
ICチップ実装体の製造装置
【課題】フィルム上のアンテナ回路に対してICチップを精度よく搭載することで実装精度を向上させることができるICチップ実装体の製造装置を提供する。
【解決手段】支持ローラ33の単位回転量を支持ローラ33の外周面を観察して検出する検出手段12と、支持ローラ33の正規回転量に対する回転量の誤差に関する関数を用いて検出した単位回転量に応じた誤差を割り出す割出手段13と、支持ローラ33の外周面上における検出手段12で観察される観察対象位置がICチップ搭載位置まで回転移動する際の正規回転量及び割出手段13により割り出した誤差から、支持ローラ33の外周面上における観察対象位置がICチップ搭載位置まで回転移動する際の実際の回転量を求める回転量求め手段14と、回転量求め手段14により求められた実際の回転量に基づいて同期ローラ31の回転を制御する回転制御手段15とを備えた。
【解決手段】支持ローラ33の単位回転量を支持ローラ33の外周面を観察して検出する検出手段12と、支持ローラ33の正規回転量に対する回転量の誤差に関する関数を用いて検出した単位回転量に応じた誤差を割り出す割出手段13と、支持ローラ33の外周面上における検出手段12で観察される観察対象位置がICチップ搭載位置まで回転移動する際の正規回転量及び割出手段13により割り出した誤差から、支持ローラ33の外周面上における観察対象位置がICチップ搭載位置まで回転移動する際の実際の回転量を求める回転量求め手段14と、回転量求め手段14により求められた実際の回転量に基づいて同期ローラ31の回転を制御する回転制御手段15とを備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ICチップ実装体を製造するICチップ実装体の製造装置に関する。
【背景技術】
【0002】
従来、アンテナ回路が間隔を置いて複数形成されたフィルムを所定の方向に搬送する搬送手段と、該搬送手段による搬送途中のICチップ搭載位置で、アンテナ回路に対して電気接続するように、該アンテナ回路にICチップを搭載する同期ローラとを備えたICチップ実装体の製造装置が提案されている。
【0003】
かかるICチップ実装体の製造装置は、同期ローラの真下に位置するICチップ搭載位置においてフィルムを下面側から支持しつつ回転する支持ローラを備えており、該支持ローラによってフィルムを支持することによって、ICチップ搭載時にフィルムが撓むことがなく、従ってアンテナ回路にICチップを安定して搭載することができる。
【0004】
また、前記ICチップ実装体の製造装置は、ICチップ搭載位置よりも搬送方向上流側に設けられるCCDカメラを更に備えており、該CCDカメラを用いて搬送途中のフィルム上のアンテナ回路を撮像してその位置を計測し、該計測位置とアンテナ回路が前記撮像時点で本来位置すべき正規の位置との差から位置補正量を求め、この位置補正量に基づいて同期ローラの位置を補正すべく該同期ローラを位置制御するように構成されている。この構成によれば、CCDカメラでの撮像時点(ICチップ搭載位置よりも搬送方向上流側に位置する撮像位置)におけるアンテナ回路の位置ずれに対応して同期ローラの位置を補正することができるため、ICチップを前記位置補正量を加味した位置でアンテナ回路に搭載することができる(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−183847号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記従来のICチップ実装体の製造装置にあっては、支持ローラの真円度にバラツキ(誤差)が含まれていたり、支持ローラの設置位置にバラツキ(偏芯)が含まれていたりする。かかる誤差や偏芯などのバラツキが支持ローラに含まれていると、CCDカメラの撮像位置からICチップ搭載位置までの支持ローラの外周面における回転量(実機の回転量)は、誤差や偏芯などのバラツキが支持ローラに含まれていない場合の、前記撮像位置からICチップ搭載位置までの支持ローラの外周面における回転量(正規の回転量)に対して前記誤差や偏芯などのバラツキに応じた誤差が含まれた値となる。
【0007】
そして、前記回転量は、アンテナ回路が前記撮像位置からICチップ搭載位置まで移動する回転量に相当するところ、かかる回転量に含まれる前記誤差は、CCDカメラでの撮像位置におけるアンテナ回路の位置ずれを補正する上記従来の補正方式では対応(補正)することができない。従って、上記従来のICチップ実装体の製造装置にあっては、撮像位置におけるアンテナ回路の位置ずれに応じて同期ローラを補正しているにも関わらず、ICチップ搭載位置では、前記回転量の誤差に起因したずれが生じてアンテナ回路に対してICチップを精度よく搭載することができず、ICチップの実装精度が悪化するという問題があった。尚、このような問題は、CCDカメラでアンテナ回路を撮像する場合に限らず、例えば、光学式ロータリエンコーダを用いる場合にも生じうる問題である。
【0008】
そこで、本発明はかかる状況に鑑みてなされたものであって、フィルム上のアンテナ回路に対してICチップを精度よく搭載することで実装精度を向上させることができるICチップ実装体の製造装置を提供することにある。
【課題を解決するための手段】
【0009】
即ち、本発明のICチップ実装体の製造装置は、前述の課題解決のために、アンテナ回路が間隔を置いて複数設けられたフィルムを所定の方向に搬送する搬送手段と、該搬送手段による搬送途中のICチップ搭載位置で前記アンテナ回路にICチップを搭載する回転自在な同期ローラと、前記フィルムを下面側から支持しつつ回転する支持ローラとを備えているICチップ実装体の製造装置であって、前記支持ローラの単位時間当たりの回転量である単位回転量を該支持ローラの外周面を観察して検出する検出手段と、前記支持ローラの正規回転量に対する回転量の誤差に関する関数を用いて前記検出した単位回転量に応じた誤差を割り出す割出手段と、前記支持ローラの外周面上における前記検出手段で観察される観察対象位置がICチップ搭載位置まで回転移動する際の正規回転量及び前記割出手段により割り出した誤差から、前記支持ローラの外周面上における前記観察対象位置がICチップ搭載位置まで回転移動する際の実際の回転量を求める回転量求め手段と、該回転量求め手段により求められた実際の回転量に基づいて前記同期ローラの回転を制御する回転制御手段とを備えていることを特徴としている。
【0010】
上記構成によれば、検出手段が支持ローラの単位回転量を検出し、割出手段が、支持ローラの正規回転量に対する回転量の誤差に関する関数を用いて前記検出した単位回転量に応じた誤差、つまり、支持ローラの正規回転量に対する実質的な支持ローラの回転ずれ量(誤差回転量)を割り出す。そして、回転量求め手段が、前記割り出した誤差と、支持ローラの外周面上の前記検出手段で観察される観察対象位置がICチップ搭載位置まで回転移動する際の正規回転量とから、支持ローラの実際の回転量を求める。このようにして求めた実際の回転量に基づいて、回転制御手段が同期ローラの回転を制御することによって、支持ローラの真円度のバラツキ(誤差)や支持ローラの設置位置のバラツキ(偏芯)などに起因する支持ローラの回転量の誤差を吸収することができ、アンテナ回路に対してICチップを精度よく搭載することができる。
【0011】
また、本発明のICチップ実装体の製造装置は、前記支持ローラが所定回転する毎に信号を出力する出力手段を更に備え、前記検出手段は、支持ローラの外周面上を搬送される前記アンテナ回路のピッチから単位回転量を検出するよう構成され、前記割出手段が用いる関数は、誤差が前記支持ローラの回転量に応じて周期的に変化する関数であり、前記割出手段は、前記出力手段からの信号を受信すると、関数を用いて誤差を割り出すための回転量を、前記関数の周期の開始時点における回転量に合わせるように構成されてもよい。
【0012】
ところで、支持ローラでフィルムを支持する構成を採用した場合には、フィルムが支持ローラに対してスリップしたり、フィルムが搬送中に伸び縮みすることにより、支持ローラの回転量とフィルムの搬送量との間に差が生じてしまうところ、支持ローラの単位回転量をアンテナ回路のピッチから検出する構成では、検出される単位回転量の値に、前記差に応じた誤差が含まれてしまうこととなる。そうすると、単位回転量を用いて割り出される誤差にも、当然誤差が含まれることとなるから、結果的に、同期ローラの回転制御が不正確となってICチップの実装精度が悪化してしまう。また、支持ローラの回転量とフィルムの搬送量との間に生じる前記差は、支持ローラの回転が進むにつれて累積されて大きくなるから、支持ローラの回転数が多くなるほど単位回転量に含まれる誤差が大きくなる。一方、支持ローラの回転量の誤差についての関数は一定周期である。従って、支持ローラの回転数が多くなるほど、割出手段で割り出される誤差(誤差回転量)が不正確なものとなって、一層実装精度が悪化してしまう。このような問題に鑑みて、上記のように、支持ローラが所定回転する毎に出力される信号により、関数を用いて誤差を割り出すための回転量を周期の開始時点の回転量に合わせるように構成することで、支持ローラが所定回転する毎に、関数の周期の開始時点に合わせて誤差の割り出しを行うことができるから、単位回転量に応じた誤差(誤差回転量)を比較的正確に割り出すことができ、ICチップの実装精度が悪化することを抑制することができる。
【発明の効果】
【0013】
本発明によれば、支持ローラの回転量の誤差を補正した実際の回転量に基づいて同期ローラの回転を制御するので、フィルム上のアンテナ回路に対してICチップを精度よく搭載することができ、実装精度を向上させることができるという効果を奏する。
【図面の簡単な説明】
【0014】
【図1】本発明の第一の実施形態に係るICチップ実装体の製造装置を示す概略図である。
【図2】本発明の第一の一実施形態に係るICチップ実装体の製造装置の要部を示す概略図である。
【図3】本発明の第一の実施形態に係るICチップ実装体の製造装置の制御部を示すブロック図である。
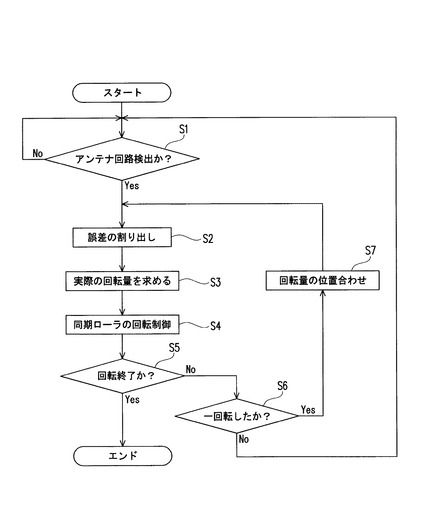
【図4】図3の制御部の動作を示すフローチャートである。
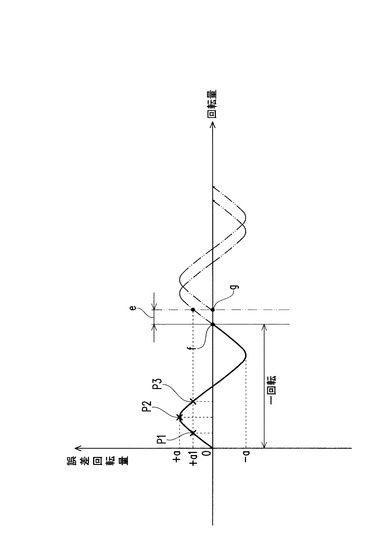
【図5】支持ローラの回転量に対する誤差回転量を示すグラフである。
【発明を実施するための形態】
【0015】
以下、本発明に係るICチップ実装体の製造装置を図面に基づいて説明する。
【0016】
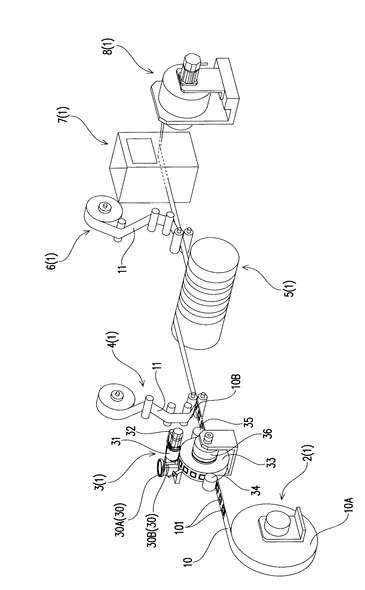
まず、図1及び図2に基づいて、製造装置1の全体概略構成を説明する。製造装置1は、搬送手段2と、ICチップ供給手段3と、保護紙搬送手段4と、接着剤キュア手段5と、保護紙巻取手段6と、テスト手段7と、巻取手段8と、それらの手段を制御する制御部U(図3参照)とを備えている。
【0017】
搬送手段2は、通信用アンテナとなるアンテナ回路(通信用アンテナ)101が間隔を置いて多数形成されたフィルム10を巻き取ったロール10Aからフィルム10を搬送する手段である。この搬送は、フィルム10の長手方向(所定の方向)に沿って定速で行われる。
【0018】
ICチップ供給手段3は、フィルム10にICチップChを供給して接着剤により実装する手段であり、ICチップChを搬送するパーツフィーダ(振動フィーダに相当する)30と、パーツフィーダ30からのICチップChを受け取って搬送されるフィルム10上面に搭載する同期ローラ31と、該同期ローラ31を回転させる同期ローラ駆動手段32とを備えている。
【0019】
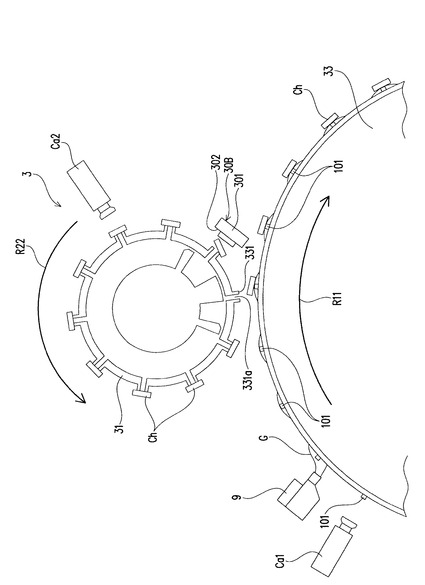
パーツフィーダ30は、ICチップChを収容するボウルフィーダー30Aと、ボウルフィーダー30Aから供給されてくるICチップChを定速度で一定方向に搬送するリニアフィーダ30Bとを備えている。ボウルフィーダー30AはICチップChをリニアフィーダ30Bに向けて搬送するための螺旋状の搬送面(図示せず)を有している。リニアフィーダ30Bは、直線状の搬送路(搬送トラフ)301を備え、その上面が平坦な搬送面302とされている。リニアフィーダ30Bは、ボウルフィーダー30Aに連結されて、リニアフィーダ30Bの搬送面302はボウルフィーダー30Aの搬送面に連続するように接続されている。パーツフィーダ30において、ボウルフィーダー30Aの振動によってICチップChが、ボウルフィーダー30Aの搬送面からリニアフィーダ30Bの搬送面302に向けて、整列されつつ搬送されるように構成されている。尚、搬送面302は、幅方向一方側が支持ローラ33の外周面に向けて下傾斜するよう設けられている(図2参照)。
【0020】
また、ICチップ供給手段3は、同期ローラ31の下方に位置するICチップ搭載位置においてフィルム10を下面側から支持する回転自在な支持ローラ(クロックローラとも呼ばれている)33を備え、更に、この支持ローラ33のフィルム方向前後に、フィルム10を下方へ押し付けて該フィルム10を支持ローラ33の表面の所定領域に亘って押し付けるための前後一対の押圧ローラ34,35を備えている。
【0021】
支持ローラ33は、支持ローラ駆動手段36である駆動モータによりフィルム10の移動速度(搬送速度)と同期する速度で横軸回りに(図2では、時計回りR11に)回転するように構成されている。この支持ローラ33は、筒状に形成されており、周方向に吸着孔(図示せず)が等間隔で複数箇所に形成され、ローラ表面にフィルム10を真空吸着するように構成されている。フィルム10上のアンテナ回路101の位置を認識するアンテナ回路認識手段、具体的には、アンテナ回路を撮像してその位置を計測する撮像手段としてのCCDカメラCa1が、同期ローラ31及び支持ローラ33のフィルム搬送方向上流側で、同期ローラ31の下方且つ支持ローラ33の上方に配設されている。このCCDカメラCa1は、その光軸が支持ローラ33の表面に対して垂直となる、即ち、支持ローラ33の外周面を撮像することができるように配置され、該外周面に沿って搬送されるアンテナ回路101を撮像してその画像を処理して制御部Uへ入力するように構成されている。また、支持ローラ33のフィルム搬送方向上流側でCCDカメラCa1よりも少し下流側には、搬送されるアンテナ回路101の位置に合わせて接着剤を塗布する接着剤供給手段9が設けられている。
【0022】
同期ローラ31は、同期ローラ駆動手段32である駆動モータにより支持ローラ33の回転速度と同期する速度で横軸回りに(図2では反時計回りR22)間欠的に駆動される。同期ローラ31は、その外周面が支持ローラ33の外周面と対向するよう配置されている。換言すれば、支持ローラ33と同期ローラ31とが、円筒面同士で対向配置されている。また、支持ローラ33は、同期ローラ31よりも大径に構成されている。
【0023】
同期ローラ31の外周面には、軸方向に一列で周方向一定間隔置きに、ICチップChを保持する吸着ノズル331が設けられている。吸着ノズル331は、同期ローラ31の外周面からわずかに突出する突起状に形成されている。各吸着ノズル331の中心には、ICチップChを吸引保持するための吸着孔331aが形成されている。同期ローラ31は、同期ローラ駆動手段32の駆動による回転(回転方向R22)に伴って、各吸着ノズル331が、リニアフィーダ30Bの搬送面の下流端部まで搬送されてきたICチップChを一個ずつ吸引し、その吸引力によって保持するように構成されている。吸着ノズル331に吸着されたICチップChは、同期ローラ31の上流側の上方に配置されたCCDカメラCa2により撮像され、その姿勢が確認される。
【0024】
同期ローラ31は、吸着ノズル331が、フィルム10上のICチップChの搭載位置(アンテナ回路101に対してICチップChが電気接続される位置)に対応する位置、つまり、アンテナ回路101に対してICチップChを搭載するICチップ搭載位置まで回転すると、吸着孔331a内が大気圧となって、それまで吸引力(負圧)によって保持していたICチップChの吸引力が開放され、ICチップChが吸着ノズル331から離脱してフィルム10(アンテナ回路101)に搭載される構成になっている。尚、ここでは、ICチップChを搭載する位置であるICチップ搭載位置は、吸着ノズル331が最下位置に到着した位置としており、吸着孔331a内が大気圧となるのは、その僅かに手前になるように構成されている。
【0025】
保護紙搬送手段4は、ICチップChが実装されたフィルム体10Bを被覆する保護紙11を供給してフィルム体10Bに重ねる手段である。接着剤キュア手段5は、加熱により接着剤を硬化させる手段である。
【0026】
保護紙巻取手段6は、フィルム体10Bに重ねた保護紙11を剥がして巻き取る手段である。テスト手段7は、フィルム体10Bに所定の回路が構成されているかどうかを検査する手段である。巻取手段8は、フィルム体10Bをロール状に巻き取る手段である。
【0027】
上記構成の製造装置1においては、アンテナ回路101が形成されたフィルム10を巻き取ったロール10Aを搬送手段2により回転させ、ロール10Aから送り出されるフィルム10のアンテナ回路101上に接着剤供給手段9によって接着剤が塗布される。そして、接着剤が塗布されたアンテナ回路101上にICチップ供給手段3によりICチップChが供給されて搭載(実装)される。続いて、ICチップChが搭載されたフィルム体10Bに、保護紙搬送手段4により保護紙11を送り出して重ねるように被覆し、接着剤キュア手段5によりフィルム体10Bを加熱して接着剤G(図2参照)を硬化させる。保護紙11は、保護紙巻取手段6により巻き取られることでフィルム体10Bから巻き取って外される。次に、テスト手段7でフィルム体10Bに所定の回路が構成されているかどうかを検査し、巻取手段8によりICチップChが実装されたフィルム体10Bがロール状に巻き取られ、ICチップ実装体が連続して巻き取られたロールが製造される。
【0028】
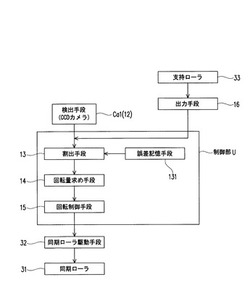
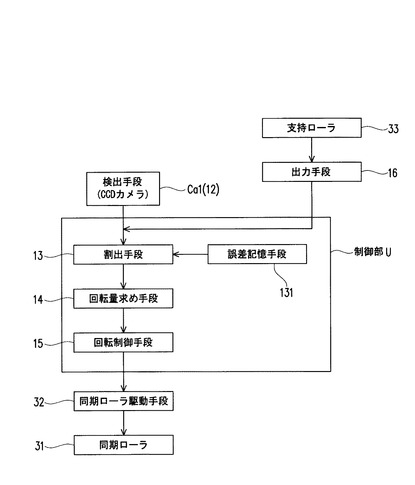
次に、かかる製造装置1の制御部Uについて説明する。該制御部Uは、前述したように各種の手段2〜9を制御する他、同期ローラ31の回転を制御することができるように構成されている。図3に示すように、制御部Uには、支持ローラ33の単位時間当たりの回転量である単位回転量を支持ローラ33の外周面を観察して検出する検出手段12と、支持ローラ33が所定回転(例えば、一回転や二回転、半回転などが例示できるが、ここでは一回転とする)する毎に信号を出力する出力手段16とが、ハードウェア構成部品として接続されている。これら検出手段12及び出力手段16からの出力される信号が入力される制御部Uは、支持ローラ33の正規回転量に対する回転量の誤差に関する関数を用いて単位回転量に応じた誤差を割り出す割出手段13と、割出手段13により割り出した誤差と支持ローラ33の外周面上の前記検出手段12で観察される観察対象位置がICチップ搭載位置まで移動する際の正規回転量とから支持ローラ33の実際の回転量を求める回転量求め手段14と、回転量求め手段14により求められた実際の回転量に基づいて同期ローラ31の回転を制御する回転制御手段15とを備えている。
【0029】
尚、回転量とは、支持ローラ33の外周面上の一点が、該支持ローラ33の回転に伴って周方向に移動する外周長さのことである。また、正規回転量とは、支持ローラ33が真円度のバラツキ(形状誤差)や設置位置のバラツキ(偏芯)などが無い理想的な構成であることを前提とし、その支持ローラ33の外周面上の一点が、理想的な移動軌跡(理論上の移動軌跡)を辿った場合の外周長さのことである。更に、支持ローラ33の正規回転量に対する回転量の誤差とは、支持ローラ33の正規回転量(正規の外周長さ)と、支持ローラ33の実質的な回転ずれ量、換言すると実測の回転量(実測の外周長さ)との差(誤差回転量)のことである。更に、回転量求め手段14が求める支持ローラ33の実際の回転量とは、検出手段12が観察した観察対象位置である支持ローラ33の外周面上の一点が、その観察対象位置からICチップ搭載位置まで実際に移動するであろう外周長さ(実際の外周長さ)のことである。
【0030】
検出手段12は、前記CCDカメラCa1からなり、該CCDカメラCa1により支持ローラ33の外周面上を搬送されるフィルム10上の複数のアンテナ回路101を、CCDカメラCa1の撮像範囲を通過する順に撮像するように構成されている。そして、検出手段12は、先に撮像された画像からアンテナ回路101の位置を計測し、次に撮像されたアンテナ回路101との間のピッチを単位回転量として計測するように構成されている。これら順次計測されたアンテナ回路101の位置及びアンテナ回路101,101間のピッチは、制御部Uに記憶される。
【0031】
割出手段13は、支持ローラ33の正規回転量に対する回転量の誤差に関する関数から誤差(誤差回転量)を割り出す手段である。割出手段13で用いる関数は、実際に支持ローラ33を所定角度回転させたときの実測した回転量と、形状(真円度)や設置位置に誤差を含まない理想的な支持ローラ33を所定角度回転させたときの正規の回転量との間の誤差を求め、そのデータをプロットすることにより得られる周期的に変化するサインカーブのグラフ(図5参照)、或いは、それらのデータを表にしたテーブルである。かかる関数は、図3に示すように制御部Uの誤差記憶手段131に記憶されている。そして、割出手段13は、誤差記憶手段131に記憶されている関数を読み出して、検出手段12で検出した単位回転量に応じた誤差を割り出す。尚、図5のグラフは、縦軸に誤差回転量(誤差)を取り、横軸に支持ローラ33の回転量を取った周期的に誤差回転量が変化する曲線状のグラフである。割出手段13は、このグラフと前記検出手段12により検出されたアンテナ回路101の位置とピッチ(単位回転量)とを用いることによって、検出した単位回転量に応じた誤差(誤差回転量)を割出すことができる。例えば、所定位置のアンテナ回路101(P1)と次のアンテナ回路101(P2)との間のピッチ(単位回転量)が検出手段12で検出されると、P1の位置から横軸(回転量軸)に沿って単位回転量の分だけ移動し、その位置での誤差回転量を読み出すことで、検出した単位回転量に応じた誤差回転量を割り出すことができる。尚、図5では、関数として、最大値がプラスaで、最小値がマイナスaの値のサインカーブのグラフを示しているが、このグラフに限定されるものではなく、例えば、周期的でない曲線のグラフでもよい。
【0032】
また、割出手段13は、前記出力手段16から信号が出力されると、前記関数(グラフ)を用いて誤差を割り出すための回転量を周期の開始時点の回転量に合わせるよう、構成されている。具体的には、支持ローラ33が一回転したことを示す信号が出力手段16としての原点センサ(例えばフォトセンサ等)から出力され、その信号を割出手段13が受信すると、該割出手段13は、次に検出された単位回転量を、関数の周期の初期時点(図5では、回転量の横軸の原点近傍)に合わせて、それを基準に誤差を割り出す。換言すると、割出手段13は、前記信号を受信すると、横軸(回転量軸)の位相を初期化(リセット)し、それを基準に次の割出を行うように構成されている。
【0033】
回転量求め手段14は、割出手段13により割り出された誤差の回転量を支持ローラ33の正規回転量に加えることにより、支持ローラ33の実際の回転量を求める手段である。従って、前記のようにグラフにおいて所定番目のアンテナ回路101の位置(支持ローラ33の回転量)に対する誤差回転量(誤差)を読み出し、その読み出した誤差を支持ローラ33の正規回転量に加えることによって、実際の回転量を求めることができる。
【0034】
回転制御手段15は、同期ローラ31を回転開始させるタイミングを、回転量求め手段14により求められた実際の回転量に基づいて調整することによって、同期ローラ31の回転を制御する手段であり、例えば、求められた実際の回転量が正規の回転量よりも小さい場合には、検出手段12の観察対象位置(撮像位置)からICチッブ搭載位置までアンテナ回路101が移動する時間が正規の時間よりも長くなるので、同期ローラ31の回転開始タイミングを正規のタイミングよりも遅くする。また、求められた実際の回転量が正規の回転量よりも大きい場合には、検出手段12の観察対象位置(撮像位置)からICチッブ搭載位置までアンテナ回路101が移動する時間が正規の時間よりも短くなるので、同期ローラ31の回転開始タイミングを正規のタイミングよりも速くする。このように同期ローラ31を回転開始させるタイミングを調整することによって、ICチッブ搭載位置において、ICチッブChをアンテナ回路101に確実に搭載(実装)することができる。
【0035】
前記制御部Uにより同期ローラ31の回転制御について、図4のフローチャートに基づいて説明する。まず、検出手段12は、支持ローラ33の単位時間当たりの回転量である単位回転量を該支持ローラ33の外周面を観察して検出する(ステップS1)。具体的には、検出手段12としての撮像手段であるCCDカメラCa1が、支持ローラ33の外周面上を順次搬送されるアンテナ回路101を搬送順に撮像(観察)し、該撮像したデータを処理してアンテナ回路101のピッチを導出し、該アンテナ回路101のピッチを支持ローラ33の回転量に変換して単位回転量を算出(検出)する。
【0036】
そして、検出手段12が単位回転量を検出すると、それを受信した割出手段13は、支持ローラ33の正規回転量に対する回転量の誤差に関する関数を用いて、前記検出した単位回転量に応じた誤差(誤差回転量)を割り出す(ステップS2)。具体的には、割出手段13は、単位回転量を受信すると、誤差記憶手段131から前記関数を読み出し、該関数に前記単位回転量を組み込んで該単位回転量に対する誤差(誤差回転量)を割り出す。尚、関数が、図5に示すグラフである場合には、単位回転量を横軸にプロットして該横軸上の位置を決定し、該位置における誤差(縦軸の値)を読み取ることで割り出しを行う。また、関数がテーブルである場合には、該テーブルから単位回転量に対応した誤差を読み出すことで割り出しを行う。尚、関数が回転量を変数とする誤差(誤差回転量)の数式である場合には、検出した単位回転量を数式に代入して誤差を算出することで割り出しを行う。
【0037】
そして、割出手段13が誤差(誤差回転量)を割り出すと、回転量求め手段14は、支持ローラ33の外周面上における検出手段12によって撮像(観察)された観察対象位置(撮像位置)がICチップ搭載位置まで回転移動する際の正規回転量と、割出手段13により割り出した誤差とから、支持ローラ33の外周面上における前記撮像位置がICチップ搭載位置まで回転移動する際の実際の回転量を求める(ステップS3)。具体的には、回転量求め手段14は、割出手段13で割り出した誤差を前記正規回転量に加えて前記実際の回転量を算出する。
【0038】
そして、回転量求め手段14が支持ローラ33の実際の回転量を求めると、回転制御手段15は、該実際の回転量に基づいて同期ローラ31の回転を制御する(ステップS4)。具体的には、回転制御手段15は、実際の回転量と正規の回転量とを比較し、実際の回転量が正規の回転量よりも小さい場合には、同期ローラ31の回転開始タイミングが正規のタイミングよりも遅くなるように同期ローラ駆動手段32を制御し、実際の回転量が正規の回転量よりも大きい場合には、同期ローラ31の回転開始タイミングが正規のタイミングよりも速くなるように同期ローラ駆動手段32を制御する。このように、回転量求め手段14が求めた実際の回転量に基づいて同期ローラ31の回転制御(開始タイミング制御)を行うことによって、ICチップChを精度よくアンテナ回路101に実装することができる。
【0039】
そして、上記フローに基づく同期ローラ31の回転制御は、該制御中に支持ローラ33の回転が終了かどうかを確認し(ステップS5)、回転が終了されるまで続けられる。
【0040】
そして、支持ローラ33の回転が終了していないと制御部Uが判断すると、該制御部Uは、支持ローラ33が一回転したかどうかを出力手段16からの信号に基づいて判断する(ステップS6)。具体的には、制御部Uは、出力手段16としての原点センサが、支持ローラ33の回転原点を検出して原点信号(支持ローラ33が一回転したことを示す信号)を出力すると、一回転したと判断する。
【0041】
そして、制御部Uは、支持ローラ33が一回転していないと判断した場合には(ステップS6でNoの場合)、ステップS1乃至S5の制御を続行する。一方、支持ローラ33が一回転したと判断した場合には(ステップS6でYesの場合)、前記制御をリセットすべく回転量の位置合わせを行って(ステップS7)ステップS2に戻る。具体的には、割出手段13は、出力手段16から出力された信号を受信すると、支持ローラ33が一回転したと判断して、関数を用いて誤差を割り出すための回転量を、該関数の周期の開始時点の回転量に合わせる。より詳細には、割出手段13は、出力手段16からの信号を受信した後に検出された単位回転量を、関数の周期の初期時点(図5では、回転量の横軸の原点近傍)に合わせて該関数に組み込む。
【0042】
換言すると、ステップS7の処理は、誤差を求めるために用いる単位回転量(アンテナ回路101のピッチ)についての支持ローラ33の回転に対する位相を、該支持ローラ33が一回転する毎に、回転原点に合わせて初期化する処理である。要するに、本実施形態における割出手段13は、先に割り出した誤差(誤差回転量)に対応した回転量に、次に検出された単位回転量を累積することで、該次に検出された単位回転量に応じた誤差回転量を割り出すように構成されているから、誤差回転量を割り出すための回転量は、支持ローラ33の回転が進む(多くなる)につれて累積されていくこととなるところ、ステップS7では、支持ローラ33が一回転する毎に前記累積をリセット(初期化)する処理を行う。
【0043】
ここで、前記回転量の位置合わせを行う理由について説明する。本実施形態のように支持ローラ33でフィルム10を支持する構成を採用した場合には、フィルム10が支持ローラ33に対してスリップしたり、フィルム10が搬送中に伸び縮みしたりすることにより、支持ローラ33の回転量とフィルム10の搬送量との間に差が生じてしまうことがある。このような差が発生してしまうと、前記のようにアンテナ回路101のピッチから支持ローラ33の回転量を検出している構成では、検出手段12で検出される単位回転量の値、及び該割出手段13で単位回転量を用いて割り出される誤差(誤差回転量)に、前記差に応じた誤差(スリップ誤差)が含まれてしまうこととなる。そうすると、支持ローラ33の実際の回転量にも前記スリップ誤差が含まれることとなり、結果的に、回転制御手段15による同期ローラ31の回転制御が不正確となってICチップの実装精度が悪化してしまう。
【0044】
また、支持ローラ33の回転量とフィルム10の搬送量との間に生じる前記差は、支持ローラ33の回転が進むにつれて累積されて大きくなるから、支持ローラ33の回転数が多くなるほど単位回転量に含まれるスリップ誤差は大きくなる。一方、図5に示す、支持ローラ33の回転量の誤差(誤差回転量)についての関数は一定周期である。従って、支持ローラ33の回転数が多くなるほど、必然的にスリップ誤差が累積されて大きくなり、その結果、割出手段13で割り出される誤差回転量が不正確なものとなって、一層実装精度が悪化してしまう。
【0045】
かかるスリップ誤差による問題を、図5を用いて更に説明すると、前記スリップ誤差が発生すると、割出手段13では、本来は図5におけるf点における誤差回転量(零)が読み出されるべきであるところ、スリップ誤差eの分だけずれたg点における誤差回転量(+a1)が誤って読み出されてしまい(ステップS2)、読み出された(割り出された)誤差回転量には、+a1のスリップ誤差が含まれることとなる。続いて、かかるスリップ誤差を含んだ誤差回転量に基づいて実際の回転量が求められるから(ステップS3)、求められる実際の回転量にもスリップ誤差が含まれてしまう。そうすると、スリップ誤差を含んだ実際の回転量に基づいて同期ローラ31の回転が制御されるから(ステップS4)、結果的にICチップの実装精度が悪化してしまう。
【0046】
このようなスリップ誤差に基づく実装精度悪化の問題に鑑みて、前記回転量の位置合わせ処理(ステップS7の処理)を行うのである。即ち、支持ローラ33が一回転する毎に出力される信号により、誤差回転量を求めるために用いる関数に組み込む回転量を、該関数の周期の開始時点の回転量に合わせることで、一回転後に検出される単位回転量を、関数の周期の開始時点に合わせて組み込むことができ、該単位回転量に応じた誤差回転量を比較的正確に割り出すことができる結果、ICチップの実装精度が悪化することを抑制することができる。
【0047】
尚、本発明は、前記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々の変更が可能である。
【0048】
前記実施形態では、検出手段16としてフォトセンサを用いたが、各種の非接触式センサの他、リミットセンサなどの接触式センサを用いてもよい。
【0049】
また、前記実施形態では、支持ローラ33が一回転したことを示す出力手段16からの出力信号により、前記回転量の位置合わせ処理(ステップS7の処理)を行う場合について説明したが、これに限らず、出力手段16を省略して前記回転量の位置合わせ処理を行わない構成であってもよい。
【0050】
また、前記実施形態では、関数を割出手段13とは別の誤差記憶手段131に記憶させた場合について説明したが(図3参照)、割出手段13にグラフなどの関数を記憶させてもよい。尚、関数で求めるべき誤差は、支持ローラ33の真円度のバラツキ度合いや支持ローラ33の設置位置の偏芯度合いにより異なるため、図5に示したサインカーブのような曲線になるとは限らない。また、その他の要因で周期的にならない場合もある。
【0051】
また、前記実施形態では、CCDカメラCa1によりフィルム10のアンテナ回路101のピッチから支持ローラ33の単位回転量を検出する場合について説明したが、例えば、光学式ロータリエンコーダにより支持ローラ33の回転量を直接計測してもよい。この場合には、光学式ロータリエンコーダにより支持ローラ33が一回転する毎に信号を出力する出力手段16を兼用構成することができる。この光学式ロータリエンコーダは、外周面に等間隔で多数のスリットが形成され、支持ローラ33と一体回転する回転体と、回転体の表面に光を照射して跳ね返ってきた光を受光する光センサとから構成され、回転している回転体に光センサから光を当てて回転体のスリット間の部分に跳ね返ってきた光の数に基づいて、支持ローラ33の回転量を計測するように構成される。
【0052】
また、前記実施形態では、回転制御手段15が、同期ローラ31の回転開始タイミングを調整する手段であったが、同期ローラ31の回転開始タイミングは同一にした状態で同期ローラ31の回転加速度や回転速度を実際の支持ローラ33の回転量に合わせて調整する手段であってもよい。
【0053】
また、前記実施形態では、検出手段Ca1によりアンテナ回路101を直接検出して位置やピッチを把握するようにしたが、例えばフィルム10のアンテナ回路101に対応する部分にマークを付し、そのマークを検出してアンテナ回路101の位置やピッチを間接的には把握するようにしてもよい。
【0054】
また、前記実施形態において、CCDカメラを用いて搬送途中のフィルム上のアンテナ回路を撮像してその位置を計測し、該計測位置とアンテナ回路が前記撮像時点で本来位置すべき正規の位置との差から位置補正量を求め、この位置補正量に基づいて同期ローラの位置を補正すべく該同期ローラを位置制御するように構成することも可能である。この構成によれば、CCDカメラでの撮像時点(ICチップ搭載位置よりも搬送方向上流側に位置する撮像位置)におけるアンテナ回路の位置ずれに対応して同期ローラの位置を補正することができるため、ICチップを前記位置補正量を加味した位置でアンテナ回路に搭載することができる。
【符号の説明】
【0055】
1…製造装置、2…搬送手段、3…チップ供給手段、4…保護紙搬送手段、5…接着剤キュア手段、6…保護紙巻取手段、7…テスト手段、8…巻取手段、9…接着剤供給手段、10…フィルム、10A…ロール、10B…フィルム体、11…保護紙、12…検出手段、13…割出手段、14…回転量求め手段、15…回転制御手段、16…出力手段、30…パーツフィーダ、30A…ボウルフィーダー、30B…リニアフィーダ、31…同期ローラ、32…同期ローラ駆動手段、33…支持ローラ、34,35…押圧ローラ、36…支持ローラ駆動手段、101…アンテナ回路、121…ピッチ計測手段、122…回転量換算手段、131…誤差記憶手段、331…吸着ノズル、331a…吸着孔、Ca1…CCDカメラ、Ca2…CCDカメラ、Ch…チップ、G…接着剤、U…制御部
【技術分野】
【0001】
本発明は、ICチップ実装体を製造するICチップ実装体の製造装置に関する。
【背景技術】
【0002】
従来、アンテナ回路が間隔を置いて複数形成されたフィルムを所定の方向に搬送する搬送手段と、該搬送手段による搬送途中のICチップ搭載位置で、アンテナ回路に対して電気接続するように、該アンテナ回路にICチップを搭載する同期ローラとを備えたICチップ実装体の製造装置が提案されている。
【0003】
かかるICチップ実装体の製造装置は、同期ローラの真下に位置するICチップ搭載位置においてフィルムを下面側から支持しつつ回転する支持ローラを備えており、該支持ローラによってフィルムを支持することによって、ICチップ搭載時にフィルムが撓むことがなく、従ってアンテナ回路にICチップを安定して搭載することができる。
【0004】
また、前記ICチップ実装体の製造装置は、ICチップ搭載位置よりも搬送方向上流側に設けられるCCDカメラを更に備えており、該CCDカメラを用いて搬送途中のフィルム上のアンテナ回路を撮像してその位置を計測し、該計測位置とアンテナ回路が前記撮像時点で本来位置すべき正規の位置との差から位置補正量を求め、この位置補正量に基づいて同期ローラの位置を補正すべく該同期ローラを位置制御するように構成されている。この構成によれば、CCDカメラでの撮像時点(ICチップ搭載位置よりも搬送方向上流側に位置する撮像位置)におけるアンテナ回路の位置ずれに対応して同期ローラの位置を補正することができるため、ICチップを前記位置補正量を加味した位置でアンテナ回路に搭載することができる(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−183847号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記従来のICチップ実装体の製造装置にあっては、支持ローラの真円度にバラツキ(誤差)が含まれていたり、支持ローラの設置位置にバラツキ(偏芯)が含まれていたりする。かかる誤差や偏芯などのバラツキが支持ローラに含まれていると、CCDカメラの撮像位置からICチップ搭載位置までの支持ローラの外周面における回転量(実機の回転量)は、誤差や偏芯などのバラツキが支持ローラに含まれていない場合の、前記撮像位置からICチップ搭載位置までの支持ローラの外周面における回転量(正規の回転量)に対して前記誤差や偏芯などのバラツキに応じた誤差が含まれた値となる。
【0007】
そして、前記回転量は、アンテナ回路が前記撮像位置からICチップ搭載位置まで移動する回転量に相当するところ、かかる回転量に含まれる前記誤差は、CCDカメラでの撮像位置におけるアンテナ回路の位置ずれを補正する上記従来の補正方式では対応(補正)することができない。従って、上記従来のICチップ実装体の製造装置にあっては、撮像位置におけるアンテナ回路の位置ずれに応じて同期ローラを補正しているにも関わらず、ICチップ搭載位置では、前記回転量の誤差に起因したずれが生じてアンテナ回路に対してICチップを精度よく搭載することができず、ICチップの実装精度が悪化するという問題があった。尚、このような問題は、CCDカメラでアンテナ回路を撮像する場合に限らず、例えば、光学式ロータリエンコーダを用いる場合にも生じうる問題である。
【0008】
そこで、本発明はかかる状況に鑑みてなされたものであって、フィルム上のアンテナ回路に対してICチップを精度よく搭載することで実装精度を向上させることができるICチップ実装体の製造装置を提供することにある。
【課題を解決するための手段】
【0009】
即ち、本発明のICチップ実装体の製造装置は、前述の課題解決のために、アンテナ回路が間隔を置いて複数設けられたフィルムを所定の方向に搬送する搬送手段と、該搬送手段による搬送途中のICチップ搭載位置で前記アンテナ回路にICチップを搭載する回転自在な同期ローラと、前記フィルムを下面側から支持しつつ回転する支持ローラとを備えているICチップ実装体の製造装置であって、前記支持ローラの単位時間当たりの回転量である単位回転量を該支持ローラの外周面を観察して検出する検出手段と、前記支持ローラの正規回転量に対する回転量の誤差に関する関数を用いて前記検出した単位回転量に応じた誤差を割り出す割出手段と、前記支持ローラの外周面上における前記検出手段で観察される観察対象位置がICチップ搭載位置まで回転移動する際の正規回転量及び前記割出手段により割り出した誤差から、前記支持ローラの外周面上における前記観察対象位置がICチップ搭載位置まで回転移動する際の実際の回転量を求める回転量求め手段と、該回転量求め手段により求められた実際の回転量に基づいて前記同期ローラの回転を制御する回転制御手段とを備えていることを特徴としている。
【0010】
上記構成によれば、検出手段が支持ローラの単位回転量を検出し、割出手段が、支持ローラの正規回転量に対する回転量の誤差に関する関数を用いて前記検出した単位回転量に応じた誤差、つまり、支持ローラの正規回転量に対する実質的な支持ローラの回転ずれ量(誤差回転量)を割り出す。そして、回転量求め手段が、前記割り出した誤差と、支持ローラの外周面上の前記検出手段で観察される観察対象位置がICチップ搭載位置まで回転移動する際の正規回転量とから、支持ローラの実際の回転量を求める。このようにして求めた実際の回転量に基づいて、回転制御手段が同期ローラの回転を制御することによって、支持ローラの真円度のバラツキ(誤差)や支持ローラの設置位置のバラツキ(偏芯)などに起因する支持ローラの回転量の誤差を吸収することができ、アンテナ回路に対してICチップを精度よく搭載することができる。
【0011】
また、本発明のICチップ実装体の製造装置は、前記支持ローラが所定回転する毎に信号を出力する出力手段を更に備え、前記検出手段は、支持ローラの外周面上を搬送される前記アンテナ回路のピッチから単位回転量を検出するよう構成され、前記割出手段が用いる関数は、誤差が前記支持ローラの回転量に応じて周期的に変化する関数であり、前記割出手段は、前記出力手段からの信号を受信すると、関数を用いて誤差を割り出すための回転量を、前記関数の周期の開始時点における回転量に合わせるように構成されてもよい。
【0012】
ところで、支持ローラでフィルムを支持する構成を採用した場合には、フィルムが支持ローラに対してスリップしたり、フィルムが搬送中に伸び縮みすることにより、支持ローラの回転量とフィルムの搬送量との間に差が生じてしまうところ、支持ローラの単位回転量をアンテナ回路のピッチから検出する構成では、検出される単位回転量の値に、前記差に応じた誤差が含まれてしまうこととなる。そうすると、単位回転量を用いて割り出される誤差にも、当然誤差が含まれることとなるから、結果的に、同期ローラの回転制御が不正確となってICチップの実装精度が悪化してしまう。また、支持ローラの回転量とフィルムの搬送量との間に生じる前記差は、支持ローラの回転が進むにつれて累積されて大きくなるから、支持ローラの回転数が多くなるほど単位回転量に含まれる誤差が大きくなる。一方、支持ローラの回転量の誤差についての関数は一定周期である。従って、支持ローラの回転数が多くなるほど、割出手段で割り出される誤差(誤差回転量)が不正確なものとなって、一層実装精度が悪化してしまう。このような問題に鑑みて、上記のように、支持ローラが所定回転する毎に出力される信号により、関数を用いて誤差を割り出すための回転量を周期の開始時点の回転量に合わせるように構成することで、支持ローラが所定回転する毎に、関数の周期の開始時点に合わせて誤差の割り出しを行うことができるから、単位回転量に応じた誤差(誤差回転量)を比較的正確に割り出すことができ、ICチップの実装精度が悪化することを抑制することができる。
【発明の効果】
【0013】
本発明によれば、支持ローラの回転量の誤差を補正した実際の回転量に基づいて同期ローラの回転を制御するので、フィルム上のアンテナ回路に対してICチップを精度よく搭載することができ、実装精度を向上させることができるという効果を奏する。
【図面の簡単な説明】
【0014】
【図1】本発明の第一の実施形態に係るICチップ実装体の製造装置を示す概略図である。
【図2】本発明の第一の一実施形態に係るICチップ実装体の製造装置の要部を示す概略図である。
【図3】本発明の第一の実施形態に係るICチップ実装体の製造装置の制御部を示すブロック図である。
【図4】図3の制御部の動作を示すフローチャートである。
【図5】支持ローラの回転量に対する誤差回転量を示すグラフである。
【発明を実施するための形態】
【0015】
以下、本発明に係るICチップ実装体の製造装置を図面に基づいて説明する。
【0016】
まず、図1及び図2に基づいて、製造装置1の全体概略構成を説明する。製造装置1は、搬送手段2と、ICチップ供給手段3と、保護紙搬送手段4と、接着剤キュア手段5と、保護紙巻取手段6と、テスト手段7と、巻取手段8と、それらの手段を制御する制御部U(図3参照)とを備えている。
【0017】
搬送手段2は、通信用アンテナとなるアンテナ回路(通信用アンテナ)101が間隔を置いて多数形成されたフィルム10を巻き取ったロール10Aからフィルム10を搬送する手段である。この搬送は、フィルム10の長手方向(所定の方向)に沿って定速で行われる。
【0018】
ICチップ供給手段3は、フィルム10にICチップChを供給して接着剤により実装する手段であり、ICチップChを搬送するパーツフィーダ(振動フィーダに相当する)30と、パーツフィーダ30からのICチップChを受け取って搬送されるフィルム10上面に搭載する同期ローラ31と、該同期ローラ31を回転させる同期ローラ駆動手段32とを備えている。
【0019】
パーツフィーダ30は、ICチップChを収容するボウルフィーダー30Aと、ボウルフィーダー30Aから供給されてくるICチップChを定速度で一定方向に搬送するリニアフィーダ30Bとを備えている。ボウルフィーダー30AはICチップChをリニアフィーダ30Bに向けて搬送するための螺旋状の搬送面(図示せず)を有している。リニアフィーダ30Bは、直線状の搬送路(搬送トラフ)301を備え、その上面が平坦な搬送面302とされている。リニアフィーダ30Bは、ボウルフィーダー30Aに連結されて、リニアフィーダ30Bの搬送面302はボウルフィーダー30Aの搬送面に連続するように接続されている。パーツフィーダ30において、ボウルフィーダー30Aの振動によってICチップChが、ボウルフィーダー30Aの搬送面からリニアフィーダ30Bの搬送面302に向けて、整列されつつ搬送されるように構成されている。尚、搬送面302は、幅方向一方側が支持ローラ33の外周面に向けて下傾斜するよう設けられている(図2参照)。
【0020】
また、ICチップ供給手段3は、同期ローラ31の下方に位置するICチップ搭載位置においてフィルム10を下面側から支持する回転自在な支持ローラ(クロックローラとも呼ばれている)33を備え、更に、この支持ローラ33のフィルム方向前後に、フィルム10を下方へ押し付けて該フィルム10を支持ローラ33の表面の所定領域に亘って押し付けるための前後一対の押圧ローラ34,35を備えている。
【0021】
支持ローラ33は、支持ローラ駆動手段36である駆動モータによりフィルム10の移動速度(搬送速度)と同期する速度で横軸回りに(図2では、時計回りR11に)回転するように構成されている。この支持ローラ33は、筒状に形成されており、周方向に吸着孔(図示せず)が等間隔で複数箇所に形成され、ローラ表面にフィルム10を真空吸着するように構成されている。フィルム10上のアンテナ回路101の位置を認識するアンテナ回路認識手段、具体的には、アンテナ回路を撮像してその位置を計測する撮像手段としてのCCDカメラCa1が、同期ローラ31及び支持ローラ33のフィルム搬送方向上流側で、同期ローラ31の下方且つ支持ローラ33の上方に配設されている。このCCDカメラCa1は、その光軸が支持ローラ33の表面に対して垂直となる、即ち、支持ローラ33の外周面を撮像することができるように配置され、該外周面に沿って搬送されるアンテナ回路101を撮像してその画像を処理して制御部Uへ入力するように構成されている。また、支持ローラ33のフィルム搬送方向上流側でCCDカメラCa1よりも少し下流側には、搬送されるアンテナ回路101の位置に合わせて接着剤を塗布する接着剤供給手段9が設けられている。
【0022】
同期ローラ31は、同期ローラ駆動手段32である駆動モータにより支持ローラ33の回転速度と同期する速度で横軸回りに(図2では反時計回りR22)間欠的に駆動される。同期ローラ31は、その外周面が支持ローラ33の外周面と対向するよう配置されている。換言すれば、支持ローラ33と同期ローラ31とが、円筒面同士で対向配置されている。また、支持ローラ33は、同期ローラ31よりも大径に構成されている。
【0023】
同期ローラ31の外周面には、軸方向に一列で周方向一定間隔置きに、ICチップChを保持する吸着ノズル331が設けられている。吸着ノズル331は、同期ローラ31の外周面からわずかに突出する突起状に形成されている。各吸着ノズル331の中心には、ICチップChを吸引保持するための吸着孔331aが形成されている。同期ローラ31は、同期ローラ駆動手段32の駆動による回転(回転方向R22)に伴って、各吸着ノズル331が、リニアフィーダ30Bの搬送面の下流端部まで搬送されてきたICチップChを一個ずつ吸引し、その吸引力によって保持するように構成されている。吸着ノズル331に吸着されたICチップChは、同期ローラ31の上流側の上方に配置されたCCDカメラCa2により撮像され、その姿勢が確認される。
【0024】
同期ローラ31は、吸着ノズル331が、フィルム10上のICチップChの搭載位置(アンテナ回路101に対してICチップChが電気接続される位置)に対応する位置、つまり、アンテナ回路101に対してICチップChを搭載するICチップ搭載位置まで回転すると、吸着孔331a内が大気圧となって、それまで吸引力(負圧)によって保持していたICチップChの吸引力が開放され、ICチップChが吸着ノズル331から離脱してフィルム10(アンテナ回路101)に搭載される構成になっている。尚、ここでは、ICチップChを搭載する位置であるICチップ搭載位置は、吸着ノズル331が最下位置に到着した位置としており、吸着孔331a内が大気圧となるのは、その僅かに手前になるように構成されている。
【0025】
保護紙搬送手段4は、ICチップChが実装されたフィルム体10Bを被覆する保護紙11を供給してフィルム体10Bに重ねる手段である。接着剤キュア手段5は、加熱により接着剤を硬化させる手段である。
【0026】
保護紙巻取手段6は、フィルム体10Bに重ねた保護紙11を剥がして巻き取る手段である。テスト手段7は、フィルム体10Bに所定の回路が構成されているかどうかを検査する手段である。巻取手段8は、フィルム体10Bをロール状に巻き取る手段である。
【0027】
上記構成の製造装置1においては、アンテナ回路101が形成されたフィルム10を巻き取ったロール10Aを搬送手段2により回転させ、ロール10Aから送り出されるフィルム10のアンテナ回路101上に接着剤供給手段9によって接着剤が塗布される。そして、接着剤が塗布されたアンテナ回路101上にICチップ供給手段3によりICチップChが供給されて搭載(実装)される。続いて、ICチップChが搭載されたフィルム体10Bに、保護紙搬送手段4により保護紙11を送り出して重ねるように被覆し、接着剤キュア手段5によりフィルム体10Bを加熱して接着剤G(図2参照)を硬化させる。保護紙11は、保護紙巻取手段6により巻き取られることでフィルム体10Bから巻き取って外される。次に、テスト手段7でフィルム体10Bに所定の回路が構成されているかどうかを検査し、巻取手段8によりICチップChが実装されたフィルム体10Bがロール状に巻き取られ、ICチップ実装体が連続して巻き取られたロールが製造される。
【0028】
次に、かかる製造装置1の制御部Uについて説明する。該制御部Uは、前述したように各種の手段2〜9を制御する他、同期ローラ31の回転を制御することができるように構成されている。図3に示すように、制御部Uには、支持ローラ33の単位時間当たりの回転量である単位回転量を支持ローラ33の外周面を観察して検出する検出手段12と、支持ローラ33が所定回転(例えば、一回転や二回転、半回転などが例示できるが、ここでは一回転とする)する毎に信号を出力する出力手段16とが、ハードウェア構成部品として接続されている。これら検出手段12及び出力手段16からの出力される信号が入力される制御部Uは、支持ローラ33の正規回転量に対する回転量の誤差に関する関数を用いて単位回転量に応じた誤差を割り出す割出手段13と、割出手段13により割り出した誤差と支持ローラ33の外周面上の前記検出手段12で観察される観察対象位置がICチップ搭載位置まで移動する際の正規回転量とから支持ローラ33の実際の回転量を求める回転量求め手段14と、回転量求め手段14により求められた実際の回転量に基づいて同期ローラ31の回転を制御する回転制御手段15とを備えている。
【0029】
尚、回転量とは、支持ローラ33の外周面上の一点が、該支持ローラ33の回転に伴って周方向に移動する外周長さのことである。また、正規回転量とは、支持ローラ33が真円度のバラツキ(形状誤差)や設置位置のバラツキ(偏芯)などが無い理想的な構成であることを前提とし、その支持ローラ33の外周面上の一点が、理想的な移動軌跡(理論上の移動軌跡)を辿った場合の外周長さのことである。更に、支持ローラ33の正規回転量に対する回転量の誤差とは、支持ローラ33の正規回転量(正規の外周長さ)と、支持ローラ33の実質的な回転ずれ量、換言すると実測の回転量(実測の外周長さ)との差(誤差回転量)のことである。更に、回転量求め手段14が求める支持ローラ33の実際の回転量とは、検出手段12が観察した観察対象位置である支持ローラ33の外周面上の一点が、その観察対象位置からICチップ搭載位置まで実際に移動するであろう外周長さ(実際の外周長さ)のことである。
【0030】
検出手段12は、前記CCDカメラCa1からなり、該CCDカメラCa1により支持ローラ33の外周面上を搬送されるフィルム10上の複数のアンテナ回路101を、CCDカメラCa1の撮像範囲を通過する順に撮像するように構成されている。そして、検出手段12は、先に撮像された画像からアンテナ回路101の位置を計測し、次に撮像されたアンテナ回路101との間のピッチを単位回転量として計測するように構成されている。これら順次計測されたアンテナ回路101の位置及びアンテナ回路101,101間のピッチは、制御部Uに記憶される。
【0031】
割出手段13は、支持ローラ33の正規回転量に対する回転量の誤差に関する関数から誤差(誤差回転量)を割り出す手段である。割出手段13で用いる関数は、実際に支持ローラ33を所定角度回転させたときの実測した回転量と、形状(真円度)や設置位置に誤差を含まない理想的な支持ローラ33を所定角度回転させたときの正規の回転量との間の誤差を求め、そのデータをプロットすることにより得られる周期的に変化するサインカーブのグラフ(図5参照)、或いは、それらのデータを表にしたテーブルである。かかる関数は、図3に示すように制御部Uの誤差記憶手段131に記憶されている。そして、割出手段13は、誤差記憶手段131に記憶されている関数を読み出して、検出手段12で検出した単位回転量に応じた誤差を割り出す。尚、図5のグラフは、縦軸に誤差回転量(誤差)を取り、横軸に支持ローラ33の回転量を取った周期的に誤差回転量が変化する曲線状のグラフである。割出手段13は、このグラフと前記検出手段12により検出されたアンテナ回路101の位置とピッチ(単位回転量)とを用いることによって、検出した単位回転量に応じた誤差(誤差回転量)を割出すことができる。例えば、所定位置のアンテナ回路101(P1)と次のアンテナ回路101(P2)との間のピッチ(単位回転量)が検出手段12で検出されると、P1の位置から横軸(回転量軸)に沿って単位回転量の分だけ移動し、その位置での誤差回転量を読み出すことで、検出した単位回転量に応じた誤差回転量を割り出すことができる。尚、図5では、関数として、最大値がプラスaで、最小値がマイナスaの値のサインカーブのグラフを示しているが、このグラフに限定されるものではなく、例えば、周期的でない曲線のグラフでもよい。
【0032】
また、割出手段13は、前記出力手段16から信号が出力されると、前記関数(グラフ)を用いて誤差を割り出すための回転量を周期の開始時点の回転量に合わせるよう、構成されている。具体的には、支持ローラ33が一回転したことを示す信号が出力手段16としての原点センサ(例えばフォトセンサ等)から出力され、その信号を割出手段13が受信すると、該割出手段13は、次に検出された単位回転量を、関数の周期の初期時点(図5では、回転量の横軸の原点近傍)に合わせて、それを基準に誤差を割り出す。換言すると、割出手段13は、前記信号を受信すると、横軸(回転量軸)の位相を初期化(リセット)し、それを基準に次の割出を行うように構成されている。
【0033】
回転量求め手段14は、割出手段13により割り出された誤差の回転量を支持ローラ33の正規回転量に加えることにより、支持ローラ33の実際の回転量を求める手段である。従って、前記のようにグラフにおいて所定番目のアンテナ回路101の位置(支持ローラ33の回転量)に対する誤差回転量(誤差)を読み出し、その読み出した誤差を支持ローラ33の正規回転量に加えることによって、実際の回転量を求めることができる。
【0034】
回転制御手段15は、同期ローラ31を回転開始させるタイミングを、回転量求め手段14により求められた実際の回転量に基づいて調整することによって、同期ローラ31の回転を制御する手段であり、例えば、求められた実際の回転量が正規の回転量よりも小さい場合には、検出手段12の観察対象位置(撮像位置)からICチッブ搭載位置までアンテナ回路101が移動する時間が正規の時間よりも長くなるので、同期ローラ31の回転開始タイミングを正規のタイミングよりも遅くする。また、求められた実際の回転量が正規の回転量よりも大きい場合には、検出手段12の観察対象位置(撮像位置)からICチッブ搭載位置までアンテナ回路101が移動する時間が正規の時間よりも短くなるので、同期ローラ31の回転開始タイミングを正規のタイミングよりも速くする。このように同期ローラ31を回転開始させるタイミングを調整することによって、ICチッブ搭載位置において、ICチッブChをアンテナ回路101に確実に搭載(実装)することができる。
【0035】
前記制御部Uにより同期ローラ31の回転制御について、図4のフローチャートに基づいて説明する。まず、検出手段12は、支持ローラ33の単位時間当たりの回転量である単位回転量を該支持ローラ33の外周面を観察して検出する(ステップS1)。具体的には、検出手段12としての撮像手段であるCCDカメラCa1が、支持ローラ33の外周面上を順次搬送されるアンテナ回路101を搬送順に撮像(観察)し、該撮像したデータを処理してアンテナ回路101のピッチを導出し、該アンテナ回路101のピッチを支持ローラ33の回転量に変換して単位回転量を算出(検出)する。
【0036】
そして、検出手段12が単位回転量を検出すると、それを受信した割出手段13は、支持ローラ33の正規回転量に対する回転量の誤差に関する関数を用いて、前記検出した単位回転量に応じた誤差(誤差回転量)を割り出す(ステップS2)。具体的には、割出手段13は、単位回転量を受信すると、誤差記憶手段131から前記関数を読み出し、該関数に前記単位回転量を組み込んで該単位回転量に対する誤差(誤差回転量)を割り出す。尚、関数が、図5に示すグラフである場合には、単位回転量を横軸にプロットして該横軸上の位置を決定し、該位置における誤差(縦軸の値)を読み取ることで割り出しを行う。また、関数がテーブルである場合には、該テーブルから単位回転量に対応した誤差を読み出すことで割り出しを行う。尚、関数が回転量を変数とする誤差(誤差回転量)の数式である場合には、検出した単位回転量を数式に代入して誤差を算出することで割り出しを行う。
【0037】
そして、割出手段13が誤差(誤差回転量)を割り出すと、回転量求め手段14は、支持ローラ33の外周面上における検出手段12によって撮像(観察)された観察対象位置(撮像位置)がICチップ搭載位置まで回転移動する際の正規回転量と、割出手段13により割り出した誤差とから、支持ローラ33の外周面上における前記撮像位置がICチップ搭載位置まで回転移動する際の実際の回転量を求める(ステップS3)。具体的には、回転量求め手段14は、割出手段13で割り出した誤差を前記正規回転量に加えて前記実際の回転量を算出する。
【0038】
そして、回転量求め手段14が支持ローラ33の実際の回転量を求めると、回転制御手段15は、該実際の回転量に基づいて同期ローラ31の回転を制御する(ステップS4)。具体的には、回転制御手段15は、実際の回転量と正規の回転量とを比較し、実際の回転量が正規の回転量よりも小さい場合には、同期ローラ31の回転開始タイミングが正規のタイミングよりも遅くなるように同期ローラ駆動手段32を制御し、実際の回転量が正規の回転量よりも大きい場合には、同期ローラ31の回転開始タイミングが正規のタイミングよりも速くなるように同期ローラ駆動手段32を制御する。このように、回転量求め手段14が求めた実際の回転量に基づいて同期ローラ31の回転制御(開始タイミング制御)を行うことによって、ICチップChを精度よくアンテナ回路101に実装することができる。
【0039】
そして、上記フローに基づく同期ローラ31の回転制御は、該制御中に支持ローラ33の回転が終了かどうかを確認し(ステップS5)、回転が終了されるまで続けられる。
【0040】
そして、支持ローラ33の回転が終了していないと制御部Uが判断すると、該制御部Uは、支持ローラ33が一回転したかどうかを出力手段16からの信号に基づいて判断する(ステップS6)。具体的には、制御部Uは、出力手段16としての原点センサが、支持ローラ33の回転原点を検出して原点信号(支持ローラ33が一回転したことを示す信号)を出力すると、一回転したと判断する。
【0041】
そして、制御部Uは、支持ローラ33が一回転していないと判断した場合には(ステップS6でNoの場合)、ステップS1乃至S5の制御を続行する。一方、支持ローラ33が一回転したと判断した場合には(ステップS6でYesの場合)、前記制御をリセットすべく回転量の位置合わせを行って(ステップS7)ステップS2に戻る。具体的には、割出手段13は、出力手段16から出力された信号を受信すると、支持ローラ33が一回転したと判断して、関数を用いて誤差を割り出すための回転量を、該関数の周期の開始時点の回転量に合わせる。より詳細には、割出手段13は、出力手段16からの信号を受信した後に検出された単位回転量を、関数の周期の初期時点(図5では、回転量の横軸の原点近傍)に合わせて該関数に組み込む。
【0042】
換言すると、ステップS7の処理は、誤差を求めるために用いる単位回転量(アンテナ回路101のピッチ)についての支持ローラ33の回転に対する位相を、該支持ローラ33が一回転する毎に、回転原点に合わせて初期化する処理である。要するに、本実施形態における割出手段13は、先に割り出した誤差(誤差回転量)に対応した回転量に、次に検出された単位回転量を累積することで、該次に検出された単位回転量に応じた誤差回転量を割り出すように構成されているから、誤差回転量を割り出すための回転量は、支持ローラ33の回転が進む(多くなる)につれて累積されていくこととなるところ、ステップS7では、支持ローラ33が一回転する毎に前記累積をリセット(初期化)する処理を行う。
【0043】
ここで、前記回転量の位置合わせを行う理由について説明する。本実施形態のように支持ローラ33でフィルム10を支持する構成を採用した場合には、フィルム10が支持ローラ33に対してスリップしたり、フィルム10が搬送中に伸び縮みしたりすることにより、支持ローラ33の回転量とフィルム10の搬送量との間に差が生じてしまうことがある。このような差が発生してしまうと、前記のようにアンテナ回路101のピッチから支持ローラ33の回転量を検出している構成では、検出手段12で検出される単位回転量の値、及び該割出手段13で単位回転量を用いて割り出される誤差(誤差回転量)に、前記差に応じた誤差(スリップ誤差)が含まれてしまうこととなる。そうすると、支持ローラ33の実際の回転量にも前記スリップ誤差が含まれることとなり、結果的に、回転制御手段15による同期ローラ31の回転制御が不正確となってICチップの実装精度が悪化してしまう。
【0044】
また、支持ローラ33の回転量とフィルム10の搬送量との間に生じる前記差は、支持ローラ33の回転が進むにつれて累積されて大きくなるから、支持ローラ33の回転数が多くなるほど単位回転量に含まれるスリップ誤差は大きくなる。一方、図5に示す、支持ローラ33の回転量の誤差(誤差回転量)についての関数は一定周期である。従って、支持ローラ33の回転数が多くなるほど、必然的にスリップ誤差が累積されて大きくなり、その結果、割出手段13で割り出される誤差回転量が不正確なものとなって、一層実装精度が悪化してしまう。
【0045】
かかるスリップ誤差による問題を、図5を用いて更に説明すると、前記スリップ誤差が発生すると、割出手段13では、本来は図5におけるf点における誤差回転量(零)が読み出されるべきであるところ、スリップ誤差eの分だけずれたg点における誤差回転量(+a1)が誤って読み出されてしまい(ステップS2)、読み出された(割り出された)誤差回転量には、+a1のスリップ誤差が含まれることとなる。続いて、かかるスリップ誤差を含んだ誤差回転量に基づいて実際の回転量が求められるから(ステップS3)、求められる実際の回転量にもスリップ誤差が含まれてしまう。そうすると、スリップ誤差を含んだ実際の回転量に基づいて同期ローラ31の回転が制御されるから(ステップS4)、結果的にICチップの実装精度が悪化してしまう。
【0046】
このようなスリップ誤差に基づく実装精度悪化の問題に鑑みて、前記回転量の位置合わせ処理(ステップS7の処理)を行うのである。即ち、支持ローラ33が一回転する毎に出力される信号により、誤差回転量を求めるために用いる関数に組み込む回転量を、該関数の周期の開始時点の回転量に合わせることで、一回転後に検出される単位回転量を、関数の周期の開始時点に合わせて組み込むことができ、該単位回転量に応じた誤差回転量を比較的正確に割り出すことができる結果、ICチップの実装精度が悪化することを抑制することができる。
【0047】
尚、本発明は、前記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々の変更が可能である。
【0048】
前記実施形態では、検出手段16としてフォトセンサを用いたが、各種の非接触式センサの他、リミットセンサなどの接触式センサを用いてもよい。
【0049】
また、前記実施形態では、支持ローラ33が一回転したことを示す出力手段16からの出力信号により、前記回転量の位置合わせ処理(ステップS7の処理)を行う場合について説明したが、これに限らず、出力手段16を省略して前記回転量の位置合わせ処理を行わない構成であってもよい。
【0050】
また、前記実施形態では、関数を割出手段13とは別の誤差記憶手段131に記憶させた場合について説明したが(図3参照)、割出手段13にグラフなどの関数を記憶させてもよい。尚、関数で求めるべき誤差は、支持ローラ33の真円度のバラツキ度合いや支持ローラ33の設置位置の偏芯度合いにより異なるため、図5に示したサインカーブのような曲線になるとは限らない。また、その他の要因で周期的にならない場合もある。
【0051】
また、前記実施形態では、CCDカメラCa1によりフィルム10のアンテナ回路101のピッチから支持ローラ33の単位回転量を検出する場合について説明したが、例えば、光学式ロータリエンコーダにより支持ローラ33の回転量を直接計測してもよい。この場合には、光学式ロータリエンコーダにより支持ローラ33が一回転する毎に信号を出力する出力手段16を兼用構成することができる。この光学式ロータリエンコーダは、外周面に等間隔で多数のスリットが形成され、支持ローラ33と一体回転する回転体と、回転体の表面に光を照射して跳ね返ってきた光を受光する光センサとから構成され、回転している回転体に光センサから光を当てて回転体のスリット間の部分に跳ね返ってきた光の数に基づいて、支持ローラ33の回転量を計測するように構成される。
【0052】
また、前記実施形態では、回転制御手段15が、同期ローラ31の回転開始タイミングを調整する手段であったが、同期ローラ31の回転開始タイミングは同一にした状態で同期ローラ31の回転加速度や回転速度を実際の支持ローラ33の回転量に合わせて調整する手段であってもよい。
【0053】
また、前記実施形態では、検出手段Ca1によりアンテナ回路101を直接検出して位置やピッチを把握するようにしたが、例えばフィルム10のアンテナ回路101に対応する部分にマークを付し、そのマークを検出してアンテナ回路101の位置やピッチを間接的には把握するようにしてもよい。
【0054】
また、前記実施形態において、CCDカメラを用いて搬送途中のフィルム上のアンテナ回路を撮像してその位置を計測し、該計測位置とアンテナ回路が前記撮像時点で本来位置すべき正規の位置との差から位置補正量を求め、この位置補正量に基づいて同期ローラの位置を補正すべく該同期ローラを位置制御するように構成することも可能である。この構成によれば、CCDカメラでの撮像時点(ICチップ搭載位置よりも搬送方向上流側に位置する撮像位置)におけるアンテナ回路の位置ずれに対応して同期ローラの位置を補正することができるため、ICチップを前記位置補正量を加味した位置でアンテナ回路に搭載することができる。
【符号の説明】
【0055】
1…製造装置、2…搬送手段、3…チップ供給手段、4…保護紙搬送手段、5…接着剤キュア手段、6…保護紙巻取手段、7…テスト手段、8…巻取手段、9…接着剤供給手段、10…フィルム、10A…ロール、10B…フィルム体、11…保護紙、12…検出手段、13…割出手段、14…回転量求め手段、15…回転制御手段、16…出力手段、30…パーツフィーダ、30A…ボウルフィーダー、30B…リニアフィーダ、31…同期ローラ、32…同期ローラ駆動手段、33…支持ローラ、34,35…押圧ローラ、36…支持ローラ駆動手段、101…アンテナ回路、121…ピッチ計測手段、122…回転量換算手段、131…誤差記憶手段、331…吸着ノズル、331a…吸着孔、Ca1…CCDカメラ、Ca2…CCDカメラ、Ch…チップ、G…接着剤、U…制御部
【特許請求の範囲】
【請求項1】
アンテナ回路が間隔を置いて複数設けられたフィルムを所定の方向に搬送する搬送手段と、該搬送手段による搬送途中のICチップ搭載位置で前記アンテナ回路にICチップを搭載する回転自在な同期ローラと、前記フィルムを下面側から支持しつつ回転する支持ローラとを備えているICチップ実装体の製造装置であって、
前記支持ローラの単位時間当たりの回転量である単位回転量を該支持ローラの外周面を観察して検出する検出手段と、前記支持ローラの正規回転量に対する回転量の誤差に関する関数を用いて前記検出した単位回転量に応じた誤差を割り出す割出手段と、前記支持ローラの外周面上における前記検出手段で観察される観察対象位置がICチップ搭載位置まで回転移動する際の正規回転量及び前記割出手段により割り出した誤差から、前記支持ローラの外周面上における前記観察対象位置がICチップ搭載位置まで回転移動する際の実際の回転量を求める回転量求め手段と、該回転量求め手段により求められた実際の回転量に基づいて前記同期ローラの回転を制御する回転制御手段とを備えていることを特徴とするICチップ実装体の製造装置。
【請求項2】
前記支持ローラが所定回転する毎に信号を出力する出力手段を更に備え、
前記検出手段は、支持ローラの外周面上を搬送される前記アンテナ回路のピッチから単位回転量を検出するよう構成され、
前記割出手段が用いる関数は、誤差が前記支持ローラの回転量に応じて周期的に変化する関数であり、
前記割出手段は、前記出力手段からの信号を受信すると、関数を用いて誤差を割り出すための回転量を、前記関数の周期の開始時点における回転量に合わせることを特徴とする請求項1に記載のICチップ実装体の製造装置。
【請求項1】
アンテナ回路が間隔を置いて複数設けられたフィルムを所定の方向に搬送する搬送手段と、該搬送手段による搬送途中のICチップ搭載位置で前記アンテナ回路にICチップを搭載する回転自在な同期ローラと、前記フィルムを下面側から支持しつつ回転する支持ローラとを備えているICチップ実装体の製造装置であって、
前記支持ローラの単位時間当たりの回転量である単位回転量を該支持ローラの外周面を観察して検出する検出手段と、前記支持ローラの正規回転量に対する回転量の誤差に関する関数を用いて前記検出した単位回転量に応じた誤差を割り出す割出手段と、前記支持ローラの外周面上における前記検出手段で観察される観察対象位置がICチップ搭載位置まで回転移動する際の正規回転量及び前記割出手段により割り出した誤差から、前記支持ローラの外周面上における前記観察対象位置がICチップ搭載位置まで回転移動する際の実際の回転量を求める回転量求め手段と、該回転量求め手段により求められた実際の回転量に基づいて前記同期ローラの回転を制御する回転制御手段とを備えていることを特徴とするICチップ実装体の製造装置。
【請求項2】
前記支持ローラが所定回転する毎に信号を出力する出力手段を更に備え、
前記検出手段は、支持ローラの外周面上を搬送される前記アンテナ回路のピッチから単位回転量を検出するよう構成され、
前記割出手段が用いる関数は、誤差が前記支持ローラの回転量に応じて周期的に変化する関数であり、
前記割出手段は、前記出力手段からの信号を受信すると、関数を用いて誤差を割り出すための回転量を、前記関数の周期の開始時点における回転量に合わせることを特徴とする請求項1に記載のICチップ実装体の製造装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−80795(P2013−80795A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−219526(P2011−219526)
【出願日】平成23年10月3日(2011.10.3)
【出願人】(000002059)シンフォニアテクノロジー株式会社 (1,111)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年10月3日(2011.10.3)
【出願人】(000002059)シンフォニアテクノロジー株式会社 (1,111)
【Fターム(参考)】
[ Back to top ]