
IC出力ポート切換制御装置
【課題】電源を省電力化することができるIC出力ポート制御装置を提供する。
【解決手段】ワイヤレスキーシステムの照合ECU4は、自身のメモリに記憶されたプログラムにて所定周期で動作するソフトウェア制御部19と、自身に元から備わるPWMリソースとを有する。照合ECU4のスリープ中、車両受信機が受信待機動作をとるパルスP4の1周期前のパルスP3で電源ポート11をソフトウェア制御からPWM制御に変更することにより、電源ポート11をPWM制御に切り換える。このため、PWM制御のパルスPxがHiレベルに立ち上がってからの時間が電源安定待ち時間Tsとして車両受信機に供給される。
【解決手段】ワイヤレスキーシステムの照合ECU4は、自身のメモリに記憶されたプログラムにて所定周期で動作するソフトウェア制御部19と、自身に元から備わるPWMリソースとを有する。照合ECU4のスリープ中、車両受信機が受信待機動作をとるパルスP4の1周期前のパルスP3で電源ポート11をソフトウェア制御からPWM制御に変更することにより、電源ポート11をPWM制御に切り換える。このため、PWM制御のパルスPxがHiレベルに立ち上がってからの時間が電源安定待ち時間Tsとして車両受信機に供給される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ICの出力ポートを制御するIC出力ポート切換制御装置に関する。
【背景技術】
【0002】
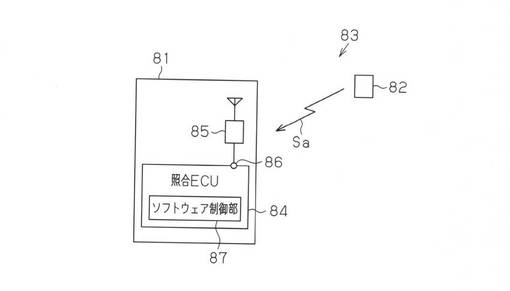
従来、図5に示すように、車両81には、電子キー82から無線により送信されるIDコードにてキー照合を行う電子キーシステム83が搭載されている。この電子キーシステム83には、電子キー82のIDコードをID照合する照合ECU84と、電子キー82から送信されるID信号Saを受信可能な車両受信機85とが設けられている。車両受信機85は、照合ECU84の電源ポート86に接続され、この電源ポート86から電源が供給されている。照合ECU84は、車両受信機85でID信号Saを受信すると、ID照合を実行し、ID照合の成立を確認すると、例えば車両ドアの施解錠やエンジン始動を許可/実行する。
【0003】
ところで、一般的に、この種の照合ECU84は、図6に示すように、常時、ウェイク動作をとっている訳ではなく、一定時間動作しない状態をとると、待機電力(電源)を省電力化するために、スリープ動作に移行し、次の動作まで待機する。これにより、照合ECU84に常に電力を供給する必要がなくなるので、照合ECU84に消費される電力が低く抑えられ、電源電力の有効利用に効果が高くなる。
【0004】
但し、照合ECU84は、スリープ動作中、最低限の動作を実施させる必要があり、この動作は、照合ECU84内のソフトウェア制御部87が担っている。ソフトウェア制御部87は、照合ECU84内のメモリ(図示略)に書き込まれたプログラム(アプリケーション)に基づき動作する機能部であって、所定の周期間隔(例えば20mS間隔)で間欠的にアクティブ動作し、スリープ動作中において照合ECU84にて最低限実施すべき動作を繰り返し実行する。
【0005】
また、車両受信機85は、いつ電子キー82からID信号Saが送信されても対応できるように、所定の周期間隔(例えば200mS間隔)にて定期的に電波受信を監視するポーリング動作を実施する必要がある(例えば特許文献1等参照)。このため、照合ECU84は、スリープ動作中、ソフトウェア制御部87の動作周期において、ポーリング周期に応じたタイミングで電源ポート86から車両受信機85に電源を供給し、車両受信機85を起動させる動きをとる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−235668号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
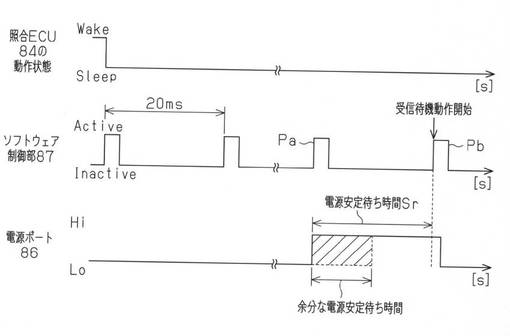
ところで、電源供給された車両受信機85において、電波の受信動作を行う前には、供給された電源が安定するのに必要な時間、いわゆる電源安定待ち時間Srが必要である。よって、照合ECU84は、スリープ中のポーリング動作の際、車両受信機85において電波受信できる状態の電波待機動作の開始に先立ち、電源ポート86から車両受信機85への電源供給を先行して開始する必要がある。ちなみに、電源安定待ち時間Srは、一般の車両受信機85であれば、例えば10mS程度で足りる。
【0008】
しかし、照合ECU84がスリープ中のとき、電源ポート86はソフトウェア制御部87の動作周期でしか制御できないので、電源安定を考慮に入れた電源供給を開始する場合、受信待機動作を開始させるパルスPbの1つ前の周期のパルスPaから電源供給を開始する必要がある。通常、ソフトウェア制御部87の動作周期は20mSであるので、結果として、電源暗転待ち時間Srが20mSとなってしまい、本来ならば10mSで済むところ、電源安定待ち時間Srを20mSもとらざるを得ない現状があった。従って、暗電流が増加し、電源の省電力化に支障を来す問題があった。
【0009】
本発明の目的は、電源を省電力化することができるIC出力ポート制御装置を提供することにある。
【課題を解決するための手段】
【0010】
前記問題点を解決するために、本発明では、IC内部のソフトウェア制御部が特定の動作周期で繰り返し起動することで動作し、ウェイク中には前記ソフトウェア制御部が高い周期で動作し、スリープ中には当該ソフトウェア制御部が低い周期で動作し、該ソフトウェア制御部の動作周期から決まる定期的な周期にて出力ポートから信号を出力して、電装品を動作可能なIC出力ポート切換制御装置において、他の電装品をPWM制御によって動作させるPWM制御部と、前記スリープ中、前記出力ポートを前記ソフトウェア制御部から前記PWM制御部に接続を切り換えて、当該PWM制御部によって前記出力ポートを制御することにより、前記電装品を前記PWM制御にて動作可能とする切換手段とを備えたことを要旨とする。
【0011】
本発明の構成によれば、ICは、内部のソフトウェア制御部が所定の動作周期で起動することによって動作し、ウェイク時には高い周期で動作し、スリープ時には待機電力削減を目的に低い周期で動作する。また、ICは、ソフトウェア制御部の動作周期から決まる定期的な周期で出力ポートから電装品に信号を出力して、電装品を動作させる。即ち、電装品は、ICの出力ポートから定期的な周期で出力される信号にて、特定の周期で起動/動作する。
【0012】
また、本発明の場合、ICのスリープ中、出力ポートがソフトウェア制御からPWM制御に切り換えられるので、電装品をPWM制御のパルス立ち上がりにて動作させることが可能となる。このため、スリープ時においてソフトウェア制御部が低い周期、つまり遅い動作をとる場合であっても、ソフトウェア制御の周期間隔によらず、PWM制御のパルスにて電装品を動作させることが可能となるので、出力ポートから電装品への信号供給の最適化が可能となる。よって、出力ポートから電装品に無駄に信号を流さずに済むので、暗電流の削減、ひいては電源の省電力化に効果が高くなる。
【0013】
本発明では、前記出力ポートは、前記電装品に電源を供給する電源ポートであり、前記切換手段は、前記電源ポートをPWM制御に切り換えたとき、当該PWM制御にて出力されるパルスの立ち上がりによって前記電装品に電源供給を開始することにより、当該電装品の電源安定待ち時間を確保することを要旨とする。この構成によれば、電源ポートから電装品への電源供給を、PWM制御のパルス立ち上がりにて開始することが可能となるので、電源安定待ち時間を最適な時間に設定することが可能となる。このため、暗電流の削減、ひいては電源の省電力化に効果が高くなる。
【0014】
本発明では、前記電装品は、電子キーから送信されるID信号を車両において受信する車両受信機であることを要旨とする。この構成によれば、車両受信機に必要な電源安定待ち時間の最低化が可能となるので、車両受信機にかかる電力の省電力化が可能となる。
【0015】
本発明では、前記PWM制御の1周期は、前記スリープ中の前記ソフトウェア制御部の周期間隔よりも長く設定されていることを要旨とする。この構成によれば、出力ポートから電装品に電源供給を開始してから次のソフトウェア制御の周期が到来するまでの間、PWM制御のパルスが供給される状態となるので、電源供給が途中で途切れる可能性がない。
【0016】
本発明では、前記PWM制御のデューティ比は、前記電装品に付与したい電源安定待ち時間をとるように設定されていることを要旨とする。この構成によれば、PWM制御のデューティ比を調整するという簡素な処理によって、電源安定待ち時間を最適な時間に設定することが可能となる。
【発明の効果】
【0017】
本発明によれば、ICにおいて電源を省電力化することができる。
【図面の簡単な説明】
【0018】
【図1】一実施形態のワイヤレスキーシステムの構成図。
【図2】照合ECU、ソフトウェア制御部及び電源ポートの動作態様を示すタイミングチャート。
【図3】(a),(b)はPWM制御の制御内容を説明するタイミングチャート。
【図4】照合ECU、ソフトウェア制御部及び電源ポートの動作態様を示すタイミングチャート。
【図5】従来の電子キーシステムの構成図。
【図6】照合ECU、ソフトウェア制御部及び電源ポートの動作態様を示すタイミングチャート。
【発明を実施するための形態】
【0019】
以下、本発明を具体化したIC出力ポート切換制御装置の一実施形態を図1〜図4に従って説明する。
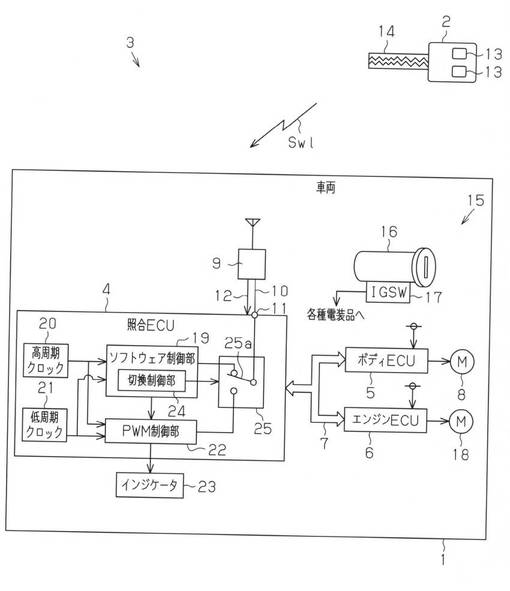
図1に示すように、車両1には、ワイヤレスキー2からの通信を契機にID照合を実行するワイヤレスキーシステム3が設けられている。ワイヤレスキーシステム3では、ワイヤレスキー2を用いた遠隔操作によって、車載機器を動作可能である。この車載機器には、例えばヒンジ回動ドア、スライドドア、ラッゲージドアなどがある。また、本例のワイヤレスキー2は、キー側での操作にてワイヤレス信号Swlを送信可能な電子キーの一種のことを言う。なお、ワイヤレスキー2が電子キーに相当し、ワイヤレス信号SwlがID信号に相当する。
【0020】
この場合、車両1には、ワイヤレスキー2の正当性を認証する照合ECU(Electronic Control Unit)4と、車両1の各種電装品の電源を管理するボディECU5と、エンジンを制御するエンジンECU6とが設けられ、これらが車内のバス7によって接続されている。照合ECU4のメモリ(図示略)には、車両1に登録されたワイヤレスキー2のIDコードが記憶されている。照合ECU4には、ドア施解錠の駆動源となるドアロックモータ8が接続されている。照合ECU4は、例えば1チップIC(Integrated Circuit)からなる。
【0021】
照合ECU4には、UHF(Ultra High Frequency)帯の電波を受信可能な車両受信機9が接続されている。車両受信機9は、電源線10を介して照合ECU4の電源ポート11に接続され、電源ポート11から電源が供給されている。また、照合ECU4は、データ線12を介して車両受信機9に接続され、このデータ線12を通じて車両受信機9から受信データ(IDコード等)が入力される。なお、車両受信機9が電装品に相当し、電源ポート11が出力ポートに相当する。
【0022】
ワイヤレスキー2には、遠隔操作する車載機器に応じたワイヤレスボタン13が設けられている。ワイヤレスボタン13が操作されると、ワイヤレスキー2からワイヤレス信号SwlがUHF電波により送信される。ワイヤレス信号Swlには、ワイヤレスキー2のIDコードと、操作されたワイヤレスボタン13に応じた機能コードとが含まれている。照合ECU4は、車両受信機9でワイヤレス信号Swlを受信すると、ワイヤレス信号Swl内のIDコードにてID照合(ワイヤレス照合)を行い、この照合が成立することを確認すると、同一信号内に含まれる機能コードに応じた車載機器を動作させる。
【0023】
車両1には、ワイヤレスキー2のキープレート14を用いた機械的操作によって車両1の電源状態を切り換えるメカニカルキーシステム15が設けられている。この場合、車両1の運転席には、正規のキープレート14による回動操作が可能なキーシリンダ16が設けられている。キーシリンダ16は、例えばIG(Ignition)オフ位置、ACC(Accessory)オン位置、IGオン位置、ST(Starter)オン位置の各位置に操作される。
【0024】
キーシリンダ16には、キーシリンダ16内のロータ(図示略)の各回動位置に応じてスイッチ状態が切り換わるイグニッションスイッチ17が設けられている。イグニッションスイッチ17は、例えばACCリレー、IGリレー及びSTリレーを有する。キーシリンダ16にワイヤレスキー2のキープレート14が挿し込まれて回し操作されると、イグニッションスイッチ17がキーシリンダ16の回動位置に応じたスイッチ状態に切り換わる。このとき、キーシリンダ16がST位置まで操作されると、スタータモータが回り、エンジン18が始動される。
【0025】
照合ECU4には、照合ECU4のメモリに書き込まれたプログラム(アプリケーション)に基づき各種動作を実行するソフトウェア制御部19が設けられている。ソフトウェア制御部19は、例えばワイヤレスキー2とのID照合や、照合成立下における各ECU5,6への動作指令出力などのソフトウェア制御を実行可能である。
【0026】
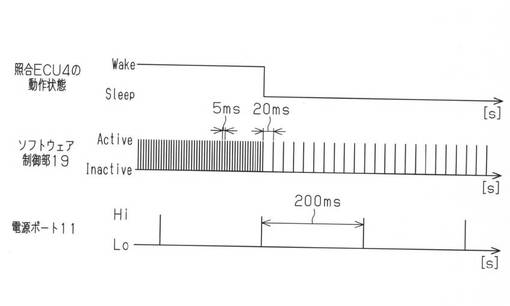
図2に示すように、照合ECU4は、通常、ウェイク動作をとっている。ウェイク動作中、ソフトウェア制御部19は、高周期クロック20から出力されるクロック信号を基に、高い周期(周期間隔:例えば5mS)で動作する。また、照合ECU4は、ウェイク動作中、一定時間動作しない状況が続くと、電源の省電力化のために、スリープ動作に切り換わり、次の動作まで待機する。スリープ動作中、照合ECU4は、内部のソフトウェア制御部19によって、所定周期で最小限のソフトウェア制御を実施する。スリープ動作中、ソフトウェア制御部19は、低周期クロック21から出力されるクロック信号を基に、低い周期(周期間隔:例えば20mS)で動作し、スリープ中に最低限実施すべき動作を繰り返し実行する。
【0027】
車両受信機9は、いつワイヤレスキー2からワイヤレス信号Swlが送信されても対応できるように、所定の周期間隔(例えば200mS間隔)にて定期的に電波受信を監視するポーリング動作によって、電波を探索する。よって、照合ECU4は、ソフトウェア制御部19の動作周期(起動周期)において、ポーリング周期に合わせた起動タイミングで電源ポート11から車両受信機9に電源を供給し、車両受信機9を定期的に起動させる。これにより、車両受信機9は、ポーリング周期にて受信待機動作をとり、ワイヤレス信号Swlを受信可能となる。
【0028】
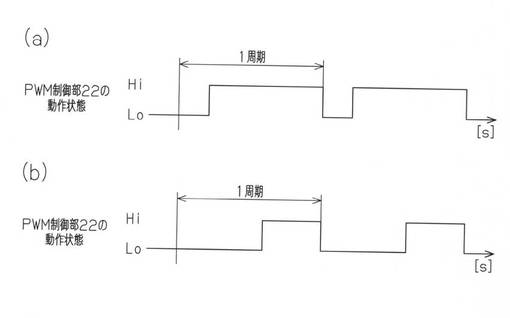
図1に示すように、照合ECU4には、PWM(Pulse Width Modulation)制御によって車載機器を制御するPWM制御部22が設けられている。本例のPWM制御部22は、元から照合ECU4に組み込まれた制御機能であって、車載機器として例えばキーシリンダ16の周囲に配設されたインジケータ23を点灯制御する。PWM制御部22は、照合ECU4がウェイク時、高周期クロック20で動作し、照合ECU4がスリープ時、低周期クロック21で動作する。インジケータ23は、PWM制御によって点灯/消灯が繰り返されているものの、高速の間欠駆動であるため人の目には点灯しているように見える。そして、図3(a)に示すようにPWMのデューティ比が高く設定されると、インジケータ23の輝度が高くなり、図3(b)に示すようにPWMのデューティ比が低く設定されると、インジケータ23の輝度が低くなる。なお、インジケータ23が他の電装品に相当する。
【0029】
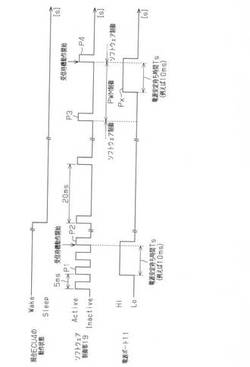
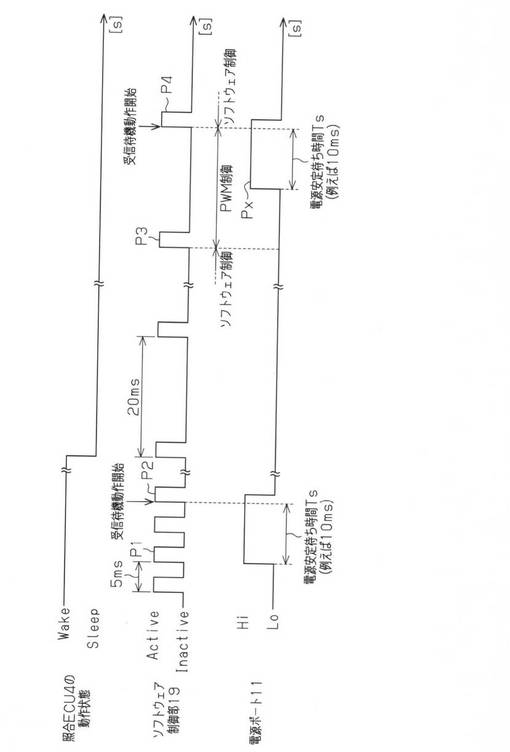
ところで、背景技術でも述べたように、一般的な車両受信機9では、電源投入後、電波受信可能となるまでに、受信準備動作として図4に示すような所定の電源安定待ち時間Tsが必要である。電源安定待ち時間Tsは、電源ポート11から車両受信機9に投入された電源が車両受信機9において安定するまでに要する時間であって、例えば約10mS程度必要である。このため、照合ECU4は、ソフトウェア制御において受信待機動作を開始するパルス(例えば、図4で示すP2,P4)の前段階で、電源ポート11から車両受信機9へ電源供給を開始する必要がある。
【0030】
ここで、照合ECU4がウェイク動作中のとき、ソフトウェア制御部19の動作周期は5mS周期と短いので、電源安定待ち時間Tsが10mS必要な場合でも、電源管理はソフトウェア制御で足りる。よって、ウェイク動作時、ソフトウェア制御部19は、ソフトウェア制御の動作周期において受信待機動作開始のパルスP2から2つ前の周期のパルスP1で、電源ポート11からの電源供給を開始する。これにより、電源ポート11から車両受信機9には、約10mSの電源安定待ち時間Tsが確保される。
【0031】
図4に示すように、本例の照合ECU4には、スリープ時において、照合ECU4のPWMリソース(PWM制御部22)を利用することにより、ソフトウェア制御を介すことなく車両受信機9の電源安定待ち時間Tsを確保するECU電源ポート制御機能が設けられている。PWM制御は、処理の途中でパルスPxが立ち上がる波形をとるので、このパルスPxの立ち上がりを利用して、車両受信機9への電源供給を開始する。本例のECU電源ポート制御機能は、スリープ時のソフトウェア制御における受信待機動作開始のパルスP4の1つ前の周期のパルスP3で、電源ポート11の制御をPWM制御に切り換え、PWM制御によって電源ポート11から車両受信機9に電源供給を行う。なお、パルスPxが電源供給用の信号に相当する。
【0032】
この場合、図1に示すように、照合ECU4内のソフトウェア制御部19には、ソフトウェア制御部19及びPWM制御部22と電源ポート11との接続状態を切り換える切換制御部24が設けられている。本例の切換制御部24は、ソフトウェア制御部19及びPWM制御部22と電源ポート11との間に設けられたスイッチ部25を制御することにより、ソフトウェア制御部19及びPWM制御部22の一方を、電源ポート11に選択的に接続する。スイッチ部25は、機能としてイメージできる部材であって、ソフトウェア制御部19及びPWM制御部22の一方を電源ポート11に選択接続可能となっていれば、必ずしも必要ではない。なお、切換制御部24及びスイッチ部25が切換手段を構成する。
【0033】
本例の切換制御部24は、スリープ時のソフトウェア制御における受信待機動作開始のパルスP4の1つ前の周期のパルスP3で、スイッチ部25の可動接点25aをソフトウェア制御部19側からPWM制御部22側に接続して、PWM制御部22を電源ポート11に接続する。これにより、車両受信機9への電源供給がPWM制御のパルスPxの立ち上がりから開始され、このパルス立ち上がりから受信待機動作開始のパルスP4までの時間が電源安定待ち時間Tsとして確保される。
【0034】
本例の場合、PWM制御の周期は、ソフトウェア制御部19の動作周期(本例は20mS)よりも長い値に設定されている。また、PWM制御のデューティ比は、車両受信機9への電源供給を開始したいタイミングに応じて設定される。例えば、電源供給開始タイミングを早めに設定したい場合は、デューティ比を高く設定し、電源供給開始タイミングを遅めに設定したい場合は、デューティ比を低く設定する。切換制御部24は、スイッチ部25をPWM制御部22側に接続した後、次に到来するソフトウェア制御の周期で、スイッチ部25を元のソフトウェア制御部19側に接続を戻す。
【0035】
次に、本例のECU電源ポート制御機能の動作を、図4を用いて説明する。
図4に示すように、照合ECU4がウェイク動作中、ソフトウェア制御部19は、高周期クロック20のクロック信号を基に、高い周期(5mS周期)でソフトウェア制御を実施している。このため、照合ECU4は、高速での動作が可能であり、種々の制御処理を短い時間にて実行可能である。
【0036】
また、通常、照合ECU4は、ソフトウェア制御の動作周期において、ポーリングの周期が到来すると、その度に車両受信機9に電源を投入して車両受信機9を受信待機状態にする動きをとる。即ち、照合ECU4は、ポーリング周期にて車両受信機9に電源を入れて定期的に受信待機状態にする。ウェイク動作時の照合ECU4は、ポーリング周期から決まる受信待機動作開始のパルスP2から2つ前のパルスP1で電源ポート11をLoレベルからHiレベルに引き上げ、車両受信機9への電源供給を開始する。よって、車両受信機9が受信待機状態をとり、ワイヤレス信号Swlの受信が可能となる。
【0037】
ここで、照合ECU4は、ウェイク動作中、一定時間動作しない状態、つまり車両受信機9で電波受信しない状態が一定時間継続すると、スリープ動作に移行する。照合ECU4がスリープ動作に移行すると、ソフトウェア制御部19は、低周期クロック21のクロック信号を基に、低い周期(20mS周期)でソフトウェア制御を実施する。即ち、スリープ中は、待機電力を少なく抑えるために、電力のかからない動作速度の遅い低周期クロック21でソフトウェア制御を行う。
【0038】
このスリープ動作時、切換制御部24は、ソフトウェア制御の動作周期において、ポーリング周期から決まる受信待機動作開始のパルスP4から1つ前のパルスP3のとき、スイッチ部25をそれまでのソフトウェア制御部19側からPWM制御部22側に接続し、PWM制御部22を電源ポート11に接続する。即ち、電源ポート11の制御を、それまでのソフトウェア制御からPWM制御に切り換える。
【0039】
よって、PWM制御部22は、PWM制御において立ち上がるパルスPxを、電源ポート11から車両受信機9の電源として供給する。即ち、PWM制御のパルスPxの立ち上がりにより、電源ポート11がLoレベルからHiレベルに引き上げられ、車両受信機9に電源供給が開始される。これにより、車両受信機9が受信準備動作をとり、PWM制御のパルスPxにおいてHiレベルとなっている時間が電源安定待ち時間Tsとなる。よって、電源安定待ち時間TsをPWM制御のデューティ比によって設定することが可能となるので、電源安定待ち時間Tsを電源安定に最低限必要な約10mSに設定することが可能となる。
【0040】
切換制御部24は、このPWM制御中、次のソフトウェア制御の周期が到来すると、スイッチ部25をPWM制御部22側からソフトウェア制御部19側に接続し、電源ポート11の制御をソフトウェア制御に戻す。よって、電源ポート11の管理がソフトウェア制御部19に戻され、今まで通りの電源管理が可能となる。
【0041】
以上により、本例においては、照合ECU4がスリープ動作をとる際、照合ECU4に元から備わるPWM制御部22を利用し、ソフトウェア制御部19を介さずに、車両受信機9への電源供給開始を可能とした。即ち、照合ECU4のスリープ動作時、ソフトウェア制御において受信待機動作を開始するパルスP4の1周期前で、電源ポート11をそれまでのソフトウェア制御からPWM制御に切り換え、PWM制御のデューティ比から決まるパルス立ち上がりのタイミングにて、車両受信機9への電源供給を開始する。
【0042】
このため、電源安定待ち時間Tsを最低限必要な時間にピンポイント設定することが可能となるので、従来に比較して電源安定待ち時間Tsを短縮することが可能となる。よって、無駄な電源安定待ち時間Tsを必要とすることに起因する暗電流が削減されるので、電源の省電力化に効果が高くなる。
【0043】
本実施形態の構成によれば、以下に記載の効果を得ることができる。
(1)照合ECU4のスリープ中、車両受信機9のポーリング周期で電源ポート11をソフトウェア制御部19からPWM制御部22に接続を切り換えることにより、電源ポート11をPWM制御にて制御する。このため、PWMリソースを用いて車両受信機9への電源供給を行うことが可能となるので、車両受信機9をPWM制御のパルスPxの立ち上がりにて電源供給することができる。よって、照合ECU4がスリープ時に低い周期で動作する場合であっても、ソフトウェア制御の周期間隔によらず、PWM制御のデューティ比にて車両受信機9への電源供給が可能となるので、電源ポート11から車両受信機9への電源供給の開始時期の最適化が可能となる。即ち、ソフトウェア制御の制御態様を変更することなく、電源安定待ち時間Tsを電源安定に最低限必要な10mSに設定することができる。従って、電源ポート11から車両受信機9に無駄に電源が流されずに済むので、暗電流を削減でき、ひいては電源を省電力化することができる。
【0044】
(2)電源安定待ち時間Tsを最適化(短縮化)する方法としては、例えばポーリングの周期ごとに、ソフトウェア制御の動作周期を電源安定待ち時間Tsとして最適の10mSに設定を切り換えることも可能である。しかし、この方法はソフトウェア制御部19に余分な処理を実施させる必要が生じ、暗電流削減の目的を果たせないことになる。また、ソフトウェア制御部19にとってはイレギュラーな処理を課すことにもなり、ソフトウェア制御が複雑になる問題に繋がる。それに対し、本例はこれら問題が発生しないという観点からしても、特に効果が高いと言える。
【0045】
(3)車両受信機9に必要な電源安定待ち時間Tsの最適化が可能となるので、車両受信機9にかかる電力を省電力化することができる。
(4)PWM制御の1周期は、スリープ時のソフトウェア制御の周期間隔(20mS)以上の値に設定される。このため、PWM制御によって電源ポート11から車両受信機9に電源供給を開始してから次に到来するソフトウェア制御の周期の間、PWM制御のパルスPxがHiレベルで維持されるので、電源供給が途中で途切れてしまうことがない。
【0046】
(5)PWM制御のデューティ比は、電源ポート11から車両受信機9への電源供給を開始したい比率に設定される。よって、PWM制御のデューティ比を調整するという簡素な処理によって、電源安定待ち時間Tsを最適な時間に設定することができる。
【0047】
なお、実施形態はこれまでに述べた構成に限らず、以下の態様に変更してもよい。
・PWM制御のデューティ比は、固定値であることに限定されない。例えば、PWM制御のデューティを変更可能とし、電源安定待ち時間Tsを任意に調整可能としてもよい。
【0048】
・ソフトウェア制御部19は、プログラムに基づき動作するものであれば、どのような処理を実施するものでもよい。
・車両受信機9は、UHF電波を受信可能な受信機に限定されず、例えばHF(High Frequency)等の他の周波数を受信する受信機でもよい。
【0049】
・実施形態に記載した各周期は、実施形態に述べた値に限定されず、他の値に適宜変更可能である。
・出力ポートは、電源ポート11に限定されず、信号を出力可能なポートであればよい。
【0050】
・電装品は、車両受信機9に限定されず、他の機器や装置に変更可能である。
・PWM制御される他の電装品は、インジケータ23に限定されず、他の機器や装置に変更可能である。
【0051】
・ICは、照合ECU4に限定されず、他のECUに変更可能である。
・ワイヤレスキーシステム3は、車両ドアの施解錠を遠隔操作するシステムに限定されず、車両ドア以外の機器を遠隔操作可能なシステムとしてもよい。
【0052】
・本例のECU電源ポート制御機能が適用される電子キーシステムは、ワイヤレスキーシステム3に限定されない。例えば、車両1からの通信を契機に狭域無線により電子キーとのID照合を行うキー操作フリーシステムでもよいし、或いは近距離無線によって電子キーとのID照合を行う近距離無線通信システムでもよい。
【0053】
・本例のECU電源ポート制御機能は、車両1の電子キーシステムに適用されず、他のシステムに応用可能である。また、車両1に適用されることにも限定されず、他の装置やシステムにも応用可能である。
【0054】
次に、上記実施形態及び別例から把握できる技術的思想について、それらの効果とともに以下に追記する。
(イ)請求項1〜5のいずれかにおいて、前記切換手段は、前記出力ポートをPWM制御に切り換えた後、前記PWM制御の1周期の処理が終了すると、前記出力ポートを前記PWM制御部から前記ソフトウェア制御部に接続を戻し、前記電装品を前記ソフトウェア制御にて動作させる。この構成によれば、出力ポートの制御を、最適なタイミングでPWM制御から元のソフトウェア制御に戻すことが可能となる。
【0055】
(ロ)請求項1〜5,前記技術的思想(イ)のいずれかにおいて、前記電装品は、電子キーから送信されるID信号を車両において受信する車両受信機であり、前記出力ポートは、前記車両受信機に電源を供給する電源ポートであり、前記切換手段は、前記電源ポートをPWM制御に切り換えたとき、当該PWM制御にて出力されるパルスの立ち上がりによって前記車両受信機に電源供給を開始することにより、当該車両受信機の電源待ち時間を確保し、電源安定後、前記電源ポートの接続を前記ソフトウェア制御部に戻すことにより、前記車両受信機を受信待機状態として、前記車両受信機での前記ID信号の受信を可能とする。
【0056】
(ハ)請求項1〜5,前記技術的思想(イ),(ロ)のいずれかにおいて、前記電装品は、電子キーから送信されるID信号を車両において受信する車両受信機であり、前記定期的な周期は、前記車両受信機を定期的に受信待機状態に切り換えるポーリングの周期である。この構成によれば、電子キーから送信電波をポーリング周期にて定期的に監視するので、いつ電子キーからID信号が送信されても、このID信号を車両受信機で受信することが可能となる。
【符号の説明】
【0057】
1…車両、2…電子キーとしてのワイヤレスキー、4…ICとしての照合ECU、9…電装品としての車両受信機、11…出力ポートとしての電源ポート、19…ソフトウェア制御部、22…PWM制御部、23…他の電装品としてのインジケータ、24…切換手段を構成する切換制御部、25…切換手段を構成するスイッチ部、Px…信号としての電源用のパルス、Ts…電源安定待ち時間、Sid…ID信号としてのワイヤレス信号。
【技術分野】
【0001】
本発明は、ICの出力ポートを制御するIC出力ポート切換制御装置に関する。
【背景技術】
【0002】
従来、図5に示すように、車両81には、電子キー82から無線により送信されるIDコードにてキー照合を行う電子キーシステム83が搭載されている。この電子キーシステム83には、電子キー82のIDコードをID照合する照合ECU84と、電子キー82から送信されるID信号Saを受信可能な車両受信機85とが設けられている。車両受信機85は、照合ECU84の電源ポート86に接続され、この電源ポート86から電源が供給されている。照合ECU84は、車両受信機85でID信号Saを受信すると、ID照合を実行し、ID照合の成立を確認すると、例えば車両ドアの施解錠やエンジン始動を許可/実行する。
【0003】
ところで、一般的に、この種の照合ECU84は、図6に示すように、常時、ウェイク動作をとっている訳ではなく、一定時間動作しない状態をとると、待機電力(電源)を省電力化するために、スリープ動作に移行し、次の動作まで待機する。これにより、照合ECU84に常に電力を供給する必要がなくなるので、照合ECU84に消費される電力が低く抑えられ、電源電力の有効利用に効果が高くなる。
【0004】
但し、照合ECU84は、スリープ動作中、最低限の動作を実施させる必要があり、この動作は、照合ECU84内のソフトウェア制御部87が担っている。ソフトウェア制御部87は、照合ECU84内のメモリ(図示略)に書き込まれたプログラム(アプリケーション)に基づき動作する機能部であって、所定の周期間隔(例えば20mS間隔)で間欠的にアクティブ動作し、スリープ動作中において照合ECU84にて最低限実施すべき動作を繰り返し実行する。
【0005】
また、車両受信機85は、いつ電子キー82からID信号Saが送信されても対応できるように、所定の周期間隔(例えば200mS間隔)にて定期的に電波受信を監視するポーリング動作を実施する必要がある(例えば特許文献1等参照)。このため、照合ECU84は、スリープ動作中、ソフトウェア制御部87の動作周期において、ポーリング周期に応じたタイミングで電源ポート86から車両受信機85に電源を供給し、車両受信機85を起動させる動きをとる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−235668号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、電源供給された車両受信機85において、電波の受信動作を行う前には、供給された電源が安定するのに必要な時間、いわゆる電源安定待ち時間Srが必要である。よって、照合ECU84は、スリープ中のポーリング動作の際、車両受信機85において電波受信できる状態の電波待機動作の開始に先立ち、電源ポート86から車両受信機85への電源供給を先行して開始する必要がある。ちなみに、電源安定待ち時間Srは、一般の車両受信機85であれば、例えば10mS程度で足りる。
【0008】
しかし、照合ECU84がスリープ中のとき、電源ポート86はソフトウェア制御部87の動作周期でしか制御できないので、電源安定を考慮に入れた電源供給を開始する場合、受信待機動作を開始させるパルスPbの1つ前の周期のパルスPaから電源供給を開始する必要がある。通常、ソフトウェア制御部87の動作周期は20mSであるので、結果として、電源暗転待ち時間Srが20mSとなってしまい、本来ならば10mSで済むところ、電源安定待ち時間Srを20mSもとらざるを得ない現状があった。従って、暗電流が増加し、電源の省電力化に支障を来す問題があった。
【0009】
本発明の目的は、電源を省電力化することができるIC出力ポート制御装置を提供することにある。
【課題を解決するための手段】
【0010】
前記問題点を解決するために、本発明では、IC内部のソフトウェア制御部が特定の動作周期で繰り返し起動することで動作し、ウェイク中には前記ソフトウェア制御部が高い周期で動作し、スリープ中には当該ソフトウェア制御部が低い周期で動作し、該ソフトウェア制御部の動作周期から決まる定期的な周期にて出力ポートから信号を出力して、電装品を動作可能なIC出力ポート切換制御装置において、他の電装品をPWM制御によって動作させるPWM制御部と、前記スリープ中、前記出力ポートを前記ソフトウェア制御部から前記PWM制御部に接続を切り換えて、当該PWM制御部によって前記出力ポートを制御することにより、前記電装品を前記PWM制御にて動作可能とする切換手段とを備えたことを要旨とする。
【0011】
本発明の構成によれば、ICは、内部のソフトウェア制御部が所定の動作周期で起動することによって動作し、ウェイク時には高い周期で動作し、スリープ時には待機電力削減を目的に低い周期で動作する。また、ICは、ソフトウェア制御部の動作周期から決まる定期的な周期で出力ポートから電装品に信号を出力して、電装品を動作させる。即ち、電装品は、ICの出力ポートから定期的な周期で出力される信号にて、特定の周期で起動/動作する。
【0012】
また、本発明の場合、ICのスリープ中、出力ポートがソフトウェア制御からPWM制御に切り換えられるので、電装品をPWM制御のパルス立ち上がりにて動作させることが可能となる。このため、スリープ時においてソフトウェア制御部が低い周期、つまり遅い動作をとる場合であっても、ソフトウェア制御の周期間隔によらず、PWM制御のパルスにて電装品を動作させることが可能となるので、出力ポートから電装品への信号供給の最適化が可能となる。よって、出力ポートから電装品に無駄に信号を流さずに済むので、暗電流の削減、ひいては電源の省電力化に効果が高くなる。
【0013】
本発明では、前記出力ポートは、前記電装品に電源を供給する電源ポートであり、前記切換手段は、前記電源ポートをPWM制御に切り換えたとき、当該PWM制御にて出力されるパルスの立ち上がりによって前記電装品に電源供給を開始することにより、当該電装品の電源安定待ち時間を確保することを要旨とする。この構成によれば、電源ポートから電装品への電源供給を、PWM制御のパルス立ち上がりにて開始することが可能となるので、電源安定待ち時間を最適な時間に設定することが可能となる。このため、暗電流の削減、ひいては電源の省電力化に効果が高くなる。
【0014】
本発明では、前記電装品は、電子キーから送信されるID信号を車両において受信する車両受信機であることを要旨とする。この構成によれば、車両受信機に必要な電源安定待ち時間の最低化が可能となるので、車両受信機にかかる電力の省電力化が可能となる。
【0015】
本発明では、前記PWM制御の1周期は、前記スリープ中の前記ソフトウェア制御部の周期間隔よりも長く設定されていることを要旨とする。この構成によれば、出力ポートから電装品に電源供給を開始してから次のソフトウェア制御の周期が到来するまでの間、PWM制御のパルスが供給される状態となるので、電源供給が途中で途切れる可能性がない。
【0016】
本発明では、前記PWM制御のデューティ比は、前記電装品に付与したい電源安定待ち時間をとるように設定されていることを要旨とする。この構成によれば、PWM制御のデューティ比を調整するという簡素な処理によって、電源安定待ち時間を最適な時間に設定することが可能となる。
【発明の効果】
【0017】
本発明によれば、ICにおいて電源を省電力化することができる。
【図面の簡単な説明】
【0018】
【図1】一実施形態のワイヤレスキーシステムの構成図。
【図2】照合ECU、ソフトウェア制御部及び電源ポートの動作態様を示すタイミングチャート。
【図3】(a),(b)はPWM制御の制御内容を説明するタイミングチャート。
【図4】照合ECU、ソフトウェア制御部及び電源ポートの動作態様を示すタイミングチャート。
【図5】従来の電子キーシステムの構成図。
【図6】照合ECU、ソフトウェア制御部及び電源ポートの動作態様を示すタイミングチャート。
【発明を実施するための形態】
【0019】
以下、本発明を具体化したIC出力ポート切換制御装置の一実施形態を図1〜図4に従って説明する。
図1に示すように、車両1には、ワイヤレスキー2からの通信を契機にID照合を実行するワイヤレスキーシステム3が設けられている。ワイヤレスキーシステム3では、ワイヤレスキー2を用いた遠隔操作によって、車載機器を動作可能である。この車載機器には、例えばヒンジ回動ドア、スライドドア、ラッゲージドアなどがある。また、本例のワイヤレスキー2は、キー側での操作にてワイヤレス信号Swlを送信可能な電子キーの一種のことを言う。なお、ワイヤレスキー2が電子キーに相当し、ワイヤレス信号SwlがID信号に相当する。
【0020】
この場合、車両1には、ワイヤレスキー2の正当性を認証する照合ECU(Electronic Control Unit)4と、車両1の各種電装品の電源を管理するボディECU5と、エンジンを制御するエンジンECU6とが設けられ、これらが車内のバス7によって接続されている。照合ECU4のメモリ(図示略)には、車両1に登録されたワイヤレスキー2のIDコードが記憶されている。照合ECU4には、ドア施解錠の駆動源となるドアロックモータ8が接続されている。照合ECU4は、例えば1チップIC(Integrated Circuit)からなる。
【0021】
照合ECU4には、UHF(Ultra High Frequency)帯の電波を受信可能な車両受信機9が接続されている。車両受信機9は、電源線10を介して照合ECU4の電源ポート11に接続され、電源ポート11から電源が供給されている。また、照合ECU4は、データ線12を介して車両受信機9に接続され、このデータ線12を通じて車両受信機9から受信データ(IDコード等)が入力される。なお、車両受信機9が電装品に相当し、電源ポート11が出力ポートに相当する。
【0022】
ワイヤレスキー2には、遠隔操作する車載機器に応じたワイヤレスボタン13が設けられている。ワイヤレスボタン13が操作されると、ワイヤレスキー2からワイヤレス信号SwlがUHF電波により送信される。ワイヤレス信号Swlには、ワイヤレスキー2のIDコードと、操作されたワイヤレスボタン13に応じた機能コードとが含まれている。照合ECU4は、車両受信機9でワイヤレス信号Swlを受信すると、ワイヤレス信号Swl内のIDコードにてID照合(ワイヤレス照合)を行い、この照合が成立することを確認すると、同一信号内に含まれる機能コードに応じた車載機器を動作させる。
【0023】
車両1には、ワイヤレスキー2のキープレート14を用いた機械的操作によって車両1の電源状態を切り換えるメカニカルキーシステム15が設けられている。この場合、車両1の運転席には、正規のキープレート14による回動操作が可能なキーシリンダ16が設けられている。キーシリンダ16は、例えばIG(Ignition)オフ位置、ACC(Accessory)オン位置、IGオン位置、ST(Starter)オン位置の各位置に操作される。
【0024】
キーシリンダ16には、キーシリンダ16内のロータ(図示略)の各回動位置に応じてスイッチ状態が切り換わるイグニッションスイッチ17が設けられている。イグニッションスイッチ17は、例えばACCリレー、IGリレー及びSTリレーを有する。キーシリンダ16にワイヤレスキー2のキープレート14が挿し込まれて回し操作されると、イグニッションスイッチ17がキーシリンダ16の回動位置に応じたスイッチ状態に切り換わる。このとき、キーシリンダ16がST位置まで操作されると、スタータモータが回り、エンジン18が始動される。
【0025】
照合ECU4には、照合ECU4のメモリに書き込まれたプログラム(アプリケーション)に基づき各種動作を実行するソフトウェア制御部19が設けられている。ソフトウェア制御部19は、例えばワイヤレスキー2とのID照合や、照合成立下における各ECU5,6への動作指令出力などのソフトウェア制御を実行可能である。
【0026】
図2に示すように、照合ECU4は、通常、ウェイク動作をとっている。ウェイク動作中、ソフトウェア制御部19は、高周期クロック20から出力されるクロック信号を基に、高い周期(周期間隔:例えば5mS)で動作する。また、照合ECU4は、ウェイク動作中、一定時間動作しない状況が続くと、電源の省電力化のために、スリープ動作に切り換わり、次の動作まで待機する。スリープ動作中、照合ECU4は、内部のソフトウェア制御部19によって、所定周期で最小限のソフトウェア制御を実施する。スリープ動作中、ソフトウェア制御部19は、低周期クロック21から出力されるクロック信号を基に、低い周期(周期間隔:例えば20mS)で動作し、スリープ中に最低限実施すべき動作を繰り返し実行する。
【0027】
車両受信機9は、いつワイヤレスキー2からワイヤレス信号Swlが送信されても対応できるように、所定の周期間隔(例えば200mS間隔)にて定期的に電波受信を監視するポーリング動作によって、電波を探索する。よって、照合ECU4は、ソフトウェア制御部19の動作周期(起動周期)において、ポーリング周期に合わせた起動タイミングで電源ポート11から車両受信機9に電源を供給し、車両受信機9を定期的に起動させる。これにより、車両受信機9は、ポーリング周期にて受信待機動作をとり、ワイヤレス信号Swlを受信可能となる。
【0028】
図1に示すように、照合ECU4には、PWM(Pulse Width Modulation)制御によって車載機器を制御するPWM制御部22が設けられている。本例のPWM制御部22は、元から照合ECU4に組み込まれた制御機能であって、車載機器として例えばキーシリンダ16の周囲に配設されたインジケータ23を点灯制御する。PWM制御部22は、照合ECU4がウェイク時、高周期クロック20で動作し、照合ECU4がスリープ時、低周期クロック21で動作する。インジケータ23は、PWM制御によって点灯/消灯が繰り返されているものの、高速の間欠駆動であるため人の目には点灯しているように見える。そして、図3(a)に示すようにPWMのデューティ比が高く設定されると、インジケータ23の輝度が高くなり、図3(b)に示すようにPWMのデューティ比が低く設定されると、インジケータ23の輝度が低くなる。なお、インジケータ23が他の電装品に相当する。
【0029】
ところで、背景技術でも述べたように、一般的な車両受信機9では、電源投入後、電波受信可能となるまでに、受信準備動作として図4に示すような所定の電源安定待ち時間Tsが必要である。電源安定待ち時間Tsは、電源ポート11から車両受信機9に投入された電源が車両受信機9において安定するまでに要する時間であって、例えば約10mS程度必要である。このため、照合ECU4は、ソフトウェア制御において受信待機動作を開始するパルス(例えば、図4で示すP2,P4)の前段階で、電源ポート11から車両受信機9へ電源供給を開始する必要がある。
【0030】
ここで、照合ECU4がウェイク動作中のとき、ソフトウェア制御部19の動作周期は5mS周期と短いので、電源安定待ち時間Tsが10mS必要な場合でも、電源管理はソフトウェア制御で足りる。よって、ウェイク動作時、ソフトウェア制御部19は、ソフトウェア制御の動作周期において受信待機動作開始のパルスP2から2つ前の周期のパルスP1で、電源ポート11からの電源供給を開始する。これにより、電源ポート11から車両受信機9には、約10mSの電源安定待ち時間Tsが確保される。
【0031】
図4に示すように、本例の照合ECU4には、スリープ時において、照合ECU4のPWMリソース(PWM制御部22)を利用することにより、ソフトウェア制御を介すことなく車両受信機9の電源安定待ち時間Tsを確保するECU電源ポート制御機能が設けられている。PWM制御は、処理の途中でパルスPxが立ち上がる波形をとるので、このパルスPxの立ち上がりを利用して、車両受信機9への電源供給を開始する。本例のECU電源ポート制御機能は、スリープ時のソフトウェア制御における受信待機動作開始のパルスP4の1つ前の周期のパルスP3で、電源ポート11の制御をPWM制御に切り換え、PWM制御によって電源ポート11から車両受信機9に電源供給を行う。なお、パルスPxが電源供給用の信号に相当する。
【0032】
この場合、図1に示すように、照合ECU4内のソフトウェア制御部19には、ソフトウェア制御部19及びPWM制御部22と電源ポート11との接続状態を切り換える切換制御部24が設けられている。本例の切換制御部24は、ソフトウェア制御部19及びPWM制御部22と電源ポート11との間に設けられたスイッチ部25を制御することにより、ソフトウェア制御部19及びPWM制御部22の一方を、電源ポート11に選択的に接続する。スイッチ部25は、機能としてイメージできる部材であって、ソフトウェア制御部19及びPWM制御部22の一方を電源ポート11に選択接続可能となっていれば、必ずしも必要ではない。なお、切換制御部24及びスイッチ部25が切換手段を構成する。
【0033】
本例の切換制御部24は、スリープ時のソフトウェア制御における受信待機動作開始のパルスP4の1つ前の周期のパルスP3で、スイッチ部25の可動接点25aをソフトウェア制御部19側からPWM制御部22側に接続して、PWM制御部22を電源ポート11に接続する。これにより、車両受信機9への電源供給がPWM制御のパルスPxの立ち上がりから開始され、このパルス立ち上がりから受信待機動作開始のパルスP4までの時間が電源安定待ち時間Tsとして確保される。
【0034】
本例の場合、PWM制御の周期は、ソフトウェア制御部19の動作周期(本例は20mS)よりも長い値に設定されている。また、PWM制御のデューティ比は、車両受信機9への電源供給を開始したいタイミングに応じて設定される。例えば、電源供給開始タイミングを早めに設定したい場合は、デューティ比を高く設定し、電源供給開始タイミングを遅めに設定したい場合は、デューティ比を低く設定する。切換制御部24は、スイッチ部25をPWM制御部22側に接続した後、次に到来するソフトウェア制御の周期で、スイッチ部25を元のソフトウェア制御部19側に接続を戻す。
【0035】
次に、本例のECU電源ポート制御機能の動作を、図4を用いて説明する。
図4に示すように、照合ECU4がウェイク動作中、ソフトウェア制御部19は、高周期クロック20のクロック信号を基に、高い周期(5mS周期)でソフトウェア制御を実施している。このため、照合ECU4は、高速での動作が可能であり、種々の制御処理を短い時間にて実行可能である。
【0036】
また、通常、照合ECU4は、ソフトウェア制御の動作周期において、ポーリングの周期が到来すると、その度に車両受信機9に電源を投入して車両受信機9を受信待機状態にする動きをとる。即ち、照合ECU4は、ポーリング周期にて車両受信機9に電源を入れて定期的に受信待機状態にする。ウェイク動作時の照合ECU4は、ポーリング周期から決まる受信待機動作開始のパルスP2から2つ前のパルスP1で電源ポート11をLoレベルからHiレベルに引き上げ、車両受信機9への電源供給を開始する。よって、車両受信機9が受信待機状態をとり、ワイヤレス信号Swlの受信が可能となる。
【0037】
ここで、照合ECU4は、ウェイク動作中、一定時間動作しない状態、つまり車両受信機9で電波受信しない状態が一定時間継続すると、スリープ動作に移行する。照合ECU4がスリープ動作に移行すると、ソフトウェア制御部19は、低周期クロック21のクロック信号を基に、低い周期(20mS周期)でソフトウェア制御を実施する。即ち、スリープ中は、待機電力を少なく抑えるために、電力のかからない動作速度の遅い低周期クロック21でソフトウェア制御を行う。
【0038】
このスリープ動作時、切換制御部24は、ソフトウェア制御の動作周期において、ポーリング周期から決まる受信待機動作開始のパルスP4から1つ前のパルスP3のとき、スイッチ部25をそれまでのソフトウェア制御部19側からPWM制御部22側に接続し、PWM制御部22を電源ポート11に接続する。即ち、電源ポート11の制御を、それまでのソフトウェア制御からPWM制御に切り換える。
【0039】
よって、PWM制御部22は、PWM制御において立ち上がるパルスPxを、電源ポート11から車両受信機9の電源として供給する。即ち、PWM制御のパルスPxの立ち上がりにより、電源ポート11がLoレベルからHiレベルに引き上げられ、車両受信機9に電源供給が開始される。これにより、車両受信機9が受信準備動作をとり、PWM制御のパルスPxにおいてHiレベルとなっている時間が電源安定待ち時間Tsとなる。よって、電源安定待ち時間TsをPWM制御のデューティ比によって設定することが可能となるので、電源安定待ち時間Tsを電源安定に最低限必要な約10mSに設定することが可能となる。
【0040】
切換制御部24は、このPWM制御中、次のソフトウェア制御の周期が到来すると、スイッチ部25をPWM制御部22側からソフトウェア制御部19側に接続し、電源ポート11の制御をソフトウェア制御に戻す。よって、電源ポート11の管理がソフトウェア制御部19に戻され、今まで通りの電源管理が可能となる。
【0041】
以上により、本例においては、照合ECU4がスリープ動作をとる際、照合ECU4に元から備わるPWM制御部22を利用し、ソフトウェア制御部19を介さずに、車両受信機9への電源供給開始を可能とした。即ち、照合ECU4のスリープ動作時、ソフトウェア制御において受信待機動作を開始するパルスP4の1周期前で、電源ポート11をそれまでのソフトウェア制御からPWM制御に切り換え、PWM制御のデューティ比から決まるパルス立ち上がりのタイミングにて、車両受信機9への電源供給を開始する。
【0042】
このため、電源安定待ち時間Tsを最低限必要な時間にピンポイント設定することが可能となるので、従来に比較して電源安定待ち時間Tsを短縮することが可能となる。よって、無駄な電源安定待ち時間Tsを必要とすることに起因する暗電流が削減されるので、電源の省電力化に効果が高くなる。
【0043】
本実施形態の構成によれば、以下に記載の効果を得ることができる。
(1)照合ECU4のスリープ中、車両受信機9のポーリング周期で電源ポート11をソフトウェア制御部19からPWM制御部22に接続を切り換えることにより、電源ポート11をPWM制御にて制御する。このため、PWMリソースを用いて車両受信機9への電源供給を行うことが可能となるので、車両受信機9をPWM制御のパルスPxの立ち上がりにて電源供給することができる。よって、照合ECU4がスリープ時に低い周期で動作する場合であっても、ソフトウェア制御の周期間隔によらず、PWM制御のデューティ比にて車両受信機9への電源供給が可能となるので、電源ポート11から車両受信機9への電源供給の開始時期の最適化が可能となる。即ち、ソフトウェア制御の制御態様を変更することなく、電源安定待ち時間Tsを電源安定に最低限必要な10mSに設定することができる。従って、電源ポート11から車両受信機9に無駄に電源が流されずに済むので、暗電流を削減でき、ひいては電源を省電力化することができる。
【0044】
(2)電源安定待ち時間Tsを最適化(短縮化)する方法としては、例えばポーリングの周期ごとに、ソフトウェア制御の動作周期を電源安定待ち時間Tsとして最適の10mSに設定を切り換えることも可能である。しかし、この方法はソフトウェア制御部19に余分な処理を実施させる必要が生じ、暗電流削減の目的を果たせないことになる。また、ソフトウェア制御部19にとってはイレギュラーな処理を課すことにもなり、ソフトウェア制御が複雑になる問題に繋がる。それに対し、本例はこれら問題が発生しないという観点からしても、特に効果が高いと言える。
【0045】
(3)車両受信機9に必要な電源安定待ち時間Tsの最適化が可能となるので、車両受信機9にかかる電力を省電力化することができる。
(4)PWM制御の1周期は、スリープ時のソフトウェア制御の周期間隔(20mS)以上の値に設定される。このため、PWM制御によって電源ポート11から車両受信機9に電源供給を開始してから次に到来するソフトウェア制御の周期の間、PWM制御のパルスPxがHiレベルで維持されるので、電源供給が途中で途切れてしまうことがない。
【0046】
(5)PWM制御のデューティ比は、電源ポート11から車両受信機9への電源供給を開始したい比率に設定される。よって、PWM制御のデューティ比を調整するという簡素な処理によって、電源安定待ち時間Tsを最適な時間に設定することができる。
【0047】
なお、実施形態はこれまでに述べた構成に限らず、以下の態様に変更してもよい。
・PWM制御のデューティ比は、固定値であることに限定されない。例えば、PWM制御のデューティを変更可能とし、電源安定待ち時間Tsを任意に調整可能としてもよい。
【0048】
・ソフトウェア制御部19は、プログラムに基づき動作するものであれば、どのような処理を実施するものでもよい。
・車両受信機9は、UHF電波を受信可能な受信機に限定されず、例えばHF(High Frequency)等の他の周波数を受信する受信機でもよい。
【0049】
・実施形態に記載した各周期は、実施形態に述べた値に限定されず、他の値に適宜変更可能である。
・出力ポートは、電源ポート11に限定されず、信号を出力可能なポートであればよい。
【0050】
・電装品は、車両受信機9に限定されず、他の機器や装置に変更可能である。
・PWM制御される他の電装品は、インジケータ23に限定されず、他の機器や装置に変更可能である。
【0051】
・ICは、照合ECU4に限定されず、他のECUに変更可能である。
・ワイヤレスキーシステム3は、車両ドアの施解錠を遠隔操作するシステムに限定されず、車両ドア以外の機器を遠隔操作可能なシステムとしてもよい。
【0052】
・本例のECU電源ポート制御機能が適用される電子キーシステムは、ワイヤレスキーシステム3に限定されない。例えば、車両1からの通信を契機に狭域無線により電子キーとのID照合を行うキー操作フリーシステムでもよいし、或いは近距離無線によって電子キーとのID照合を行う近距離無線通信システムでもよい。
【0053】
・本例のECU電源ポート制御機能は、車両1の電子キーシステムに適用されず、他のシステムに応用可能である。また、車両1に適用されることにも限定されず、他の装置やシステムにも応用可能である。
【0054】
次に、上記実施形態及び別例から把握できる技術的思想について、それらの効果とともに以下に追記する。
(イ)請求項1〜5のいずれかにおいて、前記切換手段は、前記出力ポートをPWM制御に切り換えた後、前記PWM制御の1周期の処理が終了すると、前記出力ポートを前記PWM制御部から前記ソフトウェア制御部に接続を戻し、前記電装品を前記ソフトウェア制御にて動作させる。この構成によれば、出力ポートの制御を、最適なタイミングでPWM制御から元のソフトウェア制御に戻すことが可能となる。
【0055】
(ロ)請求項1〜5,前記技術的思想(イ)のいずれかにおいて、前記電装品は、電子キーから送信されるID信号を車両において受信する車両受信機であり、前記出力ポートは、前記車両受信機に電源を供給する電源ポートであり、前記切換手段は、前記電源ポートをPWM制御に切り換えたとき、当該PWM制御にて出力されるパルスの立ち上がりによって前記車両受信機に電源供給を開始することにより、当該車両受信機の電源待ち時間を確保し、電源安定後、前記電源ポートの接続を前記ソフトウェア制御部に戻すことにより、前記車両受信機を受信待機状態として、前記車両受信機での前記ID信号の受信を可能とする。
【0056】
(ハ)請求項1〜5,前記技術的思想(イ),(ロ)のいずれかにおいて、前記電装品は、電子キーから送信されるID信号を車両において受信する車両受信機であり、前記定期的な周期は、前記車両受信機を定期的に受信待機状態に切り換えるポーリングの周期である。この構成によれば、電子キーから送信電波をポーリング周期にて定期的に監視するので、いつ電子キーからID信号が送信されても、このID信号を車両受信機で受信することが可能となる。
【符号の説明】
【0057】
1…車両、2…電子キーとしてのワイヤレスキー、4…ICとしての照合ECU、9…電装品としての車両受信機、11…出力ポートとしての電源ポート、19…ソフトウェア制御部、22…PWM制御部、23…他の電装品としてのインジケータ、24…切換手段を構成する切換制御部、25…切換手段を構成するスイッチ部、Px…信号としての電源用のパルス、Ts…電源安定待ち時間、Sid…ID信号としてのワイヤレス信号。
【特許請求の範囲】
【請求項1】
IC内部のソフトウェア制御部が特定の動作周期で繰り返し起動することで動作し、ウェイク中には前記ソフトウェア制御部が高い周期で動作し、スリープ中には当該ソフトウェア制御部が低い周期で動作し、該ソフトウェア制御部の動作周期から決まる定期的な周期にて出力ポートから信号を出力して、電装品を動作可能なIC出力ポート切換制御装置において、
他の電装品をPWM制御によって動作させるPWM制御部と、
前記スリープ中、前記出力ポートを前記ソフトウェア制御部から前記PWM制御部に接続を切り換えて、当該PWM制御部によって前記出力ポートを制御することにより、前記電装品を前記PWM制御にて動作可能とする切換手段と
を備えたことを特徴とするIC出力ポート切換制御装置。
【請求項2】
前記出力ポートは、前記電装品に電源を供給する電源ポートであり、
前記切換手段は、前記電源ポートをPWM制御に切り換えたとき、当該PWM制御にて出力されるパルスの立ち上がりによって前記電装品に電源供給を開始することにより、当該電装品の電源安定待ち時間を確保する
ことを特徴とする請求項1に記載のIC出力ポート切換制御装置。
【請求項3】
前記電装品は、電子キーから送信されるID信号を車両において受信する車両受信機である
ことを特徴とする請求項1又は2に記載のIC出力ポート切換制御装置。
【請求項4】
前記PWM制御の1周期は、前記スリープ中の前記ソフトウェア制御部の周期間隔よりも長く設定されている
ことを特徴とする請求項1〜3のうちいずれか一項に記載のIC出力ポート切換制御装置。
【請求項5】
前記PWM制御のデューティ比は、前記電装品に付与したい電源安定待ち時間をとるように設定されている
ことを特徴とする請求項1〜4のうちいずれか一項に記載のIC出力ポート切換制御装置。
【請求項1】
IC内部のソフトウェア制御部が特定の動作周期で繰り返し起動することで動作し、ウェイク中には前記ソフトウェア制御部が高い周期で動作し、スリープ中には当該ソフトウェア制御部が低い周期で動作し、該ソフトウェア制御部の動作周期から決まる定期的な周期にて出力ポートから信号を出力して、電装品を動作可能なIC出力ポート切換制御装置において、
他の電装品をPWM制御によって動作させるPWM制御部と、
前記スリープ中、前記出力ポートを前記ソフトウェア制御部から前記PWM制御部に接続を切り換えて、当該PWM制御部によって前記出力ポートを制御することにより、前記電装品を前記PWM制御にて動作可能とする切換手段と
を備えたことを特徴とするIC出力ポート切換制御装置。
【請求項2】
前記出力ポートは、前記電装品に電源を供給する電源ポートであり、
前記切換手段は、前記電源ポートをPWM制御に切り換えたとき、当該PWM制御にて出力されるパルスの立ち上がりによって前記電装品に電源供給を開始することにより、当該電装品の電源安定待ち時間を確保する
ことを特徴とする請求項1に記載のIC出力ポート切換制御装置。
【請求項3】
前記電装品は、電子キーから送信されるID信号を車両において受信する車両受信機である
ことを特徴とする請求項1又は2に記載のIC出力ポート切換制御装置。
【請求項4】
前記PWM制御の1周期は、前記スリープ中の前記ソフトウェア制御部の周期間隔よりも長く設定されている
ことを特徴とする請求項1〜3のうちいずれか一項に記載のIC出力ポート切換制御装置。
【請求項5】
前記PWM制御のデューティ比は、前記電装品に付与したい電源安定待ち時間をとるように設定されている
ことを特徴とする請求項1〜4のうちいずれか一項に記載のIC出力ポート切換制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−109485(P2013−109485A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−252818(P2011−252818)
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000003551)株式会社東海理化電機製作所 (3,198)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000003551)株式会社東海理化電機製作所 (3,198)
【Fターム(参考)】
[ Back to top ]