
MEMS振動子および発振器
【課題】周波数精度の高いMEMS振動子を提供する。
【解決手段】MEMS振動子100は、基板10と、基板10の上方に配置された第1電極20と、少なくとも一部が前記第1電極20との間に空隙を有した状態で配置され、前記基板10の厚み方向に静電力によって振動可能となる梁部34、梁部34の一端34aを支持し基板10の上方に配置された支持部32を有する第2電極30と、を含み、支持部32の一端34aを支持する支持側面32aは、基板10の厚み方向からの平面視で屈曲している屈曲部を有し、一端34aは、屈曲部を含む支持側面32aにより支持されている。
【解決手段】MEMS振動子100は、基板10と、基板10の上方に配置された第1電極20と、少なくとも一部が前記第1電極20との間に空隙を有した状態で配置され、前記基板10の厚み方向に静電力によって振動可能となる梁部34、梁部34の一端34aを支持し基板10の上方に配置された支持部32を有する第2電極30と、を含み、支持部32の一端34aを支持する支持側面32aは、基板10の厚み方向からの平面視で屈曲している屈曲部を有し、一端34aは、屈曲部を含む支持側面32aにより支持されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、MEMS振動子および発振器に関する。
【背景技術】
【0002】
MEMS(Micro Electro Mechanical Systems)は、微小構造体形成技術の1つである。
【0003】
特許文献1には、固定電極および可動電極を有し、両電極間に発生する静電力により片持ち梁型の可動電極を駆動させるMEMS振動子が開示されている。このような片持ち梁型の静電型MEMS振動子の出力は、駆動した際に固定電極と可動電極との間の容量変化によって生じる。そのため、固定電極と可動電極との交差面積(両電極が重なる領域の面積)が大きいほど、出力は大きくなる。
【0004】
一方、駆動周波数は、振動子の固有周波数であり、振動子の形状および寸法によって決まる。これまでに数kHz〜数GHzの周波数帯で駆動する様々な形状のMEMS振動子が提案されている。特許文献1に示すような片持ち梁構造のMEMS振動子の場合、駆動周波数は、梁部(可動電極)の長さと厚みによって決まる。厚みが一定の場合、梁部の長さが大きければ周波数は低く、小さければ周波数は高くなる。
【0005】
このように、MEMS振動子の周波数は、梁部の形状に依存するため、MEMS振動子の製造工程では、高い加工精度が要求される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−162629号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、このようなMEMS振動子の製造工程では、固定電極と可動電極とを別の工程で形成するため、両者の位置関係には誤差が生じる。すなわち、梁の長さと交差面積とに誤差が生じてしまうため、所望の周波数が得られない場合があり、周波数精度が低かった。
【0008】
本発明のいくつかの態様に係る目的の1つは、周波数精度の高いMEMS振動子を提供することにある。また、本発明のいくつかの態様に係る目的の1つは、上述のMEMS振動子を含む発振器を提供することにある。
【課題を解決するための手段】
【0009】
本発明に係るMEMS振動子は、
基板と、
前記基板の上方に配置された第1電極と、
少なくとも一部が前記第1電極との間に空隙を有した状態で配置され、前記基板の厚み方向に静電力によって振動可能となる梁部、および前記梁部の一端を支持し前記基板の上方に配置された支持部を有する第2電極と、
を含み、
前記一端を支持する前記支持部の支持側面は、前記基板の厚み方向からの平面視で屈曲している屈曲部を有し、
前記一端は、前記屈曲部を含む前記支持側面により支持されている。
【0010】
このようなMEMS振動子によれば、梁部の剛性を高めることができる。これにより、所望の周波数を得るために必要な片持ち梁部の梁長さを、支持側面が屈曲部を有さない場合と比較して、長くすることができる。したがって、梁長さに対する製造時の梁形成位置の製造誤差の割合を小さくすることができ、周波数のずれを低減できる。したがって、周波数精度を高めることができる。
【0011】
なお、本発明に係る記載では、「上方」という文言を、例えば、「特定のもの(以下、「A」という)の上方に他の特定のもの(以下、「B」という)を形成する」などと用いる場合、A上に直接Bを形成するような場合と、A上に他のものを介してBを形成するような場合とが含まれるものとして、「上方」という文言を用いている。
【0012】
本発明に係るMEMS振動子において、
前記屈曲部は、前記基板の厚み方向からの平面視で円弧の形状を有していてもよい。
【0013】
このようなMEMS振動子によれば、L字状のような直線からなる屈曲部に比べ梁部の剛性をより高めることができる。これにより、所望の周波数を得るために必要な梁部の長さを、支持側面が屈曲部を有さない場合と比較して、長くすることができる。したがって、梁部の長さに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0014】
本発明に係るMEMS振動子において、
前記一端は、前記基板の厚み方向からの平面視で第1半径を有する円弧の形状を有し、
前記梁部の他端は、前記基板の厚み方向からの平面視で前記第1半径よりも小さい第2半径を有する円弧の形状を有していてもよい。
【0015】
このようなMEMS振動子によれば、後述するように、副振動の周波数を、主振動の周波数から離すことができる。したがって、副振動を抑制することができる。
【0016】
本発明に係るMEMS振動子において、
前記第1電極は、
前記支持部の前記支持側面と対向する第1側面と、
前記第1側面とは反対側に位置し、前記第1側面に沿う形状を有する第2側面と、
を有し、
前記第1側面は、前記基板の厚み方向からの平面視で前記第1半径よりも小さく前記第2半径よりも大きい第3半径を有する円弧の形状を有し、
前記第2側面は、前記基板の厚み方向からの平面視で前記第2半径よりも小さい第4半径を有する円弧の形状を有していてもよい。
【0017】
このようなMEMS振動子によれば、第1側面および第2側面が円弧の形状を有さない場合と比較して、第1電極と第2電極との交差面積(両電極が重なる領域の面積)を維持しつつ、第1電極の面積を小さくすることができる。したがって、第1電極と基板との間の寄生容量を小さくすることができる。
【0018】
本発明に係るMEMS振動子において、
前記第1電極は、前記支持部の前記支持側面と対向する第1側面を有し、
前記第1側面は、前記支持部の前記支持側面に沿う形状を有していてもよい。
【0019】
本発明に係るMEMS振動子において、
前記支持部の前記支持側面は、前記基板の厚み方向からの平面視において直線部をさらに有していてもよい。
【0020】
このようなMEMS振動子によれば、梁部の剛性を高めることができる。これにより、所望の周波数を得るために必要な梁部の長さを、支持側面が屈曲部を有さない場合と比較して、長くすることができる。したがって、梁部の長さに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0021】
本発明に係る発振器は、
本発明に係るMEMS振動子と、
前記MEMS振動子の前記第1電極および前記第2電極と電気的に接続された回路部と、
を含む。
【0022】
このような発振器によれば、本発明に係るMEMS振動子を含むため、周波数精度の高い信号を出力することができる。
【図面の簡単な説明】
【0023】
【図1】第1実施形態に係るMEMS振動子を模式的に示す平面図。
【図2】第1実施形態に係るMEMS振動子を模式的に示す断面図。
【図3】モデルM1を模式的に示す平面図。
【図4】モデルM2を模式的に示す平面図。
【図5】モデルM1およびモデルM2のシミュレーションの結果を示す表。
【図6】第1実施形態に係るMEMS振動子の製造工程を模式的に示す断面図。
【図7】第1実施形態に係るMEMS振動子の製造工程を模式的に示す断面図。
【図8】第1実施形態に係るMEMS振動子の製造工程を模式的に示す断面図。
【図9】第1実施形態の変形例に係るMEMS振動子を模式的に示す断面図。
【図10】第2実施形態に係るMEMS振動子を模式的に示す平面図。
【図11】第3実施形態に係るMEMS振動子を模式的に示す平面図。
【図12】第3実施形態に係るMEMS振動子を模式的に示す断面図。
【図13】第4実施形態に係るMEMS振動子を模式的に示す平面図。
【図14】第4実施形態に係るMEMS振動子を模式的に示す断面図。
【図15】第5実施形態に係るMEMS振動子を模式的に示す平面図。
【図16】第5実施形態に係るMEMS振動子を模式的に示す断面図。
【図17】第6実施形態に係る発振器を示す回路図。
【図18】第6実施形態の変形例に係る発振器を示す回路図。
【発明を実施するための形態】
【0024】
以下、本発明の好適な実施形態について図面を用いて詳細に説明する。なお、以下に説明する実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また、以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
【0025】
1. 第1実施形態
1.1. MEMS振動子
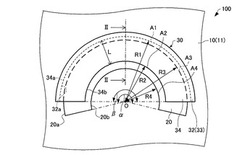
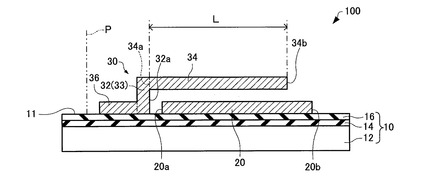
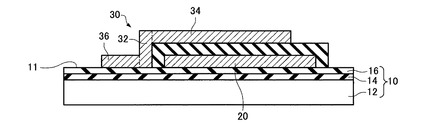
まず、第1実施形態に係るMEMS振動子の構成について、図面を参照しながら説明する。図1は、第1実施形態に係るMEMS振動子100を模式的に示す平面図である。図2は、MEMS振動子100を模式的に示す断面図である。なお、図2は、図1のII−II線断面図である。また、図1では、便宜上、第2電極30の固定部36の図示を省略している。
【0026】
MEMS振動子100は、図1および図2に示すように、基板10と、第1電極20と、第2電極30と、を含む。
【0027】
基板10は、図2に示すように、支持基板12と、第1下地層14と、第2下地層16と、を有することができる。
【0028】
支持基板12としては、例えば、シリコン基板等の半導体基板を用いることができる。支持基板12として、セラミックス基板、ガラス基板、サファイア基板、ダイヤモンド基板、合成樹脂基板などの各種の基板を用いてもよい。
【0029】
第1下地層14は、支持基板12の上に形成されている。第1下地層14としては、例えば、トレンチ絶縁層、LOCOS(Local Oxidation of Silicon)絶縁層、セミリセスLOCOS絶縁層などを用いることができる。第1下地層14は、MEMS振動子100と、支持基板12に形成された他の素子(図示せず)と、を電気的に分離することができる。
【0030】
第2下地層16は、第1下地層14上に形成されている。第2下地層16の材質は、例えば、窒化シリコンである。第2下地層16は、後述するリリースエッチング工程において、エッチングストッパー層として機能することができる。
【0031】
第1電極20は、基板10上に配置されている。第1電極20は、第1側面20aと、第2側面20bと、を有する。第1電極20の厚み(垂線Pに沿う方向の大きさ)は、例えば、0.1μm以上100μm以下である。
【0032】
第1側面20aは、図2に示すように、第2電極30の支持部32の側面32aと対向しており、支持部32の側面32aに沿う形状を有している。具体的には、図1に示すように、基板10の厚み方向からの平面視で(基板10の表面11の垂線P方向からみて)、支持部32の側面32aは、第1半径R1を有する円弧の形状(以下、「円弧A1」という)を有し、この支持部32の側面32aに沿うように、第1側面20aが、第3半径R3を有する円弧(以下、「円弧A3」という)の形状を有している。なお、第3半径R3は、第1半径R1よりも小さい。円弧A3は、円弧A1と中心Oを共有する同心円弧である。円弧A1の中心角βは、例えば、180°であり、円弧A3の中心角αは、例えば、180°以上である。
【0033】
第2側面20bは、第1側面20aとは反対側に位置し、第1側面20aに沿う形状を有している。図示の例では、第2側面20bは、図1に示すように、基板10の厚み方向からの平面視で、第4半径R4を有する円弧(以下、「円弧A4」という)の形状を有している。なお、第4半径R4は、第3半径R3よりも小さい。円弧A4は、例えば、円弧A3と中心Oを共有する同心円弧である。円弧A4は、例えば、円弧A3と同じ中心角αを有している。
【0034】
第1電極20の平面形状(基板10の厚み方向からみた形状)は、図1に示すように、円弧A3、および円弧A3の各端点と中心Oとを結ぶ2本の半径によって囲まれた扇形状の領域から、円弧A4、および円弧A4の各端点と中心Oとを結ぶ2本の半径によって囲まれた扇形状の領域を除いた形状を有している。
【0035】
第2電極30は、第1電極20と間隔を空けて形成されている。第2電極30は、基板10上に固定された支持部32と、第1電極20と対向配置された梁部34と、基板10上に支持部32を固定する固定部36と、を有する。
【0036】
支持部32は、基板10上に配置されている。支持部32は、基板10に固定されている。支持部32は、梁部34を支持している。図示の例では、第2電極30は、片持ち梁状に形成されている。支持部32は、屈曲部33を有している。
【0037】
屈曲部33は、図1に示すように基板10の厚み方向からの平面視において屈曲している。MEMS振動子100では、支持部32の全部が屈曲部33である。図示の例では、屈曲部33は、基板10の厚み方向からの平面視で、円弧の形状を有している。なお、屈曲部33の平面形状は、円弧の形状に限定されず、例えば、楕円弧状、サイクロイド状、サインカーブ状、放物線状等であってもよい。
【0038】
支持部32は、側面(支持側面)32aを有している。支持部32の側面32aは、梁部34の一端を支持している。支持部32(屈曲部33)の側面32aは、図1に示すように、基板10の厚み方向からの平面視で屈曲している屈曲部を有している。そのため、支持部32の側面32aと接する梁部34の一端を構成する第1面34aも、基板10の厚み方向からの平面視で、支持部32の側面32aと同様に、屈曲している。
【0039】
梁部34は、少なくとも一部が第1電極20との間に空隙を有した状態で配置されている。梁部34は、第1電極20の上方に、第1電極20と所定の間隔を空けて形成されている。梁部34は、支持部32の屈曲部33から延出している。図示の例では、梁部34は、支持部32の屈曲部33から中心Oに向かって延出している。梁部34の一端は、支持側面32aにより支持されている。梁部34は、梁部34の一端を構成する第1面34aと、梁部34の他端を構成する第2面34bと、を有している。
【0040】
第1面34aは、支持部32と接する面である。図示の例では、第1面34aは、支持部32の側面32aと接している。すなわち、第1面34aは、支持部32の側面32aに沿って形成されている。第1面34aは、基板10の厚み方向からの平面視で第1半径R1を有する円弧A1の形状を有している。すなわち、梁部32の一端は、基板10の厚み方向からの平面視で、第1半径R1を有する円弧A1の形状を有している。
【0041】
第2面34bは、第1面34aと反対側に位置し、第1面34aに沿う形状を有している。第2面34bは、梁部34の先端に位置している。図示の例では、第2面34bは、図1に示すように基板10の厚み方向から平面視で、第2半径R2を有する円弧(以下、「円弧A2」という)の形状を有している。なお、第2半径R2は、第1半径R1よりも小さい。すなわち、梁部32の他端は、基板10の厚み方向からの平面視で第1半径R1よりも小さい第2半径R2を有する円弧A2の形状を有している。円弧A2は、例えば、円弧A1と中心Oを共有する同心円弧である。円弧A2は、円弧A1と同じ中心角βを有している。
【0042】
梁部34の平面形状は、図1に示すように、円弧A1、および円弧A1の各端点と中心Oとを結ぶ2本の半径によって囲まれた半円状の領域から、円弧A2、および円弧A2の各端点と中心Oとを結ぶ2本の半径によって囲まれた半円状の領域を除いた形状を有している。梁部34の長さL、すなわち、梁部34の動径方向における第1面34aと第2面34bとの間の距離は、一定である。ここで、梁部34の動径方向とは、中心Oから円弧A1上の任意の点に向かう方向である。梁部34は、基板10の厚み方向からの平面視で、支持部32側の第1面34aから梁部34の先端側の第2面34bに向かうにしたがって円弧A1,A2に沿う方向の大きさ(円弧の長さ)が小さくなる。すなわち、梁部34は、図1に示すように基板10の厚み方向からの平面視で、支持部32側から梁部34の先端側に向かうにしたがって窄まる形状を有している。
【0043】
第2電極30の厚み(基板10の厚み方向の大きさ)は、例えば、一定である。すなわち、第2電極30は、図2に示すように、支持部32側の第1面34aから先端側の第2面34bまで、同じ厚みである。
【0044】
円弧A1、A2,A3,A4は、例えば、中心Oを共有する同心円弧である。円弧A1の半径(第1半径)R1は、例えば、他の円弧A2,A3,A4の半径R2,R3,R4よりも大きい。円弧A2の半径(第2半径)R2は、例えば、半径R3よりも小さく半径R4よりも大きい。円弧A3の半径(第3半径)R3は、例えば、半径R1よりも小さく半径R2よりも大きい。円弧A4の半径(第4半径)R4は、例えば、他の円弧A1,A2,A3の半径R1,R2,R3よりも小さい。
【0045】
第1電極20および第2電極30の材質は、例えば、所定の不純物をドーピングすることにより導電性が付与された多結晶シリコンである。第1電極20および第2電極30の間に電圧が印加されると、梁部34は、電極20,30間に発生する静電力により振動することができる。第1電極20、および第2電極30の固定部36は、電極20,30間に電圧を印加するための配線(図示せず)に接続されることができる。
【0046】
固定部36は、支持部32を基板10上に固定している。固定部36には、第2電極30に電圧を印加するための配線(図示しない)が電気的に接続されていてもよい。固定部36の形状は、支持部32を基板10上に固定できれば特に限定されない。
【0047】
なお、図示はしないが、MEMS振動子100は、第1電極20および第2電極30を減圧状態で気密封止する被覆構造体を有していてもよい。これにより、梁部34の振動時における空気抵抗を減少させることができる。
【0048】
MEMS振動子100は、例えば、以下の特徴を有する。
【0049】
MEMS振動子100では、第2電極30の支持部32は、基板10の厚み方向からの平面視で屈曲している屈曲部33を有し、第2電極30の梁部34は、屈曲部33から延出している。言い換えると、第2電極30の支持部32の側面32aは、基板10の厚み方向からの平面視で屈曲している屈曲部を有し、梁部34の一端は、支持部32の側面32aにより支持されている。これにより、梁部34の剛性を高めることができる。したがって、所望の周波数を得るために必要な梁部34の長さLを、支持部が屈曲部を有さない場合と比較して、長くすることができる。そのため、梁部34の長さLに対する製造時の梁形成位置の誤差の割合を小さくすることができ、周波数のずれを低減できる。したがって、周波数精度を高めることができる。以下、詳細に説明する。
【0050】
片持ち梁構造のMEMS振動子の場合、駆動周波数は、梁部(可動電極)の長さと厚みによって決まる。厚みが一定の場合、梁部の長さが大きければ周波数は低く、小さければ周波数は高くなる。ここで、梁部の長さおよび厚みが一定の場合、梁部の剛性が高くなると周波数は高くなる。そのため、同じ周波数を得る場合、梁部の剛性が高い振動子は、梁部の剛性が低い振動子と比べて、梁部の長さを大きくすることができる。梁部の長さを大きくできれば、梁部の長さに対する製造誤差の割合は小さくなるため、製造誤差による周波数のずれを小さくできる。MEMS振動子100では、上述のように、支持部32が屈曲部33を有することにより、支持部が屈曲部を有さない場合(例えば、支持部が基板の厚み方向からの平面視で直線状に形成されている場合)と比べて、梁部34の剛性を高めることができる。したがって、梁部34の長さLに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0051】
MEMS振動子100では、梁部34は、支持部32と接する第1面34aと、第1面34aと反対側に位置し、第1面34aに沿う形状を有する第2面34bと、を有し、第1面34aは、基板10の厚み方向からの平面視で第1半径R1を有する円弧A1の形状を有し、第2面34bは、基板10の厚み方向から平面視で第1半径R1よりも小さい第2半径R2を有する円弧A2の形状を有している。言い換えると、梁部34の一端は、基板10の厚み方向からの平面視で第1半径R1を有する円弧の形状を有し、梁部34の他端は、基板10の厚み方向からの平面視で第1半径R1よりも小さい第2半径R2を有する円弧A2の形状を有している。これにより、副振動の周波数を主振動の周波数から離すことができる。ここで、副振動とは、主振動(必要とする振動)以外のMEMS振動子が持っている振動をいう。副振動の周波数が主振動の周波数に近い場合、意図しない周波数で発振がおこり、所望の周波数特性が得られないことがある。MEMS振動子100では、副振動の周波数を主振動の周波数から離すことができるため、副振動を抑制することができる。理由については、後述する実験例で説明する。
【0052】
MEMS振動子100では、第1電極20は、支持部32の側面32aと対向する第1側面20aと、第1側面20aとは反対側に位置し、第1側面20aに沿う形状を有する第2側面20bと、を有し、第1側面20aは、基板10の厚み方向からの平面視で第1半径R1よりも小さく第2半径R2よりも大きい第3半径R3を有する円弧A3の形状を有し、第2側面20bは、基板10の厚み方向からの平面視で第2半径R2よりも小さい第4半径R4を有する円弧A4の形状を有する。これにより、第1電極20と第2電極30との交差面積(両電極が重なる領域の面積)を維持しつつ、第1電極20の面積(基板10の厚み方向からみた第1電極20の大きさ)を小さくすることができる。したがって、第1電極20と基板10との間の寄生容量を小さくすることができる。
【0053】
MEMS振動子100では、第2電極30の梁部34が、図1に示すように基板10の厚み方向からの平面視で、支持部32側の第1面34aから先端側の第2面34bに向かうにしたがって窄まる形状を有している。これにより、梁部34には、振動時に、圧縮方向の力が加わるため、第2電極30を構成するポリシリコンの結晶粒に対して互いに密着する方向の力が加わる。したがって、振動時における梁部34の強度を高めることができ、信頼性を向上できる。
【0054】
MEMS振動子100では、上述したように、第2電極30の支持部32に屈曲部33を設けることにより、梁部34の剛性を高めて、製造誤差による周波数のずれを低減できる。したがって、例えば、製造工程において、梁部34の周波数をあわせこむための工程が不要となり、容易に所望の周波数を高い精度で得ることができる。
【0055】
1.2. MEMS振動子の実験例
次に、第1実施形態に係るMEMS振動子の実験例について、図面を参照しながら説明する。具体的には、本実施形態に係るMEMS振動子100をモデル化したモデルM1におけるシミュレーションについて説明する。
【0056】
(1)モデルの構成
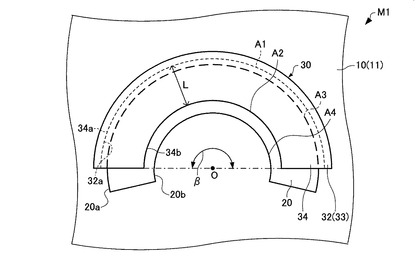
図3は、シミュレーションに用いたモデルM1を、模式的に示す平面図である。モデルM1では、第1面34aは、基板10の厚み方向からの平面視で第1半径R1を有する円弧A1の形状を有し、第2面34bは、基板10の厚み方向からみて第1半径R1よりも小さい第2半径R2を有する円弧A2の形状を有している。円弧A1および円弧A2は、中心Oを中心とする半円である。モデルM1では、梁部34の長さLが4.0μm、中心角βが180°、円弧A3の半径(中心Oと第1側面20aとの間の距離)が、9.95μm、第1電極20と第2電極30との交差面積(両電極が重なる領域の面積)が99.9μm2である。
【0057】
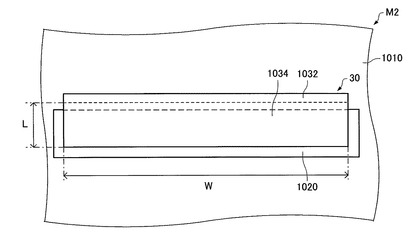
図4は、比較例として用いたモデルM2を、模式的に示す平面図である。モデルM2では、支持部1032が屈曲部を有しておらず、支持部1032が基板1010の厚み方向からの平面視で直線状に形成されている。梁部1034は、基板1010の厚み方向からの平面視で長方形である。梁部1034の長さLが3.788μm、梁部1034の幅Wが30μm、第1電極1020と第2電極1030との交差面積(両電極が重なる領域の面積)が113.64μm2である。なお、梁部の厚みは、モデルM1、モデルM2とも同じである。また、モデルM1およびモデルM2の材質は、シリコンとした。
【0058】
以上のようなモデルM1,M2において、主振動および副振動の周波数を求めた。
【0059】
(2)シミュレーション結果
図5は、モデルM1およびモデルM2のシミュレーションの結果を示す表である。図5において副振動1とは、主振動の周波数に最も近い周波数にピークを持つ副振動であり、副振動2とは、副振動1の次に主振動の周波数に近い周波数にピークを持つ副振動である。
【0060】
図5に示すように、モデルM1において、主振動と副振動1との差は、3.34MHzであり、主振動と副振動2との差は、12.23MHzであった。これに対し、モデルM2では、主振動と副振動1との差は、1.24MHzであり、主振動と副振動2との差は、4.98MHzであった。このように、モデルM1は、モデルM2と比べて、副振動の周波数が、主振動の周波数と離れていることがわかった。
【0061】
したがって、MEMS振動子100では、副振動の周波数を主振動の周波数から離すことができることがわかった。
【0062】
1.3. MEMS振動子の製造方法
次に、本実施形態に係るMEMS振動子の製造方法について、図面を参照しながら説明する。図6〜図8は、本実施形態に係るMEMS振動子100の製造工程を模式的に示す断面図である。
【0063】
図6に示すように、支持基板12上に、第1下地層14および第2下地層16をこの順で形成して、基板10を得る。第1下地層14は、例えば、STI(Shallow Trench Isolation)法、LOCOS法により形成される。第2下地層16は、例えば、CVD(Chemical Vapor Deposition)法、スパッタ法により形成される。
【0064】
次に、基板10上に、第1電極20を形成する。より具体的には、第1電極20は、CVD法やスパッタ法などによって成膜された後、フォトリソグラフィー技術およびエッチング技術によるパターニングによって形成される。次に、例えば多結晶シリコンからなる第1電極20に対して、導電性を付与するために所定の不純物(例えばボロン)をドーピングする。
【0065】
図7に示すように、第1電極20を覆うように犠牲層40を形成する。犠牲層40は、例えば、第1電極20を熱酸化することにより形成される。犠牲層40の材質は、例えば、酸化シリコンである。犠牲層40の厚みは、例えば、0.01μm以上100μm以下である。犠牲層40の厚みによって、第1電極20と梁部34との間の距離が決定される。
【0066】
図8に示すように、犠牲層40上および基板10上に、第2電極30を形成する。より具体的には、第2電極30は、CVD法やスパッタ法などによって成膜された後、フォトリソグラフィー技術およびエッチング技術によるパターニングによって形成される。次に、多結晶シリコンからなる第2電極30に対して、導電性を付与するために所定の不純物(例えばボロン)をドーピングする。以上の工程により、支持部32、梁部34、および固定部36を有する第2電極30が形成される。第2電極30は、一定の膜厚を有する犠牲層40上に形成されるため、支持部32の側面32aは、第1電極20の第1側面20aに沿う形状を有する。
【0067】
図2に示すように、犠牲層40を除去する(リリースエッチング工程)。犠牲層40の除去は、例えば、フッ化水素酸や緩衝フッ酸(フッ化水素酸とフッ化アンモニウムとの混合液)などを用いたウェットエッチングより行われる。リリースエッチング工程において、第2下地層16は、エッチングストッパー層として機能することができる。
【0068】
以上の工程により、MEMS振動子100を製造することができる。
【0069】
MEMS振動子100の製造方法によれば、上述のとおり、周波数精度の高いMEMS振動子100を形成することができる。
【0070】
1.4. MEMS振動子の変形例
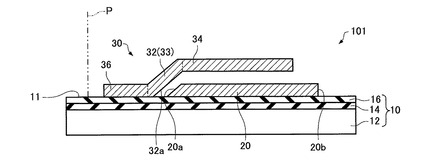
次に、第1実施形態の変形例に係るMEMS振動子について、図面を参照しながら説明する。図9は、第1実施形態の変形例に係るMEMS振動子101を模式的に示す断面図である。なお、図9は、図2に対応している。以下、本実施形態の変形例に係るMEMS振動子200において、MEMS振動子100の構成部材と同様の機能を有する部材については同一の符号を付し、その詳細な説明を省略する。
【0071】
MEMS振動子100の例では、図2に示すように、第2電極30の支持部32は、垂線Pに沿って形成されていた。これに対し、MEMS振動子101では、図9に示すように、第2電極30の支持部32は、基板10から垂線Pに対して傾いて形成されている。図示の例では、基板10の表面11と支持部32の側面32aとがなす角度は、鋭角である。また、第1電極20の第1側面20aは、支持部32の側面32aに沿って形成されており、側面32aと同様に、垂線Pに対して傾いている。
【0072】
MEMS振動子101によれば、MEMS振動子100と同様に、支持部32が屈曲部33を有しているため、梁部34の剛性を高めることができる。したがって、梁部34の長さLに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0073】
2. 第2実施形態
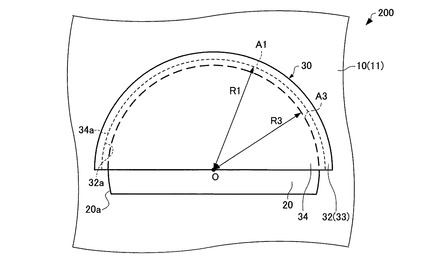
次に、第2実施形態に係るMEMS振動子について、図面を参照しながら説明する。図10は、第2実施形態に係るMEMS振動子200を模式的に示す平面図である。なお、図10は、図1に対応している。また、図10では、便宜上、第2電極30の固定部36の図示を省略している。以下、本実施形態の変形例に係るMEMS振動子200において、MEMS振動子100の構成部材と同様の機能を有する部材については同一の符号を付し、その詳細な説明を省略する。
【0074】
MEMS振動子200では、第2電極30の平面形状は、中心Oを中心とし半径R1を有する半円形状である。梁部34の第1面34aは、基板10の厚み方向からの平面視で半円形状を有している。第1面34aは、支持部32の側面32aと接している。また、第1電極20の平面形状は、中心Oを中心とし半径R1よりも小さい半径R3を有する半円形状の領域を含む形状を有している。第1電極20の第1側面20aは、基板10の厚み方向からの平面視で、半径R3を有する円弧の形状を有している。第1側面20aの一部は、第1面34aに沿って形成されている。
【0075】
MEMS振動子200によれば、MEMS振動子100と同様に、支持部32が屈曲部33を有しているため、梁部34の剛性を高めることができる。したがって、梁部34の長さLに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0076】
なお、MEMS振動子200の製造方法は、上述したMEMS振動子100の製造方法と同様であり、その説明を省略する。
【0077】
3. 第3実施形態
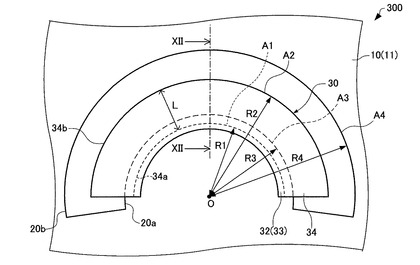
次に、第3実施形態に係るMEMS振動子について、図面を参照しながら説明する。図11は、第3実施形態に係るMEMS振動子300を模式的に示す平面図である。図12は、MEMS振動子300を模式的に示す断面図である。なお、図12は、図11のXII−XII線断面図である。また、図11では、便宜上、第2電極30の固定部36の図示を省略している。以下、本実施形態の変形例に係るMEMS振動子300において、MEMS振動子100の構成部材と同様の機能を有する部材については同一の符号を付し、その詳細な説明を省略する。
【0078】
MEMS振動子100の例では、図1に示すように基板10の厚み方向からの平面視で、第1電極20の第1側面20aは、第3半径R3を有する円弧A3の形状を有し、第1電極20の第2側面20bは、第3半径R3よりも小さい第4半径R4を有する円弧A4の形状を有していた。
【0079】
これに対し、MEMS振動子300では、図11に示すように基板10の厚み方向からの平面視で、第1電極20の第1側面20aは、第3半径R3を有する円弧A3の形状を有し、第1電極20の第2側面20bは、第3半径R3よりも大きい第4半径R4を有する円弧A4の形状を有している。
【0080】
また、MEMS振動子100の例では、図1に示すように基板10の厚み方向からの平面視で、第2電極30の第1面34aは、第1半径R1を有する円弧A1の形状を有し、第2電極30の第2面34bは、第1半径R1よりも小さい第2半径R2を有する円弧A2の形状を有していた。
【0081】
これに対し、MEMS振動子300では、図11に示すように基板10の厚み方向からの平面視で、第2電極30の第1面34aは、第1半径R1を有する円弧A1の形状を有し、第2電極30の第2面34bは、第1半径R1よりも大きい第2半径R2を有する円弧A2の形状を有している。
【0082】
MEMS振動子300において、円弧A1の半径(第1半径)R1は、他の円弧A2,A3,A4の半径R2,R3,R4よりも小さい。円弧A2の半径(第2半径)R2は、半径R4よりも小さく半径R3よりも大きい。円弧A3の半径(第3半径)R3は、半径R2よりも小さく半径R1よりも大きい。円弧A4の半径(第4半径)R4は、他の円弧A1,A2,A3の半径R1,R2,R3よりも大きい。
【0083】
MEMS振動子300によれば、MEMS振動子100と同様に、支持部32が屈曲部33を有しているため、梁部34の剛性を高めることができる。したがって、梁部34の長さLに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0084】
また、MEMS振動子300によれば、第2電極30の梁部34が、図11に示すように基板10の厚み方向からの平面視で、支持部32側の第1面34aから梁部34の先端側の第2面34bに向かうにしたがって広がる(円弧A1,A2に沿う方向の大きさが大きくなる)形状を有している。これにより、上述した犠牲層40(図8参照)を除去するためのリリースエッチング工程において、例えば、MEMS振動子100の例と比べて、エッチング液が第1電極20と第2電極30との間に入り込みやすいため、犠牲層40の除去が容易である。したがって、例えば、エッチング時間の短縮を図ることができる。また、リリース不足を解消でき、歩留まりを向上させることができる。
【0085】
なお、MEMS振動子300の製造方法は、上述したMEMS振動子100の製造方法と同様であり、その説明を省略する。
【0086】
4. 第4実施形態
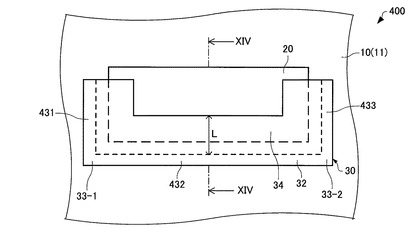
次に、第4実施形態に係るMEMS振動子について、図面を参照しながら説明する。図13は、第4実施形態に係るMEMS振動子400を模式的に示す平面図である。図14は、MEMS振動子400を模式的に示す断面図である。なお、図14は、図13のXIV−XIV線断面図である。また、図13では、便宜上、第2電極30の固定部36の図示を省略している。以下、本実施形態の変形例に係るMEMS振動子400において、MEMS振動子100の構成部材と同様の機能を有する部材については同一の符号を付し、その詳細な説明を省略する。
【0087】
MEMS振動子100の例では、第2電極30の支持部32は、図1に示すように、支持部32全体が1つの屈曲部33であった。
【0088】
これに対し、MEMS振動子400の例では、第2電極30の支持部32は、図13に示すように、複数の屈曲部33を有している。支持部32は、図示の例では、2つの屈曲部33−1,33−2を有している。
【0089】
支持部32は、図13に示すように、第1直線部431と、第2直線部432と、第3直線部433と、第1屈曲部33−1と、第2屈曲部33−2と、を有している。ここで、直線部とは、基板10の厚み方向からの平面視で直線状に形成されている部分をいう。第1屈曲部33−1は、第1直線部431と第2直線部432とを接続し、第2屈曲部33−2は、第2直線部432と第3直線部433とを接続している。図示の例では、第1直線部431と第2直線部432とがなす角度(第1屈曲部33−1の角度)は、90°である。また、第2直線部432と第3直線部433とがなす角度(第2屈曲部33−2の角度)は、90°である。なお、2つの直線部がなす角度(屈曲部の角度)はこれに限定されず、任意の角度に設定されることができる。
【0090】
梁部34は、屈曲部33−1,33−2および直線部431,432,433から延出している。言い換えると、支持部32の側面32aは、屈曲部33−1,33−2に対応する形状の屈曲部および直線部431,432,433に対応する形状の直線部を有している。そのため、梁部34は、支持部32と同様に、屈曲している。
【0091】
MEMS振動子400によれば、MEMS振動子100と同様に、支持部32が屈曲部33−1,33−2を有しているため、梁部34の剛性を高めることができる。したがって、梁部34の長さLに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0092】
また、MEMS振動子400によれば、屈曲部33−1,33−2が、所定の角度(図示の例では90°)で形成されており、例えば、MEMS振動子100の例のように、曲線状(円弧状)に形成されていないため、設計や製造が容易である。
【0093】
なお、MEMS振動子400の製造方法は、上述したMEMS振動子100の製造工程と同様であり、その説明を省略する。
【0094】
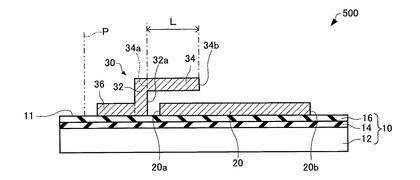
5. 第5実施形態
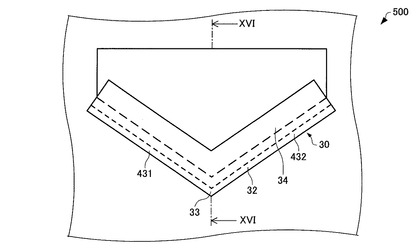
次に、第5実施形態に係るMEMS振動子について、図面を参照しながら説明する。図15は、第5実施形態に係るMEMS振動子500を模式的に示す平面図である。図16は、MEMS振動子500を模式的に示す断面図である。なお、図16は、図15のXVI−XVI線断面図である。また、図15では、便宜上、第2電極30の固定部36の図示を省略している。以下、本実施形態の変形例に係るMEMS振動子500において、MEMS振動子100,400の構成部材と同様の機能を有する部材については同一の符号を付し、その詳細な説明を省略する。
【0095】
MEMS振動子100の例では、第2電極30の支持部32は、図1に示すように、支持部32全体が1つの屈曲部33であった。
【0096】
これに対し、MEMS振動子500では、第2電極30の梁部34は、図15および図16に示すように、2つの直線部431,432と、1つの屈曲部33と、を有している。
【0097】
屈曲部33は、2つの直線部431,432を接続している。2つの直線部431,432がなす角度(屈曲部33の角度)は、例えば、100°である。なお、2つの直線部431,432がなす角度はこれに限定されず、任意の角度に設定されることができる。図示の例では、支持部32および梁部34の平面形状は、V字型である。支持部32から延出している梁部34は、支持部32と同様に屈曲している。
【0098】
MEMS振動子500によれば、MEMS振動子100と同様に、支持部32が屈曲部33を有しているため、梁部34の剛性を高めることができる。したがって、梁部34の長さLに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0099】
また、MEMS振動子500によれば、屈曲部33が、屈曲部33が、所定の角度(図示の例では100°)で形成されており、例えば、MEMS振動子100の例のように、屈曲部33が、曲線状(円弧状)に形成されていないため、設計や製造が容易である。
【0100】
なお、MEMS振動子500の製造方法は、上述したMEMS振動子100の製造工程と同様であり、その説明を省略する。
【0101】
6. 第6実施形態
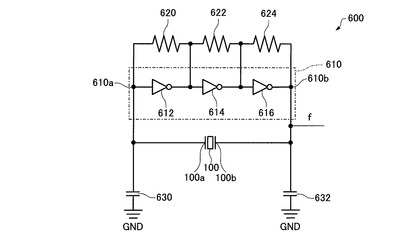
次に、第6実施形態に係る発振器について、図面を参照しながら説明する。図17は、第6実施形態に係る発振器600を示す回路図である。
【0102】
発振器600は、図17に示すように、本発明に係るMEMS振動子(例えばMEMS振動子100)と、反転増幅回路(回路部)610と、を含む。
【0103】
MEMS振動子100は、第1電極20に電気的に接続された第1端子100aと、第2電極30に電気的に接続された第2端子100bと、を有している。MEMS振動子100の第1端子100aは、反転増幅回路610の入力端子610aと少なくとも交流的に接続する。MEMS振動子100の第2端子100bは、反転増幅回路610の出力端子610bと少なくとも交流的に接続する。
【0104】
反転増幅回路610は、所望の発振条件が満たされるように、複数のインバーター(反転回路)や増幅回路を組み合わせて構成されていてもよい。図17に示す例では、反転増幅回路610は、入力端子610aから出力端子610bに向かって順に、インバーター612、インバーター614、インバーター616が直列に接続されて構成されている。
【0105】
発振器600は、反転増幅回路610に対する帰還抵抗を含んで構成されていてもよい。図17に示す例では、インバーター612の入力端子と出力端子とが抵抗620を介して接続され、インバーター614の入力端子と出力端子とが抵抗622を介して接続され、インバーター616の入力端子と出力端子とが抵抗624を介して接続されている。
【0106】
発振器600は、反転増幅回路610の入力端子610aと基準電位(接地電位)との間に接続された第1キャパシター630と、反転増幅回路610の出力端子610bと基準電位(接地電位)との間に接続された第2キャパシター632と、を含んで構成されている。これにより、MEMS振動子100とキャパシター630,632とで共振回路を構成する発振回路とすることができる。発振器600は、この発振回路で得られた発振信号fを出力する。
【0107】
発振器600を構成するトランジスターやキャパシター(図示せず)等の素子は、例えば、基板10上に(図1参照)形成されていてもよい。これにより、MEMS振動子100と反転増幅回路610をモノリシックに形成することができる。
【0108】
発振器600を構成するトランジスター等の素子を基板10上に形成する場合、発振器600を構成するトランジスター等の素子を、上述したMEMS振動子100を形成する工程と同一の工程で形成してもよい。具体的には、犠牲層40を形成する工程において(図7参照)、トランジスターのゲート絶縁層を形成してもよい。さらに、第2電極30を形成する工程において(図8参照)、トランジスターのゲート電極を形成してもよい。このように、MEMS振動子100の製造工程と発振器600を構成するトランジスター等の素子の製造工程を共通化することで、製造工程の簡素化を図ることができる。
【0109】
発振器600によれば、周波数精度の高いMEMS振動子100を含む。そのため、発振器600は、周波数精度の高い信号を出力することができる。
【0110】
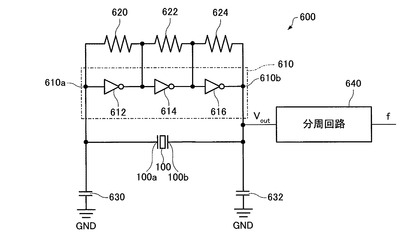
発振器600は、図18に示すように、さらに、分周回路640を有していてもよい。分周回路640は、発振回路の出力信号Voutを分周し、発振信号fを出力する。これにより、発振器600は、例えば、出力信号Voutの周波数よりも低い周波数の出力信号を得ることができる。
【0111】
なお、上述した実施形態及び変形例は一例であって、これらに限定されるわけではない。例えば各実施形態及び各変形例は、複数を適宜組み合わせることが可能である。
【0112】
本発明は、実施の形態で説明した構成と実質的に同一の構成(例えば、機能、方法及び結果が同一の構成、あるいは目的及び効果が同一の構成)を含む。また、本発明は、実施の形態で説明した構成の本質的でない部分を置き換えた構成を含む。また、本発明は、実施の形態で説明した構成と同一の作用効果を奏する構成又は同一の目的を達成することができる構成を含む。また、本発明は、実施の形態で説明した構成に公知技術を付加した構成を含む。
【符号の説明】
【0113】
A1、A2,A3,A4 円弧、R1 第1半径、R2 第2半径、R3 第3半径、
R4 第4半径、L 梁部の長さ、M1,M2 モデル、O 中心、P 垂線、
α,β 中心角、10 基板、11 表面、12 支持基板、14 第1下地層、
16 第2下地層、20 第1電極、20a 第1側面(第3面)、
20b 第2側面(第4面)、30 第2電極、32 支持部、32a 側面、
33,33−1,33−2 屈曲部、34 梁部、34a 第1面、34b 第2面、
36 固定部、40 犠牲層、
100,101,200,300,400 MEMS振動子、431 第1直線部、
432 第2直線部、433 第3直線部、500 MEMS振動子、
600 発振器、610 反転増幅回路、610a 入力端子、610b 出力端子、
612,614,616 インバーター、620,622,624 抵抗、
630 第1キャパシター、632 第2キャパシター、1010 基板、
1020 第1電極、1030 第2電極、1032 支持部、1034 梁部
【技術分野】
【0001】
本発明は、MEMS振動子および発振器に関する。
【背景技術】
【0002】
MEMS(Micro Electro Mechanical Systems)は、微小構造体形成技術の1つである。
【0003】
特許文献1には、固定電極および可動電極を有し、両電極間に発生する静電力により片持ち梁型の可動電極を駆動させるMEMS振動子が開示されている。このような片持ち梁型の静電型MEMS振動子の出力は、駆動した際に固定電極と可動電極との間の容量変化によって生じる。そのため、固定電極と可動電極との交差面積(両電極が重なる領域の面積)が大きいほど、出力は大きくなる。
【0004】
一方、駆動周波数は、振動子の固有周波数であり、振動子の形状および寸法によって決まる。これまでに数kHz〜数GHzの周波数帯で駆動する様々な形状のMEMS振動子が提案されている。特許文献1に示すような片持ち梁構造のMEMS振動子の場合、駆動周波数は、梁部(可動電極)の長さと厚みによって決まる。厚みが一定の場合、梁部の長さが大きければ周波数は低く、小さければ周波数は高くなる。
【0005】
このように、MEMS振動子の周波数は、梁部の形状に依存するため、MEMS振動子の製造工程では、高い加工精度が要求される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−162629号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、このようなMEMS振動子の製造工程では、固定電極と可動電極とを別の工程で形成するため、両者の位置関係には誤差が生じる。すなわち、梁の長さと交差面積とに誤差が生じてしまうため、所望の周波数が得られない場合があり、周波数精度が低かった。
【0008】
本発明のいくつかの態様に係る目的の1つは、周波数精度の高いMEMS振動子を提供することにある。また、本発明のいくつかの態様に係る目的の1つは、上述のMEMS振動子を含む発振器を提供することにある。
【課題を解決するための手段】
【0009】
本発明に係るMEMS振動子は、
基板と、
前記基板の上方に配置された第1電極と、
少なくとも一部が前記第1電極との間に空隙を有した状態で配置され、前記基板の厚み方向に静電力によって振動可能となる梁部、および前記梁部の一端を支持し前記基板の上方に配置された支持部を有する第2電極と、
を含み、
前記一端を支持する前記支持部の支持側面は、前記基板の厚み方向からの平面視で屈曲している屈曲部を有し、
前記一端は、前記屈曲部を含む前記支持側面により支持されている。
【0010】
このようなMEMS振動子によれば、梁部の剛性を高めることができる。これにより、所望の周波数を得るために必要な片持ち梁部の梁長さを、支持側面が屈曲部を有さない場合と比較して、長くすることができる。したがって、梁長さに対する製造時の梁形成位置の製造誤差の割合を小さくすることができ、周波数のずれを低減できる。したがって、周波数精度を高めることができる。
【0011】
なお、本発明に係る記載では、「上方」という文言を、例えば、「特定のもの(以下、「A」という)の上方に他の特定のもの(以下、「B」という)を形成する」などと用いる場合、A上に直接Bを形成するような場合と、A上に他のものを介してBを形成するような場合とが含まれるものとして、「上方」という文言を用いている。
【0012】
本発明に係るMEMS振動子において、
前記屈曲部は、前記基板の厚み方向からの平面視で円弧の形状を有していてもよい。
【0013】
このようなMEMS振動子によれば、L字状のような直線からなる屈曲部に比べ梁部の剛性をより高めることができる。これにより、所望の周波数を得るために必要な梁部の長さを、支持側面が屈曲部を有さない場合と比較して、長くすることができる。したがって、梁部の長さに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0014】
本発明に係るMEMS振動子において、
前記一端は、前記基板の厚み方向からの平面視で第1半径を有する円弧の形状を有し、
前記梁部の他端は、前記基板の厚み方向からの平面視で前記第1半径よりも小さい第2半径を有する円弧の形状を有していてもよい。
【0015】
このようなMEMS振動子によれば、後述するように、副振動の周波数を、主振動の周波数から離すことができる。したがって、副振動を抑制することができる。
【0016】
本発明に係るMEMS振動子において、
前記第1電極は、
前記支持部の前記支持側面と対向する第1側面と、
前記第1側面とは反対側に位置し、前記第1側面に沿う形状を有する第2側面と、
を有し、
前記第1側面は、前記基板の厚み方向からの平面視で前記第1半径よりも小さく前記第2半径よりも大きい第3半径を有する円弧の形状を有し、
前記第2側面は、前記基板の厚み方向からの平面視で前記第2半径よりも小さい第4半径を有する円弧の形状を有していてもよい。
【0017】
このようなMEMS振動子によれば、第1側面および第2側面が円弧の形状を有さない場合と比較して、第1電極と第2電極との交差面積(両電極が重なる領域の面積)を維持しつつ、第1電極の面積を小さくすることができる。したがって、第1電極と基板との間の寄生容量を小さくすることができる。
【0018】
本発明に係るMEMS振動子において、
前記第1電極は、前記支持部の前記支持側面と対向する第1側面を有し、
前記第1側面は、前記支持部の前記支持側面に沿う形状を有していてもよい。
【0019】
本発明に係るMEMS振動子において、
前記支持部の前記支持側面は、前記基板の厚み方向からの平面視において直線部をさらに有していてもよい。
【0020】
このようなMEMS振動子によれば、梁部の剛性を高めることができる。これにより、所望の周波数を得るために必要な梁部の長さを、支持側面が屈曲部を有さない場合と比較して、長くすることができる。したがって、梁部の長さに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0021】
本発明に係る発振器は、
本発明に係るMEMS振動子と、
前記MEMS振動子の前記第1電極および前記第2電極と電気的に接続された回路部と、
を含む。
【0022】
このような発振器によれば、本発明に係るMEMS振動子を含むため、周波数精度の高い信号を出力することができる。
【図面の簡単な説明】
【0023】
【図1】第1実施形態に係るMEMS振動子を模式的に示す平面図。
【図2】第1実施形態に係るMEMS振動子を模式的に示す断面図。
【図3】モデルM1を模式的に示す平面図。
【図4】モデルM2を模式的に示す平面図。
【図5】モデルM1およびモデルM2のシミュレーションの結果を示す表。
【図6】第1実施形態に係るMEMS振動子の製造工程を模式的に示す断面図。
【図7】第1実施形態に係るMEMS振動子の製造工程を模式的に示す断面図。
【図8】第1実施形態に係るMEMS振動子の製造工程を模式的に示す断面図。
【図9】第1実施形態の変形例に係るMEMS振動子を模式的に示す断面図。
【図10】第2実施形態に係るMEMS振動子を模式的に示す平面図。
【図11】第3実施形態に係るMEMS振動子を模式的に示す平面図。
【図12】第3実施形態に係るMEMS振動子を模式的に示す断面図。
【図13】第4実施形態に係るMEMS振動子を模式的に示す平面図。
【図14】第4実施形態に係るMEMS振動子を模式的に示す断面図。
【図15】第5実施形態に係るMEMS振動子を模式的に示す平面図。
【図16】第5実施形態に係るMEMS振動子を模式的に示す断面図。
【図17】第6実施形態に係る発振器を示す回路図。
【図18】第6実施形態の変形例に係る発振器を示す回路図。
【発明を実施するための形態】
【0024】
以下、本発明の好適な実施形態について図面を用いて詳細に説明する。なお、以下に説明する実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また、以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
【0025】
1. 第1実施形態
1.1. MEMS振動子
まず、第1実施形態に係るMEMS振動子の構成について、図面を参照しながら説明する。図1は、第1実施形態に係るMEMS振動子100を模式的に示す平面図である。図2は、MEMS振動子100を模式的に示す断面図である。なお、図2は、図1のII−II線断面図である。また、図1では、便宜上、第2電極30の固定部36の図示を省略している。
【0026】
MEMS振動子100は、図1および図2に示すように、基板10と、第1電極20と、第2電極30と、を含む。
【0027】
基板10は、図2に示すように、支持基板12と、第1下地層14と、第2下地層16と、を有することができる。
【0028】
支持基板12としては、例えば、シリコン基板等の半導体基板を用いることができる。支持基板12として、セラミックス基板、ガラス基板、サファイア基板、ダイヤモンド基板、合成樹脂基板などの各種の基板を用いてもよい。
【0029】
第1下地層14は、支持基板12の上に形成されている。第1下地層14としては、例えば、トレンチ絶縁層、LOCOS(Local Oxidation of Silicon)絶縁層、セミリセスLOCOS絶縁層などを用いることができる。第1下地層14は、MEMS振動子100と、支持基板12に形成された他の素子(図示せず)と、を電気的に分離することができる。
【0030】
第2下地層16は、第1下地層14上に形成されている。第2下地層16の材質は、例えば、窒化シリコンである。第2下地層16は、後述するリリースエッチング工程において、エッチングストッパー層として機能することができる。
【0031】
第1電極20は、基板10上に配置されている。第1電極20は、第1側面20aと、第2側面20bと、を有する。第1電極20の厚み(垂線Pに沿う方向の大きさ)は、例えば、0.1μm以上100μm以下である。
【0032】
第1側面20aは、図2に示すように、第2電極30の支持部32の側面32aと対向しており、支持部32の側面32aに沿う形状を有している。具体的には、図1に示すように、基板10の厚み方向からの平面視で(基板10の表面11の垂線P方向からみて)、支持部32の側面32aは、第1半径R1を有する円弧の形状(以下、「円弧A1」という)を有し、この支持部32の側面32aに沿うように、第1側面20aが、第3半径R3を有する円弧(以下、「円弧A3」という)の形状を有している。なお、第3半径R3は、第1半径R1よりも小さい。円弧A3は、円弧A1と中心Oを共有する同心円弧である。円弧A1の中心角βは、例えば、180°であり、円弧A3の中心角αは、例えば、180°以上である。
【0033】
第2側面20bは、第1側面20aとは反対側に位置し、第1側面20aに沿う形状を有している。図示の例では、第2側面20bは、図1に示すように、基板10の厚み方向からの平面視で、第4半径R4を有する円弧(以下、「円弧A4」という)の形状を有している。なお、第4半径R4は、第3半径R3よりも小さい。円弧A4は、例えば、円弧A3と中心Oを共有する同心円弧である。円弧A4は、例えば、円弧A3と同じ中心角αを有している。
【0034】
第1電極20の平面形状(基板10の厚み方向からみた形状)は、図1に示すように、円弧A3、および円弧A3の各端点と中心Oとを結ぶ2本の半径によって囲まれた扇形状の領域から、円弧A4、および円弧A4の各端点と中心Oとを結ぶ2本の半径によって囲まれた扇形状の領域を除いた形状を有している。
【0035】
第2電極30は、第1電極20と間隔を空けて形成されている。第2電極30は、基板10上に固定された支持部32と、第1電極20と対向配置された梁部34と、基板10上に支持部32を固定する固定部36と、を有する。
【0036】
支持部32は、基板10上に配置されている。支持部32は、基板10に固定されている。支持部32は、梁部34を支持している。図示の例では、第2電極30は、片持ち梁状に形成されている。支持部32は、屈曲部33を有している。
【0037】
屈曲部33は、図1に示すように基板10の厚み方向からの平面視において屈曲している。MEMS振動子100では、支持部32の全部が屈曲部33である。図示の例では、屈曲部33は、基板10の厚み方向からの平面視で、円弧の形状を有している。なお、屈曲部33の平面形状は、円弧の形状に限定されず、例えば、楕円弧状、サイクロイド状、サインカーブ状、放物線状等であってもよい。
【0038】
支持部32は、側面(支持側面)32aを有している。支持部32の側面32aは、梁部34の一端を支持している。支持部32(屈曲部33)の側面32aは、図1に示すように、基板10の厚み方向からの平面視で屈曲している屈曲部を有している。そのため、支持部32の側面32aと接する梁部34の一端を構成する第1面34aも、基板10の厚み方向からの平面視で、支持部32の側面32aと同様に、屈曲している。
【0039】
梁部34は、少なくとも一部が第1電極20との間に空隙を有した状態で配置されている。梁部34は、第1電極20の上方に、第1電極20と所定の間隔を空けて形成されている。梁部34は、支持部32の屈曲部33から延出している。図示の例では、梁部34は、支持部32の屈曲部33から中心Oに向かって延出している。梁部34の一端は、支持側面32aにより支持されている。梁部34は、梁部34の一端を構成する第1面34aと、梁部34の他端を構成する第2面34bと、を有している。
【0040】
第1面34aは、支持部32と接する面である。図示の例では、第1面34aは、支持部32の側面32aと接している。すなわち、第1面34aは、支持部32の側面32aに沿って形成されている。第1面34aは、基板10の厚み方向からの平面視で第1半径R1を有する円弧A1の形状を有している。すなわち、梁部32の一端は、基板10の厚み方向からの平面視で、第1半径R1を有する円弧A1の形状を有している。
【0041】
第2面34bは、第1面34aと反対側に位置し、第1面34aに沿う形状を有している。第2面34bは、梁部34の先端に位置している。図示の例では、第2面34bは、図1に示すように基板10の厚み方向から平面視で、第2半径R2を有する円弧(以下、「円弧A2」という)の形状を有している。なお、第2半径R2は、第1半径R1よりも小さい。すなわち、梁部32の他端は、基板10の厚み方向からの平面視で第1半径R1よりも小さい第2半径R2を有する円弧A2の形状を有している。円弧A2は、例えば、円弧A1と中心Oを共有する同心円弧である。円弧A2は、円弧A1と同じ中心角βを有している。
【0042】
梁部34の平面形状は、図1に示すように、円弧A1、および円弧A1の各端点と中心Oとを結ぶ2本の半径によって囲まれた半円状の領域から、円弧A2、および円弧A2の各端点と中心Oとを結ぶ2本の半径によって囲まれた半円状の領域を除いた形状を有している。梁部34の長さL、すなわち、梁部34の動径方向における第1面34aと第2面34bとの間の距離は、一定である。ここで、梁部34の動径方向とは、中心Oから円弧A1上の任意の点に向かう方向である。梁部34は、基板10の厚み方向からの平面視で、支持部32側の第1面34aから梁部34の先端側の第2面34bに向かうにしたがって円弧A1,A2に沿う方向の大きさ(円弧の長さ)が小さくなる。すなわち、梁部34は、図1に示すように基板10の厚み方向からの平面視で、支持部32側から梁部34の先端側に向かうにしたがって窄まる形状を有している。
【0043】
第2電極30の厚み(基板10の厚み方向の大きさ)は、例えば、一定である。すなわち、第2電極30は、図2に示すように、支持部32側の第1面34aから先端側の第2面34bまで、同じ厚みである。
【0044】
円弧A1、A2,A3,A4は、例えば、中心Oを共有する同心円弧である。円弧A1の半径(第1半径)R1は、例えば、他の円弧A2,A3,A4の半径R2,R3,R4よりも大きい。円弧A2の半径(第2半径)R2は、例えば、半径R3よりも小さく半径R4よりも大きい。円弧A3の半径(第3半径)R3は、例えば、半径R1よりも小さく半径R2よりも大きい。円弧A4の半径(第4半径)R4は、例えば、他の円弧A1,A2,A3の半径R1,R2,R3よりも小さい。
【0045】
第1電極20および第2電極30の材質は、例えば、所定の不純物をドーピングすることにより導電性が付与された多結晶シリコンである。第1電極20および第2電極30の間に電圧が印加されると、梁部34は、電極20,30間に発生する静電力により振動することができる。第1電極20、および第2電極30の固定部36は、電極20,30間に電圧を印加するための配線(図示せず)に接続されることができる。
【0046】
固定部36は、支持部32を基板10上に固定している。固定部36には、第2電極30に電圧を印加するための配線(図示しない)が電気的に接続されていてもよい。固定部36の形状は、支持部32を基板10上に固定できれば特に限定されない。
【0047】
なお、図示はしないが、MEMS振動子100は、第1電極20および第2電極30を減圧状態で気密封止する被覆構造体を有していてもよい。これにより、梁部34の振動時における空気抵抗を減少させることができる。
【0048】
MEMS振動子100は、例えば、以下の特徴を有する。
【0049】
MEMS振動子100では、第2電極30の支持部32は、基板10の厚み方向からの平面視で屈曲している屈曲部33を有し、第2電極30の梁部34は、屈曲部33から延出している。言い換えると、第2電極30の支持部32の側面32aは、基板10の厚み方向からの平面視で屈曲している屈曲部を有し、梁部34の一端は、支持部32の側面32aにより支持されている。これにより、梁部34の剛性を高めることができる。したがって、所望の周波数を得るために必要な梁部34の長さLを、支持部が屈曲部を有さない場合と比較して、長くすることができる。そのため、梁部34の長さLに対する製造時の梁形成位置の誤差の割合を小さくすることができ、周波数のずれを低減できる。したがって、周波数精度を高めることができる。以下、詳細に説明する。
【0050】
片持ち梁構造のMEMS振動子の場合、駆動周波数は、梁部(可動電極)の長さと厚みによって決まる。厚みが一定の場合、梁部の長さが大きければ周波数は低く、小さければ周波数は高くなる。ここで、梁部の長さおよび厚みが一定の場合、梁部の剛性が高くなると周波数は高くなる。そのため、同じ周波数を得る場合、梁部の剛性が高い振動子は、梁部の剛性が低い振動子と比べて、梁部の長さを大きくすることができる。梁部の長さを大きくできれば、梁部の長さに対する製造誤差の割合は小さくなるため、製造誤差による周波数のずれを小さくできる。MEMS振動子100では、上述のように、支持部32が屈曲部33を有することにより、支持部が屈曲部を有さない場合(例えば、支持部が基板の厚み方向からの平面視で直線状に形成されている場合)と比べて、梁部34の剛性を高めることができる。したがって、梁部34の長さLに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0051】
MEMS振動子100では、梁部34は、支持部32と接する第1面34aと、第1面34aと反対側に位置し、第1面34aに沿う形状を有する第2面34bと、を有し、第1面34aは、基板10の厚み方向からの平面視で第1半径R1を有する円弧A1の形状を有し、第2面34bは、基板10の厚み方向から平面視で第1半径R1よりも小さい第2半径R2を有する円弧A2の形状を有している。言い換えると、梁部34の一端は、基板10の厚み方向からの平面視で第1半径R1を有する円弧の形状を有し、梁部34の他端は、基板10の厚み方向からの平面視で第1半径R1よりも小さい第2半径R2を有する円弧A2の形状を有している。これにより、副振動の周波数を主振動の周波数から離すことができる。ここで、副振動とは、主振動(必要とする振動)以外のMEMS振動子が持っている振動をいう。副振動の周波数が主振動の周波数に近い場合、意図しない周波数で発振がおこり、所望の周波数特性が得られないことがある。MEMS振動子100では、副振動の周波数を主振動の周波数から離すことができるため、副振動を抑制することができる。理由については、後述する実験例で説明する。
【0052】
MEMS振動子100では、第1電極20は、支持部32の側面32aと対向する第1側面20aと、第1側面20aとは反対側に位置し、第1側面20aに沿う形状を有する第2側面20bと、を有し、第1側面20aは、基板10の厚み方向からの平面視で第1半径R1よりも小さく第2半径R2よりも大きい第3半径R3を有する円弧A3の形状を有し、第2側面20bは、基板10の厚み方向からの平面視で第2半径R2よりも小さい第4半径R4を有する円弧A4の形状を有する。これにより、第1電極20と第2電極30との交差面積(両電極が重なる領域の面積)を維持しつつ、第1電極20の面積(基板10の厚み方向からみた第1電極20の大きさ)を小さくすることができる。したがって、第1電極20と基板10との間の寄生容量を小さくすることができる。
【0053】
MEMS振動子100では、第2電極30の梁部34が、図1に示すように基板10の厚み方向からの平面視で、支持部32側の第1面34aから先端側の第2面34bに向かうにしたがって窄まる形状を有している。これにより、梁部34には、振動時に、圧縮方向の力が加わるため、第2電極30を構成するポリシリコンの結晶粒に対して互いに密着する方向の力が加わる。したがって、振動時における梁部34の強度を高めることができ、信頼性を向上できる。
【0054】
MEMS振動子100では、上述したように、第2電極30の支持部32に屈曲部33を設けることにより、梁部34の剛性を高めて、製造誤差による周波数のずれを低減できる。したがって、例えば、製造工程において、梁部34の周波数をあわせこむための工程が不要となり、容易に所望の周波数を高い精度で得ることができる。
【0055】
1.2. MEMS振動子の実験例
次に、第1実施形態に係るMEMS振動子の実験例について、図面を参照しながら説明する。具体的には、本実施形態に係るMEMS振動子100をモデル化したモデルM1におけるシミュレーションについて説明する。
【0056】
(1)モデルの構成
図3は、シミュレーションに用いたモデルM1を、模式的に示す平面図である。モデルM1では、第1面34aは、基板10の厚み方向からの平面視で第1半径R1を有する円弧A1の形状を有し、第2面34bは、基板10の厚み方向からみて第1半径R1よりも小さい第2半径R2を有する円弧A2の形状を有している。円弧A1および円弧A2は、中心Oを中心とする半円である。モデルM1では、梁部34の長さLが4.0μm、中心角βが180°、円弧A3の半径(中心Oと第1側面20aとの間の距離)が、9.95μm、第1電極20と第2電極30との交差面積(両電極が重なる領域の面積)が99.9μm2である。
【0057】
図4は、比較例として用いたモデルM2を、模式的に示す平面図である。モデルM2では、支持部1032が屈曲部を有しておらず、支持部1032が基板1010の厚み方向からの平面視で直線状に形成されている。梁部1034は、基板1010の厚み方向からの平面視で長方形である。梁部1034の長さLが3.788μm、梁部1034の幅Wが30μm、第1電極1020と第2電極1030との交差面積(両電極が重なる領域の面積)が113.64μm2である。なお、梁部の厚みは、モデルM1、モデルM2とも同じである。また、モデルM1およびモデルM2の材質は、シリコンとした。
【0058】
以上のようなモデルM1,M2において、主振動および副振動の周波数を求めた。
【0059】
(2)シミュレーション結果
図5は、モデルM1およびモデルM2のシミュレーションの結果を示す表である。図5において副振動1とは、主振動の周波数に最も近い周波数にピークを持つ副振動であり、副振動2とは、副振動1の次に主振動の周波数に近い周波数にピークを持つ副振動である。
【0060】
図5に示すように、モデルM1において、主振動と副振動1との差は、3.34MHzであり、主振動と副振動2との差は、12.23MHzであった。これに対し、モデルM2では、主振動と副振動1との差は、1.24MHzであり、主振動と副振動2との差は、4.98MHzであった。このように、モデルM1は、モデルM2と比べて、副振動の周波数が、主振動の周波数と離れていることがわかった。
【0061】
したがって、MEMS振動子100では、副振動の周波数を主振動の周波数から離すことができることがわかった。
【0062】
1.3. MEMS振動子の製造方法
次に、本実施形態に係るMEMS振動子の製造方法について、図面を参照しながら説明する。図6〜図8は、本実施形態に係るMEMS振動子100の製造工程を模式的に示す断面図である。
【0063】
図6に示すように、支持基板12上に、第1下地層14および第2下地層16をこの順で形成して、基板10を得る。第1下地層14は、例えば、STI(Shallow Trench Isolation)法、LOCOS法により形成される。第2下地層16は、例えば、CVD(Chemical Vapor Deposition)法、スパッタ法により形成される。
【0064】
次に、基板10上に、第1電極20を形成する。より具体的には、第1電極20は、CVD法やスパッタ法などによって成膜された後、フォトリソグラフィー技術およびエッチング技術によるパターニングによって形成される。次に、例えば多結晶シリコンからなる第1電極20に対して、導電性を付与するために所定の不純物(例えばボロン)をドーピングする。
【0065】
図7に示すように、第1電極20を覆うように犠牲層40を形成する。犠牲層40は、例えば、第1電極20を熱酸化することにより形成される。犠牲層40の材質は、例えば、酸化シリコンである。犠牲層40の厚みは、例えば、0.01μm以上100μm以下である。犠牲層40の厚みによって、第1電極20と梁部34との間の距離が決定される。
【0066】
図8に示すように、犠牲層40上および基板10上に、第2電極30を形成する。より具体的には、第2電極30は、CVD法やスパッタ法などによって成膜された後、フォトリソグラフィー技術およびエッチング技術によるパターニングによって形成される。次に、多結晶シリコンからなる第2電極30に対して、導電性を付与するために所定の不純物(例えばボロン)をドーピングする。以上の工程により、支持部32、梁部34、および固定部36を有する第2電極30が形成される。第2電極30は、一定の膜厚を有する犠牲層40上に形成されるため、支持部32の側面32aは、第1電極20の第1側面20aに沿う形状を有する。
【0067】
図2に示すように、犠牲層40を除去する(リリースエッチング工程)。犠牲層40の除去は、例えば、フッ化水素酸や緩衝フッ酸(フッ化水素酸とフッ化アンモニウムとの混合液)などを用いたウェットエッチングより行われる。リリースエッチング工程において、第2下地層16は、エッチングストッパー層として機能することができる。
【0068】
以上の工程により、MEMS振動子100を製造することができる。
【0069】
MEMS振動子100の製造方法によれば、上述のとおり、周波数精度の高いMEMS振動子100を形成することができる。
【0070】
1.4. MEMS振動子の変形例
次に、第1実施形態の変形例に係るMEMS振動子について、図面を参照しながら説明する。図9は、第1実施形態の変形例に係るMEMS振動子101を模式的に示す断面図である。なお、図9は、図2に対応している。以下、本実施形態の変形例に係るMEMS振動子200において、MEMS振動子100の構成部材と同様の機能を有する部材については同一の符号を付し、その詳細な説明を省略する。
【0071】
MEMS振動子100の例では、図2に示すように、第2電極30の支持部32は、垂線Pに沿って形成されていた。これに対し、MEMS振動子101では、図9に示すように、第2電極30の支持部32は、基板10から垂線Pに対して傾いて形成されている。図示の例では、基板10の表面11と支持部32の側面32aとがなす角度は、鋭角である。また、第1電極20の第1側面20aは、支持部32の側面32aに沿って形成されており、側面32aと同様に、垂線Pに対して傾いている。
【0072】
MEMS振動子101によれば、MEMS振動子100と同様に、支持部32が屈曲部33を有しているため、梁部34の剛性を高めることができる。したがって、梁部34の長さLに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0073】
2. 第2実施形態
次に、第2実施形態に係るMEMS振動子について、図面を参照しながら説明する。図10は、第2実施形態に係るMEMS振動子200を模式的に示す平面図である。なお、図10は、図1に対応している。また、図10では、便宜上、第2電極30の固定部36の図示を省略している。以下、本実施形態の変形例に係るMEMS振動子200において、MEMS振動子100の構成部材と同様の機能を有する部材については同一の符号を付し、その詳細な説明を省略する。
【0074】
MEMS振動子200では、第2電極30の平面形状は、中心Oを中心とし半径R1を有する半円形状である。梁部34の第1面34aは、基板10の厚み方向からの平面視で半円形状を有している。第1面34aは、支持部32の側面32aと接している。また、第1電極20の平面形状は、中心Oを中心とし半径R1よりも小さい半径R3を有する半円形状の領域を含む形状を有している。第1電極20の第1側面20aは、基板10の厚み方向からの平面視で、半径R3を有する円弧の形状を有している。第1側面20aの一部は、第1面34aに沿って形成されている。
【0075】
MEMS振動子200によれば、MEMS振動子100と同様に、支持部32が屈曲部33を有しているため、梁部34の剛性を高めることができる。したがって、梁部34の長さLに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0076】
なお、MEMS振動子200の製造方法は、上述したMEMS振動子100の製造方法と同様であり、その説明を省略する。
【0077】
3. 第3実施形態
次に、第3実施形態に係るMEMS振動子について、図面を参照しながら説明する。図11は、第3実施形態に係るMEMS振動子300を模式的に示す平面図である。図12は、MEMS振動子300を模式的に示す断面図である。なお、図12は、図11のXII−XII線断面図である。また、図11では、便宜上、第2電極30の固定部36の図示を省略している。以下、本実施形態の変形例に係るMEMS振動子300において、MEMS振動子100の構成部材と同様の機能を有する部材については同一の符号を付し、その詳細な説明を省略する。
【0078】
MEMS振動子100の例では、図1に示すように基板10の厚み方向からの平面視で、第1電極20の第1側面20aは、第3半径R3を有する円弧A3の形状を有し、第1電極20の第2側面20bは、第3半径R3よりも小さい第4半径R4を有する円弧A4の形状を有していた。
【0079】
これに対し、MEMS振動子300では、図11に示すように基板10の厚み方向からの平面視で、第1電極20の第1側面20aは、第3半径R3を有する円弧A3の形状を有し、第1電極20の第2側面20bは、第3半径R3よりも大きい第4半径R4を有する円弧A4の形状を有している。
【0080】
また、MEMS振動子100の例では、図1に示すように基板10の厚み方向からの平面視で、第2電極30の第1面34aは、第1半径R1を有する円弧A1の形状を有し、第2電極30の第2面34bは、第1半径R1よりも小さい第2半径R2を有する円弧A2の形状を有していた。
【0081】
これに対し、MEMS振動子300では、図11に示すように基板10の厚み方向からの平面視で、第2電極30の第1面34aは、第1半径R1を有する円弧A1の形状を有し、第2電極30の第2面34bは、第1半径R1よりも大きい第2半径R2を有する円弧A2の形状を有している。
【0082】
MEMS振動子300において、円弧A1の半径(第1半径)R1は、他の円弧A2,A3,A4の半径R2,R3,R4よりも小さい。円弧A2の半径(第2半径)R2は、半径R4よりも小さく半径R3よりも大きい。円弧A3の半径(第3半径)R3は、半径R2よりも小さく半径R1よりも大きい。円弧A4の半径(第4半径)R4は、他の円弧A1,A2,A3の半径R1,R2,R3よりも大きい。
【0083】
MEMS振動子300によれば、MEMS振動子100と同様に、支持部32が屈曲部33を有しているため、梁部34の剛性を高めることができる。したがって、梁部34の長さLに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0084】
また、MEMS振動子300によれば、第2電極30の梁部34が、図11に示すように基板10の厚み方向からの平面視で、支持部32側の第1面34aから梁部34の先端側の第2面34bに向かうにしたがって広がる(円弧A1,A2に沿う方向の大きさが大きくなる)形状を有している。これにより、上述した犠牲層40(図8参照)を除去するためのリリースエッチング工程において、例えば、MEMS振動子100の例と比べて、エッチング液が第1電極20と第2電極30との間に入り込みやすいため、犠牲層40の除去が容易である。したがって、例えば、エッチング時間の短縮を図ることができる。また、リリース不足を解消でき、歩留まりを向上させることができる。
【0085】
なお、MEMS振動子300の製造方法は、上述したMEMS振動子100の製造方法と同様であり、その説明を省略する。
【0086】
4. 第4実施形態
次に、第4実施形態に係るMEMS振動子について、図面を参照しながら説明する。図13は、第4実施形態に係るMEMS振動子400を模式的に示す平面図である。図14は、MEMS振動子400を模式的に示す断面図である。なお、図14は、図13のXIV−XIV線断面図である。また、図13では、便宜上、第2電極30の固定部36の図示を省略している。以下、本実施形態の変形例に係るMEMS振動子400において、MEMS振動子100の構成部材と同様の機能を有する部材については同一の符号を付し、その詳細な説明を省略する。
【0087】
MEMS振動子100の例では、第2電極30の支持部32は、図1に示すように、支持部32全体が1つの屈曲部33であった。
【0088】
これに対し、MEMS振動子400の例では、第2電極30の支持部32は、図13に示すように、複数の屈曲部33を有している。支持部32は、図示の例では、2つの屈曲部33−1,33−2を有している。
【0089】
支持部32は、図13に示すように、第1直線部431と、第2直線部432と、第3直線部433と、第1屈曲部33−1と、第2屈曲部33−2と、を有している。ここで、直線部とは、基板10の厚み方向からの平面視で直線状に形成されている部分をいう。第1屈曲部33−1は、第1直線部431と第2直線部432とを接続し、第2屈曲部33−2は、第2直線部432と第3直線部433とを接続している。図示の例では、第1直線部431と第2直線部432とがなす角度(第1屈曲部33−1の角度)は、90°である。また、第2直線部432と第3直線部433とがなす角度(第2屈曲部33−2の角度)は、90°である。なお、2つの直線部がなす角度(屈曲部の角度)はこれに限定されず、任意の角度に設定されることができる。
【0090】
梁部34は、屈曲部33−1,33−2および直線部431,432,433から延出している。言い換えると、支持部32の側面32aは、屈曲部33−1,33−2に対応する形状の屈曲部および直線部431,432,433に対応する形状の直線部を有している。そのため、梁部34は、支持部32と同様に、屈曲している。
【0091】
MEMS振動子400によれば、MEMS振動子100と同様に、支持部32が屈曲部33−1,33−2を有しているため、梁部34の剛性を高めることができる。したがって、梁部34の長さLに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0092】
また、MEMS振動子400によれば、屈曲部33−1,33−2が、所定の角度(図示の例では90°)で形成されており、例えば、MEMS振動子100の例のように、曲線状(円弧状)に形成されていないため、設計や製造が容易である。
【0093】
なお、MEMS振動子400の製造方法は、上述したMEMS振動子100の製造工程と同様であり、その説明を省略する。
【0094】
5. 第5実施形態
次に、第5実施形態に係るMEMS振動子について、図面を参照しながら説明する。図15は、第5実施形態に係るMEMS振動子500を模式的に示す平面図である。図16は、MEMS振動子500を模式的に示す断面図である。なお、図16は、図15のXVI−XVI線断面図である。また、図15では、便宜上、第2電極30の固定部36の図示を省略している。以下、本実施形態の変形例に係るMEMS振動子500において、MEMS振動子100,400の構成部材と同様の機能を有する部材については同一の符号を付し、その詳細な説明を省略する。
【0095】
MEMS振動子100の例では、第2電極30の支持部32は、図1に示すように、支持部32全体が1つの屈曲部33であった。
【0096】
これに対し、MEMS振動子500では、第2電極30の梁部34は、図15および図16に示すように、2つの直線部431,432と、1つの屈曲部33と、を有している。
【0097】
屈曲部33は、2つの直線部431,432を接続している。2つの直線部431,432がなす角度(屈曲部33の角度)は、例えば、100°である。なお、2つの直線部431,432がなす角度はこれに限定されず、任意の角度に設定されることができる。図示の例では、支持部32および梁部34の平面形状は、V字型である。支持部32から延出している梁部34は、支持部32と同様に屈曲している。
【0098】
MEMS振動子500によれば、MEMS振動子100と同様に、支持部32が屈曲部33を有しているため、梁部34の剛性を高めることができる。したがって、梁部34の長さLに対する製造誤差の割合を小さくすることができ、製造誤差による周波数のずれを低減できる。
【0099】
また、MEMS振動子500によれば、屈曲部33が、屈曲部33が、所定の角度(図示の例では100°)で形成されており、例えば、MEMS振動子100の例のように、屈曲部33が、曲線状(円弧状)に形成されていないため、設計や製造が容易である。
【0100】
なお、MEMS振動子500の製造方法は、上述したMEMS振動子100の製造工程と同様であり、その説明を省略する。
【0101】
6. 第6実施形態
次に、第6実施形態に係る発振器について、図面を参照しながら説明する。図17は、第6実施形態に係る発振器600を示す回路図である。
【0102】
発振器600は、図17に示すように、本発明に係るMEMS振動子(例えばMEMS振動子100)と、反転増幅回路(回路部)610と、を含む。
【0103】
MEMS振動子100は、第1電極20に電気的に接続された第1端子100aと、第2電極30に電気的に接続された第2端子100bと、を有している。MEMS振動子100の第1端子100aは、反転増幅回路610の入力端子610aと少なくとも交流的に接続する。MEMS振動子100の第2端子100bは、反転増幅回路610の出力端子610bと少なくとも交流的に接続する。
【0104】
反転増幅回路610は、所望の発振条件が満たされるように、複数のインバーター(反転回路)や増幅回路を組み合わせて構成されていてもよい。図17に示す例では、反転増幅回路610は、入力端子610aから出力端子610bに向かって順に、インバーター612、インバーター614、インバーター616が直列に接続されて構成されている。
【0105】
発振器600は、反転増幅回路610に対する帰還抵抗を含んで構成されていてもよい。図17に示す例では、インバーター612の入力端子と出力端子とが抵抗620を介して接続され、インバーター614の入力端子と出力端子とが抵抗622を介して接続され、インバーター616の入力端子と出力端子とが抵抗624を介して接続されている。
【0106】
発振器600は、反転増幅回路610の入力端子610aと基準電位(接地電位)との間に接続された第1キャパシター630と、反転増幅回路610の出力端子610bと基準電位(接地電位)との間に接続された第2キャパシター632と、を含んで構成されている。これにより、MEMS振動子100とキャパシター630,632とで共振回路を構成する発振回路とすることができる。発振器600は、この発振回路で得られた発振信号fを出力する。
【0107】
発振器600を構成するトランジスターやキャパシター(図示せず)等の素子は、例えば、基板10上に(図1参照)形成されていてもよい。これにより、MEMS振動子100と反転増幅回路610をモノリシックに形成することができる。
【0108】
発振器600を構成するトランジスター等の素子を基板10上に形成する場合、発振器600を構成するトランジスター等の素子を、上述したMEMS振動子100を形成する工程と同一の工程で形成してもよい。具体的には、犠牲層40を形成する工程において(図7参照)、トランジスターのゲート絶縁層を形成してもよい。さらに、第2電極30を形成する工程において(図8参照)、トランジスターのゲート電極を形成してもよい。このように、MEMS振動子100の製造工程と発振器600を構成するトランジスター等の素子の製造工程を共通化することで、製造工程の簡素化を図ることができる。
【0109】
発振器600によれば、周波数精度の高いMEMS振動子100を含む。そのため、発振器600は、周波数精度の高い信号を出力することができる。
【0110】
発振器600は、図18に示すように、さらに、分周回路640を有していてもよい。分周回路640は、発振回路の出力信号Voutを分周し、発振信号fを出力する。これにより、発振器600は、例えば、出力信号Voutの周波数よりも低い周波数の出力信号を得ることができる。
【0111】
なお、上述した実施形態及び変形例は一例であって、これらに限定されるわけではない。例えば各実施形態及び各変形例は、複数を適宜組み合わせることが可能である。
【0112】
本発明は、実施の形態で説明した構成と実質的に同一の構成(例えば、機能、方法及び結果が同一の構成、あるいは目的及び効果が同一の構成)を含む。また、本発明は、実施の形態で説明した構成の本質的でない部分を置き換えた構成を含む。また、本発明は、実施の形態で説明した構成と同一の作用効果を奏する構成又は同一の目的を達成することができる構成を含む。また、本発明は、実施の形態で説明した構成に公知技術を付加した構成を含む。
【符号の説明】
【0113】
A1、A2,A3,A4 円弧、R1 第1半径、R2 第2半径、R3 第3半径、
R4 第4半径、L 梁部の長さ、M1,M2 モデル、O 中心、P 垂線、
α,β 中心角、10 基板、11 表面、12 支持基板、14 第1下地層、
16 第2下地層、20 第1電極、20a 第1側面(第3面)、
20b 第2側面(第4面)、30 第2電極、32 支持部、32a 側面、
33,33−1,33−2 屈曲部、34 梁部、34a 第1面、34b 第2面、
36 固定部、40 犠牲層、
100,101,200,300,400 MEMS振動子、431 第1直線部、
432 第2直線部、433 第3直線部、500 MEMS振動子、
600 発振器、610 反転増幅回路、610a 入力端子、610b 出力端子、
612,614,616 インバーター、620,622,624 抵抗、
630 第1キャパシター、632 第2キャパシター、1010 基板、
1020 第1電極、1030 第2電極、1032 支持部、1034 梁部
【特許請求の範囲】
【請求項1】
基板と、
前記基板の上方に配置された第1電極と、
少なくとも一部が前記第1電極との間に空隙を有した状態で配置され、前記基板の厚み方向に静電力によって振動可能となる梁部、および前記梁部の一端を支持し前記基板の上方に配置された支持部を有する第2電極と、
を含み、
前記一端を支持する前記支持部の支持側面は、前記基板の厚み方向からの平面視で屈曲している屈曲部を有し、
前記一端は、前記屈曲部を含む前記支持側面により支持されている、MEMS振動子。
【請求項2】
請求項1において、
前記屈曲部は、前記基板の厚み方向からの平面視で円弧の形状を有している、MEMS振動子。
【請求項3】
請求項2において、
前記一端は、前記基板の厚み方向からの平面視で第1半径を有する円弧の形状を有し、
前記梁部の他端は、前記基板の厚み方向からの平面視で前記第1半径よりも小さい第2半径を有する円弧の形状を有している、MEMS振動子。
【請求項4】
請求項3において、
前記第1電極は、
前記支持部の前記支持側面と対向する第1側面と、
前記第1側面とは反対側に位置し、前記第1側面に沿う形状を有する第2側面と、
を有し、
前記第1側面は、前記基板の厚み方向からの平面視で前記第1半径よりも小さく前記第2半径よりも大きい第3半径を有する円弧の形状を有し、
前記第2側面は、前記基板の厚み方向からの平面視で前記第2半径よりも小さい第4半径を有する円弧の形状を有する、MEMS振動子。
【請求項5】
請求項1ないし3のいずれか1項において、
前記第1電極は、前記支持部の前記支持側面と対向する第1側面を有し、
前記第1側面は、前記支持部の前記支持側面に沿う形状を有している、MEMS振動子。
【請求項6】
請求項1において、
前記支持部の前記支持側面は、前記基板の厚み方向からの平面視において直線部をさらに有する、MEMS振動子。
【請求項7】
請求項1ないし6のいずれか1項に記載のMEMS振動子と、
前記MEMS振動子の前記第1電極および前記第2電極と電気的に接続された回路部と、
を含む発振器。
【請求項1】
基板と、
前記基板の上方に配置された第1電極と、
少なくとも一部が前記第1電極との間に空隙を有した状態で配置され、前記基板の厚み方向に静電力によって振動可能となる梁部、および前記梁部の一端を支持し前記基板の上方に配置された支持部を有する第2電極と、
を含み、
前記一端を支持する前記支持部の支持側面は、前記基板の厚み方向からの平面視で屈曲している屈曲部を有し、
前記一端は、前記屈曲部を含む前記支持側面により支持されている、MEMS振動子。
【請求項2】
請求項1において、
前記屈曲部は、前記基板の厚み方向からの平面視で円弧の形状を有している、MEMS振動子。
【請求項3】
請求項2において、
前記一端は、前記基板の厚み方向からの平面視で第1半径を有する円弧の形状を有し、
前記梁部の他端は、前記基板の厚み方向からの平面視で前記第1半径よりも小さい第2半径を有する円弧の形状を有している、MEMS振動子。
【請求項4】
請求項3において、
前記第1電極は、
前記支持部の前記支持側面と対向する第1側面と、
前記第1側面とは反対側に位置し、前記第1側面に沿う形状を有する第2側面と、
を有し、
前記第1側面は、前記基板の厚み方向からの平面視で前記第1半径よりも小さく前記第2半径よりも大きい第3半径を有する円弧の形状を有し、
前記第2側面は、前記基板の厚み方向からの平面視で前記第2半径よりも小さい第4半径を有する円弧の形状を有する、MEMS振動子。
【請求項5】
請求項1ないし3のいずれか1項において、
前記第1電極は、前記支持部の前記支持側面と対向する第1側面を有し、
前記第1側面は、前記支持部の前記支持側面に沿う形状を有している、MEMS振動子。
【請求項6】
請求項1において、
前記支持部の前記支持側面は、前記基板の厚み方向からの平面視において直線部をさらに有する、MEMS振動子。
【請求項7】
請求項1ないし6のいずれか1項に記載のMEMS振動子と、
前記MEMS振動子の前記第1電極および前記第2電極と電気的に接続された回路部と、
を含む発振器。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】

【図7】

【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】

【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2013−30905(P2013−30905A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−164378(P2011−164378)
【出願日】平成23年7月27日(2011.7.27)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月27日(2011.7.27)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]