
ITSシミュレーションシステム
【課題】GPS測位誤差を考慮したITSシミュレーションを行う。
【解決手段】本ITSシミュレーションシステムでは、交通流シミュレータによって求められる車両位置においてGPS装置によって得られる位置情報を模擬する位置情報シミュレータを有し、この誤差を含んだ位置情報を入力としてITSアプリケーションの動作を模擬する。GPS装置によって得られる位置情報は、車両の位置にGPS測位誤差を付加したものとして求める。GPS測位誤差は、ランダムな誤差、実測値に基づいた誤差、周辺の建物の状況を考慮した誤差、または、捕捉可能なGPS衛星数を考慮した誤差とすることが考えられる。
【解決手段】本ITSシミュレーションシステムでは、交通流シミュレータによって求められる車両位置においてGPS装置によって得られる位置情報を模擬する位置情報シミュレータを有し、この誤差を含んだ位置情報を入力としてITSアプリケーションの動作を模擬する。GPS装置によって得られる位置情報は、車両の位置にGPS測位誤差を付加したものとして求める。GPS測位誤差は、ランダムな誤差、実測値に基づいた誤差、周辺の建物の状況を考慮した誤差、または、捕捉可能なGPS衛星数を考慮した誤差とすることが考えられる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ITSシステムのシミュレーションに適用して好適な技術に関する。
【背景技術】
【0002】
近年、ITSシステム(Intelligent Transport System:高度道路交通システム)とし
て、路車間通信や車車間通信などの様々なアプリケーションが検討されている。ITSアプリケーションの例としては、GPS装置によって取得した車両位置を周囲の車両と交換し、出会い頭衝突や追突などの危険が発生した場合にドライバに警告したり、運転に介入して危険を回避したりするものが挙げられる。
【0003】
ITSアプリケーションの動作検証のためには、現実の交通環境下で数十〜数百台の車両を用いた実証実験を行う必要があるが、このような実験は非常に大がかりで時間もコストも要する。開発の最終段階ではこのような手法による検証が必要であるが、開発初期段階からこのような検証を頻繁に行うことは現実的ではない。そこで、計算機を用いたシミュレーションによるITSアプリケーションの検証が不可欠となる。
【0004】
通信を利用するITSアプリケーションを評価するためには、ITSアプリケーションシミュレーションに、各時刻における車両位置を決定するマイクロ交通流シミュレーション、送受信ノード間の通信可能性を評価する電波伝搬シミュレーション、通信による情報が伝達可能かを評価するネットワークシミュレーションを組み合わせる必要がある。本発明者らは、それぞれの要素シミュレータと通信する統合プラットフォームを開発し、各要素シミュレータの選択や交換が容易な疎結合アーキテクチャの統合シミュレーションシステムを開発している。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】疋田敏朗 他、「統合シミュレータによる現実都市環境を模擬した車車間通信シミュレーション」、Dicomo 2008.
【発明の概要】
【発明が解決しようとする課題】
【0006】
現実のITSシステムでは、各車両が自車に搭載されたGPS装置によって位置情報を取得し、周囲の車両や路側機に対して無線通信により送信している。そして、ITSアプリケーションは、受信した他車両の位置情報と自車両の位置情報を比較して、衝突等の危険を判断し警告を発したり運転に介入したりする。従来の統合シミュレーションにおいては、交通流シミュレーションにより得られた位置情報を利用してITSアプリケーションの動作をシミュレーションしていた。
【0007】
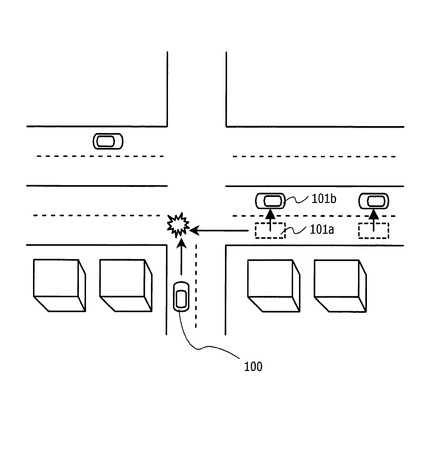
しかしながら、GPS装置から得られる位置情報には測位誤差が含まれており、現在位置を推定しているにすぎない。そして、ITSアプリケーションは、このような測位誤差が含まれた位置情報に基づいて動作する。従来のように、交通流シミュレーションによって得られた位置情報、すなわち誤差を含まない位置情報を利用してITSアプリケーションの動作を模擬する場合は、現実を再現することができない。たとえば、衝突防止のITSアプリケーションを実行している2台の車両100,101が図7に示すように交差点に進入する場合を考える。車両101の実際の位置が101aで示す場所であるときに、GPS装置から得られる位置情報が、測位誤差の影響で位置101bであったとする。衝突防止アプリケーションが誤差を含んだ位置情報を利用する場合は、本来衝突するはずで
あるのに、誤差の影響によりこれらの車両が衝突しないと判断されて、衝突防止機能が働かないことになる。ITSアプリケーションの開発においては、位置情報に測位誤差が含まれる場合にも衝突等が発生しないように設計する必要があるが、従来のシミュレーション手法では位置情報に含まれる誤差を考慮したシミュレーションが実現できない。
【0008】
本発明は上記の問題点を考慮してなされたものであり、その目的は、より現実に近いITSシミュレーションを可能とすることにある。
【課題を解決するための手段】
【0009】
上記目的を達成するために本発明では、以下の手段または処理によってITSシステムの動作をシミュレートする。
【0010】
本発明に係るITSシミュレーションシステムは、
車両動作を模擬し、各時刻での車両位置を求める交通流シミュレータと、
交通流シミュレータによって求められた車両の位置を入力として、当該位置においてGPS装置によって得られる位置情報を求める位置情報シミュレータと、
前記位置情報シミュレータによって求められた位置情報を入力として、ITSアプリケーションの動作を模擬し、ITSアプリケーションが車両動作に与える影響を求めるITSアプリケーションシミュレータと、
を備える。
【0011】
このように本発明におけるITSシミュレーションシステムでは、位置情報シミュレータが、交通流シミュレータによって求められる車両の位置情報においてGPS装置によって得られる位置情報を求めており、ITSアプリケーションシミュレータは、位置情報シミュレータによって求められた位置情報を利用してITSアプリケーション動作を模擬している。したがって、GPS装置によって得られる位置情報に測位誤差が含まれる場合もシミュレートすることができる。
【0012】
なお、位置情報シミュレータによる、GPS装置によって得られる位置情報の算出方法はいくつかの方法が考えられる。
【0013】
第1の方法は、交通流シミュレータによって求められた車両の位置に、正規分布に従ったランダムな誤差を付加した位置を、GPS装置によって得られる位置情報として求める手法である。この手法は、計算処理が最も簡便でありながら、誤差を含んだ位置情報に従ったITSアプリケーションの動作を模擬できるので有効である。
【0014】
第2の方法は、地図情報と、道路上の各位置においてあらかじめ定められたGPS測位誤差の分布とを格納するデータベースを用意し、交通流シミュレータによって求められた車両の位置に、この位置における誤差分布に従ったGPS測位誤差を付加した位置を、GPS装置によって得られる位置情報として求める手法である。データベースに格納される誤差分布は、例えば、実測に基づく分布を採用できる。この方法によれば、より現実的なGPS測位誤差が付加されることになるので、より現実に近いGPS測位情報が得られることになる。なお、分布は、一定の値を誤差として与えるようなものであっても良い。
【0015】
第3の方法は、道路および地物の情報を格納したデータベースを用意し、交通流シミュレータによって求められた車両の位置における地物の形状からGPS測位誤差を求め、求めたGPS測位誤差を付加した位置を、GPS装置によって得られる位置情報として求める手法である。より具体的には、周囲の地物の形状をいくつかのパターン(プロファイル)に分類し、車両位置周囲の地物の形状がどのパターンに属するかを判定して、それに応じた誤差を付加することが考えられる。ここでも、付加する誤差は、一定の値でも良いし
、ある分布に従ったランダムな誤差であっても良い。
【0016】
第4の手法は、道路、地物およびGPS衛星の位置の情報を格納したデータベースを用意し、交通流シミュレータによって求められた位置において捕捉可能なGPS衛星の数を、車両位置、地物の情報、およびGPS衛星の位置に基づいて求める。そして、捕捉可能なGPS衛星の数に応じたGPS測位誤差を求めて、車両位置にこの求めたGPS測位誤差を付加した位置を、GPS装置によって得られる位置情報として求める手法である。ここでも、捕捉可能衛星数に応じた誤差は、一定の値でも良いし、ある分布に従ったランダムな誤差であっても良い。
【0017】
本発明は、上記処理の少なくとも一部を含むITSシミュレーション方法、または、これらの方法を実現するためのプログラムとして捉えることもできる。上記手段および処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【発明の効果】
【0018】
本発明によれば、GPS装置による測位誤差を考慮に入れた、より現実に近いITSシミュレーションが可能となる。
【図面の簡単な説明】
【0019】
【図1】ITS統合シミュレータの概要構成を示す図である。
【図2】ITS統合シミュレータにおける各要素シミュレータの連携を説明する図である。
【図3】第1の実施形態における、(A)位置情報シミュレータの機能ブロック図、および(B)誤差分布を説明する図である。
【図4】第2の実施形態における、(A)位置情報シミュレータの機能ブロック図、および(B)測位誤差DBに格納される誤差分布を説明する図である。
【図5】第3の実施形態における、(A)位置情報シミュレータの機能ブロック図、および(B)測位誤差DBに格納される誤差分布を説明する図である。
【図6】第4の実施形態における、(A)位置情報シミュレータの機能ブロック図、および(B)誤差付加処理の流れを示すフローチャートである。
【図7】従来技術の問題点を説明する図である。
【発明を実施するための形態】
【0020】
以下に図面を参照して、この発明の好適な実施の形態のいくつかを例示的に詳しく説明する。まず、複数の実施形態に共通する構成について説明する。
【0021】
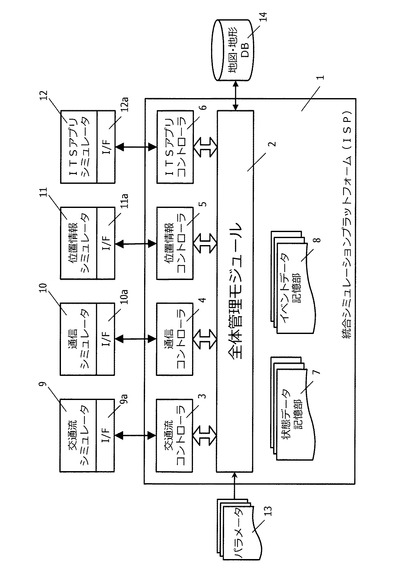
図1は、要素シミュレータを連携させて、通信を利用したITSアプリケーションを評価可能な統合シミュレータ(ITSシミュレーションシステム)の機能構成を示す図である。複数の要素から成り立つ現象をシミュレーションする場合は、それぞれの要素シミュレータを内部で密に組み合わせる方式もあるが、本実施形態においてはそれぞれ単体で動作する要素シミュレータを疎に結合する方式を採用している。疎結合アーキテクチャは、統合シミュレーションプラットフォーム(以下、ISPとも表記する)1を用意し、各要素シミュレータを通信により結合する。このような方式を採用する理由は、評価目的に応じて、要素シミュレータを適宜選択・交換可能とするためである。
【0022】
本発明に係る統合シミュレータは、ISP1によって交通流シミュレータ9、通信シミュレータ10、位置情報シミュレータ11、ITSアプリケーションシミュレータ12を要素シミュレータとして用いる。交通流シミュレータ9は、車両の移動を模擬して、各時刻の車両を決めるミクロ交通流シミュレータである。通信シミュレータ10は、車両の位置が刻々と変化する各時点において、車両間あるいは車両と路側通信設備との間で通信が
可能か否かの評価、および、通信によって情報が伝達できるかを評価する。位置情報シミュレータ11は、各車両がその時点において、GPS装置によって取得する測位情報を求めるものである。ITSアプリケーションシミュレータ12は、車載機器や路側設備のITSアプリケーションを模擬して車両動作に与える影響を評価する。なお、これらの要素シミュレータは、さらに複数のシミュレータから構成されても構わない。たとえば、通信シミュレータは、電波伝搬シミュレータとネットワークシミュレータとから構成されても構わない。
【0023】
ISP1は、各要素シミュレータの連携を管理する全体管理モジュール2と、各要素シミュレータを制御する各種コントローラ(交通流コントローラ3、通信コントローラ4、位置情報コントローラ5、ITSアプリケーションコントローラ6)を有する。ISP1は、各要素シミュレータの各タイムステップにおける状態を記憶する状態データ記憶部7、シミュレーションにおいて発生するイベント(たとえば、ドライバによる急制動、ITSアプリケーションによる衝突回避制御の開始、通信の発生など)を記憶するイベントデータ記憶部8を備える。
【0024】
なお、本実施形態に係る統合シミュレータは、ハードウェアの観点からは、中央演算処理装置(CPU)、RAM等の主記憶装置、HDDやCD−ROM等の補助記憶装置、入出力装置等を含むコンピュータから構成される。このようなコンピュータがプログラムを実行することによって上記の各機能部が実現されるが、これらの機能部のうち一部または全部について専用の回路によって実現しても構わない。なお、本統合シミュレータを複数のコンピュータまたは複数のプロセッサを含むコンピュータによって構成し、各要素シミュレータをそれぞれ並列に実行することも好ましい。
【0025】
全体管理モジュール2は、シミュレーション開始時刻、終了時刻、1タイムステップの時間などを含むシミュレーションパラメータ13を受け付けてシミュレーションを開始する。全体管理モジュール2は、状態データ記憶部7に格納されている状態データや、イベントデータ記憶部8に格納されているイベントデータ、地図・地形データベース14に格納されている地図・地形データを、コントローラ経由で各要素シミュレータに渡して、要素シミュレーションを実行させて、その結果を受け取る。要素シミュレータによる計算結果は、状態データ記憶部7やイベントデータ記憶部8に記憶される。なお、コントローラと各要素シミュレータの間には、要素シミュレータごとの差異を吸収するためのインタフェース9a,10a,11a,12aが設けられており、要素シミュレータを修正することなく利用可能である。
【0026】
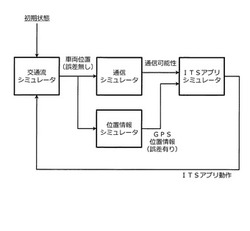
このような統合シミュレータにおける、シミュレーションの全体的な処理の流れを、図2を参照して説明する。まず初期状態に基づいて交通流シミュレータ9が車両動作を模擬することで、次タイムステップにおける各車両の位置を算出する。このようにして求められた各車両の位置は、シミュレーション内での車両の正確な位置を表すものであり、誤差は含まれていない。次に、通信シミュレータ10は、各車両の正確な位置に基づいて、車両間で通信が可能であるか否かの判断を行う。位置情報シミュレータ11は、各車両の正確な位置に基づいて、各車両のGPS装置によって得られるGPS測位情報を求める。このGPS測位情報は、GPS装置における測位誤差が含まれるものである。この誤差を含む位置情報が車両間の通信でやりとりされる位置情報である。そして、ITSアプリケーションシミュレータ12は、通信可能な車両間におけるITSアプリケーションの動作を模擬する。ここで、ITSアプリケーションシミュレータ12は、位置情報シミュレータ11によって得られた誤差を含んだ車両位置情報を利用してITSアプリケーションの動作を模擬する。そして、このITSアプリケーション動作が車両動作に与える影響を考慮して、次タイムステップの車両の位置を、交通流シミュレータ9によって算出する。以下、上記の処理を繰り返すことで、ITSシステムのシミュレーションが実行される。なお
、ここでは各要素シミュレータが直接連携するように説明したが、本実施形態においては全てのデータ連係はISP1を介して行われることは上述したとおりである。
【0027】
このように、本統合シミュレータでは、GPSの測位誤差を考慮しているので、より現実に近いITSシステムのシミュレーションを実行できる。
【0028】
本発明の実施形態においては、位置情報シミュレータ11におけるGPS測位誤差を付加手法に関していくつかの方法がある。以下、それぞれの手法について説明する。
【0029】
(第1の実施形態)
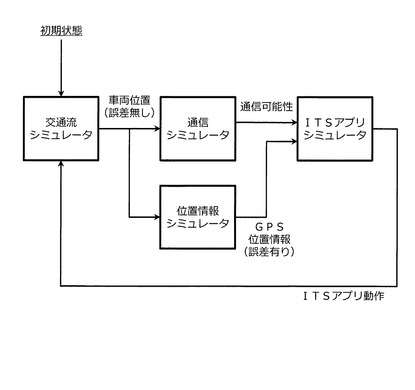
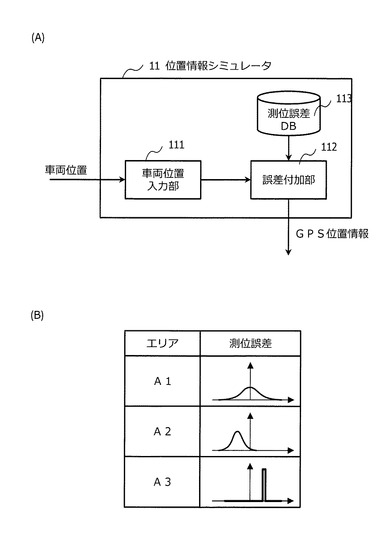
第1の実施形態においては、車両の位置によらず、ランダムな誤差をGPS測位誤差として与える。図3Aに本実施形態における位置情報シミュレータの機能構成を示す。このように、位置情報シミュレータ11は、大略、車両位置入力部111と誤差付加部112を有する。車両位置入力部111は、交通流シミュレータ9によって求められた誤差を含まない車両の位置を取得する。誤差付加部112は、正確な車両位置に、GPS測位誤差を付加したものをGPS装置によって得られる位置情報として決定し、出力する。
【0030】
上述したように、本実施形態では誤差付加部112はランダムな誤差を付加する。図3Bに、誤差付加部112が付加するランダムな誤差の確率分布(確率密度関数)を示す。ここでは、正規分布に従った誤差を与える。正規分布は、平均が0,分散が数cm〜十数m程度とすることが考えられる。
【0031】
なお、図3Bでは1次元方向の誤差分布だけが示されているが、全方位について正規分布に従った誤差を与えても良い。また、車両の進行方向(または道路に沿った方向)とこれに直交する方向とで、異なる誤差を与えても良い。たとえば、車両の進行方向にのみ正規分布に従った誤差を与えるようにしても良い。これは、第1の実施形態のみに限られず、その他の実施形態についても同様である。
【0032】
このような手法によれば、簡便な手法によりGPS測位誤差を模擬することができる。
【0033】
(第2の実施形態)
第2の実施形態においては、位置ごと誤差分布をあらかじめ求めて記憶しておき、車両の位置での誤差分布に従った誤差を与える。図4Aに本実施形態における位置情報シミュレータの機能構成を示す。このように、位置情報シミュレータ11は、大略、車両位置入力部111、測位誤差データベース113、誤差付加部112を有する。測位誤差DB113には、道路の各位置について、測位誤差の分布が格納されている。図4Bに測位誤差DB113に格納されるエリアごとの測位誤差分布を示す。この測位誤差の分布は、実測に基づくものであっても良く、また、数値計算その他の手法によって求められた誤差分布であっても良い。測位誤差は、計測ごとに異なることが予想されるので、確率分布の形式で格納することが好ましい。ただし、必ずしも誤差が複数の値を取るようにする必要はなく、定数の誤差を与えるようにしても構わない。なお、定数の誤差を与える場合も、測位誤差DB113には、この定数誤差を取る確率が100%という分布が格納していると考えられる。
【0034】
誤差付加部112は、車両位置入力部111から車両の正確な位置を受け取り、測位誤差DB113を参照してその位置における分布に従った測位誤差を付加して、GPS装置によって得られる位置情報として出力する。
【0035】
このような手法によれば、位置ごとの特性にしたがった測位誤差を与えることができるのでより正確なシミュレーションが実行できる。誤差分布を実測値に基づいて決定してい
る場合は、より現実に近いシミュレーションが実行できる。
【0036】
(第3の実施形態)
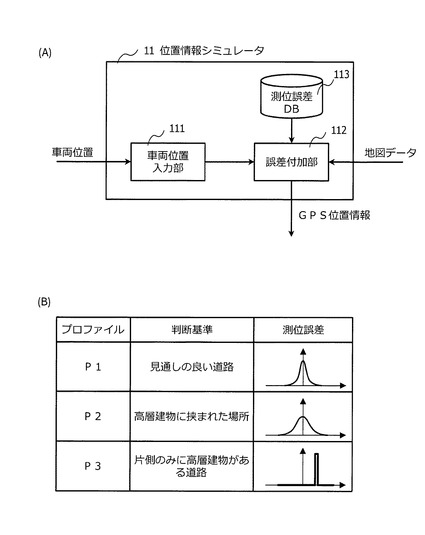
第3の実施形態においては、周辺に位置する建物等の状況に応じていくつかの誤差分布を定義しておき、車両位置における建物等の状況に対応する誤差分布に従った誤差を与える。図5Aに本実施形態における位置情報シミュレータ11の機能構成を示す。このように、位置情報シミュレータ11は、大略、車両位置入力部111、測位誤差DB113、誤差付加部112を有する。
【0037】
測位誤差DB113は、周辺の状況(プロファイル)に応じた、誤差分布を記憶している。図5Bに測位誤差DB113に格納されるプロファイルごとの測位誤差分布を示す。ここでは、「見通しの良い場所」「高層建物に挟まれた場所」「片側のみに高層建物がある場所」の3つのプロファイルを用意しているが、より詳細にプロファイルを定義しても構わない。見通しの良い場所では、測位誤差は小さく、また、特定の方向に誤差が偏ることもないので、誤差の分布として平均がゼロで、分散が小さい(数cm程度)正規分布を与える。また、道路の両脇を高層建物で挟まれた場合は、誤差が大きくなるが、特定方向に誤差が偏ることはないので、誤差の分布として平均がゼロで、分散の大きい(十数m程度)の正規分布を与える。また、道路の片側のみに高層建物があるときは、特定の方向に誤差が偏る場合があり、この場合は誤差分布として平均が非ゼロの正規分布を与えたり、定数値の誤差を与えたりすることが考えられる。もっとも、ここで挙げたプロファイルごとの分布は例示であり、その他の分布を与えるようにしても構わない。
【0038】
誤差付加部112は、車両位置入力部111から受け取った車両の正確な位置と、地図データから得られる車両位置周囲の地物データから、その車両位置がどのようなプロファイルに属するかを判断する。そして、測位誤差DB113を参照して車両位置のプロファイルに応じた誤差を決定し、車両位置入力部111から受け取った車両の正確な位置に付加して、GPS装置によって得られる位置情報として出力する。なお、車両位置がどのプロファイルに属するかを毎回判定することを避けるために、それぞれの位置がどのプロファイルに属するかを地図データにあらかじめ格納しておいても構わない。
【0039】
このようにすれば、道路上の各地点を周囲の状況に応じていくつかのプロファイルに分けて誤差分布を定義しているので、全ての地点について個別に誤差分布を定義するよりも簡易な構成で、上述の実施形態と同様の効果を得ることができる。
【0040】
(第4の実施形態)
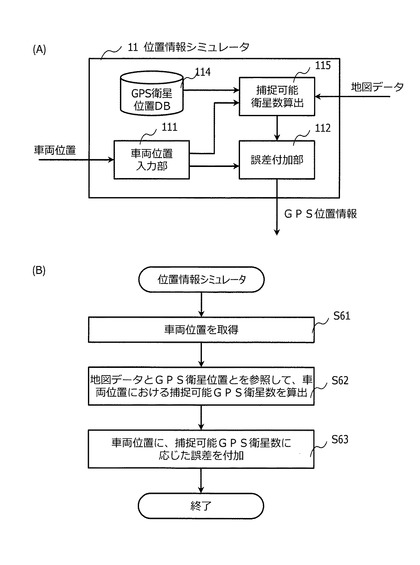
第4の実施形態においては、車両位置において捕捉可能なGPS衛星の数に応じた誤差を与える。図6Aに本実施形態における位置情報シミュレータ11の機能構成を示す。このように、位置情報シミュレータ11は、大略、車両位置入力部111、GPS衛星位置DB114、捕捉可能衛星数算出部111、誤差付加部112を有する。
【0041】
GPS衛星位置DB114は、GPS衛星の軌道データを保持している。したがって、GPS衛星位置DB114を参照することで、任意時刻におけるGPS衛星の位置を算出可能である。捕捉可能衛星数算出部115は、GPS衛星、車両および地物の位置関係をもとに、車両が捕捉可能なGPS衛星の数を算出する。GPS信号は直進性が強いため、車両とGPS衛星を結ぶ線上に建物が存在するか否かによってGPS衛星を捕捉可能であるか否か判断できる。
【0042】
図6Bは本実施形態における誤差付加処理の流れを示すフローチャートである。まず、車両位置入力部111が車両の正確な位置を受け取る(ステップS61)。そして、捕捉可能衛星数算出部115が、GPS衛星位置DB114から得られるGPS衛星の位置、
車両位置入力部111から受け取った車両の位置、および、地図データから得られる周辺の地物の形状を参照して、車両が捕捉可能なGPS衛星の数を算出する(ステップS62)。そして、誤差付加部112は、捕捉可能なGPS衛星数に応じた誤差を車両位置に付加して、その結果をGPS装置によって得られる位置情報として出力する(ステップS63)。なお、あらかじめ捕捉可能なGPS衛星数が少ないほど大きな誤差を与える誤差分布が定められており、誤差付加部112は捕捉可能GPS衛星数に応じた誤差分布に従って測位誤差を付加する。
【0043】
このようにすれば、GPS衛星と車両の位置関係をもとに、車両におけるGPS測位誤差を考慮に入れることができるようになる。したがって、現実に近いITSシミュレーションが可能となる。
【0044】
(その他)
GPS測位誤差として付加する誤差の算出方法は、上記で説明した手法に限られず、上記説明をもとに種々の変形例が考えられる。たとえば、上記の手法は任意に組み合わせて測位誤差を算出しても構わない。たとえば、車両の進行方向(または道路に沿った方向)に関する誤差と、それに直交する方向に関する誤差とを異なる手法で算出しても構わない。また、道路上の位置ごとに異なる手法で誤差を付加しても構わない。また、捕捉可能なGPS衛星数に基づく手法は、その他の手法と組み合わせて、捕捉可能衛星数が少ないほど誤差(誤差分布の分散)を大きくすることができる。
【符号の説明】
【0045】
11 位置情報シミュレータ
111 車両情報入力部
112 誤差付加部
113 測位誤差DB
114 GPS衛星位置DB
115 捕捉可能衛星数算出部
【技術分野】
【0001】
本発明は、ITSシステムのシミュレーションに適用して好適な技術に関する。
【背景技術】
【0002】
近年、ITSシステム(Intelligent Transport System:高度道路交通システム)とし
て、路車間通信や車車間通信などの様々なアプリケーションが検討されている。ITSアプリケーションの例としては、GPS装置によって取得した車両位置を周囲の車両と交換し、出会い頭衝突や追突などの危険が発生した場合にドライバに警告したり、運転に介入して危険を回避したりするものが挙げられる。
【0003】
ITSアプリケーションの動作検証のためには、現実の交通環境下で数十〜数百台の車両を用いた実証実験を行う必要があるが、このような実験は非常に大がかりで時間もコストも要する。開発の最終段階ではこのような手法による検証が必要であるが、開発初期段階からこのような検証を頻繁に行うことは現実的ではない。そこで、計算機を用いたシミュレーションによるITSアプリケーションの検証が不可欠となる。
【0004】
通信を利用するITSアプリケーションを評価するためには、ITSアプリケーションシミュレーションに、各時刻における車両位置を決定するマイクロ交通流シミュレーション、送受信ノード間の通信可能性を評価する電波伝搬シミュレーション、通信による情報が伝達可能かを評価するネットワークシミュレーションを組み合わせる必要がある。本発明者らは、それぞれの要素シミュレータと通信する統合プラットフォームを開発し、各要素シミュレータの選択や交換が容易な疎結合アーキテクチャの統合シミュレーションシステムを開発している。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】疋田敏朗 他、「統合シミュレータによる現実都市環境を模擬した車車間通信シミュレーション」、Dicomo 2008.
【発明の概要】
【発明が解決しようとする課題】
【0006】
現実のITSシステムでは、各車両が自車に搭載されたGPS装置によって位置情報を取得し、周囲の車両や路側機に対して無線通信により送信している。そして、ITSアプリケーションは、受信した他車両の位置情報と自車両の位置情報を比較して、衝突等の危険を判断し警告を発したり運転に介入したりする。従来の統合シミュレーションにおいては、交通流シミュレーションにより得られた位置情報を利用してITSアプリケーションの動作をシミュレーションしていた。
【0007】
しかしながら、GPS装置から得られる位置情報には測位誤差が含まれており、現在位置を推定しているにすぎない。そして、ITSアプリケーションは、このような測位誤差が含まれた位置情報に基づいて動作する。従来のように、交通流シミュレーションによって得られた位置情報、すなわち誤差を含まない位置情報を利用してITSアプリケーションの動作を模擬する場合は、現実を再現することができない。たとえば、衝突防止のITSアプリケーションを実行している2台の車両100,101が図7に示すように交差点に進入する場合を考える。車両101の実際の位置が101aで示す場所であるときに、GPS装置から得られる位置情報が、測位誤差の影響で位置101bであったとする。衝突防止アプリケーションが誤差を含んだ位置情報を利用する場合は、本来衝突するはずで
あるのに、誤差の影響によりこれらの車両が衝突しないと判断されて、衝突防止機能が働かないことになる。ITSアプリケーションの開発においては、位置情報に測位誤差が含まれる場合にも衝突等が発生しないように設計する必要があるが、従来のシミュレーション手法では位置情報に含まれる誤差を考慮したシミュレーションが実現できない。
【0008】
本発明は上記の問題点を考慮してなされたものであり、その目的は、より現実に近いITSシミュレーションを可能とすることにある。
【課題を解決するための手段】
【0009】
上記目的を達成するために本発明では、以下の手段または処理によってITSシステムの動作をシミュレートする。
【0010】
本発明に係るITSシミュレーションシステムは、
車両動作を模擬し、各時刻での車両位置を求める交通流シミュレータと、
交通流シミュレータによって求められた車両の位置を入力として、当該位置においてGPS装置によって得られる位置情報を求める位置情報シミュレータと、
前記位置情報シミュレータによって求められた位置情報を入力として、ITSアプリケーションの動作を模擬し、ITSアプリケーションが車両動作に与える影響を求めるITSアプリケーションシミュレータと、
を備える。
【0011】
このように本発明におけるITSシミュレーションシステムでは、位置情報シミュレータが、交通流シミュレータによって求められる車両の位置情報においてGPS装置によって得られる位置情報を求めており、ITSアプリケーションシミュレータは、位置情報シミュレータによって求められた位置情報を利用してITSアプリケーション動作を模擬している。したがって、GPS装置によって得られる位置情報に測位誤差が含まれる場合もシミュレートすることができる。
【0012】
なお、位置情報シミュレータによる、GPS装置によって得られる位置情報の算出方法はいくつかの方法が考えられる。
【0013】
第1の方法は、交通流シミュレータによって求められた車両の位置に、正規分布に従ったランダムな誤差を付加した位置を、GPS装置によって得られる位置情報として求める手法である。この手法は、計算処理が最も簡便でありながら、誤差を含んだ位置情報に従ったITSアプリケーションの動作を模擬できるので有効である。
【0014】
第2の方法は、地図情報と、道路上の各位置においてあらかじめ定められたGPS測位誤差の分布とを格納するデータベースを用意し、交通流シミュレータによって求められた車両の位置に、この位置における誤差分布に従ったGPS測位誤差を付加した位置を、GPS装置によって得られる位置情報として求める手法である。データベースに格納される誤差分布は、例えば、実測に基づく分布を採用できる。この方法によれば、より現実的なGPS測位誤差が付加されることになるので、より現実に近いGPS測位情報が得られることになる。なお、分布は、一定の値を誤差として与えるようなものであっても良い。
【0015】
第3の方法は、道路および地物の情報を格納したデータベースを用意し、交通流シミュレータによって求められた車両の位置における地物の形状からGPS測位誤差を求め、求めたGPS測位誤差を付加した位置を、GPS装置によって得られる位置情報として求める手法である。より具体的には、周囲の地物の形状をいくつかのパターン(プロファイル)に分類し、車両位置周囲の地物の形状がどのパターンに属するかを判定して、それに応じた誤差を付加することが考えられる。ここでも、付加する誤差は、一定の値でも良いし
、ある分布に従ったランダムな誤差であっても良い。
【0016】
第4の手法は、道路、地物およびGPS衛星の位置の情報を格納したデータベースを用意し、交通流シミュレータによって求められた位置において捕捉可能なGPS衛星の数を、車両位置、地物の情報、およびGPS衛星の位置に基づいて求める。そして、捕捉可能なGPS衛星の数に応じたGPS測位誤差を求めて、車両位置にこの求めたGPS測位誤差を付加した位置を、GPS装置によって得られる位置情報として求める手法である。ここでも、捕捉可能衛星数に応じた誤差は、一定の値でも良いし、ある分布に従ったランダムな誤差であっても良い。
【0017】
本発明は、上記処理の少なくとも一部を含むITSシミュレーション方法、または、これらの方法を実現するためのプログラムとして捉えることもできる。上記手段および処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【発明の効果】
【0018】
本発明によれば、GPS装置による測位誤差を考慮に入れた、より現実に近いITSシミュレーションが可能となる。
【図面の簡単な説明】
【0019】
【図1】ITS統合シミュレータの概要構成を示す図である。
【図2】ITS統合シミュレータにおける各要素シミュレータの連携を説明する図である。
【図3】第1の実施形態における、(A)位置情報シミュレータの機能ブロック図、および(B)誤差分布を説明する図である。
【図4】第2の実施形態における、(A)位置情報シミュレータの機能ブロック図、および(B)測位誤差DBに格納される誤差分布を説明する図である。
【図5】第3の実施形態における、(A)位置情報シミュレータの機能ブロック図、および(B)測位誤差DBに格納される誤差分布を説明する図である。
【図6】第4の実施形態における、(A)位置情報シミュレータの機能ブロック図、および(B)誤差付加処理の流れを示すフローチャートである。
【図7】従来技術の問題点を説明する図である。
【発明を実施するための形態】
【0020】
以下に図面を参照して、この発明の好適な実施の形態のいくつかを例示的に詳しく説明する。まず、複数の実施形態に共通する構成について説明する。
【0021】
図1は、要素シミュレータを連携させて、通信を利用したITSアプリケーションを評価可能な統合シミュレータ(ITSシミュレーションシステム)の機能構成を示す図である。複数の要素から成り立つ現象をシミュレーションする場合は、それぞれの要素シミュレータを内部で密に組み合わせる方式もあるが、本実施形態においてはそれぞれ単体で動作する要素シミュレータを疎に結合する方式を採用している。疎結合アーキテクチャは、統合シミュレーションプラットフォーム(以下、ISPとも表記する)1を用意し、各要素シミュレータを通信により結合する。このような方式を採用する理由は、評価目的に応じて、要素シミュレータを適宜選択・交換可能とするためである。
【0022】
本発明に係る統合シミュレータは、ISP1によって交通流シミュレータ9、通信シミュレータ10、位置情報シミュレータ11、ITSアプリケーションシミュレータ12を要素シミュレータとして用いる。交通流シミュレータ9は、車両の移動を模擬して、各時刻の車両を決めるミクロ交通流シミュレータである。通信シミュレータ10は、車両の位置が刻々と変化する各時点において、車両間あるいは車両と路側通信設備との間で通信が
可能か否かの評価、および、通信によって情報が伝達できるかを評価する。位置情報シミュレータ11は、各車両がその時点において、GPS装置によって取得する測位情報を求めるものである。ITSアプリケーションシミュレータ12は、車載機器や路側設備のITSアプリケーションを模擬して車両動作に与える影響を評価する。なお、これらの要素シミュレータは、さらに複数のシミュレータから構成されても構わない。たとえば、通信シミュレータは、電波伝搬シミュレータとネットワークシミュレータとから構成されても構わない。
【0023】
ISP1は、各要素シミュレータの連携を管理する全体管理モジュール2と、各要素シミュレータを制御する各種コントローラ(交通流コントローラ3、通信コントローラ4、位置情報コントローラ5、ITSアプリケーションコントローラ6)を有する。ISP1は、各要素シミュレータの各タイムステップにおける状態を記憶する状態データ記憶部7、シミュレーションにおいて発生するイベント(たとえば、ドライバによる急制動、ITSアプリケーションによる衝突回避制御の開始、通信の発生など)を記憶するイベントデータ記憶部8を備える。
【0024】
なお、本実施形態に係る統合シミュレータは、ハードウェアの観点からは、中央演算処理装置(CPU)、RAM等の主記憶装置、HDDやCD−ROM等の補助記憶装置、入出力装置等を含むコンピュータから構成される。このようなコンピュータがプログラムを実行することによって上記の各機能部が実現されるが、これらの機能部のうち一部または全部について専用の回路によって実現しても構わない。なお、本統合シミュレータを複数のコンピュータまたは複数のプロセッサを含むコンピュータによって構成し、各要素シミュレータをそれぞれ並列に実行することも好ましい。
【0025】
全体管理モジュール2は、シミュレーション開始時刻、終了時刻、1タイムステップの時間などを含むシミュレーションパラメータ13を受け付けてシミュレーションを開始する。全体管理モジュール2は、状態データ記憶部7に格納されている状態データや、イベントデータ記憶部8に格納されているイベントデータ、地図・地形データベース14に格納されている地図・地形データを、コントローラ経由で各要素シミュレータに渡して、要素シミュレーションを実行させて、その結果を受け取る。要素シミュレータによる計算結果は、状態データ記憶部7やイベントデータ記憶部8に記憶される。なお、コントローラと各要素シミュレータの間には、要素シミュレータごとの差異を吸収するためのインタフェース9a,10a,11a,12aが設けられており、要素シミュレータを修正することなく利用可能である。
【0026】
このような統合シミュレータにおける、シミュレーションの全体的な処理の流れを、図2を参照して説明する。まず初期状態に基づいて交通流シミュレータ9が車両動作を模擬することで、次タイムステップにおける各車両の位置を算出する。このようにして求められた各車両の位置は、シミュレーション内での車両の正確な位置を表すものであり、誤差は含まれていない。次に、通信シミュレータ10は、各車両の正確な位置に基づいて、車両間で通信が可能であるか否かの判断を行う。位置情報シミュレータ11は、各車両の正確な位置に基づいて、各車両のGPS装置によって得られるGPS測位情報を求める。このGPS測位情報は、GPS装置における測位誤差が含まれるものである。この誤差を含む位置情報が車両間の通信でやりとりされる位置情報である。そして、ITSアプリケーションシミュレータ12は、通信可能な車両間におけるITSアプリケーションの動作を模擬する。ここで、ITSアプリケーションシミュレータ12は、位置情報シミュレータ11によって得られた誤差を含んだ車両位置情報を利用してITSアプリケーションの動作を模擬する。そして、このITSアプリケーション動作が車両動作に与える影響を考慮して、次タイムステップの車両の位置を、交通流シミュレータ9によって算出する。以下、上記の処理を繰り返すことで、ITSシステムのシミュレーションが実行される。なお
、ここでは各要素シミュレータが直接連携するように説明したが、本実施形態においては全てのデータ連係はISP1を介して行われることは上述したとおりである。
【0027】
このように、本統合シミュレータでは、GPSの測位誤差を考慮しているので、より現実に近いITSシステムのシミュレーションを実行できる。
【0028】
本発明の実施形態においては、位置情報シミュレータ11におけるGPS測位誤差を付加手法に関していくつかの方法がある。以下、それぞれの手法について説明する。
【0029】
(第1の実施形態)
第1の実施形態においては、車両の位置によらず、ランダムな誤差をGPS測位誤差として与える。図3Aに本実施形態における位置情報シミュレータの機能構成を示す。このように、位置情報シミュレータ11は、大略、車両位置入力部111と誤差付加部112を有する。車両位置入力部111は、交通流シミュレータ9によって求められた誤差を含まない車両の位置を取得する。誤差付加部112は、正確な車両位置に、GPS測位誤差を付加したものをGPS装置によって得られる位置情報として決定し、出力する。
【0030】
上述したように、本実施形態では誤差付加部112はランダムな誤差を付加する。図3Bに、誤差付加部112が付加するランダムな誤差の確率分布(確率密度関数)を示す。ここでは、正規分布に従った誤差を与える。正規分布は、平均が0,分散が数cm〜十数m程度とすることが考えられる。
【0031】
なお、図3Bでは1次元方向の誤差分布だけが示されているが、全方位について正規分布に従った誤差を与えても良い。また、車両の進行方向(または道路に沿った方向)とこれに直交する方向とで、異なる誤差を与えても良い。たとえば、車両の進行方向にのみ正規分布に従った誤差を与えるようにしても良い。これは、第1の実施形態のみに限られず、その他の実施形態についても同様である。
【0032】
このような手法によれば、簡便な手法によりGPS測位誤差を模擬することができる。
【0033】
(第2の実施形態)
第2の実施形態においては、位置ごと誤差分布をあらかじめ求めて記憶しておき、車両の位置での誤差分布に従った誤差を与える。図4Aに本実施形態における位置情報シミュレータの機能構成を示す。このように、位置情報シミュレータ11は、大略、車両位置入力部111、測位誤差データベース113、誤差付加部112を有する。測位誤差DB113には、道路の各位置について、測位誤差の分布が格納されている。図4Bに測位誤差DB113に格納されるエリアごとの測位誤差分布を示す。この測位誤差の分布は、実測に基づくものであっても良く、また、数値計算その他の手法によって求められた誤差分布であっても良い。測位誤差は、計測ごとに異なることが予想されるので、確率分布の形式で格納することが好ましい。ただし、必ずしも誤差が複数の値を取るようにする必要はなく、定数の誤差を与えるようにしても構わない。なお、定数の誤差を与える場合も、測位誤差DB113には、この定数誤差を取る確率が100%という分布が格納していると考えられる。
【0034】
誤差付加部112は、車両位置入力部111から車両の正確な位置を受け取り、測位誤差DB113を参照してその位置における分布に従った測位誤差を付加して、GPS装置によって得られる位置情報として出力する。
【0035】
このような手法によれば、位置ごとの特性にしたがった測位誤差を与えることができるのでより正確なシミュレーションが実行できる。誤差分布を実測値に基づいて決定してい
る場合は、より現実に近いシミュレーションが実行できる。
【0036】
(第3の実施形態)
第3の実施形態においては、周辺に位置する建物等の状況に応じていくつかの誤差分布を定義しておき、車両位置における建物等の状況に対応する誤差分布に従った誤差を与える。図5Aに本実施形態における位置情報シミュレータ11の機能構成を示す。このように、位置情報シミュレータ11は、大略、車両位置入力部111、測位誤差DB113、誤差付加部112を有する。
【0037】
測位誤差DB113は、周辺の状況(プロファイル)に応じた、誤差分布を記憶している。図5Bに測位誤差DB113に格納されるプロファイルごとの測位誤差分布を示す。ここでは、「見通しの良い場所」「高層建物に挟まれた場所」「片側のみに高層建物がある場所」の3つのプロファイルを用意しているが、より詳細にプロファイルを定義しても構わない。見通しの良い場所では、測位誤差は小さく、また、特定の方向に誤差が偏ることもないので、誤差の分布として平均がゼロで、分散が小さい(数cm程度)正規分布を与える。また、道路の両脇を高層建物で挟まれた場合は、誤差が大きくなるが、特定方向に誤差が偏ることはないので、誤差の分布として平均がゼロで、分散の大きい(十数m程度)の正規分布を与える。また、道路の片側のみに高層建物があるときは、特定の方向に誤差が偏る場合があり、この場合は誤差分布として平均が非ゼロの正規分布を与えたり、定数値の誤差を与えたりすることが考えられる。もっとも、ここで挙げたプロファイルごとの分布は例示であり、その他の分布を与えるようにしても構わない。
【0038】
誤差付加部112は、車両位置入力部111から受け取った車両の正確な位置と、地図データから得られる車両位置周囲の地物データから、その車両位置がどのようなプロファイルに属するかを判断する。そして、測位誤差DB113を参照して車両位置のプロファイルに応じた誤差を決定し、車両位置入力部111から受け取った車両の正確な位置に付加して、GPS装置によって得られる位置情報として出力する。なお、車両位置がどのプロファイルに属するかを毎回判定することを避けるために、それぞれの位置がどのプロファイルに属するかを地図データにあらかじめ格納しておいても構わない。
【0039】
このようにすれば、道路上の各地点を周囲の状況に応じていくつかのプロファイルに分けて誤差分布を定義しているので、全ての地点について個別に誤差分布を定義するよりも簡易な構成で、上述の実施形態と同様の効果を得ることができる。
【0040】
(第4の実施形態)
第4の実施形態においては、車両位置において捕捉可能なGPS衛星の数に応じた誤差を与える。図6Aに本実施形態における位置情報シミュレータ11の機能構成を示す。このように、位置情報シミュレータ11は、大略、車両位置入力部111、GPS衛星位置DB114、捕捉可能衛星数算出部111、誤差付加部112を有する。
【0041】
GPS衛星位置DB114は、GPS衛星の軌道データを保持している。したがって、GPS衛星位置DB114を参照することで、任意時刻におけるGPS衛星の位置を算出可能である。捕捉可能衛星数算出部115は、GPS衛星、車両および地物の位置関係をもとに、車両が捕捉可能なGPS衛星の数を算出する。GPS信号は直進性が強いため、車両とGPS衛星を結ぶ線上に建物が存在するか否かによってGPS衛星を捕捉可能であるか否か判断できる。
【0042】
図6Bは本実施形態における誤差付加処理の流れを示すフローチャートである。まず、車両位置入力部111が車両の正確な位置を受け取る(ステップS61)。そして、捕捉可能衛星数算出部115が、GPS衛星位置DB114から得られるGPS衛星の位置、
車両位置入力部111から受け取った車両の位置、および、地図データから得られる周辺の地物の形状を参照して、車両が捕捉可能なGPS衛星の数を算出する(ステップS62)。そして、誤差付加部112は、捕捉可能なGPS衛星数に応じた誤差を車両位置に付加して、その結果をGPS装置によって得られる位置情報として出力する(ステップS63)。なお、あらかじめ捕捉可能なGPS衛星数が少ないほど大きな誤差を与える誤差分布が定められており、誤差付加部112は捕捉可能GPS衛星数に応じた誤差分布に従って測位誤差を付加する。
【0043】
このようにすれば、GPS衛星と車両の位置関係をもとに、車両におけるGPS測位誤差を考慮に入れることができるようになる。したがって、現実に近いITSシミュレーションが可能となる。
【0044】
(その他)
GPS測位誤差として付加する誤差の算出方法は、上記で説明した手法に限られず、上記説明をもとに種々の変形例が考えられる。たとえば、上記の手法は任意に組み合わせて測位誤差を算出しても構わない。たとえば、車両の進行方向(または道路に沿った方向)に関する誤差と、それに直交する方向に関する誤差とを異なる手法で算出しても構わない。また、道路上の位置ごとに異なる手法で誤差を付加しても構わない。また、捕捉可能なGPS衛星数に基づく手法は、その他の手法と組み合わせて、捕捉可能衛星数が少ないほど誤差(誤差分布の分散)を大きくすることができる。
【符号の説明】
【0045】
11 位置情報シミュレータ
111 車両情報入力部
112 誤差付加部
113 測位誤差DB
114 GPS衛星位置DB
115 捕捉可能衛星数算出部
【特許請求の範囲】
【請求項1】
車両動作を模擬し、各時刻での車両位置を求める交通流シミュレータと、
交通流シミュレータによって求められた車両の位置を入力として、当該位置においてGPS装置によって得られる位置情報を求める位置情報シミュレータと、
前記位置情報シミュレータによって求められた位置情報を入力として、ITSアプリケーションの動作を模擬し、ITSアプリケーションが車両動作に与える影響を求めるITSアプリケーションシミュレータと、
を備えるITSシミュレーションシステム。
【請求項2】
前記位置情報シミュレータは、交通流シミュレータによって求められた車両の位置に、正規分布に従ったランダムな誤差を付加した位置を、GPS装置によって得られる位置情報として求める
ことを特徴とする請求項1に記載のITSシミュレーションシステム。
【請求項3】
地図情報と、道路上の各位置においてあらかじめ定められたGPS測位誤差の分布とを格納するデータベースをさらに有し、
前記位置情報シミュレータは、交通流シミュレータによって求められた車両の位置に、当該位置における分布に従ったGPS測位誤差を付加した位置を、GPS装置によって得られる位置情報として求める
ことを特徴とする請求項1に記載のITSシミュレーションシステム。
【請求項4】
道路および地物の情報を格納したデータベースをさらに有し、
前記位置情報シミュレータは、交通流シミュレータによって求められた車両の位置における地物の形状からGPS測位誤差を求め、当該GPS測位誤差を交通流シミュレータによって求められた車両の位置に付加した位置を、GPS装置によって得られる位置情報として求める
ことを特徴とする請求項1に記載のITSシミュレーションシステム。
【請求項5】
道路、地物、およびGPS衛星の位置の情報を格納したデータベースをさらに有し、
前記位置情報シミュレータは、交通流シミュレータによって求められた車両の位置において捕捉可能なGPS衛星の数を、地物の情報およびGPS衛星の位置の情報に基づいて求め、捕捉可能なGPS衛星の数に応じたGPS測位誤差を、交通流シミュレータによって求められた車両の位置に付加した位置を、GPS装置によって得られる位置情報として求める
ことを特徴とする請求項1に記載のITSシミュレーションシステム。
【請求項6】
コンピュータが、
車両動作を模擬し、各時刻での車両位置を求める交通流模擬工程と、
交通流模擬工程によって求められた車両の位置を入力として、当該位置におけるGPS装置によって得られる位置情報を求める位置情報模擬工程と、
位置情報模擬工程において求められた位置情報を入力として、ITSアプリケーションの動作を模擬し、ITSアプリケーションが車両動作に与える影響を求めるITSアプリケーション模擬工程と、
を実行することを特徴とするITSシミュレーション方法。
【請求項1】
車両動作を模擬し、各時刻での車両位置を求める交通流シミュレータと、
交通流シミュレータによって求められた車両の位置を入力として、当該位置においてGPS装置によって得られる位置情報を求める位置情報シミュレータと、
前記位置情報シミュレータによって求められた位置情報を入力として、ITSアプリケーションの動作を模擬し、ITSアプリケーションが車両動作に与える影響を求めるITSアプリケーションシミュレータと、
を備えるITSシミュレーションシステム。
【請求項2】
前記位置情報シミュレータは、交通流シミュレータによって求められた車両の位置に、正規分布に従ったランダムな誤差を付加した位置を、GPS装置によって得られる位置情報として求める
ことを特徴とする請求項1に記載のITSシミュレーションシステム。
【請求項3】
地図情報と、道路上の各位置においてあらかじめ定められたGPS測位誤差の分布とを格納するデータベースをさらに有し、
前記位置情報シミュレータは、交通流シミュレータによって求められた車両の位置に、当該位置における分布に従ったGPS測位誤差を付加した位置を、GPS装置によって得られる位置情報として求める
ことを特徴とする請求項1に記載のITSシミュレーションシステム。
【請求項4】
道路および地物の情報を格納したデータベースをさらに有し、
前記位置情報シミュレータは、交通流シミュレータによって求められた車両の位置における地物の形状からGPS測位誤差を求め、当該GPS測位誤差を交通流シミュレータによって求められた車両の位置に付加した位置を、GPS装置によって得られる位置情報として求める
ことを特徴とする請求項1に記載のITSシミュレーションシステム。
【請求項5】
道路、地物、およびGPS衛星の位置の情報を格納したデータベースをさらに有し、
前記位置情報シミュレータは、交通流シミュレータによって求められた車両の位置において捕捉可能なGPS衛星の数を、地物の情報およびGPS衛星の位置の情報に基づいて求め、捕捉可能なGPS衛星の数に応じたGPS測位誤差を、交通流シミュレータによって求められた車両の位置に付加した位置を、GPS装置によって得られる位置情報として求める
ことを特徴とする請求項1に記載のITSシミュレーションシステム。
【請求項6】
コンピュータが、
車両動作を模擬し、各時刻での車両位置を求める交通流模擬工程と、
交通流模擬工程によって求められた車両の位置を入力として、当該位置におけるGPS装置によって得られる位置情報を求める位置情報模擬工程と、
位置情報模擬工程において求められた位置情報を入力として、ITSアプリケーションの動作を模擬し、ITSアプリケーションが車両動作に与える影響を求めるITSアプリケーション模擬工程と、
を実行することを特徴とするITSシミュレーション方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−165128(P2011−165128A)
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願番号】特願2010−30136(P2010−30136)
【出願日】平成22年2月15日(2010.2.15)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願日】平成22年2月15日(2010.2.15)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]