
ここで、測位端末10は特定の無線基地局30に属するカバーエリア内に位置するとし、ひとつのカバーエリアの広さは高々数kmもしくは数十km程度であるとする。無線基地局30のカバーエリア内の中心付近に位置が既知のリファレンス地点があるとすると、上記C/Aコード送信時の衛星iの位置とリファレンス地点間の距離は計算可能であるので、この距離を光速で割った値δi を求める。上記C/Aコード送信時の衛星iの位置と測位端末間の擬似距離をc×di (cは光速) とすると、測位端末10とリファレンス地点間の距離は光速換算の1msに相当する 300km以下であるため、δi とdi の差は1ms未満のはずである。なお、di は、測位端末10で取得した衛星iのms未満の位相制御量Δi を測位サーバ20がmsのオーダまで考慮して変換した補正後の位相制御量である。
【0059】
いま、測位端末10が取得した1ms未満の位相制御量をΔ1<Δ2<Δ3<Δ4とする。またδi について、1ms未満を切り捨てた量をu(δi)、1ms未満の量をv(δi)とする。すなわち、δi =u(δi)+v(δi)である。ここで、測位演算に用いる擬似距離については共通の量を加減しても測位結果には影響がないため、δiから共通の量v(δi)を引いた値をδ'iとする。
δ'1=δ1 −v(δ1)=u(δ1)
δ'2=δ2 −v(δ1) δ'3=δ3 −v(δ1) δ'4=δ4 −v(δ1)
【0060】
d1 =δ'1とすれば、d2 はms以上の量はv (δ'2) をそのまま用い、1ms未満の量v (δ'2) のみ補正が必要であるためΔ2 −Δ1 で置き換えればよい。すなわち、
d2 =δ'2−v(δ'2)+(Δ2 −Δ1 )
とすればよい。d3 ,d4 についても同様に
d3 =δ'3−v(δ'3)+(Δ3 −Δ1 )
d4 =δ'4−v(δ'4)+(Δ4 −Δ1 )
とすればよい。
【0061】
以降の処理は、実施例1と同様に測位端末10の位置座標(x,y,z)と、測位端末10の時計誤差Δtを未知数として方程式N2台の衛星位置(xi ,yi ,zi )を特定できれば、測位端末10の位置座標(x,y,z)と時計誤差Δtを未知数として
(x−x1)2 +(y−y1)2 +(z−z1)2 =c2(d1 −Δt)2
…
(x−xN2)2+(y−yN2)2+(z−zN2)2=c2(dN2−Δt)2
を立てて、これらについて解を求めればよい。
【0062】
実施例1,2と比較すると、同報フレームのジッタに伴う到達時間差の許容値はより小さくなるが、GPS受信機11がワード同期するまで待つ必要がないため、実装機能が少なくてすむ、電源ON時間が短くてすむ等のメリットがある。
【符号の説明】
【0063】
10 測位端末
11 GPS受信機
12 無線受信部
13 同報フレーム
14 位相制御量計測部
15 無線送信部
20 測位サーバ
21 GPS受信機
22 無線受信部
23 同報フレーム抽出部
24 メイン処理部
25 有線IF処理部
30 無線基地局
【特許請求の範囲】
【請求項1】
第1のGPS(Global Positioning System )受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、
前記無線基地局装置は、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に前記測位端末装置および前記測位サーバ装置に送信する手段を備え、
前記測位端末装置は、前記無線基地局装置から前記同報フレームを受信するとともに、前記第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、前記同報フレームが切り替った後の航法メッセージにおいて最初に出現するワードの先頭ビットの先頭C/A(Coarse/Acquisition )コードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ワードの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを前記無線基地局を介して前記測位サーバ装置に送信する手段を備え、
前記測位サーバ装置は、前記無線基地局装置から前記同報フレームを受信するとともに、前記測位端末装置から前記無線基地局装置を介して受信した前記同報フレームのフレーム番号または時刻情報と前記第2のGPS受信機から取得した航法メッセージ情報とから、前記測位端末装置が前記位相制御量の取得に利用した前記ワードおよび該ワードの先頭ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と前記測位端末装置から受信した前記位相制御量とを用いて測位演算を行う手段を備えた
ことを特徴とするGPS測位システム。
【請求項2】
第1のGPS(Global Positioning System )受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、
前記無線基地局装置は、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に前記測位端末装置および前記測位サーバ装置に送信する手段を備え、
前記測位端末装置は、前記無線基地局装置から前記同報フレームを受信するとともに、前記第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、前記同報フレームが切り替った後の航法メッセージにおいて最初に出現するビットの先頭C/A(Coarse/Acquisition )コードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ビットの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを前記無線基地局を介して前記測位サーバ装置に送信する手段を備え、
前記測位サーバ装置は、前記無線基地局装置から前記同報フレームを受信するとともに、前記測位端末装置から前記無線基地局装置を介して受信した前記同報フレームのフレーム番号または時刻情報と前記第2のGPS受信機から取得した航法メッセージ情報とから、前記測位端末装置が前記位相制御量の取得に利用した前記ビットおよび該ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と前記測位端末装置から受信した前記位相制御量とを用いて測位演算を行う手段を備えた
ことを特徴とするGPS測位システム。
【請求項3】
第1のGPS(Global Positioning System )受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、
前記無線基地局装置は、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に前記測位端末装置および前記測位サーバ装置に送信する手段を備え、
前記測位端末装置は、前記無線基地局装置から前記同報フレームを受信するとともに、前記第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、前記同報フレームが切り替った後の航法メッセージにおいて最初に出現する先頭C/A(Coarse/Acquisition )コードに関する1ms(ミリ秒)未満の位相制御量を該台数分取得し、該位相制御量と該C/Aコードと同じタイミングの同報フレームのフレーム番号または時刻情報とを前記無線基地局を介して前記測位サーバ装置に送信する手段を備え、
前記測位サーバ装置は、前記無線基地局装置から前記同報フレームを受信するとともに、前記測位端末装置から前記無線基地局装置を介して受信した前記同報フレームのフレーム番号または時刻情報と前記第2のGPS受信機から取得した航法メッセージ情報とから、前記測位端末装置が位相制御量の取得に利用した前記C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と前記測位端末装置から受信した前記位相制御量とを用いて測位演算を行う手段を備えた
ことを特徴とするGPS測位システム。
【請求項4】
請求項3に記載のGPS測位システムにおいて、
前記測位サーバは、位置が既知である前記無線基地局装置の無線エリアに属する参照点の位置情報と前記C/Aコード送信時の衛星位置との間の距離を光速で割った概略到達時間を算出し、該概略到達時間から衛星と前記測位端末装置間の到達時間の1ms以上の量を特定し、1ms未満の量は前記測位端末装置が取得した前記位相制御量の情報により補正することにより衛星と前記測位端末装置間の正確な到達所要時間を算出し、該到達所用時間を利用して前記測位端末装置の測位演算を行う手段を含む
ことを特徴とするGPS測位システム。
【請求項5】
請求項1に記載のGPS測位システムにおいて、
前記測位端末装置は、検知した同報フレームの切り替りタイミングと受信した全衛星の航法メッセージのワードの切り替りタイミングとの間に所定の時間差がない場合は、同報フレームの切り替りタイミングに対して 300ms相当のオフセット量を遅延させたタイミングを新たな判定タイミングとし、オフセットの有無の情報を前記位相制御量と前記同報フレームのフレーム番号または時刻情報とともに前記測位サーバ装置に送信する手段を含む
ことを特徴とするGPS測位システム。
【請求項6】
請求項2に記載のGPS測位システムにおいて、
前記測位端末装置は、検知した同報フレームの切り替りタイミングと受信した全衛星の航法メッセージのビットの切り替りタイミングとの間に所定の時間差がない場合は、同報フレームの切り替りタイミングに対して10ms相当のオフセット量を遅延させたタイミングを新たな判定タイミングとし、オフセットの有無の情報を前記位相制御量と前記同報フレームのフレーム番号または時刻情報とともに前記測位サーバ装置に送信する手段を含む
ことを特徴とするGPS測位システム。
【請求項7】
請求項3に記載のGPS測位システムにおいて、
前記測位端末装置は、検知した同報フレームの切り替りタイミングと受信した全衛星の航法メッセージのC/Aコードの切り替りタイミングとの間に所定の時間差がない場合は、同報フレームの切り替りタイミングに対して 500μs相当のオフセット量を遅延させたタイミングを新たな判定タイミングとし、オフセットの有無の情報を前記位相制御量と前記同報フレームのフレーム番号または時刻情報とともに前記測位サーバ装置に送信する手段を含む
ことを特徴とするGPS測位システム。
【請求項8】
請求項1,2,3のいずれかに記載のGPS測位システムにおいて、
前記測位サーバ装置は、GPS受信状態を観測して前記測位端末装置が受信可能なGPS衛星をあらかじめ決めた台数選定し、この選定した台数分のGPS衛星の情報を前記無線基地局装置を介して前記測位端末装置に送信する手段を含み、
前記測位端末装置は、前記選定した台数分のGPS衛星の情報を受信して前記第1のGPS受信機を起動し、前記選定した台数分のGPS衛星の航法メッセージの受信動作を開始し、前記該台数分の位相制御量の取得を完了したことをもって前記第1のGPS受信機の動作を停止する手段を含む
ことを特徴とするGPS測位システム。
【請求項9】
第1のGPS(Global Positioning System )受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、
前記無線基地局装置が、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に前記測位端末装置および前記測位サーバ装置に送信し、
前記測位端末装置が、前記無線基地局装置から前記同報フレームを受信するとともに、前記第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、前記同報フレームが切り替った後の航法メッセージにおいて最初に出現するワードの先頭ビットの先頭C/A(Coarse/Acquisition )コードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ワードの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを前記無線基地局を介して前記測位サーバ装置に送信し、
前記測位サーバ装置が、前記無線基地局装置から前記同報フレームを受信するとともに、前記測位端末装置から前記無線基地局装置を介して受信した前記同報フレームのフレーム番号または時刻情報と前記第2のGPS受信機から取得した航法メッセージ情報とから、前記測位端末装置が前記位相制御量の取得に利用した前記ワードおよび該ワードの先頭ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と前記測位端末装置から受信した前記位相制御量とを用いて測位演算を行う
ことを特徴とするGPS測位方法。
【請求項10】
第1のGPS(Global Positioning System )受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、
前記無線基地局装置が、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に前記測位端末装置および前記測位サーバ装置に送信し、
前記測位端末装置が、前記無線基地局装置から前記同報フレームを受信するとともに、前記第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、前記同報フレームが切り替った後の航法メッセージにおいて最初に出現するビットの先頭C/A(Coarse/Acquisition )コードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ビットの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを前記無線基地局を介して前記測位サーバ装置に送信し、
前記測位サーバ装置が、前記無線基地局装置から前記同報フレームを受信するとともに、前記測位端末装置から前記無線基地局装置を介して受信した前記同報フレームのフレーム番号または時刻情報と前記第2のGPS受信機から取得した航法メッセージ情報とから、前記測位端末装置が前記位相制御量の取得に利用した前記ビットおよび該ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と前記測位端末装置から受信した前記位相制御量とを用いて測位演算を行う
ことを特徴とするGPS測位方法。
【請求項11】
第1のGPS(Global Positioning System )受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、
前記無線基地局装置が、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に前記測位端末装置および前記測位サーバ装置に送信し、
前記測位端末装置が、前記無線基地局装置から前記同報フレームを受信するとともに、前記第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、前記同報フレームが切り替った後の航法メッセージにおいて最初に出現する先頭C/A(Coarse/Acquisition )コードに関する1ms(ミリ秒)未満の位相制御量を該台数分取得し、該位相制御量と該C/Aコードと同じタイミングの同報フレームのフレーム番号または時刻情報とを前記無線基地局を介して前記測位サーバ装置に送信し、
前記測位サーバ装置が、前記無線基地局装置から前記同報フレームを受信するとともに、前記測位端末装置から前記無線基地局装置を介して受信した前記同報フレームのフレーム番号または時刻情報と前記第2のGPS受信機から取得した航法メッセージ情報とから、前記測位端末装置が位相制御量の取得に利用した前記C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と前記測位端末装置から受信した前記位相制御量とを用いて測位演算を行う
ことを特徴とするGPS測位方法。
【請求項1】
第1のGPS(Global Positioning System )受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、
前記無線基地局装置は、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に前記測位端末装置および前記測位サーバ装置に送信する手段を備え、
前記測位端末装置は、前記無線基地局装置から前記同報フレームを受信するとともに、前記第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、前記同報フレームが切り替った後の航法メッセージにおいて最初に出現するワードの先頭ビットの先頭C/A(Coarse/Acquisition )コードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ワードの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを前記無線基地局を介して前記測位サーバ装置に送信する手段を備え、
前記測位サーバ装置は、前記無線基地局装置から前記同報フレームを受信するとともに、前記測位端末装置から前記無線基地局装置を介して受信した前記同報フレームのフレーム番号または時刻情報と前記第2のGPS受信機から取得した航法メッセージ情報とから、前記測位端末装置が前記位相制御量の取得に利用した前記ワードおよび該ワードの先頭ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と前記測位端末装置から受信した前記位相制御量とを用いて測位演算を行う手段を備えた
ことを特徴とするGPS測位システム。
【請求項2】
第1のGPS(Global Positioning System )受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、
前記無線基地局装置は、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に前記測位端末装置および前記測位サーバ装置に送信する手段を備え、
前記測位端末装置は、前記無線基地局装置から前記同報フレームを受信するとともに、前記第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、前記同報フレームが切り替った後の航法メッセージにおいて最初に出現するビットの先頭C/A(Coarse/Acquisition )コードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ビットの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを前記無線基地局を介して前記測位サーバ装置に送信する手段を備え、
前記測位サーバ装置は、前記無線基地局装置から前記同報フレームを受信するとともに、前記測位端末装置から前記無線基地局装置を介して受信した前記同報フレームのフレーム番号または時刻情報と前記第2のGPS受信機から取得した航法メッセージ情報とから、前記測位端末装置が前記位相制御量の取得に利用した前記ビットおよび該ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と前記測位端末装置から受信した前記位相制御量とを用いて測位演算を行う手段を備えた
ことを特徴とするGPS測位システム。
【請求項3】
第1のGPS(Global Positioning System )受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、
前記無線基地局装置は、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に前記測位端末装置および前記測位サーバ装置に送信する手段を備え、
前記測位端末装置は、前記無線基地局装置から前記同報フレームを受信するとともに、前記第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、前記同報フレームが切り替った後の航法メッセージにおいて最初に出現する先頭C/A(Coarse/Acquisition )コードに関する1ms(ミリ秒)未満の位相制御量を該台数分取得し、該位相制御量と該C/Aコードと同じタイミングの同報フレームのフレーム番号または時刻情報とを前記無線基地局を介して前記測位サーバ装置に送信する手段を備え、
前記測位サーバ装置は、前記無線基地局装置から前記同報フレームを受信するとともに、前記測位端末装置から前記無線基地局装置を介して受信した前記同報フレームのフレーム番号または時刻情報と前記第2のGPS受信機から取得した航法メッセージ情報とから、前記測位端末装置が位相制御量の取得に利用した前記C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と前記測位端末装置から受信した前記位相制御量とを用いて測位演算を行う手段を備えた
ことを特徴とするGPS測位システム。
【請求項4】
請求項3に記載のGPS測位システムにおいて、
前記測位サーバは、位置が既知である前記無線基地局装置の無線エリアに属する参照点の位置情報と前記C/Aコード送信時の衛星位置との間の距離を光速で割った概略到達時間を算出し、該概略到達時間から衛星と前記測位端末装置間の到達時間の1ms以上の量を特定し、1ms未満の量は前記測位端末装置が取得した前記位相制御量の情報により補正することにより衛星と前記測位端末装置間の正確な到達所要時間を算出し、該到達所用時間を利用して前記測位端末装置の測位演算を行う手段を含む
ことを特徴とするGPS測位システム。
【請求項5】
請求項1に記載のGPS測位システムにおいて、
前記測位端末装置は、検知した同報フレームの切り替りタイミングと受信した全衛星の航法メッセージのワードの切り替りタイミングとの間に所定の時間差がない場合は、同報フレームの切り替りタイミングに対して 300ms相当のオフセット量を遅延させたタイミングを新たな判定タイミングとし、オフセットの有無の情報を前記位相制御量と前記同報フレームのフレーム番号または時刻情報とともに前記測位サーバ装置に送信する手段を含む
ことを特徴とするGPS測位システム。
【請求項6】
請求項2に記載のGPS測位システムにおいて、
前記測位端末装置は、検知した同報フレームの切り替りタイミングと受信した全衛星の航法メッセージのビットの切り替りタイミングとの間に所定の時間差がない場合は、同報フレームの切り替りタイミングに対して10ms相当のオフセット量を遅延させたタイミングを新たな判定タイミングとし、オフセットの有無の情報を前記位相制御量と前記同報フレームのフレーム番号または時刻情報とともに前記測位サーバ装置に送信する手段を含む
ことを特徴とするGPS測位システム。
【請求項7】
請求項3に記載のGPS測位システムにおいて、
前記測位端末装置は、検知した同報フレームの切り替りタイミングと受信した全衛星の航法メッセージのC/Aコードの切り替りタイミングとの間に所定の時間差がない場合は、同報フレームの切り替りタイミングに対して 500μs相当のオフセット量を遅延させたタイミングを新たな判定タイミングとし、オフセットの有無の情報を前記位相制御量と前記同報フレームのフレーム番号または時刻情報とともに前記測位サーバ装置に送信する手段を含む
ことを特徴とするGPS測位システム。
【請求項8】
請求項1,2,3のいずれかに記載のGPS測位システムにおいて、
前記測位サーバ装置は、GPS受信状態を観測して前記測位端末装置が受信可能なGPS衛星をあらかじめ決めた台数選定し、この選定した台数分のGPS衛星の情報を前記無線基地局装置を介して前記測位端末装置に送信する手段を含み、
前記測位端末装置は、前記選定した台数分のGPS衛星の情報を受信して前記第1のGPS受信機を起動し、前記選定した台数分のGPS衛星の航法メッセージの受信動作を開始し、前記該台数分の位相制御量の取得を完了したことをもって前記第1のGPS受信機の動作を停止する手段を含む
ことを特徴とするGPS測位システム。
【請求項9】
第1のGPS(Global Positioning System )受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、
前記無線基地局装置が、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に前記測位端末装置および前記測位サーバ装置に送信し、
前記測位端末装置が、前記無線基地局装置から前記同報フレームを受信するとともに、前記第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、前記同報フレームが切り替った後の航法メッセージにおいて最初に出現するワードの先頭ビットの先頭C/A(Coarse/Acquisition )コードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ワードの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを前記無線基地局を介して前記測位サーバ装置に送信し、
前記測位サーバ装置が、前記無線基地局装置から前記同報フレームを受信するとともに、前記測位端末装置から前記無線基地局装置を介して受信した前記同報フレームのフレーム番号または時刻情報と前記第2のGPS受信機から取得した航法メッセージ情報とから、前記測位端末装置が前記位相制御量の取得に利用した前記ワードおよび該ワードの先頭ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と前記測位端末装置から受信した前記位相制御量とを用いて測位演算を行う
ことを特徴とするGPS測位方法。
【請求項10】
第1のGPS(Global Positioning System )受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、
前記無線基地局装置が、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に前記測位端末装置および前記測位サーバ装置に送信し、
前記測位端末装置が、前記無線基地局装置から前記同報フレームを受信するとともに、前記第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、前記同報フレームが切り替った後の航法メッセージにおいて最初に出現するビットの先頭C/A(Coarse/Acquisition )コードに関するms(ミリ秒)のオーダの位相制御量を該台数分取得し、該位相制御量と該ビットの先頭と同じタイミングの同報フレームのフレーム番号または時刻情報とを前記無線基地局を介して前記測位サーバ装置に送信し、
前記測位サーバ装置が、前記無線基地局装置から前記同報フレームを受信するとともに、前記測位端末装置から前記無線基地局装置を介して受信した前記同報フレームのフレーム番号または時刻情報と前記第2のGPS受信機から取得した航法メッセージ情報とから、前記測位端末装置が前記位相制御量の取得に利用した前記ビットおよび該ビットの先頭C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と前記測位端末装置から受信した前記位相制御量とを用いて測位演算を行う
ことを特徴とするGPS測位方法。
【請求項11】
第1のGPS(Global Positioning System )受信機を備える測位端末装置と、無線基地局装置と、第2のGPS受信機を備える測位サーバ装置とを備え、
前記無線基地局装置が、フレーム番号または時刻情報を付与した同報フレームを単位時間毎に前記測位端末装置および前記測位サーバ装置に送信し、
前記測位端末装置が、前記無線基地局装置から前記同報フレームを受信するとともに、前記第1のGPS受信機により所定台数分の衛星に関する航法メッセージを受信し、前記同報フレームが切り替った後の航法メッセージにおいて最初に出現する先頭C/A(Coarse/Acquisition )コードに関する1ms(ミリ秒)未満の位相制御量を該台数分取得し、該位相制御量と該C/Aコードと同じタイミングの同報フレームのフレーム番号または時刻情報とを前記無線基地局を介して前記測位サーバ装置に送信し、
前記測位サーバ装置が、前記無線基地局装置から前記同報フレームを受信するとともに、前記測位端末装置から前記無線基地局装置を介して受信した前記同報フレームのフレーム番号または時刻情報と前記第2のGPS受信機から取得した航法メッセージ情報とから、前記測位端末装置が位相制御量の取得に利用した前記C/Aコードを特定し、特定したC/Aコードの送信時刻と該時刻における衛星位置とを求め、該衛星位置と前記測位端末装置から受信した前記位相制御量とを用いて測位演算を行う
ことを特徴とするGPS測位方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−247237(P2012−247237A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−117746(P2011−117746)
【出願日】平成23年5月26日(2011.5.26)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月26日(2011.5.26)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
[ Back to top ]