
MIMOレーダシステム、送信装置、受信装置及びMIMOレーダ信号処理方法
【課題】 複数のレーダ装置が遠隔に配置されている場合であっても、各レーダ装置で受信された受信信号を同一の成分同士で処理可能なMIMOレーダシステムと、このシステムで用いられる送信装置、受信装置及びMIMOレーダ信号処理方法とを提供する。
【解決手段】 MIMOレーダシステムは、複数の送信装置と、複数の受信装置と、処理サーバとを具備する。送信装置は、送信信号を送信する。受信装置は、原点及び直交軸をそれぞれが共有し、送信信号が目標で反射等された目標反射波を受信する。受信装置は、極座標信号生成部と、信号処理部と、6次元セルデータ処理部とを備える。極座標信号生成部は、目標反射波に基づいて極座標信号を生成する。信号処理部は、極座標信号を、6次元セルデータに変換する。6次元セルデータ処理部は、6次元セルデータを統合して受信結果を取得する。処理サーバは、前記複数の受信装置からの受信結果に基づいて目標を検知する。
【解決手段】 MIMOレーダシステムは、複数の送信装置と、複数の受信装置と、処理サーバとを具備する。送信装置は、送信信号を送信する。受信装置は、原点及び直交軸をそれぞれが共有し、送信信号が目標で反射等された目標反射波を受信する。受信装置は、極座標信号生成部と、信号処理部と、6次元セルデータ処理部とを備える。極座標信号生成部は、目標反射波に基づいて極座標信号を生成する。信号処理部は、極座標信号を、6次元セルデータに変換する。6次元セルデータ処理部は、6次元セルデータを統合して受信結果を取得する。処理サーバは、前記複数の受信装置からの受信結果に基づいて目標を検知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、MIMO(Multiple-Input Multiple-Output)方式を用いたMIMOレーダシステムと、このシステムで用いられる送信装置、受信装置及びMIMOレーダ信号処理方法とに関する。
【背景技術】
【0002】
複数のレーダ装置で電波を送信し、複数のレーダ装置で電波を受信することで、ダイバーシティ利得を向上させる方式としてMIMOレーダシステムと呼ばれるレーダシステムが提案されている。MIMOレーダシステムにおけるレーダ装置は、電波を所定の方式により変調した後に空間へ送信することで、送信する電波が他のレーダ装置からの電波と互いに無相関となるようにしている。これにより、レーダ装置は、受信時に各レーダ装置からの信号を分離することが可能になる。
【0003】
ところで、レーダ装置は、目標で反射・散乱・回折した電波に基づいて、目標までの距離及び方向を推定する。また、レーダ装置は、受信波のドップラ周波数に基づいて、目標の相対速度を推定する。ここで、複数のレーダ装置が遠隔に配置されている場合、目標までの距離及び方向と、目標の相対速度とはレーダ装置毎に異なることとなる。
【0004】
このため、複数のレーダ装置により目標を探知する場合、各レーダ装置での受信信号を、距離、方向及び相対速度のそれぞれの成分毎に足し合わせて処理することは不可能である。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】E. Fisher, A. H. Heimovich, "Spatial diversity in radar - models and detection Performance", IEEE Trans. On Signal Processing, vol. 54, no. 3, pp. 823-838
【非特許文献2】E. Fisher, A. H. Heimovich, "Performance of MIMO Radar System: Advantages of Angular Diversity", IEEE Trans. On Signal Processing, 2004
【発明の概要】
【発明が解決しようとする課題】
【0006】
以上のように、従来のMIMOレーダシステムでは、複数のレーダ装置が遠隔に配置されている場合、各レーダ装置で受信された受信信号を、距離、方向及び相対速度のそれぞれの成分毎に積分することはできないという問題がある。
【0007】
そこで目的は、複数のレーダ装置が遠隔に配置されている場合であっても、各レーダ装置で受信された受信信号を同一の成分同士で処理可能なMIMOレーダシステムと、このシステムで用いられる送信装置、受信装置及びMIMOレーダ信号処理方法とを提供することにある。
【課題を解決するための手段】
【0008】
実施形態によれば、MIMOレーダシステムは、複数の送信装置と、複数の受信装置と、処理サーバとを具備する。送信装置は、互いに無相関となるように変調された送信信号を空間へ向けて送信する。受信装置は、原点及び直交軸をそれぞれが共有し、前記空間へ向けて送信された複数の送信信号が前記空間中の目標で反射・散乱・回折された複数の目標反射波を受信する。受信装置は、極座標信号生成部と、信号処理部と、6次元セルデータ処理部とを備える。極座標信号生成部は、前記受信した複数の目標反射波それぞれに基づいて、前記目標の位置を極座標系で表した複数の極座標信号を生成する。信号処理部は、前記複数の極座標信号それぞれを、前記原点及び直交軸を利用したデカルト座標系により表した複数の6次元セルデータに変換する。6次元セルデータ処理部は、前記複数の6次元セルデータを統合することで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得する。処理サーバは、前記複数の受信装置それぞれからの受信結果に基づいて前記目標を検知する。
【図面の簡単な説明】
【0009】
【図1】第1の実施形態に係るMIMOレーダシステムの機能構成を示すブロック図である。
【図2】図1の送信装置から送信される送信信号を示す図である。
【図3】図1の受信装置の機能構成を示すブロック図である。
【図4】図3のパルス圧縮部での処理を示す図である。
【図5】図3のドップラフィルタ処理部での処理を示す図である。
【図6】図3の空間処理部での処理を示す図である。
【図7】図3の信号処理部での処理を示す図である。
【図8】図1のMIMOレーダシステムが目標を検知する際のフローチャートを示す図である。
【図9】第2の実施形態に係わるMIMOレーダシステムの機能構成を示すブロック図である。
【図10】図9の受信装置の機能構成を示すブロック図である。
【図11】図9のMIMOレーダシステムが目標を検知する際のフローチャートを示す図である。
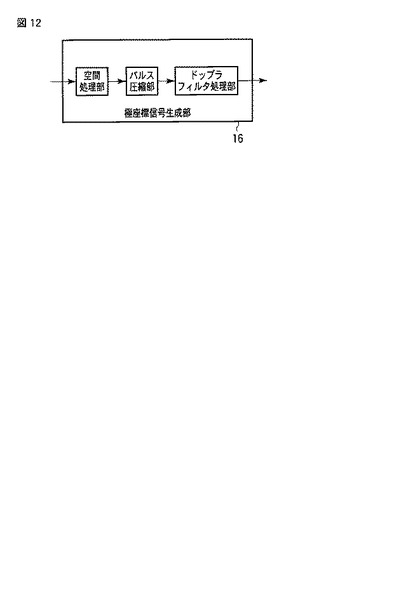
【図12】図3の極座標信号生成部の構成のその他の例を示す図である。
【発明を実施するための形態】
【0010】
以下、実施の形態について、図面を参照して説明する。
【0011】
(第1の実施形態)
図1は、第1の実施形態に係るMIMOレーダシステムの機能構成を示すブロック図である。図1に示すMIMOレーダシステムは、送信装置TX1〜TXR、受信装置RX1〜RXR及び処理サーバ20を具備する。
【0012】
はじめに、図1に示す送信装置TX1〜TXRによる電波の送信形態、及び、受信装置RX1〜RXRによる電波の受信形態について定義する。なお、以下では、送信信号が目標で反射・散乱・回折された電波を目標反射波と称する。
【0013】
バイスタティックレーダでは、送信源と受信点とが隔離して配置されるので、送信ビームと受信ビームとが会合する領域からの目標反射波しか受信することができない。このため、モノスタティックレーダ動作に比較してレーダ領域を捜索するのに要する時間は多大なものとなる。このような欠点を解決するため、受信動作は多数のビームを形成するマルチビーム方式を採用することが考えられる。このように受信ビームを増やせば、1回の送信ビームに対して広範囲な領域から反射波を同時に受信することができるようになるため、捜索時間を短縮することができる。
【0014】
一方、MIMOレーダシステムも同様に、複数の送信ビームと受信ビームが空間で会合する領域からは目標反射波を受信することができる。ただし、上述したとおり、このような方式で捜索するのに要する時間は多大なものとなる。そこで、捜索効率の観点から、本実施形態に係る受信装置RX1〜RXRの受信動作は多数のビームを形成するマルチビーム方式を採用する。また、本実施形態に係る送信装置TX1〜TXRの送信動作は特別なビーム走査を行うものとはせず、送信装置TX1〜TXR及び受信装置RX1〜RXRは、所定のビーム走査プログラムに従った方向に対して連続的にビーム走査する方式を採用する。
【0015】
まず、送信装置TX1〜TXRが送信する送信信号について説明する。
【0016】
送信装置TX1〜TXRの位置ベクトルpiは、3次元のデカルト座標系を用いて以下のように表される。
【数1】

【0017】
ただし、xi,yi,zi(i=1〜R)は、送信装置TXiのx座標、y座標、z座標の位置をそれぞれ表し、Tはベクトルの転置を表す。
【0018】
送信装置TX1〜TXRは、通常のレーダシステムと同様に、複数回同一のパルス信号を送信する。送信装置TX1〜TXRの送信器は、デジタル−アナログ変換器、周波数変換器、フィルタ、増幅器及びアンテナ等を備える一般的な送信器である。各送信装置TX1〜TXRは、お互いに無相関となるように周波数変調又は符号化変調されたパルス信号を送信する。
【0019】
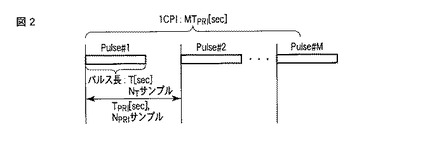
本実施形態では、送信信号をsi[n]とおく。ただし、si[n]は、i番目の送信装置が送信するパルス信号が帯域幅W[Hz]で離散化された信号とする。また、1周期におけるパルス信号の送信時間をT[sec]とし、T[sec]の間のサンプル数をNTとおく。また、パルス信号の繰り返し周波数をfPRF[Hz]、繰り返し周期をTPRI[sec](TPRI=1/fPRF)とおき、繰り返し周期TPRI[sec]の間のサンプル数をNPRIとおく。ここで、送信パルス数をMとおくと、m番目のパルス信号におけるn番目のレンジセルに相当する送信信号は以下のように表される。
【数2】
【0020】
図2は、第1の実施形態に係る送信装置TX1〜TXRから送信される送信信号の模式図を示す。
【0021】
送信装置TX1〜TXRは、上記送信信号をキャリア周波数fC、送信電力P(t)、送信アンテナ利得G(t)で送信するものとする。
【0022】
送信装置TX1〜TXRがパルス信号を繰り返し送信する時間間隔は、目標のレンジセルの移動と、目標の水平面方位角及び仰角の変化とを無視できる時間内に設計される。この時間間隔は、CPI(Coherent Processing Interval)(CPI=MTPRI[sec])と呼ばれる。送信装置TX1〜TXRは、CPI内では一定の方位角、仰角方向にビームを向けてパルス信号を送信するものとする。
【0023】
このように、送信装置TX1〜TXRは、CPI毎に異なる方位角及び仰角(またはいずれか一方の角度)にビームを走査してパルス信号を送信する。この結果、目標の方位角・仰角とビームを向けた方向とが一致した場合、目標に対して強いビームが照射されることになる。
【0024】
次に、受信装置RX1〜RXRで受信される受信信号について説明する。受信装置RX1〜RXRは、目標反射波を受信する。受信信号は、以下のように求められる。なお、受信装置RX1〜RXRの添え字は、j(j=1〜R)を用いて記述する。
【0025】
前述の通り、送信装置TX1〜TXRは、異なる位置に配置され、CPI毎に異なる方角にビームを向けて送信信号を送信している。そのため、送信装置TX1〜TXRが送信した全ての送信信号が同時に目標に照射されるとは限らない。また、送信装置TX1〜TXRが送信する送信信号は、互いに無相関であるため、受信装置RX1〜RXRは復調器により受信信号を送信源別に抽出することができる。
【0026】
ここで、目標の位置及び速度について以下に定義する。目標の位置及び速度は前述の通りそれぞれ3次元のデカルト座標系を用いて定義する。レンジセルnにおける目標の位置は以下のベクトルp(t)[n]を用いて表す。
【数3】
【0027】
ただし、x(t)[n],y(t)[n],z(t)[n]はレンジセルnにおける目標のx座標、y座標、z座標の位置を表す。
【0028】
同様に、レンジセルnにおける目標の速度は、3次元デカルト座標のベクトルv(t)[n]を用いて以下のように表される。
【数4】
【0029】
ただし、vx[n],vy[n],vz[n]はレンジセルnにおける目標のx座標の速度、y座標の速度、z座標の速度をそれぞれ表す。
【0030】
前述の通り、受信装置RX1〜RXRを遠隔に配置する場合、目標の方位角、仰角及び相対速度は受信装置RX1〜RXR毎に異なる。一方、式(3)及び(4)のようにデカルト座標を用いて目標の位置及び速度を定義すると、座標の原点及び直交基底ベクトルを受信装置RX1〜RXRが共有していれば、受信装置RX1〜RXRにおける目標の位置及び速度ベクトルが同一の値となる。
【0031】
次にRCS(Radar Cross Section)について考える。ステルス機のようにRCSの角度依存性が高い目標の場合、RCSは電波の入射方向と反射方向に依存し、受信装置RX1〜RXR毎に異なる値となる。また、目標の姿勢や向きに依存して入射角度は異なるため、RCSは次式のように表される。
【数5】
【0032】
ただし、θi(t)[n],φi(t)[n],θj(t)[n],φj(t)[n]は目標自身の方向及び姿勢を表しており、3次元座標におけるレンジセルnにおける送信装置TXiに対する電波の入射方向の仰角と方位角と、受信装置RXjに対する目標反射波の反射方向の仰角と方位角とをそれぞれ表す。なお、RCSが隣接する角度間で無相関だと仮定できる場合、式(5)のRCSの表記は、レンジセルnにおいて送信装置TXiからの送信信号に対する目標反射波を受信装置RXjで受信するとして以下のように簡略化することができる。
【数6】
【0033】
次に、受信装置RX1〜RXRの位置ベクトルpjも目標と同様に3次元のデカルト座標系を用いて以下のように表される。
【数7】
【0034】
ただし、xj,yj,zjは、受信装置RXjのx座標、y座標、z座標の位置をそれぞれ表している。また、受信装置RXjのアンテナ素子数をLjとし、各アンテナの位置を以下の3次元ベクトルで表す。
【数8】
【0035】
ここで、xj,l,yj,l,zj,lは,受信装置RXjのl番目のアンテナ素子のx座標、y座標、z座標の位置をそれぞれ表している。
【0036】
次に、受信装置RXjで受信される受信信号の伝搬遅延時間τjを求める。送信装置TXiと目標との距離は、式(1)を用いて次式で表される。
【数9】
【0037】
ただし、‖・‖は次式を満たすベクトルノルムである。目標の速度は次式で表わす。
【数10】
【0038】
ただし、
【数11】
【0039】
同様に、目標と受信装置RXjとの距離は次式で表すことができる。
【数12】
【0040】
よって、伝搬遅延時間τjは次式で表すことができる。
【数13】
【0041】
ただし、cは光速[m/sec]を表す。
【0042】
次に、受信信号が受けるドップラ周波数を示す。
【0043】
まずは、送信装置TXiから目標に到達する送信信号が受けるドップラ周波数について考える。目標の送信装置TXiに対する相対速度は、送信装置TXiと目標とを結ぶ単位ベクトルと式(4)に示した目標の速度ベクトルの内積に等しい。よって、目標に入射する送信信号が受けるドップラ周波数は次式で表される。
【数14】
【0044】
ここで、λは送信信号の波長を表している。
【0045】
同様に、受信装置RXjで受信される目標反射波が受けるドップラ周波数は次式で表すことができる。
【数15】
【0046】
最後に、受信装置RXjのアンテナ間で生じる受信信号の位相差について示す。目標と受信装置RXjのl番目のアンテナ間の経路長は以下の式で表すことができる。
【数16】
【0047】
よって、l番目の素子で生じる位相差は以下の式で表すことができる。
【数17】
【0048】
以上、式(1)〜式(17)で示した送信信号si[n]、伝搬遅延時間τj、目標の移動によるドップラ周波数fDi[n],fDj[n]、各アンテナで受信する信号の位相差を加味すると、送信装置TXiのl番目のアンテナで受信されるレンジセルnの受信信号は次式で表すことができる。
【数18】
【0049】
ただし、τ0は信号を送信してから受信処理を開始するまでのオフセットであり、zj,l[n]は受信装置RXjのl番目のアンテナで受信した受信信号に含まれるレンジセルnの熱雑音を表す。
【0050】
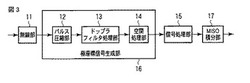
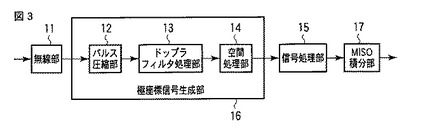
図3は、第1の実施形態に係る受信装置RX1〜RXRの機能構成を示すブロック図である。図3に示す受信装置RX1〜RXRは、無線部11、極座標信号生成部16、信号処理部15及びMISO(Multiple-Input Single-Output)積分部17を備える。
【0051】
無線部11は、アンテナ、周波数変換器及びアナログ−デジタル変換器等を備える。無線部11は、目標からの目標反射波を受信し、この信号をベースバンド帯のデジタル形式の信号に変換する。無線部11は、変換後の受信信号を極座標信号生成部16へ出力する。
【0052】
極座標信号生成部16は、パルス圧縮部12、ドップラフィルタ処理部13及び空間処理部14を備える。
【0053】
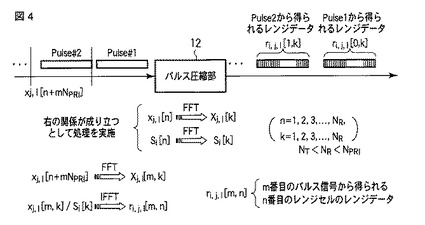
図4は、第1の実施形態に係るパルス圧縮部12での処理を示す模式図である。パルス圧縮部12は、無線部11からの受信信号をレンジデータに変換する。レンジデータとは、各レンジセルでの受信信号を、異なる伝搬遅延時間の信号となるように変換したものである。レンジデータは、伝搬路の熱雑音が無視できる場合、伝搬路のインパルス応答と等しくなる。式(2)に示した送信信号がインパルス性の強い孤立パルスの場合、受信信号がそのままレンジデータとなるため、特別な処理は必要ない。しかし、孤立パルスを送信信号として用いる場合、送信電力を高めるためにはピーク電力を高める必要があり、送信装置TX1〜TXR及び受信装置RX1〜RXRに広いダイナミックレンジを要求し、装置コストが増加する課題がある。そこで、本実施形態では、送信装置TX1〜TXRは、自己相関関数がインパルス信号に近い変調信号を送信信号として送信し、受信装置RX1〜RXRは、受信信号に対してパルス圧縮処理(相関処理)をするようにしている。この結果、パルス圧縮後の信号はインパルス信号を送信した場合と等価の信号が得られる。パルス圧縮部12は、この信号をレンジデータとする。一般に送信信号としてはチャープ信号やM系列等のPN符号が用いられる。
【0054】
以下に、式(2)の送信信号として変調信号が用いられた場合のパルス圧縮処理について示す。
【0055】
前述した通り、本実施形態では送信信号として周期TPRIでM回同一のパルス信号を送信することを想定しており、パルス圧縮処理は周期毎に適用する。ここではm番目の受信信号に対する処理について示す。まずは、m番目のパルス信号に対して得られる受信信号にFFTを適用し、周波数領域の信号に変換する。NfをFFTポイント数とすると、周波数領域における受信信号は次式で表される。
【数19】
【0056】
ここで、k=0〜Nf−1であり、FFTポイント数は受信信号の出力時系列ポイント数よりも大きいものとする。また、受信信号の系列はFFTポイント数Nfに合わせてその系列に0を付加する。なお、この処理は、一般的な零埋め処理である。
【0057】
ここで、送信されたパルス信号の伝搬は、伝搬路の遅延プロファイルをインパルス応答とした線形回路と等価とみなせる。そのため、受信信号は、送信信号と遅延プロファイルの畳込み処理によって得られるとみなすことができる。よって、受信信号は、周波数領域では送信信号の周波数応答と伝搬路の周波数伝達関数との積となる。よって、受信信号をFFTすることによって得られた周波数領域の信号に、送信信号の周波数伝達関数を除算することにより、伝搬路の周波数伝達関数を得ることができる。
【数20】
【0058】
なおSi[k]は、送信信号の周波数伝達関数であり、次式で表される。
【数21】
【0059】
この結果、式(20)の信号をIFFTすることによりレンジデータを得ることができる。
【数22】
【0060】
ただし、n=0〜Nf−1であり、ri,j,l[m,n]は、受信装置RXjのl番目のアンテナで受信した受信信号のうち、m番目のパルス信号から得られたn番目のレンジセルのレンジデータを表している。同様の処理を各送信装置TX1〜TXRが送信するパルス信号毎に適用し、m番目以外のパルス信号に対しても適用することにより、NRM個のパルス信号からレンジデータを得ることができる。
【0061】
なお、レンジセルデータは、送信装置TXiのビームが目標に向けられ、送信信号が目標に照射されたCPIでのみ信号成分を含み、そうでないCPIに対してはサイドローブレベルが十分に低いとみなせる場合、雑音成分のみが含まれる。生成されたレンジデータは、ドップラフィルタ処理部13へ出力される。
【0062】
図5は、第1の実施形態に係るドップラフィルタ処理部13における処理を模式的に示した図である。ドップラフィルタ処理部13は、k番目のレンジセルのデータを取得する場合、M個のパルス信号から得られるk番目のレンジデータにFFTを適用する。
【数23】
【0063】
ただし、m=0〜M−1である。上記処理を全てのレンジセル(n=1〜N)に対して適用し、この結果得られるRi,j,l[m,n]は、受信装置RXjのl番目のアンテナで得られるm番目のパルス信号のn番目のレンジセルのデータを表す。この信号の電力が閾値電力よりも大きい場合、受信装置RXjのl番目のアンテナには送信装置TXiから送信されたパルス信号m、レンジセルnのドップラ周波数の信号が到来していると検知される。今、信号のサンプリングレートをW[Hz]としており、オフセットとしてτ0サンプルを加えているため、レンジセルnのパルス信号は距離c・(n+τ0)/Wメートルに相当する。また、パルス信号の繰り返し周波数がfPRIなので、受信信号はmfPRI/M[Hz]のドップラ周波数を受けていることになる。ドップラフィルタ処理部13は、取得したレンジセルのデータを空間処理部14へ出力する。
【0064】
図6は、第1の実施形態に係る空間処理部14における処理を模式的に示した図である。空間処理部14は、受信装置RX1〜RXRが複数のアンテナを用いてデジタル信号を得ている場合は、デジタルビームフォーミングを適用する。これにより、空間処理部14は、ビームを向けた方位角及び仰角から入射する目標反射波を抽出することが可能である。
【0065】
ここで、受信装置RXjにおいて水平面方位角φ、仰角θにビームを形成するためのウエイトベクトルwj(θ,φ)を次式で定義する。
【数24】
【0066】
このように、各アンテナで受信した目標反射波が同相で合成されるようにウエイトを形成することによって、所望方向にビームを形成することができる。ウエイトは受信装置RX1〜RXR毎にアンテナの配置が異なれば、同一の方角にビームを形成する場合でも異なるウエイトとなる。また、同一のアレーアンテナを用いても装置の向きが異なればウエイトは異なる。受信装置RXjにおけるウエイトは式(8)に示した受信装置RXjのアンテナ配置を表すベクトルを用いて次式で表される。
【数25】
【0067】
ただし、
【数26】
【0068】
空間処理部14は、以上のウエイトを、ドップラフィルタ処理部13からのレンジセルのデータにパルス信号毎に乗算することで、目標反射波のうち、レンジセルn、パルス信号mの仰角θ、方位角φの信号yi,j(m,n,θ,φ)を抽出することができる。
【数27】
【0069】
ただし、
【数28】
【0070】
また、Hは複素共役転置を表す。空間処理部14は、抽出した極座標系の信号yi,j(m,n,θ,φ)を、信号処理部15へ出力する。
【0071】
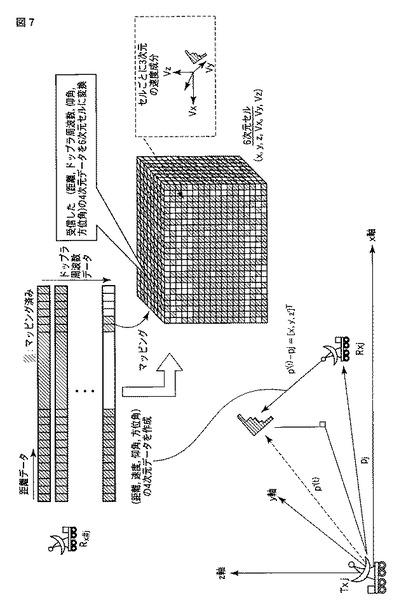
図7は、第1の実施形態に関わる信号処理部15における処理の模式図を示す。信号処理部15は、座標の原点及び直交軸を記録している。また、信号処理部15は、自装置の位置座標を把握している。信号処理部15は、式(27)に示したパルス信号m、レンジセルn、仰角θ及び方位角φの4次元の信号yi,j(m,n,θ,φ)を、目標の位置のx座標、y座標、z座標、目標の速度のx座標、y座標、z座標の値の6次元セルデータに変換する。
【0072】
以下に6次元セルデータへの変換手法について説明する。
【0073】
変換手法の概念は、「目標がもしこの位置及び速度で存在するのなら、その目標からの反射波はパルス信号m及びレンジセルnで受信される」という仮定が基になっている。
【0074】
まず、信号処理部15は、受信装置RX1〜RXRそれぞれの位置関係及び送信された送信信号の方向等から、目標が存在する可能性のある位置であるx座標、y座標、z座標を仮定する。ここで、仮定した目標の位置ベクトルの一つをp’(t)とする。目標の位置ベクトルp’(t)が仮定されると、参照すべきレンジセルの番号n’i,j、受信装置RX1〜RXRから見た仰角θ’j、方位角φ’jの値が決定される。このとき、レンジセルの番号n’i,jは送信装置TXiと目標との間の距離と、目標と受信装置RXjとの間の距離との和から見積もることができる。各距離の和は次式で表すことができる。
【数29】
【0075】
ただし、
【数30】
【0076】
よって、位置x,y,z座標の値が与えられた際に参照するレンジセルの番号n’i,jは次式で表すことができる。
【数31】
【0077】
また、仰角θ’j及び方位角φ’jは次式で表される。
【数32】
【0078】
【数33】
【0079】
ただし、
【数34】
【0080】
とおく。また、ΔθとΔφとは式(27)に示したデジタルビームを形成する際の仰角のサーチ間隔と、方位角のサーチ間隔とをそれぞれ表している。
【0081】
次に、信号処理部15は、仮定した位置において目標が取り得る速度を仮定する。ここでは、仮定した目標速度のx座標、y座標、z座標の値をそれぞれv’x,v’y,v’zとし、これらをベクトルv’(t)で表わす。
【数35】
【0082】
速度ベクトルv’(t)が仮定されると、式(14),(15)により、この速度ベクトルv’(t)に対して参照するパルス信号の値m’i,jが以下のように求められる。
【数36】
【0083】
信号処理部15は、式(27),(29)〜(36)を用い、次式により4次元の信号yi,j(m,n,θ,φ)を6次元セルデータFi,j(x,y,z,vx,vy,vz)へ変換する。
【数37】
【0084】
信号処理部15は、目標が存在する可能性のあるその他の位置、及び、目標が取り得るその他の速度についても仮定し、その仮定に基づいて、信号yi,j(m,n,θ,φ)を、6次元セルデータへ変換する。信号処理部15は、6次元セルデータをMISO積分部17へ出力する。
【0085】
MISO積分部17は、信号処理部15からの6次元セルデータに対してMISO(Multi Input Single Output)積分を行う。MISO積分とは、送信装置TX1〜TXRそれぞれからの送信信号に基づく目標反射波についての6次元セルデータを積分する処理である。このとき、目標反射波は、同一の目標で反射されたものである。MISO積分部17は、目標について仮定された全ての位置及び速度に基づく6次元セルデータについて、仮定された位置及び速度毎にMISO積分を行う。仮定された位置及び速度毎の計算はそれぞれ同様であるため、以下では、仮定された位置及び速度のうちいずれかに基づく6次元セルデータについてのMISO積分を説明する。
【0086】
送信装置TX1〜TXRは、送信ビームをそれぞれ異なる時刻に目標へ向けるため、送信装置TX1〜TXRからの送信信号に対する目標反射波は、異なる時刻に受信装置RX1〜RXRで受信されることとなる。また、送信装置TX1〜TXRが目標に対して送信ビームを向ける時刻が異なるため、その間に目標が移動してしまうこともある。そのため、同一の目標からの目標反射波に基づいて得られる6次元セルデータは、送信源毎に異なる。
【0087】
MISO積分部17は、送信ビームを向ける間に移動してしまった目標の移動量を推定するために、目標の運動モデルを規定する。
【0088】
例えば、目標の運動モデルを等速直線運動と仮定した場合、ある時刻における6次元セルデータFi,j(x,y,z,vx,vy,vz)は、時刻Δt秒後においては以下の式で計算される状態ベクトルFi,j(x’,y’,z’,v’x,v’y,v’z)となる。
【数38】
【0089】
【数39】
【0090】
MISO積分部17は、式(38),(39)で求められる位置ベクトル及び速度ベクトルの変化量に基づいて、移動前の6次元セルデータと移動後の6次元セルデータとを結び付ける。そして、MISO積分部17は、結び付けた6次元セルデータを積分する。これらの積分式は次式のように表わせる。
【数40】
【0091】
ここで、上式におけるF1,j(x,y,z,vx,vy,vz),…,FR,j(x’,y’,z’,v’x,v’y,v’z)は、送信装置TX1〜TXRそれぞれから送信される送信信号に基づく目標反射波についての6次元セルデータを示す。これらの目標反射波の受信時刻はそれぞれ異なるが、互いに結び付けられているため、積分されることとなる。MISO積分部17は、積分結果を処理サーバ20へ出力する。
【0092】
なお、式(40)における積分期間は、時間方向(数スキャン)に任意に延ばすことが可能であり、その場合は6次元セルデータの積分数が増加する。積分期間を短く(例えば1スキャン間)した場合、目標の急な運動変化への対応性が良好となる。また、積分期間を長くした場合、積分利得の向上が図れるが、目標の急な運動変化への対応性は劣化するものと考えられる。
【0093】
また、MISO積分部17は、等速直線運動モデルの他に、他の様々な運動モデルを規定する。そして、MISO積分部17は、式(39),(40)に従って6次元セルデータの変化を推定するのと並行して、その他の様々な運動モデルに基づいて6次元セルデータの変化を推定するようにしてもよい。MISO積分部17は、その他の様々な運動モデルに基づいて、移動前の6次元セルデータと、移動後の6次元セルデータとを結び付けるそして、MISO積分部17は、結び付けた6次元セルデータを積分する。実際の目標の運動と、想定した運動モデルとが一致する場合、その運動モデルに基づいて結び付けた6次元セルデータの積分結果が増大することとなる。
【0094】
図1における処理サーバ20は、積分処理部21及び目標検知部22を具備する。
【0095】
積分処理部21は、受信装置RX1〜RXRで取得されたMISO積分の結果を受信し、受信装置RX1〜RXR毎のMISO積分結果に対してSIMO(Single Input Multi Output)積分を行う。積分式は次式で示される。
【数41】
【0096】
積分処理部21は、SIMO積分の結果を目標検知部22へ出力する。
【0097】
目標検知部22は、積分期間中に想定されるMISO積分の積分結果の積分数にしたがい、式(42)で求められるスレッショルド値を設定する。MISO積分の積分結果の積分数に対するスレッショルド値の関係式を以下に示す。
【数42】
【0098】
ここで、Qは積分する積分結果の数、PFAは誤警報確率、PDは探知確率であり、F−1は自由度2R2におけるカイ二乗分布の片側確率の逆関数である。そして、目標検知部22は、積分処理部21からの積分結果のレベルが式(42)で算出されるスレッショルド値を超えた場合、目標を検知したとする。目標検知部22は、仮定した位置及び速度全てについての積分結果のレベルに対して、仮定した位置及び速度毎に、スレッショルド値を超えるか否かを判断する。これにより、仮定した位置及び速度の中から実際に目標が存在する位置及び目標が有する速度が決定されることとなる。
【0099】
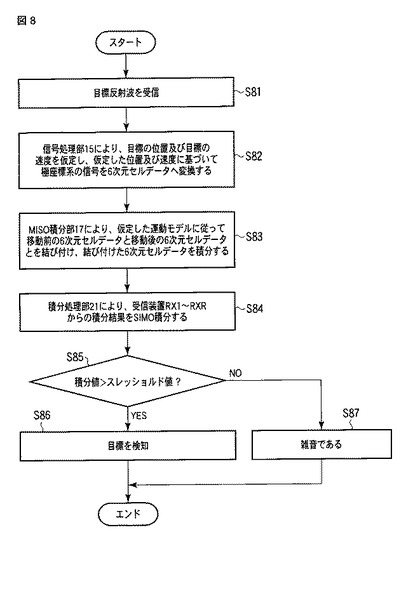
図8は、第1の実施形態に係るMIMOレーダシステムが目標を検知する際のフローチャートを示す。
【0100】
まず、受信装置RX1〜RXRは、送信装置TX1〜TXRからの送信信号に対する目標反射波を受信する(ステップS81)。受信装置RX1〜RXRは、信号処理部15により、目標の位置及び目標の速度を仮定し、仮定した位置及び速度に基づいて極座標系の信号を6次元セルデータへ変換する(ステップS82)。そして、受信装置RX1〜RXRは、MISO積分部17により、仮定した運動モデルに従って移動前の6次元セルデータと移動後の6次元セルデータとを結び付け、結び付けた6次元セルデータを積分する(ステップS83)
続いて、積分処理部21は、受信装置RX1〜RXRからの積分結果をSIMO積分する(ステップS84)。
【0101】
続いて、目標検知部22は、積分処理部21から積分結果を受け取り、この積分値が式(42)で算出されるスレッショルド値を超えるか否かを判断する(ステップS85)。目標検知部22は、積分値がスレッショルド値を超える場合(ステップS85のYes)、目標を検知したとして(ステップS86)、目標の検知処理を終了させる。積分値がスレッショルド値を超えない場合(ステップS85のNo)、雑音であるとして(ステップS87)、目標の検知処理を終了させる。
【0102】
以上のように、上記第1の実施形態では、送信装置TX1〜TXRからの送信信号に対する目標反射波は、受信装置RX1〜RXRの位置によりその成分(距離、方向、ドップラ周波数)が異なる。受信装置RX1〜RXRは、座標の原点及び直交軸を共有しており、極座標系で探索した信号を、デカルト座標系を用いた6次元セルデータに変換するようにしている。これにより、受信装置RX1〜RXRは、同一の目標からの目標反射波を共通の座標で扱うことが可能となる。つまり、受信装置RX1〜RXRは、それぞれが遠隔に配置されている場合であっても、目標の位置及び速度を共通の座標で表すことが可能であり、同一成分同士を積分することが可能である。これにより、積分処理部21は、受信装置RX1〜RXRにおける受信信号を合成して処理することが可能となる。
【0103】
また、上記第1の実施形態では、MISO積分部17により、目標の運動モデルを規定し、目標の移動量を推定する。MISO積分部17は、この移動量を参照し、目標の移動に伴って変化する6次元セルデータを推定する。そして、MISO積分部17は、移動前の6次元セルデータと移動後の6次元セルデータとを結び付け、結び付けた6次元セルデータを積分するようにしている。これにより、MISO積分部17は、送信装置TX1〜TXRからの送信信号に対する目標反射波の受信時刻がそれぞれ異なる場合であっても、その目標反射波についての6次元セルデータを積分することが可能となる。
【0104】
したがって、第1の実施形態に係るMIMOレーダシステムは、複数の受信装置が遠隔に配置されている場合であっても、各受信装置で受信された受信信号を同一成分同士で処理することができる。
【0105】
なお、第1の実施形態に係るMIMOレーダシステムでは、MISO積分を行った後にSIMO積分を行う場合を例に説明しているが、まずSIMO積分を行い、その後にMISO積分を行うようにしても構わない。
【0106】
(第2の実施形態)
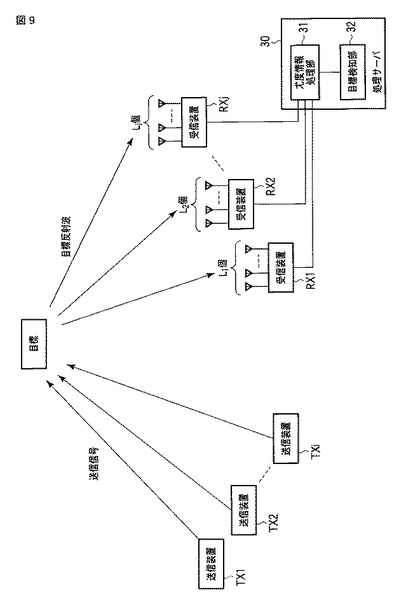
図9は、第2の実施形態に係わるMIMOレーダシステムの機能構成を示すブロック図である。図9に示すMIMOレーダシステムは、送信装置TX1〜TXR、受信装置RX1〜RXR及び処理サーバ30を具備する。
【0107】
図10は、第2の実施形態に係る受信装置RX1〜RXRの機能構成を示すブロック図である。図11に示す受信装置RX1〜RXRは、無線部11、極座標信号生成部16、信号処理部15及び尤度情報算出部18を備える。
【0108】
尤度情報算出部18は、信号処理部15からの6次元セルデータに基づいて尤度情報を算出する。尤度情報は、6次元セルデータの強度に基づいて、6次元セルデータが雑音である確率を示すものである。尤度情報は、6次元セルデータの振幅をAとすると、以下の式により算出される。
【数43】
【0109】
ここで、σNは、無線部11の雑音電圧である。尤度情報算出部18は、目標について仮定された全ての位置及び速度に基づく6次元セルデータについて尤度情報の算出を行う。尤度情報算出部18は、算出した尤度情報のうち、送信装置TX1〜TXRそれぞれからの送信信号に基づいて算出された尤度情報を掛け合わせる。このとき、送信装置TX1〜TXRは、送信ビームをそれぞれ異なる時刻に目標へ向けるため、送信装置TX1〜TXRからの送信信号に対する目標反射波は、異なる時刻に受信装置RX1〜RXRで受信される。そこで、尤度情報算出部18は、送信ビームを向ける間に移動してしまった目標の移動量を推定するために、目標の運動モデルを規定する。尤度情報算出部18は、規定した運動モデルに基づいて、6次元セルデータの変化を推定する。尤度情報算出部18は、6次元セルデータの変化量に基づいて、移動前の6次元セルデータと移動後の6次元セルデータとを互いに結び付ける。そして、尤度情報算出部18は、互いに結び付けられた6次元セルデータを用いて算出された尤度情報を、以下の式に示すように掛け合わせる。これにより、尤度情報算出部18は、送信装置TX1〜TXRそれぞれからの送信信号に基づく目標反射波についての尤度情報を算出する。
【数44】
【0110】
尤度情報算出部18は、掛け合わせた尤度情報を処理サーバ30へ出力する。
【0111】
処理サーバ30は、尤度情報処理部31及び目標検知部32を具備する。
【0112】
尤度情報処理部31は、受信装置RX1〜RXRからの尤度情報を次式に示すように、それぞれ掛け合わせる。
【数45】
【0113】
尤度情報処理部31は、式(45)によって算出された結合確率を目標検知部32へ出力する。
【0114】
目標検知部32は、尤度情報処理部31で算出された結合確率が、MIMOレーダシステムにおける誤警報確率として設定された値PN以下となるか否かを判定する。目標検知部32は、結合確率が誤警報確率PN以下となる場合、目標が存在すると判断する。目標検知部32は、仮定した位置及び速度全てについての結合確率に対して、仮定した位置及び速度毎に、誤警報確率PN以下となるか否かを判断する。これにより、仮定した位置及び速度の中から実際に目標が存在する位置及び目標が有する速度が決定されることとなる。
【0115】
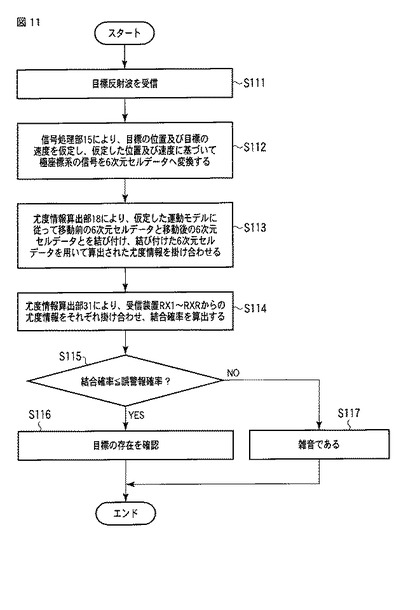
図11は、第2の実施形態に係るMIMOレーダシステムが、目標を検知する際のフローチャートを示す。
【0116】
まず、受信装置RX1〜RXRは、送信装置TX1〜TXRからの送信信号に対する目標反射波を受信する(ステップS111)。受信装置RX1〜RXRは、信号処理部15により、目標の位置及び目標の速度を仮定し、仮定した位置及び速度に基づいて曲座標系の信号を6次元セルデータへ変換する(ステップS112)。そして、受信装置RX1〜RXRは、尤度情報算出部18により、仮定した運動モデルに従って移動前の6次元セルデータと移動後の6次元セルデータとを結び付け、結び付けた6次元セルデータを用いて算出された尤度情報を掛け合わせる(ステップS113)
続いて、尤度情報処理部31は、受信装置RX1〜RXRからの尤度情報をそれぞれ掛け合わせ、結合確率を算出する(ステップS114)。
【0117】
続いて、目標検知部32は、尤度情報処理部31から結合確率を受け取り、この結合確率が誤警報確率PN以下となるか否かを判断する(ステップS115)。目標検知部32は、結合確率が誤警報確率PN以下となると判断する場合(ステップS115のYes)、目標が存在しているとして(ステップS116)、目標の検知処理を終了させる。目標検知部32は、結合確率が誤警報確率PNを超える場合(ステップS115のNo)、雑音であるとして(ステップS117)、目標の検知処理を終了させる。
【0118】
以上のように、上記第2の実施形態では、尤度情報算出部18により、目標の運動モデルを規定し、目標の移動量を推定する。尤度情報算出部18は、この移動量を参照し、目標の移動に伴って変化する6次元セルデータを推定する。そして、尤度情報算出部18は、移動前の6次元セルデータと移動後の6次元セルデータとを結び付け、無図日付けた6次元セルデータを用いて算出される尤度情報を掛け合わせるようにしている。これにより、尤度情報算出部18は、送信装置TX1〜TXRからの送信信号に対する目標反射波の受信時刻がそれぞれ異なる場合であっても、その目標反射波についての尤度情報を掛け合わせることが可能となる。
【0119】
したがって、第2の実施形態に係るMIMOレーダシステムは、複数の受信装置が遠隔に配置されている場合であっても、各受信装置で受信された受信信号を同一の成分同士で処理することができる。
【0120】
(その他の実施形態)
上記各実施形態では、受信装置RX1〜RXRの極座標信号生成部16が、無線部11からの受信信号をパルス圧縮部12、ドップラフィルタ処理部13及び空間処理部14の順で処理をする例を説明した。しかしながら、これに限定される訳ではない。例えば、極座標信号生成部16が、図12に示すように、無線部11からの受信信号を、空間処理部、パルス圧縮部及びドップラフィルタ処理部の順で処理しても構わない。
【0121】
すなわち、空間処理部は、デジタルビームフォーミングを適用し、無線部11からの受信信号のうち、所望の方向からの信号を抽出する。パルス圧縮部は、空間処理部からの信号に対してパルス圧縮処理を施し、パルス信号毎のレンジデータを生成する。ドップラフィルタ処理部は、M個のパルス信号毎のレンジデータに対してFFT(Fast Fourier Transform)処理を施すことで、極座標系の信号yi,j(m,n,θ,φ)を生成する。
【0122】
また、上記各実施形態では、捜索する全てのレンジセル、パルス信号、方位角及び仰角に対して計算することで、目標を捜索するようにしている。一方、送信ビームのサイドローブレベルが十分に小さく、ビームを向けている方角に目標が存在しない場合は、受信装置RX1〜RXRには目標反射波は到来しない。そのため、このような場合、受信装置RX1〜RXRは、送信装置TX1〜TXRの位置及びCPI毎にビームを向ける仰角及び方位角に基づいて、ビームを向けている方向に含まれるデカルト座標以外のレンジセル、方位角及び仰角については計算を省略してもよい。
【0123】
例えば、パルス圧縮部12は、送信装置TX1〜TXRのビームの方角及びビーム幅からメインビームに含まれるデカルト座標を求め、当該デカルト座標におけるレンジの最小値と最大値の間のレンジセルに対してのみ式(22)の計算を行う。そして、ドップラフィルタ処理部13は、得られたレンジデータに対してのみ式(23)のパルス信号の計算を実施し、空間処理部14は、得られたデータに対して式(27)の空間処理(受信DBF処理)を実施する。
【0124】
また、例えば、空間処理部は、送信装置TX1〜TXRのビームの方角及びビーム幅からメインビームに含まれるデカルト座標を求め、当該デカルト座標におけるレンジの最小値と最大値との間の所望の方向からの信号を抽出する。パルス圧縮部は、空間処理部からの信号に対してパルス圧縮処理を行う。ドップラフィルタ処理部は、得られたレンジデータに対してパルス信号の計算を実施する。
【0125】
ただし、前述した通り送信装置TX1〜TXR毎に位置及びビームを向ける方角が異なるため、対象とする送信装置TX1〜TXR毎に異なる領域の計算を行う必要がある。なお、ビームを向ける方位角及び仰角はCPI毎に異なるため、計算するレンジセル、方位角及び仰角もCPI毎に異なる。
【0126】
また、上記各実施形態では、目標の種類とは関係なく、目標の捜索を行うようにしている。しかしながら、目標の種類によっては、高度毎に移動速度が制限されるものもある。よって、受信装置RX1〜RXRの信号処理部15は、式(37)の変換を行う際に、高度zの値毎に
【数46】
【0127】
の値を制限し、その範囲内でvx,vy,vzの値を決定することで、演算量を削減するようにしても良い。
【0128】
また、信号処理部15は、高度zに応じた確率密度関数で速度が定義できる場合は、確率密度が閾値を超える領域のみで上述の処理を行ってもよいし、計算されたFi,j(x,y,z,vx,vy,vz)の値を確率密度の値に応じて高い重みが乗算されるように加重合成してもよい。
【0129】
また、上記各実施形態では、信号処理部15は、必ずしも全レーダ領域に対して6次元セルへの変換を行う必要はなく、例えば、一般的なモノスタティックレーダ動作で目標を探知できるような近距離に対しては、変換領域から除外してもよい。
【0130】
また、上記各実施形態では、送信装置TX1〜TXRと受信装置RX1〜RXRとが別々の装置である場合を例に説明した。しかし、これに限定される訳ではない。例えば、送信装置TX1と受信装置RX1とが1台のレーダ装置に搭載されている場合であっても構わない。この場合、上述の式において、i=jであれば同一のレーダ装置による送信及び受信を表わしており、i≠jであれば、送信源と受信点が異なるレーダ装置による送信及び受信を表わす。
【0131】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0132】
11…無線部
12…パルス圧縮部
13…ドップラフィルタ部
14…空間処理部
15…信号処理部
16…極座標信号生成部
17…MISO積分部
18…尤度情報算出部
20,30…処理サーバ
21…積分処理部
22,32…目標検知部
31…尤度情報処理部
TX1〜TXj…送信装置
RX1〜RXi…受信装置
【技術分野】
【0001】
本発明の実施形態は、MIMO(Multiple-Input Multiple-Output)方式を用いたMIMOレーダシステムと、このシステムで用いられる送信装置、受信装置及びMIMOレーダ信号処理方法とに関する。
【背景技術】
【0002】
複数のレーダ装置で電波を送信し、複数のレーダ装置で電波を受信することで、ダイバーシティ利得を向上させる方式としてMIMOレーダシステムと呼ばれるレーダシステムが提案されている。MIMOレーダシステムにおけるレーダ装置は、電波を所定の方式により変調した後に空間へ送信することで、送信する電波が他のレーダ装置からの電波と互いに無相関となるようにしている。これにより、レーダ装置は、受信時に各レーダ装置からの信号を分離することが可能になる。
【0003】
ところで、レーダ装置は、目標で反射・散乱・回折した電波に基づいて、目標までの距離及び方向を推定する。また、レーダ装置は、受信波のドップラ周波数に基づいて、目標の相対速度を推定する。ここで、複数のレーダ装置が遠隔に配置されている場合、目標までの距離及び方向と、目標の相対速度とはレーダ装置毎に異なることとなる。
【0004】
このため、複数のレーダ装置により目標を探知する場合、各レーダ装置での受信信号を、距離、方向及び相対速度のそれぞれの成分毎に足し合わせて処理することは不可能である。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】E. Fisher, A. H. Heimovich, "Spatial diversity in radar - models and detection Performance", IEEE Trans. On Signal Processing, vol. 54, no. 3, pp. 823-838
【非特許文献2】E. Fisher, A. H. Heimovich, "Performance of MIMO Radar System: Advantages of Angular Diversity", IEEE Trans. On Signal Processing, 2004
【発明の概要】
【発明が解決しようとする課題】
【0006】
以上のように、従来のMIMOレーダシステムでは、複数のレーダ装置が遠隔に配置されている場合、各レーダ装置で受信された受信信号を、距離、方向及び相対速度のそれぞれの成分毎に積分することはできないという問題がある。
【0007】
そこで目的は、複数のレーダ装置が遠隔に配置されている場合であっても、各レーダ装置で受信された受信信号を同一の成分同士で処理可能なMIMOレーダシステムと、このシステムで用いられる送信装置、受信装置及びMIMOレーダ信号処理方法とを提供することにある。
【課題を解決するための手段】
【0008】
実施形態によれば、MIMOレーダシステムは、複数の送信装置と、複数の受信装置と、処理サーバとを具備する。送信装置は、互いに無相関となるように変調された送信信号を空間へ向けて送信する。受信装置は、原点及び直交軸をそれぞれが共有し、前記空間へ向けて送信された複数の送信信号が前記空間中の目標で反射・散乱・回折された複数の目標反射波を受信する。受信装置は、極座標信号生成部と、信号処理部と、6次元セルデータ処理部とを備える。極座標信号生成部は、前記受信した複数の目標反射波それぞれに基づいて、前記目標の位置を極座標系で表した複数の極座標信号を生成する。信号処理部は、前記複数の極座標信号それぞれを、前記原点及び直交軸を利用したデカルト座標系により表した複数の6次元セルデータに変換する。6次元セルデータ処理部は、前記複数の6次元セルデータを統合することで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得する。処理サーバは、前記複数の受信装置それぞれからの受信結果に基づいて前記目標を検知する。
【図面の簡単な説明】
【0009】
【図1】第1の実施形態に係るMIMOレーダシステムの機能構成を示すブロック図である。
【図2】図1の送信装置から送信される送信信号を示す図である。
【図3】図1の受信装置の機能構成を示すブロック図である。
【図4】図3のパルス圧縮部での処理を示す図である。
【図5】図3のドップラフィルタ処理部での処理を示す図である。
【図6】図3の空間処理部での処理を示す図である。
【図7】図3の信号処理部での処理を示す図である。
【図8】図1のMIMOレーダシステムが目標を検知する際のフローチャートを示す図である。
【図9】第2の実施形態に係わるMIMOレーダシステムの機能構成を示すブロック図である。
【図10】図9の受信装置の機能構成を示すブロック図である。
【図11】図9のMIMOレーダシステムが目標を検知する際のフローチャートを示す図である。
【図12】図3の極座標信号生成部の構成のその他の例を示す図である。
【発明を実施するための形態】
【0010】
以下、実施の形態について、図面を参照して説明する。
【0011】
(第1の実施形態)
図1は、第1の実施形態に係るMIMOレーダシステムの機能構成を示すブロック図である。図1に示すMIMOレーダシステムは、送信装置TX1〜TXR、受信装置RX1〜RXR及び処理サーバ20を具備する。
【0012】
はじめに、図1に示す送信装置TX1〜TXRによる電波の送信形態、及び、受信装置RX1〜RXRによる電波の受信形態について定義する。なお、以下では、送信信号が目標で反射・散乱・回折された電波を目標反射波と称する。
【0013】
バイスタティックレーダでは、送信源と受信点とが隔離して配置されるので、送信ビームと受信ビームとが会合する領域からの目標反射波しか受信することができない。このため、モノスタティックレーダ動作に比較してレーダ領域を捜索するのに要する時間は多大なものとなる。このような欠点を解決するため、受信動作は多数のビームを形成するマルチビーム方式を採用することが考えられる。このように受信ビームを増やせば、1回の送信ビームに対して広範囲な領域から反射波を同時に受信することができるようになるため、捜索時間を短縮することができる。
【0014】
一方、MIMOレーダシステムも同様に、複数の送信ビームと受信ビームが空間で会合する領域からは目標反射波を受信することができる。ただし、上述したとおり、このような方式で捜索するのに要する時間は多大なものとなる。そこで、捜索効率の観点から、本実施形態に係る受信装置RX1〜RXRの受信動作は多数のビームを形成するマルチビーム方式を採用する。また、本実施形態に係る送信装置TX1〜TXRの送信動作は特別なビーム走査を行うものとはせず、送信装置TX1〜TXR及び受信装置RX1〜RXRは、所定のビーム走査プログラムに従った方向に対して連続的にビーム走査する方式を採用する。
【0015】
まず、送信装置TX1〜TXRが送信する送信信号について説明する。
【0016】
送信装置TX1〜TXRの位置ベクトルpiは、3次元のデカルト座標系を用いて以下のように表される。
【数1】
【0017】
ただし、xi,yi,zi(i=1〜R)は、送信装置TXiのx座標、y座標、z座標の位置をそれぞれ表し、Tはベクトルの転置を表す。
【0018】
送信装置TX1〜TXRは、通常のレーダシステムと同様に、複数回同一のパルス信号を送信する。送信装置TX1〜TXRの送信器は、デジタル−アナログ変換器、周波数変換器、フィルタ、増幅器及びアンテナ等を備える一般的な送信器である。各送信装置TX1〜TXRは、お互いに無相関となるように周波数変調又は符号化変調されたパルス信号を送信する。
【0019】
本実施形態では、送信信号をsi[n]とおく。ただし、si[n]は、i番目の送信装置が送信するパルス信号が帯域幅W[Hz]で離散化された信号とする。また、1周期におけるパルス信号の送信時間をT[sec]とし、T[sec]の間のサンプル数をNTとおく。また、パルス信号の繰り返し周波数をfPRF[Hz]、繰り返し周期をTPRI[sec](TPRI=1/fPRF)とおき、繰り返し周期TPRI[sec]の間のサンプル数をNPRIとおく。ここで、送信パルス数をMとおくと、m番目のパルス信号におけるn番目のレンジセルに相当する送信信号は以下のように表される。
【数2】
【0020】
図2は、第1の実施形態に係る送信装置TX1〜TXRから送信される送信信号の模式図を示す。
【0021】
送信装置TX1〜TXRは、上記送信信号をキャリア周波数fC、送信電力P(t)、送信アンテナ利得G(t)で送信するものとする。
【0022】
送信装置TX1〜TXRがパルス信号を繰り返し送信する時間間隔は、目標のレンジセルの移動と、目標の水平面方位角及び仰角の変化とを無視できる時間内に設計される。この時間間隔は、CPI(Coherent Processing Interval)(CPI=MTPRI[sec])と呼ばれる。送信装置TX1〜TXRは、CPI内では一定の方位角、仰角方向にビームを向けてパルス信号を送信するものとする。
【0023】
このように、送信装置TX1〜TXRは、CPI毎に異なる方位角及び仰角(またはいずれか一方の角度)にビームを走査してパルス信号を送信する。この結果、目標の方位角・仰角とビームを向けた方向とが一致した場合、目標に対して強いビームが照射されることになる。
【0024】
次に、受信装置RX1〜RXRで受信される受信信号について説明する。受信装置RX1〜RXRは、目標反射波を受信する。受信信号は、以下のように求められる。なお、受信装置RX1〜RXRの添え字は、j(j=1〜R)を用いて記述する。
【0025】
前述の通り、送信装置TX1〜TXRは、異なる位置に配置され、CPI毎に異なる方角にビームを向けて送信信号を送信している。そのため、送信装置TX1〜TXRが送信した全ての送信信号が同時に目標に照射されるとは限らない。また、送信装置TX1〜TXRが送信する送信信号は、互いに無相関であるため、受信装置RX1〜RXRは復調器により受信信号を送信源別に抽出することができる。
【0026】
ここで、目標の位置及び速度について以下に定義する。目標の位置及び速度は前述の通りそれぞれ3次元のデカルト座標系を用いて定義する。レンジセルnにおける目標の位置は以下のベクトルp(t)[n]を用いて表す。
【数3】
【0027】
ただし、x(t)[n],y(t)[n],z(t)[n]はレンジセルnにおける目標のx座標、y座標、z座標の位置を表す。
【0028】
同様に、レンジセルnにおける目標の速度は、3次元デカルト座標のベクトルv(t)[n]を用いて以下のように表される。
【数4】
【0029】
ただし、vx[n],vy[n],vz[n]はレンジセルnにおける目標のx座標の速度、y座標の速度、z座標の速度をそれぞれ表す。
【0030】
前述の通り、受信装置RX1〜RXRを遠隔に配置する場合、目標の方位角、仰角及び相対速度は受信装置RX1〜RXR毎に異なる。一方、式(3)及び(4)のようにデカルト座標を用いて目標の位置及び速度を定義すると、座標の原点及び直交基底ベクトルを受信装置RX1〜RXRが共有していれば、受信装置RX1〜RXRにおける目標の位置及び速度ベクトルが同一の値となる。
【0031】
次にRCS(Radar Cross Section)について考える。ステルス機のようにRCSの角度依存性が高い目標の場合、RCSは電波の入射方向と反射方向に依存し、受信装置RX1〜RXR毎に異なる値となる。また、目標の姿勢や向きに依存して入射角度は異なるため、RCSは次式のように表される。
【数5】
【0032】
ただし、θi(t)[n],φi(t)[n],θj(t)[n],φj(t)[n]は目標自身の方向及び姿勢を表しており、3次元座標におけるレンジセルnにおける送信装置TXiに対する電波の入射方向の仰角と方位角と、受信装置RXjに対する目標反射波の反射方向の仰角と方位角とをそれぞれ表す。なお、RCSが隣接する角度間で無相関だと仮定できる場合、式(5)のRCSの表記は、レンジセルnにおいて送信装置TXiからの送信信号に対する目標反射波を受信装置RXjで受信するとして以下のように簡略化することができる。
【数6】
【0033】
次に、受信装置RX1〜RXRの位置ベクトルpjも目標と同様に3次元のデカルト座標系を用いて以下のように表される。
【数7】
【0034】
ただし、xj,yj,zjは、受信装置RXjのx座標、y座標、z座標の位置をそれぞれ表している。また、受信装置RXjのアンテナ素子数をLjとし、各アンテナの位置を以下の3次元ベクトルで表す。
【数8】
【0035】
ここで、xj,l,yj,l,zj,lは,受信装置RXjのl番目のアンテナ素子のx座標、y座標、z座標の位置をそれぞれ表している。
【0036】
次に、受信装置RXjで受信される受信信号の伝搬遅延時間τjを求める。送信装置TXiと目標との距離は、式(1)を用いて次式で表される。
【数9】
【0037】
ただし、‖・‖は次式を満たすベクトルノルムである。目標の速度は次式で表わす。
【数10】
【0038】
ただし、
【数11】
【0039】
同様に、目標と受信装置RXjとの距離は次式で表すことができる。
【数12】
【0040】
よって、伝搬遅延時間τjは次式で表すことができる。
【数13】
【0041】
ただし、cは光速[m/sec]を表す。
【0042】
次に、受信信号が受けるドップラ周波数を示す。
【0043】
まずは、送信装置TXiから目標に到達する送信信号が受けるドップラ周波数について考える。目標の送信装置TXiに対する相対速度は、送信装置TXiと目標とを結ぶ単位ベクトルと式(4)に示した目標の速度ベクトルの内積に等しい。よって、目標に入射する送信信号が受けるドップラ周波数は次式で表される。
【数14】
【0044】
ここで、λは送信信号の波長を表している。
【0045】
同様に、受信装置RXjで受信される目標反射波が受けるドップラ周波数は次式で表すことができる。
【数15】
【0046】
最後に、受信装置RXjのアンテナ間で生じる受信信号の位相差について示す。目標と受信装置RXjのl番目のアンテナ間の経路長は以下の式で表すことができる。
【数16】
【0047】
よって、l番目の素子で生じる位相差は以下の式で表すことができる。
【数17】
【0048】
以上、式(1)〜式(17)で示した送信信号si[n]、伝搬遅延時間τj、目標の移動によるドップラ周波数fDi[n],fDj[n]、各アンテナで受信する信号の位相差を加味すると、送信装置TXiのl番目のアンテナで受信されるレンジセルnの受信信号は次式で表すことができる。
【数18】
【0049】
ただし、τ0は信号を送信してから受信処理を開始するまでのオフセットであり、zj,l[n]は受信装置RXjのl番目のアンテナで受信した受信信号に含まれるレンジセルnの熱雑音を表す。
【0050】
図3は、第1の実施形態に係る受信装置RX1〜RXRの機能構成を示すブロック図である。図3に示す受信装置RX1〜RXRは、無線部11、極座標信号生成部16、信号処理部15及びMISO(Multiple-Input Single-Output)積分部17を備える。
【0051】
無線部11は、アンテナ、周波数変換器及びアナログ−デジタル変換器等を備える。無線部11は、目標からの目標反射波を受信し、この信号をベースバンド帯のデジタル形式の信号に変換する。無線部11は、変換後の受信信号を極座標信号生成部16へ出力する。
【0052】
極座標信号生成部16は、パルス圧縮部12、ドップラフィルタ処理部13及び空間処理部14を備える。
【0053】
図4は、第1の実施形態に係るパルス圧縮部12での処理を示す模式図である。パルス圧縮部12は、無線部11からの受信信号をレンジデータに変換する。レンジデータとは、各レンジセルでの受信信号を、異なる伝搬遅延時間の信号となるように変換したものである。レンジデータは、伝搬路の熱雑音が無視できる場合、伝搬路のインパルス応答と等しくなる。式(2)に示した送信信号がインパルス性の強い孤立パルスの場合、受信信号がそのままレンジデータとなるため、特別な処理は必要ない。しかし、孤立パルスを送信信号として用いる場合、送信電力を高めるためにはピーク電力を高める必要があり、送信装置TX1〜TXR及び受信装置RX1〜RXRに広いダイナミックレンジを要求し、装置コストが増加する課題がある。そこで、本実施形態では、送信装置TX1〜TXRは、自己相関関数がインパルス信号に近い変調信号を送信信号として送信し、受信装置RX1〜RXRは、受信信号に対してパルス圧縮処理(相関処理)をするようにしている。この結果、パルス圧縮後の信号はインパルス信号を送信した場合と等価の信号が得られる。パルス圧縮部12は、この信号をレンジデータとする。一般に送信信号としてはチャープ信号やM系列等のPN符号が用いられる。
【0054】
以下に、式(2)の送信信号として変調信号が用いられた場合のパルス圧縮処理について示す。
【0055】
前述した通り、本実施形態では送信信号として周期TPRIでM回同一のパルス信号を送信することを想定しており、パルス圧縮処理は周期毎に適用する。ここではm番目の受信信号に対する処理について示す。まずは、m番目のパルス信号に対して得られる受信信号にFFTを適用し、周波数領域の信号に変換する。NfをFFTポイント数とすると、周波数領域における受信信号は次式で表される。
【数19】
【0056】
ここで、k=0〜Nf−1であり、FFTポイント数は受信信号の出力時系列ポイント数よりも大きいものとする。また、受信信号の系列はFFTポイント数Nfに合わせてその系列に0を付加する。なお、この処理は、一般的な零埋め処理である。
【0057】
ここで、送信されたパルス信号の伝搬は、伝搬路の遅延プロファイルをインパルス応答とした線形回路と等価とみなせる。そのため、受信信号は、送信信号と遅延プロファイルの畳込み処理によって得られるとみなすことができる。よって、受信信号は、周波数領域では送信信号の周波数応答と伝搬路の周波数伝達関数との積となる。よって、受信信号をFFTすることによって得られた周波数領域の信号に、送信信号の周波数伝達関数を除算することにより、伝搬路の周波数伝達関数を得ることができる。
【数20】
【0058】
なおSi[k]は、送信信号の周波数伝達関数であり、次式で表される。
【数21】
【0059】
この結果、式(20)の信号をIFFTすることによりレンジデータを得ることができる。
【数22】
【0060】
ただし、n=0〜Nf−1であり、ri,j,l[m,n]は、受信装置RXjのl番目のアンテナで受信した受信信号のうち、m番目のパルス信号から得られたn番目のレンジセルのレンジデータを表している。同様の処理を各送信装置TX1〜TXRが送信するパルス信号毎に適用し、m番目以外のパルス信号に対しても適用することにより、NRM個のパルス信号からレンジデータを得ることができる。
【0061】
なお、レンジセルデータは、送信装置TXiのビームが目標に向けられ、送信信号が目標に照射されたCPIでのみ信号成分を含み、そうでないCPIに対してはサイドローブレベルが十分に低いとみなせる場合、雑音成分のみが含まれる。生成されたレンジデータは、ドップラフィルタ処理部13へ出力される。
【0062】
図5は、第1の実施形態に係るドップラフィルタ処理部13における処理を模式的に示した図である。ドップラフィルタ処理部13は、k番目のレンジセルのデータを取得する場合、M個のパルス信号から得られるk番目のレンジデータにFFTを適用する。
【数23】
【0063】
ただし、m=0〜M−1である。上記処理を全てのレンジセル(n=1〜N)に対して適用し、この結果得られるRi,j,l[m,n]は、受信装置RXjのl番目のアンテナで得られるm番目のパルス信号のn番目のレンジセルのデータを表す。この信号の電力が閾値電力よりも大きい場合、受信装置RXjのl番目のアンテナには送信装置TXiから送信されたパルス信号m、レンジセルnのドップラ周波数の信号が到来していると検知される。今、信号のサンプリングレートをW[Hz]としており、オフセットとしてτ0サンプルを加えているため、レンジセルnのパルス信号は距離c・(n+τ0)/Wメートルに相当する。また、パルス信号の繰り返し周波数がfPRIなので、受信信号はmfPRI/M[Hz]のドップラ周波数を受けていることになる。ドップラフィルタ処理部13は、取得したレンジセルのデータを空間処理部14へ出力する。
【0064】
図6は、第1の実施形態に係る空間処理部14における処理を模式的に示した図である。空間処理部14は、受信装置RX1〜RXRが複数のアンテナを用いてデジタル信号を得ている場合は、デジタルビームフォーミングを適用する。これにより、空間処理部14は、ビームを向けた方位角及び仰角から入射する目標反射波を抽出することが可能である。
【0065】
ここで、受信装置RXjにおいて水平面方位角φ、仰角θにビームを形成するためのウエイトベクトルwj(θ,φ)を次式で定義する。
【数24】
【0066】
このように、各アンテナで受信した目標反射波が同相で合成されるようにウエイトを形成することによって、所望方向にビームを形成することができる。ウエイトは受信装置RX1〜RXR毎にアンテナの配置が異なれば、同一の方角にビームを形成する場合でも異なるウエイトとなる。また、同一のアレーアンテナを用いても装置の向きが異なればウエイトは異なる。受信装置RXjにおけるウエイトは式(8)に示した受信装置RXjのアンテナ配置を表すベクトルを用いて次式で表される。
【数25】
【0067】
ただし、
【数26】
【0068】
空間処理部14は、以上のウエイトを、ドップラフィルタ処理部13からのレンジセルのデータにパルス信号毎に乗算することで、目標反射波のうち、レンジセルn、パルス信号mの仰角θ、方位角φの信号yi,j(m,n,θ,φ)を抽出することができる。
【数27】
【0069】
ただし、
【数28】
【0070】
また、Hは複素共役転置を表す。空間処理部14は、抽出した極座標系の信号yi,j(m,n,θ,φ)を、信号処理部15へ出力する。
【0071】
図7は、第1の実施形態に関わる信号処理部15における処理の模式図を示す。信号処理部15は、座標の原点及び直交軸を記録している。また、信号処理部15は、自装置の位置座標を把握している。信号処理部15は、式(27)に示したパルス信号m、レンジセルn、仰角θ及び方位角φの4次元の信号yi,j(m,n,θ,φ)を、目標の位置のx座標、y座標、z座標、目標の速度のx座標、y座標、z座標の値の6次元セルデータに変換する。
【0072】
以下に6次元セルデータへの変換手法について説明する。
【0073】
変換手法の概念は、「目標がもしこの位置及び速度で存在するのなら、その目標からの反射波はパルス信号m及びレンジセルnで受信される」という仮定が基になっている。
【0074】
まず、信号処理部15は、受信装置RX1〜RXRそれぞれの位置関係及び送信された送信信号の方向等から、目標が存在する可能性のある位置であるx座標、y座標、z座標を仮定する。ここで、仮定した目標の位置ベクトルの一つをp’(t)とする。目標の位置ベクトルp’(t)が仮定されると、参照すべきレンジセルの番号n’i,j、受信装置RX1〜RXRから見た仰角θ’j、方位角φ’jの値が決定される。このとき、レンジセルの番号n’i,jは送信装置TXiと目標との間の距離と、目標と受信装置RXjとの間の距離との和から見積もることができる。各距離の和は次式で表すことができる。
【数29】
【0075】
ただし、
【数30】
【0076】
よって、位置x,y,z座標の値が与えられた際に参照するレンジセルの番号n’i,jは次式で表すことができる。
【数31】
【0077】
また、仰角θ’j及び方位角φ’jは次式で表される。
【数32】
【0078】
【数33】
【0079】
ただし、
【数34】
【0080】
とおく。また、ΔθとΔφとは式(27)に示したデジタルビームを形成する際の仰角のサーチ間隔と、方位角のサーチ間隔とをそれぞれ表している。
【0081】
次に、信号処理部15は、仮定した位置において目標が取り得る速度を仮定する。ここでは、仮定した目標速度のx座標、y座標、z座標の値をそれぞれv’x,v’y,v’zとし、これらをベクトルv’(t)で表わす。
【数35】
【0082】
速度ベクトルv’(t)が仮定されると、式(14),(15)により、この速度ベクトルv’(t)に対して参照するパルス信号の値m’i,jが以下のように求められる。
【数36】
【0083】
信号処理部15は、式(27),(29)〜(36)を用い、次式により4次元の信号yi,j(m,n,θ,φ)を6次元セルデータFi,j(x,y,z,vx,vy,vz)へ変換する。
【数37】
【0084】
信号処理部15は、目標が存在する可能性のあるその他の位置、及び、目標が取り得るその他の速度についても仮定し、その仮定に基づいて、信号yi,j(m,n,θ,φ)を、6次元セルデータへ変換する。信号処理部15は、6次元セルデータをMISO積分部17へ出力する。
【0085】
MISO積分部17は、信号処理部15からの6次元セルデータに対してMISO(Multi Input Single Output)積分を行う。MISO積分とは、送信装置TX1〜TXRそれぞれからの送信信号に基づく目標反射波についての6次元セルデータを積分する処理である。このとき、目標反射波は、同一の目標で反射されたものである。MISO積分部17は、目標について仮定された全ての位置及び速度に基づく6次元セルデータについて、仮定された位置及び速度毎にMISO積分を行う。仮定された位置及び速度毎の計算はそれぞれ同様であるため、以下では、仮定された位置及び速度のうちいずれかに基づく6次元セルデータについてのMISO積分を説明する。
【0086】
送信装置TX1〜TXRは、送信ビームをそれぞれ異なる時刻に目標へ向けるため、送信装置TX1〜TXRからの送信信号に対する目標反射波は、異なる時刻に受信装置RX1〜RXRで受信されることとなる。また、送信装置TX1〜TXRが目標に対して送信ビームを向ける時刻が異なるため、その間に目標が移動してしまうこともある。そのため、同一の目標からの目標反射波に基づいて得られる6次元セルデータは、送信源毎に異なる。
【0087】
MISO積分部17は、送信ビームを向ける間に移動してしまった目標の移動量を推定するために、目標の運動モデルを規定する。
【0088】
例えば、目標の運動モデルを等速直線運動と仮定した場合、ある時刻における6次元セルデータFi,j(x,y,z,vx,vy,vz)は、時刻Δt秒後においては以下の式で計算される状態ベクトルFi,j(x’,y’,z’,v’x,v’y,v’z)となる。
【数38】
【0089】
【数39】
【0090】
MISO積分部17は、式(38),(39)で求められる位置ベクトル及び速度ベクトルの変化量に基づいて、移動前の6次元セルデータと移動後の6次元セルデータとを結び付ける。そして、MISO積分部17は、結び付けた6次元セルデータを積分する。これらの積分式は次式のように表わせる。
【数40】
【0091】
ここで、上式におけるF1,j(x,y,z,vx,vy,vz),…,FR,j(x’,y’,z’,v’x,v’y,v’z)は、送信装置TX1〜TXRそれぞれから送信される送信信号に基づく目標反射波についての6次元セルデータを示す。これらの目標反射波の受信時刻はそれぞれ異なるが、互いに結び付けられているため、積分されることとなる。MISO積分部17は、積分結果を処理サーバ20へ出力する。
【0092】
なお、式(40)における積分期間は、時間方向(数スキャン)に任意に延ばすことが可能であり、その場合は6次元セルデータの積分数が増加する。積分期間を短く(例えば1スキャン間)した場合、目標の急な運動変化への対応性が良好となる。また、積分期間を長くした場合、積分利得の向上が図れるが、目標の急な運動変化への対応性は劣化するものと考えられる。
【0093】
また、MISO積分部17は、等速直線運動モデルの他に、他の様々な運動モデルを規定する。そして、MISO積分部17は、式(39),(40)に従って6次元セルデータの変化を推定するのと並行して、その他の様々な運動モデルに基づいて6次元セルデータの変化を推定するようにしてもよい。MISO積分部17は、その他の様々な運動モデルに基づいて、移動前の6次元セルデータと、移動後の6次元セルデータとを結び付けるそして、MISO積分部17は、結び付けた6次元セルデータを積分する。実際の目標の運動と、想定した運動モデルとが一致する場合、その運動モデルに基づいて結び付けた6次元セルデータの積分結果が増大することとなる。
【0094】
図1における処理サーバ20は、積分処理部21及び目標検知部22を具備する。
【0095】
積分処理部21は、受信装置RX1〜RXRで取得されたMISO積分の結果を受信し、受信装置RX1〜RXR毎のMISO積分結果に対してSIMO(Single Input Multi Output)積分を行う。積分式は次式で示される。
【数41】
【0096】
積分処理部21は、SIMO積分の結果を目標検知部22へ出力する。
【0097】
目標検知部22は、積分期間中に想定されるMISO積分の積分結果の積分数にしたがい、式(42)で求められるスレッショルド値を設定する。MISO積分の積分結果の積分数に対するスレッショルド値の関係式を以下に示す。
【数42】
【0098】
ここで、Qは積分する積分結果の数、PFAは誤警報確率、PDは探知確率であり、F−1は自由度2R2におけるカイ二乗分布の片側確率の逆関数である。そして、目標検知部22は、積分処理部21からの積分結果のレベルが式(42)で算出されるスレッショルド値を超えた場合、目標を検知したとする。目標検知部22は、仮定した位置及び速度全てについての積分結果のレベルに対して、仮定した位置及び速度毎に、スレッショルド値を超えるか否かを判断する。これにより、仮定した位置及び速度の中から実際に目標が存在する位置及び目標が有する速度が決定されることとなる。
【0099】
図8は、第1の実施形態に係るMIMOレーダシステムが目標を検知する際のフローチャートを示す。
【0100】
まず、受信装置RX1〜RXRは、送信装置TX1〜TXRからの送信信号に対する目標反射波を受信する(ステップS81)。受信装置RX1〜RXRは、信号処理部15により、目標の位置及び目標の速度を仮定し、仮定した位置及び速度に基づいて極座標系の信号を6次元セルデータへ変換する(ステップS82)。そして、受信装置RX1〜RXRは、MISO積分部17により、仮定した運動モデルに従って移動前の6次元セルデータと移動後の6次元セルデータとを結び付け、結び付けた6次元セルデータを積分する(ステップS83)
続いて、積分処理部21は、受信装置RX1〜RXRからの積分結果をSIMO積分する(ステップS84)。
【0101】
続いて、目標検知部22は、積分処理部21から積分結果を受け取り、この積分値が式(42)で算出されるスレッショルド値を超えるか否かを判断する(ステップS85)。目標検知部22は、積分値がスレッショルド値を超える場合(ステップS85のYes)、目標を検知したとして(ステップS86)、目標の検知処理を終了させる。積分値がスレッショルド値を超えない場合(ステップS85のNo)、雑音であるとして(ステップS87)、目標の検知処理を終了させる。
【0102】
以上のように、上記第1の実施形態では、送信装置TX1〜TXRからの送信信号に対する目標反射波は、受信装置RX1〜RXRの位置によりその成分(距離、方向、ドップラ周波数)が異なる。受信装置RX1〜RXRは、座標の原点及び直交軸を共有しており、極座標系で探索した信号を、デカルト座標系を用いた6次元セルデータに変換するようにしている。これにより、受信装置RX1〜RXRは、同一の目標からの目標反射波を共通の座標で扱うことが可能となる。つまり、受信装置RX1〜RXRは、それぞれが遠隔に配置されている場合であっても、目標の位置及び速度を共通の座標で表すことが可能であり、同一成分同士を積分することが可能である。これにより、積分処理部21は、受信装置RX1〜RXRにおける受信信号を合成して処理することが可能となる。
【0103】
また、上記第1の実施形態では、MISO積分部17により、目標の運動モデルを規定し、目標の移動量を推定する。MISO積分部17は、この移動量を参照し、目標の移動に伴って変化する6次元セルデータを推定する。そして、MISO積分部17は、移動前の6次元セルデータと移動後の6次元セルデータとを結び付け、結び付けた6次元セルデータを積分するようにしている。これにより、MISO積分部17は、送信装置TX1〜TXRからの送信信号に対する目標反射波の受信時刻がそれぞれ異なる場合であっても、その目標反射波についての6次元セルデータを積分することが可能となる。
【0104】
したがって、第1の実施形態に係るMIMOレーダシステムは、複数の受信装置が遠隔に配置されている場合であっても、各受信装置で受信された受信信号を同一成分同士で処理することができる。
【0105】
なお、第1の実施形態に係るMIMOレーダシステムでは、MISO積分を行った後にSIMO積分を行う場合を例に説明しているが、まずSIMO積分を行い、その後にMISO積分を行うようにしても構わない。
【0106】
(第2の実施形態)
図9は、第2の実施形態に係わるMIMOレーダシステムの機能構成を示すブロック図である。図9に示すMIMOレーダシステムは、送信装置TX1〜TXR、受信装置RX1〜RXR及び処理サーバ30を具備する。
【0107】
図10は、第2の実施形態に係る受信装置RX1〜RXRの機能構成を示すブロック図である。図11に示す受信装置RX1〜RXRは、無線部11、極座標信号生成部16、信号処理部15及び尤度情報算出部18を備える。
【0108】
尤度情報算出部18は、信号処理部15からの6次元セルデータに基づいて尤度情報を算出する。尤度情報は、6次元セルデータの強度に基づいて、6次元セルデータが雑音である確率を示すものである。尤度情報は、6次元セルデータの振幅をAとすると、以下の式により算出される。
【数43】
【0109】
ここで、σNは、無線部11の雑音電圧である。尤度情報算出部18は、目標について仮定された全ての位置及び速度に基づく6次元セルデータについて尤度情報の算出を行う。尤度情報算出部18は、算出した尤度情報のうち、送信装置TX1〜TXRそれぞれからの送信信号に基づいて算出された尤度情報を掛け合わせる。このとき、送信装置TX1〜TXRは、送信ビームをそれぞれ異なる時刻に目標へ向けるため、送信装置TX1〜TXRからの送信信号に対する目標反射波は、異なる時刻に受信装置RX1〜RXRで受信される。そこで、尤度情報算出部18は、送信ビームを向ける間に移動してしまった目標の移動量を推定するために、目標の運動モデルを規定する。尤度情報算出部18は、規定した運動モデルに基づいて、6次元セルデータの変化を推定する。尤度情報算出部18は、6次元セルデータの変化量に基づいて、移動前の6次元セルデータと移動後の6次元セルデータとを互いに結び付ける。そして、尤度情報算出部18は、互いに結び付けられた6次元セルデータを用いて算出された尤度情報を、以下の式に示すように掛け合わせる。これにより、尤度情報算出部18は、送信装置TX1〜TXRそれぞれからの送信信号に基づく目標反射波についての尤度情報を算出する。
【数44】
【0110】
尤度情報算出部18は、掛け合わせた尤度情報を処理サーバ30へ出力する。
【0111】
処理サーバ30は、尤度情報処理部31及び目標検知部32を具備する。
【0112】
尤度情報処理部31は、受信装置RX1〜RXRからの尤度情報を次式に示すように、それぞれ掛け合わせる。
【数45】
【0113】
尤度情報処理部31は、式(45)によって算出された結合確率を目標検知部32へ出力する。
【0114】
目標検知部32は、尤度情報処理部31で算出された結合確率が、MIMOレーダシステムにおける誤警報確率として設定された値PN以下となるか否かを判定する。目標検知部32は、結合確率が誤警報確率PN以下となる場合、目標が存在すると判断する。目標検知部32は、仮定した位置及び速度全てについての結合確率に対して、仮定した位置及び速度毎に、誤警報確率PN以下となるか否かを判断する。これにより、仮定した位置及び速度の中から実際に目標が存在する位置及び目標が有する速度が決定されることとなる。
【0115】
図11は、第2の実施形態に係るMIMOレーダシステムが、目標を検知する際のフローチャートを示す。
【0116】
まず、受信装置RX1〜RXRは、送信装置TX1〜TXRからの送信信号に対する目標反射波を受信する(ステップS111)。受信装置RX1〜RXRは、信号処理部15により、目標の位置及び目標の速度を仮定し、仮定した位置及び速度に基づいて曲座標系の信号を6次元セルデータへ変換する(ステップS112)。そして、受信装置RX1〜RXRは、尤度情報算出部18により、仮定した運動モデルに従って移動前の6次元セルデータと移動後の6次元セルデータとを結び付け、結び付けた6次元セルデータを用いて算出された尤度情報を掛け合わせる(ステップS113)
続いて、尤度情報処理部31は、受信装置RX1〜RXRからの尤度情報をそれぞれ掛け合わせ、結合確率を算出する(ステップS114)。
【0117】
続いて、目標検知部32は、尤度情報処理部31から結合確率を受け取り、この結合確率が誤警報確率PN以下となるか否かを判断する(ステップS115)。目標検知部32は、結合確率が誤警報確率PN以下となると判断する場合(ステップS115のYes)、目標が存在しているとして(ステップS116)、目標の検知処理を終了させる。目標検知部32は、結合確率が誤警報確率PNを超える場合(ステップS115のNo)、雑音であるとして(ステップS117)、目標の検知処理を終了させる。
【0118】
以上のように、上記第2の実施形態では、尤度情報算出部18により、目標の運動モデルを規定し、目標の移動量を推定する。尤度情報算出部18は、この移動量を参照し、目標の移動に伴って変化する6次元セルデータを推定する。そして、尤度情報算出部18は、移動前の6次元セルデータと移動後の6次元セルデータとを結び付け、無図日付けた6次元セルデータを用いて算出される尤度情報を掛け合わせるようにしている。これにより、尤度情報算出部18は、送信装置TX1〜TXRからの送信信号に対する目標反射波の受信時刻がそれぞれ異なる場合であっても、その目標反射波についての尤度情報を掛け合わせることが可能となる。
【0119】
したがって、第2の実施形態に係るMIMOレーダシステムは、複数の受信装置が遠隔に配置されている場合であっても、各受信装置で受信された受信信号を同一の成分同士で処理することができる。
【0120】
(その他の実施形態)
上記各実施形態では、受信装置RX1〜RXRの極座標信号生成部16が、無線部11からの受信信号をパルス圧縮部12、ドップラフィルタ処理部13及び空間処理部14の順で処理をする例を説明した。しかしながら、これに限定される訳ではない。例えば、極座標信号生成部16が、図12に示すように、無線部11からの受信信号を、空間処理部、パルス圧縮部及びドップラフィルタ処理部の順で処理しても構わない。
【0121】
すなわち、空間処理部は、デジタルビームフォーミングを適用し、無線部11からの受信信号のうち、所望の方向からの信号を抽出する。パルス圧縮部は、空間処理部からの信号に対してパルス圧縮処理を施し、パルス信号毎のレンジデータを生成する。ドップラフィルタ処理部は、M個のパルス信号毎のレンジデータに対してFFT(Fast Fourier Transform)処理を施すことで、極座標系の信号yi,j(m,n,θ,φ)を生成する。
【0122】
また、上記各実施形態では、捜索する全てのレンジセル、パルス信号、方位角及び仰角に対して計算することで、目標を捜索するようにしている。一方、送信ビームのサイドローブレベルが十分に小さく、ビームを向けている方角に目標が存在しない場合は、受信装置RX1〜RXRには目標反射波は到来しない。そのため、このような場合、受信装置RX1〜RXRは、送信装置TX1〜TXRの位置及びCPI毎にビームを向ける仰角及び方位角に基づいて、ビームを向けている方向に含まれるデカルト座標以外のレンジセル、方位角及び仰角については計算を省略してもよい。
【0123】
例えば、パルス圧縮部12は、送信装置TX1〜TXRのビームの方角及びビーム幅からメインビームに含まれるデカルト座標を求め、当該デカルト座標におけるレンジの最小値と最大値の間のレンジセルに対してのみ式(22)の計算を行う。そして、ドップラフィルタ処理部13は、得られたレンジデータに対してのみ式(23)のパルス信号の計算を実施し、空間処理部14は、得られたデータに対して式(27)の空間処理(受信DBF処理)を実施する。
【0124】
また、例えば、空間処理部は、送信装置TX1〜TXRのビームの方角及びビーム幅からメインビームに含まれるデカルト座標を求め、当該デカルト座標におけるレンジの最小値と最大値との間の所望の方向からの信号を抽出する。パルス圧縮部は、空間処理部からの信号に対してパルス圧縮処理を行う。ドップラフィルタ処理部は、得られたレンジデータに対してパルス信号の計算を実施する。
【0125】
ただし、前述した通り送信装置TX1〜TXR毎に位置及びビームを向ける方角が異なるため、対象とする送信装置TX1〜TXR毎に異なる領域の計算を行う必要がある。なお、ビームを向ける方位角及び仰角はCPI毎に異なるため、計算するレンジセル、方位角及び仰角もCPI毎に異なる。
【0126】
また、上記各実施形態では、目標の種類とは関係なく、目標の捜索を行うようにしている。しかしながら、目標の種類によっては、高度毎に移動速度が制限されるものもある。よって、受信装置RX1〜RXRの信号処理部15は、式(37)の変換を行う際に、高度zの値毎に
【数46】
【0127】
の値を制限し、その範囲内でvx,vy,vzの値を決定することで、演算量を削減するようにしても良い。
【0128】
また、信号処理部15は、高度zに応じた確率密度関数で速度が定義できる場合は、確率密度が閾値を超える領域のみで上述の処理を行ってもよいし、計算されたFi,j(x,y,z,vx,vy,vz)の値を確率密度の値に応じて高い重みが乗算されるように加重合成してもよい。
【0129】
また、上記各実施形態では、信号処理部15は、必ずしも全レーダ領域に対して6次元セルへの変換を行う必要はなく、例えば、一般的なモノスタティックレーダ動作で目標を探知できるような近距離に対しては、変換領域から除外してもよい。
【0130】
また、上記各実施形態では、送信装置TX1〜TXRと受信装置RX1〜RXRとが別々の装置である場合を例に説明した。しかし、これに限定される訳ではない。例えば、送信装置TX1と受信装置RX1とが1台のレーダ装置に搭載されている場合であっても構わない。この場合、上述の式において、i=jであれば同一のレーダ装置による送信及び受信を表わしており、i≠jであれば、送信源と受信点が異なるレーダ装置による送信及び受信を表わす。
【0131】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0132】
11…無線部
12…パルス圧縮部
13…ドップラフィルタ部
14…空間処理部
15…信号処理部
16…極座標信号生成部
17…MISO積分部
18…尤度情報算出部
20,30…処理サーバ
21…積分処理部
22,32…目標検知部
31…尤度情報処理部
TX1〜TXj…送信装置
RX1〜RXi…受信装置
【特許請求の範囲】
【請求項1】
互いに無相関となるように変調された送信信号を空間へ向けて送信する複数の送信装置と、
原点及び直交軸をそれぞれが共有し、前記空間へ向けて送信された複数の送信信号が前記空間中の目標で反射・散乱・回折された複数の目標反射波を受信する複数の受信装置であって、
前記受信した複数の目標反射波それぞれに基づいて、前記目標の位置を極座標系で表した複数の極座標信号を生成する極座標信号生成部と、
前記複数の極座標信号それぞれを、前記原点及び直交軸を利用したデカルト座標系により表した複数の6次元セルデータに変換する信号処理部と、
前記複数の6次元セルデータを統合することで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得する6次元セルデータ処理部と
を備える複数の受信装置と、
前記複数の受信装置それぞれからの受信結果に基づいて前記目標を検知する処理サーバと
を具備することを特徴とするMIMOレーダシステム。
【請求項2】
前記6次元セルデータ処理部は、前記複数の6次元セルデータを積分することで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得し、
前記処理サーバは、
前記複数の受信装置それぞれからの受信結果を積分する積分処理部と、
前記積分処理部での前記受信結果の積分数に応じたスレッショルド値を算出し、前記積分処理部での積分結果が、前記スレッショルド値を超える場合、前記目標を検知したと判断する目標検知部と
を備えることを特徴とする請求項1記載のMIMOレーダシステム。
【請求項3】
前記6次元セルデータ処理部は、予め設定された運動モデルを規定し、前記運動モデルにより予測される前記目標の移動に基づいて前記複数の6次元セルデータを関係付け、前記関係付けた複数の6次元セルデータを積分することを特徴とする請求項2記載のMIMOレーダシステム。
【請求項4】
前記6次元セルデータ処理部は、前記複数の6次元セルデータそれぞれについて尤度情報を算出し、前記複数の尤度情報を掛け合わせることで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得し、
前記処理サーバは、
前記複数の受信装置それぞれからの受信結果を掛け合わせる尤度情報処理部と、
前記尤度情報処理部で掛け合わせた結果が、予め設定された誤警報確率以下となる場合、前記目標を検知したと判断する目標検知部と
を備えることを特徴とする請求項1記載のMIMOレーダシステム。
【請求項5】
前記6次元セルデータ処理部は、予め設定された運動モデルを規定し、前記運動モデルにより予測される前記目標の移動に基づいて前記複数の6次元セルデータを関係付け、前記関係付けた複数の6次元セルデータについての前記尤度情報を掛け合わせることを特徴とする請求項4記載のMIMOレーダシステム。
【請求項6】
前記複数の送信装置のうちいずれかの送信装置と、前記複数の受信装置のうちいずれかの受信装置とは、一つのレーダ装置に含まれることを特徴とする請求項1記載のMIMOレーダシステム。
【請求項7】
互いに無相関となるように変調された送信信号を空間へ向けて送信する複数の送信装置と、原点及び直交軸をそれぞれが共有し、前記空間へ向けて送信された複数の送信信号が前記空間中の目標で反射・散乱・回折された複数の目標反射波を受信する複数の受信装置であって、前記複数の目標反射波それぞれに基づいて、前記目標の位置を極座標系で表した複数の極座標信号を生成する極座標信号生成部と、前記複数の極座標信号それぞれを、前記原点及び直交軸を利用したデカルト座標系により表した複数の6次元セルデータに変換する信号処理部と、前記複数の6次元セルデータを統合することで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得する6次元セルデータ処理部とを備える複数の受信装置と、前記複数の受信装置それぞれからの受信結果に基づいて前記目標を検知する処理サーバとを具備するMIMOレーダシステムに用いられる送信装置。
【請求項8】
前記送信信号として、予め設定された周期でパルス信号を繰り返し送信し、予め設定されたM個のパルス信号を送信すると送信方向を変更することを特徴とする請求項7記載の送信装置。
【請求項9】
互いに無相関となるように変調された送信信号を空間へ向けて送信する複数の送信装置と、前記空間へ向けて送信された複数の送信信号が前記空間中の目標で反射・散乱・回折された目標反射波を受信する複数の受信装置とを具備するMIMOレーダシステムで用いられる受信装置であって、
前記複数の目標反射波それぞれに基づいて、前記目標の位置を極座標系で表した複数の極座標信号を生成する極座標信号生成部と、
前記複数の極座標信号それぞれを、前記原点及び直交軸を利用したデカルト座標系により表した複数の6次元セルデータに変換する信号処理部と、
前記複数の6次元セルデータを統合することで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得する6次元セルデータ処理部と
を具備することを特徴とする受信装置。
【請求項10】
前記送信装置は、前記送信信号として、予め設定された周期でパルス信号を繰り返し送信し、予め設定されたM個のパルス信号を送信すると送信方向を変更し、
前記極座標信号生成部は、
前記受信した目標反射波に対してパルス圧縮処理を施し、前記パルス信号毎のレンジデータを生成するパルス圧縮部と、
前記M個のパルス信号毎のレンジデータに対してFFT(Fast Fourier Transform)処理を施すことで、所望のレンジセルのデータを取得するドップラフィルタ処理部と、
デジタルビームフォーミングを適用し、前記所望のレンジセルのデータのうち、所望の方向からのデータを抽出することで、前記極座標信号を生成する空間処理部と
を備えることを特徴とする請求項9記載の受信装置。
【請求項11】
前記送信装置は、前記送信信号として、予め設定された周期でパルス信号を繰り返し送信し、予め設定されたM個のパルス信号を送信すると送信方向を変更し、
前記極座標信号生成部は、
デジタルビームフォーミングを適用し、前記受信した目標反射波のうち、所望の方向からの信号を抽出する空間処理部と、
前記空間処理部からの信号に対してパルス圧縮処理を施し、前記パルス信号毎のレンジデータを生成するパルス圧縮部と、
前記M個のパルス信号毎のレンジデータに対してFFT(Fast Fourier Transform)処理を施すことで、前記極座標信号を生成するドップラフィルタ処理部と
を備えることを特徴とする請求項9記載の受信装置。
【請求項12】
前記6次元セルデータ処理部は、前記複数の6次元セルデータを積分することで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得することを特徴とする請求項9記載の受信装置。
【請求項13】
前記6次元セルデータ処理部は、予め設定された運動モデルを規定し、前記運動モデルにより予測される前記目標の移動に基づいて前記複数の6次元セルデータを関係付け、前記関係付けた複数の6次元セルデータを積分することを特徴とする請求項12記載の受信装置。
【請求項14】
前記6次元セルデータ処理部は、前記複数の6次元セルデータそれぞれについて尤度情報を算出し、前記複数の尤度情報を掛け合わせることで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得することを特徴とする請求項9記載の受信装置。
【請求項15】
前記6次元セルデータ処理部は、予め設定された運動モデルを規定し、前記運動モデルにより予測される前記目標の移動に基づいて前記複数の6次元セルデータを関係付け、前記関係付けた複数の6次元セルデータについての前記尤度情報を掛け合わせることを特徴とする請求項14記載の受信装置。
【請求項16】
前記極座標信号生成部は、前記複数の送信装置の送信ビームの方角及びビーム幅からメインビームに含まれる範囲を前記デカルト座標系で求め、前記デカルト座標の範囲のみについて前記極座標信号を生成することを特徴とする請求項9記載の受信装置。
【請求項17】
前記パルス圧縮部は、前記複数の送信装置の送信ビームの方角及びビーム幅からメインビームに含まれる範囲を前記デカルト座標系で求め、前記デカルト座標の範囲の最小値と最大値の間のレンジセルに対してのみパルス圧縮処理を行い、
前記ドップラフィルタ処理部は、前記パルス圧縮処理を行ったレンジデータに対してFFT処理を施すことで、所望のレンジセルのデータを取得し、
前記空間処理部は、前記ドップラフィルタ処理部で得られたデータのうち、所望の方向からのデータを抽出することを特徴とする請求項10記載の受信装置。
【請求項18】
前記空間処理部は、前記複数の送信装置の送信ビームの方角及びビーム幅からメインビームに含まれる範囲を前記デカルト座標系で求め、前記デカルト座標の範囲の最小値と最大値との間の所望の方向からの信号を抽出し、
前記パルス圧縮部は、前記空間処理部からの信号に対してパルス圧縮処理を行い、
前記ドップラフィルタ処理部は、前記パルス圧縮処理からのレンジデータに対してFFT処理を施すことを特徴とする請求項11記載の受信装置。
【請求項19】
前記信号処理部は、前記目標が存在し得る位置及び取り得る速度を仮定し、前記仮定した位置及び速度に基づいて前記極座標信号を前記6次元セルデータへ変換することを特徴とする請求項9記載の受信装置。
【請求項20】
前記信号処理部は、前記目標の高度に応じて前記目標の速度を仮定することを特徴とする請求項19記載の受信装置。
【請求項21】
前記信号処理部は、前記目標が近距離領域に位置する場合は、前記目標を変換対象から除外することを特徴とする請求項9記載の受信装置。
【請求項22】
互いに無相関となるように変調された送信信号を空間へ向けて送信する複数の送信装置と、前記空間へ向けて送信された複数の送信信号が前記空間中の目標で反射・散乱・回折された複数の目標反射波を受信する複数の受信装置とを具備するMIMOレーダシステムで用いられるMIMOレーダ信号処理方法であって、
前記複数の受信装置に搭載される極座標信号生成部で、前記受信した複数の目標反射波それぞれに基づいて、前記目標の位置を極座標系で表した複数の極座標信号を生成し、
前記複数の受信装置に搭載される信号処理部で、前記複数の受信装置間で共有される原点及び直交軸を予め記録し、
前記信号処理部で、前記複数の極座標信号それぞれを、前記原点及び直交軸を利用したデカルト座標系により表した複数の6次元セルデータに変換し、
前記複数の受信装置に搭載される6次元セルデータ処理部で、前記複数の6次元セルデータを統合することで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得し、
処理サーバで、前記複数の受信装置それぞれからの受信結果に基づいて前記目標を検知することを特徴とするMIMOレーダ信号処理方法。
【請求項1】
互いに無相関となるように変調された送信信号を空間へ向けて送信する複数の送信装置と、
原点及び直交軸をそれぞれが共有し、前記空間へ向けて送信された複数の送信信号が前記空間中の目標で反射・散乱・回折された複数の目標反射波を受信する複数の受信装置であって、
前記受信した複数の目標反射波それぞれに基づいて、前記目標の位置を極座標系で表した複数の極座標信号を生成する極座標信号生成部と、
前記複数の極座標信号それぞれを、前記原点及び直交軸を利用したデカルト座標系により表した複数の6次元セルデータに変換する信号処理部と、
前記複数の6次元セルデータを統合することで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得する6次元セルデータ処理部と
を備える複数の受信装置と、
前記複数の受信装置それぞれからの受信結果に基づいて前記目標を検知する処理サーバと
を具備することを特徴とするMIMOレーダシステム。
【請求項2】
前記6次元セルデータ処理部は、前記複数の6次元セルデータを積分することで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得し、
前記処理サーバは、
前記複数の受信装置それぞれからの受信結果を積分する積分処理部と、
前記積分処理部での前記受信結果の積分数に応じたスレッショルド値を算出し、前記積分処理部での積分結果が、前記スレッショルド値を超える場合、前記目標を検知したと判断する目標検知部と
を備えることを特徴とする請求項1記載のMIMOレーダシステム。
【請求項3】
前記6次元セルデータ処理部は、予め設定された運動モデルを規定し、前記運動モデルにより予測される前記目標の移動に基づいて前記複数の6次元セルデータを関係付け、前記関係付けた複数の6次元セルデータを積分することを特徴とする請求項2記載のMIMOレーダシステム。
【請求項4】
前記6次元セルデータ処理部は、前記複数の6次元セルデータそれぞれについて尤度情報を算出し、前記複数の尤度情報を掛け合わせることで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得し、
前記処理サーバは、
前記複数の受信装置それぞれからの受信結果を掛け合わせる尤度情報処理部と、
前記尤度情報処理部で掛け合わせた結果が、予め設定された誤警報確率以下となる場合、前記目標を検知したと判断する目標検知部と
を備えることを特徴とする請求項1記載のMIMOレーダシステム。
【請求項5】
前記6次元セルデータ処理部は、予め設定された運動モデルを規定し、前記運動モデルにより予測される前記目標の移動に基づいて前記複数の6次元セルデータを関係付け、前記関係付けた複数の6次元セルデータについての前記尤度情報を掛け合わせることを特徴とする請求項4記載のMIMOレーダシステム。
【請求項6】
前記複数の送信装置のうちいずれかの送信装置と、前記複数の受信装置のうちいずれかの受信装置とは、一つのレーダ装置に含まれることを特徴とする請求項1記載のMIMOレーダシステム。
【請求項7】
互いに無相関となるように変調された送信信号を空間へ向けて送信する複数の送信装置と、原点及び直交軸をそれぞれが共有し、前記空間へ向けて送信された複数の送信信号が前記空間中の目標で反射・散乱・回折された複数の目標反射波を受信する複数の受信装置であって、前記複数の目標反射波それぞれに基づいて、前記目標の位置を極座標系で表した複数の極座標信号を生成する極座標信号生成部と、前記複数の極座標信号それぞれを、前記原点及び直交軸を利用したデカルト座標系により表した複数の6次元セルデータに変換する信号処理部と、前記複数の6次元セルデータを統合することで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得する6次元セルデータ処理部とを備える複数の受信装置と、前記複数の受信装置それぞれからの受信結果に基づいて前記目標を検知する処理サーバとを具備するMIMOレーダシステムに用いられる送信装置。
【請求項8】
前記送信信号として、予め設定された周期でパルス信号を繰り返し送信し、予め設定されたM個のパルス信号を送信すると送信方向を変更することを特徴とする請求項7記載の送信装置。
【請求項9】
互いに無相関となるように変調された送信信号を空間へ向けて送信する複数の送信装置と、前記空間へ向けて送信された複数の送信信号が前記空間中の目標で反射・散乱・回折された目標反射波を受信する複数の受信装置とを具備するMIMOレーダシステムで用いられる受信装置であって、
前記複数の目標反射波それぞれに基づいて、前記目標の位置を極座標系で表した複数の極座標信号を生成する極座標信号生成部と、
前記複数の極座標信号それぞれを、前記原点及び直交軸を利用したデカルト座標系により表した複数の6次元セルデータに変換する信号処理部と、
前記複数の6次元セルデータを統合することで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得する6次元セルデータ処理部と
を具備することを特徴とする受信装置。
【請求項10】
前記送信装置は、前記送信信号として、予め設定された周期でパルス信号を繰り返し送信し、予め設定されたM個のパルス信号を送信すると送信方向を変更し、
前記極座標信号生成部は、
前記受信した目標反射波に対してパルス圧縮処理を施し、前記パルス信号毎のレンジデータを生成するパルス圧縮部と、
前記M個のパルス信号毎のレンジデータに対してFFT(Fast Fourier Transform)処理を施すことで、所望のレンジセルのデータを取得するドップラフィルタ処理部と、
デジタルビームフォーミングを適用し、前記所望のレンジセルのデータのうち、所望の方向からのデータを抽出することで、前記極座標信号を生成する空間処理部と
を備えることを特徴とする請求項9記載の受信装置。
【請求項11】
前記送信装置は、前記送信信号として、予め設定された周期でパルス信号を繰り返し送信し、予め設定されたM個のパルス信号を送信すると送信方向を変更し、
前記極座標信号生成部は、
デジタルビームフォーミングを適用し、前記受信した目標反射波のうち、所望の方向からの信号を抽出する空間処理部と、
前記空間処理部からの信号に対してパルス圧縮処理を施し、前記パルス信号毎のレンジデータを生成するパルス圧縮部と、
前記M個のパルス信号毎のレンジデータに対してFFT(Fast Fourier Transform)処理を施すことで、前記極座標信号を生成するドップラフィルタ処理部と
を備えることを特徴とする請求項9記載の受信装置。
【請求項12】
前記6次元セルデータ処理部は、前記複数の6次元セルデータを積分することで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得することを特徴とする請求項9記載の受信装置。
【請求項13】
前記6次元セルデータ処理部は、予め設定された運動モデルを規定し、前記運動モデルにより予測される前記目標の移動に基づいて前記複数の6次元セルデータを関係付け、前記関係付けた複数の6次元セルデータを積分することを特徴とする請求項12記載の受信装置。
【請求項14】
前記6次元セルデータ処理部は、前記複数の6次元セルデータそれぞれについて尤度情報を算出し、前記複数の尤度情報を掛け合わせることで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得することを特徴とする請求項9記載の受信装置。
【請求項15】
前記6次元セルデータ処理部は、予め設定された運動モデルを規定し、前記運動モデルにより予測される前記目標の移動に基づいて前記複数の6次元セルデータを関係付け、前記関係付けた複数の6次元セルデータについての前記尤度情報を掛け合わせることを特徴とする請求項14記載の受信装置。
【請求項16】
前記極座標信号生成部は、前記複数の送信装置の送信ビームの方角及びビーム幅からメインビームに含まれる範囲を前記デカルト座標系で求め、前記デカルト座標の範囲のみについて前記極座標信号を生成することを特徴とする請求項9記載の受信装置。
【請求項17】
前記パルス圧縮部は、前記複数の送信装置の送信ビームの方角及びビーム幅からメインビームに含まれる範囲を前記デカルト座標系で求め、前記デカルト座標の範囲の最小値と最大値の間のレンジセルに対してのみパルス圧縮処理を行い、
前記ドップラフィルタ処理部は、前記パルス圧縮処理を行ったレンジデータに対してFFT処理を施すことで、所望のレンジセルのデータを取得し、
前記空間処理部は、前記ドップラフィルタ処理部で得られたデータのうち、所望の方向からのデータを抽出することを特徴とする請求項10記載の受信装置。
【請求項18】
前記空間処理部は、前記複数の送信装置の送信ビームの方角及びビーム幅からメインビームに含まれる範囲を前記デカルト座標系で求め、前記デカルト座標の範囲の最小値と最大値との間の所望の方向からの信号を抽出し、
前記パルス圧縮部は、前記空間処理部からの信号に対してパルス圧縮処理を行い、
前記ドップラフィルタ処理部は、前記パルス圧縮処理からのレンジデータに対してFFT処理を施すことを特徴とする請求項11記載の受信装置。
【請求項19】
前記信号処理部は、前記目標が存在し得る位置及び取り得る速度を仮定し、前記仮定した位置及び速度に基づいて前記極座標信号を前記6次元セルデータへ変換することを特徴とする請求項9記載の受信装置。
【請求項20】
前記信号処理部は、前記目標の高度に応じて前記目標の速度を仮定することを特徴とする請求項19記載の受信装置。
【請求項21】
前記信号処理部は、前記目標が近距離領域に位置する場合は、前記目標を変換対象から除外することを特徴とする請求項9記載の受信装置。
【請求項22】
互いに無相関となるように変調された送信信号を空間へ向けて送信する複数の送信装置と、前記空間へ向けて送信された複数の送信信号が前記空間中の目標で反射・散乱・回折された複数の目標反射波を受信する複数の受信装置とを具備するMIMOレーダシステムで用いられるMIMOレーダ信号処理方法であって、
前記複数の受信装置に搭載される極座標信号生成部で、前記受信した複数の目標反射波それぞれに基づいて、前記目標の位置を極座標系で表した複数の極座標信号を生成し、
前記複数の受信装置に搭載される信号処理部で、前記複数の受信装置間で共有される原点及び直交軸を予め記録し、
前記信号処理部で、前記複数の極座標信号それぞれを、前記原点及び直交軸を利用したデカルト座標系により表した複数の6次元セルデータに変換し、
前記複数の受信装置に搭載される6次元セルデータ処理部で、前記複数の6次元セルデータを統合することで、前記複数の送信装置からの送信信号に対する複数の目標反射波についての受信結果を取得し、
処理サーバで、前記複数の受信装置それぞれからの受信結果に基づいて前記目標を検知することを特徴とするMIMOレーダ信号処理方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−68224(P2012−68224A)
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願番号】特願2011−13006(P2011−13006)
【出願日】平成23年1月25日(2011.1.25)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願日】平成23年1月25日(2011.1.25)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]