
GPS電波遮断物体検出システム
【課題】他の移動経路(14a,14a)の隣接している移動経路(14,14)にGPSアンテナ11が設置されても、高い精度・確度でGPS電波遮断物体(15)を検出する。
【解決手段】GPSアンテナ11と、そのGPS信号を処理して測位結果を出力するGPS受信機12と、その出力Sに基づく電波受信の成否に応じてGPS電波遮断物体の存否を判断する判定装置14と、GPS電波遮断物体の検出に使用するGPS衛星(16)をその方位・仰角・受信レベルと選別用データの方位・仰角・強度閾値との比較に応じて選別する選別手段13cと、その選別結果を一定期間に亘って保持するバッファ手段13dと、移動経路(14,14)に係る進行方向に基づいて選別用データのうち方位の部分を自動設定する方位設定手段13bとを備える。
【解決手段】GPSアンテナ11と、そのGPS信号を処理して測位結果を出力するGPS受信機12と、その出力Sに基づく電波受信の成否に応じてGPS電波遮断物体の存否を判断する判定装置14と、GPS電波遮断物体の検出に使用するGPS衛星(16)をその方位・仰角・受信レベルと選別用データの方位・仰角・強度閾値との比較に応じて選別する選別手段13cと、その選別結果を一定期間に亘って保持するバッファ手段13dと、移動経路(14,14)に係る進行方向に基づいて選別用データのうち方位の部分を自動設定する方位設定手段13bとを備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、鉄道用車両や自動車などの金属物体その他のGPS電波遮断物体を検出対象物としてその存否を検出するGPS電波遮断物体検出システムに関し、詳しくは、衛星航法システム(Global Positioning System)用のGPS(Global Positioning Satellite)衛星から送られてくるGPS電波を利用してGPS電波遮断物体の検出を行うGPS電波遮断物体検出システムに関する。
【背景技術】
【0002】
鉄道用車両を含めた金属物体などを検出する方式として、鉄道用車両では車両の車軸にて左右のレールを短絡することによりその存在を検出する軌道回路方式が広く採用されている(例えば特許文献1参照)。その他、金属物体が存在することにより発信周波数が変化することを利用したループコイル方式(例えば特許文献2参照)、発光器から受光器に送られた光が遮光性物体により遮断されることにより物体の存在を検出するフォトインタラプタ方式などが実用化されている。
また、GPSを利用した検出システムとして、GPSアンテナとGPS受信機を路面電車等の移動体に搭載して運行位置を検出するものや(例えば特許文献3参照)、GPSアンテナ等を地上に固定しておいて地殻変動を測定するものなどが挙げられる。
【0003】
【特許文献1】特開2000−168554号公報
【特許文献2】特開2005−238883号公報
【特許文献3】特開2006−240478号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
[特許文献4] 特願2007−192333号
[特許文献5] 特願2007−202414号
【0005】
このようなGPS利用の検出システムでは、無料で受信できるGPS電波を利用するため、送信機を自前で備える必要がないので、その分だけ原価を削減することができる。
また、複数のGPS衛星からの電波を受信できるうえ、それぞれの電波には時刻情報や位置情報などの複数の情報が含まれているため、使用態様により、物体存知検出の判定要件としてこれらを選択することにより物体検出の精度・確度、応動時間を指定することができる。
しかしながら、従来のGPS利用システムでは、位置は測定するが、物体の有無を検出するようにはなっていなかった。
【0006】
一方、GPSを利用していない従来の物体検出システムでは、電波等を送信しながら、それを受信できるか否かを検出するようになっている。このため、検出対象物による送信信号の遮断の有無に応じて物体の存否を判別することができる。
しかしながら、受信機だけでなく送信機も自前で備えなければならないので、その分だけ原価が嵩むこととなる。また、検出を確実に行うためには、送受信する電波等にID(識別符号)を付加する、あるいは変調を施すなどにより、電波等をユニークにし正規な電波等と雑音とを弁別する手段が必要である。
そこで、鉄道用車両や自動車などの金属物体がGPS電波を遮断するものであることに着目して、GPSを利用することにより金属その他のGPS電波遮断物体を検出するGPS電波遮断物体検出システムを簡便かつ低廉に実現することが望まれることとなる。
【0007】
そして、その要望に応えるべく、鉄道用車両や自動車などの金属物体を検出対象物としてその存否を検出する金属物体検出システムであって、衛星航法システム用のGPS衛星から送られてくるGPS電波を利用して検出対象物が存在するか否かを検出する金属物体検出システムが提案されている(特許文献4参照)。
また、そのような検出システムを鉄道信号に適用する場合、鉄道信号の運転保安設備には鉄道輸送の安全を確保するためにフェールセーフ性が要求されるので、鉄道信号や同等の安全性を要する分野でも使用できるよう、フェールセーフ性を具備させたGPS電波遮断物体検出システムも提案されている(特許文献5参照)。
【0008】
ところで、GPS電波遮断物体検出システムでは、GPSアンテナ設置先に天空を遮る建造物が存在すると、建造物の向こうのGPS衛星は、GPS電波遮断物体の検出に利用できない。また、鉄道用車両や自動車といった移動体については、GPS電波遮断物体検出システムのGPSアンテナが設置されていて検出対象車両の走行する線路や車線と他の線路や車線とが隣接していると、そこを走行する他の車両や自動車が、GPSアンテナの近くを走行する場合がある。そして、検出対象でない車両や自動車が隣接の移動経路を走行すると、その他車によって検出対象の移動経路でも不所望にGPS電波が遮断されることがあり、その場合、GPS電波遮断物体の不適切な検出が行われることとなる。
【0009】
この場合を具体例で詳述する。図6は、GPSアンテナ11とGPS受信機12と判定装置13とを具えた列車検知システムの設置箇所を示し、(a)が斜視図、(b)が背面図である。なお、列車検知システムは鉄道用車両検知システムが適当であるが、慣例に従い、以下、鉄道用車両検知システムを列車検知システムと呼ぶ。また、この呼称をシステムに用いるときには鉄道用車両を列車と呼ぶ。
レール14(軌道,移動経路)を走行する列車15(金属物体,移動体,GPS電波遮断物体)を検出するために列車検知システムを設置する際、GPSアンテナ11は列車15が上方を通過するレール14,14の間(軌道上,移動経路上)に電波受信方向上向きで設置されるが、GPS受信機12と判定装置13は特別な制約が無いので保守作業等の容易な軌道脇などに設置される(図6(a)参照)。
【0010】
設置したGPSアンテナ11には上空のGPS衛星16からGPS電波17が飛来し、それを遮るものが無ければGPS電波17がGPSアンテナ11によって受信される。
そして、列車検知システムが異常なく稼動すると、列車15が進入して来るまでは、GPS電波17がGPSアンテナ11に到達するので、GPS受信機12の出力Sに基づき、GPS電波17の受信成功に対応して、判定装置13によって「列車なし」の判定が下され、それに対応したリレー制御Rが出される。
【0011】
これに対し、列車15の到来時には、GPS電波17が列車15によって遮られてGPSアンテナ11に到達しなくなるので、GPS受信機12の出力Sに基づき、GPS電波17の受信失敗に対応して、判定装置13から「列車あり」の判定が下され、それに対応したリレー制御Rが出される。さらに、列車15が走り去った時には、再びアンテナ11にGPS電波17が到達するので、その受信成功に対応して判定装置13から「列車なし」の判定が下され、それに対応したリレー制御Rが出される。
こうして、この列車検知システムにあっては、検出対象の列車15以外にGPS電波17を遮るものが無ければ、列車15(移動体)の去来が随時的確に検出される。
【0012】
しかしながら(図6(b)参照)、隣接するレール14a,14a上を検出対象外の列車15aが走行すると、その頭部をGPSアンテナ11から見たときの仰角が例えば30〜35゜といった大角度θ3になる。この大角度θ3は、一般に環境の影響を受けやすいので使用対象から外される低空のGPS衛星16の仰角である15〜20゜程度の小角度θ1より、かなり大きい。そのため、検出対象でない列車15aが隣接の軌道14a,14aを走行すると、その列車15aによって検出対象の軌道14,14のGPSアンテナ11でも不所望にGPS電波17が遮断されることがあり、その場合、列車15が来ていないにもかかわらず列車検知システムによって列車15が到来したとの誤検出が行われることとなる。
【0013】
このような不都合を回避・防止するには、天空高いGPS衛星のみ具体的には大角度θ3より仰角の大きいGPS衛星のみを物体の検出に利用すれば良い。
しかしながら、利用するGPS衛星を限定するに際してGPS衛星の仰角が一定の閾値を上回るか下回るかということで一律に選別したのでは、その閾値が大きいと、GPS衛星の航行状況によっては利用できるGPS衛星の数が不足することにもなりかねないため、精度・確度の高いGPS電波遮断物体検出システムを構築することができない。
【0014】
もっとも、GPS電波遮断物体検出システム設置先が鉄道用車両や自動車の移動経路の場合、隣接経路を他車が走行や駐車する側面方向(横方向)のGPS衛星については、仰角の大きい衛星に限定して利用しなければならないが、GPSアンテナの臨む自経路は走行方向の前方や後方には天空が仰角の小さいところまで開けているのが一般的である。
そこで、このようなアプリケーションの特質をGPS衛星の選別基準に反映させることにより、建築物などの電波障害物の近くにGPSアンテナを設置したり、他の移動経路の隣接している移動経路に臨ませてGPSアンテナを設置しても、GPS電波遮断物体が高い精度・確度で検出されるよう、GPS電波遮断物体検出システムを改良することが技術的な課題となる。
【課題を解決するための手段】
【0015】
本発明のGPS電波遮断物体検出システムは(解決手段1)、このような課題を解決するために創案されたものであり、GPS電波を受信するためのGPSアンテナと、このアンテナを介して得たGPS信号を処理して測位結果を出力するGPS受信機と、この受信機の出力に基づいて電波受信の成否を判別したうえで電波受信成功時にはGPS電波遮断物体が存在していないと判断し電波受信失敗時にはGPS電波遮断物体が存在していると判断する判定装置とを備えているGPS電波遮断物体検出システムであって、GPS電波遮断物体の検出に使用されるGPS衛星が存在する天空上のゾーンを方位毎の仰角指定にて規定する選別用データを保持する記憶手段と、GPS電波遮断物体の検出に使用するGPS衛星をその方位および仰角と前記選別用データの方位および仰角との比較に応じて選別する選別手段とを備えたことを特徴とする。
【0016】
なお、GPSアンテナとGPS受信機と判定装置は個別実装されていても良く一体的に実装されていても良い。
また、GPS電波遮断物体は、金属物体が典型的であるが、純金属に限られる訳でなく、GPS電波を遮断しうる物であれば、金属に他の材質のものが組み合わさっていても良く、混じっていても良く、非金属からなるものであっても良い。GPS電波遮断物体の典型例としては列車や自動車が挙げられる。
【0017】
また、本発明のGPS電波遮断物体検出システムは(解決手段2)、上記解決手段1のGPS電波遮断物体検出システムであって、GPS電波遮断物体の検出に使用するGPS衛星をGPS衛星が存在する方位角及び仰角で規定される天空上のゾーンを検出物体の周囲方位毎に指定し選択する際に、各ゾーンを仰角により細分化し指定し選択できるようになっている、ことを特徴とする。
【0018】
さらに、本発明のGPS電波遮断物体検出システムは(解決手段3)、上記解決手段1,2のGPS電波遮断物体検出システムであって、GPS衛星からの電波の強度を指定する強度閾値が前記選別用データに含まれており、前記選別手段が、GPS電波遮断物体の検出に使用するGPS衛星をその受信レベルと前記強度閾値との比較に応じて選別するようになっている、ことを特徴とする。
【0019】
また、本発明のGPS電波遮断物体検出システムは(解決手段4)、上記解決手段1〜3のGPS電波遮断物体検出システムであって、GPS電波遮断物体の検出に使用するGPS衛星を、GPS衛星の電波がGPSアンテナの周囲の建造物や他のGPS電波遮断物体の影響を受けないゾーンにあるGPS衛星と、それらの影響を受けるゾーンにあるGPS衛星とに区分し、影響を受けないGPS衛星については、このうちのひとつの衛星の電波受信の成否によりGPS電波遮断物体の無し有り(存否)を判定し、一方建造物や他のGPS電波遮断物体の影響を受けるゾーンにあるGPS衛星については、複数のGPS衛星全ての電波受信の成否によりGPS電波遮断物体の存否を判定することを特徴とする。
【0020】
また、本発明のGPS電波遮断物体検出システムは(解決手段5)、上記解決手段1〜4のGPS電波遮断物体検出システムであって、GPS衛星の方位と仰角または方位と仰角と受信レベルの組データを一定期間に亘って保持するバッファ手段が設けられ、これを参照して一定期間に及ぶ安定状態の有無を検知ことにより、GPS電波遮断物体の検出に使用するGPS衛星を、一定期間に及んで方位と仰角または方位と仰角と受信レベルの安定していたものに絞り込むようになっている、ことを特徴とする。
【0021】
また、本発明のGPS電波遮断物体検出システムは(解決手段6)、上記解決手段1〜5のGPS電波遮断物体検出システムであって、前記GPSアンテナがGPS電波遮断物体の移動経路に臨んで設置されるものであり、前記移動経路に係る進行方向に基づいて前記選別用データのうち方位の部分を設定する方位設定手段が設けられている、ことを特徴とする。
【0022】
また、本発明のGPS電波遮断物体検出システムは(解決手段7)、上記解決手段6のGPS電波遮断物体検出システムであって、前記方位設定手段に加えて又は代えて、前記移動経路に隣接した他の移動経路である隣接経路が有るか無いかの情報に基づいて前記選別用データのうち仰角の部分を設定する仰角設定手段が設けられている、ことを特徴とする。
なお、方位設定手段に加えて仰角設定手段も設けた場合、両手段は、別モジュールで実装されても良く、一体化実装にて方位仰角設定手段になっていても良い。
【0023】
また、本発明のGPS電波遮断物体検出システムは(解決手段8)、上記解決手段7のGPS電波遮断物体検出システムであって、前記仰角設定手段が、前記移動経路の斜度に基づいて前記選別用データのうち前記隣接経路側の仰角の部分を加減するようになっている、ことを特徴とする。
【0024】
また、本発明のGPS電波遮断物体検出システムは(解決手段9)、上記解決手段7,8のGPS電波遮断物体検出システムであって、前記仰角設定手段が、前記隣接経路に係る走行スケジュールに基づいて前記選別用データのうち前記隣接経路側の仰角の部分を隣接経路有り時の設定値と隣接経路無し時の設定値との何れかに切り替えるようになっている、ことを特徴とする。
【発明の効果】
【0025】
このような本発明のGPS電波遮断物体検出システムにあっては(解決手段1)、GPSアンテナを検出対象のGPS電波遮断物体に搭載するのでなく、GPS電波遮断物体を検出したいところに向けてGPSアンテナを設置しておく。しかも、その設置に際し、GPS電波遮断物体が検出対象位置に存在していればそれによってGPSアンテナへのGPS電波が遮られるが、検出対象位置にGPS電波遮断物体が存在しなければGPS電波がGPSアンテナに到達するようにしておく。そうすると、そのGPSアンテナへのGPS電波の到達の有無に応じて判定装置の判定が行われ、GPS電波遮断物体の存否が検出される。このように、GPSアンテナを検出対象物から外しておいてGPS電波の受信の成否に応じてGPS電波遮断物体の無し有り(存否)が判るようにしたことにより、電波を送信する設備を自前で備えなくても物体の有無を検出することができるので、送信設備の不要な分だけ、構成が簡素化され、原価が削減される。
【0026】
GPS(全地球測位システム)は、それ用の人工衛星が発信する電波を利用し、受信機が存在する当該位置(緯度・経度・高度)を演算するシステムで、現在では携帯電話にも取り入れられているなど普及がめざましく価格も非常に安価である。本発明は、広く普及し安定したGPSを本来の測位ではなくGPS電波遮断物体の存在の検出システムに応用したものであり、人工衛星からのGPS電波がGPS電波遮断物体により遮断されたことを検知してその存否を検出することにより、従来の物体検出システムとGPS利用システムとの長所を併せ持つものとなっている。
【0027】
具体的には、GPSを利用しながらも、GPSアンテナやGPS受信機を検出対象物の外に設置できるので、設置や保守等が容易で、利便性にも優れる。
また、複数のGPS衛星からの電波を受信できるうえ、それぞれの電波には時刻情報や位置情報などユニークな情報が含まれているので、この内容を判定装置が判断することにより、GPS衛星からの正規な電波と雑音とを弁別することができる。
そのため、この発明によれば、先ず、GPS電波遮断物体検出システムを簡便かつ低廉に実現することができる。
【0028】
しかも、本発明にあっては、それに加えて、GPS電波遮断物体の検出に使用するGPS衛星を限定するようになっているが、その限定に際して、GPS衛星の仰角だけで一律に選別するのでなく、GPS電波遮断物体の検出に使用されるGPS衛星が存在する天空上のゾーンを方位毎の仰角指定にて木目細かく規定しておいて、GPS衛星の方位および仰角で選別するよう改良したことにより、天空の開けていない方位については仰角の大きいところに絞り込んでも、天空の開けている方位については仰角の小さいところまで緩めることが可能となる。
【0029】
そのため、不所望なGPS衛星の使用は避けつつも、必要な数のGPS衛星を確保することができる。
したがって、この発明によれば、建築物などの電波障害物の近くにGPSアンテナを設置したり、他の移動経路の隣接している移動経路に臨ませてGPSアンテナを設置しても、GPS電波遮断物体が高い精度・確度で検出されるようなGPS電波遮断物体検出システムを実現することができる。
【0030】
また、本発明のGPS電波遮断物体検出システムにあっては(解決手段2)、GPS電波遮断物体の検出に使用するGPS衛星をGPS衛星が存在する方位角及び仰角で規定される天空上のゾーンを検出物体の周囲方位毎に指定し選択する際に、各ゾーンを仰角により細分化し指定し選択できるようにしたことにより、GPS電波遮断物体の検出の精度・確度が更に高まる。
【0031】
さらに、本発明のGPS電波遮断物体検出システムにあっては(解決手段3)、方位および仰角での選別に加えて、GPS衛星の受信レベルと所定の強度閾値との比較に応じた選別も行われるようにしたことにより、検出の精度・確度の低下を招きやすい微弱なGPS電波しか届かないGPS衛星も使用対象から外されるので、GPS電波遮断物体がより高い精度・確度で検出されることとなる。
【0032】
また、本発明のGPS電波遮断物体検出システムにあっては(解決手段4)、GPS電波遮断物体の検出に使用するGPS衛星をGPSアンテナの周囲の建造物や他のGPS電波遮断物体の影響の有無により選別し、存否の判定をひとつのGPS衛星の電波受信の成否によるのか、複数のGPS衛星の論理積とし存否の判定の確度を向上させることができるようにしたことにより、GPS電波遮断物体の検出の精度・確度が更に高まる。
【0033】
重複も辞さずに詳述すると、GPS受信アンテナは、あらゆる方向から到来する電波を受信する構造・機能になっているので、受信機にはGPS衛星から直接到来する電波のほかに、周囲の建造物や付近を移動する他のGPS電波遮断物体に反射して到来する電波(マルチパス波)が到来する。GPSの測位システムにおいてはこのマルチパス波が測位の精度を下げる要因となるので、これを排除することが必要となる。仰角の低い衛星ほどマルチパス波が発生しやすいので、仰角の高い衛星のみを使用することによりマルチパス波による不都合を排除できる。しかし、仰角の大きい衛星のみを使用することは使用できる衛星数が少なくことになりGPS衛星の運行状況によってはGPS衛星がひとつも捕捉できない場合もありうる。
【0034】
GPS電波遮断物体の検出システムでは、GPS電波遮断物体が存在することによりGPS電波の強度が低下し、存在しなくなったときにGPS電波の強度が回復することを利用してGPS電波遮断物体の存否を検出するものでGPS電波の強度が重要であり、GPSの測位システムのようにGPS衛星から得られる到達時刻などマルチパス波によって直接影響を受ける要素は2次的である。
こうしたことから、GPS電波遮断物体の検出システムでは、仰角が低くマルチパス波が発生しやすい衛星も積極的に利用しようとするものである。しかしながら、仰角が低い衛星の電波は隣接して走行する他の車両や自動車の影響を受けやすく、マルチパス波が車両や自動車の床下に潜り込む可能性も大きい。そこで、仰角の小さい衛星を利用する場合には、複数の衛星の論理積をとるようにして、精度を確保するのである。
【0035】
また、本発明のGPS電波遮断物体検出システムにあっては(解決手段5)、GPS衛星の方位角および仰角(又は方位角と仰角と受信レベルと)を一定期間に亘って監視して、GPS電波遮断物体の検出に使用するGPS衛星を方位や仰角(又は更に受信レベルも)が一定期間に及んで安定していたものに絞り込むようにしたことにより、GPS衛星のゾーン出入時の揺らぎの不所望な影響を排除・抑制することができる。すなわち、GPS衛星が選択されたゾーン内に進入あるいはゾーンから進出するときに、ゾーン境界付近において衛星の方位角や仰角あるいは電波の強度がしばしば揺らぐが、その揺らぎに起因してGPS衛星が選択対象に該当したり、それから外れたりする、といった不所望な事態が生じるのを簡便かつ的確に防ぐことができる。
【0036】
また、本発明のGPS電波遮断物体検出システムにあっては(解決手段6)、移動経路に係る進行方向に基づいて選別用データのうち方位の部分が自動設定されるようにしたことにより、煩雑で間違いやすい多量のデータの設定作業を方位に関しては簡便かつ正確に済ませられることとなる。移動経路を走行する移動体を検出する場合、隣接経路を走行する移動体の影響を受ける右/左の側面は、天空高い(仰角が大きい)衛星に限定するのが良く、天空が開けている前方/後方は、多くの衛星(仰角が大きいところから小さいところまで)を選択して検知するのが良いので、ゾーン形状が或る程度は固定可能であるところ、移動経路の前後左右が場所によって変わるため、それに合わせてゾーンの規定値・設定値を調整しなければならないが、進行方向に基づいて方位の部分が自動設定されるので調整作業が簡便になる。
【0037】
また、本発明のGPS電波遮断物体検出システムにあっては(解決手段7)、隣接経路の有無に応じて仰角の部分が自動設定されるので、きめ細かい仰角設定を簡便に済ませることができる。
【0038】
また、本発明のGPS電波遮断物体検出システムにあっては(解決手段8)、移動経路の斜度に基づいて隣接経路側の仰角が自動で加減されるようにしたことにより、隣接経路からの影響がより的確に反映されることとなる。
【0039】
また、本発明のGPS電波遮断物体検出システムにあっては(解決手段9)、隣接経路に係る走行スケジュールに基づいて隣接経路側の仰角が隣接経路有り時の設定値と隣接経路無し時の設定値との何れかに自動で切り替わるようにしたことにより、隣接経路からの影響が一層的確に反映されることとなる。
【発明を実施するための最良の形態】
【0040】
このような本発明のGPS電波遮断物体検出システムについて、これを実施するための具体的な形態を、以下の実施例1〜4により説明する。
図1〜2に示した実施例1は、上述した解決手段1〜6(出願当初の請求項1〜6)を具現化したものであり、図3に示した実施例2は、上述した解決手段7(出願当初の請求項7)を具現化したものであり、図4に示した実施例3は、上述した解決手段8(出願当初の請求項8)を具現化したものであり、図5に示した実施例4は、上述した解決手段9(出願当初の請求項9)を具現化したものであり、何れも列車検知システムへの適用例である。
【実施例1】
【0041】
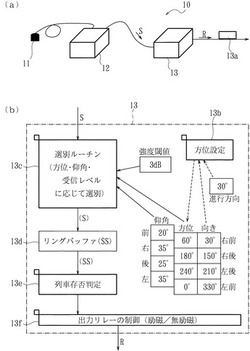
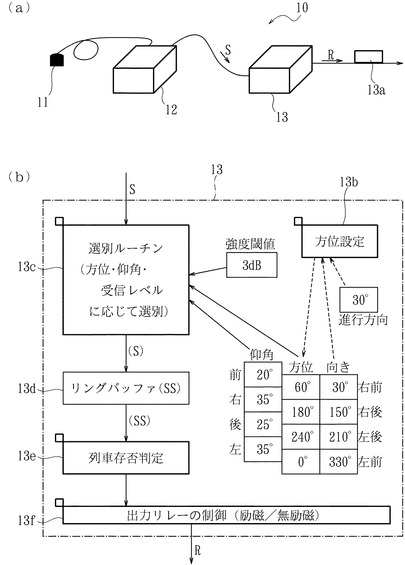
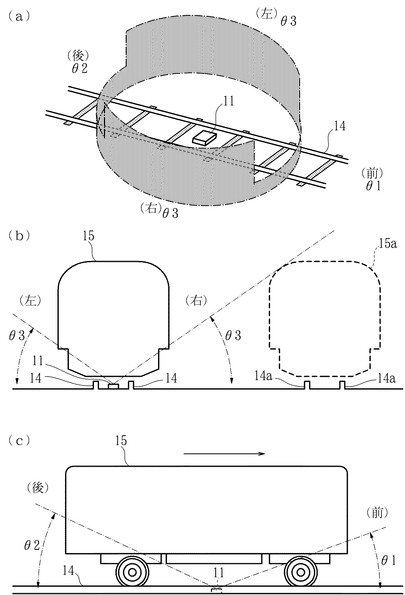
本発明のGPS電波遮断物体検出システムの実施例1である列車検知システム10について、その具体的な構成を、図面を引用して説明する。図1は、(a)が列車検知システム10の斜視図、(b)が判定装置13の機能ブロック図である。また、図2は、(a)が選別用囲繞壁イメージの斜視図、(b)が設置箇所の背面図、(c)が設置箇所の側面図である。
【0042】
この列車検知システム10は(図1(a)参照)、GPSアンテナ11とGPS受信機12と判定装置13とを具えている。判定装置13には、上位の駅装置や連動装置などへ検知結果を送出するための出力リレー13aが付設されている。
GPSアンテナ11は、GPS衛星から送られてくるGPS電波を受信できれば市販の汎用品で足り、実装形態もフィルム形やプレート形など任意である。
GPS受信機12は、同軸ケーブルやBNCコネクタ等でGPSアンテナ11と接続されており、GPSアンテナ11を介して得たGPS信号を処理して測位結果を出力するものであれば市販の汎用品で足りる。その出力Sには一般に時刻情報と位置情報とが含まれるが、電波の強度を示すGPS電波の受信レベルも数値で出力する受信機が使い易い。GPS受信機が存在する当該位置情報は、緯度・経度・高度の組データで出力され、また衛星の天空上の位置情報は方位角と仰角の組データで出力される。
【0043】
判定装置13は(図1(a)参照)、例えばマイクロプロセッサやデジタルシグナルプロセッサを主体とした論理演算ユニットであり、GPS受信機12の出力Sを随時入力し、その出力Sに基づいて電波受信の成否を判別して、その判別結果に応じて出力リレー13aを駆動するために、方位設定ルーチン13bと選別ルーチン13cと列車存否判定ルーチン13eとリレー制御ルーチン13fといったプログラムモジュールが不揮発性のプログラム用メモリにインストールされるとともに、不揮発性で書換可能なEEPROMや揮発性で書換可能なSRAMといった適宜なデータ用メモリからなる記憶手段には、リングバッファ13dと選別用データと進行方向とが保持されている。
【0044】
進行方向は、移動経路に係る進行方向であり、レール14,14からなる軌道に臨んでGPSアンテナ11が設置される列車検知システムにあっては、その軌道を走行する列車15が前進する方向であり、例えば北から時計回りに測った方位角で「30゜」などと表される。この進行方向の指定は、製造時や調整時にPROMの割当領域にROMライタ等で書き込んでも良く、現場で設置時にデータ送信を行ってSRAMの割当領域に設定させても良く、要するに、方位設定ルーチン13bが選別用データの自動設定に用いるときまでに進行方向の値の指定作業が済んでいれば良い。
【0045】
選別用データには強度閾値と選別用囲繞壁イメージデータとが含まれており、そのうち強度閾値は、GPS衛星16からの電波の強度を指定するものであり、例えば電磁波の減衰量を示す単位のデシベルを用いて「3dB」などと表される。この強度閾値は、設置先に依存しない定数で良いので、強度閾値の指定は、固定的な書き込みで足りる。
選別用囲繞壁イメージ(図2(a)参照)のデータは(図1(a)参照)、GPSアンテナ11設置先のレール14を走行する列車15を検出するのに使用されるGPS衛星16が存在する天空上のゾーンを規定するためのものであり、GPSアンテナ11設置先の上空の半球イメージを、方位毎の仰角で境界を指定することで、GPS衛星使用側の上空ゾーンと、地上寄りでGPS衛星不使用側の選別用囲繞壁イメージとに、分けている。
【0046】
具体的には、水平を基準にした仰角を右と後と左と前とについて規定した仰角データ列と、北を基準にした時計回りの方位角を右前と右後と左後と左前とについて規定した方位データ列と、前方を基準とした時計回りの角度で向きを右前と右後と左後と左前とについて規定した向きデータ列とが、確保されている。そのうち方位データ列と仰角データ列は使用側の上空ゾーンと不使用側の選別用囲繞壁イメージとの境界を規定するものであり、向きデータ列は方位データ列の自動設定に用いられるものであり、この向きデータ列には、例えば右前「30゜」,右後「150゜」,左後「210゜」,左前「330゜」といった値が予め固定的に設定されている。
【0047】
また、仰角データ列には、例えば右「35゜」,後「25゜」,左「35゜」,前「20゜」といった値がやはり予め固定的に設定されている。
仰角データ列における左右の「35゜」は、レール14に設置されたGPSアンテナ11からレール14a上の列車15aを見上げたときの仰角である大角度θ3の安全側の値である(図2(b)参照)。仰角データ列における前「20゜」は、一般に環境の影響を受けやすいので使用対象から外される低空のGPS衛星16の仰角である小角度θ1の安全側の値である(図2(c)参照)。仰角データ列における後「25゜」は、小角度θ1より少し大きい中角度θ2になっている。
【0048】
前後で角度の異なる理由は次のようなことからである。例えば、レール14を横断する踏切道があり、この踏切道に近接して列車進行方向前方にGPSアンテナ11を設置したとすると、踏切道を走行する自動車などによりGPS電波17が不所望に遮断されることがあるが、これを回避するために、GPSアンテナ11から自動車の頭上を見通せるよう、後方の中角度θ2を前方の小角度θ1より少し大きくしたのである。このように、仰角データ列、方位データ列は、GPSアンテナ11の設置箇所の周囲の環境により適宜設定される値である。また、この例では方位を前後、左右の4つ方向に規定したが、もっと細分化してもよく、(請求項2記載のように)仰角についても細分化してもよい。
【0049】
方位設定ルーチン13bは(図1(b)参照)、選別用データの進行方向の指定値に基づいて選別用データの方位データ列を自動設定するものであり、進行方向が指定済みであれば随時実行しても良いが、この例の場合、方位データ列が不揮発性メモリに保持されるのであれば現場設置や現場調整の後の初期化の一部として実行すれば足り、方位データ列が揮発性メモリに保持されるのであれば電源投入後やリセット後の初期化の一部として実行すれば足りる。そして、実行時には向きデータ列の各データ値に進行方向の値を加算してから360゜の剰余をとるものであり、上述した数値例を踏襲すると、方位データ列に右前「60゜」,右後「180゜」,左後「240゜」,左前「0゜」といった値を自動設定するようになっている。
【0050】
選別ルーチン13cは、レール14を走行する列車15の検出に使用するGPS衛星16を選別するものであり、GPS受信機12の出力Sにて受信成功の確認されたGPS衛星16を総て列車存否判定に使用するのでなく、GPS受信機12の出力Sから直に得られた又は適宜な演算を施して得たGPS衛星16の方位と仰角と受信レベルとをそれぞれ選別用データの方位と仰角と強度閾値と比較し、その比較結果に応じて限定するようになっている。その内容は、GPS衛星16の受信レベルが十分に強く且つGPS衛星16の方位角および仰角による天空位置が使用側の上空ゾーンに入っているものに限って使用し、辛うじて受信に成功しても受信レベルの弱いGPS衛星16や選別用囲繞壁イメージの先のGPS衛星16は受信に失敗したと擬制して検出に使用しないというものである。
【0051】
具体的には、GPS衛星16の受信レベルの値が選別用データの強度閾値を上回っており、GPS衛星16の方位値が右側を示しているとき即ちその方位値が選別用データの方位データ列における右前から右後までの範囲に入っているならばGPS衛星16の仰角値が選別用データの仰角データ列における右の値を上回っており、GPS衛星16の方位値が後側を示しているとき即ちその方位値が選別用データの方位データ列における右後から左後までの範囲に入っているならばGPS衛星16の仰角値が選別用データの仰角データ列における後の値を上回っている、という限定条件が課される。
【0052】
さらに、GPS衛星16の方位値が左側を示しているとき即ちその方位値が選別用データの方位データ列における左後から左前までの範囲に入っているならばGPS衛星16の仰角値が選別用データの仰角データ列における左の値を上回っており、GPS衛星16の方位値が前側を示しているとき即ちその方位値が選別用データの方位データ列における左前から右前までの範囲に入っているならばGPS衛星16の仰角値が選別用データの仰角データ列における前の値を上回っている、という限定条件が課される。そして、これらの限定条件をクリアしたGPS衛星16についてだけ、その方位と仰角と受信レベルの組データをリングバッファ13dに書き込むようになっている。
【0053】
リングバッファ13dは、例えば配列領域とポインタとで構成される先入れ先出し方式のFIFOキューであり、方位と仰角と受信レベルの組データ(S)を一定期間に亘って保持するバッファ手段として機能するために、方位と仰角と受信レベルの組データ(S)が新たに書き込まれると一定数までは増長して蓄積量を増すが一定数に達すると最も旧い組データ(S)を消去して蓄積量を一定に維持するようになっている。また、リングバッファ13dに蓄積された方位と仰角と受信レベルの組データ群(SS)は、時系列に並んでおり、総てが列車存否判定ルーチン13eから参照可能になっている。
【0054】
列車存否判定ルーチン13eは、GPS受信機12の出力Sを直に使用するのでなく上記リングバッファ13dの組データ群(SS)を参照することにより、GPS受信機12の出力Sに基づく電波受信の成否判別ひいては列車15の存否判定を行うものであるが、リングバッファ13dを参照したときに、各GPS衛星16について方位と仰角と受信レベルとが一定期間に及んで安定していると言える状態に有るのか無いのかを検知し、その結果に応じた更なる選別を行うことで、列車15の検出に使用するGPS衛星16を、一定期間に及んで方位および仰角の安定していたものに絞り込むようになっている。
【0055】
一定期間に及んで安定していると言える基準としては、それぞれのGPS衛星16について、例えば、一定期間に亘る総てのサンプリングタイミングで電波受信に成功して一連の方位と仰角と受信レベルの組データ(S)が組データ群(SS)に含まれていることや、80%以上のサンプリングタイミングで電波受信に成功していること、電波受信の成功と失敗との遷移が所定回数を超えないこと、等が挙げられる。
電波受信の成功と失敗との遷移の基準として更なる擬制も採用されており、このルーチン13eは、成功時の受信レベルに比べて受信レベルが例えば半減したときには電波受信が成功から失敗へ遷移したと擬制し、失敗を擬制した受信レベルから受信レベルが例えば倍増したときには電波受信が失敗から成功へ遷移したと擬制するようになっている。
【0056】
列車存否判定ルーチン13eは、それらの基準に基づいてGPS衛星16からの電波受信の有無を切り分けて、電波受信成功時には「列車なし」(GPS電波遮断物体が存在していない)と判断し、電波受信失敗時には「列車あり」(GPS電波遮断物体が存在している)と判断して、その判断結果をリレー制御ルーチン13fに引き渡すようになっている。
さらに、列車存否判定ルーチン13eは、GPS衛星16が複数台存在するうえ夫々のGPS電波17に時刻情報や位置情報が含まれているのを利用した次の機能拡張がなされている。
【0057】
すなわち、列車15(移動体,GPS電波遮断物体)を検出対象とする鉄道の列車検知システム10では、安全確保のために列車が存在することを優先して検出したいので、列車存否判定ルーチン13eの判定処理では、受信していた複数個たとえば3個のGPS衛星からのGPS電波のうち1個でも途絶えた場合には「列車あり」(列車が存在する)と判断し、逆に3個全てからGPS電波の受信があり、かつそこに含まれる時刻情報や位置情報がGPS運行スケジュールに照らして適正であるかどうかを判断し、これも正当な場合に限って「列車なし」(列車が存在しない)と判断するようになっている。
【0058】
リレー制御ルーチン13fは(図1(b)参照)、列車存否判定ルーチン13eの判定結果に応じてリレー制御Rを生成するものであり、「列車なし」のときにはリレー制御Rを励磁状態にし、「列車あり」のときにはリレー制御Rを無励磁状態にするようになっている。
出力リレー13aは(図1(a)参照)、判定装置13により制御され、判定装置13からのリレー制御Rによって励磁されたり励磁されなかったりするものであり、励磁状態が「列車なし」すなわち「GPS電波遮断物体が存在しない状態」に対応し、無励磁状態が「列車あり」すなわち「GPS電波遮断物体が存在する状態」に対応している。
【0059】
この実施例1の列車検知システム10システムについて、その使用態様及び動作を、図面を引用して説明する。図2は、(a)が選別用囲繞壁イメージの斜視図、(b)が設置箇所の背面図、(c)が設置箇所の側面図である。
【0060】
レール14(軌道,移動経路)を走行する列車15(金属物体,移動体,GPS電波遮断物体)を検出するために列車検知システム10を設置する際、GPSアンテナ11は列車15が上方を通過するレール14,14の間(軌道上,移動経路上)に電波受信方向上向きで設置されるが、GPS受信機12と判定装置13は特別な制約が無いので保守作業等の容易なところに設置して良い。設置したGPSアンテナ11には上空のGPS衛星16からGPS電波17が飛来し、それを遮るものが無ければ、GPS電波17がGPSアンテナ11によって受信される。
【0061】
また、システム設置時かそれ以前に、GPSアンテナ11の設置先でレール14上を走行する列車15の前進方向を、判定装置13の選別用データの進行方向に、上述した何れかの手法で、設定しておく。
そして、列車検知システム10が稼動すると、判定装置13では、初期化のため最初だけ方位設定ルーチン13bが起動されて、選別用データについて、進行方向と向きデータ列とに基づいて方位データ列に右前「60゜」,右後「180゜」,左後「240゜」,左前「0゜」といった値が自動設定される。なお、選別用データの仰角データ列には右「35゜」,後「25゜」,左「35゜」,前「20゜」といった値が予め設定されており、選別用データの強度閾値には3dBといった値がやはり予め設定されている。
【0062】
初期化が済んで定常状態に移行すると、判定装置13では選別ルーチン13cと列車存否判定ルーチン13eとリレー制御ルーチン13fが並行して又は所定周期の順次繰り返し等で実行される。
そして、列車15が進入して来るまでは、幾つかのGPS衛星16からGPS電波17がGPSアンテナ11に到達し、それらのGPS衛星16の情報がGPS受信機12の出力Sに含められて判定装置13に入力され選別ルーチン13cに引き渡される。選別ルーチン13cでは GPS受信機12の出力Sから得た幾つかのGPS衛星16の方位と仰角と受信レベルと、選別用データの方位と仰角と強度閾値とが、それぞれ比較され、その比較結果に応じて限定がなされる。
【0063】
そのため、GPS衛星16の受信レベルが十分に強く且つGPS衛星16の天空位置が使用側の上空ゾーンに入っているものに限って、そのGPS衛星16に係る方位と仰角と受信レベルの組データ(S)がリングバッファ13dに蓄積される。
そのリングバッファ13dに蓄積された方位と仰角と受信レベルの組データ群(SS)が列車存否判定ルーチン13eによって参照されて、列車15の存否判定に使用されるGPS衛星16が、一定期間たとえば4秒(実測による経験値)に及んで方位と仰角と受信レベルの安定していたものに更に絞り込まれる。
【0064】
こうして限定されたGPS衛星16の情報に基づき、判定装置13では、GPS電波17の受信成功に対応して、列車存否判定ルーチン13eによって「列車なし」の判定が下され、それに対応したリレー制御Rがリレー制御ルーチン13fによって出される。
これに対し、列車15の到来時には、GPS電波17が列車15によって遮られてGPSアンテナ11に到達しなくなるので、GPS受信機12の出力Sに基づき、GPS電波17の受信失敗に対応して、判定装置13から「列車あり」の判定が下され、それに対応したリレー制御Rが出される。ただし、この判定に際しても、GPS受信機12の出力Sの方位と仰角と受信レベルがそのまま使用されるのでなく、上述の選択にて限定された方位と仰角と受信レベルが使用される。
【0065】
さらに、列車15が走り去った時には、再びアンテナ11にGPS電波17が到達するので、その受信成功に対応して判定装置13から「列車なし」の判定が下され、それに対応したリレー制御Rが出される。このときも、判定には、GPS受信機12の出力Sそのままでなく、上述の選択にて限定された方位と仰角と受信レベルが使用される。
こうして、この列車検知システム10でも、課題の欄において既述した図6(a)の列車検知システムと同様、検出対象の列車15以外にGPS電波17を遮るものが無ければ、列車15(移動体)の去来が随時的確に検出される。
【0066】
しかも、この列車検知システム10にあっては、課題の欄において既述した図6(a)の列車検知システムと異なり、左右の側方(横方向)には仰角が大角度θ3を上回る上空ゾーンのGPS衛星16に限って列車存否判定に使用しているので(図2(b)参照)、検出対象でない隣のレール14aを他の列車15aが走行しても、その影響を受けることがない。一方、視界の開けている前方や後方については仰角が小角度θ1や中角度θ2を上回っているGPS衛星16が列車存否判定に使用されるので、使用可能なGPS衛星16が1個や2個まで減ってしまうこともない。
【0067】
それに加え、この列車検知システム10にあっては、列車存否判定に使用するGPS衛星16の限定について、受信レベルが強度閾値を超えるGPS衛星16に限定するとともに、方位と仰角と受信レベルとが一定時間に及んで安定しているGPS衛星16に限定することも行われるので、検出対象のレール14上を走行する列車15の去来が高い精度・確度で検出されるのである。
【実施例2】
【0068】
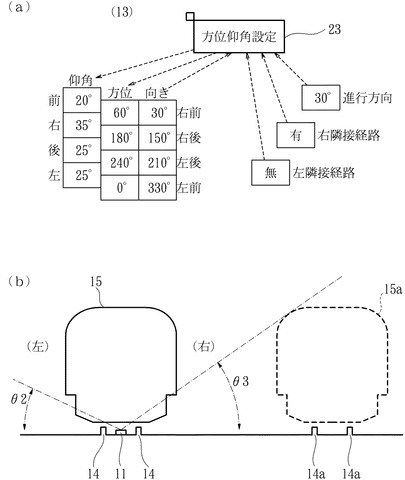
本発明のGPS電波遮断物体検出システムの実施例2について、それを具体化した列車検知システムの構成を、図面を引用して説明する。図3は、(a)が方位仰角設定ルーチン23のブロック図、(b)が設置箇所の背面図である。
この列車検知システムが上述した実施例1のものと相違するのは方位設定ルーチン13bが機能拡張されて方位仰角設定ルーチン23になった点と、選別用データに右隣接経路フラグと左隣接経路フラグとが追加されている点である。
【0069】
右隣接経路フラグには、検出対象の軌道14,14の右側に検出対象外の隣接軌道(隣接経路)が有るのか無いのかが設定され、左隣接経路フラグには、検出対象の軌道14,14の左側に検出対象外の隣接軌道が有るのか無いのかが設定される。その設定は上述した進行方向の設定と同様にしてなされるようになっている。
方位仰角設定ルーチン23は、上述した方位データ列の自動設定に加え、検出対象外の隣接軌道が有るか無いかの情報を保持する右隣接経路フラグと左隣接経路フラグとを参照し、その情報に基づいて選別用データのうち仰角の部分を自動設定する。
【0070】
具体的には、右隣接経路フラグが「有」のときには仰角データ列における右のところに大角度θ3「35゜」を設定し、右隣接経路フラグが「無」のときには仰角データ列における右のところに中角度θ2「25゜」を設定し、左隣接経路フラグが「有」のときには仰角データ列における左のところに大角度θ3「35゜」を設定し、左隣接経路フラグが「無」のときには仰角データ列における左のところに中角度θ2「25゜」を設定するようになっている。
【0071】
この場合、設置先であって検出対象になっているレール14,14(軌道)の右側にだけ検出対象外のレール14a,14a(隣接軌道)が存在しているものとして、装置稼動までに予め、右隣接経路フラグを「有」に設定し、左隣接経路フラグを「無」に設定しておく。そうすると、初期化時に自動で、選別用データの仰角データ列における右のところには大角度θ3「35゜」が設定され、その仰角データ列における左のところには中角度θ2「25゜」が設定される。
これにより、列車存否判定に使用されるGPS衛星16が入っている上空ゾーンが、隣接軌道の無い左側については後方と同様に下方へ広げられる。
【0072】
そして、初期化が済んで定常状態に移行してからは、上例と同様にして列車15の去来が検出されるが、選別用データの仰角データ列の設定が隣接軌道の有無に対応してきめ細かくなされていて、他の列車の不所望な影響を受けることなく使用側の上空ゾーンが広がっているので、列車存否判定に有効に使用できるGPS衛星16の数が増えるため、検出対象外のレール14a,14aが右側に存在しているレール14,14に臨ませてGPSアンテナ11を設置しても、レール14,14上を走行する列車15を高い精度・確度で検出することができる。
【実施例3】
【0073】
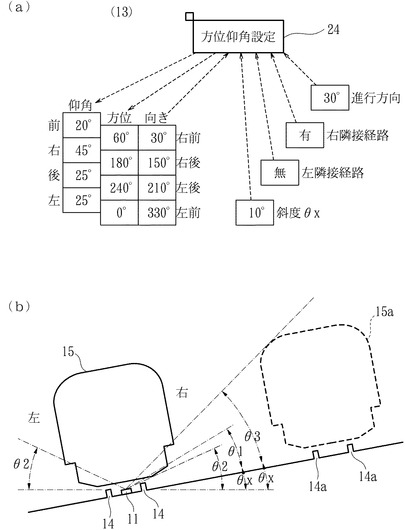
本発明のGPS電波遮断物体検出システムの実施例2について、それを具体化した列車検知システムの構成を、図面を引用して説明する。図4は、(a)が方位仰角設定ルーチン24のブロック図、(b)が設置箇所の背面図である。
この列車検知システムが上述した実施例2のものと相違するのは方位設定ルーチン23が機能拡張されて方位仰角設定ルーチン24になった点と、選別用データに斜度θxのデータ領域が追加されている点である。
【0074】
斜度θxには、検出対象の軌道14,14の横方向における水平からの傾斜角度が設定される。斜度θxの指定値は設置現場で実測され、その設定は上述した進行方向や隣接経路の設定と同様にしてなされるようになっている。
方位仰角設定ルーチン24は、上述した方位データ列や仰角データ列の自動設定に加え、検出対象の軌道14,14(移動経路)の斜度θxに基づいて選別用データのうち仰角データ列における左右のところの仰角値を自動で加減するようになっている。なお、その加減は、斜度θxが正負の値をとるときには加算演算だけで具現化され、斜度θxが正の値だけの場合、上側は加算で、下側は減算で、具現化される。
【0075】
具体的には、右隣接経路フラグが「有」のときには仰角データ列における右のところに斜度θxの値を加減し、左隣接経路フラグが「有」のときには仰角データ列における左のところに斜度θxの値を加減する。ただし、何れの場合も、その加減によって中角度θ2を下回るときには中角度θ2を下限として中角度θ2を設定する。また、隣接経路フラグが「無」のときでも、左右のうち斜め上の方には、小角度θ1に斜度θxを加えたものと中角度θ2とのうち大きい方の値を設定するようになっている。
【0076】
この場合、設置先であって検出対象になっているレール14,14(軌道)の右側にだけ検出対象外のレール14a,14a(隣接軌道)が存在しているうえ、レール14a側を斜め上にして斜度θxだけ軌道面が傾斜しているものとして、装置稼動までに予め、右隣接経路フラグを「有」に設定し、左隣接経路フラグを「無」に設定し、現場で計測した軌道14,14の傾斜角度たとえば「10゜」を斜度θxに設定しておく。そうすると、初期化時に自動で、選別用データの仰角データ列における右のところには大角度θ3「35゜」が設定され、その仰角データ列における左のところには中角度θ2「25゜」が設定され、さらに、その後、選別用データの仰角データ列における右のところだけ斜度θxを加えられて「45゜」に修正される。
【0077】
これにより、列車存否判定に使用されるGPS衛星16が入っている上空ゾーンが隣接軌道の無い左側については過剰になるのを避けつつ下方へ広げられるとともに、隣接軌道の有る右側については、軌道の傾斜によって検出対象外のレール14a上の列車15aの頭部の見掛けの高さが増した分だけ、使用側の上空ゾーンが上方へ狭められる。
そして、初期化が済んで定常状態に移行してからは、上例と同様にして列車15の去来が検出されるが、この場合も、その検出が高い精度・確度でなされる。
【0078】
すなわち、選別用データの仰角データ列の設定が隣接軌道の有無や軌道の傾斜に対応してきめ細かくなされていて、他の列車の不所望な影響を受けることなく使用側の上空ゾーンが広がっているうえ、軌道の傾斜の不所望な影響も受けないよう上空ゾーンに更なる微調整も施されているので、列車存否判定に有効に使用できるGPS衛星16の数が増えるため、検出対象外のレール14a,14aが右側に存在しているばかりか横方向に傾いているレール14,14に臨ませてGPSアンテナ11を設置しても、レール14,14上を走行する列車15を高い精度・確度で検出することができる。
【実施例4】
【0079】
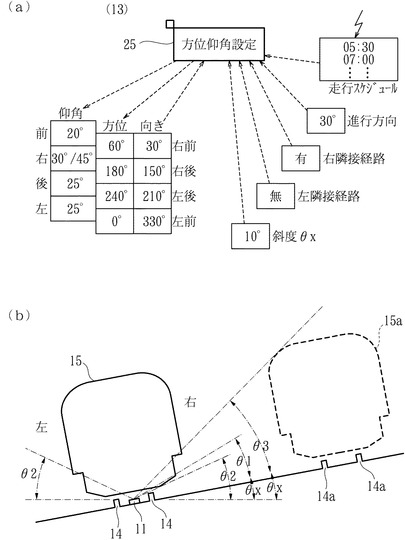
本発明のGPS電波遮断物体検出システムの実施例4について、それを具体化した列車検知システムの構成を、図面を引用して説明する。図5は、(a)が方位仰角設定ルーチン25のブロック図、(b)が設置箇所の背面図である。
この列車検知システムが上述した実施例3のものと相違するのは方位設定ルーチン24が機能拡張されて方位仰角設定ルーチン25になった点と、選別用データに走行スケジュールのデータ保持領域が追加されている点である。
【0080】
走行スケジュールは、検出対象外の隣接軌道(レール14a,14a)に係る列車15aの走行スケジュールであり、検出対象の軌道(レール14,14)に臨むGPSアンテナ11の設置箇所の隣を通過する各時刻を保持している。右隣接経路フラグも左隣接経路フラグも「無」のときには走行スケジュールの設定が要らないが、右隣接経路フラグが「有」のときには右側の隣接軌道に係る走行スケジュールを設定し、左隣接経路フラグが「有」のときには左側の隣接軌道に係る走行スケジュールを設定し、両フラグが「有」なら走行スケジュールを二つ設定するようになっている。それらの設定は、上述した進行方向等の設定と同様にしても良いが、走行スケジュールは予定時刻の変更が避けられないので、図示しない集中監視装置などから通信にて随時ダウンロードするのが望ましい。
【0081】
方位仰角設定ルーチン25は、初期化時に上述の方位データ列や仰角データ列の自動設定を行うのに加えて、装置稼動中に随時、隣接軌道に係る走行スケジュールに基づいて選別用データのうち選別用データのうち仰角データ列における隣接軌道側の仰角値を隣接軌道有り時の設定値と隣接軌道無し時の設定値との何れかに自動で切り替えるようになっている。また、実運行の変動を考慮して走行スケジュールでの規定時刻の前後に幅を持たせた時間帯において隣接軌道有り時の設定値を設定するようにもなっている。
【0082】
具体的には、走行スケジュールでの規定時刻の例えば5分前に仰角データ列における隣接軌道側の仰角値を隣接軌道有り時の設定値で上書きし、走行スケジュールでの規定時刻の例えば10分後に、走行スケジュールで以後の規定時刻を調べて5分後以内に迫っているものが無ければ、仰角データ列における隣接軌道側の仰角値を隣接軌道無し時の設定値に戻すようになっている。なお、上述したように、隣接軌道有り時の設定値は[大角度θ3+斜度θx]と[中角度θ2]とのうち大きい方であり、隣接軌道無し時の設定値は[小角度θ1+斜度θx]と[中角度θ2]とのうち大きい方である。
【0083】
この場合、設置先であって検出対象になっているレール14,14(軌道)の右側にだけ検出対象外のレール14a,14a(隣接軌道)が存在しているうえ、レール14a側を斜め上にして斜度θxだけ軌道面が傾斜しているものとして、装置稼動までに予め、右隣接経路フラグを「有」に設定し、左隣接経路フラグを「無」に設定し、現場で計測した軌道14,14の傾斜角度たとえば「10゜」を斜度θxに設定しておく。そうすると、初期化時に自動で、選別用データの仰角データ列における右のところには大角度θ3「35゜」が設定され、その仰角データ列における左のところには中角度θ2「25゜」が設定され、さらに、その後、選別用データの仰角データ列における右のところだけ斜度θxを加えられて「45゜」に修正される。また、仰角データ列における右について、隣接軌道有り時の設定値は[大角度θ3+斜度θx]の「45゜」になり、隣接軌道無し時の設定値は[小角度θ1+斜度θx]の「30゜」になる。
【0084】
さらに、走行スケジュールがダウンロードされると、初期でなくても方位仰角設定ルーチン25が起動されて、選別用データの仰角データ列における右のところについて再設定が行われる。すなわち、現在時刻と走行スケジュールの規定時刻とが比較されて、走行スケジュールの何れかの規定時刻の5分前から10分後までの間に現在時刻が入っているときには仰角データ列における右のところに「45゜」が設定され、そうでないときには「30゜」が設定される。方位仰角設定ルーチン25によるこの再設定処理は、定期的・周期的に、あるいは走行スケジュールに基づいて必要時に、繰り返し行われる。
【0085】
これにより、列車存否判定に使用されるGPS衛星16が入っている上空ゾーンが隣接軌道の無い左側については過剰になるのを避けつつ下方へ広げられるとともに、隣接軌道の有る右側については、軌道の傾斜によって検出対象外のレール14a上の列車15aの頭部の見掛けの高さが増した分だけ使用側の上空ゾーンが上方へ狭められるが、隣のレール14a上の列車15aによる不所望な影響を回避するための上空ゾーン限定は、隣のレール14a上に列車15aが来る可能性の高い時間帯だけ行われ、隣のレール14a上に列車15aが来ない時間帯には行われない。
このように、上空ゾーンの規定に際し、方位毎のきめ細かな調整に加えて、時間帯毎のきめ細かな調整も行われるので、列車15が高い精度・確度で検出される。
【0086】
[その他]
上記実施例で、方位設定ルーチンや方位仰角設定ルーチンによる選別用囲繞壁イメージは前後左右の方位に対して仰角を階段状に設定するようになっていたが、方位の設定は前後左右に限られるものでなく例えば45゜単位や10゜単位あるいはその組み合わせなどで細分化しても良く、仰角の設定は不連続な階段状に限らず例えば折れ線や曲線を表す関数などで連続的にしても良い。
また、上記実施例では、GPSアンテナ11が一軌道のレール14,14の間に設置されていたが、GPS電波17の遮断/非遮断が列車15の存否に応じてなされれば、GPSアンテナ11はレール14に臨む他所に設置しても良い(特許文献4,5参照)。
【0087】
さらに、上記実施例では、GPSアンテナとGPS受信機と判定装置とが別体になっていて有線接続されていたが、これらは実装に際して適宜一体化しても良く無線接続しても良い。例えば、GPSアンテナ及びGPS受信機としてGPS機能を備えた携帯電話を採用して、GPS電波遮断物体を検出したい位置に携帯電話を置き、その検出結果を携帯電話の通信機能により遠隔地の判定装置に通知するようにしても良い。
また、上記実施例では、方位設定ルーチン13bと選別ルーチン13cが判定装置13にインストールされていたが、これらのルーチン13b,13cは、判定装置13から抜き出して、GPS受信機12にインストールしても良く、GPS受信機12の出力Sの信号伝送ケーブル等に介挿接続される別体の論理演算装置やマイクロプロセッサシステム等に搭載しても良い。
【0088】
また、上記実施例では、フェールセーフについて言及していないが、列車検知システムにフェールセーフ性が要求される場合、判定装置にフェールセーフな装置を採用したうえで、GPSアンテナからGPS受信機を経て判定装置に至るGPS地上装置およびその伝送系の健全性をGPS受信機の出力に基づいて監視するよう判定装置を改造することにより、システム全体をフェールセーフなものにすることができる(特許文献5参照)。
また、地上側に設置するGPSアンテナの有効面積を変えることにより、あるいはGPSアンテナと検出対象物の最接近面との離隔距離を変えることにより、検出対象物体の大きさを変えることができる。
【産業上の利用可能性】
【0089】
本発明のGPS電波遮断物体検出システムは、金属物体等のGPS電波遮断物体をその外から検出することができるので、上記実施例で挙げた列車検出システムのように鉄道用車両が走行する軌道から鉄道用車両の進入進出を検出するのに好適なものであるが、その他の応用も可能である。例えば(特許文献4,5参照)、軌道脇から鉄道用車両の進入進出を検出することや、自動車が駐車する駐車場側から自動車の駐車発車を検出すること、貸し駐車場の出入り口で自動車の入出庫を検出すること、所定位置に置いた金属物体が継続設置されているか持ち去られたかを検出することなどにも、適用することができる。
【図面の簡単な説明】
【0090】
【図1】本発明の実施例1について、GPS電波遮断物体検出システムの構造を示し、(a)が検出システムの斜視図、(b)が判定装置の機能ブロック図である。
【図2】(a)が選別用囲繞壁イメージの斜視図、(b)が設置箇所の背面図、(c)が設置箇所の側面図である。
【図3】本発明の実施例2について、GPS電波遮断物体検出システムの特徴部の構造を示し、(a)が方位仰角設定手段の機能ブロック図、(b)が設置箇所の背面図である。
【図4】本発明の実施例3について、GPS電波遮断物体検出システムの特徴部の構造を示し、(a)が方位仰角設定手段の機能ブロック図、(b)が設置箇所の背面図である。
【図5】本発明の実施例4について、GPS電波遮断物体検出システムの特徴部の構造を示し、(a)が方位仰角設定手段の機能ブロック図、(b)が設置箇所の背面図である。
【図6】本発明の課題を示し、(a)がGPS電波遮断物体検出システムの設置箇所の斜視図、(b)が設置箇所の背面図である。
【符号の説明】
【0091】
10…列車検知システム(GPS電波遮断物体検出システム)、
11…GPSアンテナ(GPS地上装置)、
12…GPS受信機(GPS地上装置)、13…判定装置、
13a…出力リレー、13b…方位設定ルーチン、
13c…選別ルーチン、13d…リングバッファ、
13e…列車存否判定ルーチン、13f…リレー制御ルーチン、
14…レール(軌道,移動経路)、14a…レール(隣接)、
15…列車(検出対象物)、15a…列車(検出対象外)、
16…GPS衛星、17…GPS電波、
23,24,25…方位仰角設定ルーチン
【技術分野】
【0001】
この発明は、鉄道用車両や自動車などの金属物体その他のGPS電波遮断物体を検出対象物としてその存否を検出するGPS電波遮断物体検出システムに関し、詳しくは、衛星航法システム(Global Positioning System)用のGPS(Global Positioning Satellite)衛星から送られてくるGPS電波を利用してGPS電波遮断物体の検出を行うGPS電波遮断物体検出システムに関する。
【背景技術】
【0002】
鉄道用車両を含めた金属物体などを検出する方式として、鉄道用車両では車両の車軸にて左右のレールを短絡することによりその存在を検出する軌道回路方式が広く採用されている(例えば特許文献1参照)。その他、金属物体が存在することにより発信周波数が変化することを利用したループコイル方式(例えば特許文献2参照)、発光器から受光器に送られた光が遮光性物体により遮断されることにより物体の存在を検出するフォトインタラプタ方式などが実用化されている。
また、GPSを利用した検出システムとして、GPSアンテナとGPS受信機を路面電車等の移動体に搭載して運行位置を検出するものや(例えば特許文献3参照)、GPSアンテナ等を地上に固定しておいて地殻変動を測定するものなどが挙げられる。
【0003】
【特許文献1】特開2000−168554号公報
【特許文献2】特開2005−238883号公報
【特許文献3】特開2006−240478号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
[特許文献4] 特願2007−192333号
[特許文献5] 特願2007−202414号
【0005】
このようなGPS利用の検出システムでは、無料で受信できるGPS電波を利用するため、送信機を自前で備える必要がないので、その分だけ原価を削減することができる。
また、複数のGPS衛星からの電波を受信できるうえ、それぞれの電波には時刻情報や位置情報などの複数の情報が含まれているため、使用態様により、物体存知検出の判定要件としてこれらを選択することにより物体検出の精度・確度、応動時間を指定することができる。
しかしながら、従来のGPS利用システムでは、位置は測定するが、物体の有無を検出するようにはなっていなかった。
【0006】
一方、GPSを利用していない従来の物体検出システムでは、電波等を送信しながら、それを受信できるか否かを検出するようになっている。このため、検出対象物による送信信号の遮断の有無に応じて物体の存否を判別することができる。
しかしながら、受信機だけでなく送信機も自前で備えなければならないので、その分だけ原価が嵩むこととなる。また、検出を確実に行うためには、送受信する電波等にID(識別符号)を付加する、あるいは変調を施すなどにより、電波等をユニークにし正規な電波等と雑音とを弁別する手段が必要である。
そこで、鉄道用車両や自動車などの金属物体がGPS電波を遮断するものであることに着目して、GPSを利用することにより金属その他のGPS電波遮断物体を検出するGPS電波遮断物体検出システムを簡便かつ低廉に実現することが望まれることとなる。
【0007】
そして、その要望に応えるべく、鉄道用車両や自動車などの金属物体を検出対象物としてその存否を検出する金属物体検出システムであって、衛星航法システム用のGPS衛星から送られてくるGPS電波を利用して検出対象物が存在するか否かを検出する金属物体検出システムが提案されている(特許文献4参照)。
また、そのような検出システムを鉄道信号に適用する場合、鉄道信号の運転保安設備には鉄道輸送の安全を確保するためにフェールセーフ性が要求されるので、鉄道信号や同等の安全性を要する分野でも使用できるよう、フェールセーフ性を具備させたGPS電波遮断物体検出システムも提案されている(特許文献5参照)。
【0008】
ところで、GPS電波遮断物体検出システムでは、GPSアンテナ設置先に天空を遮る建造物が存在すると、建造物の向こうのGPS衛星は、GPS電波遮断物体の検出に利用できない。また、鉄道用車両や自動車といった移動体については、GPS電波遮断物体検出システムのGPSアンテナが設置されていて検出対象車両の走行する線路や車線と他の線路や車線とが隣接していると、そこを走行する他の車両や自動車が、GPSアンテナの近くを走行する場合がある。そして、検出対象でない車両や自動車が隣接の移動経路を走行すると、その他車によって検出対象の移動経路でも不所望にGPS電波が遮断されることがあり、その場合、GPS電波遮断物体の不適切な検出が行われることとなる。
【0009】
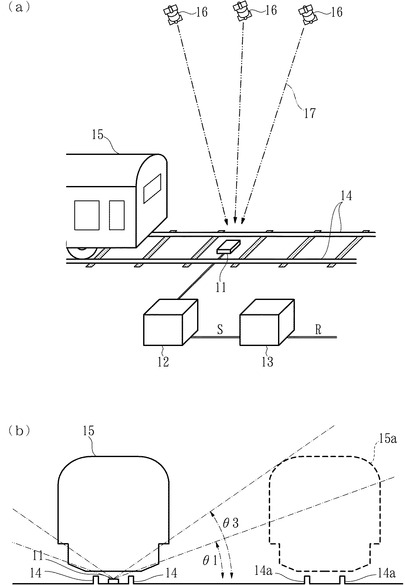
この場合を具体例で詳述する。図6は、GPSアンテナ11とGPS受信機12と判定装置13とを具えた列車検知システムの設置箇所を示し、(a)が斜視図、(b)が背面図である。なお、列車検知システムは鉄道用車両検知システムが適当であるが、慣例に従い、以下、鉄道用車両検知システムを列車検知システムと呼ぶ。また、この呼称をシステムに用いるときには鉄道用車両を列車と呼ぶ。
レール14(軌道,移動経路)を走行する列車15(金属物体,移動体,GPS電波遮断物体)を検出するために列車検知システムを設置する際、GPSアンテナ11は列車15が上方を通過するレール14,14の間(軌道上,移動経路上)に電波受信方向上向きで設置されるが、GPS受信機12と判定装置13は特別な制約が無いので保守作業等の容易な軌道脇などに設置される(図6(a)参照)。
【0010】
設置したGPSアンテナ11には上空のGPS衛星16からGPS電波17が飛来し、それを遮るものが無ければGPS電波17がGPSアンテナ11によって受信される。
そして、列車検知システムが異常なく稼動すると、列車15が進入して来るまでは、GPS電波17がGPSアンテナ11に到達するので、GPS受信機12の出力Sに基づき、GPS電波17の受信成功に対応して、判定装置13によって「列車なし」の判定が下され、それに対応したリレー制御Rが出される。
【0011】
これに対し、列車15の到来時には、GPS電波17が列車15によって遮られてGPSアンテナ11に到達しなくなるので、GPS受信機12の出力Sに基づき、GPS電波17の受信失敗に対応して、判定装置13から「列車あり」の判定が下され、それに対応したリレー制御Rが出される。さらに、列車15が走り去った時には、再びアンテナ11にGPS電波17が到達するので、その受信成功に対応して判定装置13から「列車なし」の判定が下され、それに対応したリレー制御Rが出される。
こうして、この列車検知システムにあっては、検出対象の列車15以外にGPS電波17を遮るものが無ければ、列車15(移動体)の去来が随時的確に検出される。
【0012】
しかしながら(図6(b)参照)、隣接するレール14a,14a上を検出対象外の列車15aが走行すると、その頭部をGPSアンテナ11から見たときの仰角が例えば30〜35゜といった大角度θ3になる。この大角度θ3は、一般に環境の影響を受けやすいので使用対象から外される低空のGPS衛星16の仰角である15〜20゜程度の小角度θ1より、かなり大きい。そのため、検出対象でない列車15aが隣接の軌道14a,14aを走行すると、その列車15aによって検出対象の軌道14,14のGPSアンテナ11でも不所望にGPS電波17が遮断されることがあり、その場合、列車15が来ていないにもかかわらず列車検知システムによって列車15が到来したとの誤検出が行われることとなる。
【0013】
このような不都合を回避・防止するには、天空高いGPS衛星のみ具体的には大角度θ3より仰角の大きいGPS衛星のみを物体の検出に利用すれば良い。
しかしながら、利用するGPS衛星を限定するに際してGPS衛星の仰角が一定の閾値を上回るか下回るかということで一律に選別したのでは、その閾値が大きいと、GPS衛星の航行状況によっては利用できるGPS衛星の数が不足することにもなりかねないため、精度・確度の高いGPS電波遮断物体検出システムを構築することができない。
【0014】
もっとも、GPS電波遮断物体検出システム設置先が鉄道用車両や自動車の移動経路の場合、隣接経路を他車が走行や駐車する側面方向(横方向)のGPS衛星については、仰角の大きい衛星に限定して利用しなければならないが、GPSアンテナの臨む自経路は走行方向の前方や後方には天空が仰角の小さいところまで開けているのが一般的である。
そこで、このようなアプリケーションの特質をGPS衛星の選別基準に反映させることにより、建築物などの電波障害物の近くにGPSアンテナを設置したり、他の移動経路の隣接している移動経路に臨ませてGPSアンテナを設置しても、GPS電波遮断物体が高い精度・確度で検出されるよう、GPS電波遮断物体検出システムを改良することが技術的な課題となる。
【課題を解決するための手段】
【0015】
本発明のGPS電波遮断物体検出システムは(解決手段1)、このような課題を解決するために創案されたものであり、GPS電波を受信するためのGPSアンテナと、このアンテナを介して得たGPS信号を処理して測位結果を出力するGPS受信機と、この受信機の出力に基づいて電波受信の成否を判別したうえで電波受信成功時にはGPS電波遮断物体が存在していないと判断し電波受信失敗時にはGPS電波遮断物体が存在していると判断する判定装置とを備えているGPS電波遮断物体検出システムであって、GPS電波遮断物体の検出に使用されるGPS衛星が存在する天空上のゾーンを方位毎の仰角指定にて規定する選別用データを保持する記憶手段と、GPS電波遮断物体の検出に使用するGPS衛星をその方位および仰角と前記選別用データの方位および仰角との比較に応じて選別する選別手段とを備えたことを特徴とする。
【0016】
なお、GPSアンテナとGPS受信機と判定装置は個別実装されていても良く一体的に実装されていても良い。
また、GPS電波遮断物体は、金属物体が典型的であるが、純金属に限られる訳でなく、GPS電波を遮断しうる物であれば、金属に他の材質のものが組み合わさっていても良く、混じっていても良く、非金属からなるものであっても良い。GPS電波遮断物体の典型例としては列車や自動車が挙げられる。
【0017】
また、本発明のGPS電波遮断物体検出システムは(解決手段2)、上記解決手段1のGPS電波遮断物体検出システムであって、GPS電波遮断物体の検出に使用するGPS衛星をGPS衛星が存在する方位角及び仰角で規定される天空上のゾーンを検出物体の周囲方位毎に指定し選択する際に、各ゾーンを仰角により細分化し指定し選択できるようになっている、ことを特徴とする。
【0018】
さらに、本発明のGPS電波遮断物体検出システムは(解決手段3)、上記解決手段1,2のGPS電波遮断物体検出システムであって、GPS衛星からの電波の強度を指定する強度閾値が前記選別用データに含まれており、前記選別手段が、GPS電波遮断物体の検出に使用するGPS衛星をその受信レベルと前記強度閾値との比較に応じて選別するようになっている、ことを特徴とする。
【0019】
また、本発明のGPS電波遮断物体検出システムは(解決手段4)、上記解決手段1〜3のGPS電波遮断物体検出システムであって、GPS電波遮断物体の検出に使用するGPS衛星を、GPS衛星の電波がGPSアンテナの周囲の建造物や他のGPS電波遮断物体の影響を受けないゾーンにあるGPS衛星と、それらの影響を受けるゾーンにあるGPS衛星とに区分し、影響を受けないGPS衛星については、このうちのひとつの衛星の電波受信の成否によりGPS電波遮断物体の無し有り(存否)を判定し、一方建造物や他のGPS電波遮断物体の影響を受けるゾーンにあるGPS衛星については、複数のGPS衛星全ての電波受信の成否によりGPS電波遮断物体の存否を判定することを特徴とする。
【0020】
また、本発明のGPS電波遮断物体検出システムは(解決手段5)、上記解決手段1〜4のGPS電波遮断物体検出システムであって、GPS衛星の方位と仰角または方位と仰角と受信レベルの組データを一定期間に亘って保持するバッファ手段が設けられ、これを参照して一定期間に及ぶ安定状態の有無を検知ことにより、GPS電波遮断物体の検出に使用するGPS衛星を、一定期間に及んで方位と仰角または方位と仰角と受信レベルの安定していたものに絞り込むようになっている、ことを特徴とする。
【0021】
また、本発明のGPS電波遮断物体検出システムは(解決手段6)、上記解決手段1〜5のGPS電波遮断物体検出システムであって、前記GPSアンテナがGPS電波遮断物体の移動経路に臨んで設置されるものであり、前記移動経路に係る進行方向に基づいて前記選別用データのうち方位の部分を設定する方位設定手段が設けられている、ことを特徴とする。
【0022】
また、本発明のGPS電波遮断物体検出システムは(解決手段7)、上記解決手段6のGPS電波遮断物体検出システムであって、前記方位設定手段に加えて又は代えて、前記移動経路に隣接した他の移動経路である隣接経路が有るか無いかの情報に基づいて前記選別用データのうち仰角の部分を設定する仰角設定手段が設けられている、ことを特徴とする。
なお、方位設定手段に加えて仰角設定手段も設けた場合、両手段は、別モジュールで実装されても良く、一体化実装にて方位仰角設定手段になっていても良い。
【0023】
また、本発明のGPS電波遮断物体検出システムは(解決手段8)、上記解決手段7のGPS電波遮断物体検出システムであって、前記仰角設定手段が、前記移動経路の斜度に基づいて前記選別用データのうち前記隣接経路側の仰角の部分を加減するようになっている、ことを特徴とする。
【0024】
また、本発明のGPS電波遮断物体検出システムは(解決手段9)、上記解決手段7,8のGPS電波遮断物体検出システムであって、前記仰角設定手段が、前記隣接経路に係る走行スケジュールに基づいて前記選別用データのうち前記隣接経路側の仰角の部分を隣接経路有り時の設定値と隣接経路無し時の設定値との何れかに切り替えるようになっている、ことを特徴とする。
【発明の効果】
【0025】
このような本発明のGPS電波遮断物体検出システムにあっては(解決手段1)、GPSアンテナを検出対象のGPS電波遮断物体に搭載するのでなく、GPS電波遮断物体を検出したいところに向けてGPSアンテナを設置しておく。しかも、その設置に際し、GPS電波遮断物体が検出対象位置に存在していればそれによってGPSアンテナへのGPS電波が遮られるが、検出対象位置にGPS電波遮断物体が存在しなければGPS電波がGPSアンテナに到達するようにしておく。そうすると、そのGPSアンテナへのGPS電波の到達の有無に応じて判定装置の判定が行われ、GPS電波遮断物体の存否が検出される。このように、GPSアンテナを検出対象物から外しておいてGPS電波の受信の成否に応じてGPS電波遮断物体の無し有り(存否)が判るようにしたことにより、電波を送信する設備を自前で備えなくても物体の有無を検出することができるので、送信設備の不要な分だけ、構成が簡素化され、原価が削減される。
【0026】
GPS(全地球測位システム)は、それ用の人工衛星が発信する電波を利用し、受信機が存在する当該位置(緯度・経度・高度)を演算するシステムで、現在では携帯電話にも取り入れられているなど普及がめざましく価格も非常に安価である。本発明は、広く普及し安定したGPSを本来の測位ではなくGPS電波遮断物体の存在の検出システムに応用したものであり、人工衛星からのGPS電波がGPS電波遮断物体により遮断されたことを検知してその存否を検出することにより、従来の物体検出システムとGPS利用システムとの長所を併せ持つものとなっている。
【0027】
具体的には、GPSを利用しながらも、GPSアンテナやGPS受信機を検出対象物の外に設置できるので、設置や保守等が容易で、利便性にも優れる。
また、複数のGPS衛星からの電波を受信できるうえ、それぞれの電波には時刻情報や位置情報などユニークな情報が含まれているので、この内容を判定装置が判断することにより、GPS衛星からの正規な電波と雑音とを弁別することができる。
そのため、この発明によれば、先ず、GPS電波遮断物体検出システムを簡便かつ低廉に実現することができる。
【0028】
しかも、本発明にあっては、それに加えて、GPS電波遮断物体の検出に使用するGPS衛星を限定するようになっているが、その限定に際して、GPS衛星の仰角だけで一律に選別するのでなく、GPS電波遮断物体の検出に使用されるGPS衛星が存在する天空上のゾーンを方位毎の仰角指定にて木目細かく規定しておいて、GPS衛星の方位および仰角で選別するよう改良したことにより、天空の開けていない方位については仰角の大きいところに絞り込んでも、天空の開けている方位については仰角の小さいところまで緩めることが可能となる。
【0029】
そのため、不所望なGPS衛星の使用は避けつつも、必要な数のGPS衛星を確保することができる。
したがって、この発明によれば、建築物などの電波障害物の近くにGPSアンテナを設置したり、他の移動経路の隣接している移動経路に臨ませてGPSアンテナを設置しても、GPS電波遮断物体が高い精度・確度で検出されるようなGPS電波遮断物体検出システムを実現することができる。
【0030】
また、本発明のGPS電波遮断物体検出システムにあっては(解決手段2)、GPS電波遮断物体の検出に使用するGPS衛星をGPS衛星が存在する方位角及び仰角で規定される天空上のゾーンを検出物体の周囲方位毎に指定し選択する際に、各ゾーンを仰角により細分化し指定し選択できるようにしたことにより、GPS電波遮断物体の検出の精度・確度が更に高まる。
【0031】
さらに、本発明のGPS電波遮断物体検出システムにあっては(解決手段3)、方位および仰角での選別に加えて、GPS衛星の受信レベルと所定の強度閾値との比較に応じた選別も行われるようにしたことにより、検出の精度・確度の低下を招きやすい微弱なGPS電波しか届かないGPS衛星も使用対象から外されるので、GPS電波遮断物体がより高い精度・確度で検出されることとなる。
【0032】
また、本発明のGPS電波遮断物体検出システムにあっては(解決手段4)、GPS電波遮断物体の検出に使用するGPS衛星をGPSアンテナの周囲の建造物や他のGPS電波遮断物体の影響の有無により選別し、存否の判定をひとつのGPS衛星の電波受信の成否によるのか、複数のGPS衛星の論理積とし存否の判定の確度を向上させることができるようにしたことにより、GPS電波遮断物体の検出の精度・確度が更に高まる。
【0033】
重複も辞さずに詳述すると、GPS受信アンテナは、あらゆる方向から到来する電波を受信する構造・機能になっているので、受信機にはGPS衛星から直接到来する電波のほかに、周囲の建造物や付近を移動する他のGPS電波遮断物体に反射して到来する電波(マルチパス波)が到来する。GPSの測位システムにおいてはこのマルチパス波が測位の精度を下げる要因となるので、これを排除することが必要となる。仰角の低い衛星ほどマルチパス波が発生しやすいので、仰角の高い衛星のみを使用することによりマルチパス波による不都合を排除できる。しかし、仰角の大きい衛星のみを使用することは使用できる衛星数が少なくことになりGPS衛星の運行状況によってはGPS衛星がひとつも捕捉できない場合もありうる。
【0034】
GPS電波遮断物体の検出システムでは、GPS電波遮断物体が存在することによりGPS電波の強度が低下し、存在しなくなったときにGPS電波の強度が回復することを利用してGPS電波遮断物体の存否を検出するものでGPS電波の強度が重要であり、GPSの測位システムのようにGPS衛星から得られる到達時刻などマルチパス波によって直接影響を受ける要素は2次的である。
こうしたことから、GPS電波遮断物体の検出システムでは、仰角が低くマルチパス波が発生しやすい衛星も積極的に利用しようとするものである。しかしながら、仰角が低い衛星の電波は隣接して走行する他の車両や自動車の影響を受けやすく、マルチパス波が車両や自動車の床下に潜り込む可能性も大きい。そこで、仰角の小さい衛星を利用する場合には、複数の衛星の論理積をとるようにして、精度を確保するのである。
【0035】
また、本発明のGPS電波遮断物体検出システムにあっては(解決手段5)、GPS衛星の方位角および仰角(又は方位角と仰角と受信レベルと)を一定期間に亘って監視して、GPS電波遮断物体の検出に使用するGPS衛星を方位や仰角(又は更に受信レベルも)が一定期間に及んで安定していたものに絞り込むようにしたことにより、GPS衛星のゾーン出入時の揺らぎの不所望な影響を排除・抑制することができる。すなわち、GPS衛星が選択されたゾーン内に進入あるいはゾーンから進出するときに、ゾーン境界付近において衛星の方位角や仰角あるいは電波の強度がしばしば揺らぐが、その揺らぎに起因してGPS衛星が選択対象に該当したり、それから外れたりする、といった不所望な事態が生じるのを簡便かつ的確に防ぐことができる。
【0036】
また、本発明のGPS電波遮断物体検出システムにあっては(解決手段6)、移動経路に係る進行方向に基づいて選別用データのうち方位の部分が自動設定されるようにしたことにより、煩雑で間違いやすい多量のデータの設定作業を方位に関しては簡便かつ正確に済ませられることとなる。移動経路を走行する移動体を検出する場合、隣接経路を走行する移動体の影響を受ける右/左の側面は、天空高い(仰角が大きい)衛星に限定するのが良く、天空が開けている前方/後方は、多くの衛星(仰角が大きいところから小さいところまで)を選択して検知するのが良いので、ゾーン形状が或る程度は固定可能であるところ、移動経路の前後左右が場所によって変わるため、それに合わせてゾーンの規定値・設定値を調整しなければならないが、進行方向に基づいて方位の部分が自動設定されるので調整作業が簡便になる。
【0037】
また、本発明のGPS電波遮断物体検出システムにあっては(解決手段7)、隣接経路の有無に応じて仰角の部分が自動設定されるので、きめ細かい仰角設定を簡便に済ませることができる。
【0038】
また、本発明のGPS電波遮断物体検出システムにあっては(解決手段8)、移動経路の斜度に基づいて隣接経路側の仰角が自動で加減されるようにしたことにより、隣接経路からの影響がより的確に反映されることとなる。
【0039】
また、本発明のGPS電波遮断物体検出システムにあっては(解決手段9)、隣接経路に係る走行スケジュールに基づいて隣接経路側の仰角が隣接経路有り時の設定値と隣接経路無し時の設定値との何れかに自動で切り替わるようにしたことにより、隣接経路からの影響が一層的確に反映されることとなる。
【発明を実施するための最良の形態】
【0040】
このような本発明のGPS電波遮断物体検出システムについて、これを実施するための具体的な形態を、以下の実施例1〜4により説明する。
図1〜2に示した実施例1は、上述した解決手段1〜6(出願当初の請求項1〜6)を具現化したものであり、図3に示した実施例2は、上述した解決手段7(出願当初の請求項7)を具現化したものであり、図4に示した実施例3は、上述した解決手段8(出願当初の請求項8)を具現化したものであり、図5に示した実施例4は、上述した解決手段9(出願当初の請求項9)を具現化したものであり、何れも列車検知システムへの適用例である。
【実施例1】
【0041】
本発明のGPS電波遮断物体検出システムの実施例1である列車検知システム10について、その具体的な構成を、図面を引用して説明する。図1は、(a)が列車検知システム10の斜視図、(b)が判定装置13の機能ブロック図である。また、図2は、(a)が選別用囲繞壁イメージの斜視図、(b)が設置箇所の背面図、(c)が設置箇所の側面図である。
【0042】
この列車検知システム10は(図1(a)参照)、GPSアンテナ11とGPS受信機12と判定装置13とを具えている。判定装置13には、上位の駅装置や連動装置などへ検知結果を送出するための出力リレー13aが付設されている。
GPSアンテナ11は、GPS衛星から送られてくるGPS電波を受信できれば市販の汎用品で足り、実装形態もフィルム形やプレート形など任意である。
GPS受信機12は、同軸ケーブルやBNCコネクタ等でGPSアンテナ11と接続されており、GPSアンテナ11を介して得たGPS信号を処理して測位結果を出力するものであれば市販の汎用品で足りる。その出力Sには一般に時刻情報と位置情報とが含まれるが、電波の強度を示すGPS電波の受信レベルも数値で出力する受信機が使い易い。GPS受信機が存在する当該位置情報は、緯度・経度・高度の組データで出力され、また衛星の天空上の位置情報は方位角と仰角の組データで出力される。
【0043】
判定装置13は(図1(a)参照)、例えばマイクロプロセッサやデジタルシグナルプロセッサを主体とした論理演算ユニットであり、GPS受信機12の出力Sを随時入力し、その出力Sに基づいて電波受信の成否を判別して、その判別結果に応じて出力リレー13aを駆動するために、方位設定ルーチン13bと選別ルーチン13cと列車存否判定ルーチン13eとリレー制御ルーチン13fといったプログラムモジュールが不揮発性のプログラム用メモリにインストールされるとともに、不揮発性で書換可能なEEPROMや揮発性で書換可能なSRAMといった適宜なデータ用メモリからなる記憶手段には、リングバッファ13dと選別用データと進行方向とが保持されている。
【0044】
進行方向は、移動経路に係る進行方向であり、レール14,14からなる軌道に臨んでGPSアンテナ11が設置される列車検知システムにあっては、その軌道を走行する列車15が前進する方向であり、例えば北から時計回りに測った方位角で「30゜」などと表される。この進行方向の指定は、製造時や調整時にPROMの割当領域にROMライタ等で書き込んでも良く、現場で設置時にデータ送信を行ってSRAMの割当領域に設定させても良く、要するに、方位設定ルーチン13bが選別用データの自動設定に用いるときまでに進行方向の値の指定作業が済んでいれば良い。
【0045】
選別用データには強度閾値と選別用囲繞壁イメージデータとが含まれており、そのうち強度閾値は、GPS衛星16からの電波の強度を指定するものであり、例えば電磁波の減衰量を示す単位のデシベルを用いて「3dB」などと表される。この強度閾値は、設置先に依存しない定数で良いので、強度閾値の指定は、固定的な書き込みで足りる。
選別用囲繞壁イメージ(図2(a)参照)のデータは(図1(a)参照)、GPSアンテナ11設置先のレール14を走行する列車15を検出するのに使用されるGPS衛星16が存在する天空上のゾーンを規定するためのものであり、GPSアンテナ11設置先の上空の半球イメージを、方位毎の仰角で境界を指定することで、GPS衛星使用側の上空ゾーンと、地上寄りでGPS衛星不使用側の選別用囲繞壁イメージとに、分けている。
【0046】
具体的には、水平を基準にした仰角を右と後と左と前とについて規定した仰角データ列と、北を基準にした時計回りの方位角を右前と右後と左後と左前とについて規定した方位データ列と、前方を基準とした時計回りの角度で向きを右前と右後と左後と左前とについて規定した向きデータ列とが、確保されている。そのうち方位データ列と仰角データ列は使用側の上空ゾーンと不使用側の選別用囲繞壁イメージとの境界を規定するものであり、向きデータ列は方位データ列の自動設定に用いられるものであり、この向きデータ列には、例えば右前「30゜」,右後「150゜」,左後「210゜」,左前「330゜」といった値が予め固定的に設定されている。
【0047】
また、仰角データ列には、例えば右「35゜」,後「25゜」,左「35゜」,前「20゜」といった値がやはり予め固定的に設定されている。
仰角データ列における左右の「35゜」は、レール14に設置されたGPSアンテナ11からレール14a上の列車15aを見上げたときの仰角である大角度θ3の安全側の値である(図2(b)参照)。仰角データ列における前「20゜」は、一般に環境の影響を受けやすいので使用対象から外される低空のGPS衛星16の仰角である小角度θ1の安全側の値である(図2(c)参照)。仰角データ列における後「25゜」は、小角度θ1より少し大きい中角度θ2になっている。
【0048】
前後で角度の異なる理由は次のようなことからである。例えば、レール14を横断する踏切道があり、この踏切道に近接して列車進行方向前方にGPSアンテナ11を設置したとすると、踏切道を走行する自動車などによりGPS電波17が不所望に遮断されることがあるが、これを回避するために、GPSアンテナ11から自動車の頭上を見通せるよう、後方の中角度θ2を前方の小角度θ1より少し大きくしたのである。このように、仰角データ列、方位データ列は、GPSアンテナ11の設置箇所の周囲の環境により適宜設定される値である。また、この例では方位を前後、左右の4つ方向に規定したが、もっと細分化してもよく、(請求項2記載のように)仰角についても細分化してもよい。
【0049】
方位設定ルーチン13bは(図1(b)参照)、選別用データの進行方向の指定値に基づいて選別用データの方位データ列を自動設定するものであり、進行方向が指定済みであれば随時実行しても良いが、この例の場合、方位データ列が不揮発性メモリに保持されるのであれば現場設置や現場調整の後の初期化の一部として実行すれば足り、方位データ列が揮発性メモリに保持されるのであれば電源投入後やリセット後の初期化の一部として実行すれば足りる。そして、実行時には向きデータ列の各データ値に進行方向の値を加算してから360゜の剰余をとるものであり、上述した数値例を踏襲すると、方位データ列に右前「60゜」,右後「180゜」,左後「240゜」,左前「0゜」といった値を自動設定するようになっている。
【0050】
選別ルーチン13cは、レール14を走行する列車15の検出に使用するGPS衛星16を選別するものであり、GPS受信機12の出力Sにて受信成功の確認されたGPS衛星16を総て列車存否判定に使用するのでなく、GPS受信機12の出力Sから直に得られた又は適宜な演算を施して得たGPS衛星16の方位と仰角と受信レベルとをそれぞれ選別用データの方位と仰角と強度閾値と比較し、その比較結果に応じて限定するようになっている。その内容は、GPS衛星16の受信レベルが十分に強く且つGPS衛星16の方位角および仰角による天空位置が使用側の上空ゾーンに入っているものに限って使用し、辛うじて受信に成功しても受信レベルの弱いGPS衛星16や選別用囲繞壁イメージの先のGPS衛星16は受信に失敗したと擬制して検出に使用しないというものである。
【0051】
具体的には、GPS衛星16の受信レベルの値が選別用データの強度閾値を上回っており、GPS衛星16の方位値が右側を示しているとき即ちその方位値が選別用データの方位データ列における右前から右後までの範囲に入っているならばGPS衛星16の仰角値が選別用データの仰角データ列における右の値を上回っており、GPS衛星16の方位値が後側を示しているとき即ちその方位値が選別用データの方位データ列における右後から左後までの範囲に入っているならばGPS衛星16の仰角値が選別用データの仰角データ列における後の値を上回っている、という限定条件が課される。
【0052】
さらに、GPS衛星16の方位値が左側を示しているとき即ちその方位値が選別用データの方位データ列における左後から左前までの範囲に入っているならばGPS衛星16の仰角値が選別用データの仰角データ列における左の値を上回っており、GPS衛星16の方位値が前側を示しているとき即ちその方位値が選別用データの方位データ列における左前から右前までの範囲に入っているならばGPS衛星16の仰角値が選別用データの仰角データ列における前の値を上回っている、という限定条件が課される。そして、これらの限定条件をクリアしたGPS衛星16についてだけ、その方位と仰角と受信レベルの組データをリングバッファ13dに書き込むようになっている。
【0053】
リングバッファ13dは、例えば配列領域とポインタとで構成される先入れ先出し方式のFIFOキューであり、方位と仰角と受信レベルの組データ(S)を一定期間に亘って保持するバッファ手段として機能するために、方位と仰角と受信レベルの組データ(S)が新たに書き込まれると一定数までは増長して蓄積量を増すが一定数に達すると最も旧い組データ(S)を消去して蓄積量を一定に維持するようになっている。また、リングバッファ13dに蓄積された方位と仰角と受信レベルの組データ群(SS)は、時系列に並んでおり、総てが列車存否判定ルーチン13eから参照可能になっている。
【0054】
列車存否判定ルーチン13eは、GPS受信機12の出力Sを直に使用するのでなく上記リングバッファ13dの組データ群(SS)を参照することにより、GPS受信機12の出力Sに基づく電波受信の成否判別ひいては列車15の存否判定を行うものであるが、リングバッファ13dを参照したときに、各GPS衛星16について方位と仰角と受信レベルとが一定期間に及んで安定していると言える状態に有るのか無いのかを検知し、その結果に応じた更なる選別を行うことで、列車15の検出に使用するGPS衛星16を、一定期間に及んで方位および仰角の安定していたものに絞り込むようになっている。
【0055】
一定期間に及んで安定していると言える基準としては、それぞれのGPS衛星16について、例えば、一定期間に亘る総てのサンプリングタイミングで電波受信に成功して一連の方位と仰角と受信レベルの組データ(S)が組データ群(SS)に含まれていることや、80%以上のサンプリングタイミングで電波受信に成功していること、電波受信の成功と失敗との遷移が所定回数を超えないこと、等が挙げられる。
電波受信の成功と失敗との遷移の基準として更なる擬制も採用されており、このルーチン13eは、成功時の受信レベルに比べて受信レベルが例えば半減したときには電波受信が成功から失敗へ遷移したと擬制し、失敗を擬制した受信レベルから受信レベルが例えば倍増したときには電波受信が失敗から成功へ遷移したと擬制するようになっている。
【0056】
列車存否判定ルーチン13eは、それらの基準に基づいてGPS衛星16からの電波受信の有無を切り分けて、電波受信成功時には「列車なし」(GPS電波遮断物体が存在していない)と判断し、電波受信失敗時には「列車あり」(GPS電波遮断物体が存在している)と判断して、その判断結果をリレー制御ルーチン13fに引き渡すようになっている。
さらに、列車存否判定ルーチン13eは、GPS衛星16が複数台存在するうえ夫々のGPS電波17に時刻情報や位置情報が含まれているのを利用した次の機能拡張がなされている。
【0057】
すなわち、列車15(移動体,GPS電波遮断物体)を検出対象とする鉄道の列車検知システム10では、安全確保のために列車が存在することを優先して検出したいので、列車存否判定ルーチン13eの判定処理では、受信していた複数個たとえば3個のGPS衛星からのGPS電波のうち1個でも途絶えた場合には「列車あり」(列車が存在する)と判断し、逆に3個全てからGPS電波の受信があり、かつそこに含まれる時刻情報や位置情報がGPS運行スケジュールに照らして適正であるかどうかを判断し、これも正当な場合に限って「列車なし」(列車が存在しない)と判断するようになっている。
【0058】
リレー制御ルーチン13fは(図1(b)参照)、列車存否判定ルーチン13eの判定結果に応じてリレー制御Rを生成するものであり、「列車なし」のときにはリレー制御Rを励磁状態にし、「列車あり」のときにはリレー制御Rを無励磁状態にするようになっている。
出力リレー13aは(図1(a)参照)、判定装置13により制御され、判定装置13からのリレー制御Rによって励磁されたり励磁されなかったりするものであり、励磁状態が「列車なし」すなわち「GPS電波遮断物体が存在しない状態」に対応し、無励磁状態が「列車あり」すなわち「GPS電波遮断物体が存在する状態」に対応している。
【0059】
この実施例1の列車検知システム10システムについて、その使用態様及び動作を、図面を引用して説明する。図2は、(a)が選別用囲繞壁イメージの斜視図、(b)が設置箇所の背面図、(c)が設置箇所の側面図である。
【0060】
レール14(軌道,移動経路)を走行する列車15(金属物体,移動体,GPS電波遮断物体)を検出するために列車検知システム10を設置する際、GPSアンテナ11は列車15が上方を通過するレール14,14の間(軌道上,移動経路上)に電波受信方向上向きで設置されるが、GPS受信機12と判定装置13は特別な制約が無いので保守作業等の容易なところに設置して良い。設置したGPSアンテナ11には上空のGPS衛星16からGPS電波17が飛来し、それを遮るものが無ければ、GPS電波17がGPSアンテナ11によって受信される。
【0061】
また、システム設置時かそれ以前に、GPSアンテナ11の設置先でレール14上を走行する列車15の前進方向を、判定装置13の選別用データの進行方向に、上述した何れかの手法で、設定しておく。
そして、列車検知システム10が稼動すると、判定装置13では、初期化のため最初だけ方位設定ルーチン13bが起動されて、選別用データについて、進行方向と向きデータ列とに基づいて方位データ列に右前「60゜」,右後「180゜」,左後「240゜」,左前「0゜」といった値が自動設定される。なお、選別用データの仰角データ列には右「35゜」,後「25゜」,左「35゜」,前「20゜」といった値が予め設定されており、選別用データの強度閾値には3dBといった値がやはり予め設定されている。
【0062】
初期化が済んで定常状態に移行すると、判定装置13では選別ルーチン13cと列車存否判定ルーチン13eとリレー制御ルーチン13fが並行して又は所定周期の順次繰り返し等で実行される。
そして、列車15が進入して来るまでは、幾つかのGPS衛星16からGPS電波17がGPSアンテナ11に到達し、それらのGPS衛星16の情報がGPS受信機12の出力Sに含められて判定装置13に入力され選別ルーチン13cに引き渡される。選別ルーチン13cでは GPS受信機12の出力Sから得た幾つかのGPS衛星16の方位と仰角と受信レベルと、選別用データの方位と仰角と強度閾値とが、それぞれ比較され、その比較結果に応じて限定がなされる。
【0063】
そのため、GPS衛星16の受信レベルが十分に強く且つGPS衛星16の天空位置が使用側の上空ゾーンに入っているものに限って、そのGPS衛星16に係る方位と仰角と受信レベルの組データ(S)がリングバッファ13dに蓄積される。
そのリングバッファ13dに蓄積された方位と仰角と受信レベルの組データ群(SS)が列車存否判定ルーチン13eによって参照されて、列車15の存否判定に使用されるGPS衛星16が、一定期間たとえば4秒(実測による経験値)に及んで方位と仰角と受信レベルの安定していたものに更に絞り込まれる。
【0064】
こうして限定されたGPS衛星16の情報に基づき、判定装置13では、GPS電波17の受信成功に対応して、列車存否判定ルーチン13eによって「列車なし」の判定が下され、それに対応したリレー制御Rがリレー制御ルーチン13fによって出される。
これに対し、列車15の到来時には、GPS電波17が列車15によって遮られてGPSアンテナ11に到達しなくなるので、GPS受信機12の出力Sに基づき、GPS電波17の受信失敗に対応して、判定装置13から「列車あり」の判定が下され、それに対応したリレー制御Rが出される。ただし、この判定に際しても、GPS受信機12の出力Sの方位と仰角と受信レベルがそのまま使用されるのでなく、上述の選択にて限定された方位と仰角と受信レベルが使用される。
【0065】
さらに、列車15が走り去った時には、再びアンテナ11にGPS電波17が到達するので、その受信成功に対応して判定装置13から「列車なし」の判定が下され、それに対応したリレー制御Rが出される。このときも、判定には、GPS受信機12の出力Sそのままでなく、上述の選択にて限定された方位と仰角と受信レベルが使用される。
こうして、この列車検知システム10でも、課題の欄において既述した図6(a)の列車検知システムと同様、検出対象の列車15以外にGPS電波17を遮るものが無ければ、列車15(移動体)の去来が随時的確に検出される。
【0066】
しかも、この列車検知システム10にあっては、課題の欄において既述した図6(a)の列車検知システムと異なり、左右の側方(横方向)には仰角が大角度θ3を上回る上空ゾーンのGPS衛星16に限って列車存否判定に使用しているので(図2(b)参照)、検出対象でない隣のレール14aを他の列車15aが走行しても、その影響を受けることがない。一方、視界の開けている前方や後方については仰角が小角度θ1や中角度θ2を上回っているGPS衛星16が列車存否判定に使用されるので、使用可能なGPS衛星16が1個や2個まで減ってしまうこともない。
【0067】
それに加え、この列車検知システム10にあっては、列車存否判定に使用するGPS衛星16の限定について、受信レベルが強度閾値を超えるGPS衛星16に限定するとともに、方位と仰角と受信レベルとが一定時間に及んで安定しているGPS衛星16に限定することも行われるので、検出対象のレール14上を走行する列車15の去来が高い精度・確度で検出されるのである。
【実施例2】
【0068】
本発明のGPS電波遮断物体検出システムの実施例2について、それを具体化した列車検知システムの構成を、図面を引用して説明する。図3は、(a)が方位仰角設定ルーチン23のブロック図、(b)が設置箇所の背面図である。
この列車検知システムが上述した実施例1のものと相違するのは方位設定ルーチン13bが機能拡張されて方位仰角設定ルーチン23になった点と、選別用データに右隣接経路フラグと左隣接経路フラグとが追加されている点である。
【0069】
右隣接経路フラグには、検出対象の軌道14,14の右側に検出対象外の隣接軌道(隣接経路)が有るのか無いのかが設定され、左隣接経路フラグには、検出対象の軌道14,14の左側に検出対象外の隣接軌道が有るのか無いのかが設定される。その設定は上述した進行方向の設定と同様にしてなされるようになっている。
方位仰角設定ルーチン23は、上述した方位データ列の自動設定に加え、検出対象外の隣接軌道が有るか無いかの情報を保持する右隣接経路フラグと左隣接経路フラグとを参照し、その情報に基づいて選別用データのうち仰角の部分を自動設定する。
【0070】
具体的には、右隣接経路フラグが「有」のときには仰角データ列における右のところに大角度θ3「35゜」を設定し、右隣接経路フラグが「無」のときには仰角データ列における右のところに中角度θ2「25゜」を設定し、左隣接経路フラグが「有」のときには仰角データ列における左のところに大角度θ3「35゜」を設定し、左隣接経路フラグが「無」のときには仰角データ列における左のところに中角度θ2「25゜」を設定するようになっている。
【0071】
この場合、設置先であって検出対象になっているレール14,14(軌道)の右側にだけ検出対象外のレール14a,14a(隣接軌道)が存在しているものとして、装置稼動までに予め、右隣接経路フラグを「有」に設定し、左隣接経路フラグを「無」に設定しておく。そうすると、初期化時に自動で、選別用データの仰角データ列における右のところには大角度θ3「35゜」が設定され、その仰角データ列における左のところには中角度θ2「25゜」が設定される。
これにより、列車存否判定に使用されるGPS衛星16が入っている上空ゾーンが、隣接軌道の無い左側については後方と同様に下方へ広げられる。
【0072】
そして、初期化が済んで定常状態に移行してからは、上例と同様にして列車15の去来が検出されるが、選別用データの仰角データ列の設定が隣接軌道の有無に対応してきめ細かくなされていて、他の列車の不所望な影響を受けることなく使用側の上空ゾーンが広がっているので、列車存否判定に有効に使用できるGPS衛星16の数が増えるため、検出対象外のレール14a,14aが右側に存在しているレール14,14に臨ませてGPSアンテナ11を設置しても、レール14,14上を走行する列車15を高い精度・確度で検出することができる。
【実施例3】
【0073】
本発明のGPS電波遮断物体検出システムの実施例2について、それを具体化した列車検知システムの構成を、図面を引用して説明する。図4は、(a)が方位仰角設定ルーチン24のブロック図、(b)が設置箇所の背面図である。
この列車検知システムが上述した実施例2のものと相違するのは方位設定ルーチン23が機能拡張されて方位仰角設定ルーチン24になった点と、選別用データに斜度θxのデータ領域が追加されている点である。
【0074】
斜度θxには、検出対象の軌道14,14の横方向における水平からの傾斜角度が設定される。斜度θxの指定値は設置現場で実測され、その設定は上述した進行方向や隣接経路の設定と同様にしてなされるようになっている。
方位仰角設定ルーチン24は、上述した方位データ列や仰角データ列の自動設定に加え、検出対象の軌道14,14(移動経路)の斜度θxに基づいて選別用データのうち仰角データ列における左右のところの仰角値を自動で加減するようになっている。なお、その加減は、斜度θxが正負の値をとるときには加算演算だけで具現化され、斜度θxが正の値だけの場合、上側は加算で、下側は減算で、具現化される。
【0075】
具体的には、右隣接経路フラグが「有」のときには仰角データ列における右のところに斜度θxの値を加減し、左隣接経路フラグが「有」のときには仰角データ列における左のところに斜度θxの値を加減する。ただし、何れの場合も、その加減によって中角度θ2を下回るときには中角度θ2を下限として中角度θ2を設定する。また、隣接経路フラグが「無」のときでも、左右のうち斜め上の方には、小角度θ1に斜度θxを加えたものと中角度θ2とのうち大きい方の値を設定するようになっている。
【0076】
この場合、設置先であって検出対象になっているレール14,14(軌道)の右側にだけ検出対象外のレール14a,14a(隣接軌道)が存在しているうえ、レール14a側を斜め上にして斜度θxだけ軌道面が傾斜しているものとして、装置稼動までに予め、右隣接経路フラグを「有」に設定し、左隣接経路フラグを「無」に設定し、現場で計測した軌道14,14の傾斜角度たとえば「10゜」を斜度θxに設定しておく。そうすると、初期化時に自動で、選別用データの仰角データ列における右のところには大角度θ3「35゜」が設定され、その仰角データ列における左のところには中角度θ2「25゜」が設定され、さらに、その後、選別用データの仰角データ列における右のところだけ斜度θxを加えられて「45゜」に修正される。
【0077】
これにより、列車存否判定に使用されるGPS衛星16が入っている上空ゾーンが隣接軌道の無い左側については過剰になるのを避けつつ下方へ広げられるとともに、隣接軌道の有る右側については、軌道の傾斜によって検出対象外のレール14a上の列車15aの頭部の見掛けの高さが増した分だけ、使用側の上空ゾーンが上方へ狭められる。
そして、初期化が済んで定常状態に移行してからは、上例と同様にして列車15の去来が検出されるが、この場合も、その検出が高い精度・確度でなされる。
【0078】
すなわち、選別用データの仰角データ列の設定が隣接軌道の有無や軌道の傾斜に対応してきめ細かくなされていて、他の列車の不所望な影響を受けることなく使用側の上空ゾーンが広がっているうえ、軌道の傾斜の不所望な影響も受けないよう上空ゾーンに更なる微調整も施されているので、列車存否判定に有効に使用できるGPS衛星16の数が増えるため、検出対象外のレール14a,14aが右側に存在しているばかりか横方向に傾いているレール14,14に臨ませてGPSアンテナ11を設置しても、レール14,14上を走行する列車15を高い精度・確度で検出することができる。
【実施例4】
【0079】
本発明のGPS電波遮断物体検出システムの実施例4について、それを具体化した列車検知システムの構成を、図面を引用して説明する。図5は、(a)が方位仰角設定ルーチン25のブロック図、(b)が設置箇所の背面図である。
この列車検知システムが上述した実施例3のものと相違するのは方位設定ルーチン24が機能拡張されて方位仰角設定ルーチン25になった点と、選別用データに走行スケジュールのデータ保持領域が追加されている点である。
【0080】
走行スケジュールは、検出対象外の隣接軌道(レール14a,14a)に係る列車15aの走行スケジュールであり、検出対象の軌道(レール14,14)に臨むGPSアンテナ11の設置箇所の隣を通過する各時刻を保持している。右隣接経路フラグも左隣接経路フラグも「無」のときには走行スケジュールの設定が要らないが、右隣接経路フラグが「有」のときには右側の隣接軌道に係る走行スケジュールを設定し、左隣接経路フラグが「有」のときには左側の隣接軌道に係る走行スケジュールを設定し、両フラグが「有」なら走行スケジュールを二つ設定するようになっている。それらの設定は、上述した進行方向等の設定と同様にしても良いが、走行スケジュールは予定時刻の変更が避けられないので、図示しない集中監視装置などから通信にて随時ダウンロードするのが望ましい。
【0081】
方位仰角設定ルーチン25は、初期化時に上述の方位データ列や仰角データ列の自動設定を行うのに加えて、装置稼動中に随時、隣接軌道に係る走行スケジュールに基づいて選別用データのうち選別用データのうち仰角データ列における隣接軌道側の仰角値を隣接軌道有り時の設定値と隣接軌道無し時の設定値との何れかに自動で切り替えるようになっている。また、実運行の変動を考慮して走行スケジュールでの規定時刻の前後に幅を持たせた時間帯において隣接軌道有り時の設定値を設定するようにもなっている。
【0082】
具体的には、走行スケジュールでの規定時刻の例えば5分前に仰角データ列における隣接軌道側の仰角値を隣接軌道有り時の設定値で上書きし、走行スケジュールでの規定時刻の例えば10分後に、走行スケジュールで以後の規定時刻を調べて5分後以内に迫っているものが無ければ、仰角データ列における隣接軌道側の仰角値を隣接軌道無し時の設定値に戻すようになっている。なお、上述したように、隣接軌道有り時の設定値は[大角度θ3+斜度θx]と[中角度θ2]とのうち大きい方であり、隣接軌道無し時の設定値は[小角度θ1+斜度θx]と[中角度θ2]とのうち大きい方である。
【0083】
この場合、設置先であって検出対象になっているレール14,14(軌道)の右側にだけ検出対象外のレール14a,14a(隣接軌道)が存在しているうえ、レール14a側を斜め上にして斜度θxだけ軌道面が傾斜しているものとして、装置稼動までに予め、右隣接経路フラグを「有」に設定し、左隣接経路フラグを「無」に設定し、現場で計測した軌道14,14の傾斜角度たとえば「10゜」を斜度θxに設定しておく。そうすると、初期化時に自動で、選別用データの仰角データ列における右のところには大角度θ3「35゜」が設定され、その仰角データ列における左のところには中角度θ2「25゜」が設定され、さらに、その後、選別用データの仰角データ列における右のところだけ斜度θxを加えられて「45゜」に修正される。また、仰角データ列における右について、隣接軌道有り時の設定値は[大角度θ3+斜度θx]の「45゜」になり、隣接軌道無し時の設定値は[小角度θ1+斜度θx]の「30゜」になる。
【0084】
さらに、走行スケジュールがダウンロードされると、初期でなくても方位仰角設定ルーチン25が起動されて、選別用データの仰角データ列における右のところについて再設定が行われる。すなわち、現在時刻と走行スケジュールの規定時刻とが比較されて、走行スケジュールの何れかの規定時刻の5分前から10分後までの間に現在時刻が入っているときには仰角データ列における右のところに「45゜」が設定され、そうでないときには「30゜」が設定される。方位仰角設定ルーチン25によるこの再設定処理は、定期的・周期的に、あるいは走行スケジュールに基づいて必要時に、繰り返し行われる。
【0085】
これにより、列車存否判定に使用されるGPS衛星16が入っている上空ゾーンが隣接軌道の無い左側については過剰になるのを避けつつ下方へ広げられるとともに、隣接軌道の有る右側については、軌道の傾斜によって検出対象外のレール14a上の列車15aの頭部の見掛けの高さが増した分だけ使用側の上空ゾーンが上方へ狭められるが、隣のレール14a上の列車15aによる不所望な影響を回避するための上空ゾーン限定は、隣のレール14a上に列車15aが来る可能性の高い時間帯だけ行われ、隣のレール14a上に列車15aが来ない時間帯には行われない。
このように、上空ゾーンの規定に際し、方位毎のきめ細かな調整に加えて、時間帯毎のきめ細かな調整も行われるので、列車15が高い精度・確度で検出される。
【0086】
[その他]
上記実施例で、方位設定ルーチンや方位仰角設定ルーチンによる選別用囲繞壁イメージは前後左右の方位に対して仰角を階段状に設定するようになっていたが、方位の設定は前後左右に限られるものでなく例えば45゜単位や10゜単位あるいはその組み合わせなどで細分化しても良く、仰角の設定は不連続な階段状に限らず例えば折れ線や曲線を表す関数などで連続的にしても良い。
また、上記実施例では、GPSアンテナ11が一軌道のレール14,14の間に設置されていたが、GPS電波17の遮断/非遮断が列車15の存否に応じてなされれば、GPSアンテナ11はレール14に臨む他所に設置しても良い(特許文献4,5参照)。
【0087】
さらに、上記実施例では、GPSアンテナとGPS受信機と判定装置とが別体になっていて有線接続されていたが、これらは実装に際して適宜一体化しても良く無線接続しても良い。例えば、GPSアンテナ及びGPS受信機としてGPS機能を備えた携帯電話を採用して、GPS電波遮断物体を検出したい位置に携帯電話を置き、その検出結果を携帯電話の通信機能により遠隔地の判定装置に通知するようにしても良い。
また、上記実施例では、方位設定ルーチン13bと選別ルーチン13cが判定装置13にインストールされていたが、これらのルーチン13b,13cは、判定装置13から抜き出して、GPS受信機12にインストールしても良く、GPS受信機12の出力Sの信号伝送ケーブル等に介挿接続される別体の論理演算装置やマイクロプロセッサシステム等に搭載しても良い。
【0088】
また、上記実施例では、フェールセーフについて言及していないが、列車検知システムにフェールセーフ性が要求される場合、判定装置にフェールセーフな装置を採用したうえで、GPSアンテナからGPS受信機を経て判定装置に至るGPS地上装置およびその伝送系の健全性をGPS受信機の出力に基づいて監視するよう判定装置を改造することにより、システム全体をフェールセーフなものにすることができる(特許文献5参照)。
また、地上側に設置するGPSアンテナの有効面積を変えることにより、あるいはGPSアンテナと検出対象物の最接近面との離隔距離を変えることにより、検出対象物体の大きさを変えることができる。
【産業上の利用可能性】
【0089】
本発明のGPS電波遮断物体検出システムは、金属物体等のGPS電波遮断物体をその外から検出することができるので、上記実施例で挙げた列車検出システムのように鉄道用車両が走行する軌道から鉄道用車両の進入進出を検出するのに好適なものであるが、その他の応用も可能である。例えば(特許文献4,5参照)、軌道脇から鉄道用車両の進入進出を検出することや、自動車が駐車する駐車場側から自動車の駐車発車を検出すること、貸し駐車場の出入り口で自動車の入出庫を検出すること、所定位置に置いた金属物体が継続設置されているか持ち去られたかを検出することなどにも、適用することができる。
【図面の簡単な説明】
【0090】
【図1】本発明の実施例1について、GPS電波遮断物体検出システムの構造を示し、(a)が検出システムの斜視図、(b)が判定装置の機能ブロック図である。
【図2】(a)が選別用囲繞壁イメージの斜視図、(b)が設置箇所の背面図、(c)が設置箇所の側面図である。
【図3】本発明の実施例2について、GPS電波遮断物体検出システムの特徴部の構造を示し、(a)が方位仰角設定手段の機能ブロック図、(b)が設置箇所の背面図である。
【図4】本発明の実施例3について、GPS電波遮断物体検出システムの特徴部の構造を示し、(a)が方位仰角設定手段の機能ブロック図、(b)が設置箇所の背面図である。
【図5】本発明の実施例4について、GPS電波遮断物体検出システムの特徴部の構造を示し、(a)が方位仰角設定手段の機能ブロック図、(b)が設置箇所の背面図である。
【図6】本発明の課題を示し、(a)がGPS電波遮断物体検出システムの設置箇所の斜視図、(b)が設置箇所の背面図である。
【符号の説明】
【0091】
10…列車検知システム(GPS電波遮断物体検出システム)、
11…GPSアンテナ(GPS地上装置)、
12…GPS受信機(GPS地上装置)、13…判定装置、
13a…出力リレー、13b…方位設定ルーチン、
13c…選別ルーチン、13d…リングバッファ、
13e…列車存否判定ルーチン、13f…リレー制御ルーチン、
14…レール(軌道,移動経路)、14a…レール(隣接)、
15…列車(検出対象物)、15a…列車(検出対象外)、
16…GPS衛星、17…GPS電波、
23,24,25…方位仰角設定ルーチン
【特許請求の範囲】
【請求項1】
GPS電波を受信するためのGPSアンテナと、このアンテナを介して得たGPS信号を処理して測位結果を出力するGPS受信機と、この受信機の出力に基づいて電波受信の成否を判別したうえで電波受信成功時にはGPS電波遮断物体が存在していないと判断し電波受信失敗時にはGPS電波遮断物体が存在していると判断する判定装置とを備えているGPS電波遮断物体検出システムであって、GPS電波遮断物体の検出に使用されるGPS衛星が存在する天空上のゾーンを方位毎の仰角指定にて規定する選別用データを保持する記憶手段と、GPS電波遮断物体の検出に使用するGPS衛星をその方位および仰角と前記選別用データの方位および仰角との比較に応じて選別する選別手段とを備えたことを特徴とするGPS電波遮断物体検出システム。
【請求項2】
GPS電波遮断物体の検出に使用するGPS衛星をGPS衛星が存在する方位角及び仰角で規定される天空上のゾーンを検出物体の周囲方位毎に指定し選択する際に、各ゾーンを仰角により細分化し指定し選択できるようになっている、ことを特徴とする請求項1記載のGPS電波遮断物体検出システム。
【請求項3】
GPS衛星からの電波の強度を指定する強度閾値が前記選別用データに含まれており、前記選別手段が、GPS電波遮断物体の検出に使用するGPS衛星をその受信レベルと前記強度閾値との比較に応じて選別するようになっている、ことを特徴とする請求項1又は請求項2に記載されたGPS電波遮断物体検出システム。
【請求項4】
GPS電波遮断物体の検出に使用するGPS衛星を、GPS衛星の電波がGPSアンテナの周囲の建造物や他のGPS電波遮断物体の影響を受けないゾーンにあるGPS衛星と、それらの影響を受けるゾーンにあるGPS衛星とに区分し、影響を受けないGPS衛星については、このうちのひとつの衛星の電波受信の成否によりGPS電波遮断物体が存否を判定し、一方建造物や他のGPS電波遮断物体の影響を受けるゾーンにあるGPS衛星については、複数のGPS衛星全ての電波受信の成否によりGPS電波遮断物体の存否を判定するようになっている、ことを特徴とする請求項1乃至請求項3の何れかに記載されたGPS電波遮断物体検出システム。
【請求項5】
GPS衛星の方位と仰角または方位と仰角と受信レベルの組データを一定期間に亘って保持するバッファ手段が設けられ、これを参照して一定期間に及ぶ安定状態の有無を検知ことにより、GPS電波遮断物体の検出に使用するGPS衛星を、一定期間に及んで方位と仰角または方位と仰角と受信レベルの安定していたものに絞り込むようになっている、ことを特徴とする請求項1乃至請求項4の何れかに記載されたGPS電波遮断物体検出システム。
【請求項6】
前記GPSアンテナがGPS電波遮断物体の移動経路に臨んで設置されるものであり、前記移動経路に係る進行方向に基づいて前記選別用データのうち方位の部分を設定する方位設定手段が設けられている、ことを特徴とする請求項1乃至請求項5の何れかに記載されたGPS電波遮断物体検出システム。
【請求項7】
前記方位設定手段に加えて又は代えて、前記移動経路に隣接した他の移動経路である隣接経路が有るか無いかの情報に基づいて前記選別用データのうち仰角の部分を設定する仰角設定手段が設けられている、ことを特徴とする請求項6記載のGPS電波遮断物体検出システム。
【請求項8】
前記仰角設定手段が、前記移動経路の斜度に基づいて前記選別用データのうち前記隣接経路側の仰角の部分を加減するようになっている、ことを特徴とする請求項7記載のGPS電波遮断物体検出システム。
【請求項9】
前記仰角設定手段が、前記隣接経路に係る走行スケジュールに基づいて前記選別用データのうち前記隣接経路側の仰角の部分を隣接経路有り時の設定値と隣接経路無し時の設定値との何れかに切り替えるようになっている、ことを特徴とする請求項7又は請求項8に記載されたGPS電波遮断物体検出システム。
【請求項1】
GPS電波を受信するためのGPSアンテナと、このアンテナを介して得たGPS信号を処理して測位結果を出力するGPS受信機と、この受信機の出力に基づいて電波受信の成否を判別したうえで電波受信成功時にはGPS電波遮断物体が存在していないと判断し電波受信失敗時にはGPS電波遮断物体が存在していると判断する判定装置とを備えているGPS電波遮断物体検出システムであって、GPS電波遮断物体の検出に使用されるGPS衛星が存在する天空上のゾーンを方位毎の仰角指定にて規定する選別用データを保持する記憶手段と、GPS電波遮断物体の検出に使用するGPS衛星をその方位および仰角と前記選別用データの方位および仰角との比較に応じて選別する選別手段とを備えたことを特徴とするGPS電波遮断物体検出システム。
【請求項2】
GPS電波遮断物体の検出に使用するGPS衛星をGPS衛星が存在する方位角及び仰角で規定される天空上のゾーンを検出物体の周囲方位毎に指定し選択する際に、各ゾーンを仰角により細分化し指定し選択できるようになっている、ことを特徴とする請求項1記載のGPS電波遮断物体検出システム。
【請求項3】
GPS衛星からの電波の強度を指定する強度閾値が前記選別用データに含まれており、前記選別手段が、GPS電波遮断物体の検出に使用するGPS衛星をその受信レベルと前記強度閾値との比較に応じて選別するようになっている、ことを特徴とする請求項1又は請求項2に記載されたGPS電波遮断物体検出システム。
【請求項4】
GPS電波遮断物体の検出に使用するGPS衛星を、GPS衛星の電波がGPSアンテナの周囲の建造物や他のGPS電波遮断物体の影響を受けないゾーンにあるGPS衛星と、それらの影響を受けるゾーンにあるGPS衛星とに区分し、影響を受けないGPS衛星については、このうちのひとつの衛星の電波受信の成否によりGPS電波遮断物体が存否を判定し、一方建造物や他のGPS電波遮断物体の影響を受けるゾーンにあるGPS衛星については、複数のGPS衛星全ての電波受信の成否によりGPS電波遮断物体の存否を判定するようになっている、ことを特徴とする請求項1乃至請求項3の何れかに記載されたGPS電波遮断物体検出システム。
【請求項5】
GPS衛星の方位と仰角または方位と仰角と受信レベルの組データを一定期間に亘って保持するバッファ手段が設けられ、これを参照して一定期間に及ぶ安定状態の有無を検知ことにより、GPS電波遮断物体の検出に使用するGPS衛星を、一定期間に及んで方位と仰角または方位と仰角と受信レベルの安定していたものに絞り込むようになっている、ことを特徴とする請求項1乃至請求項4の何れかに記載されたGPS電波遮断物体検出システム。
【請求項6】
前記GPSアンテナがGPS電波遮断物体の移動経路に臨んで設置されるものであり、前記移動経路に係る進行方向に基づいて前記選別用データのうち方位の部分を設定する方位設定手段が設けられている、ことを特徴とする請求項1乃至請求項5の何れかに記載されたGPS電波遮断物体検出システム。
【請求項7】
前記方位設定手段に加えて又は代えて、前記移動経路に隣接した他の移動経路である隣接経路が有るか無いかの情報に基づいて前記選別用データのうち仰角の部分を設定する仰角設定手段が設けられている、ことを特徴とする請求項6記載のGPS電波遮断物体検出システム。
【請求項8】
前記仰角設定手段が、前記移動経路の斜度に基づいて前記選別用データのうち前記隣接経路側の仰角の部分を加減するようになっている、ことを特徴とする請求項7記載のGPS電波遮断物体検出システム。
【請求項9】
前記仰角設定手段が、前記隣接経路に係る走行スケジュールに基づいて前記選別用データのうち前記隣接経路側の仰角の部分を隣接経路有り時の設定値と隣接経路無し時の設定値との何れかに切り替えるようになっている、ことを特徴とする請求項7又は請求項8に記載されたGPS電波遮断物体検出システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−150797(P2009−150797A)
【公開日】平成21年7月9日(2009.7.9)
【国際特許分類】
【出願番号】特願2007−329536(P2007−329536)
【出願日】平成19年12月21日(2007.12.21)
【出願人】(000207470)大同信号株式会社 (83)
【Fターム(参考)】
【公開日】平成21年7月9日(2009.7.9)
【国際特許分類】
【出願日】平成19年12月21日(2007.12.21)
【出願人】(000207470)大同信号株式会社 (83)
【Fターム(参考)】
[ Back to top ]