
ICタグを用いた位置検出システム
【課題】ICタグと通信してその位置を計測するようなシステムにおいて、アンテナを配置する間隔をできる限り小さくし、より分解能が高い位置の計測ができるようにする位置検出技術を提供することを目的とする。
【解決手段】検出用電波を送信しICタグが応答する応答電波を受信するアンテナを複数並べたアンテナモジュールを備え、各アンテナの前記応答電波の受信状況に基づいて前記ICタグの位置を検出する位置検出システムであって、断面が水平面から傾斜角度を付けたV字形で、表面に磁性体を貼付した誘導干渉防止板の上に前記複数のアンテナを並べて配置し、そのように配置した複数のアンテナ間に、断面が所定数の段差形状を有するくさび形で、その表面に磁性体を貼付した誘導干渉防止壁を、くさび形の先端を前記誘導干渉防止板のアンテナ間に固定したものを、複数列並べて配置することにより、前記アンテナモジュールを構成する。
【解決手段】検出用電波を送信しICタグが応答する応答電波を受信するアンテナを複数並べたアンテナモジュールを備え、各アンテナの前記応答電波の受信状況に基づいて前記ICタグの位置を検出する位置検出システムであって、断面が水平面から傾斜角度を付けたV字形で、表面に磁性体を貼付した誘導干渉防止板の上に前記複数のアンテナを並べて配置し、そのように配置した複数のアンテナ間に、断面が所定数の段差形状を有するくさび形で、その表面に磁性体を貼付した誘導干渉防止壁を、くさび形の先端を前記誘導干渉防止板のアンテナ間に固定したものを、複数列並べて配置することにより、前記アンテナモジュールを構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、小動物の行動の解析などを行うためにICタグを用いて位置を検出する技術に関する。
【背景技術】
【0002】
従来、小動物の行動を観察・解析する装置として、例えば特許文献1および2に記載のようなものが知られている。
【0003】
特許文献1は、実験用の小動物にRFIDタグ(無線タグ)を取り付け、その実験用小動物を入れる容器に隣接して、例えば底面側に複数のRFIDリーダを並べ、該小動物に取り付けたタグと該複数のリーダとの間で送受信される情報に基づいて、該タグの位置(すなわち小動物の位置)を検出するものである。特許文献2は、実験用テーブルにRFIDセンサと圧電センサとを並べ、観察する対象の小動物にはRFIDタグを取り付け、該タグの信号を実験用テーブルのセンサで収集して観測対象の動物の位置や挙動を解析するものである。
【特許文献1】特開2002−58648
【特許文献2】特開2002−65109
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記従来技術では、RFIDタグを用いて小動物の位置を検出することはできるが、実験用小動物を入れる容器の例えば底面側に複数のセンサ(アンテナ)を配置したテーブルにおいては、該アンテナ同士の電波の干渉を避けるために、ある程度アンテナ同士を離して配置する必要があった。以下、このことについて説明する。
【0005】
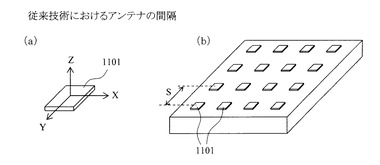
図11(a)は、1つのアンテナ1101に対して設定したXYZ座標軸(アンテナ面縦方向のX軸と、アンテナ面横方向のY軸と、アンテナ面に垂直なZ軸)を示す。アンテナ1101の大きさは、15mm×35mm程度である。ICタグとして10φのものを用いた場合、アンテナ単独では、X軸方向で35mm、Y軸方向で40mm、Z軸方向で40mmの範囲でICタグの読み取りを行うことができる。この範囲を外れると読み取ることができない。ICタグ5.5φを用いた場合、X軸方向で25mm、Y軸方向で28mm、Z軸方向で28mmの読み取り性能がある。図11(b)は、このようなアンテナ1101を所定のテーブル上に碁盤の目のように配置した例である。ここで、アンテナの中心間の距離Sが近すぎるとアンテナ間に干渉が生じ、適正な読み取りができなくなる。
【0006】
いま、2つのアンテナAとBとを距離Sだけ離して設置し、アンテナAの中心部にICタグを配置して読み取る場合を考える。この場合、本来アンテナAで受信がされるが、アンテナAとBとの間隔Sが近い場合、電波の誘導が発生し、アンテナBでも読み取ることができる。逆に、アンテナAB間で干渉が発生し、アンテナAの読み取り性能が劣化する場合もある。ICタグとして10φのものを用いて実験した結果、距離Sが65mm以上だとアンテナAB間の誘導(干渉)がなくなるが、距離Sが60mm以下だと誘導が観測され適切に読み取ることができないことが観測された。また、ICタグとして5.5φのものを用いて実験した結果、距離Sが55mm以上だと誘導なしに読み取ることができるが、50mm以下だと誘導(干渉)が観測され適正に読み取ることができないことが観測された。さらに、誘導のなくなる間隔までアンテナAB間の距離Sを広げると、アンテナ間の隙間の真ん中付近ではほとんど読み取りが困難となるという問題があった。
【0007】
以上のように、複数のアンテナを並べた形態でICタグの位置の検出を行う場合、アンテナ間の距離として誘導を防止するために必要なだけの間隔を取る必要があった。そのため、検出するICタグの位置の分解能に限界があり、より細かな位置を検出したい場合に対処することができないという問題があった。また、アンテナ間の中間点付近での読み取りが困難となるという問題もあった。
【0008】
本発明は、ICタグと通信してそのICタグの位置を計測するようなシステムにおいて、アンテナを配置する間隔をできる限り小さくし、より分解能が高い位置の計測ができるようにする位置検出技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するため、請求項1に係る発明は、検出用電波を送信し該検出用電波に対してICタグが応答する応答電波を受信するアンテナを、複数並べたアンテナモジュールを備え、該アンテナモジュール内の各アンテナの前記応答電波の受信状況に基づいて前記ICタグの位置を検出する、位置検出システムであって、断面が水平面から傾斜角度を付けたV字形で、その表面に磁性体を貼付した誘導干渉防止板の上に、前記複数のアンテナを並べて配置したものを、複数列並べて配置することにより前記アンテナモジュールを構成することを特徴とする。
【0010】
請求項2に係る発明は、検出用電波を送信し該検出用電波に対してICタグが応答する応答電波を受信するアンテナを、複数並べたアンテナモジュールを備え、該アンテナモジュール内の各アンテナの前記応答電波の受信状況に基づいて前記ICタグの位置を検出する、位置検出システムであって、前記アンテナモジュール内の複数のアンテナの少なくとも一部分のアンテナ間に、断面が所定数の段差形状を有するくさび形で、その表面に磁性体を貼付した誘導干渉防止壁を、くさび形の先端をアンテナ間の基板上に固定してアンテナ間を遮るようにすることにより、前記アンテナモジュールを構成することを特徴とする。
【0011】
請求項3に係る発明は、検出用電波を送信し該検出用電波に対してICタグが応答する応答電波を受信するアンテナを、複数並べたアンテナモジュールを備え、該アンテナモジュール内の各アンテナの前記応答電波の受信状況に基づいて前記ICタグの位置を検出する、位置検出システムであって、断面が水平面から傾斜角度を付けたV字形で、表面に磁性体を貼付した誘導干渉防止板の上に、前記複数のアンテナを並べて配置し、そのように配置した複数のアンテナ間に、断面が所定数の段差形状を有するくさび形で、その表面に磁性体を貼付した誘導干渉防止壁を、くさび形の先端を前記誘導干渉防止板のアンテナ間に固定したものを、複数列並べて配置することにより、前記アンテナモジュールを構成することを特徴とする。
【発明の効果】
【0012】
本発明によれば、断面が水平面より若干の傾斜角度を付けたV字型でその表面に磁性体の層を添付した誘導干渉防止板の上にアンテナを並べているので、その断面形状と磁性体の層の効果により、アンテナの裏側方向への電波の回り込みや漏れ電波特性を弱め、アンテナ間の誘導・干渉を防止することができる。これにより、高密度、高出力でアンテナを配置することができ、アンテナを配置する間隔をできる限り小さくし、より分解能が高い位置の計測ができる。小型ICタグを使用した場合でも通信距離を長くすることが可能になる。
【0013】
また、アンテナとアンテナの間に、断面が段差形状を有するくさび形でその表面に磁性体の層を添付した誘導干渉防止壁を配置しているので、その断面形状と磁性体の層の効果により、隣り合うアンテナ間で電波を遮断でき、漏れ電波特性を弱め、アンテナ間の誘導を防止できる。これにより、個々のアンテナから出力される電波特性を一定とすることで干渉も防止できる。また、高密度、高出力でアンテナを配置することができ、アンテナを配置する間隔をできる限り小さくし、より分解能が高い位置の計測ができるので、小型リーダが実現できる。小型リーダで複数のICタグの読取りができる、輻輳制御が実現される。
【発明を実施するための最良の形態】
【0014】
以下、図面を用いて本発明の実施の形態を説明する。
【0015】
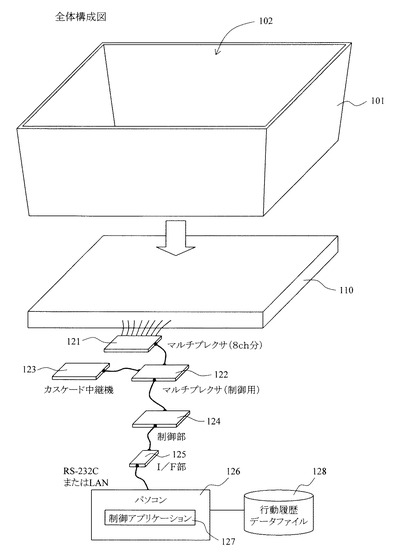
図1は、本発明の実施の形態に係る位置検出システムを適用した小動物の行動解析装置の全体構成を示す。容器101は、その内部102に小動物(ICタグを取り付けたもの)を入れるためのものである。この容器101をアンテナモジュール110の上に載置する。アンテナモジュール110内には8個×8列のアンテナが配置され、1列の8個のアンテナが1系列(1ch)の接続ラインで接続されている。したがって、アンテナモジュール110からは8系列(ch)分の接続ラインが引き出されており、それらの各接続ラインはマルチプレクサ121に接続されている。
【0016】
マルチプレクサ121には、1列分の8個のアンテナを駆動制御するコントロールモジュール(駆動回路)が8台(8ch分)設けてある。制御用マルチプレクサ122は、マルチプレクサ121内の8ch分のコントロールモジュールを制御する制御用モジュールである。カスケード中継機123は、モード設定(オートスキャン、トリガモード、ポーリングモードなど)を行うモジュールである。オートスキャンは、全てのアンテナから常時検出用電波を出力し、ICタグの読み取りを行うモードである。トリガモードは、指定したアンテナだけ常時検出用電波を出力し、ICタグの読み取りを行うモードである。ポーリングモードは、指定したアンテナについて順番に、検出用電波の出力を行い、ICタグの読み取りを行うモードである。
【0017】
制御部124は、アンテナの出力を制御するモジュールである。インターフェース部125は、パソコンと制御部124とを接続するためのインターフェースモジュールである。パソコン126は汎用のPCであり、制御アプリケーション127がインストールされ実行されている。この制御アプリケーション127は本システムにおける専用ソフトウェアであり、アンテナを駆動するコマンドを発行し、その結果を取得し、行動履歴に必要な情報を付加してデータファイル128に格納するなどの処理を行う。行動履歴データファイル128は、制御アプリケーション127から出力されたデータを格納するファイルである。
【0018】
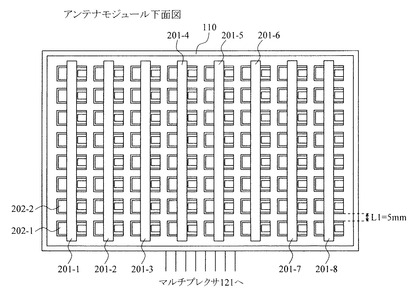
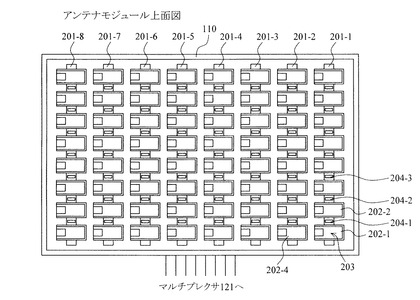
図2はアンテナモジュール110の下面図であり、図3は上面図である。アンテナモジュール110は、プラスチックケース内部に複数のアンテナ(8個×8列)を配置したものであるが、図2および図3はそのプラスチックケースを透視して見た内部の様子を示している。
【0019】
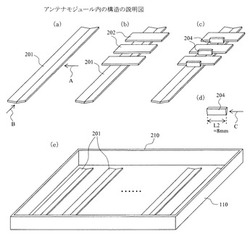
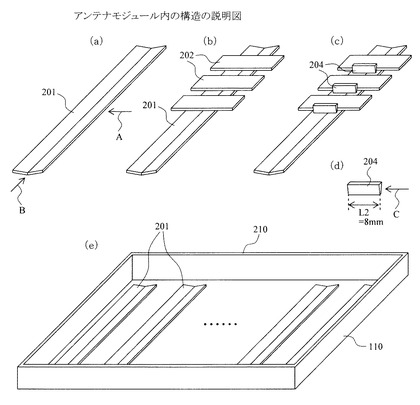
図4は、アンテナモジュール110内の構造を説明するための図である。図4(e)に示すように、まずアンテナモジュール110の外側を構成するプラスチックケース210内に、誘導干渉防止板201を並べて配置する。ここでは8本の誘導干渉防止板201を等間隔に並べるものとする。これらの誘導干渉防止板201は、任意の方法で箱110に固定すればよい。ここでは、箱110の底面から少し浮かせた状態で螺子止めで固定しているが、その固定の方法については図示していない。
【0020】
図4(a)は、誘導干渉防止板201の1つを示す。誘導干渉防止板201については、図5を用いて後に詳しく説明する。
【0021】
図4(e)のように、ケース210内に誘導干渉防止板201を8列等間隔に配置した後、図4(b)に示すように、アンテナ202を各列の誘導干渉防止板201の上に等間隔に8個配置する。アンテナ202の固定の方法も任意である。さらに、図4(c)に示すように、各アンテナ202間に誘導干渉防止壁204を設置する。図4(d)は、誘導干渉防止壁204の外観を示す。誘導干渉防止壁204については、図6を用いて後に詳しく説明する。図4(c)のように誘導干渉防止壁204を設置する方法は任意であるが、ここでは接着剤を用いて接着している。
【0022】
以上のようにして、8個のアンテナ202を1枚の誘導干渉防止板201上に配置し、アンテナ202の間に誘導干渉防止壁204を配置したものを1列分として、8列分をケース210内に配置する。図2の下面図および図3の上面図において、201−1〜201−8は8本の誘導干渉防止板201を示す。202−1,202−2は、誘導干渉防止板201−1の上に配置されたアンテナである。同様にして、全体で8×8=64個のアンテナが配置されている。図4の上面図において、204−1〜204−3は誘導干渉防止壁を示す。
【0023】
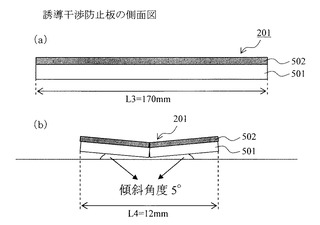
図5は、誘導干渉防止板201の構造を示す。図5(a)は、図4(a)の誘導干渉防止板201を矢印Aの方向から見た側面図(あるいは断面図と見てもよい)である。図5(b)は、矢印Bの方向から見た側面図である。これらの図から分かるように、誘導干渉防止板201は、基板となる長さL3=170mmで厚さ約2mmのプラスチック板を図5(b)のように水平面から傾斜角度が5°程度になるように貼り合わせて、断面がV字型のプラスチック基板501を形成し(幅L4=12mm程度)、さらにそのプラスチック基板501の上面に約0.25mmの厚さの磁性体の層502を貼り付けたものである。この磁性体としては、アスペクト比が大きい磁性合金フレークを使用した。
【0024】
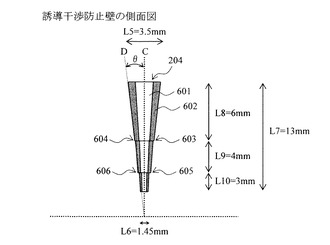
図6は、図4(c)および(d)に示した誘導干渉防止壁204を、図4(d)の矢印C側から見た側面図を示す。誘導干渉防止壁204は、断面が楔形のプラスチック板601の両側面に磁性体602(図6の網掛け部分)を貼り付けて構成する。また、誘導干渉防止壁204の側面には、図6から分かるように、段差603〜606が設けられている。中心線Lから側面のDまでの角度θは約85〜88°とする。この磁性体としては、アスペクト比が大きい磁性合金フレークを使用した。なお図4(d)に示すように、誘導干渉防止壁204の長さL2=8mm程度とする。また図6に示すように、誘導干渉防止壁204の上部の厚みL5=3.5mm、下部の厚みL6=1.45mmとし、高さL7=13mmとした。各段差の位置は、L8〜L10に示す位置とした。
【0025】
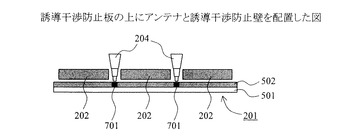
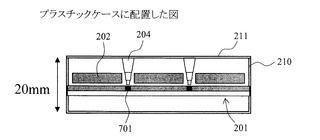
図7は、図4(c)で説明したように誘導干渉防止板201の上にアンテナ202と誘導干渉防止壁204を配置した様子を示す側面図(あるいは断面図)である。701は誘導干渉防止壁204を誘導干渉防止板201上に固定する接着剤の部分を示す。図8は、図7の構成をアンテナモジュール110の外側部分となるプラスチックケース210内に配置した様子を示す。211は、ケース210の蓋部分である。なお、誘導干渉防止壁204の上面部と蓋部分211とを接着剤などで固定してもよい。
【0026】
上述したように、本実施形態では、断面が水平面より若干の傾斜角度を付けたV字型でその表面に磁性体の層を添付した誘導干渉防止板201の上に、アンテナ202を並べているので、その断面形状と磁性体の層の効果により、アンテナの裏側方向への電波の回り込みや漏れ電波特性を弱め、アンテナ間の誘導・干渉を防止することができる。これにより、高密度、高出力でアンテナを配置することができ、小型ICタグを使用した場合でも通信距離を長くすることが可能になる。なお、例えば図3のアンテナ202−1上で、実際のアンテナ回路の配線があるのは中心部203付近のみである。したがって、図2や図3ではアンテナ202−1が誘導干渉防止板201をはみ出しているが、アンテナ202−1の中心部203にあるアンテナ回路部分は誘導干渉防止板201をはみ出してはいない。そのため、図2や図3におけるアンテナ202−1の横方向からアンテナ裏側への電波の回り込みが誘導干渉防止板201のV字形状断面によって防止されるものである。
【0027】
また、本実施形態では、アンテナとアンテナの間に、断面が段差形状を有するくさび形でその表面に磁性体の層を添付した誘導干渉防止壁204を配置しているので、その断面形状と磁性体の層の効果により、隣り合うアンテナ間(図2や図3における縦方向)で電波を遮断でき、漏れ電波特性を弱め、アンテナ間の誘導を防止できる。これにより、個々のアンテナから出力される電波特性を一定とすることで干渉も防止できる。また、高密度、高出力でアンテナを配置することができ、小型リーダが実現できる。小型リーダで複数のICタグの読取りができる、輻輳制御が実現される。
【0028】
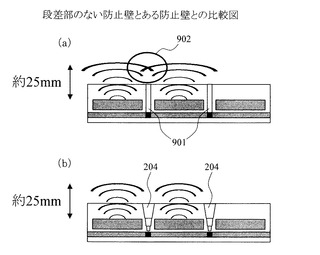
図9は、側面に段差形状のない誘導干渉防止壁と段差形状のあるものとの比較図である。図9(a)は段差のない誘導干渉防止壁901を用いた例であり、図9(b)は段差のある防止壁204を用いた例である。図9(a)の場合、電波の横方向の広がりは防止できるが、通信距離18〜25mm付近で誘導902が発生する場合がある。図9(b)の場合、電波の横方向の広がりを防止することができる。角度θは、図6で説明したように、85°〜88°が好適である。θ=85°以下の場合、通信距離が、θ=80°で18mm、θ=75°で15mm、θ=70°で13mm、というように減少する。
【0029】
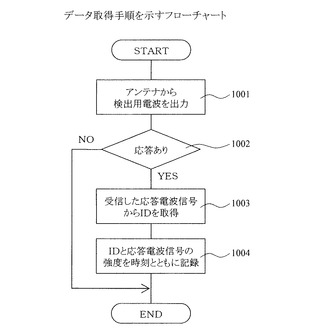
図10は、ICタグの位置データを取得する手順を示すフローチャートである。この動作は、パソコン126の制御アプリケーション127からのコマンドに基づき、制御部124およびマルチプレクサ121,122により実行されるものである。まずステップ1001で、設定されているモードに応じて、所定のアンテナから検出用電波を出力する。小動物に付けられたICタグは、この検出用電波を検出すると、応答の電波を返信する。ステップ1002で応答があった場合、ステップ1003で、受信した応答電波信号に含まれている当該ICタグのIDを取得し、ステップ1004で、そのIDと応答電波信号の強度を時刻とともに記録する。以上の処理を所定の時間間隔で繰り返し行うことにより、制御アプリケーション127はデータを取得し、行動履歴データファイル128に書き込む。行動履歴データファイルのIDと応答電波信号の強度および時刻を解析することにより、何時にどのタグがどの位置にあったかを解析することができる。
【0030】
上記実施形態では、誘導干渉防止板201と誘導干渉防止壁204を設けたことにより、高密度アンテナ配置と誘導干渉の防止を実現できる。高密度アンテナ配置について言えば、電波出力が300mW時に、従来は55mmの間隔制限があったものを、アンテナ間の間隔を5mmまで狭めることが可能となった。すなわち、従来は3段×4列で合計12個のアンテナを55mmピッチで配置していたのを、8段×8列で合計64個のアンテナを5mmピッチ(図2のL1=5mm)で配置することができた。これにより、300mm×200mmのケースで、35mm×15mmのアンテナを複数設置する場合、約5倍の密度で設置することができた。また、誘導干渉の防止について言えば、従来は電波出力が300mW時に5mm間隔でアンテナを設置した場合、2〜3個のアンテナ分の誘導・干渉が発生し、正確な位置情報を特定・取得することが困難だったのが、本実施形態では、電波出力が300mW時に5mm間隔でアンテナを設置しても誘導・干渉は発生しなくなった。
【0031】
なお、上記実施形態では、例えばアンテナ202−1と202−4との間には誘導干渉防止壁を配置していないが、配置するようにしても良い。
【図面の簡単な説明】
【0032】
【図1】実施形態の位置検出システムを適用した小動物の行動解析装置の全体構成図
【図2】アンテナモジュールの下面図
【図3】アンテナモジュールの上面図
【図4】アンテナモジュール内の構造を説明するための図
【図5】誘導干渉防止板の構造を説明するための図
【図6】誘導干渉防止壁の構造を説明するための図
【図7】誘導干渉防止板の上にアンテナと誘導干渉防止壁を配置した様子を示す側面図
【図8】プラスチックケース内に配置した様子を示す図
【図9】側面に段差形状のない誘導干渉防止壁と段差形状のあるものとの比較図
【図10】ICタグの位置データを取得する手順を示すフローチャート
【図11】従来技術の説明図
【符号の説明】
【0033】
101…容器、102…容器の内部、110…アンテナモジュール、121…マルチプレクサ、122…制御用マルチプレクサ、123…カスケード中継機、124…制御部、125…インターフェース部、126…パソコン、127…制御アプリケーション、128…行動履歴データファイル。
【技術分野】
【0001】
本発明は、小動物の行動の解析などを行うためにICタグを用いて位置を検出する技術に関する。
【背景技術】
【0002】
従来、小動物の行動を観察・解析する装置として、例えば特許文献1および2に記載のようなものが知られている。
【0003】
特許文献1は、実験用の小動物にRFIDタグ(無線タグ)を取り付け、その実験用小動物を入れる容器に隣接して、例えば底面側に複数のRFIDリーダを並べ、該小動物に取り付けたタグと該複数のリーダとの間で送受信される情報に基づいて、該タグの位置(すなわち小動物の位置)を検出するものである。特許文献2は、実験用テーブルにRFIDセンサと圧電センサとを並べ、観察する対象の小動物にはRFIDタグを取り付け、該タグの信号を実験用テーブルのセンサで収集して観測対象の動物の位置や挙動を解析するものである。
【特許文献1】特開2002−58648
【特許文献2】特開2002−65109
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記従来技術では、RFIDタグを用いて小動物の位置を検出することはできるが、実験用小動物を入れる容器の例えば底面側に複数のセンサ(アンテナ)を配置したテーブルにおいては、該アンテナ同士の電波の干渉を避けるために、ある程度アンテナ同士を離して配置する必要があった。以下、このことについて説明する。
【0005】
図11(a)は、1つのアンテナ1101に対して設定したXYZ座標軸(アンテナ面縦方向のX軸と、アンテナ面横方向のY軸と、アンテナ面に垂直なZ軸)を示す。アンテナ1101の大きさは、15mm×35mm程度である。ICタグとして10φのものを用いた場合、アンテナ単独では、X軸方向で35mm、Y軸方向で40mm、Z軸方向で40mmの範囲でICタグの読み取りを行うことができる。この範囲を外れると読み取ることができない。ICタグ5.5φを用いた場合、X軸方向で25mm、Y軸方向で28mm、Z軸方向で28mmの読み取り性能がある。図11(b)は、このようなアンテナ1101を所定のテーブル上に碁盤の目のように配置した例である。ここで、アンテナの中心間の距離Sが近すぎるとアンテナ間に干渉が生じ、適正な読み取りができなくなる。
【0006】
いま、2つのアンテナAとBとを距離Sだけ離して設置し、アンテナAの中心部にICタグを配置して読み取る場合を考える。この場合、本来アンテナAで受信がされるが、アンテナAとBとの間隔Sが近い場合、電波の誘導が発生し、アンテナBでも読み取ることができる。逆に、アンテナAB間で干渉が発生し、アンテナAの読み取り性能が劣化する場合もある。ICタグとして10φのものを用いて実験した結果、距離Sが65mm以上だとアンテナAB間の誘導(干渉)がなくなるが、距離Sが60mm以下だと誘導が観測され適切に読み取ることができないことが観測された。また、ICタグとして5.5φのものを用いて実験した結果、距離Sが55mm以上だと誘導なしに読み取ることができるが、50mm以下だと誘導(干渉)が観測され適正に読み取ることができないことが観測された。さらに、誘導のなくなる間隔までアンテナAB間の距離Sを広げると、アンテナ間の隙間の真ん中付近ではほとんど読み取りが困難となるという問題があった。
【0007】
以上のように、複数のアンテナを並べた形態でICタグの位置の検出を行う場合、アンテナ間の距離として誘導を防止するために必要なだけの間隔を取る必要があった。そのため、検出するICタグの位置の分解能に限界があり、より細かな位置を検出したい場合に対処することができないという問題があった。また、アンテナ間の中間点付近での読み取りが困難となるという問題もあった。
【0008】
本発明は、ICタグと通信してそのICタグの位置を計測するようなシステムにおいて、アンテナを配置する間隔をできる限り小さくし、より分解能が高い位置の計測ができるようにする位置検出技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するため、請求項1に係る発明は、検出用電波を送信し該検出用電波に対してICタグが応答する応答電波を受信するアンテナを、複数並べたアンテナモジュールを備え、該アンテナモジュール内の各アンテナの前記応答電波の受信状況に基づいて前記ICタグの位置を検出する、位置検出システムであって、断面が水平面から傾斜角度を付けたV字形で、その表面に磁性体を貼付した誘導干渉防止板の上に、前記複数のアンテナを並べて配置したものを、複数列並べて配置することにより前記アンテナモジュールを構成することを特徴とする。
【0010】
請求項2に係る発明は、検出用電波を送信し該検出用電波に対してICタグが応答する応答電波を受信するアンテナを、複数並べたアンテナモジュールを備え、該アンテナモジュール内の各アンテナの前記応答電波の受信状況に基づいて前記ICタグの位置を検出する、位置検出システムであって、前記アンテナモジュール内の複数のアンテナの少なくとも一部分のアンテナ間に、断面が所定数の段差形状を有するくさび形で、その表面に磁性体を貼付した誘導干渉防止壁を、くさび形の先端をアンテナ間の基板上に固定してアンテナ間を遮るようにすることにより、前記アンテナモジュールを構成することを特徴とする。
【0011】
請求項3に係る発明は、検出用電波を送信し該検出用電波に対してICタグが応答する応答電波を受信するアンテナを、複数並べたアンテナモジュールを備え、該アンテナモジュール内の各アンテナの前記応答電波の受信状況に基づいて前記ICタグの位置を検出する、位置検出システムであって、断面が水平面から傾斜角度を付けたV字形で、表面に磁性体を貼付した誘導干渉防止板の上に、前記複数のアンテナを並べて配置し、そのように配置した複数のアンテナ間に、断面が所定数の段差形状を有するくさび形で、その表面に磁性体を貼付した誘導干渉防止壁を、くさび形の先端を前記誘導干渉防止板のアンテナ間に固定したものを、複数列並べて配置することにより、前記アンテナモジュールを構成することを特徴とする。
【発明の効果】
【0012】
本発明によれば、断面が水平面より若干の傾斜角度を付けたV字型でその表面に磁性体の層を添付した誘導干渉防止板の上にアンテナを並べているので、その断面形状と磁性体の層の効果により、アンテナの裏側方向への電波の回り込みや漏れ電波特性を弱め、アンテナ間の誘導・干渉を防止することができる。これにより、高密度、高出力でアンテナを配置することができ、アンテナを配置する間隔をできる限り小さくし、より分解能が高い位置の計測ができる。小型ICタグを使用した場合でも通信距離を長くすることが可能になる。
【0013】
また、アンテナとアンテナの間に、断面が段差形状を有するくさび形でその表面に磁性体の層を添付した誘導干渉防止壁を配置しているので、その断面形状と磁性体の層の効果により、隣り合うアンテナ間で電波を遮断でき、漏れ電波特性を弱め、アンテナ間の誘導を防止できる。これにより、個々のアンテナから出力される電波特性を一定とすることで干渉も防止できる。また、高密度、高出力でアンテナを配置することができ、アンテナを配置する間隔をできる限り小さくし、より分解能が高い位置の計測ができるので、小型リーダが実現できる。小型リーダで複数のICタグの読取りができる、輻輳制御が実現される。
【発明を実施するための最良の形態】
【0014】
以下、図面を用いて本発明の実施の形態を説明する。
【0015】
図1は、本発明の実施の形態に係る位置検出システムを適用した小動物の行動解析装置の全体構成を示す。容器101は、その内部102に小動物(ICタグを取り付けたもの)を入れるためのものである。この容器101をアンテナモジュール110の上に載置する。アンテナモジュール110内には8個×8列のアンテナが配置され、1列の8個のアンテナが1系列(1ch)の接続ラインで接続されている。したがって、アンテナモジュール110からは8系列(ch)分の接続ラインが引き出されており、それらの各接続ラインはマルチプレクサ121に接続されている。
【0016】
マルチプレクサ121には、1列分の8個のアンテナを駆動制御するコントロールモジュール(駆動回路)が8台(8ch分)設けてある。制御用マルチプレクサ122は、マルチプレクサ121内の8ch分のコントロールモジュールを制御する制御用モジュールである。カスケード中継機123は、モード設定(オートスキャン、トリガモード、ポーリングモードなど)を行うモジュールである。オートスキャンは、全てのアンテナから常時検出用電波を出力し、ICタグの読み取りを行うモードである。トリガモードは、指定したアンテナだけ常時検出用電波を出力し、ICタグの読み取りを行うモードである。ポーリングモードは、指定したアンテナについて順番に、検出用電波の出力を行い、ICタグの読み取りを行うモードである。
【0017】
制御部124は、アンテナの出力を制御するモジュールである。インターフェース部125は、パソコンと制御部124とを接続するためのインターフェースモジュールである。パソコン126は汎用のPCであり、制御アプリケーション127がインストールされ実行されている。この制御アプリケーション127は本システムにおける専用ソフトウェアであり、アンテナを駆動するコマンドを発行し、その結果を取得し、行動履歴に必要な情報を付加してデータファイル128に格納するなどの処理を行う。行動履歴データファイル128は、制御アプリケーション127から出力されたデータを格納するファイルである。
【0018】
図2はアンテナモジュール110の下面図であり、図3は上面図である。アンテナモジュール110は、プラスチックケース内部に複数のアンテナ(8個×8列)を配置したものであるが、図2および図3はそのプラスチックケースを透視して見た内部の様子を示している。
【0019】
図4は、アンテナモジュール110内の構造を説明するための図である。図4(e)に示すように、まずアンテナモジュール110の外側を構成するプラスチックケース210内に、誘導干渉防止板201を並べて配置する。ここでは8本の誘導干渉防止板201を等間隔に並べるものとする。これらの誘導干渉防止板201は、任意の方法で箱110に固定すればよい。ここでは、箱110の底面から少し浮かせた状態で螺子止めで固定しているが、その固定の方法については図示していない。
【0020】
図4(a)は、誘導干渉防止板201の1つを示す。誘導干渉防止板201については、図5を用いて後に詳しく説明する。
【0021】
図4(e)のように、ケース210内に誘導干渉防止板201を8列等間隔に配置した後、図4(b)に示すように、アンテナ202を各列の誘導干渉防止板201の上に等間隔に8個配置する。アンテナ202の固定の方法も任意である。さらに、図4(c)に示すように、各アンテナ202間に誘導干渉防止壁204を設置する。図4(d)は、誘導干渉防止壁204の外観を示す。誘導干渉防止壁204については、図6を用いて後に詳しく説明する。図4(c)のように誘導干渉防止壁204を設置する方法は任意であるが、ここでは接着剤を用いて接着している。
【0022】
以上のようにして、8個のアンテナ202を1枚の誘導干渉防止板201上に配置し、アンテナ202の間に誘導干渉防止壁204を配置したものを1列分として、8列分をケース210内に配置する。図2の下面図および図3の上面図において、201−1〜201−8は8本の誘導干渉防止板201を示す。202−1,202−2は、誘導干渉防止板201−1の上に配置されたアンテナである。同様にして、全体で8×8=64個のアンテナが配置されている。図4の上面図において、204−1〜204−3は誘導干渉防止壁を示す。
【0023】
図5は、誘導干渉防止板201の構造を示す。図5(a)は、図4(a)の誘導干渉防止板201を矢印Aの方向から見た側面図(あるいは断面図と見てもよい)である。図5(b)は、矢印Bの方向から見た側面図である。これらの図から分かるように、誘導干渉防止板201は、基板となる長さL3=170mmで厚さ約2mmのプラスチック板を図5(b)のように水平面から傾斜角度が5°程度になるように貼り合わせて、断面がV字型のプラスチック基板501を形成し(幅L4=12mm程度)、さらにそのプラスチック基板501の上面に約0.25mmの厚さの磁性体の層502を貼り付けたものである。この磁性体としては、アスペクト比が大きい磁性合金フレークを使用した。
【0024】
図6は、図4(c)および(d)に示した誘導干渉防止壁204を、図4(d)の矢印C側から見た側面図を示す。誘導干渉防止壁204は、断面が楔形のプラスチック板601の両側面に磁性体602(図6の網掛け部分)を貼り付けて構成する。また、誘導干渉防止壁204の側面には、図6から分かるように、段差603〜606が設けられている。中心線Lから側面のDまでの角度θは約85〜88°とする。この磁性体としては、アスペクト比が大きい磁性合金フレークを使用した。なお図4(d)に示すように、誘導干渉防止壁204の長さL2=8mm程度とする。また図6に示すように、誘導干渉防止壁204の上部の厚みL5=3.5mm、下部の厚みL6=1.45mmとし、高さL7=13mmとした。各段差の位置は、L8〜L10に示す位置とした。
【0025】
図7は、図4(c)で説明したように誘導干渉防止板201の上にアンテナ202と誘導干渉防止壁204を配置した様子を示す側面図(あるいは断面図)である。701は誘導干渉防止壁204を誘導干渉防止板201上に固定する接着剤の部分を示す。図8は、図7の構成をアンテナモジュール110の外側部分となるプラスチックケース210内に配置した様子を示す。211は、ケース210の蓋部分である。なお、誘導干渉防止壁204の上面部と蓋部分211とを接着剤などで固定してもよい。
【0026】
上述したように、本実施形態では、断面が水平面より若干の傾斜角度を付けたV字型でその表面に磁性体の層を添付した誘導干渉防止板201の上に、アンテナ202を並べているので、その断面形状と磁性体の層の効果により、アンテナの裏側方向への電波の回り込みや漏れ電波特性を弱め、アンテナ間の誘導・干渉を防止することができる。これにより、高密度、高出力でアンテナを配置することができ、小型ICタグを使用した場合でも通信距離を長くすることが可能になる。なお、例えば図3のアンテナ202−1上で、実際のアンテナ回路の配線があるのは中心部203付近のみである。したがって、図2や図3ではアンテナ202−1が誘導干渉防止板201をはみ出しているが、アンテナ202−1の中心部203にあるアンテナ回路部分は誘導干渉防止板201をはみ出してはいない。そのため、図2や図3におけるアンテナ202−1の横方向からアンテナ裏側への電波の回り込みが誘導干渉防止板201のV字形状断面によって防止されるものである。
【0027】
また、本実施形態では、アンテナとアンテナの間に、断面が段差形状を有するくさび形でその表面に磁性体の層を添付した誘導干渉防止壁204を配置しているので、その断面形状と磁性体の層の効果により、隣り合うアンテナ間(図2や図3における縦方向)で電波を遮断でき、漏れ電波特性を弱め、アンテナ間の誘導を防止できる。これにより、個々のアンテナから出力される電波特性を一定とすることで干渉も防止できる。また、高密度、高出力でアンテナを配置することができ、小型リーダが実現できる。小型リーダで複数のICタグの読取りができる、輻輳制御が実現される。
【0028】
図9は、側面に段差形状のない誘導干渉防止壁と段差形状のあるものとの比較図である。図9(a)は段差のない誘導干渉防止壁901を用いた例であり、図9(b)は段差のある防止壁204を用いた例である。図9(a)の場合、電波の横方向の広がりは防止できるが、通信距離18〜25mm付近で誘導902が発生する場合がある。図9(b)の場合、電波の横方向の広がりを防止することができる。角度θは、図6で説明したように、85°〜88°が好適である。θ=85°以下の場合、通信距離が、θ=80°で18mm、θ=75°で15mm、θ=70°で13mm、というように減少する。
【0029】
図10は、ICタグの位置データを取得する手順を示すフローチャートである。この動作は、パソコン126の制御アプリケーション127からのコマンドに基づき、制御部124およびマルチプレクサ121,122により実行されるものである。まずステップ1001で、設定されているモードに応じて、所定のアンテナから検出用電波を出力する。小動物に付けられたICタグは、この検出用電波を検出すると、応答の電波を返信する。ステップ1002で応答があった場合、ステップ1003で、受信した応答電波信号に含まれている当該ICタグのIDを取得し、ステップ1004で、そのIDと応答電波信号の強度を時刻とともに記録する。以上の処理を所定の時間間隔で繰り返し行うことにより、制御アプリケーション127はデータを取得し、行動履歴データファイル128に書き込む。行動履歴データファイルのIDと応答電波信号の強度および時刻を解析することにより、何時にどのタグがどの位置にあったかを解析することができる。
【0030】
上記実施形態では、誘導干渉防止板201と誘導干渉防止壁204を設けたことにより、高密度アンテナ配置と誘導干渉の防止を実現できる。高密度アンテナ配置について言えば、電波出力が300mW時に、従来は55mmの間隔制限があったものを、アンテナ間の間隔を5mmまで狭めることが可能となった。すなわち、従来は3段×4列で合計12個のアンテナを55mmピッチで配置していたのを、8段×8列で合計64個のアンテナを5mmピッチ(図2のL1=5mm)で配置することができた。これにより、300mm×200mmのケースで、35mm×15mmのアンテナを複数設置する場合、約5倍の密度で設置することができた。また、誘導干渉の防止について言えば、従来は電波出力が300mW時に5mm間隔でアンテナを設置した場合、2〜3個のアンテナ分の誘導・干渉が発生し、正確な位置情報を特定・取得することが困難だったのが、本実施形態では、電波出力が300mW時に5mm間隔でアンテナを設置しても誘導・干渉は発生しなくなった。
【0031】
なお、上記実施形態では、例えばアンテナ202−1と202−4との間には誘導干渉防止壁を配置していないが、配置するようにしても良い。
【図面の簡単な説明】
【0032】
【図1】実施形態の位置検出システムを適用した小動物の行動解析装置の全体構成図
【図2】アンテナモジュールの下面図
【図3】アンテナモジュールの上面図
【図4】アンテナモジュール内の構造を説明するための図
【図5】誘導干渉防止板の構造を説明するための図
【図6】誘導干渉防止壁の構造を説明するための図
【図7】誘導干渉防止板の上にアンテナと誘導干渉防止壁を配置した様子を示す側面図
【図8】プラスチックケース内に配置した様子を示す図
【図9】側面に段差形状のない誘導干渉防止壁と段差形状のあるものとの比較図
【図10】ICタグの位置データを取得する手順を示すフローチャート
【図11】従来技術の説明図
【符号の説明】
【0033】
101…容器、102…容器の内部、110…アンテナモジュール、121…マルチプレクサ、122…制御用マルチプレクサ、123…カスケード中継機、124…制御部、125…インターフェース部、126…パソコン、127…制御アプリケーション、128…行動履歴データファイル。
【特許請求の範囲】
【請求項1】
検出用電波を送信し該検出用電波に対してICタグが応答する応答電波を受信するアンテナを、複数並べたアンテナモジュールを備え、該アンテナモジュール内の各アンテナの前記応答電波の受信状況に基づいて前記ICタグの位置を検出する、位置検出システムであって、
断面が水平面から傾斜角度を付けたV字形で、その表面に磁性体を貼付した誘導干渉防止板の上に、前記複数のアンテナを並べて配置したものを、複数列並べて配置することにより前記アンテナモジュールを構成することを特徴とするICタグを用いた位置検出システム。
【請求項2】
検出用電波を送信し該検出用電波に対してICタグが応答する応答電波を受信するアンテナを、複数並べたアンテナモジュールを備え、該アンテナモジュール内の各アンテナの前記応答電波の受信状況に基づいて前記ICタグの位置を検出する、位置検出システムであって、
前記アンテナモジュール内の複数のアンテナの少なくとも一部分のアンテナ間に、断面が所定数の段差形状を有するくさび形で、その表面に磁性体を貼付した誘導干渉防止壁を、くさび形の先端をアンテナ間の基板上に固定してアンテナ間を遮るようにすることにより、前記アンテナモジュールを構成することを特徴とするICタグを用いた位置検出システム。
【請求項3】
検出用電波を送信し該検出用電波に対してICタグが応答する応答電波を受信するアンテナを、複数並べたアンテナモジュールを備え、該アンテナモジュール内の各アンテナの前記応答電波の受信状況に基づいて前記ICタグの位置を検出する、位置検出システムであって、
断面が水平面から傾斜角度を付けたV字形で、表面に磁性体を貼付した誘導干渉防止板の上に、前記複数のアンテナを並べて配置し、そのように配置した複数のアンテナ間に、断面が所定数の段差形状を有するくさび形で、その表面に磁性体を貼付した誘導干渉防止壁を、くさび形の先端を前記誘導干渉防止板のアンテナ間に固定したものを、複数列並べて配置することにより、前記アンテナモジュールを構成することを特徴とするICタグを用いた位置検出システム。
【請求項1】
検出用電波を送信し該検出用電波に対してICタグが応答する応答電波を受信するアンテナを、複数並べたアンテナモジュールを備え、該アンテナモジュール内の各アンテナの前記応答電波の受信状況に基づいて前記ICタグの位置を検出する、位置検出システムであって、
断面が水平面から傾斜角度を付けたV字形で、その表面に磁性体を貼付した誘導干渉防止板の上に、前記複数のアンテナを並べて配置したものを、複数列並べて配置することにより前記アンテナモジュールを構成することを特徴とするICタグを用いた位置検出システム。
【請求項2】
検出用電波を送信し該検出用電波に対してICタグが応答する応答電波を受信するアンテナを、複数並べたアンテナモジュールを備え、該アンテナモジュール内の各アンテナの前記応答電波の受信状況に基づいて前記ICタグの位置を検出する、位置検出システムであって、
前記アンテナモジュール内の複数のアンテナの少なくとも一部分のアンテナ間に、断面が所定数の段差形状を有するくさび形で、その表面に磁性体を貼付した誘導干渉防止壁を、くさび形の先端をアンテナ間の基板上に固定してアンテナ間を遮るようにすることにより、前記アンテナモジュールを構成することを特徴とするICタグを用いた位置検出システム。
【請求項3】
検出用電波を送信し該検出用電波に対してICタグが応答する応答電波を受信するアンテナを、複数並べたアンテナモジュールを備え、該アンテナモジュール内の各アンテナの前記応答電波の受信状況に基づいて前記ICタグの位置を検出する、位置検出システムであって、
断面が水平面から傾斜角度を付けたV字形で、表面に磁性体を貼付した誘導干渉防止板の上に、前記複数のアンテナを並べて配置し、そのように配置した複数のアンテナ間に、断面が所定数の段差形状を有するくさび形で、その表面に磁性体を貼付した誘導干渉防止壁を、くさび形の先端を前記誘導干渉防止板のアンテナ間に固定したものを、複数列並べて配置することにより、前記アンテナモジュールを構成することを特徴とするICタグを用いた位置検出システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2008−241268(P2008−241268A)
【公開日】平成20年10月9日(2008.10.9)
【国際特許分類】
【出願番号】特願2007−78041(P2007−78041)
【出願日】平成19年3月26日(2007.3.26)
【出願人】(598067670)国立精神・神経センター総長 (7)
【出願人】(500194887)日立アイ・エヌ・エス・ソフトウェア株式会社 (9)
【Fターム(参考)】
【公開日】平成20年10月9日(2008.10.9)
【国際特許分類】
【出願日】平成19年3月26日(2007.3.26)
【出願人】(598067670)国立精神・神経センター総長 (7)
【出願人】(500194887)日立アイ・エヌ・エス・ソフトウェア株式会社 (9)
【Fターム(参考)】
[ Back to top ]